
車両移動状況検出装置および車両移動状況検出方法
【課題】 自車両の進行に関する方位と対地車速を正確に検出し物体への接近を確実に回避する。
【解決手段】複数の側方監視用レーダ装置21,22を用いて、静止物体を識別する。静止物体RM1,RM2の方位および相対速度の検出値に基づいて空間的に密集して存在する物体を静止物体RM1,RM2と判定し、該判定された静止物体を成す物体(反射点)のうち自車両から最至近に位置する物体T11,T21に関する方位および相対速度の情報に基づいて物体との接近の蓋然性を判断し、車両制御装置50にこの蓋然性低減のための信号を供給する。
【解決手段】複数の側方監視用レーダ装置21,22を用いて、静止物体を識別する。静止物体RM1,RM2の方位および相対速度の検出値に基づいて空間的に密集して存在する物体を静止物体RM1,RM2と判定し、該判定された静止物体を成す物体(反射点)のうち自車両から最至近に位置する物体T11,T21に関する方位および相対速度の情報に基づいて物体との接近の蓋然性を判断し、車両制御装置50にこの蓋然性低減のための信号を供給する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、レーダを用いて車両の移動状況を検出する車両移動状況検出装置および車両移動状況検出方法に関する。
【背景技術】
【0002】
自車両の移動ベクトルを得るための手法として、電波式対地速度計を用いて自車両の移動ベクトルを算出する技術が既に提案されている(例えば、特許文献1参照)。
【特許文献1】特開平10−20027号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
電波式対地速度計を用いて自車両の移動ベクトルを算出する手法では、専用の電波式対地速度計(対地速度検出器)を装備することが必要である(特許文献1に開示の例では対地速度検出器を2基装備)。このため、これに起因するコスト増が避けられない。
本発明は上述のような状況に対応するべくなされたものであり、自車両(自車両)の対地速度検出のための専用の装置を用いずに自車両の移動状況(例えば移動ベクトルとして表され得る)を適確に検出することを可能にする車両移動状況検出装置および車両移動状況検出方法を提供することをその課題とする。
【課題を解決するための手段】
【0004】
上記課題を解決するために、本発明では、車両の少なくとも両側方における各所定位置から側方への所定の広がりを持つ各探索覆域に存在する電磁波反射物体における電磁波反射部位毎に当該電磁波反射部位の距離、相対速度、および、方位を含む物標情報をそれぞれ得るレーダ部を設ける。このレーダ部で得た各物標情報に基づいて静止物体を識別する。該識別した静止物体の相対速度および方位に基づいて自車両の移動状況を算定する。
【発明の効果】
【0005】
本発明によれば、対地速度検出のための専用の装置を用いずに自車両の移動状況を適確に検出することが可能になる。
【発明を実施するための最良の形態】
【0006】
車両等においては、一般に、側方検知用レーダ装置として電波式のレーダ装置を適用する。
この種の電波式のレーダ装置では、FM−CW(周波数変調連続波:Frequency-Modulated Continuous Wave)方式が多く採用される。このFM−CW方式では、矩形波或いは三角波によって周波数変調した連続波を放射し、物標から戻って来る反射波における周波数の遷移に基づいて当該物標の距離および相対速度を算出する。
【0007】
尚、側方検知用レーダ装置における方位検出方式としては、探索覆域を異ならせた複数の送受信アンテナを用いるマルチビーム方式がある。
本実施の形態では、物標の探索に関して上述のFM−CW方式を採り、方位検出に関して位相差モノパルス方式を採る電波式レーダ装置を適用可能であり、本明細書では、このような場合の例について詳述する。
【0008】
以下、図面を参照して本発明の実施の形態について詳述することにより本発明を明らかにする。
尚、以下に参照する各図において、便宜上、説明の主題となる要部は適宜誇張し、要部以外については適宜簡略化し乃至省略している。
【0009】
(本発明の実施の形態の概要)
図1は、本発明の実施の形態の概要を表す概念図である。
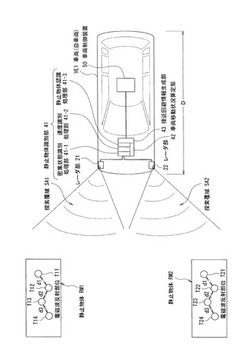
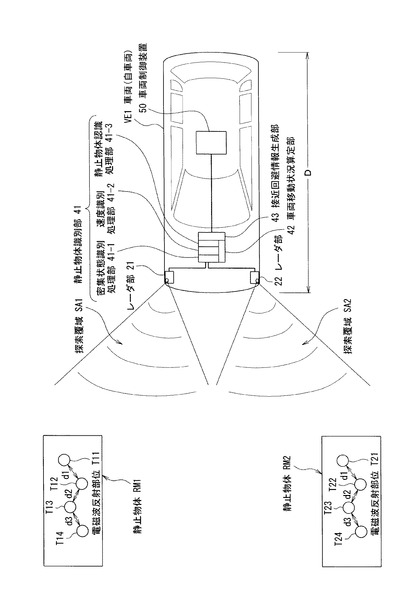
図1の実施の形態では、自車両VE1の、右および左の両側方における各前部に、それぞれ右側のレーダ部21および左側のレーダ部22を備える。
これらの各レーダ部21およびレーダ部22は、それらの各設置位置から側方への所定の広がり(即ち、自車両VE1の幅方向への広がり)を持つ領域を各対応する探索覆域SA1および探索覆域SA2としている。
【0010】
レーダ部21およびレーダ部22は、各対応する探索覆域SA1および探索覆域SA2に存在する電磁波反射物体における電磁波反射部位毎に、当該電磁波反射部位の距離、相対速度、および、方位を含む物標情報をそれぞれ得る。
尚、本明細書において「電磁波反射部位」は、レーダ部が物標として検出する各検出部位を表している。この部位においてのみ電磁波の反射が生じることを表しているのではない。
【0011】
図1中、この電磁波反射部位は、静止物体RM1のT11,T12,T13,T14、および、静止物体RM2のT21,T22,T23,T24である。
上述のレーダ部21およびレーダ部22で得た物標情報に基づく処理を実行するために、静止物体識別部41、車両移動状況算定部42、および、接近回避情報生成部43を設ける。
【0012】
静止物体識別部41は、上述のレーダ部21およびレーダ部22で得た各物標情報に基づいて静止物体(図1では静止物体RM1および静止物体RM2)を識別する。
静止物体識別部41は、この識別を行うために、密集状態識別処理部41−1、速度識別処理部41−2、および、静止物体認識処理部41−3を備えている。
密集状態識別処理部41−1は、空間位置が相互に所定間隔以内に接近した密集状態にある複数の電磁波反射部位を識別する。本実施の形態では、空間位置が相互に自車両VE1の全長Dに相当する間隔以内(d1,d2,d3)に接近した複数の電磁波反射部位(T11,T12,T13,T14;T21,T22,T23,T24)を密集状態にあるものと識別する。
【0013】
尚、図1においては、説明の便宜上、例示した静止物体RM1および静止物体RM2における各電磁波反射部位は相似的な分布を示すものと仮定している。
また、線図が錯綜することを避け、上述の各間隔を敢えてd1,d2,d3の限りに簡略化して表記している。実際に自車両VE1の全長Dと上述の各間隔との対比を実行するに際しては、全ての電磁波反射部位相互の組み合わせについて、これら相互の間隔を評価する。
【0014】
次に、速度識別処理部41−2は、該密集状態にあることを識別した複数の電磁波反射部位毎に、それらの相対速度を方位に応じて補正し、該補正した各相対速度が自車両VE1の走行速度と同等であるか否かを識別する。
更に、静止物体認識処理部41−3は、上記の密集状態にあると識別し且つ上記補正後の各相対速度が自車両VE1の走行速度と同等であると識別した複数の電磁波反射部位の集合について、該集合が一の静止物体(RM1、RM2)に対応するものと認識する。
【0015】
車両移動状況算定部42は、該一の静止物体に対応するこれら電磁波反射部位のうち自車両VE1の最至近位置にあるものの相対速度を一つの算定根拠として自車両VE1の移動状況を算定する。この算定は静止物体RM1(RM2)に関する自車両VE1の相対速度および方位に基づいて、移動速度および移動方向による移動ベクトルを算出する形態で実行し得る。
尚、図中、最至近位置にある電磁波反射部位は、静止物体RM1におけるT11および静止物体RM2におけるT21であるが、これらを含む所定範囲内の車両近傍領域に位置する電磁波反射部位であれば、その相対速度を上述の算定根拠として適用可能である。
【0016】
接近回避情報生成部43では、上述のようにして算定した自車両VE1の移動状況を判定基準として、周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を自車両VE1の走行を制御する車両制御装置50に供給する。
【0017】
(第1の実施の形態)
以上、図1を参照して概要を説明した本発明の一つの実施の形態に関し、より具体的な第1の実施の形態における構成および作用について、各該当する図面を参照して詳述する。
【0018】
(第1の実施の形態の構成)
図2は、本発明の第1の実施の形態における構成を表す機能ブロック図である。
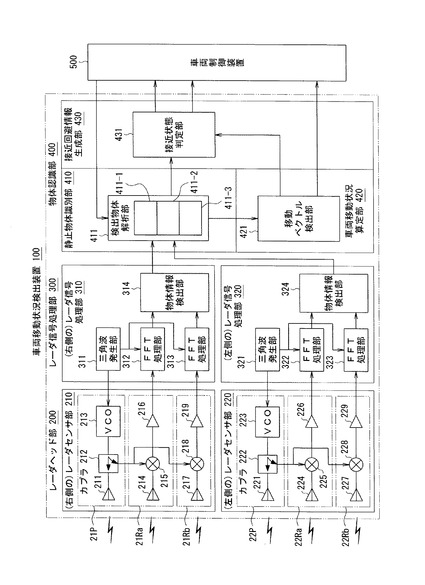
図2において、本発明の第1の実施の形態としての車両移動状況検出装置100は、レーダヘッド部200、レーダ信号処理部300、および、物体認識部400を含む。
レーダヘッド部200は、(右側の)レーダセンサ部210および(左側の)レーダセンサ部220を含む。また、レーダ信号処理部300は、(右側の)レーダ信号処理部310および(左側の)レーダ信号処理部320を含む。
レーダセンサ部210およびレーダセンサ部220は、図1の右側のレーダ部21のレーダセンサ部分および左側のレーダ部22のレーダセンサ部分に各対応する。
【0019】
(右側の)レーダセンサ部210は、送信部21P、(右側の)第1受信部21Ra、および、第2受信部21Rbを含む。
送信部21Pは、送信用のアンテナ211、電力分配器(カプラ)212、および、VCO(Voltage Controlled Oscillator:電圧制御発振器)213を含む。電力分配器(カプラ)212はアンテナ211に送信用信号の電力を供給する。VCOは制御電圧に応じて周波数が変化する出力信号を発し、電力分配器212に供給する。
【0020】
また、第1受信部21Raは、受信用のアンテナ214、乗算器(ミキサ)215、および、増幅器216を含む。乗算器(ミキサ)215はアンテナ214の出力と電力分配器212から供給される信号(ローカル信号)とを乗算して中間周波数に変換した信号を得る。
一方、第2受信部21Rbは、受信用のアンテナ217、乗算器(ミキサ)218、および、増幅器219を含む。乗算器(ミキサ)219はアンテナ217の出力と電力分配器212から供給される信号(ローカル信号)とを乗算して中間周波数に変換した信号を得る。
【0021】
(右側の)レーダ信号処理部310は、三角波発生部311、FFT処理部312、FFT処理部313、および、物体情報検出部314を含む。
三角波発生部311は上述のVCO213、FFT処理部312、および、FFT処理部313にその出力信号(三角波)を供給する。
FFT処理部312は、三角波発生部311が供給した信号を用いて、第1受信部21Raに関する系統で上述のようにして得た中間周波数に変換された信号について周波数解析を行い、該解析結果を表す出力信号を物体情報検出部314に供給する。
【0022】
同様に、FFT処理部313は、上述の第2受信部21Rb関する系統で上述のようにして得た中間周波数に変換された信号について周波数解析を行い、該解析結果を表す出力信号を物体情報検出部314に供給する。
物体情報検出部314は、FFT処理部312およびFFT処理部313が各供給した解析結果を表す信号に基づいて、FM−CW方式により、該当する物標(電磁波反射部位T11,T12,T13,T14)の距離、相対速度、および、方位を含む物標情報を得る。
【0023】
即ち、レーダセンサ部210およびレーダ信号処理部310は、図1を参照して既述の右側のレーダ部21に対応する。
以上は、図2における右側のレーダ部の構成であるが、左側のレーダ部の系統も同様の構成を有する。
即ち、(左側の)レーダセンサ部220は、送信部22P、(左側の)第1受信部22Ra、および、第2受信部22Rbを含む。
【0024】
送信部22Pは、送信用のアンテナ221、電力分配器(カプラ)222、および、VCO223を含む。電力分配器(カプラ)222はアンテナ221に送信用信号の電力を供給する。VCO223は制御電圧に応じて周波数が変化する出力信号を発し、電力分配器222に供給する。
また、第1受信部22Raは、受信用のアンテナ224、乗算器(ミキサ)225、および、増幅器226を含む。乗算器(ミキサ)225はアンテナ224の出力と電力分配器222から供給される信号(ローカル信号)とを乗算して中間周波数に変換した信号を得る。
【0025】
一方、第2受信部22Rbは、受信用のアンテナ227、乗算器(ミキサ)228、および、増幅器229を含む。乗算器(ミキサ)229はアンテナ227の出力と電力分配器222から供給される信号(ローカル信号)とを乗算して中間周波数に変換した信号を得る。
(左側の)レーダ信号処理部320は、三角波発生部321、FFT処理部322、FFT処理部323、および、物体情報検出部324を含む。
【0026】
三角波発生部321は上述のVCO223、FFT処理部322、および、FFT処理部323にその出力信号(三角波)を供給する。
FFT処理部322は、三角波発生部321が供給した信号を用いて、第2受信部22Raに関する系統で上述のようにして得た中間周波数に変換された信号について周波数解析を行い、該解析結果を表す出力信号を物体情報検出部324に供給する。
【0027】
同様に、FFT処理部323は、上述の第2受信部22Rb関する系統で上述のようにして得た中間周波数に変換された信号について周波数解析を行い、該解析結果を表す出力信号を物体情報検出部324に供給する。
物体情報検出部314は、FFT処理部312およびFFT処理部313が各供給した解析結果を表す信号に基づいて、FM−CW方式により、該当する物標(電磁波反射部位T11,T12,T13,T14)の距離、相対速度、および、方位を含む物標情報を得る。
【0028】
即ち、レーダセンサ部210およびレーダ信号処理部310は、図1を参照して既述の右側のレーダ部21に対応する。
上述のようにして生成された(右側の)レーダ信号処理部310(その物体情報検出部314)の出力である物標情報を物体情報認識部400に供給する。また、(左側の)レーダ信号処理部320(その物体情報検出部324)の出力である物標情報を物体情報認識部400に供給する。
【0029】
上述のようなレーダ信号処理部300の後段に設けた物体情報認識部400は、静止物体識別410、車両移動状況算定部420、および、接近回避状況生成部430を含む。
静止物体識別部410は、上述の物体情報検出部314および物体情報検出部324が各供給した物標情報を解析し、静止物体を識別する検出物体識別部411を含む。
この検出物体識別部411は、静止物体識別処を実行するための、密集状態識別処理部411−1、速度識別処理部411−2、および、静止物体認識処理部411−3を含む。
【0030】
密集状態識別処理部411−1は、各電磁波反射部位の分布を二次元のマップに表した空間マップを作成し、このマップを利用して、空間位置が相互に所定間隔(例えば自車両VE1の全長相当の間隔)以内に接近した密集状態にある複数の電磁波反射部位を識別する。
【0031】
次いで、速度識別処理部411−2は、既述の密集状態にあることを識別した複数の電磁波反射部位毎にその方位に応じて補正した各相対速度が自車両VE1の走行速度と同等であるか否かを識別する。この識別に際して自車両VE1の走行速度が既知であることが必要であるが、この走行速度自体は、車両制御装置500側から供給する。
【0032】
更に、静止物体認識処理部411−3では、該密集状態にあり且つ相対速度が自車両VE1の走行速度と同等であると識別した複数の電磁波反射部位の集合について、それらが一の静止物体(静止物体RM1)に対応するものであると認識する。
一方、車両移動状況算定部420は、移動ベクトル検出部421を含む。この移動ベクトル検出部421は、静止物体識別部410(その検出物体解析部411)による解析結果に基づいて、静止物体であると識別した物体に対する相対速度および方位に基づいて自車両VE1の移動状況を算定する。この算定では、自車両VE1の移動速度および移動方向を表す移動ベクトルを得る。
【0033】
両移動状況算定部420の後段の接近回避情報生成部430は、接近状態判定部431を含む。この接近状態判定部431では、検出物体解析部411および移動ベクトル検出部421の各出力に基づいて周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を生成して車両制御装置500に供給する。
車両制御装置500では、この接近回避情報を受けて、接近回避のための適確な制御を実行する。
【0034】
(第1の実施の形態の作用)
次に、図2の構成を有する本発明の第1の実施の形態としての車両移動状況検出装置100の作用について、図3ないし図6を参照して説明する。
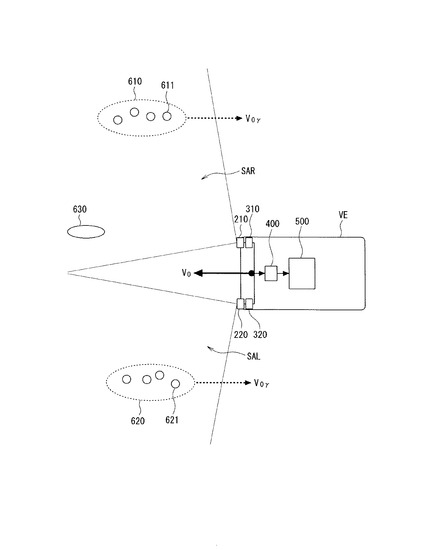
図3は、図2の車両移動状況検出装置100を自車両VEに搭載した状態での作用を表す概念図である。
図3において、後段にレーダ信号処理部310を接続したレーダセンサ部210は、このレーダセンサ部210が位置する自車両VEの右前側方から前方および右側方への所定の広がりを持つ探索覆域SARをカバーする。即ち、レーダセンサ部210およびレーダ信号処理部310によって探索覆域SAR内の物体610(物標である複数の電磁波反射部位611)、および物体630に関する物標情報を得る。
【0035】
また、後段にレーダ信号処理部320を接続したレーダセンサ部220は、このレーダセンサ部220が位置する自車両VEの左前側方から前方および左側方への所定の広がりを持つ探索覆域SALをカバーする。即ち、レーダセンサ部220およびレーダ信号処理部320によって探索覆域SAL内の物体620(物標である複数の電磁波反射部位621)に関する物標情報を得る。
【0036】
レーダ信号処理部310およびレーダ信号処理部320が各供給する物標情報を受けた物体認識部400が、静止物体を識別し、自車両VEの移動状況を算定し、接近回避情報を生成する。
自車両VEの移動状況は、図示の例では、直進方向に一定の大きさの速度を持つ移動ベクトルV0(実線図示)を成し、物体610および物体620の移動状況は、これらが静止物体である場合には、上記との対照において、移動ベクトルV0とは同量逆向きの各移動ベクトルV0r(破線図示)を成す。
【0037】
(FM−CW方式による距離および相対速度の検出)
次に、図4を参照して、本発明の各実施の形態で適用しているFM−CW方式による距離および相対速度の検出について、図2の第1の実施の形態でこれらの検出を実行する場合を例に説明する。
【0038】
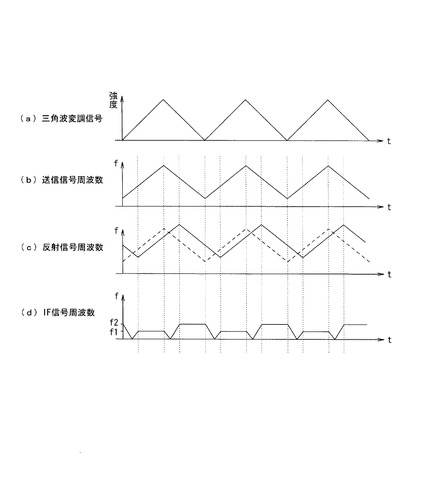
図2の車両移動検出装置100のレーダ識別処理部300における三角波発生部311(321)で生成した図4(a)の三角波変調信号をVCO213(223)に供給し、VCO213(223)から図4(b)のように周波数が変化する送信信号を得る。
上記送信信号を送信用のアンテナ211(221)から放射し、電磁波反射部位(物標)で反射して戻った電磁波を受信用アンテナ214(217,224,227)で受信した受信信号は、図4(c)に実線図示したような周波数の変化を呈する。
【0039】
図4(c)では図4(b)の送信信号の周波数の変化を、対比のために破線図示している。
図4(c)より明らかなとおり、実線図示の反射波(電磁波反射部位からの反射信号)は、破線図示の送信信号に対し電磁波の往復に対応する時間の遅延を生じている。即ち、同一の時点では、実線図示の送信信号と実線図示の反射波とは、上記遅延時間に相応する周波数差を生じている。
【0040】
上述の周波数差を有する受信信号を、図2のレーダヘッド部210(220)におけるミキサ215(219,226,229)で 図4(b)の送信信号との混合によって中間周波数(IF)に変換し、図4(d)のようなIF信号を得る。
従って、図4(d)のIF信号の周波数(上記送受信の両信号間の周波数差)が、レーダヘッドから電磁波を発してから物標で反射し戻るまでの時間、即ち、距離に対応する。
【0041】
図4(d)のとおり、上述のIF信号の周波数は、f1およびf2の2種類出現する。これは、自車両VEが移動しているため、図4(a)の三角波変調信号によって周期的に周波数を増減させている送信信号およびこれの受信信号のそれぞれに対して、周波数のドップラーシフトが生じることに起因する。
三角波変調信号における周波数上昇区間と周波数下降区間におけるIF信号のペアリングを行い、両周波数f1およびf2の平均をとることにより、ドップラーシフトの影響を相殺して誤差を十分に低減した距離情報を得る。
また一方、ドップラーシフトの現象を利用して、ペアリングを行った両周波数f1およびf2の差分に基づいて、相対速度の情報を得る。
【0042】
(FM−CW方式による方位の検出)
次に、図5を参照して、本発明の実施の形態に適用するレーダ装置によって方位情報を得る方法について説明する。
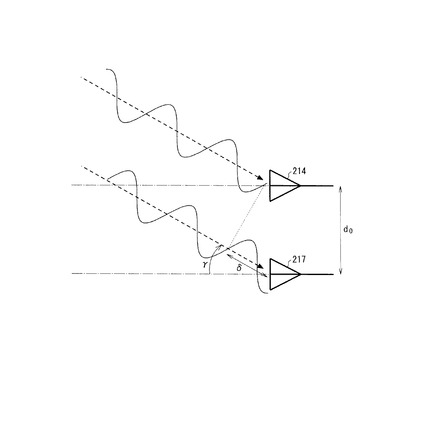
図5は、受信系を2系統として各系統で受信する反射信号の位相差に基づいて方位を割り出す位相モノパルス方式における方位情報取得の様子を表す図である。
以下には、説明の便宜上、図2のレーダヘッド部200の(右側の)レーダセンサ部210における検出出力に基づいて方位情報を得る場合について説明する。
【0043】
図2におけるレーダセンサ部210の各受信用のアンテナ214および217のアンテナゲインを各2分の1にすると共に、これら両アンテナ214および217の間隔を方位の検出に適合するように設定する。この値は、予定した仕様に応じて適宜の値とする。
位相モノパルス方式では、電磁波の波長をλ、両アンテナ214および217の間隔をd0、両アンテナ214および217に係る受信の位相差φから次の数式(1)によって方位γが割り出される。
【0044】
【数1】

【0045】
ここに一つの具体例を想定して、この場合に検出方位の範囲に対応する反射信号の位相差について例示する。即ち、電磁波として24GHzのマイクロ波を用い、横方向(水平面内の方向)に90度の広がりを有する探索覆域内で物標の方位を検出することを前提に、両アンテナの間隔d0を4.4mmに配置する場合を想定する。
【0046】
この想定のもとでは、上述のような探索覆域内で物標の方位が+45度から−45度の範囲で変化したときには、両アンテナで受信される反射信号の位相差が+90度から−90度の範囲の値を示すことになる。
以上は、図2における(右側の)レーダセンサ部210の各受信用のアンテナ214および217を用いて方位を検出する場合の例であるが、この検出方法は、(左側の)レーダセンサ部220の各受信用のアンテナ224および227を用いて方位を検出する場合についても同様である。
上述の数式(1)に基づく演算は、図2の車両移動状況検出装置100のレーダ信号処理部300における物体情報検出部314および324において実行し、方位情報を得る。
【0047】
(自車両の移動ベクトルの算定処理)
次に、図6を参照しつつ、図2の車両移動状況検出装置100における自車両の移動ベクトルの算定処理について説明する。
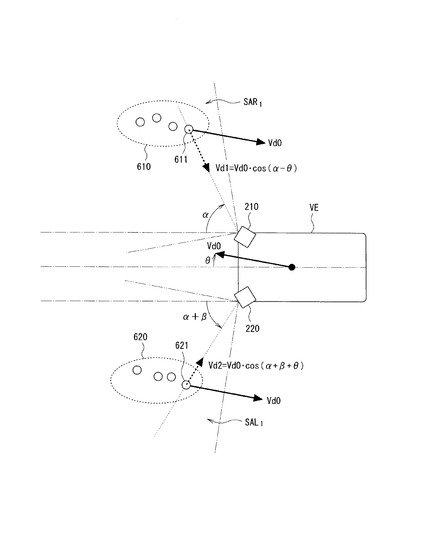
図6は、図2の車両移動状況検出装置100において静止物体を識別する作用について説明するための図である。
図2を参照して既述のように、物体情報検出部314(324)は、物標情報(当該物標の、距離、相対速度、および、方位を表す各情報)を静止物体識別部410に供給する。
【0048】
静止物体識別部410は、この方位を表す方位情報を用いて、次の数式(2)の如く各物標(各電磁波反射部位)に関し、当初に得た相対速度の値Vd0を補正し、補正値Vdを得る。
【0049】
【数2】
【0050】
数式(2)に基づいて補正した各電磁波反射部位毎の相対速度Vdが車両(自車両)VEの車速V0と同等である場合に、これら複数の電磁波反射部位の集合が、路側の静止物体に対応するものであると判定する。
尚、この判定に際して適用する車両(自車両)VEの車速V0としては、一般的に、車両制御装置500が車両の走行時においては検出(認識)している例えば速度計による車速情報を適用する。
【0051】
このような車速情報は、従来の技術について説明したように、高速走行や悪天候におけるようにタイヤがスリップし易い条件下では、操舵角と車両の進行方向との関係が非線形を呈することがあり、必ずしも検出精度が高いものではない。
しかしながら、該判定に適用する自車両の移動状況に係る情報は、静止物体であることを識別する限りにおいて所要の精度を充足していればよく、この意味での要求精度を充足するには既述の従来技術でも不足はない。
【0052】
本発明の実施の形態では、このようにして路側の静止物体に対応するものであることを判定した各電磁波反射部位のうち、車両(自車両)VEから最至近にある物標(図6では、電磁波反射部位611,621)に着目し、これらの物標に関する物標情報を利用する。
即ち、車両(自車両)VEから最至近にある物標に関する物標情報(当該物標の、距離、上述のように補正した相対速度、および、方位を表す各情報)を、図2中、物体認識部400の車両移動状況算定部420における移動ベクトル検出部421に供給する。
【0053】
移動ベクトル検出部421では、該供給された物標情報に基づいて自車両VEの移動ベクトルを算定する。
図6におけるレーダセンサ部210の探索覆域SAR1内の物体610に関する電磁波反射部位611について、その相対速度Vd1を図示の如く算定する。この場合、電磁波反射部位611の方位角(検出値)をα、自車両VEの向きをθとする。
【0054】
また、レーダセンサ部220の探索覆域SAL1内の物体620に関する電磁波反射部位621について、その相対速度Vd2を図示の如く算定する。この場合、電磁波反射部位611の方位角(検出値)をα+β、自車両VEの向きをθとする。
これらの相対速度Vd1およびVd2を適用して、向きがθ、大きさ(移動速度の絶対値)がVrefである自車両VEの移動ベクトルを、次の数式(3)および数式(4)に基づいて算定する。
【0055】
【数3】
【0056】
【数4】
【0057】
図2中、物体認識部400の車両移動状況算定部420における移動ベクトル検出部421で上述のように自車両VEの移動ベクトルを算定し、この移動ベクトルのデータを、物体認識部400の接近回避情報生成部430における接近状態判定部431に供給する。
【0058】
接近状態判定部431では、移動ベクトルのデータ(Vref,θ)と該当する物体(物標)の位置データとに基づいて、この物体に接近する蓋然性(その程度)を判定し、この蓋然性を低減するための接近回避情報を生成して、車両制御装置500に供給する。
車両制御装置500では、この接近回避情報を受けて、接近回避のための適確な制御を実行する。
【0059】
(第1の実施の形態における処理の流れ)
次に、本発明の実施の形態としての車両移動状況検出装置100における処理の流れについて説明する。
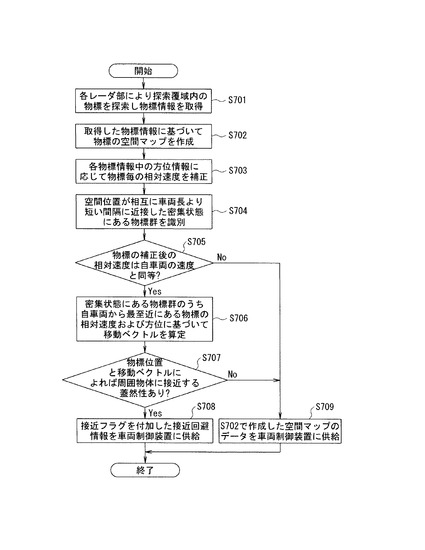
図7は、車両移動状況検出装置100の動作を表すフローチャートである。
先ず、各レーダ部(21,22;レーダヘッド部200+レーダ信号処理部300)によって探索覆域内の物標を探索し、各物標の物標情報(物標たる各電磁波反射部位の、距離および相対速度ならびに方位を表す各情報)を得る(ステップS701)。
ステップS701で取得した各物標情報(距離情報、方位情報)に基づいて、静止物体識別部410(その検出物体解析部411)が、各物標の分布を二次元のマップに表した空間マップを作成する(ステップS702)。
【0060】
また、検出物体解析部411では、ステップS701で取得した各物標情報のうち相対速度情報について、各対応する方位情報に応じて、物標毎の相対速度値を補正する(ステップS703)。
更に、検出物体解析部411では、ステップS702で作成した空間マップを参照して、空間位置が相互に自車両VEの全長(或いは、平均的な車両長)よりも短い間隔となる程度に近接した密集状態にある物標群を識別する(ステップS704)。
【0061】
本実施の形態では、ステップS704で当該密集状態にあると識別した物標群を、既述のとおり、静止物体に対応するものとして扱う。
次いで、検出物体解析部411では、ステップS703で補正した物標の相対速度が自車両の走行速度と同程度であるか否かを判断する(ステップS705)。
ステップS705で、同等であると判断したときには(ステップ705:Yes)、ステップS704で当該密集状態にあると識別した物標群のうち自車両から最至近にある物標の相対速度および方位に基づいて、自車両の移動ベクトルを算定する(ステップS706)。
【0062】
ステップS706で算定した移動ベクトルのデータの供給を受けて、接近回避情報生成部430(その接近状態判定部431)が、物標の位置と移動ベクトルとによれば、自車両VEが周囲物体(物標として捕捉したもの)に接近する蓋然性があるか否かを判断する(ステップS707)。
ステップS707で、自車両VEが物体に接近する蓋然性があると判断したときには(ステップS707:Yes)、接近状態判定部431は、接近フラグを付加した接近回避情報を車両制御装置500に供給して(ステップS708)、処理を終了する。
【0063】
一方、ステップS705で物標の補正後の相対速度が自車両の走行速度と同等ではないと判断したときには、ステップS702で作成した空間マップのデータを車両制御装置500に供給して(ステップS709)、処理を終了する。
また、ステップS707で自車両VEが物体に接近する蓋然性がないと判断したときにも(ステップS707:No)、ステップS702で作成した空間マップのデータを車両制御装置500に供給して(ステップS709)、処理を終了する。
【0064】
(第1の実施の形態の効果)
(1−1)レーダヘッド部200、レーダ信号処理部300、静止物体識別部410、および、車両移動状況算定部420を備えている。
レーダヘッド部200(右側および左側のレーダセンサ部210;220)およびレーダ信号処理部300(右側および左側のレーダ信号処理部310;320)で物標情報を取得する。該取得した物標情報を用いて、静止物体識別部410(その検出物体解析部411)が静止物体を識別する。
該識別した静止物体の情報には、原理上タイヤのスリップ等に起因する誤差が混入することがない。このような確固たる静止物体の情報を基準にして車両移動状況算定部420(その移動ベクトル検出部421)が自車両の移動状況を適確に検出することが可能になる。
【0065】
即ち、対地速度検出のための専用の装置等を用いずに自車両の移動状況を適確に検出することが可能になる。
(1−2)静止物体識別部410は検出物体識別部411を含んでおり、この検出物体識別部411に、静止物体識別処を実行するための、密集状態識別処理部411−1、速度識別処理部411−2、および、静止物体認識処理部411−3を含む。
【0066】
更に、静止物体識別部410で識別した静止物体に関する相対速度および方位に基づいて自車両の移動状況を算定する車両移動状況算定部420を備えている。
車両移動状況算定部420では、上記(1−1)の静止物体識別部410での認識による静止物体の電磁波反射部位のうち自車両VEの最至近位置にある電磁波反射部位(この近傍の部位でもよい)に関する相対速度に基づいており、算定の精度が高い。
(1−3)静止物体識別部410が、上記(1−1)の密集状態識別処理として、空間位置が相互に自車両VEの全長Dに相当する間隔以内に接近した密集状態にある複数の電磁波反射部位を識別することによってこの識別を行うため、簡易で確実な識別が可能である。
(1−4)接近回避情報生成部430では、上記(1−2)の車両移動状況算定部420によって算定した自車両の移動速度に基づいて(該移動速度を一つの判定基準として)、周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を生成するため、周囲物体に接近する蓋然性を確実に低減できる。
(1−5)車両移動状況算定部を、上記(1−1)の静止物体識別部410で識別した静止物体の相対速度および方位に基づいて自車両VEの移動速度および移動方向を表す移動ベクトルを算出するように構成した。
【0067】
更に、接近回避情報生成部430では、車両移動状況算定部420で算出した移動ベクトルに基づいて、周囲物体に接近する蓋然性を判定しこの蓋然性を低減するための接近回避情報を車両制御装置に供給するように構成した。
このため、車両制御装置は、確度の高い情報に依拠して、周囲物体に接近する蓋然性を低減するための制御を実行することが可能になる。
【0068】
(第2の実施の形態)
以上では、各レーダセンサ部の探索覆域を、自車両VEの前部における右および左の側方からそれぞれ右および左側方への所定の広がりを持つように設定した場合につき説明した。
次に、各レーダセンサ部の探索覆域を、自車両VEの後部における右および左の側方からそれぞれ右および左側方への所定の広がりを持つように設定した第2の実施の形態について説明する。
【0069】
(第2の実施の形態の構成および作用)
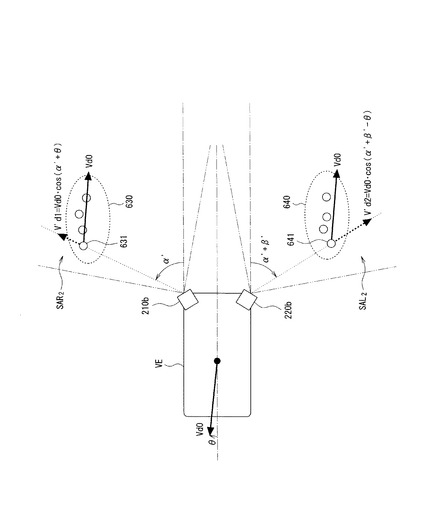
図8は、第2の実施の形態の構成および作用を表す図である。2の実施の形態では、図2の車両移動状況検出装置100と実質的に同様の構成を有する車両移動状況検出装置を、該装置の両レーダセンサ部の探索覆域が自車両VEの後部右および左の側部位からそれぞれ右側方および左側方に各所定の広がりを呈するように設置している。
【0070】
図8のように各レーダセンサ部の探索覆域SAR2およびSAL2を設定する場合も、各探索覆域内の物標検出作用については、図2および図6を参照して既述の場合と本質的に相違しない。
図示の場合、探索覆域SAR2に、物標として検出される電磁波反射部位631の集合を含む物体630が存在し、探索覆域SAL2には、物標として検出される電磁波反射部位641の集合を含む物体640が存在するものと想定している。
【0071】
この場合における物体630および物体640の存在、および、これらの物体に関する上述のような物標情報は、図6における探索覆域SAR1における物体610および探索覆域SAL1における物体620に対する場合と原理上は全く同様に取得することができる。
即ち、図8の場合においても、物体630に属する複数の物標(電磁波反射部位)のうち自自車両VEから最至近にある物標631、および、物体640に属する複数の物標(電磁波反射部位)のうち自車両VEから最至近にある物標641にそれぞれ着目する。
【0072】
図8に示すこれらの物標631および641の相対速度V'd1およびV'd2を、図6を参照して既述の相対速度Vd1およびVd2に替えて適用し、静止物体を識別し、該識別した静止物体を表す情報を基準に自車両VEの移動ベクトルを算定する。
本実施の形態では、以上のようにして、自車両VEの後側方の静止物体を識別し、該識別した静止物体を基準に自車両VEの移動ベクトルを算定することが可能である。
【0073】
(第2の実施の形態の効果)
(2−1)各レーダセンサ部210bおよび220bを、自車両VEの後部における右側方および左側方に設ける。この場合、レーダセンサ部210bおよび220bの探索覆域は自車両VEの後部における右側方および左側方から、それぞれ、右側方および左側方に各所定の広がりを呈するように設定する。
【0074】
これらのレーダセンサ部210bおよび220b自体の各構成は、図6を参照して既述のレーダセンサ部210および220と相違がなく、それらの探索覆域が自車両VEの後方から右側方および左側方に各所定の広がりを呈する点が異なる。
従って、自車両VEの後方の右側方および左側方の物体について、自車両VEの後方から右側方および左側方に各所定の広がりを呈する探索覆域内に捕捉した物体について、第1の実施の形態におけるものと等しい精度を持って、該物体が静止物体であることを認識できる。
【0075】
(第3の実施の形態)
以上、第1の実施の形態では、自車両VEの前部から両側方に向けて探索覆域更形成し、第2の実施の形態では、自車両VEの後部から両側方に向けて探索覆域更形成し、探索覆域内に捕捉した静止物体を基準に自車両VEの移動状況を算定するように構成した。
【0076】
本発明の第3の実施の形態では、レーダの各レーダセンサ部を自車両VEの前および後の各側方に設置し、図6に示した探索覆域SAR1およびSAL1と、図8に示した探索覆域SAR2およびSAL2との、4領域をカバーするように構成する。
即ち、前方レーダ部によって図6に示したような探索覆域SAR1およびSAL1をカバーし、且つ、後方レーダ部によって図8に示したような探索覆域SAR2およびSAL2をカバーする態様を採ることができる。
【0077】
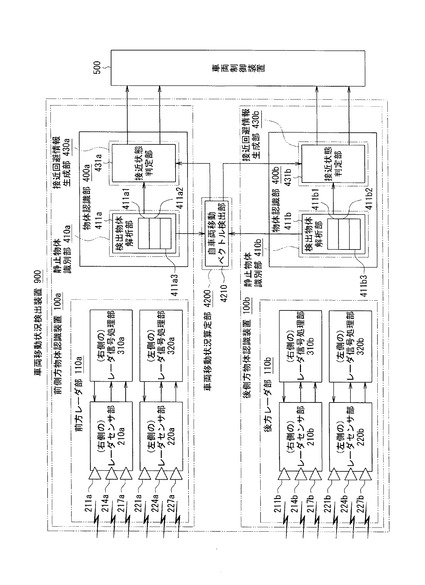
図9は、自車両前方の両側方および自車両後方の両側各方探索覆域をカバーするようにレーダ部を設置した実施の形態における構成を表す機能ブロック図である。
図9の車両移動情報識別装置900において、前側方物体認識装置100aで図6の探索覆域SAR1およびSAL1と同様の探索覆域をカバーし、後側方物体認識装置100bで図8の探索覆域SAR2およびSAL2をカバーする。
【0078】
前側方物体認識装置100aは、前方レーダ部110aと物体認識部400aを含み、この物体認識部400aが、静止物体識別部410aおよび接近回避情報生成部430aを含む。
前方レーダ部110aは、図2のレーダヘッド部200におけるレーダセンサ部210と同様の(右側の)レーダセンサ部210a、および、レーダ信号処理部310と同様の(右側の)レーダ信号処理部310aを備えている。
【0079】
前方レーダ部110aは、更に、図2のレーダヘッド部200におけるレーダセンサ部220と同様の(左側の)レーダセンサ部220a、および、レーダ信号処理部320と同様の(左側の)レーダ信号処理部320aを備えている。
(右側の)レーダセンサ部210aは、アンテナ211a、214a、および、217aを備えている。
(左側の)レーダセンサ部220aは、アンテナ221a、224a、および、227aを備えている。
【0080】
前方レーダ部110aは、図2のレーダヘッド部200およびレーダ信号処理部300と同様に機能して、FM−CW方式により、該当する物標(電磁波反射部位)の距離、相対速度、および、方位を含む物標情報を、(右側および左側とも該当する場合には)それぞれ得る。
【0081】
物体認識部400aは、前方レーダ部110aからの上述の物標情報を得て、図2の物体認識部400と同様に静止物体識別部410a(その検出物体解析部411a)で物標情報を解析し、静止物体を識別する。
検出物体解析部411aは、静止物体識別処を実行するための、密集状態識別処理部411a1、速度識別処理部411a2、および、静止物体認識処理部411a3を含む。この構成を図2と対照すると、検出物体解析部411a1は密集状態識別処理部411−1に、速度識別処理部411a2は速度識別処理部411−2に、各相応する。更に、静止物体認識処理部411a3は静止物体認識処理部411−3に相応する。
【0082】
更に、該識別した静止物体の情報を利用して、車両移動状況検出装置900の車両移動状況算定部4200(その自車両移動ベクトル検出部4210)で、自車両VEの移動ベクトルを算定する。
該算定した移動ベクトルのデータおよび該識別した静止物体の情報を利用して、接近回避情報生成部430a(その接近状態判定部431a)で周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を生成して車両制御装置500に供給する。
【0083】
以上は、図9の車両移動状況検出装置900の前方レーダ部110aの系統に関する構成および作用であるが、この車両移動状況検出装置900の後方レーダ部110bの系統に関する構成および作用も略同様である。
即ち、後側方物体認識装置100bは、後方レーダ部110bと物体認識部400bを含み、この物体認識部400bが、静止物体識別部410bおよび接近回避情報生成部430bを含む。
【0084】
後方レーダ部110bは、(右側の)レーダセンサ部210b、(右側の)レーダ信号処理部310b、(左側の)レーダセンサ部220b、および、(左側の)レーダ信号処理部320bを備えている。
(右側の)レーダセンサ部210bは、アンテナ211b、214b、および、217bを備え、(左側の)レーダセンサ部220bは、アンテナ221b、224b、および、227bを備えている。
【0085】
後方レーダ部110bも、図2のレーダヘッド部200およびレーダ信号処理部300と同様に機能して、FM−CW方式により、該当する物標(電磁波反射部位)の距離、相対速度、および、方位を含む物標情報を、(右側および左側とも該当する場合には)それぞれ得る。
物体認識部400bは、前方レーダ部110bからの上述の物標情報を得て、図2の物体認識部400と同様に静止物体識別部410b(その検出物体解析部411b)で物標情報を解析し、静止物体を識別する。
【0086】
検出物体解析部411bは、静止物体識別処を実行するための、密集状態識別処理部411b1、速度識別処理部411b2、および、静止物体認識処理部411b3を含む。この構成を図2と対照すると、検出物体解析部411b1は密集状態識別処理部411−1に、速度識別処理部411b2は速度識別処理部411−2に、各相応する。更に、静止物体認識処理部411b3は静止物体認識処理部411−3に相応する。
【0087】
更に、該識別した静止物体の情報を利用して、車両移動状況算定部4200(その自車両移動ベクトル検出部4210)で、自車両VEの移動ベクトルを算定する。
該算定した移動ベクトルのデータおよび該識別した静止物体の情報を利用して、接近回避情報生成部430b(その接近状態判定部431b)で周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を生成して車両制御装置500に供給する。
車両制御装置500では、上述の各接近回避情報を受けて、接近回避のための適確な制御を実行する。
【0088】
(第3の実施の形態の作用)
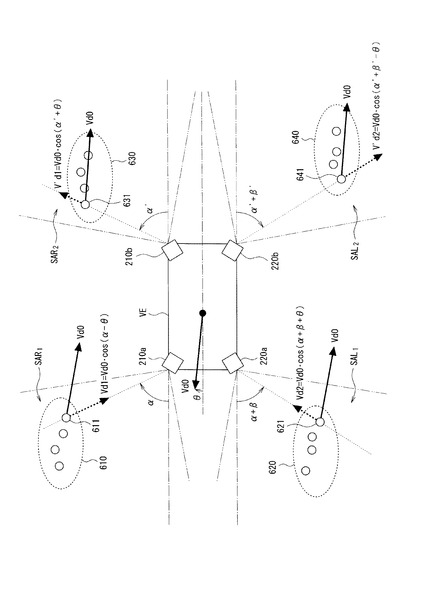
図10は、図9の車両移動状況検出装置900において静止物体を識別する作用について説明するための図である。図10において、既述の図6および図8との対応部には同一の参照符号を附してある。
【0089】
尚、前方のレーダに関し、図6におけるレーダセンサ部210およびレーダセンサ部220には、図10中、車両移動状況検出装置900における前方レーダ部110aの(右側の)レーダセンサ部210aおよび(左側の)レーダセンサ部220bが各対応している。
また、後方のレーダに関し、図8におけるレーダセンサ部210bおよびレーダセンサ部220bには、車両移動状況検出装置900における後方レーダ部110bの(右側の)レーダセンサ部210bおよび(左側の)レーダセンサ部220bが各対応している。
【0090】
車両移動状況検出装置900では、前方レーダ部110a(右側のレーダセンサ部210a;左側のレーダセンサ部220a)の系統で、図6を参照して既述のように、自車両VEから最至近の静止物体上の物標の物標情報に基づいて自車両VEの移動ベクトルを算定する。
同様に、後方レーダ部110b(右側のレーダセンサ部210b;左側のレーダセンサ部220b)の系統で、図8を参照して既述のように、自車両VEから最至近の静止物体上の物標の物標情報に基づいて自車両VEの移動ベクトルを算定する。
車両移動状況検出装置900では、これらの移動ベクトルの算定は、車両移動状況算定部4200(その自車両移動ベクトル検出部4210)で実行する。
【0091】
(第3の実施の形態の効果)
(3−1)自車両VEの前部における右側方および左側方には、レーダセンサ部210aおよび220aを設け、自車両VEの後部における右側方および左側方には、レーダセンサ部210bおよび220bを設けた。
【0092】
この場合、レーダセンサ部210aおよび220aによって図6の各探索覆域SAR1およびSAL1と同様の探索覆域をカバーし、且つ、レーダセンサ部210bおよび220bによって図8の探索覆域SAR2およびSAL2と同様の探索覆域をカバーする。
これらのレーダセンサ部210bおよび220b自体の各構成は、図6を参照して既述のレーダセンサ部210および220と相違がなく、それらの探索覆域が自車両VEの後方から右側方および左側方に各所定の広がりを呈する点が異なる。
【0093】
従って、自車両VEの前側の右側方および左側方、或いは、後側の右側方および左側方の何れか一つの探索覆域を持つ構成に比し、自車両VE周囲を相対的に広い探索覆域でカバーすることができ、周囲物体の検出確率が高くなる。
【0094】
(第4の実施の形態)
一方、本発明は、長距離レーダをも併せ用いた形態で実施することが可能である。
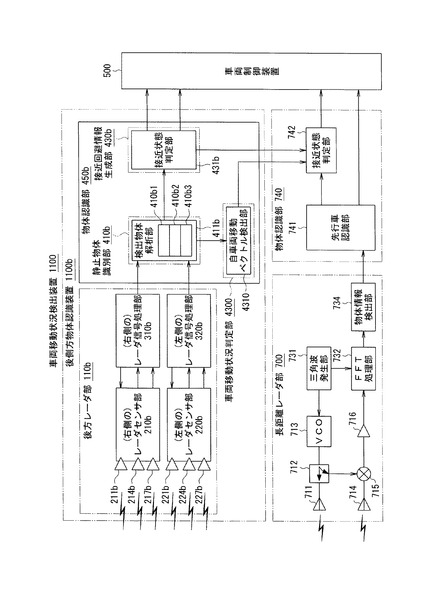
図11は、このような長距離レーダを利用した本発明第4の実施の形態としての車両移動状況検出装置を表す機能ブロック図である。
また、図12は、図11の車両移動状況検出装置の作用を説明するための図である。
図11において、既述の図9との対応部には同一の参照符号を附し、それらについての各個の説明は省略する。
【0095】
また、図12において、既述の図8との対応部には同一の参照符号を附し、それらについての各個の説明は省略する。
更に、図11と図12は、同一の実施の形態に関する図であり、両者間での参照符号の割り当ては整合させてある。
図11の車両移動状況検出装置1100では、図9の装置における後側方物体認識装置100bと略同様の構成の後方物体認識装置1100bを有する。この後方物体認識装置1100bでは、自車両VEの後側方に設定した各探索覆域の物標(物体)を検出し、静止物体の識別を行い、自車両の移動ベクトルを算定する。
【0096】
即ち、図9の装置における後側方物体認識装置100bの後方レーダ部110bと同様にして、FM−CW方式により、該当する物標(電磁波反射部位)の距離、相対速度、および、方位を含む物標情報を取得する。
該取得した物標情報に基づいて、物体認識部450bで、静止物体の識別、自車両の移動ベクトルの算定し、および、周囲物体との接近の蓋然性の判定、ならびに、この蓋然性を低減するための接近回避情報の生成を行う。
【0097】
物体認識部450bにおける、静止物体の識別は、静止物体識別部410bの検出物体解析部411bで行う。検出物体解析部411bは、静止物体識別処を実行するための、密集状態識別処理部411b1、速度識別処理部411b2、および、静止物体認識処理部411b3を含む。
また、本実施の形態では、自車両の移動ベクトルの算定を行う車両移動判定部4300(その自車両移動ベクトル検出部4310)を有する。
【0098】
更に、周囲物体との接近の蓋然性の判定、ならびに、この蓋然性を低減するための接近回避情報の生成を行う接近回避情報生成部430b(その接近状態判定部431b)を有する。
一方、図11の実施の形態では、長距離レーダ部700は、既述の側方物体検出用のレーダと同様のFM−CW方式等を採る。
【0099】
即ち、この長距離レーダ部700は、送信用のアンテナ711、電力分配器(カプラ)712、VCO713、受信用のアンテナ714、乗算器715、増幅器716、三角波発生部731、FFT処理部732、および、物体情報検出部734を含む。
既述の場合と同様に、乗算器715の出力であるIF信号のFFT出力から物体情報検出部734でその距離および相対速度を検出する。この長距離レーダ部700は、既述の前側の右および左側方、ならびに、後側の右および左側方探索覆域を持つ各レーダ部に比し、遠方に広がった(長く前方に向かって広がった)探索覆域SAF(図12)を持ち、該探索覆域に存在する物標毎にその距離および相対速度ならびに方位をそれぞれ検出する。
【0100】
(第4の実施の形態の作用)
図12に示したとおり、上述の後方物体認識装置1100bに係る後方レーダ部110bの探索覆域SAR2、SAL2は、図8を参照して既述のものと変わりがない。想定した物体(物標)の存在や物標情報についても図8の場合と同様であり、図12では表記を簡略化している。
【0101】
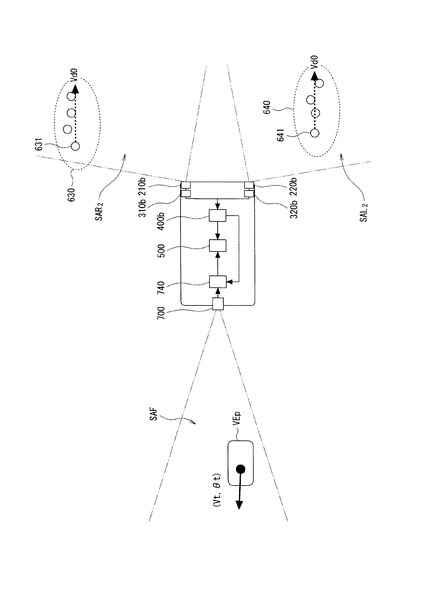
長距離レーダ部700の物体情報検出部734の出力に基づいて、物体認識部740の先行車認識部741で、図12に表記の探索覆域SAF内の先行車両VEpの相対速度Vtおよび方位θtを算定する。
更に、物体認識部740の接近状態判定部742が、これら相対速度Vtおよび方位θtの各データ、ならびに、上述の自車両移動ベクトル検出部4310からの移動ベクトルのデータに基づいて、周囲物体との接近の蓋然性を算定し、接近回避情報を生成する。
【0102】
接近状態判定部742では、この周囲物体との接近の蓋然性の算定、および、接近回避情報を生成に際して、上述の物体認識部450aにおける接近回避情報生成部430b(その接近状態判定部431b)における出力データをも参照する。
物体認識部450b(その接近状態判定部431b)で得た接近回避情報、および、物体認識部740(その接近状態判定部742)で得た接近回避情報を、それぞれ、車両制御装置500に供給する。
【0103】
車両制御装置500では、この接近回避情報を受けて、接近回避のための適確な制御を実行する。
長距離レーダ部700は、所謂狭角レーダ装置であり、例えば、横方向(車載の場合には、車両の前部に前向きに実装したときの幅方向)に20度ないし30度の探索覆域SAFを形成する。
(第4の実施の形態の効果)
(4−1)この実施の形態における長距離レーダ部700の探索覆域SAFは、縦方向(車載の場合には、車両の前部に前向きに実装したときの進行方向)に150メートル程度の領域である。このような領域内で、物標の距離および相対速度ならびに方位をそれぞれ表す物標情報を得る。
【0104】
物標の検出方式としては、例えば、既述の側方物体検出用のレーダと同様のFM−CW方式等を採るが、方位検出に関しては、更に高精度かつ高分解能の方式を採り得る。
(変形例)
レーダ装置による方位検出には、例えば、送受信アンテナの向きを機械的に横方向に走査する方式や、受信にフェイズドアレイアンテナを適用し受信した電磁波の位相差に基づいて方位を検出する方式等がある。
【0105】
このような方式を適用することによって、探索覆域SAF内の先行車両の方位θt(図12)に関して、更に高精度かつ高分解能の検出を行うことが可能である。
尚、図11および図12を参照して説明した実施の形態では、側方検出用のレーダ部を自車両VEの後方に設け、これによる探索覆域を、自車両VEの後方に向けるように設定したが、第4の実施の形態で採用可能な構成はこの限りではない。
【0106】
即ち、側方検出用のレーダ部を自車両VEの前方に設け、これによる探索覆域を、自車両VEの前方に向けるように設定する構成を採ることも可能である。
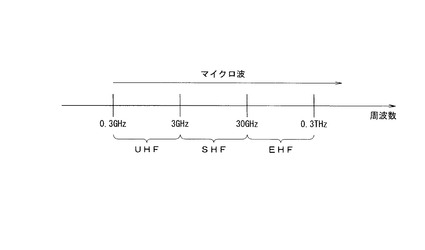
以上述べた本発明の各実施の形態において、レーダ部ではマイクロ波帯以上の周波数帯域の電磁波を用いる。
図13は、本発明の各実施の形態としての車両移動状況検出装置のレーダ部で用いる電磁波の周波数帯域を表す図である。
【0107】
本発明の各実施の形態では、図示のようなマイクロ波帯以上の周波数帯域の電磁波を用いるが、図13におけるマイクロ波帯のうちでも、SHF帯(3GHz〜30GHzの帯域で、この帯域をマイクロ波帯と称する場合がある)ないしそれ以上のEHF帯(30GHz〜0.3THzの帯域)を用いると、直進性の強い特性によって、方位の検出に関して、高精度かつ高分解能の検出を行うことが可能になるという利点がある。
【図面の簡単な説明】
【0108】
【図1】本発明の実施の形態の概要を表す概念図である。
【図2】本発明の第1の実施の形態における構成を表す機能ブロック図である。
【図3】図2の車両移動状況検出装置を車両に搭載した状態での作用を表す概念図である。
【図4】本発明の各実施の形態で適用しているFM−CW方式における電磁波の放射と受信の様子を表す図である。
【図5】発明の実施の形態で適用しているレーダ装置で方位情報を得る方法について説明するための図である。
【図6】図2の車両移動状況検出装置における自車両の移動ベクトルの算定処理について説明するための図である。
【図7】図2の車両移動状況検出装置における全体的な処理の流れを表すフローチャートである。
【図8】本発明の第2の実施の形態を説明するための図である。
【図9】本発明の第3の実施の形態における構成を表す機能ブロック図である。
【図10】図9の車両移動状況検出装置における静止物体識別作用について説明するための図である。
【図11】本発明の第4の実施の形態を表す機能ブロック図である。
【図12】図11の車両移動状況検出装置の作用を説明するための図である。
【図13】本発明の各実施の形態としての車両移動状況検出装置のレーダ部で用いる電磁波の周波数帯域を表す図である。
【符号の説明】
【0109】
21,22 レーダ部
41,410,410a 静止物体識別部
41−1,411−1,411a−1,411b−1 密集状態識別処理部
41−2,411−2,411a−2,411b−2 速度識別処理部
41−3,411−3,411a−3,411b−3 静止物体認識処理部
42,420 車両移動状況算定部
43,430 接近回避情報生成部
50,500 車両制御装置
100,900 車両移動状況検出装置
100a 前側方物体認識装置
100b 後側方物体認識装置
110a 前方レーダ部
110b 後方レーダ部
200 レーダヘッド部
210 (右側の)レーダセンサ部
220 (左側の)レーダセンサ部
300 レーダ信号処理部
310 (右側の)レーダ信号処理部
320 (左側の)レーダ信号処理部
400 物体認識部
410,410a,410b 静止物体識別部
420,420a,420b 車両移動状況算定部
421 移動ベクトル検出部
420,430a、430b 接近回避情報生成部
700 長距離レーダ装置
4200 車両移動状況算定部
4210,4300 自車両移動ベクトル検出部
VE,VE1 自車両
【技術分野】
【0001】
本発明は、レーダを用いて車両の移動状況を検出する車両移動状況検出装置および車両移動状況検出方法に関する。
【背景技術】
【0002】
自車両の移動ベクトルを得るための手法として、電波式対地速度計を用いて自車両の移動ベクトルを算出する技術が既に提案されている(例えば、特許文献1参照)。
【特許文献1】特開平10−20027号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
電波式対地速度計を用いて自車両の移動ベクトルを算出する手法では、専用の電波式対地速度計(対地速度検出器)を装備することが必要である(特許文献1に開示の例では対地速度検出器を2基装備)。このため、これに起因するコスト増が避けられない。
本発明は上述のような状況に対応するべくなされたものであり、自車両(自車両)の対地速度検出のための専用の装置を用いずに自車両の移動状況(例えば移動ベクトルとして表され得る)を適確に検出することを可能にする車両移動状況検出装置および車両移動状況検出方法を提供することをその課題とする。
【課題を解決するための手段】
【0004】
上記課題を解決するために、本発明では、車両の少なくとも両側方における各所定位置から側方への所定の広がりを持つ各探索覆域に存在する電磁波反射物体における電磁波反射部位毎に当該電磁波反射部位の距離、相対速度、および、方位を含む物標情報をそれぞれ得るレーダ部を設ける。このレーダ部で得た各物標情報に基づいて静止物体を識別する。該識別した静止物体の相対速度および方位に基づいて自車両の移動状況を算定する。
【発明の効果】
【0005】
本発明によれば、対地速度検出のための専用の装置を用いずに自車両の移動状況を適確に検出することが可能になる。
【発明を実施するための最良の形態】
【0006】
車両等においては、一般に、側方検知用レーダ装置として電波式のレーダ装置を適用する。
この種の電波式のレーダ装置では、FM−CW(周波数変調連続波:Frequency-Modulated Continuous Wave)方式が多く採用される。このFM−CW方式では、矩形波或いは三角波によって周波数変調した連続波を放射し、物標から戻って来る反射波における周波数の遷移に基づいて当該物標の距離および相対速度を算出する。
【0007】
尚、側方検知用レーダ装置における方位検出方式としては、探索覆域を異ならせた複数の送受信アンテナを用いるマルチビーム方式がある。
本実施の形態では、物標の探索に関して上述のFM−CW方式を採り、方位検出に関して位相差モノパルス方式を採る電波式レーダ装置を適用可能であり、本明細書では、このような場合の例について詳述する。
【0008】
以下、図面を参照して本発明の実施の形態について詳述することにより本発明を明らかにする。
尚、以下に参照する各図において、便宜上、説明の主題となる要部は適宜誇張し、要部以外については適宜簡略化し乃至省略している。
【0009】
(本発明の実施の形態の概要)
図1は、本発明の実施の形態の概要を表す概念図である。
図1の実施の形態では、自車両VE1の、右および左の両側方における各前部に、それぞれ右側のレーダ部21および左側のレーダ部22を備える。
これらの各レーダ部21およびレーダ部22は、それらの各設置位置から側方への所定の広がり(即ち、自車両VE1の幅方向への広がり)を持つ領域を各対応する探索覆域SA1および探索覆域SA2としている。
【0010】
レーダ部21およびレーダ部22は、各対応する探索覆域SA1および探索覆域SA2に存在する電磁波反射物体における電磁波反射部位毎に、当該電磁波反射部位の距離、相対速度、および、方位を含む物標情報をそれぞれ得る。
尚、本明細書において「電磁波反射部位」は、レーダ部が物標として検出する各検出部位を表している。この部位においてのみ電磁波の反射が生じることを表しているのではない。
【0011】
図1中、この電磁波反射部位は、静止物体RM1のT11,T12,T13,T14、および、静止物体RM2のT21,T22,T23,T24である。
上述のレーダ部21およびレーダ部22で得た物標情報に基づく処理を実行するために、静止物体識別部41、車両移動状況算定部42、および、接近回避情報生成部43を設ける。
【0012】
静止物体識別部41は、上述のレーダ部21およびレーダ部22で得た各物標情報に基づいて静止物体(図1では静止物体RM1および静止物体RM2)を識別する。
静止物体識別部41は、この識別を行うために、密集状態識別処理部41−1、速度識別処理部41−2、および、静止物体認識処理部41−3を備えている。
密集状態識別処理部41−1は、空間位置が相互に所定間隔以内に接近した密集状態にある複数の電磁波反射部位を識別する。本実施の形態では、空間位置が相互に自車両VE1の全長Dに相当する間隔以内(d1,d2,d3)に接近した複数の電磁波反射部位(T11,T12,T13,T14;T21,T22,T23,T24)を密集状態にあるものと識別する。
【0013】
尚、図1においては、説明の便宜上、例示した静止物体RM1および静止物体RM2における各電磁波反射部位は相似的な分布を示すものと仮定している。
また、線図が錯綜することを避け、上述の各間隔を敢えてd1,d2,d3の限りに簡略化して表記している。実際に自車両VE1の全長Dと上述の各間隔との対比を実行するに際しては、全ての電磁波反射部位相互の組み合わせについて、これら相互の間隔を評価する。
【0014】
次に、速度識別処理部41−2は、該密集状態にあることを識別した複数の電磁波反射部位毎に、それらの相対速度を方位に応じて補正し、該補正した各相対速度が自車両VE1の走行速度と同等であるか否かを識別する。
更に、静止物体認識処理部41−3は、上記の密集状態にあると識別し且つ上記補正後の各相対速度が自車両VE1の走行速度と同等であると識別した複数の電磁波反射部位の集合について、該集合が一の静止物体(RM1、RM2)に対応するものと認識する。
【0015】
車両移動状況算定部42は、該一の静止物体に対応するこれら電磁波反射部位のうち自車両VE1の最至近位置にあるものの相対速度を一つの算定根拠として自車両VE1の移動状況を算定する。この算定は静止物体RM1(RM2)に関する自車両VE1の相対速度および方位に基づいて、移動速度および移動方向による移動ベクトルを算出する形態で実行し得る。
尚、図中、最至近位置にある電磁波反射部位は、静止物体RM1におけるT11および静止物体RM2におけるT21であるが、これらを含む所定範囲内の車両近傍領域に位置する電磁波反射部位であれば、その相対速度を上述の算定根拠として適用可能である。
【0016】
接近回避情報生成部43では、上述のようにして算定した自車両VE1の移動状況を判定基準として、周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を自車両VE1の走行を制御する車両制御装置50に供給する。
【0017】
(第1の実施の形態)
以上、図1を参照して概要を説明した本発明の一つの実施の形態に関し、より具体的な第1の実施の形態における構成および作用について、各該当する図面を参照して詳述する。
【0018】
(第1の実施の形態の構成)
図2は、本発明の第1の実施の形態における構成を表す機能ブロック図である。
図2において、本発明の第1の実施の形態としての車両移動状況検出装置100は、レーダヘッド部200、レーダ信号処理部300、および、物体認識部400を含む。
レーダヘッド部200は、(右側の)レーダセンサ部210および(左側の)レーダセンサ部220を含む。また、レーダ信号処理部300は、(右側の)レーダ信号処理部310および(左側の)レーダ信号処理部320を含む。
レーダセンサ部210およびレーダセンサ部220は、図1の右側のレーダ部21のレーダセンサ部分および左側のレーダ部22のレーダセンサ部分に各対応する。
【0019】
(右側の)レーダセンサ部210は、送信部21P、(右側の)第1受信部21Ra、および、第2受信部21Rbを含む。
送信部21Pは、送信用のアンテナ211、電力分配器(カプラ)212、および、VCO(Voltage Controlled Oscillator:電圧制御発振器)213を含む。電力分配器(カプラ)212はアンテナ211に送信用信号の電力を供給する。VCOは制御電圧に応じて周波数が変化する出力信号を発し、電力分配器212に供給する。
【0020】
また、第1受信部21Raは、受信用のアンテナ214、乗算器(ミキサ)215、および、増幅器216を含む。乗算器(ミキサ)215はアンテナ214の出力と電力分配器212から供給される信号(ローカル信号)とを乗算して中間周波数に変換した信号を得る。
一方、第2受信部21Rbは、受信用のアンテナ217、乗算器(ミキサ)218、および、増幅器219を含む。乗算器(ミキサ)219はアンテナ217の出力と電力分配器212から供給される信号(ローカル信号)とを乗算して中間周波数に変換した信号を得る。
【0021】
(右側の)レーダ信号処理部310は、三角波発生部311、FFT処理部312、FFT処理部313、および、物体情報検出部314を含む。
三角波発生部311は上述のVCO213、FFT処理部312、および、FFT処理部313にその出力信号(三角波)を供給する。
FFT処理部312は、三角波発生部311が供給した信号を用いて、第1受信部21Raに関する系統で上述のようにして得た中間周波数に変換された信号について周波数解析を行い、該解析結果を表す出力信号を物体情報検出部314に供給する。
【0022】
同様に、FFT処理部313は、上述の第2受信部21Rb関する系統で上述のようにして得た中間周波数に変換された信号について周波数解析を行い、該解析結果を表す出力信号を物体情報検出部314に供給する。
物体情報検出部314は、FFT処理部312およびFFT処理部313が各供給した解析結果を表す信号に基づいて、FM−CW方式により、該当する物標(電磁波反射部位T11,T12,T13,T14)の距離、相対速度、および、方位を含む物標情報を得る。
【0023】
即ち、レーダセンサ部210およびレーダ信号処理部310は、図1を参照して既述の右側のレーダ部21に対応する。
以上は、図2における右側のレーダ部の構成であるが、左側のレーダ部の系統も同様の構成を有する。
即ち、(左側の)レーダセンサ部220は、送信部22P、(左側の)第1受信部22Ra、および、第2受信部22Rbを含む。
【0024】
送信部22Pは、送信用のアンテナ221、電力分配器(カプラ)222、および、VCO223を含む。電力分配器(カプラ)222はアンテナ221に送信用信号の電力を供給する。VCO223は制御電圧に応じて周波数が変化する出力信号を発し、電力分配器222に供給する。
また、第1受信部22Raは、受信用のアンテナ224、乗算器(ミキサ)225、および、増幅器226を含む。乗算器(ミキサ)225はアンテナ224の出力と電力分配器222から供給される信号(ローカル信号)とを乗算して中間周波数に変換した信号を得る。
【0025】
一方、第2受信部22Rbは、受信用のアンテナ227、乗算器(ミキサ)228、および、増幅器229を含む。乗算器(ミキサ)229はアンテナ227の出力と電力分配器222から供給される信号(ローカル信号)とを乗算して中間周波数に変換した信号を得る。
(左側の)レーダ信号処理部320は、三角波発生部321、FFT処理部322、FFT処理部323、および、物体情報検出部324を含む。
【0026】
三角波発生部321は上述のVCO223、FFT処理部322、および、FFT処理部323にその出力信号(三角波)を供給する。
FFT処理部322は、三角波発生部321が供給した信号を用いて、第2受信部22Raに関する系統で上述のようにして得た中間周波数に変換された信号について周波数解析を行い、該解析結果を表す出力信号を物体情報検出部324に供給する。
【0027】
同様に、FFT処理部323は、上述の第2受信部22Rb関する系統で上述のようにして得た中間周波数に変換された信号について周波数解析を行い、該解析結果を表す出力信号を物体情報検出部324に供給する。
物体情報検出部314は、FFT処理部312およびFFT処理部313が各供給した解析結果を表す信号に基づいて、FM−CW方式により、該当する物標(電磁波反射部位T11,T12,T13,T14)の距離、相対速度、および、方位を含む物標情報を得る。
【0028】
即ち、レーダセンサ部210およびレーダ信号処理部310は、図1を参照して既述の右側のレーダ部21に対応する。
上述のようにして生成された(右側の)レーダ信号処理部310(その物体情報検出部314)の出力である物標情報を物体情報認識部400に供給する。また、(左側の)レーダ信号処理部320(その物体情報検出部324)の出力である物標情報を物体情報認識部400に供給する。
【0029】
上述のようなレーダ信号処理部300の後段に設けた物体情報認識部400は、静止物体識別410、車両移動状況算定部420、および、接近回避状況生成部430を含む。
静止物体識別部410は、上述の物体情報検出部314および物体情報検出部324が各供給した物標情報を解析し、静止物体を識別する検出物体識別部411を含む。
この検出物体識別部411は、静止物体識別処を実行するための、密集状態識別処理部411−1、速度識別処理部411−2、および、静止物体認識処理部411−3を含む。
【0030】
密集状態識別処理部411−1は、各電磁波反射部位の分布を二次元のマップに表した空間マップを作成し、このマップを利用して、空間位置が相互に所定間隔(例えば自車両VE1の全長相当の間隔)以内に接近した密集状態にある複数の電磁波反射部位を識別する。
【0031】
次いで、速度識別処理部411−2は、既述の密集状態にあることを識別した複数の電磁波反射部位毎にその方位に応じて補正した各相対速度が自車両VE1の走行速度と同等であるか否かを識別する。この識別に際して自車両VE1の走行速度が既知であることが必要であるが、この走行速度自体は、車両制御装置500側から供給する。
【0032】
更に、静止物体認識処理部411−3では、該密集状態にあり且つ相対速度が自車両VE1の走行速度と同等であると識別した複数の電磁波反射部位の集合について、それらが一の静止物体(静止物体RM1)に対応するものであると認識する。
一方、車両移動状況算定部420は、移動ベクトル検出部421を含む。この移動ベクトル検出部421は、静止物体識別部410(その検出物体解析部411)による解析結果に基づいて、静止物体であると識別した物体に対する相対速度および方位に基づいて自車両VE1の移動状況を算定する。この算定では、自車両VE1の移動速度および移動方向を表す移動ベクトルを得る。
【0033】
両移動状況算定部420の後段の接近回避情報生成部430は、接近状態判定部431を含む。この接近状態判定部431では、検出物体解析部411および移動ベクトル検出部421の各出力に基づいて周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を生成して車両制御装置500に供給する。
車両制御装置500では、この接近回避情報を受けて、接近回避のための適確な制御を実行する。
【0034】
(第1の実施の形態の作用)
次に、図2の構成を有する本発明の第1の実施の形態としての車両移動状況検出装置100の作用について、図3ないし図6を参照して説明する。
図3は、図2の車両移動状況検出装置100を自車両VEに搭載した状態での作用を表す概念図である。
図3において、後段にレーダ信号処理部310を接続したレーダセンサ部210は、このレーダセンサ部210が位置する自車両VEの右前側方から前方および右側方への所定の広がりを持つ探索覆域SARをカバーする。即ち、レーダセンサ部210およびレーダ信号処理部310によって探索覆域SAR内の物体610(物標である複数の電磁波反射部位611)、および物体630に関する物標情報を得る。
【0035】
また、後段にレーダ信号処理部320を接続したレーダセンサ部220は、このレーダセンサ部220が位置する自車両VEの左前側方から前方および左側方への所定の広がりを持つ探索覆域SALをカバーする。即ち、レーダセンサ部220およびレーダ信号処理部320によって探索覆域SAL内の物体620(物標である複数の電磁波反射部位621)に関する物標情報を得る。
【0036】
レーダ信号処理部310およびレーダ信号処理部320が各供給する物標情報を受けた物体認識部400が、静止物体を識別し、自車両VEの移動状況を算定し、接近回避情報を生成する。
自車両VEの移動状況は、図示の例では、直進方向に一定の大きさの速度を持つ移動ベクトルV0(実線図示)を成し、物体610および物体620の移動状況は、これらが静止物体である場合には、上記との対照において、移動ベクトルV0とは同量逆向きの各移動ベクトルV0r(破線図示)を成す。
【0037】
(FM−CW方式による距離および相対速度の検出)
次に、図4を参照して、本発明の各実施の形態で適用しているFM−CW方式による距離および相対速度の検出について、図2の第1の実施の形態でこれらの検出を実行する場合を例に説明する。
【0038】
図2の車両移動検出装置100のレーダ識別処理部300における三角波発生部311(321)で生成した図4(a)の三角波変調信号をVCO213(223)に供給し、VCO213(223)から図4(b)のように周波数が変化する送信信号を得る。
上記送信信号を送信用のアンテナ211(221)から放射し、電磁波反射部位(物標)で反射して戻った電磁波を受信用アンテナ214(217,224,227)で受信した受信信号は、図4(c)に実線図示したような周波数の変化を呈する。
【0039】
図4(c)では図4(b)の送信信号の周波数の変化を、対比のために破線図示している。
図4(c)より明らかなとおり、実線図示の反射波(電磁波反射部位からの反射信号)は、破線図示の送信信号に対し電磁波の往復に対応する時間の遅延を生じている。即ち、同一の時点では、実線図示の送信信号と実線図示の反射波とは、上記遅延時間に相応する周波数差を生じている。
【0040】
上述の周波数差を有する受信信号を、図2のレーダヘッド部210(220)におけるミキサ215(219,226,229)で 図4(b)の送信信号との混合によって中間周波数(IF)に変換し、図4(d)のようなIF信号を得る。
従って、図4(d)のIF信号の周波数(上記送受信の両信号間の周波数差)が、レーダヘッドから電磁波を発してから物標で反射し戻るまでの時間、即ち、距離に対応する。
【0041】
図4(d)のとおり、上述のIF信号の周波数は、f1およびf2の2種類出現する。これは、自車両VEが移動しているため、図4(a)の三角波変調信号によって周期的に周波数を増減させている送信信号およびこれの受信信号のそれぞれに対して、周波数のドップラーシフトが生じることに起因する。
三角波変調信号における周波数上昇区間と周波数下降区間におけるIF信号のペアリングを行い、両周波数f1およびf2の平均をとることにより、ドップラーシフトの影響を相殺して誤差を十分に低減した距離情報を得る。
また一方、ドップラーシフトの現象を利用して、ペアリングを行った両周波数f1およびf2の差分に基づいて、相対速度の情報を得る。
【0042】
(FM−CW方式による方位の検出)
次に、図5を参照して、本発明の実施の形態に適用するレーダ装置によって方位情報を得る方法について説明する。
図5は、受信系を2系統として各系統で受信する反射信号の位相差に基づいて方位を割り出す位相モノパルス方式における方位情報取得の様子を表す図である。
以下には、説明の便宜上、図2のレーダヘッド部200の(右側の)レーダセンサ部210における検出出力に基づいて方位情報を得る場合について説明する。
【0043】
図2におけるレーダセンサ部210の各受信用のアンテナ214および217のアンテナゲインを各2分の1にすると共に、これら両アンテナ214および217の間隔を方位の検出に適合するように設定する。この値は、予定した仕様に応じて適宜の値とする。
位相モノパルス方式では、電磁波の波長をλ、両アンテナ214および217の間隔をd0、両アンテナ214および217に係る受信の位相差φから次の数式(1)によって方位γが割り出される。
【0044】
【数1】
【0045】
ここに一つの具体例を想定して、この場合に検出方位の範囲に対応する反射信号の位相差について例示する。即ち、電磁波として24GHzのマイクロ波を用い、横方向(水平面内の方向)に90度の広がりを有する探索覆域内で物標の方位を検出することを前提に、両アンテナの間隔d0を4.4mmに配置する場合を想定する。
【0046】
この想定のもとでは、上述のような探索覆域内で物標の方位が+45度から−45度の範囲で変化したときには、両アンテナで受信される反射信号の位相差が+90度から−90度の範囲の値を示すことになる。
以上は、図2における(右側の)レーダセンサ部210の各受信用のアンテナ214および217を用いて方位を検出する場合の例であるが、この検出方法は、(左側の)レーダセンサ部220の各受信用のアンテナ224および227を用いて方位を検出する場合についても同様である。
上述の数式(1)に基づく演算は、図2の車両移動状況検出装置100のレーダ信号処理部300における物体情報検出部314および324において実行し、方位情報を得る。
【0047】
(自車両の移動ベクトルの算定処理)
次に、図6を参照しつつ、図2の車両移動状況検出装置100における自車両の移動ベクトルの算定処理について説明する。
図6は、図2の車両移動状況検出装置100において静止物体を識別する作用について説明するための図である。
図2を参照して既述のように、物体情報検出部314(324)は、物標情報(当該物標の、距離、相対速度、および、方位を表す各情報)を静止物体識別部410に供給する。
【0048】
静止物体識別部410は、この方位を表す方位情報を用いて、次の数式(2)の如く各物標(各電磁波反射部位)に関し、当初に得た相対速度の値Vd0を補正し、補正値Vdを得る。
【0049】
【数2】
【0050】
数式(2)に基づいて補正した各電磁波反射部位毎の相対速度Vdが車両(自車両)VEの車速V0と同等である場合に、これら複数の電磁波反射部位の集合が、路側の静止物体に対応するものであると判定する。
尚、この判定に際して適用する車両(自車両)VEの車速V0としては、一般的に、車両制御装置500が車両の走行時においては検出(認識)している例えば速度計による車速情報を適用する。
【0051】
このような車速情報は、従来の技術について説明したように、高速走行や悪天候におけるようにタイヤがスリップし易い条件下では、操舵角と車両の進行方向との関係が非線形を呈することがあり、必ずしも検出精度が高いものではない。
しかしながら、該判定に適用する自車両の移動状況に係る情報は、静止物体であることを識別する限りにおいて所要の精度を充足していればよく、この意味での要求精度を充足するには既述の従来技術でも不足はない。
【0052】
本発明の実施の形態では、このようにして路側の静止物体に対応するものであることを判定した各電磁波反射部位のうち、車両(自車両)VEから最至近にある物標(図6では、電磁波反射部位611,621)に着目し、これらの物標に関する物標情報を利用する。
即ち、車両(自車両)VEから最至近にある物標に関する物標情報(当該物標の、距離、上述のように補正した相対速度、および、方位を表す各情報)を、図2中、物体認識部400の車両移動状況算定部420における移動ベクトル検出部421に供給する。
【0053】
移動ベクトル検出部421では、該供給された物標情報に基づいて自車両VEの移動ベクトルを算定する。
図6におけるレーダセンサ部210の探索覆域SAR1内の物体610に関する電磁波反射部位611について、その相対速度Vd1を図示の如く算定する。この場合、電磁波反射部位611の方位角(検出値)をα、自車両VEの向きをθとする。
【0054】
また、レーダセンサ部220の探索覆域SAL1内の物体620に関する電磁波反射部位621について、その相対速度Vd2を図示の如く算定する。この場合、電磁波反射部位611の方位角(検出値)をα+β、自車両VEの向きをθとする。
これらの相対速度Vd1およびVd2を適用して、向きがθ、大きさ(移動速度の絶対値)がVrefである自車両VEの移動ベクトルを、次の数式(3)および数式(4)に基づいて算定する。
【0055】
【数3】
【0056】
【数4】
【0057】
図2中、物体認識部400の車両移動状況算定部420における移動ベクトル検出部421で上述のように自車両VEの移動ベクトルを算定し、この移動ベクトルのデータを、物体認識部400の接近回避情報生成部430における接近状態判定部431に供給する。
【0058】
接近状態判定部431では、移動ベクトルのデータ(Vref,θ)と該当する物体(物標)の位置データとに基づいて、この物体に接近する蓋然性(その程度)を判定し、この蓋然性を低減するための接近回避情報を生成して、車両制御装置500に供給する。
車両制御装置500では、この接近回避情報を受けて、接近回避のための適確な制御を実行する。
【0059】
(第1の実施の形態における処理の流れ)
次に、本発明の実施の形態としての車両移動状況検出装置100における処理の流れについて説明する。
図7は、車両移動状況検出装置100の動作を表すフローチャートである。
先ず、各レーダ部(21,22;レーダヘッド部200+レーダ信号処理部300)によって探索覆域内の物標を探索し、各物標の物標情報(物標たる各電磁波反射部位の、距離および相対速度ならびに方位を表す各情報)を得る(ステップS701)。
ステップS701で取得した各物標情報(距離情報、方位情報)に基づいて、静止物体識別部410(その検出物体解析部411)が、各物標の分布を二次元のマップに表した空間マップを作成する(ステップS702)。
【0060】
また、検出物体解析部411では、ステップS701で取得した各物標情報のうち相対速度情報について、各対応する方位情報に応じて、物標毎の相対速度値を補正する(ステップS703)。
更に、検出物体解析部411では、ステップS702で作成した空間マップを参照して、空間位置が相互に自車両VEの全長(或いは、平均的な車両長)よりも短い間隔となる程度に近接した密集状態にある物標群を識別する(ステップS704)。
【0061】
本実施の形態では、ステップS704で当該密集状態にあると識別した物標群を、既述のとおり、静止物体に対応するものとして扱う。
次いで、検出物体解析部411では、ステップS703で補正した物標の相対速度が自車両の走行速度と同程度であるか否かを判断する(ステップS705)。
ステップS705で、同等であると判断したときには(ステップ705:Yes)、ステップS704で当該密集状態にあると識別した物標群のうち自車両から最至近にある物標の相対速度および方位に基づいて、自車両の移動ベクトルを算定する(ステップS706)。
【0062】
ステップS706で算定した移動ベクトルのデータの供給を受けて、接近回避情報生成部430(その接近状態判定部431)が、物標の位置と移動ベクトルとによれば、自車両VEが周囲物体(物標として捕捉したもの)に接近する蓋然性があるか否かを判断する(ステップS707)。
ステップS707で、自車両VEが物体に接近する蓋然性があると判断したときには(ステップS707:Yes)、接近状態判定部431は、接近フラグを付加した接近回避情報を車両制御装置500に供給して(ステップS708)、処理を終了する。
【0063】
一方、ステップS705で物標の補正後の相対速度が自車両の走行速度と同等ではないと判断したときには、ステップS702で作成した空間マップのデータを車両制御装置500に供給して(ステップS709)、処理を終了する。
また、ステップS707で自車両VEが物体に接近する蓋然性がないと判断したときにも(ステップS707:No)、ステップS702で作成した空間マップのデータを車両制御装置500に供給して(ステップS709)、処理を終了する。
【0064】
(第1の実施の形態の効果)
(1−1)レーダヘッド部200、レーダ信号処理部300、静止物体識別部410、および、車両移動状況算定部420を備えている。
レーダヘッド部200(右側および左側のレーダセンサ部210;220)およびレーダ信号処理部300(右側および左側のレーダ信号処理部310;320)で物標情報を取得する。該取得した物標情報を用いて、静止物体識別部410(その検出物体解析部411)が静止物体を識別する。
該識別した静止物体の情報には、原理上タイヤのスリップ等に起因する誤差が混入することがない。このような確固たる静止物体の情報を基準にして車両移動状況算定部420(その移動ベクトル検出部421)が自車両の移動状況を適確に検出することが可能になる。
【0065】
即ち、対地速度検出のための専用の装置等を用いずに自車両の移動状況を適確に検出することが可能になる。
(1−2)静止物体識別部410は検出物体識別部411を含んでおり、この検出物体識別部411に、静止物体識別処を実行するための、密集状態識別処理部411−1、速度識別処理部411−2、および、静止物体認識処理部411−3を含む。
【0066】
更に、静止物体識別部410で識別した静止物体に関する相対速度および方位に基づいて自車両の移動状況を算定する車両移動状況算定部420を備えている。
車両移動状況算定部420では、上記(1−1)の静止物体識別部410での認識による静止物体の電磁波反射部位のうち自車両VEの最至近位置にある電磁波反射部位(この近傍の部位でもよい)に関する相対速度に基づいており、算定の精度が高い。
(1−3)静止物体識別部410が、上記(1−1)の密集状態識別処理として、空間位置が相互に自車両VEの全長Dに相当する間隔以内に接近した密集状態にある複数の電磁波反射部位を識別することによってこの識別を行うため、簡易で確実な識別が可能である。
(1−4)接近回避情報生成部430では、上記(1−2)の車両移動状況算定部420によって算定した自車両の移動速度に基づいて(該移動速度を一つの判定基準として)、周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を生成するため、周囲物体に接近する蓋然性を確実に低減できる。
(1−5)車両移動状況算定部を、上記(1−1)の静止物体識別部410で識別した静止物体の相対速度および方位に基づいて自車両VEの移動速度および移動方向を表す移動ベクトルを算出するように構成した。
【0067】
更に、接近回避情報生成部430では、車両移動状況算定部420で算出した移動ベクトルに基づいて、周囲物体に接近する蓋然性を判定しこの蓋然性を低減するための接近回避情報を車両制御装置に供給するように構成した。
このため、車両制御装置は、確度の高い情報に依拠して、周囲物体に接近する蓋然性を低減するための制御を実行することが可能になる。
【0068】
(第2の実施の形態)
以上では、各レーダセンサ部の探索覆域を、自車両VEの前部における右および左の側方からそれぞれ右および左側方への所定の広がりを持つように設定した場合につき説明した。
次に、各レーダセンサ部の探索覆域を、自車両VEの後部における右および左の側方からそれぞれ右および左側方への所定の広がりを持つように設定した第2の実施の形態について説明する。
【0069】
(第2の実施の形態の構成および作用)
図8は、第2の実施の形態の構成および作用を表す図である。2の実施の形態では、図2の車両移動状況検出装置100と実質的に同様の構成を有する車両移動状況検出装置を、該装置の両レーダセンサ部の探索覆域が自車両VEの後部右および左の側部位からそれぞれ右側方および左側方に各所定の広がりを呈するように設置している。
【0070】
図8のように各レーダセンサ部の探索覆域SAR2およびSAL2を設定する場合も、各探索覆域内の物標検出作用については、図2および図6を参照して既述の場合と本質的に相違しない。
図示の場合、探索覆域SAR2に、物標として検出される電磁波反射部位631の集合を含む物体630が存在し、探索覆域SAL2には、物標として検出される電磁波反射部位641の集合を含む物体640が存在するものと想定している。
【0071】
この場合における物体630および物体640の存在、および、これらの物体に関する上述のような物標情報は、図6における探索覆域SAR1における物体610および探索覆域SAL1における物体620に対する場合と原理上は全く同様に取得することができる。
即ち、図8の場合においても、物体630に属する複数の物標(電磁波反射部位)のうち自自車両VEから最至近にある物標631、および、物体640に属する複数の物標(電磁波反射部位)のうち自車両VEから最至近にある物標641にそれぞれ着目する。
【0072】
図8に示すこれらの物標631および641の相対速度V'd1およびV'd2を、図6を参照して既述の相対速度Vd1およびVd2に替えて適用し、静止物体を識別し、該識別した静止物体を表す情報を基準に自車両VEの移動ベクトルを算定する。
本実施の形態では、以上のようにして、自車両VEの後側方の静止物体を識別し、該識別した静止物体を基準に自車両VEの移動ベクトルを算定することが可能である。
【0073】
(第2の実施の形態の効果)
(2−1)各レーダセンサ部210bおよび220bを、自車両VEの後部における右側方および左側方に設ける。この場合、レーダセンサ部210bおよび220bの探索覆域は自車両VEの後部における右側方および左側方から、それぞれ、右側方および左側方に各所定の広がりを呈するように設定する。
【0074】
これらのレーダセンサ部210bおよび220b自体の各構成は、図6を参照して既述のレーダセンサ部210および220と相違がなく、それらの探索覆域が自車両VEの後方から右側方および左側方に各所定の広がりを呈する点が異なる。
従って、自車両VEの後方の右側方および左側方の物体について、自車両VEの後方から右側方および左側方に各所定の広がりを呈する探索覆域内に捕捉した物体について、第1の実施の形態におけるものと等しい精度を持って、該物体が静止物体であることを認識できる。
【0075】
(第3の実施の形態)
以上、第1の実施の形態では、自車両VEの前部から両側方に向けて探索覆域更形成し、第2の実施の形態では、自車両VEの後部から両側方に向けて探索覆域更形成し、探索覆域内に捕捉した静止物体を基準に自車両VEの移動状況を算定するように構成した。
【0076】
本発明の第3の実施の形態では、レーダの各レーダセンサ部を自車両VEの前および後の各側方に設置し、図6に示した探索覆域SAR1およびSAL1と、図8に示した探索覆域SAR2およびSAL2との、4領域をカバーするように構成する。
即ち、前方レーダ部によって図6に示したような探索覆域SAR1およびSAL1をカバーし、且つ、後方レーダ部によって図8に示したような探索覆域SAR2およびSAL2をカバーする態様を採ることができる。
【0077】
図9は、自車両前方の両側方および自車両後方の両側各方探索覆域をカバーするようにレーダ部を設置した実施の形態における構成を表す機能ブロック図である。
図9の車両移動情報識別装置900において、前側方物体認識装置100aで図6の探索覆域SAR1およびSAL1と同様の探索覆域をカバーし、後側方物体認識装置100bで図8の探索覆域SAR2およびSAL2をカバーする。
【0078】
前側方物体認識装置100aは、前方レーダ部110aと物体認識部400aを含み、この物体認識部400aが、静止物体識別部410aおよび接近回避情報生成部430aを含む。
前方レーダ部110aは、図2のレーダヘッド部200におけるレーダセンサ部210と同様の(右側の)レーダセンサ部210a、および、レーダ信号処理部310と同様の(右側の)レーダ信号処理部310aを備えている。
【0079】
前方レーダ部110aは、更に、図2のレーダヘッド部200におけるレーダセンサ部220と同様の(左側の)レーダセンサ部220a、および、レーダ信号処理部320と同様の(左側の)レーダ信号処理部320aを備えている。
(右側の)レーダセンサ部210aは、アンテナ211a、214a、および、217aを備えている。
(左側の)レーダセンサ部220aは、アンテナ221a、224a、および、227aを備えている。
【0080】
前方レーダ部110aは、図2のレーダヘッド部200およびレーダ信号処理部300と同様に機能して、FM−CW方式により、該当する物標(電磁波反射部位)の距離、相対速度、および、方位を含む物標情報を、(右側および左側とも該当する場合には)それぞれ得る。
【0081】
物体認識部400aは、前方レーダ部110aからの上述の物標情報を得て、図2の物体認識部400と同様に静止物体識別部410a(その検出物体解析部411a)で物標情報を解析し、静止物体を識別する。
検出物体解析部411aは、静止物体識別処を実行するための、密集状態識別処理部411a1、速度識別処理部411a2、および、静止物体認識処理部411a3を含む。この構成を図2と対照すると、検出物体解析部411a1は密集状態識別処理部411−1に、速度識別処理部411a2は速度識別処理部411−2に、各相応する。更に、静止物体認識処理部411a3は静止物体認識処理部411−3に相応する。
【0082】
更に、該識別した静止物体の情報を利用して、車両移動状況検出装置900の車両移動状況算定部4200(その自車両移動ベクトル検出部4210)で、自車両VEの移動ベクトルを算定する。
該算定した移動ベクトルのデータおよび該識別した静止物体の情報を利用して、接近回避情報生成部430a(その接近状態判定部431a)で周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を生成して車両制御装置500に供給する。
【0083】
以上は、図9の車両移動状況検出装置900の前方レーダ部110aの系統に関する構成および作用であるが、この車両移動状況検出装置900の後方レーダ部110bの系統に関する構成および作用も略同様である。
即ち、後側方物体認識装置100bは、後方レーダ部110bと物体認識部400bを含み、この物体認識部400bが、静止物体識別部410bおよび接近回避情報生成部430bを含む。
【0084】
後方レーダ部110bは、(右側の)レーダセンサ部210b、(右側の)レーダ信号処理部310b、(左側の)レーダセンサ部220b、および、(左側の)レーダ信号処理部320bを備えている。
(右側の)レーダセンサ部210bは、アンテナ211b、214b、および、217bを備え、(左側の)レーダセンサ部220bは、アンテナ221b、224b、および、227bを備えている。
【0085】
後方レーダ部110bも、図2のレーダヘッド部200およびレーダ信号処理部300と同様に機能して、FM−CW方式により、該当する物標(電磁波反射部位)の距離、相対速度、および、方位を含む物標情報を、(右側および左側とも該当する場合には)それぞれ得る。
物体認識部400bは、前方レーダ部110bからの上述の物標情報を得て、図2の物体認識部400と同様に静止物体識別部410b(その検出物体解析部411b)で物標情報を解析し、静止物体を識別する。
【0086】
検出物体解析部411bは、静止物体識別処を実行するための、密集状態識別処理部411b1、速度識別処理部411b2、および、静止物体認識処理部411b3を含む。この構成を図2と対照すると、検出物体解析部411b1は密集状態識別処理部411−1に、速度識別処理部411b2は速度識別処理部411−2に、各相応する。更に、静止物体認識処理部411b3は静止物体認識処理部411−3に相応する。
【0087】
更に、該識別した静止物体の情報を利用して、車両移動状況算定部4200(その自車両移動ベクトル検出部4210)で、自車両VEの移動ベクトルを算定する。
該算定した移動ベクトルのデータおよび該識別した静止物体の情報を利用して、接近回避情報生成部430b(その接近状態判定部431b)で周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を生成して車両制御装置500に供給する。
車両制御装置500では、上述の各接近回避情報を受けて、接近回避のための適確な制御を実行する。
【0088】
(第3の実施の形態の作用)
図10は、図9の車両移動状況検出装置900において静止物体を識別する作用について説明するための図である。図10において、既述の図6および図8との対応部には同一の参照符号を附してある。
【0089】
尚、前方のレーダに関し、図6におけるレーダセンサ部210およびレーダセンサ部220には、図10中、車両移動状況検出装置900における前方レーダ部110aの(右側の)レーダセンサ部210aおよび(左側の)レーダセンサ部220bが各対応している。
また、後方のレーダに関し、図8におけるレーダセンサ部210bおよびレーダセンサ部220bには、車両移動状況検出装置900における後方レーダ部110bの(右側の)レーダセンサ部210bおよび(左側の)レーダセンサ部220bが各対応している。
【0090】
車両移動状況検出装置900では、前方レーダ部110a(右側のレーダセンサ部210a;左側のレーダセンサ部220a)の系統で、図6を参照して既述のように、自車両VEから最至近の静止物体上の物標の物標情報に基づいて自車両VEの移動ベクトルを算定する。
同様に、後方レーダ部110b(右側のレーダセンサ部210b;左側のレーダセンサ部220b)の系統で、図8を参照して既述のように、自車両VEから最至近の静止物体上の物標の物標情報に基づいて自車両VEの移動ベクトルを算定する。
車両移動状況検出装置900では、これらの移動ベクトルの算定は、車両移動状況算定部4200(その自車両移動ベクトル検出部4210)で実行する。
【0091】
(第3の実施の形態の効果)
(3−1)自車両VEの前部における右側方および左側方には、レーダセンサ部210aおよび220aを設け、自車両VEの後部における右側方および左側方には、レーダセンサ部210bおよび220bを設けた。
【0092】
この場合、レーダセンサ部210aおよび220aによって図6の各探索覆域SAR1およびSAL1と同様の探索覆域をカバーし、且つ、レーダセンサ部210bおよび220bによって図8の探索覆域SAR2およびSAL2と同様の探索覆域をカバーする。
これらのレーダセンサ部210bおよび220b自体の各構成は、図6を参照して既述のレーダセンサ部210および220と相違がなく、それらの探索覆域が自車両VEの後方から右側方および左側方に各所定の広がりを呈する点が異なる。
【0093】
従って、自車両VEの前側の右側方および左側方、或いは、後側の右側方および左側方の何れか一つの探索覆域を持つ構成に比し、自車両VE周囲を相対的に広い探索覆域でカバーすることができ、周囲物体の検出確率が高くなる。
【0094】
(第4の実施の形態)
一方、本発明は、長距離レーダをも併せ用いた形態で実施することが可能である。
図11は、このような長距離レーダを利用した本発明第4の実施の形態としての車両移動状況検出装置を表す機能ブロック図である。
また、図12は、図11の車両移動状況検出装置の作用を説明するための図である。
図11において、既述の図9との対応部には同一の参照符号を附し、それらについての各個の説明は省略する。
【0095】
また、図12において、既述の図8との対応部には同一の参照符号を附し、それらについての各個の説明は省略する。
更に、図11と図12は、同一の実施の形態に関する図であり、両者間での参照符号の割り当ては整合させてある。
図11の車両移動状況検出装置1100では、図9の装置における後側方物体認識装置100bと略同様の構成の後方物体認識装置1100bを有する。この後方物体認識装置1100bでは、自車両VEの後側方に設定した各探索覆域の物標(物体)を検出し、静止物体の識別を行い、自車両の移動ベクトルを算定する。
【0096】
即ち、図9の装置における後側方物体認識装置100bの後方レーダ部110bと同様にして、FM−CW方式により、該当する物標(電磁波反射部位)の距離、相対速度、および、方位を含む物標情報を取得する。
該取得した物標情報に基づいて、物体認識部450bで、静止物体の識別、自車両の移動ベクトルの算定し、および、周囲物体との接近の蓋然性の判定、ならびに、この蓋然性を低減するための接近回避情報の生成を行う。
【0097】
物体認識部450bにおける、静止物体の識別は、静止物体識別部410bの検出物体解析部411bで行う。検出物体解析部411bは、静止物体識別処を実行するための、密集状態識別処理部411b1、速度識別処理部411b2、および、静止物体認識処理部411b3を含む。
また、本実施の形態では、自車両の移動ベクトルの算定を行う車両移動判定部4300(その自車両移動ベクトル検出部4310)を有する。
【0098】
更に、周囲物体との接近の蓋然性の判定、ならびに、この蓋然性を低減するための接近回避情報の生成を行う接近回避情報生成部430b(その接近状態判定部431b)を有する。
一方、図11の実施の形態では、長距離レーダ部700は、既述の側方物体検出用のレーダと同様のFM−CW方式等を採る。
【0099】
即ち、この長距離レーダ部700は、送信用のアンテナ711、電力分配器(カプラ)712、VCO713、受信用のアンテナ714、乗算器715、増幅器716、三角波発生部731、FFT処理部732、および、物体情報検出部734を含む。
既述の場合と同様に、乗算器715の出力であるIF信号のFFT出力から物体情報検出部734でその距離および相対速度を検出する。この長距離レーダ部700は、既述の前側の右および左側方、ならびに、後側の右および左側方探索覆域を持つ各レーダ部に比し、遠方に広がった(長く前方に向かって広がった)探索覆域SAF(図12)を持ち、該探索覆域に存在する物標毎にその距離および相対速度ならびに方位をそれぞれ検出する。
【0100】
(第4の実施の形態の作用)
図12に示したとおり、上述の後方物体認識装置1100bに係る後方レーダ部110bの探索覆域SAR2、SAL2は、図8を参照して既述のものと変わりがない。想定した物体(物標)の存在や物標情報についても図8の場合と同様であり、図12では表記を簡略化している。
【0101】
長距離レーダ部700の物体情報検出部734の出力に基づいて、物体認識部740の先行車認識部741で、図12に表記の探索覆域SAF内の先行車両VEpの相対速度Vtおよび方位θtを算定する。
更に、物体認識部740の接近状態判定部742が、これら相対速度Vtおよび方位θtの各データ、ならびに、上述の自車両移動ベクトル検出部4310からの移動ベクトルのデータに基づいて、周囲物体との接近の蓋然性を算定し、接近回避情報を生成する。
【0102】
接近状態判定部742では、この周囲物体との接近の蓋然性の算定、および、接近回避情報を生成に際して、上述の物体認識部450aにおける接近回避情報生成部430b(その接近状態判定部431b)における出力データをも参照する。
物体認識部450b(その接近状態判定部431b)で得た接近回避情報、および、物体認識部740(その接近状態判定部742)で得た接近回避情報を、それぞれ、車両制御装置500に供給する。
【0103】
車両制御装置500では、この接近回避情報を受けて、接近回避のための適確な制御を実行する。
長距離レーダ部700は、所謂狭角レーダ装置であり、例えば、横方向(車載の場合には、車両の前部に前向きに実装したときの幅方向)に20度ないし30度の探索覆域SAFを形成する。
(第4の実施の形態の効果)
(4−1)この実施の形態における長距離レーダ部700の探索覆域SAFは、縦方向(車載の場合には、車両の前部に前向きに実装したときの進行方向)に150メートル程度の領域である。このような領域内で、物標の距離および相対速度ならびに方位をそれぞれ表す物標情報を得る。
【0104】
物標の検出方式としては、例えば、既述の側方物体検出用のレーダと同様のFM−CW方式等を採るが、方位検出に関しては、更に高精度かつ高分解能の方式を採り得る。
(変形例)
レーダ装置による方位検出には、例えば、送受信アンテナの向きを機械的に横方向に走査する方式や、受信にフェイズドアレイアンテナを適用し受信した電磁波の位相差に基づいて方位を検出する方式等がある。
【0105】
このような方式を適用することによって、探索覆域SAF内の先行車両の方位θt(図12)に関して、更に高精度かつ高分解能の検出を行うことが可能である。
尚、図11および図12を参照して説明した実施の形態では、側方検出用のレーダ部を自車両VEの後方に設け、これによる探索覆域を、自車両VEの後方に向けるように設定したが、第4の実施の形態で採用可能な構成はこの限りではない。
【0106】
即ち、側方検出用のレーダ部を自車両VEの前方に設け、これによる探索覆域を、自車両VEの前方に向けるように設定する構成を採ることも可能である。
以上述べた本発明の各実施の形態において、レーダ部ではマイクロ波帯以上の周波数帯域の電磁波を用いる。
図13は、本発明の各実施の形態としての車両移動状況検出装置のレーダ部で用いる電磁波の周波数帯域を表す図である。
【0107】
本発明の各実施の形態では、図示のようなマイクロ波帯以上の周波数帯域の電磁波を用いるが、図13におけるマイクロ波帯のうちでも、SHF帯(3GHz〜30GHzの帯域で、この帯域をマイクロ波帯と称する場合がある)ないしそれ以上のEHF帯(30GHz〜0.3THzの帯域)を用いると、直進性の強い特性によって、方位の検出に関して、高精度かつ高分解能の検出を行うことが可能になるという利点がある。
【図面の簡単な説明】
【0108】
【図1】本発明の実施の形態の概要を表す概念図である。
【図2】本発明の第1の実施の形態における構成を表す機能ブロック図である。
【図3】図2の車両移動状況検出装置を車両に搭載した状態での作用を表す概念図である。
【図4】本発明の各実施の形態で適用しているFM−CW方式における電磁波の放射と受信の様子を表す図である。
【図5】発明の実施の形態で適用しているレーダ装置で方位情報を得る方法について説明するための図である。
【図6】図2の車両移動状況検出装置における自車両の移動ベクトルの算定処理について説明するための図である。
【図7】図2の車両移動状況検出装置における全体的な処理の流れを表すフローチャートである。
【図8】本発明の第2の実施の形態を説明するための図である。
【図9】本発明の第3の実施の形態における構成を表す機能ブロック図である。
【図10】図9の車両移動状況検出装置における静止物体識別作用について説明するための図である。
【図11】本発明の第4の実施の形態を表す機能ブロック図である。
【図12】図11の車両移動状況検出装置の作用を説明するための図である。
【図13】本発明の各実施の形態としての車両移動状況検出装置のレーダ部で用いる電磁波の周波数帯域を表す図である。
【符号の説明】
【0109】
21,22 レーダ部
41,410,410a 静止物体識別部
41−1,411−1,411a−1,411b−1 密集状態識別処理部
41−2,411−2,411a−2,411b−2 速度識別処理部
41−3,411−3,411a−3,411b−3 静止物体認識処理部
42,420 車両移動状況算定部
43,430 接近回避情報生成部
50,500 車両制御装置
100,900 車両移動状況検出装置
100a 前側方物体認識装置
100b 後側方物体認識装置
110a 前方レーダ部
110b 後方レーダ部
200 レーダヘッド部
210 (右側の)レーダセンサ部
220 (左側の)レーダセンサ部
300 レーダ信号処理部
310 (右側の)レーダ信号処理部
320 (左側の)レーダ信号処理部
400 物体認識部
410,410a,410b 静止物体識別部
420,420a,420b 車両移動状況算定部
421 移動ベクトル検出部
420,430a、430b 接近回避情報生成部
700 長距離レーダ装置
4200 車両移動状況算定部
4210,4300 自車両移動ベクトル検出部
VE,VE1 自車両
【特許請求の範囲】
【請求項1】
自車両側方の所定の探索覆域に存在する電磁波反射部位毎に当該電磁波反射部位の距離、相対速度、および、方位を含む物標情報をそれぞれ得るレーダ部と、
前記レーダ部で得た各物標情報と自車速とに基づいて静止物体を識別する静止物体識別部と、
前記静止物体識別部で識別した静止物体の相対速度および方位に基づいて自車両の移動状況を算定する車両移動状況算定部と、
を備え、
前記静止物体識別部は、
前記レーダ部で検出した電磁波反射部位のうちから相互に所定間隔以内に接近した密集状態にある複数の電磁波反射部位の集合を識別する密集状態識別処理部と、
前記密集状態識別処理部において該密集状態にあることを識別した複数の電磁波反射部位毎にその方位に応じて補正した各相対速度が自車両の走行速度と同等であるか否かを識別する速度識別処理部と、
前記速度識別処理部によって相対速度が自車両の走行速度と同等であると識別した当該複数の電磁波反射部位の集合が一の静止物体に対応するものと認識する静止物体認識処理部と、を備え、
前記車両移動状況算定部は、前記静止物体認識処理部において一の静止物体に対応するものと認識した複数の電磁波反射部位のうち自車両の最至近位置にあるものの相対速度に基づいて自車両の移動状況を算定することを特徴とする車両移動状況検出装置。
【請求項2】
前記密集状態識別処理部は、空間位置が相互に自車両の全長に相当する間隔以内に接近した密集状態にある複数の電磁波反射部位を識別することを特徴とする請求項1に記載の車両移動状況検出装置。
【請求項3】
前記車両移動状況算定部によって算定した自車両の移動速度に基づいて、周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を自車両の走行を制御する車両制御装置に供給する接近回避情報生成部を更に備えたことを特徴とする請求項1ないし2の何れか一項に記載の車両移動状況検出装置。
【請求項4】
前記車両移動状況算定部は、前記静止物体識別部で識別した静止物体の相対速度および方位に基づいて自車両の移動速度および移動方向を表す移動ベクトルを算出し、
前記車両移動状況算定部で算出した該移動ベクトルに基づいて、周囲物体に接近する蓋然性を判定しこの蓋然性を低減するための接近回避情報を自車両の走行を制御する車両制御装置に供給する接近回避情報生成部を更に備えたことを特徴とする請求項1ないし3の何れか一項に記載の車両移動状況検出装置。
【請求項5】
前記レーダ部を、自車両の前部および後部の側方位置から前方および後方に向かって一定の広がりを持つような各探索覆域を持つようにそれぞれ設置したことを特徴とする請求項1ないし4の何れか一項に記載の車両移動状況検出装置。
【請求項6】
自車両の前部両側部位の中間位置から前記レーダ部の探索覆域よりも遠方に向かって広がった探索覆域を持ち該探索覆域に存在する電磁波反射物体における電磁波反射部位毎に当該電磁波反射部位の距離および相対速度ならびに方位をそれぞれ検出する長距離レーダ部を更に設置し、前記静止物体識別部は、前記長距離レーダ部の各検出出力をも用いて静止物体を識別することを特徴とする請求項1ないし5の何れか一項に記載の車両移動状況検出装置。
【請求項7】
前記複数の各レーダ部は、マイクロ波帯以上の周波数帯域の電磁波を用いることを特徴とする請求項1ないし6の何れか一項に記載の車両移動状況検出装置。
【請求項8】
自車両側方の所定の探索覆域に存在する電磁波反射部位毎に当該電磁波反射部位の距離、相対速度、および、方位を含む物標情報をレーダ部で取得する物標情報取得ステップと、
前記物標情報取得ステップで取得した当該物標情報と自車速とに基づいて静止物体を識別する静止物体識別ステップと、
前記静止物体識別ステップで識別した静止物体の相対速度および方位に基づいて自車両の移動状況を算定する車両移動状況算定ステップと、
を含み、
前記静止物体識別ステップは、
前記物標情報取得ステップで取得した物標情報に基づいて当該電磁波反射部位のうちから相互に所定間隔以内に接近した密集状態にある複数の電磁波反射部位の集合を識別する密集状態識別ステップと、
前記密集状態識別ステップにおいて該密集状態にあることを識別した複数の電磁波反射部位毎にその方位に応じて補正した各相対速度が自車両の走行速度と同等であるか否かを識別する速度識別ステップと、
前記速度識別ステップによって相対速度が自車両の走行速度と同等であると識別した当該複数の電磁波反射部位の集合が一の静止物体に対応するものと認識する静止物体認識ステップと、を含み、
前記車両移動状況算定ステップは、前記静止物体認識ステップにおいて一の静止物体に対応するものと認識した複数の電磁波反射部位のうち自車両の最至近位置にあるものの相対速度に基づいて自車両の移動状況を算定する
ことを特徴とする車両移動状況検出方法。
【請求項1】
自車両側方の所定の探索覆域に存在する電磁波反射部位毎に当該電磁波反射部位の距離、相対速度、および、方位を含む物標情報をそれぞれ得るレーダ部と、
前記レーダ部で得た各物標情報と自車速とに基づいて静止物体を識別する静止物体識別部と、
前記静止物体識別部で識別した静止物体の相対速度および方位に基づいて自車両の移動状況を算定する車両移動状況算定部と、
を備え、
前記静止物体識別部は、
前記レーダ部で検出した電磁波反射部位のうちから相互に所定間隔以内に接近した密集状態にある複数の電磁波反射部位の集合を識別する密集状態識別処理部と、
前記密集状態識別処理部において該密集状態にあることを識別した複数の電磁波反射部位毎にその方位に応じて補正した各相対速度が自車両の走行速度と同等であるか否かを識別する速度識別処理部と、
前記速度識別処理部によって相対速度が自車両の走行速度と同等であると識別した当該複数の電磁波反射部位の集合が一の静止物体に対応するものと認識する静止物体認識処理部と、を備え、
前記車両移動状況算定部は、前記静止物体認識処理部において一の静止物体に対応するものと認識した複数の電磁波反射部位のうち自車両の最至近位置にあるものの相対速度に基づいて自車両の移動状況を算定することを特徴とする車両移動状況検出装置。
【請求項2】
前記密集状態識別処理部は、空間位置が相互に自車両の全長に相当する間隔以内に接近した密集状態にある複数の電磁波反射部位を識別することを特徴とする請求項1に記載の車両移動状況検出装置。
【請求項3】
前記車両移動状況算定部によって算定した自車両の移動速度に基づいて、周囲物体に接近する蓋然性を判定し、この蓋然性を低減するための接近回避情報を自車両の走行を制御する車両制御装置に供給する接近回避情報生成部を更に備えたことを特徴とする請求項1ないし2の何れか一項に記載の車両移動状況検出装置。
【請求項4】
前記車両移動状況算定部は、前記静止物体識別部で識別した静止物体の相対速度および方位に基づいて自車両の移動速度および移動方向を表す移動ベクトルを算出し、
前記車両移動状況算定部で算出した該移動ベクトルに基づいて、周囲物体に接近する蓋然性を判定しこの蓋然性を低減するための接近回避情報を自車両の走行を制御する車両制御装置に供給する接近回避情報生成部を更に備えたことを特徴とする請求項1ないし3の何れか一項に記載の車両移動状況検出装置。
【請求項5】
前記レーダ部を、自車両の前部および後部の側方位置から前方および後方に向かって一定の広がりを持つような各探索覆域を持つようにそれぞれ設置したことを特徴とする請求項1ないし4の何れか一項に記載の車両移動状況検出装置。
【請求項6】
自車両の前部両側部位の中間位置から前記レーダ部の探索覆域よりも遠方に向かって広がった探索覆域を持ち該探索覆域に存在する電磁波反射物体における電磁波反射部位毎に当該電磁波反射部位の距離および相対速度ならびに方位をそれぞれ検出する長距離レーダ部を更に設置し、前記静止物体識別部は、前記長距離レーダ部の各検出出力をも用いて静止物体を識別することを特徴とする請求項1ないし5の何れか一項に記載の車両移動状況検出装置。
【請求項7】
前記複数の各レーダ部は、マイクロ波帯以上の周波数帯域の電磁波を用いることを特徴とする請求項1ないし6の何れか一項に記載の車両移動状況検出装置。
【請求項8】
自車両側方の所定の探索覆域に存在する電磁波反射部位毎に当該電磁波反射部位の距離、相対速度、および、方位を含む物標情報をレーダ部で取得する物標情報取得ステップと、
前記物標情報取得ステップで取得した当該物標情報と自車速とに基づいて静止物体を識別する静止物体識別ステップと、
前記静止物体識別ステップで識別した静止物体の相対速度および方位に基づいて自車両の移動状況を算定する車両移動状況算定ステップと、
を含み、
前記静止物体識別ステップは、
前記物標情報取得ステップで取得した物標情報に基づいて当該電磁波反射部位のうちから相互に所定間隔以内に接近した密集状態にある複数の電磁波反射部位の集合を識別する密集状態識別ステップと、
前記密集状態識別ステップにおいて該密集状態にあることを識別した複数の電磁波反射部位毎にその方位に応じて補正した各相対速度が自車両の走行速度と同等であるか否かを識別する速度識別ステップと、
前記速度識別ステップによって相対速度が自車両の走行速度と同等であると識別した当該複数の電磁波反射部位の集合が一の静止物体に対応するものと認識する静止物体認識ステップと、を含み、
前記車両移動状況算定ステップは、前記静止物体認識ステップにおいて一の静止物体に対応するものと認識した複数の電磁波反射部位のうち自車両の最至近位置にあるものの相対速度に基づいて自車両の移動状況を算定する
ことを特徴とする車両移動状況検出方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2010−43960(P2010−43960A)
【公開日】平成22年2月25日(2010.2.25)
【国際特許分類】
【出願番号】特願2008−208325(P2008−208325)
【出願日】平成20年8月13日(2008.8.13)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成22年2月25日(2010.2.25)
【国際特許分類】
【出願日】平成20年8月13日(2008.8.13)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]