
車両経路判定方法およびナビゲーション装置
【課題】走行中の道路を迅速かつ精度よく特定できる車両経路判定方法およびナビゲーション装置を提供すること。
【解決手段】自車両の現在位置がランプ区間に入っていると、そのランプ区間の分岐道路の分岐経路傾斜属性101と、前記分岐道路が分岐している高速道路本線の本線経路傾斜属性102とを記憶部13から読み出す。そして、分岐経路傾斜属性101、本線経路傾斜属性102および判定される傾斜属性103に対応して判定結果104が設定されたテーブルTBLを、傾斜算出部6で判定された傾斜属性103と、記憶部13から読み出した分岐経路傾斜属性101と本線経路傾斜属性102とをもとに参照し、現在走行中の道路が分岐道路(ランプ)であるか本線側であるかの判定結果104を取得する。
【解決手段】自車両の現在位置がランプ区間に入っていると、そのランプ区間の分岐道路の分岐経路傾斜属性101と、前記分岐道路が分岐している高速道路本線の本線経路傾斜属性102とを記憶部13から読み出す。そして、分岐経路傾斜属性101、本線経路傾斜属性102および判定される傾斜属性103に対応して判定結果104が設定されたテーブルTBLを、傾斜算出部6で判定された傾斜属性103と、記憶部13から読み出した分岐経路傾斜属性101と本線経路傾斜属性102とをもとに参照し、現在走行中の道路が分岐道路(ランプ)であるか本線側であるかの判定結果104を取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば高速道路の本線から車両出口ゲートへの分岐経路のように水平方向の変位が小さい道路について、どちらの道路を走行しているかを安価かつ高い精度で判定できる車両経路判定方法およびナビゲーション装置に関する。
【背景技術】
【0002】
従来のナビゲーション装置では、例えば高速道路の本線から車両出口ゲートへ分岐する道路については、車両が高速道路の本線を通過しているのか、車両出口ゲートへ分岐する道路に入ったのかを正確に判定できない場合があった。
特に都市部における高速道路では、本線から車両出口ゲートへ分岐する分岐道路の水平方向の変位は小さく、本線と車両出口ゲートへ分岐する分岐道路とが垂直方向に重なって並走している構造、あるいは接近した構造が多く採用されている。
このような、水平方向の変位が小さく、本線と本線から分岐する分岐道路とが垂直方向に重なって並走している構造、あるいは本線と本線から分岐する分岐道路とが接近した構造の道路では、どちらの道路を走行しているかを迅速に判定する必要がある。
これは、経路案内中の車両の現在位置が、案内経路から外れた場合に迅速かつ正確に案内経路の修正を行う必要があるからである。
このような水平方向の変位が小さく、本線と本線から分岐する分岐道路とが垂直方向に重なって並走している構造であるときの走行中の車両の現在位置を推測するものとして次のようなものがある。
すなわち、方位センサ、車速センサおよび垂直変位センサから得られるデータから車両の垂直方向の変位、つまり垂直変位量を含む3次元の走行軌跡および推測現在位置を算出し、これら算出した3次元の走行軌跡および推測現在位置を走行軌跡記憶部へ記憶する。
そして、道路特定部にて、走行軌跡記憶部に記憶されている車両の3次元の走行軌跡および推測現在位置と、地図データ記憶部に記憶された地図データとの整合度合から車両が走行してきた道路を特定するものが提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−194558号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従って従来の車両経路判定方法およびナビゲーション装置は、垂直変位データが記憶されている場合、車両の3次元走行軌跡の垂直変位データと道路データに対応する垂直変位データとが最も整合する道路を現在走行中の道路と判定する。
また、垂直変位データが記憶されていない場合、走行後に車両が特定可能位置に現在位置しているか否かを判定する。そして、特定可能位置にいると判定した場合には、その地点を基準に逆方向の走行軌跡と逆方向に接続した道路ネットワーク形状とを比較し最も整合する道路ネットワークの組み合わせから走行してきた道路を特定する。
このため、現在走行中の道路の特定に処理時間を要すことになり、即座に判断しなければならないような状況に迅速に対応できないという課題があった。
本発明は、このような事情に鑑みてなされたものであり、走行中の道路を迅速かつ精度よく特定できる車両経路判定方法およびナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上述の目的を達成するため、本発明にかかる車両経路判定方法は、複数のGPS衛星からの信号をもとに、受信位置の緯度、経度を含む現在位置情報を算出する現在位置算出ステップと、本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有しているランプ区間を規定するランプ区間規定情報と、前記ランプ区間における前記本線経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す本線経路傾斜属性と、前記ランプ区間における前記分岐経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す分岐経路傾斜属性とを、ランプ区間ごとに記憶部に記憶する記憶ステップと、前記現在位置算出ステップで算出した現在位置情報をもとに自車両の現在位置が前記ランプ区間に入っているか否かを判定するランプ区間判定ステップと、前記自車両の進行方向の前後の傾き変化であるピッチ角速度情報をセンサが検出するピッチ角速度情報検出ステップと、前記ピッチ角速度情報検出ステップにおいて前記センサにより検出した前記ピッチ角速度情報を所定のサンプリング周期でサンプリングし積算することで前記自車両が走行している経路が上り勾配であるか下り勾配であるか、あるいは水平であるかの傾斜属性を判定する傾斜属性判定ステップと、前記傾斜属性判定ステップにより判定する前記自車両が走行している前記傾斜属性と、前記ランプ区間における前記本線経路傾斜属性と、前記ランプ区間における分岐経路傾斜属性とに対応させて、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果をテーブルとして規定するテーブル規定ステップと、前記ランプ区間判定ステップにより判定したランプ区間について前記記憶部から読み出された本線経路についての本線経路傾斜属性と、前記ランプ区間について前記記憶部から読み出された前記分岐経路についての分岐経路傾斜属性と、前記傾斜属性判定ステップにより判定した前記自車両が走行している前記傾斜属性とをもとに前記テーブルを参照し、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を取得する車両経路判定ステップとを備えたことを特徴とする。
【0006】
また、本発明にかかるナビゲーション装置は、複数のGPS衛星からの信号をもとに、受信位置の緯度、経度を含む現在位置情報を算出するGPS処理部と、本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有しているランプ区間を規定するランプ区間規定情報と、前記ランプ区間における前記本線経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す本線経路傾斜属性と、前記ランプ区間における前記分岐経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す分岐経路傾斜属性とを、ランプ区間ごとに記憶した記憶部と、前記GPS処理部が算出した現在位置情報をもとに自車両の現在位置が前記ランプ区間に入っているか否かを判定するランプ区間判定手段と、前記自車両の進行方向の前後の傾き変化であるピッチ角速度情報を出力するセンサと、前記センサから出力される前記ピッチ角速度情報を所定のサンプリング周期で検出し移動平均することで前記自車両が走行している経路が上り勾配であるか下り勾配であるか、あるいは水平であるかの傾斜属性を判定する傾斜属性判定手段と、前記傾斜属性判定手段により判定する前記自車両が走行している前記傾斜属性と、前記ランプ区間における前記本線経路傾斜属性と、前記ランプ区間における分岐経路傾斜属性とに対応させて、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を規定したテーブルと、前記ランプ区間判定手段により判定されたランプ区間における前記記憶部から読み出された本線経路についての本線傾斜属性と、前記ランプ区間における前記記憶部から読み出された前記分岐経路についてのランプ傾斜属性と、前記傾斜属性判定手段により判定した前記自車両が走行している前記傾斜属性とをもとに前記テーブルを参照し、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を取得する車両経路判定手段とを備えたことを特徴とする。
【発明の効果】
【0007】
本発明によれば、現在走行中の道路を迅速かつ精度よく特定できる車両経路判定方法およびナビゲーション装置を提供できる効果がある。
【図面の簡単な説明】
【0008】
【図1】本発明の第1の実施の形態である車両経路判定方法が適用される車両経路判定装置の構成を示す機能ブロック図である。
【図2】本発明の第1の実施の形態であるナビゲーション装置における座標系を示す説明図である。
【図3】本発明の第1の実施の形態であるナビゲーション装置の動作を示すフローチャートである。
【図4】本発明の第1の実施の形態であるナビゲーション装置におけるテーブルTBLの内容を示す説明図である。
【発明を実施するための形態】
【0009】
(第1の実施の形態)
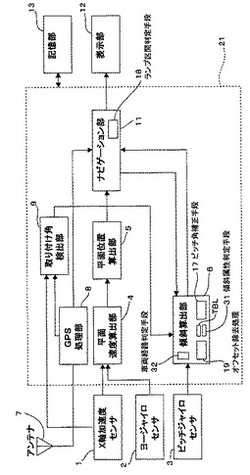
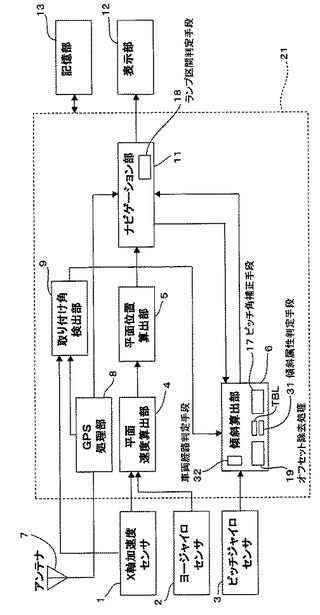
図1は、本発明の第1の実施の形態である車両経路判定方法が適用されるナビゲーション装置の構成を示す機能ブロック図である。
【0010】
このナビゲーション装置30は、X軸加速度センサ1、ヨージャイロセンサ2、ピッチジャイロセンサ3、平面速度算出部4、平面位置算出部5、傾斜算出部6、アンテナ7、GPS処理部8、取り付け角検出部9、ナビゲーション部11を含んで構成されている。また、ナビゲーション装置30は記憶部13および表示部12をさらに備えている。
それらX軸加速度センサ1などの構成部品、構成部材は筐体32に収容されている。
【0011】
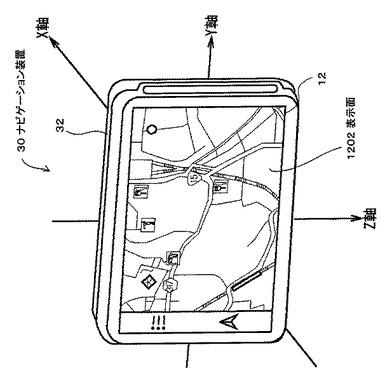
図2に示すように、筐体32は、長方形板状を呈している。
表示部12は、その表示面1202が筐体32の厚さ方向の一方の面のほぼ全域を占めるように設けられている。
筐体32は、表示面1202が運転者から見やすい角度となるように、図示しない取り付け部材を介して車室内の適宜箇所、例えばダッシュボードに取着されている。
表示部12は、表示面1202に、現在位置と、その現在位置を含む地図データ、経路案内マーク、操作用アイコンなどを表示するたとえば液晶ディスプレイで構成されている。
ここで、表示面1202と直交する軸をX軸とすると、このX軸と車両が直進する方向とがなす角(偏差角)をナビゲーション装置30の取り付け角という。
また、X軸に直交して水平方向に延在する軸をY軸とし、X軸およびY軸の双方と直交して鉛直方向に延在する軸をZ軸とする。
【0012】
X軸加速度センサ1は、このナビゲーション装置30が移動したときの進行方向の加速度情報を検出するセンサである。
【0013】
ヨージャイロセンサ2は、車両の進行方向の方位角情報を検出するジャイロスコープを利用したセンサである。
【0014】
ピッチジャイロセンサ3は、車両の進行方向の前後の傾き変化であるピッチ角速度を検出するジャイロスコープを利用したセンサである。
【0015】
平面速度算出部4は、X軸加速度センサ1により検出した進行方向の加速度情報と、ヨージャイロセンサ2により検出した車両の進行方向の方位角情報とをもとに、図2のX軸とY軸とにより規定されるX−Y平面上の車両速度を算出する。
【0016】
平面位置算出部5は、平面速度算出部4により算出したX−Y平面上の車両速度をもとに車両の地図データ上の現在位置を算出する。
【0017】
傾斜算出部6は、ピッチジャイロセンサ3により検出した車両の前後の傾きであるピッチ角速度情報をもとに車両の傾斜角、つまり車両が走行している道路の傾斜角を算出する。
【0018】
このナビゲーション装置30は、表示部12の表示面1202が運転席の運転者の方向を向くように所望の取り付け角を有して運転席のダッシュボード上に取り付けられる。このため、ナビゲーション装置30のX軸と車両の直進する方向とは一致しないことが多い。
【0019】
従って、前記取り付け角によりピッチジャイロセンサ3で検出したピッチ角速度を補正する必要が生じる。
【0020】
このため傾斜算出部6では、後述する取り付け角検出部9により検出されたこのナビゲーション装置30の取り付け角を用いてピッチジャイロ3で検出されたピッチ角速度の補正を行う。
すなわち、自車両が直進する方向を基準としたときのナビゲーション装置30本体の取り付け角に応じて、前記ピッチジャイロ3で検出したピッチ角速度を補正するピッチ角補正手段17を備えている。
【0021】
また、傾斜算出部6は、ピッチジャイロセンサ3により検出したピッチ角速度のオフセットを除去するオフセット除去回路19を備えている。
【0022】
この傾斜算出部6におけるピッチ角の算出は、所定のサンプリング周期で検出したピッチジャイロセンサ3から出力される車両の前後の傾きであるピッチ角速度信号を移動平均、あるいは積算することで算出する。
【0023】
そして、この移動平均値あるいは積算値が一定の閾値を超えると道路の勾配が上り勾配“UP”、あるいは下り勾配“DOWN”と判定する。
【0024】
なお、道路の勾配が上り勾配“UP”と判定するときの前記一定の閾値は上り閾値、道路の勾配が下り勾配“DOWN”と判定するときの一定の閾値は下り閾値とする。
【0025】
また、オフセット除去回路19におけるピッチ角速度のオフセットの除去は次のようにして行われる。
【0026】
通常、車両が水平な状態にあるときにはピッチジャイロセンサ3により検出される車両の前後の傾きであるピッチ角速度情報は0°(degree)である。
【0027】
しかしながら、ピッチジャイロセンサ3を含むセンサ回路の諸特性により、車両が水平な状態にあるときでもピッチ角速度情報は0°にならず、オフセットが出力されている場合があり、さらにこのオフセット量は周囲温度に応じて変動する。
【0028】
このようなピッチジャイロセンサ3を含むセンサ回路のオフセットの温度ドリフトについては、あらかじめピッチジャイロセンサ3を含むセンサ回路の温度特性を特定することで、特定した温度特性とは逆特性の温度補償回路を設けることで補償する。
【0029】
また、ピッチジャイロセンサ3により検出したピッチ角速度情報には、車両が上り勾配の道路を走行しているか下り勾配の道路を走行しているかに応じてピッチジャイロセンサ3に作用する重力加速度の変化によるオフセットが含まれる。
【0030】
つまり、車両が上り勾配の道路を走行しているときにはピッチジャイロセンサ3に作用する重力加速度は大きくなり、また車両が下り勾配の道路を走行しているときにはピッチジャイロセンサ3に作用する重力加速度は小さくなる。
【0031】
このため、車両が上り勾配の道路を走行しているときにはピッチジャイロセンサ3に作用する重力加速度の増加によるオフセットがピッチ角速度情報に含まれる。
【0032】
また、車両が下り勾配の道路を走行しているときにはピッチジャイロセンサ3に作用する重力加速度の減少によるオフセットがピッチ角速度情報に含まれる。
【0033】
従って、比較的長い期間、たとえば過去数十秒間のピッチジャイロセンサ3の測定値から学習した値を学習オフセット量とする。
これにより、短い期間に出現するピッチジャイロセンサ3に作用する重力加速度の変化によるオフセット量と、ピッチジャイロセンサ3を含むセンサ回路の諸特性により生じているオフセット量とを軽減させる。
【0034】
そして、前記学習オフセット量を除去したピッチジャイロセンサ3により検出したピッチ角速度情報をもとに、ランプのリンク区間進入後、あるいはランプへの分岐道路の分岐点付近において、サンプリング周期で車両の前後の傾きであるピッチ角速度信号を積算する。
【0035】
また、傾斜算出部6はテーブルTBLと傾斜属性判定手段31と車両経路判定手段32とを備えている。
傾斜属性判定手段31は、ピッチジャイロセンサ3から出力される前記ピッチ角情報を所定のサンプリング周期で検出し移動平均することで前記自車両が走行している経路が上り勾配であるか下り勾配であるか、あるいは水平であるかの傾斜属性103を判定する。
車両経路判定手段32は、自車両が高速道路のランプ区間を走行していると、ランプ区間ごとに設定されている分岐経路傾斜属性101と本線経路傾斜属性102、さらに傾斜属性判定手段31により判定した傾斜属性103をもとにテーブルTBLを参照する。
そして、車両の現在走行中の道路が高速道路の本線であるか、あるいは他の道路、出入口ゲートへの分岐道路(ランプ)であるかを高精度で特定する。
アンテナ7は、上空にある複数のGPS衛星からの信号を受信する。
GPS処理部8は、アンテナ7により受信した複数のGPS衛星からの信号をもとに、受信位置の緯度、経度を含む現在位置情報を算出する。
【0036】
取り付け角検出部9は、ナビゲーション装置30の取り付け角を検出し、傾斜算出部6へ出力する。
【0037】
この取り付け角は、GPS衛星から受信した信号をもとに算出した車両の速度情報と、前記取り付け角を有して取り付けられたナビゲーション装置30のX軸加速度センサ1により検出した加速度情報から算出した速度情報との違いから算出する。
【0038】
ナビゲーション部11は、前記GPS処理部8が算出した現在位置情報をもとに自車両の現在位置が高速道路のランプ区間に入っているか否かを判定するランプ区間判定手段18を備えている。
ここで、ランプ区間とは、本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有している部分をいう。
ナビゲーション部11は、GPS処理部8により算出した受信位置の緯度、経度を含む現在位置情報、あるいは平面位置算出部5により算出した車両の地図データ上の現在位置情報をもとに、地図データ上へ自車両の現在位置を表示する。
【0039】
図4は、この実施の形態のナビゲーション装置30の傾斜算出部6が有するテーブルTBLの内容を示す説明図である。
【0040】
高速道路には所定の個所に一般道路から高速道路へ進入するための入口ゲート、あるいは高速道路から一般道路へ下りるための出口ゲートが設けられている。
これら入口ゲート、出口ゲートを通過するためには高速道路の本線から分岐している分岐道路を走行する。また、他の系統の高速道路へ移るための分岐道路が設けられている場合もある。
【0041】
高速道路本線からこのような分岐道路へ進路変更するときの分岐点では、高速道路本線の走行速度が高速であることから、高速道路本線から分岐道路へ移る際のハンドル操作角が小さくて済むように、高速道路本線に対する分岐道路への進入角は狭く設計されている。
【0042】
また、これら高速道路本線から分岐する分岐道路は、高速道路本線から分岐した後は垂直方向に大きな勾配で上昇あるいは下降する構造が多く採用されている。
【0043】
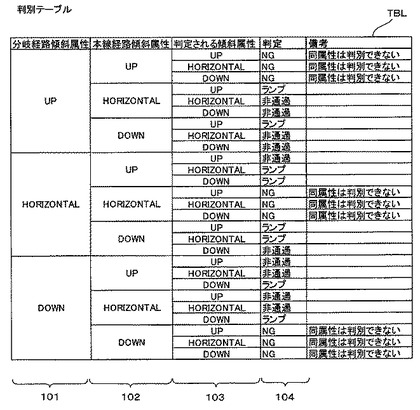
このため、テーブルTBLには、地図データ上の各分岐道路(ランプ)ごとに、その分岐道路の勾配が上り勾配“UP”であるか下り勾配“DOWN”であるか、あるいは水平“HORIZONTAL”であるかを示す分岐経路傾斜属性101が設定されている。
さらに、その分岐道路が分岐している分岐点付近の高速道路本線の勾配が上り勾配“UP”であるか下り勾配“DOWN”であるか、あるいは水平“HORIZONTAL”であるかを示す本線経路傾斜属性102が設定される。
【0044】
これら分岐経路傾斜属性101と本線経路傾斜属性102は、地図データ上の高速道路の各分岐道路(ランプ)ごとに、それぞれ対応する傾斜属性としてあらかじめ明確になっている情報である。
これら分岐経路傾斜属性101と本線経路傾斜属性102は地図データにおける高速道路の各分岐道路(ランプ)ごとに、それぞれ対応して記憶部13に記憶されている。
【0045】
さらにこれら分岐経路傾斜属性101と本線経路傾斜属性102とに対応させて、走行中の道路勾配について判定される傾斜属性103が参照データとしてテーブルTBLに設定される。
この走行中の道路勾配について判定される傾斜属性103は、ピッチジャイロセンサ3により検出されるピッチ角速度情報をもとに傾斜算出部6で積算されて算出される車両の傾斜角から得られる走行中の道路勾配についての属性情報である。
【0046】
すなわち、分岐経路傾斜属性101と本線経路傾斜属性102とに対応させて、傾斜属性103が参照データとしてテーブルTBLに設定されている。
【0047】
さらに、これら分岐経路傾斜属性101と本線経路傾斜属性102と傾斜属性103とに対応させて一意に決定される現在走行中の道路についての判定結果104が設定されている。
【0048】
この判定結果104は、NG(判定不能)、ランプ(分岐道路上を走行)、非通過(本線側を走行)の3種類である。
【0049】
分岐経路傾斜属性101と本線経路傾斜属性102と傾斜属性103との組み合わせは、図4に示すように27種類に限定される。
このため、分岐経路傾斜属性101と本線経路傾斜属性102と傾斜属性103との組み合わせから、テーブルTBLを参照することで現在走行中の道路についての判定結果104が即座に得られることになる。
【0050】
ここで、テーブルTBLとして分岐経路傾斜属性101、本線経路傾斜属性102および傾斜算出部6において判定される傾斜属性103に対応して設定された判定結果104について説明する。
【0051】
図4において、分岐経路傾斜属性101が上り勾配“UP”であり、本線経路傾斜属性102が同様に上り勾配“UP”である場合、現在走行中の道路についての判定結果104は得られずNGとなる。
この場合、判定された傾斜属性103が上り勾配“UP”、水平“HORIZONTAL”、下り勾配“DOWN”のいずれであっても現在走行中の道路についての判定結果104は得られずNGとなる。
【0052】
これは分岐経路傾斜属性101と本線経路傾斜属性102とが共に上り勾配“UP”であるためであり、勾配の属性で判定していることから判定不能となる。
【0053】
次に、分岐経路傾斜属性101が上り勾配“UP”であり、本線経路傾斜属性102が水平“HORIZONTAL”である場合、判定された傾斜属性103が上り勾配“UP”のときには判定結果104はランプ(分岐道路上を走行)となる。
【0054】
また、判定された傾斜属性103が水平“HORIZONTAL”の場合と下り勾配“DOWN”の場合には、判定結果104は共に非通過(本線側を走行)となる。
【0055】
次に、分岐経路傾斜属性101が上り勾配“UP”であり、本線経路傾斜属性102が下り勾配“DOWN”である場合、判定された傾斜属性103が上り勾配“UP”のときには判定結果104はランプ(分岐道路上を走行)となる。
【0056】
また、判定された傾斜属性103が水平“HORIZONTAL”の場合と下り勾配“DOWN”の場合には、判定結果104は共に非通過(本線側を走行)となる。
【0057】
次に、分岐経路傾斜属性101が水平“HORIZONTAL”であり、本線経路傾斜属性102が上り勾配“UP”である場合、判定された傾斜属性103が上り勾配“UP”のときには非通過(本線側を走行)となる。
【0058】
また、判定された傾斜属性103が水平“HORIZONTAL”と下り勾配“DOWN”の場合、共に、判定結果104はランプ(分岐道路上を走行)となる。
【0059】
次に、分岐経路傾斜属性101と本線経路傾斜属性102とが共に水平“HORIZONTAL”である場合、現在走行中の道路についての判定結果104は得られずNGとなる。
この場合、判定された傾斜属性103が上り勾配“UP”、水平“HORIZONTAL”、下り勾配“DOWN”のいずれであっても現在走行中の道路についての判定結果104は得られずNGとなる。
【0060】
これは分岐経路傾斜属性101と本線経路傾斜属性102とが共に水平“HORIZONTAL”であるため、勾配の属性で判定していることから判定不能となる。
【0061】
次に、分岐経路傾斜属性101が水平“HORIZONTAL”であり、本線経路傾斜属性102が下り勾配“DOWN”であり、判定された傾斜属性103が上り勾配“UP”あるいは水平“HORIZONTAL”のとき、判定結果104は共にランプ(分岐道路上を走行)となる。
【0062】
次に、分岐経路傾斜属性101が水平“HORIZONTAL”であり、本線経路傾斜属性102が下り勾配“DOWN”である場合、判定された傾斜属性103が下り勾配“DOWN”のときには、判定結果104は非通過(本線側を走行)となる。
【0063】
次に、分岐経路傾斜属性101が下り勾配“DOWN”であり、本線経路傾斜属性102が上り勾配“UP”である場合、判定された傾斜属性103が上り勾配“UP”あるいは水平“HORIZONTAL”のときには、判定結果104は共に非通過(本線側を走行)となる。
【0064】
また、判定された傾斜属性103が下り勾配“DOWN”のときには、判定結果104はランプ(分岐道路上を走行)となる。
【0065】
次に、分岐経路傾斜属性101が下り勾配“DOWN”であり、本線経路傾斜属性102が水平“HORIZONTAL”である場合、判定された傾斜属性103が上り勾配“UP”あるいは水平“HORIZONTAL”のときには、判定結果104は共に非通過(本線側を走行)となる。
【0066】
また、判定された傾斜属性103が下り勾配“DOWN”のときには、判定結果104はランプ(分岐道路上を走行)となる。
【0067】
次に、分岐経路傾斜属性101と本線経路傾斜属性102とが共に下り勾配“DOWN”である場合、現在走行中の道路についての判定結果104は得られずNGとなる。この場合、判定された傾斜属性103が上り勾配“UP”、水平“HORIZONTAL”、下り勾配“DOWN”のいずれであっても現在走行中の道路についての判定結果104は得られずNGとなる。
【0068】
これは分岐経路傾斜属性101と本線経路傾斜属性102とが共に下り勾配“DOWN”であるため、勾配の属性で判定していることから判定不能となる。
【0069】
記憶部13はRAM,ROM、ハードディスクなどを含むメモリにより構成されている。この記憶部13には、地図データが記憶されている。
【0070】
また、記憶部13には、前記地図データの高速道路における各分岐道路(ランプ)ごとの分岐経路傾斜属性101と、前記分岐道路と並行する高速道路本線の本線経路傾斜属性102とが各分岐道路(ランプ)ごとに、それぞれ対応して記憶されている。
【0071】
また、記憶部13には、自車両の現在位置が地図データ上で高速道路の分岐道路(ランプ)近傍エリアであるランプ区間に入っているか否かを判定するためのランプ区間規定データが各分岐道路(ランプ)ごとに記憶されている。
【0072】
なお、図1に示す符号21は、平面速度算出部4、平面位置算出部5、傾斜算出部6、GPS処理部8、取り付け角検出部9およびナビゲーション部11を含むデータ処理部を示す。
【0073】
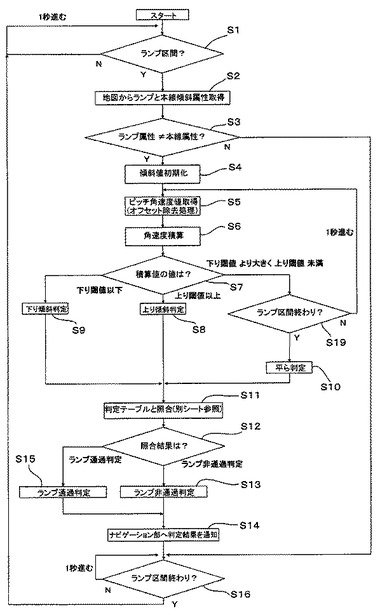
図3は、この実施の形態のナビゲーション装置30の動作を示すフローチャートである。
なお、この実施の形態のナビゲーション装置30の動作としては、複数のGPS衛星からの信号をもとに、GPS処理部8が、受信位置の緯度、経度を含む現在位置情報を算出する現在位置算出ステップを備える。
また、ランプ区間規定情報と、本線経路傾斜属性と、分岐経路傾斜属性とを、ランプ区間ごとに記憶部13に記憶する記憶ステップとを備える。
ここで、ランプ区間規定情報とは、本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有しているランプ区間を規定する情報である。
本線経路傾斜属性とは、ランプ区間における本線経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す属性である。
分岐経路傾斜属性とは、ランプ区間における分岐経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す属性である。
また、現在位置算出ステップで算出した現在位置情報をもとに自車両の現在位置がランプ区間に入っているか否かをナビゲーション部11のランプ区間判定手段18が判定するランプ区間判定ステップを備える。
【0074】
また、自車両の進行方向の前後の傾きであるピッチ角速度情報をピッチジャイロ3が検出するピッチ角情報検出ステップを備える。
また、ピッチ角情報検出ステップにおいてピッチジャイロ3により検出したピッチ角速度情報を所定のサンプリング周期でサンプリングし移動平均あるいは積算することで自車両が走行している経路の傾斜属性を傾斜属性判定手段31が判定する傾斜属性判定ステップを備える。
また、傾斜属性103と、ランプ区間における本線経路傾斜属性102と、ランプ区間における分岐経路傾斜属性101とに対応させて、自車両が走行している経路の経路判定結果をテーブルTBLとして規定するテーブル規定ステップを備える。
また、本線経路傾斜属性102と、分岐経路傾斜属性101と、傾斜属性103とをもとにテーブルを参照し、自車両の経路判定結果を車両経路判定手段32が取得する車両経路判定ステップとを備える。
ここで、本線経路傾斜属性102および分岐経路傾斜属性101は、ランプ区間について記憶部13から読み出され、傾斜属性103は、傾斜属性判定ステップにより判定されるものである。
以下、図3に示すフローチャートを参照し動作を説明する。
【0075】
先ず、走行中の車両がランプ区間近傍にあるか否かを判定する(ステップS1)。
このランプ区間近傍にあるか否かを判定は次のように行う。
すなわち、記憶部13に記憶されている地図データと前記ランプ区間規定データと自車両の現在位置とから自車両の現在位置が地図データ上で高速道路のランプ区間規定データにより規定される範囲(すなわちランプ区間)に入っているか否かを判定することで行う。
【0076】
自車両の現在位置がランプ区間に入っていると判定すると、そのランプ区間の分岐道路(ランプ)の分岐経路傾斜属性101と、前記ランプ区間の前記分岐道路が分岐している高速道路本線の本線経路傾斜属性102とを記憶部13から読み出す(ステップS2)。
【0077】
これら分岐経路傾斜属性101および本線経路傾斜属性102の傾斜属性は、上り勾配、下り勾配を判定するための上り閾値、下り閾値を基準に設定されている。
つまり前記上り閾値を上回る勾配を有している場合に上り勾配“UP”、前記下り閾値を下回る勾配を有している場合は下り勾配“DOWN”と設定されている。また、前記上り閾値と前記下り閾値の間に入る勾配を有している場合は水平“HORIZONTAL”などのように分岐道路(ランプ)ごとにあらかじめ設定されている。
【0078】
そして、分岐経路傾斜属性101と本線経路傾斜属性102とが同じ傾斜属性を有しているか否かを判定する(ステップS3)。
そして、分岐経路傾斜属性101と本線経路傾斜属性102とが同じ傾斜属性を有している場合、分岐道路(ランプ)と高速道路本線との経路判定は不可能としてステップS16へ進み、そのランプ区間を通過する。
【0079】
一方、分岐経路傾斜属性101と本線経路傾斜属性102とが異なる傾斜属性を有している場合にはピッチジャイロ3により検出される傾斜値について初期化を行う(ステップS4)。
【0080】
この傾斜値についての初期化は、ピッチジャイロ3により検出された傾斜値を格納するレジスタの初期化を含む。
【0081】
また、短い期間に出現するピッチジャイロセンサ3に作用する重力加速度の変化によるオフセット量の変動による影響を軽減させるため過去数十秒間のピッチジャイロセンサ3の測定値から学習した学習オフセット値をオフセット量に設定する初期化を含む。
【0082】
傾斜値について初期化処理が終了すると、ピッチジャイロ3により検出されるピッチ角速度をサンプリング周期ごとに取得する(ステップS5)。
【0083】
このとき、取得したピッチ角速度については前記学習した学習オフセット値をオフセット量として傾斜算出部6ではオフセット除去回路19によりオフセット除去処理を行う。
【0084】
また傾斜算出部6では、取り付け角検出部9により検出されたこのナビゲーション装置30の取り付け角を用いてピッチジャイロ3で検出されたピッチ角速度の補正をピッチ角補正手段17により行う。
そして、サンプリング周期ごとに取得したピッチ角速度を一定の走行距離を基準として
移動平均あるいは積算し車両の前後方向の傾斜角を算出する(ステップS6)。
【0085】
この結果、移動平均あるいは積算した車両の前後方向の傾斜角が下り勾配判定用の下り閾値を下回っていると判定すると、傾斜属性判定手段31は自車両が現在走行中の道路は下り勾配であると判定する(ステップS9)。
【0086】
また、前記積算した車両の前後方向の傾斜角が上り勾配判定用の上り閾値を上回っている判定すると、傾斜属性判定手段31は自車両が現在走行中の道路は上り勾配であると判定する(ステップS8)。
【0087】
また、前記積算した車両の前後方向の傾斜角が前記上り閾値と前記下り閾値の間に入っている、つまり下り閾値より大きく上り閾値より小さいと判定すると、ランプ区間を通過したか否かを判定する(ステップS19)。
そして、ランプ区間を通過していないと判定するとステップS5へ戻り、ステップS5、ステップS6、ステップS7の処理へ進む。
ステップS7において前記積算した車両の前後方向の傾斜角が前記上り閾値と前記下り閾値の間に入っている状態が継続しており、続くステップS19においてランプ区間を通過したと判定する。この場合、傾斜属性判定手段31は自車両が現在走行中の道路は水平と判定する。
つまりランプ区間を通過するまで前記積算した傾斜角が前記上り閾値と前記下り閾値の間に入っている状態が継続していると、自車両が現在走行中の道路は水平(平ら)であると判定する(ステップS10)。
【0088】
このようにして、傾斜算出部6の傾斜属性判定手段31において現在走行中の道路について“下り勾配”、“上り勾配”、あるいは“水平”の傾斜属性103を判定する。
続いて、傾斜算出部6の車両経路判定手段32は、ステップS2において取得したランプ勾配属性情報101と本線勾配属性情報102と、傾斜属性判定手段31において判定された傾斜属性103とをもとに、テーブルTBLを参照する(ステップS11)。
そして、現在走行中の道路が分岐道路であるか、本線側であるかを判定する(ステップS12、ステップS13、ステップS15)。
【0089】
例えば、自車両の現在位置がランプ区間に入っているとき、ステップS2で取得した現在走行中の道路の地図データ上の分岐経路傾斜属性101が上り勾配“UP”、本線経路傾斜属性102が水平“HORIZONTAL”であるとする。
このときステップS7で判定された判定された傾斜属性103が上り勾配“UP”であった場合、テーブルTBLを参照すると、現在走行中の道路は分岐道路(ランプ)であると判定する。
【0090】
あるいは、ステップS7で判定された傾斜属性103が水平“HORIZONTAL”であった場合、テーブルTBLを参照すると、現在走行中の道路は“非通過”つまり本線側を走行していると判定する。
【0091】
あるいは、ステップS7で判定された傾斜属性103が下り勾配“DOWN”であった場合、テーブルTBLを参照すると、現在走行中の道路は“非通過”つまり本線側を走行していると判定する。
【0092】
このように、自車両が現在走行中の道路が分岐道路(ランプ)であるか本線側であるかを傾斜属性から判定するため、データ処理が迅速に行われ、判定結果が即座に得られる。
【0093】
車両経路判定手段32において現在走行中の道路が分岐道路(ランプ)であるか本線側であるかの判定結果が得られると、傾斜算出部6からナビゲーション部11へ前記判定結果が通知される(ステップS14)。ナビゲーション部11は前記判定結果をもとに表示部12へ自車両の現在位置を表示する。
【0094】
この場合、ナビゲーション部11では、傾斜算出部6から通知された判定結果をもとに、現在走行中の自車両の現在位置を地図データ上の分岐道路(ランプ)上あるいは高速道路の本線上へ表示出力する。
そして、前記得られた判定結果は自車両の現在位置がランプ区間を外れるまで保持される(ステップS16)。
【0095】
本実施の形態によれば、自車両の現在位置がランプ区間に入っていると、そのランプ区間の分岐道路(ランプ)の分岐経路傾斜属性101と、前記分岐道路が分岐している高速道路本線の本線経路傾斜属性102とを記憶部13から読み出す。
そして、分岐経路傾斜属性101、本線経路傾斜属性102および判定される傾斜属性103に対応して判定結果104が設定されたテーブルTBLを、傾斜属性103と、分岐経路傾斜属性101と、本線経路傾斜属性102とをもとに参照する。そして、現在走行中の道路が分岐道路(ランプ)であるか本線側であるかの判定結果104を取得する。
【0096】
このように傾斜属性によりテーブルTBLを利用して在走行中の道路が分岐道路(ランプ)であるか本線側であるかを判定するため、データ処理が迅速に行われ、判定結果が即座に得られる車両経路判定方法および装置を提供できる効果がある。
また、並走する経路などにおいて案内経路とは異なる経路を走行したときの案内経路の修正を迅速に行うことができる車両経路判定方法および装置を提供できる効果がある。
【符号の説明】
【0097】
1……X軸加速度センサ(加速度センサ)、2……ヨージャイロセンサ(方位センサ)、3……ピッチジャイロセンサ(センサ)、4……平面速度算出部、5……平面位置算出部、6……傾斜算出部、8……GPS処理部、9……取り付け角検出部、11……ナビゲーション部、13……記憶部、17……ピッチ角補正手段、18……ランプ区間判定手段、19……オフセット除去回路、31……傾斜属性判定手段、32……車両経路判定手段、TBL……テーブル。
【技術分野】
【0001】
本発明は、例えば高速道路の本線から車両出口ゲートへの分岐経路のように水平方向の変位が小さい道路について、どちらの道路を走行しているかを安価かつ高い精度で判定できる車両経路判定方法およびナビゲーション装置に関する。
【背景技術】
【0002】
従来のナビゲーション装置では、例えば高速道路の本線から車両出口ゲートへ分岐する道路については、車両が高速道路の本線を通過しているのか、車両出口ゲートへ分岐する道路に入ったのかを正確に判定できない場合があった。
特に都市部における高速道路では、本線から車両出口ゲートへ分岐する分岐道路の水平方向の変位は小さく、本線と車両出口ゲートへ分岐する分岐道路とが垂直方向に重なって並走している構造、あるいは接近した構造が多く採用されている。
このような、水平方向の変位が小さく、本線と本線から分岐する分岐道路とが垂直方向に重なって並走している構造、あるいは本線と本線から分岐する分岐道路とが接近した構造の道路では、どちらの道路を走行しているかを迅速に判定する必要がある。
これは、経路案内中の車両の現在位置が、案内経路から外れた場合に迅速かつ正確に案内経路の修正を行う必要があるからである。
このような水平方向の変位が小さく、本線と本線から分岐する分岐道路とが垂直方向に重なって並走している構造であるときの走行中の車両の現在位置を推測するものとして次のようなものがある。
すなわち、方位センサ、車速センサおよび垂直変位センサから得られるデータから車両の垂直方向の変位、つまり垂直変位量を含む3次元の走行軌跡および推測現在位置を算出し、これら算出した3次元の走行軌跡および推測現在位置を走行軌跡記憶部へ記憶する。
そして、道路特定部にて、走行軌跡記憶部に記憶されている車両の3次元の走行軌跡および推測現在位置と、地図データ記憶部に記憶された地図データとの整合度合から車両が走行してきた道路を特定するものが提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2003−194558号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従って従来の車両経路判定方法およびナビゲーション装置は、垂直変位データが記憶されている場合、車両の3次元走行軌跡の垂直変位データと道路データに対応する垂直変位データとが最も整合する道路を現在走行中の道路と判定する。
また、垂直変位データが記憶されていない場合、走行後に車両が特定可能位置に現在位置しているか否かを判定する。そして、特定可能位置にいると判定した場合には、その地点を基準に逆方向の走行軌跡と逆方向に接続した道路ネットワーク形状とを比較し最も整合する道路ネットワークの組み合わせから走行してきた道路を特定する。
このため、現在走行中の道路の特定に処理時間を要すことになり、即座に判断しなければならないような状況に迅速に対応できないという課題があった。
本発明は、このような事情に鑑みてなされたものであり、走行中の道路を迅速かつ精度よく特定できる車両経路判定方法およびナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上述の目的を達成するため、本発明にかかる車両経路判定方法は、複数のGPS衛星からの信号をもとに、受信位置の緯度、経度を含む現在位置情報を算出する現在位置算出ステップと、本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有しているランプ区間を規定するランプ区間規定情報と、前記ランプ区間における前記本線経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す本線経路傾斜属性と、前記ランプ区間における前記分岐経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す分岐経路傾斜属性とを、ランプ区間ごとに記憶部に記憶する記憶ステップと、前記現在位置算出ステップで算出した現在位置情報をもとに自車両の現在位置が前記ランプ区間に入っているか否かを判定するランプ区間判定ステップと、前記自車両の進行方向の前後の傾き変化であるピッチ角速度情報をセンサが検出するピッチ角速度情報検出ステップと、前記ピッチ角速度情報検出ステップにおいて前記センサにより検出した前記ピッチ角速度情報を所定のサンプリング周期でサンプリングし積算することで前記自車両が走行している経路が上り勾配であるか下り勾配であるか、あるいは水平であるかの傾斜属性を判定する傾斜属性判定ステップと、前記傾斜属性判定ステップにより判定する前記自車両が走行している前記傾斜属性と、前記ランプ区間における前記本線経路傾斜属性と、前記ランプ区間における分岐経路傾斜属性とに対応させて、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果をテーブルとして規定するテーブル規定ステップと、前記ランプ区間判定ステップにより判定したランプ区間について前記記憶部から読み出された本線経路についての本線経路傾斜属性と、前記ランプ区間について前記記憶部から読み出された前記分岐経路についての分岐経路傾斜属性と、前記傾斜属性判定ステップにより判定した前記自車両が走行している前記傾斜属性とをもとに前記テーブルを参照し、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を取得する車両経路判定ステップとを備えたことを特徴とする。
【0006】
また、本発明にかかるナビゲーション装置は、複数のGPS衛星からの信号をもとに、受信位置の緯度、経度を含む現在位置情報を算出するGPS処理部と、本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有しているランプ区間を規定するランプ区間規定情報と、前記ランプ区間における前記本線経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す本線経路傾斜属性と、前記ランプ区間における前記分岐経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す分岐経路傾斜属性とを、ランプ区間ごとに記憶した記憶部と、前記GPS処理部が算出した現在位置情報をもとに自車両の現在位置が前記ランプ区間に入っているか否かを判定するランプ区間判定手段と、前記自車両の進行方向の前後の傾き変化であるピッチ角速度情報を出力するセンサと、前記センサから出力される前記ピッチ角速度情報を所定のサンプリング周期で検出し移動平均することで前記自車両が走行している経路が上り勾配であるか下り勾配であるか、あるいは水平であるかの傾斜属性を判定する傾斜属性判定手段と、前記傾斜属性判定手段により判定する前記自車両が走行している前記傾斜属性と、前記ランプ区間における前記本線経路傾斜属性と、前記ランプ区間における分岐経路傾斜属性とに対応させて、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を規定したテーブルと、前記ランプ区間判定手段により判定されたランプ区間における前記記憶部から読み出された本線経路についての本線傾斜属性と、前記ランプ区間における前記記憶部から読み出された前記分岐経路についてのランプ傾斜属性と、前記傾斜属性判定手段により判定した前記自車両が走行している前記傾斜属性とをもとに前記テーブルを参照し、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を取得する車両経路判定手段とを備えたことを特徴とする。
【発明の効果】
【0007】
本発明によれば、現在走行中の道路を迅速かつ精度よく特定できる車両経路判定方法およびナビゲーション装置を提供できる効果がある。
【図面の簡単な説明】
【0008】
【図1】本発明の第1の実施の形態である車両経路判定方法が適用される車両経路判定装置の構成を示す機能ブロック図である。
【図2】本発明の第1の実施の形態であるナビゲーション装置における座標系を示す説明図である。
【図3】本発明の第1の実施の形態であるナビゲーション装置の動作を示すフローチャートである。
【図4】本発明の第1の実施の形態であるナビゲーション装置におけるテーブルTBLの内容を示す説明図である。
【発明を実施するための形態】
【0009】
(第1の実施の形態)
図1は、本発明の第1の実施の形態である車両経路判定方法が適用されるナビゲーション装置の構成を示す機能ブロック図である。
【0010】
このナビゲーション装置30は、X軸加速度センサ1、ヨージャイロセンサ2、ピッチジャイロセンサ3、平面速度算出部4、平面位置算出部5、傾斜算出部6、アンテナ7、GPS処理部8、取り付け角検出部9、ナビゲーション部11を含んで構成されている。また、ナビゲーション装置30は記憶部13および表示部12をさらに備えている。
それらX軸加速度センサ1などの構成部品、構成部材は筐体32に収容されている。
【0011】
図2に示すように、筐体32は、長方形板状を呈している。
表示部12は、その表示面1202が筐体32の厚さ方向の一方の面のほぼ全域を占めるように設けられている。
筐体32は、表示面1202が運転者から見やすい角度となるように、図示しない取り付け部材を介して車室内の適宜箇所、例えばダッシュボードに取着されている。
表示部12は、表示面1202に、現在位置と、その現在位置を含む地図データ、経路案内マーク、操作用アイコンなどを表示するたとえば液晶ディスプレイで構成されている。
ここで、表示面1202と直交する軸をX軸とすると、このX軸と車両が直進する方向とがなす角(偏差角)をナビゲーション装置30の取り付け角という。
また、X軸に直交して水平方向に延在する軸をY軸とし、X軸およびY軸の双方と直交して鉛直方向に延在する軸をZ軸とする。
【0012】
X軸加速度センサ1は、このナビゲーション装置30が移動したときの進行方向の加速度情報を検出するセンサである。
【0013】
ヨージャイロセンサ2は、車両の進行方向の方位角情報を検出するジャイロスコープを利用したセンサである。
【0014】
ピッチジャイロセンサ3は、車両の進行方向の前後の傾き変化であるピッチ角速度を検出するジャイロスコープを利用したセンサである。
【0015】
平面速度算出部4は、X軸加速度センサ1により検出した進行方向の加速度情報と、ヨージャイロセンサ2により検出した車両の進行方向の方位角情報とをもとに、図2のX軸とY軸とにより規定されるX−Y平面上の車両速度を算出する。
【0016】
平面位置算出部5は、平面速度算出部4により算出したX−Y平面上の車両速度をもとに車両の地図データ上の現在位置を算出する。
【0017】
傾斜算出部6は、ピッチジャイロセンサ3により検出した車両の前後の傾きであるピッチ角速度情報をもとに車両の傾斜角、つまり車両が走行している道路の傾斜角を算出する。
【0018】
このナビゲーション装置30は、表示部12の表示面1202が運転席の運転者の方向を向くように所望の取り付け角を有して運転席のダッシュボード上に取り付けられる。このため、ナビゲーション装置30のX軸と車両の直進する方向とは一致しないことが多い。
【0019】
従って、前記取り付け角によりピッチジャイロセンサ3で検出したピッチ角速度を補正する必要が生じる。
【0020】
このため傾斜算出部6では、後述する取り付け角検出部9により検出されたこのナビゲーション装置30の取り付け角を用いてピッチジャイロ3で検出されたピッチ角速度の補正を行う。
すなわち、自車両が直進する方向を基準としたときのナビゲーション装置30本体の取り付け角に応じて、前記ピッチジャイロ3で検出したピッチ角速度を補正するピッチ角補正手段17を備えている。
【0021】
また、傾斜算出部6は、ピッチジャイロセンサ3により検出したピッチ角速度のオフセットを除去するオフセット除去回路19を備えている。
【0022】
この傾斜算出部6におけるピッチ角の算出は、所定のサンプリング周期で検出したピッチジャイロセンサ3から出力される車両の前後の傾きであるピッチ角速度信号を移動平均、あるいは積算することで算出する。
【0023】
そして、この移動平均値あるいは積算値が一定の閾値を超えると道路の勾配が上り勾配“UP”、あるいは下り勾配“DOWN”と判定する。
【0024】
なお、道路の勾配が上り勾配“UP”と判定するときの前記一定の閾値は上り閾値、道路の勾配が下り勾配“DOWN”と判定するときの一定の閾値は下り閾値とする。
【0025】
また、オフセット除去回路19におけるピッチ角速度のオフセットの除去は次のようにして行われる。
【0026】
通常、車両が水平な状態にあるときにはピッチジャイロセンサ3により検出される車両の前後の傾きであるピッチ角速度情報は0°(degree)である。
【0027】
しかしながら、ピッチジャイロセンサ3を含むセンサ回路の諸特性により、車両が水平な状態にあるときでもピッチ角速度情報は0°にならず、オフセットが出力されている場合があり、さらにこのオフセット量は周囲温度に応じて変動する。
【0028】
このようなピッチジャイロセンサ3を含むセンサ回路のオフセットの温度ドリフトについては、あらかじめピッチジャイロセンサ3を含むセンサ回路の温度特性を特定することで、特定した温度特性とは逆特性の温度補償回路を設けることで補償する。
【0029】
また、ピッチジャイロセンサ3により検出したピッチ角速度情報には、車両が上り勾配の道路を走行しているか下り勾配の道路を走行しているかに応じてピッチジャイロセンサ3に作用する重力加速度の変化によるオフセットが含まれる。
【0030】
つまり、車両が上り勾配の道路を走行しているときにはピッチジャイロセンサ3に作用する重力加速度は大きくなり、また車両が下り勾配の道路を走行しているときにはピッチジャイロセンサ3に作用する重力加速度は小さくなる。
【0031】
このため、車両が上り勾配の道路を走行しているときにはピッチジャイロセンサ3に作用する重力加速度の増加によるオフセットがピッチ角速度情報に含まれる。
【0032】
また、車両が下り勾配の道路を走行しているときにはピッチジャイロセンサ3に作用する重力加速度の減少によるオフセットがピッチ角速度情報に含まれる。
【0033】
従って、比較的長い期間、たとえば過去数十秒間のピッチジャイロセンサ3の測定値から学習した値を学習オフセット量とする。
これにより、短い期間に出現するピッチジャイロセンサ3に作用する重力加速度の変化によるオフセット量と、ピッチジャイロセンサ3を含むセンサ回路の諸特性により生じているオフセット量とを軽減させる。
【0034】
そして、前記学習オフセット量を除去したピッチジャイロセンサ3により検出したピッチ角速度情報をもとに、ランプのリンク区間進入後、あるいはランプへの分岐道路の分岐点付近において、サンプリング周期で車両の前後の傾きであるピッチ角速度信号を積算する。
【0035】
また、傾斜算出部6はテーブルTBLと傾斜属性判定手段31と車両経路判定手段32とを備えている。
傾斜属性判定手段31は、ピッチジャイロセンサ3から出力される前記ピッチ角情報を所定のサンプリング周期で検出し移動平均することで前記自車両が走行している経路が上り勾配であるか下り勾配であるか、あるいは水平であるかの傾斜属性103を判定する。
車両経路判定手段32は、自車両が高速道路のランプ区間を走行していると、ランプ区間ごとに設定されている分岐経路傾斜属性101と本線経路傾斜属性102、さらに傾斜属性判定手段31により判定した傾斜属性103をもとにテーブルTBLを参照する。
そして、車両の現在走行中の道路が高速道路の本線であるか、あるいは他の道路、出入口ゲートへの分岐道路(ランプ)であるかを高精度で特定する。
アンテナ7は、上空にある複数のGPS衛星からの信号を受信する。
GPS処理部8は、アンテナ7により受信した複数のGPS衛星からの信号をもとに、受信位置の緯度、経度を含む現在位置情報を算出する。
【0036】
取り付け角検出部9は、ナビゲーション装置30の取り付け角を検出し、傾斜算出部6へ出力する。
【0037】
この取り付け角は、GPS衛星から受信した信号をもとに算出した車両の速度情報と、前記取り付け角を有して取り付けられたナビゲーション装置30のX軸加速度センサ1により検出した加速度情報から算出した速度情報との違いから算出する。
【0038】
ナビゲーション部11は、前記GPS処理部8が算出した現在位置情報をもとに自車両の現在位置が高速道路のランプ区間に入っているか否かを判定するランプ区間判定手段18を備えている。
ここで、ランプ区間とは、本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有している部分をいう。
ナビゲーション部11は、GPS処理部8により算出した受信位置の緯度、経度を含む現在位置情報、あるいは平面位置算出部5により算出した車両の地図データ上の現在位置情報をもとに、地図データ上へ自車両の現在位置を表示する。
【0039】
図4は、この実施の形態のナビゲーション装置30の傾斜算出部6が有するテーブルTBLの内容を示す説明図である。
【0040】
高速道路には所定の個所に一般道路から高速道路へ進入するための入口ゲート、あるいは高速道路から一般道路へ下りるための出口ゲートが設けられている。
これら入口ゲート、出口ゲートを通過するためには高速道路の本線から分岐している分岐道路を走行する。また、他の系統の高速道路へ移るための分岐道路が設けられている場合もある。
【0041】
高速道路本線からこのような分岐道路へ進路変更するときの分岐点では、高速道路本線の走行速度が高速であることから、高速道路本線から分岐道路へ移る際のハンドル操作角が小さくて済むように、高速道路本線に対する分岐道路への進入角は狭く設計されている。
【0042】
また、これら高速道路本線から分岐する分岐道路は、高速道路本線から分岐した後は垂直方向に大きな勾配で上昇あるいは下降する構造が多く採用されている。
【0043】
このため、テーブルTBLには、地図データ上の各分岐道路(ランプ)ごとに、その分岐道路の勾配が上り勾配“UP”であるか下り勾配“DOWN”であるか、あるいは水平“HORIZONTAL”であるかを示す分岐経路傾斜属性101が設定されている。
さらに、その分岐道路が分岐している分岐点付近の高速道路本線の勾配が上り勾配“UP”であるか下り勾配“DOWN”であるか、あるいは水平“HORIZONTAL”であるかを示す本線経路傾斜属性102が設定される。
【0044】
これら分岐経路傾斜属性101と本線経路傾斜属性102は、地図データ上の高速道路の各分岐道路(ランプ)ごとに、それぞれ対応する傾斜属性としてあらかじめ明確になっている情報である。
これら分岐経路傾斜属性101と本線経路傾斜属性102は地図データにおける高速道路の各分岐道路(ランプ)ごとに、それぞれ対応して記憶部13に記憶されている。
【0045】
さらにこれら分岐経路傾斜属性101と本線経路傾斜属性102とに対応させて、走行中の道路勾配について判定される傾斜属性103が参照データとしてテーブルTBLに設定される。
この走行中の道路勾配について判定される傾斜属性103は、ピッチジャイロセンサ3により検出されるピッチ角速度情報をもとに傾斜算出部6で積算されて算出される車両の傾斜角から得られる走行中の道路勾配についての属性情報である。
【0046】
すなわち、分岐経路傾斜属性101と本線経路傾斜属性102とに対応させて、傾斜属性103が参照データとしてテーブルTBLに設定されている。
【0047】
さらに、これら分岐経路傾斜属性101と本線経路傾斜属性102と傾斜属性103とに対応させて一意に決定される現在走行中の道路についての判定結果104が設定されている。
【0048】
この判定結果104は、NG(判定不能)、ランプ(分岐道路上を走行)、非通過(本線側を走行)の3種類である。
【0049】
分岐経路傾斜属性101と本線経路傾斜属性102と傾斜属性103との組み合わせは、図4に示すように27種類に限定される。
このため、分岐経路傾斜属性101と本線経路傾斜属性102と傾斜属性103との組み合わせから、テーブルTBLを参照することで現在走行中の道路についての判定結果104が即座に得られることになる。
【0050】
ここで、テーブルTBLとして分岐経路傾斜属性101、本線経路傾斜属性102および傾斜算出部6において判定される傾斜属性103に対応して設定された判定結果104について説明する。
【0051】
図4において、分岐経路傾斜属性101が上り勾配“UP”であり、本線経路傾斜属性102が同様に上り勾配“UP”である場合、現在走行中の道路についての判定結果104は得られずNGとなる。
この場合、判定された傾斜属性103が上り勾配“UP”、水平“HORIZONTAL”、下り勾配“DOWN”のいずれであっても現在走行中の道路についての判定結果104は得られずNGとなる。
【0052】
これは分岐経路傾斜属性101と本線経路傾斜属性102とが共に上り勾配“UP”であるためであり、勾配の属性で判定していることから判定不能となる。
【0053】
次に、分岐経路傾斜属性101が上り勾配“UP”であり、本線経路傾斜属性102が水平“HORIZONTAL”である場合、判定された傾斜属性103が上り勾配“UP”のときには判定結果104はランプ(分岐道路上を走行)となる。
【0054】
また、判定された傾斜属性103が水平“HORIZONTAL”の場合と下り勾配“DOWN”の場合には、判定結果104は共に非通過(本線側を走行)となる。
【0055】
次に、分岐経路傾斜属性101が上り勾配“UP”であり、本線経路傾斜属性102が下り勾配“DOWN”である場合、判定された傾斜属性103が上り勾配“UP”のときには判定結果104はランプ(分岐道路上を走行)となる。
【0056】
また、判定された傾斜属性103が水平“HORIZONTAL”の場合と下り勾配“DOWN”の場合には、判定結果104は共に非通過(本線側を走行)となる。
【0057】
次に、分岐経路傾斜属性101が水平“HORIZONTAL”であり、本線経路傾斜属性102が上り勾配“UP”である場合、判定された傾斜属性103が上り勾配“UP”のときには非通過(本線側を走行)となる。
【0058】
また、判定された傾斜属性103が水平“HORIZONTAL”と下り勾配“DOWN”の場合、共に、判定結果104はランプ(分岐道路上を走行)となる。
【0059】
次に、分岐経路傾斜属性101と本線経路傾斜属性102とが共に水平“HORIZONTAL”である場合、現在走行中の道路についての判定結果104は得られずNGとなる。
この場合、判定された傾斜属性103が上り勾配“UP”、水平“HORIZONTAL”、下り勾配“DOWN”のいずれであっても現在走行中の道路についての判定結果104は得られずNGとなる。
【0060】
これは分岐経路傾斜属性101と本線経路傾斜属性102とが共に水平“HORIZONTAL”であるため、勾配の属性で判定していることから判定不能となる。
【0061】
次に、分岐経路傾斜属性101が水平“HORIZONTAL”であり、本線経路傾斜属性102が下り勾配“DOWN”であり、判定された傾斜属性103が上り勾配“UP”あるいは水平“HORIZONTAL”のとき、判定結果104は共にランプ(分岐道路上を走行)となる。
【0062】
次に、分岐経路傾斜属性101が水平“HORIZONTAL”であり、本線経路傾斜属性102が下り勾配“DOWN”である場合、判定された傾斜属性103が下り勾配“DOWN”のときには、判定結果104は非通過(本線側を走行)となる。
【0063】
次に、分岐経路傾斜属性101が下り勾配“DOWN”であり、本線経路傾斜属性102が上り勾配“UP”である場合、判定された傾斜属性103が上り勾配“UP”あるいは水平“HORIZONTAL”のときには、判定結果104は共に非通過(本線側を走行)となる。
【0064】
また、判定された傾斜属性103が下り勾配“DOWN”のときには、判定結果104はランプ(分岐道路上を走行)となる。
【0065】
次に、分岐経路傾斜属性101が下り勾配“DOWN”であり、本線経路傾斜属性102が水平“HORIZONTAL”である場合、判定された傾斜属性103が上り勾配“UP”あるいは水平“HORIZONTAL”のときには、判定結果104は共に非通過(本線側を走行)となる。
【0066】
また、判定された傾斜属性103が下り勾配“DOWN”のときには、判定結果104はランプ(分岐道路上を走行)となる。
【0067】
次に、分岐経路傾斜属性101と本線経路傾斜属性102とが共に下り勾配“DOWN”である場合、現在走行中の道路についての判定結果104は得られずNGとなる。この場合、判定された傾斜属性103が上り勾配“UP”、水平“HORIZONTAL”、下り勾配“DOWN”のいずれであっても現在走行中の道路についての判定結果104は得られずNGとなる。
【0068】
これは分岐経路傾斜属性101と本線経路傾斜属性102とが共に下り勾配“DOWN”であるため、勾配の属性で判定していることから判定不能となる。
【0069】
記憶部13はRAM,ROM、ハードディスクなどを含むメモリにより構成されている。この記憶部13には、地図データが記憶されている。
【0070】
また、記憶部13には、前記地図データの高速道路における各分岐道路(ランプ)ごとの分岐経路傾斜属性101と、前記分岐道路と並行する高速道路本線の本線経路傾斜属性102とが各分岐道路(ランプ)ごとに、それぞれ対応して記憶されている。
【0071】
また、記憶部13には、自車両の現在位置が地図データ上で高速道路の分岐道路(ランプ)近傍エリアであるランプ区間に入っているか否かを判定するためのランプ区間規定データが各分岐道路(ランプ)ごとに記憶されている。
【0072】
なお、図1に示す符号21は、平面速度算出部4、平面位置算出部5、傾斜算出部6、GPS処理部8、取り付け角検出部9およびナビゲーション部11を含むデータ処理部を示す。
【0073】
図3は、この実施の形態のナビゲーション装置30の動作を示すフローチャートである。
なお、この実施の形態のナビゲーション装置30の動作としては、複数のGPS衛星からの信号をもとに、GPS処理部8が、受信位置の緯度、経度を含む現在位置情報を算出する現在位置算出ステップを備える。
また、ランプ区間規定情報と、本線経路傾斜属性と、分岐経路傾斜属性とを、ランプ区間ごとに記憶部13に記憶する記憶ステップとを備える。
ここで、ランプ区間規定情報とは、本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有しているランプ区間を規定する情報である。
本線経路傾斜属性とは、ランプ区間における本線経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す属性である。
分岐経路傾斜属性とは、ランプ区間における分岐経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す属性である。
また、現在位置算出ステップで算出した現在位置情報をもとに自車両の現在位置がランプ区間に入っているか否かをナビゲーション部11のランプ区間判定手段18が判定するランプ区間判定ステップを備える。
【0074】
また、自車両の進行方向の前後の傾きであるピッチ角速度情報をピッチジャイロ3が検出するピッチ角情報検出ステップを備える。
また、ピッチ角情報検出ステップにおいてピッチジャイロ3により検出したピッチ角速度情報を所定のサンプリング周期でサンプリングし移動平均あるいは積算することで自車両が走行している経路の傾斜属性を傾斜属性判定手段31が判定する傾斜属性判定ステップを備える。
また、傾斜属性103と、ランプ区間における本線経路傾斜属性102と、ランプ区間における分岐経路傾斜属性101とに対応させて、自車両が走行している経路の経路判定結果をテーブルTBLとして規定するテーブル規定ステップを備える。
また、本線経路傾斜属性102と、分岐経路傾斜属性101と、傾斜属性103とをもとにテーブルを参照し、自車両の経路判定結果を車両経路判定手段32が取得する車両経路判定ステップとを備える。
ここで、本線経路傾斜属性102および分岐経路傾斜属性101は、ランプ区間について記憶部13から読み出され、傾斜属性103は、傾斜属性判定ステップにより判定されるものである。
以下、図3に示すフローチャートを参照し動作を説明する。
【0075】
先ず、走行中の車両がランプ区間近傍にあるか否かを判定する(ステップS1)。
このランプ区間近傍にあるか否かを判定は次のように行う。
すなわち、記憶部13に記憶されている地図データと前記ランプ区間規定データと自車両の現在位置とから自車両の現在位置が地図データ上で高速道路のランプ区間規定データにより規定される範囲(すなわちランプ区間)に入っているか否かを判定することで行う。
【0076】
自車両の現在位置がランプ区間に入っていると判定すると、そのランプ区間の分岐道路(ランプ)の分岐経路傾斜属性101と、前記ランプ区間の前記分岐道路が分岐している高速道路本線の本線経路傾斜属性102とを記憶部13から読み出す(ステップS2)。
【0077】
これら分岐経路傾斜属性101および本線経路傾斜属性102の傾斜属性は、上り勾配、下り勾配を判定するための上り閾値、下り閾値を基準に設定されている。
つまり前記上り閾値を上回る勾配を有している場合に上り勾配“UP”、前記下り閾値を下回る勾配を有している場合は下り勾配“DOWN”と設定されている。また、前記上り閾値と前記下り閾値の間に入る勾配を有している場合は水平“HORIZONTAL”などのように分岐道路(ランプ)ごとにあらかじめ設定されている。
【0078】
そして、分岐経路傾斜属性101と本線経路傾斜属性102とが同じ傾斜属性を有しているか否かを判定する(ステップS3)。
そして、分岐経路傾斜属性101と本線経路傾斜属性102とが同じ傾斜属性を有している場合、分岐道路(ランプ)と高速道路本線との経路判定は不可能としてステップS16へ進み、そのランプ区間を通過する。
【0079】
一方、分岐経路傾斜属性101と本線経路傾斜属性102とが異なる傾斜属性を有している場合にはピッチジャイロ3により検出される傾斜値について初期化を行う(ステップS4)。
【0080】
この傾斜値についての初期化は、ピッチジャイロ3により検出された傾斜値を格納するレジスタの初期化を含む。
【0081】
また、短い期間に出現するピッチジャイロセンサ3に作用する重力加速度の変化によるオフセット量の変動による影響を軽減させるため過去数十秒間のピッチジャイロセンサ3の測定値から学習した学習オフセット値をオフセット量に設定する初期化を含む。
【0082】
傾斜値について初期化処理が終了すると、ピッチジャイロ3により検出されるピッチ角速度をサンプリング周期ごとに取得する(ステップS5)。
【0083】
このとき、取得したピッチ角速度については前記学習した学習オフセット値をオフセット量として傾斜算出部6ではオフセット除去回路19によりオフセット除去処理を行う。
【0084】
また傾斜算出部6では、取り付け角検出部9により検出されたこのナビゲーション装置30の取り付け角を用いてピッチジャイロ3で検出されたピッチ角速度の補正をピッチ角補正手段17により行う。
そして、サンプリング周期ごとに取得したピッチ角速度を一定の走行距離を基準として
移動平均あるいは積算し車両の前後方向の傾斜角を算出する(ステップS6)。
【0085】
この結果、移動平均あるいは積算した車両の前後方向の傾斜角が下り勾配判定用の下り閾値を下回っていると判定すると、傾斜属性判定手段31は自車両が現在走行中の道路は下り勾配であると判定する(ステップS9)。
【0086】
また、前記積算した車両の前後方向の傾斜角が上り勾配判定用の上り閾値を上回っている判定すると、傾斜属性判定手段31は自車両が現在走行中の道路は上り勾配であると判定する(ステップS8)。
【0087】
また、前記積算した車両の前後方向の傾斜角が前記上り閾値と前記下り閾値の間に入っている、つまり下り閾値より大きく上り閾値より小さいと判定すると、ランプ区間を通過したか否かを判定する(ステップS19)。
そして、ランプ区間を通過していないと判定するとステップS5へ戻り、ステップS5、ステップS6、ステップS7の処理へ進む。
ステップS7において前記積算した車両の前後方向の傾斜角が前記上り閾値と前記下り閾値の間に入っている状態が継続しており、続くステップS19においてランプ区間を通過したと判定する。この場合、傾斜属性判定手段31は自車両が現在走行中の道路は水平と判定する。
つまりランプ区間を通過するまで前記積算した傾斜角が前記上り閾値と前記下り閾値の間に入っている状態が継続していると、自車両が現在走行中の道路は水平(平ら)であると判定する(ステップS10)。
【0088】
このようにして、傾斜算出部6の傾斜属性判定手段31において現在走行中の道路について“下り勾配”、“上り勾配”、あるいは“水平”の傾斜属性103を判定する。
続いて、傾斜算出部6の車両経路判定手段32は、ステップS2において取得したランプ勾配属性情報101と本線勾配属性情報102と、傾斜属性判定手段31において判定された傾斜属性103とをもとに、テーブルTBLを参照する(ステップS11)。
そして、現在走行中の道路が分岐道路であるか、本線側であるかを判定する(ステップS12、ステップS13、ステップS15)。
【0089】
例えば、自車両の現在位置がランプ区間に入っているとき、ステップS2で取得した現在走行中の道路の地図データ上の分岐経路傾斜属性101が上り勾配“UP”、本線経路傾斜属性102が水平“HORIZONTAL”であるとする。
このときステップS7で判定された判定された傾斜属性103が上り勾配“UP”であった場合、テーブルTBLを参照すると、現在走行中の道路は分岐道路(ランプ)であると判定する。
【0090】
あるいは、ステップS7で判定された傾斜属性103が水平“HORIZONTAL”であった場合、テーブルTBLを参照すると、現在走行中の道路は“非通過”つまり本線側を走行していると判定する。
【0091】
あるいは、ステップS7で判定された傾斜属性103が下り勾配“DOWN”であった場合、テーブルTBLを参照すると、現在走行中の道路は“非通過”つまり本線側を走行していると判定する。
【0092】
このように、自車両が現在走行中の道路が分岐道路(ランプ)であるか本線側であるかを傾斜属性から判定するため、データ処理が迅速に行われ、判定結果が即座に得られる。
【0093】
車両経路判定手段32において現在走行中の道路が分岐道路(ランプ)であるか本線側であるかの判定結果が得られると、傾斜算出部6からナビゲーション部11へ前記判定結果が通知される(ステップS14)。ナビゲーション部11は前記判定結果をもとに表示部12へ自車両の現在位置を表示する。
【0094】
この場合、ナビゲーション部11では、傾斜算出部6から通知された判定結果をもとに、現在走行中の自車両の現在位置を地図データ上の分岐道路(ランプ)上あるいは高速道路の本線上へ表示出力する。
そして、前記得られた判定結果は自車両の現在位置がランプ区間を外れるまで保持される(ステップS16)。
【0095】
本実施の形態によれば、自車両の現在位置がランプ区間に入っていると、そのランプ区間の分岐道路(ランプ)の分岐経路傾斜属性101と、前記分岐道路が分岐している高速道路本線の本線経路傾斜属性102とを記憶部13から読み出す。
そして、分岐経路傾斜属性101、本線経路傾斜属性102および判定される傾斜属性103に対応して判定結果104が設定されたテーブルTBLを、傾斜属性103と、分岐経路傾斜属性101と、本線経路傾斜属性102とをもとに参照する。そして、現在走行中の道路が分岐道路(ランプ)であるか本線側であるかの判定結果104を取得する。
【0096】
このように傾斜属性によりテーブルTBLを利用して在走行中の道路が分岐道路(ランプ)であるか本線側であるかを判定するため、データ処理が迅速に行われ、判定結果が即座に得られる車両経路判定方法および装置を提供できる効果がある。
また、並走する経路などにおいて案内経路とは異なる経路を走行したときの案内経路の修正を迅速に行うことができる車両経路判定方法および装置を提供できる効果がある。
【符号の説明】
【0097】
1……X軸加速度センサ(加速度センサ)、2……ヨージャイロセンサ(方位センサ)、3……ピッチジャイロセンサ(センサ)、4……平面速度算出部、5……平面位置算出部、6……傾斜算出部、8……GPS処理部、9……取り付け角検出部、11……ナビゲーション部、13……記憶部、17……ピッチ角補正手段、18……ランプ区間判定手段、19……オフセット除去回路、31……傾斜属性判定手段、32……車両経路判定手段、TBL……テーブル。
【特許請求の範囲】
【請求項1】
複数のGPS衛星からの信号をもとに、受信位置の緯度、経度を含む現在位置情報を算出する現在位置算出ステップと、
本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有しているランプ区間を規定するランプ区間規定情報と、前記ランプ区間における前記本線経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す本線経路傾斜属性と、前記ランプ区間における前記分岐経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す分岐経路傾斜属性とを、ランプ区間ごとに記憶部に記憶する記憶ステップと、
前記現在位置算出ステップで算出した現在位置情報をもとに自車両の現在位置が前記ランプ区間に入っているか否かを判定するランプ区間判定ステップと、
前記自車両の進行方向の前後の傾き変化であるピッチ角速度情報をセンサが検出するピッチ角速度情報検出ステップと、
前記ピッチ角速度情報検出ステップにおいて前記センサにより検出した前記ピッチ角速度情報を所定のサンプリング周期でサンプリングし積算することで前記自車両が走行している経路が上り勾配であるか下り勾配であるか、あるいは水平であるかの傾斜属性を判定する傾斜属性判定ステップと、
前記傾斜属性判定ステップにより判定する前記自車両が走行している前記傾斜属性と、前記ランプ区間における前記本線経路傾斜属性と、前記ランプ区間における分岐経路傾斜属性とに対応させて、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果をテーブルとして規定するテーブル規定ステップと、
前記ランプ区間判定ステップにより判定したランプ区間について前記記憶部から読み出された本線経路についての本線経路傾斜属性と、前記ランプ区間について前記記憶部から読み出された前記分岐経路についての分岐経路傾斜属性と、前記傾斜属性判定ステップにより判定した前記自車両が走行している前記傾斜属性とをもとに前記テーブルを参照し、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を取得する車両経路判定ステップと、
を備えたことを特徴とする車両経路判定方法。
【請求項2】
複数のGPS衛星からの信号をもとに、受信位置の緯度、経度を含む現在位置情報を算出するGPS処理部と、
本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有しているランプ区間を規定するランプ区間規定情報と、前記ランプ区間における前記本線経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す本線経路傾斜属性と、前記ランプ区間における前記分岐経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す分岐経路傾斜属性とを、ランプ区間ごとに記憶した記憶部と、
前記GPS処理部が算出した現在位置情報をもとに自車両の現在位置が前記ランプ区間に入っているか否かを判定するランプ区間判定手段と、
前記自車両の進行方向の前後の傾き変化であるピッチ角速度情報を出力するセンサと、
前記センサから出力される前記ピッチ角速度情報を所定のサンプリング周期で検出し移動平均することで前記自車両が走行している経路が上り勾配であるか下り勾配であるか、あるいは水平であるかの傾斜属性を判定する傾斜属性判定手段と、
前記傾斜属性判定手段により判定する前記自車両が走行している前記傾斜属性と、前記ランプ区間における前記本線経路傾斜属性と、前記ランプ区間における分岐経路傾斜属性とに対応させて、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を規定したテーブルと、
前記ランプ区間判定手段により判定されたランプ区間における前記記憶部から読み出された本線経路についての本線傾斜属性と、前記ランプ区間における前記記憶部から読み出された前記分岐経路についてのランプ傾斜属性と、前記傾斜属性判定手段により判定した前記自車両が走行している前記傾斜属性とをもとに前記テーブルを参照し、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を取得する車両経路判定手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項3】
前記センサはジャイロスコープを利用したピッチジャイロセンサであることを特徴とする請求項2記載のナビゲーション装置。
【請求項4】
前記自車両が直進する方向を基準としたときのナビゲーション装置の取り付け角に応じて、前記センサで検出したピッチ角速度を補正するピッチ角速度補正手段を備えたことを特徴とする請求項2記載のナビゲーション装置。
【請求項5】
前記センサで検出したピッチ角速度のオフセットを除去するオフセット除去回路を備えていることを特徴とする請求項2記載のナビゲーション装置。
【請求項6】
前記自車両の進行方向の加速度情報を検出する加速度センサと、
前記自車両の進行方向の方位角情報を検出する方位センサと、
前記加速度センサにより検出した前記自車両の進行方向の加速度情報と、前記方位センサにより検出した前記自車両の進行方向の方位角情報とをもとに、平面上の車両速度を算出する平面速度算出部と、
前記平面速度算出部により算出した前記平面上の車両速度をもとに前記自車両の地図データ上の現在位置を算出する平面位置算出部と、
を備えていることを特徴とする請求項2記載のナビゲーション装置。
【請求項1】
複数のGPS衛星からの信号をもとに、受信位置の緯度、経度を含む現在位置情報を算出する現在位置算出ステップと、
本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有しているランプ区間を規定するランプ区間規定情報と、前記ランプ区間における前記本線経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す本線経路傾斜属性と、前記ランプ区間における前記分岐経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す分岐経路傾斜属性とを、ランプ区間ごとに記憶部に記憶する記憶ステップと、
前記現在位置算出ステップで算出した現在位置情報をもとに自車両の現在位置が前記ランプ区間に入っているか否かを判定するランプ区間判定ステップと、
前記自車両の進行方向の前後の傾き変化であるピッチ角速度情報をセンサが検出するピッチ角速度情報検出ステップと、
前記ピッチ角速度情報検出ステップにおいて前記センサにより検出した前記ピッチ角速度情報を所定のサンプリング周期でサンプリングし積算することで前記自車両が走行している経路が上り勾配であるか下り勾配であるか、あるいは水平であるかの傾斜属性を判定する傾斜属性判定ステップと、
前記傾斜属性判定ステップにより判定する前記自車両が走行している前記傾斜属性と、前記ランプ区間における前記本線経路傾斜属性と、前記ランプ区間における分岐経路傾斜属性とに対応させて、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果をテーブルとして規定するテーブル規定ステップと、
前記ランプ区間判定ステップにより判定したランプ区間について前記記憶部から読み出された本線経路についての本線経路傾斜属性と、前記ランプ区間について前記記憶部から読み出された前記分岐経路についての分岐経路傾斜属性と、前記傾斜属性判定ステップにより判定した前記自車両が走行している前記傾斜属性とをもとに前記テーブルを参照し、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を取得する車両経路判定ステップと、
を備えたことを特徴とする車両経路判定方法。
【請求項2】
複数のGPS衛星からの信号をもとに、受信位置の緯度、経度を含む現在位置情報を算出するGPS処理部と、
本線経路およびこの本線経路から分岐する分岐経路の双方を含む分岐構造を有しているランプ区間を規定するランプ区間規定情報と、前記ランプ区間における前記本線経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す本線経路傾斜属性と、前記ランプ区間における前記分岐経路が上り勾配であるか下り勾配であるか、あるいは水平であるかを表す分岐経路傾斜属性とを、ランプ区間ごとに記憶した記憶部と、
前記GPS処理部が算出した現在位置情報をもとに自車両の現在位置が前記ランプ区間に入っているか否かを判定するランプ区間判定手段と、
前記自車両の進行方向の前後の傾き変化であるピッチ角速度情報を出力するセンサと、
前記センサから出力される前記ピッチ角速度情報を所定のサンプリング周期で検出し移動平均することで前記自車両が走行している経路が上り勾配であるか下り勾配であるか、あるいは水平であるかの傾斜属性を判定する傾斜属性判定手段と、
前記傾斜属性判定手段により判定する前記自車両が走行している前記傾斜属性と、前記ランプ区間における前記本線経路傾斜属性と、前記ランプ区間における分岐経路傾斜属性とに対応させて、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を規定したテーブルと、
前記ランプ区間判定手段により判定されたランプ区間における前記記憶部から読み出された本線経路についての本線傾斜属性と、前記ランプ区間における前記記憶部から読み出された前記分岐経路についてのランプ傾斜属性と、前記傾斜属性判定手段により判定した前記自車両が走行している前記傾斜属性とをもとに前記テーブルを参照し、前記自車両が走行している経路が本線経路であるか分岐経路であるかの経路判定結果を取得する車両経路判定手段と、
を備えたことを特徴とするナビゲーション装置。
【請求項3】
前記センサはジャイロスコープを利用したピッチジャイロセンサであることを特徴とする請求項2記載のナビゲーション装置。
【請求項4】
前記自車両が直進する方向を基準としたときのナビゲーション装置の取り付け角に応じて、前記センサで検出したピッチ角速度を補正するピッチ角速度補正手段を備えたことを特徴とする請求項2記載のナビゲーション装置。
【請求項5】
前記センサで検出したピッチ角速度のオフセットを除去するオフセット除去回路を備えていることを特徴とする請求項2記載のナビゲーション装置。
【請求項6】
前記自車両の進行方向の加速度情報を検出する加速度センサと、
前記自車両の進行方向の方位角情報を検出する方位センサと、
前記加速度センサにより検出した前記自車両の進行方向の加速度情報と、前記方位センサにより検出した前記自車両の進行方向の方位角情報とをもとに、平面上の車両速度を算出する平面速度算出部と、
前記平面速度算出部により算出した前記平面上の車両速度をもとに前記自車両の地図データ上の現在位置を算出する平面位置算出部と、
を備えていることを特徴とする請求項2記載のナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−38884(P2011−38884A)
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願番号】特願2009−185940(P2009−185940)
【出願日】平成21年8月10日(2009.8.10)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成23年2月24日(2011.2.24)
【国際特許分類】
【出願日】平成21年8月10日(2009.8.10)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]