
車両誘導装置および車両誘導方法
【課題】道路に沿って設けられた多数の発光体の発光を任意のパターンで制御することにより交通状況に応じた車両誘導ができる車両誘導装置および車両誘導方法を提供する。
【解決手段】車両誘導装置1は所定の間隔で道路9に沿って配設される複数の発光体4と、発光体4の発光パターンを生成し、発光パターンの直列データと発光タイミング信号とを送信する主制御部2と、主制御部2からの直列データを並列データに変換し、並列データの各ビットに対応する各発光体4を発光タイミング信号に基づいて駆動する発光制御部3とを備えることを特徴とする。交通状況に対応する最適な発光パターンを主制御部2で一括生成し、これにより多数の発光体4の発光を制御することができる。また、主制御部2および発光制御部3を異なる場所に設け、発光体4に近い位置に発光制御部3を設置することができ、配線を少なくし、施工を容易にすることができる。
【解決手段】車両誘導装置1は所定の間隔で道路9に沿って配設される複数の発光体4と、発光体4の発光パターンを生成し、発光パターンの直列データと発光タイミング信号とを送信する主制御部2と、主制御部2からの直列データを並列データに変換し、並列データの各ビットに対応する各発光体4を発光タイミング信号に基づいて駆動する発光制御部3とを備えることを特徴とする。交通状況に対応する最適な発光パターンを主制御部2で一括生成し、これにより多数の発光体4の発光を制御することができる。また、主制御部2および発光制御部3を異なる場所に設け、発光体4に近い位置に発光制御部3を設置することができ、配線を少なくし、施工を容易にすることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は車両誘導装置および車両誘導方法に関し、詳しくは、道路に沿って設けられた多数の発光体の発光を任意のパターンで制御することにより交通状況に応じた車両誘導ができる車両誘導装置および車両誘導方法に関する。
【背景技術】
【0002】
近年、道路沿いに間隔を開けて複数の発光体を設置し、走行する車両に対して走行速度や走行方向を適切にするように促す車両誘導装置が知られている。例えば、入力信号に関連付けられた複数種の点灯パターンで点灯可能な複数の誘導標を設け、制御手段によってその複数の誘導標を駆動制御する視線誘導装置が開示されている(特許文献1を参照)。
また、車両速度を変化させ得る地点に設置される車両誘導装置として、その変化地点を通過する前後の走行速度の差に基づいて、道路に沿って設置された複数の発光体の発光が走行方向に流れていく発光速度を設定することによって、運転者に元の速度に復帰するように誘導を図る車両誘導装置が開示されている(特許文献2を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−240018号公報
【特許文献2】特開2009−13685号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に開示された視線誘導装置においては、各誘導標(発光体)の表示図形が予め数種類に設定されており、そのいずれの表示とするかが各誘導標に供給する電流の波形で指定される。そのため、複数の発光体の発光を同期させ、正確なタイミングで制御することが困難であるという問題がある。また、複数の発光体による発光パターンを任意に設定したり変化させたりすることができないため、交通状況、周囲の明るさなどに応じて発光パターンや発光の速さ、発光体の輝度などを任意に制御することができないという問題がある。
また、特許文献2に開示された車両誘導装置では、1つのコントローラから各発光体に信号線を配線して、その信号線を介して各発光体に発光指令を送信するため、多数の信号線を配線しなければならず施工が困難であるという問題がある。また、1地点の前後において検出した走行車両の速度差に基づいて決定した一定の速さで発光体の発光が流れていくように制御されるため、多様な交通状況に応じて発光パターンを変えたり、発光体の設置区間中で誘導する速度を変えたりすることはできない。例えば、前方に渋滞が発生している場合には車両を減速するように促し、車両が過度に低速化しているため渋滞が発生する可能性がある場合には加速するように促す、というようなきめ細かな誘導を行うことが困難であった。
さらに、上記従来技術のいずれにおいても、多数の発光体を備える場合の構成や制御については考察されていない。道路上の走行車両をより効果的に誘導するには、道路に沿って設置する発光体の数を多くして、車両を誘導する区間を長くすることが好ましい。しかし、より長い誘導区間に多数の発光体を設けようとすると、その発光体を制御するための配線数が増え、かつ配線長が長くなって施工が困難になる。また、長距離の信号伝送に伴って、すべての発光体を同期させて所定の発光パターンにより発光させることが困難になるという問題が生じる。
【0005】
本発明は、上記現状に鑑みてなされたもので、道路に沿って設けられた多数の発光体の発光を任意の発光パターンで制御することにより、交通状況に応じたきめ細かな車両誘導を可能にする車両誘導装置および車両誘導方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、以下のとおりである。
1.所定の間隔で道路に沿って配設される複数の発光体と、
前記複数の発光体の発光パターンを生成し、該発光パターンの直列データと発光タイミング信号とを送信する主制御部と、
前記主制御部から受信した発光パターンの直列データを並列データに変換し、該並列データの各ビットに対応する各前記発光体を該主制御部から受信した前記発光タイミング信号に基づいて駆動する発光制御部と、
を備えることを特徴とする車両誘導装置。
2.車両の走行速度を計測する1または2以上の車両センサをさらに備え、
前記主制御部は、前記車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた前記発光パターンを生成する前記1.記載の車両誘導装置。
3.前記主制御部は輝度制御信号を前記発光制御部へ送信し、該発光制御部は該輝度制御信号を用いて各前記発光体の輝度を変化させる前記1.または前記2.に記載の車両誘導装置。
4.前記複数の発光体は所定の区間ごとにグループ化され、各該グループに1つの前記発光制御部を備えており、
各前記発光制御部は前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の前記発光制御部に順次伝送する前記1.乃至3.のいずれかに記載の車両誘導装置。
5.前記主制御部は、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、
速度超過と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と逆向きとし、速度低下と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と同じ向きとする前記2.乃至4.のいずれかに記載の車両誘導装置。
6.周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上をさらに備え、
前記主制御部は、前記照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する前記3.乃至5.のいずれかに記載の車両誘導装置。
7.所定の間隔で道路に沿って配設される複数の発光体と、該複数の発光体を並列に接続した発光制御部と、該発光制御部と直列通信により結ばれた主制御部と、を備えた車両誘導装置を用いる車両誘導方法であって、
前記主制御部により、前記複数の発光体の発光パターンを生成して該発光パターンの直列データを前記発光制御部に送信するデータ送信ステップと、
前記主制御部により、前記複数の発光体の発光状態の更新を指示する発光タイミング信号を生成して前記発光制御部に送信する発光タイミング送信ステップと、
前記発光制御部により、前記データ送信ステップで送信された発光パターンの直列データを受信して並列データに変換する直並列変換ステップと、
前記発光制御部により、前記発光タイミング送信ステップで送信された前記発光タイミング信号を受信したとき、前記並列データに対応して各前記発光体を駆動する発光制御ステップと、
を備えることを特徴とする車両誘導方法。
8.前記車両誘導装置は車両の走行速度を計測する1または2以上の車両センサをさらに備え、
前記データ送信ステップは、前記車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた前記発光パターンを生成する前記7.記載の車両誘導方法。
9.前記主制御部により、輝度制御信号を前記発光制御部へ送信し、
前記発光制御ステップは、前記輝度制御信号を用いて各前記発光体の輝度を変化させる前記7.または前記8.に記載の車両誘導方法。
10.前記複数の発光体は所定の区間ごとにグループ化され、各該グループに1つの前記発光制御部を備えており、
各前記発光制御部は前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の前記発光制御部に順次伝送する前記7.乃至9.のいずれかに記載の車両誘導方法。
11.前記データ送信ステップは、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、
速度超過と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と逆向きとし、速度低下と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と同じ向きと定める前記8.乃至10.のいずれかに記載の車両誘導方法。
12.周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上をさらに備え、
前記主制御部は、前記照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する前記9.乃至11.のいずれかに記載の車両誘導方法。
【発明の効果】
【0007】
本発明の車両誘導装置によれば、所定の間隔で道路に沿って配設される複数の発光体を備え、主制御部で発光体の発光パターンを生成してその直列データを発光制御部に送信し、発光制御部は受信した直列データを並列データに変換してその各ビットにそれぞれ対応する各発光体を駆動するため、主制御部において把握した交通状況に対応する最適な発光パターンを一括して生成することができ、その発光パターンに基づいて発光制御部により多数の発光体の発光を制御することができる。また、主制御部および発光制御部を異なる場所に設けることができ、発光体に近い位置に発光制御部を設置することができるため、配線を少なくし、施工を容易にすることができる。さらに、発光パターンは主制御部から発光制御部へ直列伝送されるため、並列伝送よりも簡単で伝送特性に優れた送受信回路を用いて、車両を誘導する区間(誘導区間)にわたる安定した信号伝送が可能になる。また、発光制御部はシフトレジスタなどを使用して簡単に構成することができる。しかも、発光タイミング信号が主制御部から発光制御部へ送られるため、誘導区間内の多数の発光体を正確に同期させ、発光パターンに基づいて発光体ごとに発光を制御することができる。
上記構成によって、本車両誘導装置は多数の発光体の発光を任意の発光パターンで制御することができ、誘導区間およびその先の交通状況に応じたきめ細かい車両誘導を可能にする。すなわち、走行車両の速度や渋滞などの交通状況に対応して発光パターンを変えたり、誘導する速度を変えたりすることができる。例えば、前方に渋滞が発生している場合には車両を減速するように促す発光パターンとし、車両が過度に低速化しているため渋滞が発生する可能性がある場合には加速するように促す発光パターンとすることができる。
【0008】
道路を走行する車両の走行速度を計測する1または2以上の車両センサをさらに備え、前記主制御部が、車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた発光パターンを生成する場合は、車両の走行速度に応じた発光パターンと発光間隔を設定することができ、走行車両を望ましい速度に誘導することが可能になる。
前記主制御部が輝度制御信号を前記発光制御部へ送信し、発光制御部は輝度制御信号を用いて各前記発光体の輝度を変化させる場合は、時間帯や周囲の明るさ、気象などの条件に応じて発光体の輝度を一括して主制御部で設定することができ、1つの信号線で発光制御部へ送信することができる。これにより、発光制御部では特別な制御処理をすることなく、多数の発光体の輝度を変化させることができる。
前記複数の発光体が所定の区間ごとにグループ化され、各グループに1つの前記発光制御部を備えており、各発光制御部が前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の発光制御部に順次伝送する場合は、長い誘導区間を複数のグループに分けて多数の発光体を設けることができる。また、そのグループごとに最適な発光パターンを適用することが可能になる。そして、各グループに属する発光体に近い位置に発光制御部を配設することができるため、発光体への配線長を短くして施工を容易にすることができる。また、1つの主制御部から順に複数の同じ構成の発光制御部が直列に接続され、発光パターンのデータなどが順次直列に伝搬されるため、各部の構成や制御方法を変更することなく多数の発光体の発光を正確に制御することができる。また、誘導区間の距離や発光体の数が変化しても、発光制御部の数を適宜増減することにより対応することができる。
【0009】
前記主制御部が、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、速度超過と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と逆向きとし、速度低下と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と同じ向きとすれば、発光点の移動によるベクション(視覚誘導自己運動感覚)刺激を車両の運転者に与えて、適切な走行速度で走行するように誘導することができる。すなわち、速度超過の場合には速度を抑制するよう誘導し、過度の速度低下の場合には速度を高めて渋滞が発生しないように誘導することができる。
周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上を備え、前記主制御部は、照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する場合は、周囲の明るさや気象状況による視程の変化などに対応して、適切な輝度で発光するように主制御部から多数の発光体に対して制御することができる。
【0010】
本発明の車両誘導方法によれば、所定の間隔で道路に沿って配設される複数の発光体と、その複数の発光体を並列に接続した発光制御部と、発光制御部と直列通信により結ばれた主制御部と、を備えた車両誘導装置を用いて、主制御部により複数の発光体の発光パターンを生成してその直列データを発光制御部に送信するデータ送信ステップと、主制御部により複数の発光体の発光状態の更新を指示する発光タイミング信号を生成して発光制御部に送信する発光タイミング送信ステップと、発光制御部により前記データ送信ステップで送信された発光パターンの直列データを受信して並列データに変換する直並列変換ステップと、発光制御部により前記発光タイミング送信ステップで送信された発光タイミング信号を受信したとき、前記並列データに対応して各発光体を駆動する発光制御ステップと、を備えるため、データ送信ステップにより交通状況に対応する最適な発光パターンを一括して生成して送信することができ、その発光パターンに基づいて多数の発光体の発光を制御することができる。
また、データ送信ステップにより送信された発光パターンの直列データは直並列変換ステップにより並列データに変換され、さらに発光タイミング送信ステップにより送信された発光タイミング信号を受信したとき、発光制御ステップにより前記並列データの各ビットに対応して各発光体が駆動されるため、多数の発光体を正確に同期させ、発光体ごとに発光パターンに基づいたタイミングにより発光を制御することができる。発光パターンは直列伝送されるため、並列伝送よりも簡単で伝送特性に優れた通信線を用いて、誘導区間が長距離にわたっても安定した信号伝送が可能になる。
上記構成によって、本車両誘導方法は多数の発光体の発光を任意の発光パターンで制御することができ、誘導区間およびその先の交通状況に応じたきめ細かい車両誘導を可能にする。すなわち、走行車両の速度や渋滞などの交通状況に対応して発光パターンを変えたり、誘導する速度を変えたりすることができる。例えば、前方に渋滞が発生している場合には車両を減速するように促す発光パターンとし、車両が過度に低速化しているため渋滞が発生する可能性がある場合には加速するように促す発光パターンとすることができる。
【0011】
前記車両誘導装置が車両の走行速度を計測する1または2以上の車両センサを備え、前記データ送信ステップが、車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた発光パターンを生成する場合は、車両の走行速度に応じた発光パターンと発光間隔を設定することができ、走行車両を望ましい速度に誘導することが可能になる。
前記主制御部により、輝度制御信号を前記発光制御部へ送信し、前記発光制御ステップが、輝度制御信号を用いて各前記発光体の輝度を変化させる場合は、時間帯や周囲の明るさ、気象などの条件に応じて発光体の輝度を一括して発光制御ステップで設定することができ、発光制御部へ送信することができる。これにより、発光制御ステップでは特別な制御処理をすることなく、多数の発光体の輝度を同じ輝度に変化させることができる。
前記複数の発光体が所定の区間ごとにグループ化され、各グループに1つの前記発光制御部を備えており、各発光制御部が前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の発光制御部に順次伝送する場合は、長い誘導区間を複数のグループに分けて多数の発光体を設けることができ、前記発光制御ステップにおいてそのグループごとに最適な発光パターンを設定することができる。そして、各グループに属する発光体に近い位置に発光制御部を配設することができるため、発光体への配線長を短くして施工を容易にすることができる。また、1つの主制御部から順に複数の同じ構成の発光制御部が直列に接続され、発光パターンのデータなどが順次直列に伝搬されるため、各部および各ステップの構成や制御方法を変更することなく、多数の発光体の発光を正確に制御することができる。さらに、誘導区間の距離や発光体の数が変化しても、直並列変換ステップおよび発光制御ステップを実行する発光制御部の数を適宜増減することにより対応することができる。
【0012】
前記データ送信ステップが、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、複数の発光体の発光順を決定する場合は、発光点の移動によるベクション刺激を車両の運転者に与えて、適切な走行速度で走行するように誘導することができる。すなわち、速度超過の場合には速度を抑制するよう誘導し、過度の速度低下の場合には速度を高めて渋滞が発生しないように誘導することができる。
周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上を備え、前記主制御部が、照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する場合は、周囲の明るさや気象条件による視程の変化などに対応して、適切な輝度で発光するように多数の発光体に対して制御することができる。
また、霧などによる視程の低下に応じた走行速度で走行するように車両を誘導したり、
全発光体を点滅表示し注意を喚起したりすることができる。
【図面の簡単な説明】
【0013】
【図1】道路沿いに発光体を多数設けた本車両誘導装置の構成を示す模式図である。
【図2】本車両誘導装置の構成を説明するためのブロック図である。
【図3】光点が車両の進行方向に進む発光パターンを示す図である。
【図4】光点が車両の進行方向とは反対向きに進む発光パターンを示す図である。
【図5】その他の発光パターンを示す図である。
【図6】本車両誘導装置および車両誘導方法に用いられる信号のタイミングを例示する図である。
【図7】輝度制御信号の波形を例示するグラフである。
【図8】車両誘導方法の全体の流れを示すフローチャートである。
【図9】車両誘導方法のデータ送信処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0014】
ここでは、車両誘導装置の構成、動作、車両誘導処理の順に、図1〜9を参照しながら本発明の車両誘導装置および車両誘導方法の実施の形態について説明する。
【0015】
1.車両誘導装置の構成
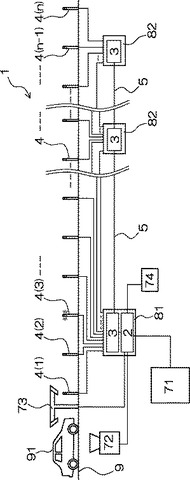
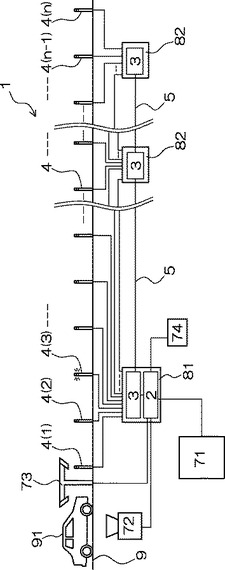
図1は本実施形態にかかる車両誘導装置の構成図である。車両誘導装置1は、主制御部2および第1の発光制御部3を具備する主制御装置81と、第1の発光制御部3と同じ構成の発光制御部3をそれぞれ備える複数の副制御装置82とを備えて構成することができ、主制御装置81と各副制御装置82は通信線5を用いて順次直列に接続される。そして、各発光制御部3には複数の発光体4が接続される。この複数の発光体4は、車両を誘導する区間(誘導区間)内の道路9に沿って配列されており、誘導区間の始点から終点まで順に各発光制御部3に接続されている。車両誘導装置1は、誘導区間の始点から終点に向かって走行する車両91に対して、複数の発光体4を所定の発光パターンにより発光させることにより速度や方向などの誘導を行うことができる。
ここで、「発光パターン」とは、複数の発光体を発光させる順番である発光順、および各発光体の発光を開始する時期である発光時期(発光タイミング)を含む組み合わせをいう。この発光パターンとして、各発光体の発光を継続する時間である発光時間、発光体の発光状態を更新する周期(発光タイミングの周期であり、以下で「発光サイクル」ともいう。)、発光体の発光時の輝度である発光輝度などを組み合わせることができる。
【0016】
主制御部2には操作部71を接続することができる。操作部71の構成は問わず、例えばパーソナルコンピュータなどを用いることができる。操作部71と主制御部2とはネットワークなどを介して接続されてもよい。操作部71は、発光パターンや発光タイミングの他、本車両誘導装置の種々の条件を設定したり変更したりするために用いられる。例えば、主制御部および発光制御部の動作の有無の設定(システム管理機能)、発光パターンの生成条件、すなわち検知した車両の速度や周囲の照度などにより自動で発光パターンを変化させるか、手動で一定の発光パターンとするかの設定(点灯条件設定機能、手動介入制御機能)、車両誘導装置全体で一つの発光パターンを用いるか、複数の発光体グループにおいて異なる発光パターンを適用するかの設定(連動制御機能、連動/不連動切換機能)、車両誘導装置の各部の状態の取得、他の装置に出力するか否かの設定(機器状態監視機能)、制御/監視履歴機能の設定(アナウンスメント機能)、上位局通信機能の設定(機器監視状態の出力、故障警報出力機能)などを例示することができる。
【0017】
また、主制御部2には、車速などを計測するための車両センサ72、道路9上の視程を計測するための視程センサ73、周囲の明るさを計測するための照度センサ74などを接続することができる。車両センサ72、視程センサ73および照度センサ74は、それぞれ1または2以上備えることができ、設置位置は道路条件や誘導目的に応じて適宜に設定することができる。
車両センサ72は、道路を走行する車両を認識して、その車両の走行速度などを検出するための装置である。このような車両センサ72として、カメラによって道路を走行する車両を撮影して画像認識により走行速度などを算出できるトラフィックカウンタなどを用いることができる。主制御部2は、車両センサ72から得られる情報によって、例えば、車両が検知されたときから発光体の発光を開始し、走行を一定の速度に誘導するために連続して変化する発光パターン、カーブにおいて道路形状に応じた走行速度で車両を誘導するための発光パターンなどを生成することができる。
【0018】
視程センサ73は、道路の見通し距離を計測するための装置であり、視程計などを用いることができる。主制御部2は、例えば霧などによって視程が短くなったとき、車両を安全な速度で誘導するために、光点を車両の走行方向と同方向に移動させる発光パターンを生成することができる。
照度センサ74は、道路周辺の照度を計測するセンサであり、CdSセルやフォトトランジスタ、太陽電池などの感光素子を用いた照度計を例示することができる。主制御部2は、周囲の明るさに合わせて発光体の発光輝度を調節するために照度センサ74による計測値を用いることができる。
【0019】
複数の発光体4は、道路に沿って所定の間隔で配置されるものであり、その数は3以上であれば特に限定されない。多くの場合、数十個から数百個の発光体4を設けることができる。発光体が敷設される間隔は、発光する発光体が順次変わることで光点が移動しているように見せるため、複数の発光体が同時に目視できるような間隔である必要がある。例えば、発光体を1〜5m程度の間隔で設けることができる。発光体の間隔は、道路が直線であるか曲がっているか、平坦であるか峠や谷であるかなどによって、適宜に変更されてもよい。本車両誘導装置では、誘導区間内で発光体の間隔が変更されても、その配置に対応して正確に各発光体の発光を制御し得るからである。
また、発光体は、誘導区間を複数の区間に分けて、その各区間に属する発光体ごとにグループ分けされていてもよい。その場合、1つのグループの発光体を1つの発光制御部3に接続することができる。
【0020】
発光体4は任意の形態とし、任意の場所に配設することができる。例えば、路側や中央分離帯に配設されるポール、道路の側壁面や橋梁の欄干に設けられる発光体、路面に埋め込まれる発光体、トンネルの天井に設けられる発光体、天井からぶら下げる箱体に設けられる発光体などを挙げることができる。
また、発光体4は、通電により点灯するものであればその種類を問わず、例えば、複数の発光ダイオードや電球などからなる発光体を用いることができる。
【0021】
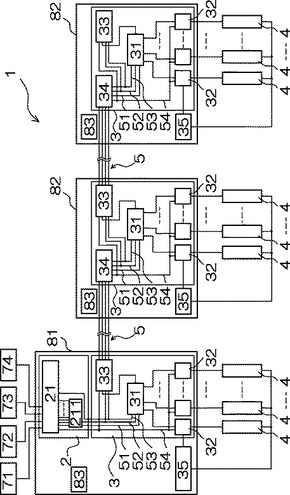
図2は、本実施形態にかかる車両誘導装置1のブロック図である。車両誘導装置1は、主制御部2と発光制御部3とを備える主制御装置81、および発光制御部3を備える副制御装置82を備えている。主制御装置81には発光制御部3を備えず、副制御装置82と接続して構成されてもよい。また、発光体4の数によって、副制御装置82は設けられなくてもよいし、1または2以上の任意の台数が設けられていてもよい。主制御装置81と副制御装置82との間、および1つの副制御装置82とその後段に設けられる副制御装置82との間は、通信線5によって接続されている。
主制御装置81および副制御装置82には、それぞれの内部に電源を供給する電源83、およびそれぞれに接続されている発光体4の電源となる発光体用電源35が備えられている。
【0022】
主制御部2は、マイクロプロセッサなどと周辺回路を用いたコンピュータ21により構成することができる。コンピュータ21には、前記の操作部71、車両センサ72、視程センサ73および照度センサ74などが、直接またはネットワークなどを介して接続される。そして、コンピュータ21は、操作部71から入力された条件やパラメータに基づいて、また車両センサ72、視程センサ73、照度センサ74などによる計測値に応じて、誘導区間内の発光体4の発光パターンを生成する制御プログラムを備える。発光パターンのデータは、すべての発光体4に対して、発光体ごとに点灯(発光)または非点灯(非発光)を指示するデータとなる。例えば発光体4が250台であれば、発光パターンは250ビットからなるデータとなる。さらに、コンピュータ21は直列インターフェース211を具備しており、生成された発光パターンは直列データに変換されて、直列データ信号51として通信線5に送出される。直列データ信号51は、1発光サイクルにつき発光体4の数のビット数を含む信号列である。また、直列インターフェース211は、直列データ信号51の送受信の同期用に、送信クロック信号52を通信線5に送出する。
【0023】
その他、コンピュータ21は、発光タイミング信号53、輝度制御信号54を生成し、それぞれの通信線5に送出するように構成することができる。
発光タイミング信号53は、すべての発光体4を発光パターンに基づいて発光または非発光させるタイミングを与える信号である。
また、輝度制御信号54は、すべての発光体4の輝度を制御するための信号であり、例えば、輝度制御信号54としてパルス幅変調(PWM)信号を使用すれば、そのデューティ比に対応した輝度で発光させることが可能である。
これら直列データ信号51、送信クロック信号52、発光タイミング信号53、輝度制御信号54などは、個別の信号線を備える通信線5で送信してもよいし、任意の形態で重畳や時分割などして1組の通信線で伝送し、受信側で復元するようにしてもよい。
【0024】
発光制御部3は、主制御部2または上流の発光制御部3から送出された各通信線5の信号を受信する受信回路34、直列データ信号51を並列データに変換して保持する直並列変換回路31、および各通信線5の信号を下流の発光制御部3に送出する送信回路33を備えている。受信回路34および送信回路33は、各通信線5の信号を長距離に伝送可能にするためのインターフェース(レベル変換)回路であり、伝送可能な距離および速度が満たされる限り伝送方式は特に限定されない。例えば、EIAで規格化されているRS−422、RS−485などの差動信号を用いるインターフェースを適宜用いることができる。主制御装置81内に主制御部2と発光制御部3とを備える場合には、その間に特に通信インターフェース回路を設ける必要はない。
【0025】
受信回路34で受信された直列データ信号51および送信クロック信号52は、直並列変換回路31に導入される。直並列変換回路31は、当該発光制御部3が受け持っている発光体4に対応するビット列のみを並列データに変換して保持するように構成されている。この直並列変換回路31は、例えばラッチ機能付きのシフトレジスタなどを使用して構成することができる。前記並列データは、1つの発光サイクルの期間保持される。この間に次の発光サイクルのデータを取得可能とするために、直並列変換回路31は2重構成とすることができる。
また、直並列変換回路31は、受信回路34を介して発光タイミング信号53を受信したときに、保持した並列データを駆動回路32に対して出力するように構成することができる。これによって、主制御部2から送信される1つの発光タイミング信号53によって、すべての発光体4の発光状態が一斉に制御されることとなる。
【0026】
1つの発光制御部3の受信回路34で受信された各信号51〜54は、そのまま送信回路33により下流の発光制御部3に送出するように構成することができる。また、直列データ信号51は、上記直並列変換回路31を介して送信回路33に送られるようにしてもよい。
【0027】
直並列変換回路31の出力は駆動回路32に接続されており、各駆動回路32は、それぞれに接続されている発光体4を駆動するように構成される。各発光体4は前記発光体用電源35に接続されているため、駆動回路32は、発光体4への通電をオン、オフするスイッチング素子を用いて構成することができる。これによって、上記発光タイミング信号53を受信した後に直並列変換回路31から出力されている各ビットの値に応じて、発光体4を発光または非発光させることができる。つまり、各発光体4は、発光パターンに対応して発光または非発光が制御されることとなる。
【0028】
さらに、前記輝度制御信号54を備える場合には、受信した輝度制御信号54により駆動回路32の出力を制御するように構成することができる。例えば、輝度制御信号54としてPWM信号を用いる場合は、そのPWM信号を直並列変換回路31から出力されている各ビットデータ「1」(on)の点灯率を制御することにより、容易に発光体4の輝度を制御することができる。
【0029】
2.車両誘導装置の動作
前記のとおり、発光パターンは、複数の発光体4を発光させる順番である発光順、各発光体4の発光時期(タイミング)、各発光体4の発光時間、発光輝度などを組み合わせて設定され、すべての発光体4について、1つの発光サイクルの間、各発光体4が発光しているか否かの発光状態を示す。あるタイミングで発光状態を更新してから、次のタイミングで次の発光状態に更新するまでの期間が1発光サイクルであるから、発光パターンは、複数の連続する発光サイクルについて点灯状態を定めるものとすることができる。その各発光サイクルは、前記発光タイミング信号53によって開始される。1発光サイクルの時間は任意に設定することができ、一定の周期としてもよい。1発光サイクルの間のみ発光する発光体4の発光時間は発光サイクルの周期に等しいが、1つの発光体4を連続する発光サイクルで発光させ続けることもできる。また、発光サイクルの周期は、任意の条件によって変更することができる。例えば、1周期を車両の走行速度に比例した時間としたり、走行速度に反比例した時間としたりすることができる。
【0030】
また、上記発光パターンに従って発光する発光体4の輝度は、前記輝度制御信号54によって任意に変化させることができる。例えば、主制御部2は、照度センサによって道路周囲の照度を計測し、その照度に適した発光体4の輝度を設定することができる。また、視程センサにより道路上の視程を計測し、その視程に応じて発光体4の輝度を設定したり、昼と夜などに対応して発光体の輝度を設定したりすることもできる。
【0031】
発光体4は所定の間隔で道路9に沿って配列されているため、ある発光体4を1発光サイクルの間発光させ、次の発光サイクルで隣接する発光体4を発光させるような発光パターンによって、走行する車両91からは発光点(光点)が移動するように見える。
例えば、誘導区間の発光体4の数nが250であり、誘導区間の始点から終点に向けて発光体番号1から250までが設置されているとする。この場合、図3に示すように、1発光サイクルごとに発光する発光体を1番目、2番目、3番目…250番目と車両の走行方向側へ変えることにより、走行方向側へ光点が移動するように見える。図3に示す発光パターンでは、1番目、5番目、9番目…のように発光体を4の間隔で同時に発光させているが、この光点の間隔は、発光体間の距離や走行車両の間隔などに応じて設定することができる。また、図5に示すように、複数の連続する発光体を同時に発光させてもよい。
その適用例として、車両センサ72を用いて走行車両の走行速度を求め、その速度が当該区間の通常の制限速度よりも過度に遅い(速度低下)と判定した場合には、図3に示したように、光点が走行車両から見て前方側へ移動するようにすることができる。また、その速度低下の程度が大きいときには発光サイクルを速くし、走行車両を制限速度に近づけるために最適な発光パターンを算出するようにすることができる。
【0032】
また、図4に示すように、発光体4の発光を250番目、249番目、248番目…1番目と車両の走行方向と反対向きの順とすることにより、走行する車両からは当該車両に向かって光点が移動するように見える。
その適用例として、車両センサ72を用いて走行車両の走行速度を求め、その速度が当該区間の通常の制限速度よりも過度に速い(速度超過)と判定した場合には、図4に示したように、光点が走行車両側へ繰り返し接近するようにすることができる。また、その速度超過の程度が大きいときには発光サイクルを速くし、車速に応じて走行車両を減速させるために最適な発光パターンを算出するようにすることができる。
【0033】
また、視程センサ73により道路9の視程を計測し、霧が発生するなどして視程が一定値より短くなった場合は、走行車両の速度を抑え安全な速度で車両を誘導して走行させるために、図3に示したように、光点が走行車両側から前方側へ移動する発光パターンを適用することができる。そして、車両センサ72により計測した車両の走行速度と現在の視程で望ましい走行速度との差により、相対的に車両から見た光点の移動速度を適切にするように、発光サイクルを算出することができる。
さらに、突発的な事故など、道路前方に異常がある場合には、図4に示したような走行方向と逆方向に光点を移動させる発光パターンを適用することにより減速を促したり、全発光体4を同時に点滅させる発光パターンとすることにより注意を促したりすることができる。
【0034】
上記のような動作において、誘導区間の全体を1つとして全発光体を1つの発光パターンにより動作させるのではなく、誘導区間を区分して、発光体をその1つずつの区間にグループ分けして動作させることもできる。その場合、発光パターンをグループごとに設定することにより、グループごとに異なる動作をさせることができる。例えば、1つの発光制御部3に40ずつの発光体を接続し、その発光制御部ごとに発光パターンを設定することが可能である。また、区間ごとに車両センサ72を設け、各区間を走行する車両の走行速度に応じた発光パターンにより該当グルーブの発光体を動作させることができる。
【0035】
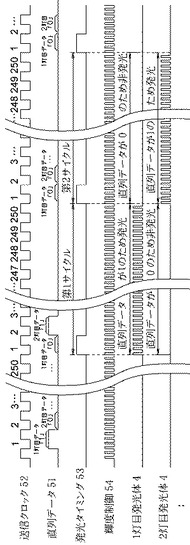
図6は、本車両誘導装置および車両誘導方法に用いられる信号のタイミングを例示する図である。主制御部2は、生成した発光パターンを直列データ信号51として送信するとともに、その受信用に送信クロック信号52を送出する。図6では発光体4の数が250である場合を示しており、直列データ信号51として、その1番目(1灯目)から250番目(250灯目)までの各発光体に対応して発光(「1」)または非発光(「0」)を指示するビット列が順に送出されている。この直列データ信号51は、送信クロック信号52に同期して発光制御部3によって受信される。そして、発光制御部3内の直並列変換回路31に導入されて、各ビットが各発光体に対応する構成の並列データとしてラッチされる。250台の発光体を複数の発光制御部3により制御するように構成されている場合には、上流から下流に向けて直列データ信号51が各発光制御部3に順次伝送され、それぞれが備える直並列変換回路31にラッチされることとなる。
【0036】
主制御部2は、発光体250台すべてに対応する直列データ信号51のビット列を送信すると、発光タイミング信号53を送信する。発光タイミング信号53は、すべての発光制御部3に同時に受信される。この発光タイミング信号53によって直並列変換回路31の出力が有効とされ、各発光体4の対応するビット位置の値が「1」である場合には、その発光体4が駆動回路32によって駆動されて発光する。一方、発光体4の対応するビット位置の値が「0」である場合には、その発光体4は駆動されず非発光となる。この各発光体の状態は、次の発光タイミング信号53が与えられるまでの間すなわち1発光サイクルの間継続される。その発光サイクルの間には、次の発光サイクルの動作のための250台分の直列データ信号51が伝送され、各直並列変換回路31に導入される。各発光サイクルの動作は発光タイミング信号53によって起動されるため、すべての発光体4の発光状態が同期して一斉に更新されることになる。
【0037】
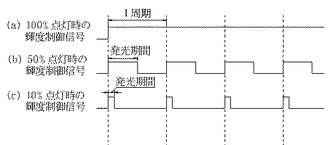
図6に示す動作においては、発光体4の輝度が主制御部2から送出される輝度制御信号54によって制御されている。この輝度制御信号54は、図7に示すようなPWM信号とすることができる。PWM信号のパルス周期は、上記発光サイクルよりも大幅に短い周期とすることができる(例えば、1発光サイクルを60ms程度、PWM信号の周期を1ms程度とすることができる)。そして、発光体を最大輝度で発光させる場合は、図7(a)に示すようにデューティ比を100%とすればよい。また、最小の輝度を最大時の10%とする場合にはデューティ比を10%程度(同図(c))、輝度をその中間にする場合にはデューティ比を50%程度(同図(b))とすればよい。このような輝度制御信号54を前記各ビットの出力信号により変調した信号(例えば、輝度制御信号54と前記各ビットの出力信号との論理積信号など)によって発光体を駆動することにより、発光体4の発光輝度を制御することができる。
【0038】
3.車両誘導方法
以下に、図8および9のフローチャートに沿って、車両誘導装置を用いた車両誘導方法を説明する。車両誘導装置は、前記複数の発光体4と前記主制御部2と発光制御部3とを備えている。そして、本車両誘導方法は、主として主制御部2のコンピュータ21上のプログラムと、主制御部2および発光制御部3上のハードウェアとにより実行することができる。
(1)初期設定
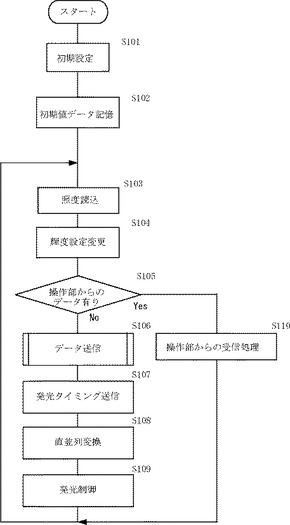
車両誘導方法のプログラムは、図8に示すように、始めに車両誘導方法の初期設定を行う(S101)。初期設定では、車両誘導装置に接続されている発光体4の数、配置、グループ分け、発光体4の発光輝度を変更するときの判断の基準となる道路周辺の照度値、その照度に対応して設定する発光体の輝度、道路の制限速度、発光パターンの初期値、発光パターンの変更条件などを設定する。これらは、コンピュータ21に設けられている設定スイッチや不揮発性メモリなどから読み出すことによって行うことができる。これらの各設定、基準値、条件などのデータはメインメモリに記憶される(S102)。
初期設定の後、以下のステップS103〜ステップS110に示す処理が繰り返し実行される。
【0039】
(2)輝度の設定
道路周囲の照度を計測する照度センサ74や視程を計測する視程センサ73により計測された値を取得し、それらの計測値に応じて、発光体4の発光輝度を制御するための輝度制御信号を生成する。
照度センサ74によって道路の照度を計測して、その計測値を取得する(S103)。このステップS103では、視程センサ73から誘導区間の道路の視程を取得するようにしてもよいし、昼夜を区別するために現在時刻を取得するようにしてもよい。次に、取得した照度、視程および時刻のうちの1つ以上から発光体4の適切な発光輝度を判断し、発光体4をその輝度に制御するための輝度制御信号54の出力を設定する(S104)。輝度制御信号54を所定周期のPWM信号とし、発光輝度に対応したデューティ比により発光体4の輝度を設定することができる。照度がメインメモリに記憶されている基準照度より明るい場合や、視程がメインメモリに記憶されている基準視程より短い場合には、発光体4の発光輝度を高輝度設定とする。また、照度が基準照度より暗い場合や、視程が基準視程より長い場合は低輝度設定とすることができる。輝度制御信号54は、高輝度設定の場合デューティ比を50〜100%、低輝度設定の場合デューティ比を10〜50%などとすることができる。以上によって、発光体4の発光輝度は、視認しやすくて眩しくない程度に設定される。
【0040】
(3)データ送信ステップ
データ送信ステップでは、複数の発光体4の発光パターンを生成して、その発光パターンの直列データを発光制御部3に送信する。まず、操作部71から設定変更指示があるかを確認するようにすることができる(S105)。
このとき、操作部71から設定変更指示がある場合は、操作部から変更データを受信する(S110)。受信した変更データにより、設定されている発光体4の数、配置、グループ分け、発光体4の発光輝度を変更するときの判断の基準となる道路周辺の照度値、その照度に対応して設定する発光体の輝度、道路の制限速度、発光パターンの初期値、発光パターンの変更条件などを変更する。変更した結果は不揮発性メモリやメインメモリなどに記憶し、その後の車両誘導方法の動作を変えることができる。
【0041】
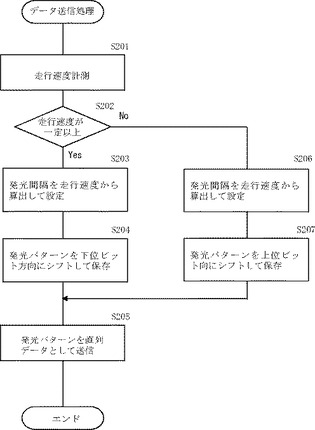
上記ステップS105において操作部71から設定変更指示がなかった場合は、そのまま以下のデータ送信処理を実行する(S106)。そのデータ送信処理を図9に示す。
データ送信ステップでは、まず、車両センサ72により計測された走行速度により、複数の発光体4の発光順、発光時期および発光時間を定める発光パターンを生成する。このため、図9に示すように、車両センサ72によって車両の走行速度を計測し、その計測結果を受信する(S201)。そして、計測された走行速度と、メインメモリに記憶されている制限速度とを比較し、例えば、制限速度以上の場合と、制限速度未満の場合とで異なる処理を行う(S202)。
【0042】
[1]走行速度が制限速度以上のとき(速度超過のとき)
走行速度が制限速度以上のときは、走行速度が速いほど発光体4で発光する光点の移動速度が速くなるように、発光タイミング信号53を出力する間隔(発光サイクル)を算出し、その間隔を設定する(S203)。光点の移動速度が速くなるようにするには、発光サイクルを短くする方法の他、1つの発光体4を連続して発光させる発光サイクル数を減らす方法によってもよい。
そして、図4に示した発光パターンのように、光点が車両の進行方向と逆向きに移動するように1ビット分シフトし、メモリに保存する(S204)。このシフト処理を行うことによって、発光体の発光順を図4に示した発光パターンのように変化させることができる。その後、上記で設定した発光パターンの送信を行う(S205)。
上記ステップS205の発光パターンの送信は、先の発光サイクルのデータの送信終了後に実行される。
【0043】
[2]走行速度が制限速度未満のとき(速度低下のとき)
ステップS202において走行速度が制限速度未満のときは、走行速度が遅いほど発光体4で発光する光点の移動速度が速くなるように、発光タイミング信号53を出力する間隔(発光サイクル)を算出し、その間隔を設定する(S206)。光点の移動速度が速くなるようにするには、発光サイクルを短くする方法の他、1つの発光体4を連続して発光させる発光サイクル数を減らす方法によってもよい。
そして、図3に示した発光パターンのように、光点が車両の進行方向と同じ向きに移動するように1ビット分シフトし、メモリに保存する(S207)。このシフト処理を行うことによって、発光体の発光順を図3に示した発光パターンのように変化させることができる。その後、上記で設定した発光パターンの送信を行う(S205)。
上記ステップS205の発光パターンの送信は、先の発光サイクルのデータの送信終了後に実行される。
【0044】
ステップS205で送信される発光パターンは、直列インターフェース211に出力される。直列インターフェース211は、図6に示したように、送信クロック信号52に合わせて、発光パターンを最下位ビット{図1に示した誘導区間の始点側の発光体4(1)}から最上位ビット{図1に示した誘導区間の終点側の発光体4(n)}までを順に出力することで、全発光体4に対応するビット列の直列データ信号51を発光制御部3に出力する。
【0045】
(3)発光タイミング送信ステップ
データ送信が終わったら、上記ステップS203またはS206で設定された発光サイクルに基づき、図8に示すように発光制御部3に発光タイミング信号53送信する(S107)。これによって、ステップS205で送信された発光パターンによる発光を指示する。
(4)直並列変換ステップ
各発光制御部3は、ステップS205で送信された直列データ信号を直並列変換回路31により、発光体4に対応して各ビットが割り当てられた並列データに変換してラッチする(S108)。この並列データは、当該発光制御部3が受け持つグループの発光体4に対応している。そして、発光タイミング信号53が受信されたときに、発光制御部3が受け持つグループの発光体4に対応する並列データにより、駆動信号を駆動回路32に出力する。
なお、当該発光制御部3が受け持つグループ以外の発光体4に対する直列データは、後段の発光制御部3に伝送される。
【0046】
(5)発光制御ステップ
各駆動回路32は、対応する発光体4の発光制御を行う(S109)。直並列変換回路31からの出力が「0」であるときは、発光体4の通電を行わない。また、出力が「1」のときは、上記ステップS104で設定された輝度制御信号54により発光体4を駆動するようにすることができる。
【0047】
以上の車両誘導方法により、車両の走行速度が所定速度より遅いことを検出した場合は、図3に示したような発光パターンを適用し、光点の移動速度を走行速度より速くして、車両から光点が進行方向側へ離れるように発光体4を発光制御することができる。これによって、車両の運転者に走行速度を速くするようにベクション刺激を与えることができる。また、車両の走行速度が所定速度より速いことを検出した場合は、図4に示したような発光パターンを適用し、光点が進行方向側から車両側へ接近するように発光体4を発光制御することができる。これによって、車両の運転者に走行速度を遅くするようにベクション刺激を与えることができる。
また、発光パターンおよび発光タイミングは1つの主制御部で一括して生成されるため、発光体が多数配設されていても、主制御部の処理のための設定や条件を変更することにより、すべての発光体に対する制御を変更することができる。
【0048】
なお、設定された前記輝度に制御するための処理は、フローチャートに記載する順に限られず、例えば発光タイミング信号の送信後に行ってもよい。また、車両誘導装置が設置されている誘導区間内に複数の車両が走行している場合、任意の条件で発光パターンを選択することができる。例えば、最も優先度の高い条件の車両に対して効果的な発光パターンを用いることができる。
【0049】
なお、本発明においては、以上に示した実施形態に限られず、目的、用途に応じて本発明の範囲内で種々変更した態様とすることができる。例えば、本実施例においては、全発光体4を用いて全体で1種類の発光パターンを適用していたが、これに限られず、任意の範囲ごとに異なる発光パターンを適用することができる。これにより、例えば道路が直線の範囲とカーブした範囲とでは異なる基準で発光パターンを適用することができる。また、車両誘導装置が設置されている誘導区間内を走行する複数の車両に対して、異なる発光パターンを適用することができる。
また、発光パターンは、1ビットずつシフトして次のタイミングの発光パターンを生成していたが、これに限られず、メモリに予め一連の発光パターンを記憶しておき、それを順次読み込んで実行することで、より多彩な発光パターンで発光体を発光させることができる。
【符号の説明】
【0050】
1;車両誘導装置、2;主制御部、21;コンピュータ、211;直列インターフェース、3;発光制御部、31;直並列変換回路(ラッチ付シフトレジスタ)、32;駆動回路、33;送信回路、34;受信回路、35;発光体用電源、4;発光体、5;通信線、51;直列データ信号、52;送信クロック信号、53;発光タイミング信号、54;輝度制御信号、71;操作部、72;車両センサ(トラフィックカウンタ)、73;視程センサ(視程計)、74;照度センサ(照度計)、81;主制御装置、82;副制御装置、9;道路、91;車両。
【技術分野】
【0001】
本発明は車両誘導装置および車両誘導方法に関し、詳しくは、道路に沿って設けられた多数の発光体の発光を任意のパターンで制御することにより交通状況に応じた車両誘導ができる車両誘導装置および車両誘導方法に関する。
【背景技術】
【0002】
近年、道路沿いに間隔を開けて複数の発光体を設置し、走行する車両に対して走行速度や走行方向を適切にするように促す車両誘導装置が知られている。例えば、入力信号に関連付けられた複数種の点灯パターンで点灯可能な複数の誘導標を設け、制御手段によってその複数の誘導標を駆動制御する視線誘導装置が開示されている(特許文献1を参照)。
また、車両速度を変化させ得る地点に設置される車両誘導装置として、その変化地点を通過する前後の走行速度の差に基づいて、道路に沿って設置された複数の発光体の発光が走行方向に流れていく発光速度を設定することによって、運転者に元の速度に復帰するように誘導を図る車両誘導装置が開示されている(特許文献2を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−240018号公報
【特許文献2】特開2009−13685号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に開示された視線誘導装置においては、各誘導標(発光体)の表示図形が予め数種類に設定されており、そのいずれの表示とするかが各誘導標に供給する電流の波形で指定される。そのため、複数の発光体の発光を同期させ、正確なタイミングで制御することが困難であるという問題がある。また、複数の発光体による発光パターンを任意に設定したり変化させたりすることができないため、交通状況、周囲の明るさなどに応じて発光パターンや発光の速さ、発光体の輝度などを任意に制御することができないという問題がある。
また、特許文献2に開示された車両誘導装置では、1つのコントローラから各発光体に信号線を配線して、その信号線を介して各発光体に発光指令を送信するため、多数の信号線を配線しなければならず施工が困難であるという問題がある。また、1地点の前後において検出した走行車両の速度差に基づいて決定した一定の速さで発光体の発光が流れていくように制御されるため、多様な交通状況に応じて発光パターンを変えたり、発光体の設置区間中で誘導する速度を変えたりすることはできない。例えば、前方に渋滞が発生している場合には車両を減速するように促し、車両が過度に低速化しているため渋滞が発生する可能性がある場合には加速するように促す、というようなきめ細かな誘導を行うことが困難であった。
さらに、上記従来技術のいずれにおいても、多数の発光体を備える場合の構成や制御については考察されていない。道路上の走行車両をより効果的に誘導するには、道路に沿って設置する発光体の数を多くして、車両を誘導する区間を長くすることが好ましい。しかし、より長い誘導区間に多数の発光体を設けようとすると、その発光体を制御するための配線数が増え、かつ配線長が長くなって施工が困難になる。また、長距離の信号伝送に伴って、すべての発光体を同期させて所定の発光パターンにより発光させることが困難になるという問題が生じる。
【0005】
本発明は、上記現状に鑑みてなされたもので、道路に沿って設けられた多数の発光体の発光を任意の発光パターンで制御することにより、交通状況に応じたきめ細かな車両誘導を可能にする車両誘導装置および車両誘導方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、以下のとおりである。
1.所定の間隔で道路に沿って配設される複数の発光体と、
前記複数の発光体の発光パターンを生成し、該発光パターンの直列データと発光タイミング信号とを送信する主制御部と、
前記主制御部から受信した発光パターンの直列データを並列データに変換し、該並列データの各ビットに対応する各前記発光体を該主制御部から受信した前記発光タイミング信号に基づいて駆動する発光制御部と、
を備えることを特徴とする車両誘導装置。
2.車両の走行速度を計測する1または2以上の車両センサをさらに備え、
前記主制御部は、前記車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた前記発光パターンを生成する前記1.記載の車両誘導装置。
3.前記主制御部は輝度制御信号を前記発光制御部へ送信し、該発光制御部は該輝度制御信号を用いて各前記発光体の輝度を変化させる前記1.または前記2.に記載の車両誘導装置。
4.前記複数の発光体は所定の区間ごとにグループ化され、各該グループに1つの前記発光制御部を備えており、
各前記発光制御部は前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の前記発光制御部に順次伝送する前記1.乃至3.のいずれかに記載の車両誘導装置。
5.前記主制御部は、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、
速度超過と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と逆向きとし、速度低下と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と同じ向きとする前記2.乃至4.のいずれかに記載の車両誘導装置。
6.周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上をさらに備え、
前記主制御部は、前記照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する前記3.乃至5.のいずれかに記載の車両誘導装置。
7.所定の間隔で道路に沿って配設される複数の発光体と、該複数の発光体を並列に接続した発光制御部と、該発光制御部と直列通信により結ばれた主制御部と、を備えた車両誘導装置を用いる車両誘導方法であって、
前記主制御部により、前記複数の発光体の発光パターンを生成して該発光パターンの直列データを前記発光制御部に送信するデータ送信ステップと、
前記主制御部により、前記複数の発光体の発光状態の更新を指示する発光タイミング信号を生成して前記発光制御部に送信する発光タイミング送信ステップと、
前記発光制御部により、前記データ送信ステップで送信された発光パターンの直列データを受信して並列データに変換する直並列変換ステップと、
前記発光制御部により、前記発光タイミング送信ステップで送信された前記発光タイミング信号を受信したとき、前記並列データに対応して各前記発光体を駆動する発光制御ステップと、
を備えることを特徴とする車両誘導方法。
8.前記車両誘導装置は車両の走行速度を計測する1または2以上の車両センサをさらに備え、
前記データ送信ステップは、前記車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた前記発光パターンを生成する前記7.記載の車両誘導方法。
9.前記主制御部により、輝度制御信号を前記発光制御部へ送信し、
前記発光制御ステップは、前記輝度制御信号を用いて各前記発光体の輝度を変化させる前記7.または前記8.に記載の車両誘導方法。
10.前記複数の発光体は所定の区間ごとにグループ化され、各該グループに1つの前記発光制御部を備えており、
各前記発光制御部は前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の前記発光制御部に順次伝送する前記7.乃至9.のいずれかに記載の車両誘導方法。
11.前記データ送信ステップは、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、
速度超過と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と逆向きとし、速度低下と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と同じ向きと定める前記8.乃至10.のいずれかに記載の車両誘導方法。
12.周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上をさらに備え、
前記主制御部は、前記照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する前記9.乃至11.のいずれかに記載の車両誘導方法。
【発明の効果】
【0007】
本発明の車両誘導装置によれば、所定の間隔で道路に沿って配設される複数の発光体を備え、主制御部で発光体の発光パターンを生成してその直列データを発光制御部に送信し、発光制御部は受信した直列データを並列データに変換してその各ビットにそれぞれ対応する各発光体を駆動するため、主制御部において把握した交通状況に対応する最適な発光パターンを一括して生成することができ、その発光パターンに基づいて発光制御部により多数の発光体の発光を制御することができる。また、主制御部および発光制御部を異なる場所に設けることができ、発光体に近い位置に発光制御部を設置することができるため、配線を少なくし、施工を容易にすることができる。さらに、発光パターンは主制御部から発光制御部へ直列伝送されるため、並列伝送よりも簡単で伝送特性に優れた送受信回路を用いて、車両を誘導する区間(誘導区間)にわたる安定した信号伝送が可能になる。また、発光制御部はシフトレジスタなどを使用して簡単に構成することができる。しかも、発光タイミング信号が主制御部から発光制御部へ送られるため、誘導区間内の多数の発光体を正確に同期させ、発光パターンに基づいて発光体ごとに発光を制御することができる。
上記構成によって、本車両誘導装置は多数の発光体の発光を任意の発光パターンで制御することができ、誘導区間およびその先の交通状況に応じたきめ細かい車両誘導を可能にする。すなわち、走行車両の速度や渋滞などの交通状況に対応して発光パターンを変えたり、誘導する速度を変えたりすることができる。例えば、前方に渋滞が発生している場合には車両を減速するように促す発光パターンとし、車両が過度に低速化しているため渋滞が発生する可能性がある場合には加速するように促す発光パターンとすることができる。
【0008】
道路を走行する車両の走行速度を計測する1または2以上の車両センサをさらに備え、前記主制御部が、車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた発光パターンを生成する場合は、車両の走行速度に応じた発光パターンと発光間隔を設定することができ、走行車両を望ましい速度に誘導することが可能になる。
前記主制御部が輝度制御信号を前記発光制御部へ送信し、発光制御部は輝度制御信号を用いて各前記発光体の輝度を変化させる場合は、時間帯や周囲の明るさ、気象などの条件に応じて発光体の輝度を一括して主制御部で設定することができ、1つの信号線で発光制御部へ送信することができる。これにより、発光制御部では特別な制御処理をすることなく、多数の発光体の輝度を変化させることができる。
前記複数の発光体が所定の区間ごとにグループ化され、各グループに1つの前記発光制御部を備えており、各発光制御部が前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の発光制御部に順次伝送する場合は、長い誘導区間を複数のグループに分けて多数の発光体を設けることができる。また、そのグループごとに最適な発光パターンを適用することが可能になる。そして、各グループに属する発光体に近い位置に発光制御部を配設することができるため、発光体への配線長を短くして施工を容易にすることができる。また、1つの主制御部から順に複数の同じ構成の発光制御部が直列に接続され、発光パターンのデータなどが順次直列に伝搬されるため、各部の構成や制御方法を変更することなく多数の発光体の発光を正確に制御することができる。また、誘導区間の距離や発光体の数が変化しても、発光制御部の数を適宜増減することにより対応することができる。
【0009】
前記主制御部が、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、速度超過と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と逆向きとし、速度低下と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と同じ向きとすれば、発光点の移動によるベクション(視覚誘導自己運動感覚)刺激を車両の運転者に与えて、適切な走行速度で走行するように誘導することができる。すなわち、速度超過の場合には速度を抑制するよう誘導し、過度の速度低下の場合には速度を高めて渋滞が発生しないように誘導することができる。
周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上を備え、前記主制御部は、照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する場合は、周囲の明るさや気象状況による視程の変化などに対応して、適切な輝度で発光するように主制御部から多数の発光体に対して制御することができる。
【0010】
本発明の車両誘導方法によれば、所定の間隔で道路に沿って配設される複数の発光体と、その複数の発光体を並列に接続した発光制御部と、発光制御部と直列通信により結ばれた主制御部と、を備えた車両誘導装置を用いて、主制御部により複数の発光体の発光パターンを生成してその直列データを発光制御部に送信するデータ送信ステップと、主制御部により複数の発光体の発光状態の更新を指示する発光タイミング信号を生成して発光制御部に送信する発光タイミング送信ステップと、発光制御部により前記データ送信ステップで送信された発光パターンの直列データを受信して並列データに変換する直並列変換ステップと、発光制御部により前記発光タイミング送信ステップで送信された発光タイミング信号を受信したとき、前記並列データに対応して各発光体を駆動する発光制御ステップと、を備えるため、データ送信ステップにより交通状況に対応する最適な発光パターンを一括して生成して送信することができ、その発光パターンに基づいて多数の発光体の発光を制御することができる。
また、データ送信ステップにより送信された発光パターンの直列データは直並列変換ステップにより並列データに変換され、さらに発光タイミング送信ステップにより送信された発光タイミング信号を受信したとき、発光制御ステップにより前記並列データの各ビットに対応して各発光体が駆動されるため、多数の発光体を正確に同期させ、発光体ごとに発光パターンに基づいたタイミングにより発光を制御することができる。発光パターンは直列伝送されるため、並列伝送よりも簡単で伝送特性に優れた通信線を用いて、誘導区間が長距離にわたっても安定した信号伝送が可能になる。
上記構成によって、本車両誘導方法は多数の発光体の発光を任意の発光パターンで制御することができ、誘導区間およびその先の交通状況に応じたきめ細かい車両誘導を可能にする。すなわち、走行車両の速度や渋滞などの交通状況に対応して発光パターンを変えたり、誘導する速度を変えたりすることができる。例えば、前方に渋滞が発生している場合には車両を減速するように促す発光パターンとし、車両が過度に低速化しているため渋滞が発生する可能性がある場合には加速するように促す発光パターンとすることができる。
【0011】
前記車両誘導装置が車両の走行速度を計測する1または2以上の車両センサを備え、前記データ送信ステップが、車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた発光パターンを生成する場合は、車両の走行速度に応じた発光パターンと発光間隔を設定することができ、走行車両を望ましい速度に誘導することが可能になる。
前記主制御部により、輝度制御信号を前記発光制御部へ送信し、前記発光制御ステップが、輝度制御信号を用いて各前記発光体の輝度を変化させる場合は、時間帯や周囲の明るさ、気象などの条件に応じて発光体の輝度を一括して発光制御ステップで設定することができ、発光制御部へ送信することができる。これにより、発光制御ステップでは特別な制御処理をすることなく、多数の発光体の輝度を同じ輝度に変化させることができる。
前記複数の発光体が所定の区間ごとにグループ化され、各グループに1つの前記発光制御部を備えており、各発光制御部が前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の発光制御部に順次伝送する場合は、長い誘導区間を複数のグループに分けて多数の発光体を設けることができ、前記発光制御ステップにおいてそのグループごとに最適な発光パターンを設定することができる。そして、各グループに属する発光体に近い位置に発光制御部を配設することができるため、発光体への配線長を短くして施工を容易にすることができる。また、1つの主制御部から順に複数の同じ構成の発光制御部が直列に接続され、発光パターンのデータなどが順次直列に伝搬されるため、各部および各ステップの構成や制御方法を変更することなく、多数の発光体の発光を正確に制御することができる。さらに、誘導区間の距離や発光体の数が変化しても、直並列変換ステップおよび発光制御ステップを実行する発光制御部の数を適宜増減することにより対応することができる。
【0012】
前記データ送信ステップが、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、複数の発光体の発光順を決定する場合は、発光点の移動によるベクション刺激を車両の運転者に与えて、適切な走行速度で走行するように誘導することができる。すなわち、速度超過の場合には速度を抑制するよう誘導し、過度の速度低下の場合には速度を高めて渋滞が発生しないように誘導することができる。
周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上を備え、前記主制御部が、照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する場合は、周囲の明るさや気象条件による視程の変化などに対応して、適切な輝度で発光するように多数の発光体に対して制御することができる。
また、霧などによる視程の低下に応じた走行速度で走行するように車両を誘導したり、
全発光体を点滅表示し注意を喚起したりすることができる。
【図面の簡単な説明】
【0013】
【図1】道路沿いに発光体を多数設けた本車両誘導装置の構成を示す模式図である。
【図2】本車両誘導装置の構成を説明するためのブロック図である。
【図3】光点が車両の進行方向に進む発光パターンを示す図である。
【図4】光点が車両の進行方向とは反対向きに進む発光パターンを示す図である。
【図5】その他の発光パターンを示す図である。
【図6】本車両誘導装置および車両誘導方法に用いられる信号のタイミングを例示する図である。
【図7】輝度制御信号の波形を例示するグラフである。
【図8】車両誘導方法の全体の流れを示すフローチャートである。
【図9】車両誘導方法のデータ送信処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0014】
ここでは、車両誘導装置の構成、動作、車両誘導処理の順に、図1〜9を参照しながら本発明の車両誘導装置および車両誘導方法の実施の形態について説明する。
【0015】
1.車両誘導装置の構成
図1は本実施形態にかかる車両誘導装置の構成図である。車両誘導装置1は、主制御部2および第1の発光制御部3を具備する主制御装置81と、第1の発光制御部3と同じ構成の発光制御部3をそれぞれ備える複数の副制御装置82とを備えて構成することができ、主制御装置81と各副制御装置82は通信線5を用いて順次直列に接続される。そして、各発光制御部3には複数の発光体4が接続される。この複数の発光体4は、車両を誘導する区間(誘導区間)内の道路9に沿って配列されており、誘導区間の始点から終点まで順に各発光制御部3に接続されている。車両誘導装置1は、誘導区間の始点から終点に向かって走行する車両91に対して、複数の発光体4を所定の発光パターンにより発光させることにより速度や方向などの誘導を行うことができる。
ここで、「発光パターン」とは、複数の発光体を発光させる順番である発光順、および各発光体の発光を開始する時期である発光時期(発光タイミング)を含む組み合わせをいう。この発光パターンとして、各発光体の発光を継続する時間である発光時間、発光体の発光状態を更新する周期(発光タイミングの周期であり、以下で「発光サイクル」ともいう。)、発光体の発光時の輝度である発光輝度などを組み合わせることができる。
【0016】
主制御部2には操作部71を接続することができる。操作部71の構成は問わず、例えばパーソナルコンピュータなどを用いることができる。操作部71と主制御部2とはネットワークなどを介して接続されてもよい。操作部71は、発光パターンや発光タイミングの他、本車両誘導装置の種々の条件を設定したり変更したりするために用いられる。例えば、主制御部および発光制御部の動作の有無の設定(システム管理機能)、発光パターンの生成条件、すなわち検知した車両の速度や周囲の照度などにより自動で発光パターンを変化させるか、手動で一定の発光パターンとするかの設定(点灯条件設定機能、手動介入制御機能)、車両誘導装置全体で一つの発光パターンを用いるか、複数の発光体グループにおいて異なる発光パターンを適用するかの設定(連動制御機能、連動/不連動切換機能)、車両誘導装置の各部の状態の取得、他の装置に出力するか否かの設定(機器状態監視機能)、制御/監視履歴機能の設定(アナウンスメント機能)、上位局通信機能の設定(機器監視状態の出力、故障警報出力機能)などを例示することができる。
【0017】
また、主制御部2には、車速などを計測するための車両センサ72、道路9上の視程を計測するための視程センサ73、周囲の明るさを計測するための照度センサ74などを接続することができる。車両センサ72、視程センサ73および照度センサ74は、それぞれ1または2以上備えることができ、設置位置は道路条件や誘導目的に応じて適宜に設定することができる。
車両センサ72は、道路を走行する車両を認識して、その車両の走行速度などを検出するための装置である。このような車両センサ72として、カメラによって道路を走行する車両を撮影して画像認識により走行速度などを算出できるトラフィックカウンタなどを用いることができる。主制御部2は、車両センサ72から得られる情報によって、例えば、車両が検知されたときから発光体の発光を開始し、走行を一定の速度に誘導するために連続して変化する発光パターン、カーブにおいて道路形状に応じた走行速度で車両を誘導するための発光パターンなどを生成することができる。
【0018】
視程センサ73は、道路の見通し距離を計測するための装置であり、視程計などを用いることができる。主制御部2は、例えば霧などによって視程が短くなったとき、車両を安全な速度で誘導するために、光点を車両の走行方向と同方向に移動させる発光パターンを生成することができる。
照度センサ74は、道路周辺の照度を計測するセンサであり、CdSセルやフォトトランジスタ、太陽電池などの感光素子を用いた照度計を例示することができる。主制御部2は、周囲の明るさに合わせて発光体の発光輝度を調節するために照度センサ74による計測値を用いることができる。
【0019】
複数の発光体4は、道路に沿って所定の間隔で配置されるものであり、その数は3以上であれば特に限定されない。多くの場合、数十個から数百個の発光体4を設けることができる。発光体が敷設される間隔は、発光する発光体が順次変わることで光点が移動しているように見せるため、複数の発光体が同時に目視できるような間隔である必要がある。例えば、発光体を1〜5m程度の間隔で設けることができる。発光体の間隔は、道路が直線であるか曲がっているか、平坦であるか峠や谷であるかなどによって、適宜に変更されてもよい。本車両誘導装置では、誘導区間内で発光体の間隔が変更されても、その配置に対応して正確に各発光体の発光を制御し得るからである。
また、発光体は、誘導区間を複数の区間に分けて、その各区間に属する発光体ごとにグループ分けされていてもよい。その場合、1つのグループの発光体を1つの発光制御部3に接続することができる。
【0020】
発光体4は任意の形態とし、任意の場所に配設することができる。例えば、路側や中央分離帯に配設されるポール、道路の側壁面や橋梁の欄干に設けられる発光体、路面に埋め込まれる発光体、トンネルの天井に設けられる発光体、天井からぶら下げる箱体に設けられる発光体などを挙げることができる。
また、発光体4は、通電により点灯するものであればその種類を問わず、例えば、複数の発光ダイオードや電球などからなる発光体を用いることができる。
【0021】
図2は、本実施形態にかかる車両誘導装置1のブロック図である。車両誘導装置1は、主制御部2と発光制御部3とを備える主制御装置81、および発光制御部3を備える副制御装置82を備えている。主制御装置81には発光制御部3を備えず、副制御装置82と接続して構成されてもよい。また、発光体4の数によって、副制御装置82は設けられなくてもよいし、1または2以上の任意の台数が設けられていてもよい。主制御装置81と副制御装置82との間、および1つの副制御装置82とその後段に設けられる副制御装置82との間は、通信線5によって接続されている。
主制御装置81および副制御装置82には、それぞれの内部に電源を供給する電源83、およびそれぞれに接続されている発光体4の電源となる発光体用電源35が備えられている。
【0022】
主制御部2は、マイクロプロセッサなどと周辺回路を用いたコンピュータ21により構成することができる。コンピュータ21には、前記の操作部71、車両センサ72、視程センサ73および照度センサ74などが、直接またはネットワークなどを介して接続される。そして、コンピュータ21は、操作部71から入力された条件やパラメータに基づいて、また車両センサ72、視程センサ73、照度センサ74などによる計測値に応じて、誘導区間内の発光体4の発光パターンを生成する制御プログラムを備える。発光パターンのデータは、すべての発光体4に対して、発光体ごとに点灯(発光)または非点灯(非発光)を指示するデータとなる。例えば発光体4が250台であれば、発光パターンは250ビットからなるデータとなる。さらに、コンピュータ21は直列インターフェース211を具備しており、生成された発光パターンは直列データに変換されて、直列データ信号51として通信線5に送出される。直列データ信号51は、1発光サイクルにつき発光体4の数のビット数を含む信号列である。また、直列インターフェース211は、直列データ信号51の送受信の同期用に、送信クロック信号52を通信線5に送出する。
【0023】
その他、コンピュータ21は、発光タイミング信号53、輝度制御信号54を生成し、それぞれの通信線5に送出するように構成することができる。
発光タイミング信号53は、すべての発光体4を発光パターンに基づいて発光または非発光させるタイミングを与える信号である。
また、輝度制御信号54は、すべての発光体4の輝度を制御するための信号であり、例えば、輝度制御信号54としてパルス幅変調(PWM)信号を使用すれば、そのデューティ比に対応した輝度で発光させることが可能である。
これら直列データ信号51、送信クロック信号52、発光タイミング信号53、輝度制御信号54などは、個別の信号線を備える通信線5で送信してもよいし、任意の形態で重畳や時分割などして1組の通信線で伝送し、受信側で復元するようにしてもよい。
【0024】
発光制御部3は、主制御部2または上流の発光制御部3から送出された各通信線5の信号を受信する受信回路34、直列データ信号51を並列データに変換して保持する直並列変換回路31、および各通信線5の信号を下流の発光制御部3に送出する送信回路33を備えている。受信回路34および送信回路33は、各通信線5の信号を長距離に伝送可能にするためのインターフェース(レベル変換)回路であり、伝送可能な距離および速度が満たされる限り伝送方式は特に限定されない。例えば、EIAで規格化されているRS−422、RS−485などの差動信号を用いるインターフェースを適宜用いることができる。主制御装置81内に主制御部2と発光制御部3とを備える場合には、その間に特に通信インターフェース回路を設ける必要はない。
【0025】
受信回路34で受信された直列データ信号51および送信クロック信号52は、直並列変換回路31に導入される。直並列変換回路31は、当該発光制御部3が受け持っている発光体4に対応するビット列のみを並列データに変換して保持するように構成されている。この直並列変換回路31は、例えばラッチ機能付きのシフトレジスタなどを使用して構成することができる。前記並列データは、1つの発光サイクルの期間保持される。この間に次の発光サイクルのデータを取得可能とするために、直並列変換回路31は2重構成とすることができる。
また、直並列変換回路31は、受信回路34を介して発光タイミング信号53を受信したときに、保持した並列データを駆動回路32に対して出力するように構成することができる。これによって、主制御部2から送信される1つの発光タイミング信号53によって、すべての発光体4の発光状態が一斉に制御されることとなる。
【0026】
1つの発光制御部3の受信回路34で受信された各信号51〜54は、そのまま送信回路33により下流の発光制御部3に送出するように構成することができる。また、直列データ信号51は、上記直並列変換回路31を介して送信回路33に送られるようにしてもよい。
【0027】
直並列変換回路31の出力は駆動回路32に接続されており、各駆動回路32は、それぞれに接続されている発光体4を駆動するように構成される。各発光体4は前記発光体用電源35に接続されているため、駆動回路32は、発光体4への通電をオン、オフするスイッチング素子を用いて構成することができる。これによって、上記発光タイミング信号53を受信した後に直並列変換回路31から出力されている各ビットの値に応じて、発光体4を発光または非発光させることができる。つまり、各発光体4は、発光パターンに対応して発光または非発光が制御されることとなる。
【0028】
さらに、前記輝度制御信号54を備える場合には、受信した輝度制御信号54により駆動回路32の出力を制御するように構成することができる。例えば、輝度制御信号54としてPWM信号を用いる場合は、そのPWM信号を直並列変換回路31から出力されている各ビットデータ「1」(on)の点灯率を制御することにより、容易に発光体4の輝度を制御することができる。
【0029】
2.車両誘導装置の動作
前記のとおり、発光パターンは、複数の発光体4を発光させる順番である発光順、各発光体4の発光時期(タイミング)、各発光体4の発光時間、発光輝度などを組み合わせて設定され、すべての発光体4について、1つの発光サイクルの間、各発光体4が発光しているか否かの発光状態を示す。あるタイミングで発光状態を更新してから、次のタイミングで次の発光状態に更新するまでの期間が1発光サイクルであるから、発光パターンは、複数の連続する発光サイクルについて点灯状態を定めるものとすることができる。その各発光サイクルは、前記発光タイミング信号53によって開始される。1発光サイクルの時間は任意に設定することができ、一定の周期としてもよい。1発光サイクルの間のみ発光する発光体4の発光時間は発光サイクルの周期に等しいが、1つの発光体4を連続する発光サイクルで発光させ続けることもできる。また、発光サイクルの周期は、任意の条件によって変更することができる。例えば、1周期を車両の走行速度に比例した時間としたり、走行速度に反比例した時間としたりすることができる。
【0030】
また、上記発光パターンに従って発光する発光体4の輝度は、前記輝度制御信号54によって任意に変化させることができる。例えば、主制御部2は、照度センサによって道路周囲の照度を計測し、その照度に適した発光体4の輝度を設定することができる。また、視程センサにより道路上の視程を計測し、その視程に応じて発光体4の輝度を設定したり、昼と夜などに対応して発光体の輝度を設定したりすることもできる。
【0031】
発光体4は所定の間隔で道路9に沿って配列されているため、ある発光体4を1発光サイクルの間発光させ、次の発光サイクルで隣接する発光体4を発光させるような発光パターンによって、走行する車両91からは発光点(光点)が移動するように見える。
例えば、誘導区間の発光体4の数nが250であり、誘導区間の始点から終点に向けて発光体番号1から250までが設置されているとする。この場合、図3に示すように、1発光サイクルごとに発光する発光体を1番目、2番目、3番目…250番目と車両の走行方向側へ変えることにより、走行方向側へ光点が移動するように見える。図3に示す発光パターンでは、1番目、5番目、9番目…のように発光体を4の間隔で同時に発光させているが、この光点の間隔は、発光体間の距離や走行車両の間隔などに応じて設定することができる。また、図5に示すように、複数の連続する発光体を同時に発光させてもよい。
その適用例として、車両センサ72を用いて走行車両の走行速度を求め、その速度が当該区間の通常の制限速度よりも過度に遅い(速度低下)と判定した場合には、図3に示したように、光点が走行車両から見て前方側へ移動するようにすることができる。また、その速度低下の程度が大きいときには発光サイクルを速くし、走行車両を制限速度に近づけるために最適な発光パターンを算出するようにすることができる。
【0032】
また、図4に示すように、発光体4の発光を250番目、249番目、248番目…1番目と車両の走行方向と反対向きの順とすることにより、走行する車両からは当該車両に向かって光点が移動するように見える。
その適用例として、車両センサ72を用いて走行車両の走行速度を求め、その速度が当該区間の通常の制限速度よりも過度に速い(速度超過)と判定した場合には、図4に示したように、光点が走行車両側へ繰り返し接近するようにすることができる。また、その速度超過の程度が大きいときには発光サイクルを速くし、車速に応じて走行車両を減速させるために最適な発光パターンを算出するようにすることができる。
【0033】
また、視程センサ73により道路9の視程を計測し、霧が発生するなどして視程が一定値より短くなった場合は、走行車両の速度を抑え安全な速度で車両を誘導して走行させるために、図3に示したように、光点が走行車両側から前方側へ移動する発光パターンを適用することができる。そして、車両センサ72により計測した車両の走行速度と現在の視程で望ましい走行速度との差により、相対的に車両から見た光点の移動速度を適切にするように、発光サイクルを算出することができる。
さらに、突発的な事故など、道路前方に異常がある場合には、図4に示したような走行方向と逆方向に光点を移動させる発光パターンを適用することにより減速を促したり、全発光体4を同時に点滅させる発光パターンとすることにより注意を促したりすることができる。
【0034】
上記のような動作において、誘導区間の全体を1つとして全発光体を1つの発光パターンにより動作させるのではなく、誘導区間を区分して、発光体をその1つずつの区間にグループ分けして動作させることもできる。その場合、発光パターンをグループごとに設定することにより、グループごとに異なる動作をさせることができる。例えば、1つの発光制御部3に40ずつの発光体を接続し、その発光制御部ごとに発光パターンを設定することが可能である。また、区間ごとに車両センサ72を設け、各区間を走行する車両の走行速度に応じた発光パターンにより該当グルーブの発光体を動作させることができる。
【0035】
図6は、本車両誘導装置および車両誘導方法に用いられる信号のタイミングを例示する図である。主制御部2は、生成した発光パターンを直列データ信号51として送信するとともに、その受信用に送信クロック信号52を送出する。図6では発光体4の数が250である場合を示しており、直列データ信号51として、その1番目(1灯目)から250番目(250灯目)までの各発光体に対応して発光(「1」)または非発光(「0」)を指示するビット列が順に送出されている。この直列データ信号51は、送信クロック信号52に同期して発光制御部3によって受信される。そして、発光制御部3内の直並列変換回路31に導入されて、各ビットが各発光体に対応する構成の並列データとしてラッチされる。250台の発光体を複数の発光制御部3により制御するように構成されている場合には、上流から下流に向けて直列データ信号51が各発光制御部3に順次伝送され、それぞれが備える直並列変換回路31にラッチされることとなる。
【0036】
主制御部2は、発光体250台すべてに対応する直列データ信号51のビット列を送信すると、発光タイミング信号53を送信する。発光タイミング信号53は、すべての発光制御部3に同時に受信される。この発光タイミング信号53によって直並列変換回路31の出力が有効とされ、各発光体4の対応するビット位置の値が「1」である場合には、その発光体4が駆動回路32によって駆動されて発光する。一方、発光体4の対応するビット位置の値が「0」である場合には、その発光体4は駆動されず非発光となる。この各発光体の状態は、次の発光タイミング信号53が与えられるまでの間すなわち1発光サイクルの間継続される。その発光サイクルの間には、次の発光サイクルの動作のための250台分の直列データ信号51が伝送され、各直並列変換回路31に導入される。各発光サイクルの動作は発光タイミング信号53によって起動されるため、すべての発光体4の発光状態が同期して一斉に更新されることになる。
【0037】
図6に示す動作においては、発光体4の輝度が主制御部2から送出される輝度制御信号54によって制御されている。この輝度制御信号54は、図7に示すようなPWM信号とすることができる。PWM信号のパルス周期は、上記発光サイクルよりも大幅に短い周期とすることができる(例えば、1発光サイクルを60ms程度、PWM信号の周期を1ms程度とすることができる)。そして、発光体を最大輝度で発光させる場合は、図7(a)に示すようにデューティ比を100%とすればよい。また、最小の輝度を最大時の10%とする場合にはデューティ比を10%程度(同図(c))、輝度をその中間にする場合にはデューティ比を50%程度(同図(b))とすればよい。このような輝度制御信号54を前記各ビットの出力信号により変調した信号(例えば、輝度制御信号54と前記各ビットの出力信号との論理積信号など)によって発光体を駆動することにより、発光体4の発光輝度を制御することができる。
【0038】
3.車両誘導方法
以下に、図8および9のフローチャートに沿って、車両誘導装置を用いた車両誘導方法を説明する。車両誘導装置は、前記複数の発光体4と前記主制御部2と発光制御部3とを備えている。そして、本車両誘導方法は、主として主制御部2のコンピュータ21上のプログラムと、主制御部2および発光制御部3上のハードウェアとにより実行することができる。
(1)初期設定
車両誘導方法のプログラムは、図8に示すように、始めに車両誘導方法の初期設定を行う(S101)。初期設定では、車両誘導装置に接続されている発光体4の数、配置、グループ分け、発光体4の発光輝度を変更するときの判断の基準となる道路周辺の照度値、その照度に対応して設定する発光体の輝度、道路の制限速度、発光パターンの初期値、発光パターンの変更条件などを設定する。これらは、コンピュータ21に設けられている設定スイッチや不揮発性メモリなどから読み出すことによって行うことができる。これらの各設定、基準値、条件などのデータはメインメモリに記憶される(S102)。
初期設定の後、以下のステップS103〜ステップS110に示す処理が繰り返し実行される。
【0039】
(2)輝度の設定
道路周囲の照度を計測する照度センサ74や視程を計測する視程センサ73により計測された値を取得し、それらの計測値に応じて、発光体4の発光輝度を制御するための輝度制御信号を生成する。
照度センサ74によって道路の照度を計測して、その計測値を取得する(S103)。このステップS103では、視程センサ73から誘導区間の道路の視程を取得するようにしてもよいし、昼夜を区別するために現在時刻を取得するようにしてもよい。次に、取得した照度、視程および時刻のうちの1つ以上から発光体4の適切な発光輝度を判断し、発光体4をその輝度に制御するための輝度制御信号54の出力を設定する(S104)。輝度制御信号54を所定周期のPWM信号とし、発光輝度に対応したデューティ比により発光体4の輝度を設定することができる。照度がメインメモリに記憶されている基準照度より明るい場合や、視程がメインメモリに記憶されている基準視程より短い場合には、発光体4の発光輝度を高輝度設定とする。また、照度が基準照度より暗い場合や、視程が基準視程より長い場合は低輝度設定とすることができる。輝度制御信号54は、高輝度設定の場合デューティ比を50〜100%、低輝度設定の場合デューティ比を10〜50%などとすることができる。以上によって、発光体4の発光輝度は、視認しやすくて眩しくない程度に設定される。
【0040】
(3)データ送信ステップ
データ送信ステップでは、複数の発光体4の発光パターンを生成して、その発光パターンの直列データを発光制御部3に送信する。まず、操作部71から設定変更指示があるかを確認するようにすることができる(S105)。
このとき、操作部71から設定変更指示がある場合は、操作部から変更データを受信する(S110)。受信した変更データにより、設定されている発光体4の数、配置、グループ分け、発光体4の発光輝度を変更するときの判断の基準となる道路周辺の照度値、その照度に対応して設定する発光体の輝度、道路の制限速度、発光パターンの初期値、発光パターンの変更条件などを変更する。変更した結果は不揮発性メモリやメインメモリなどに記憶し、その後の車両誘導方法の動作を変えることができる。
【0041】
上記ステップS105において操作部71から設定変更指示がなかった場合は、そのまま以下のデータ送信処理を実行する(S106)。そのデータ送信処理を図9に示す。
データ送信ステップでは、まず、車両センサ72により計測された走行速度により、複数の発光体4の発光順、発光時期および発光時間を定める発光パターンを生成する。このため、図9に示すように、車両センサ72によって車両の走行速度を計測し、その計測結果を受信する(S201)。そして、計測された走行速度と、メインメモリに記憶されている制限速度とを比較し、例えば、制限速度以上の場合と、制限速度未満の場合とで異なる処理を行う(S202)。
【0042】
[1]走行速度が制限速度以上のとき(速度超過のとき)
走行速度が制限速度以上のときは、走行速度が速いほど発光体4で発光する光点の移動速度が速くなるように、発光タイミング信号53を出力する間隔(発光サイクル)を算出し、その間隔を設定する(S203)。光点の移動速度が速くなるようにするには、発光サイクルを短くする方法の他、1つの発光体4を連続して発光させる発光サイクル数を減らす方法によってもよい。
そして、図4に示した発光パターンのように、光点が車両の進行方向と逆向きに移動するように1ビット分シフトし、メモリに保存する(S204)。このシフト処理を行うことによって、発光体の発光順を図4に示した発光パターンのように変化させることができる。その後、上記で設定した発光パターンの送信を行う(S205)。
上記ステップS205の発光パターンの送信は、先の発光サイクルのデータの送信終了後に実行される。
【0043】
[2]走行速度が制限速度未満のとき(速度低下のとき)
ステップS202において走行速度が制限速度未満のときは、走行速度が遅いほど発光体4で発光する光点の移動速度が速くなるように、発光タイミング信号53を出力する間隔(発光サイクル)を算出し、その間隔を設定する(S206)。光点の移動速度が速くなるようにするには、発光サイクルを短くする方法の他、1つの発光体4を連続して発光させる発光サイクル数を減らす方法によってもよい。
そして、図3に示した発光パターンのように、光点が車両の進行方向と同じ向きに移動するように1ビット分シフトし、メモリに保存する(S207)。このシフト処理を行うことによって、発光体の発光順を図3に示した発光パターンのように変化させることができる。その後、上記で設定した発光パターンの送信を行う(S205)。
上記ステップS205の発光パターンの送信は、先の発光サイクルのデータの送信終了後に実行される。
【0044】
ステップS205で送信される発光パターンは、直列インターフェース211に出力される。直列インターフェース211は、図6に示したように、送信クロック信号52に合わせて、発光パターンを最下位ビット{図1に示した誘導区間の始点側の発光体4(1)}から最上位ビット{図1に示した誘導区間の終点側の発光体4(n)}までを順に出力することで、全発光体4に対応するビット列の直列データ信号51を発光制御部3に出力する。
【0045】
(3)発光タイミング送信ステップ
データ送信が終わったら、上記ステップS203またはS206で設定された発光サイクルに基づき、図8に示すように発光制御部3に発光タイミング信号53送信する(S107)。これによって、ステップS205で送信された発光パターンによる発光を指示する。
(4)直並列変換ステップ
各発光制御部3は、ステップS205で送信された直列データ信号を直並列変換回路31により、発光体4に対応して各ビットが割り当てられた並列データに変換してラッチする(S108)。この並列データは、当該発光制御部3が受け持つグループの発光体4に対応している。そして、発光タイミング信号53が受信されたときに、発光制御部3が受け持つグループの発光体4に対応する並列データにより、駆動信号を駆動回路32に出力する。
なお、当該発光制御部3が受け持つグループ以外の発光体4に対する直列データは、後段の発光制御部3に伝送される。
【0046】
(5)発光制御ステップ
各駆動回路32は、対応する発光体4の発光制御を行う(S109)。直並列変換回路31からの出力が「0」であるときは、発光体4の通電を行わない。また、出力が「1」のときは、上記ステップS104で設定された輝度制御信号54により発光体4を駆動するようにすることができる。
【0047】
以上の車両誘導方法により、車両の走行速度が所定速度より遅いことを検出した場合は、図3に示したような発光パターンを適用し、光点の移動速度を走行速度より速くして、車両から光点が進行方向側へ離れるように発光体4を発光制御することができる。これによって、車両の運転者に走行速度を速くするようにベクション刺激を与えることができる。また、車両の走行速度が所定速度より速いことを検出した場合は、図4に示したような発光パターンを適用し、光点が進行方向側から車両側へ接近するように発光体4を発光制御することができる。これによって、車両の運転者に走行速度を遅くするようにベクション刺激を与えることができる。
また、発光パターンおよび発光タイミングは1つの主制御部で一括して生成されるため、発光体が多数配設されていても、主制御部の処理のための設定や条件を変更することにより、すべての発光体に対する制御を変更することができる。
【0048】
なお、設定された前記輝度に制御するための処理は、フローチャートに記載する順に限られず、例えば発光タイミング信号の送信後に行ってもよい。また、車両誘導装置が設置されている誘導区間内に複数の車両が走行している場合、任意の条件で発光パターンを選択することができる。例えば、最も優先度の高い条件の車両に対して効果的な発光パターンを用いることができる。
【0049】
なお、本発明においては、以上に示した実施形態に限られず、目的、用途に応じて本発明の範囲内で種々変更した態様とすることができる。例えば、本実施例においては、全発光体4を用いて全体で1種類の発光パターンを適用していたが、これに限られず、任意の範囲ごとに異なる発光パターンを適用することができる。これにより、例えば道路が直線の範囲とカーブした範囲とでは異なる基準で発光パターンを適用することができる。また、車両誘導装置が設置されている誘導区間内を走行する複数の車両に対して、異なる発光パターンを適用することができる。
また、発光パターンは、1ビットずつシフトして次のタイミングの発光パターンを生成していたが、これに限られず、メモリに予め一連の発光パターンを記憶しておき、それを順次読み込んで実行することで、より多彩な発光パターンで発光体を発光させることができる。
【符号の説明】
【0050】
1;車両誘導装置、2;主制御部、21;コンピュータ、211;直列インターフェース、3;発光制御部、31;直並列変換回路(ラッチ付シフトレジスタ)、32;駆動回路、33;送信回路、34;受信回路、35;発光体用電源、4;発光体、5;通信線、51;直列データ信号、52;送信クロック信号、53;発光タイミング信号、54;輝度制御信号、71;操作部、72;車両センサ(トラフィックカウンタ)、73;視程センサ(視程計)、74;照度センサ(照度計)、81;主制御装置、82;副制御装置、9;道路、91;車両。
【特許請求の範囲】
【請求項1】
所定の間隔で道路に沿って配設される複数の発光体と、
前記複数の発光体の発光パターンを生成し、該発光パターンの直列データと発光タイミング信号とを送信する主制御部と、
前記主制御部から受信した発光パターンの直列データを並列データに変換し、該並列データの各ビットに対応する各前記発光体を該主制御部から受信した前記発光タイミング信号に基づいて駆動する発光制御部と、
を備えることを特徴とする車両誘導装置。
【請求項2】
車両の走行速度を計測する1または2以上の車両センサをさらに備え、
前記主制御部は、前記車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた前記発光パターンを生成する請求項1記載の車両誘導装置。
【請求項3】
前記主制御部は輝度制御信号を前記発光制御部へ送信し、該発光制御部は該輝度制御信号を用いて各前記発光体の輝度を変化させる請求項1または2に記載の車両誘導装置。
【請求項4】
前記複数の発光体は所定の区間ごとにグループ化され、各該グループに1つの前記発光制御部を備えており、
各前記発光制御部は前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の前記発光制御部に順次伝送する請求項1乃至3のいずれかに記載の車両誘導装置。
【請求項5】
前記主制御部は、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、
速度超過と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と逆向きとし、速度低下と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と同じ向きとする請求項2乃至4のいずれかに記載の車両誘導装置。
【請求項6】
周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上をさらに備え、
前記主制御部は、前記照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する請求項3乃至5のいずれかに記載の車両誘導装置。
【請求項7】
所定の間隔で道路に沿って配設される複数の発光体と、該複数の発光体を並列に接続した発光制御部と、該発光制御部と直列通信により結ばれた主制御部と、を備えた車両誘導装置を用いる車両誘導方法であって、
前記主制御部により、前記複数の発光体の発光パターンを生成して該発光パターンの直列データを前記発光制御部に送信するデータ送信ステップと、
前記主制御部により、前記複数の発光体の発光状態の更新を指示する発光タイミング信号を生成して前記発光制御部に送信する発光タイミング送信ステップと、
前記発光制御部により、前記データ送信ステップで送信された発光パターンの直列データを受信して並列データに変換する直並列変換ステップと、
前記発光制御部により、前記発光タイミング送信ステップで送信された前記発光タイミング信号を受信したとき、前記並列データに対応して各前記発光体を駆動する発光制御ステップと、
を備えることを特徴とする車両誘導方法。
【請求項8】
前記車両誘導装置は車両の走行速度を計測する1または2以上の車両センサをさらに備え、
前記データ送信ステップは、前記車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた前記発光パターンを生成する請求項7記載の車両誘導方法。
【請求項9】
前記主制御部により、輝度制御信号を前記発光制御部へ送信し、
前記発光制御ステップは、前記輝度制御信号を用いて各前記発光体の輝度を変化させる請求項7または8に記載の車両誘導方法。
【請求項10】
前記複数の発光体は所定の区間ごとにグループ化され、各該グループに1つの前記発光制御部を備えており、
各前記発光制御部は前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の前記発光制御部に順次伝送する請求項7乃至9のいずれかに記載の車両誘導方法。
【請求項11】
前記データ送信ステップは、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、
速度超過と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と逆向きとし、速度低下と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と同じ向きと定める請求項8乃至10のいずれかに記載の車両誘導方法。
【請求項12】
周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上をさらに備え、
前記主制御部は、前記照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する請求項9乃至11のいずれかに記載の車両誘導方法。
【請求項1】
所定の間隔で道路に沿って配設される複数の発光体と、
前記複数の発光体の発光パターンを生成し、該発光パターンの直列データと発光タイミング信号とを送信する主制御部と、
前記主制御部から受信した発光パターンの直列データを並列データに変換し、該並列データの各ビットに対応する各前記発光体を該主制御部から受信した前記発光タイミング信号に基づいて駆動する発光制御部と、
を備えることを特徴とする車両誘導装置。
【請求項2】
車両の走行速度を計測する1または2以上の車両センサをさらに備え、
前記主制御部は、前記車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた前記発光パターンを生成する請求項1記載の車両誘導装置。
【請求項3】
前記主制御部は輝度制御信号を前記発光制御部へ送信し、該発光制御部は該輝度制御信号を用いて各前記発光体の輝度を変化させる請求項1または2に記載の車両誘導装置。
【請求項4】
前記複数の発光体は所定の区間ごとにグループ化され、各該グループに1つの前記発光制御部を備えており、
各前記発光制御部は前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の前記発光制御部に順次伝送する請求項1乃至3のいずれかに記載の車両誘導装置。
【請求項5】
前記主制御部は、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、
速度超過と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と逆向きとし、速度低下と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と同じ向きとする請求項2乃至4のいずれかに記載の車両誘導装置。
【請求項6】
周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上をさらに備え、
前記主制御部は、前記照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する請求項3乃至5のいずれかに記載の車両誘導装置。
【請求項7】
所定の間隔で道路に沿って配設される複数の発光体と、該複数の発光体を並列に接続した発光制御部と、該発光制御部と直列通信により結ばれた主制御部と、を備えた車両誘導装置を用いる車両誘導方法であって、
前記主制御部により、前記複数の発光体の発光パターンを生成して該発光パターンの直列データを前記発光制御部に送信するデータ送信ステップと、
前記主制御部により、前記複数の発光体の発光状態の更新を指示する発光タイミング信号を生成して前記発光制御部に送信する発光タイミング送信ステップと、
前記発光制御部により、前記データ送信ステップで送信された発光パターンの直列データを受信して並列データに変換する直並列変換ステップと、
前記発光制御部により、前記発光タイミング送信ステップで送信された前記発光タイミング信号を受信したとき、前記並列データに対応して各前記発光体を駆動する発光制御ステップと、
を備えることを特徴とする車両誘導方法。
【請求項8】
前記車両誘導装置は車両の走行速度を計測する1または2以上の車両センサをさらに備え、
前記データ送信ステップは、前記車両センサにより計測された走行速度により、前記複数の発光体の発光順、発光時期および発光時間を定めた前記発光パターンを生成する請求項7記載の車両誘導方法。
【請求項9】
前記主制御部により、輝度制御信号を前記発光制御部へ送信し、
前記発光制御ステップは、前記輝度制御信号を用いて各前記発光体の輝度を変化させる請求項7または8に記載の車両誘導方法。
【請求項10】
前記複数の発光体は所定の区間ごとにグループ化され、各該グループに1つの前記発光制御部を備えており、
各前記発光制御部は前記主制御部から順に直列接続され、前記発光パターンの直列データ、発光タイミング信号および前記輝度制御信号を後段の前記発光制御部に順次伝送する請求項7乃至9のいずれかに記載の車両誘導方法。
【請求項11】
前記データ送信ステップは、前記車両センサにより計測された走行速度に基づいて速度超過または速度低下を判断し、
速度超過と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と逆向きとし、速度低下と判断した場合には、前記複数の発光体の発光順を前記車両の進行方向と同じ向きと定める請求項8乃至10のいずれかに記載の車両誘導方法。
【請求項12】
周囲の照度を計測する照度センサおよび視程を計測する視程センサのうち1以上をさらに備え、
前記主制御部は、前記照度センサおよび視程センサのうち1以上により計測された値に基づき前記輝度制御信号を生成する請求項9乃至11のいずれかに記載の車両誘導方法。
【図1】


【図2】
【図3】

【図4】

【図5】

【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−2059(P2013−2059A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−131665(P2011−131665)
【出願日】平成23年6月13日(2011.6.13)
【出願人】(000243881)名古屋電機工業株式会社 (107)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月13日(2011.6.13)
【出願人】(000243881)名古屋電機工業株式会社 (107)
【Fターム(参考)】
[ Back to top ]