
車両走行位置推定システム及び車両走行位置推定方法
【課題】マルチパスの影響により計測位置データが誤差を含む場合に、この影響を加味して計測位置データを補正しなくても車両の正確な道路の幅方向の走行位置を推定することができる車両走行位置推定システム及び車両走行位置推定方法を提供する。
【解決手段】通信部403は、路上ビーコン3から通信回線5を介して走行軌跡情報を受信する。走行軌跡解析部404は、走行軌跡解析の処理を実現し、走行軌跡受信情報の計測位置データのばらつきに基づいて、車両100の道路の幅方向の走行位置を推定する。交通情報提供部405は、交通情報提供の処理を実現する。マルチパス判定部406は、リンク−マルチパス対応データ及び車線−ばらつき対応データを作成する。制御部407は、記憶部400、時計部401、GPS処理部402、通信部403、走行軌跡解析部404、交通情報提供部405、マルチパス判定部406の処理を制御する。
【解決手段】通信部403は、路上ビーコン3から通信回線5を介して走行軌跡情報を受信する。走行軌跡解析部404は、走行軌跡解析の処理を実現し、走行軌跡受信情報の計測位置データのばらつきに基づいて、車両100の道路の幅方向の走行位置を推定する。交通情報提供部405は、交通情報提供の処理を実現する。マルチパス判定部406は、リンク−マルチパス対応データ及び車線−ばらつき対応データを作成する。制御部407は、記憶部400、時計部401、GPS処理部402、通信部403、走行軌跡解析部404、交通情報提供部405、マルチパス判定部406の処理を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数のGPS衛星からの受信電波に基づいて車両の位置を推定することができる車両走行位置推定システム及び車両走行位置推定方法に関する。
【背景技術】
【0002】
複数のGPS衛星からの受信電波に基づいて車両の位置を時系列に複数回計測して蓄積し、所定のタイミングで蓄積した計測位置データを交通情報センター装置に送信する車載装置が開示されている。また、この計測位置データを受信する交通情報センター装置が開示されている(特許文献1)。
【特許文献1】特開2005−156308号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
交通情報センター装置において、この受信した計測位置データを解析し、車両の、道路の幅方向の走行位置を特定したうえで、車両が道路上の障害物を避けるために行った車線変更を検出する研究を、発明者らは進めている。
ところで、GPS衛星から送信された電波が建造物等によって反射・回折し、車載装置が複数の経路から同じ電波を受信してしまうことがある。これをマルチパスという。このマルチパスの影響により計測位置データが誤差を含む場合があった。
【0004】
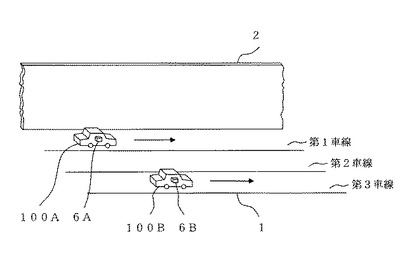
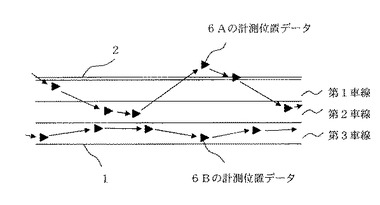
図15、16は、マルチパスの影響を説明するための図である。例えば、高速道路では、図15に示すように道路1からの騒音を防止するための遮蔽板2が道路1に沿って設置されている。この遮蔽板2のためにマルチパスが発生し、遮蔽板2に近い第1車線を走行した車両100Aに搭載した車載装置6Aの計測位置データではマルチパスの影響が大きく、誤差が多い場合、図16に示すように、車載装置6Aの計測位置データは第1車線に沿っておらず、ばらつきが大きい。一方、第3車線を走行した車両100Bに搭載した車載装置6Bの計測位置データはマルチパスの影響が出にくければ、誤差が少なく、図16に示すように、車載装置6Bの計測位置データは第3車線にほぼ沿っており、ばらつきが小さい。
【0005】
計測位置データにマルチパスの影響による誤差が含まれていれば、車両の、道路の幅方向の走行位置を特定できないので、車線変更を正確に検出できないという問題がある。交通情報センター装置において、マルチパスの影響を加味して計測位置データを補正することは可能であるが、補正するためには個々のGPS衛星に対する車載装置のGPS処理部の処理データが必要となる。しかし、計測位置データだけでなく、処理データまで車載装置に蓄積するとすれば、蓄積するデータの情報量が膨大になるため、長時間にわたってこれらのデータを蓄積できなくなり、また、車載装置から交通情報センター装置にこれらのデータを送信するコストが高くなる。
【0006】
そこで、本発明は、マルチパスの影響により計測位置データが誤差を含む場合に、この影響を加味して計測位置データを補正しなくても、車両の正確な道路の幅方向の走行位置を推定することができる、車両走行位置推定システム及び車両走行位置推定方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の車両走行位置推定システムは、道路を所定の長さに区分けした走行区間内を走行する車両の、道路の幅方向の走行位置を推定する車両走行位置推定システムであって、前記走行区間において時系列に複数回計測された前記車両の計測位置データを取得する手段と、取得した前記計測位置データに基づいて、前記走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出する第1の算出手段と、前記第1の算出手段が算出したばらつきに基づいて前記走行区間における前記車両の、道路の幅方向の走行位置を推定する推定手段とを備えることを特徴とする(請求項1)。
【0008】
この発明によれば、走行区間において時系列に複数回計測された車両の計測位置データを取得して、当該走行区間における車両の実際の走行位置に対する計測位置のばらつきを算出し、このばらつきに基づいて当該走行区間における車両の、道路の幅方向の走行位置を推定する。例えば、図16の第1車線を走行する車両100Aに搭載した車載装置6Aの計測位置データのようにばらつきが大きい場合には、この車両100Aの、道路の幅方向の走行位置は、マルチパスの影響が大きくなると推定していた第1車線であると推定し、同図の第3車線を走行する車両100Bに搭載した車載装置6Bの計測位置データのようにばらつきが小さい場合には、この車両100Bの、道路の幅方向の計測位置は、マルチパスの影響が小さくなると推定していた第3車線であると推定する。従って、マルチパスの影響を加味して計測位置データを補正することなく、計測位置のばらつきのみから車両の正確な道路の幅方向の走行位置を推定することができる。
【0009】
また、本発明の車両走行位置推定システムは、道路地図データを記憶する手段と、取得した前記計測位置データに基づいて、前記道路地図データから前記走行区間の道路地図データを抽出する手段とをさらに備え、前記第1の算出手段は、抽出した道路地図データと取得した前記計測位置データとに基づいて、それぞれの計測位置から道路までの距離を求め、それらの距離の標準偏差を前記ばらつきとして算出することを特徴とする(請求項2)。
【0010】
この発明によれば、ばらつきとして、それぞれの計測位置から走行区間の道路地図データにおける道路までの距離の標準偏差を求めるので、例えば、この標準偏差が所定の閾値以上であれば、車両の、道路の幅方向の走行位置はマルチパスの影響が大きい車線であり、所定の閾値未満であれば、車両の、道路の幅方向の走行位置はマルチパスの小さい車線である、というように、車両の、道路の幅方向の走行位置を容易に推定することができる。
【0011】
また、本発明の車両走行位置推定システムでは、前記第1の算出手段は、取得した前記計測位置データに基づいて、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を前記ばらつきとして算出することを特徴とする(請求項3)。
【0012】
この発明によれば、ばらつきとして、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積の標準偏差を求めるので、例えば、この標準偏差が所定の閾値以上であれば、車両の、道路の幅方向の走行位置はマルチパスの影響が大きい車線であり、所定の閾値未満であれば、車両の、道路の幅方向の走行位置はマルチパスの小さい車線である、というように、車両の、道路の幅方向の走行位置を容易に推定することができる。
【0013】
また、本発明の車両走行位置推定システムでは、前記第1の算出手段は、取得した前記計測位置データに基づいて、前記走行区間の始端と終端のそれぞれに最も近い2つの計測位置を結ぶベクトルと連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を前記ばらつきとして算出することを特徴とする(請求項4)。
【0014】
この発明によれば、ばらつきとして、走行区間の始端と終端のそれぞれに最も近い2つの計測位置を結ぶベクトルと連続する2つの計測位置を結ぶベクトルとの内積の標準偏差を求めるので、例えば、この標準偏差が所定の閾値以上であれば、車両の、道路の幅方向の走行位置はマルチパスの影響が大きい車線であり、所定の閾値未満であれば、車両の、道路の幅方向の走行位置はマルチパスの小さい車線である、というように、車両の、道路の幅方向の走行位置を容易に推定することができる。
【0015】
また、本発明の車両走行位置推定システムでは、前記計測位置データにはそれぞれの計測位置を計測した時刻が含まれ、時刻とGPS衛星の位置とを対応付ける対応データ及び建造物データを記憶する手段と、前記対応データと取得した前記計測位置データに含まれる時刻とに基づいて前記車両が前記走行区間を走行していた時のGPS衛星の位置を算出する手段と、前記建造物データと取得した前記計測位置データとに基づいて、前記走行区間周辺の建造物データを抽出する手段と、算出したGPS衛星の位置と抽出した前記走行区間の周辺の建造物データとに基づいて、当該走行区間がマルチパスの影響を受け易い走行区間であるか否かを判定する第1の判定手段とをさらに備え、前記推定手段は、前記第1の判定手段がマルチパスの影響を受け易い走行区間であると判定した場合に、前記走行区間における前記車両の、道路の、道路の幅方向の走行位置を推定するものであることを特徴とする(請求項5)。
【0016】
この発明によれば、車両が走行区間を走行していた時のGPS衛星の位置を算出し、その位置と走行区間周辺の建造物データ、特に、走行区間に設置された遮蔽板の位置と高さのデータとに基づいて、走行区間がマルチパスの影響を受け易い走行区間であるか否かを判定する。例えば、走行区間の全部にわたって高さ10mの遮蔽板が設置されている場合には、GPS衛星の位置と、この遮蔽板の位置と高さのデータとに基づいて、GPS衛星からの直接波と反射波のそれぞれの伝搬経路を推定し、当該走行区間がマルチパスの影響を受け易い走行区間であるか否かを判定する。そして、当該走行区間がマルチパスの影響を受け易い走行区間であれば、ばらつきと車両の、道路の幅方向の走行位置には関係があるので、ばらつきに基づいて走行位置を推定する。一方、当該走行区間がマルチパスの影響を受け易い走行区間でなければ、ばらつきと車両の、道路の幅方向の走行位置には関係がないので、ばらつきに基づいて走行位置を推定しない。従って、車両の、道路の幅方向の走行位置をより正確に推定することができる。
【0017】
また、本発明の車両走行位置推定システムは、前記走行区間において時系列に複数回計測された前記車両の計測方位データを取得する手段と、取得した前記計測方位データに基づいて、前記走行区間における計測方位の変化が所定の範囲内であるか否かを判定する第2の判定手段とをさらに備え、前記推定手段は、前記第2の判定手段が所定の範囲内であると判定した場合に、前記走行区間における前記車両の、道路の幅方向の走行位置を推定するものであることを特徴とする(請求項6)。
【0018】
この発明によれば、走行区間において時系列に複数回計測された車両の計測方位データを取得し、この計測方位の変化が所定の範囲内であるか否かを判定する。所定の範囲内である場合には、この車両は当該走行区間で車線変更を行っている可能性が低いので、車両の、道路の幅方向の走行位置を特定することができ、ばらつきに基づく走行位置の推定を行うことができる。一方、所定の範囲内でない場合には、この車両は当該走行区間で車線変更を行っている可能性が高いので、走行位置のばらつきがこの車線変更に基づいていると推定でき、ばらつきに基づく走行位置の推定を行わない。ばらつきに基づいて走行位置を推定すると、正しく推定できないおそれがあるためである。従って、車両の、道路の幅方向の走行位置をより正確に推定することができる。
【0019】
また、本発明の車両走行位置推定システムは、前記走行区間のさらに上流の走行区間において時系列に複数回計測された前記車両の計測位置データを取得する手段と、取得した前記上流の走行区間の計測位置データに基づいて、前記上流の走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出する第2の算出手段とをさらに備え、前記推定手段は、前記第2の算出手段が算出したばらつきが所定の閾値以下である場合に、前記走行区間における前記車両の、道路の幅方向の走行位置を推定するものであることを特徴とする(請求項7)。
【0020】
この発明によれば、走行区間のさらに上流の走行区間において時系列に複数回計測された車両の計測位置データを取得して、当該上流の走行区間における車両の実際の走行位置に対する計測位置のばらつきを算出する。このばらつきが所定の閾値よりも大きければ、マルチパスの影響の有無にかかわらずこの車両の計測位置の精度が悪いか、この車両は車線変更を頻繁に行う車両であると推定して、ばらつきに基づく走行位置の推定を行わない。逆に、所定の閾値以下であれば、これらのケースには該当しないので、ばらつきに基づく走行位置の推定を行う。従って、車両の、道路の幅方向の走行位置をより正確に推定することができる。
【0021】
また、本発明の車両走行位置推定方法は、道路を所定の長さに区分けした走行区間内を走行する車両の、道路の幅方向の走行位置を推定する車両走行位置推定方法であって、前記走行区間において時系列に複数回計測された前記車両の計測位置データを取得し、取得した前記計測位置データに基づいて、前記走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出し、前記第1の算出手段が算出したばらつきに基づいて前記走行区間における前記車両の、道路の幅方向の走行位置を推定することを特徴とする(請求項8)。この発明は、請求項1に記載の車両走行位置推定システムと同一の発明にかかる方法である。
【発明の効果】
【0022】
以上のように本発明によれば、マルチパスの影響により計測位置データが誤差を含む場合に、この影響を加味して計測位置データを補正しなくても、車両の正確な道路の幅方向の走行位置を推定することができる。
【発明を実施するための最良の形態】
【0023】
実施の形態1:
以下、本発明の実施の形態を、添付図面を参照しながら詳細に説明する。
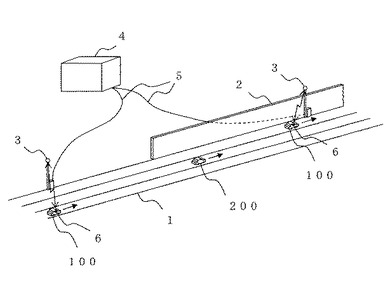
図1は、本発明に係る車両走行位置推定システムの概要を示す模式図である。図において、4は交通情報の収集・提供をするための交通情報センター装置である。交通情報センター装置4は、通信回線5に接続してあり、通信回線5には、道路1に沿って設置した少なくとも2以上の路上ビーコン3が接続してある。路上ビーコン3は、交通情報センター装置4から、所定の周期(たとえば、5分)毎に、通信回線5を介して渋滞情報、旅行時間情報、警告情報などの交通情報を受信する。
【0024】
また、路上ビーコン3は、車両100に搭載された車載装置6との間で無線による双方向通信を行う。双方向通信の通信媒体は光であっても良いし、電波であっても良い。車載装置6を搭載した車両100が路上ビーコン3を通過する際に、車載装置6から路上ビーコン3に対し、所定の周期(たとえば、1秒)毎の計測位置データを含む走行軌跡情報が送信され、路上ビーコン3から車載装置6に対し、交通情報センター装置4から受信した交通情報が送信される。
【0025】
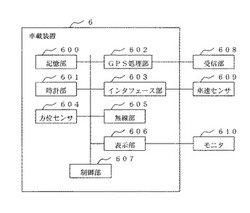
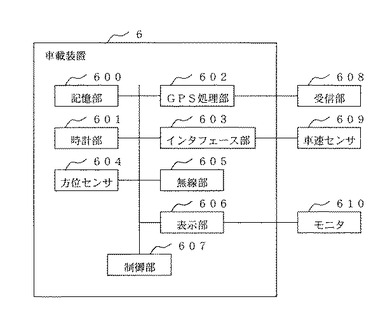
図2は車載装置6の構成を示すブロック図である。記憶部600は、当該車載装置6の識別コードを記憶している。また、記憶部600は、所定の周期(たとえば、1秒)毎に、記憶部600に記憶した識別コード、時計部601が計時した時刻、GPS処理部602が計測した計測位置(緯度、経度及び高度)、インタフェース部603が取得した計測速度、方位センサ604が計測した計測方位及び計測角速度の各データ、GPS処理部602が算出したDOP(Dilution of Precision)情報、受信部608が受信したGPS信号に含まれる測位補正情報を、走行軌跡情報として記憶する。走行軌跡情報の1レコード(所定の周期毎のデータに該当)のフォーマットは表1に示す通りである。
【0026】
【表1】

【0027】
また、記憶部600は、路上ビーコン3から受信した交通情報を記憶する。時計部601は時刻を計時する。GPS処理部602は、受信部608でGPS衛星からのGPS信号を受信し、GPS信号に含まれる時刻情報、GPS衛星の軌道情報、測位補正情報に基づいて、当該車載装置6の位置(緯度、経度及び高度)を計測し、DOP情報を算出する。インタフェース部603は、車速センサ609が車輪の角速度を検出することにより計測した車両の速度を取得する。方位センサ604は、光ファイバジャイロなどで構成されており、方位及び角速度を計測する。無線部605は、記憶部600に記憶された走行軌跡情報を路上ビーコン3に送信し、路上ビーコン3から交通情報を受信する。その際、路上ビーコン3に送信された走行軌跡情報は記憶部600からクリアされる。表示部606は、記憶部600に記憶された交通情報をドライバが視認できる画像データに変換し、モニタ610に表示する。制御部607は、マイクロコンピュータにより構成されており、記憶部600、時計部601、GPS処理部602、インタフェース部603、方位センサ604、無線部605、表示部606の処理を制御する。
【0028】
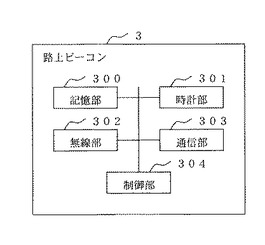
図3は路上ビーコン3の構成を示すブロック図である。記憶部300は、車載装置6から受信した走行軌跡情報を記憶する。また、記憶部300は、交通情報センター装置4から受信した交通情報を記憶する。時計部301は時刻を計時する。無線部302は、車載装置6から走行軌跡情報を受信する。また、無線部302は、車載装置6に交通情報を送信する。通信部303は、記憶部300に記憶した走行軌跡情報を、通信回線5を介して交通情報センター装置4に送信する。また、通信部303は、交通情報センター装置4から、通信回線5を介して交通情報を受信する。制御部304は、マイクロコンピュータにより構成されており、記憶部300、時計部301、無線部302、通信部303の処理を制御する。
【0029】
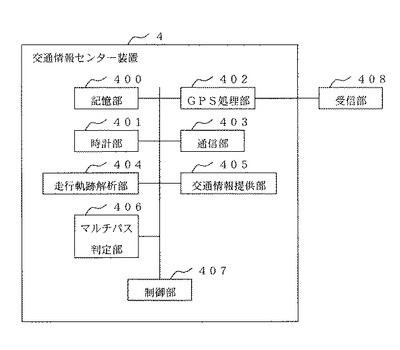
図4は交通情報センター装置4の構成を示すブロック図である。記憶部400は、地図データベースを記憶している。地図データベースには、道路に関する道路地図データ、ビルや住宅、高速道路の遮蔽板等の建造物に関する建造物データが含まれている。道路地図データには、道路を所定の長さに区分けした走行区間であるリンクの始端、終端及びその間の複数の補間点(道路が折れ曲がる地点に対応)に関する位置(緯度、経度及び高度)のデータ、リンクの車線数のデータ、リンク同士の接続に関するデータ等が含まれている。リンクは、例えば、道路に沿った2つの路上ビーコン3の間の区間を100m毎に区分けして設定される。また、建造物データには、ビルや住宅、高速道路の遮蔽板等の建造物の底面部分の各頂点の位置(経度、経度及び高度)のデータ及びこれらの建造物の高さのデータ等が含まれている。
【0030】
また、記憶部400は、受信部408が受信したGPS信号に含まれるGPS衛星の軌道情報を記憶する。この軌道情報は、複数個存在するGPS衛星のそれぞれについて、時刻と位置(緯度、経度及び高度)を対応付けた対応データである。また、記憶部400は、路上ビーコン3から通信回線5を介して受信した走行軌跡情報を、走行軌跡受信情報として記憶する。また、記憶部400は、所定の周期(たとえば、1分)毎にそれぞれのリンクがマルチパスの影響を受けやすいリンクであるか否かを示すデータである、リンク−マルチパス対応データを記憶している。リンク−マルチパス対応データの1レコード(所定の周期毎、リンク毎のデータに該当)のフォーマットは表2に示す通りである。
【0031】
【表2】
【0032】
このリンク−マルチパス対応データは、GPS衛星の軌道情報、道路地図データ及び建造物データに基づいて、次のような手順でマルチパス判定部406によって予め作成されたものである。まず、GPS衛星の軌道情報と道路地図データに含まれるリンクの始端、終端、補間点の位置データとに基づいて、上述の所定の周期毎の時刻に、それぞれのリンクにおいて、GPS信号を受信できるGPS衛星を特定する。次に、これらのGPS衛星のそれぞれの位置と、リンクの始端、終端、補間点のそれぞれの位置と、建造物データに含まれるリンクの周辺の建造物の位置や高さのデータとに基づいて、これらのGPS衛星からリンクの始端、終端、補間点のそれぞれへの直接波と反射波のそれぞれの伝搬経路を推定する。そして、直接波と反射波の伝搬経路の長さを求め、反射波が逆位相に等しく干渉しているか否かを判定して、リンクの始端、終端、補間点のいずれかにおいて反射波が逆位相に等しく干渉していればマルチパスの影響有り(1)、そうでなければマルチパスの影響無し(0)、を設定する。
【0033】
また、記憶部400は、所定の周期(たとえば、1分)毎に車両100が各リンクの各車線を走行した場合の、車両100の実際の走行位置に対する車載装置6の計測位置のばらつきの範囲を示すデータである、車線−ばらつき対応データを記憶している。車線−ばらつき対応データの1レコード(所定の周期毎、リンク毎、車線毎のデータに該当)のフォーマットは表3に示す通りである。なお、車線番号は走行方向(リンクの始端から終端への方向。以下同じ。)に対して左側から順に1、2、3・・・とする。
【0034】
【表3】
【0035】
この車線−ばらつき対応データは、次のような手順でマルチパス判定部406によって予め作成されたものである。まず、GPS衛星の軌道情報と道路地図データに含まれるリンクの始端、終端、補間点の位置データとに基づいて、上述の所定の周期毎の時刻に、それぞれのリンクにおいて、GPS信号を受信できるGPS衛星を特定する。
【0036】
次に、リンクのそれぞれの車線において、車両100が所定の速度(たとえば、時速60km)で走行した場合に車両100が通過する位置を、リンクの始端、終端、補間点の位置データとリンクの車線数とに基づいて、走行予想位置として算出する。
【0037】
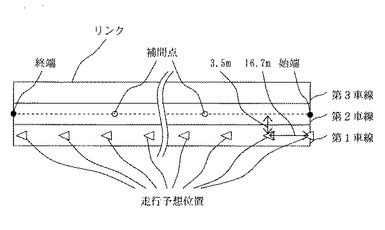
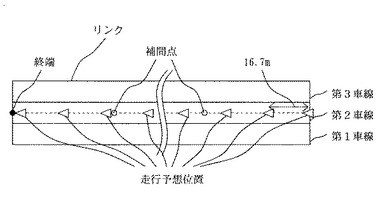
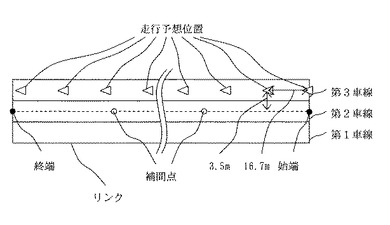
図10〜12は、走行予想位置の算出を説明するための図である。例えば、リンクの第1車線については、図10の△印に示すように、リンクの隣接する補間点同士を結ぶ線分(リンクの始端とそれに隣り合う補間点を結ぶ線分、リンクの終端とそれに隣り合う補間点を結ぶ線分を含む。以下、同じ。)から車線の幅である3.5mだけ走行方向に対して左側にずらし、16.7mの間隔を空けて、走行予想位置を算出する。また、同リンクの第2車線については、図11の△印に示すように、リンクの隣接する補間点同士を結ぶ線分上にのるようにし、16.7mの間隔を空けて、走行予想位置を算出する。また、同リンクの第3車線については、図12の△印に示すように、リンクの隣接する補間点同士を結ぶ線分から3.5mだけ走行方向に対して右側にずらし、16.7mの間隔を空けて、走行予想位置を算出する。
【0038】
次に、リンクのそれぞれの車線において、それぞれの走行予想位置と特定した複数のGPS衛星のそれぞれの位置とを直線で結び、これらの直線上に存在する高速道路の遮蔽板やビル等の建造物によるマルチパスの影響を考慮して、この走行予想位置で車載装置6が計測するであろう計測位置を予測し、予測した計測位置とリンクまでの距離を算出する。すなわち、予測した計測位置から、リンクの隣り合う補間点同士を結ぶ線分のうちで直近の線分に対して垂線を下ろし、その垂線の長さを求め、その長さに符号を付してリンクまでの距離とする。符号は、予測した計測位置が線分の走行方向に対して左側にある場合は負(マイナス)とし、右側にある場合は正(プラス)とする。予測した計測位置からリンクの直近の線分に対して垂線を下ろすことができない場合には、予測した計測位置からリンクの直近の線分の両端の補間点(始端、終端を含む。以下同じ。)までの直線距離を求め、そのうちの短い方の長さに符号を付してリンクまでの距離として求める。符号は上述の通りである。そして、予測した計測位置とリンクまでの距離の標準偏差を求め、計測位置のばらつきとする。
【0039】
次に、それぞれの車線の計測位置のばらつきと、隣接する車線の計測位置のばらつきの平均値とに基づいて、それぞれの車線の計測位置のばらつきの上限値と下限値を決定する。例えば、3車線の場合には、第1車線の計測位置のばらつきの上限値と第2車線の計測位置のばらつきの下限値を、第1車線の計測位置のばらつきと第2車線の計測位置のばらつきとの平均値とし、第2車線の計測位置のばらつきの上限値と第3車線の計測位置のばらつきの下限値を第2車線の計測位置のばらつきと第3車線の計測位置のばらつきとの平均値とする。第1車線の計測位置のばらつきの下限値は、第1車線の計測位置のばらつきから、第1車線の計測位置のばらつきの上限値と第1車線の計測位置のばらつきとの差の絶対値を引いた値とする。第3車線の計測位置のばらつきの上限値は、第3車線の計測位置のばらつきに、第3車線の計測位置のばらつきの下限値と第3車線の計測位置のばらつきとの差の絶対値を加えた値とする。
【0040】
時計部401は時刻を計時する。GPS処理部402は、受信部408でGPS衛星からのGPS信号を受信する。通信部403は、路上ビーコン3から通信回線5を介して走行軌跡情報を受信する。走行軌跡解析部404は、マイクロコンピュータにより構成されており、後述する走行軌跡解析の処理を実現し、走行軌跡受信情報の計測位置データのばらつきに基づいて、車両100の道路の幅方向の走行位置を推定する。交通情報提供部405は、マイクロコンピュータにより構成されており、後述する交通情報提供の処理を実現する。マルチパス判定部406は、マイクロコンピュータにより構成されており、上述のリンク−マルチパス対応データ及び車線−ばらつき対応データを作成する。制御部407は、マイクロコンピュータにより構成されており、記憶部400、時計部401、GPS処理部402、通信部403、走行軌跡解析部404、交通情報提供部405、マルチパス判定部406の処理を制御する。
【0041】
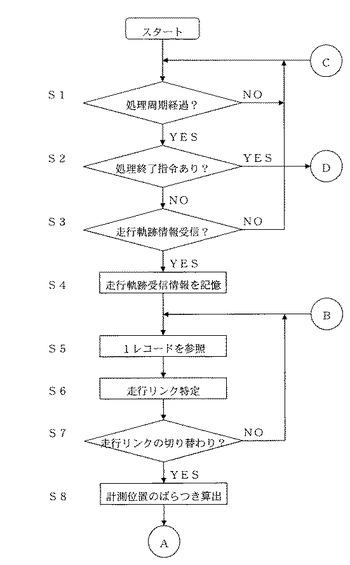
次に、交通情報センター装置4の処理手順について説明する。図5および図6は走行軌跡解析の処理手順を示すフローチャートである。走行軌跡解析部404は、処理周期(例えば、1秒)が経過したか否かを判定し(ステップS1)、経過したと判定した場合には(ステップS1でYES)、処理終了指令の有無を判定する(ステップS2)。経過していないと判定した場合には(ステップS1でNO)、走行軌跡解析部404は、ステップS1の処理を続ける。
【0042】
走行軌跡解析部404は、処理終了指令があると判定した場合には(ステップS2でYES)、処理を終了する。処理終了指令がないと判定した場合には(ステップS2でNO)、走行軌跡解析部404は、路上ビーコン3から走行軌跡情報を受信したか否かを判定し(ステップS3)、受信したと判定した場合には(ステップS3でYES)、記憶部400は受信した走行軌跡情報を走行軌跡受信情報として記憶する。走行軌跡受信情報の1レコードのフォーマットは、走行軌跡情報の1レコードのフォーマットと同じである(ステップS4)。受信していないと判定した場合には(ステップS3でNO)、走行軌跡解析部404は、ステップS1の処理を続ける。
【0043】
走行軌跡解析部404は、記憶部400に記憶した走行軌跡受信情報のレコードを、レコードに含まれる時刻の早い順に1つ参照する(ステップS5)。走行軌跡解析部404は、そのレコードに含まれる計測位置から、道路地図データに含まれるすべてのリンクの、すべての隣り合う補間点同士を結ぶ線分に対して垂線を下ろし、その垂線の長さを線分までの距離とする。計測位置から線分に対して垂線を下ろすことができない場合には、計測位置から線分の両端の補間点までの直線距離を求め、そのうちの短い方を線分までの距離とする。そして、線分までの距離が最短となる線分のそれぞれの補間点が属するリンクを走行リンクと特定する。このとき同時に、最短となった線分までの距離が、計測位置から走行リンクまでの距離として求まることになる(ステップS6)。
【0044】
走行軌跡解析部404は、特定した走行リンクの番号と前回のステップS6で特定した走行リンクの番号とを比較し、異なっていれば走行リンクが切り替わったと判定し、同じであれば走行リンクが切り替わっていないと判定する(ステップS7)。走行リンクが切り替わったと判定した場合には(ステップS7でYES)、走行軌跡解析部404は、走行リンクが切り替わるまでステップS6で求めた計測位置から切り替わり前の走行リンクまでの距離について、標準偏差を算出し、この標準偏差を切り替わり前の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、実際の走行位置に対する計測位置のばらつきとする(ステップS8)。走行リンクが切り替わっていないと判定した場合には(ステップS7でNO)、走行軌跡解析部404は、ステップS5の処理を続ける。
【0045】
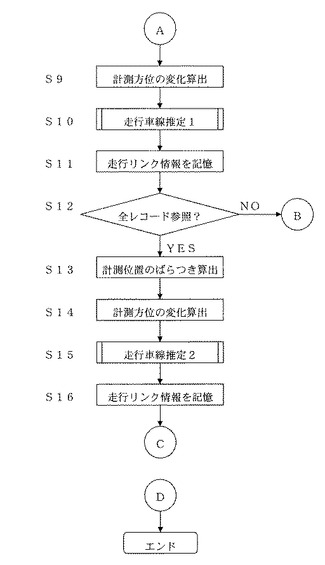
走行軌跡解析部404は、ステップS6で切り替わり前の走行リンクが特定されている間にステップS5で参照したレコードに含まれる計測方位について、変化の範囲を算出する(ステップS9)。走行軌跡解析部404は、後述する走行位置推定1の処理に基づいて、切り替わり前の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、道路の幅方向の走行位置、すなわち、走行車線を推定する(ステップS10)。記憶部400は、切り替わり前の走行リンクの番号、当該走行軌跡受信情報の識別コード、ステップS8で求めた計測位置のばらつき、ステップS10で推定した走行車線の番号、走行リンクが切り替わるまでステップS5で参照したレコードに含まれる時刻のうちで最初と最後の時刻を、走行リンク情報として記憶部400に記録する(ステップS11)。走行リンク情報の1レコード(ステップS11の処理毎に記憶するデータに該当)のフォーマットは表4の通りである。
【0046】
【表4】
【0047】
走行軌跡解析部404は、走行軌跡受信情報の全てのレコードを参照したか否かを判定し(ステップS12)、全てのレコードを参照したと判定した場合には(ステップS12でYES)、走行リンクの切り替わりに該当するとみなして、これまでにステップS6で求めた計測位置から現在の走行リンクまでの距離について、標準偏差を算出し、この標準偏差を現在の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、実際の走行位置に対する計測位置のばらつきとする(ステップS13)。全てのレコードを参照していないと判定した場合には(ステップS13でNO)、走行軌跡解析部404は、ステップS5の処理を続ける。
【0048】
走行軌跡解析部404は、ステップS6で現在の走行リンクが特定されている間にステップS5で参照したレコードに含まれる計測方位について、変化の範囲を算出する(ステップS14)。走行軌跡解析部404は、後述する走行位置推定2の処理に基づいて、現在の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、道路の幅方向の走行位置、すなわち、走行車線を推定する(ステップS15)。記憶部400は、現在の走行リンクの番号、当該走行軌跡受信情報の識別コード、ステップS13で求めた計測位置のばらつき、ステップS15で推定した走行車線の番号、ステップS6で現在の走行リンクが特定されている間にステップS5で参照したレコードに含まれる時刻のうちで最初と最後の時刻を、走行リンク情報として記憶部400に記録する(ステップS16)。走行軌跡解析部404は、ステップS1の処理を続ける。
【0049】
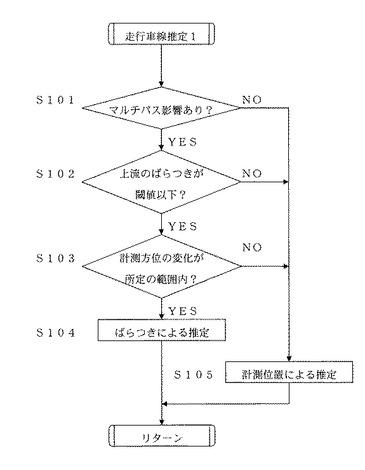
図7は走行位置推定1の処理手順を示すフローチャートである。走行軌跡解析部404は、ステップS6(図5)で特定された切り替わり前の走行リンクがマルチパスの影響があるリンクであるか否かを判定する。すなわち、記憶部400に記憶したリンク−マルチパス対応データから、「時刻」がステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値との差の絶対値が30秒以内であり、「リンク番号」が切り替わり前の走行リンクの番号に一致するレコードを抽出して、このレコードのマルチパス影響の有無を参照する(ステップS101)。
【0050】
切り替わり前の走行リンクがマルチパスの影響があるリンクであった場合には(ステップS101でYES)、走行軌跡解析部404は、切り替わり前の走行リンクの上流において、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の計測位置のばらつきが安定しているか否かを判定する。すなわち、記憶部400に記憶している走行リンク情報から、「走行リンク番号」が切り替わり前の走行リンクの上流側に接続するリンクの番号に一致し、「識別コード」が当該走行軌跡受信情報の識別コードに一致し、「時刻(最初)」と「時刻(最後)」が、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値から、所定時間(例えば、10分間)前までに含まれているレコードを抽出し、そのレコードに含まれる計測位置のばらつきを参照する。さらに、走行リンク情報から、「走行リンク番号」がその上流側に接続するリンクのさらに上流側に接続するリンクの番号に一致し、「識別コード」が当該走行軌跡受信情報の識別コードに一致し、「時刻(最初)」と「時刻(最後)」が、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値から、所定時間前までに含まれているレコードを抽出し、そのレコードに含まれる計測位置のばらつきを参照する。これを、上流側に接続するリンクの長さの合計が所定の長さ(例えば、5km)以上となるまで繰り返し、これらのリンクにおける計測位置のばらつきの平均値を算出する。そして、その平均値が所定の閾値以下となっていれば、切り替わり前の走行リンクの上流において計測位置のばらつきが安定していると判定し、所定の閾値より大きければ、切り替わり前の走行リンクの上流においてばらつきが安定していないと判定する(ステップS102)。
【0051】
切り替わり前の走行リンクがマルチパスの影響があるリンクでない場合には(ステップS101でNO)、走行軌跡解析部404は、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、道路の幅方向の走行位置、すなわち、走行車線を推定する。マルチパスの影響がないのであれば、計測位置は誤差を含んでいないと推定できるので、計測位置から正確に当該車両が走行した車線を推定できるからである。
【0052】
図10〜図12に示したように、道路地図データにおけるリンクの始端、終端、補間点の幅方向の位置はリンクのほぼ中央となっているため、計測位置と道路地図データにおける切り替わり前の走行リンクの始端、終端、補間点の位置との関係から、計測位置が切り替わり前の走行リンクの走行方向に対して右側又は左側のいずれにあるかを判定できる。そして、その判定結果とステップS6(図5)で算出した計測位置から切り替わり前の走行リンクまでの距離とに基づいて、当該車両100が走行した車線を推定する。
【0053】
例えば、切り替わり前の走行リンクが3車線であって、計測位置が切り替わり前の走行リンクの右側にあり、計測位置から切り替わり前の走行リンクまでの距離が車線の幅に相当する3.5mであれば、当該車両が走行した車線は第1車線であると推定する。また、同様に、計測位置が切り替わり前の走行リンクの右側にあり、計測位置から切り替わり前の走行リンクまでの距離が0.1mであれば、当該車両が走行した車線は第2車線であると推定でき、計測位置が切り替わり前の走行リンクの左側にあり、計測位置から切り替わり前の走行リンクまでの距離が3.5mであれば、当該車両が走行した車線は第3車線であると推定する(ステップS105)。
【0054】
走行リンクの上流において計測位置のばらつきが安定していると判定した場合には(ステップS102でYES)、走行軌跡解析部404は、ステップS9(図6)で算出した計測方位の変化の範囲が所定の閾値(例えば、30°)以下であるか否かを判定する(ステップS103)。走行リンクの上流において計測位置のばらつきが安定していないと判定した場合には(ステップS102でNO)、走行軌跡解析部404は、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて当該車両100が走行した車線を推定する(ステップS105)。これは次の理由による。すなわち、5kmもの十分に長い区間にわたって計測位置のばらつきが安定していないということは、マルチパスの影響の有無にかかわらず当該車両100の車載装置6の計測位置の精度が悪い、あるいは、当該車両100は車線変更を頻繁に行う車両である、と推定できる。従って、切り替わり前の走行リンクにおける計測位置のばらつきも、これらの原因に基づいていると推定でき、ステップS104の計測位置のばらつきによる当該車両100の走行車線の推定を行うと、正しく推定できないおそれがある。
【0055】
計測方位の変化の範囲が所定の閾値以下であると判定した場合には(ステップS103でYES)、走行軌跡解析部404は、ステップS8(図5)で算出した計測位置のばらつきに基づいて、当該車両100が走行した車線の推定を行う。すなわち、記憶部400に記憶した車線−ばらつき対応データから、「時刻」以上「時刻」に1分を加えた時刻未満の範囲内に、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値が含まれ、「リンク番号」が切り替わり前の走行リンクの番号と一致し、「計測位置のばらつきの下限値」以上「計測位置のばらつきの上限値」未満の範囲内に計測位置のばらつきが含まれるレコードを抽出し、そのレコードに含まれる車線番号を参照する(ステップS104)。これにより、マルチパスの影響を加味して計測位置を補正することなく、計測位置のばらつきのみから当該車両100の正確な道路の幅方向の走行位置、すなわち、走行車線を推定することができる。
【0056】
計測方位の変化の範囲が所定の閾値以下でないと判定した場合には(ステップS103でNO)、走行軌跡解析部404は、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて当該車両100が走行した車線を推定する(ステップS105)。当該車両100は切り替わり前の走行リンクにおいて車線変更を行っている可能性が高いので、計測位置のばらつきがこの車線変更に基づいていると推定でき、ステップS104の計測位置のばらつきによる当該車両100の走行車線の推定を行うと、正しく推定できないおそれがあるためである。
【0057】
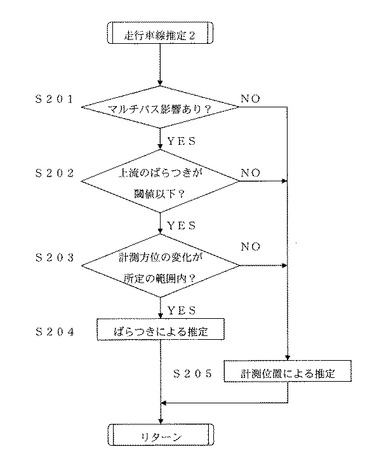
図8は走行位置推定2の処理手順を示すフローチャートである。基本的には図7に示す走行位置推定1の処理手順と同じであり、切り替わり前の走行リンクに代えて、現在の走行リンクを処理対象としている。走行軌跡解析部404は、ステップS6(図5)で特定された現在の走行リンクがマルチパスの影響があるリンクであるか否かを判定する。すなわち、記憶部400に記憶したリンク−マルチパス対応データから、「時刻」がステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値との差の絶対値が30秒以内であり、「リンク番号」が現在の走行リンクの番号に一致するレコードを抽出して、このレコードのマルチパス影響の有無を参照する(ステップS201)。
【0058】
現在の走行リンクがマルチパスの影響があるリンクであった場合には(ステップS201でYES)、走行軌跡解析部404は、現在の走行リンクの上流において、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の計測位置のばらつきが安定しているか否かを判定する。すなわち、記憶部400に記憶している走行リンク情報から、「走行リンク番号」が現在の走行リンクの上流側に接続するリンクの番号に一致し、「識別コード」が当該走行軌跡受信情報の識別コードに一致し、「時刻(最初)」と「時刻(最後)」が、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値から、所定時間(例えば、10分間)前までに含まれているレコードを抽出し、そのレコードに含まれる計測位置のばらつきを参照する。さらに、走行リンク情報から、「走行リンク番号」がその上流側に接続するリンクのさらに上流側に接続するリンクの番号に一致し、「識別コード」が当該走行軌跡受信情報の識別コードに一致し、「時刻(最初)」と「時刻(最後)」が、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値から、所定時間前までに含まれているレコードを抽出し、そのレコードに含まれる計測位置のばらつきを参照する。これを、上流側に接続するリンクの長さの合計が所定の長さ(例えば、5km)以上となるまで繰り返し、これらのリンクにおける計測位置のばらつきの平均値を算出する。そして、その平均値が所定の閾値以下となっていれば、現在の走行リンクの上流において計測位置のばらつきが安定していると判定し、所定の閾値より大きければ、現在の走行リンクの上流においてばらつきが安定していないと判定する(ステップS202)。
【0059】
現在の走行リンクがマルチパスの影響があるリンクでない場合には(ステップS201でNO)、走行軌跡解析部404は、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、道路の幅方向の走行位置、すなわち、走行車線を推定する(ステップS205)。
【0060】
走行リンクの上流において計測位置のばらつきが安定していると判定した場合には(ステップS202でYES)、走行軌跡解析部404は、ステップS14(図6)で算出した計測方位の変化の範囲が所定の閾値(例えば、30°)以下であるか否かを判定する(ステップS203)。走行リンクの上流において計測位置のばらつきが安定していないと判定した場合には(ステップS202でNO)、走行軌跡解析部404は、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて当該車両100が走行した車線を推定する(ステップS205)。
【0061】
計測方位の変化の範囲が所定の閾値以下であると判定した場合には(ステップS203でYES)、走行軌跡解析部404は、ステップS13(図6)で算出した計測位置のばらつきに基づいて、当該車両100が走行した車線の推定を行う。すなわち、記憶部400に記憶した車線−ばらつき対応データから、「時刻」以上「時刻」に1分を加えた時刻未満の範囲内に、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値が含まれ、「リンク番号」が現在の走行リンクの番号と一致し、「計測位置のばらつきの下限値」以上「計測位置のばらつきの上限値」未満の範囲内に計測位置のばらつきが含まれるレコードを抽出し、そのレコードに含まれる車線番号を参照する(ステップS204)。これにより、マルチパスの影響を加味して計測位置を補正することなく、計測位置のばらつきのみから当該車両100の正確な道路の幅方向の走行位置、すなわち、走行車線を推定することができる。
【0062】
計測方位の変化の範囲が所定の閾値以下でないと判定した場合には(ステップS203でNO)、走行軌跡解析部404は、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて当該車両100が走行した車線を推定する(ステップS205)。
【0063】
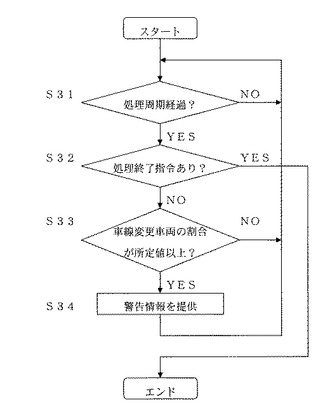
図9は交通情報提供の処理手順を示すフローチャートである。交通情報提供部405は、処理周期(例えば、5分)が経過したか否かを判定し(ステップS31)、経過していると判定した場合には(ステップS31でYES)、処理終了指令の有無を判定する(ステップS32)。経過していないと判定した場合には(ステップS31でNO)、交通情報提供部405は、ステップS31の処理を続ける。
【0064】
交通情報提供部405は、処理終了指令があると判定した場合には(ステップS32でYES)、処理を終了する。処理終了指令がないと判定した場合には(ステップS32でNO)、交通情報提供部405は、記憶部400に記憶した走行リンク情報から「時刻(最後)」が現在の時刻から5分前までの間に含まれているレコードをすべて参照し、隣接する走行リンクにおいて、車線変更をしている車両が所定の割合(たとえば、90%)以上であるか否かを判定する。すなわち、「走行リンク番号」が隣接するリンクの番号であって、「識別コード」が同一であるレコードのペアを抽出し、そのペアのうちで車線番号が異なっているペアの割合を求め、その割合が所定の割合以上であるか否かを判定する(ステップS33)。車線変更をしている車両が所定の割合以上であると判定した場合には(ステップS33でYES)、交通情報提供部405は、隣接する走行リンクのうちで下流側の走行リンクに何らかの障害物が存在しているため、車両がそれを避けるべく車線変更をしている可能性が高いと推定して、道路上に障害物がある旨の警告情報を作成して、路上ビーコン3に送信し(ステップS34)、ステップS31の処理を続ける。車線変更をしている車両が所定の割合以上でないと判定した場合には(ステップS33でNO)、交通情報提供部405は、ステップS31の処理を続ける。
【0065】
実施の形態2:
上述の実施の形態1においては、計測位置から走行リンクまでの距離の標準偏差を算出し、計測位置のばらつきとするものであったが、これに限定されるものではなく、例えば、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を算出して、計測位置のばらつきとすることもできる。
【0066】
実施の形態2に係る交通情報センター装置4では、記憶部400が記憶している車線−ばらつき対応データは、次のような手順でマルチパス判定部406によって予め作成される。まず、GPS衛星の軌道情報と道路地図データに含まれるリンクの始端、終端、補間点の位置データとに基づいて、上述の所定の周期毎の時刻に、それぞれのリンクにおいて、GPS信号を受信できるGPS衛星を特定する。
【0067】
次に、リンクのそれぞれの車線において、車両100が所定の速度(たとえば、時速60km)で走行した場合に車両100が通過する位置を、リンクの始端、終端、補間点の位置データとリンクの車線数とに基づいて、走行予想位置として算出する。
【0068】
次に、リンクのそれぞれの車線において、それぞれの走行予想位置と特定した複数のGPS衛星のそれぞれの位置とを直線で結び、これらの直線上に存在する高速道路の遮蔽板やビル等の建造物によるマルチパスの影響を考慮して、この走行予想位置で車載装置6が計測するであろう計測位置を予測し、連続する2つの予測した計測位置を結ぶベクトルと次の連続する2つの予測した計測位置を結ぶベクトルとの内積をそれぞれ求める。
【0069】
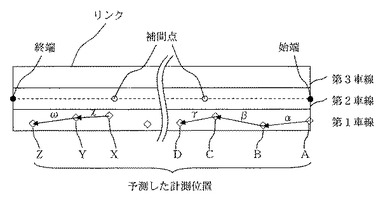
図13は、実施の形態2における内積の算出を説明するための図である。例えば、図13のように、予測した計測位置が図中の◇印のようになった場合、始端に最も近いAとその次のBとを結ぶベクトルαと、Bとその次のCとを結ぶベクトルβとの内積を求め、次に、ベクトルβと、CとDとを結ぶベクトルγとの内積を求める。これを順次行い、最後に、XとYとを結ぶベクトルχと、Yと終端に最も近いZとを結ぶωとの内積を求める。そして、これらの内積の標準偏差を求め、計測位置のばらつきとする。
【0070】
次に、それぞれの車線の計測位置のばらつきと、隣接する車線の計測位置のばらつきの平均値とに基づいて、それぞれの車線の計測位置のばらつきの上限値と下限値を決定する。例えば、3車線の場合には、第1車線の計測位置のばらつきの上限値と第2車線の計測位置のばらつきの下限値を、第1車線の計測位置のばらつきと第2車線の計測位置のばらつきとの平均値とし、第2車線の計測位置のばらつきの上限値と第3車線の計測位置のばらつきの下限値を第2車線の計測位置のばらつきと第3車線の計測位置のばらつきとの平均値とする。第1車線の計測位置のばらつきの下限値は、第1車線の計測位置のばらつきから、第1車線の計測位置のばらつきの上限値と第1車線の計測位置のばらつきとの差の絶対値を引いた値とする。第3車線の計測位置のばらつきの上限値は、第3車線の計測位置のばらつきに、第3車線の計測位置のばらつきの下限値と第3車線の計測位置のばらつきとの差の絶対値を加えた値とする。
【0071】
また、実施の形態2に係る交通情報センター装置4では、図5のステップS8において、走行軌跡解析部404は、ステップS6で切り替わり前の走行リンクが特定されている間にステップS5で参照したレコードに含まれる計測位置について、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を算出して、この標準偏差を切り替わり前の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、実際の走行位置に対する計測位置のばらつきとする。なお、その他は実施の形態1と同様であるので、説明は省略する。
【0072】
実施の形態3:
上述の実施の形態2においては、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を算出して、計測位置のばらつきとするものであったが、これに限定されるものではなく、例えば、リンクの始端と終端のそれぞれに最も近い2つの計測位置を結ぶベクトルと連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を算出して、計測位置のばらつきとすることもできる。
【0073】
実施の形態3に係る交通情報センター装置4では、記憶部400が記憶している車線−ばらつき対応データは、次のような手順でマルチパス判定部406によって予め作成される。まず、GPS衛星の軌道情報と道路地図データに含まれるリンクの始端、終端、補間点の位置データとに基づいて、上述の所定の周期毎の時刻に、それぞれのリンクにおいて、GPS信号を受信できるGPS衛星を特定する。
【0074】
次に、リンクのそれぞれの車線において、車両100が所定の速度(たとえば、時速60km)で走行した場合に車両100が通過する位置を、リンクの始端、終端、補間点の位置データとリンクの車線数とに基づいて、走行予想位置として算出する。
【0075】
次に、リンクのそれぞれの車線において、それぞれの走行予想位置と特定した複数のGPS衛星のそれぞれの位置とを直線で結び、これらの直線上に存在する高速道路の遮蔽板やビル等の建造物によるマルチパスの影響を考慮して、この走行予想位置で車載装置6が計測するであろう計測位置を予測し、リンクの始端と終端のそれぞれに最も近い2つの予測した計測位置を結ぶベクトルと連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求める。
【0076】
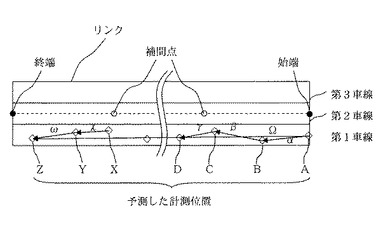
図14は、実施の形態3における内積の算出を説明するための図である。例えば、図14のように、予測した計測位置が図中の◇印のようになった場合、始端に最も近いAと終端に最も近いZとを結ぶベクトルΩと、Aとその次のBとを結ぶベクトルαとの内積を求め、次に、ベクトルΩと、Bとその次のCとを結ぶベクトルβとの内積を求める。これを順次行い、最後に、ベクトルΩと、Yと終端に最も近いZとを結ぶωとの内積を求める。そして、これらの内積の標準偏差を求め、計測位置のばらつきとする。
【0077】
次に、それぞれの車線の計測位置のばらつきと、隣接する車線の計測位置のばらつきの平均値とに基づいて、それぞれの車線の計測位置のばらつきの上限値と下限値を決定する。例えば、3車線の場合には、第1車線の計測位置のばらつきの上限値と第2車線の計測位置のばらつきの下限値を、第1車線の計測位置のばらつきと第2車線の計測位置のばらつきとの平均値とし、第2車線の計測位置のばらつきの上限値と第3車線の計測位置のばらつきの下限値を第2車線の計測位置のばらつきと第3車線の計測位置のばらつきとの平均値とする。第1車線の計測位置のばらつきの下限値は、第1車線の計測位置のばらつきから、第1車線の計測位置のばらつきの上限値と第1車線の計測位置のばらつきとの差の絶対値を引いた値とする。第3車線の計測位置のばらつきの上限値は、第3車線の計測位置のばらつきに、第3車線の計測位置のばらつきの下限値と第3車線の計測位置のばらつきとの差の絶対値を加えた値とする。
【0078】
また、実施の形態3に係る交通情報センター装置4では、図5のステップS8において、走行軌跡解析部404は、ステップS6で切り替わり前の走行リンクが特定されている間にステップS5で参照したレコードに含まれる計測位置について、リンクの始端との距離が最も近い計測位置とリンクの終端との距離が最も近い計測位置とを結ぶベクトルと、これらのレコードを参照した順に連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を算出して、この標準偏差を切り替わり前の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、実際の走行位置に対する計測位置のばらつきとする。なお、その他は実施の形態1と同様であるので、説明は省略する。
【0079】
上述の実施の形態1〜3においては、車載装置6と交通情報センター装置4が路上ビーコン3を介して走行軌跡情報及び交通情報を送受信する構成であったが、車載装置6と交通情報センター装置4が携帯電話等を用いて直接これらの情報を送受信する構成であっても良い。
【0080】
また、上述の実施の形態1〜3においては、交通情報センター装置4にて、走行軌跡情報を解析し、車両100の道路の幅方向の走行位置を推定する構成であったが、車載装置6がさらに走行軌跡解析部404とマルチパス判定部406とを含み、車載装置6にて、走行軌跡情報を解析し、車両100の道路の幅方向の走行位置を推定する構成であっても良い。
【0081】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0082】
【図1】本発明に係る車両走行位置推定システムの概要を示す模式図である。
【図2】車載装置6の構成を示すブロック図である。
【図3】路上ビーコン3の構成を示すブロック図である。
【図4】交通情報センター装置4の構成を示すブロック図である。
【図5】走行軌跡解析の処理手順を示すフローチャートである。
【図6】走行軌跡解析の処理手順を示すフローチャートである。
【図7】走行位置推定1の処理手順を示すフローチャートである。
【図8】走行位置推定2の処理手順を示すフローチャートである。
【図9】交通情報提供の処理手順を示すフローチャートである。
【図10】走行予想位置の算出を説明するための図である。
【図11】走行予想位置の算出を説明するための図である。
【図12】走行予想位置の算出を説明するための図である。
【図13】実施の形態2における内積の算出を説明するための図である。
【図14】実施の形態3における内積の算出を説明するための図である。
【図15】マルチパスの影響を説明するための図である。
【図16】マルチパスの影響を説明するための図である。
【符号の説明】
【0083】
1 道路
2 遮蔽板
3 路上ビーコン
4 交通情報センター装置
5 通信回線
6、6A、6B 車載装置
100、100A、100B 車載装置を搭載した車両
200 車載装置を搭載していない車両
300 記憶部
301 時計部
302 無線部
303 通信部
304 制御部
400 記憶部
401 時計部
402 GPS処理部
403 通信部
404 走行軌跡解析部
405 交通情報提供部
406 マルチパス判定部
407 制御部
408 受信部
600 記憶部
601 時計部
602 GPS処理部
603 インタフェース部
604 方位センサ
605 無線部
606 表示部
607 制御部
608 受信部
609 車速センサ
610 モニタ
【技術分野】
【0001】
本発明は、複数のGPS衛星からの受信電波に基づいて車両の位置を推定することができる車両走行位置推定システム及び車両走行位置推定方法に関する。
【背景技術】
【0002】
複数のGPS衛星からの受信電波に基づいて車両の位置を時系列に複数回計測して蓄積し、所定のタイミングで蓄積した計測位置データを交通情報センター装置に送信する車載装置が開示されている。また、この計測位置データを受信する交通情報センター装置が開示されている(特許文献1)。
【特許文献1】特開2005−156308号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
交通情報センター装置において、この受信した計測位置データを解析し、車両の、道路の幅方向の走行位置を特定したうえで、車両が道路上の障害物を避けるために行った車線変更を検出する研究を、発明者らは進めている。
ところで、GPS衛星から送信された電波が建造物等によって反射・回折し、車載装置が複数の経路から同じ電波を受信してしまうことがある。これをマルチパスという。このマルチパスの影響により計測位置データが誤差を含む場合があった。
【0004】
図15、16は、マルチパスの影響を説明するための図である。例えば、高速道路では、図15に示すように道路1からの騒音を防止するための遮蔽板2が道路1に沿って設置されている。この遮蔽板2のためにマルチパスが発生し、遮蔽板2に近い第1車線を走行した車両100Aに搭載した車載装置6Aの計測位置データではマルチパスの影響が大きく、誤差が多い場合、図16に示すように、車載装置6Aの計測位置データは第1車線に沿っておらず、ばらつきが大きい。一方、第3車線を走行した車両100Bに搭載した車載装置6Bの計測位置データはマルチパスの影響が出にくければ、誤差が少なく、図16に示すように、車載装置6Bの計測位置データは第3車線にほぼ沿っており、ばらつきが小さい。
【0005】
計測位置データにマルチパスの影響による誤差が含まれていれば、車両の、道路の幅方向の走行位置を特定できないので、車線変更を正確に検出できないという問題がある。交通情報センター装置において、マルチパスの影響を加味して計測位置データを補正することは可能であるが、補正するためには個々のGPS衛星に対する車載装置のGPS処理部の処理データが必要となる。しかし、計測位置データだけでなく、処理データまで車載装置に蓄積するとすれば、蓄積するデータの情報量が膨大になるため、長時間にわたってこれらのデータを蓄積できなくなり、また、車載装置から交通情報センター装置にこれらのデータを送信するコストが高くなる。
【0006】
そこで、本発明は、マルチパスの影響により計測位置データが誤差を含む場合に、この影響を加味して計測位置データを補正しなくても、車両の正確な道路の幅方向の走行位置を推定することができる、車両走行位置推定システム及び車両走行位置推定方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の車両走行位置推定システムは、道路を所定の長さに区分けした走行区間内を走行する車両の、道路の幅方向の走行位置を推定する車両走行位置推定システムであって、前記走行区間において時系列に複数回計測された前記車両の計測位置データを取得する手段と、取得した前記計測位置データに基づいて、前記走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出する第1の算出手段と、前記第1の算出手段が算出したばらつきに基づいて前記走行区間における前記車両の、道路の幅方向の走行位置を推定する推定手段とを備えることを特徴とする(請求項1)。
【0008】
この発明によれば、走行区間において時系列に複数回計測された車両の計測位置データを取得して、当該走行区間における車両の実際の走行位置に対する計測位置のばらつきを算出し、このばらつきに基づいて当該走行区間における車両の、道路の幅方向の走行位置を推定する。例えば、図16の第1車線を走行する車両100Aに搭載した車載装置6Aの計測位置データのようにばらつきが大きい場合には、この車両100Aの、道路の幅方向の走行位置は、マルチパスの影響が大きくなると推定していた第1車線であると推定し、同図の第3車線を走行する車両100Bに搭載した車載装置6Bの計測位置データのようにばらつきが小さい場合には、この車両100Bの、道路の幅方向の計測位置は、マルチパスの影響が小さくなると推定していた第3車線であると推定する。従って、マルチパスの影響を加味して計測位置データを補正することなく、計測位置のばらつきのみから車両の正確な道路の幅方向の走行位置を推定することができる。
【0009】
また、本発明の車両走行位置推定システムは、道路地図データを記憶する手段と、取得した前記計測位置データに基づいて、前記道路地図データから前記走行区間の道路地図データを抽出する手段とをさらに備え、前記第1の算出手段は、抽出した道路地図データと取得した前記計測位置データとに基づいて、それぞれの計測位置から道路までの距離を求め、それらの距離の標準偏差を前記ばらつきとして算出することを特徴とする(請求項2)。
【0010】
この発明によれば、ばらつきとして、それぞれの計測位置から走行区間の道路地図データにおける道路までの距離の標準偏差を求めるので、例えば、この標準偏差が所定の閾値以上であれば、車両の、道路の幅方向の走行位置はマルチパスの影響が大きい車線であり、所定の閾値未満であれば、車両の、道路の幅方向の走行位置はマルチパスの小さい車線である、というように、車両の、道路の幅方向の走行位置を容易に推定することができる。
【0011】
また、本発明の車両走行位置推定システムでは、前記第1の算出手段は、取得した前記計測位置データに基づいて、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を前記ばらつきとして算出することを特徴とする(請求項3)。
【0012】
この発明によれば、ばらつきとして、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積の標準偏差を求めるので、例えば、この標準偏差が所定の閾値以上であれば、車両の、道路の幅方向の走行位置はマルチパスの影響が大きい車線であり、所定の閾値未満であれば、車両の、道路の幅方向の走行位置はマルチパスの小さい車線である、というように、車両の、道路の幅方向の走行位置を容易に推定することができる。
【0013】
また、本発明の車両走行位置推定システムでは、前記第1の算出手段は、取得した前記計測位置データに基づいて、前記走行区間の始端と終端のそれぞれに最も近い2つの計測位置を結ぶベクトルと連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を前記ばらつきとして算出することを特徴とする(請求項4)。
【0014】
この発明によれば、ばらつきとして、走行区間の始端と終端のそれぞれに最も近い2つの計測位置を結ぶベクトルと連続する2つの計測位置を結ぶベクトルとの内積の標準偏差を求めるので、例えば、この標準偏差が所定の閾値以上であれば、車両の、道路の幅方向の走行位置はマルチパスの影響が大きい車線であり、所定の閾値未満であれば、車両の、道路の幅方向の走行位置はマルチパスの小さい車線である、というように、車両の、道路の幅方向の走行位置を容易に推定することができる。
【0015】
また、本発明の車両走行位置推定システムでは、前記計測位置データにはそれぞれの計測位置を計測した時刻が含まれ、時刻とGPS衛星の位置とを対応付ける対応データ及び建造物データを記憶する手段と、前記対応データと取得した前記計測位置データに含まれる時刻とに基づいて前記車両が前記走行区間を走行していた時のGPS衛星の位置を算出する手段と、前記建造物データと取得した前記計測位置データとに基づいて、前記走行区間周辺の建造物データを抽出する手段と、算出したGPS衛星の位置と抽出した前記走行区間の周辺の建造物データとに基づいて、当該走行区間がマルチパスの影響を受け易い走行区間であるか否かを判定する第1の判定手段とをさらに備え、前記推定手段は、前記第1の判定手段がマルチパスの影響を受け易い走行区間であると判定した場合に、前記走行区間における前記車両の、道路の、道路の幅方向の走行位置を推定するものであることを特徴とする(請求項5)。
【0016】
この発明によれば、車両が走行区間を走行していた時のGPS衛星の位置を算出し、その位置と走行区間周辺の建造物データ、特に、走行区間に設置された遮蔽板の位置と高さのデータとに基づいて、走行区間がマルチパスの影響を受け易い走行区間であるか否かを判定する。例えば、走行区間の全部にわたって高さ10mの遮蔽板が設置されている場合には、GPS衛星の位置と、この遮蔽板の位置と高さのデータとに基づいて、GPS衛星からの直接波と反射波のそれぞれの伝搬経路を推定し、当該走行区間がマルチパスの影響を受け易い走行区間であるか否かを判定する。そして、当該走行区間がマルチパスの影響を受け易い走行区間であれば、ばらつきと車両の、道路の幅方向の走行位置には関係があるので、ばらつきに基づいて走行位置を推定する。一方、当該走行区間がマルチパスの影響を受け易い走行区間でなければ、ばらつきと車両の、道路の幅方向の走行位置には関係がないので、ばらつきに基づいて走行位置を推定しない。従って、車両の、道路の幅方向の走行位置をより正確に推定することができる。
【0017】
また、本発明の車両走行位置推定システムは、前記走行区間において時系列に複数回計測された前記車両の計測方位データを取得する手段と、取得した前記計測方位データに基づいて、前記走行区間における計測方位の変化が所定の範囲内であるか否かを判定する第2の判定手段とをさらに備え、前記推定手段は、前記第2の判定手段が所定の範囲内であると判定した場合に、前記走行区間における前記車両の、道路の幅方向の走行位置を推定するものであることを特徴とする(請求項6)。
【0018】
この発明によれば、走行区間において時系列に複数回計測された車両の計測方位データを取得し、この計測方位の変化が所定の範囲内であるか否かを判定する。所定の範囲内である場合には、この車両は当該走行区間で車線変更を行っている可能性が低いので、車両の、道路の幅方向の走行位置を特定することができ、ばらつきに基づく走行位置の推定を行うことができる。一方、所定の範囲内でない場合には、この車両は当該走行区間で車線変更を行っている可能性が高いので、走行位置のばらつきがこの車線変更に基づいていると推定でき、ばらつきに基づく走行位置の推定を行わない。ばらつきに基づいて走行位置を推定すると、正しく推定できないおそれがあるためである。従って、車両の、道路の幅方向の走行位置をより正確に推定することができる。
【0019】
また、本発明の車両走行位置推定システムは、前記走行区間のさらに上流の走行区間において時系列に複数回計測された前記車両の計測位置データを取得する手段と、取得した前記上流の走行区間の計測位置データに基づいて、前記上流の走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出する第2の算出手段とをさらに備え、前記推定手段は、前記第2の算出手段が算出したばらつきが所定の閾値以下である場合に、前記走行区間における前記車両の、道路の幅方向の走行位置を推定するものであることを特徴とする(請求項7)。
【0020】
この発明によれば、走行区間のさらに上流の走行区間において時系列に複数回計測された車両の計測位置データを取得して、当該上流の走行区間における車両の実際の走行位置に対する計測位置のばらつきを算出する。このばらつきが所定の閾値よりも大きければ、マルチパスの影響の有無にかかわらずこの車両の計測位置の精度が悪いか、この車両は車線変更を頻繁に行う車両であると推定して、ばらつきに基づく走行位置の推定を行わない。逆に、所定の閾値以下であれば、これらのケースには該当しないので、ばらつきに基づく走行位置の推定を行う。従って、車両の、道路の幅方向の走行位置をより正確に推定することができる。
【0021】
また、本発明の車両走行位置推定方法は、道路を所定の長さに区分けした走行区間内を走行する車両の、道路の幅方向の走行位置を推定する車両走行位置推定方法であって、前記走行区間において時系列に複数回計測された前記車両の計測位置データを取得し、取得した前記計測位置データに基づいて、前記走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出し、前記第1の算出手段が算出したばらつきに基づいて前記走行区間における前記車両の、道路の幅方向の走行位置を推定することを特徴とする(請求項8)。この発明は、請求項1に記載の車両走行位置推定システムと同一の発明にかかる方法である。
【発明の効果】
【0022】
以上のように本発明によれば、マルチパスの影響により計測位置データが誤差を含む場合に、この影響を加味して計測位置データを補正しなくても、車両の正確な道路の幅方向の走行位置を推定することができる。
【発明を実施するための最良の形態】
【0023】
実施の形態1:
以下、本発明の実施の形態を、添付図面を参照しながら詳細に説明する。
図1は、本発明に係る車両走行位置推定システムの概要を示す模式図である。図において、4は交通情報の収集・提供をするための交通情報センター装置である。交通情報センター装置4は、通信回線5に接続してあり、通信回線5には、道路1に沿って設置した少なくとも2以上の路上ビーコン3が接続してある。路上ビーコン3は、交通情報センター装置4から、所定の周期(たとえば、5分)毎に、通信回線5を介して渋滞情報、旅行時間情報、警告情報などの交通情報を受信する。
【0024】
また、路上ビーコン3は、車両100に搭載された車載装置6との間で無線による双方向通信を行う。双方向通信の通信媒体は光であっても良いし、電波であっても良い。車載装置6を搭載した車両100が路上ビーコン3を通過する際に、車載装置6から路上ビーコン3に対し、所定の周期(たとえば、1秒)毎の計測位置データを含む走行軌跡情報が送信され、路上ビーコン3から車載装置6に対し、交通情報センター装置4から受信した交通情報が送信される。
【0025】
図2は車載装置6の構成を示すブロック図である。記憶部600は、当該車載装置6の識別コードを記憶している。また、記憶部600は、所定の周期(たとえば、1秒)毎に、記憶部600に記憶した識別コード、時計部601が計時した時刻、GPS処理部602が計測した計測位置(緯度、経度及び高度)、インタフェース部603が取得した計測速度、方位センサ604が計測した計測方位及び計測角速度の各データ、GPS処理部602が算出したDOP(Dilution of Precision)情報、受信部608が受信したGPS信号に含まれる測位補正情報を、走行軌跡情報として記憶する。走行軌跡情報の1レコード(所定の周期毎のデータに該当)のフォーマットは表1に示す通りである。
【0026】
【表1】
【0027】
また、記憶部600は、路上ビーコン3から受信した交通情報を記憶する。時計部601は時刻を計時する。GPS処理部602は、受信部608でGPS衛星からのGPS信号を受信し、GPS信号に含まれる時刻情報、GPS衛星の軌道情報、測位補正情報に基づいて、当該車載装置6の位置(緯度、経度及び高度)を計測し、DOP情報を算出する。インタフェース部603は、車速センサ609が車輪の角速度を検出することにより計測した車両の速度を取得する。方位センサ604は、光ファイバジャイロなどで構成されており、方位及び角速度を計測する。無線部605は、記憶部600に記憶された走行軌跡情報を路上ビーコン3に送信し、路上ビーコン3から交通情報を受信する。その際、路上ビーコン3に送信された走行軌跡情報は記憶部600からクリアされる。表示部606は、記憶部600に記憶された交通情報をドライバが視認できる画像データに変換し、モニタ610に表示する。制御部607は、マイクロコンピュータにより構成されており、記憶部600、時計部601、GPS処理部602、インタフェース部603、方位センサ604、無線部605、表示部606の処理を制御する。
【0028】
図3は路上ビーコン3の構成を示すブロック図である。記憶部300は、車載装置6から受信した走行軌跡情報を記憶する。また、記憶部300は、交通情報センター装置4から受信した交通情報を記憶する。時計部301は時刻を計時する。無線部302は、車載装置6から走行軌跡情報を受信する。また、無線部302は、車載装置6に交通情報を送信する。通信部303は、記憶部300に記憶した走行軌跡情報を、通信回線5を介して交通情報センター装置4に送信する。また、通信部303は、交通情報センター装置4から、通信回線5を介して交通情報を受信する。制御部304は、マイクロコンピュータにより構成されており、記憶部300、時計部301、無線部302、通信部303の処理を制御する。
【0029】
図4は交通情報センター装置4の構成を示すブロック図である。記憶部400は、地図データベースを記憶している。地図データベースには、道路に関する道路地図データ、ビルや住宅、高速道路の遮蔽板等の建造物に関する建造物データが含まれている。道路地図データには、道路を所定の長さに区分けした走行区間であるリンクの始端、終端及びその間の複数の補間点(道路が折れ曲がる地点に対応)に関する位置(緯度、経度及び高度)のデータ、リンクの車線数のデータ、リンク同士の接続に関するデータ等が含まれている。リンクは、例えば、道路に沿った2つの路上ビーコン3の間の区間を100m毎に区分けして設定される。また、建造物データには、ビルや住宅、高速道路の遮蔽板等の建造物の底面部分の各頂点の位置(経度、経度及び高度)のデータ及びこれらの建造物の高さのデータ等が含まれている。
【0030】
また、記憶部400は、受信部408が受信したGPS信号に含まれるGPS衛星の軌道情報を記憶する。この軌道情報は、複数個存在するGPS衛星のそれぞれについて、時刻と位置(緯度、経度及び高度)を対応付けた対応データである。また、記憶部400は、路上ビーコン3から通信回線5を介して受信した走行軌跡情報を、走行軌跡受信情報として記憶する。また、記憶部400は、所定の周期(たとえば、1分)毎にそれぞれのリンクがマルチパスの影響を受けやすいリンクであるか否かを示すデータである、リンク−マルチパス対応データを記憶している。リンク−マルチパス対応データの1レコード(所定の周期毎、リンク毎のデータに該当)のフォーマットは表2に示す通りである。
【0031】
【表2】
【0032】
このリンク−マルチパス対応データは、GPS衛星の軌道情報、道路地図データ及び建造物データに基づいて、次のような手順でマルチパス判定部406によって予め作成されたものである。まず、GPS衛星の軌道情報と道路地図データに含まれるリンクの始端、終端、補間点の位置データとに基づいて、上述の所定の周期毎の時刻に、それぞれのリンクにおいて、GPS信号を受信できるGPS衛星を特定する。次に、これらのGPS衛星のそれぞれの位置と、リンクの始端、終端、補間点のそれぞれの位置と、建造物データに含まれるリンクの周辺の建造物の位置や高さのデータとに基づいて、これらのGPS衛星からリンクの始端、終端、補間点のそれぞれへの直接波と反射波のそれぞれの伝搬経路を推定する。そして、直接波と反射波の伝搬経路の長さを求め、反射波が逆位相に等しく干渉しているか否かを判定して、リンクの始端、終端、補間点のいずれかにおいて反射波が逆位相に等しく干渉していればマルチパスの影響有り(1)、そうでなければマルチパスの影響無し(0)、を設定する。
【0033】
また、記憶部400は、所定の周期(たとえば、1分)毎に車両100が各リンクの各車線を走行した場合の、車両100の実際の走行位置に対する車載装置6の計測位置のばらつきの範囲を示すデータである、車線−ばらつき対応データを記憶している。車線−ばらつき対応データの1レコード(所定の周期毎、リンク毎、車線毎のデータに該当)のフォーマットは表3に示す通りである。なお、車線番号は走行方向(リンクの始端から終端への方向。以下同じ。)に対して左側から順に1、2、3・・・とする。
【0034】
【表3】
【0035】
この車線−ばらつき対応データは、次のような手順でマルチパス判定部406によって予め作成されたものである。まず、GPS衛星の軌道情報と道路地図データに含まれるリンクの始端、終端、補間点の位置データとに基づいて、上述の所定の周期毎の時刻に、それぞれのリンクにおいて、GPS信号を受信できるGPS衛星を特定する。
【0036】
次に、リンクのそれぞれの車線において、車両100が所定の速度(たとえば、時速60km)で走行した場合に車両100が通過する位置を、リンクの始端、終端、補間点の位置データとリンクの車線数とに基づいて、走行予想位置として算出する。
【0037】
図10〜12は、走行予想位置の算出を説明するための図である。例えば、リンクの第1車線については、図10の△印に示すように、リンクの隣接する補間点同士を結ぶ線分(リンクの始端とそれに隣り合う補間点を結ぶ線分、リンクの終端とそれに隣り合う補間点を結ぶ線分を含む。以下、同じ。)から車線の幅である3.5mだけ走行方向に対して左側にずらし、16.7mの間隔を空けて、走行予想位置を算出する。また、同リンクの第2車線については、図11の△印に示すように、リンクの隣接する補間点同士を結ぶ線分上にのるようにし、16.7mの間隔を空けて、走行予想位置を算出する。また、同リンクの第3車線については、図12の△印に示すように、リンクの隣接する補間点同士を結ぶ線分から3.5mだけ走行方向に対して右側にずらし、16.7mの間隔を空けて、走行予想位置を算出する。
【0038】
次に、リンクのそれぞれの車線において、それぞれの走行予想位置と特定した複数のGPS衛星のそれぞれの位置とを直線で結び、これらの直線上に存在する高速道路の遮蔽板やビル等の建造物によるマルチパスの影響を考慮して、この走行予想位置で車載装置6が計測するであろう計測位置を予測し、予測した計測位置とリンクまでの距離を算出する。すなわち、予測した計測位置から、リンクの隣り合う補間点同士を結ぶ線分のうちで直近の線分に対して垂線を下ろし、その垂線の長さを求め、その長さに符号を付してリンクまでの距離とする。符号は、予測した計測位置が線分の走行方向に対して左側にある場合は負(マイナス)とし、右側にある場合は正(プラス)とする。予測した計測位置からリンクの直近の線分に対して垂線を下ろすことができない場合には、予測した計測位置からリンクの直近の線分の両端の補間点(始端、終端を含む。以下同じ。)までの直線距離を求め、そのうちの短い方の長さに符号を付してリンクまでの距離として求める。符号は上述の通りである。そして、予測した計測位置とリンクまでの距離の標準偏差を求め、計測位置のばらつきとする。
【0039】
次に、それぞれの車線の計測位置のばらつきと、隣接する車線の計測位置のばらつきの平均値とに基づいて、それぞれの車線の計測位置のばらつきの上限値と下限値を決定する。例えば、3車線の場合には、第1車線の計測位置のばらつきの上限値と第2車線の計測位置のばらつきの下限値を、第1車線の計測位置のばらつきと第2車線の計測位置のばらつきとの平均値とし、第2車線の計測位置のばらつきの上限値と第3車線の計測位置のばらつきの下限値を第2車線の計測位置のばらつきと第3車線の計測位置のばらつきとの平均値とする。第1車線の計測位置のばらつきの下限値は、第1車線の計測位置のばらつきから、第1車線の計測位置のばらつきの上限値と第1車線の計測位置のばらつきとの差の絶対値を引いた値とする。第3車線の計測位置のばらつきの上限値は、第3車線の計測位置のばらつきに、第3車線の計測位置のばらつきの下限値と第3車線の計測位置のばらつきとの差の絶対値を加えた値とする。
【0040】
時計部401は時刻を計時する。GPS処理部402は、受信部408でGPS衛星からのGPS信号を受信する。通信部403は、路上ビーコン3から通信回線5を介して走行軌跡情報を受信する。走行軌跡解析部404は、マイクロコンピュータにより構成されており、後述する走行軌跡解析の処理を実現し、走行軌跡受信情報の計測位置データのばらつきに基づいて、車両100の道路の幅方向の走行位置を推定する。交通情報提供部405は、マイクロコンピュータにより構成されており、後述する交通情報提供の処理を実現する。マルチパス判定部406は、マイクロコンピュータにより構成されており、上述のリンク−マルチパス対応データ及び車線−ばらつき対応データを作成する。制御部407は、マイクロコンピュータにより構成されており、記憶部400、時計部401、GPS処理部402、通信部403、走行軌跡解析部404、交通情報提供部405、マルチパス判定部406の処理を制御する。
【0041】
次に、交通情報センター装置4の処理手順について説明する。図5および図6は走行軌跡解析の処理手順を示すフローチャートである。走行軌跡解析部404は、処理周期(例えば、1秒)が経過したか否かを判定し(ステップS1)、経過したと判定した場合には(ステップS1でYES)、処理終了指令の有無を判定する(ステップS2)。経過していないと判定した場合には(ステップS1でNO)、走行軌跡解析部404は、ステップS1の処理を続ける。
【0042】
走行軌跡解析部404は、処理終了指令があると判定した場合には(ステップS2でYES)、処理を終了する。処理終了指令がないと判定した場合には(ステップS2でNO)、走行軌跡解析部404は、路上ビーコン3から走行軌跡情報を受信したか否かを判定し(ステップS3)、受信したと判定した場合には(ステップS3でYES)、記憶部400は受信した走行軌跡情報を走行軌跡受信情報として記憶する。走行軌跡受信情報の1レコードのフォーマットは、走行軌跡情報の1レコードのフォーマットと同じである(ステップS4)。受信していないと判定した場合には(ステップS3でNO)、走行軌跡解析部404は、ステップS1の処理を続ける。
【0043】
走行軌跡解析部404は、記憶部400に記憶した走行軌跡受信情報のレコードを、レコードに含まれる時刻の早い順に1つ参照する(ステップS5)。走行軌跡解析部404は、そのレコードに含まれる計測位置から、道路地図データに含まれるすべてのリンクの、すべての隣り合う補間点同士を結ぶ線分に対して垂線を下ろし、その垂線の長さを線分までの距離とする。計測位置から線分に対して垂線を下ろすことができない場合には、計測位置から線分の両端の補間点までの直線距離を求め、そのうちの短い方を線分までの距離とする。そして、線分までの距離が最短となる線分のそれぞれの補間点が属するリンクを走行リンクと特定する。このとき同時に、最短となった線分までの距離が、計測位置から走行リンクまでの距離として求まることになる(ステップS6)。
【0044】
走行軌跡解析部404は、特定した走行リンクの番号と前回のステップS6で特定した走行リンクの番号とを比較し、異なっていれば走行リンクが切り替わったと判定し、同じであれば走行リンクが切り替わっていないと判定する(ステップS7)。走行リンクが切り替わったと判定した場合には(ステップS7でYES)、走行軌跡解析部404は、走行リンクが切り替わるまでステップS6で求めた計測位置から切り替わり前の走行リンクまでの距離について、標準偏差を算出し、この標準偏差を切り替わり前の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、実際の走行位置に対する計測位置のばらつきとする(ステップS8)。走行リンクが切り替わっていないと判定した場合には(ステップS7でNO)、走行軌跡解析部404は、ステップS5の処理を続ける。
【0045】
走行軌跡解析部404は、ステップS6で切り替わり前の走行リンクが特定されている間にステップS5で参照したレコードに含まれる計測方位について、変化の範囲を算出する(ステップS9)。走行軌跡解析部404は、後述する走行位置推定1の処理に基づいて、切り替わり前の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、道路の幅方向の走行位置、すなわち、走行車線を推定する(ステップS10)。記憶部400は、切り替わり前の走行リンクの番号、当該走行軌跡受信情報の識別コード、ステップS8で求めた計測位置のばらつき、ステップS10で推定した走行車線の番号、走行リンクが切り替わるまでステップS5で参照したレコードに含まれる時刻のうちで最初と最後の時刻を、走行リンク情報として記憶部400に記録する(ステップS11)。走行リンク情報の1レコード(ステップS11の処理毎に記憶するデータに該当)のフォーマットは表4の通りである。
【0046】
【表4】
【0047】
走行軌跡解析部404は、走行軌跡受信情報の全てのレコードを参照したか否かを判定し(ステップS12)、全てのレコードを参照したと判定した場合には(ステップS12でYES)、走行リンクの切り替わりに該当するとみなして、これまでにステップS6で求めた計測位置から現在の走行リンクまでの距離について、標準偏差を算出し、この標準偏差を現在の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、実際の走行位置に対する計測位置のばらつきとする(ステップS13)。全てのレコードを参照していないと判定した場合には(ステップS13でNO)、走行軌跡解析部404は、ステップS5の処理を続ける。
【0048】
走行軌跡解析部404は、ステップS6で現在の走行リンクが特定されている間にステップS5で参照したレコードに含まれる計測方位について、変化の範囲を算出する(ステップS14)。走行軌跡解析部404は、後述する走行位置推定2の処理に基づいて、現在の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、道路の幅方向の走行位置、すなわち、走行車線を推定する(ステップS15)。記憶部400は、現在の走行リンクの番号、当該走行軌跡受信情報の識別コード、ステップS13で求めた計測位置のばらつき、ステップS15で推定した走行車線の番号、ステップS6で現在の走行リンクが特定されている間にステップS5で参照したレコードに含まれる時刻のうちで最初と最後の時刻を、走行リンク情報として記憶部400に記録する(ステップS16)。走行軌跡解析部404は、ステップS1の処理を続ける。
【0049】
図7は走行位置推定1の処理手順を示すフローチャートである。走行軌跡解析部404は、ステップS6(図5)で特定された切り替わり前の走行リンクがマルチパスの影響があるリンクであるか否かを判定する。すなわち、記憶部400に記憶したリンク−マルチパス対応データから、「時刻」がステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値との差の絶対値が30秒以内であり、「リンク番号」が切り替わり前の走行リンクの番号に一致するレコードを抽出して、このレコードのマルチパス影響の有無を参照する(ステップS101)。
【0050】
切り替わり前の走行リンクがマルチパスの影響があるリンクであった場合には(ステップS101でYES)、走行軌跡解析部404は、切り替わり前の走行リンクの上流において、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の計測位置のばらつきが安定しているか否かを判定する。すなわち、記憶部400に記憶している走行リンク情報から、「走行リンク番号」が切り替わり前の走行リンクの上流側に接続するリンクの番号に一致し、「識別コード」が当該走行軌跡受信情報の識別コードに一致し、「時刻(最初)」と「時刻(最後)」が、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値から、所定時間(例えば、10分間)前までに含まれているレコードを抽出し、そのレコードに含まれる計測位置のばらつきを参照する。さらに、走行リンク情報から、「走行リンク番号」がその上流側に接続するリンクのさらに上流側に接続するリンクの番号に一致し、「識別コード」が当該走行軌跡受信情報の識別コードに一致し、「時刻(最初)」と「時刻(最後)」が、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値から、所定時間前までに含まれているレコードを抽出し、そのレコードに含まれる計測位置のばらつきを参照する。これを、上流側に接続するリンクの長さの合計が所定の長さ(例えば、5km)以上となるまで繰り返し、これらのリンクにおける計測位置のばらつきの平均値を算出する。そして、その平均値が所定の閾値以下となっていれば、切り替わり前の走行リンクの上流において計測位置のばらつきが安定していると判定し、所定の閾値より大きければ、切り替わり前の走行リンクの上流においてばらつきが安定していないと判定する(ステップS102)。
【0051】
切り替わり前の走行リンクがマルチパスの影響があるリンクでない場合には(ステップS101でNO)、走行軌跡解析部404は、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、道路の幅方向の走行位置、すなわち、走行車線を推定する。マルチパスの影響がないのであれば、計測位置は誤差を含んでいないと推定できるので、計測位置から正確に当該車両が走行した車線を推定できるからである。
【0052】
図10〜図12に示したように、道路地図データにおけるリンクの始端、終端、補間点の幅方向の位置はリンクのほぼ中央となっているため、計測位置と道路地図データにおける切り替わり前の走行リンクの始端、終端、補間点の位置との関係から、計測位置が切り替わり前の走行リンクの走行方向に対して右側又は左側のいずれにあるかを判定できる。そして、その判定結果とステップS6(図5)で算出した計測位置から切り替わり前の走行リンクまでの距離とに基づいて、当該車両100が走行した車線を推定する。
【0053】
例えば、切り替わり前の走行リンクが3車線であって、計測位置が切り替わり前の走行リンクの右側にあり、計測位置から切り替わり前の走行リンクまでの距離が車線の幅に相当する3.5mであれば、当該車両が走行した車線は第1車線であると推定する。また、同様に、計測位置が切り替わり前の走行リンクの右側にあり、計測位置から切り替わり前の走行リンクまでの距離が0.1mであれば、当該車両が走行した車線は第2車線であると推定でき、計測位置が切り替わり前の走行リンクの左側にあり、計測位置から切り替わり前の走行リンクまでの距離が3.5mであれば、当該車両が走行した車線は第3車線であると推定する(ステップS105)。
【0054】
走行リンクの上流において計測位置のばらつきが安定していると判定した場合には(ステップS102でYES)、走行軌跡解析部404は、ステップS9(図6)で算出した計測方位の変化の範囲が所定の閾値(例えば、30°)以下であるか否かを判定する(ステップS103)。走行リンクの上流において計測位置のばらつきが安定していないと判定した場合には(ステップS102でNO)、走行軌跡解析部404は、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて当該車両100が走行した車線を推定する(ステップS105)。これは次の理由による。すなわち、5kmもの十分に長い区間にわたって計測位置のばらつきが安定していないということは、マルチパスの影響の有無にかかわらず当該車両100の車載装置6の計測位置の精度が悪い、あるいは、当該車両100は車線変更を頻繁に行う車両である、と推定できる。従って、切り替わり前の走行リンクにおける計測位置のばらつきも、これらの原因に基づいていると推定でき、ステップS104の計測位置のばらつきによる当該車両100の走行車線の推定を行うと、正しく推定できないおそれがある。
【0055】
計測方位の変化の範囲が所定の閾値以下であると判定した場合には(ステップS103でYES)、走行軌跡解析部404は、ステップS8(図5)で算出した計測位置のばらつきに基づいて、当該車両100が走行した車線の推定を行う。すなわち、記憶部400に記憶した車線−ばらつき対応データから、「時刻」以上「時刻」に1分を加えた時刻未満の範囲内に、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値が含まれ、「リンク番号」が切り替わり前の走行リンクの番号と一致し、「計測位置のばらつきの下限値」以上「計測位置のばらつきの上限値」未満の範囲内に計測位置のばらつきが含まれるレコードを抽出し、そのレコードに含まれる車線番号を参照する(ステップS104)。これにより、マルチパスの影響を加味して計測位置を補正することなく、計測位置のばらつきのみから当該車両100の正確な道路の幅方向の走行位置、すなわち、走行車線を推定することができる。
【0056】
計測方位の変化の範囲が所定の閾値以下でないと判定した場合には(ステップS103でNO)、走行軌跡解析部404は、ステップS6(図5)で切り替わり前の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて当該車両100が走行した車線を推定する(ステップS105)。当該車両100は切り替わり前の走行リンクにおいて車線変更を行っている可能性が高いので、計測位置のばらつきがこの車線変更に基づいていると推定でき、ステップS104の計測位置のばらつきによる当該車両100の走行車線の推定を行うと、正しく推定できないおそれがあるためである。
【0057】
図8は走行位置推定2の処理手順を示すフローチャートである。基本的には図7に示す走行位置推定1の処理手順と同じであり、切り替わり前の走行リンクに代えて、現在の走行リンクを処理対象としている。走行軌跡解析部404は、ステップS6(図5)で特定された現在の走行リンクがマルチパスの影響があるリンクであるか否かを判定する。すなわち、記憶部400に記憶したリンク−マルチパス対応データから、「時刻」がステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値との差の絶対値が30秒以内であり、「リンク番号」が現在の走行リンクの番号に一致するレコードを抽出して、このレコードのマルチパス影響の有無を参照する(ステップS201)。
【0058】
現在の走行リンクがマルチパスの影響があるリンクであった場合には(ステップS201でYES)、走行軌跡解析部404は、現在の走行リンクの上流において、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の計測位置のばらつきが安定しているか否かを判定する。すなわち、記憶部400に記憶している走行リンク情報から、「走行リンク番号」が現在の走行リンクの上流側に接続するリンクの番号に一致し、「識別コード」が当該走行軌跡受信情報の識別コードに一致し、「時刻(最初)」と「時刻(最後)」が、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値から、所定時間(例えば、10分間)前までに含まれているレコードを抽出し、そのレコードに含まれる計測位置のばらつきを参照する。さらに、走行リンク情報から、「走行リンク番号」がその上流側に接続するリンクのさらに上流側に接続するリンクの番号に一致し、「識別コード」が当該走行軌跡受信情報の識別コードに一致し、「時刻(最初)」と「時刻(最後)」が、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値から、所定時間前までに含まれているレコードを抽出し、そのレコードに含まれる計測位置のばらつきを参照する。これを、上流側に接続するリンクの長さの合計が所定の長さ(例えば、5km)以上となるまで繰り返し、これらのリンクにおける計測位置のばらつきの平均値を算出する。そして、その平均値が所定の閾値以下となっていれば、現在の走行リンクの上流において計測位置のばらつきが安定していると判定し、所定の閾値より大きければ、現在の走行リンクの上流においてばらつきが安定していないと判定する(ステップS202)。
【0059】
現在の走行リンクがマルチパスの影響があるリンクでない場合には(ステップS201でNO)、走行軌跡解析部404は、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、道路の幅方向の走行位置、すなわち、走行車線を推定する(ステップS205)。
【0060】
走行リンクの上流において計測位置のばらつきが安定していると判定した場合には(ステップS202でYES)、走行軌跡解析部404は、ステップS14(図6)で算出した計測方位の変化の範囲が所定の閾値(例えば、30°)以下であるか否かを判定する(ステップS203)。走行リンクの上流において計測位置のばらつきが安定していないと判定した場合には(ステップS202でNO)、走行軌跡解析部404は、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて当該車両100が走行した車線を推定する(ステップS205)。
【0061】
計測方位の変化の範囲が所定の閾値以下であると判定した場合には(ステップS203でYES)、走行軌跡解析部404は、ステップS13(図6)で算出した計測位置のばらつきに基づいて、当該車両100が走行した車線の推定を行う。すなわち、記憶部400に記憶した車線−ばらつき対応データから、「時刻」以上「時刻」に1分を加えた時刻未満の範囲内に、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる時刻の平均値が含まれ、「リンク番号」が現在の走行リンクの番号と一致し、「計測位置のばらつきの下限値」以上「計測位置のばらつきの上限値」未満の範囲内に計測位置のばらつきが含まれるレコードを抽出し、そのレコードに含まれる車線番号を参照する(ステップS204)。これにより、マルチパスの影響を加味して計測位置を補正することなく、計測位置のばらつきのみから当該車両100の正確な道路の幅方向の走行位置、すなわち、走行車線を推定することができる。
【0062】
計測方位の変化の範囲が所定の閾値以下でないと判定した場合には(ステップS203でNO)、走行軌跡解析部404は、ステップS6(図5)で現在の走行リンクが特定されている間にステップS5(図5)で参照したレコードに含まれる計測位置に基づいて当該車両100が走行した車線を推定する(ステップS205)。
【0063】
図9は交通情報提供の処理手順を示すフローチャートである。交通情報提供部405は、処理周期(例えば、5分)が経過したか否かを判定し(ステップS31)、経過していると判定した場合には(ステップS31でYES)、処理終了指令の有無を判定する(ステップS32)。経過していないと判定した場合には(ステップS31でNO)、交通情報提供部405は、ステップS31の処理を続ける。
【0064】
交通情報提供部405は、処理終了指令があると判定した場合には(ステップS32でYES)、処理を終了する。処理終了指令がないと判定した場合には(ステップS32でNO)、交通情報提供部405は、記憶部400に記憶した走行リンク情報から「時刻(最後)」が現在の時刻から5分前までの間に含まれているレコードをすべて参照し、隣接する走行リンクにおいて、車線変更をしている車両が所定の割合(たとえば、90%)以上であるか否かを判定する。すなわち、「走行リンク番号」が隣接するリンクの番号であって、「識別コード」が同一であるレコードのペアを抽出し、そのペアのうちで車線番号が異なっているペアの割合を求め、その割合が所定の割合以上であるか否かを判定する(ステップS33)。車線変更をしている車両が所定の割合以上であると判定した場合には(ステップS33でYES)、交通情報提供部405は、隣接する走行リンクのうちで下流側の走行リンクに何らかの障害物が存在しているため、車両がそれを避けるべく車線変更をしている可能性が高いと推定して、道路上に障害物がある旨の警告情報を作成して、路上ビーコン3に送信し(ステップS34)、ステップS31の処理を続ける。車線変更をしている車両が所定の割合以上でないと判定した場合には(ステップS33でNO)、交通情報提供部405は、ステップS31の処理を続ける。
【0065】
実施の形態2:
上述の実施の形態1においては、計測位置から走行リンクまでの距離の標準偏差を算出し、計測位置のばらつきとするものであったが、これに限定されるものではなく、例えば、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を算出して、計測位置のばらつきとすることもできる。
【0066】
実施の形態2に係る交通情報センター装置4では、記憶部400が記憶している車線−ばらつき対応データは、次のような手順でマルチパス判定部406によって予め作成される。まず、GPS衛星の軌道情報と道路地図データに含まれるリンクの始端、終端、補間点の位置データとに基づいて、上述の所定の周期毎の時刻に、それぞれのリンクにおいて、GPS信号を受信できるGPS衛星を特定する。
【0067】
次に、リンクのそれぞれの車線において、車両100が所定の速度(たとえば、時速60km)で走行した場合に車両100が通過する位置を、リンクの始端、終端、補間点の位置データとリンクの車線数とに基づいて、走行予想位置として算出する。
【0068】
次に、リンクのそれぞれの車線において、それぞれの走行予想位置と特定した複数のGPS衛星のそれぞれの位置とを直線で結び、これらの直線上に存在する高速道路の遮蔽板やビル等の建造物によるマルチパスの影響を考慮して、この走行予想位置で車載装置6が計測するであろう計測位置を予測し、連続する2つの予測した計測位置を結ぶベクトルと次の連続する2つの予測した計測位置を結ぶベクトルとの内積をそれぞれ求める。
【0069】
図13は、実施の形態2における内積の算出を説明するための図である。例えば、図13のように、予測した計測位置が図中の◇印のようになった場合、始端に最も近いAとその次のBとを結ぶベクトルαと、Bとその次のCとを結ぶベクトルβとの内積を求め、次に、ベクトルβと、CとDとを結ぶベクトルγとの内積を求める。これを順次行い、最後に、XとYとを結ぶベクトルχと、Yと終端に最も近いZとを結ぶωとの内積を求める。そして、これらの内積の標準偏差を求め、計測位置のばらつきとする。
【0070】
次に、それぞれの車線の計測位置のばらつきと、隣接する車線の計測位置のばらつきの平均値とに基づいて、それぞれの車線の計測位置のばらつきの上限値と下限値を決定する。例えば、3車線の場合には、第1車線の計測位置のばらつきの上限値と第2車線の計測位置のばらつきの下限値を、第1車線の計測位置のばらつきと第2車線の計測位置のばらつきとの平均値とし、第2車線の計測位置のばらつきの上限値と第3車線の計測位置のばらつきの下限値を第2車線の計測位置のばらつきと第3車線の計測位置のばらつきとの平均値とする。第1車線の計測位置のばらつきの下限値は、第1車線の計測位置のばらつきから、第1車線の計測位置のばらつきの上限値と第1車線の計測位置のばらつきとの差の絶対値を引いた値とする。第3車線の計測位置のばらつきの上限値は、第3車線の計測位置のばらつきに、第3車線の計測位置のばらつきの下限値と第3車線の計測位置のばらつきとの差の絶対値を加えた値とする。
【0071】
また、実施の形態2に係る交通情報センター装置4では、図5のステップS8において、走行軌跡解析部404は、ステップS6で切り替わり前の走行リンクが特定されている間にステップS5で参照したレコードに含まれる計測位置について、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を算出して、この標準偏差を切り替わり前の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、実際の走行位置に対する計測位置のばらつきとする。なお、その他は実施の形態1と同様であるので、説明は省略する。
【0072】
実施の形態3:
上述の実施の形態2においては、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を算出して、計測位置のばらつきとするものであったが、これに限定されるものではなく、例えば、リンクの始端と終端のそれぞれに最も近い2つの計測位置を結ぶベクトルと連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を算出して、計測位置のばらつきとすることもできる。
【0073】
実施の形態3に係る交通情報センター装置4では、記憶部400が記憶している車線−ばらつき対応データは、次のような手順でマルチパス判定部406によって予め作成される。まず、GPS衛星の軌道情報と道路地図データに含まれるリンクの始端、終端、補間点の位置データとに基づいて、上述の所定の周期毎の時刻に、それぞれのリンクにおいて、GPS信号を受信できるGPS衛星を特定する。
【0074】
次に、リンクのそれぞれの車線において、車両100が所定の速度(たとえば、時速60km)で走行した場合に車両100が通過する位置を、リンクの始端、終端、補間点の位置データとリンクの車線数とに基づいて、走行予想位置として算出する。
【0075】
次に、リンクのそれぞれの車線において、それぞれの走行予想位置と特定した複数のGPS衛星のそれぞれの位置とを直線で結び、これらの直線上に存在する高速道路の遮蔽板やビル等の建造物によるマルチパスの影響を考慮して、この走行予想位置で車載装置6が計測するであろう計測位置を予測し、リンクの始端と終端のそれぞれに最も近い2つの予測した計測位置を結ぶベクトルと連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求める。
【0076】
図14は、実施の形態3における内積の算出を説明するための図である。例えば、図14のように、予測した計測位置が図中の◇印のようになった場合、始端に最も近いAと終端に最も近いZとを結ぶベクトルΩと、Aとその次のBとを結ぶベクトルαとの内積を求め、次に、ベクトルΩと、Bとその次のCとを結ぶベクトルβとの内積を求める。これを順次行い、最後に、ベクトルΩと、Yと終端に最も近いZとを結ぶωとの内積を求める。そして、これらの内積の標準偏差を求め、計測位置のばらつきとする。
【0077】
次に、それぞれの車線の計測位置のばらつきと、隣接する車線の計測位置のばらつきの平均値とに基づいて、それぞれの車線の計測位置のばらつきの上限値と下限値を決定する。例えば、3車線の場合には、第1車線の計測位置のばらつきの上限値と第2車線の計測位置のばらつきの下限値を、第1車線の計測位置のばらつきと第2車線の計測位置のばらつきとの平均値とし、第2車線の計測位置のばらつきの上限値と第3車線の計測位置のばらつきの下限値を第2車線の計測位置のばらつきと第3車線の計測位置のばらつきとの平均値とする。第1車線の計測位置のばらつきの下限値は、第1車線の計測位置のばらつきから、第1車線の計測位置のばらつきの上限値と第1車線の計測位置のばらつきとの差の絶対値を引いた値とする。第3車線の計測位置のばらつきの上限値は、第3車線の計測位置のばらつきに、第3車線の計測位置のばらつきの下限値と第3車線の計測位置のばらつきとの差の絶対値を加えた値とする。
【0078】
また、実施の形態3に係る交通情報センター装置4では、図5のステップS8において、走行軌跡解析部404は、ステップS6で切り替わり前の走行リンクが特定されている間にステップS5で参照したレコードに含まれる計測位置について、リンクの始端との距離が最も近い計測位置とリンクの終端との距離が最も近い計測位置とを結ぶベクトルと、これらのレコードを参照した順に連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を算出して、この標準偏差を切り替わり前の走行リンクにおける、当該走行軌跡受信情報の識別コードの車載装置6を搭載した車両100の、実際の走行位置に対する計測位置のばらつきとする。なお、その他は実施の形態1と同様であるので、説明は省略する。
【0079】
上述の実施の形態1〜3においては、車載装置6と交通情報センター装置4が路上ビーコン3を介して走行軌跡情報及び交通情報を送受信する構成であったが、車載装置6と交通情報センター装置4が携帯電話等を用いて直接これらの情報を送受信する構成であっても良い。
【0080】
また、上述の実施の形態1〜3においては、交通情報センター装置4にて、走行軌跡情報を解析し、車両100の道路の幅方向の走行位置を推定する構成であったが、車載装置6がさらに走行軌跡解析部404とマルチパス判定部406とを含み、車載装置6にて、走行軌跡情報を解析し、車両100の道路の幅方向の走行位置を推定する構成であっても良い。
【0081】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【図面の簡単な説明】
【0082】
【図1】本発明に係る車両走行位置推定システムの概要を示す模式図である。
【図2】車載装置6の構成を示すブロック図である。
【図3】路上ビーコン3の構成を示すブロック図である。
【図4】交通情報センター装置4の構成を示すブロック図である。
【図5】走行軌跡解析の処理手順を示すフローチャートである。
【図6】走行軌跡解析の処理手順を示すフローチャートである。
【図7】走行位置推定1の処理手順を示すフローチャートである。
【図8】走行位置推定2の処理手順を示すフローチャートである。
【図9】交通情報提供の処理手順を示すフローチャートである。
【図10】走行予想位置の算出を説明するための図である。
【図11】走行予想位置の算出を説明するための図である。
【図12】走行予想位置の算出を説明するための図である。
【図13】実施の形態2における内積の算出を説明するための図である。
【図14】実施の形態3における内積の算出を説明するための図である。
【図15】マルチパスの影響を説明するための図である。
【図16】マルチパスの影響を説明するための図である。
【符号の説明】
【0083】
1 道路
2 遮蔽板
3 路上ビーコン
4 交通情報センター装置
5 通信回線
6、6A、6B 車載装置
100、100A、100B 車載装置を搭載した車両
200 車載装置を搭載していない車両
300 記憶部
301 時計部
302 無線部
303 通信部
304 制御部
400 記憶部
401 時計部
402 GPS処理部
403 通信部
404 走行軌跡解析部
405 交通情報提供部
406 マルチパス判定部
407 制御部
408 受信部
600 記憶部
601 時計部
602 GPS処理部
603 インタフェース部
604 方位センサ
605 無線部
606 表示部
607 制御部
608 受信部
609 車速センサ
610 モニタ
【特許請求の範囲】
【請求項1】
道路を所定の長さに区分けした走行区間内を走行する車両の、道路の幅方向の走行位置を推定する車両走行位置推定システムであって、
前記走行区間において時系列に複数回計測された前記車両の計測位置データを取得する手段と、
取得した前記計測位置データに基づいて、前記走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出する第1の算出手段と、
前記第1の算出手段が算出したばらつきに基づいて前記走行区間における前記車両の、道路の幅方向の走行位置を推定する推定手段とを備えることを特徴とする車両走行位置推定システム。
【請求項2】
道路地図データを記憶する手段と、
取得した前記計測位置データに基づいて、前記道路地図データから前記走行区間の道路地図データを抽出する手段とをさらに備え、
前記第1の算出手段は、抽出した道路地図データと取得した前記計測位置データとに基づいて、それぞれの計測位置から道路までの距離を求め、それらの距離の標準偏差を前記ばらつきとして算出することを特徴とする請求項1に記載の車両走行位置推定システム。
【請求項3】
前記第1の算出手段は、取得した前記計測位置データに基づいて、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を前記ばらつきとして算出することを特徴とする請求項1に記載の車両走行位置推定システム。
【請求項4】
前記第1の算出手段は、取得した前記計測位置データに基づいて、前記走行区間の始端と終端のそれぞれに最も近い2つの計測位置を結ぶベクトルと連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を前記ばらつきとして算出することを特徴とする請求項1に記載の車両走行位置推定システム。
【請求項5】
前記計測位置データにはそれぞれの計測位置を計測した時刻が含まれ、
時刻とGPS衛星の位置とを対応付ける対応データ及び建造物データを記憶する手段と、
前記対応データと取得した前記計測位置データに含まれる時刻とに基づいて前記車両が前記走行区間を走行していた時のGPS衛星の位置を算出する手段と、
前記建造物データと取得した前記計測位置データとに基づいて、前記走行区間周辺の建造物データを抽出する手段と、
算出したGPS衛星の位置と抽出した前記走行区間の周辺の建造物データとに基づいて、当該走行区間がマルチパスの影響を受け易い走行区間であるか否かを判定する第1の判定手段とをさらに備え、
前記推定手段は、前記第1の判定手段がマルチパスの影響を受け易い走行区間であると判定した場合に、前記走行区間における前記車両の、道路の幅方向の走行位置を推定するものであることを特徴とする請求項1乃至請求項4のいずれかに記載の車両走行位置推定システム。
【請求項6】
前記走行区間において時系列に複数回計測された前記車両の計測方位データを取得する手段と、
取得した前記計測方位データに基づいて、前記走行区間における計測方位の変化が所定の範囲内であるか否かを判定する第2の判定手段とをさらに備え、
前記推定手段は、前記第2の判定手段が所定の範囲内であると判定した場合に、前記走行区間における前記車両の、道路の幅方向の走行位置を推定するものであることを特徴とする請求項1乃至請求項5のいずれかに記載の車両走行位置推定システム。
【請求項7】
前記走行区間のさらに上流の走行区間において時系列に複数回計測された前記車両の計測位置データを取得する手段と、
取得した前記上流の走行区間の計測位置データに基づいて、前記上流の走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出する第2の算出手段とをさらに備え、
前記推定手段は、前記第2の算出手段が算出したばらつきが所定の閾値以下である場合に、前記走行区間における前記車両の、道路の幅方向の走行位置を推定するものであることを特徴とする請求項1乃至請求項6のいずれかに記載の車両走行位置推定システム。
【請求項8】
道路を所定の長さに区分けした走行区間内を走行する車両の、道路の幅方向の走行位置を推定する車両走行位置推定方法であって、
前記走行区間において時系列に複数回計測された前記車両の計測位置データを取得し、
取得した前記計測位置データに基づいて、前記走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出し、
前記第1の算出手段が算出したばらつきに基づいて前記走行区間における前記車両の、道路の幅方向の走行位置を推定することを特徴とする車両走行位置推定方法。
【請求項1】
道路を所定の長さに区分けした走行区間内を走行する車両の、道路の幅方向の走行位置を推定する車両走行位置推定システムであって、
前記走行区間において時系列に複数回計測された前記車両の計測位置データを取得する手段と、
取得した前記計測位置データに基づいて、前記走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出する第1の算出手段と、
前記第1の算出手段が算出したばらつきに基づいて前記走行区間における前記車両の、道路の幅方向の走行位置を推定する推定手段とを備えることを特徴とする車両走行位置推定システム。
【請求項2】
道路地図データを記憶する手段と、
取得した前記計測位置データに基づいて、前記道路地図データから前記走行区間の道路地図データを抽出する手段とをさらに備え、
前記第1の算出手段は、抽出した道路地図データと取得した前記計測位置データとに基づいて、それぞれの計測位置から道路までの距離を求め、それらの距離の標準偏差を前記ばらつきとして算出することを特徴とする請求項1に記載の車両走行位置推定システム。
【請求項3】
前記第1の算出手段は、取得した前記計測位置データに基づいて、連続する2つの計測位置を結ぶベクトルと次の連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を前記ばらつきとして算出することを特徴とする請求項1に記載の車両走行位置推定システム。
【請求項4】
前記第1の算出手段は、取得した前記計測位置データに基づいて、前記走行区間の始端と終端のそれぞれに最も近い2つの計測位置を結ぶベクトルと連続する2つの計測位置を結ぶベクトルとの内積をそれぞれ求め、それらの内積の標準偏差を前記ばらつきとして算出することを特徴とする請求項1に記載の車両走行位置推定システム。
【請求項5】
前記計測位置データにはそれぞれの計測位置を計測した時刻が含まれ、
時刻とGPS衛星の位置とを対応付ける対応データ及び建造物データを記憶する手段と、
前記対応データと取得した前記計測位置データに含まれる時刻とに基づいて前記車両が前記走行区間を走行していた時のGPS衛星の位置を算出する手段と、
前記建造物データと取得した前記計測位置データとに基づいて、前記走行区間周辺の建造物データを抽出する手段と、
算出したGPS衛星の位置と抽出した前記走行区間の周辺の建造物データとに基づいて、当該走行区間がマルチパスの影響を受け易い走行区間であるか否かを判定する第1の判定手段とをさらに備え、
前記推定手段は、前記第1の判定手段がマルチパスの影響を受け易い走行区間であると判定した場合に、前記走行区間における前記車両の、道路の幅方向の走行位置を推定するものであることを特徴とする請求項1乃至請求項4のいずれかに記載の車両走行位置推定システム。
【請求項6】
前記走行区間において時系列に複数回計測された前記車両の計測方位データを取得する手段と、
取得した前記計測方位データに基づいて、前記走行区間における計測方位の変化が所定の範囲内であるか否かを判定する第2の判定手段とをさらに備え、
前記推定手段は、前記第2の判定手段が所定の範囲内であると判定した場合に、前記走行区間における前記車両の、道路の幅方向の走行位置を推定するものであることを特徴とする請求項1乃至請求項5のいずれかに記載の車両走行位置推定システム。
【請求項7】
前記走行区間のさらに上流の走行区間において時系列に複数回計測された前記車両の計測位置データを取得する手段と、
取得した前記上流の走行区間の計測位置データに基づいて、前記上流の走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出する第2の算出手段とをさらに備え、
前記推定手段は、前記第2の算出手段が算出したばらつきが所定の閾値以下である場合に、前記走行区間における前記車両の、道路の幅方向の走行位置を推定するものであることを特徴とする請求項1乃至請求項6のいずれかに記載の車両走行位置推定システム。
【請求項8】
道路を所定の長さに区分けした走行区間内を走行する車両の、道路の幅方向の走行位置を推定する車両走行位置推定方法であって、
前記走行区間において時系列に複数回計測された前記車両の計測位置データを取得し、
取得した前記計測位置データに基づいて、前記走行区間における前記車両の実際の走行位置に対する計測位置のばらつきを算出し、
前記第1の算出手段が算出したばらつきに基づいて前記走行区間における前記車両の、道路の幅方向の走行位置を推定することを特徴とする車両走行位置推定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2007−248321(P2007−248321A)
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願番号】特願2006−73717(P2006−73717)
【出願日】平成18年3月17日(2006.3.17)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成19年9月27日(2007.9.27)
【国際特許分類】
【出願日】平成18年3月17日(2006.3.17)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]