
車両走行制御装置
【発明の詳細な説明】
[産業上の利用分野]
本発明は車両走行制御装置、特に先行車の走行状態に応じて自車両の車速を制御し、自動追従走行を行う車両走行制御装置に関する。
[従来の技術]
従来より、高速道路等において運転者の運転操作の低減等を目的とした自動走行制御装置が知られている。この自動走行制御装置においては、先行車がない場合には運転者が予め設定した設定車速で定速走行し、先行車がある場合には先行車と自車両との車間距離に応じて適宜自車両の車速を制御し、追従走行を行うものである。
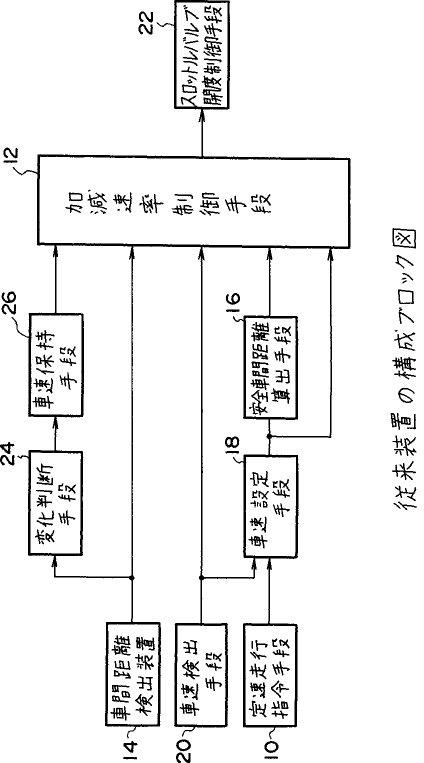
このような走行制御装置の一例として例えば実開昭59−182704号公報に開示された車両走行制御装置がある。この従来の車両走行制御装置においては、第9図のブロック図に示されるように、定速走行指令手段10の作動時であって、加減速率制御手段12が車間距離検出装置14の検出出力から車間距離が安全車間距離算出手段16にて算出された安車間距離を越えているときには自車両の車速を車速設定手段18の作動により車速検出手段20の検出出力に基づいて設定された車速に調整する加速率または減速率を算出し、また、車間距離が安全車間距離より短いときには自車両の車速を車間距離に応じた車速に調整する加速率または減速率を算出する。
そして、このようにして算出された加速率または減速率に応じてスロットルバルブ開度制御手段22を介して車速制御しているときに、変化判断手段24が車間距離検出装置14の出力からこの車間距離検出装置14の検出範囲内に先行車がいなくなったことを検出したときに車速保持手段26の駆動により車速を現在の車速に保持させるものである。
すなわち、この従来の車両走行制御装置においては、追従走行中に先行車がいなくなったからといって、単純に自車両を設定車速にすべく加速制御するのではなく、現在の車速に車両を保持するものである。
[発明が解決しようとする課題]
このように、従来の車両走行制御装置では、先行車がいなくなったとき、例えば登坂路の頂上付近で先行車を検出できなくなった場合、現在の車速を保持して定速走行を行うが、頂上付近で渋滞などにより先行車が減速または停車するような場合には、自車両が頂上付近にさしかかった際に急に減速または停車中の先行車を検出することとなる。
この場合、定速車速制御から、先行車との車間距離に応じた車速制御に切り換わるが、先行車との車間距離が短く、先行車と自車両の車速との相対速度が大きい(自車両の車速の方が大きい)場合には、制御すべき減速率も大きくなり、先行車に急激に接近する恐れがあり、快適な走行を行うことができないという問題があった。
本発明は、上記従来の車両走行制御装置の有する課題に鑑みなされたものであり、追従走行中に先行車が検出できなくなったときにも安全かつ快適に車両を走行させる車両走行制御装置を提供することにある。
[課題を解決するための手段]
上記目的を達成するために、先行車の走行状態に応じて自車両の車速を制御し先行車に自動追従させる車両走行制御装置において、少なくとも先行車両と自車との相対速度を含む先行車の走行状態を検出する検出手段と、検出された先行車の走行状態を記憶する記憶手段と、前記検出手段で先行車の走行状態を検出できない時に前記記憶手段に記憶された少なくとも直前の前記相対速度に基づいて、自車両と先行車両の状態を予測して自車の減速度合いを決定する予測手段と、この予測手段で決定された減速度合いに基づいて、自車両の車速を制御する制御手段と、を有することを特徴としている。
[作用]
本発明に係る車両走行制御装置はこのような構成を有しており、検出不能状態となる直前付近の先行車の走行状態は先行車の前方状況に基づいた制御結果が反映されている可能性が高く、従ってこれより自車両が走行すべき道路状況を予測して自車両の走行を制御するものである。
すなわち、検出手段により先行車の走行状態が検出されている間は通常の追従走行が行われるとともに、先行車の走行状態は記憶手段に格納される。そして、登坂路等により先行車が検出不能となったときには、制御手段が記憶手段に格納された走行状態、特に車間距離に応じて自車両の速度を決定することにより、検出不能の環境状態により合致した走行が可能となり、運転者の運転操作を著しく軽減することが可能となる。
[実施例]
以下、図面を用いながら本発明に係る車両走行制御装置の好適な実施例を説明する。
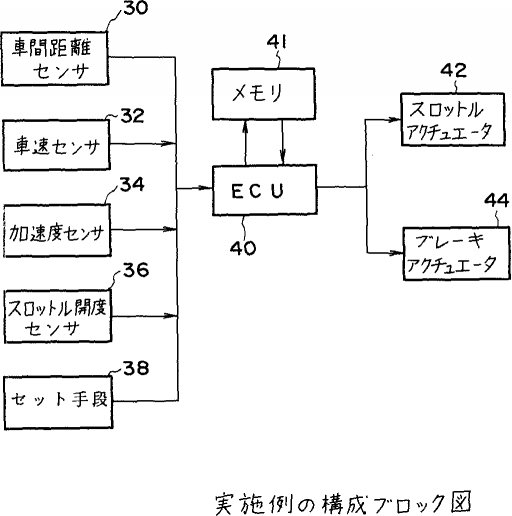
第1図は本実施例の構成ブロック図を示したものであり、先行車の走行状態を検出する検出手段として車間距離センサ30が自車両の所定位置、例えばバンパー近傍に設けられており、先行車と自車両との車間距離が逐次検出される。車間距離センサ30としては、例えばスキャン型レーザレーダ装置を用いることができる。
また、自車両の速度を検出する車速センサ32、自車両の加速度を検出する加速度センサ34により自車両の走行状態が検出される。
更に、自車両のスロットル開度を検出するスロットル開度センサ36が自車両の所定位置に設置され、後述するアクチュエータ制御量を算出する際のデータを提供する。また、車両走行制御装置を作動させるセット手段38が設けられており、これら各センサからの検出信号は自車両の走行を制御する制御手段としての電子制御装置ECU40に入力される。
ECU40は、各センサ及びセット手段38からの入力信号を処理する処理回路、各種演算を行う演算回路及びこの演算回路で計算した制御量をアクチュエータに供給する駆動回路を備えており、各センサからの検出情報をメモリ41に格納するとともに適宜このメモリにアクセスして格納情報を読み出して処理を行う。
本実施例においては、このECU40は以下の3つの制御モードを有している。すなわち、セット手段38を作動させることにより、(1)先行車がないときには運転者が予め設定した速度又は装置で予め設定された速度で定速走行させる定速走行制御モード(2)先行車があるときには先行車と自車両との車間距離に応じて車速を制御し、先行車に自動追従させる追従走行制御モード(3)登坂路等で先行車がある状態から先行車検出不能状態に変化した際にその検出不能状態における自車両の走行を制御する予測走行制御モード そして、これら3つの制御モードを適宜切換えてスロットルアクチュエータ42及びブレーキアクチュエータ44に制御信号を送り、走行を制御するのである。
ここで、ECU40が行う定速走行制御モード及び追従走行制御モードに関しては、従来とほぼ同様の制御が行われる。すなわち、車間距離センサ30により検出された先行車との車間距離が予め定められた安全車間距離より小さいときにはより車間距離を大きくするように減速し、また安全車間距離より大きい場合にはスロットルアクチュエータ42を駆動して加速し、先行車に追従して走行する。また、先行車との車間距離が車間距離センサ30の距離検出能以上の地点を先行車が走行している場合には、スロットルアクチュエータ42及びブレーキアクチュエータ44を駆動することにより、車速センサ32にて検出される車速が予め設定された設定速度に一致するように定速走行を行う。
このように、定速走行制御モード及び追従走行制御モードに関しては、本実施例のECU40は従来とほぼ同様の制御を行うが、本実施例において特徴的なことは、第3の走行制御モード、すなわち登坂路等において先行車が検出不能状態となったときに自車両の走行を制御する予測走行制御モードを備えたことである。
以下、この予測走行制御モードを詳細に説明する。
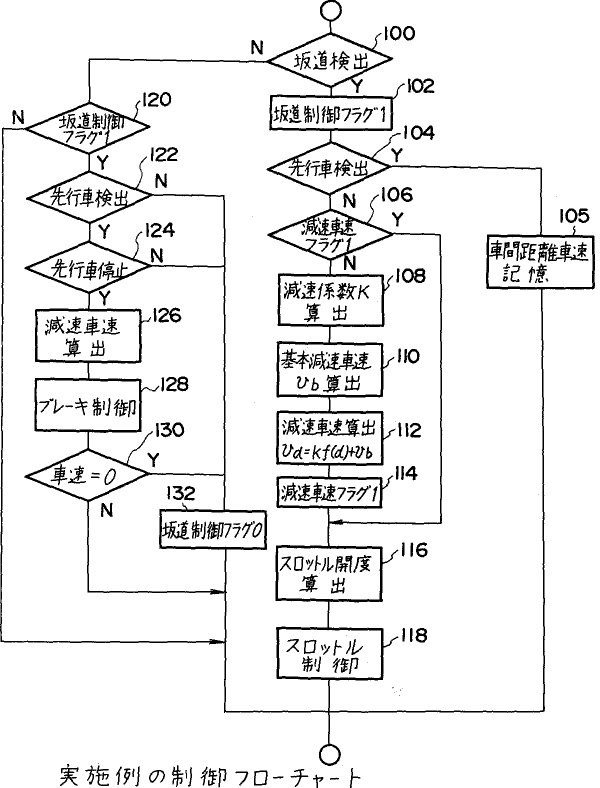
第2図は、この予測走行制御モードにおけるECU40の制御フローチャートを示したものである。まず、ステップ100にてこの予測走行制御モードにモードを切換えるための判断がなされる。すなわち、このステップ100にて現在自車両が予測制御を必要とする坂道を走行しているか否かが判定される。このように自車両が坂道を走行しているか否かは、車速センサ32及び加速度センサ34からの検出信号により判定することが可能である。
第3図はこの坂道検出の原理説明図を示す。自車両がこの勾配θの坂道で停止している場合には、図中模式的に振子で示した加速度センサの変位部はアの位置にある。そして、この勾配θの坂道を図中矢印方向にgsinθで加速走行中は、この振子型加速度センサに作用する慣性力及び重力により図中イの位置に変位する。
ところで、自車両がこのような勾配θの坂道ではなく、平坦路を同じ加速度gsinθで走行している場合には、振子型加速度センサに働く慣性力により更に変位した図中ウの位置にくる。
このように、勾配θの存在により本来平坦路においてはウの位置まで変位するはずの振子型加速度センサは、この勾配θの存在により図中イの位置しか変位せず、このイとウの変位差がそのまま勾配θに依存することとなる。
従って、車速センサ32で検出された車速の時間微分により算出される車輪加速度に対し、加速度センサの出力を種々の勾配に対してプロットすると、第3図(B)に示されるように、坂道の勾配θによって異なる切片を有する一次直線群が得られることとなる。
従って、車輪加速度及び加速度センサ出力を検出することにより、これらの一次直線群のうちから一の直線群を選択することができ、現在車両が平坦路(勾配θ=0゜)ではなく、有限の勾配を有する坂道を走行していることが検出される。
ステップ100にてYES、すなわち現在自車両が坂道を走行中であると判定された場合には、次のステップ102に移行し、坂道制御フラグに1を入力する。そして、次のステップ104に移行し、先行車が検出されているか否かが判定される。
先行車と自車両が共に登坂路を走行中は、自車両のバンパーに取り付けられた車間距離センサ30に先行車を検出することは可能であり、この場合はステップ104でYESと判定されステップ105に示されるように先行車との車間距離や相対速度がメモリ41に格納されるとともに追従走行制御モードによる追従走行が行われる。
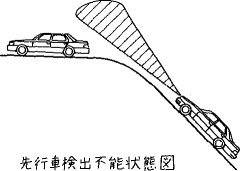
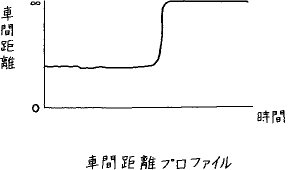
一方、第4図に示されるように、先行車が登坂路の頂上にさしかかり自車両がまだ登坂路を走行している場合には、先行車は自車両のレーザレーダ装置等の車間距離センサの検出範囲(図中斜線部分)からはずれ、検出不能状態となる。このことは第5図に示された車間距離プロファイルにより明らかになる。すなわち、先行車と自車両がともに登坂路を走行中は、ある有限の車間距離の値が検出されるが、第4図に示すような状況においては、車間距離が有限の値から突然無限大へと変化し先行車の検出が不可能となる。このようにして先行車の検出ができなくなった場合には、このステップ104にてNOと判定され、次のステップ106へ移行する。
ステップ106では、減速車速フラグが1であるか否かが判定される。この減速車速フラグは、後述するように自車両がこれから減速すべき車速が既に算出された場合には1となり、その他の場合には0となるフラグである。従って、イニシャル状態においては、減速車速フラグは0であり、このステップ106ではNOと判定され、ステップ108に移行する。
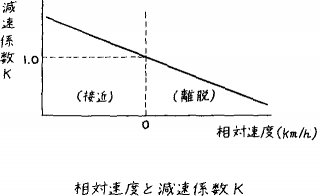
ステップ108からステップ112までのフローチャートは本実施例の特徴である予測制御を行うための自車両の車速を決定するフローチャートである。すなわち、まずステップ108にて先行車との車間距離の時間微分により算出される相対速度に対する減速係数Kが算出される。相対速度と減速係数Kとの関係を第7図に示す。横軸は相対速度であり、ほぼ中央付近に相対速度=0、すなわち先行車と自車両とがほぼ同一速度で走行している場合を示している。そして、この相対速度=0を中心にして、正方向は相対速度が増加して先行車が離脱する状況を表しており、また、負方向は相対速度が減少して、先行車が自車両に接近している状況を表している。
一方、縦軸は減速係数Kを表しており、相対速度0のときの減速係数Kが1.0となるように一次関数で設定されている。
この一次関数は次のことを意味している。すなわち、先行車が検出不能状態となる直前の相対速度が正方向の大きな値を有し先行車が自車両から離脱する状況にあった場合には、減速係数Kは1以下の小さな値となって大きい減速はせず、一方検出不能状態となる直前の相対速度が負方向の大きな値、すなわち先行車が急ブレーキ等を行って自車両に接近している状況においては、減速係数Kを1より大きな値として大なる減速を行う。
このように、検出不能状態となる直前の先行車との相対速度に応じて減速係数Kを定めることにより、自車両は検出不可能であるが先行車の運転者は見ているであろう前方の道路状況を予測して検出不能状態における減速の度合を決定することができる。
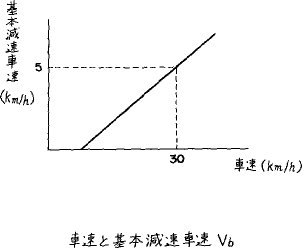
ステップ108にて減速係数Kが算出された後、次のステップ110に移行して、基本減速車速Vbが算出される。この基本減速車速Vbは自車両の車速に応じて一義的に定まる最少の減速車速を与えるものであり、第8図に示すような一次直線で与えられる。第8図は横軸に車速、縦軸に基本減速車速をとってプロットしたものであり、自車両の車速が所定の閾値車速となるまでは減速車速は0であり、所定の閾値車速を越えて大きくなるに従い、基本減速車速も大きな値をとるように設定される。
ステップ110で先行車が検出不能となる直前の車速に基づき基本減速車速が算出された後、ステップ112で減速車速Vdが算出される。この減速車速Vdは自車両がこれから減速すべき速度を与えるものであり、次式で与えられる。
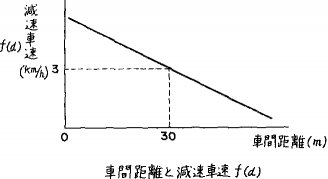
Vd=K・f(d)+Vb ここで、Kは前述のステップ100で算出された減速係数であり、Vbはステップ110で算出された基本減速車速である。またf(d)は先行車が検出不能となる直前の先行車と自車両との車間距離に基づいた制御を行うための変数であり、第6図に示されるような一次関数で定められる。第6図の横軸は車間距離を示し、縦軸はf(d)で示される減速車速を表しており、車間距離が小さいほど大きな減速を必要とするという現実の要請に合致した一次関係を想定している。
このように、減速車速Vdは、減速計数K、減速車速f(d)及び基本減速車速Vbから求められることとなるが、減速係数Kは先行車が検出不能状態となる直前の相対速度に基づいて定められる物理量であり、減速車速f(d)は先行車が検出不能状態となる直前の車間距離に応じて求められる物理量であり、基本減速車速Vbは先行車が検出不能状態となる直前の自車両の車速に応じて求められる物理量である。従って、減速車速Vdは先行車が検出不能状態となる直前の先行車の走行状態に応じて定まることとなる。
これら一連のステップ108〜112によりこれから減速すべき速度量、すなわち減速速度が算出された後、ステップ114にて減速車速フラグに1を入力する。そして、次のステップ116に移行して算出された減速車速Vd及びスロットル開度センサ36からの検出信号に基づいて減速車速Vdに設定すべくスロットル開度を算出し、ステップ118でスロットル制御を行う。
このように、自車両が坂道を走行中であり、かつ先行車が検出不能状態となったときには、減速車速を算出してスロットルを制御することにより、先行車が検出不能状態となる直前の走行状態に応じて予測制御が行われるが、自車両が登坂路を上りきり再び平坦路を走行する場合には、以下の制御ルーチンに移行する。
すなわち、平坦路を走行中はステップ100にてNOと判定されるため、ステップ120に移行する。このステップ120では、坂道制御フラグが1であるか否かが判定されるが、前述のステップ102にて坂道制御フラグには1が入力されたため、このステップではYESと判定され、先行車検出の有無が判定されるステップ122に移行する。登坂路を上りきり、先行車と自車両とが共に平坦路を再び走行している場合には、先行車は再び自車両の車間距離センサの検出範囲内に位置するため、YESと判定され、次のステップ124に移行する。
このステップ124では、検出された先行車が停止状態にあるか否かが判定される。登坂路の頂上付近で渋滞が発生していた場合や、何らかの障害がある場合には、先行車は登坂路を上りきった後、頂上付近で急ブレーキをかけ停止していることとなるが、このような場合、このステップ124でYESと判定されることとなる。そして、先行車が停止している場合には、次のステップ126で前述した追従走行制御モードでの減速車速の算出が行われる。すなわち、このステップ126では先行車との車間距離に応じた車速算出が行われるが、本実施例においては従来と異なり、先行車が検出不能状態にあるときでも、検出不能状態となる直前の先行車の走行状態に応じて予測制御されているため、このように先行車が頂上付近で停止している場合においてもそこに到達するまでに十分自車両の速度は減速されており、このステップ126で算出される減速車速も急峻な値となることはなく、次のステップ128で行われるブレーキ制御をも滑らかな操作が行われることとなる。
このブレーキ制御操作の結果、自車両も先行車と同様に停止した場合には、次のステップ130でYESと判定され、この予測走行制御モードが終了したことを意味するので、ステップ132にて坂道制御フラグを0に復帰させ、通常の走行制御モードに移る。
このように、本実施例においては、定速走行制御モード及び追従走行制御モードを併用して高速道路等を走行している際に登坂路において先行車が検出不能状態となった場合にも検出不能直前の走行状態を考慮して適当な制御を行うものであり、極めて安全性の高い自動走行を行うことが可能となる。
なお、本実施例においてはメモリ41に格納された先行車が検出不能状態となる直前の走行データに応じて自車両の車速を制御したが、それ以前の走行データも考慮して走行制御することも可能である。
[発明の効果]
以上説明したように、本発明に係る車両走行制御装置によれば、先行車を追従走行中に先行車が検出不能状態となった場合でも、検出不能状態直前の先行車の走行状態に応じて自車両を予測制御することにより、より安全かつより快適な自動走行が可能となる効果がある。
【図面の簡単な説明】
第1図は、本発明に係る車両走行制御装置の一実施例の構成ブロック図、
第2図は同実施例の制御フローチャート図、
第3図は同実施例における坂道検出の原理説明図、
第4図は同実施例における先行車検出不能状態図、
第5図は同実施例における車間距離プロファイルを示す図、
第6図は同実施例における車間距離と減速車速f(d)のグラフ図、
第7図は同実施例における相対速度と減速係数Kのグラフ図、
第8図は同実施例における車速と基本減速車速Vbのグラフ図、
第9図は従来の車両走行制御装置の構成ブロック図である。
30……車間距離センサ
32……車速センサ
34……加速度センサ
36……スロットル開度センサ
38……セット手段
40……ECU
41……メモリ
42……スロットルアクチュエータ
44……ブレーキアクチュエータ
[産業上の利用分野]
本発明は車両走行制御装置、特に先行車の走行状態に応じて自車両の車速を制御し、自動追従走行を行う車両走行制御装置に関する。
[従来の技術]
従来より、高速道路等において運転者の運転操作の低減等を目的とした自動走行制御装置が知られている。この自動走行制御装置においては、先行車がない場合には運転者が予め設定した設定車速で定速走行し、先行車がある場合には先行車と自車両との車間距離に応じて適宜自車両の車速を制御し、追従走行を行うものである。
このような走行制御装置の一例として例えば実開昭59−182704号公報に開示された車両走行制御装置がある。この従来の車両走行制御装置においては、第9図のブロック図に示されるように、定速走行指令手段10の作動時であって、加減速率制御手段12が車間距離検出装置14の検出出力から車間距離が安全車間距離算出手段16にて算出された安車間距離を越えているときには自車両の車速を車速設定手段18の作動により車速検出手段20の検出出力に基づいて設定された車速に調整する加速率または減速率を算出し、また、車間距離が安全車間距離より短いときには自車両の車速を車間距離に応じた車速に調整する加速率または減速率を算出する。
そして、このようにして算出された加速率または減速率に応じてスロットルバルブ開度制御手段22を介して車速制御しているときに、変化判断手段24が車間距離検出装置14の出力からこの車間距離検出装置14の検出範囲内に先行車がいなくなったことを検出したときに車速保持手段26の駆動により車速を現在の車速に保持させるものである。
すなわち、この従来の車両走行制御装置においては、追従走行中に先行車がいなくなったからといって、単純に自車両を設定車速にすべく加速制御するのではなく、現在の車速に車両を保持するものである。
[発明が解決しようとする課題]
このように、従来の車両走行制御装置では、先行車がいなくなったとき、例えば登坂路の頂上付近で先行車を検出できなくなった場合、現在の車速を保持して定速走行を行うが、頂上付近で渋滞などにより先行車が減速または停車するような場合には、自車両が頂上付近にさしかかった際に急に減速または停車中の先行車を検出することとなる。
この場合、定速車速制御から、先行車との車間距離に応じた車速制御に切り換わるが、先行車との車間距離が短く、先行車と自車両の車速との相対速度が大きい(自車両の車速の方が大きい)場合には、制御すべき減速率も大きくなり、先行車に急激に接近する恐れがあり、快適な走行を行うことができないという問題があった。
本発明は、上記従来の車両走行制御装置の有する課題に鑑みなされたものであり、追従走行中に先行車が検出できなくなったときにも安全かつ快適に車両を走行させる車両走行制御装置を提供することにある。
[課題を解決するための手段]
上記目的を達成するために、先行車の走行状態に応じて自車両の車速を制御し先行車に自動追従させる車両走行制御装置において、少なくとも先行車両と自車との相対速度を含む先行車の走行状態を検出する検出手段と、検出された先行車の走行状態を記憶する記憶手段と、前記検出手段で先行車の走行状態を検出できない時に前記記憶手段に記憶された少なくとも直前の前記相対速度に基づいて、自車両と先行車両の状態を予測して自車の減速度合いを決定する予測手段と、この予測手段で決定された減速度合いに基づいて、自車両の車速を制御する制御手段と、を有することを特徴としている。
[作用]
本発明に係る車両走行制御装置はこのような構成を有しており、検出不能状態となる直前付近の先行車の走行状態は先行車の前方状況に基づいた制御結果が反映されている可能性が高く、従ってこれより自車両が走行すべき道路状況を予測して自車両の走行を制御するものである。
すなわち、検出手段により先行車の走行状態が検出されている間は通常の追従走行が行われるとともに、先行車の走行状態は記憶手段に格納される。そして、登坂路等により先行車が検出不能となったときには、制御手段が記憶手段に格納された走行状態、特に車間距離に応じて自車両の速度を決定することにより、検出不能の環境状態により合致した走行が可能となり、運転者の運転操作を著しく軽減することが可能となる。
[実施例]
以下、図面を用いながら本発明に係る車両走行制御装置の好適な実施例を説明する。
第1図は本実施例の構成ブロック図を示したものであり、先行車の走行状態を検出する検出手段として車間距離センサ30が自車両の所定位置、例えばバンパー近傍に設けられており、先行車と自車両との車間距離が逐次検出される。車間距離センサ30としては、例えばスキャン型レーザレーダ装置を用いることができる。
また、自車両の速度を検出する車速センサ32、自車両の加速度を検出する加速度センサ34により自車両の走行状態が検出される。
更に、自車両のスロットル開度を検出するスロットル開度センサ36が自車両の所定位置に設置され、後述するアクチュエータ制御量を算出する際のデータを提供する。また、車両走行制御装置を作動させるセット手段38が設けられており、これら各センサからの検出信号は自車両の走行を制御する制御手段としての電子制御装置ECU40に入力される。
ECU40は、各センサ及びセット手段38からの入力信号を処理する処理回路、各種演算を行う演算回路及びこの演算回路で計算した制御量をアクチュエータに供給する駆動回路を備えており、各センサからの検出情報をメモリ41に格納するとともに適宜このメモリにアクセスして格納情報を読み出して処理を行う。
本実施例においては、このECU40は以下の3つの制御モードを有している。すなわち、セット手段38を作動させることにより、(1)先行車がないときには運転者が予め設定した速度又は装置で予め設定された速度で定速走行させる定速走行制御モード(2)先行車があるときには先行車と自車両との車間距離に応じて車速を制御し、先行車に自動追従させる追従走行制御モード(3)登坂路等で先行車がある状態から先行車検出不能状態に変化した際にその検出不能状態における自車両の走行を制御する予測走行制御モード そして、これら3つの制御モードを適宜切換えてスロットルアクチュエータ42及びブレーキアクチュエータ44に制御信号を送り、走行を制御するのである。
ここで、ECU40が行う定速走行制御モード及び追従走行制御モードに関しては、従来とほぼ同様の制御が行われる。すなわち、車間距離センサ30により検出された先行車との車間距離が予め定められた安全車間距離より小さいときにはより車間距離を大きくするように減速し、また安全車間距離より大きい場合にはスロットルアクチュエータ42を駆動して加速し、先行車に追従して走行する。また、先行車との車間距離が車間距離センサ30の距離検出能以上の地点を先行車が走行している場合には、スロットルアクチュエータ42及びブレーキアクチュエータ44を駆動することにより、車速センサ32にて検出される車速が予め設定された設定速度に一致するように定速走行を行う。
このように、定速走行制御モード及び追従走行制御モードに関しては、本実施例のECU40は従来とほぼ同様の制御を行うが、本実施例において特徴的なことは、第3の走行制御モード、すなわち登坂路等において先行車が検出不能状態となったときに自車両の走行を制御する予測走行制御モードを備えたことである。
以下、この予測走行制御モードを詳細に説明する。
第2図は、この予測走行制御モードにおけるECU40の制御フローチャートを示したものである。まず、ステップ100にてこの予測走行制御モードにモードを切換えるための判断がなされる。すなわち、このステップ100にて現在自車両が予測制御を必要とする坂道を走行しているか否かが判定される。このように自車両が坂道を走行しているか否かは、車速センサ32及び加速度センサ34からの検出信号により判定することが可能である。
第3図はこの坂道検出の原理説明図を示す。自車両がこの勾配θの坂道で停止している場合には、図中模式的に振子で示した加速度センサの変位部はアの位置にある。そして、この勾配θの坂道を図中矢印方向にgsinθで加速走行中は、この振子型加速度センサに作用する慣性力及び重力により図中イの位置に変位する。
ところで、自車両がこのような勾配θの坂道ではなく、平坦路を同じ加速度gsinθで走行している場合には、振子型加速度センサに働く慣性力により更に変位した図中ウの位置にくる。
このように、勾配θの存在により本来平坦路においてはウの位置まで変位するはずの振子型加速度センサは、この勾配θの存在により図中イの位置しか変位せず、このイとウの変位差がそのまま勾配θに依存することとなる。
従って、車速センサ32で検出された車速の時間微分により算出される車輪加速度に対し、加速度センサの出力を種々の勾配に対してプロットすると、第3図(B)に示されるように、坂道の勾配θによって異なる切片を有する一次直線群が得られることとなる。
従って、車輪加速度及び加速度センサ出力を検出することにより、これらの一次直線群のうちから一の直線群を選択することができ、現在車両が平坦路(勾配θ=0゜)ではなく、有限の勾配を有する坂道を走行していることが検出される。
ステップ100にてYES、すなわち現在自車両が坂道を走行中であると判定された場合には、次のステップ102に移行し、坂道制御フラグに1を入力する。そして、次のステップ104に移行し、先行車が検出されているか否かが判定される。
先行車と自車両が共に登坂路を走行中は、自車両のバンパーに取り付けられた車間距離センサ30に先行車を検出することは可能であり、この場合はステップ104でYESと判定されステップ105に示されるように先行車との車間距離や相対速度がメモリ41に格納されるとともに追従走行制御モードによる追従走行が行われる。
一方、第4図に示されるように、先行車が登坂路の頂上にさしかかり自車両がまだ登坂路を走行している場合には、先行車は自車両のレーザレーダ装置等の車間距離センサの検出範囲(図中斜線部分)からはずれ、検出不能状態となる。このことは第5図に示された車間距離プロファイルにより明らかになる。すなわち、先行車と自車両がともに登坂路を走行中は、ある有限の車間距離の値が検出されるが、第4図に示すような状況においては、車間距離が有限の値から突然無限大へと変化し先行車の検出が不可能となる。このようにして先行車の検出ができなくなった場合には、このステップ104にてNOと判定され、次のステップ106へ移行する。
ステップ106では、減速車速フラグが1であるか否かが判定される。この減速車速フラグは、後述するように自車両がこれから減速すべき車速が既に算出された場合には1となり、その他の場合には0となるフラグである。従って、イニシャル状態においては、減速車速フラグは0であり、このステップ106ではNOと判定され、ステップ108に移行する。
ステップ108からステップ112までのフローチャートは本実施例の特徴である予測制御を行うための自車両の車速を決定するフローチャートである。すなわち、まずステップ108にて先行車との車間距離の時間微分により算出される相対速度に対する減速係数Kが算出される。相対速度と減速係数Kとの関係を第7図に示す。横軸は相対速度であり、ほぼ中央付近に相対速度=0、すなわち先行車と自車両とがほぼ同一速度で走行している場合を示している。そして、この相対速度=0を中心にして、正方向は相対速度が増加して先行車が離脱する状況を表しており、また、負方向は相対速度が減少して、先行車が自車両に接近している状況を表している。
一方、縦軸は減速係数Kを表しており、相対速度0のときの減速係数Kが1.0となるように一次関数で設定されている。
この一次関数は次のことを意味している。すなわち、先行車が検出不能状態となる直前の相対速度が正方向の大きな値を有し先行車が自車両から離脱する状況にあった場合には、減速係数Kは1以下の小さな値となって大きい減速はせず、一方検出不能状態となる直前の相対速度が負方向の大きな値、すなわち先行車が急ブレーキ等を行って自車両に接近している状況においては、減速係数Kを1より大きな値として大なる減速を行う。
このように、検出不能状態となる直前の先行車との相対速度に応じて減速係数Kを定めることにより、自車両は検出不可能であるが先行車の運転者は見ているであろう前方の道路状況を予測して検出不能状態における減速の度合を決定することができる。
ステップ108にて減速係数Kが算出された後、次のステップ110に移行して、基本減速車速Vbが算出される。この基本減速車速Vbは自車両の車速に応じて一義的に定まる最少の減速車速を与えるものであり、第8図に示すような一次直線で与えられる。第8図は横軸に車速、縦軸に基本減速車速をとってプロットしたものであり、自車両の車速が所定の閾値車速となるまでは減速車速は0であり、所定の閾値車速を越えて大きくなるに従い、基本減速車速も大きな値をとるように設定される。
ステップ110で先行車が検出不能となる直前の車速に基づき基本減速車速が算出された後、ステップ112で減速車速Vdが算出される。この減速車速Vdは自車両がこれから減速すべき速度を与えるものであり、次式で与えられる。
Vd=K・f(d)+Vb ここで、Kは前述のステップ100で算出された減速係数であり、Vbはステップ110で算出された基本減速車速である。またf(d)は先行車が検出不能となる直前の先行車と自車両との車間距離に基づいた制御を行うための変数であり、第6図に示されるような一次関数で定められる。第6図の横軸は車間距離を示し、縦軸はf(d)で示される減速車速を表しており、車間距離が小さいほど大きな減速を必要とするという現実の要請に合致した一次関係を想定している。
このように、減速車速Vdは、減速計数K、減速車速f(d)及び基本減速車速Vbから求められることとなるが、減速係数Kは先行車が検出不能状態となる直前の相対速度に基づいて定められる物理量であり、減速車速f(d)は先行車が検出不能状態となる直前の車間距離に応じて求められる物理量であり、基本減速車速Vbは先行車が検出不能状態となる直前の自車両の車速に応じて求められる物理量である。従って、減速車速Vdは先行車が検出不能状態となる直前の先行車の走行状態に応じて定まることとなる。
これら一連のステップ108〜112によりこれから減速すべき速度量、すなわち減速速度が算出された後、ステップ114にて減速車速フラグに1を入力する。そして、次のステップ116に移行して算出された減速車速Vd及びスロットル開度センサ36からの検出信号に基づいて減速車速Vdに設定すべくスロットル開度を算出し、ステップ118でスロットル制御を行う。
このように、自車両が坂道を走行中であり、かつ先行車が検出不能状態となったときには、減速車速を算出してスロットルを制御することにより、先行車が検出不能状態となる直前の走行状態に応じて予測制御が行われるが、自車両が登坂路を上りきり再び平坦路を走行する場合には、以下の制御ルーチンに移行する。
すなわち、平坦路を走行中はステップ100にてNOと判定されるため、ステップ120に移行する。このステップ120では、坂道制御フラグが1であるか否かが判定されるが、前述のステップ102にて坂道制御フラグには1が入力されたため、このステップではYESと判定され、先行車検出の有無が判定されるステップ122に移行する。登坂路を上りきり、先行車と自車両とが共に平坦路を再び走行している場合には、先行車は再び自車両の車間距離センサの検出範囲内に位置するため、YESと判定され、次のステップ124に移行する。
このステップ124では、検出された先行車が停止状態にあるか否かが判定される。登坂路の頂上付近で渋滞が発生していた場合や、何らかの障害がある場合には、先行車は登坂路を上りきった後、頂上付近で急ブレーキをかけ停止していることとなるが、このような場合、このステップ124でYESと判定されることとなる。そして、先行車が停止している場合には、次のステップ126で前述した追従走行制御モードでの減速車速の算出が行われる。すなわち、このステップ126では先行車との車間距離に応じた車速算出が行われるが、本実施例においては従来と異なり、先行車が検出不能状態にあるときでも、検出不能状態となる直前の先行車の走行状態に応じて予測制御されているため、このように先行車が頂上付近で停止している場合においてもそこに到達するまでに十分自車両の速度は減速されており、このステップ126で算出される減速車速も急峻な値となることはなく、次のステップ128で行われるブレーキ制御をも滑らかな操作が行われることとなる。
このブレーキ制御操作の結果、自車両も先行車と同様に停止した場合には、次のステップ130でYESと判定され、この予測走行制御モードが終了したことを意味するので、ステップ132にて坂道制御フラグを0に復帰させ、通常の走行制御モードに移る。
このように、本実施例においては、定速走行制御モード及び追従走行制御モードを併用して高速道路等を走行している際に登坂路において先行車が検出不能状態となった場合にも検出不能直前の走行状態を考慮して適当な制御を行うものであり、極めて安全性の高い自動走行を行うことが可能となる。
なお、本実施例においてはメモリ41に格納された先行車が検出不能状態となる直前の走行データに応じて自車両の車速を制御したが、それ以前の走行データも考慮して走行制御することも可能である。
[発明の効果]
以上説明したように、本発明に係る車両走行制御装置によれば、先行車を追従走行中に先行車が検出不能状態となった場合でも、検出不能状態直前の先行車の走行状態に応じて自車両を予測制御することにより、より安全かつより快適な自動走行が可能となる効果がある。
【図面の簡単な説明】
第1図は、本発明に係る車両走行制御装置の一実施例の構成ブロック図、
第2図は同実施例の制御フローチャート図、
第3図は同実施例における坂道検出の原理説明図、
第4図は同実施例における先行車検出不能状態図、
第5図は同実施例における車間距離プロファイルを示す図、
第6図は同実施例における車間距離と減速車速f(d)のグラフ図、
第7図は同実施例における相対速度と減速係数Kのグラフ図、
第8図は同実施例における車速と基本減速車速Vbのグラフ図、
第9図は従来の車両走行制御装置の構成ブロック図である。
30……車間距離センサ
32……車速センサ
34……加速度センサ
36……スロットル開度センサ
38……セット手段
40……ECU
41……メモリ
42……スロットルアクチュエータ
44……ブレーキアクチュエータ
【特許請求の範囲】
【請求項1】先行車の走行状態に応じて自車両の車速を制御し先行車に自動追従させる車両走行制御装置において、少なくとも先行車両と自車との相対速度を含む先行車の走行状態を検出する検出手段と、検出された先行車の走行状態を記憶する記憶手段と、前記検出手段で先行車の走行状態を検出できない時に前記記憶手段に記憶された少なくとも直前に前記相対速度に基づいて、自車両と先行車両の状態を予測して自車の減速度合いを決定する予測手段と、この予測手段で決定された減速度合いに基づいて、自車両の車速を制御する制御手段と、を有することを特徴とする車両走行制御装置。
【請求項1】先行車の走行状態に応じて自車両の車速を制御し先行車に自動追従させる車両走行制御装置において、少なくとも先行車両と自車との相対速度を含む先行車の走行状態を検出する検出手段と、検出された先行車の走行状態を記憶する記憶手段と、前記検出手段で先行車の走行状態を検出できない時に前記記憶手段に記憶された少なくとも直前に前記相対速度に基づいて、自車両と先行車両の状態を予測して自車の減速度合いを決定する予測手段と、この予測手段で決定された減速度合いに基づいて、自車両の車速を制御する制御手段と、を有することを特徴とする車両走行制御装置。
【第1図】


【第2図】
【第3図】

【第4図】
【第5図】
【第6図】
【第7図】
【第8図】
【第9図】
【第2図】
【第3図】
【第4図】
【第5図】
【第6図】
【第7図】
【第8図】
【第9図】
【特許番号】特許第3118818号(P3118818)
【登録日】平成12年10月13日(2000.10.13)
【発行日】平成12年12月18日(2000.12.18)
【国際特許分類】
【出願番号】特願平2−220581
【出願日】平成2年8月21日(1990.8.21)
【公開番号】特開平4−102200
【公開日】平成4年4月3日(1992.4.3)
【審査請求日】平成8年2月21日(1996.2.21)
【出願人】(999999999)トヨタ自動車株式会社
【参考文献】
【文献】特開 平1−114550(JP,A)
【文献】特開 昭58−43009(JP,A)
【登録日】平成12年10月13日(2000.10.13)
【発行日】平成12年12月18日(2000.12.18)
【国際特許分類】
【出願日】平成2年8月21日(1990.8.21)
【公開番号】特開平4−102200
【公開日】平成4年4月3日(1992.4.3)
【審査請求日】平成8年2月21日(1996.2.21)
【出願人】(999999999)トヨタ自動車株式会社
【参考文献】
【文献】特開 平1−114550(JP,A)
【文献】特開 昭58−43009(JP,A)
[ Back to top ]