
車両用駆動装置の制御装置
【課題】エンジンとエンジン断続用クラッチと電動機と流体伝動装置とを備えた車両用駆動装置において、燃費悪化を抑制することができる車両用駆動装置の制御装置を提供する。
【解決手段】クラッチスリップ制御手段148は、車両6の加速操作時には、エンジン回転速度Neをタービン回転速度Ntに一致させるようにエンジン断続用クラッチK0をスリップさせるクラッチスリップ制御を実行する。従って、車両6の加速操作時にエンジン断続用クラッチK0を完全係合状態にする場合と比較して、車両加速中のエンジン10の回転加速度が低められエンジン10の慣性トルクが小さくなり、エンジン回転速度Neが低く推移するので、車両6の燃費悪化を抑制することができる。また、前記クラッチスリップ制御ではエンジン回転速度Neはタービン回転速度Ntに一致するように制御されるので、運転者に与える違和感を低減できる。
【解決手段】クラッチスリップ制御手段148は、車両6の加速操作時には、エンジン回転速度Neをタービン回転速度Ntに一致させるようにエンジン断続用クラッチK0をスリップさせるクラッチスリップ制御を実行する。従って、車両6の加速操作時にエンジン断続用クラッチK0を完全係合状態にする場合と比較して、車両加速中のエンジン10の回転加速度が低められエンジン10の慣性トルクが小さくなり、エンジン回転速度Neが低く推移するので、車両6の燃費悪化を抑制することができる。また、前記クラッチスリップ制御ではエンジン回転速度Neはタービン回転速度Ntに一致するように制御されるので、運転者に与える違和感を低減できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジンと電動機とを備えた車両用駆動装置において燃費悪化を抑制する制御に関するものである。
【背景技術】
【0002】
エンジン断続用クラッチを介して駆動輪に連結されたエンジンと、そのエンジン断続用クラッチとその駆動輪との間の動力伝達経路に連結された電動機とを備えた車両用駆動装置の制御装置がよく知られている。例えば、特許文献1に記載された車両用駆動装置の制御装置がそれである。その特許文献1の車両用駆動装置では、エンジン側から駆動輪側に向けて、エンジン、エンジン断続用クラッチ、電動機、変速機、発進クラッチ、及び出力軸の順に直列に連結されている。この車両用駆動装置の制御装置は、電動機単独での走行であるEV走行ではエンジン断続用クラッチを解放しそれによりエンジンを駆動輪から切り離している。そして、上記制御装置は、そのEV走行中にエンジンを始動させる場合、上記発進クラッチをスリップ制御しながら電動機の回転速度を上昇させ、その電動機の回転速度が所定の回転速度に達したときに前記エンジン断続用クラッチを係合させエンジンと電動機とを連結する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−255285号公報
【特許文献2】特開平10−68335号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1の車両用駆動装置の制御装置は、エンジン単独またはエンジンおよび電動機での走行であるエンジン走行を行う場合、前記エンジン断続用クラッチを係合状態としてエンジンを駆動輪に連結する。また、上記特許文献1の車両用駆動装置は動力伝達経路にトルクコンバータなどの流体伝動装置を含んでいないが、その流体伝動装置がエンジン及び電動機で構成される駆動力源と駆動輪との間に介装されている車両用駆動装置も考え得る。例えば上記流体伝動装置が設けられていることで滑らかな車両発進を実現し易くなる。そのように流体伝動装置を含む車両用駆動装置では、エンジン走行においてアクセルペダルが大きく踏み込まれた場合などの車両加速時には、流体伝動装置の入力回転速度はその出力回転速度を迅速に引き上げるために出力回転速度よりも一時的に高められ、その一時的な上昇の後には出力回転速度に一致するように低下させられる。そうすると、上記エンジン走行中の車両加速時には、前記エンジン断続用クラッチが係合状態であるので、エンジン回転速度も流体伝動装置の入力回転速度と同一の回転速度で一時的に上昇することになり、そのエンジン回転速度の時間変化率(エンジン回転加速度)に応じた慣性トルク(イナーシャトルク)が発生する。更に、エンジンの慣性モーメントは例えば電動機等の他の回転要素と比較して大きく、その慣性モーメントが大きいほど上記慣性トルクも大きくなる。このように車両加速時にエンジンの慣性トルクが一時的に大きくなるとすれば、このエンジンの慣性トルクに対抗してエンジン出力または電動機出力が消費されるので、車両の燃費悪化につながる可能性があった。以上のような課題は未公知である。更に、エンジンの一般的な特性としてエンジン回転速度が高いほど燃費悪化につながり易い傾向がある。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、エンジン断続用クラッチを介してエンジンからの動力が入力される入力側回転要素と駆動輪へ動力を出力する出力側回転要素とを有する流体伝動装置と、前記入力側回転要素に連結された電動機とを備えた車両用駆動装置において、燃費悪化を抑制することができる車両用駆動装置の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
前記目的を達成するための本発明の要旨とするところは、(a)エンジン断続用クラッチを介してエンジンからの動力が入力される入力側回転要素と駆動輪へ動力を出力する出力側回転要素とを有する流体伝動装置と、前記入力側回転要素に連結された電動機とを備えた車両用駆動装置の制御装置であって、(b)車両の加速操作時には、前記電動機により前記入力側回転要素が回転駆動され、それと共に、前記エンジンの回転速度を前記出力側回転要素の回転速度に追従させるように前記エンジン断続用クラッチをスリップさせるクラッチスリップ制御を実行することにある。
【発明の効果】
【0007】
このようにすれば、車両の加速操作時に前記エンジン断続用クラッチをスリップしない係合状態(完全係合状態)にしてエンジン回転速度を前記入力側回転要素と同一の回転速度とする場合と比較して、車両加速中のエンジンの回転加速度が低められエンジンの慣性トルクが小さくなり、エンジン回転速度が低く推移するので、車両の燃費悪化を抑制することができる。また、前記流体伝動装置の出力側回転要素の回転速度は車速に対応しており、前記クラッチスリップ制御ではエンジン回転速度はその出力側回転要素の回転速度に一致するように制御されるので、エンジン回転速度は車速上昇に同調して上昇することになる。そのため、加速操作時にエンジン回転速度が上記出力側回転要素の回転速度と一致するように制御されない場合と比較して、運転者に与える違和感を低減できる。例えば、加速操作後の車速上昇が緩やかであるにも拘らずエンジン回転速度が急上昇すれば、車両の加速が上記加速操作に対して遅れているような違和感を運転者に対して与えることがある。なお、例えば燃費とは単位燃料消費量当たりの走行距離等であり、燃費の向上とはその単位燃料消費量当たりの走行距離が長くなることであり、或いは、車両全体としての燃料消費率(=燃料消費量/駆動輪出力)が小さくなることである。逆に、燃費の低下もしくは燃費の悪化とはその単位燃料消費量当たりの走行距離が短くなることであり、或いは、車両全体としての燃料消費率が大きくなることである。
【0008】
ここで、好適には、前記クラッチスリップ制御の実行中に、前記入力側回転要素の回転速度と前記エンジンの回転速度との差回転が予め定められた差回転上限値よりも大きい状態が、所定の判定時間以上継続した場合には、前記エンジン断続用クラッチをスリップさせつつ前記エンジンの回転速度を前記出力側回転要素の回転速度よりも高くする。このようにすれば、前記エンジン断続用クラッチのスリップがある程度抑制されるので、前記エンジン断続用クラッチの耐久性を確保しつつ、前記クラッチスリップ制御を実行することが可能である。
【0009】
また、好適には、(a)前記流体伝動装置は、その流体伝動装置の入力側回転要素と出力側回転要素とを直結可能なロックアップクラッチを備えており、(b)そのロックアップクラッチが解放状態であるときに前記クラッチスリップ制御を実行する。このようにすれば、車両の加速操作時において前記入力側回転要素の回転速度はロックアップクラッチが解放状態であるときに前記出力側回転要素の回転速度よりも高くなり得るので、ロックアップクラッチの作動状態に応じた適切な時期に前記クラッチスリップ制御を実行することが可能である。
【0010】
また、好適には、運転者により要求される要求駆動トルクに対して前記電動機がトルク不足にならないことを条件に、前記クラッチスリップ制御を実行する。このようにすれば、車両の走行性能を損なわないように前記クラッチスリップ制御を実行することが可能である。
【0011】
また、好適には、前記電動機は前記流体伝動装置の入力側回転要素に作動的に連結され、或いは、直接連結されている。
【0012】
また、好適には、前記車両用駆動装置は、前記流体伝動装置と前記駆動輪との間に介装された変速機を備えている。言い換えれば、前記流体伝動装置の出力側回転要素は上記変速機を介して上記駆動輪へ動力を出力する。
【0013】
また、好適には、前記エンジン、前記エンジン断続用クラッチ、前記電動機、前記流体伝動装置、及び前記変速機は、一軸心上に順次直列に連結されている。
【0014】
また、好適には、前記エンジン、前記流体伝動装置、前記変速機、及び前記電動機は、それらの軸心が、前記駆動輪に連結され且つその駆動輪を回転駆動する駆動車軸の軸方向と平行になるように配設されている。
【図面の簡単な説明】
【0015】
【図1】本発明が好適に適用される車両用駆動装置の構成を説明するための骨子図である。
【図2】図1の車両用駆動装置から駆動輪までの動力伝達経路を表した図である。
【図3】図1の車両用駆動装置が備える自動変速機において複数の変速段(ギヤ段)を成立させる際の係合要素の作動状態を説明する作動表である。
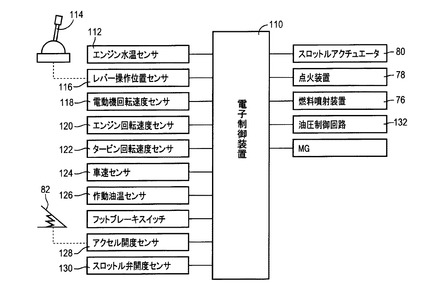
【図4】図1の車両用駆動装置に設けられた電子制御装置の入出力信号を説明する図である。
【図5】図1の車両用駆動装置に設けられたトルクコンバータのポンプ回転速度およびタービン回転速度とエンジン回転速度との車両発進時におけるタイムチャートである。
【図6】図4の電子制御装置に備えられた制御機能の要部を説明する機能ブロック線図である。
【図7】図1の車両用駆動装置における車両発進時のタイムチャートであって、アクセルペダルの踏込操作に応じてエンジン始動される共にそのエンジン始動後にクラッチスリップ制御が実行されたときのタイムチャートである。
【図8】図1の車両用駆動装置において実行されるクラッチスリップ制御でエンジン断続用クラッチの係合圧を決定するために用いられる係合圧マップの一例である。
【図9】図1の車両用駆動装置の車両走行中における加速時のタイムチャートであって、図7と同様に、アクセルペダルの踏込操作に応じてエンジン始動される共にそのエンジン始動後にクラッチスリップ制御が実行されたときのタイムチャートである。
【図10】図7のタイムチャートにおいて、クラッチスリップ制御で目標差回転にガードがかけられた場合のタイムチャートである。
【図11】図9のタイムチャートにおいて、クラッチスリップ制御で目標差回転にガードがかけられた場合のタイムチャートである。
【図12】図1の車両用駆動装置で、クラッチスリップ制御の実行中に電動機が要求駆動トルクに対してトルク不足になると判断された場合におけるエンジン断続用クラッチの係合タイミングとエンジン回転速度の変化とを説明するためのタイムチャートである。
【図13】図4の電子制御装置の制御作動の要部、すなわち、前記クラッチスリップ制御を実行する制御作動を説明するためのフローチャートである。
【図14】図13のSA10にて実行される制御作動を説明するためのフローチャートである。
【図15】図1の車両用駆動装置とは別の本発明が好適に適用される車両用駆動装置であって、エンジンとエンジン断続用クラッチと電動機とトルクコンバータと自動変速機とが一軸心上に順次直列に連結された車両用駆動装置を例示した概略図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【実施例】
【0017】
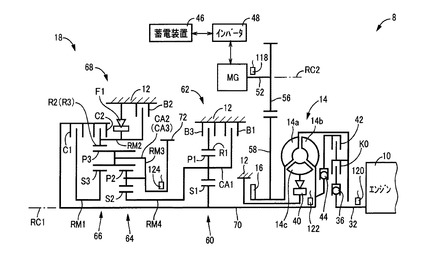
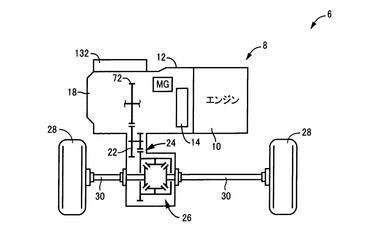
図1は、本発明が好適に適用される車両用駆動装置8(以下、「駆動装置8」という)の構成を説明するための骨子図である。図2は、駆動装置8から駆動輪28までの動力伝達経路を表した図である。なお、自動変速機18及びトルクコンバータ14等は中心線(第1軸心RC1)に対して略対称的に構成されており、図1ではその中心線の下半分が省略されている。図1において第1軸心RC1はエンジン10およびトルクコンバータ14の回転軸心であり、第2軸心RC2は電動機MGの回転軸心である。
【0018】
図1に示すように、駆動装置8は、ガソリンエンジンやディーゼルエンジン等の内燃機関であるエンジン10と、車体にボルト止め等によって取り付けられる非回転部材としてのトランスアクスルケース(T/Aケース)12(以下、「ケース12」という)とを有し、そのケース12内において、エンジン10側から、エンジン断続用クラッチK0、トルクコンバータ14、油圧ポンプ16、及び自動変速機18を、第1軸心RC1上において順番にすなわち直列に備え、且つ、その第1軸心RC1と平行な第2軸心RC2まわりに回転駆動される電動機MGを備えている。更に、図2に示すように、駆動装置8は、ケース12内において、自動変速機18の出力回転部材である出力歯車72と噛み合うカウンタドリブンギヤ22、ファイナルギヤ対24、及び、そのファイナルギヤ対24を介してカウンタドリブンギヤ22に連結された差動歯車装置(ディファレンシャルギヤ)26を備えている。このように構成された駆動装置8は、例えば前輪駆動すなわちFF(フロントエンジン・フロントドライブ)型の車両6の前方に横置きされ、駆動輪28を駆動するために好適に用いられるものである。駆動装置8において、エンジン10の動力は、エンジン断続用クラッチK0が係合された場合に、エンジン10のクランク軸32すなわちエンジン出力軸32から、エンジン断続用クラッチK0、トルクコンバータ14、自動変速機18、カウンタドリブンギヤ22、ファイナルギヤ対24、差動歯車装置26、および1対の駆動車軸30等を順次介して1対の駆動輪28へ伝達される。
【0019】
トルクコンバータ14は、エンジン10と駆動輪28との間の動力伝達経路の一部を構成し、第1軸心RC1まわりに回転するように配設された流体伝動装置であり、ポンプ翼車14aとタービン翼車14bとステータ翼車14cとを備えている。そして、トルクコンバータ14は、ポンプ翼車14aに入力された駆動力を自動変速機18へ流体を介して伝達する。このトルクコンバータ14のポンプ翼車14aは、エンジン断続用クラッチK0を介してエンジン10のクランク軸32に連結されている。すなわち、ポンプ翼車14aは、エンジン10からの駆動力がエンジン断続用クラッチK0の係合または解放により選択的に入力され且つ第1軸心RC1まわりに回転可能な入力側回転要素である。タービン翼車14bはトルクコンバータ14の出力側回転要素であり、自動変速機18の入力軸である変速機入力軸70にスプライン嵌合等によって相対回転不能に連結されている。ステータ翼車14cは、ケース12に一方向クラッチ40を介して連結されている。すなわち、ステータ翼車14cは、一方向クラッチ40を介して非回転部材に連結されている。なお、入力ダンパ36がエンジン断続用クラッチK0とエンジン10のクランク軸32との間に介装されており、その入力ダンパ36は、エンジン断続用クラッチK0が係合された場合にポンプ翼車14aとエンジン10との間のトルクの脈動を吸収しつつトルク伝達を行う。
【0020】
また、トルクコンバータ14は、ロックアップクラッチ42とロックアップクラッチダンパ44とを備えている。そのロックアップクラッチ42は、ポンプ翼車14aとタービン翼車14bとの間に介装されポンプ翼車14aとタービン翼車14bと選択的に連結する直結クラッチであり、油圧制御等により係合状態(ロックアップオン状態)、スリップ状態(フレックス状態)、或いは解放状態(ロックアップオフ状態)とされるようになっている。ロックアップクラッチ42が係合状態とされることにより、厳密に言えば、完全係合状態とされることにより、上記ポンプ翼車14a及びタービン翼車14bが第1軸心RC1まわりに一体回転させられる。また、ロックアップクラッチダンパ44は、前述した入力ダンパ36と同様の機能を備え、ロックアップクラッチ42とタービン翼車14bとの間に介装されている。
【0021】
エンジン断続用クラッチK0は、エンジン10とトルクコンバータ14のポンプ翼車14aとの間の動力伝達を断続する動力断続装置として機能している。例えば、エンジン断続用クラッチK0は互いに重ねられた複数枚の摩擦板が油圧アクチュエータにより押圧される湿式多板型の油圧式摩擦係合装置であり、油圧ポンプ16が発生させる油圧を元圧とし駆動装置8が有する油圧制御回路132によって係合解放制御される。そして、その係合解放制御においてはエンジン断続用クラッチK0の動力伝達可能なトルク容量すなわちエンジン断続用クラッチK0の係合力が、上記油圧制御回路132内のリニヤソレノイドバルブ等の調圧により例えば連続的に変化させられる。エンジン断続用クラッチK0は、それの解放状態において第1軸心RC1まわりに相対回転可能な1対のクラッチ回転部材(クラッチハブ及びクラッチドラム)を備えており、そのクラッチ回転部材の一方(クラッチハブ)はエンジン10のクランク軸32に相対回転不能に連結されている一方で、そのクラッチ回転部材の他方(クラッチドラム)はトルクコンバータ14のポンプ翼車14aに相対回転不能に連結されている。このような構成から、エンジン断続用クラッチK0は、係合状態では、ポンプ翼車14aをエンジン10のクランク軸32と一体的に回転させる。すなわち、エンジン断続用クラッチK0の係合状態では、エンジン10からの駆動力がポンプ翼車14aに入力される。一方で、エンジン断続用クラッチK0は解放状態では、ポンプ翼車14aとエンジン10との間の動力伝達を遮断する。
【0022】
電動機MGは、第1軸心RC1と平行な第2軸心RC2を回転軸心として配設されており、駆動力を出力するモータ機能と共に蓄電装置46に充電する発電機能をも有する所謂モータジェネレータである。この電動機MGの出力軸である電動機出力軸52には電動機出力ギヤ56が相対回転不能に連結されており、その電動機出力ギヤ56は、トルクコンバータ14のポンプ翼車14aに相対回転不能に連結された電動機連結ギヤ58と相互に噛み合っている。すなわち、電動機MGは、電動機出力ギヤ56と電動機連結ギヤ58とから構成されたギヤ対を介して、上記ポンプ翼車14aに連結されると共にエンジン10にも連結されており、更に、トルクコンバータ14を介して変速機入力軸70に連結されている。
【0023】
また、電動機出力ギヤ56のピッチ円直径は電動機連結ギヤ58のピッチ円直径よりも小さい。すなわち、電動機出力ギヤ56の歯数は電動機連結ギヤ58の歯数よりも少ないので、電動機MGの回転は減速されてポンプ翼車14aに伝達される。言い換えれば、電動機MGの出力トルクTmg(以下、「電動機トルクTmg」という)は増幅されて電動機MGからポンプ翼車14aに伝達される。
【0024】
自動変速機18は、トルクコンバータ14から駆動輪28(図2参照)までの動力伝達経路の一部を構成し、エンジン10および電動機MGからの駆動力が入力される変速機である。そして、自動変速機18は、複数の油圧式摩擦係合装置(クラッチC、ブレーキB)具体的には5つの油圧式摩擦係合装置を備え、その複数の油圧式摩擦係合装置の何れかの掴み替えにより複数の変速段(ギヤ段)が選択的に成立させられる変速機である。端的に言えば、一般的な車両によく用いられる所謂クラッチツゥクラッチ変速を行う有段変速機である。図1に示すようにその自動変速機18は、シングルピニオン型の第1遊星歯車装置60を主体として構成されている第1変速部62と、ダブルピニオン型の第2遊星歯車装置64およびシングルピニオン型の第3遊星歯車装置66を主体としてラビニヨ型に構成されている第2変速部68とを同軸線上(第1軸心RC1上)に有し、変速機入力軸70の回転を変速して出力歯車72から出力する。その変速機入力軸70は自動変速機18の入力部材に相当するものであり、本実施例ではトルクコンバータ14のタービン翼車14bによって回転駆動されるタービン軸である。また、上記出力歯車72は自動変速機18の出力部材に相当するものであり、カウンタドリブンギヤ22(図2参照)と相互に噛み合いそのカウンタドリブンギヤ22と共に1対のギヤ対を構成している。また、図2に示すように、出力歯車72の回転は、カウンタドリブンギヤ22、ファイナルギヤ対24、差動歯車装置26、及び一対の駆動車軸30を順次介して一対の駆動輪(前輪)28へ伝達されるので、出力歯車72の回転速度である自動変速機18の出力回転速度Nout(rpm)が高いほど車速V(km/h)も高くなり、出力回転速度Noutは車速Vと一対一で対応する。
【0025】
上記第1変速部62を構成している第1遊星歯車装置60は、第1サンギヤS1と、第1ピニオンギヤP1と、その第1ピニオンギヤP1を自転および公転可能に支持する第1キャリヤCA1と、第1ピニオンギヤP1を介して第1サンギヤS1と噛み合う第1リングギヤR1とを備え、第1サンギヤS1、第1キャリアCA1、および第1リングギヤR1によって各々3つの回転要素が構成されている。第1遊星歯車装置60では、第1サンギヤS1が変速機入力軸70に連結されて回転駆動されるとともに、第1リングギヤR1が第3ブレーキB3を介して回転不能にケース12に固定されることにより、中間出力部材としての第1キャリアCA1が変速機入力軸70に対して減速回転させられる。
【0026】
前記第2変速部68を構成している第2遊星歯車装置64は、第2サンギヤS2と、互いに噛み合い1対を成す第2ピニオンギヤP2および第3ピニオンギヤP3と、そのピニオンギヤP2およびP3を自転および公転可能に支持する第2キャリヤCA2と、ピニオンギヤP2およびP3を介して第2サンギヤS2と噛み合う第2リングギヤR2とを備えている。また、第2変速部68を構成している第3遊星歯車装置66は、第3サンギヤS3と、第3ピニオンギヤP3と、その第3ピニオンギヤP3を自転および公転可能に支持する第3キャリヤCA3と、第3ピニオンギヤP3を介して第3サンギヤS3と噛み合う第3リングギヤR3とを備えている。そして、第2遊星歯車装置64および第3遊星歯車装置66では、一部が互いに連結されることによって4つの回転要素RM1〜RM4が構成されている。具体的には、第3遊星歯車装置66の第3サンギヤS3によって第1回転要素RM1が構成され、第2遊星歯車装置64の第2リングギヤR2および第3遊星歯車装置66の第3リングギヤR3が互いに連結されて第2回転要素RM2が構成され、第2遊星歯車装置64の第2キャリアCA2および第3遊星歯車装置66の第3キャリアCA3が互いに連結されて第3回転要素RM3が構成され、第2遊星歯車装置64の第2サンギヤS2によって第4回転要素RM4が構成されている。上記第2遊星歯車装置64および第3遊星歯車装置66は、第2、第3キャリアCA2およびCA3が共通の部材にて構成されているとともに、第2、第3リングギヤR2およびR3が共通の部材にて構成されており、且つ第3遊星歯車装置66の第3ピニオンギヤP3が第2遊星歯車装置64の一方のピニオンギヤを兼ねているラビニヨ型の遊星歯車列とされている。
【0027】
また、上記第1回転要素RM1(第3サンギヤS3)は第1クラッチC1を介して選択的に変速機入力軸70に連結される。第2回転要素RM2(リングギヤR2、R3)は第2クラッチC2を介して選択的に変速機入力軸70に連結されると共に、第2ブレーキB2によって選択的にケース12に連結されて回転停止させられる。第4回転要素RM4(第2サンギヤS2)は第1遊星歯車装置60の第1キャリアCA1に一体的に連結されており、第1ブレーキB1によって選択的にケース12に連結されて回転停止させられる。第3回転要素RM3(キャリアCA2、CA3)は出力歯車72に一体的に連結されて回転を出力するようになっている。なお、第2回転要素RM2とケース12との間には、第2回転要素RM2の正回転(変速機入力軸70と同じ回転方向)を許容しつつ逆回転を阻止する係合要素である一方向クラッチF1が第2ブレーキB2と並列に設けられている。
【0028】
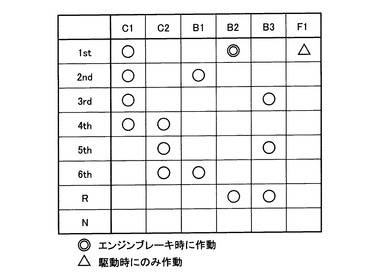
上記クラッチC1、C2およびブレーキB1、B2、B3(以下、特に区別しない場合は単に「クラッチC」、「ブレーキB」という)は、湿式多板型のクラッチやブレーキなど油圧アクチュエータによって係合解放制御される油圧式摩擦係合装置(油圧式摩擦係合要素)であり、油圧ポンプ16が発生させる油圧を元圧とし駆動装置8が有する油圧制御回路132によってそれぞれ係合解放制御され、その油圧制御回路132内のリニヤソレノイドバルブ等の調圧によりクラッチCおよびブレーキBのそれぞれのトルク容量すなわち係合力が例えば連続的に変化させられる。そのクラッチCおよびブレーキBのそれぞれの係合解放制御により、運転者のアクセル操作や車速V等に応じて、図3に示すように前進6段、後進1段の各ギヤ段(各変速段)が成立させられる。図3の「1st」〜「6th」は前進の第1速ギヤ段〜第6速ギヤ段を意味しており、「R」は後進ギヤ段であり、各ギヤ段に対応する自動変速機18の変速比γ(=入力回転速度Nin/出力回転速度Nout)は、第1遊星歯車装置60、第2遊星歯車装置64、および第3遊星歯車装置66の各ギヤ比(=サンギヤの歯数/リングギヤの歯数)ρ1、ρ2、ρ3によって適宜定められる。図3の作動表は、上記各ギヤ段とクラッチC1、C2、ブレーキB1〜B3の作動状態との関係をまとめたものであり、「○」は係合、「◎」はエンジンブレーキ時のみ係合、空欄は解放を表している。上記入力回転速度Ninは変速機入力軸70の回転速度であり、上記出力回転速度Noutは出力歯車72の回転速度である。
【0029】
図3は、自動変速機18において複数の変速段(ギヤ段)を成立させる際の係合要素の作動状態を説明する作動表である。自動変速機18は、第1変速部62および第2変速部68の各回転要素(サンギヤS1〜S3、キャリアCA1〜CA3、リングギヤR1〜R3)のうちのいずれかの連結状態の組み合わせに応じて第1速ギヤ段「1st」〜第6速ギヤ段「6th」の6つの前進変速段(前進ギヤ段)が成立させられるとともに、後進変速段「R」の後進変速段が成立させられる。図3に示すように、たとえば前進ギヤ段では、(1)第1速ギヤ段がクラッチC1及びブレーキB2の係合により成立させられ、(2)その第1速ギヤ段よりも変速比γが小さい第2速ギヤ段が第1クラッチC1及び第1ブレーキB1の係合により成立させられ、(3)その第2速ギヤ段よりも変速比γが小さい第3速ギヤ段が第1クラッチC1及び第3ブレーキB3の係合により成立させられ、(4)その第3速ギヤ段よりも変速比γが小さい第4速ギヤ段が第1クラッチC1及び第2クラッチC2の係合により成立させられ、(5)その第4速ギヤ段よりも変速比γが小さい第5速ギヤ段が第2クラッチC2及び第3ブレーキB3の係合により成立させられ、(6)その第5速ギヤ段よりも変速比γが小さい第6速ギヤ段が第2クラッチC2及び第1ブレーキB1の係合により成立させられるようになっている。また、第2ブレーキB2及び第3ブレーキB3の係合により後進ギヤ段が成立させられ、クラッチC1、C2、ブレーキB1〜B3のいずれも解放されることによりニュートラル状態「N」となるように基本的に構成されている。例えば、駆動装置8のシフトポジションPSHがNポジションまたはPポジションである場合には自動変速機18はニュートラル状態とされるので、クラッチC1、C2、ブレーキB1〜B3の全てが解放される。本実施例の自動変速機18では、所定のギヤ段を達成させるために2つの油圧式摩擦係合装置が係合させられるようになっており、その2つの油圧式摩擦係合装置の一方が解放されるとその所定のギヤ段が不成立とされ、自動変速機18内の動力伝達経路が解放されてニュートラル状態となる。
【0030】
また、第1速ギヤ段「1st」を成立させるブレーキB2には並列に一方向クラッチF1が設けられているため、発進時(加速時)には必ずしもブレーキB2を係合させる必要は無い。また、第1クラッチC1および第2クラッチC2は、図3に示されるように、前進ギヤ段のいずれにおいてもそれらのうちの一方或いは他方が必ず係合させられる。すなわち、上記第1クラッチC1または第2クラッチC2の係合が前進ギヤ段の達成要件とされており、したがって、本実施例においては、第1クラッチC1または第2クラッチC2がフォワードクラッチ(前進クラッチ)に相当する。
【0031】
図1において、油圧ポンプ16は、機械式のオイルポンプであり、クラッチやブレーキの油圧制御のための元圧を発生させると共に、潤滑油(作動油)を駆動装置8内のボールベアリング等の各潤滑部位に供給する。油圧ポンプ16は、トルクコンバータ14のポンプ翼車14aに連結されているので、例えばエンジン10と電動機MGとの何れか一方または両方によって回転駆動される。
【0032】
以上のように構成された駆動装置8では、例えば、エンジン10を走行用の駆動力源とするエンジン走行を行う場合には、エンジン断続用クラッチK0を係合させ、それによりエンジン10からの駆動力をポンプ翼車14aに伝達させる。また、電動機MGは電動機出力ギヤ56および電動機連結ギヤ58を介してポンプ翼車14aに連結されているので、上記エンジン走行においては、必要に応じて電動機MGにアシストトルクを出力させる。一方で、エンジン10を停止させ電動機MGを走行用の駆動力源とするEV走行(モータ走行)を行う場合には、エンジン断続用クラッチK0を解放させ、それによりエンジン10とトルクコンバータ14との間の動力伝達経路を遮断すると共に、電動機MGに走行用の駆動力を出力させる。
【0033】
また、走行中の車両6が一時的に停車する等の車両停止中では、例えば、エンジン断続用クラッチK0を解放させてエンジン10を停止させ、電動機MGに油圧ポンプ16を回転駆動させると共にクリープトルクを出力させる。このクリープトルクを出力させる際には、電動機MGからの駆動力はトルクコンバータ14を介して駆動輪28に伝達されることになるので、乗員の違和感を抑制するようにそのクリープトルクを出力させる制御が容易である。
【0034】
また、車両6の制動時には、例えば電動機MGに回生作動をさせて、車両制動力により電動機MGに発電させ、その発電した電力がインバータ48(図1参照)を介して蓄電装置46(図1参照)に充電される。
【0035】
また、エンジン10を始動させる際には、例えば、エンジン断続用クラッチK0をスリップ係合させて電動機トルクTmgによりエンジン10を回転させエンジン始動を行う。EV走行中にエンジン10を始動させる場合も同様であり、その場合には、車両走行のための出力にエンジン始動のための出力を上乗せした電動機出力Pmgを電動機MGに出力させる。そして、走行中のエンジン始動後は、基本的にはエンジン断続用クラッチK0を完全係合させ、前記エンジン走行に移行する。但し、上記走行中のエンジン始動後に後述のクラッチスリップ制御においてエンジン断続用クラッチK0のスリップ係合を継続させることがある。そのようにクラッチスリップ制御を実行した場合には、そのクラッチスリップ制御の終了後にエンジン断続用クラッチK0を完全係合させる。
【0036】
図4は、本実施例の駆動装置8を制御するための制御装置としての機能を有する電子制御装置110に入力される信号及びその電子制御装置110から出力される信号を例示している。この電子制御装置110は、CPU、ROM、RAM、及び入出力インターフェースなどから成る所謂マイクロコンピュータを含んで構成されており、RAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従って信号処理を行うことによりエンジン10、電動機MGに関するハイブリッド駆動制御等の車両制御を実行するものであり、エンジン10を始動する車両用エンジン始動制御装置としての機能も備えている。
【0037】
電子制御装置110には、図4に示すような各センサやスイッチなどから、エンジン10を冷却するエンジン冷却水の温度であるエンジン水温TEMPWを表すエンジン水温センサ112からの信号、駆動装置8のシフトポジションPSHを切り替えるために運転者によって操作されるシフトレバー114の操作位置を表すレバー操作位置センサ116からの信号、電動機MGの回転速度Nmg(以下、「電動機回転速度Nmg」という)を表す電動機回転速度センサ118からの信号、エンジン10の回転速度であるエンジン回転速度Neを表すエンジン回転速度センサ120からの信号、トルクコンバータ14のタービン翼車14bの回転速度であるタービン回転速度Ntを表すタービン回転速度センサ122からの信号、車速Vに対応する出力歯車72の回転速度Noutを表す車速センサ124からの信号、自動変速機18の作動油温TEMPATを表す作動油温センサ126からの信号、フットブレーキ操作を表す信号、運転者の出力要求量に対応するアクセル開度Accを表すアクセル開度センサ128からの信号、電動のスロットルアクチュエータ80により開閉作動させられる電動スロットル弁の開度θTH(以下、「スロットル弁開度θTH」という)を表すスロットル弁開度センサ130からの信号、蓄電装置46(図1参照)の充電残量(充電状態)SOCを表す信号等が、それぞれ供給される。なお、トルクコンバータ14のポンプ翼車14aの回転速度であるポンプ回転速度Npは電動機出力ギヤ56と電動機連結ギヤ58とのギヤ比を加味すれば電動機回転速度Nmgに基づいて算出できるので、電動機回転速度センサ118はポンプ回転速度センサとしても機能すると言える。
【0038】
また、電子制御装置110からは、エンジン出力Peを制御するエンジン出力制御装置への制御信号例えばエンジン10の吸気管に備えられた電動スロットル弁のスロットル弁開度θTHを操作するスロットルアクチュエータ80への駆動信号や燃料噴射装置76による吸気管への燃料供給量を制御する燃料供給量信号や点火装置78によるエンジン10の点火時期を指令する点火信号、電動機MGの作動を指令する指令信号、自動変速機18のクラッチC及びブレーキBの油圧アクチュエータを制御するために油圧制御回路132に含まれる電磁弁(ソレノイドバルブ)を作動させるバルブ指令信号等が、それぞれ出力される。なお、電子制御装置110は、例えばエンジン断続用クラッチK0が完全係合されたエンジン走行中には、アクセル開度Accに基づいてスロットルアクチュエータ80を駆動し、アクセル開度Accが増加するほどスロットル弁開度θTHを増加させるようにスロットル制御を実行する。このスロットル制御ではアクセル開度Accとスロットル弁開度θTHとは一対一の関係で対応する。
【0039】
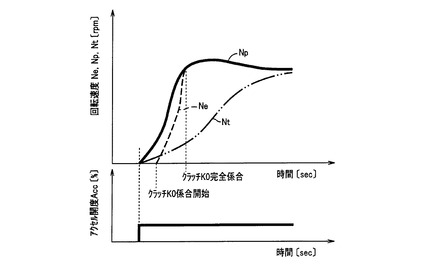
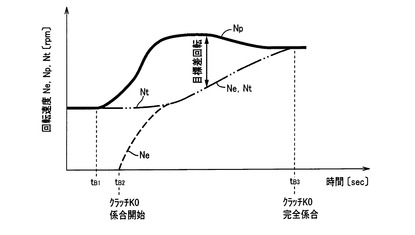
ところで、ロックアップクラッチ42が解放されたロックアップオフ状態において車両6を発進または加速させる際には、トルクコンバータ14の滑りが一時的に大きくなりポンプ回転速度Npが急速に上昇する。例えば、車両発進の際には図5のタイムチャートに示すように、車両6の加速操作すなわちアクセルペダル82の踏込操作に基づく電動機MGの駆動によりポンプ回転速度Npがタービン回転速度Ntよりも一時的に大きく高められ、それによってタービン回転速度Ntが所定回転速度に向けて迅速に引き上げられ、その後、ポンプ回転速度Npはタービン回転速度Ntがその所定回転速度に近付くに連れてタービン回転速度Ntに一致するように低下させられる。このとき、上記加速操作直後にエンジン断続用クラッチK0の係合作動が開始され、それによりモータトルクすなわち電動機トルクTmgでエンジン回転速度Neが引き上げられてエンジン断続用クラッチK0のスリップ係合中にエンジン始動がなされると共に、そのエンジン始動後にはトルクコンバータ14の滑りが大きい時にエンジン断続用クラッチK0が完全係合させられる。そのため、図5に示すように、エンジン回転速度Neはポンプ回転速度Npと同様に一時的に急速に上昇する。このようにエンジン回転速度Neが急速に上昇するとエンジン10の慣性モーメントとエンジン回転加速度とに基づく慣性トルク(イナーシャトルク)が一時的に大きくなり、この一時的に大きくなるエンジン10のイナーシャトルクに対抗するためにエンジン出力Peまたは電動機出力Pmgが消費されると車両の燃費悪化につながる可能性がある。また、エンジン回転速度Neが一時的に高回転化すること自体が燃費悪化につながる可能性がある。そこで、本実施例では、車両6を発進または加速させる際にエンジン10のイナーシャトルクの一時的な上昇すなわちエンジン回転速度Neの一時的な上昇を抑えるための制御、具体的には、エンジン回転速度Neをタービン回転速度Ntに追従させるように例えば一致させるようにエンジン断続用クラッチK0をスリップさせるクラッチスリップ制御がエンジン作動中に行われる。その制御機能の要部について図6を用いて以下に説明する。
【0040】
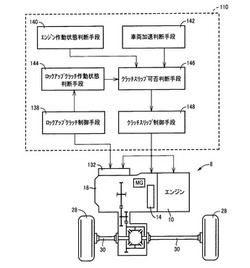
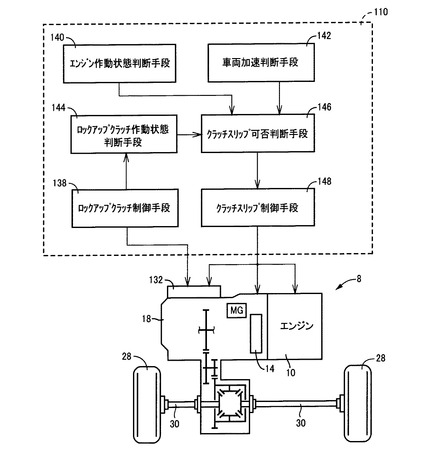
図6は、電子制御装置110に備えられた制御機能の要部を説明するための機能ブロック線図である。図6に示すように、電子制御装置110は、ロックアップクラッチ制御部としてのロックアップクラッチ制御手段138と、エンジン作動状態判断部としてのエンジン作動状態判断手段140と、車両加速判断部としての車両加速判断手段142と、ロックアップクラッチ作動状態判断部としてのロックアップクラッチ作動状態判断手段144と、クラッチスリップ可否判断部としてのクラッチスリップ可否判断手段146と、クラッチスリップ制御部としてのクラッチスリップ制御手段148とを備えている。
【0041】
ロックアップクラッチ制御手段138は、例えば車速V及びアクセル開度Accを変数として、ロックアップクラッチ42を解放状態すなわちロックアップオフとするロックアップクラッチ解放領域(ロックアップオフ領域)と、ロックアップクラッチ42をスリップ状態すなわちフレックス状態とするスリップ制御作動領域(フレックス制御作動領域)と、ロックアップクラッチ42を係合状態(厳密に言えば完全係合状態)すなわちロックアップオンとするロックアップ制御作動領域(ロックアップオン領域)との3つに領域分けされて予め定められた関係(マップ、ロックアップ領域線図)を記憶している。そして、ロックアップクラッチ制御手段138は、そのロックアップ領域線図から、実際の車速V及びアクセル開度Accで示される車両状態に基づいてロックアップクラッチ42の作動状態の切換えを制御する。例えば、ロックアップクラッチ制御手段138は、上記ロックアップ領域線図から実際の車両状態に基づいてロックアップクラッチ42のロックアップクラッチ解放領域、スリップ制御作動領域、ロックアップ制御作動領域の何れかであるかを判断し、ロックアップクラッチ42の解放への切換え或いはスリップ制御作動乃至ロックアップ制御作動への切換えの為のロックアップ制御指令信号を油圧制御回路132へ出力し、そのロックアップ制御指令信号に従ったロックアップクラッチ42の作動状態の切換えを油圧制御回路132に行わせる。また、ロックアップクラッチ制御手段138は、スリップ制御作動領域であると判断すると、ロックアップクラッチ42の実際のスリップ量NS(=Ne−Nt)を逐次算出し、その実際のスリップ量NSが所定の目標スリップ量NS*となるように油圧制御回路132によってロックアップクラッチ42の係合力を油圧制御する。例えば、比較的高車速領域であるロックアップオン領域においては、ロックアップクラッチ42をロックアップ(完全係合)してポンプ翼車14aとタービン翼車14bとを直結することで、トルクコンバータ14の滑り損失(内部損失)を無くして燃費を向上させている。また、比較的低中速領域であるスリップ制御作動領域においては、ポンプ翼車14aとタービン翼車14bとの間に所定の微少な滑りを与えて係合させるスリップ制御(フレックス制御)を実施することで、ロックアップクラッチ42が作動する領域を拡大し、トルクコンバータ14の伝達効率を向上して燃費を向上させている。なお、ロックアップクラッチ42が解放状態であるときに前記クラッチスリップ制御が実行されることがあるが、ロックアップクラッチ制御手段138は、ロックアップクラッチ42を完全係合(ロックアップオン)させる際にそのクラッチスリップ制御が実行中であれば、そのクラッチスリップ制御が終了しエンジン断続用クラッチK0が完全係合されるのを待って、そのエンジン断続用クラッチK0の完全係合後にロックアップクラッチ42を完全係合させる。エンジン断続用クラッチK0の耐久性確保のためである。
【0042】
エンジン作動状態判断手段140は、エンジン10が作動中であるか否かを判断する。エンジン10が作動中であるか否かは、例えば燃料噴射装置76または点火装置78の作動状況から判断できる。例えば、車両発進の際に停止していたエンジン10が始動されると共に車両6が加速させられる場合には、エンジン作動状態判断手段140は、そのエンジン10の始動後にエンジン10が作動中であると判断する。すなわち、そのエンジン10の始動時に、エンジン10が作動中であるとの判断を否定から肯定に切り替える。
【0043】
車両加速判断手段142は、車両6の発進または加速に際してアクセルペダル82が大きく踏み込まれたか否か、言い換えれば、運転者により車両6の加速操作がなされたか否かを判断する。確認的に述べるが、その加速操作には発進時の加速操作が含まれる。例えば、車両加速判断手段142はアクセル開度Accを逐次検出しており、予め定められたアクセル開度変化判断時間TIMEAC内でのアクセル開度Accの増大幅WAccが予め定められたアクセル開度増大幅判定値WAC1以上であるか否かを判断し、その増大幅WAccがアクセル開度増大幅判定値WAC1以上であればアクセルペダル82が大きく踏み込まれたと判断する。或いは、車両加速判断手段142は、アクセル開度Accの単位時間当たりの増大幅であるアクセル開度増大率RAccを逐次算出し、そのアクセル開度増大率RAccが予め定められたアクセル開度増大率判定値RAC1以上であるか否かを判断して、そのアクセル開度増大率RAccがアクセル開度増大率判定値RAC1以上であればアクセルペダル82が大きく踏み込まれたと判断しても差し支えない。例えば、アクセルペダル82があまり踏み込まれていなければ、エンジン断続用クラッチK0をスリップさせてエンジン回転速度Neの上昇を抑えたとしてもその抑制量が小さく燃費向上には殆ど貢献せず却ってエンジン断続用クラッチK0の消耗を助長するので、上記アクセル開度変化判断時間TIMEAC、アクセル開度増大幅判定値WAC1、及びアクセル開度増大率判定値RAC1は、アクセルペダル82の踏込操作により行われる車両発進または加速において燃費向上の観点から前記クラッチスリップ制御を実行すべきか否かの判断ができるように予め実験的に定められている。
【0044】
ロックアップクラッチ作動状態判断手段144は、ロックアップクラッチ42が解放状態であるか否かを判断する。例えば、ロックアップクラッチ作動状態判断手段144は、ロックアップクラッチ制御手段138が油圧制御回路132へ出力する前記ロックアップ制御指令信号に基づいてロックアップクラッチ42の作動状態を判断してもよいし、或いは、前記ロックアップ領域線図から、実際の車速V及びアクセル開度Accで示される車両状態に基づいてロックアップクラッチ42の作動状態を判断してもよい。
【0045】
クラッチスリップ可否判断手段146は、エンジン作動状態判断手段140によりエンジン10が作動中であると判断され、車両加速判断手段142によりアクセルペダル82が大きく踏み込まれたと判断され、且つ、ロックアップクラッチ作動状態判断手段144によりロックアップクラッチ42が解放状態であると判断された場合に、前記クラッチスリップ制御の実行開始に先立って、前記クラッチスリップ制御が開始されても良いか否かを判断する。具体的には、そのクラッチスリップ制御によって、運転者により要求される要求駆動トルク(ドライバ要求トルク)Toutdに対するトルク不足が生じないようにするため、電動機MGが、前記クラッチスリップ制御の開始時から要求駆動トルクToutdに対してトルク不足になるか否かを判断する。そして、トルク不足にならなければ前記クラッチスリップ制御が開始されても良いと判断する。ここで、電動機MGが要求駆動トルクToutdに対してトルク不足になることとは、具体的には下記式(1)が成立することである。そして、要求駆動トルクToutdは、例えば、下記式(1)では出力歯車72の軸心まわりのトルクであり、アクセル開度Accが大きいほど要求駆動トルクToutdが大きくなる予め実験的に定められた関係からアクセル開度Accに基づいて算出される。また、下記式(1)のTmgecは、電動機トルクTmgを出力歯車72の軸心まわりのトルクに換算した換算電動機トルクであり、具体的には、電動機出力ギヤ56と電動機連結ギヤ58とから構成されたギヤ対のギヤ比を加味して電動機トルクTmgを第1軸心RC1まわりのトルクとしたものに、トルクコンバータ14のトルク比RTTC(=出力トルク/入力トルク)と自動変速機18の変速比γとを乗じて得ることができる。更に、下記式(1)の換算電動機トルクTmgecは、前記クラッチスリップ制御中での電動機MGに対する回転負荷としてのエンジントルクTeが加味されたものであってもよい。
要求駆動トルクToutd > Tmgec ・・・(1)
【0046】
上述のように、上記式(1)が成立する電動機MGのトルク不足が生じる場合としては、例えば、蓄電装置46の充電残量SOCが少ないことによって電動機出力Pmgが所定の許容出力よりも更に低く制限される場合が考えられる。そこで、クラッチスリップ可否判断手段146は、電動機MGのトルク不足が生じるか否かを判断するための充電残量判定値LTSOCを予め設定された関係から前記要求駆動トルクToutdに基づいて決定し、蓄電装置46の充電残量SOCがその所定の充電残量判定値LTSOC未満であるか否かを判断する。そして、充電残量SOCが充電残量判定値LTSOC未満であれば、前記式(1)が成立する電動機MGのトルク不足が生じるものと判断する。上記充電残量判定値LTSOCは、前記クラッチスリップ制御を実行すれば充電残量SOCの不足に起因して要求駆動トルクToutdに対する電動機MGのトルク不足が生じるか否かを判断できるように、要求駆動トルクToutdと関連付けて予め実験的に設定されており、その実験的に設定された充電残量判定値LTSOCと要求駆動トルクToutdとの関係では、充電残量判定値LTSOCは要求駆動トルクToutdが大きいほど大きくなる。
【0047】
クラッチスリップ制御手段148は、前記クラッチスリップ制御が開始されても良いとクラッチスリップ可否判断手段146により判断された場合に、そのクラッチスリップ制御を実行する。そのクラッチスリップ制御が開始されても良いとクラッチスリップ可否判断手段146により判断されたということは、エンジン作動状態判断手段140によりエンジン10が作動中であると判断され、車両加速判断手段142によりアクセルペダル82が大きく踏み込まれたと判断され、且つ、ロックアップクラッチ作動状態判断手段144によりロックアップクラッチ42が解放状態であると判断されたと言うことを含んでいる。
【0048】
そして、クラッチスリップ制御手段148は、前記クラッチスリップ制御の実行中には、ポンプ回転速度Npとエンジン回転速度Neとを逐次検出し、そのポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)が所定の制御終了判定値LTEND以下になったか否かを逐次判断しており、その差回転(=Np−Ne)が制御終了判定値LTEND以下になった場合には、前記クラッチスリップ制御を終了すると共に、エンジン断続用クラッチK0を完全係合させる。上記制御終了判定値LTENDは、前記クラッチスリップ制御の終了時期を定めるための判定値であるが、図7等のタイムチャートに示すように、アクセルペダル82の踏込操作によってトルクコンバータ14の滑りが一時的に拡大した後、ポンプ回転速度Npはタービン回転速度Ntに収束していくと共に上記差回転(=Np−Ne)も縮小していくので、上記制御終了判定値LTENDは、前記クラッチスリップ制御の終了時に運転者にエンジン断続用クラッチK0の係合ショックを感じさせる等の違和感を与えることのないように、且つ、エンジン断続用クラッチK0のスリップを不必要に継続させてエンジン断続用クラッチK0を消耗させないように、実験的に予め定められている。
【0049】
また、クラッチスリップ制御手段148は、前記クラッチスリップ制御を実行すると共に、そのクラッチスリップ制御の実行中に用いられる高い燃費性能が得られるように予め実験的に定められた関係(クラッチスリップ制御時出力トルクマップ)から、アクセル開度Accに応じた要求駆動トルクToutdに基づいてその要求駆動トルクToutdが得られるようにエンジントルクTeの目標値(目標エンジントルクTe*)と電動機トルクTmgの目標値(目標電動機トルクTmg*)とをそれぞれ逐次決定し、エンジントルクTeをその目標エンジントルクTe*に一致させるように制御すると共に電動機トルクTmgをその目標電動機トルクTmg*に一致させるように制御する。要するに、クラッチスリップ制御手段148は、前記クラッチスリップ制御を実行すると共に、電動機MGによりトルクコンバータ14のポンプ翼車14aを回転駆動する。なお、そのクラッチスリップ制御中においてエンジン断続用クラッチK0がスリップしエンジン10は電動機MGに対して回転負荷として作用するので、目標エンジントルクTe*は負の値である。すなわち、クラッチスリップ制御中のエンジン10は、スロットル弁開度θTHに応じて定まる無負荷時のエンジン回転速度Neよりも高い回転速度で回転させられている。また、前記クラッチスリップ制御時出力トルクマップは、運転者に違和感を与えないようにするため、前記クラッチスリップ制御が実行されない場合すなわちエンジン断続用クラッチK0がスリップせず完全係合されているときと同一のトルクがトルクコンバータ14のポンプ翼車14aに逐次入力されるように定められるのが好ましい。
【0050】
クラッチスリップ制御手段148は、上述のようにエンジントルクTeと電動機トルクTmgとを制御すると共に、前記クラッチスリップ制御では、エンジン回転速度Neをタービン回転速度Ntに追従させるように例えば一致させるようにエンジン断続用クラッチK0をスリップさせる必要があるので、エンジン断続用クラッチK0のトルク容量に対応するそのエンジン断続用クラッチK0の係合圧PK0を逐次調節する。図7のタイムチャートを用いて前記クラッチスリップ制御におけるエンジン断続用クラッチK0の係合圧PK0の決定方法について説明する。そのエンジン断続用クラッチK0の係合圧PK0とは、エンジン断続用クラッチK0を係合作動させるためにエンジン断続用クラッチK0に供給される油圧である。
【0051】
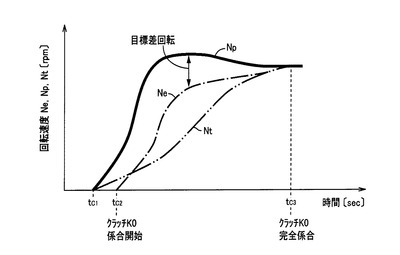
図7は、車両発進時のタイムチャートであって、アクセルペダル82の踏込操作に応じてエンジン始動される共に、そのエンジン始動後に前記クラッチスリップ制御が実行されたときの各回転速度Ne,Np,Ntのタイムチャートである。図7においてtA1時点はロックアップオフでの車両6の加速開始時点すなわち車両6の発進開始時点であり、tA2時点はエンジン断続用クラッチK0の係合開始時点であり、tA3時点は加速終了時点である。すなわち、tA1時点からtA3時点までの間でポンプ回転速度Npがタービン回転速度Ntよりも高められトルクコンバータ14の滑りによるトルク増幅がなされて車両6が加速している。そして、tA2時点後にエンジン10が始動され、tA3時点でエンジン断続用クラッチK0が完全係合とされている。従って、図7では、前記クラッチスリップ制御は、そのエンジン始動時からtA3時点までの間で実行されている。
【0052】
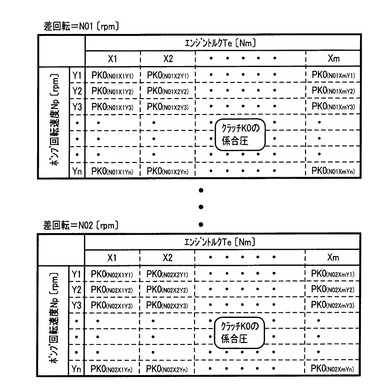
図7において前記クラッチスリップ制御でエンジン回転速度Neはタービン回転速度Ntに一致するように制御されているが、クラッチスリップ制御手段148は、そのようにエンジン回転速度Neを変化させるために、ポンプ回転速度Npとタービン回転速度Ntとを逐次検出し、そのポンプ回転速度Npとタービン回転速度Ntとの差である入出力回転速度差DNpt(=Np−Nt)を逐次算出し、その入出力回転速度差DNptをそのまま目標差回転DNTとして逐次設定する。そして、ポンプ回転速度NpとエンジントルクTeと目標差回転DNTとをパラメータとして予め実験的に定められた図8のような係合圧マップがクラッチスリップ制御手段148に記憶されており、クラッチスリップ制御手段148は、その係合圧マップから、ポンプ回転速度NpとエンジントルクTeと目標差回転DNTとに基づいてエンジン断続用クラッチK0の係合圧PK0を逐次決定する。そして、エンジン断続用クラッチK0に対しその決定した係合圧PK0を油圧制御回路132に逐次出力させる。図8の係合圧マップは、ポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)と、ポンプ回転速度Npと、エンジントルクTeと、目標差回転DNTと、エンジン断続用クラッチK0の係合圧PK0との関係を予め実験的に求めたマップであるので、クラッチスリップ制御手段148は、その係合圧マップ中の差回転を前記目標差回転DNTとすることによりエンジン断続用クラッチK0の係合圧PK0を決定する。図8の係合圧マップにおけるポンプ回転速度Npは電動機回転速度センサ118により検出される電動機回転速度Nmgから逐次算出されるものである。上記係合圧マップにおけるエンジントルクTeはセンサ等によって検出される実際値でもよいが、本実施例では予め実験的に設定された関係からスロットル弁開度θTH及びエンジン回転速度Neに基づいて逐次推定される。例えば、図8において目標差回転DNTがN02でありエンジントルクTeがX2でありポンプ回転速度NpがY3であれば、クラッチスリップ制御手段148は、エンジン断続用クラッチK0の係合圧PK0をPK0(N02X2Y3)に決定する。また、上記係合圧マップにおいて各パラメータが予め設定された設定値間の値である場合たとえばポンプ回転速度NpがY1とY2との間の値である場合には、エンジン断続用クラッチK0の係合圧PK0は、直線補完など一般的に知られた補完方法により補完されて決定される。このようにしてクラッチスリップ制御手段148は、前記クラッチスリップ制御におけるエンジン断続用クラッチK0の係合圧PK0を逐次決定する。なお、前記クラッチスリップ制御の実行中には、エンジン10はエンジン断続用クラッチK0のスリップにより電動機MGに対する回転負荷として作用するので、図8の係合圧マップを構成するエンジントルクTeは負の値である。
【0053】
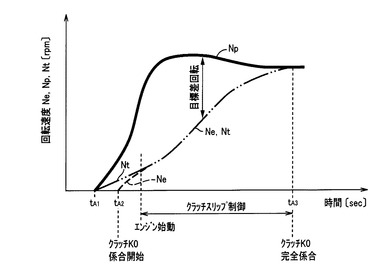
図9は、車両走行中における加速時のタイムチャートであって、図7と同様に、アクセルペダル82の踏込操作に応じてエンジン始動される共に、そのエンジン始動後に前記クラッチスリップ制御が実行されたときの各回転速度Ne,Np,Ntのタイムチャートである。図9は、車両発進時のタイムチャートである図7に対して、車両走行中における加速時のタイムチャートである点が異なっているが、それ以外は図7と同様である。従って、図9においてtB1時点はロックアップオフでの車両6の加速開始時点であり、tB2時点はエンジン断続用クラッチK0の係合開始時点であり、tB3時点は加速終了時点である。すなわち、tB1時点からtB3時点までの間でポンプ回転速度Npがタービン回転速度Ntよりも高められトルクコンバータ14の滑りによるトルク増幅がなされて車両6が加速している。そして、tB2時点後にエンジン10が始動され、tB3時点でエンジン断続用クラッチK0が完全係合とされているので、図9では、前記クラッチスリップ制御は、そのエンジン始動時からtB3時点までの間で実行されている。
【0054】
前述したように、クラッチスリップ制御手段148は、前記クラッチスリップ制御において、基本的には前記入出力回転速度差DNptをそのまま目標差回転DNTとして設定するが、そのまま目標差回転DNTとして設定するとエンジン断続用クラッチK0の耐久性が損なわれるおそれがある場合には、上記目標差回転DNTにガードをかける。言い換えれば、その目標差回転DNTを入出力回転速度差DNptよりも小さくなるように制限する。具体的には、クラッチスリップ制御手段148は、前記クラッチスリップ制御の実行中に、ポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)が予め定められた差回転上限値LTDFよりも大きい状態が、所定の判定時間TIMEDF以上継続したか否かを逐次判断することによって、エンジン断続用クラッチK0の耐久性が損なわれるおそれがあるか否かを判断する。そして、その差回転(=Np−Ne)が差回転上限値LTDFよりも大きい状態が前記判定時間TIMEDF以上継続したと判断した場合には、前記入出力回転速度差DNptをそのまま目標差回転DNTとして設定するのではなく、エンジン断続用クラッチK0の耐久性確保のために、目標差回転DNTを入出力回転速度差DNptよりも小さく設定する。例えば、零よりも大きく且つ1よりも小さい所定係数を入出力回転速度差DNptに乗じて得た値を目標差回転DNTとして設定してもよいし、入出力回転速度差DNptから正の値である所定値を差し引いて得た値を目標差回転DNTとして設定してもよい。クラッチスリップ制御手段148は、前記クラッチスリップ制御において、そのように目標差回転DNTを入出力回転速度差DNptよりも小さく設定することで、エンジン断続用クラッチK0をスリップさせつつエンジン回転速度Neをタービン回転速度Ntよりも高くする。前記差回転上限値LTDF及び前記判定時間TIMEDFは、エンジン断続用クラッチK0の耐久性を確保できるように実験的に予め定められており、その判定時間TIMEDFは、アクセルペダル82踏込時にトルクコンバータ14の滑りが一時的に拡大する期間が短時間であることを加味して、その判定時間TIMEDFについての判断後に前記目標差回転DNTのガードを実施できるように極短時間であり、且つ、エンジン断続用クラッチK0の耐久性に影響しない程度の瞬間的な上記差回転(=Np−Ne)の変化を判断対象から除けるように設定されている。
【0055】
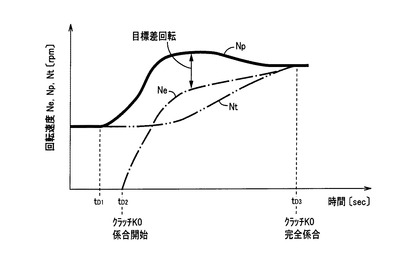
図10および図11は、何れも、前記クラッチスリップ制御において目標差回転DNTにガードがかけられた場合の各回転速度Ne,Np,Ntを示すタイムチャートである。図10は車両発進時のタイムチャートである一方で、図11は車両走行中における加速時のタイムチャートである。すなわち、図10は、目標差回転DNTにガードがかけられていること以外は図7と同様であり、図11は、目標差回転DNTにガードがかけられていること以外は図9と同様である。従って、図10および図11においてtC1時点とtD1時点とはロックアップオフでの車両6の加速開始時点であり、tC2時点とtD2時点とはエンジン断続用クラッチK0の係合開始時点であり、tC3時点とtD3時点とは加速終了時点である。すなわち、図10のtC1時点からtC3時点までの間、及び、図11のtD1時点からtD3時点までの間でそれぞれ、ポンプ回転速度Npがタービン回転速度Ntよりも高められトルクコンバータ14の滑りによるトルク増幅がなされて車両6が加速している。そして、図10ではtC2時点後にエンジン10が始動され、tC3時点でエンジン断続用クラッチK0が完全係合とされているので、前記クラッチスリップ制御は、そのエンジン始動時からtC3時点までの間で実行されている。また、図11ではtD2時点後にエンジン10が始動され、tD3時点でエンジン断続用クラッチK0が完全係合とされているので、前記クラッチスリップ制御は、そのエンジン始動時からtD3時点までの間で実行されている。図10及び図11では、前記クラッチスリップ制御の実行中に、目標差回転DNTが入出力回転速度差DNptよりも小さく設定されたため、エンジン回転速度Neはタービン回転速度Ntよりも高くなっている。
【0056】
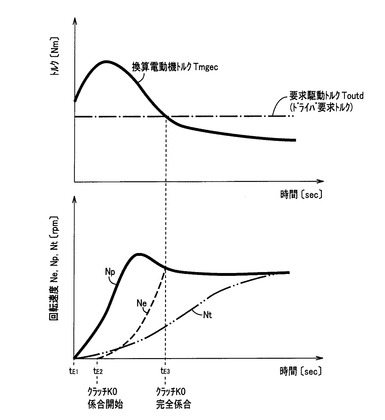
ところで、前述したように、クラッチスリップ可否判断手段146によって、前記クラッチスリップ制御の開始時から要求駆動トルクToutdに対してトルク不足になるか否かが判断されるが、前記クラッチスリップ制御の実行途中で電動機MGが要求駆動トルクToutdに対してトルク不足になることも考え得る。そこで、そのクラッチスリップ制御の実行途中でのトルク不足の発生を回避するため、クラッチスリップ制御手段148は、そのクラッチスリップ制御の実行中において、電動機MGが要求駆動トルクToutdに対してトルク不足になるか否かを判断する。このクラッチスリップ制御手段148の判断でも、前記クラッチスリップ可否判断手段146による判断と同様に、電動機MGが要求駆動トルクToutdに対してトルク不足になることとは、前記式(1)が成立することである。クラッチスリップ制御手段148は、上記トルク不足が生じる前にその判断をする必要があるので、クラッチスリップ可否判断手段146による判断と同様に、蓄電装置46の充電残量SOCを用いて、上記トルク不足が生じるか否かを判断する。すなわち、クラッチスリップ制御手段148は、前記クラッチスリップ制御の実行中において、前記充電残量判定値LTSOCを予め設定された関係から要求駆動トルクToutdに基づいて逐次決定し、蓄電装置46の充電残量SOCがその所定の充電残量判定値LTSOC未満であるか否かを逐次判断する。そして、充電残量SOCが充電残量判定値LTSOC未満であれば前記式(1)が成立する電動機MGのトルク不足が生じるものと判断する。クラッチスリップ制御手段148は、その電動機MGのトルク不足が生じるものと判断した場合には、図12のタイムチャートに示すように、前記クラッチスリップ制御を終了すると共に、エンジン回転速度Neをポンプ回転速度Npに近付けるように引き上げてエンジン断続用クラッチK0を完全係合させる。そして、エンジン断続用クラッチK0の完全係合後には、電動機MGおよびエンジン10からの動力によって要求駆動トルクToutdが達成される。
【0057】
図12は、前記クラッチスリップ制御の実行中に電動機MGが要求駆動トルクToutdに対してトルク不足になると判断された場合におけるエンジン断続用クラッチK0の係合タイミングとエンジン回転速度Neの変化とを説明するためのタイムチャートである。図12では、車両6の加速初期には電動機トルクTmgが要求駆動トルクToutdに対し十分に高められているが、その後、充電残量SOCの低下により電動機出力Pmgが制限されて、換算電動機トルクTmgecが要求駆動トルクToutdを下回るまでに低下している。図12のtE1時点は車両6の発進開始時点であり、tE2時点はエンジン断続用クラッチK0の係合開始時点であり、tE3時点はエンジン断続用クラッチK0の完全係合時点であり、クラッチスリップ制御手段148が電動機MGのトルク不足が生じるものとtE2時点からtE3時点までの間で判断している。図12のように、クラッチスリップ制御手段148は、その電動機MGのトルク不足が生じるものと判断した場合にエンジン断続用クラッチK0を完全係合させる際には、電動機MGの駆動電流に基づいて求まる電動機トルクTmgとポンプ回転速度Npとタービン回転速度Ntと自動変速機18の変速比γとを逐次検出すると共にそれらに基づき前記換算電動機トルクTmgecを逐次算出しつつ、エンジン回転速度Neをポンプ回転速度Npに近付けるように引き上げ、上記換算電動機トルクTmgecが要求駆動トルクToutdを下回る時までに、好ましくは換算電動機トルクTmgecが要求駆動トルクToutdを下回る時(瞬間)に同期して、エンジン断続用クラッチK0を完全係合させる。換算電動機トルクTmgecを逐次算出しておれば、その換算電動機トルクTmgecと要求駆動トルクToutdとの差の変化から、換算電動機トルクTmgecが要求駆動トルクToutdを下回る時を予測できる。
【0058】
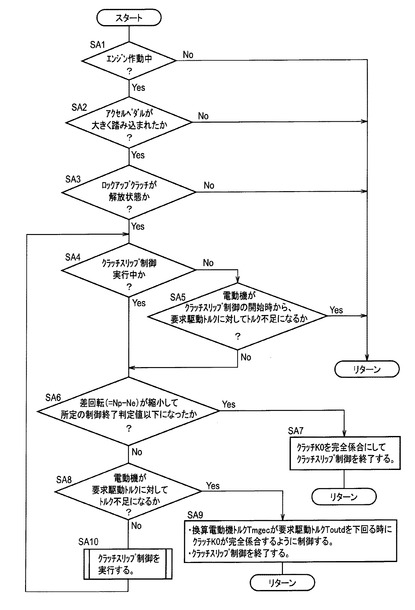
図13は、電子制御装置110の制御作動の要部、すなわち、前記クラッチスリップ制御を実行する制御作動を説明するためのフローチャートであり、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。この図13に示す制御作動は、単独で或いは他の制御作動と並列的に実行される。
【0059】
先ず、エンジン作動状態判断手段140に対応するステップ(以下、「ステップ」を省略する)SA1においては、エンジン10が作動中であるか否かが判断される。このSA1の判断が肯定された場合、すなわち、エンジン10が作動中である場合には、SA2に移る。一方、このSA1の判断が否定された場合には、本フローチャートは終了する。
【0060】
車両加速判断手段142に対応するSA2においては、アクセルペダル82が大きく踏み込まれたか否か、言い換えれば、運転者により車両6の加速操作がなされたか否かが判断される。このSA2の判断が肯定された場合、すなわち、アクセルペダル82が大きく踏み込まれた場合には、SA3に移る。一方、このSA2の判断が否定された場合には、本フローチャートは終了する。
【0061】
ロックアップクラッチ作動状態判断手段144に対応するSA3においては、ロックアップクラッチ42が解放状態であるか否かが判断される。このSA3の判断が肯定された場合、すなわち、ロックアップクラッチ42が解放状態である場合には、SA4に移る。一方、このSA3の判断が否定された場合には、本フローチャートは終了する。
【0062】
SA4においては、前記クラッチスリップ制御が実行中であるか否かが判断される。このSA4の判断が肯定された場合、すなわち、前記クラッチスリップ制御が実行中である場合には、SA6に移る。一方、このSA4の判断が否定された場合には、SA5に移る。
【0063】
SA5においては、電動機MGが前記クラッチスリップ制御の開始時から要求駆動トルクToutdに対してトルク不足になるか否かが判断される。具体的にこのSA5の判断は、蓄電装置46の充電残量SOCに基づいてなされる。このSA5の判断が肯定された場合、すなわち、電動機MGが前記クラッチスリップ制御の開始時から要求駆動トルクToutdに対してトルク不足になる場合には、本フローチャートは終了する。一方、このSA5の判断が否定された場合には、SA6に移る。なお、SA4およびSA5はクラッチスリップ可否判断手段146に対応する。
【0064】
SA6においては、ポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)が縮小して所定の制御終了判定値LTEND以下になったか否かが判断される。このSA6の判断が肯定された場合、すなわち、上記差回転(=Np−Ne)が縮小して所定の制御終了判定値LTEND以下になった場合には、SA7に移る。一方、このSA6の判断が否定された場合には、SA8に移る。
【0065】
SA7においては、前記クラッチスリップ制御が終了されると共に、エンジン断続用クラッチK0が完全係合される。
【0066】
SA8においては、電動機MGが要求駆動トルクToutdに対してトルク不足になるか否かが判断される。具体的にこのSA8の判断は、SA5と同様に蓄電装置46の充電残量SOCに基づいてなされる。このSA8の判断が肯定された場合、すなわち、電動機MGが要求駆動トルクToutdに対してトルク不足になる場合には、SA9に移る。一方、このSA8の判断が否定された場合には、SA10に移る。
【0067】
SA9においては、例えば図12のタイムチャートに示すように、エンジン回転速度Neがポンプ回転速度Npに近付くように引き上げられ、エンジン断続用クラッチK0が、換算電動機トルクTmgecが要求駆動トルクToutdを下回る時までに、好ましくは換算電動機トルクTmgecが要求駆動トルクToutdを下回る時(瞬間)に同期して完全係合するようにエンジン断続用クラッチK0の係合圧PK0が制御される。
【0068】
SA10においては、エンジントルクTe及び電動機トルクTmgの制御と共に前記クラッチスリップ制御が実行され、それらの制御が既に実行中であればそのまま継続される。具体的にSA10では、図14のサブルーチンが実行される。なお、SA6〜SA10はクラッチスリップ制御手段148に対応する。
【0069】
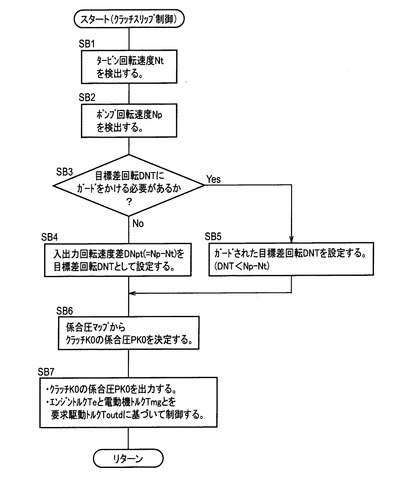
図14は、図13のSA10にて実行される制御作動を説明するためのフローチャートである。図14の全ステップはクラッチスリップ制御手段148に対応する。
【0070】
図14のSB1においてはタービン回転速度Ntが検出され、続くSB2においてはポンプ回転速度Npが検出される。SB2の次はSB3に移る。
【0071】
SB3においては、エンジン断続用クラッチK0の耐久性確保のために、前記目標差回転DNTにガードをかける必要があるか否かが判断される。具体的には、ポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)が前記差回転上限値LTDFよりも大きい状態が、前記所定の判定時間TIMEDF以上継続したか否かが判断され、その差回転(=Np−Ne)が差回転上限値LTDFよりも大きい状態が所定の判定時間TIMEDF以上継続した場合に、上記目標差回転DNTにガードをかける必要があると判断される。このSB3の判断が肯定された場合、すなわち、上記目標差回転DNTにガードをかける必要がある場合には、SB5に移る。一方、このSB3の判断が否定された場合には、SB4に移る。
【0072】
SB4においては、前記入出力回転速度差DNpt(=Np−Nt)が算出され、その入出力回転速度差DNptがそのまま目標差回転DNTとして設定される。SB4の次はSB6に移る。
【0073】
SB5においては、ガードされた目標差回転DNTが設定される。すなわち、前記入出力回転速度差DNptが算出され、目標差回転DNTがその入出力回転速度差DNptよりも小さく設定される。例えば、零よりも大きく且つ1よりも小さい所定係数をその入出力回転速度差DNptに乗じて得た値が目標差回転DNTとして設定されるとしてもよい。SB5の次はSB6に移る。
【0074】
SB6においては、エンジン断続用クラッチK0の係合圧PK0が、図8の係合圧マップから、ポンプ回転速度NpとエンジントルクTeと目標差回転DNTとに基づいて決定される。その係合圧マップでは、上記係合圧PK0は、係合圧マップ中の差回転に目標差回転DNTが代入されて決定される。SB6の次はSB7に移る。
【0075】
SB7においては、前記SB6で決定された係合圧PK0が油圧制御回路132からエンジン断続用クラッチK0に対して出力される。また、エンジントルクTeと電動機トルクTmgとが、要求駆動トルクToutdに基づいてその要求駆動トルクToutdが得られるように制御される。SB7の次は、図13のSA10に戻ってSA4に移る。
【0076】
本実施例によれば、クラッチスリップ制御手段148は、車両6の加速操作時には、電動機MGによりトルクコンバータ14のポンプ翼車14aを回転駆動し、それと共に、エンジン回転速度Neをタービン回転速度Ntに追従させるように例えば一致させるようにエンジン断続用クラッチK0をスリップさせる前記クラッチスリップ制御を実行する。従って、車両6の加速操作時にエンジン断続用クラッチK0をスリップしない係合状態(完全係合状態)にしてエンジン回転速度Neをトルクコンバータ14のポンプ翼車14aと同一の回転速度とする場合と比較して、車両加速中のエンジン10の回転加速度が低められエンジン10の慣性トルクが小さくなり、エンジン回転速度Neが低く推移するので、車両6の燃費悪化を抑制することができる。また、タービン回転速度Ntは車速Vに対応しており、前記クラッチスリップ制御ではエンジン回転速度Neはそのタービン回転速度Ntに一致するように制御されるので、エンジン回転速度Neは車速上昇に同調して上昇することになる。そのため、加速操作時にエンジン回転速度Neがタービン回転速度Ntと一致するように制御されない場合と比較して、運転者に与える違和感を低減できる。例えば、運転者によるアクセルペダル82踏込後の車速上昇が緩やかであるにも拘らずエンジン回転速度Neが急上昇すれば、車両6の加速がアクセルペダル82の踏込操作に対して遅れているような違和感を運転者に対して与えることがある。
【0077】
また、本実施例によれば、クラッチスリップ制御手段148は、前記クラッチスリップ制御の実行中に、ポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)が予め定められた差回転上限値LTDFよりも大きい状態が、所定の判定時間TIMEDF以上継続した場合には、目標差回転DNTを入出力回転速度差DNpt(=Np−Nt)よりも小さく設定する。これにより、エンジン断続用クラッチK0をスリップさせつつエンジン回転速度Neをタービン回転速度Ntよりも高くする。従って、エンジン断続用クラッチK0のスリップがある程度抑制されるので、エンジン断続用クラッチK0の耐久性を確保しつつ、前記クラッチスリップ制御を実行することが可能である。
【0078】
また、本実施例によれば、トルクコンバータ14は、そのトルクコンバータ14のポンプ翼車14aとタービン翼車14bとを直結可能なロックアップクラッチ42を備えており、前記クラッチスリップ制御は、そのロックアップクラッチ42が解放状態であるときに実行される。従って、図7等のタイムチャートに示すように、車両6の加速操作時においてポンプ回転速度Npはロックアップクラッチ42が解放状態であるときにタービン回転速度Ntよりも高くなり得るので、ロックアップクラッチ42の作動状態に応じた適切な時期に前記クラッチスリップ制御を実行することが可能である。
【0079】
また、本実施例によれば、クラッチスリップ可否判断手段146は、前記クラッチスリップ制御の実行開始に先立って、電動機MGが前記クラッチスリップ制御の開始時から要求駆動トルクToutdに対してトルク不足になるか否かを判断し、トルク不足にならなければ前記クラッチスリップ制御が開始されても良いと判断する。そして、クラッチスリップ制御手段148は、前記クラッチスリップ制御が開始されても良いとクラッチスリップ可否判断手段146により判断された場合に、そのクラッチスリップ制御を実行する。また、クラッチスリップ制御手段148は、上記クラッチスリップ制御の実行中において要求駆動トルクToutdに対する電動機MGのトルク不足が生じるものと判断した場合には、そのクラッチスリップ制御を終了する。要するに、クラッチスリップ制御手段148は、要求駆動トルクToutdに対して電動機MGがトルク不足にならないことを条件に、上記クラッチスリップ制御を実行する。従って、車両6の走行性能を損なわないように前記クラッチスリップ制御を実行することが可能である。
【0080】
以上、本発明の実施例を図面に基づいて詳細に説明したが、これはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【0081】
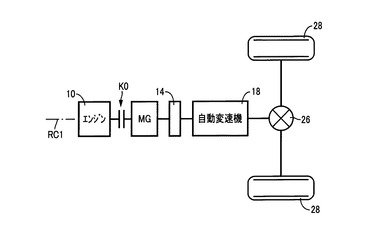
例えば、前述の実施例において、図1では電動機MGはエンジン10の回転軸心(第1軸心RC1)とは異なる第2軸心RC2上に配設されているが、図15に示すように、エンジン10、エンジン断続用クラッチK0、電動機MG、トルクコンバータ14、及び自動変速機18が、第1軸心RC1上に順次直列に連結され配設されていても差し支えない。図15のように電動機MGがエンジン10およびトルクコンバータ14等と直列に配設されれば、電動機回転速度Nmgはポンプ回転速度Npと等しくなる。
【0082】
また、前述の実施例において、図13のフローチャートにはSA1が設けられているが、SA1が無くそのフローチャートはSA2から開始されるものであっても差し支えない。
【0083】
また、前述の実施例において、図13のフローチャートのSA3の判断は、ロックアップクラッチ42が解放状態である場合に肯定されるが、ロックアップクラッチ42がスリップ状態である場合にも肯定されて差し支えない。
【0084】
また、前述の実施例において、図13のフローチャートにはSA4及びSA5が設けられているが、そのSA4及びSA5が無くそのフローチャートはSA3の判断が肯定された場合にSA6に移るものであっても差し支えない。
【0085】
また、前述の実施例において、図13のフローチャートにはSA8及びSA9が設けられているが、そのSA8及びSA9が無くそのフローチャートはSA6の判断が否定された場合にSA10に移るものであっても差し支えない。
【0086】
また、前述の実施例において、図14のフローチャートにはSB3及びSB5が設けられているが、そのSB3及びSB5が無くそのフローチャートはSB2の次にSB4に移るものであっても差し支えない。
【0087】
また、前述の実施例において、前記式(1)では要求駆動トルクToutdと換算電動機トルクTmgecとは、出力歯車72におけるトルクとして相互に比較されているが、両者が同一の箇所におけるトルクとして相互に比較されるのであれば、駆動車軸30など動力伝達経路の何れの箇所で相互に比較されてもよい。
【0088】
また、前述の実施例において、図8の係合圧マップにはパラメータとしてエンジントルクTeが採用されているが、スロットル弁開度θTHとエンジントルクTeとは相互に対応するので、そのエンジントルクTeに替えてスロットル弁開度θTHが上記係合圧マップにパラメータとして採用されていても差し支えない。
【0089】
また、前述の実施例において、クラッチスリップ可否判断手段146とクラッチスリップ制御手段148とは、電動機MGが要求駆動トルクToutdに対してトルク不足になるか否かを、蓄電装置46の充電残量SOCについて判断することで予測して判断しているが、その充電残量SOC以外の物理値を用いて上記トルク不足になるか否かを予測して判断しても差し支えない。例えば、電動機MGが高温状態になるとその電動機MGの発熱を抑えるため電動機トルクTmgが制限され、それにより上記トルク不足が生じる場合が考えられるので、クラッチスリップ可否判断手段146とクラッチスリップ制御手段148とは、電動機MGの温度(電動機温度)に基づいて、電動機MGが要求駆動トルクToutdに対してトルク不足になるか否かを判断しても差し支えない。
【0090】
また、前述の実施例において、駆動装置8は、FF型の車両6において横置きにされるものであるが、車両6はFR型であってもよいし、駆動装置8は縦置きにされてもよい。
【0091】
また、前述の実施例において、電動機MGは、電動機出力ギヤ56と電動機連結ギヤ58とによって構成された1対のギヤ対により、トルクコンバータ14のポンプ翼車14aに連結されているが、そのようなギヤ対に限らず、伝動ベルトやチェーンによってポンプ翼車14aに連結されていても差し支えない。
【0092】
また、前述の実施例において、ロックアップクラッチ42が設けられているが、ロックアップクラッチ42は必須ではない。
【0093】
また、前述の実施例の駆動装置8において、トルクコンバータ14が流体伝動装置として用いられているが、例えば、そのトルクコンバータ14は、トルク増幅作用のないフルードカップリング等の流体継手に置き換わっていても差し支えない。
【0094】
また、前述の実施例において、自動変速機18は有段の自動変速機であるが、無段階に変速比γを変更できるCVTであっても差し支えない。また、自動変速機18を備えない駆動装置8も考え得る。
【0095】
また、前述の実施例において、油圧ポンプ16は電動機MGによって回転駆動される機械式のオイルポンプであるが、電動オイルポンプであっても差し支えない。また、油圧ポンプ16が電動オイルポンプであれば、油圧ポンプ16は第1軸心RC1上とは別個に設けられても差し支えなく、電動機MGによって回転駆動される必要もない。
【符号の説明】
【0096】
6:車両
8:駆動装置(車両用駆動装置)
10:エンジン
14:トルクコンバータ(流体伝動装置)
14a:ポンプ翼車(入力側回転要素)
14b:タービン翼車(出力側回転要素)
28:駆動輪
42:ロックアップクラッチ
110:電子制御装置(制御装置)
MG:電動機
K0:エンジン断続用クラッチ
【技術分野】
【0001】
本発明は、エンジンと電動機とを備えた車両用駆動装置において燃費悪化を抑制する制御に関するものである。
【背景技術】
【0002】
エンジン断続用クラッチを介して駆動輪に連結されたエンジンと、そのエンジン断続用クラッチとその駆動輪との間の動力伝達経路に連結された電動機とを備えた車両用駆動装置の制御装置がよく知られている。例えば、特許文献1に記載された車両用駆動装置の制御装置がそれである。その特許文献1の車両用駆動装置では、エンジン側から駆動輪側に向けて、エンジン、エンジン断続用クラッチ、電動機、変速機、発進クラッチ、及び出力軸の順に直列に連結されている。この車両用駆動装置の制御装置は、電動機単独での走行であるEV走行ではエンジン断続用クラッチを解放しそれによりエンジンを駆動輪から切り離している。そして、上記制御装置は、そのEV走行中にエンジンを始動させる場合、上記発進クラッチをスリップ制御しながら電動機の回転速度を上昇させ、その電動機の回転速度が所定の回転速度に達したときに前記エンジン断続用クラッチを係合させエンジンと電動機とを連結する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−255285号公報
【特許文献2】特開平10−68335号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1の車両用駆動装置の制御装置は、エンジン単独またはエンジンおよび電動機での走行であるエンジン走行を行う場合、前記エンジン断続用クラッチを係合状態としてエンジンを駆動輪に連結する。また、上記特許文献1の車両用駆動装置は動力伝達経路にトルクコンバータなどの流体伝動装置を含んでいないが、その流体伝動装置がエンジン及び電動機で構成される駆動力源と駆動輪との間に介装されている車両用駆動装置も考え得る。例えば上記流体伝動装置が設けられていることで滑らかな車両発進を実現し易くなる。そのように流体伝動装置を含む車両用駆動装置では、エンジン走行においてアクセルペダルが大きく踏み込まれた場合などの車両加速時には、流体伝動装置の入力回転速度はその出力回転速度を迅速に引き上げるために出力回転速度よりも一時的に高められ、その一時的な上昇の後には出力回転速度に一致するように低下させられる。そうすると、上記エンジン走行中の車両加速時には、前記エンジン断続用クラッチが係合状態であるので、エンジン回転速度も流体伝動装置の入力回転速度と同一の回転速度で一時的に上昇することになり、そのエンジン回転速度の時間変化率(エンジン回転加速度)に応じた慣性トルク(イナーシャトルク)が発生する。更に、エンジンの慣性モーメントは例えば電動機等の他の回転要素と比較して大きく、その慣性モーメントが大きいほど上記慣性トルクも大きくなる。このように車両加速時にエンジンの慣性トルクが一時的に大きくなるとすれば、このエンジンの慣性トルクに対抗してエンジン出力または電動機出力が消費されるので、車両の燃費悪化につながる可能性があった。以上のような課題は未公知である。更に、エンジンの一般的な特性としてエンジン回転速度が高いほど燃費悪化につながり易い傾向がある。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、エンジン断続用クラッチを介してエンジンからの動力が入力される入力側回転要素と駆動輪へ動力を出力する出力側回転要素とを有する流体伝動装置と、前記入力側回転要素に連結された電動機とを備えた車両用駆動装置において、燃費悪化を抑制することができる車両用駆動装置の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
前記目的を達成するための本発明の要旨とするところは、(a)エンジン断続用クラッチを介してエンジンからの動力が入力される入力側回転要素と駆動輪へ動力を出力する出力側回転要素とを有する流体伝動装置と、前記入力側回転要素に連結された電動機とを備えた車両用駆動装置の制御装置であって、(b)車両の加速操作時には、前記電動機により前記入力側回転要素が回転駆動され、それと共に、前記エンジンの回転速度を前記出力側回転要素の回転速度に追従させるように前記エンジン断続用クラッチをスリップさせるクラッチスリップ制御を実行することにある。
【発明の効果】
【0007】
このようにすれば、車両の加速操作時に前記エンジン断続用クラッチをスリップしない係合状態(完全係合状態)にしてエンジン回転速度を前記入力側回転要素と同一の回転速度とする場合と比較して、車両加速中のエンジンの回転加速度が低められエンジンの慣性トルクが小さくなり、エンジン回転速度が低く推移するので、車両の燃費悪化を抑制することができる。また、前記流体伝動装置の出力側回転要素の回転速度は車速に対応しており、前記クラッチスリップ制御ではエンジン回転速度はその出力側回転要素の回転速度に一致するように制御されるので、エンジン回転速度は車速上昇に同調して上昇することになる。そのため、加速操作時にエンジン回転速度が上記出力側回転要素の回転速度と一致するように制御されない場合と比較して、運転者に与える違和感を低減できる。例えば、加速操作後の車速上昇が緩やかであるにも拘らずエンジン回転速度が急上昇すれば、車両の加速が上記加速操作に対して遅れているような違和感を運転者に対して与えることがある。なお、例えば燃費とは単位燃料消費量当たりの走行距離等であり、燃費の向上とはその単位燃料消費量当たりの走行距離が長くなることであり、或いは、車両全体としての燃料消費率(=燃料消費量/駆動輪出力)が小さくなることである。逆に、燃費の低下もしくは燃費の悪化とはその単位燃料消費量当たりの走行距離が短くなることであり、或いは、車両全体としての燃料消費率が大きくなることである。
【0008】
ここで、好適には、前記クラッチスリップ制御の実行中に、前記入力側回転要素の回転速度と前記エンジンの回転速度との差回転が予め定められた差回転上限値よりも大きい状態が、所定の判定時間以上継続した場合には、前記エンジン断続用クラッチをスリップさせつつ前記エンジンの回転速度を前記出力側回転要素の回転速度よりも高くする。このようにすれば、前記エンジン断続用クラッチのスリップがある程度抑制されるので、前記エンジン断続用クラッチの耐久性を確保しつつ、前記クラッチスリップ制御を実行することが可能である。
【0009】
また、好適には、(a)前記流体伝動装置は、その流体伝動装置の入力側回転要素と出力側回転要素とを直結可能なロックアップクラッチを備えており、(b)そのロックアップクラッチが解放状態であるときに前記クラッチスリップ制御を実行する。このようにすれば、車両の加速操作時において前記入力側回転要素の回転速度はロックアップクラッチが解放状態であるときに前記出力側回転要素の回転速度よりも高くなり得るので、ロックアップクラッチの作動状態に応じた適切な時期に前記クラッチスリップ制御を実行することが可能である。
【0010】
また、好適には、運転者により要求される要求駆動トルクに対して前記電動機がトルク不足にならないことを条件に、前記クラッチスリップ制御を実行する。このようにすれば、車両の走行性能を損なわないように前記クラッチスリップ制御を実行することが可能である。
【0011】
また、好適には、前記電動機は前記流体伝動装置の入力側回転要素に作動的に連結され、或いは、直接連結されている。
【0012】
また、好適には、前記車両用駆動装置は、前記流体伝動装置と前記駆動輪との間に介装された変速機を備えている。言い換えれば、前記流体伝動装置の出力側回転要素は上記変速機を介して上記駆動輪へ動力を出力する。
【0013】
また、好適には、前記エンジン、前記エンジン断続用クラッチ、前記電動機、前記流体伝動装置、及び前記変速機は、一軸心上に順次直列に連結されている。
【0014】
また、好適には、前記エンジン、前記流体伝動装置、前記変速機、及び前記電動機は、それらの軸心が、前記駆動輪に連結され且つその駆動輪を回転駆動する駆動車軸の軸方向と平行になるように配設されている。
【図面の簡単な説明】
【0015】
【図1】本発明が好適に適用される車両用駆動装置の構成を説明するための骨子図である。
【図2】図1の車両用駆動装置から駆動輪までの動力伝達経路を表した図である。
【図3】図1の車両用駆動装置が備える自動変速機において複数の変速段(ギヤ段)を成立させる際の係合要素の作動状態を説明する作動表である。
【図4】図1の車両用駆動装置に設けられた電子制御装置の入出力信号を説明する図である。
【図5】図1の車両用駆動装置に設けられたトルクコンバータのポンプ回転速度およびタービン回転速度とエンジン回転速度との車両発進時におけるタイムチャートである。
【図6】図4の電子制御装置に備えられた制御機能の要部を説明する機能ブロック線図である。
【図7】図1の車両用駆動装置における車両発進時のタイムチャートであって、アクセルペダルの踏込操作に応じてエンジン始動される共にそのエンジン始動後にクラッチスリップ制御が実行されたときのタイムチャートである。
【図8】図1の車両用駆動装置において実行されるクラッチスリップ制御でエンジン断続用クラッチの係合圧を決定するために用いられる係合圧マップの一例である。
【図9】図1の車両用駆動装置の車両走行中における加速時のタイムチャートであって、図7と同様に、アクセルペダルの踏込操作に応じてエンジン始動される共にそのエンジン始動後にクラッチスリップ制御が実行されたときのタイムチャートである。
【図10】図7のタイムチャートにおいて、クラッチスリップ制御で目標差回転にガードがかけられた場合のタイムチャートである。
【図11】図9のタイムチャートにおいて、クラッチスリップ制御で目標差回転にガードがかけられた場合のタイムチャートである。
【図12】図1の車両用駆動装置で、クラッチスリップ制御の実行中に電動機が要求駆動トルクに対してトルク不足になると判断された場合におけるエンジン断続用クラッチの係合タイミングとエンジン回転速度の変化とを説明するためのタイムチャートである。
【図13】図4の電子制御装置の制御作動の要部、すなわち、前記クラッチスリップ制御を実行する制御作動を説明するためのフローチャートである。
【図14】図13のSA10にて実行される制御作動を説明するためのフローチャートである。
【図15】図1の車両用駆動装置とは別の本発明が好適に適用される車両用駆動装置であって、エンジンとエンジン断続用クラッチと電動機とトルクコンバータと自動変速機とが一軸心上に順次直列に連結された車両用駆動装置を例示した概略図である。
【発明を実施するための形態】
【0016】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【実施例】
【0017】
図1は、本発明が好適に適用される車両用駆動装置8(以下、「駆動装置8」という)の構成を説明するための骨子図である。図2は、駆動装置8から駆動輪28までの動力伝達経路を表した図である。なお、自動変速機18及びトルクコンバータ14等は中心線(第1軸心RC1)に対して略対称的に構成されており、図1ではその中心線の下半分が省略されている。図1において第1軸心RC1はエンジン10およびトルクコンバータ14の回転軸心であり、第2軸心RC2は電動機MGの回転軸心である。
【0018】
図1に示すように、駆動装置8は、ガソリンエンジンやディーゼルエンジン等の内燃機関であるエンジン10と、車体にボルト止め等によって取り付けられる非回転部材としてのトランスアクスルケース(T/Aケース)12(以下、「ケース12」という)とを有し、そのケース12内において、エンジン10側から、エンジン断続用クラッチK0、トルクコンバータ14、油圧ポンプ16、及び自動変速機18を、第1軸心RC1上において順番にすなわち直列に備え、且つ、その第1軸心RC1と平行な第2軸心RC2まわりに回転駆動される電動機MGを備えている。更に、図2に示すように、駆動装置8は、ケース12内において、自動変速機18の出力回転部材である出力歯車72と噛み合うカウンタドリブンギヤ22、ファイナルギヤ対24、及び、そのファイナルギヤ対24を介してカウンタドリブンギヤ22に連結された差動歯車装置(ディファレンシャルギヤ)26を備えている。このように構成された駆動装置8は、例えば前輪駆動すなわちFF(フロントエンジン・フロントドライブ)型の車両6の前方に横置きされ、駆動輪28を駆動するために好適に用いられるものである。駆動装置8において、エンジン10の動力は、エンジン断続用クラッチK0が係合された場合に、エンジン10のクランク軸32すなわちエンジン出力軸32から、エンジン断続用クラッチK0、トルクコンバータ14、自動変速機18、カウンタドリブンギヤ22、ファイナルギヤ対24、差動歯車装置26、および1対の駆動車軸30等を順次介して1対の駆動輪28へ伝達される。
【0019】
トルクコンバータ14は、エンジン10と駆動輪28との間の動力伝達経路の一部を構成し、第1軸心RC1まわりに回転するように配設された流体伝動装置であり、ポンプ翼車14aとタービン翼車14bとステータ翼車14cとを備えている。そして、トルクコンバータ14は、ポンプ翼車14aに入力された駆動力を自動変速機18へ流体を介して伝達する。このトルクコンバータ14のポンプ翼車14aは、エンジン断続用クラッチK0を介してエンジン10のクランク軸32に連結されている。すなわち、ポンプ翼車14aは、エンジン10からの駆動力がエンジン断続用クラッチK0の係合または解放により選択的に入力され且つ第1軸心RC1まわりに回転可能な入力側回転要素である。タービン翼車14bはトルクコンバータ14の出力側回転要素であり、自動変速機18の入力軸である変速機入力軸70にスプライン嵌合等によって相対回転不能に連結されている。ステータ翼車14cは、ケース12に一方向クラッチ40を介して連結されている。すなわち、ステータ翼車14cは、一方向クラッチ40を介して非回転部材に連結されている。なお、入力ダンパ36がエンジン断続用クラッチK0とエンジン10のクランク軸32との間に介装されており、その入力ダンパ36は、エンジン断続用クラッチK0が係合された場合にポンプ翼車14aとエンジン10との間のトルクの脈動を吸収しつつトルク伝達を行う。
【0020】
また、トルクコンバータ14は、ロックアップクラッチ42とロックアップクラッチダンパ44とを備えている。そのロックアップクラッチ42は、ポンプ翼車14aとタービン翼車14bとの間に介装されポンプ翼車14aとタービン翼車14bと選択的に連結する直結クラッチであり、油圧制御等により係合状態(ロックアップオン状態)、スリップ状態(フレックス状態)、或いは解放状態(ロックアップオフ状態)とされるようになっている。ロックアップクラッチ42が係合状態とされることにより、厳密に言えば、完全係合状態とされることにより、上記ポンプ翼車14a及びタービン翼車14bが第1軸心RC1まわりに一体回転させられる。また、ロックアップクラッチダンパ44は、前述した入力ダンパ36と同様の機能を備え、ロックアップクラッチ42とタービン翼車14bとの間に介装されている。
【0021】
エンジン断続用クラッチK0は、エンジン10とトルクコンバータ14のポンプ翼車14aとの間の動力伝達を断続する動力断続装置として機能している。例えば、エンジン断続用クラッチK0は互いに重ねられた複数枚の摩擦板が油圧アクチュエータにより押圧される湿式多板型の油圧式摩擦係合装置であり、油圧ポンプ16が発生させる油圧を元圧とし駆動装置8が有する油圧制御回路132によって係合解放制御される。そして、その係合解放制御においてはエンジン断続用クラッチK0の動力伝達可能なトルク容量すなわちエンジン断続用クラッチK0の係合力が、上記油圧制御回路132内のリニヤソレノイドバルブ等の調圧により例えば連続的に変化させられる。エンジン断続用クラッチK0は、それの解放状態において第1軸心RC1まわりに相対回転可能な1対のクラッチ回転部材(クラッチハブ及びクラッチドラム)を備えており、そのクラッチ回転部材の一方(クラッチハブ)はエンジン10のクランク軸32に相対回転不能に連結されている一方で、そのクラッチ回転部材の他方(クラッチドラム)はトルクコンバータ14のポンプ翼車14aに相対回転不能に連結されている。このような構成から、エンジン断続用クラッチK0は、係合状態では、ポンプ翼車14aをエンジン10のクランク軸32と一体的に回転させる。すなわち、エンジン断続用クラッチK0の係合状態では、エンジン10からの駆動力がポンプ翼車14aに入力される。一方で、エンジン断続用クラッチK0は解放状態では、ポンプ翼車14aとエンジン10との間の動力伝達を遮断する。
【0022】
電動機MGは、第1軸心RC1と平行な第2軸心RC2を回転軸心として配設されており、駆動力を出力するモータ機能と共に蓄電装置46に充電する発電機能をも有する所謂モータジェネレータである。この電動機MGの出力軸である電動機出力軸52には電動機出力ギヤ56が相対回転不能に連結されており、その電動機出力ギヤ56は、トルクコンバータ14のポンプ翼車14aに相対回転不能に連結された電動機連結ギヤ58と相互に噛み合っている。すなわち、電動機MGは、電動機出力ギヤ56と電動機連結ギヤ58とから構成されたギヤ対を介して、上記ポンプ翼車14aに連結されると共にエンジン10にも連結されており、更に、トルクコンバータ14を介して変速機入力軸70に連結されている。
【0023】
また、電動機出力ギヤ56のピッチ円直径は電動機連結ギヤ58のピッチ円直径よりも小さい。すなわち、電動機出力ギヤ56の歯数は電動機連結ギヤ58の歯数よりも少ないので、電動機MGの回転は減速されてポンプ翼車14aに伝達される。言い換えれば、電動機MGの出力トルクTmg(以下、「電動機トルクTmg」という)は増幅されて電動機MGからポンプ翼車14aに伝達される。
【0024】
自動変速機18は、トルクコンバータ14から駆動輪28(図2参照)までの動力伝達経路の一部を構成し、エンジン10および電動機MGからの駆動力が入力される変速機である。そして、自動変速機18は、複数の油圧式摩擦係合装置(クラッチC、ブレーキB)具体的には5つの油圧式摩擦係合装置を備え、その複数の油圧式摩擦係合装置の何れかの掴み替えにより複数の変速段(ギヤ段)が選択的に成立させられる変速機である。端的に言えば、一般的な車両によく用いられる所謂クラッチツゥクラッチ変速を行う有段変速機である。図1に示すようにその自動変速機18は、シングルピニオン型の第1遊星歯車装置60を主体として構成されている第1変速部62と、ダブルピニオン型の第2遊星歯車装置64およびシングルピニオン型の第3遊星歯車装置66を主体としてラビニヨ型に構成されている第2変速部68とを同軸線上(第1軸心RC1上)に有し、変速機入力軸70の回転を変速して出力歯車72から出力する。その変速機入力軸70は自動変速機18の入力部材に相当するものであり、本実施例ではトルクコンバータ14のタービン翼車14bによって回転駆動されるタービン軸である。また、上記出力歯車72は自動変速機18の出力部材に相当するものであり、カウンタドリブンギヤ22(図2参照)と相互に噛み合いそのカウンタドリブンギヤ22と共に1対のギヤ対を構成している。また、図2に示すように、出力歯車72の回転は、カウンタドリブンギヤ22、ファイナルギヤ対24、差動歯車装置26、及び一対の駆動車軸30を順次介して一対の駆動輪(前輪)28へ伝達されるので、出力歯車72の回転速度である自動変速機18の出力回転速度Nout(rpm)が高いほど車速V(km/h)も高くなり、出力回転速度Noutは車速Vと一対一で対応する。
【0025】
上記第1変速部62を構成している第1遊星歯車装置60は、第1サンギヤS1と、第1ピニオンギヤP1と、その第1ピニオンギヤP1を自転および公転可能に支持する第1キャリヤCA1と、第1ピニオンギヤP1を介して第1サンギヤS1と噛み合う第1リングギヤR1とを備え、第1サンギヤS1、第1キャリアCA1、および第1リングギヤR1によって各々3つの回転要素が構成されている。第1遊星歯車装置60では、第1サンギヤS1が変速機入力軸70に連結されて回転駆動されるとともに、第1リングギヤR1が第3ブレーキB3を介して回転不能にケース12に固定されることにより、中間出力部材としての第1キャリアCA1が変速機入力軸70に対して減速回転させられる。
【0026】
前記第2変速部68を構成している第2遊星歯車装置64は、第2サンギヤS2と、互いに噛み合い1対を成す第2ピニオンギヤP2および第3ピニオンギヤP3と、そのピニオンギヤP2およびP3を自転および公転可能に支持する第2キャリヤCA2と、ピニオンギヤP2およびP3を介して第2サンギヤS2と噛み合う第2リングギヤR2とを備えている。また、第2変速部68を構成している第3遊星歯車装置66は、第3サンギヤS3と、第3ピニオンギヤP3と、その第3ピニオンギヤP3を自転および公転可能に支持する第3キャリヤCA3と、第3ピニオンギヤP3を介して第3サンギヤS3と噛み合う第3リングギヤR3とを備えている。そして、第2遊星歯車装置64および第3遊星歯車装置66では、一部が互いに連結されることによって4つの回転要素RM1〜RM4が構成されている。具体的には、第3遊星歯車装置66の第3サンギヤS3によって第1回転要素RM1が構成され、第2遊星歯車装置64の第2リングギヤR2および第3遊星歯車装置66の第3リングギヤR3が互いに連結されて第2回転要素RM2が構成され、第2遊星歯車装置64の第2キャリアCA2および第3遊星歯車装置66の第3キャリアCA3が互いに連結されて第3回転要素RM3が構成され、第2遊星歯車装置64の第2サンギヤS2によって第4回転要素RM4が構成されている。上記第2遊星歯車装置64および第3遊星歯車装置66は、第2、第3キャリアCA2およびCA3が共通の部材にて構成されているとともに、第2、第3リングギヤR2およびR3が共通の部材にて構成されており、且つ第3遊星歯車装置66の第3ピニオンギヤP3が第2遊星歯車装置64の一方のピニオンギヤを兼ねているラビニヨ型の遊星歯車列とされている。
【0027】
また、上記第1回転要素RM1(第3サンギヤS3)は第1クラッチC1を介して選択的に変速機入力軸70に連結される。第2回転要素RM2(リングギヤR2、R3)は第2クラッチC2を介して選択的に変速機入力軸70に連結されると共に、第2ブレーキB2によって選択的にケース12に連結されて回転停止させられる。第4回転要素RM4(第2サンギヤS2)は第1遊星歯車装置60の第1キャリアCA1に一体的に連結されており、第1ブレーキB1によって選択的にケース12に連結されて回転停止させられる。第3回転要素RM3(キャリアCA2、CA3)は出力歯車72に一体的に連結されて回転を出力するようになっている。なお、第2回転要素RM2とケース12との間には、第2回転要素RM2の正回転(変速機入力軸70と同じ回転方向)を許容しつつ逆回転を阻止する係合要素である一方向クラッチF1が第2ブレーキB2と並列に設けられている。
【0028】
上記クラッチC1、C2およびブレーキB1、B2、B3(以下、特に区別しない場合は単に「クラッチC」、「ブレーキB」という)は、湿式多板型のクラッチやブレーキなど油圧アクチュエータによって係合解放制御される油圧式摩擦係合装置(油圧式摩擦係合要素)であり、油圧ポンプ16が発生させる油圧を元圧とし駆動装置8が有する油圧制御回路132によってそれぞれ係合解放制御され、その油圧制御回路132内のリニヤソレノイドバルブ等の調圧によりクラッチCおよびブレーキBのそれぞれのトルク容量すなわち係合力が例えば連続的に変化させられる。そのクラッチCおよびブレーキBのそれぞれの係合解放制御により、運転者のアクセル操作や車速V等に応じて、図3に示すように前進6段、後進1段の各ギヤ段(各変速段)が成立させられる。図3の「1st」〜「6th」は前進の第1速ギヤ段〜第6速ギヤ段を意味しており、「R」は後進ギヤ段であり、各ギヤ段に対応する自動変速機18の変速比γ(=入力回転速度Nin/出力回転速度Nout)は、第1遊星歯車装置60、第2遊星歯車装置64、および第3遊星歯車装置66の各ギヤ比(=サンギヤの歯数/リングギヤの歯数)ρ1、ρ2、ρ3によって適宜定められる。図3の作動表は、上記各ギヤ段とクラッチC1、C2、ブレーキB1〜B3の作動状態との関係をまとめたものであり、「○」は係合、「◎」はエンジンブレーキ時のみ係合、空欄は解放を表している。上記入力回転速度Ninは変速機入力軸70の回転速度であり、上記出力回転速度Noutは出力歯車72の回転速度である。
【0029】
図3は、自動変速機18において複数の変速段(ギヤ段)を成立させる際の係合要素の作動状態を説明する作動表である。自動変速機18は、第1変速部62および第2変速部68の各回転要素(サンギヤS1〜S3、キャリアCA1〜CA3、リングギヤR1〜R3)のうちのいずれかの連結状態の組み合わせに応じて第1速ギヤ段「1st」〜第6速ギヤ段「6th」の6つの前進変速段(前進ギヤ段)が成立させられるとともに、後進変速段「R」の後進変速段が成立させられる。図3に示すように、たとえば前進ギヤ段では、(1)第1速ギヤ段がクラッチC1及びブレーキB2の係合により成立させられ、(2)その第1速ギヤ段よりも変速比γが小さい第2速ギヤ段が第1クラッチC1及び第1ブレーキB1の係合により成立させられ、(3)その第2速ギヤ段よりも変速比γが小さい第3速ギヤ段が第1クラッチC1及び第3ブレーキB3の係合により成立させられ、(4)その第3速ギヤ段よりも変速比γが小さい第4速ギヤ段が第1クラッチC1及び第2クラッチC2の係合により成立させられ、(5)その第4速ギヤ段よりも変速比γが小さい第5速ギヤ段が第2クラッチC2及び第3ブレーキB3の係合により成立させられ、(6)その第5速ギヤ段よりも変速比γが小さい第6速ギヤ段が第2クラッチC2及び第1ブレーキB1の係合により成立させられるようになっている。また、第2ブレーキB2及び第3ブレーキB3の係合により後進ギヤ段が成立させられ、クラッチC1、C2、ブレーキB1〜B3のいずれも解放されることによりニュートラル状態「N」となるように基本的に構成されている。例えば、駆動装置8のシフトポジションPSHがNポジションまたはPポジションである場合には自動変速機18はニュートラル状態とされるので、クラッチC1、C2、ブレーキB1〜B3の全てが解放される。本実施例の自動変速機18では、所定のギヤ段を達成させるために2つの油圧式摩擦係合装置が係合させられるようになっており、その2つの油圧式摩擦係合装置の一方が解放されるとその所定のギヤ段が不成立とされ、自動変速機18内の動力伝達経路が解放されてニュートラル状態となる。
【0030】
また、第1速ギヤ段「1st」を成立させるブレーキB2には並列に一方向クラッチF1が設けられているため、発進時(加速時)には必ずしもブレーキB2を係合させる必要は無い。また、第1クラッチC1および第2クラッチC2は、図3に示されるように、前進ギヤ段のいずれにおいてもそれらのうちの一方或いは他方が必ず係合させられる。すなわち、上記第1クラッチC1または第2クラッチC2の係合が前進ギヤ段の達成要件とされており、したがって、本実施例においては、第1クラッチC1または第2クラッチC2がフォワードクラッチ(前進クラッチ)に相当する。
【0031】
図1において、油圧ポンプ16は、機械式のオイルポンプであり、クラッチやブレーキの油圧制御のための元圧を発生させると共に、潤滑油(作動油)を駆動装置8内のボールベアリング等の各潤滑部位に供給する。油圧ポンプ16は、トルクコンバータ14のポンプ翼車14aに連結されているので、例えばエンジン10と電動機MGとの何れか一方または両方によって回転駆動される。
【0032】
以上のように構成された駆動装置8では、例えば、エンジン10を走行用の駆動力源とするエンジン走行を行う場合には、エンジン断続用クラッチK0を係合させ、それによりエンジン10からの駆動力をポンプ翼車14aに伝達させる。また、電動機MGは電動機出力ギヤ56および電動機連結ギヤ58を介してポンプ翼車14aに連結されているので、上記エンジン走行においては、必要に応じて電動機MGにアシストトルクを出力させる。一方で、エンジン10を停止させ電動機MGを走行用の駆動力源とするEV走行(モータ走行)を行う場合には、エンジン断続用クラッチK0を解放させ、それによりエンジン10とトルクコンバータ14との間の動力伝達経路を遮断すると共に、電動機MGに走行用の駆動力を出力させる。
【0033】
また、走行中の車両6が一時的に停車する等の車両停止中では、例えば、エンジン断続用クラッチK0を解放させてエンジン10を停止させ、電動機MGに油圧ポンプ16を回転駆動させると共にクリープトルクを出力させる。このクリープトルクを出力させる際には、電動機MGからの駆動力はトルクコンバータ14を介して駆動輪28に伝達されることになるので、乗員の違和感を抑制するようにそのクリープトルクを出力させる制御が容易である。
【0034】
また、車両6の制動時には、例えば電動機MGに回生作動をさせて、車両制動力により電動機MGに発電させ、その発電した電力がインバータ48(図1参照)を介して蓄電装置46(図1参照)に充電される。
【0035】
また、エンジン10を始動させる際には、例えば、エンジン断続用クラッチK0をスリップ係合させて電動機トルクTmgによりエンジン10を回転させエンジン始動を行う。EV走行中にエンジン10を始動させる場合も同様であり、その場合には、車両走行のための出力にエンジン始動のための出力を上乗せした電動機出力Pmgを電動機MGに出力させる。そして、走行中のエンジン始動後は、基本的にはエンジン断続用クラッチK0を完全係合させ、前記エンジン走行に移行する。但し、上記走行中のエンジン始動後に後述のクラッチスリップ制御においてエンジン断続用クラッチK0のスリップ係合を継続させることがある。そのようにクラッチスリップ制御を実行した場合には、そのクラッチスリップ制御の終了後にエンジン断続用クラッチK0を完全係合させる。
【0036】
図4は、本実施例の駆動装置8を制御するための制御装置としての機能を有する電子制御装置110に入力される信号及びその電子制御装置110から出力される信号を例示している。この電子制御装置110は、CPU、ROM、RAM、及び入出力インターフェースなどから成る所謂マイクロコンピュータを含んで構成されており、RAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従って信号処理を行うことによりエンジン10、電動機MGに関するハイブリッド駆動制御等の車両制御を実行するものであり、エンジン10を始動する車両用エンジン始動制御装置としての機能も備えている。
【0037】
電子制御装置110には、図4に示すような各センサやスイッチなどから、エンジン10を冷却するエンジン冷却水の温度であるエンジン水温TEMPWを表すエンジン水温センサ112からの信号、駆動装置8のシフトポジションPSHを切り替えるために運転者によって操作されるシフトレバー114の操作位置を表すレバー操作位置センサ116からの信号、電動機MGの回転速度Nmg(以下、「電動機回転速度Nmg」という)を表す電動機回転速度センサ118からの信号、エンジン10の回転速度であるエンジン回転速度Neを表すエンジン回転速度センサ120からの信号、トルクコンバータ14のタービン翼車14bの回転速度であるタービン回転速度Ntを表すタービン回転速度センサ122からの信号、車速Vに対応する出力歯車72の回転速度Noutを表す車速センサ124からの信号、自動変速機18の作動油温TEMPATを表す作動油温センサ126からの信号、フットブレーキ操作を表す信号、運転者の出力要求量に対応するアクセル開度Accを表すアクセル開度センサ128からの信号、電動のスロットルアクチュエータ80により開閉作動させられる電動スロットル弁の開度θTH(以下、「スロットル弁開度θTH」という)を表すスロットル弁開度センサ130からの信号、蓄電装置46(図1参照)の充電残量(充電状態)SOCを表す信号等が、それぞれ供給される。なお、トルクコンバータ14のポンプ翼車14aの回転速度であるポンプ回転速度Npは電動機出力ギヤ56と電動機連結ギヤ58とのギヤ比を加味すれば電動機回転速度Nmgに基づいて算出できるので、電動機回転速度センサ118はポンプ回転速度センサとしても機能すると言える。
【0038】
また、電子制御装置110からは、エンジン出力Peを制御するエンジン出力制御装置への制御信号例えばエンジン10の吸気管に備えられた電動スロットル弁のスロットル弁開度θTHを操作するスロットルアクチュエータ80への駆動信号や燃料噴射装置76による吸気管への燃料供給量を制御する燃料供給量信号や点火装置78によるエンジン10の点火時期を指令する点火信号、電動機MGの作動を指令する指令信号、自動変速機18のクラッチC及びブレーキBの油圧アクチュエータを制御するために油圧制御回路132に含まれる電磁弁(ソレノイドバルブ)を作動させるバルブ指令信号等が、それぞれ出力される。なお、電子制御装置110は、例えばエンジン断続用クラッチK0が完全係合されたエンジン走行中には、アクセル開度Accに基づいてスロットルアクチュエータ80を駆動し、アクセル開度Accが増加するほどスロットル弁開度θTHを増加させるようにスロットル制御を実行する。このスロットル制御ではアクセル開度Accとスロットル弁開度θTHとは一対一の関係で対応する。
【0039】
ところで、ロックアップクラッチ42が解放されたロックアップオフ状態において車両6を発進または加速させる際には、トルクコンバータ14の滑りが一時的に大きくなりポンプ回転速度Npが急速に上昇する。例えば、車両発進の際には図5のタイムチャートに示すように、車両6の加速操作すなわちアクセルペダル82の踏込操作に基づく電動機MGの駆動によりポンプ回転速度Npがタービン回転速度Ntよりも一時的に大きく高められ、それによってタービン回転速度Ntが所定回転速度に向けて迅速に引き上げられ、その後、ポンプ回転速度Npはタービン回転速度Ntがその所定回転速度に近付くに連れてタービン回転速度Ntに一致するように低下させられる。このとき、上記加速操作直後にエンジン断続用クラッチK0の係合作動が開始され、それによりモータトルクすなわち電動機トルクTmgでエンジン回転速度Neが引き上げられてエンジン断続用クラッチK0のスリップ係合中にエンジン始動がなされると共に、そのエンジン始動後にはトルクコンバータ14の滑りが大きい時にエンジン断続用クラッチK0が完全係合させられる。そのため、図5に示すように、エンジン回転速度Neはポンプ回転速度Npと同様に一時的に急速に上昇する。このようにエンジン回転速度Neが急速に上昇するとエンジン10の慣性モーメントとエンジン回転加速度とに基づく慣性トルク(イナーシャトルク)が一時的に大きくなり、この一時的に大きくなるエンジン10のイナーシャトルクに対抗するためにエンジン出力Peまたは電動機出力Pmgが消費されると車両の燃費悪化につながる可能性がある。また、エンジン回転速度Neが一時的に高回転化すること自体が燃費悪化につながる可能性がある。そこで、本実施例では、車両6を発進または加速させる際にエンジン10のイナーシャトルクの一時的な上昇すなわちエンジン回転速度Neの一時的な上昇を抑えるための制御、具体的には、エンジン回転速度Neをタービン回転速度Ntに追従させるように例えば一致させるようにエンジン断続用クラッチK0をスリップさせるクラッチスリップ制御がエンジン作動中に行われる。その制御機能の要部について図6を用いて以下に説明する。
【0040】
図6は、電子制御装置110に備えられた制御機能の要部を説明するための機能ブロック線図である。図6に示すように、電子制御装置110は、ロックアップクラッチ制御部としてのロックアップクラッチ制御手段138と、エンジン作動状態判断部としてのエンジン作動状態判断手段140と、車両加速判断部としての車両加速判断手段142と、ロックアップクラッチ作動状態判断部としてのロックアップクラッチ作動状態判断手段144と、クラッチスリップ可否判断部としてのクラッチスリップ可否判断手段146と、クラッチスリップ制御部としてのクラッチスリップ制御手段148とを備えている。
【0041】
ロックアップクラッチ制御手段138は、例えば車速V及びアクセル開度Accを変数として、ロックアップクラッチ42を解放状態すなわちロックアップオフとするロックアップクラッチ解放領域(ロックアップオフ領域)と、ロックアップクラッチ42をスリップ状態すなわちフレックス状態とするスリップ制御作動領域(フレックス制御作動領域)と、ロックアップクラッチ42を係合状態(厳密に言えば完全係合状態)すなわちロックアップオンとするロックアップ制御作動領域(ロックアップオン領域)との3つに領域分けされて予め定められた関係(マップ、ロックアップ領域線図)を記憶している。そして、ロックアップクラッチ制御手段138は、そのロックアップ領域線図から、実際の車速V及びアクセル開度Accで示される車両状態に基づいてロックアップクラッチ42の作動状態の切換えを制御する。例えば、ロックアップクラッチ制御手段138は、上記ロックアップ領域線図から実際の車両状態に基づいてロックアップクラッチ42のロックアップクラッチ解放領域、スリップ制御作動領域、ロックアップ制御作動領域の何れかであるかを判断し、ロックアップクラッチ42の解放への切換え或いはスリップ制御作動乃至ロックアップ制御作動への切換えの為のロックアップ制御指令信号を油圧制御回路132へ出力し、そのロックアップ制御指令信号に従ったロックアップクラッチ42の作動状態の切換えを油圧制御回路132に行わせる。また、ロックアップクラッチ制御手段138は、スリップ制御作動領域であると判断すると、ロックアップクラッチ42の実際のスリップ量NS(=Ne−Nt)を逐次算出し、その実際のスリップ量NSが所定の目標スリップ量NS*となるように油圧制御回路132によってロックアップクラッチ42の係合力を油圧制御する。例えば、比較的高車速領域であるロックアップオン領域においては、ロックアップクラッチ42をロックアップ(完全係合)してポンプ翼車14aとタービン翼車14bとを直結することで、トルクコンバータ14の滑り損失(内部損失)を無くして燃費を向上させている。また、比較的低中速領域であるスリップ制御作動領域においては、ポンプ翼車14aとタービン翼車14bとの間に所定の微少な滑りを与えて係合させるスリップ制御(フレックス制御)を実施することで、ロックアップクラッチ42が作動する領域を拡大し、トルクコンバータ14の伝達効率を向上して燃費を向上させている。なお、ロックアップクラッチ42が解放状態であるときに前記クラッチスリップ制御が実行されることがあるが、ロックアップクラッチ制御手段138は、ロックアップクラッチ42を完全係合(ロックアップオン)させる際にそのクラッチスリップ制御が実行中であれば、そのクラッチスリップ制御が終了しエンジン断続用クラッチK0が完全係合されるのを待って、そのエンジン断続用クラッチK0の完全係合後にロックアップクラッチ42を完全係合させる。エンジン断続用クラッチK0の耐久性確保のためである。
【0042】
エンジン作動状態判断手段140は、エンジン10が作動中であるか否かを判断する。エンジン10が作動中であるか否かは、例えば燃料噴射装置76または点火装置78の作動状況から判断できる。例えば、車両発進の際に停止していたエンジン10が始動されると共に車両6が加速させられる場合には、エンジン作動状態判断手段140は、そのエンジン10の始動後にエンジン10が作動中であると判断する。すなわち、そのエンジン10の始動時に、エンジン10が作動中であるとの判断を否定から肯定に切り替える。
【0043】
車両加速判断手段142は、車両6の発進または加速に際してアクセルペダル82が大きく踏み込まれたか否か、言い換えれば、運転者により車両6の加速操作がなされたか否かを判断する。確認的に述べるが、その加速操作には発進時の加速操作が含まれる。例えば、車両加速判断手段142はアクセル開度Accを逐次検出しており、予め定められたアクセル開度変化判断時間TIMEAC内でのアクセル開度Accの増大幅WAccが予め定められたアクセル開度増大幅判定値WAC1以上であるか否かを判断し、その増大幅WAccがアクセル開度増大幅判定値WAC1以上であればアクセルペダル82が大きく踏み込まれたと判断する。或いは、車両加速判断手段142は、アクセル開度Accの単位時間当たりの増大幅であるアクセル開度増大率RAccを逐次算出し、そのアクセル開度増大率RAccが予め定められたアクセル開度増大率判定値RAC1以上であるか否かを判断して、そのアクセル開度増大率RAccがアクセル開度増大率判定値RAC1以上であればアクセルペダル82が大きく踏み込まれたと判断しても差し支えない。例えば、アクセルペダル82があまり踏み込まれていなければ、エンジン断続用クラッチK0をスリップさせてエンジン回転速度Neの上昇を抑えたとしてもその抑制量が小さく燃費向上には殆ど貢献せず却ってエンジン断続用クラッチK0の消耗を助長するので、上記アクセル開度変化判断時間TIMEAC、アクセル開度増大幅判定値WAC1、及びアクセル開度増大率判定値RAC1は、アクセルペダル82の踏込操作により行われる車両発進または加速において燃費向上の観点から前記クラッチスリップ制御を実行すべきか否かの判断ができるように予め実験的に定められている。
【0044】
ロックアップクラッチ作動状態判断手段144は、ロックアップクラッチ42が解放状態であるか否かを判断する。例えば、ロックアップクラッチ作動状態判断手段144は、ロックアップクラッチ制御手段138が油圧制御回路132へ出力する前記ロックアップ制御指令信号に基づいてロックアップクラッチ42の作動状態を判断してもよいし、或いは、前記ロックアップ領域線図から、実際の車速V及びアクセル開度Accで示される車両状態に基づいてロックアップクラッチ42の作動状態を判断してもよい。
【0045】
クラッチスリップ可否判断手段146は、エンジン作動状態判断手段140によりエンジン10が作動中であると判断され、車両加速判断手段142によりアクセルペダル82が大きく踏み込まれたと判断され、且つ、ロックアップクラッチ作動状態判断手段144によりロックアップクラッチ42が解放状態であると判断された場合に、前記クラッチスリップ制御の実行開始に先立って、前記クラッチスリップ制御が開始されても良いか否かを判断する。具体的には、そのクラッチスリップ制御によって、運転者により要求される要求駆動トルク(ドライバ要求トルク)Toutdに対するトルク不足が生じないようにするため、電動機MGが、前記クラッチスリップ制御の開始時から要求駆動トルクToutdに対してトルク不足になるか否かを判断する。そして、トルク不足にならなければ前記クラッチスリップ制御が開始されても良いと判断する。ここで、電動機MGが要求駆動トルクToutdに対してトルク不足になることとは、具体的には下記式(1)が成立することである。そして、要求駆動トルクToutdは、例えば、下記式(1)では出力歯車72の軸心まわりのトルクであり、アクセル開度Accが大きいほど要求駆動トルクToutdが大きくなる予め実験的に定められた関係からアクセル開度Accに基づいて算出される。また、下記式(1)のTmgecは、電動機トルクTmgを出力歯車72の軸心まわりのトルクに換算した換算電動機トルクであり、具体的には、電動機出力ギヤ56と電動機連結ギヤ58とから構成されたギヤ対のギヤ比を加味して電動機トルクTmgを第1軸心RC1まわりのトルクとしたものに、トルクコンバータ14のトルク比RTTC(=出力トルク/入力トルク)と自動変速機18の変速比γとを乗じて得ることができる。更に、下記式(1)の換算電動機トルクTmgecは、前記クラッチスリップ制御中での電動機MGに対する回転負荷としてのエンジントルクTeが加味されたものであってもよい。
要求駆動トルクToutd > Tmgec ・・・(1)
【0046】
上述のように、上記式(1)が成立する電動機MGのトルク不足が生じる場合としては、例えば、蓄電装置46の充電残量SOCが少ないことによって電動機出力Pmgが所定の許容出力よりも更に低く制限される場合が考えられる。そこで、クラッチスリップ可否判断手段146は、電動機MGのトルク不足が生じるか否かを判断するための充電残量判定値LTSOCを予め設定された関係から前記要求駆動トルクToutdに基づいて決定し、蓄電装置46の充電残量SOCがその所定の充電残量判定値LTSOC未満であるか否かを判断する。そして、充電残量SOCが充電残量判定値LTSOC未満であれば、前記式(1)が成立する電動機MGのトルク不足が生じるものと判断する。上記充電残量判定値LTSOCは、前記クラッチスリップ制御を実行すれば充電残量SOCの不足に起因して要求駆動トルクToutdに対する電動機MGのトルク不足が生じるか否かを判断できるように、要求駆動トルクToutdと関連付けて予め実験的に設定されており、その実験的に設定された充電残量判定値LTSOCと要求駆動トルクToutdとの関係では、充電残量判定値LTSOCは要求駆動トルクToutdが大きいほど大きくなる。
【0047】
クラッチスリップ制御手段148は、前記クラッチスリップ制御が開始されても良いとクラッチスリップ可否判断手段146により判断された場合に、そのクラッチスリップ制御を実行する。そのクラッチスリップ制御が開始されても良いとクラッチスリップ可否判断手段146により判断されたということは、エンジン作動状態判断手段140によりエンジン10が作動中であると判断され、車両加速判断手段142によりアクセルペダル82が大きく踏み込まれたと判断され、且つ、ロックアップクラッチ作動状態判断手段144によりロックアップクラッチ42が解放状態であると判断されたと言うことを含んでいる。
【0048】
そして、クラッチスリップ制御手段148は、前記クラッチスリップ制御の実行中には、ポンプ回転速度Npとエンジン回転速度Neとを逐次検出し、そのポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)が所定の制御終了判定値LTEND以下になったか否かを逐次判断しており、その差回転(=Np−Ne)が制御終了判定値LTEND以下になった場合には、前記クラッチスリップ制御を終了すると共に、エンジン断続用クラッチK0を完全係合させる。上記制御終了判定値LTENDは、前記クラッチスリップ制御の終了時期を定めるための判定値であるが、図7等のタイムチャートに示すように、アクセルペダル82の踏込操作によってトルクコンバータ14の滑りが一時的に拡大した後、ポンプ回転速度Npはタービン回転速度Ntに収束していくと共に上記差回転(=Np−Ne)も縮小していくので、上記制御終了判定値LTENDは、前記クラッチスリップ制御の終了時に運転者にエンジン断続用クラッチK0の係合ショックを感じさせる等の違和感を与えることのないように、且つ、エンジン断続用クラッチK0のスリップを不必要に継続させてエンジン断続用クラッチK0を消耗させないように、実験的に予め定められている。
【0049】
また、クラッチスリップ制御手段148は、前記クラッチスリップ制御を実行すると共に、そのクラッチスリップ制御の実行中に用いられる高い燃費性能が得られるように予め実験的に定められた関係(クラッチスリップ制御時出力トルクマップ)から、アクセル開度Accに応じた要求駆動トルクToutdに基づいてその要求駆動トルクToutdが得られるようにエンジントルクTeの目標値(目標エンジントルクTe*)と電動機トルクTmgの目標値(目標電動機トルクTmg*)とをそれぞれ逐次決定し、エンジントルクTeをその目標エンジントルクTe*に一致させるように制御すると共に電動機トルクTmgをその目標電動機トルクTmg*に一致させるように制御する。要するに、クラッチスリップ制御手段148は、前記クラッチスリップ制御を実行すると共に、電動機MGによりトルクコンバータ14のポンプ翼車14aを回転駆動する。なお、そのクラッチスリップ制御中においてエンジン断続用クラッチK0がスリップしエンジン10は電動機MGに対して回転負荷として作用するので、目標エンジントルクTe*は負の値である。すなわち、クラッチスリップ制御中のエンジン10は、スロットル弁開度θTHに応じて定まる無負荷時のエンジン回転速度Neよりも高い回転速度で回転させられている。また、前記クラッチスリップ制御時出力トルクマップは、運転者に違和感を与えないようにするため、前記クラッチスリップ制御が実行されない場合すなわちエンジン断続用クラッチK0がスリップせず完全係合されているときと同一のトルクがトルクコンバータ14のポンプ翼車14aに逐次入力されるように定められるのが好ましい。
【0050】
クラッチスリップ制御手段148は、上述のようにエンジントルクTeと電動機トルクTmgとを制御すると共に、前記クラッチスリップ制御では、エンジン回転速度Neをタービン回転速度Ntに追従させるように例えば一致させるようにエンジン断続用クラッチK0をスリップさせる必要があるので、エンジン断続用クラッチK0のトルク容量に対応するそのエンジン断続用クラッチK0の係合圧PK0を逐次調節する。図7のタイムチャートを用いて前記クラッチスリップ制御におけるエンジン断続用クラッチK0の係合圧PK0の決定方法について説明する。そのエンジン断続用クラッチK0の係合圧PK0とは、エンジン断続用クラッチK0を係合作動させるためにエンジン断続用クラッチK0に供給される油圧である。
【0051】
図7は、車両発進時のタイムチャートであって、アクセルペダル82の踏込操作に応じてエンジン始動される共に、そのエンジン始動後に前記クラッチスリップ制御が実行されたときの各回転速度Ne,Np,Ntのタイムチャートである。図7においてtA1時点はロックアップオフでの車両6の加速開始時点すなわち車両6の発進開始時点であり、tA2時点はエンジン断続用クラッチK0の係合開始時点であり、tA3時点は加速終了時点である。すなわち、tA1時点からtA3時点までの間でポンプ回転速度Npがタービン回転速度Ntよりも高められトルクコンバータ14の滑りによるトルク増幅がなされて車両6が加速している。そして、tA2時点後にエンジン10が始動され、tA3時点でエンジン断続用クラッチK0が完全係合とされている。従って、図7では、前記クラッチスリップ制御は、そのエンジン始動時からtA3時点までの間で実行されている。
【0052】
図7において前記クラッチスリップ制御でエンジン回転速度Neはタービン回転速度Ntに一致するように制御されているが、クラッチスリップ制御手段148は、そのようにエンジン回転速度Neを変化させるために、ポンプ回転速度Npとタービン回転速度Ntとを逐次検出し、そのポンプ回転速度Npとタービン回転速度Ntとの差である入出力回転速度差DNpt(=Np−Nt)を逐次算出し、その入出力回転速度差DNptをそのまま目標差回転DNTとして逐次設定する。そして、ポンプ回転速度NpとエンジントルクTeと目標差回転DNTとをパラメータとして予め実験的に定められた図8のような係合圧マップがクラッチスリップ制御手段148に記憶されており、クラッチスリップ制御手段148は、その係合圧マップから、ポンプ回転速度NpとエンジントルクTeと目標差回転DNTとに基づいてエンジン断続用クラッチK0の係合圧PK0を逐次決定する。そして、エンジン断続用クラッチK0に対しその決定した係合圧PK0を油圧制御回路132に逐次出力させる。図8の係合圧マップは、ポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)と、ポンプ回転速度Npと、エンジントルクTeと、目標差回転DNTと、エンジン断続用クラッチK0の係合圧PK0との関係を予め実験的に求めたマップであるので、クラッチスリップ制御手段148は、その係合圧マップ中の差回転を前記目標差回転DNTとすることによりエンジン断続用クラッチK0の係合圧PK0を決定する。図8の係合圧マップにおけるポンプ回転速度Npは電動機回転速度センサ118により検出される電動機回転速度Nmgから逐次算出されるものである。上記係合圧マップにおけるエンジントルクTeはセンサ等によって検出される実際値でもよいが、本実施例では予め実験的に設定された関係からスロットル弁開度θTH及びエンジン回転速度Neに基づいて逐次推定される。例えば、図8において目標差回転DNTがN02でありエンジントルクTeがX2でありポンプ回転速度NpがY3であれば、クラッチスリップ制御手段148は、エンジン断続用クラッチK0の係合圧PK0をPK0(N02X2Y3)に決定する。また、上記係合圧マップにおいて各パラメータが予め設定された設定値間の値である場合たとえばポンプ回転速度NpがY1とY2との間の値である場合には、エンジン断続用クラッチK0の係合圧PK0は、直線補完など一般的に知られた補完方法により補完されて決定される。このようにしてクラッチスリップ制御手段148は、前記クラッチスリップ制御におけるエンジン断続用クラッチK0の係合圧PK0を逐次決定する。なお、前記クラッチスリップ制御の実行中には、エンジン10はエンジン断続用クラッチK0のスリップにより電動機MGに対する回転負荷として作用するので、図8の係合圧マップを構成するエンジントルクTeは負の値である。
【0053】
図9は、車両走行中における加速時のタイムチャートであって、図7と同様に、アクセルペダル82の踏込操作に応じてエンジン始動される共に、そのエンジン始動後に前記クラッチスリップ制御が実行されたときの各回転速度Ne,Np,Ntのタイムチャートである。図9は、車両発進時のタイムチャートである図7に対して、車両走行中における加速時のタイムチャートである点が異なっているが、それ以外は図7と同様である。従って、図9においてtB1時点はロックアップオフでの車両6の加速開始時点であり、tB2時点はエンジン断続用クラッチK0の係合開始時点であり、tB3時点は加速終了時点である。すなわち、tB1時点からtB3時点までの間でポンプ回転速度Npがタービン回転速度Ntよりも高められトルクコンバータ14の滑りによるトルク増幅がなされて車両6が加速している。そして、tB2時点後にエンジン10が始動され、tB3時点でエンジン断続用クラッチK0が完全係合とされているので、図9では、前記クラッチスリップ制御は、そのエンジン始動時からtB3時点までの間で実行されている。
【0054】
前述したように、クラッチスリップ制御手段148は、前記クラッチスリップ制御において、基本的には前記入出力回転速度差DNptをそのまま目標差回転DNTとして設定するが、そのまま目標差回転DNTとして設定するとエンジン断続用クラッチK0の耐久性が損なわれるおそれがある場合には、上記目標差回転DNTにガードをかける。言い換えれば、その目標差回転DNTを入出力回転速度差DNptよりも小さくなるように制限する。具体的には、クラッチスリップ制御手段148は、前記クラッチスリップ制御の実行中に、ポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)が予め定められた差回転上限値LTDFよりも大きい状態が、所定の判定時間TIMEDF以上継続したか否かを逐次判断することによって、エンジン断続用クラッチK0の耐久性が損なわれるおそれがあるか否かを判断する。そして、その差回転(=Np−Ne)が差回転上限値LTDFよりも大きい状態が前記判定時間TIMEDF以上継続したと判断した場合には、前記入出力回転速度差DNptをそのまま目標差回転DNTとして設定するのではなく、エンジン断続用クラッチK0の耐久性確保のために、目標差回転DNTを入出力回転速度差DNptよりも小さく設定する。例えば、零よりも大きく且つ1よりも小さい所定係数を入出力回転速度差DNptに乗じて得た値を目標差回転DNTとして設定してもよいし、入出力回転速度差DNptから正の値である所定値を差し引いて得た値を目標差回転DNTとして設定してもよい。クラッチスリップ制御手段148は、前記クラッチスリップ制御において、そのように目標差回転DNTを入出力回転速度差DNptよりも小さく設定することで、エンジン断続用クラッチK0をスリップさせつつエンジン回転速度Neをタービン回転速度Ntよりも高くする。前記差回転上限値LTDF及び前記判定時間TIMEDFは、エンジン断続用クラッチK0の耐久性を確保できるように実験的に予め定められており、その判定時間TIMEDFは、アクセルペダル82踏込時にトルクコンバータ14の滑りが一時的に拡大する期間が短時間であることを加味して、その判定時間TIMEDFについての判断後に前記目標差回転DNTのガードを実施できるように極短時間であり、且つ、エンジン断続用クラッチK0の耐久性に影響しない程度の瞬間的な上記差回転(=Np−Ne)の変化を判断対象から除けるように設定されている。
【0055】
図10および図11は、何れも、前記クラッチスリップ制御において目標差回転DNTにガードがかけられた場合の各回転速度Ne,Np,Ntを示すタイムチャートである。図10は車両発進時のタイムチャートである一方で、図11は車両走行中における加速時のタイムチャートである。すなわち、図10は、目標差回転DNTにガードがかけられていること以外は図7と同様であり、図11は、目標差回転DNTにガードがかけられていること以外は図9と同様である。従って、図10および図11においてtC1時点とtD1時点とはロックアップオフでの車両6の加速開始時点であり、tC2時点とtD2時点とはエンジン断続用クラッチK0の係合開始時点であり、tC3時点とtD3時点とは加速終了時点である。すなわち、図10のtC1時点からtC3時点までの間、及び、図11のtD1時点からtD3時点までの間でそれぞれ、ポンプ回転速度Npがタービン回転速度Ntよりも高められトルクコンバータ14の滑りによるトルク増幅がなされて車両6が加速している。そして、図10ではtC2時点後にエンジン10が始動され、tC3時点でエンジン断続用クラッチK0が完全係合とされているので、前記クラッチスリップ制御は、そのエンジン始動時からtC3時点までの間で実行されている。また、図11ではtD2時点後にエンジン10が始動され、tD3時点でエンジン断続用クラッチK0が完全係合とされているので、前記クラッチスリップ制御は、そのエンジン始動時からtD3時点までの間で実行されている。図10及び図11では、前記クラッチスリップ制御の実行中に、目標差回転DNTが入出力回転速度差DNptよりも小さく設定されたため、エンジン回転速度Neはタービン回転速度Ntよりも高くなっている。
【0056】
ところで、前述したように、クラッチスリップ可否判断手段146によって、前記クラッチスリップ制御の開始時から要求駆動トルクToutdに対してトルク不足になるか否かが判断されるが、前記クラッチスリップ制御の実行途中で電動機MGが要求駆動トルクToutdに対してトルク不足になることも考え得る。そこで、そのクラッチスリップ制御の実行途中でのトルク不足の発生を回避するため、クラッチスリップ制御手段148は、そのクラッチスリップ制御の実行中において、電動機MGが要求駆動トルクToutdに対してトルク不足になるか否かを判断する。このクラッチスリップ制御手段148の判断でも、前記クラッチスリップ可否判断手段146による判断と同様に、電動機MGが要求駆動トルクToutdに対してトルク不足になることとは、前記式(1)が成立することである。クラッチスリップ制御手段148は、上記トルク不足が生じる前にその判断をする必要があるので、クラッチスリップ可否判断手段146による判断と同様に、蓄電装置46の充電残量SOCを用いて、上記トルク不足が生じるか否かを判断する。すなわち、クラッチスリップ制御手段148は、前記クラッチスリップ制御の実行中において、前記充電残量判定値LTSOCを予め設定された関係から要求駆動トルクToutdに基づいて逐次決定し、蓄電装置46の充電残量SOCがその所定の充電残量判定値LTSOC未満であるか否かを逐次判断する。そして、充電残量SOCが充電残量判定値LTSOC未満であれば前記式(1)が成立する電動機MGのトルク不足が生じるものと判断する。クラッチスリップ制御手段148は、その電動機MGのトルク不足が生じるものと判断した場合には、図12のタイムチャートに示すように、前記クラッチスリップ制御を終了すると共に、エンジン回転速度Neをポンプ回転速度Npに近付けるように引き上げてエンジン断続用クラッチK0を完全係合させる。そして、エンジン断続用クラッチK0の完全係合後には、電動機MGおよびエンジン10からの動力によって要求駆動トルクToutdが達成される。
【0057】
図12は、前記クラッチスリップ制御の実行中に電動機MGが要求駆動トルクToutdに対してトルク不足になると判断された場合におけるエンジン断続用クラッチK0の係合タイミングとエンジン回転速度Neの変化とを説明するためのタイムチャートである。図12では、車両6の加速初期には電動機トルクTmgが要求駆動トルクToutdに対し十分に高められているが、その後、充電残量SOCの低下により電動機出力Pmgが制限されて、換算電動機トルクTmgecが要求駆動トルクToutdを下回るまでに低下している。図12のtE1時点は車両6の発進開始時点であり、tE2時点はエンジン断続用クラッチK0の係合開始時点であり、tE3時点はエンジン断続用クラッチK0の完全係合時点であり、クラッチスリップ制御手段148が電動機MGのトルク不足が生じるものとtE2時点からtE3時点までの間で判断している。図12のように、クラッチスリップ制御手段148は、その電動機MGのトルク不足が生じるものと判断した場合にエンジン断続用クラッチK0を完全係合させる際には、電動機MGの駆動電流に基づいて求まる電動機トルクTmgとポンプ回転速度Npとタービン回転速度Ntと自動変速機18の変速比γとを逐次検出すると共にそれらに基づき前記換算電動機トルクTmgecを逐次算出しつつ、エンジン回転速度Neをポンプ回転速度Npに近付けるように引き上げ、上記換算電動機トルクTmgecが要求駆動トルクToutdを下回る時までに、好ましくは換算電動機トルクTmgecが要求駆動トルクToutdを下回る時(瞬間)に同期して、エンジン断続用クラッチK0を完全係合させる。換算電動機トルクTmgecを逐次算出しておれば、その換算電動機トルクTmgecと要求駆動トルクToutdとの差の変化から、換算電動機トルクTmgecが要求駆動トルクToutdを下回る時を予測できる。
【0058】
図13は、電子制御装置110の制御作動の要部、すなわち、前記クラッチスリップ制御を実行する制御作動を説明するためのフローチャートであり、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。この図13に示す制御作動は、単独で或いは他の制御作動と並列的に実行される。
【0059】
先ず、エンジン作動状態判断手段140に対応するステップ(以下、「ステップ」を省略する)SA1においては、エンジン10が作動中であるか否かが判断される。このSA1の判断が肯定された場合、すなわち、エンジン10が作動中である場合には、SA2に移る。一方、このSA1の判断が否定された場合には、本フローチャートは終了する。
【0060】
車両加速判断手段142に対応するSA2においては、アクセルペダル82が大きく踏み込まれたか否か、言い換えれば、運転者により車両6の加速操作がなされたか否かが判断される。このSA2の判断が肯定された場合、すなわち、アクセルペダル82が大きく踏み込まれた場合には、SA3に移る。一方、このSA2の判断が否定された場合には、本フローチャートは終了する。
【0061】
ロックアップクラッチ作動状態判断手段144に対応するSA3においては、ロックアップクラッチ42が解放状態であるか否かが判断される。このSA3の判断が肯定された場合、すなわち、ロックアップクラッチ42が解放状態である場合には、SA4に移る。一方、このSA3の判断が否定された場合には、本フローチャートは終了する。
【0062】
SA4においては、前記クラッチスリップ制御が実行中であるか否かが判断される。このSA4の判断が肯定された場合、すなわち、前記クラッチスリップ制御が実行中である場合には、SA6に移る。一方、このSA4の判断が否定された場合には、SA5に移る。
【0063】
SA5においては、電動機MGが前記クラッチスリップ制御の開始時から要求駆動トルクToutdに対してトルク不足になるか否かが判断される。具体的にこのSA5の判断は、蓄電装置46の充電残量SOCに基づいてなされる。このSA5の判断が肯定された場合、すなわち、電動機MGが前記クラッチスリップ制御の開始時から要求駆動トルクToutdに対してトルク不足になる場合には、本フローチャートは終了する。一方、このSA5の判断が否定された場合には、SA6に移る。なお、SA4およびSA5はクラッチスリップ可否判断手段146に対応する。
【0064】
SA6においては、ポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)が縮小して所定の制御終了判定値LTEND以下になったか否かが判断される。このSA6の判断が肯定された場合、すなわち、上記差回転(=Np−Ne)が縮小して所定の制御終了判定値LTEND以下になった場合には、SA7に移る。一方、このSA6の判断が否定された場合には、SA8に移る。
【0065】
SA7においては、前記クラッチスリップ制御が終了されると共に、エンジン断続用クラッチK0が完全係合される。
【0066】
SA8においては、電動機MGが要求駆動トルクToutdに対してトルク不足になるか否かが判断される。具体的にこのSA8の判断は、SA5と同様に蓄電装置46の充電残量SOCに基づいてなされる。このSA8の判断が肯定された場合、すなわち、電動機MGが要求駆動トルクToutdに対してトルク不足になる場合には、SA9に移る。一方、このSA8の判断が否定された場合には、SA10に移る。
【0067】
SA9においては、例えば図12のタイムチャートに示すように、エンジン回転速度Neがポンプ回転速度Npに近付くように引き上げられ、エンジン断続用クラッチK0が、換算電動機トルクTmgecが要求駆動トルクToutdを下回る時までに、好ましくは換算電動機トルクTmgecが要求駆動トルクToutdを下回る時(瞬間)に同期して完全係合するようにエンジン断続用クラッチK0の係合圧PK0が制御される。
【0068】
SA10においては、エンジントルクTe及び電動機トルクTmgの制御と共に前記クラッチスリップ制御が実行され、それらの制御が既に実行中であればそのまま継続される。具体的にSA10では、図14のサブルーチンが実行される。なお、SA6〜SA10はクラッチスリップ制御手段148に対応する。
【0069】
図14は、図13のSA10にて実行される制御作動を説明するためのフローチャートである。図14の全ステップはクラッチスリップ制御手段148に対応する。
【0070】
図14のSB1においてはタービン回転速度Ntが検出され、続くSB2においてはポンプ回転速度Npが検出される。SB2の次はSB3に移る。
【0071】
SB3においては、エンジン断続用クラッチK0の耐久性確保のために、前記目標差回転DNTにガードをかける必要があるか否かが判断される。具体的には、ポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)が前記差回転上限値LTDFよりも大きい状態が、前記所定の判定時間TIMEDF以上継続したか否かが判断され、その差回転(=Np−Ne)が差回転上限値LTDFよりも大きい状態が所定の判定時間TIMEDF以上継続した場合に、上記目標差回転DNTにガードをかける必要があると判断される。このSB3の判断が肯定された場合、すなわち、上記目標差回転DNTにガードをかける必要がある場合には、SB5に移る。一方、このSB3の判断が否定された場合には、SB4に移る。
【0072】
SB4においては、前記入出力回転速度差DNpt(=Np−Nt)が算出され、その入出力回転速度差DNptがそのまま目標差回転DNTとして設定される。SB4の次はSB6に移る。
【0073】
SB5においては、ガードされた目標差回転DNTが設定される。すなわち、前記入出力回転速度差DNptが算出され、目標差回転DNTがその入出力回転速度差DNptよりも小さく設定される。例えば、零よりも大きく且つ1よりも小さい所定係数をその入出力回転速度差DNptに乗じて得た値が目標差回転DNTとして設定されるとしてもよい。SB5の次はSB6に移る。
【0074】
SB6においては、エンジン断続用クラッチK0の係合圧PK0が、図8の係合圧マップから、ポンプ回転速度NpとエンジントルクTeと目標差回転DNTとに基づいて決定される。その係合圧マップでは、上記係合圧PK0は、係合圧マップ中の差回転に目標差回転DNTが代入されて決定される。SB6の次はSB7に移る。
【0075】
SB7においては、前記SB6で決定された係合圧PK0が油圧制御回路132からエンジン断続用クラッチK0に対して出力される。また、エンジントルクTeと電動機トルクTmgとが、要求駆動トルクToutdに基づいてその要求駆動トルクToutdが得られるように制御される。SB7の次は、図13のSA10に戻ってSA4に移る。
【0076】
本実施例によれば、クラッチスリップ制御手段148は、車両6の加速操作時には、電動機MGによりトルクコンバータ14のポンプ翼車14aを回転駆動し、それと共に、エンジン回転速度Neをタービン回転速度Ntに追従させるように例えば一致させるようにエンジン断続用クラッチK0をスリップさせる前記クラッチスリップ制御を実行する。従って、車両6の加速操作時にエンジン断続用クラッチK0をスリップしない係合状態(完全係合状態)にしてエンジン回転速度Neをトルクコンバータ14のポンプ翼車14aと同一の回転速度とする場合と比較して、車両加速中のエンジン10の回転加速度が低められエンジン10の慣性トルクが小さくなり、エンジン回転速度Neが低く推移するので、車両6の燃費悪化を抑制することができる。また、タービン回転速度Ntは車速Vに対応しており、前記クラッチスリップ制御ではエンジン回転速度Neはそのタービン回転速度Ntに一致するように制御されるので、エンジン回転速度Neは車速上昇に同調して上昇することになる。そのため、加速操作時にエンジン回転速度Neがタービン回転速度Ntと一致するように制御されない場合と比較して、運転者に与える違和感を低減できる。例えば、運転者によるアクセルペダル82踏込後の車速上昇が緩やかであるにも拘らずエンジン回転速度Neが急上昇すれば、車両6の加速がアクセルペダル82の踏込操作に対して遅れているような違和感を運転者に対して与えることがある。
【0077】
また、本実施例によれば、クラッチスリップ制御手段148は、前記クラッチスリップ制御の実行中に、ポンプ回転速度Npとエンジン回転速度Neとの差回転(=Np−Ne)が予め定められた差回転上限値LTDFよりも大きい状態が、所定の判定時間TIMEDF以上継続した場合には、目標差回転DNTを入出力回転速度差DNpt(=Np−Nt)よりも小さく設定する。これにより、エンジン断続用クラッチK0をスリップさせつつエンジン回転速度Neをタービン回転速度Ntよりも高くする。従って、エンジン断続用クラッチK0のスリップがある程度抑制されるので、エンジン断続用クラッチK0の耐久性を確保しつつ、前記クラッチスリップ制御を実行することが可能である。
【0078】
また、本実施例によれば、トルクコンバータ14は、そのトルクコンバータ14のポンプ翼車14aとタービン翼車14bとを直結可能なロックアップクラッチ42を備えており、前記クラッチスリップ制御は、そのロックアップクラッチ42が解放状態であるときに実行される。従って、図7等のタイムチャートに示すように、車両6の加速操作時においてポンプ回転速度Npはロックアップクラッチ42が解放状態であるときにタービン回転速度Ntよりも高くなり得るので、ロックアップクラッチ42の作動状態に応じた適切な時期に前記クラッチスリップ制御を実行することが可能である。
【0079】
また、本実施例によれば、クラッチスリップ可否判断手段146は、前記クラッチスリップ制御の実行開始に先立って、電動機MGが前記クラッチスリップ制御の開始時から要求駆動トルクToutdに対してトルク不足になるか否かを判断し、トルク不足にならなければ前記クラッチスリップ制御が開始されても良いと判断する。そして、クラッチスリップ制御手段148は、前記クラッチスリップ制御が開始されても良いとクラッチスリップ可否判断手段146により判断された場合に、そのクラッチスリップ制御を実行する。また、クラッチスリップ制御手段148は、上記クラッチスリップ制御の実行中において要求駆動トルクToutdに対する電動機MGのトルク不足が生じるものと判断した場合には、そのクラッチスリップ制御を終了する。要するに、クラッチスリップ制御手段148は、要求駆動トルクToutdに対して電動機MGがトルク不足にならないことを条件に、上記クラッチスリップ制御を実行する。従って、車両6の走行性能を損なわないように前記クラッチスリップ制御を実行することが可能である。
【0080】
以上、本発明の実施例を図面に基づいて詳細に説明したが、これはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【0081】
例えば、前述の実施例において、図1では電動機MGはエンジン10の回転軸心(第1軸心RC1)とは異なる第2軸心RC2上に配設されているが、図15に示すように、エンジン10、エンジン断続用クラッチK0、電動機MG、トルクコンバータ14、及び自動変速機18が、第1軸心RC1上に順次直列に連結され配設されていても差し支えない。図15のように電動機MGがエンジン10およびトルクコンバータ14等と直列に配設されれば、電動機回転速度Nmgはポンプ回転速度Npと等しくなる。
【0082】
また、前述の実施例において、図13のフローチャートにはSA1が設けられているが、SA1が無くそのフローチャートはSA2から開始されるものであっても差し支えない。
【0083】
また、前述の実施例において、図13のフローチャートのSA3の判断は、ロックアップクラッチ42が解放状態である場合に肯定されるが、ロックアップクラッチ42がスリップ状態である場合にも肯定されて差し支えない。
【0084】
また、前述の実施例において、図13のフローチャートにはSA4及びSA5が設けられているが、そのSA4及びSA5が無くそのフローチャートはSA3の判断が肯定された場合にSA6に移るものであっても差し支えない。
【0085】
また、前述の実施例において、図13のフローチャートにはSA8及びSA9が設けられているが、そのSA8及びSA9が無くそのフローチャートはSA6の判断が否定された場合にSA10に移るものであっても差し支えない。
【0086】
また、前述の実施例において、図14のフローチャートにはSB3及びSB5が設けられているが、そのSB3及びSB5が無くそのフローチャートはSB2の次にSB4に移るものであっても差し支えない。
【0087】
また、前述の実施例において、前記式(1)では要求駆動トルクToutdと換算電動機トルクTmgecとは、出力歯車72におけるトルクとして相互に比較されているが、両者が同一の箇所におけるトルクとして相互に比較されるのであれば、駆動車軸30など動力伝達経路の何れの箇所で相互に比較されてもよい。
【0088】
また、前述の実施例において、図8の係合圧マップにはパラメータとしてエンジントルクTeが採用されているが、スロットル弁開度θTHとエンジントルクTeとは相互に対応するので、そのエンジントルクTeに替えてスロットル弁開度θTHが上記係合圧マップにパラメータとして採用されていても差し支えない。
【0089】
また、前述の実施例において、クラッチスリップ可否判断手段146とクラッチスリップ制御手段148とは、電動機MGが要求駆動トルクToutdに対してトルク不足になるか否かを、蓄電装置46の充電残量SOCについて判断することで予測して判断しているが、その充電残量SOC以外の物理値を用いて上記トルク不足になるか否かを予測して判断しても差し支えない。例えば、電動機MGが高温状態になるとその電動機MGの発熱を抑えるため電動機トルクTmgが制限され、それにより上記トルク不足が生じる場合が考えられるので、クラッチスリップ可否判断手段146とクラッチスリップ制御手段148とは、電動機MGの温度(電動機温度)に基づいて、電動機MGが要求駆動トルクToutdに対してトルク不足になるか否かを判断しても差し支えない。
【0090】
また、前述の実施例において、駆動装置8は、FF型の車両6において横置きにされるものであるが、車両6はFR型であってもよいし、駆動装置8は縦置きにされてもよい。
【0091】
また、前述の実施例において、電動機MGは、電動機出力ギヤ56と電動機連結ギヤ58とによって構成された1対のギヤ対により、トルクコンバータ14のポンプ翼車14aに連結されているが、そのようなギヤ対に限らず、伝動ベルトやチェーンによってポンプ翼車14aに連結されていても差し支えない。
【0092】
また、前述の実施例において、ロックアップクラッチ42が設けられているが、ロックアップクラッチ42は必須ではない。
【0093】
また、前述の実施例の駆動装置8において、トルクコンバータ14が流体伝動装置として用いられているが、例えば、そのトルクコンバータ14は、トルク増幅作用のないフルードカップリング等の流体継手に置き換わっていても差し支えない。
【0094】
また、前述の実施例において、自動変速機18は有段の自動変速機であるが、無段階に変速比γを変更できるCVTであっても差し支えない。また、自動変速機18を備えない駆動装置8も考え得る。
【0095】
また、前述の実施例において、油圧ポンプ16は電動機MGによって回転駆動される機械式のオイルポンプであるが、電動オイルポンプであっても差し支えない。また、油圧ポンプ16が電動オイルポンプであれば、油圧ポンプ16は第1軸心RC1上とは別個に設けられても差し支えなく、電動機MGによって回転駆動される必要もない。
【符号の説明】
【0096】
6:車両
8:駆動装置(車両用駆動装置)
10:エンジン
14:トルクコンバータ(流体伝動装置)
14a:ポンプ翼車(入力側回転要素)
14b:タービン翼車(出力側回転要素)
28:駆動輪
42:ロックアップクラッチ
110:電子制御装置(制御装置)
MG:電動機
K0:エンジン断続用クラッチ
【特許請求の範囲】
【請求項1】
エンジン断続用クラッチを介してエンジンからの動力が入力される入力側回転要素と駆動輪へ動力を出力する出力側回転要素とを有する流体伝動装置と、前記入力側回転要素に連結された電動機とを備えた車両用駆動装置の制御装置であって、
車両の加速操作時には、前記電動機により前記入力側回転要素が回転駆動され、それと共に、前記エンジンの回転速度を前記出力側回転要素の回転速度に追従させるように前記エンジン断続用クラッチをスリップさせるクラッチスリップ制御を実行する
ことを特徴とする車両用駆動装置の制御装置。
【請求項2】
前記クラッチスリップ制御の実行中に、前記入力側回転要素の回転速度と前記エンジンの回転速度との差回転が予め定められた差回転上限値よりも大きい状態が、所定の判定時間以上継続した場合には、前記エンジン断続用クラッチをスリップさせつつ前記エンジンの回転速度を前記出力側回転要素の回転速度よりも高くする
ことを特徴とする請求項1に記載の車両用駆動装置の制御装置。
【請求項3】
前記流体伝動装置は、該流体伝動装置の入力側回転要素と出力側回転要素とを直結可能なロックアップクラッチを備えており、
該ロックアップクラッチが解放状態であるときに前記クラッチスリップ制御を実行する
ことを特徴とする請求項1又は2に記載の車両用駆動装置の制御装置。
【請求項1】
エンジン断続用クラッチを介してエンジンからの動力が入力される入力側回転要素と駆動輪へ動力を出力する出力側回転要素とを有する流体伝動装置と、前記入力側回転要素に連結された電動機とを備えた車両用駆動装置の制御装置であって、
車両の加速操作時には、前記電動機により前記入力側回転要素が回転駆動され、それと共に、前記エンジンの回転速度を前記出力側回転要素の回転速度に追従させるように前記エンジン断続用クラッチをスリップさせるクラッチスリップ制御を実行する
ことを特徴とする車両用駆動装置の制御装置。
【請求項2】
前記クラッチスリップ制御の実行中に、前記入力側回転要素の回転速度と前記エンジンの回転速度との差回転が予め定められた差回転上限値よりも大きい状態が、所定の判定時間以上継続した場合には、前記エンジン断続用クラッチをスリップさせつつ前記エンジンの回転速度を前記出力側回転要素の回転速度よりも高くする
ことを特徴とする請求項1に記載の車両用駆動装置の制御装置。
【請求項3】
前記流体伝動装置は、該流体伝動装置の入力側回転要素と出力側回転要素とを直結可能なロックアップクラッチを備えており、
該ロックアップクラッチが解放状態であるときに前記クラッチスリップ制御を実行する
ことを特徴とする請求項1又は2に記載の車両用駆動装置の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2012−96667(P2012−96667A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−246180(P2010−246180)
【出願日】平成22年11月2日(2010.11.2)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年11月2日(2010.11.2)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]