
車両認識装置、車両認識方法、プログラム
【課題】背景画像を抽出することなく、先行車両や対向車両の認識率を向上させることができる車両認識装置を提供すること。
【解決手段】撮影手段50が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成手段101,102と、前記撮影手段が撮影した画像データから輝度画像を作成する輝度画像作成手段103と、s偏光画像及びp偏光画像から、路面に反射した車両ライトの画素領域を検出する反射領域検出手段104と、前記画素領域を車両認識の認識対象から除外した前記輝度画像から、前方の車両の光源を認識する車両認識手段105と、を有する車両認識装置100を提供する。
【解決手段】撮影手段50が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成手段101,102と、前記撮影手段が撮影した画像データから輝度画像を作成する輝度画像作成手段103と、s偏光画像及びp偏光画像から、路面に反射した車両ライトの画素領域を検出する反射領域検出手段104と、前記画素領域を車両認識の認識対象から除外した前記輝度画像から、前方の車両の光源を認識する車両認識手段105と、を有する車両認識装置100を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、撮影された画像から車両を認識する車両認識装置等に関する。
【背景技術】
【0002】
前方や周囲を撮影する種々のカメラが車両に搭載される場合がある。このような車載カメラを使用して、夜間、同じ車線の先行車両や対向車線の対向車両を認識することで、運転支援が可能になる。例えば、先行車両が認識された場合、車載側のシステムがドライバに警告を出して、衝突に注意喚起を促す。また、対向車両を認識した場合、車載側のシステムがハイビーム状態の前照灯をロービームに切り換えることで、対向車両のドライバの眩惑を抑制する。
【0003】
先行車両や対向車両を認識する方法には種々のものがあるが、夜間であれば、先行車両の画像データからテイルランプを検出することで先行車両を認識でき、また、対向車両のヘッドライトを検出することで、対向車両を認識することができる。
【0004】
しかしながら、雨天の場合、濡れた路面にテイルランプやヘッドライトが反射するため、車載カメラが撮影する画像データにライトそのもの以外にライトの反射光(以下、反斜ライトという)が含まれてしまう。このような外乱光の存在は、先行車両、対向車両の認識率を下げることが知られている。
【0005】
そこで、雨天の場合に認識率を向上させる技術が提案されている(例えば、特許文献1参照。)。特許文献1には、連続撮影した画像から背景画像を生成し、新しく入力した画像と背景画像の差分で、路面反射領域と車両領域を検出し、路面反射領域を除去した後、車両領域の矩形を抽出し、車両を認識する車両検出方法が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された車両検出方法は、車両にカメラが固定されているという前提の下、背景画像を抽出することで、車両を認識できる可能性があるが、背景画像を抽出しなければ、先行車両や対向車両の認識できないという問題がある。特に、車載カメラの向きが可変の場合には背景画像を抽出することが困難になる場合がある。
【0007】
本発明は、上記課題に鑑み、背景画像を抽出することなく、先行車両や対向車両の認識率を向上させることができる車両認識装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、撮影手段が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成手段と、前記撮影手段が撮影した画像データから輝度画像を作成する輝度画像作成手段と、s偏光画像及びp偏光画像から、路面に反射した車両ライトの画素領域を検出する反射領域検出手段と、前記輝度画像から前記画素領域を車両認識の認識対象から除外して、前方の車両の光源を認識する車両認識手段と、を有する車両認識装置を提供する。
【発明の効果】
【0009】
背景画像を抽出することなく、先行車両や対向車両の認識率を向上させることができる車両認識装置を提供することができる。
【図面の簡単な説明】
【0010】
【図1】車両認識装置による先行車両又は対向車両の認識を説明する図の一例である。
【図2】車載されたカメラのハードウェア構成について説明するブロック図の一例である。
【図3】偏光フィルタを説明する図の一例である。
【図4】車両認識装置の機能ブロック図の一例である。
【図5】垂直偏光画像と水平偏光画像の作成を説明する図の一例である。
【図6】反射ライトが撮影された画像データを模式的に説明する図の一例である。
【図7】車両認識装置が動作する手順を示すフローチャート図の一例である。
【発明を実施するための形態】
【0011】
以下、本発明を実施するための形態について図面を参照しながら説明する。
【0012】
〔原理構成の概略〕
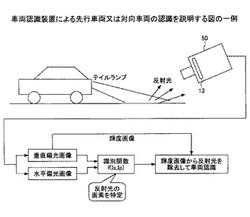
図1は、本実施形態の車両認識装置による先行車両又は対向車両の認識を説明する図の一例である。自車両の車載カメラ50は同じ走行車線の先行車両又は対向車線の対向車両を含む画像をほぼ周期的に撮影している。図1では先行車両の後部を含む被写体光を撮影しているが、対向車両が含まれる場合もある。撮影される画像データには、先行車両のテイルランプ(以下、対向車両のヘッドライトを含め車両ライトという)だけでなく、路面に反射した先行車両のテイルランプの反射光(以下、反射ライトという)が撮影されている。
【0013】
本実施形態の車載カメラ50は、偏光フィルタ13を有している。水面に無偏光の光が入射する場合、垂直偏光(s偏光)は反射しやすく、水平偏光(p偏光)は反射しにくいことが知られている。このため、水面からの反射光はs偏光が多くを占めるようになる。
【0014】
偏光フィルタ13は、1つのフィルタでs偏光部とp偏光部を有するように構成されている。s偏光部を通過した反射光はs偏光が多くカットされ、p偏光部を通過した反射光はp偏光が多くカットされる。s偏光部を通過した画像を水平偏光画像と呼び、p偏光部を通過した画像を垂直偏光画像と呼ぶことにする。よって、s偏光部を通過した水平偏光画像は、水面からの反射成分を大きく減衰した画像になるが、p偏光部を通過した垂直偏光画像は水面からの反射成分が多く含まれている。
【0015】
したがって、画像データにおいて反射ライトが撮影された領域は、水平偏光画像の輝度値が小さく、垂直偏光画像の輝度値が大きい傾向になる。本実施形態の車両認識装置は、水平偏光画像と垂直偏光画像のこの違いを利用して、車両認識用の画像データから反射ライト画素を除外する。
【0016】
車両認識装置は、水平偏光画像と垂直偏光画像の対応する画素位置の画素又はいくつかの画素毎に1組の画素値を取り出し、予め作成している識別関数に入力する。識別関数については後述する。識別関数は、反射ライトが撮影されていると画素と撮影されていない画素を識別する。
【0017】
また、車両認識装置は水平偏光画像と垂直偏光画像から輝度画像を作成しておく。車両認識装置は、輝度画像から反射ライトが撮影されている領域を除外して、先行車両又は対向車両を認識する。
【0018】
このように、本実施形態の車両認識装置は、路面からの反射光の偏光特性を利用して偏光フィルタで、濡れた路面による車両ライトの反射ライトを除外することで、車両の認識率を向上させ、誤認識率を低減させることができる。
【0019】
〔構成例〕
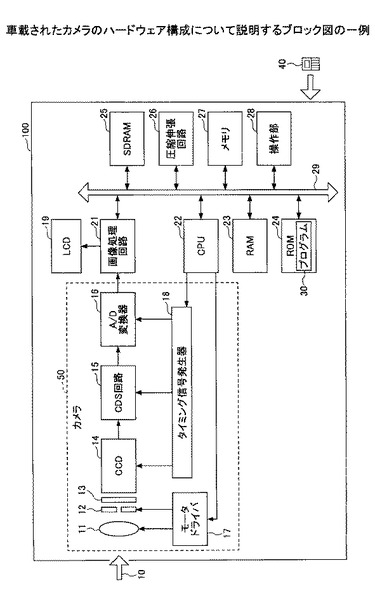
図2は、車両認識装置100のハードウェア構成について説明するブロック図の一例である。被写体光10は、まず撮影光学系11を通してCCD(Charge Coupled Device)14等の撮像素子に入射される。撮影素子の種類はCMOS(Complementary Metal Oxide Semiconductor)や裏面照射型CMOSなど制限されない。また、撮影光学系11とCCD14との間には、メカシャッタ12が配置されており、このメカシャッタ12によりCCD14への被写体光10を遮断することができる。また、CCD14の手前に偏光フィルタ13が配置されており、被写体光10は偏光フィルタ13を通過してからCCD14に入射する。なお、撮影光学系11及びメカシャッタ12は、CPU(Central Processing Unit)22により制御されるモータドライバ17より駆動される。
【0020】
CCD14は、撮像面に結像された光学像を電気信号に変換して、YCrCbやRGB各色のアナログの画像データとして出力する。CCD14がRGB信号を出力するカラーCCDの場合、所定の回路で輝度信号に変換される。CCD14から出力された画像データは、CDS(Correlated Double Sampling:相関2重サンプリング)回路15によりノイズ成分が除去され、A/D変換器16によりデジタル値に変換された後、画像処理回路21に対して出力される。図2では撮影光学系11からA/D変換器16までを車載カメラ50としているが、車載カメラ50と画像処理系は別体になっていてもよいし、図のように一体となっていてもよい。
【0021】
また、車両認識装置100では、画像処理回路21、CPU22、RAM(Random Access Memory)23、ROM(Read Only Memory)24、SDRAM(SynchronousDRAM)25、圧縮伸張回路26、メモリ27、及び、操作部28はバス29を介して接続されている。画像処理回路21は、画像データを一時格納するSDRAM25を用いて、YCrCb変換処理や、ホワイトバランス制御処理、コントラスト補正処理、エッジ強調処理、色変換処理などの各種画像処理を行う。ホワイトバランス処理は、画像情報の色濃さを調整し、コントラスト補正処理は、画像情報のコントラストを調整する画像処理である。エッジ強調処理は、画像情報のシャープネスを調整し、色変換処理は、画像情報の色合いを調整する画像処理である。また、画像処理回路21は、信号処理や画像処理が施された画像情報をLCD(液晶ディスプレイ)19に表示する。
【0022】
また、信号処理、画像処理が施された画像データは、圧縮伸張回路26を介してJPEGなどのフォーマットに変換されメモリ27に記録される。メモリ27は、車載カメラ50に内蔵されたフラッシュメモリ又は脱着可能なメモリカードである。圧縮伸張回路26は、操作部28から取得した指示によって、画像処理回路21から出力される画像データを圧縮してメモリ27に書き込む。また、メモリ27から読み出した画像データを伸張して画像処理回路21に出力する。画像処理回路21はLCD19に読み出した画像データを表示する。
【0023】
また、CCD14、CDS回路15、及び、A/D変換器16は、タイミング信号を発生するタイミング信号発生器18によりタイミングが制御されている。CPU22は、周囲の明るさや操作部28からの操作内容によってタイミング信号発生器18が生成するタイミングを制御する。なお、画像処理回路21、圧縮伸張回路26、メモリ27も、CPU22によって制御されている。
【0024】
CPU22はプログラム30などを格納した読み出し専用メモリであるROM24から読み出したプログラム30に従って各種演算処理を行い。各種の処理過程で、各種データ格納エリアなどに読み出し書き込み自在のメモリであるRAM23などをワークエリアとして利用する。プログラム30は記憶媒体40に記憶された状態で配布され、また、ネットワークを介して車両認識装置にダウンロードされる。
【0025】
CPU22はプログラム30を実行して、車両ライト反射光検知、除去、車両認識などを行う。すなわち、CPU22(プロセッサ)が上記ROM24からプログラム30を読み出して実行することにより、プログラム30がRAM23上にロードされ、車両認識結果を出力する。
【0026】
〔偏光フィルタについて〕
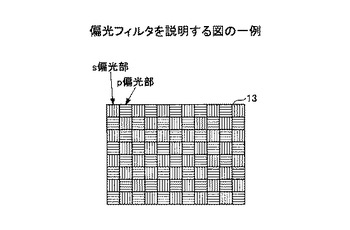
図3は、偏光フィルタ13を説明する図の一例である。この偏光フィルタ13は例えば、CCD14の結像面前に貼りつけられている。CCD14に直接貼り付けるのでなく、CCDの手前に配置してもよい。偏光フィルタ13はs偏光部とp偏光部が市松模様状に配置されたフィルタである。本実施形態ではs偏光部は、垂直方向に振動する被写体光10の通過を抑制し、水平偏光を多く通過させるとし、p偏光部は、水平方向に振動する被写体光10の通過を抑制し、垂直偏光を多く通過させるとする。
【0027】
したがって、s偏光部を通過した被写体光10は水平偏光画像となり、p偏光部を通過した被写体光10は垂直偏光画像となる。
【0028】
画像データにおいては、s偏光部、p偏光部を通過した光が到達する画素値はほぼ固定である。したがって、1枚の画像データにおいて、s偏光部を通過した光が結象する画素、p偏光部を通過した光が結象する画素は、それぞれ車両認識装置100において既知となっている。
【0029】
s偏光部とp偏光部の大きさは、CCD14の素子サイズを所定数以上に分割するようにして定められる。例えば、素子サイズを縦横にそれぞれ10〜1000程度に分割する。分割数は大きいほど好ましいが、大きいとCPU等の処理負荷が大きくなるため、実験的に適切な分割数を定める。
【0030】
なお、偏光フィルタ13の配置は一例であって、市松模様のように配置する以外に、水平方向にs偏光部とp偏光部をライン状に交互に配置してもよいし、垂直方向にs偏光部とp偏光部をライン状に交互に配置してもよい。または、ライン状に斜めに交互に配置することも可能である。また、s偏光部、p偏光部を無作為に配置してもよい。また、CCD14の全面にs偏光部とp偏光部を配置するのでなく、CCD14にs偏光部とp偏光部がない領域を設けてもよい。
【0031】
〔車両認識装置の機能について〕
図4は、車両認識装置100の機能ブロック図の一例である。車両認識装置100は、垂直偏光画像入力部101、水平偏光画像入力部102、輝度画像作成部103、車両ライト反射光検知部104、車両認識部105、及び、車両検知結果出力部106を有する。各機能ブロックは、CPU22がその他のハードウェアと協働しながら上記のプログラム30を実行することで実現される。
【0032】
<垂直偏光画像と水平偏光画像の作成>
垂直偏光画像入力部101は、1枚の画像データから垂直偏光画像を作成し、水平偏光画像入力部102は、1枚の画像データから水平偏光画像を作成する。
【0033】
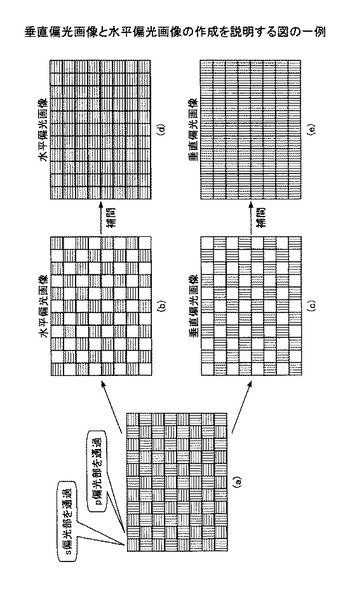
図5は垂直偏光画像と水平偏光画像の作成を説明する図の一例である。図5の画像データは説明のため縦横の線で表したが、実際には前方の車両や路面が撮影されている。1枚の画像データにはs偏光部とp偏光部を通過した被写体光10がどちらも撮影されている。図5(a)では、s偏光部を通過した被写体光は水平方向の光の振動を多く含み、p偏光部を通過した被写体光は垂直方向の光の振動を多く含むことを示している。よって、図5(a)の縦横のマスの配置は偏光フィルタ13と逆である。
【0034】
水平偏光画像入力部102は、s偏光部を通過した光が到達する画素の画素値のみを選択的に取り出し、それ以外の画素の画素値を黒画素ゼロ、白画素255又はNULL値等(以下、単にゼロの画素値とする)にしておく。図5(b)に示すように、水平偏光画像は、市松模様状にs偏光部を通過した光の画素値とゼロの画素値が配置されたものになる。図5(b)では白い領域がゼロの画素値で埋められた画素を示す。
【0035】
垂直偏光画像入力部101は、p偏光部を通過した光が到達する画素の画素値のみを選択的に取り出し、それ以外の画素の画素値をゼロやNULL値等にしておく。図5(c)に示すように、垂直偏光画像は、市松模様状にs偏光部を通過した光の画素値とゼロの画素値が配置されたものになる。水平偏光画像には反射ライトの成分が少なく、垂直偏光画像には反射ライトの成分が多く含まれている。
【0036】
このままでは、水平偏光画像の画素値がある領域に垂直偏光画像の画素値がなく、垂直偏光画像の画素値がある領域に水平偏光画像の画素値がない、という状態であるため、同じ画素の画素値の比較が困難になる。このため、水平偏光画像入力部102は、図5(d)に示すように、水平偏光画像に補間処理を施すことでゼロの画素値を、s偏光部を通過した被写体光10の画素の画素値で補間する。同様に、垂直偏光画像入力部101は、図5(e)に示すように、垂直偏光画像に補間処理を施すことでゼロの画素値を、p偏光部を通過した被写体光10の画素の画素値で補間する。これにより、車両認識装置100は水平偏光画像の画素値と垂直偏光画像の画素値を比較することができる。水平偏光画像及び垂直偏光画像は、SDRAM25に一時的に保存される。
【0037】
なお、画素の補間方法には、ニアレストネイバー(例えば、ゼロの画素を左右上下いずれかの画素値で置き換える)、バイリニア(例えば、ゼロの画素に隣接した左右上下の4つの画素の平均値又は4つの画素を関数に入れて画素値を算出し、ゼロの画素の画素値を置き換える)、バイキュービック(例えば、ゼロの画素に隣接した左右上下の16の画素を使用して、バイリニアと同様に置き換える)等を用いる。
【0038】
<車両ライトの反射ライトの検出>
図3に戻り、車両ライト反射光検知部104は、水平偏光画像と垂直偏光画像を使って、画像データから反射ライトを検出する。
【0039】
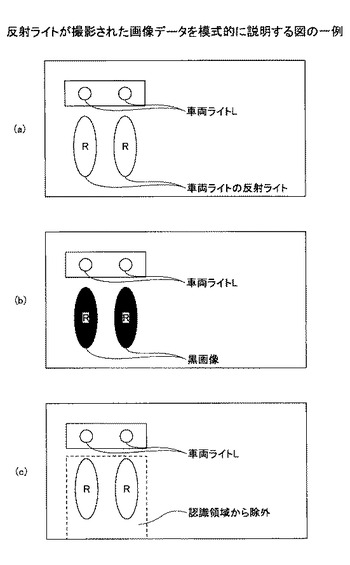
図6(a)は、反射ライトが撮影された画像データを模式的に説明する図の一例である。夜間に路面が濡れている場合、画像データには先行車両のテイルランプLと、路面に反射された反射ライトRがどちらも高い輝度で撮影される。車両ライト反射光検知部104はこのテイルランプLと反射ライトRを識別する。なお、テイルランプLでなく対向車両の前照灯の場合も、ほぼ同様に、前照灯に近い場所に反射ライトRが撮影される。
【0040】
本実施形態では、SVM(Support vector machine)機械学習方法を使って、画像データから反射ライトを検出する。SVMはパターン認識手法の一種で、教師付きデータにより異なるパターンを識別するための識別関数を作成する。また、教師としての学習データの分布に識別境界を定める際にパターン間(クラス間)の距離が最大になるように識別境界を定める(マージン最大化と呼ばれる)。
【0041】
この学習機能は車両認識装置100に搭載されている必要はなく、車両認識装置100が車両に搭載される前にコンピュータ等の学習装置200が識別関数を作成しておく。このため、図5では学習装置200を車両認識装置100とは別に示した。なお、車両認識装置100に学習機能を搭載してもよい。学習装置200は、車載カメラ50が撮影した画像データから水平偏光画像及び垂直偏光画像を作成するか、又は、少なくとも取得できるようになっている。
【0042】
まず、学習により作成される識別関数について説明する。SVMの識別関数は以下のように表すことができる。
f(x)=sign( g(x))
g(x)= ωtx+b
・sign()関数は、括弧内の数値が正の場合に"1"を、負の場合は"-1"を出力する。括弧内の数値が"0"の場合は"0"を出力する。
・xは入力ベクトルであり、本実施形態では水平偏光画像と垂直偏光画像の同じ場所の1組の画素値である。
・ω、bはg(x)のパラメータであり、ω、bを定めることがSVMの学習になる。
・tは転置行列を示す。
【0043】
入力ベクトルとしてのxは、夜間の路面に車両ライトが反射した画像データであり、所定の領域毎に、車両ライトが反射した画素領域か否かが教師信号yとして与えられている。所定の領域のサイズは、図5で説明した1つのs偏光部又はp偏光部に対応する領域、この領域を複数個まとめた領域などである。s偏光部又はp偏光部に対応する領域1つ分とすると、水平偏光画像と垂直偏光画像のどちらか一方は補間した領域だけとなってしまうので、複数個まとめた領域とすることが好ましい。以下、入力ベクトルとなる水平偏光画像及び垂直偏光画像の領域を、判定領域という。
【0044】
例えば、開発者は、1枚の画像データから生成された水平偏光画像及び垂直偏光画像を判定領域に区分して、例えば目視により確認した反射ライトが撮影されているか否かの判定結果(これが教師信号となる)を対応づける。したがって、水平偏光画像及び垂直偏光画像の1組の判定領域の画像と判定結果が得られる。これが学習データである。よって、入力ベクトルxは水平偏光画像及び垂直偏光画像の2つになる。また、判定結果は、反射ライトが撮影されている判定領域で"1"、それ以外で"−1"とする。なお、学習データは学習装置200のHDD(Hard Disk Drive)などに記憶される。
【0045】
開発者は、反射ライトが撮影された画像データをいくつか用意し、同様に、学習データを生成する。学習に用いられる画像データは、種々の状況で撮影された画像データであることが好ましい。例えば、夜間でも周囲が明るい場合や暗い場合、雨量が多い場合と少ない場合、先行車両との距離が近い場合と遠い場合などである。種々の状況で撮影された画像データで学習することで、反射ライトを車両ライトとして誤認識することが少なくなる。
【0046】
より具体的なSVMの学習処理には、ラグランジュ未定定数λを求める処理が必要になる。求め方は公知なので間単に説明する。学習装置200は、1つの学習データ(判定領域と判定結果)に対応して1つのラグランジュ未定乗数λiを定義する。ラグランジュ未定乗数には適当な初期値を与えておき、例えば、最急降下法によりラグランジュ未定乗数を求めることができる。ラグランジュ未定乗数λiを変えながらΔλiの変化量が十分に小さくなると学習できたことになる。ラグランジュ未定乗数λiが求められるとω、bは学習データの数をnとして以下のように求めることができる。
ω=Σλi・yi・xi(1組の学習データとλを乗算したものをn個加算する)
b=ys−wt・xs(xsは任意のxiであり、ysはxiに対応するyiである)
以上のようにして学習装置200が求めたf(x)=sign( g(x))を車両ライト反射光検知部104は予め記憶している。車両の走行中、車両ライト反射光検知部104は、垂直偏光画像入力部101が作成した垂直偏光画像と水平偏光画像入力部102が作成した水平偏光画像を判定領域に区分して、それぞれの例えば平均輝度値Is、Ipを算出し、f(x)に入力する。すなわち、Is、Ipが上記入力ベクトルのxiとなる(この場合はx1,x2の2つ)。
【0047】
識別関数f(Is,Ip)は、反射ライトが撮影された判定領域に対し"1"を、それ以外で"−1"を出力する。車両ライト反射光検知部104はこの出力結果を判定領域に対応づけて車両認識部105に通知する。これにより、車両認識部105は、輝度画像のうち、反射ライトが撮影された領域を取得することができる。
【0048】
なお、SVM以外の機械学習(例えば、ニューラルネットワーク、最近傍識別器(NN法))を利用して、反射ライトが撮影された領域か否かを判定してもよい。
【0049】
<輝度画像の作成>
図4に戻り、輝度画像作成部103は、SDRAM25に記憶されている水平偏光画像と垂直偏光画像から輝度画像を作成する。作成方法はどのようなものでもよいが、例えば、水平偏光画像と垂直偏光画像の画素単位又はいくつかの画素毎で平均値を算出する。または、開発者などが予め定めておいた重み付けを水平偏光画像と垂直偏光画像に行い加重平均を算出してもよい。
【0050】
また、偏光フィルタ13を可動式にしておき、偏光フィルタ13を通過した偏光画像と偏光フィルタ13を通過していない画像を交互に撮影し、偏光フィルタ13を通過していない画像から輝度画像を作成してもよい。例えば、車載カメラ50が30〔フレーム/sec〕で撮影している場合、2枚の画像の撮影時刻には33ミリ秒の差がある。同じ車線を走行している車両のテイルランプの反射ライトであれば、撮影された領域はこの時間内にそれほどずれていないと考えてよい。よって、偏光フィルタ13を通過していない画像から、反射ライトが撮影されている画素の領域を除外しても、ほぼ反射ライトの領域を正確に除外できる。また、ステレオカメラのようにほぼ同じ領域を撮影するカメラが別にあれば、そのカメラの輝度画像を使用してもよい。
<車両認識>
車両認識部105は、先行車両のテイルランプ及び対向車両のヘッドライトを検出することで、車両を認識する。認識処理の前に、本実施形態の車両認識部105は、輝度画像から、車両ライト反射光検知部104が検知した反射ライトが撮影された判定領域を除外する。
【0051】
図6(b)は、反射ライトが撮影された領域が除外された輝度画像を説明する図の一例である。図6(a)に示したように、画像データには反射ライトRが撮影された領域があり、反射ライトRの場所は車両ライト反射光検知部104により検出されている。車両認識部105は、図示するように、輝度画像から反射ライトRの領域を除外する。この除外とは、輝度値が十分に低ければよいので、例えば、黒画素ゼロで置き換えることをいう。
【0052】
また、輝度画像の画素値を操作するのでなく、反射ライトRの領域を含む矩形領域を車両認識の対象から除外してもよい。
図6(c)は反射ライトが撮影された領域が除外された輝度画像を説明する図の一例である。反射ライトRが撮影されることは、自車両と先行車両の間に別の車両はないことになるので、反射ライトRの領域の近くから車両を認識する必要はない。この場合、例えば、反射ライトRの左端から右端を含み、反射ライトRの上端以下の矩形領域を、認識領域から除外する。なお、対向車両のヘッドライトの反射ライトは、複数の対向車両が撮影されている場合があるので、反射ライトR領域の外接矩形を認識領域から除外する。
【0053】
こうすることで、認識範囲が狭くなるので、CPU22等の処理負荷を低減し、車両の認識にかかる時間を短縮できる。
【0054】
車両の認識方法としては公知の手法を採用できるが、本実施形態では上記のSVMを利用する。
【0055】
まず、開発者等が、学習のため、教師用の画像データとして車両ライトが撮影されている画像データと、車両ライトが撮影されていない画像データを用意する。教師用の画像データは、自車両からの距離に応じて用意することが好適である。
【0056】
入力ベクトルxは例えば以下の要素を有する。
x1:車両ライト(輝度が所定以上の領域)の縦横比
x2:明るさ(輝度値)
x3:2つの光源の間の距離
この他、識別に有効な要素を加えることができる。
【0057】
学習時、学習装置200は、画像データを探索し、x1として輝度が所定以上の領域があるとその領域の縦横比を決定する。また、x2としてその領域の輝度値の平均や最大値、最小値などを決定する。また、水平方向に同程度の明るさの領域があるか否かを判定し、ある場合にはx3として2つの明るい領域の中央間の距離を決定する。この組み合わせを入力ベクトルxとする。これにより、自車両と先行車両との距離が大きい場合は、x1,x2、x3がそれぞれ小さい入力ベクトルが得られ、自車両と先行車両との距離が小さい場合は、x1,x2、x3がそれぞれ大きい入力ベクトルが得られる。
【0058】
このようにして抽出された複数のx1〜x3の組が、車両認識の学習データとなる。また、判定結果yは、車両ライトが撮影されている画像データから抽出されたx1〜x3に対し"1"、車両ライトが撮影されていない画像データから抽出されたx1〜x3に対し"-1"となる。
【0059】
学習装置200は、最急降下法によりラグランジュ未定定数λを求めることで、ω、bを求める。ここでは識別関数をT(x)として車両認識部105に記憶しておく。
【0060】
車両認識部105は、車両の走行中、輝度画像からx1〜x3を検出し、T(x)に入力する。識別関数T(x1,x2,x3)は、反射ライトが撮影された画像データに対し"1"を、それ以外で"−1"を出力する。車両認識部105は、T(x)の出力が1になった場合の画像データに車両ライトが撮影されていると判定し、x1〜x3が検出された画素の位置情報を特定する。
【0061】
なお、1枚の画像データに複数台の車両の車両ライトが撮影されている場合があるが、この場合、T(x)が"1"を出力したそれぞれのx1〜x3が検出された画素の位置情報をそれぞれ特定すればよい。
【0062】
先行車両は車両ライト(テイルランプ)の移動速度が小さく、対向車両は車両ライト(ヘッドライト)の移動速度が大きいので、先行車両と対向車両は識別することができる。
【0063】
以上のように本実施形態では、反射ライトが除外された輝度画像から車両ライトを認識するので、路面の反射光を先行車両や対向車両のライトと誤認識することを低減し、車両の認識率を向上させることができる。
【0064】
<検知結果の出力>
車両検知結果出力部106は、先行車両や対向車両を認識したことを、車載装置に出力する。例えば、車載装置の1つである前照灯システムは、対向車両を認識したという通知を取得すると、ハイビームをロービームに切り換える。または、車両検知結果出力部106は、車載装置として、メータ系のコンピュータや警告装置に通知してもよい。メータ系のコンピュータや警告装置は、警告音を吹鳴したり、「ハイビームをロービームに切り換えてください」などの音声メッセージをスピーカら出力する。また、液晶などのディスプレイに同様のメッセージを表示してもよい。
【0065】
また、例えば、メータ系のコンピュータや警告装置は、先行車両の急接近を検出して、警告音を吹鳴したり、「前方の車両に接近しています」などのメッセージをスピーカやディスプレイに出力する。また、ブレーキ系のコンピュータが自動的制動してもよい。また、所定のコンピュータがシートベルトを巻き上げることで先行車両の接近を運転者に知らせてもよい。
【0066】
〔動作手順〕
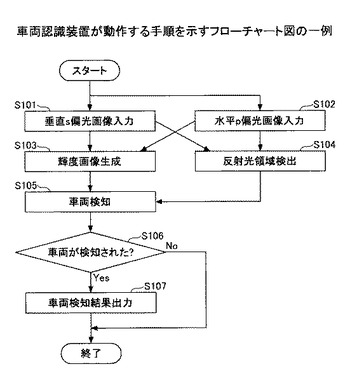
図7は、車両認識装置100が動作する手順を示すフローチャート図の一例である。
S100:車載カメラ50が画像データを撮影する。画像データは、垂直偏光画像入力部101と水平偏光画像入力部102にそれぞれ入力される。
S101:垂直偏光画像入力部101は、垂直偏光画像を作成する。
S102:水平偏光画像入力部102は、水平偏光画像を作成する。なお、S101とS102は並行して行われる。
S103:輝度画像作成部103が、垂直偏光画像と水平偏光画像から輝度画像を作成する。
S104:車両ライト反射光検知部104が、識別関数f(x)に垂直偏光画像と水平偏光画像を入力して、反射ライトが撮影されている画素又は画素領域を検出する。
S105:車両認識部105は、輝度画像から、反射ライトが撮影されている画素又は画素領域を除外して、先行車両及びは対向車両のライトを検出する。
S106:車両認識部105は、1枚の画像データ毎に先行車両又は対向車両が検出されたか否かを判定する。なお、先行車両又は対向車両のライトが検出された場合、先行車両又は対向車両が検出されたものとみなす。1枚だけの画像データでなく、所定枚数以上の画像データから先行車両又は対向車両が検出された場合に、先行車両又は対向車両が検出されたものと判定してもよい。こうすることで、認識精度を向上できる。
S107:先行車両又は対向車両が検出された場合、先行車両又は対向車両が検出されたものとして、車両検知結果出力部106が検知結果を出力する。
【0067】
車両認識装置100は、以上の処理を画像データに対し繰り返し行う。また、一度、先行車両又は対向車両が認識された場合、1枚毎ではなく所定枚数毎に図7の手順を実行してもよい。こうすることで、CPU22等の処理負荷を低減できる。
【0068】
以上説明したように、本実施形態の車両認識装置100は、水面に反射した車両ライトを偏光フィルタ13で偏光して水平偏光画像と垂直偏光画像を作成することで、車両ライトの反射ライトが映った画像と映っていない画像を作成できる。そして、この2つの画像データにより反射ライトの有無を学習しておくので、走行中の画像データの輝度画像から反射ライトの判定領域を高精度に除外できる。反射ライトの撮影範囲を除去することで車両の誤認識を抑制して、認識精度を向上させることができる。
【符号の説明】
【0069】
11 撮影光学系
12 メカシャッタ
13 偏光フィルタ
14 CCD
21 画像処理回路
22 CPU
25 SDRAM
30 プログラム
50 車載カメラ
100 車両認識装置
101 垂直偏光画像入力部
102 水平偏光画像入力部
103 輝度画像作成部
104 車両ライト反射光検知部
105 車両認識部
106 車両検知結果出力部
200 学習装置
【先行技術文献】
【特許文献】
【0070】
【特許文献1】特開2007−265016号公報
【技術分野】
【0001】
本発明は、撮影された画像から車両を認識する車両認識装置等に関する。
【背景技術】
【0002】
前方や周囲を撮影する種々のカメラが車両に搭載される場合がある。このような車載カメラを使用して、夜間、同じ車線の先行車両や対向車線の対向車両を認識することで、運転支援が可能になる。例えば、先行車両が認識された場合、車載側のシステムがドライバに警告を出して、衝突に注意喚起を促す。また、対向車両を認識した場合、車載側のシステムがハイビーム状態の前照灯をロービームに切り換えることで、対向車両のドライバの眩惑を抑制する。
【0003】
先行車両や対向車両を認識する方法には種々のものがあるが、夜間であれば、先行車両の画像データからテイルランプを検出することで先行車両を認識でき、また、対向車両のヘッドライトを検出することで、対向車両を認識することができる。
【0004】
しかしながら、雨天の場合、濡れた路面にテイルランプやヘッドライトが反射するため、車載カメラが撮影する画像データにライトそのもの以外にライトの反射光(以下、反斜ライトという)が含まれてしまう。このような外乱光の存在は、先行車両、対向車両の認識率を下げることが知られている。
【0005】
そこで、雨天の場合に認識率を向上させる技術が提案されている(例えば、特許文献1参照。)。特許文献1には、連続撮影した画像から背景画像を生成し、新しく入力した画像と背景画像の差分で、路面反射領域と車両領域を検出し、路面反射領域を除去した後、車両領域の矩形を抽出し、車両を認識する車両検出方法が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に開示された車両検出方法は、車両にカメラが固定されているという前提の下、背景画像を抽出することで、車両を認識できる可能性があるが、背景画像を抽出しなければ、先行車両や対向車両の認識できないという問題がある。特に、車載カメラの向きが可変の場合には背景画像を抽出することが困難になる場合がある。
【0007】
本発明は、上記課題に鑑み、背景画像を抽出することなく、先行車両や対向車両の認識率を向上させることができる車両認識装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、撮影手段が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成手段と、前記撮影手段が撮影した画像データから輝度画像を作成する輝度画像作成手段と、s偏光画像及びp偏光画像から、路面に反射した車両ライトの画素領域を検出する反射領域検出手段と、前記輝度画像から前記画素領域を車両認識の認識対象から除外して、前方の車両の光源を認識する車両認識手段と、を有する車両認識装置を提供する。
【発明の効果】
【0009】
背景画像を抽出することなく、先行車両や対向車両の認識率を向上させることができる車両認識装置を提供することができる。
【図面の簡単な説明】
【0010】
【図1】車両認識装置による先行車両又は対向車両の認識を説明する図の一例である。
【図2】車載されたカメラのハードウェア構成について説明するブロック図の一例である。
【図3】偏光フィルタを説明する図の一例である。
【図4】車両認識装置の機能ブロック図の一例である。
【図5】垂直偏光画像と水平偏光画像の作成を説明する図の一例である。
【図6】反射ライトが撮影された画像データを模式的に説明する図の一例である。
【図7】車両認識装置が動作する手順を示すフローチャート図の一例である。
【発明を実施するための形態】
【0011】
以下、本発明を実施するための形態について図面を参照しながら説明する。
【0012】
〔原理構成の概略〕
図1は、本実施形態の車両認識装置による先行車両又は対向車両の認識を説明する図の一例である。自車両の車載カメラ50は同じ走行車線の先行車両又は対向車線の対向車両を含む画像をほぼ周期的に撮影している。図1では先行車両の後部を含む被写体光を撮影しているが、対向車両が含まれる場合もある。撮影される画像データには、先行車両のテイルランプ(以下、対向車両のヘッドライトを含め車両ライトという)だけでなく、路面に反射した先行車両のテイルランプの反射光(以下、反射ライトという)が撮影されている。
【0013】
本実施形態の車載カメラ50は、偏光フィルタ13を有している。水面に無偏光の光が入射する場合、垂直偏光(s偏光)は反射しやすく、水平偏光(p偏光)は反射しにくいことが知られている。このため、水面からの反射光はs偏光が多くを占めるようになる。
【0014】
偏光フィルタ13は、1つのフィルタでs偏光部とp偏光部を有するように構成されている。s偏光部を通過した反射光はs偏光が多くカットされ、p偏光部を通過した反射光はp偏光が多くカットされる。s偏光部を通過した画像を水平偏光画像と呼び、p偏光部を通過した画像を垂直偏光画像と呼ぶことにする。よって、s偏光部を通過した水平偏光画像は、水面からの反射成分を大きく減衰した画像になるが、p偏光部を通過した垂直偏光画像は水面からの反射成分が多く含まれている。
【0015】
したがって、画像データにおいて反射ライトが撮影された領域は、水平偏光画像の輝度値が小さく、垂直偏光画像の輝度値が大きい傾向になる。本実施形態の車両認識装置は、水平偏光画像と垂直偏光画像のこの違いを利用して、車両認識用の画像データから反射ライト画素を除外する。
【0016】
車両認識装置は、水平偏光画像と垂直偏光画像の対応する画素位置の画素又はいくつかの画素毎に1組の画素値を取り出し、予め作成している識別関数に入力する。識別関数については後述する。識別関数は、反射ライトが撮影されていると画素と撮影されていない画素を識別する。
【0017】
また、車両認識装置は水平偏光画像と垂直偏光画像から輝度画像を作成しておく。車両認識装置は、輝度画像から反射ライトが撮影されている領域を除外して、先行車両又は対向車両を認識する。
【0018】
このように、本実施形態の車両認識装置は、路面からの反射光の偏光特性を利用して偏光フィルタで、濡れた路面による車両ライトの反射ライトを除外することで、車両の認識率を向上させ、誤認識率を低減させることができる。
【0019】
〔構成例〕
図2は、車両認識装置100のハードウェア構成について説明するブロック図の一例である。被写体光10は、まず撮影光学系11を通してCCD(Charge Coupled Device)14等の撮像素子に入射される。撮影素子の種類はCMOS(Complementary Metal Oxide Semiconductor)や裏面照射型CMOSなど制限されない。また、撮影光学系11とCCD14との間には、メカシャッタ12が配置されており、このメカシャッタ12によりCCD14への被写体光10を遮断することができる。また、CCD14の手前に偏光フィルタ13が配置されており、被写体光10は偏光フィルタ13を通過してからCCD14に入射する。なお、撮影光学系11及びメカシャッタ12は、CPU(Central Processing Unit)22により制御されるモータドライバ17より駆動される。
【0020】
CCD14は、撮像面に結像された光学像を電気信号に変換して、YCrCbやRGB各色のアナログの画像データとして出力する。CCD14がRGB信号を出力するカラーCCDの場合、所定の回路で輝度信号に変換される。CCD14から出力された画像データは、CDS(Correlated Double Sampling:相関2重サンプリング)回路15によりノイズ成分が除去され、A/D変換器16によりデジタル値に変換された後、画像処理回路21に対して出力される。図2では撮影光学系11からA/D変換器16までを車載カメラ50としているが、車載カメラ50と画像処理系は別体になっていてもよいし、図のように一体となっていてもよい。
【0021】
また、車両認識装置100では、画像処理回路21、CPU22、RAM(Random Access Memory)23、ROM(Read Only Memory)24、SDRAM(SynchronousDRAM)25、圧縮伸張回路26、メモリ27、及び、操作部28はバス29を介して接続されている。画像処理回路21は、画像データを一時格納するSDRAM25を用いて、YCrCb変換処理や、ホワイトバランス制御処理、コントラスト補正処理、エッジ強調処理、色変換処理などの各種画像処理を行う。ホワイトバランス処理は、画像情報の色濃さを調整し、コントラスト補正処理は、画像情報のコントラストを調整する画像処理である。エッジ強調処理は、画像情報のシャープネスを調整し、色変換処理は、画像情報の色合いを調整する画像処理である。また、画像処理回路21は、信号処理や画像処理が施された画像情報をLCD(液晶ディスプレイ)19に表示する。
【0022】
また、信号処理、画像処理が施された画像データは、圧縮伸張回路26を介してJPEGなどのフォーマットに変換されメモリ27に記録される。メモリ27は、車載カメラ50に内蔵されたフラッシュメモリ又は脱着可能なメモリカードである。圧縮伸張回路26は、操作部28から取得した指示によって、画像処理回路21から出力される画像データを圧縮してメモリ27に書き込む。また、メモリ27から読み出した画像データを伸張して画像処理回路21に出力する。画像処理回路21はLCD19に読み出した画像データを表示する。
【0023】
また、CCD14、CDS回路15、及び、A/D変換器16は、タイミング信号を発生するタイミング信号発生器18によりタイミングが制御されている。CPU22は、周囲の明るさや操作部28からの操作内容によってタイミング信号発生器18が生成するタイミングを制御する。なお、画像処理回路21、圧縮伸張回路26、メモリ27も、CPU22によって制御されている。
【0024】
CPU22はプログラム30などを格納した読み出し専用メモリであるROM24から読み出したプログラム30に従って各種演算処理を行い。各種の処理過程で、各種データ格納エリアなどに読み出し書き込み自在のメモリであるRAM23などをワークエリアとして利用する。プログラム30は記憶媒体40に記憶された状態で配布され、また、ネットワークを介して車両認識装置にダウンロードされる。
【0025】
CPU22はプログラム30を実行して、車両ライト反射光検知、除去、車両認識などを行う。すなわち、CPU22(プロセッサ)が上記ROM24からプログラム30を読み出して実行することにより、プログラム30がRAM23上にロードされ、車両認識結果を出力する。
【0026】
〔偏光フィルタについて〕
図3は、偏光フィルタ13を説明する図の一例である。この偏光フィルタ13は例えば、CCD14の結像面前に貼りつけられている。CCD14に直接貼り付けるのでなく、CCDの手前に配置してもよい。偏光フィルタ13はs偏光部とp偏光部が市松模様状に配置されたフィルタである。本実施形態ではs偏光部は、垂直方向に振動する被写体光10の通過を抑制し、水平偏光を多く通過させるとし、p偏光部は、水平方向に振動する被写体光10の通過を抑制し、垂直偏光を多く通過させるとする。
【0027】
したがって、s偏光部を通過した被写体光10は水平偏光画像となり、p偏光部を通過した被写体光10は垂直偏光画像となる。
【0028】
画像データにおいては、s偏光部、p偏光部を通過した光が到達する画素値はほぼ固定である。したがって、1枚の画像データにおいて、s偏光部を通過した光が結象する画素、p偏光部を通過した光が結象する画素は、それぞれ車両認識装置100において既知となっている。
【0029】
s偏光部とp偏光部の大きさは、CCD14の素子サイズを所定数以上に分割するようにして定められる。例えば、素子サイズを縦横にそれぞれ10〜1000程度に分割する。分割数は大きいほど好ましいが、大きいとCPU等の処理負荷が大きくなるため、実験的に適切な分割数を定める。
【0030】
なお、偏光フィルタ13の配置は一例であって、市松模様のように配置する以外に、水平方向にs偏光部とp偏光部をライン状に交互に配置してもよいし、垂直方向にs偏光部とp偏光部をライン状に交互に配置してもよい。または、ライン状に斜めに交互に配置することも可能である。また、s偏光部、p偏光部を無作為に配置してもよい。また、CCD14の全面にs偏光部とp偏光部を配置するのでなく、CCD14にs偏光部とp偏光部がない領域を設けてもよい。
【0031】
〔車両認識装置の機能について〕
図4は、車両認識装置100の機能ブロック図の一例である。車両認識装置100は、垂直偏光画像入力部101、水平偏光画像入力部102、輝度画像作成部103、車両ライト反射光検知部104、車両認識部105、及び、車両検知結果出力部106を有する。各機能ブロックは、CPU22がその他のハードウェアと協働しながら上記のプログラム30を実行することで実現される。
【0032】
<垂直偏光画像と水平偏光画像の作成>
垂直偏光画像入力部101は、1枚の画像データから垂直偏光画像を作成し、水平偏光画像入力部102は、1枚の画像データから水平偏光画像を作成する。
【0033】
図5は垂直偏光画像と水平偏光画像の作成を説明する図の一例である。図5の画像データは説明のため縦横の線で表したが、実際には前方の車両や路面が撮影されている。1枚の画像データにはs偏光部とp偏光部を通過した被写体光10がどちらも撮影されている。図5(a)では、s偏光部を通過した被写体光は水平方向の光の振動を多く含み、p偏光部を通過した被写体光は垂直方向の光の振動を多く含むことを示している。よって、図5(a)の縦横のマスの配置は偏光フィルタ13と逆である。
【0034】
水平偏光画像入力部102は、s偏光部を通過した光が到達する画素の画素値のみを選択的に取り出し、それ以外の画素の画素値を黒画素ゼロ、白画素255又はNULL値等(以下、単にゼロの画素値とする)にしておく。図5(b)に示すように、水平偏光画像は、市松模様状にs偏光部を通過した光の画素値とゼロの画素値が配置されたものになる。図5(b)では白い領域がゼロの画素値で埋められた画素を示す。
【0035】
垂直偏光画像入力部101は、p偏光部を通過した光が到達する画素の画素値のみを選択的に取り出し、それ以外の画素の画素値をゼロやNULL値等にしておく。図5(c)に示すように、垂直偏光画像は、市松模様状にs偏光部を通過した光の画素値とゼロの画素値が配置されたものになる。水平偏光画像には反射ライトの成分が少なく、垂直偏光画像には反射ライトの成分が多く含まれている。
【0036】
このままでは、水平偏光画像の画素値がある領域に垂直偏光画像の画素値がなく、垂直偏光画像の画素値がある領域に水平偏光画像の画素値がない、という状態であるため、同じ画素の画素値の比較が困難になる。このため、水平偏光画像入力部102は、図5(d)に示すように、水平偏光画像に補間処理を施すことでゼロの画素値を、s偏光部を通過した被写体光10の画素の画素値で補間する。同様に、垂直偏光画像入力部101は、図5(e)に示すように、垂直偏光画像に補間処理を施すことでゼロの画素値を、p偏光部を通過した被写体光10の画素の画素値で補間する。これにより、車両認識装置100は水平偏光画像の画素値と垂直偏光画像の画素値を比較することができる。水平偏光画像及び垂直偏光画像は、SDRAM25に一時的に保存される。
【0037】
なお、画素の補間方法には、ニアレストネイバー(例えば、ゼロの画素を左右上下いずれかの画素値で置き換える)、バイリニア(例えば、ゼロの画素に隣接した左右上下の4つの画素の平均値又は4つの画素を関数に入れて画素値を算出し、ゼロの画素の画素値を置き換える)、バイキュービック(例えば、ゼロの画素に隣接した左右上下の16の画素を使用して、バイリニアと同様に置き換える)等を用いる。
【0038】
<車両ライトの反射ライトの検出>
図3に戻り、車両ライト反射光検知部104は、水平偏光画像と垂直偏光画像を使って、画像データから反射ライトを検出する。
【0039】
図6(a)は、反射ライトが撮影された画像データを模式的に説明する図の一例である。夜間に路面が濡れている場合、画像データには先行車両のテイルランプLと、路面に反射された反射ライトRがどちらも高い輝度で撮影される。車両ライト反射光検知部104はこのテイルランプLと反射ライトRを識別する。なお、テイルランプLでなく対向車両の前照灯の場合も、ほぼ同様に、前照灯に近い場所に反射ライトRが撮影される。
【0040】
本実施形態では、SVM(Support vector machine)機械学習方法を使って、画像データから反射ライトを検出する。SVMはパターン認識手法の一種で、教師付きデータにより異なるパターンを識別するための識別関数を作成する。また、教師としての学習データの分布に識別境界を定める際にパターン間(クラス間)の距離が最大になるように識別境界を定める(マージン最大化と呼ばれる)。
【0041】
この学習機能は車両認識装置100に搭載されている必要はなく、車両認識装置100が車両に搭載される前にコンピュータ等の学習装置200が識別関数を作成しておく。このため、図5では学習装置200を車両認識装置100とは別に示した。なお、車両認識装置100に学習機能を搭載してもよい。学習装置200は、車載カメラ50が撮影した画像データから水平偏光画像及び垂直偏光画像を作成するか、又は、少なくとも取得できるようになっている。
【0042】
まず、学習により作成される識別関数について説明する。SVMの識別関数は以下のように表すことができる。
f(x)=sign( g(x))
g(x)= ωtx+b
・sign()関数は、括弧内の数値が正の場合に"1"を、負の場合は"-1"を出力する。括弧内の数値が"0"の場合は"0"を出力する。
・xは入力ベクトルであり、本実施形態では水平偏光画像と垂直偏光画像の同じ場所の1組の画素値である。
・ω、bはg(x)のパラメータであり、ω、bを定めることがSVMの学習になる。
・tは転置行列を示す。
【0043】
入力ベクトルとしてのxは、夜間の路面に車両ライトが反射した画像データであり、所定の領域毎に、車両ライトが反射した画素領域か否かが教師信号yとして与えられている。所定の領域のサイズは、図5で説明した1つのs偏光部又はp偏光部に対応する領域、この領域を複数個まとめた領域などである。s偏光部又はp偏光部に対応する領域1つ分とすると、水平偏光画像と垂直偏光画像のどちらか一方は補間した領域だけとなってしまうので、複数個まとめた領域とすることが好ましい。以下、入力ベクトルとなる水平偏光画像及び垂直偏光画像の領域を、判定領域という。
【0044】
例えば、開発者は、1枚の画像データから生成された水平偏光画像及び垂直偏光画像を判定領域に区分して、例えば目視により確認した反射ライトが撮影されているか否かの判定結果(これが教師信号となる)を対応づける。したがって、水平偏光画像及び垂直偏光画像の1組の判定領域の画像と判定結果が得られる。これが学習データである。よって、入力ベクトルxは水平偏光画像及び垂直偏光画像の2つになる。また、判定結果は、反射ライトが撮影されている判定領域で"1"、それ以外で"−1"とする。なお、学習データは学習装置200のHDD(Hard Disk Drive)などに記憶される。
【0045】
開発者は、反射ライトが撮影された画像データをいくつか用意し、同様に、学習データを生成する。学習に用いられる画像データは、種々の状況で撮影された画像データであることが好ましい。例えば、夜間でも周囲が明るい場合や暗い場合、雨量が多い場合と少ない場合、先行車両との距離が近い場合と遠い場合などである。種々の状況で撮影された画像データで学習することで、反射ライトを車両ライトとして誤認識することが少なくなる。
【0046】
より具体的なSVMの学習処理には、ラグランジュ未定定数λを求める処理が必要になる。求め方は公知なので間単に説明する。学習装置200は、1つの学習データ(判定領域と判定結果)に対応して1つのラグランジュ未定乗数λiを定義する。ラグランジュ未定乗数には適当な初期値を与えておき、例えば、最急降下法によりラグランジュ未定乗数を求めることができる。ラグランジュ未定乗数λiを変えながらΔλiの変化量が十分に小さくなると学習できたことになる。ラグランジュ未定乗数λiが求められるとω、bは学習データの数をnとして以下のように求めることができる。
ω=Σλi・yi・xi(1組の学習データとλを乗算したものをn個加算する)
b=ys−wt・xs(xsは任意のxiであり、ysはxiに対応するyiである)
以上のようにして学習装置200が求めたf(x)=sign( g(x))を車両ライト反射光検知部104は予め記憶している。車両の走行中、車両ライト反射光検知部104は、垂直偏光画像入力部101が作成した垂直偏光画像と水平偏光画像入力部102が作成した水平偏光画像を判定領域に区分して、それぞれの例えば平均輝度値Is、Ipを算出し、f(x)に入力する。すなわち、Is、Ipが上記入力ベクトルのxiとなる(この場合はx1,x2の2つ)。
【0047】
識別関数f(Is,Ip)は、反射ライトが撮影された判定領域に対し"1"を、それ以外で"−1"を出力する。車両ライト反射光検知部104はこの出力結果を判定領域に対応づけて車両認識部105に通知する。これにより、車両認識部105は、輝度画像のうち、反射ライトが撮影された領域を取得することができる。
【0048】
なお、SVM以外の機械学習(例えば、ニューラルネットワーク、最近傍識別器(NN法))を利用して、反射ライトが撮影された領域か否かを判定してもよい。
【0049】
<輝度画像の作成>
図4に戻り、輝度画像作成部103は、SDRAM25に記憶されている水平偏光画像と垂直偏光画像から輝度画像を作成する。作成方法はどのようなものでもよいが、例えば、水平偏光画像と垂直偏光画像の画素単位又はいくつかの画素毎で平均値を算出する。または、開発者などが予め定めておいた重み付けを水平偏光画像と垂直偏光画像に行い加重平均を算出してもよい。
【0050】
また、偏光フィルタ13を可動式にしておき、偏光フィルタ13を通過した偏光画像と偏光フィルタ13を通過していない画像を交互に撮影し、偏光フィルタ13を通過していない画像から輝度画像を作成してもよい。例えば、車載カメラ50が30〔フレーム/sec〕で撮影している場合、2枚の画像の撮影時刻には33ミリ秒の差がある。同じ車線を走行している車両のテイルランプの反射ライトであれば、撮影された領域はこの時間内にそれほどずれていないと考えてよい。よって、偏光フィルタ13を通過していない画像から、反射ライトが撮影されている画素の領域を除外しても、ほぼ反射ライトの領域を正確に除外できる。また、ステレオカメラのようにほぼ同じ領域を撮影するカメラが別にあれば、そのカメラの輝度画像を使用してもよい。
<車両認識>
車両認識部105は、先行車両のテイルランプ及び対向車両のヘッドライトを検出することで、車両を認識する。認識処理の前に、本実施形態の車両認識部105は、輝度画像から、車両ライト反射光検知部104が検知した反射ライトが撮影された判定領域を除外する。
【0051】
図6(b)は、反射ライトが撮影された領域が除外された輝度画像を説明する図の一例である。図6(a)に示したように、画像データには反射ライトRが撮影された領域があり、反射ライトRの場所は車両ライト反射光検知部104により検出されている。車両認識部105は、図示するように、輝度画像から反射ライトRの領域を除外する。この除外とは、輝度値が十分に低ければよいので、例えば、黒画素ゼロで置き換えることをいう。
【0052】
また、輝度画像の画素値を操作するのでなく、反射ライトRの領域を含む矩形領域を車両認識の対象から除外してもよい。
図6(c)は反射ライトが撮影された領域が除外された輝度画像を説明する図の一例である。反射ライトRが撮影されることは、自車両と先行車両の間に別の車両はないことになるので、反射ライトRの領域の近くから車両を認識する必要はない。この場合、例えば、反射ライトRの左端から右端を含み、反射ライトRの上端以下の矩形領域を、認識領域から除外する。なお、対向車両のヘッドライトの反射ライトは、複数の対向車両が撮影されている場合があるので、反射ライトR領域の外接矩形を認識領域から除外する。
【0053】
こうすることで、認識範囲が狭くなるので、CPU22等の処理負荷を低減し、車両の認識にかかる時間を短縮できる。
【0054】
車両の認識方法としては公知の手法を採用できるが、本実施形態では上記のSVMを利用する。
【0055】
まず、開発者等が、学習のため、教師用の画像データとして車両ライトが撮影されている画像データと、車両ライトが撮影されていない画像データを用意する。教師用の画像データは、自車両からの距離に応じて用意することが好適である。
【0056】
入力ベクトルxは例えば以下の要素を有する。
x1:車両ライト(輝度が所定以上の領域)の縦横比
x2:明るさ(輝度値)
x3:2つの光源の間の距離
この他、識別に有効な要素を加えることができる。
【0057】
学習時、学習装置200は、画像データを探索し、x1として輝度が所定以上の領域があるとその領域の縦横比を決定する。また、x2としてその領域の輝度値の平均や最大値、最小値などを決定する。また、水平方向に同程度の明るさの領域があるか否かを判定し、ある場合にはx3として2つの明るい領域の中央間の距離を決定する。この組み合わせを入力ベクトルxとする。これにより、自車両と先行車両との距離が大きい場合は、x1,x2、x3がそれぞれ小さい入力ベクトルが得られ、自車両と先行車両との距離が小さい場合は、x1,x2、x3がそれぞれ大きい入力ベクトルが得られる。
【0058】
このようにして抽出された複数のx1〜x3の組が、車両認識の学習データとなる。また、判定結果yは、車両ライトが撮影されている画像データから抽出されたx1〜x3に対し"1"、車両ライトが撮影されていない画像データから抽出されたx1〜x3に対し"-1"となる。
【0059】
学習装置200は、最急降下法によりラグランジュ未定定数λを求めることで、ω、bを求める。ここでは識別関数をT(x)として車両認識部105に記憶しておく。
【0060】
車両認識部105は、車両の走行中、輝度画像からx1〜x3を検出し、T(x)に入力する。識別関数T(x1,x2,x3)は、反射ライトが撮影された画像データに対し"1"を、それ以外で"−1"を出力する。車両認識部105は、T(x)の出力が1になった場合の画像データに車両ライトが撮影されていると判定し、x1〜x3が検出された画素の位置情報を特定する。
【0061】
なお、1枚の画像データに複数台の車両の車両ライトが撮影されている場合があるが、この場合、T(x)が"1"を出力したそれぞれのx1〜x3が検出された画素の位置情報をそれぞれ特定すればよい。
【0062】
先行車両は車両ライト(テイルランプ)の移動速度が小さく、対向車両は車両ライト(ヘッドライト)の移動速度が大きいので、先行車両と対向車両は識別することができる。
【0063】
以上のように本実施形態では、反射ライトが除外された輝度画像から車両ライトを認識するので、路面の反射光を先行車両や対向車両のライトと誤認識することを低減し、車両の認識率を向上させることができる。
【0064】
<検知結果の出力>
車両検知結果出力部106は、先行車両や対向車両を認識したことを、車載装置に出力する。例えば、車載装置の1つである前照灯システムは、対向車両を認識したという通知を取得すると、ハイビームをロービームに切り換える。または、車両検知結果出力部106は、車載装置として、メータ系のコンピュータや警告装置に通知してもよい。メータ系のコンピュータや警告装置は、警告音を吹鳴したり、「ハイビームをロービームに切り換えてください」などの音声メッセージをスピーカら出力する。また、液晶などのディスプレイに同様のメッセージを表示してもよい。
【0065】
また、例えば、メータ系のコンピュータや警告装置は、先行車両の急接近を検出して、警告音を吹鳴したり、「前方の車両に接近しています」などのメッセージをスピーカやディスプレイに出力する。また、ブレーキ系のコンピュータが自動的制動してもよい。また、所定のコンピュータがシートベルトを巻き上げることで先行車両の接近を運転者に知らせてもよい。
【0066】
〔動作手順〕
図7は、車両認識装置100が動作する手順を示すフローチャート図の一例である。
S100:車載カメラ50が画像データを撮影する。画像データは、垂直偏光画像入力部101と水平偏光画像入力部102にそれぞれ入力される。
S101:垂直偏光画像入力部101は、垂直偏光画像を作成する。
S102:水平偏光画像入力部102は、水平偏光画像を作成する。なお、S101とS102は並行して行われる。
S103:輝度画像作成部103が、垂直偏光画像と水平偏光画像から輝度画像を作成する。
S104:車両ライト反射光検知部104が、識別関数f(x)に垂直偏光画像と水平偏光画像を入力して、反射ライトが撮影されている画素又は画素領域を検出する。
S105:車両認識部105は、輝度画像から、反射ライトが撮影されている画素又は画素領域を除外して、先行車両及びは対向車両のライトを検出する。
S106:車両認識部105は、1枚の画像データ毎に先行車両又は対向車両が検出されたか否かを判定する。なお、先行車両又は対向車両のライトが検出された場合、先行車両又は対向車両が検出されたものとみなす。1枚だけの画像データでなく、所定枚数以上の画像データから先行車両又は対向車両が検出された場合に、先行車両又は対向車両が検出されたものと判定してもよい。こうすることで、認識精度を向上できる。
S107:先行車両又は対向車両が検出された場合、先行車両又は対向車両が検出されたものとして、車両検知結果出力部106が検知結果を出力する。
【0067】
車両認識装置100は、以上の処理を画像データに対し繰り返し行う。また、一度、先行車両又は対向車両が認識された場合、1枚毎ではなく所定枚数毎に図7の手順を実行してもよい。こうすることで、CPU22等の処理負荷を低減できる。
【0068】
以上説明したように、本実施形態の車両認識装置100は、水面に反射した車両ライトを偏光フィルタ13で偏光して水平偏光画像と垂直偏光画像を作成することで、車両ライトの反射ライトが映った画像と映っていない画像を作成できる。そして、この2つの画像データにより反射ライトの有無を学習しておくので、走行中の画像データの輝度画像から反射ライトの判定領域を高精度に除外できる。反射ライトの撮影範囲を除去することで車両の誤認識を抑制して、認識精度を向上させることができる。
【符号の説明】
【0069】
11 撮影光学系
12 メカシャッタ
13 偏光フィルタ
14 CCD
21 画像処理回路
22 CPU
25 SDRAM
30 プログラム
50 車載カメラ
100 車両認識装置
101 垂直偏光画像入力部
102 水平偏光画像入力部
103 輝度画像作成部
104 車両ライト反射光検知部
105 車両認識部
106 車両検知結果出力部
200 学習装置
【先行技術文献】
【特許文献】
【0070】
【特許文献1】特開2007−265016号公報
【特許請求の範囲】
【請求項1】
撮影手段が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成手段と、
前記撮影手段が撮影した画像データから輝度画像を作成する輝度画像作成手段と、
s偏光画像及びp偏光画像から、路面に反射した車両ライトが映った画素領域を検出する反射領域検出手段と、
前記画素領域を車両認識の認識対象から除外した前記輝度画像から、前方の車両の光源を認識する車両認識手段と、
を有することを特徴とする車両認識装置。
【請求項2】
前記反射領域検出手段は、同じ画素位置のs偏光画像及びp偏光画像の画素又は複数の画素の画素値をそれぞれ識別関数に入力して、画素又は複数の画素が、車両ライトが映った前記画素領域か否かを判定する、
ことを特徴とする請求項1記載の車両認識装置。
【請求項3】
前記識別関数は、
同じ画素位置のs偏光画像及びp偏光画像の所定領域の画素値、及び、該所定領域に路面に反射した車両ライトが映っているか否かを示す情報との組を、学習手段が機械学習することで生成したものである、ことを特徴とする請求項2記載の車両認識装置。
【請求項4】
前記学習手段はサポートベクターマシンである、ことを特徴とする請求項3記載の車両認識装置。
【請求項5】
前記識別関数は、路面に反射した車両ライトが映ったs偏光画像及びp偏光画像の前記画素領域のそれぞれの画素値が入力されると"1"を、
路面に反射した車両ライトが映っていないs偏光画像及びp偏光画像の前記画素領域のそれぞれの画素値が入力されると"−1"を出力する、ことを特徴とする請求項4記載の車両認識装置。
【請求項6】
偏光画像作成手段が、撮影手段が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成ステップと、
前記撮影手段が撮影した画像データから輝度画像作成手段が輝度画像を作成する輝度画像作成ステップと、
反射領域検出手段が、s偏光画像及びp偏光画像から、路面に反射した車両ライトが映った画素領域を検出する反射領域検出ステップと、
車両認識手段が、前記画素領域を車両認識の認識対象から除外した前記輝度画像から、前方の車両の光源を認識する車両認識ステップと、
を有することを特徴とする車両認識方法。
【請求項7】
前記反射領域検出手段は、同じ画素位置のs偏光画像及びp偏光画像の画素又は複数の画素の画素値をそれぞれ識別関数に入力して、画素又は複数の画素が、車両ライトが映った前記画素領域か否かを判定する、
ことを特徴とする請求項6記載の車両認識方法。
【請求項8】
前記識別関数は、同じ画素位置のs偏光画像及びp偏光画像の所定領域の画素値、及び、該所定領域に路面に反射した車両ライトが映っているか否かを示す情報との組を、学習手段が機械学習することで生成したものである、ことを特徴とする請求項7記載の車両認識方法。
【請求項9】
撮影手段が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成ステップと、
前記撮影手段が撮影した画像データから輝度画像を作成する輝度画像作成ステップと、
s偏光画像及びp偏光画像から、路面に反射した車両ライトが映った画素領域を検出する反射領域検出ステップと、
前記画素領域を車両認識の認識対象から除外した前記輝度画像から、前方の車両の光源を認識する車両認識ステップと、
を実行させるプログラム。
【請求項1】
撮影手段が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成手段と、
前記撮影手段が撮影した画像データから輝度画像を作成する輝度画像作成手段と、
s偏光画像及びp偏光画像から、路面に反射した車両ライトが映った画素領域を検出する反射領域検出手段と、
前記画素領域を車両認識の認識対象から除外した前記輝度画像から、前方の車両の光源を認識する車両認識手段と、
を有することを特徴とする車両認識装置。
【請求項2】
前記反射領域検出手段は、同じ画素位置のs偏光画像及びp偏光画像の画素又は複数の画素の画素値をそれぞれ識別関数に入力して、画素又は複数の画素が、車両ライトが映った前記画素領域か否かを判定する、
ことを特徴とする請求項1記載の車両認識装置。
【請求項3】
前記識別関数は、
同じ画素位置のs偏光画像及びp偏光画像の所定領域の画素値、及び、該所定領域に路面に反射した車両ライトが映っているか否かを示す情報との組を、学習手段が機械学習することで生成したものである、ことを特徴とする請求項2記載の車両認識装置。
【請求項4】
前記学習手段はサポートベクターマシンである、ことを特徴とする請求項3記載の車両認識装置。
【請求項5】
前記識別関数は、路面に反射した車両ライトが映ったs偏光画像及びp偏光画像の前記画素領域のそれぞれの画素値が入力されると"1"を、
路面に反射した車両ライトが映っていないs偏光画像及びp偏光画像の前記画素領域のそれぞれの画素値が入力されると"−1"を出力する、ことを特徴とする請求項4記載の車両認識装置。
【請求項6】
偏光画像作成手段が、撮影手段が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成ステップと、
前記撮影手段が撮影した画像データから輝度画像作成手段が輝度画像を作成する輝度画像作成ステップと、
反射領域検出手段が、s偏光画像及びp偏光画像から、路面に反射した車両ライトが映った画素領域を検出する反射領域検出ステップと、
車両認識手段が、前記画素領域を車両認識の認識対象から除外した前記輝度画像から、前方の車両の光源を認識する車両認識ステップと、
を有することを特徴とする車両認識方法。
【請求項7】
前記反射領域検出手段は、同じ画素位置のs偏光画像及びp偏光画像の画素又は複数の画素の画素値をそれぞれ識別関数に入力して、画素又は複数の画素が、車両ライトが映った前記画素領域か否かを判定する、
ことを特徴とする請求項6記載の車両認識方法。
【請求項8】
前記識別関数は、同じ画素位置のs偏光画像及びp偏光画像の所定領域の画素値、及び、該所定領域に路面に反射した車両ライトが映っているか否かを示す情報との組を、学習手段が機械学習することで生成したものである、ことを特徴とする請求項7記載の車両認識方法。
【請求項9】
撮影手段が撮影した画像データからs偏光画像及びp偏光画像を作成する偏光画像作成ステップと、
前記撮影手段が撮影した画像データから輝度画像を作成する輝度画像作成ステップと、
s偏光画像及びp偏光画像から、路面に反射した車両ライトが映った画素領域を検出する反射領域検出ステップと、
前記画素領域を車両認識の認識対象から除外した前記輝度画像から、前方の車両の光源を認識する車両認識ステップと、
を実行させるプログラム。
【図1】



【図2】
【図3】
【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−92975(P2013−92975A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−235918(P2011−235918)
【出願日】平成23年10月27日(2011.10.27)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月27日(2011.10.27)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]