
車両走行制御システム
【課題】複数の曲線区間を有する走路において運転者の感覚に沿った車両の走行状態の制御が可能な車両走行制御システムを提供すること。
【解決手段】車両の走行状態を変更する走行状態変更手段と、コーナに応じて走行状態変更手段を制御する制御装置とを備え、制御装置は、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、二つの曲線区間の一方から他方に向けて直線路とみなす区間を走行する間に車両の挙動が安定すると予測される場合(S5−Y)には二つの曲線区間を互いに独立したコーナとして走行状態変更手段を制御し(S6〜S9)、走行履歴に基づき、直線路とみなす区間を走行する間に車両の挙動が安定すると予測されない場合(S5−N)には二つの曲線区間および直線路とみなす区間を一つのコーナとして走行状態変更手段を制御する(S10,S11)。
【解決手段】車両の走行状態を変更する走行状態変更手段と、コーナに応じて走行状態変更手段を制御する制御装置とを備え、制御装置は、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、二つの曲線区間の一方から他方に向けて直線路とみなす区間を走行する間に車両の挙動が安定すると予測される場合(S5−Y)には二つの曲線区間を互いに独立したコーナとして走行状態変更手段を制御し(S6〜S9)、走行履歴に基づき、直線路とみなす区間を走行する間に車両の挙動が安定すると予測されない場合(S5−N)には二つの曲線区間および直線路とみなす区間を一つのコーナとして走行状態変更手段を制御する(S10,S11)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両走行制御システムに関する。
【背景技術】
【0002】
従来、コーナに応じた車両の走行制御を行う技術が提案されている。例えば、特許文献1には、前方にカーブがある場合に、最小曲率のカーブを検出し、このカーブへの適正進入速度である限界車速を求め、走行時における車速が限界車速以上となった場合に減速制御する運転支援装置の技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−19595号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、複数の曲線区間が連続する走路における車両の走行制御を運転者の感覚に沿ったものとすることについて、なお検討の余地がある。例えば、運転者の感覚に沿う走行制御が、運転者の技量やライン取りによって異なるものとなる場合がある。
【0005】
本発明の目的は、複数の曲線区間を有する走路において運転者の感覚に沿った車両の走行状態の制御を行うことができる車両走行制御システムを提供することである。
【課題を解決するための手段】
【0006】
本発明の車両走行制御システムは、車両の走行状態を変更する走行状態変更手段と、コーナに応じて前記走行状態変更手段を制御する制御装置とを備え、前記制御装置は、直線路とみなす区間と、前記直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、前記二つの曲線区間の一方から他方に向けて前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測される場合には前記二つの曲線区間を互いに独立した前記コーナとして前記走行状態変更手段を制御し、前記走行履歴に基づき、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測されない場合には前記二つの曲線区間および前記直線路とみなす区間を一つの前記コーナとして前記走行状態変更手段を制御することを特徴とする。
【0007】
上記車両走行制御システムにおいて、前記走行状態変更手段が変更する前記走行状態とは、前記車両の車速であり、前記制御装置は、前記コーナに応じた目標車速に基づく車速制御を行うものであって、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測される場合、前記二つの曲線区間のそれぞれに対して前記目標車速を設定して前記走行状態変更手段により車速制御を行い、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測されない場合、前記二つの曲線区間および前記直線路とみなす区間の全体に対して一つの前記目標車速を設定して前記走行状態変更手段により車速制御を行うことが好ましい。
【0008】
上記車両走行制御システムにおいて、前記直線路とみなす区間とは、曲率の大きさが予め定められた所定値以下の区間であることが好ましい。
【0009】
上記車両走行制御システムにおいて、前記走行状態変更手段として、制動力を変更する制動力変更手段、自動変速機、アクティブサスペンション、加速度を変更する加速度変更手段の少なくとも一つを備えることが好ましい。
【0010】
本発明の車両走行制御システムは、車両の走行状態を変更する走行状態変更手段と、コーナに応じて前記走行状態変更手段を制御する制御装置とを備え、前記制御装置は、前記運転者の走行履歴に基づき、前方の走路における前記車両の過去の軌跡が、直線とみなす領域と、前記直線とみなす領域によって接続される二つの曲線領域とを有する場合であって、前記二つの曲線領域の一方から他方に向けて前記直線とみなす領域を走行する間に前記車両の挙動が安定すると予測される場合には前記二つの曲線領域を互いに独立した前記コーナとして前記走行状態変更手段を制御し、前記直線とみなす領域を走行する間に前記車両の挙動が安定すると予測されない場合には前記二つの曲線領域および前記直線とみなす領域を一つの前記コーナとして前記走行状態変更手段を制御することを特徴とする。
【発明の効果】
【0011】
本発明にかかる車両走行制御システムは、運転者による走行履歴に基づき、二つの曲線区間の一方から他方に向けて直線路とみなす区間を走行する間に車両の挙動が安定すると予測される場合には二つの曲線区間を互いに独立したコーナとして走行状態変更手段を制御する。一方、走行履歴に基づき、直線路とみなす区間を走行する間に車両の挙動が安定すると予測されない場合には二つの曲線区間および直線路とみなす区間を一つのコーナとして走行状態変更手段を制御する。このように、本発明にかかる車両走行制御システムによれば、コーナの認識において走行履歴が反映されることで、運転者の感覚に沿った車両の走行状態の制御を行うことができるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】図1は、実施形態の車両走行制御システムの動作を示すフローチャートである。
【図2】図2は、実施形態の車両走行制御システムが適用された車両を示す図である。
【図3】図3は、複合コーナにおける複数の走行軌跡の一例を示す図である。
【図4】図4は、過去の走行軌跡の曲率分布の一例を示す図である。
【図5】図5は、S字コーナにおける走行軌跡の曲率分布の一例を示す図である。
【発明を実施するための形態】
【0013】
以下に、本発明にかかる車両走行制御システムの一実施形態につき図面を参照しつつ詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0014】
(第1実施形態)
図1から図5を参照して、第1実施形態について説明する。本実施形態は、コーナに応じて走行状態変更手段を制御する制御装置を備える車両走行制御システムに関する。図1は、本発明にかかる車両走行制御システムの実施形態の動作を示すフローチャート、図2は、実施形態の車両走行制御システムが適用された車両を示す図である。
【0015】
本実施形態の車両走行制御システム1−1は、複雑なコーナで減速、コーナリング制御等の車両の走行制御を行う場合に、1つの複合コーナであるのか、2つ以上のコーナが連続しているのかを区別して走行制御を行う。具体的には、コーナ間の直線とみなせる区間が車両挙動が安定する距離よりも長い場合は、複数のコーナと認識してそれぞれのコーナに対する走行制御を実行し、上記区間が車両挙動が安定する距離以下である場合は、上記区間の前後のコーナを1つの複合コーナと認識して走行制御を実行する。コーナを複数と認識するか1つと認識するかは、走行履歴に基づいて判定される。これにより、運転者の走行スタイルに応じてコーナを認識することができ、運転者の感覚に沿った車両の走行制御が可能となる。
【0016】
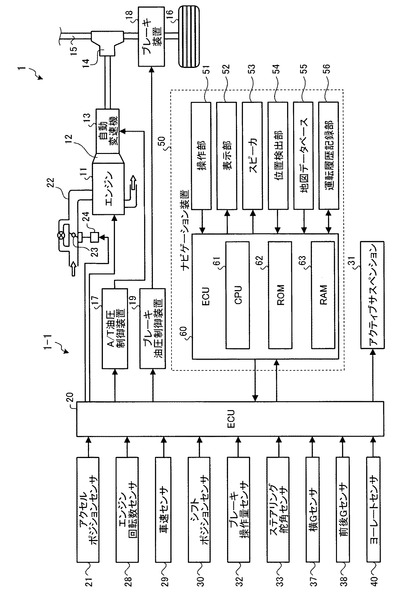
図2に示すように、車両1には、エンジン11が設けられている。エンジン11には、トルクコンバータ12を有する自動変速機13が連結されている。エンジン11の駆動力は、トルクコンバータ12を介して自動変速機13に入力され、デファレンシャルギヤ14及びドライブシャフト15を介して駆動輪16に伝達される。自動変速機13は、A/T油圧制御装置17により車両の運転状態に応じて変速比が自動的に制御される。ブレーキ装置18は、ブレーキ油圧制御装置19によって制御されて、車両を制動する。本実施形態では、ブレーキ装置18が、制動力を変更する制動力変更手段であり、車両1の走行状態を変更する走行状態変更手段として機能する。ブレーキ装置18は、制動力により車両1の車速を変更することができる。
【0017】
車両1には、エンジン11や自動変速機13やブレーキ装置18などを制御する電子制御ユニット(ECU)20が設けられている。ECU20は、エンジン11、自動変速機13(A/T油圧制御装置17)及びブレーキ装置18(ブレーキ油圧制御装置19)の総合的な制御を行う。本実施形態では、ECU20が、コーナに応じて走行状態変更手段としてのブレーキ装置18を制御する制御装置として機能する。また、エンジン11は、ECU20によって制御されて出力トルクが調節されることで、車両の加速度(駆動力)を変更する加速度変更手段として機能することができる。
【0018】
車両1には、アクセルペダルの操作量(アクセル開度)を検出するアクセルポジションセンサ21が設けられている。アクセルポジションセンサ21により検出されたアクセル開度を示す信号は、ECU20に出力される。エンジン11の吸気管22に設けられたスロットルコントロールバルブ23は、スロットルアクチュエータ24により開閉可能とされている。ECU20は、アクセル開度にかかわらずスロットルアクチュエータ24によりスロットルコントロールバルブ23のスロットル開度を制御することができる。車両1には、スロットルコントロールバルブ23の全閉状態(アイドル状態)及びスロットル開度を検出する図示しないスロットル開度センサが設けられている。スロットル開度センサによって検出されたアイドル状態及びスロットル開度のそれぞれを示す信号は、ECU20に出力される。
【0019】
エンジン11には、エンジン回転数(エンジン回転速度)を検出するエンジン回転数センサ28が設けられている。車速センサ29は、車両の車速を検出する。シフトポジションセンサ30は、運転者が操作するシフトレバーの位置(シフトポジション)を検出する。ブレーキ操作量センサ32は、ブレーキ装置18の操作量を検出する。ステアリング舵角センサ33は、運転者により操作されるステアリングの舵角を検出する。各センサ28,29,30,32,33の検出結果を示す信号は、ECU20に出力される。
【0020】
ECU20は、変速マップを有しており、スロットル開度、車速などに基づいて、自動変速機13の変速段を決定し、この決定された変速段を成立させるようにA/T油圧制御装置17を制御することができる。
【0021】
横Gセンサ37は、車両の横Gを検出し、前後Gセンサ38は、車両の前後Gを検出する。横Gセンサ37により検出された横Gを示す信号および前後Gセンサ38により検出された前後Gを示す信号のそれぞれは、ECU20に出力される。
【0022】
ヨーレートセンサ40は、車両のヨーレートを検出する。ヨーレートセンサ40により検出されたヨーレートを示す信号は、ECU20に出力される。
【0023】
ナビゲーション装置50は、自車両を所定の目的地に誘導することを基本的な機能としており、ECU60と、操作部51と、表示部52と、スピーカ53と、位置検出部54と、地図データベース55と、運転履歴記録部56とを備えている。ナビゲーション装置50のECU60は、ECU20と双方向の通信が可能である。
【0024】
ECU60のCPU61は、入力された情報に基づいて、ナビゲーション処理等の各種演算処理を行う。ECU60のROM62には、目的地までの経路の検索、経路中の走行案内、特定区間の決定等を行うための各種プログラムが格納されている。RAM63は、読み書き可能なメモリである。
【0025】
位置検出部54は、GPSレシーバ、地磁気センサ、距離センサ、ビーコンセンサ、及びジャイロセンサを備えている。位置検出部54は、自車の位置を検出し、その検出した自車の位置を示すデータをECU60に出力する。
【0026】
地図データベース55には、車両の走行に必要な情報(地図、直線路、カーブ、登降坂、高速道路など)が記憶されている。地図データベース55は、地図データファイル、交差点データファイル、ノードデータファイル、道路データファイルを備えている。ECU60は、地図データベース55を参照して、必要な情報を読み出す。また、ECU20は、レーダ等によって先行車の有無を判断して本実施形態の制御のON/OFFを切替えることも可能である。
【0027】
車両1には、アクティブサスペンション31が設けられている。アクティブサスペンション31は、アクチュエータによりサスペンション特性を変化させることが可能なものであり、車両1のロール剛性を可変に制御することができる。なお、車両1は、アクティブサスペンションに代えて、ロール剛性を可変に制御できる他の装置(例えば、アクティブスタビライザ)を備えてもよい。アクティブサスペンション31は、ECU20に接続されており、ECU20によって制御される。本実施形態の車両走行制御システム1−1は、ECU20およびブレーキ油圧制御装置19を含む。
【0028】
ECU20は、コーナに応じた車両1の走行制御(コーナ制御)を実行することができる。本実施形態のECU20は、車両前方のコーナに対してブレーキ補助による減速制御を実行する。ECU20は、前方のコーナの曲率に基づき、コーナ走行時の目標車速を決定し、コーナに対して設定される制御目標位置(例えば、コーナ手前)において車速が目標車速となるようにブレーキ装置18を制御して車速制御を行うことで、運転者の制動操作を補助する。なお、本実施形態では、ECU20は、前方の走路における過去の走行軌跡に応じた目標車速に基づく車速制御を実行する。
【0029】
ここで、複数の曲線区間が連続する走路(複合コーナ)における走行制御を運転者の感覚に沿ったものとすることについて、従来十分な検討がなされていなかった。例えば、複数の曲線区間が連続するような複合コーナにおいて、1つの曲線区間に対してしかコーナ制御を行えない走行制御では、運転者の感覚と合わないことがある。また、複合コーナを認識してコーナ制御を行うものであっても、運転者の感覚に沿った制御とならない場合がある。これは、以下に図3を参照して説明するように、車速や運転者の技量(走行スタイル)等によって適切な制御目標値が変わってくることがあるためである。
【0030】
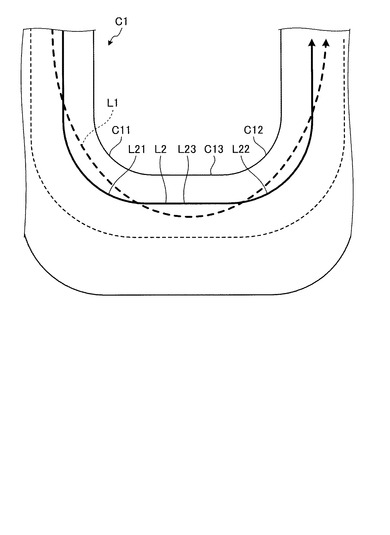
図3は、複合コーナにおける複数の走行軌跡の一例を示す図である。図3において、符号C1は、複合コーナを示す。複合コーナC1では、第一コーナ(曲線区間)C11と第二コーナ(曲線区間)C12とが短い直線路(直線路とみなす区間)C13によって接続されている。複合コーナC1において、破線L1で示す経路のように第一コーナC11、直線路C13および第二コーナC12に対して一つのコーナを走行するかのようにライン取りする運転者と、実線L2で示す経路のように第一コーナC11および第二コーナC12のそれぞれについて独立したコーナとしてライン取りする運転者がある。また、複合コーナC1を走行するときに車速によってもライン取りが異なることがある。このような複合コーナC1において、複数のコーナとして認識して走行制御すべきか、1つのコーナとして認識して走行制御すべきかの判断が適切でないと、運転者に違和感を与えることがある。
【0031】
さらに、実線L2に沿って車両1を走行させる運転者であっても、コーナにおける通過速度によって、第一コーナC11および第二コーナC12のそれぞれに対して減速制御を実行できるか否かが異なる場合がある。これは、直線路C13を走行する間に車両1の挙動が安定するか否かが直線路C13における通過速度によって変わるものであるためである。したがって、前方の二つのコーナC11,C12を互いに独立したコーナとみなして減速制御を実行することと、第一コーナC11,第二コーナC12および直線路C13を一つのコーナとみなして減速制御を実行することのいずれが適切であるかは、運転者の走行スタイルによって変わる。
【0032】
また、例えばS字状の複合コーナ等において、走路の形状としては曲線であっても、運転者が直線のライン取りをして走行する場合がある。この場合、走路の形状では直線路とみなす区間が存在しない場合であっても、走行軌跡では直線とみなす領域が存在し、その領域を走行する間に車両の挙動が安定することもある。したがって、こうした直線とみなす領域が存在する場合、その領域の手前側と奥側とで異なるコーナとして走行制御を行うことが可能である。
【0033】
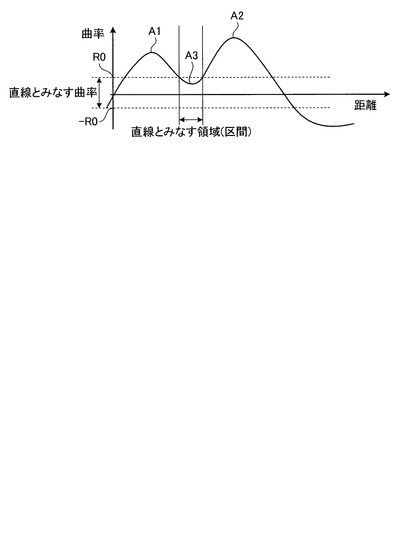
本実施形態では、ECU20は、運転者の走行履歴に基づき、前方の走路を過去に走行したときの車両1の軌跡に応じて、減速制御の態様を決定する。具体的には、ECU20は、前方の走路における過去の走行軌跡の曲率データと、通過速度とに基づいて、前方の走路を一つのコーナとみなして減速制御を行うか、複数のコーナとみなしてそれぞれのコーナに対して減速制御を行うかを判断する。図4は、過去の走行軌跡の曲率分布の一例を示す図である。図4には、図3に示す複合コーナC1における走行軌跡の進行方向に沿った曲率の分布図が示されている。走行軌跡の曲率は、運転者によって、あるいは同一の運転者であっても通過速度等によって異なる分布となり得るものである。例えば、破線L1の経路に沿って車両1を走行させる運転者と、実線L2で示す経路に沿って車両1を走行させる運転者とでは、曲率の分布は異なるものとなる。図4に示す曲率の分布は、実線L2で示す経路(軌跡)に沿って車両1を走行させる運転者に関するものであり、複合コーナC1を走行するときに学習されたものである。
【0034】
ECU20は、走行軌跡において、曲率の大きさが予め定められた閾値(所定値)以下である領域を「直線とみなす領域」として設定する。具体的には、進行方向に対して一方側に湾曲する軌跡の曲率を正、他方側に湾曲する軌跡の曲率を負とした場合に、曲率の絶対値が閾値(R0)以下である領域が直線とみなす領域と判定される。また、走行軌跡において曲率の絶対値が閾値よりも大きな領域が曲線領域と判定される。図4において、符号A3は、直線とみなす領域に対応し、この直線とみなす領域は、図3において符号L23で示されている。また、符号A1,A2は、図3における符号L21,L22で示す曲線領域にそれぞれ対応している。ECU20は、このように、前方の走路における車両1の過去の軌跡L2が、直線とみなす領域L23と、直線とみなす領域L23によって接続される二つの曲線領域L21,L22とを有する場合、二つの曲線領域L21,L22の一方から他方に向けて直線とみなす領域L23の走路を走行する間に車両1の挙動が安定するか否かを予測する。その結果、挙動が安定すると予測される場合には二つの曲線領域L21,L22を互いに独立したコーナとしてブレーキ装置18を制御して減速制御を実行し、挙動が安定すると予測されない場合には二つの曲線領域L21,L22および直線とみなす領域L23を一つのコーナとしてブレーキ装置18を制御して減速制御を実行する。これにより、運転者の感覚に沿った車両の走行制御を行うことが可能となる。
【0035】
なお、前方の走路の曲率として、学習された走行軌跡の曲率データに代えて、前方の走路の形状の曲率が用いられてもよい。前方の走路の形状の曲率は、例えば、ナビゲーション装置50の地図データベース55に予め記憶された情報等から取得するようにすればよい。このように前方の走路の曲率として、走路の形状の曲率を用いる場合、上記「直線とみなす領域」は前方の走路における「直線路とみなす区間」と、上記「曲線領域」は前方の走路における「曲線区間」とすればよい。直線路とみなす区間の判定方法は、直線とみなす領域の判定方法と同様とすることができる。前方の走路の形状の曲率を用いる場合、少なくとも前方の走路の通過速度に関する走行履歴があれば、運転者の走行スタイルに応じてコーナを複数と認識するか一つと認識するかを判断することができる。また、前方の走路と類似の走路に関する通過速度の走行履歴を用いて前方の走路の通過速度を予測することも可能である。
【0036】
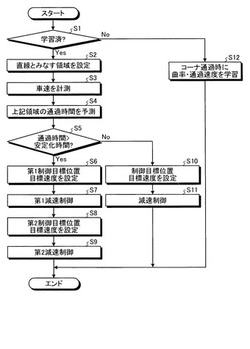
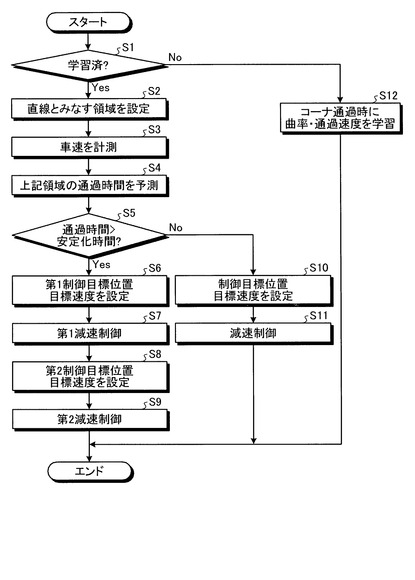
図1を参照して、本実施形態の車両の走行制御について説明する。図1に示す制御フローは、車両1の前方の走路に対して、その前方の走路における過去の走行軌跡が、直線とみなす領域と、直線とみなす領域によって接続される二つの曲線領域とを有すると認識した場合に実行される。直線とみなす領域は、曲率0の直線領域を含んでいてもよい。曲率の大きさの閾値である上記所定値は、例えば、走行時に車両1の挙動が安定する曲率の範囲に基づくものである。上記所定値は、例えば、挙動が安定したまま車両1が走行し続けることのできる曲率の大きさとして予め実験結果等に基づいて決められている。なお、車両1の挙動が安定しているとは、例えば、車両1のロールの大きさが所定ロール量以下であることである。この場合、曲率の大きさが上記所定値よりも小さな走路であれば、その走路を走行する際の横Gで生じる車両1のロールの大きさは、所定ロール量以下となる。
【0037】
ステップS1では、ECU20により、前方に認識した走路について既に学習済みであるか否かが判定される。前方の走路を実際に走行して曲率データおよび走路走行時の速度変化を学習したか否かが判定される。この学習結果は、ナビゲーション装置50の運転履歴記録部56に記憶されている。ステップS1の判定の結果、前方に認識した走路について学習済みであると判定された場合(ステップS1−Y)にはステップS2に進み、そうでない場合(ステップS1−N)にはステップS12に進む。
【0038】
ステップS2では、ECU20により、直線とみなす領域が設定される。ECU20は、運転履歴記録部56に記憶された、前方の走路に関する過去の走行軌跡の曲率データを取得する。この曲率データは、例えば、進行方向に沿った軌跡上の各点の曲率の値でもよく、軌跡を複数の区間に区切った場合の各区間の曲率の値であってもよい。ECU20は、曲率データに基づいて、進行方向に沿った走路の曲率の分布を予測する。ECU20は曲率の予測結果に基づいて、走行軌跡において、曲率の大きさが予め定められた閾値以下である領域を「直線とみなす領域」として設定する。
【0039】
次に、ステップS3では、ECU20により、車速が計測される。ECU20は、車速センサ29の検出結果を示す信号により前方の走路に進入する前の現在車速を計測する。
【0040】
次に、ステップS4では、ECU20により、直線とみなす領域の通過時間が予測される。ECU20は、運転履歴記録部56に記憶された、過去に同一の走路を走行したときの速度変化の学習結果を取得し、ステップS3で計測した走路進入前の現在車速に基づき、前方の走路を通過するときの通過速度(軌跡に沿った速度の推移)を予測する。なお、同一の走路における学習結果に代えて、他のコーナを通過したときのそのコーナの曲率と通過車速との関係に基づいて前方の走路の通過速度を予測するようにしてもよい。ECU20は、予測された前方の走路の通過速度と、ステップS2で設定された「直線とみなす領域」の長さとに基づき、下記式(1)により直線とみなす領域を通過するときの所要時間(通過時間)を予測する。
通過時間 = 直線とみなす領域の長さ ÷ 通過速度 (1)
【0041】
次に、ステップS5では、ECU20により、直線とみなす領域の通過時間が、車両挙動の安定化時間よりも大であるか否かが判定される。ECU20は、直線とみなす領域に入ってから、車両挙動が安定化するまでに要する時間(以下、単に「安定化時間」と記載する。)を求めるための情報を予め記憶している。安定化時間は、走路通過時の横G、車両質量、車両1の重心高、サスペンション特性等によって決まるものであり、予め実験等に基づき、各パラメータの組合せと安定化時間との関係が求められる。走路通過時の横Gは、ステップS4で予測された前方の走路の通過速度と、前方の走路に関する走行軌跡の曲率データとに基づいて算出することができる。
【0042】
ECU20は、各パラメータと安定化時間との関係を例えばマップとして記憶しており、そのマップを参照して、安定化時間を算出する。本実施形態では、「車両挙動が安定化する」とは、車両1のロールの大きさが所定ロール量以下となることである。なお、これに限らず、他の車両挙動に関する値に基づいて、安定化時間が決められてもよい。ステップS5の判定の結果、直線とみなす領域の通過時間が、車両挙動の安定化時間よりも大である(直線とみなす領域を走行する間に、車両挙動が安定する)と判定された場合(ステップS5−Y)には、ステップS6に進み、そうでない場合(ステップS5−N)にはステップS10に進む。
【0043】
ステップS6からステップS9では、ECU20は、前方の走路に関する走行軌跡における複数の曲線領域を「直線とみなす領域」を挟む互いに独立したコーナとして減速制御を実行する。図3に示すコーナを例に説明すると、ECU20は、曲線領域L21と曲線領域L22とを直線とみなす領域L23を挟んで互いに独立したコーナとみなし、直線とみなす領域L23よりも手前側の曲線領域L21および直線とみなす領域L23よりも奥側の曲線領域L22のそれぞれに対して目標車速(目標速度)を設定する。ECU20は、それぞれの目標車速に基づき、曲線領域L21に対するブレーキ装置18による車速制御(後述する第一減速制御)および曲線領域L22に対するブレーキ装置18による車速制御(後述する第二減速制御)を順に実行する。
【0044】
ステップS6では、ECU20により、第1減速制御の制御目標位置P1および目標速度V1が設定される。この制御目標位置P1および目標速度V1は、曲線領域L21に対する減速制御である第1減速制御の制御目標である。第1減速制御では、曲線領域L21に対して設定される制御目標位置P1における車速を目標速度V1とするように減速制御がなされる。制御目標位置P1および目標速度V1が設定されると、ステップS7に進み、第1減速制御が実行される。第1減速制御では、ECU20は、制御目標位置P1において目標速度V1を実現するように、ブレーキ油圧制御装置19を制御する。なお、減速制御の内容は、これには限定されず、自動変速機13の変速制御や、エンジン11のエンジンブレーキ力の制御による減速制御がなされてもよい。ステップS7が実行されると、ステップS8に進む。
【0045】
ステップS8では、ECU20により、第2減速制御の制御目標位置P2および目標速度V2が設定される。この第2減速制御の制御目標位置P2および目標速度V2は、曲線領域L22に対する減速制御である第2減速制御の制御目標である。
【0046】
次に、ステップS9では、ECU20により、第2減速制御が実行される。ECU20は、制御目標位置P2において目標速度V2を実現するように、ブレーキ油圧制御装置19を制御する。ステップS9が実行されると、本制御フローは終了する。
【0047】
ステップS5において否定判定がなされてステップS10に進むと、ステップS10ではECU20により、減速制御の制御目標位置P3および目標速度V3が設定される。ECU20は、二つの曲線領域L21,L22および直線とみなす領域L23を一つのコーナとみなし、この一つのコーナの全体に対して制御目標位置P3および目標速度V3を設定する。つまり、複合コーナC1に対して一つの制御目標位置P3および目標速度V3が設定される。目標速度V3は、例えば、曲線領域L21および曲線領域L22のうち曲率が大きい方の曲線領域に基づいて設定される。
【0048】
次に、ステップS11では、ECU20により、減速制御がなされる。ECU20は、ステップS10で設定された制御目標位置P3において目標速度V3を実現するように、ブレーキ油圧制御装置19による車速制御を実行する。ステップS11が実行されると、本制御フローは終了する。
【0049】
ステップS1において否定判定がなされてステップS12に進むと、ステップS12では、ECU20により走路通過時に軌跡、曲率および通過速度が学習される。ECU20は、GPSやINS(慣性航法システム)等で自車両位置を測位しながら車両1の走行位置の軌跡(座標値)および軌跡上の各点の曲率・通過速度を学習する。曲率は、例えば、車速センサ29、ステアリング舵角センサ33、横Gセンサ37、ヨーレートセンサ40等の検出結果に基づいて算出されてもよく、測位結果の軌跡の座標データに基づいて算出されてもよい。この軌跡、曲率および通過速度の学習は、同一の走路を走行するたびに実行されて学習値が更新され、数回の学習で完了する。
【0050】
なお、本実施形態の車両走行制御は、図3に示すようなスプーンコーナ状の走路に限らず、他の形状の走路、例えば、S字コーナでも実行可能である。図5は、S字コーナにおける走行軌跡の曲率分布の一例を示す図である。S字コーナにおいても、直線とみなす領域と、直線とみなす領域によって接続される二つの曲線領域とを有する走行軌跡に基づき、直線とみなす領域の手前側と奥側とを複数のコーナとみなすか、一つのコーナとみなすかを運転者の感覚に合致するように判断することができる。
【0051】
以上説明したように、本実施形態の車両走行制御システム1−1によれば、走行履歴(軌跡、曲率、通過速度等)に基づいて前方の走路を独立した複数のコーナとみなすか一つのコーナとみなすかが判定される。運転者の走行スタイルに応じて判定されたコーナの数や形状に基づく走行制御がなされるため、運転者の感覚に沿った車両の走行制御が可能となる。運転者の感覚と合わない(予期せぬ)位置やタイミングで制御が介入することが抑制されるため、運転者に違和感を与えることが抑制される。
【0052】
なお、前方の走路の曲率として、走路形状の曲率が用いられる場合についての制御内容は、走行軌跡の曲率データが用いられる場合と同様とすることができる。すなわち、ECU20は、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、前方の走路について学習済みであれば(ステップS1−Y)直線路とみなす区間を設定し(ステップS2)、車速を計測し(ステップS3)、運転者による走行履歴に基づき、曲線区間の一方から他方に向けて直線路とみなす区間を走行する場合の通過時間を予測する。
【0053】
通過時間が安定化時間よりも大であれば(ステップS5−Y)、直線路とみなす区間よりも手前側のコーナ(第一コーナC11)に対して第1減速制御を実行し(ステップS6,7)、次に奥側のコーナ(第二コーナC12)に対して第2減速制御を実行する(ステップS8,9)。つまり、二つの曲線区間を互いに独立したコーナとして、二つの曲線区間のそれぞれに対して目標車速を設定し、ブレーキ装置18を制御して車速制御を実行する。
【0054】
通過時間が安定化時間以下であれば(ステップS5−N)、複合コーナC1を一つのコーナとみなして減速制御を実行する(ステップS10,11)。つまり、二つの曲線区間および直線路とみなす区間を一つのコーナとして、一つのコーナの全体に対して一つの目標車速を設定し、ブレーキ装置18を制御して車速制御を実行する。また、前方の走路について学習済みでなければ(ステップS1−N)、コーナ通過時にコーナの通過速度等を学習して走行履歴を取得する(ステップS12)。これにより、前方の走路の曲率として、走路形状の曲率を用いた場合にも、運転者の走行スタイルに応じて前方の走路における互いに独立したコーナとみなせるコーナの数を判断して車速制御を実行することができる。
【0055】
本実施形態では、前方の走路に存在する複合コーナC1が、一つの直線路とみなす区間である直線路C13と、直線路C13によって接続される二つの曲線区間である第一コーナC11および第二コーナC12とを有するものである場合について説明したが、複合コーナC1が有する直線路とみなす区間の数、および曲線区間の数は、これには限定されない。複合コーナC1は、三つ以上の曲線区間を有し、連続する二つの曲線区間が直線路とみなす区間によってそれぞれ接続されているものであってもよい。
【0056】
本実施形態では、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを一つの単位区間として、この単位区間を一つのコーナとみなして走行状態の制御を行うか、二つの独立したコーナを有する区間として走行状態の制御を行うかが決定される。したがって、複合コーナC1が三つ以上の曲線区間を有するものであっても、その複合コーナC1に対して、直線路とみなす区間毎に単位区間を抽出し、それぞれの単位区間に対してその単位区間を一つのコーナとみなして走行状態の制御を行うか、二つの独立したコーナを有する区間として走行状態の制御を行うかを決定することができる。つまり、本実施形態の車両走行制御システム1−1では、複合コーナC1が有する直線路とみなす区間の数や曲線区間の数に関する制限はない。同様に、過去の軌跡における直線とみなす領域の数や、曲線領域の数に関する制限はない。
【0057】
(実施形態の変形例)
上記実施形態では、車両1の走行状態を変更する走行状態変更手段が、ブレーキ装置(制動力変更手段)18であったが、これには限定されず、自動変速機13、アクティブサスペンション31、加速度変更手段(エンジン11等)を走行状態変更手段として機能させてもよい。つまり、コーナにおける車両の走行制御として、減速制御に加えて、あるいはこれに代えて、例えば自動変速機13の変速制御、アクティブサスペンション31の制御、加速制御の少なくとも一つが実行されてもよい。自動変速機13の変速制御では、曲線区間を含む走路(曲線領域を含む軌跡)の走行に適した変速比への変速制御等がなされる。アクティブサスペンション31の制御では、曲線区間を含む走路(曲線領域を含む軌跡)の走行に適したサスペンション特性の制御がなされる。また、加速制御は、コーナ(曲線区間、曲線領域)からの脱出時等に実行される。走行状態変更手段が変更する走行状態として、車速のみならず、サスペンションやスタビライザから推定した車体姿勢やドライバビリティ、または燃費制御を用いてもよい。
【産業上の利用可能性】
【0058】
以上のように、本発明にかかる車両走行制御システムは、複数の曲線区間を有する走路の走行制御に有用であり、特に、運転者の感覚に沿う走行制御を実現するのに適している。
【符号の説明】
【0059】
1−1 車両走行制御システム
1 車両
11 エンジン
13 自動変速機
18 ブレーキ装置
19 ブレーキ油圧制御装置
20 ECU
C1 複合コーナ
C11 第一コーナ
C12 第二コーナ
C13 直線路
L2 走行軌跡(経路)
L21,L22 曲線領域
L23 直線とみなす領域
【技術分野】
【0001】
本発明は、車両走行制御システムに関する。
【背景技術】
【0002】
従来、コーナに応じた車両の走行制御を行う技術が提案されている。例えば、特許文献1には、前方にカーブがある場合に、最小曲率のカーブを検出し、このカーブへの適正進入速度である限界車速を求め、走行時における車速が限界車速以上となった場合に減速制御する運転支援装置の技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−19595号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、複数の曲線区間が連続する走路における車両の走行制御を運転者の感覚に沿ったものとすることについて、なお検討の余地がある。例えば、運転者の感覚に沿う走行制御が、運転者の技量やライン取りによって異なるものとなる場合がある。
【0005】
本発明の目的は、複数の曲線区間を有する走路において運転者の感覚に沿った車両の走行状態の制御を行うことができる車両走行制御システムを提供することである。
【課題を解決するための手段】
【0006】
本発明の車両走行制御システムは、車両の走行状態を変更する走行状態変更手段と、コーナに応じて前記走行状態変更手段を制御する制御装置とを備え、前記制御装置は、直線路とみなす区間と、前記直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、前記二つの曲線区間の一方から他方に向けて前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測される場合には前記二つの曲線区間を互いに独立した前記コーナとして前記走行状態変更手段を制御し、前記走行履歴に基づき、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測されない場合には前記二つの曲線区間および前記直線路とみなす区間を一つの前記コーナとして前記走行状態変更手段を制御することを特徴とする。
【0007】
上記車両走行制御システムにおいて、前記走行状態変更手段が変更する前記走行状態とは、前記車両の車速であり、前記制御装置は、前記コーナに応じた目標車速に基づく車速制御を行うものであって、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測される場合、前記二つの曲線区間のそれぞれに対して前記目標車速を設定して前記走行状態変更手段により車速制御を行い、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測されない場合、前記二つの曲線区間および前記直線路とみなす区間の全体に対して一つの前記目標車速を設定して前記走行状態変更手段により車速制御を行うことが好ましい。
【0008】
上記車両走行制御システムにおいて、前記直線路とみなす区間とは、曲率の大きさが予め定められた所定値以下の区間であることが好ましい。
【0009】
上記車両走行制御システムにおいて、前記走行状態変更手段として、制動力を変更する制動力変更手段、自動変速機、アクティブサスペンション、加速度を変更する加速度変更手段の少なくとも一つを備えることが好ましい。
【0010】
本発明の車両走行制御システムは、車両の走行状態を変更する走行状態変更手段と、コーナに応じて前記走行状態変更手段を制御する制御装置とを備え、前記制御装置は、前記運転者の走行履歴に基づき、前方の走路における前記車両の過去の軌跡が、直線とみなす領域と、前記直線とみなす領域によって接続される二つの曲線領域とを有する場合であって、前記二つの曲線領域の一方から他方に向けて前記直線とみなす領域を走行する間に前記車両の挙動が安定すると予測される場合には前記二つの曲線領域を互いに独立した前記コーナとして前記走行状態変更手段を制御し、前記直線とみなす領域を走行する間に前記車両の挙動が安定すると予測されない場合には前記二つの曲線領域および前記直線とみなす領域を一つの前記コーナとして前記走行状態変更手段を制御することを特徴とする。
【発明の効果】
【0011】
本発明にかかる車両走行制御システムは、運転者による走行履歴に基づき、二つの曲線区間の一方から他方に向けて直線路とみなす区間を走行する間に車両の挙動が安定すると予測される場合には二つの曲線区間を互いに独立したコーナとして走行状態変更手段を制御する。一方、走行履歴に基づき、直線路とみなす区間を走行する間に車両の挙動が安定すると予測されない場合には二つの曲線区間および直線路とみなす区間を一つのコーナとして走行状態変更手段を制御する。このように、本発明にかかる車両走行制御システムによれば、コーナの認識において走行履歴が反映されることで、運転者の感覚に沿った車両の走行状態の制御を行うことができるという効果を奏する。
【図面の簡単な説明】
【0012】
【図1】図1は、実施形態の車両走行制御システムの動作を示すフローチャートである。
【図2】図2は、実施形態の車両走行制御システムが適用された車両を示す図である。
【図3】図3は、複合コーナにおける複数の走行軌跡の一例を示す図である。
【図4】図4は、過去の走行軌跡の曲率分布の一例を示す図である。
【図5】図5は、S字コーナにおける走行軌跡の曲率分布の一例を示す図である。
【発明を実施するための形態】
【0013】
以下に、本発明にかかる車両走行制御システムの一実施形態につき図面を参照しつつ詳細に説明する。なお、この実施形態によりこの発明が限定されるものではない。また、下記の実施形態における構成要素には、当業者が容易に想定できるものあるいは実質的に同一のものが含まれる。
【0014】
(第1実施形態)
図1から図5を参照して、第1実施形態について説明する。本実施形態は、コーナに応じて走行状態変更手段を制御する制御装置を備える車両走行制御システムに関する。図1は、本発明にかかる車両走行制御システムの実施形態の動作を示すフローチャート、図2は、実施形態の車両走行制御システムが適用された車両を示す図である。
【0015】
本実施形態の車両走行制御システム1−1は、複雑なコーナで減速、コーナリング制御等の車両の走行制御を行う場合に、1つの複合コーナであるのか、2つ以上のコーナが連続しているのかを区別して走行制御を行う。具体的には、コーナ間の直線とみなせる区間が車両挙動が安定する距離よりも長い場合は、複数のコーナと認識してそれぞれのコーナに対する走行制御を実行し、上記区間が車両挙動が安定する距離以下である場合は、上記区間の前後のコーナを1つの複合コーナと認識して走行制御を実行する。コーナを複数と認識するか1つと認識するかは、走行履歴に基づいて判定される。これにより、運転者の走行スタイルに応じてコーナを認識することができ、運転者の感覚に沿った車両の走行制御が可能となる。
【0016】
図2に示すように、車両1には、エンジン11が設けられている。エンジン11には、トルクコンバータ12を有する自動変速機13が連結されている。エンジン11の駆動力は、トルクコンバータ12を介して自動変速機13に入力され、デファレンシャルギヤ14及びドライブシャフト15を介して駆動輪16に伝達される。自動変速機13は、A/T油圧制御装置17により車両の運転状態に応じて変速比が自動的に制御される。ブレーキ装置18は、ブレーキ油圧制御装置19によって制御されて、車両を制動する。本実施形態では、ブレーキ装置18が、制動力を変更する制動力変更手段であり、車両1の走行状態を変更する走行状態変更手段として機能する。ブレーキ装置18は、制動力により車両1の車速を変更することができる。
【0017】
車両1には、エンジン11や自動変速機13やブレーキ装置18などを制御する電子制御ユニット(ECU)20が設けられている。ECU20は、エンジン11、自動変速機13(A/T油圧制御装置17)及びブレーキ装置18(ブレーキ油圧制御装置19)の総合的な制御を行う。本実施形態では、ECU20が、コーナに応じて走行状態変更手段としてのブレーキ装置18を制御する制御装置として機能する。また、エンジン11は、ECU20によって制御されて出力トルクが調節されることで、車両の加速度(駆動力)を変更する加速度変更手段として機能することができる。
【0018】
車両1には、アクセルペダルの操作量(アクセル開度)を検出するアクセルポジションセンサ21が設けられている。アクセルポジションセンサ21により検出されたアクセル開度を示す信号は、ECU20に出力される。エンジン11の吸気管22に設けられたスロットルコントロールバルブ23は、スロットルアクチュエータ24により開閉可能とされている。ECU20は、アクセル開度にかかわらずスロットルアクチュエータ24によりスロットルコントロールバルブ23のスロットル開度を制御することができる。車両1には、スロットルコントロールバルブ23の全閉状態(アイドル状態)及びスロットル開度を検出する図示しないスロットル開度センサが設けられている。スロットル開度センサによって検出されたアイドル状態及びスロットル開度のそれぞれを示す信号は、ECU20に出力される。
【0019】
エンジン11には、エンジン回転数(エンジン回転速度)を検出するエンジン回転数センサ28が設けられている。車速センサ29は、車両の車速を検出する。シフトポジションセンサ30は、運転者が操作するシフトレバーの位置(シフトポジション)を検出する。ブレーキ操作量センサ32は、ブレーキ装置18の操作量を検出する。ステアリング舵角センサ33は、運転者により操作されるステアリングの舵角を検出する。各センサ28,29,30,32,33の検出結果を示す信号は、ECU20に出力される。
【0020】
ECU20は、変速マップを有しており、スロットル開度、車速などに基づいて、自動変速機13の変速段を決定し、この決定された変速段を成立させるようにA/T油圧制御装置17を制御することができる。
【0021】
横Gセンサ37は、車両の横Gを検出し、前後Gセンサ38は、車両の前後Gを検出する。横Gセンサ37により検出された横Gを示す信号および前後Gセンサ38により検出された前後Gを示す信号のそれぞれは、ECU20に出力される。
【0022】
ヨーレートセンサ40は、車両のヨーレートを検出する。ヨーレートセンサ40により検出されたヨーレートを示す信号は、ECU20に出力される。
【0023】
ナビゲーション装置50は、自車両を所定の目的地に誘導することを基本的な機能としており、ECU60と、操作部51と、表示部52と、スピーカ53と、位置検出部54と、地図データベース55と、運転履歴記録部56とを備えている。ナビゲーション装置50のECU60は、ECU20と双方向の通信が可能である。
【0024】
ECU60のCPU61は、入力された情報に基づいて、ナビゲーション処理等の各種演算処理を行う。ECU60のROM62には、目的地までの経路の検索、経路中の走行案内、特定区間の決定等を行うための各種プログラムが格納されている。RAM63は、読み書き可能なメモリである。
【0025】
位置検出部54は、GPSレシーバ、地磁気センサ、距離センサ、ビーコンセンサ、及びジャイロセンサを備えている。位置検出部54は、自車の位置を検出し、その検出した自車の位置を示すデータをECU60に出力する。
【0026】
地図データベース55には、車両の走行に必要な情報(地図、直線路、カーブ、登降坂、高速道路など)が記憶されている。地図データベース55は、地図データファイル、交差点データファイル、ノードデータファイル、道路データファイルを備えている。ECU60は、地図データベース55を参照して、必要な情報を読み出す。また、ECU20は、レーダ等によって先行車の有無を判断して本実施形態の制御のON/OFFを切替えることも可能である。
【0027】
車両1には、アクティブサスペンション31が設けられている。アクティブサスペンション31は、アクチュエータによりサスペンション特性を変化させることが可能なものであり、車両1のロール剛性を可変に制御することができる。なお、車両1は、アクティブサスペンションに代えて、ロール剛性を可変に制御できる他の装置(例えば、アクティブスタビライザ)を備えてもよい。アクティブサスペンション31は、ECU20に接続されており、ECU20によって制御される。本実施形態の車両走行制御システム1−1は、ECU20およびブレーキ油圧制御装置19を含む。
【0028】
ECU20は、コーナに応じた車両1の走行制御(コーナ制御)を実行することができる。本実施形態のECU20は、車両前方のコーナに対してブレーキ補助による減速制御を実行する。ECU20は、前方のコーナの曲率に基づき、コーナ走行時の目標車速を決定し、コーナに対して設定される制御目標位置(例えば、コーナ手前)において車速が目標車速となるようにブレーキ装置18を制御して車速制御を行うことで、運転者の制動操作を補助する。なお、本実施形態では、ECU20は、前方の走路における過去の走行軌跡に応じた目標車速に基づく車速制御を実行する。
【0029】
ここで、複数の曲線区間が連続する走路(複合コーナ)における走行制御を運転者の感覚に沿ったものとすることについて、従来十分な検討がなされていなかった。例えば、複数の曲線区間が連続するような複合コーナにおいて、1つの曲線区間に対してしかコーナ制御を行えない走行制御では、運転者の感覚と合わないことがある。また、複合コーナを認識してコーナ制御を行うものであっても、運転者の感覚に沿った制御とならない場合がある。これは、以下に図3を参照して説明するように、車速や運転者の技量(走行スタイル)等によって適切な制御目標値が変わってくることがあるためである。
【0030】
図3は、複合コーナにおける複数の走行軌跡の一例を示す図である。図3において、符号C1は、複合コーナを示す。複合コーナC1では、第一コーナ(曲線区間)C11と第二コーナ(曲線区間)C12とが短い直線路(直線路とみなす区間)C13によって接続されている。複合コーナC1において、破線L1で示す経路のように第一コーナC11、直線路C13および第二コーナC12に対して一つのコーナを走行するかのようにライン取りする運転者と、実線L2で示す経路のように第一コーナC11および第二コーナC12のそれぞれについて独立したコーナとしてライン取りする運転者がある。また、複合コーナC1を走行するときに車速によってもライン取りが異なることがある。このような複合コーナC1において、複数のコーナとして認識して走行制御すべきか、1つのコーナとして認識して走行制御すべきかの判断が適切でないと、運転者に違和感を与えることがある。
【0031】
さらに、実線L2に沿って車両1を走行させる運転者であっても、コーナにおける通過速度によって、第一コーナC11および第二コーナC12のそれぞれに対して減速制御を実行できるか否かが異なる場合がある。これは、直線路C13を走行する間に車両1の挙動が安定するか否かが直線路C13における通過速度によって変わるものであるためである。したがって、前方の二つのコーナC11,C12を互いに独立したコーナとみなして減速制御を実行することと、第一コーナC11,第二コーナC12および直線路C13を一つのコーナとみなして減速制御を実行することのいずれが適切であるかは、運転者の走行スタイルによって変わる。
【0032】
また、例えばS字状の複合コーナ等において、走路の形状としては曲線であっても、運転者が直線のライン取りをして走行する場合がある。この場合、走路の形状では直線路とみなす区間が存在しない場合であっても、走行軌跡では直線とみなす領域が存在し、その領域を走行する間に車両の挙動が安定することもある。したがって、こうした直線とみなす領域が存在する場合、その領域の手前側と奥側とで異なるコーナとして走行制御を行うことが可能である。
【0033】
本実施形態では、ECU20は、運転者の走行履歴に基づき、前方の走路を過去に走行したときの車両1の軌跡に応じて、減速制御の態様を決定する。具体的には、ECU20は、前方の走路における過去の走行軌跡の曲率データと、通過速度とに基づいて、前方の走路を一つのコーナとみなして減速制御を行うか、複数のコーナとみなしてそれぞれのコーナに対して減速制御を行うかを判断する。図4は、過去の走行軌跡の曲率分布の一例を示す図である。図4には、図3に示す複合コーナC1における走行軌跡の進行方向に沿った曲率の分布図が示されている。走行軌跡の曲率は、運転者によって、あるいは同一の運転者であっても通過速度等によって異なる分布となり得るものである。例えば、破線L1の経路に沿って車両1を走行させる運転者と、実線L2で示す経路に沿って車両1を走行させる運転者とでは、曲率の分布は異なるものとなる。図4に示す曲率の分布は、実線L2で示す経路(軌跡)に沿って車両1を走行させる運転者に関するものであり、複合コーナC1を走行するときに学習されたものである。
【0034】
ECU20は、走行軌跡において、曲率の大きさが予め定められた閾値(所定値)以下である領域を「直線とみなす領域」として設定する。具体的には、進行方向に対して一方側に湾曲する軌跡の曲率を正、他方側に湾曲する軌跡の曲率を負とした場合に、曲率の絶対値が閾値(R0)以下である領域が直線とみなす領域と判定される。また、走行軌跡において曲率の絶対値が閾値よりも大きな領域が曲線領域と判定される。図4において、符号A3は、直線とみなす領域に対応し、この直線とみなす領域は、図3において符号L23で示されている。また、符号A1,A2は、図3における符号L21,L22で示す曲線領域にそれぞれ対応している。ECU20は、このように、前方の走路における車両1の過去の軌跡L2が、直線とみなす領域L23と、直線とみなす領域L23によって接続される二つの曲線領域L21,L22とを有する場合、二つの曲線領域L21,L22の一方から他方に向けて直線とみなす領域L23の走路を走行する間に車両1の挙動が安定するか否かを予測する。その結果、挙動が安定すると予測される場合には二つの曲線領域L21,L22を互いに独立したコーナとしてブレーキ装置18を制御して減速制御を実行し、挙動が安定すると予測されない場合には二つの曲線領域L21,L22および直線とみなす領域L23を一つのコーナとしてブレーキ装置18を制御して減速制御を実行する。これにより、運転者の感覚に沿った車両の走行制御を行うことが可能となる。
【0035】
なお、前方の走路の曲率として、学習された走行軌跡の曲率データに代えて、前方の走路の形状の曲率が用いられてもよい。前方の走路の形状の曲率は、例えば、ナビゲーション装置50の地図データベース55に予め記憶された情報等から取得するようにすればよい。このように前方の走路の曲率として、走路の形状の曲率を用いる場合、上記「直線とみなす領域」は前方の走路における「直線路とみなす区間」と、上記「曲線領域」は前方の走路における「曲線区間」とすればよい。直線路とみなす区間の判定方法は、直線とみなす領域の判定方法と同様とすることができる。前方の走路の形状の曲率を用いる場合、少なくとも前方の走路の通過速度に関する走行履歴があれば、運転者の走行スタイルに応じてコーナを複数と認識するか一つと認識するかを判断することができる。また、前方の走路と類似の走路に関する通過速度の走行履歴を用いて前方の走路の通過速度を予測することも可能である。
【0036】
図1を参照して、本実施形態の車両の走行制御について説明する。図1に示す制御フローは、車両1の前方の走路に対して、その前方の走路における過去の走行軌跡が、直線とみなす領域と、直線とみなす領域によって接続される二つの曲線領域とを有すると認識した場合に実行される。直線とみなす領域は、曲率0の直線領域を含んでいてもよい。曲率の大きさの閾値である上記所定値は、例えば、走行時に車両1の挙動が安定する曲率の範囲に基づくものである。上記所定値は、例えば、挙動が安定したまま車両1が走行し続けることのできる曲率の大きさとして予め実験結果等に基づいて決められている。なお、車両1の挙動が安定しているとは、例えば、車両1のロールの大きさが所定ロール量以下であることである。この場合、曲率の大きさが上記所定値よりも小さな走路であれば、その走路を走行する際の横Gで生じる車両1のロールの大きさは、所定ロール量以下となる。
【0037】
ステップS1では、ECU20により、前方に認識した走路について既に学習済みであるか否かが判定される。前方の走路を実際に走行して曲率データおよび走路走行時の速度変化を学習したか否かが判定される。この学習結果は、ナビゲーション装置50の運転履歴記録部56に記憶されている。ステップS1の判定の結果、前方に認識した走路について学習済みであると判定された場合(ステップS1−Y)にはステップS2に進み、そうでない場合(ステップS1−N)にはステップS12に進む。
【0038】
ステップS2では、ECU20により、直線とみなす領域が設定される。ECU20は、運転履歴記録部56に記憶された、前方の走路に関する過去の走行軌跡の曲率データを取得する。この曲率データは、例えば、進行方向に沿った軌跡上の各点の曲率の値でもよく、軌跡を複数の区間に区切った場合の各区間の曲率の値であってもよい。ECU20は、曲率データに基づいて、進行方向に沿った走路の曲率の分布を予測する。ECU20は曲率の予測結果に基づいて、走行軌跡において、曲率の大きさが予め定められた閾値以下である領域を「直線とみなす領域」として設定する。
【0039】
次に、ステップS3では、ECU20により、車速が計測される。ECU20は、車速センサ29の検出結果を示す信号により前方の走路に進入する前の現在車速を計測する。
【0040】
次に、ステップS4では、ECU20により、直線とみなす領域の通過時間が予測される。ECU20は、運転履歴記録部56に記憶された、過去に同一の走路を走行したときの速度変化の学習結果を取得し、ステップS3で計測した走路進入前の現在車速に基づき、前方の走路を通過するときの通過速度(軌跡に沿った速度の推移)を予測する。なお、同一の走路における学習結果に代えて、他のコーナを通過したときのそのコーナの曲率と通過車速との関係に基づいて前方の走路の通過速度を予測するようにしてもよい。ECU20は、予測された前方の走路の通過速度と、ステップS2で設定された「直線とみなす領域」の長さとに基づき、下記式(1)により直線とみなす領域を通過するときの所要時間(通過時間)を予測する。
通過時間 = 直線とみなす領域の長さ ÷ 通過速度 (1)
【0041】
次に、ステップS5では、ECU20により、直線とみなす領域の通過時間が、車両挙動の安定化時間よりも大であるか否かが判定される。ECU20は、直線とみなす領域に入ってから、車両挙動が安定化するまでに要する時間(以下、単に「安定化時間」と記載する。)を求めるための情報を予め記憶している。安定化時間は、走路通過時の横G、車両質量、車両1の重心高、サスペンション特性等によって決まるものであり、予め実験等に基づき、各パラメータの組合せと安定化時間との関係が求められる。走路通過時の横Gは、ステップS4で予測された前方の走路の通過速度と、前方の走路に関する走行軌跡の曲率データとに基づいて算出することができる。
【0042】
ECU20は、各パラメータと安定化時間との関係を例えばマップとして記憶しており、そのマップを参照して、安定化時間を算出する。本実施形態では、「車両挙動が安定化する」とは、車両1のロールの大きさが所定ロール量以下となることである。なお、これに限らず、他の車両挙動に関する値に基づいて、安定化時間が決められてもよい。ステップS5の判定の結果、直線とみなす領域の通過時間が、車両挙動の安定化時間よりも大である(直線とみなす領域を走行する間に、車両挙動が安定する)と判定された場合(ステップS5−Y)には、ステップS6に進み、そうでない場合(ステップS5−N)にはステップS10に進む。
【0043】
ステップS6からステップS9では、ECU20は、前方の走路に関する走行軌跡における複数の曲線領域を「直線とみなす領域」を挟む互いに独立したコーナとして減速制御を実行する。図3に示すコーナを例に説明すると、ECU20は、曲線領域L21と曲線領域L22とを直線とみなす領域L23を挟んで互いに独立したコーナとみなし、直線とみなす領域L23よりも手前側の曲線領域L21および直線とみなす領域L23よりも奥側の曲線領域L22のそれぞれに対して目標車速(目標速度)を設定する。ECU20は、それぞれの目標車速に基づき、曲線領域L21に対するブレーキ装置18による車速制御(後述する第一減速制御)および曲線領域L22に対するブレーキ装置18による車速制御(後述する第二減速制御)を順に実行する。
【0044】
ステップS6では、ECU20により、第1減速制御の制御目標位置P1および目標速度V1が設定される。この制御目標位置P1および目標速度V1は、曲線領域L21に対する減速制御である第1減速制御の制御目標である。第1減速制御では、曲線領域L21に対して設定される制御目標位置P1における車速を目標速度V1とするように減速制御がなされる。制御目標位置P1および目標速度V1が設定されると、ステップS7に進み、第1減速制御が実行される。第1減速制御では、ECU20は、制御目標位置P1において目標速度V1を実現するように、ブレーキ油圧制御装置19を制御する。なお、減速制御の内容は、これには限定されず、自動変速機13の変速制御や、エンジン11のエンジンブレーキ力の制御による減速制御がなされてもよい。ステップS7が実行されると、ステップS8に進む。
【0045】
ステップS8では、ECU20により、第2減速制御の制御目標位置P2および目標速度V2が設定される。この第2減速制御の制御目標位置P2および目標速度V2は、曲線領域L22に対する減速制御である第2減速制御の制御目標である。
【0046】
次に、ステップS9では、ECU20により、第2減速制御が実行される。ECU20は、制御目標位置P2において目標速度V2を実現するように、ブレーキ油圧制御装置19を制御する。ステップS9が実行されると、本制御フローは終了する。
【0047】
ステップS5において否定判定がなされてステップS10に進むと、ステップS10ではECU20により、減速制御の制御目標位置P3および目標速度V3が設定される。ECU20は、二つの曲線領域L21,L22および直線とみなす領域L23を一つのコーナとみなし、この一つのコーナの全体に対して制御目標位置P3および目標速度V3を設定する。つまり、複合コーナC1に対して一つの制御目標位置P3および目標速度V3が設定される。目標速度V3は、例えば、曲線領域L21および曲線領域L22のうち曲率が大きい方の曲線領域に基づいて設定される。
【0048】
次に、ステップS11では、ECU20により、減速制御がなされる。ECU20は、ステップS10で設定された制御目標位置P3において目標速度V3を実現するように、ブレーキ油圧制御装置19による車速制御を実行する。ステップS11が実行されると、本制御フローは終了する。
【0049】
ステップS1において否定判定がなされてステップS12に進むと、ステップS12では、ECU20により走路通過時に軌跡、曲率および通過速度が学習される。ECU20は、GPSやINS(慣性航法システム)等で自車両位置を測位しながら車両1の走行位置の軌跡(座標値)および軌跡上の各点の曲率・通過速度を学習する。曲率は、例えば、車速センサ29、ステアリング舵角センサ33、横Gセンサ37、ヨーレートセンサ40等の検出結果に基づいて算出されてもよく、測位結果の軌跡の座標データに基づいて算出されてもよい。この軌跡、曲率および通過速度の学習は、同一の走路を走行するたびに実行されて学習値が更新され、数回の学習で完了する。
【0050】
なお、本実施形態の車両走行制御は、図3に示すようなスプーンコーナ状の走路に限らず、他の形状の走路、例えば、S字コーナでも実行可能である。図5は、S字コーナにおける走行軌跡の曲率分布の一例を示す図である。S字コーナにおいても、直線とみなす領域と、直線とみなす領域によって接続される二つの曲線領域とを有する走行軌跡に基づき、直線とみなす領域の手前側と奥側とを複数のコーナとみなすか、一つのコーナとみなすかを運転者の感覚に合致するように判断することができる。
【0051】
以上説明したように、本実施形態の車両走行制御システム1−1によれば、走行履歴(軌跡、曲率、通過速度等)に基づいて前方の走路を独立した複数のコーナとみなすか一つのコーナとみなすかが判定される。運転者の走行スタイルに応じて判定されたコーナの数や形状に基づく走行制御がなされるため、運転者の感覚に沿った車両の走行制御が可能となる。運転者の感覚と合わない(予期せぬ)位置やタイミングで制御が介入することが抑制されるため、運転者に違和感を与えることが抑制される。
【0052】
なお、前方の走路の曲率として、走路形状の曲率が用いられる場合についての制御内容は、走行軌跡の曲率データが用いられる場合と同様とすることができる。すなわち、ECU20は、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、前方の走路について学習済みであれば(ステップS1−Y)直線路とみなす区間を設定し(ステップS2)、車速を計測し(ステップS3)、運転者による走行履歴に基づき、曲線区間の一方から他方に向けて直線路とみなす区間を走行する場合の通過時間を予測する。
【0053】
通過時間が安定化時間よりも大であれば(ステップS5−Y)、直線路とみなす区間よりも手前側のコーナ(第一コーナC11)に対して第1減速制御を実行し(ステップS6,7)、次に奥側のコーナ(第二コーナC12)に対して第2減速制御を実行する(ステップS8,9)。つまり、二つの曲線区間を互いに独立したコーナとして、二つの曲線区間のそれぞれに対して目標車速を設定し、ブレーキ装置18を制御して車速制御を実行する。
【0054】
通過時間が安定化時間以下であれば(ステップS5−N)、複合コーナC1を一つのコーナとみなして減速制御を実行する(ステップS10,11)。つまり、二つの曲線区間および直線路とみなす区間を一つのコーナとして、一つのコーナの全体に対して一つの目標車速を設定し、ブレーキ装置18を制御して車速制御を実行する。また、前方の走路について学習済みでなければ(ステップS1−N)、コーナ通過時にコーナの通過速度等を学習して走行履歴を取得する(ステップS12)。これにより、前方の走路の曲率として、走路形状の曲率を用いた場合にも、運転者の走行スタイルに応じて前方の走路における互いに独立したコーナとみなせるコーナの数を判断して車速制御を実行することができる。
【0055】
本実施形態では、前方の走路に存在する複合コーナC1が、一つの直線路とみなす区間である直線路C13と、直線路C13によって接続される二つの曲線区間である第一コーナC11および第二コーナC12とを有するものである場合について説明したが、複合コーナC1が有する直線路とみなす区間の数、および曲線区間の数は、これには限定されない。複合コーナC1は、三つ以上の曲線区間を有し、連続する二つの曲線区間が直線路とみなす区間によってそれぞれ接続されているものであってもよい。
【0056】
本実施形態では、直線路とみなす区間と、直線路とみなす区間によって接続される二つの曲線区間とを一つの単位区間として、この単位区間を一つのコーナとみなして走行状態の制御を行うか、二つの独立したコーナを有する区間として走行状態の制御を行うかが決定される。したがって、複合コーナC1が三つ以上の曲線区間を有するものであっても、その複合コーナC1に対して、直線路とみなす区間毎に単位区間を抽出し、それぞれの単位区間に対してその単位区間を一つのコーナとみなして走行状態の制御を行うか、二つの独立したコーナを有する区間として走行状態の制御を行うかを決定することができる。つまり、本実施形態の車両走行制御システム1−1では、複合コーナC1が有する直線路とみなす区間の数や曲線区間の数に関する制限はない。同様に、過去の軌跡における直線とみなす領域の数や、曲線領域の数に関する制限はない。
【0057】
(実施形態の変形例)
上記実施形態では、車両1の走行状態を変更する走行状態変更手段が、ブレーキ装置(制動力変更手段)18であったが、これには限定されず、自動変速機13、アクティブサスペンション31、加速度変更手段(エンジン11等)を走行状態変更手段として機能させてもよい。つまり、コーナにおける車両の走行制御として、減速制御に加えて、あるいはこれに代えて、例えば自動変速機13の変速制御、アクティブサスペンション31の制御、加速制御の少なくとも一つが実行されてもよい。自動変速機13の変速制御では、曲線区間を含む走路(曲線領域を含む軌跡)の走行に適した変速比への変速制御等がなされる。アクティブサスペンション31の制御では、曲線区間を含む走路(曲線領域を含む軌跡)の走行に適したサスペンション特性の制御がなされる。また、加速制御は、コーナ(曲線区間、曲線領域)からの脱出時等に実行される。走行状態変更手段が変更する走行状態として、車速のみならず、サスペンションやスタビライザから推定した車体姿勢やドライバビリティ、または燃費制御を用いてもよい。
【産業上の利用可能性】
【0058】
以上のように、本発明にかかる車両走行制御システムは、複数の曲線区間を有する走路の走行制御に有用であり、特に、運転者の感覚に沿う走行制御を実現するのに適している。
【符号の説明】
【0059】
1−1 車両走行制御システム
1 車両
11 エンジン
13 自動変速機
18 ブレーキ装置
19 ブレーキ油圧制御装置
20 ECU
C1 複合コーナ
C11 第一コーナ
C12 第二コーナ
C13 直線路
L2 走行軌跡(経路)
L21,L22 曲線領域
L23 直線とみなす領域
【特許請求の範囲】
【請求項1】
車両の走行状態を変更する走行状態変更手段と、
コーナに応じて前記走行状態変更手段を制御する制御装置とを備え、
前記制御装置は、直線路とみなす区間と、前記直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、前記二つの曲線区間の一方から他方に向けて前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測される場合には前記二つの曲線区間を互いに独立した前記コーナとして前記走行状態変更手段を制御し、前記走行履歴に基づき、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測されない場合には前記二つの曲線区間および前記直線路とみなす区間を一つの前記コーナとして前記走行状態変更手段を制御する
ことを特徴とする車両走行制御システム。
【請求項2】
前記走行状態変更手段が変更する前記走行状態とは、前記車両の車速であり、
前記制御装置は、前記コーナに応じた目標車速に基づく車速制御を行うものであって、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測される場合、前記二つの曲線区間のそれぞれに対して前記目標車速を設定して前記走行状態変更手段により車速制御を行い、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測されない場合、前記二つの曲線区間および前記直線路とみなす区間の全体に対して一つの前記目標車速を設定して前記走行状態変更手段により車速制御を行う
請求項1に記載の車両走行制御システム。
【請求項3】
前記直線路とみなす区間とは、曲率の大きさが予め定められた所定値以下の区間である
請求項1または2に記載の車両走行制御システム。
【請求項4】
前記走行状態変更手段として、制動力を変更する制動力変更手段、自動変速機、アクティブサスペンション、加速度を変更する加速度変更手段の少なくとも一つを備える
請求項1から3のいずれか1項に記載の車両走行制御システム。
【請求項5】
車両の走行状態を変更する走行状態変更手段と、
コーナに応じて前記走行状態変更手段を制御する制御装置とを備え、
前記制御装置は、前記運転者の走行履歴に基づき、前方の走路における前記車両の過去の軌跡が、直線とみなす領域と、前記直線とみなす領域によって接続される二つの曲線領域とを有する場合であって、前記二つの曲線領域の一方から他方に向けて前記直線とみなす領域を走行する間に前記車両の挙動が安定すると予測される場合には前記二つの曲線領域を互いに独立した前記コーナとして前記走行状態変更手段を制御し、前記直線とみなす領域を走行する間に前記車両の挙動が安定すると予測されない場合には前記二つの曲線領域および前記直線とみなす領域を一つの前記コーナとして前記走行状態変更手段を制御する
ことを特徴とする車両走行制御システム。
【請求項1】
車両の走行状態を変更する走行状態変更手段と、
コーナに応じて前記走行状態変更手段を制御する制御装置とを備え、
前記制御装置は、直線路とみなす区間と、前記直線路とみなす区間によって接続される二つの曲線区間とを有する前方の走路に対して、運転者による走行履歴に基づき、前記二つの曲線区間の一方から他方に向けて前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測される場合には前記二つの曲線区間を互いに独立した前記コーナとして前記走行状態変更手段を制御し、前記走行履歴に基づき、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測されない場合には前記二つの曲線区間および前記直線路とみなす区間を一つの前記コーナとして前記走行状態変更手段を制御する
ことを特徴とする車両走行制御システム。
【請求項2】
前記走行状態変更手段が変更する前記走行状態とは、前記車両の車速であり、
前記制御装置は、前記コーナに応じた目標車速に基づく車速制御を行うものであって、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測される場合、前記二つの曲線区間のそれぞれに対して前記目標車速を設定して前記走行状態変更手段により車速制御を行い、前記直線路とみなす区間を走行する間に前記車両の挙動が安定すると予測されない場合、前記二つの曲線区間および前記直線路とみなす区間の全体に対して一つの前記目標車速を設定して前記走行状態変更手段により車速制御を行う
請求項1に記載の車両走行制御システム。
【請求項3】
前記直線路とみなす区間とは、曲率の大きさが予め定められた所定値以下の区間である
請求項1または2に記載の車両走行制御システム。
【請求項4】
前記走行状態変更手段として、制動力を変更する制動力変更手段、自動変速機、アクティブサスペンション、加速度を変更する加速度変更手段の少なくとも一つを備える
請求項1から3のいずれか1項に記載の車両走行制御システム。
【請求項5】
車両の走行状態を変更する走行状態変更手段と、
コーナに応じて前記走行状態変更手段を制御する制御装置とを備え、
前記制御装置は、前記運転者の走行履歴に基づき、前方の走路における前記車両の過去の軌跡が、直線とみなす領域と、前記直線とみなす領域によって接続される二つの曲線領域とを有する場合であって、前記二つの曲線領域の一方から他方に向けて前記直線とみなす領域を走行する間に前記車両の挙動が安定すると予測される場合には前記二つの曲線領域を互いに独立した前記コーナとして前記走行状態変更手段を制御し、前記直線とみなす領域を走行する間に前記車両の挙動が安定すると予測されない場合には前記二つの曲線領域および前記直線とみなす領域を一つの前記コーナとして前記走行状態変更手段を制御する
ことを特徴とする車両走行制御システム。
【図1】


【図2】
【図3】
【図4】
【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−207242(P2011−207242A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−73769(P2010−73769)
【出願日】平成22年3月26日(2010.3.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月26日(2010.3.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]