
車両走行制御装置
【課題】運転者に違和感等が生じることを効果的に防止しつつ、自車両の前方に位置する他車両による割り込みの発生を迅速かつ正確に判定できるようにする。
【解決手段】自車両の前方を走行する先行車両等を検出する前方検出手段1と、自車両の前方を走行する先行車両に追従する追従走行制御等を実行する走行制御手段10を備えた車両用走行制御装置であって、自車両の前方に位置する移動物体等を捕捉する捕捉手段8と、該移動物体が自車両の走行領域内に侵入する割り込みが発生したか否かを判定する割り込み判定手段9とを有し、上記割り込み判定手段9は、捕捉手段8により捕捉された移動物体が自車両の走行領域内に近づく方向に横移動し、かつその横移動速度が設定値以上である場合に、一定時間経過後における上記移動物体の位置を推定して該移動物体の推定位置が自車両の走行領域内に位置する場合に上記移動物体が割り込んでくる状態にあると判定するように構成された。
【解決手段】自車両の前方を走行する先行車両等を検出する前方検出手段1と、自車両の前方を走行する先行車両に追従する追従走行制御等を実行する走行制御手段10を備えた車両用走行制御装置であって、自車両の前方に位置する移動物体等を捕捉する捕捉手段8と、該移動物体が自車両の走行領域内に侵入する割り込みが発生したか否かを判定する割り込み判定手段9とを有し、上記割り込み判定手段9は、捕捉手段8により捕捉された移動物体が自車両の走行領域内に近づく方向に横移動し、かつその横移動速度が設定値以上である場合に、一定時間経過後における上記移動物体の位置を推定して該移動物体の推定位置が自車両の走行領域内に位置する場合に上記移動物体が割り込んでくる状態にあると判定するように構成された。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両の前方を走行する先行車両に追従する追従走行、または自車両の走行速度を目標車速に一致させる定速走行を行うように自車両の走行状態を制御するように構成された車両走行制御装置に関するものである。
【背景技術】
【0002】
従来、下記特許文献1に示されるように、誤判定をより減少させた割込車両判定装置を提供することを目的として、自車両の走行状況を取得する自車両状況取得手段と、他車両状況取得手段によって取得された他車両の走行状況と自車両状況取得手段によって取得された自車両の走行状況とに基づき、他車両が割込車両であるか否かを判定する割込判定手段とを備え、割込判定手段において、他車両の走行状況及び自車両の走行状況のいずれかが所定の条件を満たさないときは、他車両が割込車両である可能性が第1閾値以上のときに、他車両を割込車両であると判定し、他車両の走行状況及び自車両の走行状況のいずれかが所定の条件を満すときは、他車両が割込車両である可能性が第1閾値より高い第2閾値以上のときに、他車両を割込車両であると判定することが行われている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−46845号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示された割込車両判定装置では、例えば自車両が所定の旋回半径以下の小さい旋回半径で旋回している場合、あるいは自車両と他車両との相対速度が所定の相対速度以上と大きい場合等に、自車両近傍の他車両が割込車両である可能性は低いと判断し、割込車両の判定基準値として第1閾値より高い第2閾値を使用することにより、誤判定のおそれを減少させるようにしている。また、上記特許文献1には、顔向きセンサによって運転者の顔向きを検出し、運転者の顔向きが自車両の正面方向か、あるいは割込判定の対象となる他車両の方向を向いている場合は、運転者が当該他車両に十分な注意を払っているものとして、誤判定を避けるために割込車両判定の閾値を高くする処理をする旨の開示がある。
【0005】
しかし、上記のように一方、運転者が割込判定の対象となる他車両の方向を向いているときに割込車両判定の基準となる閾値を高く設定した場合には、上記他車両が自車両の走行領域内に近づきつつあることを運転者が認識しているにも拘わらず、割込車両判定装置において該他車両が割り込み車両であると判定され難くなり、警報装置による報知や、割込車両との接近を回避する走行制御の実行が遅れる可能性がある。このため、割込車両判定装置または警報装置が故障しているのではないかと運転者に不安感や違和感が生じる等の問題があった。
【0006】
本発明は、上記の問題点に鑑みてなされたものであり、運転者に違和感が生じること等を効果的に防止しつつ、自車両の前方に位置する他車両による割り込みの発生を迅速かつ正確に判定することができる車両走行制御装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
請求項1に係る発明は、自車両の前方を走行する先行車両等を検出する前方検出手段と、自車両の前方を走行する先行車両に追従する追従走行、または自車両の走行速度を目標車速に一致させる定速走行を行うように自車両の走行状態を制御する走行制御手段を備えた車両用走行制御装置であって、上記前方検出手段の検出信号に応じて自車両の前方に位置する移動物体等を捕捉する捕捉手段と、該捕捉手段により捕捉された移動物体が自車両の走行領域内に侵入する割り込みが発生したか否かを判定する割り込み判定手段とを有し、上記捕捉手段が、自車両の前方に位置する移動物体の横移動方向および横移動速度を判別する機能を有し、該捕捉手段により捕捉された移動物体の横移動方向が自車両の走行領域外から走行領域内に近づく方向であり、かつその横移動速度が設定値以上である場合に、該横移動速度に応じて一定時間経過後における上記移動物体の位置を推定し、該移動物体の推定位置が自車両の走行領域内に位置する場合に上記移動物体が割り込んでくる状態にあると上記割り込み判定手段により判定するように構成されたものである。
【0008】
請求項2に係る発明は、上記請求項1に記載の車両走行制御装置において、上記割り込み判定手段により自車両の前方を走行する移動物体による割り込みが発生したと判定された場合に、該移動物体を先行車両とした追従走行制御を上記走行制御手段により実行するように構成されたものである。
【0009】
請求項3に係る発明は、上記請求項1または2に記載の車両走行制御装置において、上記捕捉手段により捕捉された移動物体の横移動方向が自車両の走行領域に近づく方向ではない場合、あるいはその横移動速度が設定値未満である場合に、上記移動物体の推定位置に基づく割り込み判定を行うことなく、該移動物体の現在位置に基づいて割り込み判定を上記割り込み判定手段において行うように構成されたものである。
【0010】
請求項4に係る発明は、上記請求項3に記載の車両走行制御装置において、割り込み判定手段において設定された移動ゲインαと、上記移動物体の横移動速度とを掛け合わせることにより求めた横移動距離および上記移動方向とに基づき、一定時間経過後における移動物体の位置を推定するように構成されたものである。
【0011】
請求項5に係る発明は、上記請求項4に記載の車両走行制御装置において、割り込み判定の対象となる移動物体と自車両との車間距離が増大するのに応じて上記移動ゲインαが小さな値に設定されるよう構成されたものである。
【0012】
請求項6に係る発明は、上記請求項4または5に記載の車両走行制御装置において、割り込み判定の対象となる移動物体と自車両との速度差が増大するのに応じて上記移動ゲインαが小さな値に設定されるように構成されたものである。
【0013】
請求項7に係る発明は、上記請求項1〜6のいずれか1項に記載の車両走行制御装置において、上記捕捉手段により新たに捕捉された第2移動物体の前方に位置する第1移動物体を対象とした割り込み判定を上記割り込み判定手段により既に実行している状態にあることが確認された場合に、当該第1移動物体と上記第2移動物体がとの距離が予め設定された一定値以下である否かを判定し、一定値以下であることが確認された場合に、上記第2移動物体の推定位置に基づく割り込み判定を行うことなく、該第2移動物体の現在位置に基づいて該第2移動物体が上記自車両の走行領域内に侵入する割り込みが発生したか否かを判定するように構成されたものである。
【発明の効果】
【0014】
請求項1に係る発明では、捕捉手段において捕捉された移動物体の横移動方向が自車両の走行領域外から走行領域内に近づく方向であり、かつその横移動速度が設定値以上である場合に、上記割り込み判定手段により一定時間経過後における移動物体の位置を推定し、該移動物体の推定位置に基づいて割り込み判定を行うように構成したため、自車両の前方において自車両の走行領域外から走行領域内に侵入する可能性が高い移動物体が存在する場合に、該移動物体による割り込みの発生を迅速かつ正確に判定することができ、当該判定結果に基づいて上記割り込みが発生する状態にあることを表示装置に事前に表示させて報知する等により、運転者に適切な対応を採るように促すことができる。
【0015】
請求項2に係る発明では、割り込み判定手段において自車両の前方を走行する移動物体による割り込みが発生したと判定された場合に、該移動物体を先行車両とした追従走行制御を上記走行制御手段において実行するように構成したため、上記移動物体に自車両が近付きすぎるという事態の発生を効果的に防止しつつ、先行車両を適正に変更した状態で追従走行制御を継続して実行できるという利点がある。
【0016】
請求項3に係る発明では、上記捕捉手段により捕捉された移動物体の横移動方向が自車両の走行領域に近づく方向ではない場合、あるいはその横移動速度が設定値未満である場合に、上記移動物体の推定位置に基づく割り込み判定を行うことなく、該移動物体の現在位置に基づいて割り込み判定を行うように構成したため、自車両の走行領域内に割り込む可能性が低い移動物体を対象とした推定制御が実行されることに起因した誤判定の発生を防止できるとともに、上記移動物体が横移動速度等を変更して自車両の走行領域内に急接近してきた場合には、該移動物体の現在位置に基づいて自車両の走行領域内に他車両が侵入する割り込みが発生したか否か判定し、当該割り込みが発生したことが確認された時点で、当該割り込みの発生を表示装置に表示させ、あるいは上記移動物体を先行車両とした追従走行制御に移行する等の制御を上記割り込み判定手段において実行することができる。
【0017】
請求項4に係る発明では、該割り込み判定手段において設定された移動ゲインαと、上記移動物体の横移動速度とを掛け合わせることにより求めた横移動距離および上記移動方向とに基づき、一定時間経過後における移動物体の位置を推定するように構成したため、自車両の前方に位置する移動物体で自車両の走行領域外から走行領域内に侵入する可能性が高い移動物体が存在する場合に、該移動物体の推定位置に基づいて該移動物体による割り込みの発生を迅速かつ正確に予知することができ、当該割り込みが発生する状態にあることを表示装置に事前に表示させる等により、運転者に適切な対応を採るように促すことができる。
【0018】
請求項5に係る発明では、割り込み判定の対象となる移動物体と自車両との車間距離が増大するのに応じて上記移動ゲインαを小さな値に設定するよう構成したため、自車両とその前方に位置する他車両との車間距離が大きいために該他車両が自車両の走行領域内に割り込んできても、それ程顕著な影響がない状態にある場合に、該他車両の推定位置に基づいて該他車両による割り込みが発生した判定される確率を効果的に低減し、当該判定結果に基づいた不必要な制御が実行されるという事態の発生を効果的に防止できるという利点がある。
【0019】
請求項6に係る発明では、割り込み判定の対象となる移動物体と自車両との速度差が増大するのに応じて上記移動ゲインαを小さな値に設定するように構成している。このため、例えば自車両の前方に位置する移動物体の走行速度が自車両よりも極端に遅く、該移動物体が自車両の前方に位置する走行領域内に割り込む前に自車両が上記移動物体を追い抜く可能性が高い場合には、上記移動ゲインαを小さな値に設定することにより、上記移動物体の推定位置に基づいた不必要な制御が実行されるという事態の発生を効果的に防止することができる。逆に、自車両の前方に位置する移動物体の走行速度が自車両よりも極端に速い場合には、仮に該移動物体が自車両の走行領域内に割り込んできたとしても、上記移動物体が、自車両の前方へ早期に走り去って自車両にそれ程大きな影響を与える可能性が低いと考えられるため、上記移動ゲインαを小さな値に設定することにより、上記移動物体の推定位置に基づいた不必要な制御が実行されることを効果的に防止できるという利点がある。
【0020】
請求項7に係る発明では、上記捕捉手段により新たに捕捉された第2移動物体の前方に位置する第1移動物体を対象とした割り込み判定を上記割り込み判定手段により既に実行している状態にあることが確認された場合に、当該第1移動物体と上記第2移動物体がとの距離が予め設定された一定値以下である否かを判定し、一定値以下であることが確認された場合に、上記第2移動物体の推定位置に基づく割り込み判定を行うことなく、該第2移動物体の現在位置に基づいて該第2移動物体が上記自車両の走行領域内に侵入する割り込みが発生したか否かを判定するように構成したため、上記第2移動体とその前方に位置する第1移動物体との車間距離が小さすぎることに起因して、該第1移動物体の直後に上記第2移動物体が割り込んでくる可能性が極めて低い状態にある場合には、該第2移動物体の推定位置に基づいて該第2移動物体による割り込みが発生したか否を判定することなく、実際の位置に基づく判定制御を実行することにより、上記第2移動体の推定位置に基づいた不必要な制御が実行されることを効果的に防止できるという利点がある。
【図面の簡単な説明】
【0021】
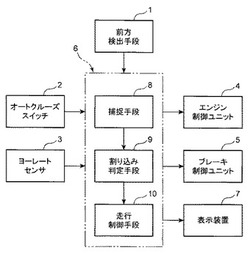
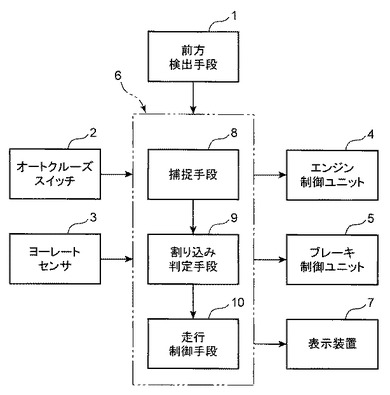
【図1】本発明に係る車両走行制御装置の実施形態を示すブロック図である。
【図2】車両の走行状態を示す説明図である。
【図3】車間距離に応じて移動ゲインαを設定するためのグラフである。
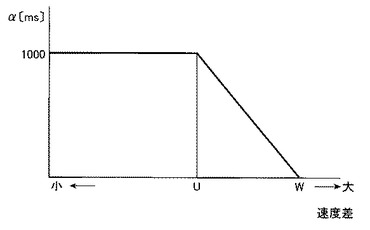
【図4】自車両と他車両との速度差に応じて移動ゲインαを設定するためのグラフである。
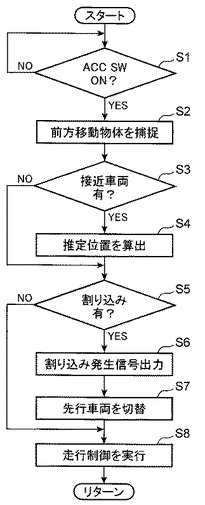
【図5】車両走行制御装置の制御動作を示すフローチャートである。
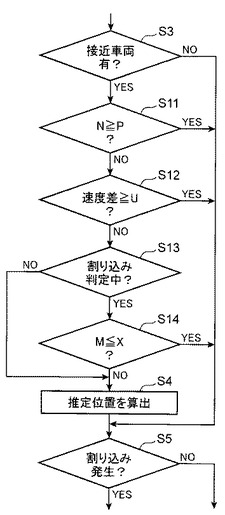
【図6】車両走行制御装置の制御動作の変形例を示すフローチャートである。
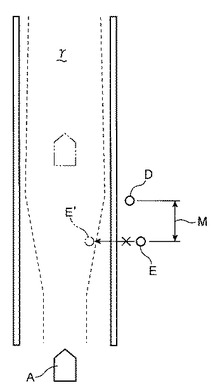
【図7】車両の走行状態の他の例を示す説明図である。
【発明を実施するための形態】
【0022】
図1は、本発明に係る車両走行制御装置の実施形態を示している。該車両走行制御装置には、自車両の前方を走行する先行車両または他車両等を検出する前方検出手段1と、ステアリングホイール等に設けられたアダプティブクルーズコントロール(ACC)スイッチ2と、自車両に作用するヨーレートを検出するヨーレートセンサ3と、エンジン制御ユニット4またはブレーキ制御ユニット5に制御信号を出力することにより自車両の走行状態を制御する走行制御ユニット6と、該走行制御ユニット6の出力信号に応じた後述の割り込み警報等を表示する表示装置7とが設けられている。
【0023】
上記前方検出手段1は、ミリ波またはレーザー光等を車両前方に照射し、その反射波または反射光を受信するまでの時間差に応じて先行車両等の存否や、その位置情報等を検出するレーザー装置、または車両の前方画像を取得するカメラ装置等からなり、自車両の前方に位置する先行車両等のデータを上記走行制御ユニット6に出力するように構成されている。
【0024】
該走行制御ユニット6には、上記前方検出手段1の出力信号に応じて自車両の前方に位置する移動物体等を捕捉する捕捉手段8と、該捕捉手段8により捕捉された移動物体が自車両の走行領域内に侵入する割り込みが発生したか否かを判定する割り込み判定手段9と、自車両の前方を走行する先行車両に追従する追従走行、または自車両の走行速度を目標車速に一致させる定速走行を実行するように上記自車両の走行状態を制御する走行制御手段10とが設けられている。
【0025】
上記捕捉手段8は、前方検出手段1の出力信号に応じて自車両の前方に位置する先行車両またはその他の前方車両等からなる移動物体の位置を捕捉するとともに、その横移動方向を検知し、かつ、その横移動速度を計測する機能を有し、該移動物体の位置、横移動方向および横移動速度の情報を上記割り込み判定手段9に出力するように構成されている。
【0026】
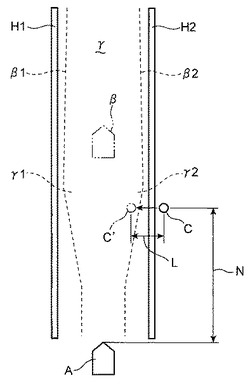
該割り込み判定手段9は、図2に示すように、道路に表示された白線H1,H2の間において、仮想的に表示された左右の判定基準線(破線)β1,β2により区画された領域を、自車両Aの走行領域γとして設定している。該走行領域γは、自車両Aの前方を走行する他車両C等からなる移動物体による割り込みが生じることにより運転者が最も危険だと感じる領域、例えば自車両Aよりも10m程度、前方の領域γ1,γ2を、他の領域よりも左右に拡張した形状に設定されている。
【0027】
そして、通常時には、上記捕捉手段8の出力信号に応じ、自車両Aの前方において走行領域γ外を走行する他車両Cが存在している確認されると、当該他車両Cからなる移動物体が、上記走行領域γ外から走行領域γ内に侵入したことが上記割り込み判定手段9において確認された時点で、上記他車両Cによる割り込みが発生したと判定し、割り込み発生信号を上記走行制御手段10に出力するように構成されている。
【0028】
また、上記捕捉手段8の出力信号に応じ、例えば自車両Aの前方を走行する他車両Cからなる移動物体が自車両Aの走行領域γ外から走行領域γ内へ近づく方向に横移動しており、かつその横移動速度が設定値以上であると上記割り込み判定手段9において判定された場合には、該横移動速度に応じて上記他車両Cの一定時間経過後における位置C′を推定し、該推定位置C′が自車両Aの走行領域γ内に位置する場合に上記他車両Cの割り込みが発生する状態にあると判定し、割り込み発生信号を走行制御手段10に出力するように構成されている。
【0029】
具体的には、上記割り込み判定手段9において、後述するように図3または図4に示すグラフに基づいて設定された移動ゲインαと、上記移動物体の横移動速度Vとを掛け合わせることにより、現時点から一定時間経過するまで間に上記他車両Cが移動すると想定される横移動距離L(=α×V)を算出する。そして、上記捕捉手段8の出力信号に応じて特定された他車両Cの現在位置を示す座標に、上記横移動距離Lを加算することにより、現時点から一定時間経過後に上記他車両Cが位置していると思われる推定位置C′の座標が求められるようになっている。
【0030】
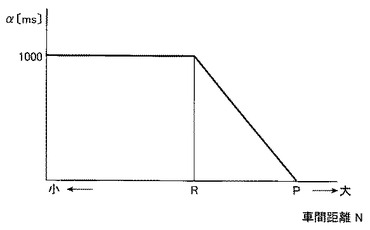
図3は、自車両Aとその前方に位置する他車両Cとの車間距離に応じて上記移動ゲインαを設定するためのグラフであり、上記車間距離Nが一定値R未満の領域では、上記移動ゲインαが最大値である1000(ms)、つまり1秒に設定されるようになっている。また、上記車間距離Nが一定値R以上の領域では、車間距離Nが増大するに応じて上記移動ゲインαがリニアに減少し、割り込み判定の対象となる他車両Cと自車両Aとがある程度、離間している場合には、両者が接近している場合に比べて上記移動ゲインαが小さな値に設定されるようになっている。
【0031】
そして、上記車間距離Nが所定値Pとなった時点で、上記移動ゲインαが0になるように設定される。このように車間距離Nが所定値P以上となって、自車両Aと他車両Cとの車間距離Nが充分に確保されていることが場合には、現時点から一定時間が経過する間に上記他車両Cが移動すると想定される横移動距離Lが0に設定されることにより、上記他車両Cの一定時間経過後における推定位置C′に基づく割り込み判定が行われることなく、上記他車両Cの現在位置に基づいて該他車両Cが上記自車両の走行領域γ内に侵入する割り込みが発生したか否かを判定する通常の判定制御が実行されることになる。
【0032】
図4は、自車両Aの走行速度とその前方に位置する他車両Cの走行速度との速度差に応じて上記移動ゲインαを設定するためのグラフであり、上記速度差が一定値U未満の領域では、上記移動ゲインαが最大値である1000(ms)、つまり1秒に設定されるようになっている。また、上記速度差が一定値U以上の領域では、該速度差が増大するのに応じて上記移動ゲインαがリニアに減少し、割り込み判定の対象となる他車両Cの走行速度と自車両Aの走行速度との間に大きな速度差がある場合には、両者の走行速度が近い場合に比べて上記移動ゲインαが小さな値に設定されるようになっている。
【0033】
そして、上記速度差が所定値Wとなった時点で、上記移動ゲインαが0になるように設定される。このように速度差が所定値W以上となって、自車両Aの走行速度が他車両Cよりも顕著に速い場合、または自車両Aの走行速度が他車両Cよりも顕著に遅い場合の何れかの状態にあることが場合には、現時点から一定時間が経過する間に上記他車両Cが移動すると思われる横移動距離Lが0に設定されることにより、上記他車両Cの一定時間経過後における推定位置C′に基づく割り込み判定が行われず、上記他車両Cの現在位置に基づいて該他車両Cが上記自車両の走行領域γ内に侵入する割り込みが発生したか否かを判定する通常の判定制御が行われることになる。
【0034】
上記走行制御手段10は、ステアリングホイール等に設けられたアダプティブクルーズコントロールスイッチ2が操作されて追従走行制御を実行することが指示された場合に、運転者が車間距離の設定スイッチを操作することにより設定された目標車間距離、または車両の走行速度に応じて自動的に設定された目標車間距離と、上記前方検出手段1の出力に応じて自車両Aおよびその前方を走行する先行車両B間の実車間距離との差を測定し、該実車間距離と上記目標車間距離との差に対応した制御信号をエンジン制御ユニット4またはブレーキ制御ユニット5に制御信号を出力することにより、必要に応じて自車両Aを加速または減速して先行車両との車間距離を一定に維持し、もしくは設定車間時間を一定に維持する制御を実行するように構成されている。
【0035】
なお、上記走行制御手段10による追従走行の制御状態において、上記前方検出手段1の出力信号に応じて先行車両Bが存在していないことが確認された場合、もしくは先行車両Bを見失うロスト状態が生じたことが確認された場合には、上記追従走行の制御状態から定速走行の制御状態に移行し、予め設定された車速、もしくは運転者が車速設定スイッチを操作することにより設定された車速に自車両Aの走行速度を一致させる制御が上記走行制御手段10により実行されるようになっている。
【0036】
上記走行制御手段10による追従走行制御の実行状態で、上記割り込み判定手段9において自車両Aの前方に位置する他車両C等からなる移動物体が自車両Aの走行領域γ外から走行領域γ内に侵入する割り込みが発生したと判定された場合には、割り込み発生信号を上記表示装置7に出力し、該表示装置7において割り込みが発生したことを表示させる制御を実行するように構成されている。そして、上記追従走行制御の対象となる先行車両を該移動物体(他車両C)に切り替えることにより、上記自車両Aの走行領域γ内に割り込んできた上記移動物体を先行車両とし、当該移動物体と自車両Aとの車間距離等を一定に維持する追従走行制御が上記走行制御手段10において実行されるようになっている。
【0037】
また、上記走行制御手段10は、図外の定速走行スイッチが操作されて定速走行制御を実行することが指示された場合に、上記定速走行スイッチの操作時点における車速を目標車速とし、あるいは運転者が車速設定スイッチを操作することにより設定された車速を目標車速とし、該目標車速と、図外の車速センサにより実車速との差に対応した制御信号をエンジン制御ユニット4またはブレーキ制御ユニット5に制御信号を出力することにより、必要に応じて自車両Aを加速または減速して自車両Aの走行速度を目標車速に一致させる制御を実行するように構成されている。
【0038】
上記走行制御手段10による定速走行制御の実行状態で、上記割り込み判定手段9において自車両Aの前方に位置する他車両Cからなる移動物体による割り込みが発生したと判定された場合には、割り込み発生信号を上記表示装置7に出力するとともに、必要に応じて自車両Aを減速させる制御信号をエンジン制御ユニット4またはブレーキ制御ユニット5に制御信号を出力することにより、自車両の走行領域γ内に割り込みつつある上記他車両Cに自車両Aが接近しすぎるのを防止する制御が、上記走行制御手段10により実行されるようになっている。
【0039】
上記走行制御ユニット6により実行される追従走行の制御時における制御動作を、図5に示すフローチャートに基づいて説明する。上記制御動作がスタートすると、まず上記アダプティブクルーズコントロールスイッチ(ACC SW)2がON操作された追従走行制御の実行状態にあるか否かを判定し(ステップS1)、YESと判定された場合には、上記前方検出手段1の出力信号に応じて自車両Aの前方に位置する移動物体を上記捕捉手段8により捕捉する(ステップS2)。
【0040】
次いで、上記捕捉手段8により捕捉された移動物体の中に、自車両Aの走行領域γ外から走行領域γ内に侵入する可能性の高い接近車両が存在するか否かを判定する(ステップS3)。つまり上記捕捉手段8により捕捉された他車両C等からなる移動物体であって、その横移動方向が自車両の走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である移動物体からなる接近車両が存在しているかをステップS3で判定する。
【0041】
上記ステップS3でNOと判定され、自車両Aの前方に位置する移動物体の中に走行領域γ外から走行領域γ内に侵入する可能性の高い移動物体(接近車両)が存在していないことが確認された場合には、ステップS5に移行して自車両Aの前方に位置する移動物体の現在位置に基づき、該移動物体が上記自車両の走行領域γ内に侵入する割り込みが発生したか否かを判定する通常の判定制御を実行する。
【0042】
一方、上記ステップS3でYESと判定され、自車両Aの前方に位置する移動物体の中から走行領域γ外から走行領域γ内に侵入する可能の高い他車両Cからなる移動物体(接近車両)が存在していることが確認された場合には、現時点から一定時間経過後に上記他車両Cが位置していると思われる推定位置C′を算出する(ステップS4)。具体的には、図3または図4に示すグラフに基づいて設定された移動ゲインαと、上記他車両Cの横移動速度Vとを掛け合わせることにより、現時点から一定時間経過するまで間に上記他車両Cが移動すると想定される横移動距離L(=α×V)を算出し、上記捕捉手段8の出力信号に応じて特定された上記移動物体の現在位置の座標に、上記横移動距離Lを加算することにより、上記他車両Cの推定位置C′を求める。その後、上記推定位置C′に基づいて他車両Cが一定時間経過後に自車両の走行領域γ内に割り込んでくる状態にあるか否かを判定する(ステップS5)。
【0043】
そして、上記ステップS5においてYES、つまり自車両Aの前方に走行する移動物体の現在位置に基づいて該移動物体が上記自車両の走行領域γ外から走行領域γ内に侵入したと判定された場合、または上記移動物体が一定時間経過後における推定位置に基づいて該移動物体が自車両の走行領域γ内に割り込んでくる状態にあると判定された場合には、上記移動物体による割り込みが発生したことを示す割り込み発生信号を上記表示装置7に出力するとともに(ステップS6)、追従走行制御の対象となる先行車両Bを、自車両Aの走行領域γ内に新たに割り込んできた上記他車両Cからなる移動物体に切り替えた後(ステップS7)、当該移動物体と自車両Aとの車間距離等を一定に維持する追従走行制御を上記走行制御手段10において実行する(ステップS8)。
【0044】
一方、上記ステップS5においてそれぞれNOと判定された場合には、直接上記ステップS8に移行することにより、自車両Aの前方を走行する先行車両Bに追従し、あるいは自車両Aの走行速度を目標車速に維持する現在の走行制御状態を継続して実行した後、リターンする。
【0045】
上記のように自車両Aの前方を走行する先行車両B等を検出する前方検出手段1と、自車両Aの前方を走行する先行車両Bに追従する追従走行、または自車両Aの走行速度を目標車速に一致させる定速走行を実行するように自車両Aの走行状態を制御する走行制御手段10を備えた車両用走行制御装置において、上記前方検出手段1の検出信号に応じて自車両Aの前方に位置する移動物体等を捕捉する捕捉手段8と、該捕捉手段8により捕捉された移動物体が自車両Aの走行領域γ内に侵入する割り込みが発生したか否かを判定する割り込み判定手段9とを設け、上記捕捉手段8により、自車両Aの前方に位置する移動物体の横移動方向および横移動速度を判別し、捕捉手段8において捕捉された移動物体の横移動方向が自車両Aの走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である場合に、該横移動速度に応じて一定時間経過後における上記移動物体の位置を上記割り込み判定手段9により推定し、該移動物体の推定位置が自車両Aの走行領域γ内に位置する場合に上記移動物体が割り込でんくる状態にあると判定するように構成したため、運転者に違和感等を与えることなく、自車両Aの前方に位置する他車両Cによる割り込の発生を迅速かつ正確に判定することができ、当該判定結果に応じた車両の走行制御等を適正に実行できるという利点がある。
【0046】
すなわち、上記実施形態では、捕捉手段8において捕捉された移動物体の横移動方向が自車両Aの走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である場合に、上記割り込み判定手段9において設定された移動ゲインαと、上記移動物体の横移動速度Vとを掛け合わせることにより該移動物体の横移動距離Lを求め、該横移動距離Lと上記移動方向とに基づき、一定時間経過後における移動物体の位置C′を推定するように構成したため、自車両Aの前方に位置する他車両Bで自車両Aの走行領域γ外から走行領域γ内に侵入する可能性が高い他車両Cが存在する場合に、該他車両Cの推定位置C′に基づいて該他車両Cによる割り込みの発生を迅速かつ正確に予知することができ、当該割り込みが発生する状態にあることを表示装置7に事前に表示させる等により、運転者に適切な対応を採るように促すことができる。
【0047】
例えば、上記実施形態では、割り込み判定手段9において自車両Aの前方を走行する移動物体による割り込みが発生したと判定された場合に、該移動物体を先行車両Bとした追従走行制御を上記走行制御手段10において実行するように構成したため、上記移動物体に自車両Aが近付きすぎるという事態の発生を効果的に防止しつつ、先行車両Bを適正に変更した状態で追従走行制御を継続して実行できるという利点がある。
【0048】
また、上記実施形態では、捕捉手段8により捕捉された移動物体の横移動方向が自車両Aの走行領域γに近づく方向ではない場合、あるいはその横移動速度が設定値未満である場合に、上記移動物体の推定位置に基づく割り込み判定を上記割り込み判定手段9において行うことなく、該移動物体の現在位置に基づいて割り込み判定を行うように構成したため、自車両の走行領域γ内に割り込む可能性が低い移動物体を対象とした推定制御が実行されることに起因した誤判定の発生を防止できるという利点がある。
【0049】
しかも、上記移動物体が横移動方向または横移動速度等を変更して自車両Aの走行領域γ内に急接近してきた場合には、該移動物体の現在位置に基づいて自車両Aの走行領域γ内に他車両が侵入する割り込みが発生したか否か判定し、当該割り込みが発生したことが確認された時点で、表示装置7に表示させ、あるいは該移動物体を先行車両Bとした追従走行の制御状態へ移行を上記割り込み判定手段9において実行することができる。
【0050】
さらに、上記実施形態では、捕捉手段8において捕捉された他車両C等からなる移動物体の横移動方向が自車両Aの走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である場合に、図3に示すように、割り込み判定の対象となる他車両Cと自車両Aとの車間距離Nが増大するのに応じて上記移動ゲインαを小さな値に設定するように構成したため、自車両Aと上記他車両Cとの車間距離Nが大きい場合には、該車間距離Nが小さい場合に比べて上記移動ゲインαが小さな値に設定されることになる。したがって、自車両Aとその前方に位置する他車両Cとの車間距離Nが大きいために該他車両Cが自車両Aの走行領域γ内に割り込んできても、それ程顕著な影響がない状態にある場合に、該他車両Cの推定位置C′に基づいて該他車両Cによる割り込みが発生した判定される確率を効果的に低減し、これによって当該判定結果に基づいた不必要な制御が実行されるという事態の発生を効果的に防止できるという利点がある。
【0051】
また、図4に示すグラフに基づいて、自車両Aの走行速度とその前方に位置する他車両C等からなる移動物体の走行速度との速度差に応じて上記移動ゲインαを設定する等により、割り込み判定の対象となる移動物体と自車両Aとの速度差が増大するのに応じて上記移動ゲインαを小さな値に設定するように構成した場合においても、自車両Aの走行領域γ内に割り込む可能性が低い他車両Cを対象とした割り込み判定、あるいは割り込んできてもそれ程顕著な影響がない状態にある他車両Cの推定位置C′に基づいて割り込み判定が行われることによる不必要な制御の実行を効果的に防止することができる。
【0052】
例えば、自車両Aの前方に位置する他車両Cの走行速度が自車両Aよりも極端に遅い場合には、該他車両Cが自車両Aの前方に位置する走行領域γ内に割り込む前に自車両Aが上記他車両Cを追い抜く可能性が高いため、上記移動ゲインαを小さな値に設定することにより、上記他車両Cの推定位置C′に基づいた不必要な判定が行われるという事態の発生を効果的に防止できるという利点がある。
【0053】
逆に、自車両Aの前方に位置する他車両Cの走行速度が自車両よりも極端に早い場合には、仮に該他車両Cが自車両Aの走行領域γ内に割り込んできたとしても、上記他車両Cは、自車両Aの前方へ早期に走り去って自車両Aにそれ程大きな影響を与える可能性が低いと考えられるため、上記移動ゲインαを小さな値に設定することにより、上記他車両Cの推定位置C′に基づいた不必要な判定が行われるという事態の発生を効果的に防止できるという利点がある。
【0054】
なお、自車両Aの走行領域γ内に割り込む可能性が低い他車両を対象とした割り込み判定が行われることによる不必要な制御の実行を、より効果的に防止するため、図5に示すフローチャートのステップS3において、上記捕捉手段8により捕捉された移動物体であって、その横移動方向が自車両Aの走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である移動物体が存在していると判定された場合においても、その全ての一定時間経過後における位置を推定する必要はなく、その判定対象となる移動物体を必要なもののみに限定することが望ましい。
【0055】
例えば、図6に示すように、ステップS3においてYESと判定され、自車両Aの前方に位置する移動物体であって、その横移動方向が自車両の走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である接近車両が存在していることが確認された場合には、上記移動物体と自車両との車間距離Nが、予め設定された一定の値に設定された基準値、または車速等に対応して適宜の値に設定された基準値P以上あるか否かを判定する。(ステップS11)。
【0056】
上記ステップS11でYESと判定された場合には、上記移動物体の推定位置に基づく割り込み判定を行うことなく、直接、ステップS5に移行して上記移動物体の現在位置に基づいて該移動物体が上記自車両の走行領域γ内に侵入する割り込みが発生したか否かを判定する通常の判定制御を実行する。これにより、自車両とその前方に位置する移動物体との車間距離Nが大きいために該移動物体が自車両Aの走行領域γ内に割り込んできてもそれ程顕著な影響がない状態にあるにも拘わらず、該移動物体の推定位置に基づいて該移動物体による割り込みが発生したか否を判定するという不必要な判定制御が実行されることを効果的に防止することができる。
【0057】
これに対して上記ステップS11でNOと判定され、上記移動物体と自車両Aとの車間距離Nが基準値P未満あるであることが確認された場合には、上記移動物体の走行速度と自車両の速速度との速度差が、予め設定された一定の値に設定された基準値、または車速等に対応して適宜の値に設定された基準値U以上であるか否かを判定する(ステップS12)。
【0058】
上記ステップS12でYESと判定された場合には、上記移動物体の推定位置に基づく割り込み判定を行うことなく、直接、ステップS5に移行し、上記移動物体の現在位置に基づいて該移動物体による割り込みが発生したか否かを判定する通常の判定制御を実行する。これにより、上記移動物体と自車両Aとの速度差が大きいために、該移動物体が自車両Aの走行領域γ内に割り込んできてもそれ程顕著な影響がないか、あるいは該移動物体が自車両Aの走行領域γ内に割り込む可能性が極めて低いにも拘わらず、該移動物体の推定位置に基づいて該移動物体による割り込みが発生したか否を判定するという不必要な判定制御が行われるのを効果的に防止することができる。
【0059】
一方、上記ステップS12でNOと判定され、上記移動物体と自車両Aとの速度差が基準値U未満であることが確認された場合には、上記移動物体とは別の移動物体を対象とした割り込み判定の制御を既に実行中であるか否かを判定する(ステップS13)。該ステップS13でNOと判定されたされた場合には、ステップS4に移行して現時点から一定時間経過後に上記移動物体が位置していると思われる推定位置を求めた後、該推定位置に基づいて該移動物体が一定時間経過後に自車両の走行領域γ内に割り込んでくる状態にあるか否かを判定する(ステップS5)。
【0060】
そして、上記ステップS13でYESと判定され、図7に示すように、上記捕捉手段8により新たに捕捉された第2移動物体Eの前方に位置する第1移動物体Dを対象とした割り込み判定を既に実行している状態にあることが確認された場合には、当該第2移動物体Eと上記第1移動物体Dとの車間距離Mが予め設定された一定値X以下である否かを判定し(ステップS14)、NOと判定された場合には、上記ステップS4に移行して現時点から一定時間経過後に上記第2移動物体Eが位置していると思われる推定位置E′を求めた後、該推定位置E′に基づいて該第2移動物体Eが一定時間経過後に自車両Aの走行領域γ内に割り込んでくる状態にあるか否かを判定する(ステップS6)。
【0061】
これに対して上記ステップS14でYESと判定され、第1移動物体Dと上記第2移動物体Eがとの車間距離Mが予め設定された一定値X以下であることが確認された場合には、上記第2移動物体Eの推定位置E′に基づく割り込み判定を行うことなく、ステップS5に移行して上記第2移動物体Eの現在位置に基づいて該第2移動物体Eが上記自車両の走行領域γ内に侵入する割り込みが発生したか否かを判定する通常の判定制御を実行する。これにより、上記第2移動体Eとその前方に位置する第1移動物体Dとの車間距離Mが小さすぎることに起因して、該第1移動物体Dの直後に上記第2移動物体Eが割り込んでくる可能性が極めて低い状態にある場合には、該第2移動物体Eの推定位置E′に基づいて該第2移動物体Eによる割り込みが発生したか否を判定することなく、実際の位置に基づく判定制御が実行され、これによって上記第2移動体の推定位置に基づいた不必要な制御が実行されるのを効果的に防止することができる。
【0062】
また、上記ヨーレートセンサ3の出力信号等に応じて自車両が旋回状態にあると判定された場合に、上記移動物体の推定位置に基づく割り込み判定制御の実行を禁止するように構成してもよい。この構成によれば、自車両Aが旋回状態にあるために他車両の位置を正確に推定することが困難な状態で、上記移動物体の推定位置に基づく割り込み判定制御が実行されることを防止することができる。したがって、自車両Aの前方を走行する移動物体が自車両の走行領域γ内に割り込んでくる可能性が低いにも拘わらず、該移動物体による割り込みが発生した誤判定されることを効果的に防止できるという利点がある。
【符号の説明】
【0063】
1 前方検出手段
9 割り込み判定手段
10 走行制御手段
A 自車両
B 先行車両
C 他車両
D 第1移動物体
E 第2移動物体
【技術分野】
【0001】
本発明は、自車両の前方を走行する先行車両に追従する追従走行、または自車両の走行速度を目標車速に一致させる定速走行を行うように自車両の走行状態を制御するように構成された車両走行制御装置に関するものである。
【背景技術】
【0002】
従来、下記特許文献1に示されるように、誤判定をより減少させた割込車両判定装置を提供することを目的として、自車両の走行状況を取得する自車両状況取得手段と、他車両状況取得手段によって取得された他車両の走行状況と自車両状況取得手段によって取得された自車両の走行状況とに基づき、他車両が割込車両であるか否かを判定する割込判定手段とを備え、割込判定手段において、他車両の走行状況及び自車両の走行状況のいずれかが所定の条件を満たさないときは、他車両が割込車両である可能性が第1閾値以上のときに、他車両を割込車両であると判定し、他車両の走行状況及び自車両の走行状況のいずれかが所定の条件を満すときは、他車両が割込車両である可能性が第1閾値より高い第2閾値以上のときに、他車両を割込車両であると判定することが行われている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−46845号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示された割込車両判定装置では、例えば自車両が所定の旋回半径以下の小さい旋回半径で旋回している場合、あるいは自車両と他車両との相対速度が所定の相対速度以上と大きい場合等に、自車両近傍の他車両が割込車両である可能性は低いと判断し、割込車両の判定基準値として第1閾値より高い第2閾値を使用することにより、誤判定のおそれを減少させるようにしている。また、上記特許文献1には、顔向きセンサによって運転者の顔向きを検出し、運転者の顔向きが自車両の正面方向か、あるいは割込判定の対象となる他車両の方向を向いている場合は、運転者が当該他車両に十分な注意を払っているものとして、誤判定を避けるために割込車両判定の閾値を高くする処理をする旨の開示がある。
【0005】
しかし、上記のように一方、運転者が割込判定の対象となる他車両の方向を向いているときに割込車両判定の基準となる閾値を高く設定した場合には、上記他車両が自車両の走行領域内に近づきつつあることを運転者が認識しているにも拘わらず、割込車両判定装置において該他車両が割り込み車両であると判定され難くなり、警報装置による報知や、割込車両との接近を回避する走行制御の実行が遅れる可能性がある。このため、割込車両判定装置または警報装置が故障しているのではないかと運転者に不安感や違和感が生じる等の問題があった。
【0006】
本発明は、上記の問題点に鑑みてなされたものであり、運転者に違和感が生じること等を効果的に防止しつつ、自車両の前方に位置する他車両による割り込みの発生を迅速かつ正確に判定することができる車両走行制御装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
請求項1に係る発明は、自車両の前方を走行する先行車両等を検出する前方検出手段と、自車両の前方を走行する先行車両に追従する追従走行、または自車両の走行速度を目標車速に一致させる定速走行を行うように自車両の走行状態を制御する走行制御手段を備えた車両用走行制御装置であって、上記前方検出手段の検出信号に応じて自車両の前方に位置する移動物体等を捕捉する捕捉手段と、該捕捉手段により捕捉された移動物体が自車両の走行領域内に侵入する割り込みが発生したか否かを判定する割り込み判定手段とを有し、上記捕捉手段が、自車両の前方に位置する移動物体の横移動方向および横移動速度を判別する機能を有し、該捕捉手段により捕捉された移動物体の横移動方向が自車両の走行領域外から走行領域内に近づく方向であり、かつその横移動速度が設定値以上である場合に、該横移動速度に応じて一定時間経過後における上記移動物体の位置を推定し、該移動物体の推定位置が自車両の走行領域内に位置する場合に上記移動物体が割り込んでくる状態にあると上記割り込み判定手段により判定するように構成されたものである。
【0008】
請求項2に係る発明は、上記請求項1に記載の車両走行制御装置において、上記割り込み判定手段により自車両の前方を走行する移動物体による割り込みが発生したと判定された場合に、該移動物体を先行車両とした追従走行制御を上記走行制御手段により実行するように構成されたものである。
【0009】
請求項3に係る発明は、上記請求項1または2に記載の車両走行制御装置において、上記捕捉手段により捕捉された移動物体の横移動方向が自車両の走行領域に近づく方向ではない場合、あるいはその横移動速度が設定値未満である場合に、上記移動物体の推定位置に基づく割り込み判定を行うことなく、該移動物体の現在位置に基づいて割り込み判定を上記割り込み判定手段において行うように構成されたものである。
【0010】
請求項4に係る発明は、上記請求項3に記載の車両走行制御装置において、割り込み判定手段において設定された移動ゲインαと、上記移動物体の横移動速度とを掛け合わせることにより求めた横移動距離および上記移動方向とに基づき、一定時間経過後における移動物体の位置を推定するように構成されたものである。
【0011】
請求項5に係る発明は、上記請求項4に記載の車両走行制御装置において、割り込み判定の対象となる移動物体と自車両との車間距離が増大するのに応じて上記移動ゲインαが小さな値に設定されるよう構成されたものである。
【0012】
請求項6に係る発明は、上記請求項4または5に記載の車両走行制御装置において、割り込み判定の対象となる移動物体と自車両との速度差が増大するのに応じて上記移動ゲインαが小さな値に設定されるように構成されたものである。
【0013】
請求項7に係る発明は、上記請求項1〜6のいずれか1項に記載の車両走行制御装置において、上記捕捉手段により新たに捕捉された第2移動物体の前方に位置する第1移動物体を対象とした割り込み判定を上記割り込み判定手段により既に実行している状態にあることが確認された場合に、当該第1移動物体と上記第2移動物体がとの距離が予め設定された一定値以下である否かを判定し、一定値以下であることが確認された場合に、上記第2移動物体の推定位置に基づく割り込み判定を行うことなく、該第2移動物体の現在位置に基づいて該第2移動物体が上記自車両の走行領域内に侵入する割り込みが発生したか否かを判定するように構成されたものである。
【発明の効果】
【0014】
請求項1に係る発明では、捕捉手段において捕捉された移動物体の横移動方向が自車両の走行領域外から走行領域内に近づく方向であり、かつその横移動速度が設定値以上である場合に、上記割り込み判定手段により一定時間経過後における移動物体の位置を推定し、該移動物体の推定位置に基づいて割り込み判定を行うように構成したため、自車両の前方において自車両の走行領域外から走行領域内に侵入する可能性が高い移動物体が存在する場合に、該移動物体による割り込みの発生を迅速かつ正確に判定することができ、当該判定結果に基づいて上記割り込みが発生する状態にあることを表示装置に事前に表示させて報知する等により、運転者に適切な対応を採るように促すことができる。
【0015】
請求項2に係る発明では、割り込み判定手段において自車両の前方を走行する移動物体による割り込みが発生したと判定された場合に、該移動物体を先行車両とした追従走行制御を上記走行制御手段において実行するように構成したため、上記移動物体に自車両が近付きすぎるという事態の発生を効果的に防止しつつ、先行車両を適正に変更した状態で追従走行制御を継続して実行できるという利点がある。
【0016】
請求項3に係る発明では、上記捕捉手段により捕捉された移動物体の横移動方向が自車両の走行領域に近づく方向ではない場合、あるいはその横移動速度が設定値未満である場合に、上記移動物体の推定位置に基づく割り込み判定を行うことなく、該移動物体の現在位置に基づいて割り込み判定を行うように構成したため、自車両の走行領域内に割り込む可能性が低い移動物体を対象とした推定制御が実行されることに起因した誤判定の発生を防止できるとともに、上記移動物体が横移動速度等を変更して自車両の走行領域内に急接近してきた場合には、該移動物体の現在位置に基づいて自車両の走行領域内に他車両が侵入する割り込みが発生したか否か判定し、当該割り込みが発生したことが確認された時点で、当該割り込みの発生を表示装置に表示させ、あるいは上記移動物体を先行車両とした追従走行制御に移行する等の制御を上記割り込み判定手段において実行することができる。
【0017】
請求項4に係る発明では、該割り込み判定手段において設定された移動ゲインαと、上記移動物体の横移動速度とを掛け合わせることにより求めた横移動距離および上記移動方向とに基づき、一定時間経過後における移動物体の位置を推定するように構成したため、自車両の前方に位置する移動物体で自車両の走行領域外から走行領域内に侵入する可能性が高い移動物体が存在する場合に、該移動物体の推定位置に基づいて該移動物体による割り込みの発生を迅速かつ正確に予知することができ、当該割り込みが発生する状態にあることを表示装置に事前に表示させる等により、運転者に適切な対応を採るように促すことができる。
【0018】
請求項5に係る発明では、割り込み判定の対象となる移動物体と自車両との車間距離が増大するのに応じて上記移動ゲインαを小さな値に設定するよう構成したため、自車両とその前方に位置する他車両との車間距離が大きいために該他車両が自車両の走行領域内に割り込んできても、それ程顕著な影響がない状態にある場合に、該他車両の推定位置に基づいて該他車両による割り込みが発生した判定される確率を効果的に低減し、当該判定結果に基づいた不必要な制御が実行されるという事態の発生を効果的に防止できるという利点がある。
【0019】
請求項6に係る発明では、割り込み判定の対象となる移動物体と自車両との速度差が増大するのに応じて上記移動ゲインαを小さな値に設定するように構成している。このため、例えば自車両の前方に位置する移動物体の走行速度が自車両よりも極端に遅く、該移動物体が自車両の前方に位置する走行領域内に割り込む前に自車両が上記移動物体を追い抜く可能性が高い場合には、上記移動ゲインαを小さな値に設定することにより、上記移動物体の推定位置に基づいた不必要な制御が実行されるという事態の発生を効果的に防止することができる。逆に、自車両の前方に位置する移動物体の走行速度が自車両よりも極端に速い場合には、仮に該移動物体が自車両の走行領域内に割り込んできたとしても、上記移動物体が、自車両の前方へ早期に走り去って自車両にそれ程大きな影響を与える可能性が低いと考えられるため、上記移動ゲインαを小さな値に設定することにより、上記移動物体の推定位置に基づいた不必要な制御が実行されることを効果的に防止できるという利点がある。
【0020】
請求項7に係る発明では、上記捕捉手段により新たに捕捉された第2移動物体の前方に位置する第1移動物体を対象とした割り込み判定を上記割り込み判定手段により既に実行している状態にあることが確認された場合に、当該第1移動物体と上記第2移動物体がとの距離が予め設定された一定値以下である否かを判定し、一定値以下であることが確認された場合に、上記第2移動物体の推定位置に基づく割り込み判定を行うことなく、該第2移動物体の現在位置に基づいて該第2移動物体が上記自車両の走行領域内に侵入する割り込みが発生したか否かを判定するように構成したため、上記第2移動体とその前方に位置する第1移動物体との車間距離が小さすぎることに起因して、該第1移動物体の直後に上記第2移動物体が割り込んでくる可能性が極めて低い状態にある場合には、該第2移動物体の推定位置に基づいて該第2移動物体による割り込みが発生したか否を判定することなく、実際の位置に基づく判定制御を実行することにより、上記第2移動体の推定位置に基づいた不必要な制御が実行されることを効果的に防止できるという利点がある。
【図面の簡単な説明】
【0021】
【図1】本発明に係る車両走行制御装置の実施形態を示すブロック図である。
【図2】車両の走行状態を示す説明図である。
【図3】車間距離に応じて移動ゲインαを設定するためのグラフである。
【図4】自車両と他車両との速度差に応じて移動ゲインαを設定するためのグラフである。
【図5】車両走行制御装置の制御動作を示すフローチャートである。
【図6】車両走行制御装置の制御動作の変形例を示すフローチャートである。
【図7】車両の走行状態の他の例を示す説明図である。
【発明を実施するための形態】
【0022】
図1は、本発明に係る車両走行制御装置の実施形態を示している。該車両走行制御装置には、自車両の前方を走行する先行車両または他車両等を検出する前方検出手段1と、ステアリングホイール等に設けられたアダプティブクルーズコントロール(ACC)スイッチ2と、自車両に作用するヨーレートを検出するヨーレートセンサ3と、エンジン制御ユニット4またはブレーキ制御ユニット5に制御信号を出力することにより自車両の走行状態を制御する走行制御ユニット6と、該走行制御ユニット6の出力信号に応じた後述の割り込み警報等を表示する表示装置7とが設けられている。
【0023】
上記前方検出手段1は、ミリ波またはレーザー光等を車両前方に照射し、その反射波または反射光を受信するまでの時間差に応じて先行車両等の存否や、その位置情報等を検出するレーザー装置、または車両の前方画像を取得するカメラ装置等からなり、自車両の前方に位置する先行車両等のデータを上記走行制御ユニット6に出力するように構成されている。
【0024】
該走行制御ユニット6には、上記前方検出手段1の出力信号に応じて自車両の前方に位置する移動物体等を捕捉する捕捉手段8と、該捕捉手段8により捕捉された移動物体が自車両の走行領域内に侵入する割り込みが発生したか否かを判定する割り込み判定手段9と、自車両の前方を走行する先行車両に追従する追従走行、または自車両の走行速度を目標車速に一致させる定速走行を実行するように上記自車両の走行状態を制御する走行制御手段10とが設けられている。
【0025】
上記捕捉手段8は、前方検出手段1の出力信号に応じて自車両の前方に位置する先行車両またはその他の前方車両等からなる移動物体の位置を捕捉するとともに、その横移動方向を検知し、かつ、その横移動速度を計測する機能を有し、該移動物体の位置、横移動方向および横移動速度の情報を上記割り込み判定手段9に出力するように構成されている。
【0026】
該割り込み判定手段9は、図2に示すように、道路に表示された白線H1,H2の間において、仮想的に表示された左右の判定基準線(破線)β1,β2により区画された領域を、自車両Aの走行領域γとして設定している。該走行領域γは、自車両Aの前方を走行する他車両C等からなる移動物体による割り込みが生じることにより運転者が最も危険だと感じる領域、例えば自車両Aよりも10m程度、前方の領域γ1,γ2を、他の領域よりも左右に拡張した形状に設定されている。
【0027】
そして、通常時には、上記捕捉手段8の出力信号に応じ、自車両Aの前方において走行領域γ外を走行する他車両Cが存在している確認されると、当該他車両Cからなる移動物体が、上記走行領域γ外から走行領域γ内に侵入したことが上記割り込み判定手段9において確認された時点で、上記他車両Cによる割り込みが発生したと判定し、割り込み発生信号を上記走行制御手段10に出力するように構成されている。
【0028】
また、上記捕捉手段8の出力信号に応じ、例えば自車両Aの前方を走行する他車両Cからなる移動物体が自車両Aの走行領域γ外から走行領域γ内へ近づく方向に横移動しており、かつその横移動速度が設定値以上であると上記割り込み判定手段9において判定された場合には、該横移動速度に応じて上記他車両Cの一定時間経過後における位置C′を推定し、該推定位置C′が自車両Aの走行領域γ内に位置する場合に上記他車両Cの割り込みが発生する状態にあると判定し、割り込み発生信号を走行制御手段10に出力するように構成されている。
【0029】
具体的には、上記割り込み判定手段9において、後述するように図3または図4に示すグラフに基づいて設定された移動ゲインαと、上記移動物体の横移動速度Vとを掛け合わせることにより、現時点から一定時間経過するまで間に上記他車両Cが移動すると想定される横移動距離L(=α×V)を算出する。そして、上記捕捉手段8の出力信号に応じて特定された他車両Cの現在位置を示す座標に、上記横移動距離Lを加算することにより、現時点から一定時間経過後に上記他車両Cが位置していると思われる推定位置C′の座標が求められるようになっている。
【0030】
図3は、自車両Aとその前方に位置する他車両Cとの車間距離に応じて上記移動ゲインαを設定するためのグラフであり、上記車間距離Nが一定値R未満の領域では、上記移動ゲインαが最大値である1000(ms)、つまり1秒に設定されるようになっている。また、上記車間距離Nが一定値R以上の領域では、車間距離Nが増大するに応じて上記移動ゲインαがリニアに減少し、割り込み判定の対象となる他車両Cと自車両Aとがある程度、離間している場合には、両者が接近している場合に比べて上記移動ゲインαが小さな値に設定されるようになっている。
【0031】
そして、上記車間距離Nが所定値Pとなった時点で、上記移動ゲインαが0になるように設定される。このように車間距離Nが所定値P以上となって、自車両Aと他車両Cとの車間距離Nが充分に確保されていることが場合には、現時点から一定時間が経過する間に上記他車両Cが移動すると想定される横移動距離Lが0に設定されることにより、上記他車両Cの一定時間経過後における推定位置C′に基づく割り込み判定が行われることなく、上記他車両Cの現在位置に基づいて該他車両Cが上記自車両の走行領域γ内に侵入する割り込みが発生したか否かを判定する通常の判定制御が実行されることになる。
【0032】
図4は、自車両Aの走行速度とその前方に位置する他車両Cの走行速度との速度差に応じて上記移動ゲインαを設定するためのグラフであり、上記速度差が一定値U未満の領域では、上記移動ゲインαが最大値である1000(ms)、つまり1秒に設定されるようになっている。また、上記速度差が一定値U以上の領域では、該速度差が増大するのに応じて上記移動ゲインαがリニアに減少し、割り込み判定の対象となる他車両Cの走行速度と自車両Aの走行速度との間に大きな速度差がある場合には、両者の走行速度が近い場合に比べて上記移動ゲインαが小さな値に設定されるようになっている。
【0033】
そして、上記速度差が所定値Wとなった時点で、上記移動ゲインαが0になるように設定される。このように速度差が所定値W以上となって、自車両Aの走行速度が他車両Cよりも顕著に速い場合、または自車両Aの走行速度が他車両Cよりも顕著に遅い場合の何れかの状態にあることが場合には、現時点から一定時間が経過する間に上記他車両Cが移動すると思われる横移動距離Lが0に設定されることにより、上記他車両Cの一定時間経過後における推定位置C′に基づく割り込み判定が行われず、上記他車両Cの現在位置に基づいて該他車両Cが上記自車両の走行領域γ内に侵入する割り込みが発生したか否かを判定する通常の判定制御が行われることになる。
【0034】
上記走行制御手段10は、ステアリングホイール等に設けられたアダプティブクルーズコントロールスイッチ2が操作されて追従走行制御を実行することが指示された場合に、運転者が車間距離の設定スイッチを操作することにより設定された目標車間距離、または車両の走行速度に応じて自動的に設定された目標車間距離と、上記前方検出手段1の出力に応じて自車両Aおよびその前方を走行する先行車両B間の実車間距離との差を測定し、該実車間距離と上記目標車間距離との差に対応した制御信号をエンジン制御ユニット4またはブレーキ制御ユニット5に制御信号を出力することにより、必要に応じて自車両Aを加速または減速して先行車両との車間距離を一定に維持し、もしくは設定車間時間を一定に維持する制御を実行するように構成されている。
【0035】
なお、上記走行制御手段10による追従走行の制御状態において、上記前方検出手段1の出力信号に応じて先行車両Bが存在していないことが確認された場合、もしくは先行車両Bを見失うロスト状態が生じたことが確認された場合には、上記追従走行の制御状態から定速走行の制御状態に移行し、予め設定された車速、もしくは運転者が車速設定スイッチを操作することにより設定された車速に自車両Aの走行速度を一致させる制御が上記走行制御手段10により実行されるようになっている。
【0036】
上記走行制御手段10による追従走行制御の実行状態で、上記割り込み判定手段9において自車両Aの前方に位置する他車両C等からなる移動物体が自車両Aの走行領域γ外から走行領域γ内に侵入する割り込みが発生したと判定された場合には、割り込み発生信号を上記表示装置7に出力し、該表示装置7において割り込みが発生したことを表示させる制御を実行するように構成されている。そして、上記追従走行制御の対象となる先行車両を該移動物体(他車両C)に切り替えることにより、上記自車両Aの走行領域γ内に割り込んできた上記移動物体を先行車両とし、当該移動物体と自車両Aとの車間距離等を一定に維持する追従走行制御が上記走行制御手段10において実行されるようになっている。
【0037】
また、上記走行制御手段10は、図外の定速走行スイッチが操作されて定速走行制御を実行することが指示された場合に、上記定速走行スイッチの操作時点における車速を目標車速とし、あるいは運転者が車速設定スイッチを操作することにより設定された車速を目標車速とし、該目標車速と、図外の車速センサにより実車速との差に対応した制御信号をエンジン制御ユニット4またはブレーキ制御ユニット5に制御信号を出力することにより、必要に応じて自車両Aを加速または減速して自車両Aの走行速度を目標車速に一致させる制御を実行するように構成されている。
【0038】
上記走行制御手段10による定速走行制御の実行状態で、上記割り込み判定手段9において自車両Aの前方に位置する他車両Cからなる移動物体による割り込みが発生したと判定された場合には、割り込み発生信号を上記表示装置7に出力するとともに、必要に応じて自車両Aを減速させる制御信号をエンジン制御ユニット4またはブレーキ制御ユニット5に制御信号を出力することにより、自車両の走行領域γ内に割り込みつつある上記他車両Cに自車両Aが接近しすぎるのを防止する制御が、上記走行制御手段10により実行されるようになっている。
【0039】
上記走行制御ユニット6により実行される追従走行の制御時における制御動作を、図5に示すフローチャートに基づいて説明する。上記制御動作がスタートすると、まず上記アダプティブクルーズコントロールスイッチ(ACC SW)2がON操作された追従走行制御の実行状態にあるか否かを判定し(ステップS1)、YESと判定された場合には、上記前方検出手段1の出力信号に応じて自車両Aの前方に位置する移動物体を上記捕捉手段8により捕捉する(ステップS2)。
【0040】
次いで、上記捕捉手段8により捕捉された移動物体の中に、自車両Aの走行領域γ外から走行領域γ内に侵入する可能性の高い接近車両が存在するか否かを判定する(ステップS3)。つまり上記捕捉手段8により捕捉された他車両C等からなる移動物体であって、その横移動方向が自車両の走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である移動物体からなる接近車両が存在しているかをステップS3で判定する。
【0041】
上記ステップS3でNOと判定され、自車両Aの前方に位置する移動物体の中に走行領域γ外から走行領域γ内に侵入する可能性の高い移動物体(接近車両)が存在していないことが確認された場合には、ステップS5に移行して自車両Aの前方に位置する移動物体の現在位置に基づき、該移動物体が上記自車両の走行領域γ内に侵入する割り込みが発生したか否かを判定する通常の判定制御を実行する。
【0042】
一方、上記ステップS3でYESと判定され、自車両Aの前方に位置する移動物体の中から走行領域γ外から走行領域γ内に侵入する可能の高い他車両Cからなる移動物体(接近車両)が存在していることが確認された場合には、現時点から一定時間経過後に上記他車両Cが位置していると思われる推定位置C′を算出する(ステップS4)。具体的には、図3または図4に示すグラフに基づいて設定された移動ゲインαと、上記他車両Cの横移動速度Vとを掛け合わせることにより、現時点から一定時間経過するまで間に上記他車両Cが移動すると想定される横移動距離L(=α×V)を算出し、上記捕捉手段8の出力信号に応じて特定された上記移動物体の現在位置の座標に、上記横移動距離Lを加算することにより、上記他車両Cの推定位置C′を求める。その後、上記推定位置C′に基づいて他車両Cが一定時間経過後に自車両の走行領域γ内に割り込んでくる状態にあるか否かを判定する(ステップS5)。
【0043】
そして、上記ステップS5においてYES、つまり自車両Aの前方に走行する移動物体の現在位置に基づいて該移動物体が上記自車両の走行領域γ外から走行領域γ内に侵入したと判定された場合、または上記移動物体が一定時間経過後における推定位置に基づいて該移動物体が自車両の走行領域γ内に割り込んでくる状態にあると判定された場合には、上記移動物体による割り込みが発生したことを示す割り込み発生信号を上記表示装置7に出力するとともに(ステップS6)、追従走行制御の対象となる先行車両Bを、自車両Aの走行領域γ内に新たに割り込んできた上記他車両Cからなる移動物体に切り替えた後(ステップS7)、当該移動物体と自車両Aとの車間距離等を一定に維持する追従走行制御を上記走行制御手段10において実行する(ステップS8)。
【0044】
一方、上記ステップS5においてそれぞれNOと判定された場合には、直接上記ステップS8に移行することにより、自車両Aの前方を走行する先行車両Bに追従し、あるいは自車両Aの走行速度を目標車速に維持する現在の走行制御状態を継続して実行した後、リターンする。
【0045】
上記のように自車両Aの前方を走行する先行車両B等を検出する前方検出手段1と、自車両Aの前方を走行する先行車両Bに追従する追従走行、または自車両Aの走行速度を目標車速に一致させる定速走行を実行するように自車両Aの走行状態を制御する走行制御手段10を備えた車両用走行制御装置において、上記前方検出手段1の検出信号に応じて自車両Aの前方に位置する移動物体等を捕捉する捕捉手段8と、該捕捉手段8により捕捉された移動物体が自車両Aの走行領域γ内に侵入する割り込みが発生したか否かを判定する割り込み判定手段9とを設け、上記捕捉手段8により、自車両Aの前方に位置する移動物体の横移動方向および横移動速度を判別し、捕捉手段8において捕捉された移動物体の横移動方向が自車両Aの走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である場合に、該横移動速度に応じて一定時間経過後における上記移動物体の位置を上記割り込み判定手段9により推定し、該移動物体の推定位置が自車両Aの走行領域γ内に位置する場合に上記移動物体が割り込でんくる状態にあると判定するように構成したため、運転者に違和感等を与えることなく、自車両Aの前方に位置する他車両Cによる割り込の発生を迅速かつ正確に判定することができ、当該判定結果に応じた車両の走行制御等を適正に実行できるという利点がある。
【0046】
すなわち、上記実施形態では、捕捉手段8において捕捉された移動物体の横移動方向が自車両Aの走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である場合に、上記割り込み判定手段9において設定された移動ゲインαと、上記移動物体の横移動速度Vとを掛け合わせることにより該移動物体の横移動距離Lを求め、該横移動距離Lと上記移動方向とに基づき、一定時間経過後における移動物体の位置C′を推定するように構成したため、自車両Aの前方に位置する他車両Bで自車両Aの走行領域γ外から走行領域γ内に侵入する可能性が高い他車両Cが存在する場合に、該他車両Cの推定位置C′に基づいて該他車両Cによる割り込みの発生を迅速かつ正確に予知することができ、当該割り込みが発生する状態にあることを表示装置7に事前に表示させる等により、運転者に適切な対応を採るように促すことができる。
【0047】
例えば、上記実施形態では、割り込み判定手段9において自車両Aの前方を走行する移動物体による割り込みが発生したと判定された場合に、該移動物体を先行車両Bとした追従走行制御を上記走行制御手段10において実行するように構成したため、上記移動物体に自車両Aが近付きすぎるという事態の発生を効果的に防止しつつ、先行車両Bを適正に変更した状態で追従走行制御を継続して実行できるという利点がある。
【0048】
また、上記実施形態では、捕捉手段8により捕捉された移動物体の横移動方向が自車両Aの走行領域γに近づく方向ではない場合、あるいはその横移動速度が設定値未満である場合に、上記移動物体の推定位置に基づく割り込み判定を上記割り込み判定手段9において行うことなく、該移動物体の現在位置に基づいて割り込み判定を行うように構成したため、自車両の走行領域γ内に割り込む可能性が低い移動物体を対象とした推定制御が実行されることに起因した誤判定の発生を防止できるという利点がある。
【0049】
しかも、上記移動物体が横移動方向または横移動速度等を変更して自車両Aの走行領域γ内に急接近してきた場合には、該移動物体の現在位置に基づいて自車両Aの走行領域γ内に他車両が侵入する割り込みが発生したか否か判定し、当該割り込みが発生したことが確認された時点で、表示装置7に表示させ、あるいは該移動物体を先行車両Bとした追従走行の制御状態へ移行を上記割り込み判定手段9において実行することができる。
【0050】
さらに、上記実施形態では、捕捉手段8において捕捉された他車両C等からなる移動物体の横移動方向が自車両Aの走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である場合に、図3に示すように、割り込み判定の対象となる他車両Cと自車両Aとの車間距離Nが増大するのに応じて上記移動ゲインαを小さな値に設定するように構成したため、自車両Aと上記他車両Cとの車間距離Nが大きい場合には、該車間距離Nが小さい場合に比べて上記移動ゲインαが小さな値に設定されることになる。したがって、自車両Aとその前方に位置する他車両Cとの車間距離Nが大きいために該他車両Cが自車両Aの走行領域γ内に割り込んできても、それ程顕著な影響がない状態にある場合に、該他車両Cの推定位置C′に基づいて該他車両Cによる割り込みが発生した判定される確率を効果的に低減し、これによって当該判定結果に基づいた不必要な制御が実行されるという事態の発生を効果的に防止できるという利点がある。
【0051】
また、図4に示すグラフに基づいて、自車両Aの走行速度とその前方に位置する他車両C等からなる移動物体の走行速度との速度差に応じて上記移動ゲインαを設定する等により、割り込み判定の対象となる移動物体と自車両Aとの速度差が増大するのに応じて上記移動ゲインαを小さな値に設定するように構成した場合においても、自車両Aの走行領域γ内に割り込む可能性が低い他車両Cを対象とした割り込み判定、あるいは割り込んできてもそれ程顕著な影響がない状態にある他車両Cの推定位置C′に基づいて割り込み判定が行われることによる不必要な制御の実行を効果的に防止することができる。
【0052】
例えば、自車両Aの前方に位置する他車両Cの走行速度が自車両Aよりも極端に遅い場合には、該他車両Cが自車両Aの前方に位置する走行領域γ内に割り込む前に自車両Aが上記他車両Cを追い抜く可能性が高いため、上記移動ゲインαを小さな値に設定することにより、上記他車両Cの推定位置C′に基づいた不必要な判定が行われるという事態の発生を効果的に防止できるという利点がある。
【0053】
逆に、自車両Aの前方に位置する他車両Cの走行速度が自車両よりも極端に早い場合には、仮に該他車両Cが自車両Aの走行領域γ内に割り込んできたとしても、上記他車両Cは、自車両Aの前方へ早期に走り去って自車両Aにそれ程大きな影響を与える可能性が低いと考えられるため、上記移動ゲインαを小さな値に設定することにより、上記他車両Cの推定位置C′に基づいた不必要な判定が行われるという事態の発生を効果的に防止できるという利点がある。
【0054】
なお、自車両Aの走行領域γ内に割り込む可能性が低い他車両を対象とした割り込み判定が行われることによる不必要な制御の実行を、より効果的に防止するため、図5に示すフローチャートのステップS3において、上記捕捉手段8により捕捉された移動物体であって、その横移動方向が自車両Aの走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である移動物体が存在していると判定された場合においても、その全ての一定時間経過後における位置を推定する必要はなく、その判定対象となる移動物体を必要なもののみに限定することが望ましい。
【0055】
例えば、図6に示すように、ステップS3においてYESと判定され、自車両Aの前方に位置する移動物体であって、その横移動方向が自車両の走行領域γ外から走行領域γ内に近づく方向であり、かつその横移動速度が設定値以上である接近車両が存在していることが確認された場合には、上記移動物体と自車両との車間距離Nが、予め設定された一定の値に設定された基準値、または車速等に対応して適宜の値に設定された基準値P以上あるか否かを判定する。(ステップS11)。
【0056】
上記ステップS11でYESと判定された場合には、上記移動物体の推定位置に基づく割り込み判定を行うことなく、直接、ステップS5に移行して上記移動物体の現在位置に基づいて該移動物体が上記自車両の走行領域γ内に侵入する割り込みが発生したか否かを判定する通常の判定制御を実行する。これにより、自車両とその前方に位置する移動物体との車間距離Nが大きいために該移動物体が自車両Aの走行領域γ内に割り込んできてもそれ程顕著な影響がない状態にあるにも拘わらず、該移動物体の推定位置に基づいて該移動物体による割り込みが発生したか否を判定するという不必要な判定制御が実行されることを効果的に防止することができる。
【0057】
これに対して上記ステップS11でNOと判定され、上記移動物体と自車両Aとの車間距離Nが基準値P未満あるであることが確認された場合には、上記移動物体の走行速度と自車両の速速度との速度差が、予め設定された一定の値に設定された基準値、または車速等に対応して適宜の値に設定された基準値U以上であるか否かを判定する(ステップS12)。
【0058】
上記ステップS12でYESと判定された場合には、上記移動物体の推定位置に基づく割り込み判定を行うことなく、直接、ステップS5に移行し、上記移動物体の現在位置に基づいて該移動物体による割り込みが発生したか否かを判定する通常の判定制御を実行する。これにより、上記移動物体と自車両Aとの速度差が大きいために、該移動物体が自車両Aの走行領域γ内に割り込んできてもそれ程顕著な影響がないか、あるいは該移動物体が自車両Aの走行領域γ内に割り込む可能性が極めて低いにも拘わらず、該移動物体の推定位置に基づいて該移動物体による割り込みが発生したか否を判定するという不必要な判定制御が行われるのを効果的に防止することができる。
【0059】
一方、上記ステップS12でNOと判定され、上記移動物体と自車両Aとの速度差が基準値U未満であることが確認された場合には、上記移動物体とは別の移動物体を対象とした割り込み判定の制御を既に実行中であるか否かを判定する(ステップS13)。該ステップS13でNOと判定されたされた場合には、ステップS4に移行して現時点から一定時間経過後に上記移動物体が位置していると思われる推定位置を求めた後、該推定位置に基づいて該移動物体が一定時間経過後に自車両の走行領域γ内に割り込んでくる状態にあるか否かを判定する(ステップS5)。
【0060】
そして、上記ステップS13でYESと判定され、図7に示すように、上記捕捉手段8により新たに捕捉された第2移動物体Eの前方に位置する第1移動物体Dを対象とした割り込み判定を既に実行している状態にあることが確認された場合には、当該第2移動物体Eと上記第1移動物体Dとの車間距離Mが予め設定された一定値X以下である否かを判定し(ステップS14)、NOと判定された場合には、上記ステップS4に移行して現時点から一定時間経過後に上記第2移動物体Eが位置していると思われる推定位置E′を求めた後、該推定位置E′に基づいて該第2移動物体Eが一定時間経過後に自車両Aの走行領域γ内に割り込んでくる状態にあるか否かを判定する(ステップS6)。
【0061】
これに対して上記ステップS14でYESと判定され、第1移動物体Dと上記第2移動物体Eがとの車間距離Mが予め設定された一定値X以下であることが確認された場合には、上記第2移動物体Eの推定位置E′に基づく割り込み判定を行うことなく、ステップS5に移行して上記第2移動物体Eの現在位置に基づいて該第2移動物体Eが上記自車両の走行領域γ内に侵入する割り込みが発生したか否かを判定する通常の判定制御を実行する。これにより、上記第2移動体Eとその前方に位置する第1移動物体Dとの車間距離Mが小さすぎることに起因して、該第1移動物体Dの直後に上記第2移動物体Eが割り込んでくる可能性が極めて低い状態にある場合には、該第2移動物体Eの推定位置E′に基づいて該第2移動物体Eによる割り込みが発生したか否を判定することなく、実際の位置に基づく判定制御が実行され、これによって上記第2移動体の推定位置に基づいた不必要な制御が実行されるのを効果的に防止することができる。
【0062】
また、上記ヨーレートセンサ3の出力信号等に応じて自車両が旋回状態にあると判定された場合に、上記移動物体の推定位置に基づく割り込み判定制御の実行を禁止するように構成してもよい。この構成によれば、自車両Aが旋回状態にあるために他車両の位置を正確に推定することが困難な状態で、上記移動物体の推定位置に基づく割り込み判定制御が実行されることを防止することができる。したがって、自車両Aの前方を走行する移動物体が自車両の走行領域γ内に割り込んでくる可能性が低いにも拘わらず、該移動物体による割り込みが発生した誤判定されることを効果的に防止できるという利点がある。
【符号の説明】
【0063】
1 前方検出手段
9 割り込み判定手段
10 走行制御手段
A 自車両
B 先行車両
C 他車両
D 第1移動物体
E 第2移動物体
【特許請求の範囲】
【請求項1】
自車両の前方を走行する先行車両等を検出する前方検出手段と、自車両の前方を走行する先行車両に追従する追従走行、または自車両の走行速度を目標車速に一致させる定速走行を行うように自車両の走行状態を制御する走行制御手段を備えた車両用走行制御装置であって、上記前方検出手段の検出信号に応じて自車両の前方に位置する移動物体等を捕捉する捕捉手段と、該捕捉手段により捕捉された移動物体が自車両の走行領域内に侵入する割り込みが発生したか否かを判定する割り込み判定手段とを有し、上記捕捉手段は、自車両の前方に位置する移動物体の横移動方向および横移動速度を判別する機能を有し、上記割り込み判定手段は、捕捉手段により捕捉された移動物体の横移動方向が自車両の走行領域外から走行領域内に近づく方向であり、かつその横移動速度が設定値以上である場合に、該横移動速度に応じて一定時間経過後における上記移動物体の位置を推定し、該移動物体の推定位置が自車両の走行領域内に位置する場合に上記移動物体が割り込んでくる状態にあると判定するように構成されたことを特徴とする車両走行制御装置。
【請求項2】
上記走行制御手段は、上記割り込み判定手段により自車両の前方を走行する移動物体による割り込みが発生したと判定された場合に、該移動物体を先行車両とした追従走行制御を実行するように構成されたことを特徴とする請求項1に記載の車両走行制御装置。
【請求項3】
上記割り込み判定手段は、上記捕捉手段により捕捉された移動物体の横移動方向が自車両の走行領域に近づく方向ではない場合、あるいはその横移動速度が設定値未満である場合に、上記移動物体の推定位置に基づく割り込み判定を行うことなく、該移動物体の現在位置に基づいて割り込み判定を行うように構成されたことを特徴とする請求項1または2に記載の車両走行制御装置。
【請求項4】
上記割り込み判定手段は、該割り込み判定手段において設定された移動ゲインαと、上記移動物体の横移動速度とを掛け合わせることにより求めた横移動距離および上記移動方向とに基づき、一定時間経過後における移動物体の位置を推定するように構成されたことを特徴とする請求項3に記載の車両走行制御装置。
【請求項5】
上記移動ゲインαは、割り込み判定の対象となる移動物体と自車両との車間距離が増大するのに応じて小さな値に設定されるよう構成されたことを特徴とする請求項4に記載の車両走行制御装置。
【請求項6】
上記移動ゲインαは、割り込み判定の対象となる移動物体と自車両との速度差が増大するのに応じて小さな値に設定されるように構成されたことを特徴とする請求項4または5に記載の車両走行制御装置。
【請求項7】
上記割り込み判定手段は、上記捕捉手段により新たに捕捉された第2移動物体の前方に位置する第1移動物体を対象とした割り込み判定を既に実行している状態にあることが確認された場合に、当該第1移動物体と上記第2移動物体がとの距離が予め設定された一定値以下である否かを判定し、一定値以下であることが確認された場合に、上記第2移動物体の推定位置に基づく割り込み判定を行うことなく、該第2移動物体の現在位置に基づいて該第2移動物体が上記自車両の走行領域内に侵入する割り込みが発生したか否かを判定するように構成されたことを特徴とする請求項1〜6のいずれか1項に記載の車両走行制御装置。
【請求項1】
自車両の前方を走行する先行車両等を検出する前方検出手段と、自車両の前方を走行する先行車両に追従する追従走行、または自車両の走行速度を目標車速に一致させる定速走行を行うように自車両の走行状態を制御する走行制御手段を備えた車両用走行制御装置であって、上記前方検出手段の検出信号に応じて自車両の前方に位置する移動物体等を捕捉する捕捉手段と、該捕捉手段により捕捉された移動物体が自車両の走行領域内に侵入する割り込みが発生したか否かを判定する割り込み判定手段とを有し、上記捕捉手段は、自車両の前方に位置する移動物体の横移動方向および横移動速度を判別する機能を有し、上記割り込み判定手段は、捕捉手段により捕捉された移動物体の横移動方向が自車両の走行領域外から走行領域内に近づく方向であり、かつその横移動速度が設定値以上である場合に、該横移動速度に応じて一定時間経過後における上記移動物体の位置を推定し、該移動物体の推定位置が自車両の走行領域内に位置する場合に上記移動物体が割り込んでくる状態にあると判定するように構成されたことを特徴とする車両走行制御装置。
【請求項2】
上記走行制御手段は、上記割り込み判定手段により自車両の前方を走行する移動物体による割り込みが発生したと判定された場合に、該移動物体を先行車両とした追従走行制御を実行するように構成されたことを特徴とする請求項1に記載の車両走行制御装置。
【請求項3】
上記割り込み判定手段は、上記捕捉手段により捕捉された移動物体の横移動方向が自車両の走行領域に近づく方向ではない場合、あるいはその横移動速度が設定値未満である場合に、上記移動物体の推定位置に基づく割り込み判定を行うことなく、該移動物体の現在位置に基づいて割り込み判定を行うように構成されたことを特徴とする請求項1または2に記載の車両走行制御装置。
【請求項4】
上記割り込み判定手段は、該割り込み判定手段において設定された移動ゲインαと、上記移動物体の横移動速度とを掛け合わせることにより求めた横移動距離および上記移動方向とに基づき、一定時間経過後における移動物体の位置を推定するように構成されたことを特徴とする請求項3に記載の車両走行制御装置。
【請求項5】
上記移動ゲインαは、割り込み判定の対象となる移動物体と自車両との車間距離が増大するのに応じて小さな値に設定されるよう構成されたことを特徴とする請求項4に記載の車両走行制御装置。
【請求項6】
上記移動ゲインαは、割り込み判定の対象となる移動物体と自車両との速度差が増大するのに応じて小さな値に設定されるように構成されたことを特徴とする請求項4または5に記載の車両走行制御装置。
【請求項7】
上記割り込み判定手段は、上記捕捉手段により新たに捕捉された第2移動物体の前方に位置する第1移動物体を対象とした割り込み判定を既に実行している状態にあることが確認された場合に、当該第1移動物体と上記第2移動物体がとの距離が予め設定された一定値以下である否かを判定し、一定値以下であることが確認された場合に、上記第2移動物体の推定位置に基づく割り込み判定を行うことなく、該第2移動物体の現在位置に基づいて該第2移動物体が上記自車両の走行領域内に侵入する割り込みが発生したか否かを判定するように構成されたことを特徴とする請求項1〜6のいずれか1項に記載の車両走行制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−43467(P2013−43467A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−180473(P2011−180473)
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月22日(2011.8.22)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
[ Back to top ]