
車両用駆動装置の制御装置
【課題】ハイブリッド車両において、エンジンの暖機過程における車両の燃費悪化を抑制することができる車両用駆動装置の制御装置を提供する。
【解決手段】走行用出力制御手段88は、エンジンの暖機過程では、エンジン出力割合RPeをエンジンの暖機完了後よりも小さくし、エンジン出力Peと電動機出力Pmgとの和が車両要求パワーPreqとなるように電動機MGを作動させる。そのため、エンジンの暖機過程では、そのエンジンの暖機完了後と比較して、エンジンの冷却による熱損失が拡大するところ、その冷却による熱損失が抑えられる。従って、エンジンの暖機過程における車両の燃費悪化を抑制することができる。
【解決手段】走行用出力制御手段88は、エンジンの暖機過程では、エンジン出力割合RPeをエンジンの暖機完了後よりも小さくし、エンジン出力Peと電動機出力Pmgとの和が車両要求パワーPreqとなるように電動機MGを作動させる。そのため、エンジンの暖機過程では、そのエンジンの暖機完了後と比較して、エンジンの冷却による熱損失が拡大するところ、その冷却による熱損失が抑えられる。従って、エンジンの暖機過程における車両の燃費悪化を抑制することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハイブリッド車両用駆動装置の制御装置に関し、特に、エンジンの冷間時における出力制御の改良に関する。
【背景技術】
【0002】
エンジンおよび走行用電動機の動力が駆動輪に伝達される車両において、予め設定されたエンジン動作曲線に従って前記エンジンを制御する車両用駆動装置の制御装置が、従来から知られている。例えば、特許文献1に記載された車両の制御装置がそれである。この特許文献1の車両は所謂ハイブリッド車両であり、走行用駆動力源であるエンジンおよび第2電動機と、そのエンジンの動力を出力軸と第1電動機とに分配する動力分割機構とを備えている。この車両の制御装置は、上記エンジン動作曲線として、通常ラインと、同じパワー(エンジン出力)をその通常ラインを用いてエンジンから出力させる場合に比して高エンジン回転速度側で且つ低エンジントルク側にエンジンを制御するためのエミッションラインとを予め記憶した記憶装置を含んでいる。そして、上記制御装置は、エンジン水温が所定値以下であり且つ触媒温度が所定値以下である場合には、上記エミッションラインに従ってエンジンを制御する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】WO2010/079609号公報
【特許文献2】特開2010−260392号公報
【特許文献3】特開2010−241170号公報
【特許文献4】特開2003−097310号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1の制御装置は、前記エンジンの暖気制御中、すなわちエンジンが暖機完了に至る前の暖機過程では、前述したように、エンジンの制御に用いられる前記エンジン動作曲線を、暖機完了後に用いられる前記通常ラインに対して変更する。しかし、エンジン出力と前記第2電動機の出力との和に対するエンジン出力割合を上記暖機完了後に対して変更するものではない。また、前記エンジンの暖機過程では、エンジンの冷却による熱損失は、同じエンジン出力において比較すれば、前記暖機完了後よりも大きくなる。従って、前記特許文献1の制御装置が行うエンジン制御では、上記暖機過程において車両の燃費を悪化させるおそれがあった。なお、このような課題は未公知のことである。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、ハイブリッド車両において、エンジンの暖機過程における車両の燃費悪化を抑制することができる車両用駆動装置の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するための第1発明の要旨とするところは、(a)エンジンおよび走行用電動機の動力を駆動輪に伝達する車両用駆動装置の制御装置であって、(b)前記エンジンが暖機完了に至る前の暖機過程では、エンジン出力と前記走行用電動機の出力との和に対するエンジン出力割合を前記エンジンの暖機完了後よりも小さくすることを特徴とする。
【発明の効果】
【0007】
前記エンジンの暖機過程では、前記暖機完了後と比較して、エンジンの冷却による熱損失が拡大するところ、前記第1発明のように前記暖機過程でのエンジン出力割合を前記暖機完了後よりも小さくすれば、その冷却による熱損失が抑えられる。従って、前記エンジンの暖機過程における車両の燃費悪化を抑制することができる。なお、燃費とは、例えば単位燃料消費量当たりの走行距離等であり、燃費の向上とはその単位燃料消費量当たりの走行距離が長くなることであり、或いは、車両全体としての燃料消費率(=燃料消費量/駆動輪出力)が小さくなることである。逆に、燃費の低下(悪化)とはその単位燃料消費量当たりの走行距離が短くなることであり、或いは、車両全体としての燃料消費率が大きくなることである。
【0008】
また、第2発明の要旨とするところは、前記第1発明の車両用駆動装置の制御装置であって、(a)前記車両用駆動装置は、前記エンジンの動力を前記駆動輪へ出力し差動用電動機により差動状態が制御される電気式差動機構を備えており、(b)前記エンジンの暖機過程では、エンジン回転速度が、前記車両の要求出力に基づいて想定される前記暖機完了後のエンジン回転速度よりも高くなるように、エンジン出力を制御することを特徴とする。このようにすれば、前記差動用電動機の作動状態が上記想定される暖機完了後のエンジン回転速度を前提としたものと比較して発電側に変化するので、走行用駆動力源としての前記走行用電動機の出力を引き上げ易くなる。
【0009】
また、第3発明の要旨とするところは、前記第2発明の車両用駆動装置の制御装置であって、(a)前記エンジン出力割合を定めた出力割合マップが予め設定されており、(b)前記エンジンの温度に基づいてその出力割合マップから決定した前記エンジン出力と前記走行用電動機の出力とを、フィードフォワード制御により前記エンジンと前記走行用電動機とにそれぞれ出力させることを特徴とする。このようにすれば、前記エンジン出力と前記走行用電動機の出力とが前記車両の要求出力から直ちに決まるので、前記制御装置の制御負荷を軽減することが可能である。
【0010】
また、第4発明の要旨とするところは、前記第1発明から第3発明の何れか一の車両用駆動装置の制御装置であって、前記エンジンの暖機過程では、前記エンジン出力割合を前記エンジンの温度が低いほど小さくすることを特徴とする。このようにすれば、前記エンジンの冷却による熱損失がエンジンの温度が低いほど拡大するのに合わせて、車両の燃費悪化を抑制できるように、エンジン出力を過不足なく得ることが可能である。
【0011】
また、第5発明の要旨とするところは、前記第1発明から第4発明の何れか一の車両用駆動装置の制御装置であって、(a)予め設定されたエンジン動作曲線に従って前記エンジンを制御し、(b)前記エンジンの暖機過程では、前記エンジン動作曲線を前記エンジンの暖機完了後よりも低エンジントルク側に設定することを特徴とする。また、前記エンジンの熱効率の良い作動領域はエンジン温度が低いほど低エンジントルク側にずれる。従って、上記第5発明のようにすれば、前記エンジンの暖機過程では、その熱効率の良い作動領域のずれに合わせて前記エンジン動作曲線が設定されることになり、前記エンジンを燃費良く作動させることができる。
【0012】
ここで、好適には、前記エンジンの暖機完了後および暖機過程で用いられる前記エンジン動作曲線は、同じエンジン出力を得るとした場合に前記エンジンの燃費が最も良くなるようにそのエンジンを作動させるエンジン燃費最適線(エンジン燃費最適ライン)である。
【0013】
また、好適には、前記エンジンの暖機過程では、前記エンジン動作曲線から定まるアイドリング回転速度を前記エンジンの暖機完了後のアイドリング回転速度に一致させるようにしつつ、前記エンジンの温度が低いほど、前記エンジン動作曲線をより低エンジントルク側に設定する。このようにすれば、前記エンジンの暖機過程において、エンジンの温度に応じた熱効率の良い領域でエンジンを作動させ、車両の燃費悪化を抑制することが可能である。
【0014】
また、好適には、前記エンジンの暖機過程に対応して予め定められたそのエンジンの温度範囲の下限温度よりも低温側のエンジン低温温度範囲では、前記エンジン出力割合を前記エンジンの温度が低いほど大きくする。このようにすれば、蓄電装置などの電力供給源から前記走行用電動機が受ける電力が低温により制限されたとしても、前記エンジンおよび前記走行用電動機が出力不足にならないようにそれらを作動させることが可能である。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施例であるハイブリッド車両に係る駆動系統の構成を概念的に示す実施例1の図である。
【図2】図1のハイブリッド車両における電動機及びトルクコンバータ付近の構成を説明するために、その一部を切り欠いて示す断面図である。
【図3】図1のハイブリッド車両に搭載されたエンジンの暖機完了後と冷間時との間で、エンジントルクの特性を比較するための図である。
【図4】図1のハイブリッド車両に搭載されたエンジンの暖機完了後においてエンジン制御に用いられるエンジン動作曲線を表した図である。
【図5】図4に示す暖機完了後のエンジン動作曲線と共に、上記エンジンの暖機過程においてエンジン制御に用いられるエンジン動作曲線を表した図である。
【図6】図1のハイブリッド車両において、エンジンの暖機完了後および暖機過程において用いられるエンジン動作曲線とエンジン温度との関係を説明するための図である。
【図7】図1の電子制御装置に備えられた制御機能の要部を説明するための実施例1の機能ブロック線図である。
【図8】図1のハイブリッド車両において、所定の車両要求パワーに一致するように駆動用総出力(=エンジン出力+電動機出力)が発生させられた場合において、エンジン温度に応じたその駆動用総出力の内訳を模式的に表した図である。
【図9】図1のエンジンの暖機完了後、暖機過程、低温状態のそれぞれの場合において、図8に示される駆動用総出力の内訳を棒グラフで例示した図である。
【図10】図1の電子制御装置の制御作動の要部、すなわち、エンジンの暖機過程においてエンジンの出力制御を行う制御作動を説明するための実施例1のフローチャートである。
【図11】図1のハイブリッド車両において、エンジン12の暖機過程で用いられるエンジン動作曲線が、暖機完了後よりも高エンジン回転速度側にずらされ、エンジン温度が低いほど高エンジン回転速度側にずらされる場合を説明するための図である。
【図12】本発明が適用される車両用駆動装置を説明するための実施例2の骨子図である。
【図13】図12の車両用駆動装置において電子制御装置に入力される信号を例示した図であると共に、その電子制御装置に備えられた制御機能の要部を説明するための実施例2の機能ブロック線図である。
【図14】図5と同様にエンジン動作曲線を表した図であって、実施例2におけるエンジン指示出力および第2電動機指示出力の決定方法を説明するための図である。
【図15】図13の電子制御装置の制御作動の要部、すなわち、エンジンの暖機過程においてそのエンジンの出力制御を行う制御作動を説明するための実施例2のフローチャートである。
【図16】図12の車両用駆動装置において、低速から中速での車両走行時における第1遊星歯車装置の差動状態を表した共線図であり、図16(a)は図14のエンジン動作点hでエンジンが作動させられる場合の各回転要素の回転速度を表しており、図16(b)は図14のエンジン動作点c''でエンジンが作動させられる場合の各回転要素の回転速度を表している。
【図17】図12の車両用駆動装置において、中速から高速での車両走行時における第1遊星歯車装置の差動状態を表した共線図であり、図17(a)は図14のエンジン動作点hでエンジンが作動させられる場合の各回転要素の回転速度を表しており、図17(b)は図14のエンジン動作点c''でエンジンが作動させられる場合の各回転要素の回転速度を表している。
【発明を実施するための形態】
【0016】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【実施例1】
【0017】
図1は、本発明の一実施例であるハイブリッド車両8(以下、単に「車両8」ともいう)に係る駆動系統の構成を概念的に示す図である。この図1に示すハイブリッド車両8は、車両用駆動装置10(以下、「駆動装置10」という)と差動歯車装置21と左右1対の車軸22と左右1対の駆動輪24と油圧制御回路34とインバータ56と電子制御装置58とを備えている。そして、その駆動装置10は、走行用の駆動源として機能するエンジン12及び電動機MGと、エンジン断続用クラッチK0と、トルクコンバータ16と、自動変速機18と、油圧ポンプ28とを備えている。図1に示すように、ハイブリッド車両8は、エンジン12及び電動機MGにより発生させられた駆動力が、トルクコンバータ16、自動変速機18、差動歯車装置21、及び左右1対の車軸22をそれぞれ介して左右1対の駆動輪24へ伝達されるように構成されている。すなわち、駆動装置10は、エンジン12及び電動機MGの動力を駆動輪24に伝達する。斯かる構成から、上記ハイブリッド車両8は、上記エンジン12及び電動機MGの少なくとも一方を走行用の駆動源として駆動される。すなわち、上記ハイブリッド車両8においては、専ら上記エンジン12を走行用の駆動源とするエンジン走行、エンジン12を停止させると共に専ら上記電動機MGを走行用の駆動源とするEV走行(モータ走行)、及び、上記エンジン12及び電動機MGを走行用の駆動源とすると共に走行状態に応じてその電動機MGにより回生(発電)を行うEHV走行(ハイブリッド走行)の何れかが選択的に成立させられる。
【0018】
上記エンジン12は、例えば、燃料が燃焼室内に直接噴射される筒内噴射型のガソリンエンジンやディーゼルエンジン等の内燃機関である。また、エンジン12には、エンジン12の駆動(出力トルク)を制御するために、電子スロットル弁を開閉制御するスロットルアクチュエータ、燃料噴射制御を行う燃料噴射装置、及び点火時期制御を行う点火装置等を備えた出力制御装置14が設けられている。この出力制御装置14は、後述する電子制御装置58から供給される指令に従ってスロットル制御のために上記スロットルアクチュエータにより上記電子スロットル弁を開閉制御する他、燃料噴射制御のために上記燃料噴射装置による燃料噴射を制御し、点火時期制御のために上記点火装置による点火時期を制御する等して上記エンジン12の出力制御を実行する。
【0019】
前記電動機MGは、本発明の走行用電動機に対応しており、例えば3相の同期電動機であって、駆動力を発生させるモータ(発動機)としての機能と反力を発生させるジェネレータ(発電機)としての機能とを有するモータジェネレータであり、少なくとも上記モータとしての機能を有している。また、前記エンジン12とその電動機MGとの間の動力伝達経路には、係合状態に応じてその動力伝達経路における動力伝達を制御するエンジン断続用クラッチK0が設けられている。すなわち、前記エンジン12の出力部材であるエンジン出力軸26(例えばクランク軸)は、斯かるエンジン断続用クラッチK0を介して前記電動機MGのロータ30に選択的に連結されるようになっている。また、その電動機MGのロータ30は、前記トルクコンバータ16の入力部材であるフロントカバー32に相対回転不能に連結されている。
【0020】
上記エンジン断続用クラッチK0は、例えば、油圧アクチュエータによって係合制御される湿式多板型の油圧式摩擦係合装置であり、油圧制御回路34から供給される油圧に応じてその係合状態が係合(完全係合)、スリップ係合、乃至解放(完全解放)の間で制御されるようになっている。具体的には、このエンジン断続用クラッチK0が係合されることにより、上記エンジン出力軸26とフロントカバー32との間の動力伝達経路における動力伝達が行われる(接続される)。その一方で、上記エンジン断続用クラッチK0が解放されることにより、上記エンジン出力軸26とフロントカバー32との間の動力伝達経路における動力伝達が遮断される。また、上記エンジン断続用クラッチK0がスリップ係合されることにより、上記エンジン出力軸26とフロントカバー32との間の動力伝達経路においてそのエンジン断続用クラッチK0の伝達トルクに応じた動力伝達が行われる。
【0021】
前記自動変速機18は、トルクコンバータ16と駆動輪24との間の動力伝達経路の一部を構成しており、係合要素の掴み替えによりクラッチ・ツゥ・クラッチ変速を行う有段式の自動変速機構である。換言すれば、その自動変速機18は、予め定められた複数の変速段(変速比)の何れかが択一的に成立させられる自動変速機構であり、斯かる変速を行うために複数の係合要素と複数の遊星歯車装置とを備えて構成されている。例えば、その自動変速機18が有する係合要素は、湿式多板型のクラッチやブレーキ等であり、要するに油圧アクチュエータによって係合制御される油圧式摩擦係合装置である。自動変速機18では、前記油圧制御回路34から供給される油圧に応じてそれら複数の油圧式摩擦係合装置が選択的に係合乃至解放される。そして、それら油圧式摩擦係合装置の連結状態の組合せに応じて、例えば第1速から第4速である複数の前進変速段(前進ギヤ段、前進走行用ギヤ段)、或いは後進変速段(後進ギヤ段、後進走行用ギヤ段)の何れかが択一的に成立させられる。
【0022】
図2は、図1のハイブリッド車両8における前記電動機MG及びトルクコンバータ16付近の構成を説明するために、その一部を切り欠いて示す断面図である。なお、前記電動機MG、トルクコンバータ16、自動変速機18、及びエンジン出力軸26はそれらに共通の軸心Ctrに対して略対称的に構成されており、図2においては軸心Ctrの下半分が省略されている。この図2に示すように、前記電動機MG、トルクコンバータ16、及び自動変速機18は、何れもトランスミッションケース36内に収容されている。このトランスミッションケース36は、例えばアルミダイキャスト製の分割式ケースであり、車体等の非回転部材に固定されている。
【0023】
前記エンジン断続用クラッチK0は、円筒状のクラッチドラム38と、そのクラッチドラム38よりも小径であってクラッチドラム38と同心且つ相対回転可能に設けられた円筒状のクラッチハブ40と、それらクラッチドラム38とクラッチハブ40との間の円環状の間隙内に設けられた摩擦係合部材42と、その摩擦係合部材42を軸心Ctr方向において押圧するクラッチピストン44とを、備えている。上記クラッチドラム38は、前記電動機MGのロータ30におけるボス部30aに例えば溶接等により一体的に固設されており、そのロータ30と一体回転させられるようになっている。また、上記摩擦係合部材42は、上記クラッチドラム38に相対回転不能に係合された複数の円環板状のセパレータと、それら複数のセパレータ間にそれぞれ設けられて上記クラッチハブ40に相対回転不能に係合された複数の円環板状の摩擦プレートとを、備えている。
【0024】
このように構成された前記エンジン断続用クラッチK0においては、上記摩擦係合部材42が上記クラッチピストン44により軸心Ctr方向に押圧されて上記セパレータと摩擦プレートとが相互に摩擦係合させられることで、上記クラッチドラム38とクラッチハブ40との間の相対回転が抑制されるようになっている。すなわち、上記摩擦係合部材42のセパレータと摩擦プレートとの摩擦係合により、上記クラッチドラム38とクラッチハブ40との間が相互に動力伝達可能な状態とされる。なお、このエンジン断続用クラッチK0は、好適には、後述する電子制御装置58から指令が出力されない状態においては係合させられる常閉型(ノーマリークローズ)のクラッチとされる。
【0025】
前記エンジン出力軸26は、その出力端部すなわち前記電動機MG側の一端部がドライブプレート46等を介して前記エンジン断続用クラッチK0のクラッチハブ40と一体的に回転させられる回転軸48に連結されている。すなわち、前記エンジン出力軸26とクラッチハブ40とは、共通の軸心Ctrまわりに一体的に回転させられるように上記ドライブプレート46及び回転軸48等を介して連結されている。また、前記トルクコンバータ16のポンプ翼車16pには油圧ポンプ28が連結されており、そのポンプ翼車16pの回転に伴いその油圧ポンプ28により発生させられた油圧が前記油圧制御回路34に元圧として供給されるようになっている。
【0026】
トルクコンバータ16は、電動機MGと自動変速機18との間に介装されており、軸心Ctrまわりに回転するように配設された流体伝動装置であり、ポンプ翼車16pとタービン翼車16tとステータ翼車16sとフロントカバー32とを備えている。そして、トルクコンバータ16は、ポンプ翼車16pに入力された駆動力をタービン翼車16tへ流体(作動油)を介して伝達する。このトルクコンバータ16のポンプ翼車16pは、フロントカバー32に一体的に固設されており、そのフロントカバー32と一体回転させられるようになっている。従って、ポンプ翼車16pはトルクコンバータ16の入力側回転要素であって、そのポンプ翼車16pには、電動機MGからの駆動力が入力されると共に、エンジン12からの動力がエンジン断続用クラッチK0の係合または解放により選択的に入力される。タービン翼車16tは、自動変速機18の入力軸である変速機入力軸19にスプライン嵌合等によって相対回転不能に連結されている。すなわち、タービン翼車16tは、駆動輪24に向けて動力を出力する回転要素であり、要するに、トルクコンバータ16の出力側回転要素である。ステータ翼車16sは、非回転部材であるトランスミッションケース36に一方向クラッチを介して連結されている。
【0027】
また、トルクコンバータ16は、ポンプ翼車16pとタービン翼車16tとの間に、ポンプ翼車16p及びタービン翼車16tを選択的に相互に直結するロックアップクラッチLUを備えている。このロックアップクラッチLUは、油圧制御回路34から供給される油圧に応じてその係合状態が係合(完全係合)、スリップ係合、乃至解放(完全解放)の間で制御されるようになっている。
【0028】
前記電動機MGは、前記回転軸48の外周側において前記トランスミッションケース36により軸心Ctrまわりの回転可能に支持されたロータ30と、そのロータ30の外周側において前記トランスミッションケース36に一体的に固定されたステータ50とを、備えている。前記ロータ30は、1対の軸受52を介して前記トランスミッションケース36に回転可能に支持された円筒状のボス部30aと、上記ステータ50の内周側においてそのステータ50との間に僅かな隙間を隔てた状態で軸心Ctr方向に積層された複数の円環状の鋼板を有するロータ部30bと、それらボス部30aとロータ部30bとを一体に連結する連結部30cとを、備えている。前記ロータ30は、上記ロータ部30bの内周側に連結されると共に例えば溶接等により前記フロントカバー32に一体的に固定された伝達部材54を介してそのフロントカバー32に連結されている。また、上記ステータ50は、複数の円環状の鋼板がそれぞれ軸心Ctr方向に積層されたコア50aと、そのコア50aの内周部の周方向の一部に環状に巻き掛けられ、周方向に連続して複数設けられたコイル50bとを、備えている。このコア50aは、周方向の複数箇所においてボルト等により前記トランスミッションケース36に一体的に固定されている。
【0029】
このように構成された前記電動機MGは、図1に示すインバータ56を介してバッテリやコンデンサ等の蓄電装置57に接続されており、後述する電子制御装置58によりそのインバータ56が制御されることで上記コイル50bに供給される駆動電流が調節されることにより、前記電動機MGの駆動が制御されるようになっている。換言すれば、上記電子制御装置58によりそのインバータ56が制御されることで前記電動機MGの出力トルクTmg(以下、電動機トルクTmgという)が増減させられるようになっている。なお、斯かる電動機トルクTmgは、前記エンジン断続用クラッチK0の解放時(非係合時)には前記トルクコンバータ16に対してのみ出力されるが、前記エンジン断続用クラッチK0の係合時にはその電動機トルクTmgの一部が前記トルクコンバータ16に出力されると共に他部が前記エンジン12に出力される。また、電動機トルクTmgおよびエンジントルクTeは、エンジン12の回転方向に一致する方向、すなわち、駆動輪24を駆動する方向が正方向である。一方で、駆動輪24を制動する方向が負方向である。
【0030】
前記ハイブリッド車両8においては、例えば専ら前記電動機MGを走行用の駆動源とするEV走行から前記エンジン12を駆動源として用いるエンジン走行又はハイブリッド走行への移行に際して、前記エンジン断続用クラッチK0の係合により前記エンジン12の始動が行われる。すなわち、前記エンジン断続用クラッチK0がスリップ係合乃至完全係合させられることにより、そのエンジン断続用クラッチK0を介して伝達されるエンジン始動のためのトルクにより前記エンジン12が回転駆動され、それによりエンジン回転速度Neが引き上げられつつエンジン点火や燃料供給等が制御されることで前記エンジン12が始動される。また、この際に前記電動機MGにより補償トルクが発生させられ、車両前後方向の加速度(減速G)の発生が抑制される。すなわち、前記エンジン12の始動は、着火による爆発エネルギから得られるトルクと、前記エンジン断続用クラッチK0による係合エネルギから得られるトルクすなわちそのエンジン断続用クラッチK0を介して伝達されるエンジン始動トルクとで前記エンジン12が回転駆動されることにより行われる。
【0031】
また、前記ハイブリッド車両8は、図1に例示するような制御系統を備えている。この図1に示す電子制御装置58は、CPU、RAM、ROM、及び入出力インターフェース等を備えた所謂マイクロコンピュータを含んで構成されている。その電子制御装置58は、CPUがRAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従って信号処理を行うことにより、前記エンジン12の駆動制御、前記電動機MGの駆動制御、前記自動変速機18の変速制御、前記エンジン断続用クラッチK0の係合力制御、及び前記ロックアップクラッチLUの係合制御等の各種制御を実行する。
【0032】
図1に示すように、上記電子制御装置58には、前記ハイブリッド車両8に設けられた各センサにより検出される各種入力信号が供給されるようになっている。例えば、アクセル開度センサ60により検出されるアクセル開度Accを表す信号、電動機回転速度センサ62により検出される前記電動機MGの回転速度(電動機回転速度)Nmgを表す信号、エンジン回転速度センサ64により検出される前記エンジン12の回転速度(エンジン回転速度)Neを表す信号、タービン回転速度センサ66により検出される前記トルクコンバータ16のタービン翼車16tの回転速度(タービン回転速度)Ntを表す信号、車速センサ68により検出される車速Vを表す信号、エンジンオイルセンサ69により検出されるエンジンオイルの油温TEMPOilを表す信号、エンジン水温センサ70により検出される前記エンジン12の冷却水温TEMPwを表す信号、エンジン12に設けられた電子スロットル弁の開度であるスロットル開度θthを表す信号、及び蓄電装置57の充電残量(充電状態)SOCを表す信号等が、上記電子制御装置58に入力される。ここで、電動機回転速度センサ62により検出される電動機回転速度Nmgは、前記トルクコンバータ16の入力回転速度であり、そのトルクコンバータ16におけるポンプ翼車16pの回転速度(ポンプ回転速度)Npに相当する。また、上記タービン回転速度センサ66により検出されるタービン回転速度Ntは、前記トルクコンバータ16の出力回転速度であり、前記自動変速機18における変速機入力軸19の回転速度Natinすなわち変速機入力回転速度Natinに相当する。また、自動変速機18の出力軸20(以下、変速機出力軸20という)の回転速度Natoutすなわち変速機出力回転速度Natoutは、前記車速Vに対応する。
【0033】
また、前記電子制御装置58から、前記ハイブリッド車両8に設けられた各装置に各種出力信号が供給されるようになっている。例えば、前記エンジン12の駆動制御のためにそのエンジン12の出力制御装置14に供給される信号、前記電動機MGの駆動制御のために前記インバータ56に供給される信号、前記自動変速機18の変速制御のために前記油圧制御回路34における複数の電磁制御弁に供給される信号、前記エンジン断続用クラッチK0の係合制御のために前記油圧制御回路34における電磁制御弁に供給される信号、及び前記ロックアップクラッチLUの係合制御のために前記油圧制御回路34における電磁制御弁に供給される信号等が、前記電子制御装置58から各部へ供給される。
【0034】
電子制御装置58が実行するハイブリッド駆動制御及び自動変速機18の変速制御の概要に関して説明する。前記自動変速機18の変速制御は、予め定められた関係から前記ハイブリッド車両8の駆動状態(走行状態)に基づいて、電子制御装置58により実行される。例えば、その変速制御では、前記自動変速機18において成立させられるべき変速段(ギヤ段)が、予め設定されている変速マップ(変速線図)から、前記車速センサ68により検出される車速V及び前記アクセル開度センサ60により検出されるアクセル開度Acc等で表される前記駆動状態に基づいて判定される。そして、その判定に基づき、その成立させられるべき変速段が成立させられるように前記自動変速機18へ供給される油圧が制御される。具体的には、前記油圧制御回路34に備えられた各電子制御弁の作動(出力油圧)が電子制御装置58により制御され、それにより、その油圧制御回路34から前記自動変速機18における各油圧式摩擦係合装置の油圧アクチュエータへ供給される油圧が制御される。
【0035】
また、前記ハイブリッド車両8におけるハイブリッド駆動制御が、電子制御装置58により実行される。すなわち、前記エンジン12の駆動が出力制御装置14を介して制御されると共に電動機MGの作動が前記インバータ56を介して制御され、それにより、それらエンジン12及び電動機MGの少なくとも一方を走行用の駆動源とする前記ハイブリッド車両8の駆動制御が実行される。例えば、前記EV走行を行うEV走行モード(モータ走行モード)、前記エンジン走行を行うエンジン走行モード、前記EHV走行を行うEHV走行モード(ハイブリッド走行モード)等が、電子制御装置58により、前記ハイブリッド車両8の走行状態に応じて選択的に成立させられる。
【0036】
上記EV走行モードでは、基本的には前記エンジン12の駆動は停止させられるので、前記エンジン断続用クラッチK0は解放(完全解放)される。これにより、前記エンジン12と電動機MGとの間の動力伝達経路は遮断され、そのエンジン12から前記ロックアップクラッチ16側へ動力伝達は行われず、逆にそのロックアップクラッチ16側から前記エンジン12へのトルク伝達も行われない。
【0037】
前記エンジン走行モードでは、前記エンジン断続用クラッチK0は係合(完全係合)される。また、前記電動機MGは空転させられるが、走行状態に応じて回生を行うように作動させられるものであってもよい。
【0038】
前記EHV走行モードでは、前記エンジン断続用クラッチK0は係合(完全係合)される。このEHV走行モードにおいて、前記電動機MGは必ずしも常に走行用の駆動源として用いられるものでなくともよく、前記ハイブリッド車両8の走行状態に応じて空転させられたり、回生作動させられる等の制御が行われるものであってもよい。
【0039】
また、電子制御装置58は、前記電動機MGによる回生(発電)を制御する。すなわち、予め定められた関係から駆動力要求量としてのアクセル開度Acc等に基づいて回生の実行が判定された場合には、前記電動機MGにより回生が行われるようにその作動を制御する。このようにして前記電動機MGの回生により発生させられた電気エネルギは、前記インバータ56を介して図示しない蓄電装置57に蓄積される。そして、前記電動機MGが駆動源として用いられる際に、蓄電装置57から前記インバータ56を介してその電動機MGに電気エネルギが供給されて駆動力が発生させられる。
【0040】
前記エンジン12が、暖機完了に至る前の暖機過程(冷間時)において出力低下を生じる原因について、図3を用いて説明する。図3は、エンジン12の暖機完了後(単に、「暖機後」ともいう)と上記冷間時との間で、エンジントルクTeの特性を比較するための図である。図3は、エンジン回転速度Neおよびスロットル開度θthが上記暖機完了後と上記冷間時との間において各々同じという前提である。図3(a)(b)において、点hは上記暖機完了後におけるエンジン動作点であり、点cは上記冷間時におけるエンジン動作点である。また、図3(b)の実線L01は、上記暖機完了後において用いられる予め設定されたエンジン動作曲線である。
【0041】
図3(a)に示すように、エンジントルクTeとエンジン12の点火進角との関係は、全体的に、エンジン12の冷間時には暖機完了後と比較して低トルク側にずれる。従って、エンジン出力Peの目標値である目標エンジン出力Petすなわち出力指示値であるエンジン指示出力Petが上記暖機完了後と上記冷間時との間で変わらない場合、上記冷間時においては、ノッキングが生じ難いことを利用してエンジン12の点火時期を暖機完了後よりも進角させた(SAh→SAc)としても、図3(a)の矢印AR01に示すようにエンジントルクTeはThからTcへと低下する。そうすると、図3(b)の矢印AR02に示すように実際のエンジン出力Peが低下する。このようなことから、エンジン12の暖機過程(冷間時)においては、上記目標エンジン出力(エンジン指示出力)Petに対して実際のエンジン出力Peが追従できずに不足することがあるので、本実施例の電子制御装置58は、上記暖機過程を含むエンジン12の暖機が未完了である場合には、実際のエンジン出力Peを目標エンジン出力Petに一致させるようにするために、エンジン出力Peを補正する。具体的には、後述の図8に示すように補正エンジン出力ΔPeとエンジン温度TEMPegとの関係が予め実験的に求められ設定されており、その予め設定された関係から、電子制御装置58は、エンジン温度TEMPegに基づいて、エンジン出力Peの補正量としての上記補正エンジン出力ΔPeを決定する。そして、スロットル開度θthを拡大させるなどして、その補正エンジン出力ΔPeをエンジン12に追加的に出力させることで、上記エンジン出力Peを補正する。従って、本実施例では、例えば前記暖機過程においても、エンジン12は、目標エンジン出力Petに一致するようにエンジン出力Peを発生させることになる。なお、前記エンジン温度TEMPegは、本実施例ではエンジン12の冷却水温TEMPwで表されるが、その冷却水温TEMPwに替えて前記エンジンオイルの油温TEMPOilで表されても差し支えない。
【0042】
図4〜図6は、前記EHV走行モードにおいてエンジン制御に用いられるエンジン動作曲線について説明するための図である。詳細には、図4は、エンジン12の暖機完了後においてエンジン制御に用いられるエンジン動作曲線を表した図である。図5は、その暖機完了後のエンジン動作曲線と共に、エンジン12の暖機過程においてエンジン制御に用いられるエンジン動作曲線を表した図である。図6は、上記暖機完了後および暖機過程において用いられるエンジン動作曲線と前記エンジン温度TEMPegとの関係を説明するための図である。図4および図5にて破線で表された曲線は、エンジン出力Peが等しい点を連ねた等エンジン出力線である。
【0043】
本実施例では、エンジン12の暖機完了後および暖機過程において用いられる上記エンジン動作曲線は、同じエンジン出力Peを得るとした場合にエンジン12の燃費が最も良くなるようにそのエンジン12を作動させるエンジン燃費最適線(エンジン燃費最適ライン)である。そして、図4および図5に示すエンジン12の熱効率が等しい点を連ねた等熱効率線は、エンジン温度TEMPegが低下するほど低エンジントルク方向にずれるものである。そのため、上記暖機過程において用いられるエンジン動作曲線すなわちエンジン燃費最適ラインは、例えば図6に示すように、上記暖機完了後において用いられるエンジン動作曲線よりも低エンジントルク側の範囲で、エンジン温度TEMPegが低いほど低エンジントルク方向にずれることになる。このようなエンジン動作曲線(エンジン燃費最適ライン)とエンジン温度TEMPegとの関係は、予め実験的に求められており、エンジン動作曲線マップとして、電子制御装置58に予め記憶されている。そして、電子制御装置58は、前記EHV走行モードにおいては、エンジン温度TEMPegに基づいて上記エンジン動作曲線マップからエンジン動作曲線を選択し、その選択して予め設定したエンジン動作曲線に従ってエンジン12を制御する。
【0044】
ところで、前記EHV走行モードにおいてエンジン12の暖機過程では、図5および図6に示すように、前記エンジン動作曲線がエンジン12の暖機完了後よりも低エンジントルク側に設定されるが、更なる燃費向上のため、本実施例ではそれに加えて、上記暖機過程では、エンジン出力Peと電動機MGの出力Pmg(以下、電動機出力Pmgという)との和である駆動用総出力Pemに対するエンジン出力割合RPeが、上記暖機完了後よりも小さくされる。このような上記暖機過程におけるエンジン12の出力制御を行うための制御機能の要部について図7を用いて、次に説明する。なお、図7で説明される制御機能は前記EHV走行モードで行われる制御に関するものであるので、その前提としてエンジン断続用クラッチK0は係合されている。また、前記暖機完了後における前記駆動用総出力Pemに対する電動機MGの出力割合RPmg(以下、電動機出力割合RPmgという)およびエンジン出力割合RPeは、予め実験的に設定されている。
【0045】
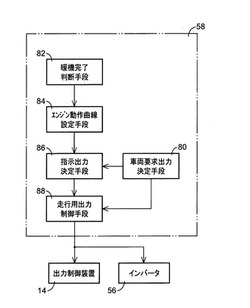
図7は、前記電子制御装置58に備えられた制御機能の要部を説明するための機能ブロック線図である。図7に示すように、電子制御装置58は、車両要求出力決定部としての車両要求出力決定手段80と、暖機完了判断部としての暖機完了判断手段82と、エンジン動作曲線設定部としてのエンジン動作曲線設定手段84と、指示出力決定部としての指示出力決定手段86と、走行用出力制御部としての走行用出力制御手段88とを備えている。
【0046】
車両要求出力決定手段80は、車両8に対し要求される要求出力Preq(単位は例えばkW)を逐次決定する。具体的には、車両要求出力決定手段80は、運転者が車両8に要求する出力要求量に相当するアクセル開度Accと車速Vとに基づいて、予め実験的に設定された関係から、その車両8の要求出力Preqすなわち車両要求パワーPreqを決定する。例えば、アクセル開度Accが大きいほど、運転者はより大きな駆動輪出力を要求していることになるので、上記車両要求パワーPreqは大きく決定される。要するに、車両要求パワーPreqとは、エンジン出力Peと電動機出力Pmgとの合計の目標値、言い換えれば、走行用駆動力源の出力合計の目標値である。
【0047】
暖機完了判断手段82は、前記エンジン温度TEMPegに基づいて、エンジン12の暖機が完了したか否かを逐次判断する。具体的には、その暖機の完了を判定するための暖機完了判定温度TEMP1が予め実験的に設定されており、暖機完了判断手段82は、エンジン温度TEMPegが暖機完了判定温度TEMP1以上か否かを逐次判断する。そして、エンジン温度TEMPegが暖機完了判定温度TEMP1以上であれば、エンジン12の暖機が完了したと判断する。このエンジン12の暖機が完了したという判断がなされた後は、エンジン12の暖機完了後である。
【0048】
エンジン動作曲線設定手段84は、エンジン12の制御に用いられる前記エンジン動作曲線を選択する。例えば図6に実線で示すように、前記暖機完了後のエンジン動作曲線はエンジン温度TEMPegに拘らず定まっているので特に選択する必要はないが、前記暖機過程のエンジン動作曲線は、図6に一点鎖線または二点鎖線で示すように、エンジン温度TEMPegに応じて異なるものとなる。そのため、エンジン動作曲線設定手段84は、暖機完了判断手段82によりエンジン12の暖機が完了していないと判断された場合には、エンジン温度TEMPegに基づいて前記エンジン動作曲線マップから前記エンジン動作曲線を選択し設定する。具体的には図6に示すように、エンジン動作曲線設定手段84は、エンジン12の暖機過程では、前記エンジン動作曲線をエンジン12の暖機完了後よりも低エンジントルク側に設定する。詳細に言えば、その暖機過程では、前記エンジン動作曲線から定まるアイドリング回転速度Neidl(図6参照)をエンジン12の暖機完了後のアイドリング回転速度Neidlに一致させるようにしつつ、エンジン温度TEMPegが低いほど、エンジン制御に用いるエンジン動作曲線をより低エンジントルク側に設定する。
【0049】
また、エンジン温度TEMPegが低いほど上記エンジン動作曲線が低エンジントルク側にずれる前記暖機過程に対応するエンジン温度範囲よりも更に低温側の温度範囲では、蓄電装置57から電動機MGが受ける電力が低温により制限される可能性があるので、上記エンジン動作曲線は、前記エンジン燃費最適ラインとは一致しなくなるが、その低温に起因した電力制限を加味して設定される。具体的には、前記暖機完了判定温度TEMP1を上限温度とする上記エンジン12の暖機過程に対応したエンジン温度TEMPegの範囲WTemd(以下、エンジン暖機過程温度範囲WTemdという)が予め実験的に定められており、更に、そのエンジン暖機過程温度範囲WTemdの下限温度よりも低温側のエンジン低温温度範囲WTeloが予め実験的に定められている。そして、エンジン動作曲線設定手段84は、エンジン温度TEMPegが上記エンジン低温温度範囲WTelo内である場合には、エンジン暖機過程温度範囲WTemdの下限温度に対応するエンジン動作曲線と前記暖機完了後のエンジン動作曲線との間で、エンジン温度TEMPegが低いほど、エンジン制御に用いるエンジン動作曲線をより高エンジントルク側に設定する。このようにすることにより、上記エンジン低温温度範囲WTeloにおいてエンジン温度TEMPegが低いほど、前記エンジン出力割合RPeを大きくすることができる。なお、本実施例では、エンジン温度TEMPegが上記エンジン低温温度範囲WTelo内にあるときのエンジン12の状態を、エンジン12の低温状態と呼ぶ。
【0050】
指示出力決定手段86は、前記車両要求パワーPreqとエンジン動作曲線設定手段84により選択され予め設定されたエンジン動作曲線とに基づいて、前記エンジン指示出力Petと電動機MGに対する出力指示値である電動機指示出力Pmgtとを逐次決定する。例えばエンジン12の暖機過程では、先ず、予め設定されている前記暖機完了後のエンジン出力割合RPeと前記車両要求パワーPreqとに基づいて、その暖機完了後を想定した基準エンジン指示出力Pet-h(=Preq×RPe)を算出する。その基準エンジン指示出力Pet-hを表す等エンジン出力線は、図5において破線L02で示されている。次に、指示出力決定手段86は、前記暖機完了後のエンジン動作曲線上で上記算出した基準エンジン指示出力Pet-hを発生させるエンジン動作点を求める。すなわち、図5において上記暖機完了後のエンジン動作曲線(図5の実線L03)と前記破線L02との交点hを求める。そして、前記エンジン動作曲線設定手段84により選択された前記暖機過程のエンジン動作曲線(図5の二点鎖線L04)上で、その交点hと同じエンジン回転速度Neとなるエンジン動作点(図5の点c’)を求める。指示出力決定手段86は、このエンジン動作点(点c’)が示すエンジン出力Peを、前記暖機過程におけるエンジン指示出力Petとして決定する。そして、前記車両要求パワーPreqから上記エンジン指示出力Petを差し引いて得た出力を前記電動機指示出力Pmgtとして決定する。このようにして電動機指示出力Pmgtが決定されるので、後述の走行用出力制御手段88は、実際のエンジン出力Peと電動機出力Pmgとの和である前記駆動用総出力Pemが上記車両要求パワーPreqとなるように、電動機MGを作動させることになる。なお、前記エンジン12の低温状態においても上記暖機過程の場合と同様にして、エンジン指示出力Petと電動機指示出力Pmgtとを決定する。
【0051】
走行用出力制御手段88は、指示出力決定手段86により決定されたエンジン指示出力Petと電動機指示出力Pmgtとを、エンジン12と電動機MGとにそれぞれ逐次出力させる。すなわち、上記エンジン指示出力Petおよび電動機指示出力Pmgtが、エンジン動作曲線設定手段84により予め設定されたエンジン動作曲線に基づいて決定されるので、走行用出力制御手段88は、その予め設定されたエンジン動作曲線に従ってエンジン12を制御する。例えばエンジン12の暖機過程において、上記のように図5のエンジン動作点c’に基づいてエンジン指示出力Petが決定されたのであれば、その点c’が示すエンジントルクTeが目標エンジントルクTetであり、走行用出力制御手段88は、その目標エンジントルクTetを発生させるようにエンジン12を制御する。
【0052】
また、走行用出力制御手段88は、エンジン指示出力Petと電動機指示出力Pmgtとに基づいてエンジン12と電動機MGとを作動させてもなお、車両要求パワーPreqに対して実際の駆動用総出力Pemが出力差を有する場合には、その出力差を零に近付けるようにフィードバック制御でエンジン出力Peと電動機出力Pmgとの一方または両方を微調整する。例えば、上記出力差は、トルクコンバータ16の速度比、または、車両8の加速度などから求められる。
【0053】
図8は、所定の車両要求パワーPreqに一致するように駆動用総出力Pemが発生させられた場合において、エンジン温度TEMPegに応じたその駆動用総出力Pemの内訳を模式的に表した図である。図9は、エンジン12の前記暖機完了後、前記暖機過程、前記低温状態のそれぞれの場合において、その図8に示される駆動用総出力Pemの内訳を棒グラフで例示した図である。この図8および図9では、前記暖機完了判定温度TEMP1はT0〔℃〕であり、前記エンジン暖機過程温度範囲WTemdはT1〜T0〔℃〕であり、前記エンジン低温温度範囲WTeloはT2〜T1〔℃〕である。図8および図9では、例えば車両要求パワーPreqを1としたときのエンジン出力Pe(=Peo+ΔPe)がエンジン出力割合RPeに相当し、その車両要求パワーPreqを1としたときの電動機出力Pmg(=Pmb+ΔPm)が電動機出力割合RPmgに相当する。そして、図8にて、エンジン温度TEMPegを前記暖機完了後と仮定したときのエンジン指示出力Pet(=Pe)が、前記基準エンジン指示出力Pet-hである。なお、図9のMGとは、電動機MGを意味している。
【0054】
図8に示すように、前記暖機完了後においては、エンジン出力Peはエンジン指示出力Petに対して不足せず、前記補正エンジン出力ΔPeは不要であるので、エンジン出力Peの内訳は、エンジン指示出力Petに対するエンジン実出力Peo(以下、指示出力対応エンジン実出力Peoという)だけである。要するに、エンジン出力Pe(=Peo)は、補正エンジン出力ΔPe無しで、エンジン指示出力Petに一致している。図8に示す基準電動機出力Pmbは、予め設定されている前記暖機完了後の電動機出力割合RPmgに対応した電動機出力Pmgであり、エンジン温度TEMPegの関数にはなっていない。
【0055】
また、エンジン12の暖機過程および低温状態では、エンジン出力Peがエンジン指示出力Petに対して不足することがあるので、エンジン出力Peは、前記指示出力対応エンジン実出力Peoと前記補正エンジン出力ΔPeとを併せたものとなっている。要するに、図8および図9ではエンジン出力Peは、補正エンジン出力ΔPeによって、エンジン指示出力Petに一致したものとなっている。上記暖機過程における上記指示出力対応エンジン実出力Peoに対応したエンジン動作点を、例えば図5に表すとすれば点cになる。
【0056】
そして、図5においてエンジン動作点c’が示すエンジン出力Peの方がエンジン動作点hが示すエンジン出力Peよりも小さいことから判るように、上記暖機過程および上記低温状態では、エンジン出力割合RPeは前記暖機完了後よりも小さくされるので、それを補うために、図8に示すように、前記基準電動機出力Pmbに電動機出力加算分ΔPmが加算されたものが電動機出力Pmgとなっている。すなわち、上記暖機過程および上記低温状態では、エンジン動作曲線設定手段84が前記エンジン動作曲線をエンジン12の暖機完了後よりも低エンジントルク側にずらして設定するため、走行用出力制御手段88は、図8に示すように、エンジン出力Peと電動機出力Pmgとの和に対する前記エンジン出力割合RPeを上記暖機完了後よりも小さくすることになる。更に詳しく言えば、上記暖機過程では、エンジン動作曲線設定手段84が、エンジン温度TEMPegが低いほどエンジン動作曲線を低エンジントルク側にずらすので、それに起因して、走行用出力制御手段88は、図8に示すように、エンジン温度TEMPegが低いほど上記エンジン出力割合RPeを小さくする。その一方で、上記低温状態では、エンジン動作曲線設定手段84が、エンジン温度TEMPegが低いほどエンジン動作曲線を高エンジントルク側にずらすので、それに起因して、走行用出力制御手段88は、図8に示すように、エンジン温度TEMPegが低いほど上記エンジン出力割合RPeを大きくする。
【0057】
また、図9に示すように、エンジン12の低温状態では、エンジン12の暖機過程と比較してより低温であるので、エンジン出力Pe全体に占める補正エンジン出力ΔPeの比率が大きくなっている。
【0058】
また、上記低温状態においてエンジン動作曲線が、前記暖機完了後のエンジン動作曲線(例えば図5の実線L03)を超えて高エンジントルク側にずらされることはないので、基本的に電動機出力Pmgが前記基準電動機出力Pmbを下回ることはない。しかし、低温に起因した蓄電装置57の出力制限によって電動機MGに基準電動機出力Pmbを発生させることができないときには、図8の一点鎖線L05のように、電動機出力Pmgが基準電動機出力Pmbを下回って電動機MGが駆動されると共に、その電動機出力Pmgの不足分をエンジン出力Peで補っても差し支えない。
【0059】
図10は、電子制御装置58の制御作動の要部、すなわち、エンジン12の暖機過程においてエンジン12の出力制御を行う制御作動を説明するためのフローチャートであり、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。この図10に示す制御作動は、単独で或いは他の制御作動と並列的に実行される。また、図10に示す制御作動は、前記EHV走行モードでの車両走行中に実行される。
【0060】
先ず、図10のステップ(以下、「ステップ」を省略する)SA1では、車両8の要求出力Preqすなわち車両要求パワーPreqが、例えばアクセル開度Acc等に基づいて決定される。SA1の次はSA2に移る。なお、SA1は車両要求出力決定手段80に対応する。
【0061】
暖機完了判断手段82に対応するSA2においては、エンジン12の暖機が完了したか否かが判断される。具体的には、エンジン温度TEMPegが前記暖機完了判定温度TEMP1以上である場合に、エンジン12の暖機が完了したと判断される。このSA2の判断が肯定された場合、すなわち、エンジン12の暖機が完了した場合には、本フローチャートは終了する。一方、このSA2の判断が否定された場合には、SA3に移る。
【0062】
エンジン動作曲線設定手段84に対応するSA3においては、エンジン12の制御に用いられる前記エンジン動作曲線が、エンジン温度TEMPegに基づいて前記エンジン動作曲線マップから選択される。SA3の次はSA4に移る。
【0063】
指示出力決定手段86に対応するSA4においては、前記エンジン指示出力Petと前記電動機指示出力Pmgtとが、SA1にて決定された車両要求パワーPreqとSA3にて選択された前記エンジン動作曲線とに基づいて決定される。SA4の次はSA5に移る。
【0064】
走行用出力制御手段88に対応するSA5においては、エンジン12が、SA4にて決定されたエンジン指示出力Petを発生させるように駆動される。それと共に、電動機MGが、SA4にて決定された電動機指示出力Pmgtを発生させるように駆動される。SA5の次はSA6に移る。
【0065】
走行用出力制御手段88に対応するSA6においては、実際の駆動用総出力Pemの車両要求パワーPreqに対する過不足分を零に近付けるように、エンジン出力Peと電動機出力Pmgとの一方または両方が、前記フィードバック制御で微調整される。
【0066】
本実施例では次のような効果(A1)乃至(A5)がある。(A1)本実施例によれば、走行用出力制御手段88は、エンジン12の暖機過程では、前記エンジン出力割合RPeをエンジン12の暖機完了後よりも小さくし、エンジン出力Peと電動機出力Pmgとの和である前記駆動用総出力Pemが前記車両要求パワーPreqとなるように電動機MGを作動させる。そのため、エンジン12の暖機過程では、そのエンジン12の暖機完了後と比較して、エンジン12の冷却による熱損失が拡大するところ、その冷却による熱損失が抑えられる。従って、エンジン12の暖機過程における車両8の燃費悪化を抑制することができる。
【0067】
(A2)また、本実施例によれば、エンジン12の暖機過程では、走行用出力制御手段88は、図8に示すように、エンジン温度TEMPegが低いほどエンジン出力割合RPeを小さくする。従って、エンジン12の冷却による熱損失がエンジン温度TEMPegが低いほど拡大するのに合わせて、車両8の燃費悪化を抑制できるように、エンジン出力Peを過不足なく得ることが可能である。
【0068】
(A3)また、本実施例によれば、走行用出力制御手段88は、予め設定されたエンジン動作曲線に従ってエンジン12を制御しており、エンジン動作曲線設定手段84は、エンジン12の暖機過程では、図5,図6に示すように、上記エンジン動作曲線をエンジン12の暖機完了後よりも低エンジントルク側に設定する。ここで、エンジン12の熱効率の良い作動領域はエンジン温度TEMPegが低いほど低エンジントルク側にずれる。従って、エンジン12の暖機過程では、その熱効率の良い作動領域のずれに合わせて上記エンジン動作曲線が設定されることになり、エンジン12を燃費良く作動させることができる。
【0069】
(A4)また、本実施例によれば、エンジン動作曲線設定手段84は、エンジン12の暖機過程では、前記エンジン動作曲線から定まるアイドリング回転速度Neidl(図6参照)をエンジン12の暖機完了後のアイドリング回転速度Neidlに一致させるようにしつつ、エンジン温度TEMPegが低いほど、エンジン制御に用いるエンジン動作曲線をより低エンジントルク側に設定する。従って、上記暖機過程において、エンジン温度TEMPegに応じた熱効率の良い領域でエンジン12を作動させ、車両12の燃費悪化を抑制することが可能である。例えば図11において矢印AR03で示すように、エンジン12の暖機過程で用いられる前記エンジン動作曲線が、前記暖機完了後よりも高エンジン回転速度側にずらされ、エンジン温度TEMPegが低いほど高エンジン回転速度側にずらされて設定されるものとした場合と比較して、本実施例の電子制御装置58は、車両12の燃費悪化を抑制することが可能である。具体的には、本実施例における前記暖機過程でのエンジン動作曲線の設定(図6参照)では、エンジン12の中高負荷領域において、エンジン12が低トルク化されるので、エンジン冷却水へ移る熱量が減りエンジン12の冷却損失が低減されて、上記燃費悪化を抑制することが可能である。また、エンジン12の低負荷領域おいて、エンジン12が高回転化させられるものではないので、エンジン12のフリクション増大が回避され、上記燃費悪化を抑制することが可能である。また、前記暖機過程でのアイドリング回転速度Neidlが前記暖機完了後と変わらないので、その暖機過程においてアイドリング時の燃料消費が増えることなく、上記燃費悪化を抑制することが可能である。
【0070】
(A5)また、本実施例によれば、エンジン12の暖機過程に対応して予め定められた前記エンジン暖機過程温度範囲WTemdの下限温度よりも低温側の前記エンジン低温温度範囲WTelo(図8参照)では、エンジン動作曲線設定手段84は、上記エンジン暖機過程温度範囲WTemdの下限温度に対応するエンジン動作曲線と前記暖機完了後のエンジン動作曲線との間で、エンジン温度TEMPegが低いほど、エンジン制御に用いるエンジン動作曲線をより高エンジントルク側に設定する。これにより、走行用出力制御手段88は、上記エンジン低温温度範囲WTeloでは、図8に示すように、エンジン温度TEMPegが低いほどエンジン出力割合RPeを大きくする。従って、蓄電装置57などの電力供給源から電動機MGが受ける電力が低温により制限されたとしても、エンジン12および電動機MGが出力不足にならないようにそれらを作動させることが可能である。
【0071】
次に、本発明の他の実施例について説明する。なお、以下の実施例の説明において、実施例相互に重複する部分については、同一の符号を付してその説明を省略する。
【実施例2】
【0072】
図12は、本発明が適用される車両用駆動装置208を説明するための骨子図である。図12に示すように、車両用駆動装置208は、走行用の動力を出力する一般的に知られた自動車用ガソリンエンジンまたはディーゼルエンジンであるエンジン12と、そのエンジン12と駆動輪240(図13参照)との間に介装された車両用動力伝達装置210(以下、「動力伝達装置210」という)とを備えている。動力伝達装置210はエンジン12からの駆動力を駆動輪240に伝達するトランスアクスルである。そして、動力伝達装置210は、車体に取り付けられる非回転部材としてのトランスアクスル(T/A)ケース212(以下、「ケース212」という)内において、エンジン12側から順番に、そのエンジン12の出力軸であるエンジン出力軸26(例えばクランク軸)に作動的に連結されてエンジン12からのトルク変動等による脈動を吸収するダンパー216、そのダンパー216を介してエンジン12によって回転駆動させられる入力軸218、第1電動機MG1、動力分配機構として機能する第1遊星歯車装置220、減速装置として機能する第2遊星歯車装置222、および、駆動輪240に動力伝達可能に連結された第2電動機MG2を備えている。
【0073】
この動力伝達装置210は、例えば前輪駆動すなわちFF(フロントエンジン・フロントドライブ)型の車両206の前方に横置きされ、駆動輪240を駆動するために好適に用いられるものである。動力伝達装置210では、エンジン12の動力がカウンタギヤ対232の一方を構成する動力伝達装置210の出力回転部材としての出力歯車224からカウンタギヤ対232、ファイナルギヤ対234、差動歯車装置(終減速機)236および一対の車軸238等を順次介して一対の駆動輪240へ伝達される(図13参照)。このように、本実施例では、入力軸218とエンジン12とはダンパー216を介して作動的に連結されており、エンジン出力軸26がエンジン12の出力回転部材であることはもちろんであるが、この入力軸218もエンジン12の出力回転部材に相当する。図12に示されているように、車両用駆動装置208はトルクコンバータのような流体伝動装置を備えていない。
【0074】
入力軸218は、両端がボールベアリング226および228によって回転可能に支持されており、一端がダンパー216を介してエンジン12に連結されることでエンジン12により回転駆動させられる。また、他端には潤滑油供給装置としてのオイルポンプ230が連結されており入力軸218が回転駆動されることによりオイルポンプ230が回転駆動させられて、動力伝達装置210の各部例えば第1遊星歯車装置220、第2遊星歯車装置222、ボールベアリング226、および228等に潤滑油が供給される。
【0075】
第1遊星歯車装置220は、エンジン12と駆動輪240との間の動力伝達経路の一部を構成しており、エンジン12からの動力を駆動輪240へ出力する差動機構である。そして、第1遊星歯車装置220は、第1電動機MG1により差動状態が制御される電気式差動機構として機能する。具体的に、第1遊星歯車装置220は、シングルピニオン型の遊星歯車装置であり、第1サンギヤS1、第1ピニオンギヤP1、その第1ピニオンギヤP1を自転および公転可能に支持する第1キャリヤCA1、および、第1ピニオンギヤP1を介して第1サンギヤS1と噛み合う第1リングギヤR1を回転要素(要素)として備えている。第1遊星歯車装置220のギヤ比ρ1は、第1サンギヤS1の歯数をZS1とし第1リングギヤR1の歯数をZR1とすれば、「ρ1=ZS1/ZR1」で算出される。
【0076】
そして、第1遊星歯車装置220は、入力軸218に伝達されたエンジン12の出力を機械的に分配する機械的な動力分配機構であって、エンジン12の出力を第1電動機MG1および出力歯車224に分配する。つまり、この第1遊星歯車装置220においては、第1回転要素としての第1キャリヤCA1は入力軸218すなわちエンジン12に連結され、第2回転要素としての第1サンギヤS1は第1電動機MG1に連結され、第3回転要素としての第1リングギヤR1は出力歯車224すなわちその出力歯車224に作動的に連結された駆動輪240に連結されている。これより、第1サンギヤS1、第1キャリヤCA1、第1リングギヤR1は、それぞれ相互に相対回転可能となることから、エンジン12の出力が第1電動機MG1および出力歯車224に分配されると共に、第1電動機MG1に分配されたエンジン12の出力で第1電動機MG1が発電され、その発電された電気エネルギが蓄電されたりその電気エネルギで第2電動機MG2が回転駆動されるので、動力伝達装置210は、例えば無段変速状態(電気的CVT状態)とされて、第1遊星歯車装置220の差動状態が第1電動機MG1により制御されることにより、エンジン12の所定回転に拘わらず出力歯車224の回転が連続的に変化させられる電気的な無段変速機として機能する。また、第1遊星歯車装置220では、第1電動機MG1が無負荷状態とされて空転させられることで第1キャリヤCA1と第1リングギヤR1との間の動力伝達が遮断されるので、第1遊星歯車装置220は、エンジン12と駆動輪240との間の動力伝達を遮断可能な動力伝達遮断装置としても機能する。
【0077】
第2遊星歯車装置222は、シングルピニオン型の遊星歯車装置である。第2遊星歯車装置222は、第2サンギヤS2、第2ピニオンギヤP2、その第2ピニオンギヤP2を自転および公転可能に支持する第2キャリヤCA2、および、第2ピニオンギヤP2を介して第2サンギヤS2と噛み合う第2リングギヤR2を回転要素として備えている。なお、第1遊星歯車装置220のリングギヤR1および第2遊星歯車装置222のリングギヤR2は一体化された複合歯車となっており、その外周部に出力歯車224が設けられている。そのため、本実施例では、リングギヤR1の回転速度Nr1とリングギヤR2の回転速度Nr2と出力歯車224の回転速度Noutとは互いに同一である。
【0078】
この第2遊星歯車装置222においては、第2キャリヤCA2は非回転部材であるケース212に連結されることで回転が阻止され、第2サンギヤS2は第2電動機MG2に連結され、第2リングギヤR2は出力歯車224に連結されている。すなわち、第2電動機MG2は出力歯車224と第1遊星歯車装置220のリングギヤR1とに第2遊星歯車装置222を介して連結されている。これにより、例えば発進時などは第2電動機MG2が回転駆動することにより、第2サンギヤS2が回転させられ、第2遊星歯車装置222によって減速させられて出力歯車224に回転が伝達される。
【0079】
本実施例の第1電動機MG1及び第2電動機MG2は何れも、発電機能をも有する所謂モータジェネレータである。具体的に第1電動機MG1及び第2電動機MG2は、周方向に配設された複数の永久磁石と回転軸とを含むロータと、回転軸心まわりに回転磁界を形成する三相コイルが巻回された非回転部材のステータとを備えた同期電動発電機である。第1電動機MG1及び第2電動機MG2では、上記複数の永久磁石が発生させる磁界と上記三相コイルが発生させる磁界との相互作用により上記ロータが回転駆動され、或いは、それらの相互作用により上記三相コイルの端子間に起電力が生じさせられる。このような構成から、第1電動機MG1及び第2電動機MG2は、上記三相コイルに通電される駆動電流が大きいほど、大きなトルクを発生させる。第1電動機MG1及び第2電動機MG2はそれぞれインバータ56(図13参照)を介して蓄電装置57に電気的に接続されており、第1電動機MG1と第2電動機MG2と蓄電装置57とは相互に電力授受可能な構成となっている。差動用電動機として機能する第1電動機MG1は反力を発生させるためのジェネレータ(発電)機能を少なくとも備えている。また、走行用電動機として機能する第2電動機MG2は車両206の駆動力を出力するためのモータ(電動機)機能を少なくとも備えており、駆動輪240へ走行用の動力を出力する。上記蓄電装置57は、例えば、鉛蓄電池などのバッテリ(二次電池)又はキャパシタなどであって、第1電動機MG1及び第2電動機MG2に電力を供給し且つそれらの各電動機MG1,MG2から電力の供給を受けることが可能な電気エネルギ源である。
【0080】
上述のように構成された車両用駆動装置208では、電子制御装置258(図13参照)は、例えば、キーがキースロットに挿入された後、フットブレーキ244が操作された状態でパワースイッチが操作されることにより制御が起動されると、アクセルペダル71(図13参照)の操作に応じて駆動力を発生させる。例えば、電子制御装置258は、エンジン12を停止し専ら第2電動機MG2を駆動源とするモータ走行モード(EV走行モード)、エンジン12の動力を機械的に駆動輪240に伝えて走行するEHV走行モード等を、走行状態に応じて切り換える。そのEHV走行モードでは、エンジン12と共に第2電動機MG2も必要に応じて駆動状態とされて第2電動機MG2がアシストトルクを出力することがある。
【0081】
また、電子制御装置258は、上記EHV走行モードでは、エンジン12が例えば前記エンジン燃費最適ライン等の予め定められたエンジン動作曲線に従って作動するように第1電動機MG1によってエンジン12の回転速度Ne(以下、エンジン回転速度Neという)を制御する。このとき、電子制御装置258は、エンジン回転速度Neの制御及び第1電動機MG1の発電量の制御に伴い、第1遊星歯車装置220の変速比γ0(=入力軸218の回転速度/出力歯車224の回転速度)をその変速可能な変化範囲内で無段階に制御する。すなわち、第1電動機MG1により第1遊星歯車装置220の差動状態を連続的に制御する。
【0082】
また、後進走行は、例えば、第2電動機MG2を逆方向へ回転駆動することによって達成される。このとき、電子制御装置258は、第1電動機MG1は空転状態として、エンジン12の作動状態に関係なく出力歯車224が逆回転することを許容する。
【0083】
さらに、電子制御装置258は、コースト走行時には車両206の有する慣性エネルギーで第2電動機MG2を回転駆動することにより電力として回生し、蓄電装置57にその電力を蓄える。
【0084】
また、電子制御装置258は、前記モータ走行モードでは、エンジン12の運転を停止した状態で蓄電装置57からの電力により第2電動機MG2を駆動してその第2電動機MG2のみを車両206の駆動力源とする。このモータ走行モードでは、運転を停止しているエンジン12の引き摺りを抑制して燃費を向上させるために、例えば第1電動機MG1を無負荷状態とすることにより空転させて、第1遊星歯車装置220の差動作用によりエンジン回転速度Neを零乃至略零に維持する。つまり、モータ走行モードでは、エンジン12の運転が単に停止させられるだけではなく、エンジン12の回転も停止させられる。
【0085】
図13は、本実施例の車両用駆動装置208を制御するための制御装置として機能する電子制御装置258に入力される信号を例示した図であると共に、電子制御装置258に備えられた制御機能の要部を説明するための機能ブロック線図である。この電子制御装置258は、CPU、ROM、RAM、及び入出力インターフェースなどから成る所謂マイクロコンピュータを含んで構成されており、RAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従って信号処理を行うことによりエンジン12、第1電動機MG1、第2電動機MG2に関するハイブリッド駆動制御等の車両制御を実行するものである。
【0086】
電子制御装置258には、図13に示すような各センサやスイッチなどから、エンジン12のシリンダブロックに設けられたエンジン水温センサ70からのエンジン水温TEMPwを表す信号、エンジン回転速度Neを表すエンジン回転速度センサ64からの信号、出力歯車224の回転速度Nout(以下、「出力回転速度Nout」という)に対応する車速Vを表す車速センサ252からの信号、常用ブレーキであるフットブレーキ244の操作の有無を検出するためのブレーキスイッチ246からのフットブレーキ操作を表す信号、アクセルペダル71の操作量であるアクセル開度Accを表すアクセル開度センサ60からの信号、エンジン12の吸気管に設けられエンジン12の吸入空気量を電動で調節する電子スロットル弁のスロットル開度θthを表すスロットル弁開度センサ242からの信号、第1電動機MG1の回転速度Ng(以下、「第1電動機回転速度Ng」という)を表す信号、第2電動機MG2の回転速度Nm(以下、「第2電動機回転速度Nm」という)を表す信号、蓄電装置57の充電残量(充電状態)SOCを表す信号、シフトレバーの操作位置(操作ポジション)POPEを検出する為の位置センサであるレバー操作位置センサ248からの操作ポジションPOPEに応じたシフトレバー位置信号、第1電動機MG1のトルクTg(以下、「第1電動機トルクTg」という)に対応する第1電動機MG1の駆動電流を表す信号、第2電動機MG2のトルクTm(以下、「第2電動機トルクTm」という)に対応する第2電動機MG2の駆動電流を表す信号、水冷のインバータ56の温度すなわちインバータ水温TEMPinvを表す信号等が、それぞれ供給される。なお、第1電動機MG1が発電する際には、上記第1電動機MG1の駆動電流を第1電動機MG1の発電電流と呼んでもよい。
【0087】
また、電子制御装置258からは、エンジン出力を制御するエンジン出力制御のための制御信号例えば前記電子スロットル弁のスロットル開度θthを操作するスロットルアクチュエータへの駆動信号やエンジン12の燃料噴射装置による吸気管或いはエンジン12の筒内への燃料供給量を制御する燃料供給量信号やエンジン12の点火装置によるエンジン12の点火時期を指令する点火信号、各電動機MG1,MG2の作動を指令する指令信号等が、それぞれ出力される。電子制御装置258は、スロットル開度θthをアクセル開度Accに応じて調節するスロットル制御では、予め定められた関係に従ってアクセル開度Accが増加するほどスロットル開度θthを増加させる。そのスロットル開度θthの増加に伴いエンジン12に吸入される吸入空気量も増加する。
【0088】
図13に示すように、本実施例の電子制御装置258は、前述の実施例1の電子制御装置58と同様に、車両要求出力決定手段80と暖機完了判断手段82とエンジン動作曲線設定手段84とを備えており、その実施例1の指示出力決定手段86と走行用出力制御手段88とに替えて、指示出力決定部としての指示出力決定手段262と、走行用出力制御部としての走行用出力制御手段264とを備えている。なお、実施例1の走行用電動機である電動機MGには、本実施例の第2電動機MG2が相当するので、本実施例では、前記車両要求パワーPreqとは、エンジン出力Peと第2電動機MG2の出力Pm(以下、第2電動機出力Pmという)との合計の目標値である。また、前記エンジン出力割合RPeとは、エンジン出力Peと第2電動機出力Pmとの和に対するエンジン出力Peの割合である。また、前記電動機出力割合RPmgとは、エンジン出力Peと第2電動機出力Pmとの和に対する第2電動機出力Pmの割合である。また、第2電動機MG2に対する出力指示値である第2電動機指示出力Pmtは、実施例1の電動機指示出力Pmgtに対応する。
【0089】
指示出力決定手段262は、実施例1の指示出力決定手段86と同様に、前記車両要求パワーPreqとエンジン動作曲線設定手段84により選択され予め設定されたエンジン動作曲線とに基づいて、前記エンジン指示出力Petと前記第2電動機指示出力Pmtとを逐次決定する。ただ、エンジン12の暖機過程においてそのエンジン指示出力Petと第2電動機指示出力Pmtとを決定する方法が、上記実施例1の指示出力決定手段86とは異なるので、その異なる点に関して、図14を用いて説明する。図14は、図5と同様に前記エンジン動作曲線を表した図であって、本実施例におけるエンジン指示出力Petおよび第2電動機指示出力Pmtの決定方法を説明するための図である。図14において図5と共通する符号はその図5におけるものと同じものを表している。具体的に、指示出力決定手段262は、エンジン12の暖機過程では、先ず、予め設定されている前記暖機完了後のエンジン出力割合RPeと前記車両要求パワーPreqとに基づいて、その暖機完了後を想定した基準エンジン指示出力Pet-hを算出する。その基準エンジン指示出力Pet-hを表す等エンジン出力線は、図14において破線L02で示されている。次に、指示出力決定手段262は、前記暖機完了後のエンジン動作曲線上で上記算出した基準エンジン指示出力Pet-hを発生させるエンジン動作点を求める。すなわち、図14において上記暖機完了後のエンジン動作曲線(図14の実線L03)と前記破線L02との交点hを求める。この交点hを求めることまでに関しては上記実施例1の指示出力決定手段86と同様である。そして、指示出力決定手段262は、上記交点hであるエンジン動作点から、そのエンジン動作点(交点h)が示すエンジン回転速度N1を求める。このエンジン回転速度N1は、図14のような線図上で前記車両要求パワーPreqと前記暖機完了後のエンジン動作曲線(図14の実線L03)とから導き出されるので、その車両要求パワーPreqに基づいて想定される上記暖機完了後のエンジン回転速度、すなわち暖機後想定エンジン回転速度N1であると言える。指示出力決定手段262は、その暖機後想定エンジン回転速度N1を求めると、次に、予め実験的に定められた回転速度加算量ΔNe(>0)を上記暖機後想定エンジン回転速度N1に加えて得た値を暖機前エンジン回転速度N2として算出する。その回転速度加算量ΔNeは、例えば車両要求パワーPreqに応じて増減されても良いが、本実施例では零よりも大きい一定値とされており、前記暖機過程での殆どのエンジン温度範囲においてエンジン指示出力Petが前記基準エンジン指示出力Pet-hを下回って決定されるように設定されている。指示出力決定手段262は、上記暖機前エンジン回転速度N2を算出すると、前記エンジン動作曲線設定手段84により選択された前記暖機過程のエンジン動作曲線(図14の二点鎖線L04)上で、エンジン回転速度Neが上記暖機前エンジン回転速度N2となるエンジン動作点(図14の点c'')を求める。指示出力決定手段262は、このエンジン動作点(点c'')が示すエンジン出力Peを、前記基準エンジン指示出力Pet-hを超えない範囲内で、前記暖機過程におけるエンジン指示出力Petとして決定する。そして、前記車両要求パワーPreqから上記エンジン指示出力Petを差し引いて得た出力を前記第2電動機指示出力Pmtとして決定する。このようにして第2電動機指示出力Pmtが決定されるので、後述の走行用出力制御手段264は、実際のエンジン出力Peと第2電動機出力Pmとの和が上記車両要求パワーPreqとなるように、第2電動機MG2を作動させることになる。なお、前記エンジン12の低温状態においても上記暖機過程の場合と同様にして、エンジン指示出力Petと第2電動機指示出力Pmtとを決定する。
【0090】
走行用出力制御手段264は、実施例1の走行用出力制御手段88と同様に、指示出力決定手段262により決定されたエンジン指示出力Petと第2電動機指示出力Pmtとを、エンジン12と第2電動機MG2とにそれぞれ逐次出力させる。すなわち、上記エンジン指示出力Petおよび第2電動機指示出力Pmtが、エンジン動作曲線設定手段84により予め設定されたエンジン動作曲線に基づいて決定されるので、走行用出力制御手段264は、その予め設定されたエンジン動作曲線に従ってエンジン12を制御する。例えばエンジン12の暖機過程において、上記のように図14のエンジン動作点c''に基づいてエンジン指示出力Petが決定されたのであれば、その点c''が示すエンジントルクTeが目標エンジントルクTetであり、走行用出力制御手段264は、その目標エンジントルクTetを発生させるようにエンジン12を制御する。それと共に、走行用出力制御手段264は、その点c''が示すエンジン回転速度Neを目標エンジン回転速度Netとして、実際のエンジン回転速度Neをその目標エンジン回転速度Netに収束させるように第1電動機MG1により第1遊星歯車装置220の差動状態を制御する。例えば、走行用出力制御手段264は、エンジン出力Peを補正する際、すなわち、補正エンジン出力ΔPeを出力させる際に、第1電動機MG1を制御することにより、エンジン回転速度Neを図14の点cが示すN1から点c''が示すN2へと上昇させる。
【0091】
また、走行用出力制御手段264は、エンジン指示出力Petと第2電動機指示出力Pmtとに基づいてエンジン12と第2電動機MG2とを作動させてもなお、実際のエンジン出力Peと第2電動機出力Pmとの合計が車両要求パワーPreqに対して出力差を有する場合には、その出力差を零に近付けるようにフィードバック制御でエンジン出力Peと第2電動機出力Pmとの一方または両方を微調整する。
【0092】
前記EHV走行モードでは、以上のようにしてエンジン12等が制御されており、エンジン12の前記暖機過程および前記低温状態では、前述の実施例1と同様に、エンジン動作曲線設定手段84が前記エンジン動作曲線をエンジン12の暖機完了後よりも低エンジントルク側にずらして設定するので、走行用出力制御手段264は、図8に示すように、エンジン出力割合RPeを上記暖機完了後よりも小さくすることになる。そして、上記暖機過程では、エンジン動作曲線設定手段84が、エンジン温度TEMPegが低いほどエンジン動作曲線を低エンジントルク側にずらすので、それに起因して、走行用出力制御手段264は、図8に示すように、エンジン温度TEMPegが低いほどエンジン出力割合RPeを小さくする。その一方で、上記低温状態では、エンジン動作曲線設定手段84が、エンジン温度TEMPegが低いほどエンジン動作曲線を高エンジントルク側にずらすので、それに起因して、走行用出力制御手段264は、図8に示すように、エンジン温度TEMPegが低いほどエンジン出力割合RPeを大きくする。なお、本実施例でも、エンジン出力Pe(=Peo+ΔPe)および第2電動機出力Pm(=Pmb+ΔPm)の内訳は、実施例1で説明した図8および図9のようになっている。
【0093】
また、上述したように、指示出力決定手段262がエンジン12の暖機過程及び低温状態においてエンジン指示出力Petを決定する際には、例えば図14において点hであるエンジン動作点が示すエンジン回転速度N1よりも、エンジン指示出力Petに対応した点c''であるエンジン動作点が示すエンジン回転速度N2の方が高くされる。従って、そのエンジン指示出力Petに従ってエンジン12を制御する走行用出力制御手段264は、前記暖機過程及び低温状態では、エンジン回転速度Neが、前記車両要求パワーPreqに基づいて想定される前記暖機完了後のエンジン回転速度N1(暖機後想定エンジン回転速度N1)よりも高くなるように、エンジン出力Peを制御すると言える。
【0094】
図15は、本実施例の電子制御装置258の制御作動の要部、すなわち、エンジン12の暖機過程においてエンジン12の出力制御を行う制御作動を説明するためのフローチャートであり、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。この図15に示す制御作動は、単独で或いは他の制御作動と並列的に実行される。また、図15に示す制御作動は、前記EHV走行モードでの車両走行中に実行される。図15のSB1〜SB3は実施例1の図10のSA1〜SA3と同じ内容であるので、SB4から説明する。
【0095】
SB4においては、前記基準エンジン指示出力Pet-hが前記車両要求パワーPreqから算出される。この基準エンジン指示出力Pet-hを表す等エンジン出力線は、例えば図14において破線L02で示されている。そして、その基準エンジン指示出力Pet-hと前記暖機完了後のエンジン動作曲線とから、前記暖機後想定エンジン回転速度N1が求められる。更に、その暖機後想定エンジン回転速度N1に前記回転速度加算量ΔNeを加えて得た値が、前記暖機前エンジン回転速度N2として算出される。SB4の次はSB5に移る。
【0096】
SB5においては、SB4にて算出された暖機前エンジン回転速度N2と、SB3にて選択された前記エンジン動作曲線とに基づいて、エンジン指示出力Petが、前記基準エンジン指示出力Pet-hを超えない範囲内で決定される。そして、第2電動機指示出力Pmtが、そのエンジン指示出力PetとSB1にて決定された車両要求パワーPreqとに基づいて決定される。SB5の次はSB6に移る。なお、SB4およびSB5は指示出力決定手段262に対応する。
【0097】
走行用出力制御手段264に対応するSB6においては、SB5にて決定されたエンジン指示出力Petをエンジン12が発生させるように、エンジン12と第1電動機MG1とが作動させられる。それと共に、第2電動機MG2が、SB5にて決定された第2電動機指示出力Pmtを発生させるように作動させられる。SB6の次はSB7に移る。
【0098】
走行用出力制御手段264に対応するSB7においては、実際のエンジン出力Peと第2電動機出力Pmとの合計の車両要求パワーPreqに対する過不足分を零に近付けるように、エンジン出力Peと第2電動機出力Pmとの一方または両方が、前記フィードバック制御で微調整される。
【0099】
本実施例では、前述の実施例1の効果(A1)〜(A5)に加え、更に次のような効果(B1)がある。(B1)本実施例によれば、例えば図14に示すように、走行用出力制御手段264は、エンジン12の暖機過程では、エンジン回転速度Ne(=N2)が、前記車両要求パワーPreqに基づいて想定される前記暖機完了後のエンジン回転速度N1(暖機後想定エンジン回転速度N1)よりも高くなるように、エンジン出力Peを制御する。従って、第1電動機MG1の作動状態が上記想定される暖機完了後のエンジン回転速度N1を前提としたものと比較して発電側に変化するので、走行用駆動力源としての第2電動機MG2の出力を引き上げ易くなる。このことを具体的に説明するための図が図16および図17である。
【0100】
その図16は、低速から中速での車両走行時における第1遊星歯車装置220の差動状態を表した共線図であり、図16(a)は図14のエンジン動作点hでエンジン12が作動させられる場合の各回転要素の回転速度を表しており、図16(b)は図14のエンジン動作点c''でエンジン12が作動させられる場合の各回転要素の回転速度を表している。また、図17は、中速から高速での車両走行時における第1遊星歯車装置220の差動状態を表した共線図であり、図17(a)は図14のエンジン動作点hでエンジン12が作動させられる場合の各回転要素の回転速度を表しており、図17(b)は図14のエンジン動作点c''でエンジン12が作動させられる場合の各回転要素の回転速度を表している。図16、図17において、Tgは第1電動機トルクを表し、Teはエンジントルクを表し、Tmrは出力歯車224に伝達された第2電動機トルクTmである第2電動機換算トルクを表し、Tepは出力歯車224に伝達されたエンジントルクTeすなわちエンジン直達トルクを表している。また、以下の説明を簡潔にするため、図14のエンジン動作点hでエンジン12が作動させられる場合の各回転速度およびトルクを符号で表すときには、符号末尾に「-h」と付し、図14のエンジン動作点c''でエンジン12が作動させられる場合の各回転速度およびトルクを符号で表すときには、符号末尾に「-c''」と付すものとする。なお、図17は、第2電動機MG2が発電し第1電動機MG1が発動機として機能する動力循環状態で例示されているが、その動力循環状態ではなく、第1電動機回転速度Ngが正の値になっている共線図であってもよい。
【0101】
図14のエンジン動作点hとエンジン動作点c''とが示すエンジン回転速度Neを比較すれば判るように、図16および図17では、エンジン回転速度Neは「Ne-h≦Ne-c''」であるので、第1電動機回転速度Ngは「Ng-h≦Ng-c''」となっている。そのため、エンジン回転速度NeがN2であるときの方が、N1であるときと比較して、第1電動機MG1の発電量が増大している。
【0102】
このように、エンジン回転速度NeがN1からN2に引き上げられることで、図16に示す低速から中速での車両走行時には、第1電動機MG1の発電量が増大し、それが第2電動機MG2の出力アップを行い易くしている。また、図17に示す中速から高速での車両走行時には、第2電動機MG2が発電し第1電動機MG1が発動機として機能する動力循環状態で例示されているが、負方向の第1電動機回転速度Ngと負方向の第1電動機トルクTgとの絶対値が何れも減少する(零に近付く)ので、上記動力循環状態において第2電動機MG2から第1電動機MG1へ循環する電気エネルギ(電力)が少なくなっている。すなわち、図16、図17の何れの場合でも、走行用駆動力源としての第2電動機MG2の出力を引き上げ易くなっている。
【0103】
また、図14のエンジン動作点hとエンジン動作点c''とが示すエンジントルクTeを比較すれば判るように、図16および図17では、エンジントルクTeは「Te-h≧Te-c''」であるので、そのエンジントルクTeに対抗する反力トルクである第1電動機トルクTgは「Tg-h≧Tg-c''」であり、エンジン直達トルクTepは「Tep-h≧Tep-c''」となっている。そのため、第2電動機換算トルクTmrは「Tmr-h≦Tmr-c''」となり、エンジン回転速度NeがN2であるときの方が、N1であるときと比較して、第2電動機出力Pmが、駆動輪240を駆動する方向(正方向)に増大させられている。
【0104】
以上、本発明の実施例を図面に基づいて詳細に説明したが、これはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【0105】
例えば、前述の実施例1において、トルクコンバータ16が流体伝動装置として用いられているが、そのトルクコンバータ16のトルク増幅作用は必ずしも必要ではなく、そのトルクコンバータ16がトルク増幅作用のないフルードカップリングに置き換わっていても差し支えない。
【0106】
また、前述の実施例1において、トルクコンバータ16はロックアップクラッチLUを備えているが、そのロックアップクラッチLUを備えていなくても差し支えない。
【0107】
また、前述の実施例1において、自動変速機18は前記クラッチ・ツゥ・クラッチ変速を行う有段式の自動変速機構であるが、変速比を連続的に変化させることができる無段変速機(CVT)であっても差し支えない。
【0108】
また、前述の実施例1において、エンジン12はエンジン断続用クラッチK0を介してトルクコンバータ16のポンプ翼車16pに連結されているが、そのエンジン断続用クラッチK0が設けられておらず、エンジン12がポンプ翼車16pに常に連結されていても差し支えない。
【0109】
また、前述の実施例1,2において、図8に示すように、前記エンジン低温温度範囲WTeloでは、前記エンジン出力割合RPeはエンジン温度TEMPegが低いほど大きくされるが、エンジン温度TEMPegに寄らず一定であってもよいし、前記エンジン暖機過程温度範囲WTemdと同様に、前記エンジン出力割合RPeがエンジン温度TEMPegが低いほど小さくされても差し支えない。例えば、前記車両要求パワーPreqが、軽負荷を判断できるように予め実験的に設定された判定値よりも小さい場合には、電動機MGが低温に起因して出力不足になり難いので、前記エンジン出力割合RPeはエンジン温度TEMPegが低いほど小さくされても差し支えない。
【0110】
また、前述の実施例1において、図10のフローチャートにはSA6が設けられているが、そのSA6は必須ではない。また同様に、前述の実施例2において、図15のフローチャートのSB7も必須ではない。
【0111】
また、前述の実施例1,2において、図8において破線L06で車両要求パワーPreqを分割して示される前記エンジン出力割合RPeと前記電動機出力割合RPmgとは、エンジン動作曲線設定手段84により選択されるエンジン動作曲線に基づいて定まるが、エンジン回転速度Neなどの車両状態およびエンジン温度TEMPegをパラメータとして前記エンジン出力割合RPeと前記電動機出力割合RPmgとを定めた出力割合マップ(例えば図8)が予め設定されていてもよい。そのように上記出力割合マップが予め設定されている場合には、電子制御装置58,258は、その出力割合マップからエンジン温度TEMPegに基づいて決定したエンジン出力Peと電動機出力Pmg(第2電動機出力Pm)とを、フィードフォワード制御によりエンジン12と電動機MG(第2電動機MG2)とにそれぞれ出力させる。このようにしたとすれば、上記出力割合マップから決定したエンジン出力Peと電動機出力Pmg(第2電動機出力Pm)、すなわち、エンジン指示出力Petと電動機指示出力Pmgt(第2電動機指示出力Pmt)とが、車両要求パワーPreqから直ちに決まるので、電子制御装置58,258の制御負荷を軽減することが可能である。
【0112】
また、前述の実施例1,2において、エンジン12の暖機過程においてエンジン制御に用いられるエンジン動作曲線は、図6に示すように、エンジン温度TEMPegが低いほど低エンジントルク方向にずれるが、エンジン温度TEMPegに拘らず固定され、前記暖機完了後のものよりも低エンジントルク方向にずれたエンジン動作曲線であっても差し支えない。
【0113】
また、前述の実施例1,2において、エンジン12は、エンジン動作曲線設定手段84により選択されたエンジン動作曲線に従って制御されるが、エンジン12の暖機過程において前記エンジン出力割合RPeがエンジン12の暖機完了後よりも小さくされれば、ある程度の燃費向上効果があるので、エンジン12が上記エンジン動作曲線に従って制御されることは必須ではない。
【0114】
また、前述の実施例1,2の図8において、前記エンジン出力割合RPeはエンジン温度TEMPegに応じて連続的に変更されるが、段階的に変更されても差し支えない。例えば、前記暖機過程における前記エンジン出力割合RPeが、前記暖機完了後よりも小さい一定値であっても差し支えない。
【0115】
また、前述の実施例2の第1遊星歯車装置220において、第1キャリヤCA1はエンジン12に連結され、第1サンギヤS1は第1電動機MG1に連結され、第1リングギヤR1は出力歯車224に連結されているが、それらの連結関係は、必ずしもそれに限定されるものではなく、エンジン12、第1電動機MG1、出力歯車224は、それぞれ第1遊星歯車装置220の3つの回転要素CA1、S1、R1のうちのいずれと連結されていても差し支えない。
【0116】
また、前述の実施例2において、第2遊星歯車装置222のリングギヤR2は第1遊星歯車装置220のリングギヤR1に対し一体的に連結されているが、上記リングギヤR2の連結先は、上記リングギヤR1に限定されるものではなく、例えば第1遊星歯車装置220の第1キャリヤCA1に連結されていても差し支えない。また、上記リングギヤR2は、上記リングギヤR1ではなく第1遊星歯車装置220と駆動輪240との間の動力伝達経路のどこかに連結されていても差し支えない。
【0117】
また、前述の実施例2において、出力歯車224と駆動輪240との間の動力伝達経路に変速機は設けられていないが、その動力伝達経路に、手動変速機もしくは自動変速機が設けられていても差し支えない。
【0118】
また、前述の実施例2において、入力軸218はダンパー216を介してエンジン12に連結されているが、そのダンパー216が無く、入力軸218が直接に或いは伝動ベルトや歯車等を介してエンジン12に連結されていても差し支えない。
【0119】
また、前述の実施例2の動力伝達装置210において、エンジン12と第1遊星歯車装置220との間にクラッチ等の動力断続装置は設けられていないが、そのような動力断続装置がエンジン12と第1遊星歯車装置220との間に介装されていても差し支えない。また、第1電動機MG1及び第2電動機MG2に関しても同様であり、上記動力断続装置が、第1電動機MG1と第1遊星歯車装置220との間または第2電動機MG2と第2遊星歯車装置222との間に介装されていても差し支えない。
【0120】
また前述の実施例2においては、第1電動機MG1の運転状態が制御されることにより、第1遊星歯車装置220はその変速比が連続的に変化させられる電気的な無段変速機として機能するものであるが、例えば第1遊星歯車装置220の変速比を連続的ではなく差動作用を利用して敢えて段階的に変化させるものであってもよい。
【0121】
また、前述の実施例2において、第1遊星歯車装置220および第2遊星歯車装置222は何れもシングルプラネタリであるが、それらの一方または両方がダブルプラネタリであっても差し支えない。
【0122】
また前述の実施例2においては、第1遊星歯車装置220を構成する第1キャリヤCA1にはエンジン12が動力伝達可能に連結され、第1サンギヤS1には第1電動機MG1が動力伝達可能に連結され、第1リングギヤR1には駆動輪240への動力伝達経路が連結されているが、例えば、第1遊星歯車装置220が2つの遊星歯車装置に置き換えられて、その2つの遊星歯車装置がそれを構成する一部の回転要素で相互に連結された構成において、その遊星歯車装置の回転要素にそれぞれエンジン、電動機、駆動輪が動力伝達可能に連結されており、その遊星歯車装置の回転要素に連結されたクラッチ又はブレーキの制御により有段変速と無段変速とに切換可能な構成であってもよい。
【0123】
また、前述の実施例2の第2電動機MG2はエンジン12から駆動輪240までの動力伝達経路の一部を構成する出力歯車224に第2遊星歯車装置222を介して連結されているが、第2電動機MG2がその出力歯車224に連結されていることに加え、クラッチ等の係合要素を介して第1遊星歯車装置220にも連結可能とされており、第1電動機MG1の代わりに第2電動機MG2によって第1遊星歯車装置220の差動状態を制御可能とする動力伝達装置210の構成であってもよい。
【符号の説明】
【0124】
8,206:車両
10,208:車両用駆動装置
12:エンジン
24,240:駆動輪
58,258:電子制御装置
220:第1遊星歯車装置(電気式差動機構)
MG:電動機(走行用電動機)
MG1:第1電動機(差動用電動機)
MG2:第2電動機(走行用電動機)
【技術分野】
【0001】
本発明は、ハイブリッド車両用駆動装置の制御装置に関し、特に、エンジンの冷間時における出力制御の改良に関する。
【背景技術】
【0002】
エンジンおよび走行用電動機の動力が駆動輪に伝達される車両において、予め設定されたエンジン動作曲線に従って前記エンジンを制御する車両用駆動装置の制御装置が、従来から知られている。例えば、特許文献1に記載された車両の制御装置がそれである。この特許文献1の車両は所謂ハイブリッド車両であり、走行用駆動力源であるエンジンおよび第2電動機と、そのエンジンの動力を出力軸と第1電動機とに分配する動力分割機構とを備えている。この車両の制御装置は、上記エンジン動作曲線として、通常ラインと、同じパワー(エンジン出力)をその通常ラインを用いてエンジンから出力させる場合に比して高エンジン回転速度側で且つ低エンジントルク側にエンジンを制御するためのエミッションラインとを予め記憶した記憶装置を含んでいる。そして、上記制御装置は、エンジン水温が所定値以下であり且つ触媒温度が所定値以下である場合には、上記エミッションラインに従ってエンジンを制御する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】WO2010/079609号公報
【特許文献2】特開2010−260392号公報
【特許文献3】特開2010−241170号公報
【特許文献4】特開2003−097310号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1の制御装置は、前記エンジンの暖気制御中、すなわちエンジンが暖機完了に至る前の暖機過程では、前述したように、エンジンの制御に用いられる前記エンジン動作曲線を、暖機完了後に用いられる前記通常ラインに対して変更する。しかし、エンジン出力と前記第2電動機の出力との和に対するエンジン出力割合を上記暖機完了後に対して変更するものではない。また、前記エンジンの暖機過程では、エンジンの冷却による熱損失は、同じエンジン出力において比較すれば、前記暖機完了後よりも大きくなる。従って、前記特許文献1の制御装置が行うエンジン制御では、上記暖機過程において車両の燃費を悪化させるおそれがあった。なお、このような課題は未公知のことである。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、ハイブリッド車両において、エンジンの暖機過程における車両の燃費悪化を抑制することができる車両用駆動装置の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するための第1発明の要旨とするところは、(a)エンジンおよび走行用電動機の動力を駆動輪に伝達する車両用駆動装置の制御装置であって、(b)前記エンジンが暖機完了に至る前の暖機過程では、エンジン出力と前記走行用電動機の出力との和に対するエンジン出力割合を前記エンジンの暖機完了後よりも小さくすることを特徴とする。
【発明の効果】
【0007】
前記エンジンの暖機過程では、前記暖機完了後と比較して、エンジンの冷却による熱損失が拡大するところ、前記第1発明のように前記暖機過程でのエンジン出力割合を前記暖機完了後よりも小さくすれば、その冷却による熱損失が抑えられる。従って、前記エンジンの暖機過程における車両の燃費悪化を抑制することができる。なお、燃費とは、例えば単位燃料消費量当たりの走行距離等であり、燃費の向上とはその単位燃料消費量当たりの走行距離が長くなることであり、或いは、車両全体としての燃料消費率(=燃料消費量/駆動輪出力)が小さくなることである。逆に、燃費の低下(悪化)とはその単位燃料消費量当たりの走行距離が短くなることであり、或いは、車両全体としての燃料消費率が大きくなることである。
【0008】
また、第2発明の要旨とするところは、前記第1発明の車両用駆動装置の制御装置であって、(a)前記車両用駆動装置は、前記エンジンの動力を前記駆動輪へ出力し差動用電動機により差動状態が制御される電気式差動機構を備えており、(b)前記エンジンの暖機過程では、エンジン回転速度が、前記車両の要求出力に基づいて想定される前記暖機完了後のエンジン回転速度よりも高くなるように、エンジン出力を制御することを特徴とする。このようにすれば、前記差動用電動機の作動状態が上記想定される暖機完了後のエンジン回転速度を前提としたものと比較して発電側に変化するので、走行用駆動力源としての前記走行用電動機の出力を引き上げ易くなる。
【0009】
また、第3発明の要旨とするところは、前記第2発明の車両用駆動装置の制御装置であって、(a)前記エンジン出力割合を定めた出力割合マップが予め設定されており、(b)前記エンジンの温度に基づいてその出力割合マップから決定した前記エンジン出力と前記走行用電動機の出力とを、フィードフォワード制御により前記エンジンと前記走行用電動機とにそれぞれ出力させることを特徴とする。このようにすれば、前記エンジン出力と前記走行用電動機の出力とが前記車両の要求出力から直ちに決まるので、前記制御装置の制御負荷を軽減することが可能である。
【0010】
また、第4発明の要旨とするところは、前記第1発明から第3発明の何れか一の車両用駆動装置の制御装置であって、前記エンジンの暖機過程では、前記エンジン出力割合を前記エンジンの温度が低いほど小さくすることを特徴とする。このようにすれば、前記エンジンの冷却による熱損失がエンジンの温度が低いほど拡大するのに合わせて、車両の燃費悪化を抑制できるように、エンジン出力を過不足なく得ることが可能である。
【0011】
また、第5発明の要旨とするところは、前記第1発明から第4発明の何れか一の車両用駆動装置の制御装置であって、(a)予め設定されたエンジン動作曲線に従って前記エンジンを制御し、(b)前記エンジンの暖機過程では、前記エンジン動作曲線を前記エンジンの暖機完了後よりも低エンジントルク側に設定することを特徴とする。また、前記エンジンの熱効率の良い作動領域はエンジン温度が低いほど低エンジントルク側にずれる。従って、上記第5発明のようにすれば、前記エンジンの暖機過程では、その熱効率の良い作動領域のずれに合わせて前記エンジン動作曲線が設定されることになり、前記エンジンを燃費良く作動させることができる。
【0012】
ここで、好適には、前記エンジンの暖機完了後および暖機過程で用いられる前記エンジン動作曲線は、同じエンジン出力を得るとした場合に前記エンジンの燃費が最も良くなるようにそのエンジンを作動させるエンジン燃費最適線(エンジン燃費最適ライン)である。
【0013】
また、好適には、前記エンジンの暖機過程では、前記エンジン動作曲線から定まるアイドリング回転速度を前記エンジンの暖機完了後のアイドリング回転速度に一致させるようにしつつ、前記エンジンの温度が低いほど、前記エンジン動作曲線をより低エンジントルク側に設定する。このようにすれば、前記エンジンの暖機過程において、エンジンの温度に応じた熱効率の良い領域でエンジンを作動させ、車両の燃費悪化を抑制することが可能である。
【0014】
また、好適には、前記エンジンの暖機過程に対応して予め定められたそのエンジンの温度範囲の下限温度よりも低温側のエンジン低温温度範囲では、前記エンジン出力割合を前記エンジンの温度が低いほど大きくする。このようにすれば、蓄電装置などの電力供給源から前記走行用電動機が受ける電力が低温により制限されたとしても、前記エンジンおよび前記走行用電動機が出力不足にならないようにそれらを作動させることが可能である。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施例であるハイブリッド車両に係る駆動系統の構成を概念的に示す実施例1の図である。
【図2】図1のハイブリッド車両における電動機及びトルクコンバータ付近の構成を説明するために、その一部を切り欠いて示す断面図である。
【図3】図1のハイブリッド車両に搭載されたエンジンの暖機完了後と冷間時との間で、エンジントルクの特性を比較するための図である。
【図4】図1のハイブリッド車両に搭載されたエンジンの暖機完了後においてエンジン制御に用いられるエンジン動作曲線を表した図である。
【図5】図4に示す暖機完了後のエンジン動作曲線と共に、上記エンジンの暖機過程においてエンジン制御に用いられるエンジン動作曲線を表した図である。
【図6】図1のハイブリッド車両において、エンジンの暖機完了後および暖機過程において用いられるエンジン動作曲線とエンジン温度との関係を説明するための図である。
【図7】図1の電子制御装置に備えられた制御機能の要部を説明するための実施例1の機能ブロック線図である。
【図8】図1のハイブリッド車両において、所定の車両要求パワーに一致するように駆動用総出力(=エンジン出力+電動機出力)が発生させられた場合において、エンジン温度に応じたその駆動用総出力の内訳を模式的に表した図である。
【図9】図1のエンジンの暖機完了後、暖機過程、低温状態のそれぞれの場合において、図8に示される駆動用総出力の内訳を棒グラフで例示した図である。
【図10】図1の電子制御装置の制御作動の要部、すなわち、エンジンの暖機過程においてエンジンの出力制御を行う制御作動を説明するための実施例1のフローチャートである。
【図11】図1のハイブリッド車両において、エンジン12の暖機過程で用いられるエンジン動作曲線が、暖機完了後よりも高エンジン回転速度側にずらされ、エンジン温度が低いほど高エンジン回転速度側にずらされる場合を説明するための図である。
【図12】本発明が適用される車両用駆動装置を説明するための実施例2の骨子図である。
【図13】図12の車両用駆動装置において電子制御装置に入力される信号を例示した図であると共に、その電子制御装置に備えられた制御機能の要部を説明するための実施例2の機能ブロック線図である。
【図14】図5と同様にエンジン動作曲線を表した図であって、実施例2におけるエンジン指示出力および第2電動機指示出力の決定方法を説明するための図である。
【図15】図13の電子制御装置の制御作動の要部、すなわち、エンジンの暖機過程においてそのエンジンの出力制御を行う制御作動を説明するための実施例2のフローチャートである。
【図16】図12の車両用駆動装置において、低速から中速での車両走行時における第1遊星歯車装置の差動状態を表した共線図であり、図16(a)は図14のエンジン動作点hでエンジンが作動させられる場合の各回転要素の回転速度を表しており、図16(b)は図14のエンジン動作点c''でエンジンが作動させられる場合の各回転要素の回転速度を表している。
【図17】図12の車両用駆動装置において、中速から高速での車両走行時における第1遊星歯車装置の差動状態を表した共線図であり、図17(a)は図14のエンジン動作点hでエンジンが作動させられる場合の各回転要素の回転速度を表しており、図17(b)は図14のエンジン動作点c''でエンジンが作動させられる場合の各回転要素の回転速度を表している。
【発明を実施するための形態】
【0016】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【実施例1】
【0017】
図1は、本発明の一実施例であるハイブリッド車両8(以下、単に「車両8」ともいう)に係る駆動系統の構成を概念的に示す図である。この図1に示すハイブリッド車両8は、車両用駆動装置10(以下、「駆動装置10」という)と差動歯車装置21と左右1対の車軸22と左右1対の駆動輪24と油圧制御回路34とインバータ56と電子制御装置58とを備えている。そして、その駆動装置10は、走行用の駆動源として機能するエンジン12及び電動機MGと、エンジン断続用クラッチK0と、トルクコンバータ16と、自動変速機18と、油圧ポンプ28とを備えている。図1に示すように、ハイブリッド車両8は、エンジン12及び電動機MGにより発生させられた駆動力が、トルクコンバータ16、自動変速機18、差動歯車装置21、及び左右1対の車軸22をそれぞれ介して左右1対の駆動輪24へ伝達されるように構成されている。すなわち、駆動装置10は、エンジン12及び電動機MGの動力を駆動輪24に伝達する。斯かる構成から、上記ハイブリッド車両8は、上記エンジン12及び電動機MGの少なくとも一方を走行用の駆動源として駆動される。すなわち、上記ハイブリッド車両8においては、専ら上記エンジン12を走行用の駆動源とするエンジン走行、エンジン12を停止させると共に専ら上記電動機MGを走行用の駆動源とするEV走行(モータ走行)、及び、上記エンジン12及び電動機MGを走行用の駆動源とすると共に走行状態に応じてその電動機MGにより回生(発電)を行うEHV走行(ハイブリッド走行)の何れかが選択的に成立させられる。
【0018】
上記エンジン12は、例えば、燃料が燃焼室内に直接噴射される筒内噴射型のガソリンエンジンやディーゼルエンジン等の内燃機関である。また、エンジン12には、エンジン12の駆動(出力トルク)を制御するために、電子スロットル弁を開閉制御するスロットルアクチュエータ、燃料噴射制御を行う燃料噴射装置、及び点火時期制御を行う点火装置等を備えた出力制御装置14が設けられている。この出力制御装置14は、後述する電子制御装置58から供給される指令に従ってスロットル制御のために上記スロットルアクチュエータにより上記電子スロットル弁を開閉制御する他、燃料噴射制御のために上記燃料噴射装置による燃料噴射を制御し、点火時期制御のために上記点火装置による点火時期を制御する等して上記エンジン12の出力制御を実行する。
【0019】
前記電動機MGは、本発明の走行用電動機に対応しており、例えば3相の同期電動機であって、駆動力を発生させるモータ(発動機)としての機能と反力を発生させるジェネレータ(発電機)としての機能とを有するモータジェネレータであり、少なくとも上記モータとしての機能を有している。また、前記エンジン12とその電動機MGとの間の動力伝達経路には、係合状態に応じてその動力伝達経路における動力伝達を制御するエンジン断続用クラッチK0が設けられている。すなわち、前記エンジン12の出力部材であるエンジン出力軸26(例えばクランク軸)は、斯かるエンジン断続用クラッチK0を介して前記電動機MGのロータ30に選択的に連結されるようになっている。また、その電動機MGのロータ30は、前記トルクコンバータ16の入力部材であるフロントカバー32に相対回転不能に連結されている。
【0020】
上記エンジン断続用クラッチK0は、例えば、油圧アクチュエータによって係合制御される湿式多板型の油圧式摩擦係合装置であり、油圧制御回路34から供給される油圧に応じてその係合状態が係合(完全係合)、スリップ係合、乃至解放(完全解放)の間で制御されるようになっている。具体的には、このエンジン断続用クラッチK0が係合されることにより、上記エンジン出力軸26とフロントカバー32との間の動力伝達経路における動力伝達が行われる(接続される)。その一方で、上記エンジン断続用クラッチK0が解放されることにより、上記エンジン出力軸26とフロントカバー32との間の動力伝達経路における動力伝達が遮断される。また、上記エンジン断続用クラッチK0がスリップ係合されることにより、上記エンジン出力軸26とフロントカバー32との間の動力伝達経路においてそのエンジン断続用クラッチK0の伝達トルクに応じた動力伝達が行われる。
【0021】
前記自動変速機18は、トルクコンバータ16と駆動輪24との間の動力伝達経路の一部を構成しており、係合要素の掴み替えによりクラッチ・ツゥ・クラッチ変速を行う有段式の自動変速機構である。換言すれば、その自動変速機18は、予め定められた複数の変速段(変速比)の何れかが択一的に成立させられる自動変速機構であり、斯かる変速を行うために複数の係合要素と複数の遊星歯車装置とを備えて構成されている。例えば、その自動変速機18が有する係合要素は、湿式多板型のクラッチやブレーキ等であり、要するに油圧アクチュエータによって係合制御される油圧式摩擦係合装置である。自動変速機18では、前記油圧制御回路34から供給される油圧に応じてそれら複数の油圧式摩擦係合装置が選択的に係合乃至解放される。そして、それら油圧式摩擦係合装置の連結状態の組合せに応じて、例えば第1速から第4速である複数の前進変速段(前進ギヤ段、前進走行用ギヤ段)、或いは後進変速段(後進ギヤ段、後進走行用ギヤ段)の何れかが択一的に成立させられる。
【0022】
図2は、図1のハイブリッド車両8における前記電動機MG及びトルクコンバータ16付近の構成を説明するために、その一部を切り欠いて示す断面図である。なお、前記電動機MG、トルクコンバータ16、自動変速機18、及びエンジン出力軸26はそれらに共通の軸心Ctrに対して略対称的に構成されており、図2においては軸心Ctrの下半分が省略されている。この図2に示すように、前記電動機MG、トルクコンバータ16、及び自動変速機18は、何れもトランスミッションケース36内に収容されている。このトランスミッションケース36は、例えばアルミダイキャスト製の分割式ケースであり、車体等の非回転部材に固定されている。
【0023】
前記エンジン断続用クラッチK0は、円筒状のクラッチドラム38と、そのクラッチドラム38よりも小径であってクラッチドラム38と同心且つ相対回転可能に設けられた円筒状のクラッチハブ40と、それらクラッチドラム38とクラッチハブ40との間の円環状の間隙内に設けられた摩擦係合部材42と、その摩擦係合部材42を軸心Ctr方向において押圧するクラッチピストン44とを、備えている。上記クラッチドラム38は、前記電動機MGのロータ30におけるボス部30aに例えば溶接等により一体的に固設されており、そのロータ30と一体回転させられるようになっている。また、上記摩擦係合部材42は、上記クラッチドラム38に相対回転不能に係合された複数の円環板状のセパレータと、それら複数のセパレータ間にそれぞれ設けられて上記クラッチハブ40に相対回転不能に係合された複数の円環板状の摩擦プレートとを、備えている。
【0024】
このように構成された前記エンジン断続用クラッチK0においては、上記摩擦係合部材42が上記クラッチピストン44により軸心Ctr方向に押圧されて上記セパレータと摩擦プレートとが相互に摩擦係合させられることで、上記クラッチドラム38とクラッチハブ40との間の相対回転が抑制されるようになっている。すなわち、上記摩擦係合部材42のセパレータと摩擦プレートとの摩擦係合により、上記クラッチドラム38とクラッチハブ40との間が相互に動力伝達可能な状態とされる。なお、このエンジン断続用クラッチK0は、好適には、後述する電子制御装置58から指令が出力されない状態においては係合させられる常閉型(ノーマリークローズ)のクラッチとされる。
【0025】
前記エンジン出力軸26は、その出力端部すなわち前記電動機MG側の一端部がドライブプレート46等を介して前記エンジン断続用クラッチK0のクラッチハブ40と一体的に回転させられる回転軸48に連結されている。すなわち、前記エンジン出力軸26とクラッチハブ40とは、共通の軸心Ctrまわりに一体的に回転させられるように上記ドライブプレート46及び回転軸48等を介して連結されている。また、前記トルクコンバータ16のポンプ翼車16pには油圧ポンプ28が連結されており、そのポンプ翼車16pの回転に伴いその油圧ポンプ28により発生させられた油圧が前記油圧制御回路34に元圧として供給されるようになっている。
【0026】
トルクコンバータ16は、電動機MGと自動変速機18との間に介装されており、軸心Ctrまわりに回転するように配設された流体伝動装置であり、ポンプ翼車16pとタービン翼車16tとステータ翼車16sとフロントカバー32とを備えている。そして、トルクコンバータ16は、ポンプ翼車16pに入力された駆動力をタービン翼車16tへ流体(作動油)を介して伝達する。このトルクコンバータ16のポンプ翼車16pは、フロントカバー32に一体的に固設されており、そのフロントカバー32と一体回転させられるようになっている。従って、ポンプ翼車16pはトルクコンバータ16の入力側回転要素であって、そのポンプ翼車16pには、電動機MGからの駆動力が入力されると共に、エンジン12からの動力がエンジン断続用クラッチK0の係合または解放により選択的に入力される。タービン翼車16tは、自動変速機18の入力軸である変速機入力軸19にスプライン嵌合等によって相対回転不能に連結されている。すなわち、タービン翼車16tは、駆動輪24に向けて動力を出力する回転要素であり、要するに、トルクコンバータ16の出力側回転要素である。ステータ翼車16sは、非回転部材であるトランスミッションケース36に一方向クラッチを介して連結されている。
【0027】
また、トルクコンバータ16は、ポンプ翼車16pとタービン翼車16tとの間に、ポンプ翼車16p及びタービン翼車16tを選択的に相互に直結するロックアップクラッチLUを備えている。このロックアップクラッチLUは、油圧制御回路34から供給される油圧に応じてその係合状態が係合(完全係合)、スリップ係合、乃至解放(完全解放)の間で制御されるようになっている。
【0028】
前記電動機MGは、前記回転軸48の外周側において前記トランスミッションケース36により軸心Ctrまわりの回転可能に支持されたロータ30と、そのロータ30の外周側において前記トランスミッションケース36に一体的に固定されたステータ50とを、備えている。前記ロータ30は、1対の軸受52を介して前記トランスミッションケース36に回転可能に支持された円筒状のボス部30aと、上記ステータ50の内周側においてそのステータ50との間に僅かな隙間を隔てた状態で軸心Ctr方向に積層された複数の円環状の鋼板を有するロータ部30bと、それらボス部30aとロータ部30bとを一体に連結する連結部30cとを、備えている。前記ロータ30は、上記ロータ部30bの内周側に連結されると共に例えば溶接等により前記フロントカバー32に一体的に固定された伝達部材54を介してそのフロントカバー32に連結されている。また、上記ステータ50は、複数の円環状の鋼板がそれぞれ軸心Ctr方向に積層されたコア50aと、そのコア50aの内周部の周方向の一部に環状に巻き掛けられ、周方向に連続して複数設けられたコイル50bとを、備えている。このコア50aは、周方向の複数箇所においてボルト等により前記トランスミッションケース36に一体的に固定されている。
【0029】
このように構成された前記電動機MGは、図1に示すインバータ56を介してバッテリやコンデンサ等の蓄電装置57に接続されており、後述する電子制御装置58によりそのインバータ56が制御されることで上記コイル50bに供給される駆動電流が調節されることにより、前記電動機MGの駆動が制御されるようになっている。換言すれば、上記電子制御装置58によりそのインバータ56が制御されることで前記電動機MGの出力トルクTmg(以下、電動機トルクTmgという)が増減させられるようになっている。なお、斯かる電動機トルクTmgは、前記エンジン断続用クラッチK0の解放時(非係合時)には前記トルクコンバータ16に対してのみ出力されるが、前記エンジン断続用クラッチK0の係合時にはその電動機トルクTmgの一部が前記トルクコンバータ16に出力されると共に他部が前記エンジン12に出力される。また、電動機トルクTmgおよびエンジントルクTeは、エンジン12の回転方向に一致する方向、すなわち、駆動輪24を駆動する方向が正方向である。一方で、駆動輪24を制動する方向が負方向である。
【0030】
前記ハイブリッド車両8においては、例えば専ら前記電動機MGを走行用の駆動源とするEV走行から前記エンジン12を駆動源として用いるエンジン走行又はハイブリッド走行への移行に際して、前記エンジン断続用クラッチK0の係合により前記エンジン12の始動が行われる。すなわち、前記エンジン断続用クラッチK0がスリップ係合乃至完全係合させられることにより、そのエンジン断続用クラッチK0を介して伝達されるエンジン始動のためのトルクにより前記エンジン12が回転駆動され、それによりエンジン回転速度Neが引き上げられつつエンジン点火や燃料供給等が制御されることで前記エンジン12が始動される。また、この際に前記電動機MGにより補償トルクが発生させられ、車両前後方向の加速度(減速G)の発生が抑制される。すなわち、前記エンジン12の始動は、着火による爆発エネルギから得られるトルクと、前記エンジン断続用クラッチK0による係合エネルギから得られるトルクすなわちそのエンジン断続用クラッチK0を介して伝達されるエンジン始動トルクとで前記エンジン12が回転駆動されることにより行われる。
【0031】
また、前記ハイブリッド車両8は、図1に例示するような制御系統を備えている。この図1に示す電子制御装置58は、CPU、RAM、ROM、及び入出力インターフェース等を備えた所謂マイクロコンピュータを含んで構成されている。その電子制御装置58は、CPUがRAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従って信号処理を行うことにより、前記エンジン12の駆動制御、前記電動機MGの駆動制御、前記自動変速機18の変速制御、前記エンジン断続用クラッチK0の係合力制御、及び前記ロックアップクラッチLUの係合制御等の各種制御を実行する。
【0032】
図1に示すように、上記電子制御装置58には、前記ハイブリッド車両8に設けられた各センサにより検出される各種入力信号が供給されるようになっている。例えば、アクセル開度センサ60により検出されるアクセル開度Accを表す信号、電動機回転速度センサ62により検出される前記電動機MGの回転速度(電動機回転速度)Nmgを表す信号、エンジン回転速度センサ64により検出される前記エンジン12の回転速度(エンジン回転速度)Neを表す信号、タービン回転速度センサ66により検出される前記トルクコンバータ16のタービン翼車16tの回転速度(タービン回転速度)Ntを表す信号、車速センサ68により検出される車速Vを表す信号、エンジンオイルセンサ69により検出されるエンジンオイルの油温TEMPOilを表す信号、エンジン水温センサ70により検出される前記エンジン12の冷却水温TEMPwを表す信号、エンジン12に設けられた電子スロットル弁の開度であるスロットル開度θthを表す信号、及び蓄電装置57の充電残量(充電状態)SOCを表す信号等が、上記電子制御装置58に入力される。ここで、電動機回転速度センサ62により検出される電動機回転速度Nmgは、前記トルクコンバータ16の入力回転速度であり、そのトルクコンバータ16におけるポンプ翼車16pの回転速度(ポンプ回転速度)Npに相当する。また、上記タービン回転速度センサ66により検出されるタービン回転速度Ntは、前記トルクコンバータ16の出力回転速度であり、前記自動変速機18における変速機入力軸19の回転速度Natinすなわち変速機入力回転速度Natinに相当する。また、自動変速機18の出力軸20(以下、変速機出力軸20という)の回転速度Natoutすなわち変速機出力回転速度Natoutは、前記車速Vに対応する。
【0033】
また、前記電子制御装置58から、前記ハイブリッド車両8に設けられた各装置に各種出力信号が供給されるようになっている。例えば、前記エンジン12の駆動制御のためにそのエンジン12の出力制御装置14に供給される信号、前記電動機MGの駆動制御のために前記インバータ56に供給される信号、前記自動変速機18の変速制御のために前記油圧制御回路34における複数の電磁制御弁に供給される信号、前記エンジン断続用クラッチK0の係合制御のために前記油圧制御回路34における電磁制御弁に供給される信号、及び前記ロックアップクラッチLUの係合制御のために前記油圧制御回路34における電磁制御弁に供給される信号等が、前記電子制御装置58から各部へ供給される。
【0034】
電子制御装置58が実行するハイブリッド駆動制御及び自動変速機18の変速制御の概要に関して説明する。前記自動変速機18の変速制御は、予め定められた関係から前記ハイブリッド車両8の駆動状態(走行状態)に基づいて、電子制御装置58により実行される。例えば、その変速制御では、前記自動変速機18において成立させられるべき変速段(ギヤ段)が、予め設定されている変速マップ(変速線図)から、前記車速センサ68により検出される車速V及び前記アクセル開度センサ60により検出されるアクセル開度Acc等で表される前記駆動状態に基づいて判定される。そして、その判定に基づき、その成立させられるべき変速段が成立させられるように前記自動変速機18へ供給される油圧が制御される。具体的には、前記油圧制御回路34に備えられた各電子制御弁の作動(出力油圧)が電子制御装置58により制御され、それにより、その油圧制御回路34から前記自動変速機18における各油圧式摩擦係合装置の油圧アクチュエータへ供給される油圧が制御される。
【0035】
また、前記ハイブリッド車両8におけるハイブリッド駆動制御が、電子制御装置58により実行される。すなわち、前記エンジン12の駆動が出力制御装置14を介して制御されると共に電動機MGの作動が前記インバータ56を介して制御され、それにより、それらエンジン12及び電動機MGの少なくとも一方を走行用の駆動源とする前記ハイブリッド車両8の駆動制御が実行される。例えば、前記EV走行を行うEV走行モード(モータ走行モード)、前記エンジン走行を行うエンジン走行モード、前記EHV走行を行うEHV走行モード(ハイブリッド走行モード)等が、電子制御装置58により、前記ハイブリッド車両8の走行状態に応じて選択的に成立させられる。
【0036】
上記EV走行モードでは、基本的には前記エンジン12の駆動は停止させられるので、前記エンジン断続用クラッチK0は解放(完全解放)される。これにより、前記エンジン12と電動機MGとの間の動力伝達経路は遮断され、そのエンジン12から前記ロックアップクラッチ16側へ動力伝達は行われず、逆にそのロックアップクラッチ16側から前記エンジン12へのトルク伝達も行われない。
【0037】
前記エンジン走行モードでは、前記エンジン断続用クラッチK0は係合(完全係合)される。また、前記電動機MGは空転させられるが、走行状態に応じて回生を行うように作動させられるものであってもよい。
【0038】
前記EHV走行モードでは、前記エンジン断続用クラッチK0は係合(完全係合)される。このEHV走行モードにおいて、前記電動機MGは必ずしも常に走行用の駆動源として用いられるものでなくともよく、前記ハイブリッド車両8の走行状態に応じて空転させられたり、回生作動させられる等の制御が行われるものであってもよい。
【0039】
また、電子制御装置58は、前記電動機MGによる回生(発電)を制御する。すなわち、予め定められた関係から駆動力要求量としてのアクセル開度Acc等に基づいて回生の実行が判定された場合には、前記電動機MGにより回生が行われるようにその作動を制御する。このようにして前記電動機MGの回生により発生させられた電気エネルギは、前記インバータ56を介して図示しない蓄電装置57に蓄積される。そして、前記電動機MGが駆動源として用いられる際に、蓄電装置57から前記インバータ56を介してその電動機MGに電気エネルギが供給されて駆動力が発生させられる。
【0040】
前記エンジン12が、暖機完了に至る前の暖機過程(冷間時)において出力低下を生じる原因について、図3を用いて説明する。図3は、エンジン12の暖機完了後(単に、「暖機後」ともいう)と上記冷間時との間で、エンジントルクTeの特性を比較するための図である。図3は、エンジン回転速度Neおよびスロットル開度θthが上記暖機完了後と上記冷間時との間において各々同じという前提である。図3(a)(b)において、点hは上記暖機完了後におけるエンジン動作点であり、点cは上記冷間時におけるエンジン動作点である。また、図3(b)の実線L01は、上記暖機完了後において用いられる予め設定されたエンジン動作曲線である。
【0041】
図3(a)に示すように、エンジントルクTeとエンジン12の点火進角との関係は、全体的に、エンジン12の冷間時には暖機完了後と比較して低トルク側にずれる。従って、エンジン出力Peの目標値である目標エンジン出力Petすなわち出力指示値であるエンジン指示出力Petが上記暖機完了後と上記冷間時との間で変わらない場合、上記冷間時においては、ノッキングが生じ難いことを利用してエンジン12の点火時期を暖機完了後よりも進角させた(SAh→SAc)としても、図3(a)の矢印AR01に示すようにエンジントルクTeはThからTcへと低下する。そうすると、図3(b)の矢印AR02に示すように実際のエンジン出力Peが低下する。このようなことから、エンジン12の暖機過程(冷間時)においては、上記目標エンジン出力(エンジン指示出力)Petに対して実際のエンジン出力Peが追従できずに不足することがあるので、本実施例の電子制御装置58は、上記暖機過程を含むエンジン12の暖機が未完了である場合には、実際のエンジン出力Peを目標エンジン出力Petに一致させるようにするために、エンジン出力Peを補正する。具体的には、後述の図8に示すように補正エンジン出力ΔPeとエンジン温度TEMPegとの関係が予め実験的に求められ設定されており、その予め設定された関係から、電子制御装置58は、エンジン温度TEMPegに基づいて、エンジン出力Peの補正量としての上記補正エンジン出力ΔPeを決定する。そして、スロットル開度θthを拡大させるなどして、その補正エンジン出力ΔPeをエンジン12に追加的に出力させることで、上記エンジン出力Peを補正する。従って、本実施例では、例えば前記暖機過程においても、エンジン12は、目標エンジン出力Petに一致するようにエンジン出力Peを発生させることになる。なお、前記エンジン温度TEMPegは、本実施例ではエンジン12の冷却水温TEMPwで表されるが、その冷却水温TEMPwに替えて前記エンジンオイルの油温TEMPOilで表されても差し支えない。
【0042】
図4〜図6は、前記EHV走行モードにおいてエンジン制御に用いられるエンジン動作曲線について説明するための図である。詳細には、図4は、エンジン12の暖機完了後においてエンジン制御に用いられるエンジン動作曲線を表した図である。図5は、その暖機完了後のエンジン動作曲線と共に、エンジン12の暖機過程においてエンジン制御に用いられるエンジン動作曲線を表した図である。図6は、上記暖機完了後および暖機過程において用いられるエンジン動作曲線と前記エンジン温度TEMPegとの関係を説明するための図である。図4および図5にて破線で表された曲線は、エンジン出力Peが等しい点を連ねた等エンジン出力線である。
【0043】
本実施例では、エンジン12の暖機完了後および暖機過程において用いられる上記エンジン動作曲線は、同じエンジン出力Peを得るとした場合にエンジン12の燃費が最も良くなるようにそのエンジン12を作動させるエンジン燃費最適線(エンジン燃費最適ライン)である。そして、図4および図5に示すエンジン12の熱効率が等しい点を連ねた等熱効率線は、エンジン温度TEMPegが低下するほど低エンジントルク方向にずれるものである。そのため、上記暖機過程において用いられるエンジン動作曲線すなわちエンジン燃費最適ラインは、例えば図6に示すように、上記暖機完了後において用いられるエンジン動作曲線よりも低エンジントルク側の範囲で、エンジン温度TEMPegが低いほど低エンジントルク方向にずれることになる。このようなエンジン動作曲線(エンジン燃費最適ライン)とエンジン温度TEMPegとの関係は、予め実験的に求められており、エンジン動作曲線マップとして、電子制御装置58に予め記憶されている。そして、電子制御装置58は、前記EHV走行モードにおいては、エンジン温度TEMPegに基づいて上記エンジン動作曲線マップからエンジン動作曲線を選択し、その選択して予め設定したエンジン動作曲線に従ってエンジン12を制御する。
【0044】
ところで、前記EHV走行モードにおいてエンジン12の暖機過程では、図5および図6に示すように、前記エンジン動作曲線がエンジン12の暖機完了後よりも低エンジントルク側に設定されるが、更なる燃費向上のため、本実施例ではそれに加えて、上記暖機過程では、エンジン出力Peと電動機MGの出力Pmg(以下、電動機出力Pmgという)との和である駆動用総出力Pemに対するエンジン出力割合RPeが、上記暖機完了後よりも小さくされる。このような上記暖機過程におけるエンジン12の出力制御を行うための制御機能の要部について図7を用いて、次に説明する。なお、図7で説明される制御機能は前記EHV走行モードで行われる制御に関するものであるので、その前提としてエンジン断続用クラッチK0は係合されている。また、前記暖機完了後における前記駆動用総出力Pemに対する電動機MGの出力割合RPmg(以下、電動機出力割合RPmgという)およびエンジン出力割合RPeは、予め実験的に設定されている。
【0045】
図7は、前記電子制御装置58に備えられた制御機能の要部を説明するための機能ブロック線図である。図7に示すように、電子制御装置58は、車両要求出力決定部としての車両要求出力決定手段80と、暖機完了判断部としての暖機完了判断手段82と、エンジン動作曲線設定部としてのエンジン動作曲線設定手段84と、指示出力決定部としての指示出力決定手段86と、走行用出力制御部としての走行用出力制御手段88とを備えている。
【0046】
車両要求出力決定手段80は、車両8に対し要求される要求出力Preq(単位は例えばkW)を逐次決定する。具体的には、車両要求出力決定手段80は、運転者が車両8に要求する出力要求量に相当するアクセル開度Accと車速Vとに基づいて、予め実験的に設定された関係から、その車両8の要求出力Preqすなわち車両要求パワーPreqを決定する。例えば、アクセル開度Accが大きいほど、運転者はより大きな駆動輪出力を要求していることになるので、上記車両要求パワーPreqは大きく決定される。要するに、車両要求パワーPreqとは、エンジン出力Peと電動機出力Pmgとの合計の目標値、言い換えれば、走行用駆動力源の出力合計の目標値である。
【0047】
暖機完了判断手段82は、前記エンジン温度TEMPegに基づいて、エンジン12の暖機が完了したか否かを逐次判断する。具体的には、その暖機の完了を判定するための暖機完了判定温度TEMP1が予め実験的に設定されており、暖機完了判断手段82は、エンジン温度TEMPegが暖機完了判定温度TEMP1以上か否かを逐次判断する。そして、エンジン温度TEMPegが暖機完了判定温度TEMP1以上であれば、エンジン12の暖機が完了したと判断する。このエンジン12の暖機が完了したという判断がなされた後は、エンジン12の暖機完了後である。
【0048】
エンジン動作曲線設定手段84は、エンジン12の制御に用いられる前記エンジン動作曲線を選択する。例えば図6に実線で示すように、前記暖機完了後のエンジン動作曲線はエンジン温度TEMPegに拘らず定まっているので特に選択する必要はないが、前記暖機過程のエンジン動作曲線は、図6に一点鎖線または二点鎖線で示すように、エンジン温度TEMPegに応じて異なるものとなる。そのため、エンジン動作曲線設定手段84は、暖機完了判断手段82によりエンジン12の暖機が完了していないと判断された場合には、エンジン温度TEMPegに基づいて前記エンジン動作曲線マップから前記エンジン動作曲線を選択し設定する。具体的には図6に示すように、エンジン動作曲線設定手段84は、エンジン12の暖機過程では、前記エンジン動作曲線をエンジン12の暖機完了後よりも低エンジントルク側に設定する。詳細に言えば、その暖機過程では、前記エンジン動作曲線から定まるアイドリング回転速度Neidl(図6参照)をエンジン12の暖機完了後のアイドリング回転速度Neidlに一致させるようにしつつ、エンジン温度TEMPegが低いほど、エンジン制御に用いるエンジン動作曲線をより低エンジントルク側に設定する。
【0049】
また、エンジン温度TEMPegが低いほど上記エンジン動作曲線が低エンジントルク側にずれる前記暖機過程に対応するエンジン温度範囲よりも更に低温側の温度範囲では、蓄電装置57から電動機MGが受ける電力が低温により制限される可能性があるので、上記エンジン動作曲線は、前記エンジン燃費最適ラインとは一致しなくなるが、その低温に起因した電力制限を加味して設定される。具体的には、前記暖機完了判定温度TEMP1を上限温度とする上記エンジン12の暖機過程に対応したエンジン温度TEMPegの範囲WTemd(以下、エンジン暖機過程温度範囲WTemdという)が予め実験的に定められており、更に、そのエンジン暖機過程温度範囲WTemdの下限温度よりも低温側のエンジン低温温度範囲WTeloが予め実験的に定められている。そして、エンジン動作曲線設定手段84は、エンジン温度TEMPegが上記エンジン低温温度範囲WTelo内である場合には、エンジン暖機過程温度範囲WTemdの下限温度に対応するエンジン動作曲線と前記暖機完了後のエンジン動作曲線との間で、エンジン温度TEMPegが低いほど、エンジン制御に用いるエンジン動作曲線をより高エンジントルク側に設定する。このようにすることにより、上記エンジン低温温度範囲WTeloにおいてエンジン温度TEMPegが低いほど、前記エンジン出力割合RPeを大きくすることができる。なお、本実施例では、エンジン温度TEMPegが上記エンジン低温温度範囲WTelo内にあるときのエンジン12の状態を、エンジン12の低温状態と呼ぶ。
【0050】
指示出力決定手段86は、前記車両要求パワーPreqとエンジン動作曲線設定手段84により選択され予め設定されたエンジン動作曲線とに基づいて、前記エンジン指示出力Petと電動機MGに対する出力指示値である電動機指示出力Pmgtとを逐次決定する。例えばエンジン12の暖機過程では、先ず、予め設定されている前記暖機完了後のエンジン出力割合RPeと前記車両要求パワーPreqとに基づいて、その暖機完了後を想定した基準エンジン指示出力Pet-h(=Preq×RPe)を算出する。その基準エンジン指示出力Pet-hを表す等エンジン出力線は、図5において破線L02で示されている。次に、指示出力決定手段86は、前記暖機完了後のエンジン動作曲線上で上記算出した基準エンジン指示出力Pet-hを発生させるエンジン動作点を求める。すなわち、図5において上記暖機完了後のエンジン動作曲線(図5の実線L03)と前記破線L02との交点hを求める。そして、前記エンジン動作曲線設定手段84により選択された前記暖機過程のエンジン動作曲線(図5の二点鎖線L04)上で、その交点hと同じエンジン回転速度Neとなるエンジン動作点(図5の点c’)を求める。指示出力決定手段86は、このエンジン動作点(点c’)が示すエンジン出力Peを、前記暖機過程におけるエンジン指示出力Petとして決定する。そして、前記車両要求パワーPreqから上記エンジン指示出力Petを差し引いて得た出力を前記電動機指示出力Pmgtとして決定する。このようにして電動機指示出力Pmgtが決定されるので、後述の走行用出力制御手段88は、実際のエンジン出力Peと電動機出力Pmgとの和である前記駆動用総出力Pemが上記車両要求パワーPreqとなるように、電動機MGを作動させることになる。なお、前記エンジン12の低温状態においても上記暖機過程の場合と同様にして、エンジン指示出力Petと電動機指示出力Pmgtとを決定する。
【0051】
走行用出力制御手段88は、指示出力決定手段86により決定されたエンジン指示出力Petと電動機指示出力Pmgtとを、エンジン12と電動機MGとにそれぞれ逐次出力させる。すなわち、上記エンジン指示出力Petおよび電動機指示出力Pmgtが、エンジン動作曲線設定手段84により予め設定されたエンジン動作曲線に基づいて決定されるので、走行用出力制御手段88は、その予め設定されたエンジン動作曲線に従ってエンジン12を制御する。例えばエンジン12の暖機過程において、上記のように図5のエンジン動作点c’に基づいてエンジン指示出力Petが決定されたのであれば、その点c’が示すエンジントルクTeが目標エンジントルクTetであり、走行用出力制御手段88は、その目標エンジントルクTetを発生させるようにエンジン12を制御する。
【0052】
また、走行用出力制御手段88は、エンジン指示出力Petと電動機指示出力Pmgtとに基づいてエンジン12と電動機MGとを作動させてもなお、車両要求パワーPreqに対して実際の駆動用総出力Pemが出力差を有する場合には、その出力差を零に近付けるようにフィードバック制御でエンジン出力Peと電動機出力Pmgとの一方または両方を微調整する。例えば、上記出力差は、トルクコンバータ16の速度比、または、車両8の加速度などから求められる。
【0053】
図8は、所定の車両要求パワーPreqに一致するように駆動用総出力Pemが発生させられた場合において、エンジン温度TEMPegに応じたその駆動用総出力Pemの内訳を模式的に表した図である。図9は、エンジン12の前記暖機完了後、前記暖機過程、前記低温状態のそれぞれの場合において、その図8に示される駆動用総出力Pemの内訳を棒グラフで例示した図である。この図8および図9では、前記暖機完了判定温度TEMP1はT0〔℃〕であり、前記エンジン暖機過程温度範囲WTemdはT1〜T0〔℃〕であり、前記エンジン低温温度範囲WTeloはT2〜T1〔℃〕である。図8および図9では、例えば車両要求パワーPreqを1としたときのエンジン出力Pe(=Peo+ΔPe)がエンジン出力割合RPeに相当し、その車両要求パワーPreqを1としたときの電動機出力Pmg(=Pmb+ΔPm)が電動機出力割合RPmgに相当する。そして、図8にて、エンジン温度TEMPegを前記暖機完了後と仮定したときのエンジン指示出力Pet(=Pe)が、前記基準エンジン指示出力Pet-hである。なお、図9のMGとは、電動機MGを意味している。
【0054】
図8に示すように、前記暖機完了後においては、エンジン出力Peはエンジン指示出力Petに対して不足せず、前記補正エンジン出力ΔPeは不要であるので、エンジン出力Peの内訳は、エンジン指示出力Petに対するエンジン実出力Peo(以下、指示出力対応エンジン実出力Peoという)だけである。要するに、エンジン出力Pe(=Peo)は、補正エンジン出力ΔPe無しで、エンジン指示出力Petに一致している。図8に示す基準電動機出力Pmbは、予め設定されている前記暖機完了後の電動機出力割合RPmgに対応した電動機出力Pmgであり、エンジン温度TEMPegの関数にはなっていない。
【0055】
また、エンジン12の暖機過程および低温状態では、エンジン出力Peがエンジン指示出力Petに対して不足することがあるので、エンジン出力Peは、前記指示出力対応エンジン実出力Peoと前記補正エンジン出力ΔPeとを併せたものとなっている。要するに、図8および図9ではエンジン出力Peは、補正エンジン出力ΔPeによって、エンジン指示出力Petに一致したものとなっている。上記暖機過程における上記指示出力対応エンジン実出力Peoに対応したエンジン動作点を、例えば図5に表すとすれば点cになる。
【0056】
そして、図5においてエンジン動作点c’が示すエンジン出力Peの方がエンジン動作点hが示すエンジン出力Peよりも小さいことから判るように、上記暖機過程および上記低温状態では、エンジン出力割合RPeは前記暖機完了後よりも小さくされるので、それを補うために、図8に示すように、前記基準電動機出力Pmbに電動機出力加算分ΔPmが加算されたものが電動機出力Pmgとなっている。すなわち、上記暖機過程および上記低温状態では、エンジン動作曲線設定手段84が前記エンジン動作曲線をエンジン12の暖機完了後よりも低エンジントルク側にずらして設定するため、走行用出力制御手段88は、図8に示すように、エンジン出力Peと電動機出力Pmgとの和に対する前記エンジン出力割合RPeを上記暖機完了後よりも小さくすることになる。更に詳しく言えば、上記暖機過程では、エンジン動作曲線設定手段84が、エンジン温度TEMPegが低いほどエンジン動作曲線を低エンジントルク側にずらすので、それに起因して、走行用出力制御手段88は、図8に示すように、エンジン温度TEMPegが低いほど上記エンジン出力割合RPeを小さくする。その一方で、上記低温状態では、エンジン動作曲線設定手段84が、エンジン温度TEMPegが低いほどエンジン動作曲線を高エンジントルク側にずらすので、それに起因して、走行用出力制御手段88は、図8に示すように、エンジン温度TEMPegが低いほど上記エンジン出力割合RPeを大きくする。
【0057】
また、図9に示すように、エンジン12の低温状態では、エンジン12の暖機過程と比較してより低温であるので、エンジン出力Pe全体に占める補正エンジン出力ΔPeの比率が大きくなっている。
【0058】
また、上記低温状態においてエンジン動作曲線が、前記暖機完了後のエンジン動作曲線(例えば図5の実線L03)を超えて高エンジントルク側にずらされることはないので、基本的に電動機出力Pmgが前記基準電動機出力Pmbを下回ることはない。しかし、低温に起因した蓄電装置57の出力制限によって電動機MGに基準電動機出力Pmbを発生させることができないときには、図8の一点鎖線L05のように、電動機出力Pmgが基準電動機出力Pmbを下回って電動機MGが駆動されると共に、その電動機出力Pmgの不足分をエンジン出力Peで補っても差し支えない。
【0059】
図10は、電子制御装置58の制御作動の要部、すなわち、エンジン12の暖機過程においてエンジン12の出力制御を行う制御作動を説明するためのフローチャートであり、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。この図10に示す制御作動は、単独で或いは他の制御作動と並列的に実行される。また、図10に示す制御作動は、前記EHV走行モードでの車両走行中に実行される。
【0060】
先ず、図10のステップ(以下、「ステップ」を省略する)SA1では、車両8の要求出力Preqすなわち車両要求パワーPreqが、例えばアクセル開度Acc等に基づいて決定される。SA1の次はSA2に移る。なお、SA1は車両要求出力決定手段80に対応する。
【0061】
暖機完了判断手段82に対応するSA2においては、エンジン12の暖機が完了したか否かが判断される。具体的には、エンジン温度TEMPegが前記暖機完了判定温度TEMP1以上である場合に、エンジン12の暖機が完了したと判断される。このSA2の判断が肯定された場合、すなわち、エンジン12の暖機が完了した場合には、本フローチャートは終了する。一方、このSA2の判断が否定された場合には、SA3に移る。
【0062】
エンジン動作曲線設定手段84に対応するSA3においては、エンジン12の制御に用いられる前記エンジン動作曲線が、エンジン温度TEMPegに基づいて前記エンジン動作曲線マップから選択される。SA3の次はSA4に移る。
【0063】
指示出力決定手段86に対応するSA4においては、前記エンジン指示出力Petと前記電動機指示出力Pmgtとが、SA1にて決定された車両要求パワーPreqとSA3にて選択された前記エンジン動作曲線とに基づいて決定される。SA4の次はSA5に移る。
【0064】
走行用出力制御手段88に対応するSA5においては、エンジン12が、SA4にて決定されたエンジン指示出力Petを発生させるように駆動される。それと共に、電動機MGが、SA4にて決定された電動機指示出力Pmgtを発生させるように駆動される。SA5の次はSA6に移る。
【0065】
走行用出力制御手段88に対応するSA6においては、実際の駆動用総出力Pemの車両要求パワーPreqに対する過不足分を零に近付けるように、エンジン出力Peと電動機出力Pmgとの一方または両方が、前記フィードバック制御で微調整される。
【0066】
本実施例では次のような効果(A1)乃至(A5)がある。(A1)本実施例によれば、走行用出力制御手段88は、エンジン12の暖機過程では、前記エンジン出力割合RPeをエンジン12の暖機完了後よりも小さくし、エンジン出力Peと電動機出力Pmgとの和である前記駆動用総出力Pemが前記車両要求パワーPreqとなるように電動機MGを作動させる。そのため、エンジン12の暖機過程では、そのエンジン12の暖機完了後と比較して、エンジン12の冷却による熱損失が拡大するところ、その冷却による熱損失が抑えられる。従って、エンジン12の暖機過程における車両8の燃費悪化を抑制することができる。
【0067】
(A2)また、本実施例によれば、エンジン12の暖機過程では、走行用出力制御手段88は、図8に示すように、エンジン温度TEMPegが低いほどエンジン出力割合RPeを小さくする。従って、エンジン12の冷却による熱損失がエンジン温度TEMPegが低いほど拡大するのに合わせて、車両8の燃費悪化を抑制できるように、エンジン出力Peを過不足なく得ることが可能である。
【0068】
(A3)また、本実施例によれば、走行用出力制御手段88は、予め設定されたエンジン動作曲線に従ってエンジン12を制御しており、エンジン動作曲線設定手段84は、エンジン12の暖機過程では、図5,図6に示すように、上記エンジン動作曲線をエンジン12の暖機完了後よりも低エンジントルク側に設定する。ここで、エンジン12の熱効率の良い作動領域はエンジン温度TEMPegが低いほど低エンジントルク側にずれる。従って、エンジン12の暖機過程では、その熱効率の良い作動領域のずれに合わせて上記エンジン動作曲線が設定されることになり、エンジン12を燃費良く作動させることができる。
【0069】
(A4)また、本実施例によれば、エンジン動作曲線設定手段84は、エンジン12の暖機過程では、前記エンジン動作曲線から定まるアイドリング回転速度Neidl(図6参照)をエンジン12の暖機完了後のアイドリング回転速度Neidlに一致させるようにしつつ、エンジン温度TEMPegが低いほど、エンジン制御に用いるエンジン動作曲線をより低エンジントルク側に設定する。従って、上記暖機過程において、エンジン温度TEMPegに応じた熱効率の良い領域でエンジン12を作動させ、車両12の燃費悪化を抑制することが可能である。例えば図11において矢印AR03で示すように、エンジン12の暖機過程で用いられる前記エンジン動作曲線が、前記暖機完了後よりも高エンジン回転速度側にずらされ、エンジン温度TEMPegが低いほど高エンジン回転速度側にずらされて設定されるものとした場合と比較して、本実施例の電子制御装置58は、車両12の燃費悪化を抑制することが可能である。具体的には、本実施例における前記暖機過程でのエンジン動作曲線の設定(図6参照)では、エンジン12の中高負荷領域において、エンジン12が低トルク化されるので、エンジン冷却水へ移る熱量が減りエンジン12の冷却損失が低減されて、上記燃費悪化を抑制することが可能である。また、エンジン12の低負荷領域おいて、エンジン12が高回転化させられるものではないので、エンジン12のフリクション増大が回避され、上記燃費悪化を抑制することが可能である。また、前記暖機過程でのアイドリング回転速度Neidlが前記暖機完了後と変わらないので、その暖機過程においてアイドリング時の燃料消費が増えることなく、上記燃費悪化を抑制することが可能である。
【0070】
(A5)また、本実施例によれば、エンジン12の暖機過程に対応して予め定められた前記エンジン暖機過程温度範囲WTemdの下限温度よりも低温側の前記エンジン低温温度範囲WTelo(図8参照)では、エンジン動作曲線設定手段84は、上記エンジン暖機過程温度範囲WTemdの下限温度に対応するエンジン動作曲線と前記暖機完了後のエンジン動作曲線との間で、エンジン温度TEMPegが低いほど、エンジン制御に用いるエンジン動作曲線をより高エンジントルク側に設定する。これにより、走行用出力制御手段88は、上記エンジン低温温度範囲WTeloでは、図8に示すように、エンジン温度TEMPegが低いほどエンジン出力割合RPeを大きくする。従って、蓄電装置57などの電力供給源から電動機MGが受ける電力が低温により制限されたとしても、エンジン12および電動機MGが出力不足にならないようにそれらを作動させることが可能である。
【0071】
次に、本発明の他の実施例について説明する。なお、以下の実施例の説明において、実施例相互に重複する部分については、同一の符号を付してその説明を省略する。
【実施例2】
【0072】
図12は、本発明が適用される車両用駆動装置208を説明するための骨子図である。図12に示すように、車両用駆動装置208は、走行用の動力を出力する一般的に知られた自動車用ガソリンエンジンまたはディーゼルエンジンであるエンジン12と、そのエンジン12と駆動輪240(図13参照)との間に介装された車両用動力伝達装置210(以下、「動力伝達装置210」という)とを備えている。動力伝達装置210はエンジン12からの駆動力を駆動輪240に伝達するトランスアクスルである。そして、動力伝達装置210は、車体に取り付けられる非回転部材としてのトランスアクスル(T/A)ケース212(以下、「ケース212」という)内において、エンジン12側から順番に、そのエンジン12の出力軸であるエンジン出力軸26(例えばクランク軸)に作動的に連結されてエンジン12からのトルク変動等による脈動を吸収するダンパー216、そのダンパー216を介してエンジン12によって回転駆動させられる入力軸218、第1電動機MG1、動力分配機構として機能する第1遊星歯車装置220、減速装置として機能する第2遊星歯車装置222、および、駆動輪240に動力伝達可能に連結された第2電動機MG2を備えている。
【0073】
この動力伝達装置210は、例えば前輪駆動すなわちFF(フロントエンジン・フロントドライブ)型の車両206の前方に横置きされ、駆動輪240を駆動するために好適に用いられるものである。動力伝達装置210では、エンジン12の動力がカウンタギヤ対232の一方を構成する動力伝達装置210の出力回転部材としての出力歯車224からカウンタギヤ対232、ファイナルギヤ対234、差動歯車装置(終減速機)236および一対の車軸238等を順次介して一対の駆動輪240へ伝達される(図13参照)。このように、本実施例では、入力軸218とエンジン12とはダンパー216を介して作動的に連結されており、エンジン出力軸26がエンジン12の出力回転部材であることはもちろんであるが、この入力軸218もエンジン12の出力回転部材に相当する。図12に示されているように、車両用駆動装置208はトルクコンバータのような流体伝動装置を備えていない。
【0074】
入力軸218は、両端がボールベアリング226および228によって回転可能に支持されており、一端がダンパー216を介してエンジン12に連結されることでエンジン12により回転駆動させられる。また、他端には潤滑油供給装置としてのオイルポンプ230が連結されており入力軸218が回転駆動されることによりオイルポンプ230が回転駆動させられて、動力伝達装置210の各部例えば第1遊星歯車装置220、第2遊星歯車装置222、ボールベアリング226、および228等に潤滑油が供給される。
【0075】
第1遊星歯車装置220は、エンジン12と駆動輪240との間の動力伝達経路の一部を構成しており、エンジン12からの動力を駆動輪240へ出力する差動機構である。そして、第1遊星歯車装置220は、第1電動機MG1により差動状態が制御される電気式差動機構として機能する。具体的に、第1遊星歯車装置220は、シングルピニオン型の遊星歯車装置であり、第1サンギヤS1、第1ピニオンギヤP1、その第1ピニオンギヤP1を自転および公転可能に支持する第1キャリヤCA1、および、第1ピニオンギヤP1を介して第1サンギヤS1と噛み合う第1リングギヤR1を回転要素(要素)として備えている。第1遊星歯車装置220のギヤ比ρ1は、第1サンギヤS1の歯数をZS1とし第1リングギヤR1の歯数をZR1とすれば、「ρ1=ZS1/ZR1」で算出される。
【0076】
そして、第1遊星歯車装置220は、入力軸218に伝達されたエンジン12の出力を機械的に分配する機械的な動力分配機構であって、エンジン12の出力を第1電動機MG1および出力歯車224に分配する。つまり、この第1遊星歯車装置220においては、第1回転要素としての第1キャリヤCA1は入力軸218すなわちエンジン12に連結され、第2回転要素としての第1サンギヤS1は第1電動機MG1に連結され、第3回転要素としての第1リングギヤR1は出力歯車224すなわちその出力歯車224に作動的に連結された駆動輪240に連結されている。これより、第1サンギヤS1、第1キャリヤCA1、第1リングギヤR1は、それぞれ相互に相対回転可能となることから、エンジン12の出力が第1電動機MG1および出力歯車224に分配されると共に、第1電動機MG1に分配されたエンジン12の出力で第1電動機MG1が発電され、その発電された電気エネルギが蓄電されたりその電気エネルギで第2電動機MG2が回転駆動されるので、動力伝達装置210は、例えば無段変速状態(電気的CVT状態)とされて、第1遊星歯車装置220の差動状態が第1電動機MG1により制御されることにより、エンジン12の所定回転に拘わらず出力歯車224の回転が連続的に変化させられる電気的な無段変速機として機能する。また、第1遊星歯車装置220では、第1電動機MG1が無負荷状態とされて空転させられることで第1キャリヤCA1と第1リングギヤR1との間の動力伝達が遮断されるので、第1遊星歯車装置220は、エンジン12と駆動輪240との間の動力伝達を遮断可能な動力伝達遮断装置としても機能する。
【0077】
第2遊星歯車装置222は、シングルピニオン型の遊星歯車装置である。第2遊星歯車装置222は、第2サンギヤS2、第2ピニオンギヤP2、その第2ピニオンギヤP2を自転および公転可能に支持する第2キャリヤCA2、および、第2ピニオンギヤP2を介して第2サンギヤS2と噛み合う第2リングギヤR2を回転要素として備えている。なお、第1遊星歯車装置220のリングギヤR1および第2遊星歯車装置222のリングギヤR2は一体化された複合歯車となっており、その外周部に出力歯車224が設けられている。そのため、本実施例では、リングギヤR1の回転速度Nr1とリングギヤR2の回転速度Nr2と出力歯車224の回転速度Noutとは互いに同一である。
【0078】
この第2遊星歯車装置222においては、第2キャリヤCA2は非回転部材であるケース212に連結されることで回転が阻止され、第2サンギヤS2は第2電動機MG2に連結され、第2リングギヤR2は出力歯車224に連結されている。すなわち、第2電動機MG2は出力歯車224と第1遊星歯車装置220のリングギヤR1とに第2遊星歯車装置222を介して連結されている。これにより、例えば発進時などは第2電動機MG2が回転駆動することにより、第2サンギヤS2が回転させられ、第2遊星歯車装置222によって減速させられて出力歯車224に回転が伝達される。
【0079】
本実施例の第1電動機MG1及び第2電動機MG2は何れも、発電機能をも有する所謂モータジェネレータである。具体的に第1電動機MG1及び第2電動機MG2は、周方向に配設された複数の永久磁石と回転軸とを含むロータと、回転軸心まわりに回転磁界を形成する三相コイルが巻回された非回転部材のステータとを備えた同期電動発電機である。第1電動機MG1及び第2電動機MG2では、上記複数の永久磁石が発生させる磁界と上記三相コイルが発生させる磁界との相互作用により上記ロータが回転駆動され、或いは、それらの相互作用により上記三相コイルの端子間に起電力が生じさせられる。このような構成から、第1電動機MG1及び第2電動機MG2は、上記三相コイルに通電される駆動電流が大きいほど、大きなトルクを発生させる。第1電動機MG1及び第2電動機MG2はそれぞれインバータ56(図13参照)を介して蓄電装置57に電気的に接続されており、第1電動機MG1と第2電動機MG2と蓄電装置57とは相互に電力授受可能な構成となっている。差動用電動機として機能する第1電動機MG1は反力を発生させるためのジェネレータ(発電)機能を少なくとも備えている。また、走行用電動機として機能する第2電動機MG2は車両206の駆動力を出力するためのモータ(電動機)機能を少なくとも備えており、駆動輪240へ走行用の動力を出力する。上記蓄電装置57は、例えば、鉛蓄電池などのバッテリ(二次電池)又はキャパシタなどであって、第1電動機MG1及び第2電動機MG2に電力を供給し且つそれらの各電動機MG1,MG2から電力の供給を受けることが可能な電気エネルギ源である。
【0080】
上述のように構成された車両用駆動装置208では、電子制御装置258(図13参照)は、例えば、キーがキースロットに挿入された後、フットブレーキ244が操作された状態でパワースイッチが操作されることにより制御が起動されると、アクセルペダル71(図13参照)の操作に応じて駆動力を発生させる。例えば、電子制御装置258は、エンジン12を停止し専ら第2電動機MG2を駆動源とするモータ走行モード(EV走行モード)、エンジン12の動力を機械的に駆動輪240に伝えて走行するEHV走行モード等を、走行状態に応じて切り換える。そのEHV走行モードでは、エンジン12と共に第2電動機MG2も必要に応じて駆動状態とされて第2電動機MG2がアシストトルクを出力することがある。
【0081】
また、電子制御装置258は、上記EHV走行モードでは、エンジン12が例えば前記エンジン燃費最適ライン等の予め定められたエンジン動作曲線に従って作動するように第1電動機MG1によってエンジン12の回転速度Ne(以下、エンジン回転速度Neという)を制御する。このとき、電子制御装置258は、エンジン回転速度Neの制御及び第1電動機MG1の発電量の制御に伴い、第1遊星歯車装置220の変速比γ0(=入力軸218の回転速度/出力歯車224の回転速度)をその変速可能な変化範囲内で無段階に制御する。すなわち、第1電動機MG1により第1遊星歯車装置220の差動状態を連続的に制御する。
【0082】
また、後進走行は、例えば、第2電動機MG2を逆方向へ回転駆動することによって達成される。このとき、電子制御装置258は、第1電動機MG1は空転状態として、エンジン12の作動状態に関係なく出力歯車224が逆回転することを許容する。
【0083】
さらに、電子制御装置258は、コースト走行時には車両206の有する慣性エネルギーで第2電動機MG2を回転駆動することにより電力として回生し、蓄電装置57にその電力を蓄える。
【0084】
また、電子制御装置258は、前記モータ走行モードでは、エンジン12の運転を停止した状態で蓄電装置57からの電力により第2電動機MG2を駆動してその第2電動機MG2のみを車両206の駆動力源とする。このモータ走行モードでは、運転を停止しているエンジン12の引き摺りを抑制して燃費を向上させるために、例えば第1電動機MG1を無負荷状態とすることにより空転させて、第1遊星歯車装置220の差動作用によりエンジン回転速度Neを零乃至略零に維持する。つまり、モータ走行モードでは、エンジン12の運転が単に停止させられるだけではなく、エンジン12の回転も停止させられる。
【0085】
図13は、本実施例の車両用駆動装置208を制御するための制御装置として機能する電子制御装置258に入力される信号を例示した図であると共に、電子制御装置258に備えられた制御機能の要部を説明するための機能ブロック線図である。この電子制御装置258は、CPU、ROM、RAM、及び入出力インターフェースなどから成る所謂マイクロコンピュータを含んで構成されており、RAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従って信号処理を行うことによりエンジン12、第1電動機MG1、第2電動機MG2に関するハイブリッド駆動制御等の車両制御を実行するものである。
【0086】
電子制御装置258には、図13に示すような各センサやスイッチなどから、エンジン12のシリンダブロックに設けられたエンジン水温センサ70からのエンジン水温TEMPwを表す信号、エンジン回転速度Neを表すエンジン回転速度センサ64からの信号、出力歯車224の回転速度Nout(以下、「出力回転速度Nout」という)に対応する車速Vを表す車速センサ252からの信号、常用ブレーキであるフットブレーキ244の操作の有無を検出するためのブレーキスイッチ246からのフットブレーキ操作を表す信号、アクセルペダル71の操作量であるアクセル開度Accを表すアクセル開度センサ60からの信号、エンジン12の吸気管に設けられエンジン12の吸入空気量を電動で調節する電子スロットル弁のスロットル開度θthを表すスロットル弁開度センサ242からの信号、第1電動機MG1の回転速度Ng(以下、「第1電動機回転速度Ng」という)を表す信号、第2電動機MG2の回転速度Nm(以下、「第2電動機回転速度Nm」という)を表す信号、蓄電装置57の充電残量(充電状態)SOCを表す信号、シフトレバーの操作位置(操作ポジション)POPEを検出する為の位置センサであるレバー操作位置センサ248からの操作ポジションPOPEに応じたシフトレバー位置信号、第1電動機MG1のトルクTg(以下、「第1電動機トルクTg」という)に対応する第1電動機MG1の駆動電流を表す信号、第2電動機MG2のトルクTm(以下、「第2電動機トルクTm」という)に対応する第2電動機MG2の駆動電流を表す信号、水冷のインバータ56の温度すなわちインバータ水温TEMPinvを表す信号等が、それぞれ供給される。なお、第1電動機MG1が発電する際には、上記第1電動機MG1の駆動電流を第1電動機MG1の発電電流と呼んでもよい。
【0087】
また、電子制御装置258からは、エンジン出力を制御するエンジン出力制御のための制御信号例えば前記電子スロットル弁のスロットル開度θthを操作するスロットルアクチュエータへの駆動信号やエンジン12の燃料噴射装置による吸気管或いはエンジン12の筒内への燃料供給量を制御する燃料供給量信号やエンジン12の点火装置によるエンジン12の点火時期を指令する点火信号、各電動機MG1,MG2の作動を指令する指令信号等が、それぞれ出力される。電子制御装置258は、スロットル開度θthをアクセル開度Accに応じて調節するスロットル制御では、予め定められた関係に従ってアクセル開度Accが増加するほどスロットル開度θthを増加させる。そのスロットル開度θthの増加に伴いエンジン12に吸入される吸入空気量も増加する。
【0088】
図13に示すように、本実施例の電子制御装置258は、前述の実施例1の電子制御装置58と同様に、車両要求出力決定手段80と暖機完了判断手段82とエンジン動作曲線設定手段84とを備えており、その実施例1の指示出力決定手段86と走行用出力制御手段88とに替えて、指示出力決定部としての指示出力決定手段262と、走行用出力制御部としての走行用出力制御手段264とを備えている。なお、実施例1の走行用電動機である電動機MGには、本実施例の第2電動機MG2が相当するので、本実施例では、前記車両要求パワーPreqとは、エンジン出力Peと第2電動機MG2の出力Pm(以下、第2電動機出力Pmという)との合計の目標値である。また、前記エンジン出力割合RPeとは、エンジン出力Peと第2電動機出力Pmとの和に対するエンジン出力Peの割合である。また、前記電動機出力割合RPmgとは、エンジン出力Peと第2電動機出力Pmとの和に対する第2電動機出力Pmの割合である。また、第2電動機MG2に対する出力指示値である第2電動機指示出力Pmtは、実施例1の電動機指示出力Pmgtに対応する。
【0089】
指示出力決定手段262は、実施例1の指示出力決定手段86と同様に、前記車両要求パワーPreqとエンジン動作曲線設定手段84により選択され予め設定されたエンジン動作曲線とに基づいて、前記エンジン指示出力Petと前記第2電動機指示出力Pmtとを逐次決定する。ただ、エンジン12の暖機過程においてそのエンジン指示出力Petと第2電動機指示出力Pmtとを決定する方法が、上記実施例1の指示出力決定手段86とは異なるので、その異なる点に関して、図14を用いて説明する。図14は、図5と同様に前記エンジン動作曲線を表した図であって、本実施例におけるエンジン指示出力Petおよび第2電動機指示出力Pmtの決定方法を説明するための図である。図14において図5と共通する符号はその図5におけるものと同じものを表している。具体的に、指示出力決定手段262は、エンジン12の暖機過程では、先ず、予め設定されている前記暖機完了後のエンジン出力割合RPeと前記車両要求パワーPreqとに基づいて、その暖機完了後を想定した基準エンジン指示出力Pet-hを算出する。その基準エンジン指示出力Pet-hを表す等エンジン出力線は、図14において破線L02で示されている。次に、指示出力決定手段262は、前記暖機完了後のエンジン動作曲線上で上記算出した基準エンジン指示出力Pet-hを発生させるエンジン動作点を求める。すなわち、図14において上記暖機完了後のエンジン動作曲線(図14の実線L03)と前記破線L02との交点hを求める。この交点hを求めることまでに関しては上記実施例1の指示出力決定手段86と同様である。そして、指示出力決定手段262は、上記交点hであるエンジン動作点から、そのエンジン動作点(交点h)が示すエンジン回転速度N1を求める。このエンジン回転速度N1は、図14のような線図上で前記車両要求パワーPreqと前記暖機完了後のエンジン動作曲線(図14の実線L03)とから導き出されるので、その車両要求パワーPreqに基づいて想定される上記暖機完了後のエンジン回転速度、すなわち暖機後想定エンジン回転速度N1であると言える。指示出力決定手段262は、その暖機後想定エンジン回転速度N1を求めると、次に、予め実験的に定められた回転速度加算量ΔNe(>0)を上記暖機後想定エンジン回転速度N1に加えて得た値を暖機前エンジン回転速度N2として算出する。その回転速度加算量ΔNeは、例えば車両要求パワーPreqに応じて増減されても良いが、本実施例では零よりも大きい一定値とされており、前記暖機過程での殆どのエンジン温度範囲においてエンジン指示出力Petが前記基準エンジン指示出力Pet-hを下回って決定されるように設定されている。指示出力決定手段262は、上記暖機前エンジン回転速度N2を算出すると、前記エンジン動作曲線設定手段84により選択された前記暖機過程のエンジン動作曲線(図14の二点鎖線L04)上で、エンジン回転速度Neが上記暖機前エンジン回転速度N2となるエンジン動作点(図14の点c'')を求める。指示出力決定手段262は、このエンジン動作点(点c'')が示すエンジン出力Peを、前記基準エンジン指示出力Pet-hを超えない範囲内で、前記暖機過程におけるエンジン指示出力Petとして決定する。そして、前記車両要求パワーPreqから上記エンジン指示出力Petを差し引いて得た出力を前記第2電動機指示出力Pmtとして決定する。このようにして第2電動機指示出力Pmtが決定されるので、後述の走行用出力制御手段264は、実際のエンジン出力Peと第2電動機出力Pmとの和が上記車両要求パワーPreqとなるように、第2電動機MG2を作動させることになる。なお、前記エンジン12の低温状態においても上記暖機過程の場合と同様にして、エンジン指示出力Petと第2電動機指示出力Pmtとを決定する。
【0090】
走行用出力制御手段264は、実施例1の走行用出力制御手段88と同様に、指示出力決定手段262により決定されたエンジン指示出力Petと第2電動機指示出力Pmtとを、エンジン12と第2電動機MG2とにそれぞれ逐次出力させる。すなわち、上記エンジン指示出力Petおよび第2電動機指示出力Pmtが、エンジン動作曲線設定手段84により予め設定されたエンジン動作曲線に基づいて決定されるので、走行用出力制御手段264は、その予め設定されたエンジン動作曲線に従ってエンジン12を制御する。例えばエンジン12の暖機過程において、上記のように図14のエンジン動作点c''に基づいてエンジン指示出力Petが決定されたのであれば、その点c''が示すエンジントルクTeが目標エンジントルクTetであり、走行用出力制御手段264は、その目標エンジントルクTetを発生させるようにエンジン12を制御する。それと共に、走行用出力制御手段264は、その点c''が示すエンジン回転速度Neを目標エンジン回転速度Netとして、実際のエンジン回転速度Neをその目標エンジン回転速度Netに収束させるように第1電動機MG1により第1遊星歯車装置220の差動状態を制御する。例えば、走行用出力制御手段264は、エンジン出力Peを補正する際、すなわち、補正エンジン出力ΔPeを出力させる際に、第1電動機MG1を制御することにより、エンジン回転速度Neを図14の点cが示すN1から点c''が示すN2へと上昇させる。
【0091】
また、走行用出力制御手段264は、エンジン指示出力Petと第2電動機指示出力Pmtとに基づいてエンジン12と第2電動機MG2とを作動させてもなお、実際のエンジン出力Peと第2電動機出力Pmとの合計が車両要求パワーPreqに対して出力差を有する場合には、その出力差を零に近付けるようにフィードバック制御でエンジン出力Peと第2電動機出力Pmとの一方または両方を微調整する。
【0092】
前記EHV走行モードでは、以上のようにしてエンジン12等が制御されており、エンジン12の前記暖機過程および前記低温状態では、前述の実施例1と同様に、エンジン動作曲線設定手段84が前記エンジン動作曲線をエンジン12の暖機完了後よりも低エンジントルク側にずらして設定するので、走行用出力制御手段264は、図8に示すように、エンジン出力割合RPeを上記暖機完了後よりも小さくすることになる。そして、上記暖機過程では、エンジン動作曲線設定手段84が、エンジン温度TEMPegが低いほどエンジン動作曲線を低エンジントルク側にずらすので、それに起因して、走行用出力制御手段264は、図8に示すように、エンジン温度TEMPegが低いほどエンジン出力割合RPeを小さくする。その一方で、上記低温状態では、エンジン動作曲線設定手段84が、エンジン温度TEMPegが低いほどエンジン動作曲線を高エンジントルク側にずらすので、それに起因して、走行用出力制御手段264は、図8に示すように、エンジン温度TEMPegが低いほどエンジン出力割合RPeを大きくする。なお、本実施例でも、エンジン出力Pe(=Peo+ΔPe)および第2電動機出力Pm(=Pmb+ΔPm)の内訳は、実施例1で説明した図8および図9のようになっている。
【0093】
また、上述したように、指示出力決定手段262がエンジン12の暖機過程及び低温状態においてエンジン指示出力Petを決定する際には、例えば図14において点hであるエンジン動作点が示すエンジン回転速度N1よりも、エンジン指示出力Petに対応した点c''であるエンジン動作点が示すエンジン回転速度N2の方が高くされる。従って、そのエンジン指示出力Petに従ってエンジン12を制御する走行用出力制御手段264は、前記暖機過程及び低温状態では、エンジン回転速度Neが、前記車両要求パワーPreqに基づいて想定される前記暖機完了後のエンジン回転速度N1(暖機後想定エンジン回転速度N1)よりも高くなるように、エンジン出力Peを制御すると言える。
【0094】
図15は、本実施例の電子制御装置258の制御作動の要部、すなわち、エンジン12の暖機過程においてエンジン12の出力制御を行う制御作動を説明するためのフローチャートであり、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。この図15に示す制御作動は、単独で或いは他の制御作動と並列的に実行される。また、図15に示す制御作動は、前記EHV走行モードでの車両走行中に実行される。図15のSB1〜SB3は実施例1の図10のSA1〜SA3と同じ内容であるので、SB4から説明する。
【0095】
SB4においては、前記基準エンジン指示出力Pet-hが前記車両要求パワーPreqから算出される。この基準エンジン指示出力Pet-hを表す等エンジン出力線は、例えば図14において破線L02で示されている。そして、その基準エンジン指示出力Pet-hと前記暖機完了後のエンジン動作曲線とから、前記暖機後想定エンジン回転速度N1が求められる。更に、その暖機後想定エンジン回転速度N1に前記回転速度加算量ΔNeを加えて得た値が、前記暖機前エンジン回転速度N2として算出される。SB4の次はSB5に移る。
【0096】
SB5においては、SB4にて算出された暖機前エンジン回転速度N2と、SB3にて選択された前記エンジン動作曲線とに基づいて、エンジン指示出力Petが、前記基準エンジン指示出力Pet-hを超えない範囲内で決定される。そして、第2電動機指示出力Pmtが、そのエンジン指示出力PetとSB1にて決定された車両要求パワーPreqとに基づいて決定される。SB5の次はSB6に移る。なお、SB4およびSB5は指示出力決定手段262に対応する。
【0097】
走行用出力制御手段264に対応するSB6においては、SB5にて決定されたエンジン指示出力Petをエンジン12が発生させるように、エンジン12と第1電動機MG1とが作動させられる。それと共に、第2電動機MG2が、SB5にて決定された第2電動機指示出力Pmtを発生させるように作動させられる。SB6の次はSB7に移る。
【0098】
走行用出力制御手段264に対応するSB7においては、実際のエンジン出力Peと第2電動機出力Pmとの合計の車両要求パワーPreqに対する過不足分を零に近付けるように、エンジン出力Peと第2電動機出力Pmとの一方または両方が、前記フィードバック制御で微調整される。
【0099】
本実施例では、前述の実施例1の効果(A1)〜(A5)に加え、更に次のような効果(B1)がある。(B1)本実施例によれば、例えば図14に示すように、走行用出力制御手段264は、エンジン12の暖機過程では、エンジン回転速度Ne(=N2)が、前記車両要求パワーPreqに基づいて想定される前記暖機完了後のエンジン回転速度N1(暖機後想定エンジン回転速度N1)よりも高くなるように、エンジン出力Peを制御する。従って、第1電動機MG1の作動状態が上記想定される暖機完了後のエンジン回転速度N1を前提としたものと比較して発電側に変化するので、走行用駆動力源としての第2電動機MG2の出力を引き上げ易くなる。このことを具体的に説明するための図が図16および図17である。
【0100】
その図16は、低速から中速での車両走行時における第1遊星歯車装置220の差動状態を表した共線図であり、図16(a)は図14のエンジン動作点hでエンジン12が作動させられる場合の各回転要素の回転速度を表しており、図16(b)は図14のエンジン動作点c''でエンジン12が作動させられる場合の各回転要素の回転速度を表している。また、図17は、中速から高速での車両走行時における第1遊星歯車装置220の差動状態を表した共線図であり、図17(a)は図14のエンジン動作点hでエンジン12が作動させられる場合の各回転要素の回転速度を表しており、図17(b)は図14のエンジン動作点c''でエンジン12が作動させられる場合の各回転要素の回転速度を表している。図16、図17において、Tgは第1電動機トルクを表し、Teはエンジントルクを表し、Tmrは出力歯車224に伝達された第2電動機トルクTmである第2電動機換算トルクを表し、Tepは出力歯車224に伝達されたエンジントルクTeすなわちエンジン直達トルクを表している。また、以下の説明を簡潔にするため、図14のエンジン動作点hでエンジン12が作動させられる場合の各回転速度およびトルクを符号で表すときには、符号末尾に「-h」と付し、図14のエンジン動作点c''でエンジン12が作動させられる場合の各回転速度およびトルクを符号で表すときには、符号末尾に「-c''」と付すものとする。なお、図17は、第2電動機MG2が発電し第1電動機MG1が発動機として機能する動力循環状態で例示されているが、その動力循環状態ではなく、第1電動機回転速度Ngが正の値になっている共線図であってもよい。
【0101】
図14のエンジン動作点hとエンジン動作点c''とが示すエンジン回転速度Neを比較すれば判るように、図16および図17では、エンジン回転速度Neは「Ne-h≦Ne-c''」であるので、第1電動機回転速度Ngは「Ng-h≦Ng-c''」となっている。そのため、エンジン回転速度NeがN2であるときの方が、N1であるときと比較して、第1電動機MG1の発電量が増大している。
【0102】
このように、エンジン回転速度NeがN1からN2に引き上げられることで、図16に示す低速から中速での車両走行時には、第1電動機MG1の発電量が増大し、それが第2電動機MG2の出力アップを行い易くしている。また、図17に示す中速から高速での車両走行時には、第2電動機MG2が発電し第1電動機MG1が発動機として機能する動力循環状態で例示されているが、負方向の第1電動機回転速度Ngと負方向の第1電動機トルクTgとの絶対値が何れも減少する(零に近付く)ので、上記動力循環状態において第2電動機MG2から第1電動機MG1へ循環する電気エネルギ(電力)が少なくなっている。すなわち、図16、図17の何れの場合でも、走行用駆動力源としての第2電動機MG2の出力を引き上げ易くなっている。
【0103】
また、図14のエンジン動作点hとエンジン動作点c''とが示すエンジントルクTeを比較すれば判るように、図16および図17では、エンジントルクTeは「Te-h≧Te-c''」であるので、そのエンジントルクTeに対抗する反力トルクである第1電動機トルクTgは「Tg-h≧Tg-c''」であり、エンジン直達トルクTepは「Tep-h≧Tep-c''」となっている。そのため、第2電動機換算トルクTmrは「Tmr-h≦Tmr-c''」となり、エンジン回転速度NeがN2であるときの方が、N1であるときと比較して、第2電動機出力Pmが、駆動輪240を駆動する方向(正方向)に増大させられている。
【0104】
以上、本発明の実施例を図面に基づいて詳細に説明したが、これはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【0105】
例えば、前述の実施例1において、トルクコンバータ16が流体伝動装置として用いられているが、そのトルクコンバータ16のトルク増幅作用は必ずしも必要ではなく、そのトルクコンバータ16がトルク増幅作用のないフルードカップリングに置き換わっていても差し支えない。
【0106】
また、前述の実施例1において、トルクコンバータ16はロックアップクラッチLUを備えているが、そのロックアップクラッチLUを備えていなくても差し支えない。
【0107】
また、前述の実施例1において、自動変速機18は前記クラッチ・ツゥ・クラッチ変速を行う有段式の自動変速機構であるが、変速比を連続的に変化させることができる無段変速機(CVT)であっても差し支えない。
【0108】
また、前述の実施例1において、エンジン12はエンジン断続用クラッチK0を介してトルクコンバータ16のポンプ翼車16pに連結されているが、そのエンジン断続用クラッチK0が設けられておらず、エンジン12がポンプ翼車16pに常に連結されていても差し支えない。
【0109】
また、前述の実施例1,2において、図8に示すように、前記エンジン低温温度範囲WTeloでは、前記エンジン出力割合RPeはエンジン温度TEMPegが低いほど大きくされるが、エンジン温度TEMPegに寄らず一定であってもよいし、前記エンジン暖機過程温度範囲WTemdと同様に、前記エンジン出力割合RPeがエンジン温度TEMPegが低いほど小さくされても差し支えない。例えば、前記車両要求パワーPreqが、軽負荷を判断できるように予め実験的に設定された判定値よりも小さい場合には、電動機MGが低温に起因して出力不足になり難いので、前記エンジン出力割合RPeはエンジン温度TEMPegが低いほど小さくされても差し支えない。
【0110】
また、前述の実施例1において、図10のフローチャートにはSA6が設けられているが、そのSA6は必須ではない。また同様に、前述の実施例2において、図15のフローチャートのSB7も必須ではない。
【0111】
また、前述の実施例1,2において、図8において破線L06で車両要求パワーPreqを分割して示される前記エンジン出力割合RPeと前記電動機出力割合RPmgとは、エンジン動作曲線設定手段84により選択されるエンジン動作曲線に基づいて定まるが、エンジン回転速度Neなどの車両状態およびエンジン温度TEMPegをパラメータとして前記エンジン出力割合RPeと前記電動機出力割合RPmgとを定めた出力割合マップ(例えば図8)が予め設定されていてもよい。そのように上記出力割合マップが予め設定されている場合には、電子制御装置58,258は、その出力割合マップからエンジン温度TEMPegに基づいて決定したエンジン出力Peと電動機出力Pmg(第2電動機出力Pm)とを、フィードフォワード制御によりエンジン12と電動機MG(第2電動機MG2)とにそれぞれ出力させる。このようにしたとすれば、上記出力割合マップから決定したエンジン出力Peと電動機出力Pmg(第2電動機出力Pm)、すなわち、エンジン指示出力Petと電動機指示出力Pmgt(第2電動機指示出力Pmt)とが、車両要求パワーPreqから直ちに決まるので、電子制御装置58,258の制御負荷を軽減することが可能である。
【0112】
また、前述の実施例1,2において、エンジン12の暖機過程においてエンジン制御に用いられるエンジン動作曲線は、図6に示すように、エンジン温度TEMPegが低いほど低エンジントルク方向にずれるが、エンジン温度TEMPegに拘らず固定され、前記暖機完了後のものよりも低エンジントルク方向にずれたエンジン動作曲線であっても差し支えない。
【0113】
また、前述の実施例1,2において、エンジン12は、エンジン動作曲線設定手段84により選択されたエンジン動作曲線に従って制御されるが、エンジン12の暖機過程において前記エンジン出力割合RPeがエンジン12の暖機完了後よりも小さくされれば、ある程度の燃費向上効果があるので、エンジン12が上記エンジン動作曲線に従って制御されることは必須ではない。
【0114】
また、前述の実施例1,2の図8において、前記エンジン出力割合RPeはエンジン温度TEMPegに応じて連続的に変更されるが、段階的に変更されても差し支えない。例えば、前記暖機過程における前記エンジン出力割合RPeが、前記暖機完了後よりも小さい一定値であっても差し支えない。
【0115】
また、前述の実施例2の第1遊星歯車装置220において、第1キャリヤCA1はエンジン12に連結され、第1サンギヤS1は第1電動機MG1に連結され、第1リングギヤR1は出力歯車224に連結されているが、それらの連結関係は、必ずしもそれに限定されるものではなく、エンジン12、第1電動機MG1、出力歯車224は、それぞれ第1遊星歯車装置220の3つの回転要素CA1、S1、R1のうちのいずれと連結されていても差し支えない。
【0116】
また、前述の実施例2において、第2遊星歯車装置222のリングギヤR2は第1遊星歯車装置220のリングギヤR1に対し一体的に連結されているが、上記リングギヤR2の連結先は、上記リングギヤR1に限定されるものではなく、例えば第1遊星歯車装置220の第1キャリヤCA1に連結されていても差し支えない。また、上記リングギヤR2は、上記リングギヤR1ではなく第1遊星歯車装置220と駆動輪240との間の動力伝達経路のどこかに連結されていても差し支えない。
【0117】
また、前述の実施例2において、出力歯車224と駆動輪240との間の動力伝達経路に変速機は設けられていないが、その動力伝達経路に、手動変速機もしくは自動変速機が設けられていても差し支えない。
【0118】
また、前述の実施例2において、入力軸218はダンパー216を介してエンジン12に連結されているが、そのダンパー216が無く、入力軸218が直接に或いは伝動ベルトや歯車等を介してエンジン12に連結されていても差し支えない。
【0119】
また、前述の実施例2の動力伝達装置210において、エンジン12と第1遊星歯車装置220との間にクラッチ等の動力断続装置は設けられていないが、そのような動力断続装置がエンジン12と第1遊星歯車装置220との間に介装されていても差し支えない。また、第1電動機MG1及び第2電動機MG2に関しても同様であり、上記動力断続装置が、第1電動機MG1と第1遊星歯車装置220との間または第2電動機MG2と第2遊星歯車装置222との間に介装されていても差し支えない。
【0120】
また前述の実施例2においては、第1電動機MG1の運転状態が制御されることにより、第1遊星歯車装置220はその変速比が連続的に変化させられる電気的な無段変速機として機能するものであるが、例えば第1遊星歯車装置220の変速比を連続的ではなく差動作用を利用して敢えて段階的に変化させるものであってもよい。
【0121】
また、前述の実施例2において、第1遊星歯車装置220および第2遊星歯車装置222は何れもシングルプラネタリであるが、それらの一方または両方がダブルプラネタリであっても差し支えない。
【0122】
また前述の実施例2においては、第1遊星歯車装置220を構成する第1キャリヤCA1にはエンジン12が動力伝達可能に連結され、第1サンギヤS1には第1電動機MG1が動力伝達可能に連結され、第1リングギヤR1には駆動輪240への動力伝達経路が連結されているが、例えば、第1遊星歯車装置220が2つの遊星歯車装置に置き換えられて、その2つの遊星歯車装置がそれを構成する一部の回転要素で相互に連結された構成において、その遊星歯車装置の回転要素にそれぞれエンジン、電動機、駆動輪が動力伝達可能に連結されており、その遊星歯車装置の回転要素に連結されたクラッチ又はブレーキの制御により有段変速と無段変速とに切換可能な構成であってもよい。
【0123】
また、前述の実施例2の第2電動機MG2はエンジン12から駆動輪240までの動力伝達経路の一部を構成する出力歯車224に第2遊星歯車装置222を介して連結されているが、第2電動機MG2がその出力歯車224に連結されていることに加え、クラッチ等の係合要素を介して第1遊星歯車装置220にも連結可能とされており、第1電動機MG1の代わりに第2電動機MG2によって第1遊星歯車装置220の差動状態を制御可能とする動力伝達装置210の構成であってもよい。
【符号の説明】
【0124】
8,206:車両
10,208:車両用駆動装置
12:エンジン
24,240:駆動輪
58,258:電子制御装置
220:第1遊星歯車装置(電気式差動機構)
MG:電動機(走行用電動機)
MG1:第1電動機(差動用電動機)
MG2:第2電動機(走行用電動機)
【特許請求の範囲】
【請求項1】
エンジンおよび走行用電動機の動力を駆動輪に伝達する車両用駆動装置の制御装置であって、
前記エンジンが暖機完了に至る前の暖機過程では、エンジン出力と前記走行用電動機の出力との和に対するエンジン出力割合を前記エンジンの暖機完了後よりも小さくする
ことを特徴とする車両用駆動装置の制御装置。
【請求項2】
前記車両用駆動装置は、前記エンジンの動力を前記駆動輪へ出力し差動用電動機により差動状態が制御される電気式差動機構を備えており、
前記エンジンの暖機過程では、エンジン回転速度が、車両の要求出力に基づいて想定される前記暖機完了後のエンジン回転速度よりも高くなるように、エンジン出力を制御する
ことを特徴とする請求項1に記載の車両用駆動装置の制御装置。
【請求項3】
前記エンジン出力割合を定めた出力割合マップが予め設定されており、
前記エンジンの温度に基づいて該出力割合マップから決定した前記エンジン出力と前記走行用電動機の出力とを、フィードフォワード制御により前記エンジンと前記走行用電動機とにそれぞれ出力させる
ことを特徴とする請求項2に記載の車両用駆動装置の制御装置。
【請求項4】
前記エンジンの暖機過程では、前記エンジン出力割合を前記エンジンの温度が低いほど小さくする
ことを特徴とする請求項1から3の何れか1項に記載の車両用駆動装置の制御装置。
【請求項5】
予め設定されたエンジン動作曲線に従って前記エンジンを制御し、
前記エンジンの暖機過程では、前記エンジン動作曲線を前記エンジンの暖機完了後よりも低エンジントルク側に設定する
ことを特徴とする請求項1から4の何れか1項に記載の車両用駆動装置の制御装置。
【請求項1】
エンジンおよび走行用電動機の動力を駆動輪に伝達する車両用駆動装置の制御装置であって、
前記エンジンが暖機完了に至る前の暖機過程では、エンジン出力と前記走行用電動機の出力との和に対するエンジン出力割合を前記エンジンの暖機完了後よりも小さくする
ことを特徴とする車両用駆動装置の制御装置。
【請求項2】
前記車両用駆動装置は、前記エンジンの動力を前記駆動輪へ出力し差動用電動機により差動状態が制御される電気式差動機構を備えており、
前記エンジンの暖機過程では、エンジン回転速度が、車両の要求出力に基づいて想定される前記暖機完了後のエンジン回転速度よりも高くなるように、エンジン出力を制御する
ことを特徴とする請求項1に記載の車両用駆動装置の制御装置。
【請求項3】
前記エンジン出力割合を定めた出力割合マップが予め設定されており、
前記エンジンの温度に基づいて該出力割合マップから決定した前記エンジン出力と前記走行用電動機の出力とを、フィードフォワード制御により前記エンジンと前記走行用電動機とにそれぞれ出力させる
ことを特徴とする請求項2に記載の車両用駆動装置の制御装置。
【請求項4】
前記エンジンの暖機過程では、前記エンジン出力割合を前記エンジンの温度が低いほど小さくする
ことを特徴とする請求項1から3の何れか1項に記載の車両用駆動装置の制御装置。
【請求項5】
予め設定されたエンジン動作曲線に従って前記エンジンを制御し、
前記エンジンの暖機過程では、前記エンジン動作曲線を前記エンジンの暖機完了後よりも低エンジントルク側に設定する
ことを特徴とする請求項1から4の何れか1項に記載の車両用駆動装置の制御装置。
【図1】


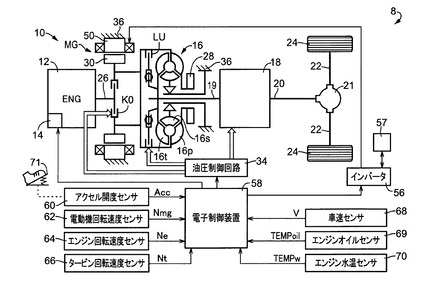
【図2】
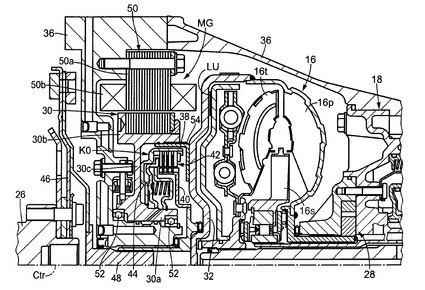
【図3】
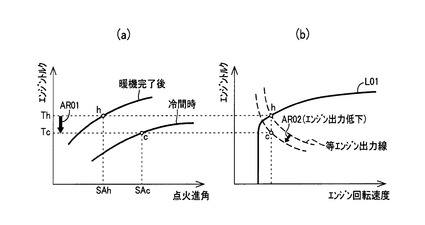
【図4】
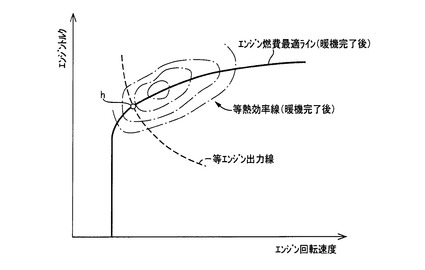
【図5】
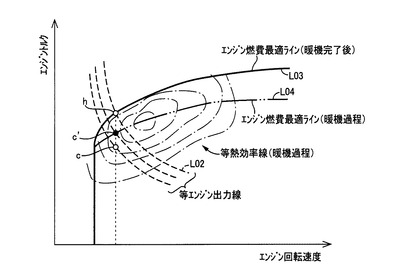
【図6】
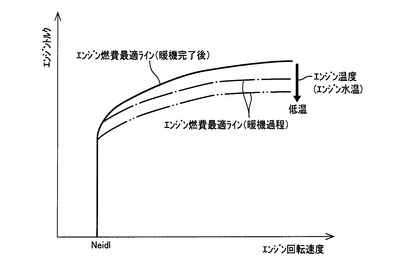
【図7】
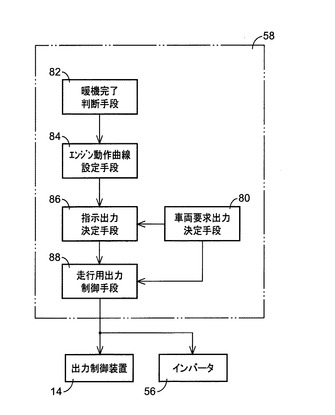
【図8】
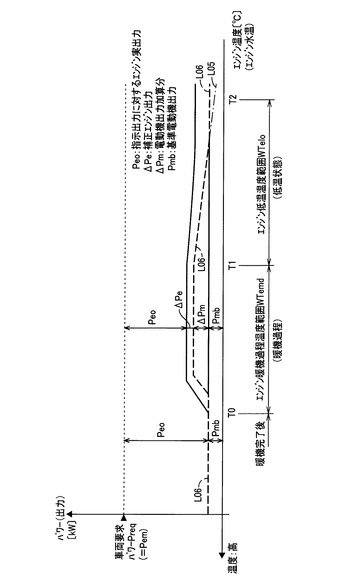
【図9】
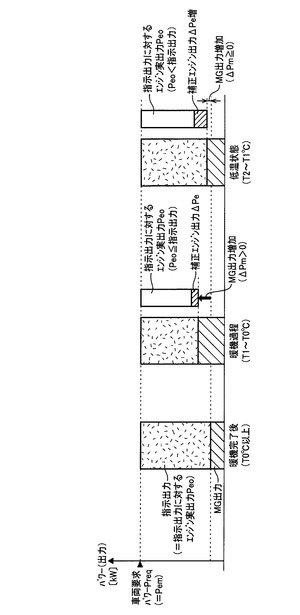
【図10】
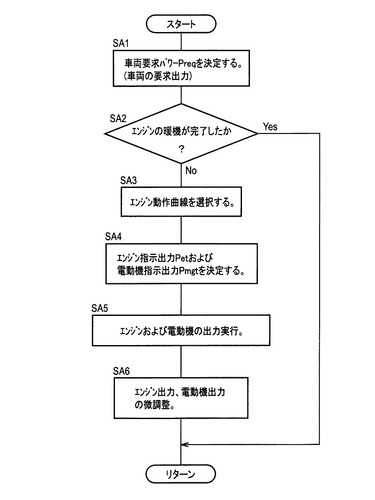
【図11】
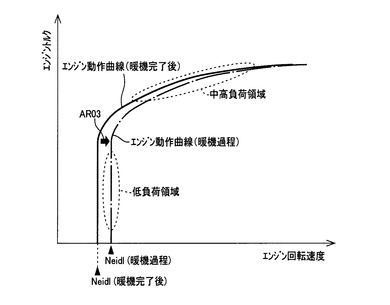
【図12】
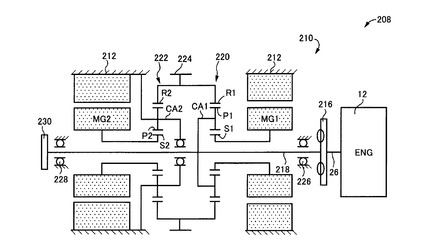
【図13】
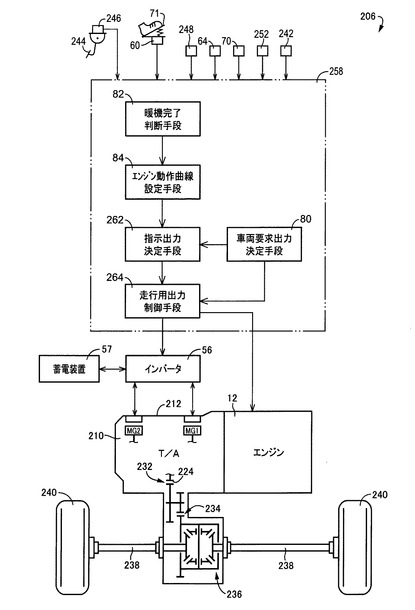
【図14】
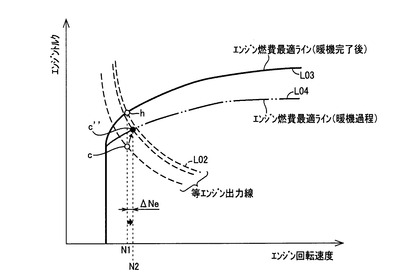
【図15】
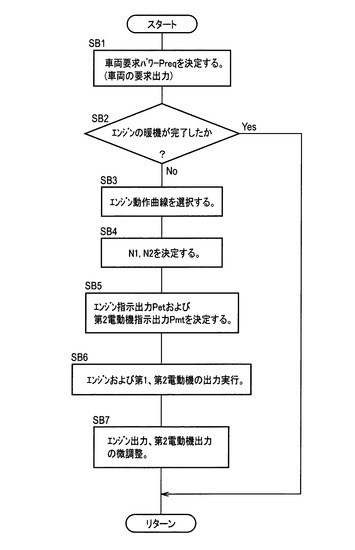
【図16】
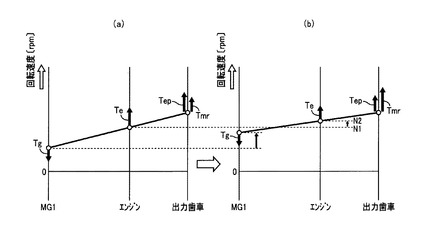
【図17】
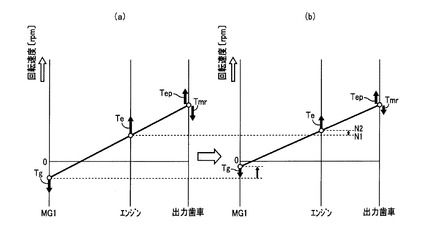
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2013−1201(P2013−1201A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−132720(P2011−132720)
【出願日】平成23年6月14日(2011.6.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月14日(2011.6.14)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]