
車両種別判別装置
【課題】検知した車両が四輪車であるのか、二輪車であるのかを、精度よく判別することができる車両種別判別装置を提供する。
【解決手段】車両種別判別装置1が、車両検知機5から入口ゲートの手前に位置する車両を検知した旨の検知信号が入力されると、カメラ2の撮像画像を取り込む。車両種別判別装置1は、取り込んだカメラ2の撮像画像を処理し、水平方向におけるエッジラインの長さ、およびその本数を検出する。車両種別判別装置1は、水平方向におけるエッジラインの長さ、およびその本数によって、撮像されている車両が四輪車であるのか、二輪車であるのかを判別し、判別結果を発券機3に入力する。
【解決手段】車両種別判別装置1が、車両検知機5から入口ゲートの手前に位置する車両を検知した旨の検知信号が入力されると、カメラ2の撮像画像を取り込む。車両種別判別装置1は、取り込んだカメラ2の撮像画像を処理し、水平方向におけるエッジラインの長さ、およびその本数を検出する。車両種別判別装置1は、水平方向におけるエッジラインの長さ、およびその本数によって、撮像されている車両が四輪車であるのか、二輪車であるのかを判別し、判別結果を発券機3に入力する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、カメラで撮像した撮像画像を処理し、撮像されている車両が四輪車であるか、二輪車であるかを判別する車両種別判別装置に関する。
【背景技術】
【0002】
従来、四輪車と、二輪車と、が駐車できる駐車場(以下、共用駐車場と言う。)では、利用車両を四輪車と、二輪車と、で区別して管理するために、駐車場を利用する車両が、四輪車であるのか、二輪車であるのかを、駐車場の入口で判別している。また、使用にかかる料金体型を四輪車と、二輪車と、で区別している共用駐車場では、この判別結果に基づいて、入口で駐車券を発券している。
【0003】
駐車場に入る車両が、四輪車であるのか、二輪車であるのかを、判別する装置については特許文献1で提案されているものがある。この特許文献1では、駐車場の入口に、複数のセンサを車幅方向に並べ、車両を検知したセンサの個数によって、四輪車であるのか、二輪車であるのかを、判別している。言い換えれば、車両の幅を検知することにより、その車両が四輪車であるのか、二輪車であるのかを、判別している。また、この特許文献1では、四輪車と、二輪車とで、進入通路を異ならせ、四輪車専用通路に設けたセンサが車両を検知すると、四輪車であると判別し、二輪車専用通路に設けたセンサが車両を検知すると、二輪車であると判別することも提案している。
【特許文献1】特開平7−152933号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1で提案されている構成は、入口に対して、二輪車が斜めに進入したときに、二輪車の車長を車幅として検知することがあり、この二輪車を四輪車であると誤判別することがあった。また、四輪車と、二輪車とで進入通路を異ならせても、二輪車が誤って四輪車の進入通路に進入することがあり、この場合も、二輪車を四輪車であると誤判別することがある。
【0005】
この発明の目的は、検知した車両が四輪車であるのか、二輪車であるのかを、精度よく判別することができる車両種別判別装置を提供することにある。
【課題を解決するための手段】
【0006】
この発明の車両種別判別装置は、上記目的を達するために、以下のようにしている。
【0007】
エッジ画像生成手段が、撮像画像入力手段に入力されたカメラの撮像画像を処理し、エッジ画像を生成する。カメラは、四輪車であるのか、二輪車であるのかを判別する車両を正面から撮像する場所、例えば、駐車場の入口、に取り付けられる。エッジライン検出手段が、エッジ画像生成手段が生成したエッジ画像における、水平方向のエッジラインを検出する。エッジ画像の生成は、例えば公知のエッジフィルタを用い、カメラの撮像画像をこのエッジフィルタに通して生成すればよい。そして、判別手段が、エッジライン検出手段が検出した水平方向のエッジラインの長さに基づいて、撮像されている車両が四輪車であるか、二輪車であるかを判別する。通常、検出される水平方向のエッジラインの長さは、二輪車に比べて、四輪車のほうが長いことから、この水平方向のエッジラインの長さによって、撮像されている車両が四輪車であるか、二輪車であるかを精度よく判別することができる。
【0008】
また、検出される水平方向のエッジラインの本数は、二輪車に比べて、四輪車のほうが多いことから、この水平方向のエッジラインの本数も加えて、撮像されている車両が四輪車であるか、二輪車であるかを判別することにより、判別精度の一層の向上が図れる。
【0009】
また、エッジ画像生成手段については、前記撮像画像入力手段に入力された撮像画像を水平方向に平滑化した平滑化画像を生成し、この平滑化画像をエッジフィルタに通してエッジ画像を生成する、構成としてもよい。このようにすれば、エッジ成分が、より顕著にあらわれたエッジ画像を生成することができ、水平方向におけるエッジラインの検出精度の向上が図れる。
【0010】
また、エッジ画像生成手段が生成するエッジ画像は、2値化画像であってもよいし、多値画像であってもよいが、画像処理にかかる装置本体の負荷を考慮すると2値化画像とするほうが好ましい。
【0011】
また、エッジライン検出手段における水平方向のエッジラインの検出は、エッジ画像生成手段が生成したエッジ画像と、背景画像との差分画像から検出すればよい。
【0012】
さらに、四輪車は前面にナンバープレートが取り付けられており、反対に、二輪車は前面にナンバープレートが取り付けられていないことを利用し、撮像画像入力手段に入力された撮像画像にナンバープレートが撮像されているかどうかを検知するナンバープレート検知手段を設けてもよい。この場合、ナンバープレート検知手段が、ナンバープレートを検知したときには、エッジ画像生成手段によるエッジ画像の生成を中止すればよい。これにより、画像処理にかかる装置本体の負荷が一層抑えられる。また、判別手段は、ナンバープレート検知手段がナンバープレートを検知したとき、撮像されている車両が四輪車であると判別すればよい。
【発明の効果】
【0013】
この発明によれば、検知した車両が四輪車であるのか、二輪車であるのかを、精度よく判別することができる。
【発明を実施するための最良の形態】
【0014】
以下、この発明の実施形態である車両種別判別装置について説明する。
【0015】
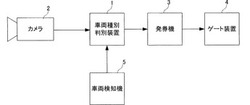
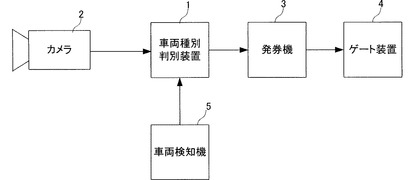
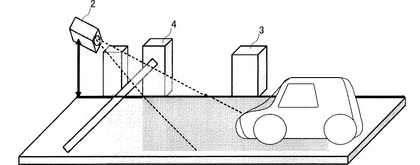
図1は、この発明の実施形態である車両種別判別装置を適用した駐車場管理システムの概略の構成を示す図である。この駐車場管理システムは、車両種別判別装置1と、カメラ2と、発券機3と、ゲート装置4と、車両検知機5と、を備えている。この駐車場管理システムは、四輪車と、二輪車と、が駐車できる駐車場(以下、共用駐車場と言う。)の利用車両を管理するシステムである。図2は、この共用駐車場の入口付近を示す概略図である。この駐車場管理システムは、この共用駐車場の入口で、利用車両が四輪車であるか、二輪車であるかを判別する。
【0016】
カメラ2は、駐車場の入口付近を撮像エリアとし、駐車場に入る車両を略正面から撮像する向きに取り付けている。カメラ2は、1秒間に数十フレーム(例えば、30フレーム)の撮像画像を出力する。カメラ2は、車両種別判別装置1に接続している。車両種別判別装置1は、カメラ2の撮像画像を処理し、駐車場に入る車両が四輪車であるのか、二輪車であるのかを判別し、その判別結果を出力する。この判別結果は、発券機3に入力される。発券機3は、車両種別判別装置1から入力された判別結果に応じて、四輪車用、または二輪車用の駐車券を発券する。この駐車券には、車両の種別(四輪車、または二輪車)や、発券時刻(利用開始時刻に相当する。)等が記録されている。また、発券機3は、利用者(車両の運転者等)が発券した駐車券を受け取ると、その旨をゲート装置4に入力する。ゲート装置4は、駐車場の入口ゲートを一時的に開し、駐車場への車両の進入を許可する。ゲート装置4は、通常、駐車場の入口ゲートを閉している。車両検知機5は、入口ゲートの手前に位置する車両を検知するセンサ(不図示)を有している。このセンサは、入口手前の路面に埋め込んだループ検知センサであってもよいし、光学的に物体を検出する光センサであってもよい。車両検知機5は、このセンサの検知結果に基づいて、入口ゲートの手前に位置する車両の有無を示す検知信号を車両種別判別装置1に入力する。
【0017】
なお、車両種別判別装置1は、共用駐車場の入口付近に設置してもよいし、管理事務所に設置してもよい。また、共用駐車場の入口付近に設置する場合は、独立した筐体で設置してもよいし、発券機3やゲート装置4の筐体内部に組み込んでもよい。また、車両検知機5も、共用駐車場の入口付近に設置する場合は、独立した筐体で設置してもよいし、発券機3やゲート装置4の筐体内部に組み込んでもよい。
【0018】
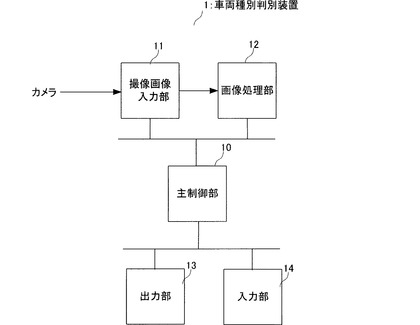
図3は、車両種別判別装置の主要部の構成を示すブロック図である。車両種別判別装置1は、主制御部10と、撮像画像入力部11と、画像処理部12と、出力部13と、入力部14と、を備えている。主制御部10は、本体各部の動作を制御する。撮像画像入力部11は、接続されているカメラ2の撮像画像が入力される。画像処理部12は、撮像画像入力部11に入力されたカメラ2の撮像画像を処理し、撮像されている車両が四輪車であるか、二輪車であるかの判別に用いる、水平方向のエッジラインの長さ、およびその本数を検出する。主制御部10は、検出された水平方向のエッジラインの長さ、およびその本数に基づいて、入力されたカメラ2の撮像画像に撮像されていた車両が四輪車であるのか、二輪車であるのかを判別する。出力部13は、主制御部10における判別結果を発券機3に対して出力する。入力部14には、車両検知機5からの車両の検知信号が入力される。
【0019】
この駐車場管理システムでは、車両種別判別装置1が、車両検知機5から入口ゲートの手前に位置する車両を検知した旨の検知信号が入力されると、カメラ2の撮像画像を取り込む。車両種別判別装置1は、取り込んだカメラ2の撮像画像を処理し、その長さが予め定めた長さよりも長い水平方向のエッジラインを検出する。言い換えれば、極端に短いエッジラインについては検出しない。そして、車両種別判別装置1は、検出した水平方向のエッジラインの長さ、およびその本数によって、撮像されている車両が四輪車であるのか、二輪車であるのかを判別し、判別結果を発券機3に入力する。
【0020】
以下、車両種別判別装置1の動作について詳細に説明する。
【0021】
図4は、車両種別判別装置1の動作を示すフローチャートである。上述したように、カメラ2は、1秒間に数十フレームの撮像画像を出力している。また、車両検知機5は、共用駐車場の入口ゲート付近に車両が位置しているかどうかを示す検知信号を車両種別判別装置1に入力している。
【0022】
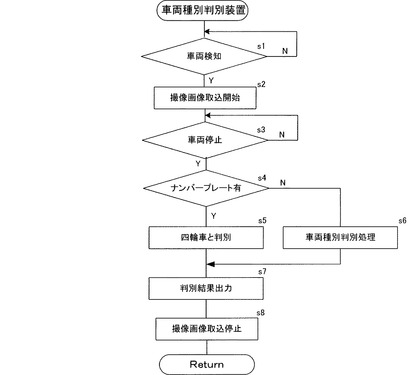
車両種別判別装置1は、車両検知機5から入口ゲートの手前に位置する車両を検知した旨の検知信号が入力部14に入力されるのを待っている(s1)。車両種別判別装置1は、車両検知機5から入口ゲートの手前に位置する車両を検知した旨の検知信号が入力されると、画像処理部12へのカメラ2の撮像画像の取り込みを開始する(s2)。このとき、ゲート装置4は、入口ゲートを閉している。車両種別判別装置1は、今回検知した車両が入口ゲート手前に停止するのを待つ(s3)。このとき、車両種別判別装置1は、s2で取り込みを開始したカメラ2の撮像画像を処理し、撮像されている車両が入口ゲート手前に停止したかどうかを判定する車両停止検知処理を行う。
【0023】
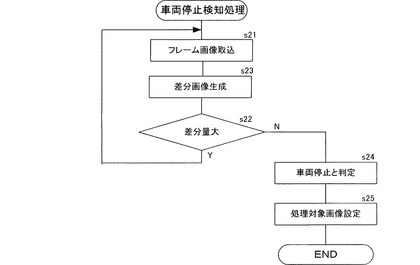
図5は、この車両停止検知処理を示すフローチャートである。車両種別判別装置1は、画像処理部12にカメラ2の撮像画像を取り込む毎に、その取り込んだフレームの撮像画像と、このフレームよりも所定フレーム(例えば、5フレーム)前の撮像画像と、の差分画像を生成し、これら2つのフレームの撮像画像間の差分量が予め定めた値よりも大きいかどうかを判定する(s21〜s23)。車両種別判別装置1は、s23で、差分量が予め定めた値よりも大きいと判定すると、s21に戻って上記処理を繰り返す。
【0024】
一方、車両種別判別装置1は、s23で、差分量が予め定めた値以下であると判定すると、今回検知した車両が入口ゲート手前に停止したと判定する(s24)。また、車両種別判別装置1は、このとき、s21で取り込んだフレームの撮像画像を、処理対象画像に設定する(s25)。上記説明から明らかなように、s25で設定された処理対象画像は、今回検知した車両が入口ゲート手前に停止している状態で撮像した撮像画像である。
【0025】
車両種別判別装置1は、s3で車両が停止したと判定すると、s25で設定した処理対象画像に、ナンバープレートが撮像されているかどうかを判定する(s4)。四輪車の前面にはナンバープレートが取り付けられているが、二輪車の前面にはナンバープレートは取り付けられていない。したがって、処理対象画像に、ナンバープレートが撮像されていれば四輪車である。一方、四輪車であっても、車高の低い車両や、ナンバープレートを車体後方に傾斜させて取り付けている車両等である場合、ナンバープレートが撮像されないことがある。すなわち、処理対象画像に、ナンバープレートが撮像されていなくても、二輪車であるとは限らない(四輪車の可能性がある。)。s4では、例えば、処理対象画像に対して、ナンバープレートの外形形状によるパターンマッチングを行い、ナンバープレートが撮像されているかどうかを判定すればよい。
【0026】
車両種別判別装置1は、s4でナンバープレートが撮像されていると判定すると、今回入口ゲート手前に停車した車両が四輪車であると判別する(s5)。また、s5で、四輪車であると判別する前に、検出したナンバープレートに表記されているナンバープレート番号の認識処理を行うようにしてもよい。この場合には、ナンバープレート番号が認識できたときに、s5で四輪車であると判別すればよい。このようにすれば、処理対象画像に、ナンバープレートが撮像されているかどうかの判別精度を高めることができる。
【0027】
車両種別判別装置1は、s4で処理対象画像にナンバープレートが撮像されていないと判定すると、以下に示す、特徴量による車両種別判別処理を行う(s6)。
【0028】
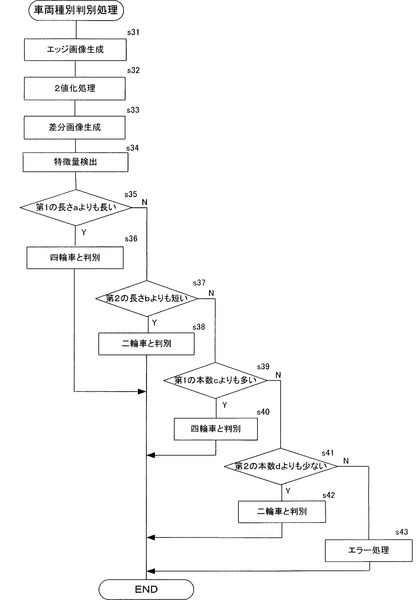
なお、s5で、四輪車であると判別する前に、検出したナンバープレートに表記されているナンバープレート番号の認識処理を行う場合には、検出したナンバープレートに表記されているナンバープレート番号が認識できなかったときにも、s6にかかる車両種別判別処理を行えばよい。図6は、この車両種別判別処理を示すフローチャートである。
【0029】
車両種別判別装置1は、s25で設定した処理対象画像に対してエッジ抽出処理を行い、エッジ画像を生成する(s31)。s31では、処理対象画像を公知のエッジフィルタに通すことにより、エッジ画像を生成する。車両種別判別装置1は、s31で生成したエッジ画像を2値化画像に変換する2値化処理を行う(s32)。車両種別判別装置1は、s32で生成した2値化画像と、背景画像(2値化画像)と、の差分画像を生成する(s33)。背景画像は、入口ゲート手前に車両が位置していないときのカメラ2の撮像画像を2値化した2値化画像である。
【0030】
車両種別判別装置1は、s33で生成した差分画像から、水平方向のエッジラインを検出し、ここで検出したエッジラインの平均長さ、および、その本数を、車両の特徴量として検出する(s34)。s34では、その長さが予め定めた長さよりも長い水平方向のエッジラインを検出する。言い換えれば、極端に短いエッジラインについてはノイズである可能性が高いので検出しない。車両種別判別装置1は、s34で得た水平方向のエッジラインの平均長さが、予め定めた第1の長さaよりも長ければ四輪車であると判別する(s35、s36)。また、s34で得た水平方向のエッジラインの平均長さが、予め定めた第2の長さb(a>b)よりも短ければ二輪車であると判別する(s37、s38)。
【0031】
また、車両種別判別装置1は、s34で得た水平方向のエッジラインの平均長さが、予め定めた第1の長さa以下で、且つ、予め定めた第2の長さb以上であれば、以下に示すs39以降の処理を行う。車両種別判別装置1は、s34で得た水平方向のエッジラインの本数が、予め定めた第1の本数cよりも多ければ四輪車であると判別する(s39、s40)。車両種別判別装置1は、s34で得た水平方向のエッジラインの本数が、予め定めた第1の本数d(c>d)よりも少なければ二輪車であると判別する(s41、s42)。
【0032】
なお、車両種別判別装置1は、s34で得た水平方向のエッジラインの平均長さが、予め定めた第1の長さa以下で、且つ第2の長さb以上であれば、車両種別判別不能と判断し、エラー処理を行う(s43)。s43では、エラーの発生を出力し、車両種別を係員等に確認させ、入力させる等のエラー処理を行えばよい。
【0033】
図4に戻って、車両種別判別装置1は、上述した処理で、今回入口ゲート手前に停止した車両について判別した車両の種別(四輪車、または二輪車)を、判別結果として出力部13から出力する(s7)。また、s2で開始した、画像処理部12へのカメラ2の撮像画像の取り込みを終了し(s8)、s1に戻る。
【0034】
発券機3は、車両種別判別装置1から入力された車両の種別(四輪車、または二輪車)に応じた駐車券を発券する。また、ゲート装置4は、発券機3から発券した駐車券を利用者が受け取った旨の入力があると、入口ゲートを一時的に開し、駐車場内への車両の進入を許可する。
【0035】
このように、この車両種別判別装置1では、四輪車は、二輪車に比べて、水平方向のエッジが多いという特徴によって車両種別を判別する構成としたので、車両種別の判別精度を十分に確保することができる。また、車両種別判別装置1は、車両が入口ゲート手前に停止しているときに撮像した撮像画像を処理対象画像に設定する。したがって、処理対象画像における車両のぶれがなく、ノイズによる誤判別が抑えられる。また、ナンバープレートが撮像されていれば、s6にかかる車両種別判別処理を行わないので、画像処理にかかる車両種別判別装置1本体の負荷が抑えられる。また、2値化画像から、水平方向のエッジラインを検出する構成としているので、水平方向のエッジラインが適正に検出できる。
【0036】
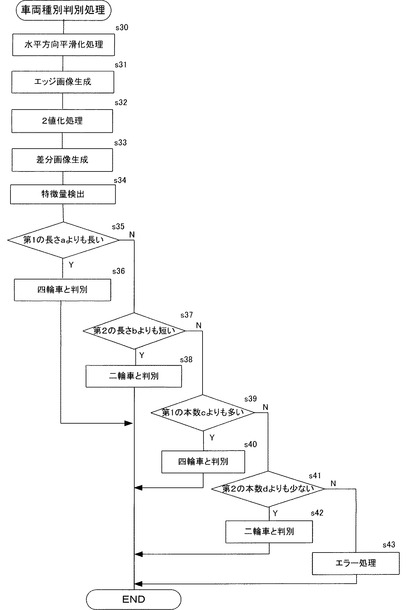
また、上記の説明では、s31において、s25で設定した処理対象画像に対してエッジ抽出処理を行い、エッジ画像を生成するとしたが、図7に示すように、s25で設定した処理対象画像に対して水平方向平滑化処理を行い(s30)、この水平方向平滑化処理を行った処理対象画像に対して、s31でエッジ抽出処理を行う構成としてもよい。
【0037】
s30にかかる水平方向平滑化処理は、処理対象画像の水平方向成分を平滑化する処理である。具体的には、処理対象画像の画素毎に、画素値を、その画素の左右両側に位置する所定数の画素(例えば25画素)の画素値の平均値(例えば、合計51画素の平均値)に置き換える処理である。これにより、処理対象画像の水平方向のエッジを強調した画像を生成することができる。
【0038】
図8(A)は、このs30にかかる水平方向平滑化処理を行っていない画像(処理対象画像)をエッジフィルタに通したエッジ画像を2値化した2値化画像であり、図8(B)は、このs30にかかる水平方向平滑化処理を行った画像をエッジフィルタに通したエッジ画像を2値化した2値化画像である。図8に示すように、このs30にかかる水平方向平滑化処理を行うことにより、水平方向のエッジを強調した2値化画像を生成することができる。
【0039】
したがって、s30にかかる水平方向平滑化処理を行うことによって、水平方向のエッジが顕著にあらわれるので、車両種別の判別精度の一層の向上が図れる。
【0040】
なお、上記の説明では、水平方向のエッジラインの平均長さを用いて、四輪車であるか、二輪車であるかを判別するとしたが、水平方向のエッジラインの最大長によって、車両種別を判別するようにしてもよい。
【0041】
また、上記実施形態では、車両検知機5を設けるとしたが、車両検知機5を設けないで、車両種別判別装置1が、カメラ2の撮像画像を処理し、背景画像との差分画像によって、入口ゲート向かって進入してきた車両を検知する構成としてもよい。
【0042】
また、車両種別判別装置1は、上述した図4に示す処理を、図9に示す処理に置き換えてもよい。具体的には、上述したs3と、s4との間に、以下に示すs51、およびs52にかかる処理を追加してもよい。s51では、四輪車と二輪車とについて、外形形状等の特徴量を学習し、それをデータ化した学習データを用い、四輪車および二輪車の学習データを、それぞれs25で設定した処理対象画像と照合し、その類似度を算出するマッチング処理を行う。この学習データは、四輪車、および二輪車について、それぞれ複数枚の撮像画像に対して、公知のPCA(Principal Component Analysis)等にかかる処理で、事前に作成しておけばよい。そして、車両種別判別装置1は、s51にかかるフレームマッチングで、車両の種別が判別できたかどうかを判定する(s52)。車両種別判別装置1は、51にかかるフレームマッチングで、車両の種別が判別できれば、上述したs7以降の処理を実行し、反対に、51にかかるフレームマッチングで、車両の種別が判別できなければ、上述したs4以降の処理を実行する。このようにすれば、車両種別の判別精度を一層向上させることができる。
【0043】
さらに、上述したs51、およびs52にかかる処理は、上述したs3と、s4との間ではなく、s4と、s6との間に挿入するようにしてもよい。
【0044】
また、車両種別判別装置1は、駐車場の入口だけでなく、駐車場の出口から出場する車両や、道路を走行している車両の種別判別等にも利用できる。
【図面の簡単な説明】
【0045】
【図1】駐車場管理システムの概略の構成を示す図である。
【図2】共用駐車場の入口付近を示す概略図である。
【図3】車両種別判別装置の主要部の構成を示すブロック図である。
【図4】車両種別判別装置の動作を示すフローチャートである。
【図5】車両停止検知処理を示すフローチャートである。
【図6】車両種別判別処理を示すフローチャートである。
【図7】別の実施形態にかかる特徴量による車両種別判別処理を示すフローチャートである。
【図8】2値化画像を示す図である。
【図9】別の車両種別判別装置の動作を示すフローチャートである。
【符号の説明】
【0046】
1−車両種別判別装置
2−カメラ
3−発券機
4−ゲート装置
5−車両検知機
10−主制御部
11−撮像画像入力部
12−画像処理部
13−出力部
14−入力部
【技術分野】
【0001】
この発明は、カメラで撮像した撮像画像を処理し、撮像されている車両が四輪車であるか、二輪車であるかを判別する車両種別判別装置に関する。
【背景技術】
【0002】
従来、四輪車と、二輪車と、が駐車できる駐車場(以下、共用駐車場と言う。)では、利用車両を四輪車と、二輪車と、で区別して管理するために、駐車場を利用する車両が、四輪車であるのか、二輪車であるのかを、駐車場の入口で判別している。また、使用にかかる料金体型を四輪車と、二輪車と、で区別している共用駐車場では、この判別結果に基づいて、入口で駐車券を発券している。
【0003】
駐車場に入る車両が、四輪車であるのか、二輪車であるのかを、判別する装置については特許文献1で提案されているものがある。この特許文献1では、駐車場の入口に、複数のセンサを車幅方向に並べ、車両を検知したセンサの個数によって、四輪車であるのか、二輪車であるのかを、判別している。言い換えれば、車両の幅を検知することにより、その車両が四輪車であるのか、二輪車であるのかを、判別している。また、この特許文献1では、四輪車と、二輪車とで、進入通路を異ならせ、四輪車専用通路に設けたセンサが車両を検知すると、四輪車であると判別し、二輪車専用通路に設けたセンサが車両を検知すると、二輪車であると判別することも提案している。
【特許文献1】特開平7−152933号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1で提案されている構成は、入口に対して、二輪車が斜めに進入したときに、二輪車の車長を車幅として検知することがあり、この二輪車を四輪車であると誤判別することがあった。また、四輪車と、二輪車とで進入通路を異ならせても、二輪車が誤って四輪車の進入通路に進入することがあり、この場合も、二輪車を四輪車であると誤判別することがある。
【0005】
この発明の目的は、検知した車両が四輪車であるのか、二輪車であるのかを、精度よく判別することができる車両種別判別装置を提供することにある。
【課題を解決するための手段】
【0006】
この発明の車両種別判別装置は、上記目的を達するために、以下のようにしている。
【0007】
エッジ画像生成手段が、撮像画像入力手段に入力されたカメラの撮像画像を処理し、エッジ画像を生成する。カメラは、四輪車であるのか、二輪車であるのかを判別する車両を正面から撮像する場所、例えば、駐車場の入口、に取り付けられる。エッジライン検出手段が、エッジ画像生成手段が生成したエッジ画像における、水平方向のエッジラインを検出する。エッジ画像の生成は、例えば公知のエッジフィルタを用い、カメラの撮像画像をこのエッジフィルタに通して生成すればよい。そして、判別手段が、エッジライン検出手段が検出した水平方向のエッジラインの長さに基づいて、撮像されている車両が四輪車であるか、二輪車であるかを判別する。通常、検出される水平方向のエッジラインの長さは、二輪車に比べて、四輪車のほうが長いことから、この水平方向のエッジラインの長さによって、撮像されている車両が四輪車であるか、二輪車であるかを精度よく判別することができる。
【0008】
また、検出される水平方向のエッジラインの本数は、二輪車に比べて、四輪車のほうが多いことから、この水平方向のエッジラインの本数も加えて、撮像されている車両が四輪車であるか、二輪車であるかを判別することにより、判別精度の一層の向上が図れる。
【0009】
また、エッジ画像生成手段については、前記撮像画像入力手段に入力された撮像画像を水平方向に平滑化した平滑化画像を生成し、この平滑化画像をエッジフィルタに通してエッジ画像を生成する、構成としてもよい。このようにすれば、エッジ成分が、より顕著にあらわれたエッジ画像を生成することができ、水平方向におけるエッジラインの検出精度の向上が図れる。
【0010】
また、エッジ画像生成手段が生成するエッジ画像は、2値化画像であってもよいし、多値画像であってもよいが、画像処理にかかる装置本体の負荷を考慮すると2値化画像とするほうが好ましい。
【0011】
また、エッジライン検出手段における水平方向のエッジラインの検出は、エッジ画像生成手段が生成したエッジ画像と、背景画像との差分画像から検出すればよい。
【0012】
さらに、四輪車は前面にナンバープレートが取り付けられており、反対に、二輪車は前面にナンバープレートが取り付けられていないことを利用し、撮像画像入力手段に入力された撮像画像にナンバープレートが撮像されているかどうかを検知するナンバープレート検知手段を設けてもよい。この場合、ナンバープレート検知手段が、ナンバープレートを検知したときには、エッジ画像生成手段によるエッジ画像の生成を中止すればよい。これにより、画像処理にかかる装置本体の負荷が一層抑えられる。また、判別手段は、ナンバープレート検知手段がナンバープレートを検知したとき、撮像されている車両が四輪車であると判別すればよい。
【発明の効果】
【0013】
この発明によれば、検知した車両が四輪車であるのか、二輪車であるのかを、精度よく判別することができる。
【発明を実施するための最良の形態】
【0014】
以下、この発明の実施形態である車両種別判別装置について説明する。
【0015】
図1は、この発明の実施形態である車両種別判別装置を適用した駐車場管理システムの概略の構成を示す図である。この駐車場管理システムは、車両種別判別装置1と、カメラ2と、発券機3と、ゲート装置4と、車両検知機5と、を備えている。この駐車場管理システムは、四輪車と、二輪車と、が駐車できる駐車場(以下、共用駐車場と言う。)の利用車両を管理するシステムである。図2は、この共用駐車場の入口付近を示す概略図である。この駐車場管理システムは、この共用駐車場の入口で、利用車両が四輪車であるか、二輪車であるかを判別する。
【0016】
カメラ2は、駐車場の入口付近を撮像エリアとし、駐車場に入る車両を略正面から撮像する向きに取り付けている。カメラ2は、1秒間に数十フレーム(例えば、30フレーム)の撮像画像を出力する。カメラ2は、車両種別判別装置1に接続している。車両種別判別装置1は、カメラ2の撮像画像を処理し、駐車場に入る車両が四輪車であるのか、二輪車であるのかを判別し、その判別結果を出力する。この判別結果は、発券機3に入力される。発券機3は、車両種別判別装置1から入力された判別結果に応じて、四輪車用、または二輪車用の駐車券を発券する。この駐車券には、車両の種別(四輪車、または二輪車)や、発券時刻(利用開始時刻に相当する。)等が記録されている。また、発券機3は、利用者(車両の運転者等)が発券した駐車券を受け取ると、その旨をゲート装置4に入力する。ゲート装置4は、駐車場の入口ゲートを一時的に開し、駐車場への車両の進入を許可する。ゲート装置4は、通常、駐車場の入口ゲートを閉している。車両検知機5は、入口ゲートの手前に位置する車両を検知するセンサ(不図示)を有している。このセンサは、入口手前の路面に埋め込んだループ検知センサであってもよいし、光学的に物体を検出する光センサであってもよい。車両検知機5は、このセンサの検知結果に基づいて、入口ゲートの手前に位置する車両の有無を示す検知信号を車両種別判別装置1に入力する。
【0017】
なお、車両種別判別装置1は、共用駐車場の入口付近に設置してもよいし、管理事務所に設置してもよい。また、共用駐車場の入口付近に設置する場合は、独立した筐体で設置してもよいし、発券機3やゲート装置4の筐体内部に組み込んでもよい。また、車両検知機5も、共用駐車場の入口付近に設置する場合は、独立した筐体で設置してもよいし、発券機3やゲート装置4の筐体内部に組み込んでもよい。
【0018】
図3は、車両種別判別装置の主要部の構成を示すブロック図である。車両種別判別装置1は、主制御部10と、撮像画像入力部11と、画像処理部12と、出力部13と、入力部14と、を備えている。主制御部10は、本体各部の動作を制御する。撮像画像入力部11は、接続されているカメラ2の撮像画像が入力される。画像処理部12は、撮像画像入力部11に入力されたカメラ2の撮像画像を処理し、撮像されている車両が四輪車であるか、二輪車であるかの判別に用いる、水平方向のエッジラインの長さ、およびその本数を検出する。主制御部10は、検出された水平方向のエッジラインの長さ、およびその本数に基づいて、入力されたカメラ2の撮像画像に撮像されていた車両が四輪車であるのか、二輪車であるのかを判別する。出力部13は、主制御部10における判別結果を発券機3に対して出力する。入力部14には、車両検知機5からの車両の検知信号が入力される。
【0019】
この駐車場管理システムでは、車両種別判別装置1が、車両検知機5から入口ゲートの手前に位置する車両を検知した旨の検知信号が入力されると、カメラ2の撮像画像を取り込む。車両種別判別装置1は、取り込んだカメラ2の撮像画像を処理し、その長さが予め定めた長さよりも長い水平方向のエッジラインを検出する。言い換えれば、極端に短いエッジラインについては検出しない。そして、車両種別判別装置1は、検出した水平方向のエッジラインの長さ、およびその本数によって、撮像されている車両が四輪車であるのか、二輪車であるのかを判別し、判別結果を発券機3に入力する。
【0020】
以下、車両種別判別装置1の動作について詳細に説明する。
【0021】
図4は、車両種別判別装置1の動作を示すフローチャートである。上述したように、カメラ2は、1秒間に数十フレームの撮像画像を出力している。また、車両検知機5は、共用駐車場の入口ゲート付近に車両が位置しているかどうかを示す検知信号を車両種別判別装置1に入力している。
【0022】
車両種別判別装置1は、車両検知機5から入口ゲートの手前に位置する車両を検知した旨の検知信号が入力部14に入力されるのを待っている(s1)。車両種別判別装置1は、車両検知機5から入口ゲートの手前に位置する車両を検知した旨の検知信号が入力されると、画像処理部12へのカメラ2の撮像画像の取り込みを開始する(s2)。このとき、ゲート装置4は、入口ゲートを閉している。車両種別判別装置1は、今回検知した車両が入口ゲート手前に停止するのを待つ(s3)。このとき、車両種別判別装置1は、s2で取り込みを開始したカメラ2の撮像画像を処理し、撮像されている車両が入口ゲート手前に停止したかどうかを判定する車両停止検知処理を行う。
【0023】
図5は、この車両停止検知処理を示すフローチャートである。車両種別判別装置1は、画像処理部12にカメラ2の撮像画像を取り込む毎に、その取り込んだフレームの撮像画像と、このフレームよりも所定フレーム(例えば、5フレーム)前の撮像画像と、の差分画像を生成し、これら2つのフレームの撮像画像間の差分量が予め定めた値よりも大きいかどうかを判定する(s21〜s23)。車両種別判別装置1は、s23で、差分量が予め定めた値よりも大きいと判定すると、s21に戻って上記処理を繰り返す。
【0024】
一方、車両種別判別装置1は、s23で、差分量が予め定めた値以下であると判定すると、今回検知した車両が入口ゲート手前に停止したと判定する(s24)。また、車両種別判別装置1は、このとき、s21で取り込んだフレームの撮像画像を、処理対象画像に設定する(s25)。上記説明から明らかなように、s25で設定された処理対象画像は、今回検知した車両が入口ゲート手前に停止している状態で撮像した撮像画像である。
【0025】
車両種別判別装置1は、s3で車両が停止したと判定すると、s25で設定した処理対象画像に、ナンバープレートが撮像されているかどうかを判定する(s4)。四輪車の前面にはナンバープレートが取り付けられているが、二輪車の前面にはナンバープレートは取り付けられていない。したがって、処理対象画像に、ナンバープレートが撮像されていれば四輪車である。一方、四輪車であっても、車高の低い車両や、ナンバープレートを車体後方に傾斜させて取り付けている車両等である場合、ナンバープレートが撮像されないことがある。すなわち、処理対象画像に、ナンバープレートが撮像されていなくても、二輪車であるとは限らない(四輪車の可能性がある。)。s4では、例えば、処理対象画像に対して、ナンバープレートの外形形状によるパターンマッチングを行い、ナンバープレートが撮像されているかどうかを判定すればよい。
【0026】
車両種別判別装置1は、s4でナンバープレートが撮像されていると判定すると、今回入口ゲート手前に停車した車両が四輪車であると判別する(s5)。また、s5で、四輪車であると判別する前に、検出したナンバープレートに表記されているナンバープレート番号の認識処理を行うようにしてもよい。この場合には、ナンバープレート番号が認識できたときに、s5で四輪車であると判別すればよい。このようにすれば、処理対象画像に、ナンバープレートが撮像されているかどうかの判別精度を高めることができる。
【0027】
車両種別判別装置1は、s4で処理対象画像にナンバープレートが撮像されていないと判定すると、以下に示す、特徴量による車両種別判別処理を行う(s6)。
【0028】
なお、s5で、四輪車であると判別する前に、検出したナンバープレートに表記されているナンバープレート番号の認識処理を行う場合には、検出したナンバープレートに表記されているナンバープレート番号が認識できなかったときにも、s6にかかる車両種別判別処理を行えばよい。図6は、この車両種別判別処理を示すフローチャートである。
【0029】
車両種別判別装置1は、s25で設定した処理対象画像に対してエッジ抽出処理を行い、エッジ画像を生成する(s31)。s31では、処理対象画像を公知のエッジフィルタに通すことにより、エッジ画像を生成する。車両種別判別装置1は、s31で生成したエッジ画像を2値化画像に変換する2値化処理を行う(s32)。車両種別判別装置1は、s32で生成した2値化画像と、背景画像(2値化画像)と、の差分画像を生成する(s33)。背景画像は、入口ゲート手前に車両が位置していないときのカメラ2の撮像画像を2値化した2値化画像である。
【0030】
車両種別判別装置1は、s33で生成した差分画像から、水平方向のエッジラインを検出し、ここで検出したエッジラインの平均長さ、および、その本数を、車両の特徴量として検出する(s34)。s34では、その長さが予め定めた長さよりも長い水平方向のエッジラインを検出する。言い換えれば、極端に短いエッジラインについてはノイズである可能性が高いので検出しない。車両種別判別装置1は、s34で得た水平方向のエッジラインの平均長さが、予め定めた第1の長さaよりも長ければ四輪車であると判別する(s35、s36)。また、s34で得た水平方向のエッジラインの平均長さが、予め定めた第2の長さb(a>b)よりも短ければ二輪車であると判別する(s37、s38)。
【0031】
また、車両種別判別装置1は、s34で得た水平方向のエッジラインの平均長さが、予め定めた第1の長さa以下で、且つ、予め定めた第2の長さb以上であれば、以下に示すs39以降の処理を行う。車両種別判別装置1は、s34で得た水平方向のエッジラインの本数が、予め定めた第1の本数cよりも多ければ四輪車であると判別する(s39、s40)。車両種別判別装置1は、s34で得た水平方向のエッジラインの本数が、予め定めた第1の本数d(c>d)よりも少なければ二輪車であると判別する(s41、s42)。
【0032】
なお、車両種別判別装置1は、s34で得た水平方向のエッジラインの平均長さが、予め定めた第1の長さa以下で、且つ第2の長さb以上であれば、車両種別判別不能と判断し、エラー処理を行う(s43)。s43では、エラーの発生を出力し、車両種別を係員等に確認させ、入力させる等のエラー処理を行えばよい。
【0033】
図4に戻って、車両種別判別装置1は、上述した処理で、今回入口ゲート手前に停止した車両について判別した車両の種別(四輪車、または二輪車)を、判別結果として出力部13から出力する(s7)。また、s2で開始した、画像処理部12へのカメラ2の撮像画像の取り込みを終了し(s8)、s1に戻る。
【0034】
発券機3は、車両種別判別装置1から入力された車両の種別(四輪車、または二輪車)に応じた駐車券を発券する。また、ゲート装置4は、発券機3から発券した駐車券を利用者が受け取った旨の入力があると、入口ゲートを一時的に開し、駐車場内への車両の進入を許可する。
【0035】
このように、この車両種別判別装置1では、四輪車は、二輪車に比べて、水平方向のエッジが多いという特徴によって車両種別を判別する構成としたので、車両種別の判別精度を十分に確保することができる。また、車両種別判別装置1は、車両が入口ゲート手前に停止しているときに撮像した撮像画像を処理対象画像に設定する。したがって、処理対象画像における車両のぶれがなく、ノイズによる誤判別が抑えられる。また、ナンバープレートが撮像されていれば、s6にかかる車両種別判別処理を行わないので、画像処理にかかる車両種別判別装置1本体の負荷が抑えられる。また、2値化画像から、水平方向のエッジラインを検出する構成としているので、水平方向のエッジラインが適正に検出できる。
【0036】
また、上記の説明では、s31において、s25で設定した処理対象画像に対してエッジ抽出処理を行い、エッジ画像を生成するとしたが、図7に示すように、s25で設定した処理対象画像に対して水平方向平滑化処理を行い(s30)、この水平方向平滑化処理を行った処理対象画像に対して、s31でエッジ抽出処理を行う構成としてもよい。
【0037】
s30にかかる水平方向平滑化処理は、処理対象画像の水平方向成分を平滑化する処理である。具体的には、処理対象画像の画素毎に、画素値を、その画素の左右両側に位置する所定数の画素(例えば25画素)の画素値の平均値(例えば、合計51画素の平均値)に置き換える処理である。これにより、処理対象画像の水平方向のエッジを強調した画像を生成することができる。
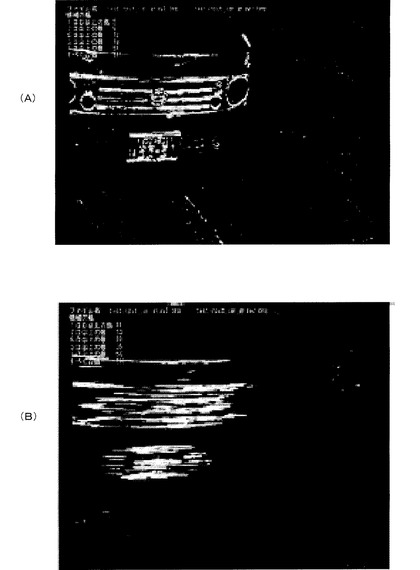
【0038】
図8(A)は、このs30にかかる水平方向平滑化処理を行っていない画像(処理対象画像)をエッジフィルタに通したエッジ画像を2値化した2値化画像であり、図8(B)は、このs30にかかる水平方向平滑化処理を行った画像をエッジフィルタに通したエッジ画像を2値化した2値化画像である。図8に示すように、このs30にかかる水平方向平滑化処理を行うことにより、水平方向のエッジを強調した2値化画像を生成することができる。
【0039】
したがって、s30にかかる水平方向平滑化処理を行うことによって、水平方向のエッジが顕著にあらわれるので、車両種別の判別精度の一層の向上が図れる。
【0040】
なお、上記の説明では、水平方向のエッジラインの平均長さを用いて、四輪車であるか、二輪車であるかを判別するとしたが、水平方向のエッジラインの最大長によって、車両種別を判別するようにしてもよい。
【0041】
また、上記実施形態では、車両検知機5を設けるとしたが、車両検知機5を設けないで、車両種別判別装置1が、カメラ2の撮像画像を処理し、背景画像との差分画像によって、入口ゲート向かって進入してきた車両を検知する構成としてもよい。
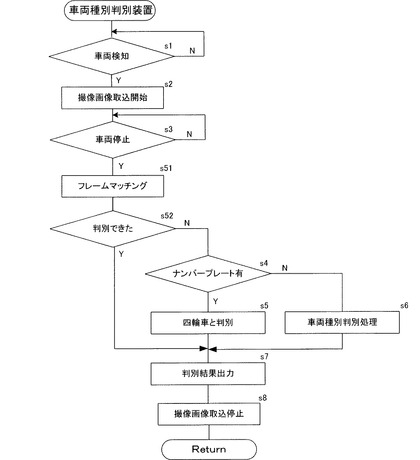
【0042】
また、車両種別判別装置1は、上述した図4に示す処理を、図9に示す処理に置き換えてもよい。具体的には、上述したs3と、s4との間に、以下に示すs51、およびs52にかかる処理を追加してもよい。s51では、四輪車と二輪車とについて、外形形状等の特徴量を学習し、それをデータ化した学習データを用い、四輪車および二輪車の学習データを、それぞれs25で設定した処理対象画像と照合し、その類似度を算出するマッチング処理を行う。この学習データは、四輪車、および二輪車について、それぞれ複数枚の撮像画像に対して、公知のPCA(Principal Component Analysis)等にかかる処理で、事前に作成しておけばよい。そして、車両種別判別装置1は、s51にかかるフレームマッチングで、車両の種別が判別できたかどうかを判定する(s52)。車両種別判別装置1は、51にかかるフレームマッチングで、車両の種別が判別できれば、上述したs7以降の処理を実行し、反対に、51にかかるフレームマッチングで、車両の種別が判別できなければ、上述したs4以降の処理を実行する。このようにすれば、車両種別の判別精度を一層向上させることができる。
【0043】
さらに、上述したs51、およびs52にかかる処理は、上述したs3と、s4との間ではなく、s4と、s6との間に挿入するようにしてもよい。
【0044】
また、車両種別判別装置1は、駐車場の入口だけでなく、駐車場の出口から出場する車両や、道路を走行している車両の種別判別等にも利用できる。
【図面の簡単な説明】
【0045】
【図1】駐車場管理システムの概略の構成を示す図である。
【図2】共用駐車場の入口付近を示す概略図である。
【図3】車両種別判別装置の主要部の構成を示すブロック図である。
【図4】車両種別判別装置の動作を示すフローチャートである。
【図5】車両停止検知処理を示すフローチャートである。
【図6】車両種別判別処理を示すフローチャートである。
【図7】別の実施形態にかかる特徴量による車両種別判別処理を示すフローチャートである。
【図8】2値化画像を示す図である。
【図9】別の車両種別判別装置の動作を示すフローチャートである。
【符号の説明】
【0046】
1−車両種別判別装置
2−カメラ
3−発券機
4−ゲート装置
5−車両検知機
10−主制御部
11−撮像画像入力部
12−画像処理部
13−出力部
14−入力部
【特許請求の範囲】
【請求項1】
カメラで撮像した撮像画像を入力する撮像画像入力手段と、
前記撮像画像入力手段に入力された撮像画像を処理し、エッジ画像を生成するエッジ画像生成手段と、
前記エッジ画像生成手段が生成したエッジ画像における、水平方向のエッジラインを検出するエッジライン検出手段と、
前記エッジライン検出手段が検出した水平方向のエッジラインの長さに基づいて、撮像されている車両が四輪車であるか、二輪車であるかを判別する判別手段と、を備えた車両種別判別装置。
【請求項2】
前記判別手段は、前記エッジライン検出手段が検出した水平方向のエッジラインの本数も加えて、撮像されている車両が四輪車であるか、二輪車であるかを判別する手段である、請求項1に記載の車両種別判別装置。
【請求項3】
前記エッジ画像生成手段は、前記撮像画像入力手段に入力された撮像画像を水平方向に平滑化した平滑化画像を生成し、この平滑化画像をエッジフィルタに通してエッジ画像を生成する手段である、請求項1、または2に記載の車両種別判別装置。
【請求項4】
前記エッジ画像生成手段が生成するエッジ画像は、2値化画像である、請求項1〜3のいずれかに記載の車両種別判別装置。
【請求項5】
前記エッジライン検出手段は、前記エッジ画像生成手段が生成したエッジ画像と、背景画像との差分画像から、水平方向のエッジラインを検出する手段である、請求項1〜4のいずれかに記載の車両種別判別装置。
【請求項6】
前記撮像画像入力手段に入力された撮像画像にナンバープレートが撮像されているかどうかを検知するナンバープレート検知手段と、
前記ナンバープレート検知手段がナンバープレートを検知したとき、前記エッジ画像生成手段によるエッジ画像の生成を中止するエッジ画像生成中止手段と、を備え、
前記判別手段は、前記ナンバープレート検知手段がナンバープレートを検知したとき、撮像されている車両が四輪車であると判別する手段である、請求項1〜5のいずれかに記載の車両種別判別装置。
【請求項1】
カメラで撮像した撮像画像を入力する撮像画像入力手段と、
前記撮像画像入力手段に入力された撮像画像を処理し、エッジ画像を生成するエッジ画像生成手段と、
前記エッジ画像生成手段が生成したエッジ画像における、水平方向のエッジラインを検出するエッジライン検出手段と、
前記エッジライン検出手段が検出した水平方向のエッジラインの長さに基づいて、撮像されている車両が四輪車であるか、二輪車であるかを判別する判別手段と、を備えた車両種別判別装置。
【請求項2】
前記判別手段は、前記エッジライン検出手段が検出した水平方向のエッジラインの本数も加えて、撮像されている車両が四輪車であるか、二輪車であるかを判別する手段である、請求項1に記載の車両種別判別装置。
【請求項3】
前記エッジ画像生成手段は、前記撮像画像入力手段に入力された撮像画像を水平方向に平滑化した平滑化画像を生成し、この平滑化画像をエッジフィルタに通してエッジ画像を生成する手段である、請求項1、または2に記載の車両種別判別装置。
【請求項4】
前記エッジ画像生成手段が生成するエッジ画像は、2値化画像である、請求項1〜3のいずれかに記載の車両種別判別装置。
【請求項5】
前記エッジライン検出手段は、前記エッジ画像生成手段が生成したエッジ画像と、背景画像との差分画像から、水平方向のエッジラインを検出する手段である、請求項1〜4のいずれかに記載の車両種別判別装置。
【請求項6】
前記撮像画像入力手段に入力された撮像画像にナンバープレートが撮像されているかどうかを検知するナンバープレート検知手段と、
前記ナンバープレート検知手段がナンバープレートを検知したとき、前記エッジ画像生成手段によるエッジ画像の生成を中止するエッジ画像生成中止手段と、を備え、
前記判別手段は、前記ナンバープレート検知手段がナンバープレートを検知したとき、撮像されている車両が四輪車であると判別する手段である、請求項1〜5のいずれかに記載の車両種別判別装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2010−134821(P2010−134821A)
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願番号】特願2008−311923(P2008−311923)
【出願日】平成20年12月8日(2008.12.8)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成20年9月3日 社団法人電子情報通信学会発行の「電子情報通信学会技術研究報告(信学技報Vol.108 No.200)」に発表
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願日】平成20年12月8日(2008.12.8)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成20年9月3日 社団法人電子情報通信学会発行の「電子情報通信学会技術研究報告(信学技報Vol.108 No.200)」に発表
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]