
車両走行制御装置
【課題】ハンチングや違和感を抑制できる車両走行制御装置を提供すること。
【解決手段】車両が有する複数の車輪の回転速度である車輪速度をそれぞれの前記車輪で独立して検出する車輪速度センサ3と、前記車輪に制動力を付与することができるブレーキ装置200と、前記車輪速度センサ3で検出した前記車輪速度が目標となる車輪速度になるように所定の制御周期で前記制動手段を制御して前記車輪に制動力を付与するブレーキ装置制御部83と、前記ブレーキ装置200を制御する際における前記制御周期を前記車輪速度の状態に応じて設定する制御周期設定部84と、を備える。
【解決手段】車両が有する複数の車輪の回転速度である車輪速度をそれぞれの前記車輪で独立して検出する車輪速度センサ3と、前記車輪に制動力を付与することができるブレーキ装置200と、前記車輪速度センサ3で検出した前記車輪速度が目標となる車輪速度になるように所定の制御周期で前記制動手段を制御して前記車輪に制動力を付与するブレーキ装置制御部83と、前記ブレーキ装置200を制御する際における前記制御周期を前記車輪速度の状態に応じて設定する制御周期設定部84と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両走行制御装置に関するものである。特に、この発明は、車両の走行状態に起因する不具合を解消することのできる車両走行制御装置に関するものである。
【背景技術】
【0002】
従来の車両には、走行時の安全性の向上などを目的とした車両走行制御装置として、駆動輪の空転を抑制するトラクションコントロール装置が設けられているものがある。このトラクションコントロール装置は、駆動輪が空転した際に、駆動輪の回転を低減する制御を行うことにより、空転を抑制している。例えば、特許文献1に記載の車両のトラクションコントロール装置では、駆動輪が空転した際には、ブレーキによって空転を抑えている。さらに、このトラクションコントロール装置では、駆動トルクが大きい場合には制御周期を短くしており、駆動トルクが小さい場合には制御周期を長くしている。これにより、駆動トルクが大きく、ブレーキ液圧が高い場合には、制御周期を短くすることにより、駆動トルクとブレーキ液圧とが相互干渉し難くなるため、サスペンションメンバのピッチングなどを抑制でき、乗り心地の悪化を抑制できる。また、駆動トルクが小さく、ブレーキ液圧が低い場合には、制御周期を長くすることにより、より確実にトラクション効果を得ることができる。
【0003】
【特許文献1】特開平3−186465号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、車輪の回転状態によっては、制御周期を短くするとハンチングが発生する虞がある。例えば、車両が停止状態から発進する際に、駆動輪のうちの1輪が空転した場合には、駆動力は空転している車輪に伝達されるため、他の駆動輪には駆動力が伝達されなくなり、車両は発進できなくなる。この場合、特許文献1に記載の車両のトラクションコントロール装置では、空転した車輪にブレーキをかけて、車輪の空転を止めようとする制御を行う。空転している車輪にブレーキをかけて、この車輪の回転速度が低下した場合、駆動力は他の駆動輪に伝達され始めるが、制御周期が短い場合には、空転している車輪の回転速度が十分に低下し、他の駆動輪に車両を走行させることができる程度の駆動力が伝達される前にブレーキが減圧される。このため、空転していた駆動輪は再び回転速度が速くなり、この空転を再びブレーキによって低下させる制御を行う。従って、車両は空転している駆動輪以外の駆動輪に短時間ごとに断続的に駆動力が伝達されたり伝達されなかったりするため、車両全体にハンチングが発生する。
【0005】
また、従来の車両走行制御装置では、トラクションコントロール装置と合わせて一定速度で車両を走行させる機能を持たせたものもある。このような車両走行制御装置では、車両を一定速度で走行させる場合には、トラクションコントロール装置での制御と同様に、車輪速度が目標となる車輪速度よりも早くなったら、ブレーキをかけることにより車輪速度を抑えている。しかし、車両を一定速度で走行させる場合において平坦な路面を走行する場合に、車輪速度の制御の制御周期が短い場合には、車輪速度を目標となる車輪速度にするために頻繁にブレーキをかけたり解除したりする。このため、速度変動が生じ易くなる。また、このように頻繁にブレーキをかけたり解除したりすることにより、ブレーキの油圧経路中に設けられたソレノイドの作動回数が増加するため、高周波の作動音が発生し易くなる。このため。これらにより車両の搭乗者に違和感を与える虞がある。
【0006】
本発明は、上記に鑑みてなされたものであって、ハンチングや違和感を抑制できる車両走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、この発明に係る車両走行制御装置は、車両が有する複数の車輪の回転速度である車輪速度をそれぞれの前記車輪で独立して検出する車輪速度検出手段と、前記車輪に制動力を付与することができる制動手段と、前記車輪速度検出手段で検出した前記車輪速度が目標となる車輪速度になるように所定の制御周期で前記制動手段を制御して前記車輪に制動力を付与する制動手段制御手段と、前記制動手段を制御する際における前記制御周期を前記車輪速度の状態に応じて設定する制御周期設定手段と、を備えることを特徴とする。
【0008】
この発明では、車輪に制動力を付与することができる制動手段を制御する際における制御周期を、制御周期設定手段で車輪速度の状態に応じて設定する。このため、複数の車輪の車輪速度の状態が、ハンチングを発生する虞のある状態の場合には、ハンチングを抑制できる制御周期にする。また、複数の車輪の車輪速度の状態が、制御周期を短く設定した場合には車両の搭乗者に違和感を与える虞のある状態の場合には、制御周期を長めに設定する。この結果、ハンチングや違和感を抑制することができる。
【0009】
また、この発明に係る車両走行制御装置は、前記制御周期設定手段は、前記車両が走行する路面の変動状態に基づいて前記制御周期を設定可能に設けられており、前記路面の変動が比較的小さい場合には変動が比較的大きい場合よりも前記制御周期を長くすることを特徴とする。
【0010】
この発明では、車両が走行する路面の変動が比較的小さい場合には変動が比較的大きい場合よりも制御周期を長くしている。つまり、車両が一定速度で走行をしている場合において路面の変動が小さい場合には、車輪速度が変化する要因が少ないため、このような場合に制動手段の制御周期を長くすることにより、頻繁に制動手段で制動力を付与したり制動力を解除したりした場合の不必要な速度変動を抑制できる。また、制動手段を作動させるためにソレノイドなどの作動部材が設けられていた場合、制動手段の制御周期を長くすることにより、頻繁に制動手段で制動力を付与したり制動力を解除したりした場合のように作動部材が頻繁に作動することを抑制できる。この結果、より確実に違和感を抑制することができる。
【0011】
また、この発明に係る車両走行制御装置は、前記制御周期設定手段は、前記車輪速度検出手段で検出した前記車輪速度より駆動輪が空転していると判定される場合は、駆動輪が空転していない場合よりも前記制御周期を長くすることを特徴とする。
【0012】
この発明では、駆動輪が空転していると判定される場合には、駆動輪が空転していないと判定される場合より制御周期を長くするが、空転していると判定される駆動輪は、接地していない虞がある。駆動輪が空転した場合には、この駆動輪が所定の車輪速度になるように制動力を付与するが、この場合、制御周期が短いと、車輪速度が収束したとしても、制動力を下げると再び空転してしまう虞がある。このため、この場合には制御周期を長くすることにより、空転している駆動輪の車輪速度を、より確実に収束させることができ、駆動力を他の駆動輪により確実に伝達することができる。この結果、より確実にハンチングを抑制することができる。
【0013】
また、この発明に係る車両走行制御装置は、前記制御周期設定手段は、前記車輪速度検出手段で検出した前記車輪速度より、前記複数の車輪間における前記車輪速度の差である車輪速差が所定の範囲内の場合は、前記車輪速差が所定の範囲外の場合よりも前記制御周期を長くすることを特徴とする。
【0014】
この発明では、車輪速差が所定の範囲内の場合は、制御周期を長くしているので、一定速度で走行している場合における不必要な速度変動をより確実に抑制できる。また、制御周期を長くすることにより、制動手段を作動させるためにソレノイドなどの作動部材が設けられていた場合でも、より確実に作動部材が頻繁に作動することによる作動音を抑制することができる。この結果、より確実に違和感を抑制することができる。
【0015】
また、この発明に係る車両走行制御装置は、前記制御周期設定手段は、前記車輪速差が所定の範囲内にある時間が所定時間以上の場合は、前記車輪速差が所定の範囲内にある時間が所定時間未満の場合よりも前記制御周期を長くすることを特徴とする。
【0016】
この発明では、車輪速差が所定の範囲内にある時間が所定時間以上の場合は、制御周期を長くしている。つまり、車輪速差が所定の範囲内にある時間が所定時間以上の場合は、路面の変動が小さく、一定速度で走行している確実性が高いため、この場合に制御周期を長くすることにより、より確実に一定速度で走行している場合における不必要な速度変動や、制動手段の作動部材が頻繁に作動することによる作動音を抑制することができる。この結果、より確実に違和感を抑制することができる。
【0017】
また、この発明に係る車両走行制御装置は、駆動輪に駆動力を付与する駆動手段を有しており、前記駆動輪の回転速度である車輪速度を目標となる前記車輪速度となるように前記駆動手段を制御する車両走行制御装置において、前記車輪速度は、前記駆動輪に制動力を付与することができる前記制動手段の前記制動力と前記駆動力とによって目標となる前記車輪速度になるように制御すると共に前記制動手段を制御する際における制御周期を前記車輪速度の状態に応じて設定することを特徴とする。
【0018】
この発明では、駆動輪の車輪速度は駆動手段の駆動力と制動手段の制動力とにより制御しており、制御手段の制御周期は、当該制動手段を制御する際における制御周期を車輪速度の状態に応じて設定している。このため、駆動輪の車輪速度の状態が、ハンチングを発生する虞のある状態の場合には、ハンチングを抑制できる制御周期にする。また、駆動輪の車輪速度の状態が、制御周期を短く設定した場合には駆動輪を備える車両の搭乗者に違和感を与える虞のある状態の場合には、制御周期を長めに設定する。この結果、ハンチングや違和感を抑制することができる。
【発明の効果】
【0019】
本発明に係る車両走行制御装置は、ハンチングや違和感を抑制することができる、という効果を奏する。
【発明を実施するための最良の形態】
【0020】
以下に、本発明に係る車両走行制御装置の実施例を図面に基づいて詳細に説明する。なお、この実施例によりこの発明が限定されるものではない。また、下記実施例における構成要素には、当業者が置換可能かつ容易なもの、或いは実質的に同一のものが含まれる。
【実施例】
【0021】
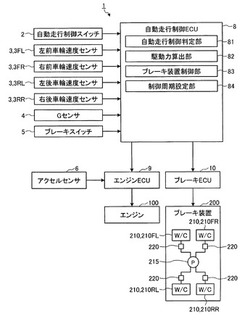
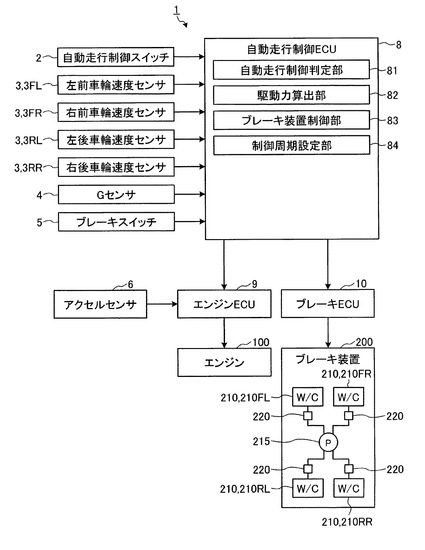
図1は、実施例に係る車両走行制御装置の構成例を示す図である。同図に示すように、車両走行制御装置1は、車両(図示省略)に搭載されるものであり、車両の車速が目標車速となるように自動走行制御を行うものである。この自動走行制御では、目標速度を一定の速度に維持することにより車速を一定の速度に維持し続ける制御である一定速度維持制御を行ったり、車両が有する複数の車輪(図示省略)の駆動力を適切な駆動力にする制御であるトラクションコントロール制御(以下、TRC制御)を行ったりする。車両走行制御装置1は、自動走行制御スイッチ2と、車輪速度センサ3と、Gセンサ4と、ブレーキスイッチ5と、アクセルセンサ6と、自動走行制御ECU8と、エンジンECU9と、ブレーキECU10とにより構成されている。
【0022】
なお、100は、車両の走行時の原動力を発生させる原動手段であり、エンジンECU9により目標制御量である目標駆動力に基づいて作動し、発生した原動力によって車両が有する車輪に駆動力を付与する駆動手段であるエンジンである。また、200は、走行中の車両を減速させる制動手段であり、ブレーキECU10により目標制動力に基づいて作動し、車両に制動力を作用させるブレーキ装置である。ここで、ブレーキ装置200は、運転者による制動操作、すなわち運転者によるブレーキペダル(図示省略)を踏み込みに基づいて制動力を発生するものでもある。
【0023】
自動走行制御スイッチ2は、制御開始トリガーである。自動走行制御スイッチ2は、車両の室内に設けられており、運転者によって操作されることでONとOFFとが切り替えられる。自動走行制御スイッチ2は、自動走行制御ECU8と接続されており、運転者によりONされるとON信号を自動走行制御ECU8に出力する。これにより、自動走行制御スイッチ2は、自動走行制御ECU8が自動走行制御を開始する制御開始トリガーとなる。
【0024】
車輪速度センサ3は、車両が有する複数の車輪の回転速度である車輪速度を、それぞれの車輪で独立して検出する車輪速度検出手段である。このように車輪速度センサ3は、複数の車輪の車輪速度を独立して検出可能になっているため、車輪速度センサ3は、車両の各車輪に設けられており、それぞれの車輪速度センサ3によって各車輪の車輪速度を検出する。
【0025】
例えば、複数の車輪として、2つの前輪と2つの後輪との4つの車輪により構成されている場合、車両の進行方向に向かって左側に位置する前輪を左前輪、右側に位置する前輪を右前輪、左側に位置する後輪を左後輪、右側に位置する後輪を右後輪とした場合に、車輪速度センサ3は、各車輪の近傍に設けられ、それぞれ独立して各車輪の車輪速度を検出可能になっている。このように設けられる車輪速度センサ3のうち、左前輪に設けられる車輪速度センサ3は左前車輪速度センサ3FLとなっており、右前輪に設けられる車輪速度センサ3は右前車輪速度センサ3FRとなっており、左後輪に設けられる車輪速度センサ3は左後車輪速度センサ3RLとなっており、右後輪に設けられる車輪速度センサ3は右後車輪速度センサ3RRとなっている。また、車輪速度センサ3は、自動走行制御ECU8と接続されており、検出した車輪速度を自動走行制御ECU8に出力する。
【0026】
Gセンサ4は、勾配検出手段である。Gセンサ4は、図示しない車両の傾きを検出するものである。つまり、Gセンサ4は、車両が現在走行している路面の勾配θを検出するものである。Gセンサ4は、自動走行制御ECU8と接続されており、検出された勾配θが自動走行制御ECU8に出力される。
【0027】
ブレーキスイッチ5は、制動操作検出手段である。ブレーキスイッチ5は、運転者による制動操作を検出するものである。ブレーキスイッチ5は、車両の室内に設けられているブレーキペダルが運転者により踏み込まれるとONになるように設けられている。このブレーキスイッチ5は、自動走行制御ECU8と接続されており、運転者によりブレーキペダルが踏み込まれると、ON信号を自動走行制御ECU8に出力する。これにより、運転者による制動操作が行われたか否かが自動走行制御ECU8に出力される。
【0028】
アクセルセンサ6は、加速操作量検出手段である。アクセルセンサ6は、運転者による加速操作量Sを検出する。アクセルセンサ6は、車両の室内に設けられているアクセルペダル(図示省略)が運転者により踏み込まれた踏み込み量を加速操作量Sとして検出するものである。アクセルセンサ6は、エンジンECU9と接続されており、運転者による加速操作量SをエンジンECU9に出力する。
【0029】
自動走行制御ECU8は、車速Vが予め設定された目標車速Voとなるように目標制御量である目標駆動力Foを算出し、エンジンECU9に出力するものである。また、自動走行制御ECU8は、車速Vが予め設定された目標車速Voとなるように目標制動力Boを算出し、ブレーキECU10に出力するものである。ここで、目標車速Voは、図示しない車両が低車速で走行することができる値であり、例えば10km/h程度である。
【0030】
自動走行制御ECU8は、エンジンECU9により目標駆動力Foに基づいてエンジン100を制御すると共に、ブレーキECU10により目標制動力Boに基づいてブレーキ装置200を制御するものである。つまり、自動走行制御ECU8は、エンジン100とブレーキ装置200とを協調制御するものである。自動走行制御ECU8は、自動走行制御判定部81と、駆動力算出部82と、ブレーキ装置制御部83と、制御周期設定部84とを有する。ここで、自動走行制御ECU8のハード構成は、既に公知であるので説明は省略する。
【0031】
自動走行制御判定部81は、運転者による自動走行制御の開始の意志を判定するものである。自動走行制御判定部81は、自動走行制御スイッチ2が運転者によって操作されることによりONされた場合に出力されるON信号が出力されたか否かにより、自動走行制御を開始するか否かを判定するものである。
【0032】
駆動力算出部82は、エンジン100に出力させる目標駆動力Foを算出するものである。駆動力算出部82では、車両の車速Vが予め設定されている目標車速Voとなるように、目標駆動力Foを算出する。
【0033】
ブレーキ装置制御部83は、車輪速度センサ3で検出した車輪速度VWが目標となる車輪速度である目標車輪速度VWoになるように所定の制御周期でブレーキ装置200を制御して車輪に制動力を付与する制動手段制御手段である。目標車輪速度VWoは、一定速度維持制御の場合においては、車両の車速Vが予め設定されている目標車速Voとなる車輪速度になっており、TRC制御の場合においては、空転している車輪が、空転が終了したと判定することができる車輪速度になっている。
【0034】
ブレーキ装置制御部83は、車輪速度VWが目標車輪速度VWoになるように、目標制動力Boを算出する。ブレーキ装置制御部83は、ブレーキスイッチ5がOFFでありON信号が出力されないと、車輪速度VWが目標車輪速度VWoとなるように算出された目標制動力BoをブレーキECU10に出力する。その際に、ブレーキ装置制御部83は、制御周期設定部84で設定する制御周期でブレーキ装置200を制御する。一方、ブレーキ装置制御部83は、ブレーキスイッチ5がONとされON信号が出力される、即ち、運転者による制動操作を検出すると、車輪速度VWが目標車輪速度VWoとなるように算出された目標制動力BoをブレーキECU10に出力しない。
【0035】
制御周期設定部84は、ブレーキ装置制御部83でブレーキ装置200を制御する際における制御周期を、車輪速度VWの状態に応じて設定する制御周期設定手段である。この制御周期設定部84は、車輪速度センサ3で検出した車輪速度VWより、駆動力が伝達されることにより駆動力が付与される車輪である駆動輪が空転していると判定される場合は、駆動輪が空転していない場合よりも制御周期を長くする。また、制御周期設定部84は、車輪速度センサ3で検出した車輪速度VWより、複数の車輪間における車輪速度の差である車輪速差が所定の範囲内の場合は、車輪速差が所定の範囲外の場合よりも制御周期を長くする。さらに、制御周期設定部84は、車輪速差が所定の範囲内にある時間が所定時間以上の場合は、車輪速差が所定の範囲内にある時間が所定時間未満の場合よりも制御周期を長くする。
【0036】
また、ブレーキ装置200は、複数のホイールシリンダ210を有しており、これらのホイールシリンダ210は、それぞれ車両が有する車輪の近傍に設けられている。このように設けられるホイールシリンダ210のうち、左前輪に設けられるホイールシリンダ210は左前ホイールシリンダ210FLとなっており、右前輪に設けられるホイールシリンダ210は右前ホイールシリンダ210FRとなっており、左後輪に設けられるホイールシリンダ210は左後ホイールシリンダ210RLとなっており、右後輪に設けられるホイールシリンダ210は右後ホイールシリンダ210RRとなっている。
【0037】
このブレーキ装置200は、ホイールシリンダ210に与える油圧を発生させる油圧発生源である油圧ポンプ215を有しており、油圧ポンプ215から各ホイールシリンダ210にかけた油圧経路には、それぞれ油圧ポンプ215で発生した油圧の伝達や遮断を切り替えるアクチュエータであるソレノイド220が設けられている。具体的には、ホイールシリンダ210を作動させる際におけるブレーキ制御モードは、このソレノイド220により3つのモードに切り替え可能になっており、ホイールシリンダ210への油圧を増加させるモードと、現在の油圧を保持するモードと、ホイールシリンダ210に作用させる油圧を減圧するモードとに切り替え可能になっている。このソレノイド220は、ホイールシリンダ210に対応して設けられているため複数設けられており、複数のソレノイド220は、それぞれ独立して制御可能になっている。
【0038】
これらの複数のホイールシリンダ210は、車輪に対してブレーキトルクを与えることにより制動力を与えることができるように形成されている。また、ホイールシリンダ210は、ソレノイド220を制御することにより、当該ホイールシリンダ210に与えられる油圧を調整することができ、これによりブレーキトルクを調整可能に設けられている。また、複数のホイールシリンダ210の油圧は、複数のソレノイド220が独立して制御可能になっていることにより、それぞれ独立して調整可能に設けられている。これにより、複数のホイールシリンダ210は、それぞれ独立して各車輪に制動力を与えることができるように設けられている。
【0039】
エンジンECU9は、目標駆動力Foに基づいてエンジン100を作動させるものである。エンジンECU9は、自動走行制御ECU8と接続されており、自動走行制御ECU8により算出され、出力された目標駆動力Foに基づいてエンジン100を作動させる。具体的には、吸気通路に設けられるスロットルバルブ(図示省略)の開度を調整したり、燃焼室(図示省略)で燃焼させる燃料の噴射量を調整したり、点火プラグ(図示省略)の点火時期を調整したりする。
【0040】
また、複数の車輪のうち駆動輪は、エンジン100の駆動力とブレーキ装置200の制動力とが付与されるため、当該駆動輪は、エンジン100の駆動力とブレーキ装置200の制動力とによって車輪速度VWが目標車輪速度VWoになるようになるようにエンジンECU9とブレーキ装置制御部83とにより制御されている。
【0041】
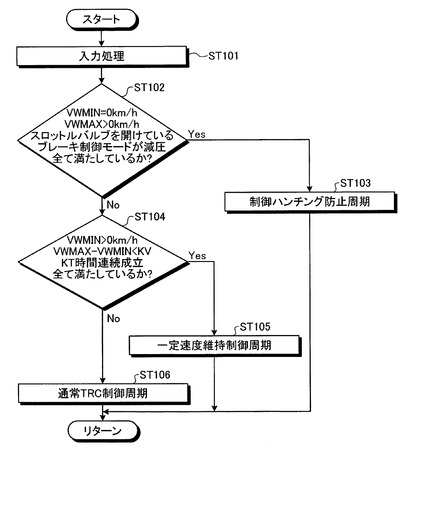
次に、実施例にかかる車両走行制御装置1を用いた車両走行制御方法について説明する。図2は、実施例に係る車両走行制御装置の自動走行制御ECUで行う動作フローを示す説明図である。なお、車両走行制御装置1による自動走行制御は、この車両走行制御装置1における所定の周期ごとに行われる。また、以下の説明では、自動走行制御スイッチ2がONの状態になり、自動走行制御を行っている場合について説明する。自動走行制御ECU8の動作について説明すると、まず、自動走行制御ECU8は、入力処理を行う(ステップST101)。ここでは、自動走行制御ECU8は、車輪速度センサ3により検出された車輪速度VW、Gセンサ4により検出された勾配θ、ブレーキスイッチ5のON/OFF状態などを取得する。
【0042】
次に、自動走行制御ECU8の自動走行制御判定部81は、VWMIN=0km/h、VWMAX>0km/h、スロットルバルブを開けている、ブレーキ制御モードが減圧であることが、全て満たされているか否かを判定する(ステップST102)。なお、ここでいうVWMINとは、車両に設けられる4つの車輪の車輪速度VWのうち、最も遅い車輪速度VWであり、VWMAXとは、4つの車輪の車輪速度VWのうち、最も速い車輪速度VWである。また、スロットルバルブを開けているか否かの判定は、アクセルペダルを運転者が操作することによってスロットルバルブを開けている状態、及び自動走行制御ECU8によって算出された目標駆動力Foに基づいてスロットルバルブを開けている状態のいずれの状態もスロットルバルブを開けていると判定する。また、ブレーキ制御モードが減圧とは、TRC制御や一定速度維持制御をする場合において、ホイールシリンダ210に作用させる油圧を減圧させるモードを指している。
【0043】
自動走行制御判定部81は、VWMINが0km/hで、VWMAXが0km/hより大きく、スロットルバルブを開けており、ブレーキ制御モードが減圧であるか否かを判定する。つまり、VWMINが0km/hがということは、車両は停止していることを示しており、VWMAXが0km/hより大きいということは、車両が停止した状態で、少なくとも1輪は空転していることを示している。また、スロットルバルブを開けているということは、運転者の意志により、または、自動走行制御ECU8による自動走行制御によって、車両を加速させようとしていることを示しており、ブレーキ制御モードが減圧ということは、車輪に制動力を付与する制御を行っていない状態を示している。自動走行制御判定部81は、これらの条件を満たしているか否かを判定する。
【0044】
自動走行制御判定部81での判定(ステップST102)により、VWMIN=0km/h、VWMAX>0km/h、スロットルバルブを開けている、ブレーキ制御モードが減圧であることが、全て満たされていると判定された場合には、制御周期を制御ハンチング防止周期にする(ステップST103)。この制御は、制御周期設定部84で行い、ブレーキ装置制御部83でブレーキ装置200を制御する際における制御周期を、制御ハンチング防止周期として、通常のTRC制御時における制御周期よりも長く設定する。
【0045】
これにより、ブレーキ装置制御部83は、通常のTRC制御時における制御周期よりも長く設定された制御周期でブレーキ装置200を制御することにより、VWMAX>0km/hであることにより空転していると判定される車輪に、通常のTRC制御時における制御周期よりも長く設定された制御周期で制動力を付与する。制御周期を制御ハンチング防止周期に設定したら、この処理手順から抜け出る。
【0046】
これに対し、自動走行制御判定部81での判定(ステップST102)により、VWMIN=0km/h、VWMAX>0km/h、スロットルバルブを開けている、ブレーキ制御モードが減圧であることのうち、1つでも満たされていないと判定された場合には、次に、自動走行制御判定部81は、VWMIN>0km/h、VWMAX−VWMIN<KV、KT時間連続成立していることが、全て満たされているか否かを判定する(ステップST104)。なお、ここでいうKVは、車両が整地走行をしているか否かを判定する基準となる所定の速度差を示している。また、KTは、車両が整地走行をしているか否かの判定する際における所定の監視時間となっている。
【0047】
自動走行制御判定部81は、VWMINが0km/hより大きく、VWMAXとVWMINとの差がKV未満の状態がKT時間連続成立しているか否かを判定する。つまり、VWMINが0km/hより大きいということは、車両は走行中であることを示しており、VWMAXとVWMINとの差がKV未満であるということは、車輪速差が小さく、車両は整地を走行中であることを示している。さらに、この状態がKT時間連続成立しているということは、整地を一定速度で走行していることを示している。自動走行制御判定部81は、これらの条件を満たしているか否かを判定する。
【0048】
自動走行制御判定部81での判定(ステップST104)により、VWMIN>0km/h、VWMAX−VWMIN<KV、KT時間連続成立していることが、全て満たされていると判定された場合には、制御周期を一定速度維持制御周期にする(ステップST105)。この制御は、制御周期設定部84で行い、ブレーキ装置制御部83でブレーキ装置200を制御する際における制御周期を、一定速度維持制御周期として、通常の一定速度維持制御時における制御周期よりも長く設定する。
【0049】
これにより、ブレーキ装置制御部83は、通常の一定速度維持制御時における制御周期よりも長く設定された制御周期でブレーキ装置200を制御することにより、VWMAX−VWMIN<KVであることにより、整地を走行していると判定される車両の車輪に、通常の一定速度維持制御時における制御周期よりも長く設定された制御周期で制動力を付与しながら車輪速度VWを制御する。制御周期を一定速度維持制御周期に設定したら、この処理手順から抜け出る。
【0050】
これに対し、自動走行制御判定部81での判定(ステップST104)により、VWMIN>0km/h、且つ、VWMAX−VWMIN<KVで、KT時間連続成立していることが満たされていないと判定された場合には、次に、自動走行制御判定部81は、制御周期を通常TRC制御周期にする(ステップST106)。この制御は、制御周期設定部84で行い、ブレーキ装置制御部83でブレーキ装置200を制御する際における制御周期を、通常のTRC制御時における制御周期に設定する。
【0051】
これにより、ブレーキ装置制御部83は、通常のTRC制御時における制御周期でブレーキ装置200を制御し、この制御周期で制動力を付与する。制御周期を通常TRC制御周期に設定したら、この処理手順から抜け出る。
【0052】
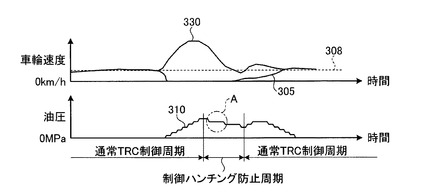
図3は、車両の発進時に一部の車輪にスリップが発生した場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。図4は、制御ハンチング防止周期でブレーキ装置を制御する際の説明図であり、図3のA部における制御信号の説明図である。以上の車両走行制御装置1は、車輪に制動力を付与することができるブレーキ装置200を制御する際における制御周期を、制御周期設定部84で車輪速度の状態に応じて設定しており、複数の車輪の車輪速度の状態が、ハンチングを発生する虞のある状態の場合には、ハンチングを抑制できる制御周期にしている。つまり、図3に示すように、車輪速度VWが全輪でほぼ一定の場合には、自動走行制御ECU8は通常TRC制御周期で自動走行制御を行い、ブレーキ装置制御部83で制御されるブレーキ装置200は、車輪に制動力を付与しないため、ホイールシリンダ210に作用させる油圧である制御周期調整時油圧310は0MPaになる。
【0053】
この状態で車両を走行させ、4つの車輪のうち1つの車輪が空転した場合には、空転中の車輪の車輪速度であり、且つ、制御周期設定部84で制御周期が調整可能なブレーキ装置200で制動力を付与できる車輪の車輪速度である制御周期調整時空転車輪速度300は、速度が上昇する。また、この場合、エンジンからの駆動力は空転している車輪にのみ伝達されるため、その他の車輪には駆動力は伝達されない。このため、4つの車輪のうち、空転している車輪以外の車輪速度である制御周期調整時非空転車輪速度305は、車輪速度が低下して0km/hになる。
【0054】
このように、一部の車輪は空転して制御周期調整時空転車輪速度300は上昇し、その他の車輪は停止して0km/hになった場合には、ブレーキ装置制御部83でブレーキ装置200を制御し、油圧ポンプ215を作動させることによりホイールシリンダ210に油圧を作用させる。このため、制御周期調整時油圧310は上昇する。これにより、空転している車輪には制動力が付与され、空転が抑制されるが、空転が低減して車輪速度が低下を始めたら、空転している車輪が完全に停止しないように、制御周期調整時油圧310を減圧する。
【0055】
このように、制御周期調整時油圧310を減圧する際には、ブレーキ装置200を制御する制御周期を長くして、制御ハンチング防止周期でブレーキ装置200を制御する。制御ハンチング防止周期でブレーキ装置200を制御する場合には、ブレーキ装置制御部83でブレーキ装置200を制御する際における制御周期を、通常のTRC制御時などにおける制御周期よりも長くする。
【0056】
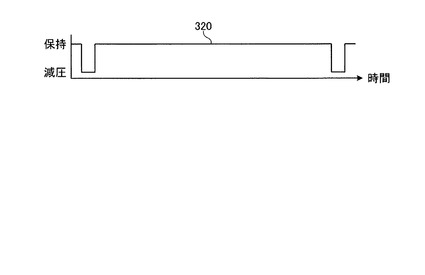
ここで、空転を抑えるために制動力を付与した車輪の制動力を低減する際には、制御周期調整時空転車輪速度300に基づいて徐々に低減させるため、この場合における制御信号は、ホイールシリンダ210に作用させる油圧が保持と減圧とを繰り返すように、制御信号も図4の制御周期調整時制御信号320で示すように、保持と減圧とを繰り返す制御信号を送信する。その際に、制御ハンチング防止周期でブレーキ装置200を制御する場合には、制御周期を通常のTRC制御時における制御周期よりも長くするため、例えば、減圧から保持になり、次の減圧までの期間を、通常のTRC制御時における同期間(図6参照)よりも長くする。
【0057】
このように、制御周期を長くすることにより、制御周期調整時油圧310は高い状態が維持されるので、空転している車輪には制動力が付与され続ける。このため、このように空転している車輪には制動力が付与され続けている間に駆動力は空転している車輪以外の車輪に伝達されるため、この車輪の車輪速度である制御周期調整時非空転車輪速度305は上昇する。これにより、制御周期調整時空転車輪速度300、及び制御周期調整時非空転車輪速度305は、共に目標車輪速度308に近付き、車両は走行することができる。
【0058】
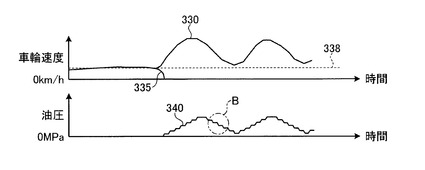
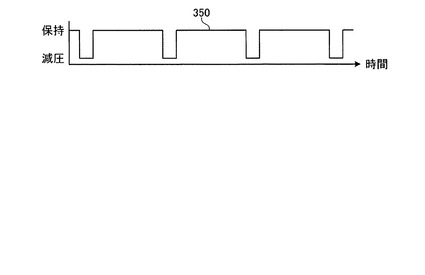
図5は、従来の車両走行制御装置において車両の発進時に一部の車輪にスリップが発生した場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。図6は、従来の車両走行制御装置においてブレーキ装置を制御する際の説明図であり、図5のB部における制御信号の説明図である。一方、従来の車両走行制御装置では、空転している車輪に制動力を付与し、空転している車輪の車輪速度である制御周期一定時空転車輪速度330が低下し始めた場合でも、ブレーキ装置200を制御する際における制御周期は一定であるため、図6の制御周期一定時制御信号350で示すように、短期間で保持と減圧とを繰り返す。このため、制御周期一定時油圧340は低下が早くなり、低下を始めた制御周期一定時空転車輪速度330は、再び上昇する。このため、駆動力は空転している車輪以外の車輪には伝達され難くなり、この車輪の車輪速度である制御周期一定時非空転車輪速度335は、0km/hのままとなる。従って、車両はハンチングが発生した状態になり、制御周期一定時空転車輪速度330と制御周期一定時非空転車輪速度335とは、共に目標車輪速度338には近付かなくなる。
【0059】
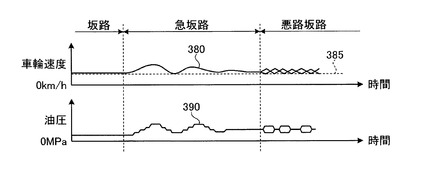
図7は、従来の車両走行制御装置において一定速度維持制御を行った場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。また、複数の車輪の車輪速度の状態が、制御周期を短く設定した場合には車両の搭乗者に違和感を与える虞のある状態の場合には、制御周期を長めに設定する。例えば、坂路を下っている状態で一定速度維持制御を行っている際に、坂路が下りの急坂路になった場合、制御周期が一定の場合における車輪速度である制御周期一定時車輪速度380は上昇するため、この場合におけるブレーキの油圧である制御周期一定時油圧390は、上昇した制御周期一定時車輪速度380を低下させるために、上昇させる。これにより、車輪には制動力が付与されるため、制御周期一定時車輪速度380は低下する。制御周期一定時車輪速度380が低下し、目標車輪速度385に近付いたら、制御周期一定時油圧390を低下させる。これにより、制御周期一定時車輪速度380は再び上昇する。また、悪路坂道では、制御周期一定時車輪速度380が目標車輪速度385に近付くように、制御周期一定時油圧390を変化させる。
【0060】
従来の車両走行制御装置で一定速度維持制御をしている際に、下りの急坂路を走行する際には、このように、制御周期一定時車輪速度は変化し続けるため、車速も変化し続ける。これにより、車両の搭乗者は違和感を覚える虞がある。
【0061】
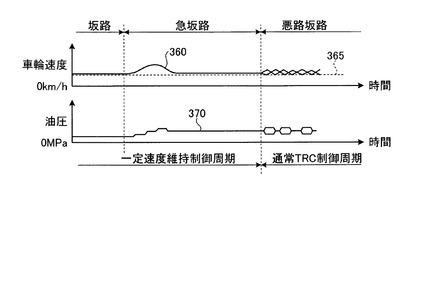
これに対し、実施例に係る車両走行制御装置1では、一定速度維持制御をしている場合には、ブレーキ装置200を制御する制御周期を、通常のTRC制御時における制御周期よりも長い一定速度維持制御周期で制御する。図8は、実施例に係る車両走行制御装置において一定速度維持制御を行った場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。これにより、車両が下りの急坂路を走行することにより、制御周期を調整する場合における車輪速度である制御周期調整時車輪速度360が上昇した場合でも、この場合における油圧である制御周期調整時油圧370が低下し難くなるため、車輪には制動力が付与され続ける。このため、制御周期調整時車輪速度360は、車両が下りの急坂路を走行した場合でも変化し難くなり、目標車輪速度365に近い状態を維持することができる。また、車両が悪路坂路を走行する場合には、制御周期を通常TRC制御周期にし、頻繁に変化する路面の状況に合わせて、制御周期調整時油圧を頻繁に変化させる。
【0062】
これらのように、一部の車輪が空転することにより他の車輪に駆動力が伝達されなくなった状態で、車輪速度VWを目標車輪速度に近付ける場合にハンチングを発生する虞のある状態の場合には、制御周期を長くして制御ハンチング防止周期にすることにより、ハンチングを抑制できる。また、一定速度維持制御をする際、制御周期を長くして一定速度維持制御周期にすることにより、車両の搭乗者は違和感を抑制できる。これらの結果、ハンチングや違和感を抑制することができる。
【0063】
また、制御周期設定部84は、このように、例えば悪路坂路を走行する場合には通常TRC制御周期にし、坂路や急坂道を走行する場合には一定速度維持制御周期にすることにより、制御周期を長くしている。つまり、制御周期設定部84は、車両が走行する路面の変動状態に基づいて前記制御周期を設定可能に設けられており、路面の変動が比較的小さい場合には変動が比較的大きい場合よりも制御周期を長くしている。車両が一定速度で走行をしている場合において路面の変動が小さい場合には、車輪速度VWが変化する要因が少ないため、このような場合にブレーキ装置200の制御周期を長くすることにより、頻繁にブレーキ装置200で制動力を付与したり制動力を解除したりした場合の不必要な速度変動を抑制できる。また、ブレーキ装置200を作動させるためにソレノイド220などの作動部材が設けられていた場合、ブレーキ装置200の制御周期を長くすることにより、頻繁にブレーキ装置200で制動力を付与したり制動力を解除したりした場合のようにソレノイド220が頻繁に作動することを抑制できる。この結果、より確実に違和感を抑制することができる。
【0064】
また、制御周期設定部84は、車輪速度センサ3で検出した車輪速度VWより駆動輪が空転していると判定される場合は、駆動輪が空転していない場合よりも制御周期を長くしている。つまり、車両の走行時において、空転していると判定される駆動輪は、接地していない虞がある。駆動輪が空転した場合には、この駆動輪が所定の車輪速度VWになるように制動力を付与するが、この場合、制御周期が短いと、車輪速度VWが収束したとしても、制動力を下げると再び空転してしまう虞がある。このため、この場合には制御周期を長くすることにより、空転している駆動輪の車輪速度VWを、より確実に収束させることができ、駆動力を他の駆動輪により確実に伝達することができる。この結果、より確実にハンチングを抑制することができる。
【0065】
制御周期設定部84は、車輪速度センサ3で検出した車輪速度VWより、複数の車輪間における車輪速度VWの差である車輪速差(VWMAX−VWMIN)が所定の範囲(図2、ステップST104、KV)内の場合は、車輪速差が所定の範囲外の場合よりも制御周期を長くしている。これにより、一定速度で走行している場合における不必要な速度変動をより確実に抑制できる。また、制御周期を長くすることにより、ブレーキ装置200を作動させるためにソレノイド220が設けられていた場合でも、より確実にソレノイド220が頻繁に作動することによる作動音を抑制することができる。この結果、より確実に違和感を抑制することができる。
【0066】
制御周期設定部84は、車輪速差が所定の範囲(KV)内にある時間が所定時間(図2、ステップST104、KT)以上の場合は、車輪速差が所定の範囲内にある時間が所定時間未満の場合よりも制御周期を長くしている。つまり、車輪速差が所定の範囲内にある時間が所定時間以上の場合は、路面の変動が小さく、一定速度で走行している確実性が高いため、この場合に制御周期を長くすることにより、より確実に一定速度で走行している場合における不必要な速度変動や、ブレーキ装置200のソレノイド220が頻繁に作動することによる作動音を抑制することができる。この結果、より確実に違和感を抑制することができる。
【0067】
また、駆動輪の車輪速度VWは、エンジン100の駆動力とブレーキ装置200の制動力とにより制御しており、ブレーキ装置200の制御周期は、当該ブレーキ装置200を制御する際における制御周期を車輪速度VWの状態に応じて設定している。このため、駆動輪の車輪速度VWの状態が、ハンチングを発生する虞のある状態の場合には、ハンチングを抑制できる制御周期にする。また、駆動輪の車輪速度VWの状態が、制御周期を短く設定した場合には駆動輪を備える車両の搭乗者に違和感を与える虞のある状態の場合には、制御周期を長めに設定する。この結果、ハンチングや違和感を抑制することができる。
【産業上の利用可能性】
【0068】
以上のように、本発明に係る車両走行制御装置は、車両の自動走行制御を行う車両走行制御装置に有用であり、特に、車輪に制動力を与えることにより速度調整を行う制御を含む車両走行制御装置に適している。
【図面の簡単な説明】
【0069】
【図1】実施例に係る車両走行制御装置の構成例を示す図である。
【図2】実施例に係る車両走行制御装置の自動走行制御ECUで行う動作フローを示す説明図である。
【図3】車両の発進時に一部の車輪にスリップが発生した場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。
【図4】制御ハンチング防止周期でブレーキ装置を制御する際の説明図であり、図3のA部における制御信号の説明図である。
【図5】従来の車両走行制御装置において車両の発進時に一部の車輪にスリップが発生した場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。
【図6】従来の車両走行制御装置においてブレーキ装置を制御する際の説明図であり、図5のB部における制御信号の説明図である。
【図7】従来の車両走行制御装置において一定速度維持制御を行った場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。
【図8】実施例に係る車両走行制御装置において一定速度維持制御を行った場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。
【符号の説明】
【0070】
1 車両走行制御装置
2 自動走行制御スイッチ
3 車輪速度センサ
4 Gセンサ
5 ブレーキスイッチ
6 アクセルセンサ
8 自動走行制御ECU
9 エンジンECU
10 ブレーキECU
81 自動走行制御判定部
82 駆動力算出部
83 ブレーキ装置制御部
84 制御周期設定部
100 エンジン
200 ブレーキ装置
210 ホイールシリンダ
215 油圧ポンプ
220 ソレノイド
【技術分野】
【0001】
本発明は、車両走行制御装置に関するものである。特に、この発明は、車両の走行状態に起因する不具合を解消することのできる車両走行制御装置に関するものである。
【背景技術】
【0002】
従来の車両には、走行時の安全性の向上などを目的とした車両走行制御装置として、駆動輪の空転を抑制するトラクションコントロール装置が設けられているものがある。このトラクションコントロール装置は、駆動輪が空転した際に、駆動輪の回転を低減する制御を行うことにより、空転を抑制している。例えば、特許文献1に記載の車両のトラクションコントロール装置では、駆動輪が空転した際には、ブレーキによって空転を抑えている。さらに、このトラクションコントロール装置では、駆動トルクが大きい場合には制御周期を短くしており、駆動トルクが小さい場合には制御周期を長くしている。これにより、駆動トルクが大きく、ブレーキ液圧が高い場合には、制御周期を短くすることにより、駆動トルクとブレーキ液圧とが相互干渉し難くなるため、サスペンションメンバのピッチングなどを抑制でき、乗り心地の悪化を抑制できる。また、駆動トルクが小さく、ブレーキ液圧が低い場合には、制御周期を長くすることにより、より確実にトラクション効果を得ることができる。
【0003】
【特許文献1】特開平3−186465号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、車輪の回転状態によっては、制御周期を短くするとハンチングが発生する虞がある。例えば、車両が停止状態から発進する際に、駆動輪のうちの1輪が空転した場合には、駆動力は空転している車輪に伝達されるため、他の駆動輪には駆動力が伝達されなくなり、車両は発進できなくなる。この場合、特許文献1に記載の車両のトラクションコントロール装置では、空転した車輪にブレーキをかけて、車輪の空転を止めようとする制御を行う。空転している車輪にブレーキをかけて、この車輪の回転速度が低下した場合、駆動力は他の駆動輪に伝達され始めるが、制御周期が短い場合には、空転している車輪の回転速度が十分に低下し、他の駆動輪に車両を走行させることができる程度の駆動力が伝達される前にブレーキが減圧される。このため、空転していた駆動輪は再び回転速度が速くなり、この空転を再びブレーキによって低下させる制御を行う。従って、車両は空転している駆動輪以外の駆動輪に短時間ごとに断続的に駆動力が伝達されたり伝達されなかったりするため、車両全体にハンチングが発生する。
【0005】
また、従来の車両走行制御装置では、トラクションコントロール装置と合わせて一定速度で車両を走行させる機能を持たせたものもある。このような車両走行制御装置では、車両を一定速度で走行させる場合には、トラクションコントロール装置での制御と同様に、車輪速度が目標となる車輪速度よりも早くなったら、ブレーキをかけることにより車輪速度を抑えている。しかし、車両を一定速度で走行させる場合において平坦な路面を走行する場合に、車輪速度の制御の制御周期が短い場合には、車輪速度を目標となる車輪速度にするために頻繁にブレーキをかけたり解除したりする。このため、速度変動が生じ易くなる。また、このように頻繁にブレーキをかけたり解除したりすることにより、ブレーキの油圧経路中に設けられたソレノイドの作動回数が増加するため、高周波の作動音が発生し易くなる。このため。これらにより車両の搭乗者に違和感を与える虞がある。
【0006】
本発明は、上記に鑑みてなされたものであって、ハンチングや違和感を抑制できる車両走行制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上述した課題を解決し、目的を達成するために、この発明に係る車両走行制御装置は、車両が有する複数の車輪の回転速度である車輪速度をそれぞれの前記車輪で独立して検出する車輪速度検出手段と、前記車輪に制動力を付与することができる制動手段と、前記車輪速度検出手段で検出した前記車輪速度が目標となる車輪速度になるように所定の制御周期で前記制動手段を制御して前記車輪に制動力を付与する制動手段制御手段と、前記制動手段を制御する際における前記制御周期を前記車輪速度の状態に応じて設定する制御周期設定手段と、を備えることを特徴とする。
【0008】
この発明では、車輪に制動力を付与することができる制動手段を制御する際における制御周期を、制御周期設定手段で車輪速度の状態に応じて設定する。このため、複数の車輪の車輪速度の状態が、ハンチングを発生する虞のある状態の場合には、ハンチングを抑制できる制御周期にする。また、複数の車輪の車輪速度の状態が、制御周期を短く設定した場合には車両の搭乗者に違和感を与える虞のある状態の場合には、制御周期を長めに設定する。この結果、ハンチングや違和感を抑制することができる。
【0009】
また、この発明に係る車両走行制御装置は、前記制御周期設定手段は、前記車両が走行する路面の変動状態に基づいて前記制御周期を設定可能に設けられており、前記路面の変動が比較的小さい場合には変動が比較的大きい場合よりも前記制御周期を長くすることを特徴とする。
【0010】
この発明では、車両が走行する路面の変動が比較的小さい場合には変動が比較的大きい場合よりも制御周期を長くしている。つまり、車両が一定速度で走行をしている場合において路面の変動が小さい場合には、車輪速度が変化する要因が少ないため、このような場合に制動手段の制御周期を長くすることにより、頻繁に制動手段で制動力を付与したり制動力を解除したりした場合の不必要な速度変動を抑制できる。また、制動手段を作動させるためにソレノイドなどの作動部材が設けられていた場合、制動手段の制御周期を長くすることにより、頻繁に制動手段で制動力を付与したり制動力を解除したりした場合のように作動部材が頻繁に作動することを抑制できる。この結果、より確実に違和感を抑制することができる。
【0011】
また、この発明に係る車両走行制御装置は、前記制御周期設定手段は、前記車輪速度検出手段で検出した前記車輪速度より駆動輪が空転していると判定される場合は、駆動輪が空転していない場合よりも前記制御周期を長くすることを特徴とする。
【0012】
この発明では、駆動輪が空転していると判定される場合には、駆動輪が空転していないと判定される場合より制御周期を長くするが、空転していると判定される駆動輪は、接地していない虞がある。駆動輪が空転した場合には、この駆動輪が所定の車輪速度になるように制動力を付与するが、この場合、制御周期が短いと、車輪速度が収束したとしても、制動力を下げると再び空転してしまう虞がある。このため、この場合には制御周期を長くすることにより、空転している駆動輪の車輪速度を、より確実に収束させることができ、駆動力を他の駆動輪により確実に伝達することができる。この結果、より確実にハンチングを抑制することができる。
【0013】
また、この発明に係る車両走行制御装置は、前記制御周期設定手段は、前記車輪速度検出手段で検出した前記車輪速度より、前記複数の車輪間における前記車輪速度の差である車輪速差が所定の範囲内の場合は、前記車輪速差が所定の範囲外の場合よりも前記制御周期を長くすることを特徴とする。
【0014】
この発明では、車輪速差が所定の範囲内の場合は、制御周期を長くしているので、一定速度で走行している場合における不必要な速度変動をより確実に抑制できる。また、制御周期を長くすることにより、制動手段を作動させるためにソレノイドなどの作動部材が設けられていた場合でも、より確実に作動部材が頻繁に作動することによる作動音を抑制することができる。この結果、より確実に違和感を抑制することができる。
【0015】
また、この発明に係る車両走行制御装置は、前記制御周期設定手段は、前記車輪速差が所定の範囲内にある時間が所定時間以上の場合は、前記車輪速差が所定の範囲内にある時間が所定時間未満の場合よりも前記制御周期を長くすることを特徴とする。
【0016】
この発明では、車輪速差が所定の範囲内にある時間が所定時間以上の場合は、制御周期を長くしている。つまり、車輪速差が所定の範囲内にある時間が所定時間以上の場合は、路面の変動が小さく、一定速度で走行している確実性が高いため、この場合に制御周期を長くすることにより、より確実に一定速度で走行している場合における不必要な速度変動や、制動手段の作動部材が頻繁に作動することによる作動音を抑制することができる。この結果、より確実に違和感を抑制することができる。
【0017】
また、この発明に係る車両走行制御装置は、駆動輪に駆動力を付与する駆動手段を有しており、前記駆動輪の回転速度である車輪速度を目標となる前記車輪速度となるように前記駆動手段を制御する車両走行制御装置において、前記車輪速度は、前記駆動輪に制動力を付与することができる前記制動手段の前記制動力と前記駆動力とによって目標となる前記車輪速度になるように制御すると共に前記制動手段を制御する際における制御周期を前記車輪速度の状態に応じて設定することを特徴とする。
【0018】
この発明では、駆動輪の車輪速度は駆動手段の駆動力と制動手段の制動力とにより制御しており、制御手段の制御周期は、当該制動手段を制御する際における制御周期を車輪速度の状態に応じて設定している。このため、駆動輪の車輪速度の状態が、ハンチングを発生する虞のある状態の場合には、ハンチングを抑制できる制御周期にする。また、駆動輪の車輪速度の状態が、制御周期を短く設定した場合には駆動輪を備える車両の搭乗者に違和感を与える虞のある状態の場合には、制御周期を長めに設定する。この結果、ハンチングや違和感を抑制することができる。
【発明の効果】
【0019】
本発明に係る車両走行制御装置は、ハンチングや違和感を抑制することができる、という効果を奏する。
【発明を実施するための最良の形態】
【0020】
以下に、本発明に係る車両走行制御装置の実施例を図面に基づいて詳細に説明する。なお、この実施例によりこの発明が限定されるものではない。また、下記実施例における構成要素には、当業者が置換可能かつ容易なもの、或いは実質的に同一のものが含まれる。
【実施例】
【0021】
図1は、実施例に係る車両走行制御装置の構成例を示す図である。同図に示すように、車両走行制御装置1は、車両(図示省略)に搭載されるものであり、車両の車速が目標車速となるように自動走行制御を行うものである。この自動走行制御では、目標速度を一定の速度に維持することにより車速を一定の速度に維持し続ける制御である一定速度維持制御を行ったり、車両が有する複数の車輪(図示省略)の駆動力を適切な駆動力にする制御であるトラクションコントロール制御(以下、TRC制御)を行ったりする。車両走行制御装置1は、自動走行制御スイッチ2と、車輪速度センサ3と、Gセンサ4と、ブレーキスイッチ5と、アクセルセンサ6と、自動走行制御ECU8と、エンジンECU9と、ブレーキECU10とにより構成されている。
【0022】
なお、100は、車両の走行時の原動力を発生させる原動手段であり、エンジンECU9により目標制御量である目標駆動力に基づいて作動し、発生した原動力によって車両が有する車輪に駆動力を付与する駆動手段であるエンジンである。また、200は、走行中の車両を減速させる制動手段であり、ブレーキECU10により目標制動力に基づいて作動し、車両に制動力を作用させるブレーキ装置である。ここで、ブレーキ装置200は、運転者による制動操作、すなわち運転者によるブレーキペダル(図示省略)を踏み込みに基づいて制動力を発生するものでもある。
【0023】
自動走行制御スイッチ2は、制御開始トリガーである。自動走行制御スイッチ2は、車両の室内に設けられており、運転者によって操作されることでONとOFFとが切り替えられる。自動走行制御スイッチ2は、自動走行制御ECU8と接続されており、運転者によりONされるとON信号を自動走行制御ECU8に出力する。これにより、自動走行制御スイッチ2は、自動走行制御ECU8が自動走行制御を開始する制御開始トリガーとなる。
【0024】
車輪速度センサ3は、車両が有する複数の車輪の回転速度である車輪速度を、それぞれの車輪で独立して検出する車輪速度検出手段である。このように車輪速度センサ3は、複数の車輪の車輪速度を独立して検出可能になっているため、車輪速度センサ3は、車両の各車輪に設けられており、それぞれの車輪速度センサ3によって各車輪の車輪速度を検出する。
【0025】
例えば、複数の車輪として、2つの前輪と2つの後輪との4つの車輪により構成されている場合、車両の進行方向に向かって左側に位置する前輪を左前輪、右側に位置する前輪を右前輪、左側に位置する後輪を左後輪、右側に位置する後輪を右後輪とした場合に、車輪速度センサ3は、各車輪の近傍に設けられ、それぞれ独立して各車輪の車輪速度を検出可能になっている。このように設けられる車輪速度センサ3のうち、左前輪に設けられる車輪速度センサ3は左前車輪速度センサ3FLとなっており、右前輪に設けられる車輪速度センサ3は右前車輪速度センサ3FRとなっており、左後輪に設けられる車輪速度センサ3は左後車輪速度センサ3RLとなっており、右後輪に設けられる車輪速度センサ3は右後車輪速度センサ3RRとなっている。また、車輪速度センサ3は、自動走行制御ECU8と接続されており、検出した車輪速度を自動走行制御ECU8に出力する。
【0026】
Gセンサ4は、勾配検出手段である。Gセンサ4は、図示しない車両の傾きを検出するものである。つまり、Gセンサ4は、車両が現在走行している路面の勾配θを検出するものである。Gセンサ4は、自動走行制御ECU8と接続されており、検出された勾配θが自動走行制御ECU8に出力される。
【0027】
ブレーキスイッチ5は、制動操作検出手段である。ブレーキスイッチ5は、運転者による制動操作を検出するものである。ブレーキスイッチ5は、車両の室内に設けられているブレーキペダルが運転者により踏み込まれるとONになるように設けられている。このブレーキスイッチ5は、自動走行制御ECU8と接続されており、運転者によりブレーキペダルが踏み込まれると、ON信号を自動走行制御ECU8に出力する。これにより、運転者による制動操作が行われたか否かが自動走行制御ECU8に出力される。
【0028】
アクセルセンサ6は、加速操作量検出手段である。アクセルセンサ6は、運転者による加速操作量Sを検出する。アクセルセンサ6は、車両の室内に設けられているアクセルペダル(図示省略)が運転者により踏み込まれた踏み込み量を加速操作量Sとして検出するものである。アクセルセンサ6は、エンジンECU9と接続されており、運転者による加速操作量SをエンジンECU9に出力する。
【0029】
自動走行制御ECU8は、車速Vが予め設定された目標車速Voとなるように目標制御量である目標駆動力Foを算出し、エンジンECU9に出力するものである。また、自動走行制御ECU8は、車速Vが予め設定された目標車速Voとなるように目標制動力Boを算出し、ブレーキECU10に出力するものである。ここで、目標車速Voは、図示しない車両が低車速で走行することができる値であり、例えば10km/h程度である。
【0030】
自動走行制御ECU8は、エンジンECU9により目標駆動力Foに基づいてエンジン100を制御すると共に、ブレーキECU10により目標制動力Boに基づいてブレーキ装置200を制御するものである。つまり、自動走行制御ECU8は、エンジン100とブレーキ装置200とを協調制御するものである。自動走行制御ECU8は、自動走行制御判定部81と、駆動力算出部82と、ブレーキ装置制御部83と、制御周期設定部84とを有する。ここで、自動走行制御ECU8のハード構成は、既に公知であるので説明は省略する。
【0031】
自動走行制御判定部81は、運転者による自動走行制御の開始の意志を判定するものである。自動走行制御判定部81は、自動走行制御スイッチ2が運転者によって操作されることによりONされた場合に出力されるON信号が出力されたか否かにより、自動走行制御を開始するか否かを判定するものである。
【0032】
駆動力算出部82は、エンジン100に出力させる目標駆動力Foを算出するものである。駆動力算出部82では、車両の車速Vが予め設定されている目標車速Voとなるように、目標駆動力Foを算出する。
【0033】
ブレーキ装置制御部83は、車輪速度センサ3で検出した車輪速度VWが目標となる車輪速度である目標車輪速度VWoになるように所定の制御周期でブレーキ装置200を制御して車輪に制動力を付与する制動手段制御手段である。目標車輪速度VWoは、一定速度維持制御の場合においては、車両の車速Vが予め設定されている目標車速Voとなる車輪速度になっており、TRC制御の場合においては、空転している車輪が、空転が終了したと判定することができる車輪速度になっている。
【0034】
ブレーキ装置制御部83は、車輪速度VWが目標車輪速度VWoになるように、目標制動力Boを算出する。ブレーキ装置制御部83は、ブレーキスイッチ5がOFFでありON信号が出力されないと、車輪速度VWが目標車輪速度VWoとなるように算出された目標制動力BoをブレーキECU10に出力する。その際に、ブレーキ装置制御部83は、制御周期設定部84で設定する制御周期でブレーキ装置200を制御する。一方、ブレーキ装置制御部83は、ブレーキスイッチ5がONとされON信号が出力される、即ち、運転者による制動操作を検出すると、車輪速度VWが目標車輪速度VWoとなるように算出された目標制動力BoをブレーキECU10に出力しない。
【0035】
制御周期設定部84は、ブレーキ装置制御部83でブレーキ装置200を制御する際における制御周期を、車輪速度VWの状態に応じて設定する制御周期設定手段である。この制御周期設定部84は、車輪速度センサ3で検出した車輪速度VWより、駆動力が伝達されることにより駆動力が付与される車輪である駆動輪が空転していると判定される場合は、駆動輪が空転していない場合よりも制御周期を長くする。また、制御周期設定部84は、車輪速度センサ3で検出した車輪速度VWより、複数の車輪間における車輪速度の差である車輪速差が所定の範囲内の場合は、車輪速差が所定の範囲外の場合よりも制御周期を長くする。さらに、制御周期設定部84は、車輪速差が所定の範囲内にある時間が所定時間以上の場合は、車輪速差が所定の範囲内にある時間が所定時間未満の場合よりも制御周期を長くする。
【0036】
また、ブレーキ装置200は、複数のホイールシリンダ210を有しており、これらのホイールシリンダ210は、それぞれ車両が有する車輪の近傍に設けられている。このように設けられるホイールシリンダ210のうち、左前輪に設けられるホイールシリンダ210は左前ホイールシリンダ210FLとなっており、右前輪に設けられるホイールシリンダ210は右前ホイールシリンダ210FRとなっており、左後輪に設けられるホイールシリンダ210は左後ホイールシリンダ210RLとなっており、右後輪に設けられるホイールシリンダ210は右後ホイールシリンダ210RRとなっている。
【0037】
このブレーキ装置200は、ホイールシリンダ210に与える油圧を発生させる油圧発生源である油圧ポンプ215を有しており、油圧ポンプ215から各ホイールシリンダ210にかけた油圧経路には、それぞれ油圧ポンプ215で発生した油圧の伝達や遮断を切り替えるアクチュエータであるソレノイド220が設けられている。具体的には、ホイールシリンダ210を作動させる際におけるブレーキ制御モードは、このソレノイド220により3つのモードに切り替え可能になっており、ホイールシリンダ210への油圧を増加させるモードと、現在の油圧を保持するモードと、ホイールシリンダ210に作用させる油圧を減圧するモードとに切り替え可能になっている。このソレノイド220は、ホイールシリンダ210に対応して設けられているため複数設けられており、複数のソレノイド220は、それぞれ独立して制御可能になっている。
【0038】
これらの複数のホイールシリンダ210は、車輪に対してブレーキトルクを与えることにより制動力を与えることができるように形成されている。また、ホイールシリンダ210は、ソレノイド220を制御することにより、当該ホイールシリンダ210に与えられる油圧を調整することができ、これによりブレーキトルクを調整可能に設けられている。また、複数のホイールシリンダ210の油圧は、複数のソレノイド220が独立して制御可能になっていることにより、それぞれ独立して調整可能に設けられている。これにより、複数のホイールシリンダ210は、それぞれ独立して各車輪に制動力を与えることができるように設けられている。
【0039】
エンジンECU9は、目標駆動力Foに基づいてエンジン100を作動させるものである。エンジンECU9は、自動走行制御ECU8と接続されており、自動走行制御ECU8により算出され、出力された目標駆動力Foに基づいてエンジン100を作動させる。具体的には、吸気通路に設けられるスロットルバルブ(図示省略)の開度を調整したり、燃焼室(図示省略)で燃焼させる燃料の噴射量を調整したり、点火プラグ(図示省略)の点火時期を調整したりする。
【0040】
また、複数の車輪のうち駆動輪は、エンジン100の駆動力とブレーキ装置200の制動力とが付与されるため、当該駆動輪は、エンジン100の駆動力とブレーキ装置200の制動力とによって車輪速度VWが目標車輪速度VWoになるようになるようにエンジンECU9とブレーキ装置制御部83とにより制御されている。
【0041】
次に、実施例にかかる車両走行制御装置1を用いた車両走行制御方法について説明する。図2は、実施例に係る車両走行制御装置の自動走行制御ECUで行う動作フローを示す説明図である。なお、車両走行制御装置1による自動走行制御は、この車両走行制御装置1における所定の周期ごとに行われる。また、以下の説明では、自動走行制御スイッチ2がONの状態になり、自動走行制御を行っている場合について説明する。自動走行制御ECU8の動作について説明すると、まず、自動走行制御ECU8は、入力処理を行う(ステップST101)。ここでは、自動走行制御ECU8は、車輪速度センサ3により検出された車輪速度VW、Gセンサ4により検出された勾配θ、ブレーキスイッチ5のON/OFF状態などを取得する。
【0042】
次に、自動走行制御ECU8の自動走行制御判定部81は、VWMIN=0km/h、VWMAX>0km/h、スロットルバルブを開けている、ブレーキ制御モードが減圧であることが、全て満たされているか否かを判定する(ステップST102)。なお、ここでいうVWMINとは、車両に設けられる4つの車輪の車輪速度VWのうち、最も遅い車輪速度VWであり、VWMAXとは、4つの車輪の車輪速度VWのうち、最も速い車輪速度VWである。また、スロットルバルブを開けているか否かの判定は、アクセルペダルを運転者が操作することによってスロットルバルブを開けている状態、及び自動走行制御ECU8によって算出された目標駆動力Foに基づいてスロットルバルブを開けている状態のいずれの状態もスロットルバルブを開けていると判定する。また、ブレーキ制御モードが減圧とは、TRC制御や一定速度維持制御をする場合において、ホイールシリンダ210に作用させる油圧を減圧させるモードを指している。
【0043】
自動走行制御判定部81は、VWMINが0km/hで、VWMAXが0km/hより大きく、スロットルバルブを開けており、ブレーキ制御モードが減圧であるか否かを判定する。つまり、VWMINが0km/hがということは、車両は停止していることを示しており、VWMAXが0km/hより大きいということは、車両が停止した状態で、少なくとも1輪は空転していることを示している。また、スロットルバルブを開けているということは、運転者の意志により、または、自動走行制御ECU8による自動走行制御によって、車両を加速させようとしていることを示しており、ブレーキ制御モードが減圧ということは、車輪に制動力を付与する制御を行っていない状態を示している。自動走行制御判定部81は、これらの条件を満たしているか否かを判定する。
【0044】
自動走行制御判定部81での判定(ステップST102)により、VWMIN=0km/h、VWMAX>0km/h、スロットルバルブを開けている、ブレーキ制御モードが減圧であることが、全て満たされていると判定された場合には、制御周期を制御ハンチング防止周期にする(ステップST103)。この制御は、制御周期設定部84で行い、ブレーキ装置制御部83でブレーキ装置200を制御する際における制御周期を、制御ハンチング防止周期として、通常のTRC制御時における制御周期よりも長く設定する。
【0045】
これにより、ブレーキ装置制御部83は、通常のTRC制御時における制御周期よりも長く設定された制御周期でブレーキ装置200を制御することにより、VWMAX>0km/hであることにより空転していると判定される車輪に、通常のTRC制御時における制御周期よりも長く設定された制御周期で制動力を付与する。制御周期を制御ハンチング防止周期に設定したら、この処理手順から抜け出る。
【0046】
これに対し、自動走行制御判定部81での判定(ステップST102)により、VWMIN=0km/h、VWMAX>0km/h、スロットルバルブを開けている、ブレーキ制御モードが減圧であることのうち、1つでも満たされていないと判定された場合には、次に、自動走行制御判定部81は、VWMIN>0km/h、VWMAX−VWMIN<KV、KT時間連続成立していることが、全て満たされているか否かを判定する(ステップST104)。なお、ここでいうKVは、車両が整地走行をしているか否かを判定する基準となる所定の速度差を示している。また、KTは、車両が整地走行をしているか否かの判定する際における所定の監視時間となっている。
【0047】
自動走行制御判定部81は、VWMINが0km/hより大きく、VWMAXとVWMINとの差がKV未満の状態がKT時間連続成立しているか否かを判定する。つまり、VWMINが0km/hより大きいということは、車両は走行中であることを示しており、VWMAXとVWMINとの差がKV未満であるということは、車輪速差が小さく、車両は整地を走行中であることを示している。さらに、この状態がKT時間連続成立しているということは、整地を一定速度で走行していることを示している。自動走行制御判定部81は、これらの条件を満たしているか否かを判定する。
【0048】
自動走行制御判定部81での判定(ステップST104)により、VWMIN>0km/h、VWMAX−VWMIN<KV、KT時間連続成立していることが、全て満たされていると判定された場合には、制御周期を一定速度維持制御周期にする(ステップST105)。この制御は、制御周期設定部84で行い、ブレーキ装置制御部83でブレーキ装置200を制御する際における制御周期を、一定速度維持制御周期として、通常の一定速度維持制御時における制御周期よりも長く設定する。
【0049】
これにより、ブレーキ装置制御部83は、通常の一定速度維持制御時における制御周期よりも長く設定された制御周期でブレーキ装置200を制御することにより、VWMAX−VWMIN<KVであることにより、整地を走行していると判定される車両の車輪に、通常の一定速度維持制御時における制御周期よりも長く設定された制御周期で制動力を付与しながら車輪速度VWを制御する。制御周期を一定速度維持制御周期に設定したら、この処理手順から抜け出る。
【0050】
これに対し、自動走行制御判定部81での判定(ステップST104)により、VWMIN>0km/h、且つ、VWMAX−VWMIN<KVで、KT時間連続成立していることが満たされていないと判定された場合には、次に、自動走行制御判定部81は、制御周期を通常TRC制御周期にする(ステップST106)。この制御は、制御周期設定部84で行い、ブレーキ装置制御部83でブレーキ装置200を制御する際における制御周期を、通常のTRC制御時における制御周期に設定する。
【0051】
これにより、ブレーキ装置制御部83は、通常のTRC制御時における制御周期でブレーキ装置200を制御し、この制御周期で制動力を付与する。制御周期を通常TRC制御周期に設定したら、この処理手順から抜け出る。
【0052】
図3は、車両の発進時に一部の車輪にスリップが発生した場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。図4は、制御ハンチング防止周期でブレーキ装置を制御する際の説明図であり、図3のA部における制御信号の説明図である。以上の車両走行制御装置1は、車輪に制動力を付与することができるブレーキ装置200を制御する際における制御周期を、制御周期設定部84で車輪速度の状態に応じて設定しており、複数の車輪の車輪速度の状態が、ハンチングを発生する虞のある状態の場合には、ハンチングを抑制できる制御周期にしている。つまり、図3に示すように、車輪速度VWが全輪でほぼ一定の場合には、自動走行制御ECU8は通常TRC制御周期で自動走行制御を行い、ブレーキ装置制御部83で制御されるブレーキ装置200は、車輪に制動力を付与しないため、ホイールシリンダ210に作用させる油圧である制御周期調整時油圧310は0MPaになる。
【0053】
この状態で車両を走行させ、4つの車輪のうち1つの車輪が空転した場合には、空転中の車輪の車輪速度であり、且つ、制御周期設定部84で制御周期が調整可能なブレーキ装置200で制動力を付与できる車輪の車輪速度である制御周期調整時空転車輪速度300は、速度が上昇する。また、この場合、エンジンからの駆動力は空転している車輪にのみ伝達されるため、その他の車輪には駆動力は伝達されない。このため、4つの車輪のうち、空転している車輪以外の車輪速度である制御周期調整時非空転車輪速度305は、車輪速度が低下して0km/hになる。
【0054】
このように、一部の車輪は空転して制御周期調整時空転車輪速度300は上昇し、その他の車輪は停止して0km/hになった場合には、ブレーキ装置制御部83でブレーキ装置200を制御し、油圧ポンプ215を作動させることによりホイールシリンダ210に油圧を作用させる。このため、制御周期調整時油圧310は上昇する。これにより、空転している車輪には制動力が付与され、空転が抑制されるが、空転が低減して車輪速度が低下を始めたら、空転している車輪が完全に停止しないように、制御周期調整時油圧310を減圧する。
【0055】
このように、制御周期調整時油圧310を減圧する際には、ブレーキ装置200を制御する制御周期を長くして、制御ハンチング防止周期でブレーキ装置200を制御する。制御ハンチング防止周期でブレーキ装置200を制御する場合には、ブレーキ装置制御部83でブレーキ装置200を制御する際における制御周期を、通常のTRC制御時などにおける制御周期よりも長くする。
【0056】
ここで、空転を抑えるために制動力を付与した車輪の制動力を低減する際には、制御周期調整時空転車輪速度300に基づいて徐々に低減させるため、この場合における制御信号は、ホイールシリンダ210に作用させる油圧が保持と減圧とを繰り返すように、制御信号も図4の制御周期調整時制御信号320で示すように、保持と減圧とを繰り返す制御信号を送信する。その際に、制御ハンチング防止周期でブレーキ装置200を制御する場合には、制御周期を通常のTRC制御時における制御周期よりも長くするため、例えば、減圧から保持になり、次の減圧までの期間を、通常のTRC制御時における同期間(図6参照)よりも長くする。
【0057】
このように、制御周期を長くすることにより、制御周期調整時油圧310は高い状態が維持されるので、空転している車輪には制動力が付与され続ける。このため、このように空転している車輪には制動力が付与され続けている間に駆動力は空転している車輪以外の車輪に伝達されるため、この車輪の車輪速度である制御周期調整時非空転車輪速度305は上昇する。これにより、制御周期調整時空転車輪速度300、及び制御周期調整時非空転車輪速度305は、共に目標車輪速度308に近付き、車両は走行することができる。
【0058】
図5は、従来の車両走行制御装置において車両の発進時に一部の車輪にスリップが発生した場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。図6は、従来の車両走行制御装置においてブレーキ装置を制御する際の説明図であり、図5のB部における制御信号の説明図である。一方、従来の車両走行制御装置では、空転している車輪に制動力を付与し、空転している車輪の車輪速度である制御周期一定時空転車輪速度330が低下し始めた場合でも、ブレーキ装置200を制御する際における制御周期は一定であるため、図6の制御周期一定時制御信号350で示すように、短期間で保持と減圧とを繰り返す。このため、制御周期一定時油圧340は低下が早くなり、低下を始めた制御周期一定時空転車輪速度330は、再び上昇する。このため、駆動力は空転している車輪以外の車輪には伝達され難くなり、この車輪の車輪速度である制御周期一定時非空転車輪速度335は、0km/hのままとなる。従って、車両はハンチングが発生した状態になり、制御周期一定時空転車輪速度330と制御周期一定時非空転車輪速度335とは、共に目標車輪速度338には近付かなくなる。
【0059】
図7は、従来の車両走行制御装置において一定速度維持制御を行った場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。また、複数の車輪の車輪速度の状態が、制御周期を短く設定した場合には車両の搭乗者に違和感を与える虞のある状態の場合には、制御周期を長めに設定する。例えば、坂路を下っている状態で一定速度維持制御を行っている際に、坂路が下りの急坂路になった場合、制御周期が一定の場合における車輪速度である制御周期一定時車輪速度380は上昇するため、この場合におけるブレーキの油圧である制御周期一定時油圧390は、上昇した制御周期一定時車輪速度380を低下させるために、上昇させる。これにより、車輪には制動力が付与されるため、制御周期一定時車輪速度380は低下する。制御周期一定時車輪速度380が低下し、目標車輪速度385に近付いたら、制御周期一定時油圧390を低下させる。これにより、制御周期一定時車輪速度380は再び上昇する。また、悪路坂道では、制御周期一定時車輪速度380が目標車輪速度385に近付くように、制御周期一定時油圧390を変化させる。
【0060】
従来の車両走行制御装置で一定速度維持制御をしている際に、下りの急坂路を走行する際には、このように、制御周期一定時車輪速度は変化し続けるため、車速も変化し続ける。これにより、車両の搭乗者は違和感を覚える虞がある。
【0061】
これに対し、実施例に係る車両走行制御装置1では、一定速度維持制御をしている場合には、ブレーキ装置200を制御する制御周期を、通常のTRC制御時における制御周期よりも長い一定速度維持制御周期で制御する。図8は、実施例に係る車両走行制御装置において一定速度維持制御を行った場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。これにより、車両が下りの急坂路を走行することにより、制御周期を調整する場合における車輪速度である制御周期調整時車輪速度360が上昇した場合でも、この場合における油圧である制御周期調整時油圧370が低下し難くなるため、車輪には制動力が付与され続ける。このため、制御周期調整時車輪速度360は、車両が下りの急坂路を走行した場合でも変化し難くなり、目標車輪速度365に近い状態を維持することができる。また、車両が悪路坂路を走行する場合には、制御周期を通常TRC制御周期にし、頻繁に変化する路面の状況に合わせて、制御周期調整時油圧を頻繁に変化させる。
【0062】
これらのように、一部の車輪が空転することにより他の車輪に駆動力が伝達されなくなった状態で、車輪速度VWを目標車輪速度に近付ける場合にハンチングを発生する虞のある状態の場合には、制御周期を長くして制御ハンチング防止周期にすることにより、ハンチングを抑制できる。また、一定速度維持制御をする際、制御周期を長くして一定速度維持制御周期にすることにより、車両の搭乗者は違和感を抑制できる。これらの結果、ハンチングや違和感を抑制することができる。
【0063】
また、制御周期設定部84は、このように、例えば悪路坂路を走行する場合には通常TRC制御周期にし、坂路や急坂道を走行する場合には一定速度維持制御周期にすることにより、制御周期を長くしている。つまり、制御周期設定部84は、車両が走行する路面の変動状態に基づいて前記制御周期を設定可能に設けられており、路面の変動が比較的小さい場合には変動が比較的大きい場合よりも制御周期を長くしている。車両が一定速度で走行をしている場合において路面の変動が小さい場合には、車輪速度VWが変化する要因が少ないため、このような場合にブレーキ装置200の制御周期を長くすることにより、頻繁にブレーキ装置200で制動力を付与したり制動力を解除したりした場合の不必要な速度変動を抑制できる。また、ブレーキ装置200を作動させるためにソレノイド220などの作動部材が設けられていた場合、ブレーキ装置200の制御周期を長くすることにより、頻繁にブレーキ装置200で制動力を付与したり制動力を解除したりした場合のようにソレノイド220が頻繁に作動することを抑制できる。この結果、より確実に違和感を抑制することができる。
【0064】
また、制御周期設定部84は、車輪速度センサ3で検出した車輪速度VWより駆動輪が空転していると判定される場合は、駆動輪が空転していない場合よりも制御周期を長くしている。つまり、車両の走行時において、空転していると判定される駆動輪は、接地していない虞がある。駆動輪が空転した場合には、この駆動輪が所定の車輪速度VWになるように制動力を付与するが、この場合、制御周期が短いと、車輪速度VWが収束したとしても、制動力を下げると再び空転してしまう虞がある。このため、この場合には制御周期を長くすることにより、空転している駆動輪の車輪速度VWを、より確実に収束させることができ、駆動力を他の駆動輪により確実に伝達することができる。この結果、より確実にハンチングを抑制することができる。
【0065】
制御周期設定部84は、車輪速度センサ3で検出した車輪速度VWより、複数の車輪間における車輪速度VWの差である車輪速差(VWMAX−VWMIN)が所定の範囲(図2、ステップST104、KV)内の場合は、車輪速差が所定の範囲外の場合よりも制御周期を長くしている。これにより、一定速度で走行している場合における不必要な速度変動をより確実に抑制できる。また、制御周期を長くすることにより、ブレーキ装置200を作動させるためにソレノイド220が設けられていた場合でも、より確実にソレノイド220が頻繁に作動することによる作動音を抑制することができる。この結果、より確実に違和感を抑制することができる。
【0066】
制御周期設定部84は、車輪速差が所定の範囲(KV)内にある時間が所定時間(図2、ステップST104、KT)以上の場合は、車輪速差が所定の範囲内にある時間が所定時間未満の場合よりも制御周期を長くしている。つまり、車輪速差が所定の範囲内にある時間が所定時間以上の場合は、路面の変動が小さく、一定速度で走行している確実性が高いため、この場合に制御周期を長くすることにより、より確実に一定速度で走行している場合における不必要な速度変動や、ブレーキ装置200のソレノイド220が頻繁に作動することによる作動音を抑制することができる。この結果、より確実に違和感を抑制することができる。
【0067】
また、駆動輪の車輪速度VWは、エンジン100の駆動力とブレーキ装置200の制動力とにより制御しており、ブレーキ装置200の制御周期は、当該ブレーキ装置200を制御する際における制御周期を車輪速度VWの状態に応じて設定している。このため、駆動輪の車輪速度VWの状態が、ハンチングを発生する虞のある状態の場合には、ハンチングを抑制できる制御周期にする。また、駆動輪の車輪速度VWの状態が、制御周期を短く設定した場合には駆動輪を備える車両の搭乗者に違和感を与える虞のある状態の場合には、制御周期を長めに設定する。この結果、ハンチングや違和感を抑制することができる。
【産業上の利用可能性】
【0068】
以上のように、本発明に係る車両走行制御装置は、車両の自動走行制御を行う車両走行制御装置に有用であり、特に、車輪に制動力を与えることにより速度調整を行う制御を含む車両走行制御装置に適している。
【図面の簡単な説明】
【0069】
【図1】実施例に係る車両走行制御装置の構成例を示す図である。
【図2】実施例に係る車両走行制御装置の自動走行制御ECUで行う動作フローを示す説明図である。
【図3】車両の発進時に一部の車輪にスリップが発生した場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。
【図4】制御ハンチング防止周期でブレーキ装置を制御する際の説明図であり、図3のA部における制御信号の説明図である。
【図5】従来の車両走行制御装置において車両の発進時に一部の車輪にスリップが発生した場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。
【図6】従来の車両走行制御装置においてブレーキ装置を制御する際の説明図であり、図5のB部における制御信号の説明図である。
【図7】従来の車両走行制御装置において一定速度維持制御を行った場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。
【図8】実施例に係る車両走行制御装置において一定速度維持制御を行った場合における車輪速度の変化、及びブレーキの油圧の変化を示す説明図である。
【符号の説明】
【0070】
1 車両走行制御装置
2 自動走行制御スイッチ
3 車輪速度センサ
4 Gセンサ
5 ブレーキスイッチ
6 アクセルセンサ
8 自動走行制御ECU
9 エンジンECU
10 ブレーキECU
81 自動走行制御判定部
82 駆動力算出部
83 ブレーキ装置制御部
84 制御周期設定部
100 エンジン
200 ブレーキ装置
210 ホイールシリンダ
215 油圧ポンプ
220 ソレノイド
【特許請求の範囲】
【請求項1】
車両が有する複数の車輪の回転速度である車輪速度をそれぞれの前記車輪で独立して検出する車輪速度検出手段と、
前記車輪に制動力を付与することができる制動手段と、
前記車輪速度検出手段で検出した前記車輪速度が目標となる車輪速度になるように所定の制御周期で前記制動手段を制御して前記車輪に制動力を付与する制動手段制御手段と、
前記制動手段を制御する際における前記制御周期を前記車輪速度の状態に応じて設定する制御周期設定手段と、
を備えることを特徴とする車両走行制御装置。
【請求項2】
前記制御周期設定手段は、前記車両が走行する路面の変動状態に基づいて前記制御周期を設定可能に設けられており、前記路面の変動が比較的小さい場合には変動が比較的大きい場合よりも前記制御周期を長くすることを特徴とする請求項1に記載の車両走行制御装置。
【請求項3】
前記制御周期設定手段は、前記車輪速度検出手段で検出した前記車輪速度より駆動輪が空転していると判定される場合は、駆動輪が空転していない場合よりも前記制御周期を長くすることを特徴とする請求項1または2に記載の車両走行制御装置。
【請求項4】
前記制御周期設定手段は、前記車輪速度検出手段で検出した前記車輪速度より、前記複数の車輪間における前記車輪速度の差である車輪速差が所定の範囲内の場合は、前記車輪速差が所定の範囲外の場合よりも前記制御周期を長くすることを特徴とする請求項1〜3のいずれか1項に記載の車両走行制御装置。
【請求項5】
前記制御周期設定手段は、前記車輪速差が所定の範囲内にある時間が所定時間以上の場合は、前記車輪速差が所定の範囲内にある時間が所定時間未満の場合よりも前記制御周期を長くすることを特徴とする請求項4に記載の車両走行制御装置。
【請求項6】
駆動輪に駆動力を付与する駆動手段を有しており、前記駆動輪の回転速度である車輪速度を目標となる前記車輪速度となるように前記駆動手段を制御する車両走行制御装置において、
前記車輪速度は、前記駆動輪に制動力を付与することができる前記制動手段の前記制動力と前記駆動力とによって目標となる前記車輪速度になるように制御すると共に前記制動手段を制御する際における制御周期を前記車輪速度の状態に応じて設定することを特徴とする車両走行制御装置。
【請求項1】
車両が有する複数の車輪の回転速度である車輪速度をそれぞれの前記車輪で独立して検出する車輪速度検出手段と、
前記車輪に制動力を付与することができる制動手段と、
前記車輪速度検出手段で検出した前記車輪速度が目標となる車輪速度になるように所定の制御周期で前記制動手段を制御して前記車輪に制動力を付与する制動手段制御手段と、
前記制動手段を制御する際における前記制御周期を前記車輪速度の状態に応じて設定する制御周期設定手段と、
を備えることを特徴とする車両走行制御装置。
【請求項2】
前記制御周期設定手段は、前記車両が走行する路面の変動状態に基づいて前記制御周期を設定可能に設けられており、前記路面の変動が比較的小さい場合には変動が比較的大きい場合よりも前記制御周期を長くすることを特徴とする請求項1に記載の車両走行制御装置。
【請求項3】
前記制御周期設定手段は、前記車輪速度検出手段で検出した前記車輪速度より駆動輪が空転していると判定される場合は、駆動輪が空転していない場合よりも前記制御周期を長くすることを特徴とする請求項1または2に記載の車両走行制御装置。
【請求項4】
前記制御周期設定手段は、前記車輪速度検出手段で検出した前記車輪速度より、前記複数の車輪間における前記車輪速度の差である車輪速差が所定の範囲内の場合は、前記車輪速差が所定の範囲外の場合よりも前記制御周期を長くすることを特徴とする請求項1〜3のいずれか1項に記載の車両走行制御装置。
【請求項5】
前記制御周期設定手段は、前記車輪速差が所定の範囲内にある時間が所定時間以上の場合は、前記車輪速差が所定の範囲内にある時間が所定時間未満の場合よりも前記制御周期を長くすることを特徴とする請求項4に記載の車両走行制御装置。
【請求項6】
駆動輪に駆動力を付与する駆動手段を有しており、前記駆動輪の回転速度である車輪速度を目標となる前記車輪速度となるように前記駆動手段を制御する車両走行制御装置において、
前記車輪速度は、前記駆動輪に制動力を付与することができる前記制動手段の前記制動力と前記駆動力とによって目標となる前記車輪速度になるように制御すると共に前記制動手段を制御する際における制御周期を前記車輪速度の状態に応じて設定することを特徴とする車両走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2009−126306(P2009−126306A)
【公開日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願番号】特願2007−302255(P2007−302255)
【出願日】平成19年11月21日(2007.11.21)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成21年6月11日(2009.6.11)
【国際特許分類】
【出願日】平成19年11月21日(2007.11.21)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]