
車両走行危険度評価システム
【課題】
道路の曲路を走行するとき、車両の重心位置に作用する遠心力の大きさと重心位置情報による車両の転倒危険性の評価を行い、常に走行予定経路に沿って現在走行している位置より先行きの道路事情に応じた危険度評価を予め前もって運転者に提示する。
【解決手段】
システムのCPU111は、現在位置から目的地までの走行予定経路を、付与された探索条件の下で道路情報に基づいて設定する。CPU111は、車両が設定された危険度評価位置に到達した際に、走行予定経路上であって、当該危険度評価位置よりも先行き方向に離間した危険度評価対象区間に対して、該危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、重心位置関連情報と、危険度評価位置での車速に基づき、車両の危険度を評価する。
道路の曲路を走行するとき、車両の重心位置に作用する遠心力の大きさと重心位置情報による車両の転倒危険性の評価を行い、常に走行予定経路に沿って現在走行している位置より先行きの道路事情に応じた危険度評価を予め前もって運転者に提示する。
【解決手段】
システムのCPU111は、現在位置から目的地までの走行予定経路を、付与された探索条件の下で道路情報に基づいて設定する。CPU111は、車両が設定された危険度評価位置に到達した際に、走行予定経路上であって、当該危険度評価位置よりも先行き方向に離間した危険度評価対象区間に対して、該危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、重心位置関連情報と、危険度評価位置での車速に基づき、車両の危険度を評価する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行予定経路上の危険度評価位置で車速を取得し、前記危険度評価位置よりも先行き方向に位置する危険度評価対象区間において前記車速で走行した場合の車両の危険度を評価し、その評価結果を運転者に提示する車両走行危険度評価システムに関する。
【背景技術】
【0002】
近年、車両、特に貨物自動車が走行中に横転して大事故を起こすケースがしばしば発生している。
積荷の位置及び重量の関係で、貨物自動車或いは貨物自動車の牽引車両(トラクタ)が牽引する荷台車(トレーラ)の重心が高く、しかも重心位置が左右の車輪列ラインのいずれかの方向に偏り過ぎていると低速走行時でも遠心力の作用によって曲路で貨物自動車の車両全体或いは荷台車が傾き、横転する可能性が高くなる。
【0003】
事故防止の上で貨物自動車或いは貨物自動車が牽引する荷台車の重心位置の高さや偏りを測定し、走行中の車両の傾斜、速度に基づいて危険度を評価・判定し、運転者に警報することは極めて重要である。
【0004】
特許文献1には、車両の荷台を支持する荷重センサにより、荷台の自重と該荷台に積載される荷物重量に対する荷重センサの重量測定値から荷台としての重心位置を算出して車両走行時の危険度を評価・判定することが開示されている。
【0005】
又、特許文献2の荷重検出装置も公知である。前記荷重検出装置は、傾動台の一端が回動自在に支持されるとともに前記傾動台の他端が上下可能に支持する上下動機構に連結されている。前記傾動台上には複数の荷重計(荷重センサ)に支持された載荷盤が設けられている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−97072号公報
【特許文献2】特開昭57−189022号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1では、車両の傾斜による転倒の危険性を評価するには、車両全体の重心位置を検出することによって可能になる。しかし、特許文献1では、曲路を走行する時の危険度を評価する構成については開示がない。
【0008】
特許文献2では、荷重検出装置を、車両の外部に設けて、該荷重検出装置に装備された荷重センサによる重量測定値を求めても、車両へ伝達する手段がないと、前記車両が走行中に重心位置情報を利用して走行状態における危険度評価はできない問題がある。なお、特許文献2は、この点については開示及び示唆はされていない。
【0009】
本発明の目的は、車両が道路の曲路を走行するとき、車両の重心位置に作用する遠心力の大きさと重心位置情報による車両の転倒危険性の評価を行うことができ、常に走行予定経路に沿って現在走行している位置より先行きの道路事情に応じた危険度評価を予め前もって運転者に提示することができる車両走行危険度評価システムを提供することにある。
【課題を解決するための手段】
【0010】
上記問題点を解決するために、請求項1の発明は、道路情報を記憶する道路情報記憶手段と、車両の現在位置を取得する現在位置取得手段と、前記現在位置から目的地までの走行予定経路を、付与された探索条件の下で前記道路情報に基づいて設定する走行予定路設定手段と、前記車両の重心位置関連情報を取得する情報入力手段と、前記車両の車速を取得する車速取得手段と、前記走行予定経路上において、前記現在位置から先行き方向に位置する危険度評価位置を設定する危険度評価位置設定手段と、前記車両が前記設定された危険度評価位置に到達した際に、前記走行予定経路上であって、当該危険度評価位置よりも先行き方向に離間した危険度評価対象区間に対して、該危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、前記重心位置関連情報と、前記危険度評価位置での車速に基づき、前記車両の危険度を評価する危険度評価手段と、前記危険度評価手段の評価結果を提示する提示手段を備えたことを特徴とする車両走行危険度評価システムを要旨としている。
【0011】
請求項2の発明は、請求項1において、前記危険度評価手段は、前記車両が前記設定された危険度評価位置に到達した際の車速が速くなるほど、或いは、前記危険度評価位置に到達した際の車速と、前記重心位置関連情報から得られる前記車両の運動量が大きいほど、前記危険度評価位置からの離間距離を長くした危険度評価対象区間に対して危険度を評価することを特徴とする。
【0012】
請求項3の発明は、請求項1又は請求項2において、前記危険度評価位置設定手段は、前記危険度評価位置を先行き方向に複数設定し、前記危険度評価手段は、順次前記危険度評価位置に車両が達する毎に、各危険度評価位置と所定距離離間した前記危険度評価対象区間における前記車両の危険度の評価を行うことを特徴とする。
【0013】
請求項4の発明は、請求項3において、前記危険度評価手段は、前記危険度評価位置に前記車両が達する度に、前記車両の危険度の評価が行われた前回の危険度評価対象区間と、一部が重なる新たな危険度評価対象区間において、前記車両の危険度を評価することを特徴とする。
【0014】
請求項5の発明は、請求項1乃至請求項4のうちいずれか1項において、前記危険度評価手段は、前記危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、前記重心位置関連情報と、前記危険度評価位置での車速に基づいた前記車両に作用する遠心力に基づいて前記車両の安全限界速度を算出し、前記提示手段は、前記安全限界速度を提示することを特徴とする。
【0015】
請求項6の発明は、請求項5において、前記提示手段は、前記危険度評価位置の車速が前記安全限界速度を超えている場合、警報情報を提示することを特徴とする。
なお、本明細書において、車両とは、例えば、乗用車、貨物自動車等を含み、貨物自動車では、駆動車が荷台と一体となったいわゆるトラック(タンクローリ車を含む)、駆動車(トラクタ)と前記駆動車に牽引された荷台車(トレーラ:セミトレーラ、フルトレーラを含む)、前記荷台車単体、駆動車(トラクタ)単体等を含む趣旨である。又、車両の重量とは、当該車両のみならず車両が積載する物(積載物)の重量を含む趣旨である。
【発明の効果】
【0016】
本発明によれば、車両が道路の曲路を走行するとき、車両の重心位置に作用する遠心力の大きさと重心位置情報による車両の転倒危険性の評価を行うことができ、常に走行予定経路に沿って現在走行している位置より先行きの道路事情に応じた危険度評価、警報と安全限界速度を予め前もって運転者に提示することができる。
【図面の簡単な説明】
【0017】
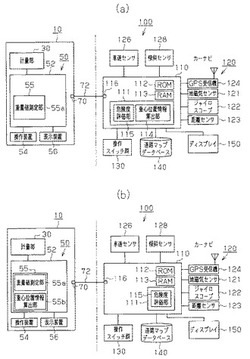
【図1】(a)は、本発明を具体化した第1実施形態の計量部と車両走行危険度評価システムのブロック図、(b)は、他の実施形態の計量部と車両走行危険度評価システムのブロック図。
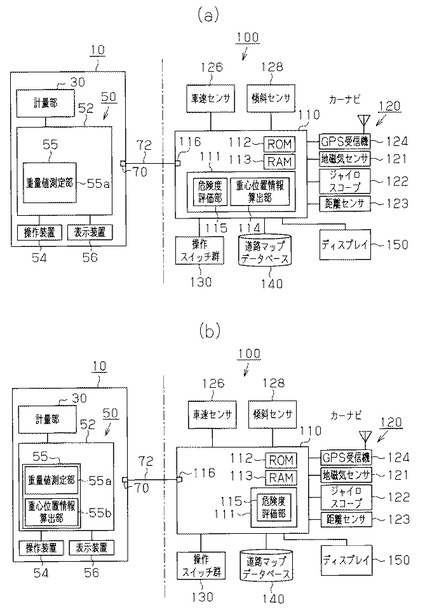
【図2】(a)は計量台の側面図、(b)は計量台の平面図、(c)は傾斜ブロックの説明図。
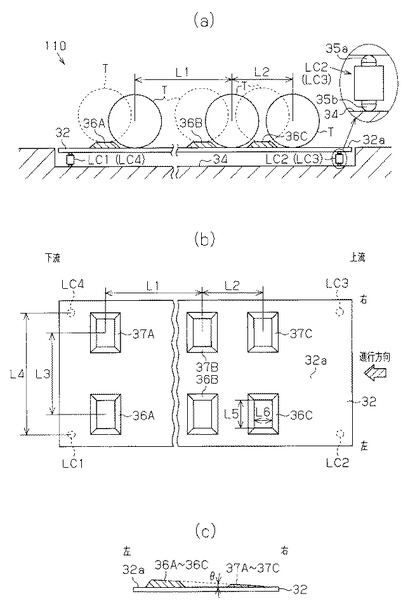
【図3】計量台の使用の説明図。
【図4】計量台の説明図。
【図5】計量台の傾斜ブロックの説明図。
【図6】重心位置の説明図。
【図7】重心位置の説明図。
【図8】重量値測定装置50の電気ブロック図。
【図9】重量位置関連情報の生成フローチャート。
【図10】(a)は、第1実施形態の走行予定経路の設定処理が行われた場合の例を示すフローチャート、(b)は、危険度評価のフローチャート。
【図11】(a)は、走行予定経路上の現在位置、危険度評価位置、先行き区間、危険度評価対象区間の説明図、(b)は好ましくない危険度評価対象区間の設定の場合の説明図。
【図12】車両が左カーブの曲路を走行する場合の重心に働く遠心力の説明図。
【図13】第2実施形態の重心高さの算出のフローチャート。
【図14】第2実施形態の走行予定経路の設定処理が行われた場合の例を示すフローチャート。
【図15】(a)は荷台車が計量台上で水平姿勢となった場合の説明図、(b)は、荷台車が荷台車が傾斜ブロックに載った場合の説明図。
【図16】駆動車(トラクタ)と荷台車(トレーラ)が計量台に載った場合の説明図。
【発明を実施するための形態】
【0018】
(第1実施形態)
以下、本発明を具体化した第1実施形態の車両走行危険度評価システム100を、図1(a)、図2〜図6、図8〜図10を参照して説明する。
【0019】
図1(a)には、車両の重量を計量する地上測定部10と、車両走行危険度評価システム100が図示されている。
(地上測定部10)
地上測定部10は、地表面上に設置されており、計量部30と、重量値測定装置50と、車両走行危険度評価システム100に対して、各種情報を通信で送信する情報出力手段70とを備えている。
【0020】
(計量部30)
計量部30を図2〜5を参照して説明する。
計量部30を構成する計量台32は、図2に示すように、地表の基礎面34(すなわち、地表面)に対して第1荷重センサLC1〜第4荷重センサLC4を介して支持されている。計量台32は、車両が載ることのできる平面視したとき四角形の板状部材で構成されている。基礎面34は、通常、地面に敷設されたコンクリートにより形成されている。
【0021】
第1荷重センサLC1〜第4荷重センサLC4は、例えばストレインゲージ式で圧縮型起歪部を持つロードセルからなる。第1荷重センサLC1〜第4荷重センサLC4は、図2(a)、(b)、図3に示すように前記計量台32の4隅に配置されている。すなわち、第1荷重センサLC1は、計量台32における車両前進走行経路下流側の左角部を下側から支持することができるように配置されている。第2荷重センサLC2は、計量台32における車両前進走行経路上流側の左角部を下側から支持することができるように配置されている。第3荷重センサLC3は、計量台32における車両前進走行経路上流側の右角部を下側から支持することができるように配置されている。第4荷重センサLC4は、計量台32における車両前進走行経路下流側の右角部を下側から支持することができるように配置されている。
【0022】
第1荷重センサLC1〜第4荷重センサLC4は、上方に位置する計量台32からの荷重を受ける荷重受け部35a、及び基礎面34からの反力荷重を受ける反力荷重受け部35bを有する。前記荷重受け部35a及び反力荷重受け部35bは、球面形状をなす凸部に構成されている。
【0023】
なお、図2(a)では、図示は省略されているが、計量台32、及び基礎面34には、前記荷重受け部35a及び反力荷重受け部35bの各凸部に当接するように設けられた荷重受け金具が設けられている。すなわち、各荷重受け金具の荷重受け面と第1荷重センサLC1〜第4荷重センサLC4の荷重受け部35a、及び反力荷重受け部35bの各凸部とは水平方向に可動自由に接触している。第1荷重センサLC1〜第4荷重センサLC4の動きは計量台32に拘束されないようにして計量台32の撓みによる横向き方向(水平方向)の荷重の影響を受けにくい構造とされている。
【0024】
なお、本実施形態では、前記荷重センサは、車両の進行方向に向かって左右に2列、合計4個によって計量台32の4隅を支持したが、荷重センサの数は4個に限定されるものではない。車両の進行方向に向かって左右に2個ずつの代わりに、3個、又は4個で、合計6個又は8個、或いは、それ以上の個数の荷重センサにより計量台32を支持するようにしてもよい。なお、進行方向を先行き方向ということがある。
【0025】
(計量台32の効果)
上記のように第1荷重センサLC1〜第4荷重センサLC4は、高精度計量を可能にするために、前記基礎面34に対して設置することにより、荷重センサの設置位置が変化することなく、第1荷重センサLC1〜第4荷重センサLC4の荷重受け部35aと計量台32とは可動自由に接触する構造となっている。このため、第1荷重センサLC1〜第4荷重センサLC4が支持する計量台32は、常に水平姿勢であって、該計量台32に設けられた後述する傾斜ブロックによって車両に傾斜を与えることにより車両の重心位置が測定できる。
【0026】
図2(a)〜(c)に示すように、計量台32の車両を積載する水平面32aには、左輪用傾斜ブロック36A〜36C、及び右輪用傾斜ブロック37A〜37Cが車両、例えば貨物自動車の車軸数、大きさ等の仕様に合わせて装着されている。すなわち、左輪用傾斜ブロック、及び右輪用傾斜ブロックを左右一対を一組としたとき、車軸数の数に一致した組数が、計量台32の車両を積載する水平面32aに装着されている。例えば、2〜4軸の場合は、それぞれ2〜4組の傾斜ブロックが装着されている。本実施形態では、全輪数×駆動輪数=6×2で、かつ前1軸、後2軸である貨物自動車(ワンデフ車)の計量が可能に前記ブロックが配置されている。
【0027】
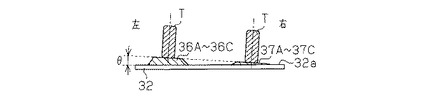
各傾斜ブロック36A〜36C、37A〜37Cの上面は、前記貨物自動車のタイヤ(車輪)が載ることができる面積を有するとともに、車両の進行方向に対して直角の方向において、図2(c)に示すように所定の傾斜角度θを有するように形成されている。すなわち、本実施形態では、図5に示すように、車両の左右の車輪が左輪用傾斜ブロック36A〜36C、及び右輪用傾斜ブロック37A〜37Cにそれぞれ載った際に、右に傾くように計量台32の車両を積載する平面に対してθをなす仮想傾斜面に、各傾斜ブロックの上面が傾斜している。なお、本実施形態では、車両が右に傾くように各傾斜ブロックの上面を傾斜しているが、車両が左に傾くように各傾斜ブロックの上面を傾斜させてもよい。
【0028】
図2(b)において、L1は、ワンデフ車の貨物自動車において、前から数えて第1軸と第2軸の軸間距離であり、L2は第2軸と第3軸の軸間距離である。L3は、左右車輪の中心距離である。L4は、車両の進行方向に向かって左右に配置した荷重センサLC1・LC4間、及び荷重センサLC2・LC3間の距離である。各傾斜ブロック36A〜36C、37A〜37Cの上面の車両の進行方向に直交する幅寸法L5(横幅)は、後輪のダブル構成のタイヤ幅よりも長い寸法としている。又、図2(b)に示すように、各傾斜ブロックの上面の車両の進行方向の長さ寸法L6は、車両のタイヤの路面接地寸法にほぼ等しい程度の長さにしている。
【0029】
上記のように、貨物自動車の車軸数、大きさ等の仕様に合わせて各傾斜ブロックが計量台32に対して装着されている。
又、各傾斜ブロックは、測定対象である車両の全てのタイヤT(車輪)が、図2(a)の実線で示すように傾斜ブロック上に載らない状態(すなわち、車両が水平姿勢の状態)では、前記傾斜ブロックに触れない状態を取ることができるように傾斜ブロックが配置されている。そして、車両が前記水平姿勢から、少し進行方向に移動して傾斜ブロックの上面に載りこみした場合、車両が前記傾斜角度θで傾斜姿勢をとることが可能となっている。又、図3に示すように計量台32の水平面32a及び左輪用傾斜ブロック36A〜36Cの上面には、車両の進行方向に沿って左ライン40Lが、水平面32a及び右輪用傾斜ブロック37A〜37Cの上面には、右ライン40Rが互いに平行にペンキ等により描かれている。
【0030】
(荷重センサの概略説明)
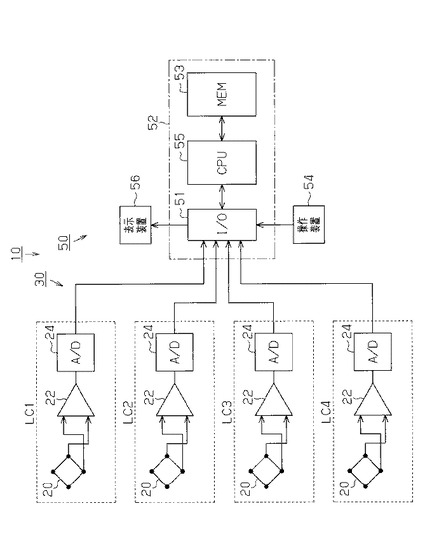
図8に示すように、第1荷重センサLC1〜第4荷重センサLC4の各ロードセルは、4枚の歪ゲージからなるホイートストンブリッジ回路20を備えている。ホイートストンブリッジ回路20には、直流電源電圧が印加されている。ホイートストンブリッジ回路20は、荷重センサに一体に組み込まれた増幅器22、アナログ・デジタル変換器(A/D変換器)24を介して演算制御装置52に接続されている。すなわち、ホイートストンブリッジ回路20は、歪ゲージが検出した歪み量に応じたアナログ荷重信号を出力し、このアナログ荷重信号は、増幅器22により増幅されてA/D変換器24によりデジタル荷重信号に変換され、重量値測定装置50の演算制御装置52に入力される。このように、第1荷重センサLC1〜第4荷重センサLC4は、デジタル荷重信号を出力するデジタル荷重センサである。
【0031】
(重量値測定装置50の概略説明)
図8に示すように重量値測定装置50は、演算制御装置52と、操作装置54と、表示装置56とを備えている。
【0032】
演算制御装置52は、主として、I/O(インターフェイス)回路51と、メモリ53と、中央演算処理装置(CPU)55とにより構成されている。
I/O回路51は、第1荷重センサLC1〜第4荷重センサLC4のA/D変換器24と、操作装置54と、表示装置56と、メモリ53と、CPU55との間で各種の信号やデータの受け渡しを行う機能を有している。
【0033】
メモリ53は、ROMやRAMなどで構成され、所定プログラムや基本データなどを長期的に記憶したり、種々のデータや演算用数値などを一時的に記憶したりする機能を有している。CPU55は、メモリ53に格納されている所定プログラムの指示に従って、必要な信号をI/O回路51を介して受け取り、また必要なデータをメモリ53から受け取り、受け取った信号やデータに基づいて演算を実行する機能を有している。
【0034】
操作装置54は、操作スイッチや数値キーなどを備えてなり、測定開始・終了の動作や零点調整動作、使用モードの切り換え動作、数値設定動作などの種々の動作の際に用いられる。表示装置56は、例えば液晶ディスプレイからなり、測定結果や各種データの入出力画面などが表示される。
【0035】
(重量値測定装置50の制御系システムの処理動作の概略説明)
重量値測定装置50の制御系システムにおいては、計量部30における第1荷重センサLC1〜第4荷重センサLC4の荷重信号が、I/O回路51を経由してCPU55に送られる。CPU55は、メモリ53に格納されている重量測定プログラム等の所定プログラムに従って、I/O回路51からの信号を取り込み、またメモリ53に記憶されている種々のデータを読み込み、これらの信号やデータに基づいて車両の重量、及び重心位置を含む重量位置関連情報の生成を実行する。そして、その生成結果(重量位置関連情報)は表示装置56に表示されるとともに情報出力手段70を介して、車両走行危険度評価システム100に出力される。
【0036】
(情報出力手段70の概略説明)
情報出力手段70は、I/Oインターフェイスであり、車両走行危険度評価システム100に対して重量位置関連情報を含む各種情報を送信可能である。情報出力手段70は、具体的には、車両走行危険度評価システム100に対し有線接続する場合には、通信ケーブル72(例えば、USBケーブル、イーサネット(登録商標)ケーブル等)を、取り外し可能に接続する。そして、前記ケーブルにより車両走行危険度評価システム100に設けられた情報入力手段116としてのI/Oインターフェイスに接続される。なお、USBケーブルを接続する代わりに、I/Oインターフェイスに設けられるUSBポートにUSBメモリを接続して、重量位置関連情報を含む各種情報を、情報出力手段70と車両走行危険度評価システム100との間でやりとりしてもよい。
【0037】
なお、無線接続の場合、例えば、無線LANにより接続する場合、情報出力手段70としての無線LANインターフェイスを介して行い、車両走行危険度評価システム100に設けられた情報入力手段としての無線LANインターフェイスとデータ通信が行われる。
【0038】
(演算制御装置52の機能説明)
演算制御装置52においては、重量測定プログラムがCPU55で実行されることにより、図1(a)に示される重量値測定部55aの機能、すなわち、重量位置関連情報の生成機能が実現される。重量値測定部55aは重量測定手段に相当する。
【0039】
(車両走行危険度評価システム100の構成の説明)
次に車両走行危険度評価システム100を図1(a)を参照して説明する。
車両走行危険度評価システム100は、例えば、計量対象物の車両、或いは、計量対象物のコンテナを運搬する車両(トレーラ)に搭載されるものである。車両走行危険度評価システム100は、制御回路110と、位置検出器120と、操作スイッチ群130と、外部記憶装置140、ディスプレイ150及び音声合成回路(図示しない)を介して接続されたスピーカ(図示しない)を備えている。ディスプレイ150及び音声合成回路(図示しない)を介して接続されたスピーカ(図示しない)は、提示手段に相当する。制御回路110は、コンピュータとして構成されるとともに、CPU111、ROM112、RAM113を有する。なお、ROM112は、書き込み可能な不揮発性メモリからなる。
【0040】
制御回路110は、本実施形態では、カーナビゲーション装置(以下、単にカーナビという)の制御回路として構成されているが、カーナビに限定されるものではない。なお、カーナビは、車両に固定されるものに限らず、車両から着脱自在に取付けできるもの、或いは、人が車両に持ち込み、持ち出し可能なポータブルのものも含む趣旨である。前記制御回路110内のROM112には、地図表示機能、経路演算機能、経路案内機能等のナビゲーションの機能を実現するためのソフトウェア、走行予定経路の設定及び重心高さ算出プログラム、危険度評価プログラム等、各種ソフトウェアがインストールされている。
【0041】
位置検出器120は、地磁気センサ121、ジャイロスコープ122、距離センサ123、及びGPS受信機124を含む構成となっている。前記地磁気センサ121は、地磁気を検出することにより、車両の進行方向を検出する。ジャイロスコープ122は、車両の旋回状態を検出する。距離センサ123は、車両の走行距離を検出する。GPS受信機124は、GPS(Global Positioning System)衛星からの電波を受信して、車両の現在位置を緯度及び経度に基づいて検出する。
【0042】
前記地磁気センサ121、ジャイロスコープ122、GPS受信機124により自立航法が可能となっている。又、GPS受信機124と自立航法とにより、それぞれの短所を補う。例えば、位置検出器120では、GPS受信機124が検出した緯度・経度の情報を基準に、地磁気センサ121、ジャイロスコープ122、距離センサ123の検出した結果を加味した補正を行うことにより、車両の現在位置を正確に検出することができる。操作スイッチ群130は、例えば、地図の表示切り換え、拡大表示、縮小表示を指示したり、スクロールを指示したり、経路計算のための目的地を入力するといった各種操作を実行するためのスイッチ類を備える。
【0043】
外部記憶装置140は、例えば、ハードディスクが代表的である。外部記憶装置140は、CD或いはDVD読み取り装置であってもよい。この外部記憶装置140は、例えばハードディスクの場合、該ハードディスクに地図データである道路マップがデータベース化されている。外部記憶装置140は、道路マップデータベースを構成している。
【0044】
又、外部記憶装置140は、地名や施設名とその緯度・経度座標とを対応付けたデータ等を記憶しておくことにより、経路計算の際の目的地の選択を容易にするためにも利用される。ディスプレイ150は、例えば、カラー液晶表示装置であるが、限定するものではない。
【0045】
(地図データの説明)
地図データは、例えば、道路地図をディスプレイ150にグラフィック表示するための道路地図データと、経路探索に必要な一方通行や車両通行禁止などの交通規制データ、各地点の所在地データ、目的地検索や地点登録のために必要な登録地点データを含む。
【0046】
又、地図データには、経路探索において出発地から目的地までの所要時間を算出するために必要な次のデータ、すなわち、道路情報が含まれている。例えば、道路地図上の所定の道路区間毎に道路区間IDが付され、各道路区間に対して、道路種別(例えば高速道路、国道、県道、市道、農道など)、道路属性(その道路区間が特定の道路、例えば国道n号線に属しているなどの関係付け)、道路区間距離(その道路区間の長さ)、ノード座標(その道路区間の始点と終点の緯度経度座標、交差点等の特徴的な地点)、道路区間旅行時間(その道路区間を走行するのに要する時間)などの道路区間データを含む。
【0047】
さらに、地図データ、すなわち、道路情報には、前記道路区間に存在する各カーブの緯度、経度、その曲率半径、道路横断勾配、及びそのカーブの地点名称等を含む。前記各カーブの緯度、経度には、そのカーブの入口位置の緯度、経度から、出口位置の緯度、経度、及び、前記入口位置から出口位置間(すなわち、カーブ中)における所定間隔毎の道路の緯度、経度を含む。
【0048】
又、本実施形態では、カーブは、地図データにおいて、曲率半径が付与された箇所のものをいう。
外部記憶装置140は道路情報を記憶する道路情報記憶手段に相当する。
【0049】
(情報入力手段116の概略説明)
情報入力手段116は、I/Oインターフェイスであり、地上測定部10の計量部30により計量対象物の車両の重量を測定する際に、車両走行危険度評価システム100は、地上測定部10に対して接続される。接続方法は、前述したように有線接続でもよいし、或いは、無線接続であってもよい。有線接続の場合は、通信ケーブル72を、車両走行危険度評価システム100に設けられている情報入力手段116としてのI/Oインターフェイスに接続可能である。なお、USBケーブルを接続する代わりに、USBポートにUSBメモリを接続して、データをやりとりしてもよい。
【0050】
なお、無線接続の場合、例えば、無線LANにより接続する場合、情報入力手段116としての無線LANインターフェイスを介して地上測定部10の無線LANインターフェイスとデータ通信が行われる。
【0051】
(車速センサ126、傾斜センサ128の概略説明)
車両走行危険度評価システム100の制御回路110には、車両の速度を検出する車速センサ126が接続されている。又、制御回路110には、車両の進行方向に向かって左右の車両傾斜角度θsを検出する傾斜センサ128が接続されている。傾斜センサ128は、車両傾斜角度θsを制御回路110に出力する。本実施形態では、傾斜センサ128は、車両の状態である車両状態情報としての車両傾斜角度θsを測定して生成する車両状態測定手段及び車両傾斜角度測定手段に相当する。傾斜センサ128は、車両が走行中及び停止中の場合も、車両の傾斜状態を示す車両傾斜角度θsの検出が可能である。
【0052】
(制御回路110の重心位置情報に関する処理動作の概略説明)
制御回路110のCPU111は、ROM112に格納されている重心高さ及び安全傾斜限界角度算出プログラムに従って重量値測定装置50から送られた重量位置関連情報に基づいて、重心高さhの演算を実行する。このようにして、CPU111は、重心位置情報算出部114、及び危険度評価部115の機能を実現する。重心位置情報算出部114(すなわち、CPU111)は、重心位置情報算出手段に相当する。危険度評価部115(すなわち、CPU111)は、危険度評価手段に相当する。又、CPU111は、
<車両の重心位置x及び重心高さhの求め方の理論説明>
車両の重心Gの位置(重心位置ともいう)x及び重心高さhは、車両を計量台32の水平面32aに水平姿勢となった状態で複数の荷重センサにより測定された値と、傾斜ブロック(傾斜ブロックは、この欄では、説明の便宜上、右輪用傾斜ブロック、左輪用傾斜ブロックブロックの両者を含む趣旨で使用する。)に車両を載せて傾斜姿勢となった状態で複数の荷重センサにより測定された値と、傾斜角度θに基づいて求める。
<車両の水平姿勢での記号の定義(車両、計量台関連)の説明、及び式の説明>
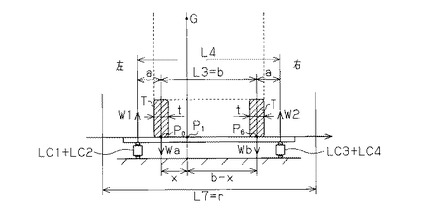
図4、図6及び下記理論式で用いる記号の意味を下記のとおり定義する。
【0053】
G:水平姿勢の車両の重心
L1:第1軸と第2軸の軸間距離
L2:第2軸と第3軸の軸間距離
L3:左右車輪の中心距離
L4:荷重センサLC1・LC4間、及び荷重センサLC2・LC3間の距離
L5:傾斜ブロック上面の車両の進行方向に直交する幅寸法
L6:傾斜ブロックの上面の車両の進行方向の長さ寸法
t:車輪幅(タイヤ幅)
a:第1荷重センサLC1(第2荷重センサLC2)の中心点と水平面32a上の第1〜3車軸の左側の車輪列の中心点(作用点)との距離、並びに第3荷重センサLC3(第4荷重センサLC4)の中心点と水平面32a上の第1〜3車軸の右側の車輪列の中心点(作用点)との距離
θ :傾斜ブロックの上面の傾斜角度
P0:水平面32a(又は道路面)上の左側の車輪列の中心点(作用点)
P1:重心Gから垂線を降ろしたときの水平面32aとの交点
P6:水平面32a(又は道路面)上における右側の車輪列の中心点(点)
なお、上記記号のうち、L1〜L6、θ、a,tは既知の値であり、これらの値は予めメモリ53、操作装置54の数値キー等の入力操作により記憶されている。
【0054】
<記号の定義(力学関連)の説明>
W11:左側のロードセル列の第1荷重センサLC1(ロードセル)の荷重の測定値
W12:左側のロードセル列の第2荷重センサLC2(ロードセル)の荷重の測定値
W21:右側のロードセル列の第3荷重センサLC3(ロードセル)の荷重の測定値
W22:右側のロードセル列の第4荷重センサLC4(ロードセル)の荷重の測定値
W1:左側のロードセル列のロードセルに発生した合計荷重
W2:右側のロードセル列のロードセルに発生した合計荷重
Wa:3軸の左側の車輪列の合計荷重
Wb:3軸の右側の車輪列の合計荷重
Wt:総荷重
x:車両の幅方向において、水平面32a上に垂直に投射した重心Gの点P1と、水平面32a上の左車輪重の中心点(作用点)P0との距離、すなわち、車両の重心位置
図4に示すように、水平面32a上の左車輪重の作用点(すなわち、左側の車輪列の中心点)、及び右側の車輪列の中心点の計量台32の水平面32a上における点をそれぞれP0,P6とすると、左右のロードセル列の設置間隔L4は、既知であり、左右の車輪間隔(左右車輪の中心距離)L3(=b)も既知である。P0から左側のロードセル列迄の距離、及びP6から右側のロードセル列迄の距離も既知の値a=(1/2)・(L4−b)となるように構成されている。
【0055】
上記W1,W2,W11,W12,W21,W22,Wtは、下記式(1)〜式(3)が成立する。
W1=W11+W12 ……(1)
W2=W21+W22 ……(2)
Wt=W1+W2 ……(3)
W1とW2の荷重測定値、3軸の左側の車輪列の合計荷重Wa,3軸の右側の車輪列の合計荷重Wb、距離a,距離b,車両の重心位置xには、下記式(4)〜式(6)が成立する。式(4)〜式(6)に基づいて、Wa,Wbを消去すると、車両の重心位置xは下記式(7)で求めることができる。
【0056】
Wa+Wb=W1+W2 ……(4)
Wa・x=Wb・(b−x) ……(5)
(a+x)・W1=(b−x+a)・W2=(a+b−x)・W2……(6)
x={(W2−W1)・a+b・W2}/(W1+W2) ……(7)
<車両の傾斜姿勢での記号の定義(車両、計量台関連)の説明、及び式の説明>
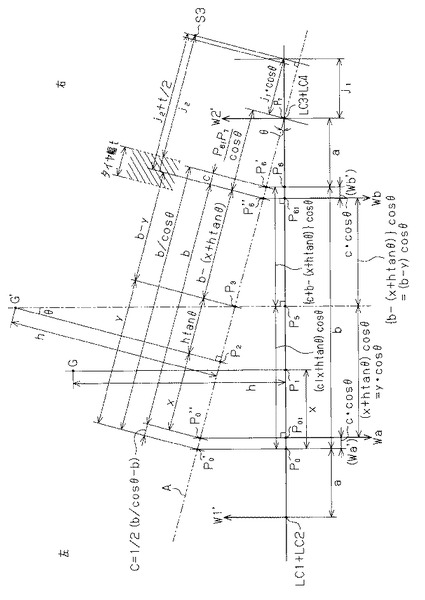
図6及び下記理論式で用いる記号の意味を下記のとおり定義する。
【0057】
A :傾斜ブロックにより形成されて、車両が積載される仮想傾斜面(水平面32aが傾斜角度θで傾斜したと同じ面)
G’ :傾斜角度θで傾斜した車両の重心
P0’ :P0から垂線を立てたときの仮想傾斜面Aとの交点
P0”:傾斜角度θで傾斜したときの左側の車輪列の中心点(作用点)
P01 :P0”に掛かる合計荷重Waの水平面32a上の位置
P1 :重心Gから水平面32aに垂直に投射したときの交点
P2 :重心G’から垂線を降ろしたとき仮想傾斜面Aとの交点
P3 :重心G’から水平面32aに垂線を降ろしたときの仮想傾斜面Aとの交点
P5 :重心G’から水平面32aに垂線を降ろしたときの水平面32aとの交点
P6’ :P6から垂線を立てたときの仮想傾斜面Aとの交点
P6”:傾斜角度θで傾斜したときの右側の車輪列の中心点(作用点)
P61 :P6”に掛かる荷重合計値Wbの水平面32a上の位置
h :水平面32aからの重心Gの高さ(重心高さ)
<記号の定義(力学関連)の説明>
W11’:傾斜時の左側のロードセル列の第1荷重センサLC1の荷重の測定値
W12’:傾斜時の左側のロードセル列の第2荷重センサLC2の荷重の測定値
W21’:傾斜時の右側のロードセル列の第3荷重センサLC3の荷重の測定値
W22’:傾斜時の右側のロードセル列の第4荷重センサLC4の荷重の測定値
W1’:傾斜時の左側のロードセル列のロードセルに発生した合計荷重
W2’:傾斜時の右側のロードセル列のロードセルに発生した合計荷重
図6に示すように、車両を傾斜ブロックに載せたときの傾斜ブロック上での左右の車輪の中心位置をP0”、P6”としたとき、P0”・P6”間の距離は、P0”・P6”=bである。傾斜ブロック上のそれぞれP0”、P6”に車輪中心位置に掛かる左側及び右側の車輪列の合計荷重Wa,Wbの位置は、計量台32の水平面32a上では、図6に示すようにP01,P61になる。
【0058】
水平面32a上のP0,P6からそれぞれ立てられた垂線と仮想傾斜面Aとが交わる点を交点P0’,P6’としたとき、交点P0’,P6’間の距離は、下記式(8)で求めることができる。
【0059】
P0’P6’=P0P6/cosθ=b/cosθ(>b) ……(8)
ここで車両は、P0’P6’とP0P6(=b)の差の1/2ずつに等しく振り分けて傾斜ブロック上に載り込んだとし、P0’P0”、及びP6’P6”の距離をcと置き、
c=P0’P0”=P6’P6”=(b/2)・(1/cosθ−1)……(9)
とする。
【0060】
なお、ここでは、式(9)としているが。式(10)とした計算法でもよい。
P0’P0”=0 ……(10)
P6’P6”=b(1/cosθ−1) ……(11)
いずれであっても、P0’P0’及びP6’P6”の値はa、b、hに比べて小さい値であるように車輪は傾斜ブロック上に載り込むものとする。
【0061】
水平姿勢の車両において、計量台32の水平面32aでの重心位置であるP1は、車両が傾斜ブロック上に載り込むことによって形成される仮想傾斜面A上では、P2の位置に対応する。ここで、P0P1=P0”P2=xである。
【0062】
P2から仮想傾斜面A上に垂線を立てると、該垂線上において、P2からhの距離に、傾斜姿勢の車両における重心G’が存在する。
重心G’から計量台32の水平面32a上に垂線をおろした点P5が、車両が傾斜することにより重心Gが計量台32を水平方向に移動した点である。この垂線と仮想傾斜面Aとの交点をP3とすると、
P2P3=h・tanθ ……(12)
P3P6”=b−(x+h・tanθ) ……(13)
である。
【0063】
P0”とP6”の点にて車両からの合計荷重Wa,Wbがそれぞれ計量台32上の水平方向に対して垂直に負荷され、計量台32上の水平方向ではそれぞれP01、P61に負荷される。このため、車両が傾斜ブロック上に載り込むことにより、左側のロードセル列の第1荷重センサLC1、第2荷重センサLC2に発生した積載荷重W11’、W12’の合計荷重W1’は下記式(14)で求まる。又、右側のロードセル列の第3荷重センサLC3、第4荷重センサLC4に発生した積載荷重W21’、W22’の合計荷重W2’は、下記式(15)で求まる。
【0064】
W1’=W11’+W12’ ……(14)
W2’=W21’+W22’ ……(15)
又、
Wa+Wb=W1’+W2’ ……(16)
Wa・y・cosθ=Wb・(b−y)・cosθ ……(17)
{a+(c+y)・cosθ}・W1’={a+(c+b−y)・cosθ}・W2’ ……(18)
より、Wa、Wbを消去することにより、重心Gの計量台32の水平面32aからの重心高さhを、
h=(1/tanθ)・{(Q/cosθ)−(c+x)} ……(19)
と算出できる。
【0065】
ただし、式(17)、式(18)中のy、及び式(19)中のQは、下記のように定義される。
y=x+h・tanθ ……(20)
Q=
{(W2’−W1’)・(a+c・cosθ)+b・cosθ・W2’}/(W1’+W2’)) ……(21)
(計量台32の測定の変形例)
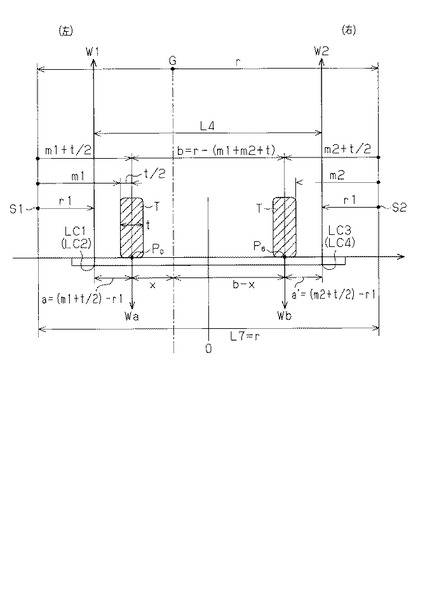
上記は、左右車輪の中心間隔がL3=bとして既知の車種が検査対象であって、車輪載り込み位置の詳細が指定され、所定の車種の計量台及び傾斜ブロック上の所定位置に載り込ませた場合である。車両が計量台32の位置に載り込ませることが難しい場合、下記のように計量部30を構成してもよい。
【0066】
図7に示すように、計量台32の左右の幅方向中心から対称にL7=rの間隔であるとともに、左右の荷重センサの荷重負荷の支持中心からの距離がr1の地表面の位置に距離測定のための測距センサS1,S2が設置されている。測距センサS1,S2は、超音波センサ、レーザ距離計や、或いは、ステレオカメラから構成される。ステレオカメラの場合には、該ステレオカメラが撮像した画像が図示しない画像処理装置に入力され、画像処理装置において、測定対象物までの距離が三角測量の原理で計測される。
【0067】
具体的には、左側の測距センサS1から左側のタイヤT迄の距離m1と、右側の測距センサS2から右側のタイヤT迄の距離m2を各測距センサS1,S2で測定する。なお、車両のタイヤ幅は、既知の値tとする。
【0068】
ここで、W1とW2の荷重測定値、3軸の左側の車輪列の合計荷重Wa,3軸の右側の車輪列の合計荷重Wb、距離a,距離b,車両の重心位置xには、下記式(22)〜式(28)が成立する。式(22)〜式(28)に基づいて、Wa,Wbを消去すると、車両の重心位置xは下記式(29)で求めることができる。
【0069】
Wa+Wb=W1+W2 ……(22)
Wa・x=Wb・(b−x) ……(23)
(a+x)W1=(b−x+a’) ……(24)
ただし、 a =(m1+t/2)−r1 ……(25)
a’=(m2+t/2)−r1 ……(26)
b =r−(m1+m2+t) ……(27)
(a+x)・W1=(b−x+a)・W2=(a+b−x)・W2……(28)
x={(W2−W1)・a+b・W2}/(W1+W2) ……(29)
(第1実施形態の作用)
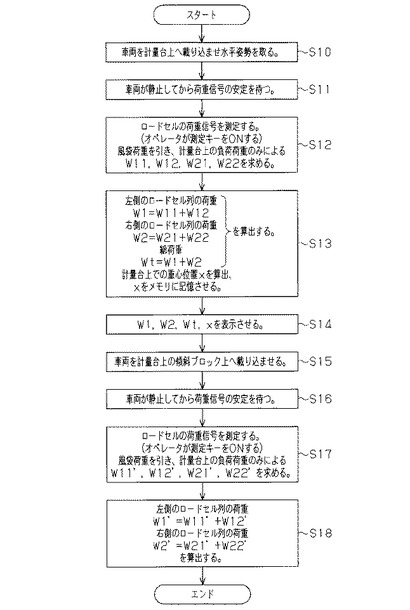
次に、上記のように構成された、地上測定部10と、車両走行危険度評価システム100の作用を説明する。図9は地上測定部10の計量部30で行う作業フローチャートである。
【0070】
S10において、車両の運転者は、図3に示すように、左ライン40L及び右ライン40RをタイヤT(車輪)が踏むように車両を計量台32に搬入する。このとき、運転者は、左ライン40L及び右ライン40Rの真上にタイヤTが載り込むように車両を計量台32に載り込ませる。そして、運転者は、2軸目のタイヤTが左輪用傾斜ブロック36C、右輪用傾斜ブロック37Cを降りたところで図2の実線で示すように車両を停止させ、水平姿勢による計量状態をとる。
【0071】
そして、S11で、車両が計量台32上で静止してから荷重信号の安定を待つ。
S12では、演算制御装置52のオペレータが、操作装置54の測定キーをオン操作して、第1荷重センサLC1〜第4荷重センサLC4(すなわち、ロードセル)から出力される荷重信号を測定する。すなわち、演算制御装置52のCPU55は、第1荷重センサLC1〜第4荷重センサLC4からの荷重信号を受け取り、重量測定プログラムを実行して重量値測定部55aとして機能する。
【0072】
重量値測定部55aは、零点移動成分荷重(車両が計量台32に載り込む前に零点調整がなされ、記憶された荷重)と、風袋荷重(計量台32などの荷重を含む)とを、前記荷重信号の測定結果から除去し、計量台32上の負荷荷重のみにより、前記W11,W12,W21,W22を求める。
【0073】
S13では、重量値測定部55aは、S12で求めたW11,W12,W21,W22に基づいて、前記式(1)、式(2)、式(3)によりW1,W2,Wtを算出する。
又、重量値測定部55aは、上記式(7)により、重心位置xを求める。
【0074】
S14では、重量値測定部55aは、W1,W2,Wt,xを表示装置56に表示させる。
次に、S15では運転者は、車両を進行方向に移動させて全車輪を傾斜ブロック36A〜36C,37A〜37C上に載り込ませて、停止させる。すると図5に示すように、車両(図5では、タイヤのみ図示)は傾斜角度θの傾斜姿勢となる。そして、S16で、車両が傾斜ブロック上で静止してから荷重信号の安定を待つ。
【0075】
S17では、演算制御装置52のオペレータが、操作装置54の測定キーをオン操作して、第1荷重センサLC1〜第4荷重センサLC4(すなわち、ロードセル)から出力される荷重信号を測定する。すなわち、演算制御装置52のCPU55は、第1荷重センサLC1〜第4荷重センサLC4からの荷重信号を受け取り、重量測定プログラムを実行して重量値測定部55aとして機能する。
【0076】
重量値測定部55aは、零点移動成分荷重(車両が計量台32に載り込む前に零点調整がなされ、記憶された荷重)と、風袋荷重(計量台32などの荷重を含む)とを、前記荷重信号の測定結果から除去し、計量台32上の負荷荷重のみにより、前記積載荷重W11’,W12’,W21’,W22’を求める。
【0077】
S18では、重量値測定部55aは、式(14)、式(15)により、W1’、W2’を算出する。
重量値測定部55aは、上記S13,及びS18等で算出した合計荷重W1,合計荷重W2,総荷重Wt,重心位置x,合計荷重W1’,合計荷重W2’をメモリ53に記憶する。
【0078】
(車両走行危険度評価システム100の重量位置関連情報の取得処理)
この後、地上測定部10の情報出力手段70と、車両の車両走行危険度評価システム100の情報入力手段116とが通信ケーブル72を介して、或いは無線LAN等により通信が可能な状態とする。この状態で運転者の操作スイッチ群130のキー操作により、メモリ53に記憶された重心位置x,傾斜角度θ,距離a,b,合計荷重W1,W2,W1’,W2’,総荷重Wtが車両走行危険度評価システム100に出力される。ここで、重心位置x,合計荷重W1,W2,W1’,W2’が重量位置関連情報に相当する。又、傾斜角度θ,距離a,bは、重心高さh(重心位置関連情報)を算出(生成)するためのパラメータとなる。
【0079】
車両走行危険度評価システム100では、地上測定部10から出力された合計荷重W1,W2,W1’,W2’,総荷重Wt,重心位置x,傾斜角度θ,距離a,bを、制御回路110のRAM113に記憶する。
【0080】
(走行予定経路の設定及び重心高さの算出)
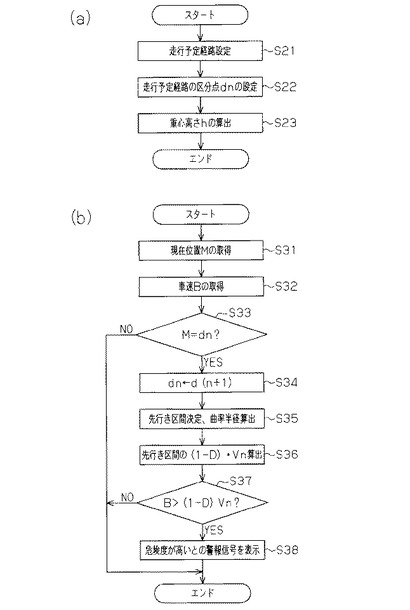
図10(a)は、車両走行危険度評価システム100の制御回路110が行う走行予定経路の設定及び重心高さhの算出フローチャートである。
【0081】
図10(a)のS21〜S23は、ROM112に記憶された走行予定経路の設定(探索)及び重心高さ算出プログラム(以下、単に探索プログラムという)により、CPU111が行う処理である。
【0082】
S21では、運転者は、操作スイッチ群130を操作して、出発地(例えば、操作スイッチ群130の操作時における車両の現在地)と目的地、走行条件(短い距離優先、一般道路優先、有料道路優先、広い道路優先等)等の拘束条件を付した探索指令を、操作スイッチ群130から制御回路110に出力する。すると、制御回路110のCPU111は、ROM112に格納された探索プログラムに基づいて、外部記憶装置140の道路マップデータベースから拘束条件(すなわち、探索条件)に合った経路探索を行う。そして、運転者は、操作スイッチ群130を操作することにより、前記探索結果の中から、走行予定経路を設定する。この探索結果及び設定された走行予定経路に関する道路情報はRAM113に記憶される。CPU111は、走行予定路設定手段に相当する。
【0083】
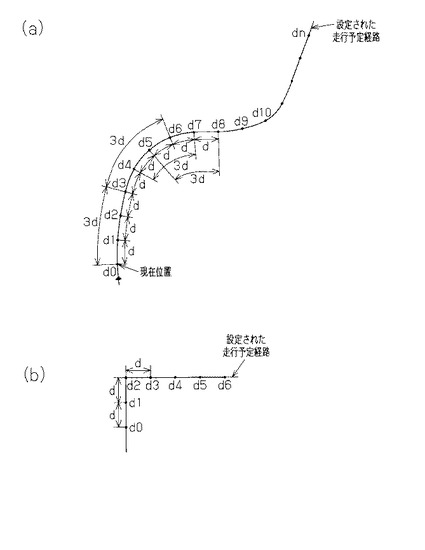
S22では、図11(a)に示すように走行予定経路の区分地点dn(n=0,1,2,3……)の設定が出発地から目的地まで順次付され、各区分地点dnの緯度・経度が、RAM113に記憶される。なお、前記各区分点のdnの緯度・経度は、走行予定経路の出発地、目的地、及びその走行経路のノード座標(緯度・経度)、曲路の入口位置、出口位置等に付与された緯度・経度に基づいて算出される。
【0084】
具体的には、前記走行予定経路に対して予め定めたd(m)ずつ区分地点が設定される。各区分地点は車両の現在位置よりも先行き方向に位置する危険度評価位置となる。dの値は、限定するものではないが、例えば数十m〜数百mの範囲であればよい。d(m)毎に区切られる区間を以下、単位区間という。
【0085】
ここで、CPU111は、危険度評価位置設定手段に相当する。
S23では、重心位置情報算出部114は、RAM113に記憶した合計荷重W1,W2,W1',W2',重心位置x,傾斜角度θ,距離a,bと、前記式(19)〜式(21)、式(9)を使用して重心高さhを算出する。重心位置情報算出部114は算出した重心高さhをRAM113に記憶し、このフローチャートの処理を終了する。
【0086】
なお、S23の処理は、S22後に行われる必要はなく、S21とS22の間、或いはS21の前で行われても良い。又、S23の処理は、S22の処理後に行う代わりに、後述するS31〜S35の間で行われても良い。
【0087】
(危険度評価処理)
次に、図10(b)を参照して、本実施形態の危険度評価処理について説明する。
図10(b)は、危険度評価プログラムのフローチャートである。車両が、前記走行予定経路を走行中は、CPU111は、危険度評価プログラムを所定周期(例えば、数〜数十ms)毎に実行する。CPU111は、このプログラム実行時には、危険度評価部115として機能する。
【0088】
S31では、CPU111は、車両が走行する現在位置Mを位置検出器120から取得する。位置検出器120は現在位置取得手段に相当する。
S32では、CPU111は、車速センサ126から車速Bを取得する。車速センサ126は、車速取得手段に相当する。
【0089】
S33では、CPU111は、車両の現在位置Mが区分地点dnに達したか否かを判定する。なお、dnの「n」の初期値は、「0」である。区分地点dnに達していない場合には、このフローチャートを一旦終了する。
【0090】
S33において、現在位置Mが区分地点dnに達している場合には、S34において、CPU111は、次回の制御周期以降で危険度評価位置となる区分地点dnをd(n+1)に更新する。
【0091】
S35では、CPU111は、先行き区間の決定及び曲率半径算出処理を行う。前記先行き区間、すなわち、危険度評価対象区間は、車速Bが速いほど、現在位置Mと一致した区分地点dnから遠位となるように決定される。
【0092】
まず、CPU111は、危険度評価位置である区分地点dnからK(係数)・dだけ離間した先行きの地点(先行き位置)からの先行き区間を求めるために、前記K(係数)を設定する。ここで、危険度評価位置である区分地点dnからK(係数)・dだけ離間した距離は、請求項6の所定距離に相当する。
【0093】
(係数Kの設定例1)
Kの設定は、例えば、区分地点(危険度評価位置)での車速Bが、B≦70km/hのときは、K=3とし、70km/h<B≦90km/hのときは、K=4とし、90km/h<B≦120km/hのときは、K=5とし、120km/h<Bのときは、K=6のように、現在の車速Bが速いほど、現在位置Mよりも遠位の地点の評価を行うようにする。この場合、係数Kと車速Bとをマップ化されたテーブルが、ROM112に予め記憶されており、現在の車速Bに応じて前記係数Kが読み出される。
【0094】
(係数Kの設定例2)
又、上記のように段階的でなく、現在の車速Bと、地上測定部10によって測定された総荷重Wt(質量:Wt/g)との積(運動量)をパラメータにとるとともに、変換係数uを設け、下式(30)により、係数Kを求めてもよい。gは重力加速度である。
【0095】
K=u・B・(Wt/g) ……(30)
(なお、右項が小数の場合は、四捨五入して整数化するものとする。)
設定例1、2のようにすると、現在の車速Bが速いほど、又、車両の総荷重Wtが大きいほど(運動量が大きいほど)、遠い先行きの危険度評価対象区間において、危険度評価位置の車速Bと当該危険度評価対象区間の安全限界速度Vnを評価できるようになる。又、現在の車速Bを継続すれば危険である場合に、ブレーキ操作による減速対応が滑らかに可能になる。
【0096】
上記のように、係数Kを設定すると、CPU111は、先行き位置K・dを求め、次に、先行き位置K・dから始まる先行き区間(危険度評価対象区間)K1・dを設定する。ここで、K1は、係数であり、Kと同じでもよく、或いは同じでなくても良いが、「2」以上の整数である。すなわち、先行き位置K・dから始まる先行き区間は、d(m)毎に区切られる単位区間を複数有する区間からなる。
【0097】
(K,K1の具体例)
具体例で説明すると、図11(a)では、車速が一定であるとするとともに、K=K1=3とした例で先行き区間を3つの単位区間で構成する場合の例を示している。図11(a)では、「d0」、「d1」、「d2」、……「dn」は、区分地点を表している。
【0098】
図11(a)に示す車両が区分地点d0に位置すると、先行き位置K・dは、区分地点d0から3d離間した区分地点d3となり、このときの先行き区間は、区分地点d3から区分地点d6迄の区間となる。
【0099】
次に、車両が、区分地点d1に達した場合は、区分地点d1から3d離間した先行き位置は、区分地点d4となり、このときの先行き区間は、区分地点d4から区分地点d7迄の区間となる。以後、同様に区分地点に車両が到達する毎に、先行き区間は、3d離間した先行き位置から始まる3つの単位区間分となる。
【0100】
さらに、図11(a)に示す車両が区分地点d2に位置すると、先行き位置K・dは、区分地点d2から3d離間した区分地点d5となり、このときの先行き区間は、区分地点d5から区分地点d7迄の区間となる。
【0101】
なお、道路をdの距離でもって区分化し、先行き区間(危険度評価対象区間)を、本例のようにd3〜d6、d4〜d7、d5〜d8のように区分が異なる箇所を設けた理由、及び先行き区間を複数の区分で構成している理由は下記の通りである。
【0102】
すなわち、図11(b)において、区分の設定を、仮に先行き区間(危険度評価対象区間)をd0〜d2、d2〜d4、…と、区分の重なりを取らなかった場合に、地点の設定によってはこれらの区間は、ほぼ直線路として評価されてしまう可能性があるからである。又、先行き区間(危険度評価対象区間)が単一区分ずつの間隔とした場合、d1〜d2、d2〜d3、…となって、地点の設定や曲路の状態によっては、評価すべき曲路がこれらの間に含まれず、危険度評価がなされない可能性があるからである。
【0103】
又、図11(b)における、d0、d1、d2、d3、…の地点毎に、これらの地点に対応する道路の曲率半径により危険度を評価する方法も考えられる。しかし、例えば同図に示すように、曲路において、区分設定の地点が「d2」のようにうまく曲路部の上に設定されず、曲路部分より前後に外れ、直線路に近い部分を指定してしまうことがあり、このように、順次危険度評価対象区間が、先に行われた危険度評価対象区間と一部の重なりがない場合には、正しく危険度の評価ができない。
【0104】
次に、CPU111は、設定した先行き区間(危険度評価対象区間)K1・dの最小の曲率半径Rnを、設定した先行き区間が有する区分地点の緯度・経度に基づいて求める。
(遠心力の説明)
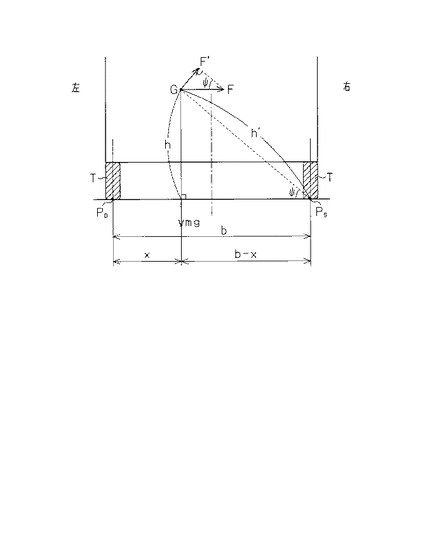
次に、車両が曲路を走行する際に、車両の重心Gに働く遠心力を、図12を参照して説明する。図12は、車両が紙面の表側から裏側に向かって左カーブの曲路を走行する場合を表しており、重心Gにおいて、右方向に遠心力Fが作用する。
【0105】
図12に示すP6の周りの回転モーメントについて、下記式(31)が成立すると、車両が浮き上がり転倒する。
F’・h’>m・g・(b−X) ……(31)
なお、記号は下記の通りである。
【0106】
m:車両の質量
g:重力加速度
R:曲路の曲率半径
V:車速
F:重心Gに掛かる遠心力
F’:P6を回転中心としたときの重心Gに働く力
h’:P6から重心Gまでの距離
図12に示すように重心GとP6とのなす角度をψとすると、
F’=F・sinψ ……(32)
h’=h/sinψ ……(33)
F=m・(V2/R) ……(34)
が成立するため、
h・m・(V2/R)=m・g・(b−X) ……(35)
となる。従って、
V=[g・R・{(b−x)/h}]1/2 ……(36)
が求まる。式(36)が車両の安全限界速度の算出式となる。
【0107】
フローチャートの話に戻して、S36では、CPU111は、設定した先行き区間(危険度評価対象区間)K1・dでの安全限界速度Vnを、上記式(36)に基づく下記式(37)により算出する。
【0108】
Vn=[g・Rn・{(b−x)/h}]1/2 ……(37)
さらに、CPU111は、安全限界速度Vnに余裕度Dを見込んだ1−Dを乗算する。余裕度Dとしては、例えばD=0.1が挙げられるが、余裕度Dの数値はD=0.1に限定されるものではなく、他の数値でもよい。この算出された(1−D)・Vnは、提示手段としてのディスプレイ150に表示される。
【0109】
S37では、CPU111は、車速Bが、(1−D)・Vnを超えているか否かを判定する。S37において、車速Bが、(1−D)・Vnを以下の場合は、このフローチャートを一旦終了する。S37において、車速Bが(1−D)・Vnを超えている場合は、S38において、CPU111は、車速Bが転倒の危険度が高い旨の警報信号をディスプレイ150及びカーナビが備えている図示しないスピーカの前段に設けられている図示しない音声合成回路、又は、スピーカに出力した後、このフローチャートを一旦終了する。前記ディスプレイ150に出力する警報信号は、車速Bが速すぎて転倒の危険度が高い旨の警告文意を表す、語句、文章である。又、前記音声合成回路に出力する前記警報信号は、前記音声合成回路により警告語句、警告文章を表す音声信号に変換されて前記スピーカで発声される。又、スピーカに出力された警報信号は、ブザー音等の警報音として鳴動される。
【0110】
なお、警報信号の出力は、ディスプレイ150及びカーナビが備えている図示しない、音声合成回路、或いはスピーカのいずれか1つであってもよい。前記ディスプレイ150での警告文意を表す、語句、文章、及びスピーカが出力する警告語句、警告文章、又は警報音は警報情報に相当する。
【0111】
本実施形態では、下記の特徴がある。
(1) 本実施形態の車両走行危険度評価システムは、道路情報を記憶する外部記憶装置140(道路情報記憶手段)と、車両の現在位置を取得する位置検出器120(現在位置取得手段)を備える。又、前記システムは、現在位置から目的地までの走行予定経路を、付与された探索条件の下で道路情報に基づいて設定するCPU111(走行予定経路設定手段)と、車両の重心位置関連情報を取得する情報入力手段116とを備える。又、システムは、車両の車速を取得する車速センサ126(車速取得手段)と、走行予定経路上において、現在位置から先行き方向に位置する危険度評価位置を設定するCPU111(危険度評価位置設定手段)を備える。さらに、システムは、車両が設定された危険度評価位置に到達した際に、走行予定経路上であって、当該危険度評価位置よりも先行き方向に離間した危険度評価対象区間に対して、該危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、前記重心位置関連情報と、前記危険度評価位置での車速に基づき、前記車両の危険度を評価するCPU111(危険度評価手段)を備える。そして、CPU111(危険度評価手段)の評価結果を提示するディスプレイ150等(提示手段)を備える。
【0112】
この結果、本実施形態のシステムによれば、車両が道路の曲路を走行するとき、車両の重心位置に作用する遠心力の大きさと重心位置情報による車両の転倒危険性の評価を行うことができる。又、常に走行予定経路に沿って現在走行している位置より先行きの道路事情に応じた危険度評価、警報と安全限界速度を予め前もって運転者に提示することができる。
【0113】
(2) 本実施形態のシステムのCPU111(危険度評価手段)は、車両が設定された危険度評価位置に到達した際の車速が速くなるほど、或いは、危険度評価位置に到達した際の車速と、前記重心位置関連情報から得られる前記車両の運動量が大きいほど、危険度評価位置からの離間距離を長くした危険度評価対象区間に対して危険度を評価するようにしている。
【0114】
なお、仮に、危険度評価位置と危険度評価対象区間との離間距離が車速に関係なく一定の場合、車速が速くなると、危険度評価対象区間に車両が到達する時間は短くなり、危険度の評価がされた危険度対象区間に対応する運転者の処置が遅れる可能性がある。
【0115】
それに対して、本システムによれば、設定された危険度評価位置に到達した際の車速が速いほど、現在速度を継続すれば危険である場合に、危険度評価対象区間に車両が到達する時間は長くなり、危険度評価位置からの離間距離を長くした危険度評価対象区間に対応して、ブレーキ操作による車両の減速対応が可能となり、すなわち、該危険度対象区間に対応する運転者の処置の遅れがなくなる。
【0116】
又、車両の運動量が大きいほど、ブレーキ操作による減速距離が長くなるが、危険度評価位置からの離間距離を長くすることにより、該危険度評価対象区間に進入する前に、ブレーキ操作による車両の減速対応が可能となる。
【0117】
又、危険度評価位置に到達した際の車速が速いほど、又は車両の運動量が大きいほど、区間距離を先行き方向へ長くした危険度評価対象区間の危険度の評価を行うことができる。
【0118】
(3) 本実施形態のシステムは、CPU111(危険度評価位置設定手段)は、危険度評価位置を先行き方向に複数設定する。又、CPU111(危険度評価部115)は、危険度評価手段として、順次危険度評価位置に車両が達する毎に、各危険度評価位置と所定距離(K・d)離間した危険度評価対象区間における車両の状態の危険度の評価を行う。
【0119】
この結果、本実施形態によれば、先行き方向に複数設定した危険度評価位置に車両が達する毎に、危険度評価位置と所定距離離間した危険度評価対象区間における車両の状態の危険度の評価を行うことができる。
【0120】
(4) 本実施形態のシステムでは、危険度評価部115(危険度評価手段)は、危険度評価位置に前記車両が達する度に、車両の危険度の評価が行われた前回の危険度評価対象区間と、一部が重なる新たな危険度評価対象区間において、車両の危険度を評価する。この結果、本実施形態によれば、曲路において、曲路部の上に危険度評価対象区間が設定されないことを防止でき、順次危険度評価対象区間が、先に行われた危険度評価対象区間と一部の重なりがない場合に比較して、正しく危険度の評価を行うことができる。
【0121】
(5) 本実施形態のシステムでは、危険度評価部115(危険度評価手段)は、危険度評価対象区間に関する前記道路情報に基づいた曲率半径Rnと、重心高さh(重心位置関連情報)と、危険度評価位置での車速に基づいた車両に作用する遠心力に基づいて車両の安全限界速度を算出する。又、ディスプレイ150(提示手段)は、前記安全限界速度を提示する。この結果、本実施形態のシステムによれば、この結果、本実施形態によれば、車両が走行する道路の曲率半径に基づいて、危険度評価位置での車速で、車両の重心に作用する遠心力に関する危険度を提示することができる。
【0122】
(6) 本実施形態のシステムでは、危険度評価位置での車両の車速が安全限界速度を超えている場合、ディスプレイ150等(提示手段)が、警報情報を提示する。この結果、運転者に対して、危険度評価位置での車両の車速が、危険度評価位置よりも遠位に位置する危険度評価対象区間での安全限界速度を超えている場合、早期に運転者に警告できるため、早期に運転者は、車速の減速措置を取らせることができる。
【0123】
(第1実施形態の変形)
第1実施形態では、計量台32の水平面32a上に、傾斜ブロックを載置したが、水平面32aを有する水平計量台と、左右幅方向において、いずれか一方に傾斜する傾斜面を有する傾斜計量台との計2台の計量台から計量部30を構成してもよい。この場合、両計量台には、前記実施形態の計量台と同様の個数及び配置で荷重センサをそれぞれ配置するものとする。
【0124】
又、水平計量台には、図7に示すように、「計量台32の測定の変形例」で説明した測距センサS1,S2を、同様に配置する。又、傾斜計量台の傾斜面の傾斜角度をθとする。
【0125】
一方、傾斜計量台には、図6に示すように、車両の載り込み方向とは直交する方向(すなわち、左右方向)において、いずれか一方の片側に測距センサS3を配置する。図6では右側に測距センサS3が配置されている。この測距センサS3と傾斜計量台の右側のロードセル列の中心位置P7までの距離をj1とする。傾斜角度θ、j1は既知の値であり、メモリ53に記憶されている。
【0126】
上記のように構成された計量部30を使用して、車両を計量する場合、車両を水平計量台に載り込ませて、前記図7で説明したことと同様に、各測距センサS1,S2と各タイヤT迄の各距離m1,m2を、測距センサS1,S2により測距するとともに、水平計量台の荷重センサにより、W1,W2を測定する。そして、これらの測定値より、「計量台32の測定の変形例」と同様に前記式(22)〜式(29)から、左右車輪の中心距離bと、左右車輪の中心距離bの中に存在する重心位置xを重量値測定部55aは算出し、これらの算出結果をメモリ53に記憶する。なお、タイヤ幅tは既知とし、メモリ53に記憶されている。
【0127】
次に、傾斜計量台に車両を載り込ませる。この場合は、車両が前記実施形態と同様の傾斜姿勢を取るように載り込ませる。なお、この場合、車両は、前記実施形態で説明した仮想傾斜面A上に位置して傾斜姿勢となることと同様であるため、説明の便宜上、図6を参照して説明する。ここでは、説明の便宜上、Aを単に傾斜面という。
【0128】
上記のようにして、車両を傾斜計量台に載り込ませて、車両の右側の車輪列の中心が、傾斜計量台上で図6に示すように傾斜面A上のP6”の位置に載り込んだとする。この場合、P6”の位置は、下記のように測距センサS3の測定によって、測距センサS3と右側の車輪迄の距離j2が測距される。そして、該距離j2とタイヤ幅tの値に基づいて、重量値測定部55aは、傾斜方向に沿った距離j2+t/2を算出する。又、重量値測定部55aは、下式(38)により、P61P7の距離を算出する。なお、ここでのP61は、傾斜計量台において、前記実施形態のP6”に相当する位置から垂線が降ろされて水平傾斜台の水平面と交差点に掛かる荷重合計値Wbの位置である。
【0129】
j2+t/2=(P61P7/cosθ+j1・cosθ) ……(38)
前記式(38)により、P61P7、すなわち、車両が水平姿勢の場合における右側の車輪列の中心から右側のロードセル列の迄の距離が算出される。
【0130】
又、記憶した左右車輪の中心距離b、重心位置x、及び傾斜計量台で測定されたW1’(傾斜時の左側のロードセル列のロードセルに発生した合計荷重)、W2’(傾斜時の右側のロードセル列のロードセルに発生した合計荷重)、傾斜角度θ,距離a,合計荷重W1,W2,及び総荷重Wtは、地上測定部10から車両走行危険度評価システム100に出力される。
【0131】
上記のように水平計量台と傾斜計量台から計量部30を構成しても、第1実施形態と同様の効果を奏することができる。
(第2実施形態)
次に、第2実施形態を図1(b)、図、9、図10(b)、図13、図14等を主に参照して説明する。本実施形態では、ハードウエア構成が第1実施形態とは下記のように異なっている。
【0132】
第1実施形態では、車両走行危険度評価システム100のCPU111が重心位置情報算出部114の機能を有するようにしたが、本実施形態では、図1(b)に示すように、CPU111の重心位置情報算出部114の機能が省略され、その代わりに地上測定部10の演算制御装置52のCPU55が、重量値測定部55aの他に重心位置情報算出部55bの機能を有する。他の構成は、第1実施形態のハードウエア構成と同一のため、第1実施形態と同一構成については、同一符号を付してその説明を省略する。重心位置情報算出部55bは、重心位置情報算出手段に相当する。
【0133】
そして、本実施形態では、重量値測定部55aにより、第1実施形態と同様に図9のフローチャートで示す処理が行われる。図9に示すフローチャートの処理が終了すると、CPU55(すなわち、重心位置情報算出部55b)は、図13に示すフローチャートのS41での処理を、図示しないCPU55の図示しないROMに記憶された重心高さ算出プログラムを実行することにより重心高さhを算出する。
【0134】
すなわち、CPU55は、図示しないRAMに記憶した合計荷重W1,W2,W1',W2',重心位置x,傾斜角度θ,距離a,bと、前記式(19)〜式(21)、式(9)を使用して重心高さhを算出する。
【0135】
CPU55は算出した重心高さh、重心位置x,傾斜角度θ,距離a,b,合計荷重W1,W2,W1',W2',総荷重Wtを、情報出力手段70、通信ケーブル72、情報入力手段116を介して、車両走行危険度評価システム100に出力する。重心高さh、重心位置x,傾斜角度θ,距離a,b,合計荷重W1,W2,W1',W2',総荷重Wtは、CPU111により、制御回路110のRAM113に記憶される。重心高さh、重心位置x,傾斜角度θ,距離a,b,合計荷重W1,W2,W1',W2',総荷重Wtは重心位置関連情報に相当する。
【0136】
図14のS21及びS22は、制御回路110のROM112に記憶された走行予定経路の設定(探索)プログラムにより、CPU111が行う処理である。このS21、S22の処理は、第1実施形態の図10(a)のS21,S22と同じ処理のため、説明を省略する。S21,S22での探索結果及び設定された走行予定経路に関する道路情報は第1実施形態と同様にRAM113に記憶される。CPU111は、走行予定路設定手段に相当する。
【0137】
そして、運転者により、操作スイッチ群130の操作により危険度評価プログラムが起動されると、該プログラムに従って第1実施形態と同様の図10(b)のフローチャートで示す危険度評価処理を行う。
【0138】
上記のように構成された第2実施形態は、第1実施形態と異なり、車両走行危険度評価システム100の制御回路110に、重心位置情報算出部を備えていなくても、地上測定部10側で、重心高さh等の車両の重心位置関連情報が算出されて、情報入力手段を介して車両走行危険度評価システム100の制御回路110できるため、第1実施形態と同様の効果を奏することができる。
【0139】
なお、本発明の実施形態は前記実施形態に限定されるものではなく、下記のように変更しても良い。
・ 前記各実施形態では、車両の左右の車輪に対応して、左輪用傾斜ブロック、及び右輪用傾斜ブロックを設けた。この代わりに、左右傾斜ブロックを互いに連結するようにして、上記左輪用傾斜ブロック、右輪用傾斜ブロックよりも長い横幅を有する1軸に共通の傾斜ブロックを形成したものを使用してもよい。
【0140】
・ 前記各実施形態では、前記傾斜ブロックは計量台32に対してボルト止め等により、着脱自在にしてもよい。そして、貨物自動車の形式の相違による車輪の配置と対応するように予め前記傾斜ブロックの計量台32の装着位置を、該形式に合わせて複数用意しておき、前記ボルトの締め付け、及び締め付け解除により、該形式に合わせて傾斜ブロックの装着位置を適宜変更できるようにしてもよい。併せて、貨物自動車の車軸数(すなわち、タイヤ数)に併せて、傾斜ブロックの数を増減するように変更してもよい。
【0141】
・ 前記各実施形態では、ロードセルは、ストレインゲージ式の圧縮型起歪部を持つロードセルを使用したが、磁歪式、静電容量型、弦振動式又はジャイロスコープ式のロードセルに変更してもよい。
【0142】
・ 前記計量台に傾斜ブロックを設ける代わりに、計量台上に車両積載面を有する車両積載台を設けるとともに、該車両積載台と計量台間にモータによる電動式昇降装置、或いは油圧ジャッキ等よりなる車両積載面傾斜装置を設けて、前記車両積載面傾斜装置により水平姿勢の計量台上で車両積載台のみを所定の角度に傾斜させる構成としてもよい。この場合、計量台上での車両の車輪位置の測定値及び車両積載面が水平な場合と、所定の角度に車両積載面を傾斜させた場合の計量台の荷重センサの荷重信号の測定値に基づいて車両の重心位置を求めるようにしてもよい。また、車両積載台のみを2種類の所定の角度θ1とθ2に傾斜させる構成としてもよい。この場合、計量台での車両の車輪位置の測定値及び車両積載面が所定の角度θ1の場合とθ2の角度に傾斜させた場合の計量台の荷重センサの荷重信号の測定値に基づいて車両の重心位置を求めるようにしてもよい。
【0143】
・ 第1実施形態及び第2実施形態の計量部30ではデジタル荷重信号を出力するデジタル荷重センサを用いたが、アナログ値を出力するアナログ荷重センサ(ロードセル)を用いてもよい。この場合、演算制御装置52側に、増幅器及びA/D変換器を設けて、アナログ荷重センサのアナログ荷重信号を、対応する増幅器により増幅してA/D変換器によりデジタル荷重信号に変換し、演算制御装置52に入力する。
【0144】
・ 前記各実施形態では、地上測定部10と、車両走行危険度評価システム100との情報の伝達を、有線、無線、或いは、USBメモリを使用するようにしたが、これらに限定するものではなく、磁気カード、ICカード等の可搬情報媒体を利用して行っても良い。この場合、車両走行危険度評価システム100の情報出力手段、及び車両走行危険度評価システム100の情報入力手段としては、前記カードを書き込み、及び読み出し可能なカードリーダとし、前記可搬情報媒体に重量位置関連情報、或いは重心位置関連情報を一旦、地上測定部10のカードリーダで可搬情報媒体に書き込みした後、車両走行危険度評価システム100のカードリーダで読み込みする。
【0145】
・ 図10(b)のS37では、安全限界速度Vnに対して余裕度Dを考慮した1−Dを乗算して、車速Bと比較したが、1−Dを乗算することなく、安全限界速度Vnと車速Bとを比較するようにしてもよい。
【0146】
・ 前記実施形態では、計量部30で計量される車両は、全輪数×駆動輪数=6×2で、かつ前1軸、後2軸である貨物自動車(ワンデフ車)の計量が可能になっているが、傾斜ブロックの配置位置や、ブロック数は車種の仕様に併せて新たに着脱して変更してもよい。
【0147】
又、駆動車200(トラクター)と荷台車300(トレーラ)からなる貨物車両の場合、図15(a)、(b)に示すようにして計量してもよい。図15(a)は、計量台32の水平面32a上に荷台車300を積載した状態とする。このとき、駆動車200は、計量台32上には積載されず、計量台32の水平面32aと同じ高さの地表面上に位置させる。次に、図15(b)に示すように、荷台車300の第1軸〜第3軸のタイヤTをそれぞれ、傾斜ブロック36A〜36C、傾斜ブロック37A〜37C上の上面に載せた状態にする。なお、説明の便宜上、図15(a)、(b)では、傾斜ブロック36A〜36Cのみ図示されている。
【0148】
・ 又、図16に示すように、駆動車200と荷台車300の全体を計量する場合は、駆動車200と、荷台車300とが連結された状態で、積載可能な水平面32aを有する計量台32としてもよい。この場合、図16に示すように、例えば、計量台32の長手方向の中央部にさらに、長手方向とは直交する方向に、第5荷重センサLC5及び第6荷重センサLC6を配置するものとする。第5荷重センサLC5、第6荷重センサLC6の構造は、第1荷重センサLC1と同一構成とする。
【0149】
又、図16の計量台32では、駆動車200の前輪(タイヤ)と後輪(タイヤ)とが、傾斜ブロック36A、37A、36B、37Bに載ることができるように配置され、荷台車300の第1軸のタイヤTが傾斜ブロック36C、37C、36D、37D、36E、37Eに載ることができるように配置されている。なお、説明の便宜上、図16では、傾斜ブロック36A〜36Eのみ図示されている。
【0150】
・ 第1実施形態、及び第2実施形態の地上測定部10の構成は、例示であり、車両の重量が測定でき、車両の重心位置関連情報を生成できるものであれば限定されるものではない。
【符号の説明】
【0151】
100…車両走行危険度評価システム、
111…CPU(走行予定路設定手段、危険度評価位置設定手段)、
114…重心位置情報算出部、
115…危険度評価部(危険度評価手段)、116…情報入力手段、
120…位置検出器(現在位置取得手段)、
126…車速センサ(車速取得手段)、
140…外部記憶装置(道路情報記憶手段)、
150…ディスプレイ(提示手段)。
【技術分野】
【0001】
本発明は、走行予定経路上の危険度評価位置で車速を取得し、前記危険度評価位置よりも先行き方向に位置する危険度評価対象区間において前記車速で走行した場合の車両の危険度を評価し、その評価結果を運転者に提示する車両走行危険度評価システムに関する。
【背景技術】
【0002】
近年、車両、特に貨物自動車が走行中に横転して大事故を起こすケースがしばしば発生している。
積荷の位置及び重量の関係で、貨物自動車或いは貨物自動車の牽引車両(トラクタ)が牽引する荷台車(トレーラ)の重心が高く、しかも重心位置が左右の車輪列ラインのいずれかの方向に偏り過ぎていると低速走行時でも遠心力の作用によって曲路で貨物自動車の車両全体或いは荷台車が傾き、横転する可能性が高くなる。
【0003】
事故防止の上で貨物自動車或いは貨物自動車が牽引する荷台車の重心位置の高さや偏りを測定し、走行中の車両の傾斜、速度に基づいて危険度を評価・判定し、運転者に警報することは極めて重要である。
【0004】
特許文献1には、車両の荷台を支持する荷重センサにより、荷台の自重と該荷台に積載される荷物重量に対する荷重センサの重量測定値から荷台としての重心位置を算出して車両走行時の危険度を評価・判定することが開示されている。
【0005】
又、特許文献2の荷重検出装置も公知である。前記荷重検出装置は、傾動台の一端が回動自在に支持されるとともに前記傾動台の他端が上下可能に支持する上下動機構に連結されている。前記傾動台上には複数の荷重計(荷重センサ)に支持された載荷盤が設けられている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−97072号公報
【特許文献2】特開昭57−189022号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1では、車両の傾斜による転倒の危険性を評価するには、車両全体の重心位置を検出することによって可能になる。しかし、特許文献1では、曲路を走行する時の危険度を評価する構成については開示がない。
【0008】
特許文献2では、荷重検出装置を、車両の外部に設けて、該荷重検出装置に装備された荷重センサによる重量測定値を求めても、車両へ伝達する手段がないと、前記車両が走行中に重心位置情報を利用して走行状態における危険度評価はできない問題がある。なお、特許文献2は、この点については開示及び示唆はされていない。
【0009】
本発明の目的は、車両が道路の曲路を走行するとき、車両の重心位置に作用する遠心力の大きさと重心位置情報による車両の転倒危険性の評価を行うことができ、常に走行予定経路に沿って現在走行している位置より先行きの道路事情に応じた危険度評価を予め前もって運転者に提示することができる車両走行危険度評価システムを提供することにある。
【課題を解決するための手段】
【0010】
上記問題点を解決するために、請求項1の発明は、道路情報を記憶する道路情報記憶手段と、車両の現在位置を取得する現在位置取得手段と、前記現在位置から目的地までの走行予定経路を、付与された探索条件の下で前記道路情報に基づいて設定する走行予定路設定手段と、前記車両の重心位置関連情報を取得する情報入力手段と、前記車両の車速を取得する車速取得手段と、前記走行予定経路上において、前記現在位置から先行き方向に位置する危険度評価位置を設定する危険度評価位置設定手段と、前記車両が前記設定された危険度評価位置に到達した際に、前記走行予定経路上であって、当該危険度評価位置よりも先行き方向に離間した危険度評価対象区間に対して、該危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、前記重心位置関連情報と、前記危険度評価位置での車速に基づき、前記車両の危険度を評価する危険度評価手段と、前記危険度評価手段の評価結果を提示する提示手段を備えたことを特徴とする車両走行危険度評価システムを要旨としている。
【0011】
請求項2の発明は、請求項1において、前記危険度評価手段は、前記車両が前記設定された危険度評価位置に到達した際の車速が速くなるほど、或いは、前記危険度評価位置に到達した際の車速と、前記重心位置関連情報から得られる前記車両の運動量が大きいほど、前記危険度評価位置からの離間距離を長くした危険度評価対象区間に対して危険度を評価することを特徴とする。
【0012】
請求項3の発明は、請求項1又は請求項2において、前記危険度評価位置設定手段は、前記危険度評価位置を先行き方向に複数設定し、前記危険度評価手段は、順次前記危険度評価位置に車両が達する毎に、各危険度評価位置と所定距離離間した前記危険度評価対象区間における前記車両の危険度の評価を行うことを特徴とする。
【0013】
請求項4の発明は、請求項3において、前記危険度評価手段は、前記危険度評価位置に前記車両が達する度に、前記車両の危険度の評価が行われた前回の危険度評価対象区間と、一部が重なる新たな危険度評価対象区間において、前記車両の危険度を評価することを特徴とする。
【0014】
請求項5の発明は、請求項1乃至請求項4のうちいずれか1項において、前記危険度評価手段は、前記危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、前記重心位置関連情報と、前記危険度評価位置での車速に基づいた前記車両に作用する遠心力に基づいて前記車両の安全限界速度を算出し、前記提示手段は、前記安全限界速度を提示することを特徴とする。
【0015】
請求項6の発明は、請求項5において、前記提示手段は、前記危険度評価位置の車速が前記安全限界速度を超えている場合、警報情報を提示することを特徴とする。
なお、本明細書において、車両とは、例えば、乗用車、貨物自動車等を含み、貨物自動車では、駆動車が荷台と一体となったいわゆるトラック(タンクローリ車を含む)、駆動車(トラクタ)と前記駆動車に牽引された荷台車(トレーラ:セミトレーラ、フルトレーラを含む)、前記荷台車単体、駆動車(トラクタ)単体等を含む趣旨である。又、車両の重量とは、当該車両のみならず車両が積載する物(積載物)の重量を含む趣旨である。
【発明の効果】
【0016】
本発明によれば、車両が道路の曲路を走行するとき、車両の重心位置に作用する遠心力の大きさと重心位置情報による車両の転倒危険性の評価を行うことができ、常に走行予定経路に沿って現在走行している位置より先行きの道路事情に応じた危険度評価、警報と安全限界速度を予め前もって運転者に提示することができる。
【図面の簡単な説明】
【0017】
【図1】(a)は、本発明を具体化した第1実施形態の計量部と車両走行危険度評価システムのブロック図、(b)は、他の実施形態の計量部と車両走行危険度評価システムのブロック図。
【図2】(a)は計量台の側面図、(b)は計量台の平面図、(c)は傾斜ブロックの説明図。
【図3】計量台の使用の説明図。
【図4】計量台の説明図。
【図5】計量台の傾斜ブロックの説明図。
【図6】重心位置の説明図。
【図7】重心位置の説明図。
【図8】重量値測定装置50の電気ブロック図。
【図9】重量位置関連情報の生成フローチャート。
【図10】(a)は、第1実施形態の走行予定経路の設定処理が行われた場合の例を示すフローチャート、(b)は、危険度評価のフローチャート。
【図11】(a)は、走行予定経路上の現在位置、危険度評価位置、先行き区間、危険度評価対象区間の説明図、(b)は好ましくない危険度評価対象区間の設定の場合の説明図。
【図12】車両が左カーブの曲路を走行する場合の重心に働く遠心力の説明図。
【図13】第2実施形態の重心高さの算出のフローチャート。
【図14】第2実施形態の走行予定経路の設定処理が行われた場合の例を示すフローチャート。
【図15】(a)は荷台車が計量台上で水平姿勢となった場合の説明図、(b)は、荷台車が荷台車が傾斜ブロックに載った場合の説明図。
【図16】駆動車(トラクタ)と荷台車(トレーラ)が計量台に載った場合の説明図。
【発明を実施するための形態】
【0018】
(第1実施形態)
以下、本発明を具体化した第1実施形態の車両走行危険度評価システム100を、図1(a)、図2〜図6、図8〜図10を参照して説明する。
【0019】
図1(a)には、車両の重量を計量する地上測定部10と、車両走行危険度評価システム100が図示されている。
(地上測定部10)
地上測定部10は、地表面上に設置されており、計量部30と、重量値測定装置50と、車両走行危険度評価システム100に対して、各種情報を通信で送信する情報出力手段70とを備えている。
【0020】
(計量部30)
計量部30を図2〜5を参照して説明する。
計量部30を構成する計量台32は、図2に示すように、地表の基礎面34(すなわち、地表面)に対して第1荷重センサLC1〜第4荷重センサLC4を介して支持されている。計量台32は、車両が載ることのできる平面視したとき四角形の板状部材で構成されている。基礎面34は、通常、地面に敷設されたコンクリートにより形成されている。
【0021】
第1荷重センサLC1〜第4荷重センサLC4は、例えばストレインゲージ式で圧縮型起歪部を持つロードセルからなる。第1荷重センサLC1〜第4荷重センサLC4は、図2(a)、(b)、図3に示すように前記計量台32の4隅に配置されている。すなわち、第1荷重センサLC1は、計量台32における車両前進走行経路下流側の左角部を下側から支持することができるように配置されている。第2荷重センサLC2は、計量台32における車両前進走行経路上流側の左角部を下側から支持することができるように配置されている。第3荷重センサLC3は、計量台32における車両前進走行経路上流側の右角部を下側から支持することができるように配置されている。第4荷重センサLC4は、計量台32における車両前進走行経路下流側の右角部を下側から支持することができるように配置されている。
【0022】
第1荷重センサLC1〜第4荷重センサLC4は、上方に位置する計量台32からの荷重を受ける荷重受け部35a、及び基礎面34からの反力荷重を受ける反力荷重受け部35bを有する。前記荷重受け部35a及び反力荷重受け部35bは、球面形状をなす凸部に構成されている。
【0023】
なお、図2(a)では、図示は省略されているが、計量台32、及び基礎面34には、前記荷重受け部35a及び反力荷重受け部35bの各凸部に当接するように設けられた荷重受け金具が設けられている。すなわち、各荷重受け金具の荷重受け面と第1荷重センサLC1〜第4荷重センサLC4の荷重受け部35a、及び反力荷重受け部35bの各凸部とは水平方向に可動自由に接触している。第1荷重センサLC1〜第4荷重センサLC4の動きは計量台32に拘束されないようにして計量台32の撓みによる横向き方向(水平方向)の荷重の影響を受けにくい構造とされている。
【0024】
なお、本実施形態では、前記荷重センサは、車両の進行方向に向かって左右に2列、合計4個によって計量台32の4隅を支持したが、荷重センサの数は4個に限定されるものではない。車両の進行方向に向かって左右に2個ずつの代わりに、3個、又は4個で、合計6個又は8個、或いは、それ以上の個数の荷重センサにより計量台32を支持するようにしてもよい。なお、進行方向を先行き方向ということがある。
【0025】
(計量台32の効果)
上記のように第1荷重センサLC1〜第4荷重センサLC4は、高精度計量を可能にするために、前記基礎面34に対して設置することにより、荷重センサの設置位置が変化することなく、第1荷重センサLC1〜第4荷重センサLC4の荷重受け部35aと計量台32とは可動自由に接触する構造となっている。このため、第1荷重センサLC1〜第4荷重センサLC4が支持する計量台32は、常に水平姿勢であって、該計量台32に設けられた後述する傾斜ブロックによって車両に傾斜を与えることにより車両の重心位置が測定できる。
【0026】
図2(a)〜(c)に示すように、計量台32の車両を積載する水平面32aには、左輪用傾斜ブロック36A〜36C、及び右輪用傾斜ブロック37A〜37Cが車両、例えば貨物自動車の車軸数、大きさ等の仕様に合わせて装着されている。すなわち、左輪用傾斜ブロック、及び右輪用傾斜ブロックを左右一対を一組としたとき、車軸数の数に一致した組数が、計量台32の車両を積載する水平面32aに装着されている。例えば、2〜4軸の場合は、それぞれ2〜4組の傾斜ブロックが装着されている。本実施形態では、全輪数×駆動輪数=6×2で、かつ前1軸、後2軸である貨物自動車(ワンデフ車)の計量が可能に前記ブロックが配置されている。
【0027】
各傾斜ブロック36A〜36C、37A〜37Cの上面は、前記貨物自動車のタイヤ(車輪)が載ることができる面積を有するとともに、車両の進行方向に対して直角の方向において、図2(c)に示すように所定の傾斜角度θを有するように形成されている。すなわち、本実施形態では、図5に示すように、車両の左右の車輪が左輪用傾斜ブロック36A〜36C、及び右輪用傾斜ブロック37A〜37Cにそれぞれ載った際に、右に傾くように計量台32の車両を積載する平面に対してθをなす仮想傾斜面に、各傾斜ブロックの上面が傾斜している。なお、本実施形態では、車両が右に傾くように各傾斜ブロックの上面を傾斜しているが、車両が左に傾くように各傾斜ブロックの上面を傾斜させてもよい。
【0028】
図2(b)において、L1は、ワンデフ車の貨物自動車において、前から数えて第1軸と第2軸の軸間距離であり、L2は第2軸と第3軸の軸間距離である。L3は、左右車輪の中心距離である。L4は、車両の進行方向に向かって左右に配置した荷重センサLC1・LC4間、及び荷重センサLC2・LC3間の距離である。各傾斜ブロック36A〜36C、37A〜37Cの上面の車両の進行方向に直交する幅寸法L5(横幅)は、後輪のダブル構成のタイヤ幅よりも長い寸法としている。又、図2(b)に示すように、各傾斜ブロックの上面の車両の進行方向の長さ寸法L6は、車両のタイヤの路面接地寸法にほぼ等しい程度の長さにしている。
【0029】
上記のように、貨物自動車の車軸数、大きさ等の仕様に合わせて各傾斜ブロックが計量台32に対して装着されている。
又、各傾斜ブロックは、測定対象である車両の全てのタイヤT(車輪)が、図2(a)の実線で示すように傾斜ブロック上に載らない状態(すなわち、車両が水平姿勢の状態)では、前記傾斜ブロックに触れない状態を取ることができるように傾斜ブロックが配置されている。そして、車両が前記水平姿勢から、少し進行方向に移動して傾斜ブロックの上面に載りこみした場合、車両が前記傾斜角度θで傾斜姿勢をとることが可能となっている。又、図3に示すように計量台32の水平面32a及び左輪用傾斜ブロック36A〜36Cの上面には、車両の進行方向に沿って左ライン40Lが、水平面32a及び右輪用傾斜ブロック37A〜37Cの上面には、右ライン40Rが互いに平行にペンキ等により描かれている。
【0030】
(荷重センサの概略説明)
図8に示すように、第1荷重センサLC1〜第4荷重センサLC4の各ロードセルは、4枚の歪ゲージからなるホイートストンブリッジ回路20を備えている。ホイートストンブリッジ回路20には、直流電源電圧が印加されている。ホイートストンブリッジ回路20は、荷重センサに一体に組み込まれた増幅器22、アナログ・デジタル変換器(A/D変換器)24を介して演算制御装置52に接続されている。すなわち、ホイートストンブリッジ回路20は、歪ゲージが検出した歪み量に応じたアナログ荷重信号を出力し、このアナログ荷重信号は、増幅器22により増幅されてA/D変換器24によりデジタル荷重信号に変換され、重量値測定装置50の演算制御装置52に入力される。このように、第1荷重センサLC1〜第4荷重センサLC4は、デジタル荷重信号を出力するデジタル荷重センサである。
【0031】
(重量値測定装置50の概略説明)
図8に示すように重量値測定装置50は、演算制御装置52と、操作装置54と、表示装置56とを備えている。
【0032】
演算制御装置52は、主として、I/O(インターフェイス)回路51と、メモリ53と、中央演算処理装置(CPU)55とにより構成されている。
I/O回路51は、第1荷重センサLC1〜第4荷重センサLC4のA/D変換器24と、操作装置54と、表示装置56と、メモリ53と、CPU55との間で各種の信号やデータの受け渡しを行う機能を有している。
【0033】
メモリ53は、ROMやRAMなどで構成され、所定プログラムや基本データなどを長期的に記憶したり、種々のデータや演算用数値などを一時的に記憶したりする機能を有している。CPU55は、メモリ53に格納されている所定プログラムの指示に従って、必要な信号をI/O回路51を介して受け取り、また必要なデータをメモリ53から受け取り、受け取った信号やデータに基づいて演算を実行する機能を有している。
【0034】
操作装置54は、操作スイッチや数値キーなどを備えてなり、測定開始・終了の動作や零点調整動作、使用モードの切り換え動作、数値設定動作などの種々の動作の際に用いられる。表示装置56は、例えば液晶ディスプレイからなり、測定結果や各種データの入出力画面などが表示される。
【0035】
(重量値測定装置50の制御系システムの処理動作の概略説明)
重量値測定装置50の制御系システムにおいては、計量部30における第1荷重センサLC1〜第4荷重センサLC4の荷重信号が、I/O回路51を経由してCPU55に送られる。CPU55は、メモリ53に格納されている重量測定プログラム等の所定プログラムに従って、I/O回路51からの信号を取り込み、またメモリ53に記憶されている種々のデータを読み込み、これらの信号やデータに基づいて車両の重量、及び重心位置を含む重量位置関連情報の生成を実行する。そして、その生成結果(重量位置関連情報)は表示装置56に表示されるとともに情報出力手段70を介して、車両走行危険度評価システム100に出力される。
【0036】
(情報出力手段70の概略説明)
情報出力手段70は、I/Oインターフェイスであり、車両走行危険度評価システム100に対して重量位置関連情報を含む各種情報を送信可能である。情報出力手段70は、具体的には、車両走行危険度評価システム100に対し有線接続する場合には、通信ケーブル72(例えば、USBケーブル、イーサネット(登録商標)ケーブル等)を、取り外し可能に接続する。そして、前記ケーブルにより車両走行危険度評価システム100に設けられた情報入力手段116としてのI/Oインターフェイスに接続される。なお、USBケーブルを接続する代わりに、I/Oインターフェイスに設けられるUSBポートにUSBメモリを接続して、重量位置関連情報を含む各種情報を、情報出力手段70と車両走行危険度評価システム100との間でやりとりしてもよい。
【0037】
なお、無線接続の場合、例えば、無線LANにより接続する場合、情報出力手段70としての無線LANインターフェイスを介して行い、車両走行危険度評価システム100に設けられた情報入力手段としての無線LANインターフェイスとデータ通信が行われる。
【0038】
(演算制御装置52の機能説明)
演算制御装置52においては、重量測定プログラムがCPU55で実行されることにより、図1(a)に示される重量値測定部55aの機能、すなわち、重量位置関連情報の生成機能が実現される。重量値測定部55aは重量測定手段に相当する。
【0039】
(車両走行危険度評価システム100の構成の説明)
次に車両走行危険度評価システム100を図1(a)を参照して説明する。
車両走行危険度評価システム100は、例えば、計量対象物の車両、或いは、計量対象物のコンテナを運搬する車両(トレーラ)に搭載されるものである。車両走行危険度評価システム100は、制御回路110と、位置検出器120と、操作スイッチ群130と、外部記憶装置140、ディスプレイ150及び音声合成回路(図示しない)を介して接続されたスピーカ(図示しない)を備えている。ディスプレイ150及び音声合成回路(図示しない)を介して接続されたスピーカ(図示しない)は、提示手段に相当する。制御回路110は、コンピュータとして構成されるとともに、CPU111、ROM112、RAM113を有する。なお、ROM112は、書き込み可能な不揮発性メモリからなる。
【0040】
制御回路110は、本実施形態では、カーナビゲーション装置(以下、単にカーナビという)の制御回路として構成されているが、カーナビに限定されるものではない。なお、カーナビは、車両に固定されるものに限らず、車両から着脱自在に取付けできるもの、或いは、人が車両に持ち込み、持ち出し可能なポータブルのものも含む趣旨である。前記制御回路110内のROM112には、地図表示機能、経路演算機能、経路案内機能等のナビゲーションの機能を実現するためのソフトウェア、走行予定経路の設定及び重心高さ算出プログラム、危険度評価プログラム等、各種ソフトウェアがインストールされている。
【0041】
位置検出器120は、地磁気センサ121、ジャイロスコープ122、距離センサ123、及びGPS受信機124を含む構成となっている。前記地磁気センサ121は、地磁気を検出することにより、車両の進行方向を検出する。ジャイロスコープ122は、車両の旋回状態を検出する。距離センサ123は、車両の走行距離を検出する。GPS受信機124は、GPS(Global Positioning System)衛星からの電波を受信して、車両の現在位置を緯度及び経度に基づいて検出する。
【0042】
前記地磁気センサ121、ジャイロスコープ122、GPS受信機124により自立航法が可能となっている。又、GPS受信機124と自立航法とにより、それぞれの短所を補う。例えば、位置検出器120では、GPS受信機124が検出した緯度・経度の情報を基準に、地磁気センサ121、ジャイロスコープ122、距離センサ123の検出した結果を加味した補正を行うことにより、車両の現在位置を正確に検出することができる。操作スイッチ群130は、例えば、地図の表示切り換え、拡大表示、縮小表示を指示したり、スクロールを指示したり、経路計算のための目的地を入力するといった各種操作を実行するためのスイッチ類を備える。
【0043】
外部記憶装置140は、例えば、ハードディスクが代表的である。外部記憶装置140は、CD或いはDVD読み取り装置であってもよい。この外部記憶装置140は、例えばハードディスクの場合、該ハードディスクに地図データである道路マップがデータベース化されている。外部記憶装置140は、道路マップデータベースを構成している。
【0044】
又、外部記憶装置140は、地名や施設名とその緯度・経度座標とを対応付けたデータ等を記憶しておくことにより、経路計算の際の目的地の選択を容易にするためにも利用される。ディスプレイ150は、例えば、カラー液晶表示装置であるが、限定するものではない。
【0045】
(地図データの説明)
地図データは、例えば、道路地図をディスプレイ150にグラフィック表示するための道路地図データと、経路探索に必要な一方通行や車両通行禁止などの交通規制データ、各地点の所在地データ、目的地検索や地点登録のために必要な登録地点データを含む。
【0046】
又、地図データには、経路探索において出発地から目的地までの所要時間を算出するために必要な次のデータ、すなわち、道路情報が含まれている。例えば、道路地図上の所定の道路区間毎に道路区間IDが付され、各道路区間に対して、道路種別(例えば高速道路、国道、県道、市道、農道など)、道路属性(その道路区間が特定の道路、例えば国道n号線に属しているなどの関係付け)、道路区間距離(その道路区間の長さ)、ノード座標(その道路区間の始点と終点の緯度経度座標、交差点等の特徴的な地点)、道路区間旅行時間(その道路区間を走行するのに要する時間)などの道路区間データを含む。
【0047】
さらに、地図データ、すなわち、道路情報には、前記道路区間に存在する各カーブの緯度、経度、その曲率半径、道路横断勾配、及びそのカーブの地点名称等を含む。前記各カーブの緯度、経度には、そのカーブの入口位置の緯度、経度から、出口位置の緯度、経度、及び、前記入口位置から出口位置間(すなわち、カーブ中)における所定間隔毎の道路の緯度、経度を含む。
【0048】
又、本実施形態では、カーブは、地図データにおいて、曲率半径が付与された箇所のものをいう。
外部記憶装置140は道路情報を記憶する道路情報記憶手段に相当する。
【0049】
(情報入力手段116の概略説明)
情報入力手段116は、I/Oインターフェイスであり、地上測定部10の計量部30により計量対象物の車両の重量を測定する際に、車両走行危険度評価システム100は、地上測定部10に対して接続される。接続方法は、前述したように有線接続でもよいし、或いは、無線接続であってもよい。有線接続の場合は、通信ケーブル72を、車両走行危険度評価システム100に設けられている情報入力手段116としてのI/Oインターフェイスに接続可能である。なお、USBケーブルを接続する代わりに、USBポートにUSBメモリを接続して、データをやりとりしてもよい。
【0050】
なお、無線接続の場合、例えば、無線LANにより接続する場合、情報入力手段116としての無線LANインターフェイスを介して地上測定部10の無線LANインターフェイスとデータ通信が行われる。
【0051】
(車速センサ126、傾斜センサ128の概略説明)
車両走行危険度評価システム100の制御回路110には、車両の速度を検出する車速センサ126が接続されている。又、制御回路110には、車両の進行方向に向かって左右の車両傾斜角度θsを検出する傾斜センサ128が接続されている。傾斜センサ128は、車両傾斜角度θsを制御回路110に出力する。本実施形態では、傾斜センサ128は、車両の状態である車両状態情報としての車両傾斜角度θsを測定して生成する車両状態測定手段及び車両傾斜角度測定手段に相当する。傾斜センサ128は、車両が走行中及び停止中の場合も、車両の傾斜状態を示す車両傾斜角度θsの検出が可能である。
【0052】
(制御回路110の重心位置情報に関する処理動作の概略説明)
制御回路110のCPU111は、ROM112に格納されている重心高さ及び安全傾斜限界角度算出プログラムに従って重量値測定装置50から送られた重量位置関連情報に基づいて、重心高さhの演算を実行する。このようにして、CPU111は、重心位置情報算出部114、及び危険度評価部115の機能を実現する。重心位置情報算出部114(すなわち、CPU111)は、重心位置情報算出手段に相当する。危険度評価部115(すなわち、CPU111)は、危険度評価手段に相当する。又、CPU111は、
<車両の重心位置x及び重心高さhの求め方の理論説明>
車両の重心Gの位置(重心位置ともいう)x及び重心高さhは、車両を計量台32の水平面32aに水平姿勢となった状態で複数の荷重センサにより測定された値と、傾斜ブロック(傾斜ブロックは、この欄では、説明の便宜上、右輪用傾斜ブロック、左輪用傾斜ブロックブロックの両者を含む趣旨で使用する。)に車両を載せて傾斜姿勢となった状態で複数の荷重センサにより測定された値と、傾斜角度θに基づいて求める。
<車両の水平姿勢での記号の定義(車両、計量台関連)の説明、及び式の説明>
図4、図6及び下記理論式で用いる記号の意味を下記のとおり定義する。
【0053】
G:水平姿勢の車両の重心
L1:第1軸と第2軸の軸間距離
L2:第2軸と第3軸の軸間距離
L3:左右車輪の中心距離
L4:荷重センサLC1・LC4間、及び荷重センサLC2・LC3間の距離
L5:傾斜ブロック上面の車両の進行方向に直交する幅寸法
L6:傾斜ブロックの上面の車両の進行方向の長さ寸法
t:車輪幅(タイヤ幅)
a:第1荷重センサLC1(第2荷重センサLC2)の中心点と水平面32a上の第1〜3車軸の左側の車輪列の中心点(作用点)との距離、並びに第3荷重センサLC3(第4荷重センサLC4)の中心点と水平面32a上の第1〜3車軸の右側の車輪列の中心点(作用点)との距離
θ :傾斜ブロックの上面の傾斜角度
P0:水平面32a(又は道路面)上の左側の車輪列の中心点(作用点)
P1:重心Gから垂線を降ろしたときの水平面32aとの交点
P6:水平面32a(又は道路面)上における右側の車輪列の中心点(点)
なお、上記記号のうち、L1〜L6、θ、a,tは既知の値であり、これらの値は予めメモリ53、操作装置54の数値キー等の入力操作により記憶されている。
【0054】
<記号の定義(力学関連)の説明>
W11:左側のロードセル列の第1荷重センサLC1(ロードセル)の荷重の測定値
W12:左側のロードセル列の第2荷重センサLC2(ロードセル)の荷重の測定値
W21:右側のロードセル列の第3荷重センサLC3(ロードセル)の荷重の測定値
W22:右側のロードセル列の第4荷重センサLC4(ロードセル)の荷重の測定値
W1:左側のロードセル列のロードセルに発生した合計荷重
W2:右側のロードセル列のロードセルに発生した合計荷重
Wa:3軸の左側の車輪列の合計荷重
Wb:3軸の右側の車輪列の合計荷重
Wt:総荷重
x:車両の幅方向において、水平面32a上に垂直に投射した重心Gの点P1と、水平面32a上の左車輪重の中心点(作用点)P0との距離、すなわち、車両の重心位置
図4に示すように、水平面32a上の左車輪重の作用点(すなわち、左側の車輪列の中心点)、及び右側の車輪列の中心点の計量台32の水平面32a上における点をそれぞれP0,P6とすると、左右のロードセル列の設置間隔L4は、既知であり、左右の車輪間隔(左右車輪の中心距離)L3(=b)も既知である。P0から左側のロードセル列迄の距離、及びP6から右側のロードセル列迄の距離も既知の値a=(1/2)・(L4−b)となるように構成されている。
【0055】
上記W1,W2,W11,W12,W21,W22,Wtは、下記式(1)〜式(3)が成立する。
W1=W11+W12 ……(1)
W2=W21+W22 ……(2)
Wt=W1+W2 ……(3)
W1とW2の荷重測定値、3軸の左側の車輪列の合計荷重Wa,3軸の右側の車輪列の合計荷重Wb、距離a,距離b,車両の重心位置xには、下記式(4)〜式(6)が成立する。式(4)〜式(6)に基づいて、Wa,Wbを消去すると、車両の重心位置xは下記式(7)で求めることができる。
【0056】
Wa+Wb=W1+W2 ……(4)
Wa・x=Wb・(b−x) ……(5)
(a+x)・W1=(b−x+a)・W2=(a+b−x)・W2……(6)
x={(W2−W1)・a+b・W2}/(W1+W2) ……(7)
<車両の傾斜姿勢での記号の定義(車両、計量台関連)の説明、及び式の説明>
図6及び下記理論式で用いる記号の意味を下記のとおり定義する。
【0057】
A :傾斜ブロックにより形成されて、車両が積載される仮想傾斜面(水平面32aが傾斜角度θで傾斜したと同じ面)
G’ :傾斜角度θで傾斜した車両の重心
P0’ :P0から垂線を立てたときの仮想傾斜面Aとの交点
P0”:傾斜角度θで傾斜したときの左側の車輪列の中心点(作用点)
P01 :P0”に掛かる合計荷重Waの水平面32a上の位置
P1 :重心Gから水平面32aに垂直に投射したときの交点
P2 :重心G’から垂線を降ろしたとき仮想傾斜面Aとの交点
P3 :重心G’から水平面32aに垂線を降ろしたときの仮想傾斜面Aとの交点
P5 :重心G’から水平面32aに垂線を降ろしたときの水平面32aとの交点
P6’ :P6から垂線を立てたときの仮想傾斜面Aとの交点
P6”:傾斜角度θで傾斜したときの右側の車輪列の中心点(作用点)
P61 :P6”に掛かる荷重合計値Wbの水平面32a上の位置
h :水平面32aからの重心Gの高さ(重心高さ)
<記号の定義(力学関連)の説明>
W11’:傾斜時の左側のロードセル列の第1荷重センサLC1の荷重の測定値
W12’:傾斜時の左側のロードセル列の第2荷重センサLC2の荷重の測定値
W21’:傾斜時の右側のロードセル列の第3荷重センサLC3の荷重の測定値
W22’:傾斜時の右側のロードセル列の第4荷重センサLC4の荷重の測定値
W1’:傾斜時の左側のロードセル列のロードセルに発生した合計荷重
W2’:傾斜時の右側のロードセル列のロードセルに発生した合計荷重
図6に示すように、車両を傾斜ブロックに載せたときの傾斜ブロック上での左右の車輪の中心位置をP0”、P6”としたとき、P0”・P6”間の距離は、P0”・P6”=bである。傾斜ブロック上のそれぞれP0”、P6”に車輪中心位置に掛かる左側及び右側の車輪列の合計荷重Wa,Wbの位置は、計量台32の水平面32a上では、図6に示すようにP01,P61になる。
【0058】
水平面32a上のP0,P6からそれぞれ立てられた垂線と仮想傾斜面Aとが交わる点を交点P0’,P6’としたとき、交点P0’,P6’間の距離は、下記式(8)で求めることができる。
【0059】
P0’P6’=P0P6/cosθ=b/cosθ(>b) ……(8)
ここで車両は、P0’P6’とP0P6(=b)の差の1/2ずつに等しく振り分けて傾斜ブロック上に載り込んだとし、P0’P0”、及びP6’P6”の距離をcと置き、
c=P0’P0”=P6’P6”=(b/2)・(1/cosθ−1)……(9)
とする。
【0060】
なお、ここでは、式(9)としているが。式(10)とした計算法でもよい。
P0’P0”=0 ……(10)
P6’P6”=b(1/cosθ−1) ……(11)
いずれであっても、P0’P0’及びP6’P6”の値はa、b、hに比べて小さい値であるように車輪は傾斜ブロック上に載り込むものとする。
【0061】
水平姿勢の車両において、計量台32の水平面32aでの重心位置であるP1は、車両が傾斜ブロック上に載り込むことによって形成される仮想傾斜面A上では、P2の位置に対応する。ここで、P0P1=P0”P2=xである。
【0062】
P2から仮想傾斜面A上に垂線を立てると、該垂線上において、P2からhの距離に、傾斜姿勢の車両における重心G’が存在する。
重心G’から計量台32の水平面32a上に垂線をおろした点P5が、車両が傾斜することにより重心Gが計量台32を水平方向に移動した点である。この垂線と仮想傾斜面Aとの交点をP3とすると、
P2P3=h・tanθ ……(12)
P3P6”=b−(x+h・tanθ) ……(13)
である。
【0063】
P0”とP6”の点にて車両からの合計荷重Wa,Wbがそれぞれ計量台32上の水平方向に対して垂直に負荷され、計量台32上の水平方向ではそれぞれP01、P61に負荷される。このため、車両が傾斜ブロック上に載り込むことにより、左側のロードセル列の第1荷重センサLC1、第2荷重センサLC2に発生した積載荷重W11’、W12’の合計荷重W1’は下記式(14)で求まる。又、右側のロードセル列の第3荷重センサLC3、第4荷重センサLC4に発生した積載荷重W21’、W22’の合計荷重W2’は、下記式(15)で求まる。
【0064】
W1’=W11’+W12’ ……(14)
W2’=W21’+W22’ ……(15)
又、
Wa+Wb=W1’+W2’ ……(16)
Wa・y・cosθ=Wb・(b−y)・cosθ ……(17)
{a+(c+y)・cosθ}・W1’={a+(c+b−y)・cosθ}・W2’ ……(18)
より、Wa、Wbを消去することにより、重心Gの計量台32の水平面32aからの重心高さhを、
h=(1/tanθ)・{(Q/cosθ)−(c+x)} ……(19)
と算出できる。
【0065】
ただし、式(17)、式(18)中のy、及び式(19)中のQは、下記のように定義される。
y=x+h・tanθ ……(20)
Q=
{(W2’−W1’)・(a+c・cosθ)+b・cosθ・W2’}/(W1’+W2’)) ……(21)
(計量台32の測定の変形例)
上記は、左右車輪の中心間隔がL3=bとして既知の車種が検査対象であって、車輪載り込み位置の詳細が指定され、所定の車種の計量台及び傾斜ブロック上の所定位置に載り込ませた場合である。車両が計量台32の位置に載り込ませることが難しい場合、下記のように計量部30を構成してもよい。
【0066】
図7に示すように、計量台32の左右の幅方向中心から対称にL7=rの間隔であるとともに、左右の荷重センサの荷重負荷の支持中心からの距離がr1の地表面の位置に距離測定のための測距センサS1,S2が設置されている。測距センサS1,S2は、超音波センサ、レーザ距離計や、或いは、ステレオカメラから構成される。ステレオカメラの場合には、該ステレオカメラが撮像した画像が図示しない画像処理装置に入力され、画像処理装置において、測定対象物までの距離が三角測量の原理で計測される。
【0067】
具体的には、左側の測距センサS1から左側のタイヤT迄の距離m1と、右側の測距センサS2から右側のタイヤT迄の距離m2を各測距センサS1,S2で測定する。なお、車両のタイヤ幅は、既知の値tとする。
【0068】
ここで、W1とW2の荷重測定値、3軸の左側の車輪列の合計荷重Wa,3軸の右側の車輪列の合計荷重Wb、距離a,距離b,車両の重心位置xには、下記式(22)〜式(28)が成立する。式(22)〜式(28)に基づいて、Wa,Wbを消去すると、車両の重心位置xは下記式(29)で求めることができる。
【0069】
Wa+Wb=W1+W2 ……(22)
Wa・x=Wb・(b−x) ……(23)
(a+x)W1=(b−x+a’) ……(24)
ただし、 a =(m1+t/2)−r1 ……(25)
a’=(m2+t/2)−r1 ……(26)
b =r−(m1+m2+t) ……(27)
(a+x)・W1=(b−x+a)・W2=(a+b−x)・W2……(28)
x={(W2−W1)・a+b・W2}/(W1+W2) ……(29)
(第1実施形態の作用)
次に、上記のように構成された、地上測定部10と、車両走行危険度評価システム100の作用を説明する。図9は地上測定部10の計量部30で行う作業フローチャートである。
【0070】
S10において、車両の運転者は、図3に示すように、左ライン40L及び右ライン40RをタイヤT(車輪)が踏むように車両を計量台32に搬入する。このとき、運転者は、左ライン40L及び右ライン40Rの真上にタイヤTが載り込むように車両を計量台32に載り込ませる。そして、運転者は、2軸目のタイヤTが左輪用傾斜ブロック36C、右輪用傾斜ブロック37Cを降りたところで図2の実線で示すように車両を停止させ、水平姿勢による計量状態をとる。
【0071】
そして、S11で、車両が計量台32上で静止してから荷重信号の安定を待つ。
S12では、演算制御装置52のオペレータが、操作装置54の測定キーをオン操作して、第1荷重センサLC1〜第4荷重センサLC4(すなわち、ロードセル)から出力される荷重信号を測定する。すなわち、演算制御装置52のCPU55は、第1荷重センサLC1〜第4荷重センサLC4からの荷重信号を受け取り、重量測定プログラムを実行して重量値測定部55aとして機能する。
【0072】
重量値測定部55aは、零点移動成分荷重(車両が計量台32に載り込む前に零点調整がなされ、記憶された荷重)と、風袋荷重(計量台32などの荷重を含む)とを、前記荷重信号の測定結果から除去し、計量台32上の負荷荷重のみにより、前記W11,W12,W21,W22を求める。
【0073】
S13では、重量値測定部55aは、S12で求めたW11,W12,W21,W22に基づいて、前記式(1)、式(2)、式(3)によりW1,W2,Wtを算出する。
又、重量値測定部55aは、上記式(7)により、重心位置xを求める。
【0074】
S14では、重量値測定部55aは、W1,W2,Wt,xを表示装置56に表示させる。
次に、S15では運転者は、車両を進行方向に移動させて全車輪を傾斜ブロック36A〜36C,37A〜37C上に載り込ませて、停止させる。すると図5に示すように、車両(図5では、タイヤのみ図示)は傾斜角度θの傾斜姿勢となる。そして、S16で、車両が傾斜ブロック上で静止してから荷重信号の安定を待つ。
【0075】
S17では、演算制御装置52のオペレータが、操作装置54の測定キーをオン操作して、第1荷重センサLC1〜第4荷重センサLC4(すなわち、ロードセル)から出力される荷重信号を測定する。すなわち、演算制御装置52のCPU55は、第1荷重センサLC1〜第4荷重センサLC4からの荷重信号を受け取り、重量測定プログラムを実行して重量値測定部55aとして機能する。
【0076】
重量値測定部55aは、零点移動成分荷重(車両が計量台32に載り込む前に零点調整がなされ、記憶された荷重)と、風袋荷重(計量台32などの荷重を含む)とを、前記荷重信号の測定結果から除去し、計量台32上の負荷荷重のみにより、前記積載荷重W11’,W12’,W21’,W22’を求める。
【0077】
S18では、重量値測定部55aは、式(14)、式(15)により、W1’、W2’を算出する。
重量値測定部55aは、上記S13,及びS18等で算出した合計荷重W1,合計荷重W2,総荷重Wt,重心位置x,合計荷重W1’,合計荷重W2’をメモリ53に記憶する。
【0078】
(車両走行危険度評価システム100の重量位置関連情報の取得処理)
この後、地上測定部10の情報出力手段70と、車両の車両走行危険度評価システム100の情報入力手段116とが通信ケーブル72を介して、或いは無線LAN等により通信が可能な状態とする。この状態で運転者の操作スイッチ群130のキー操作により、メモリ53に記憶された重心位置x,傾斜角度θ,距離a,b,合計荷重W1,W2,W1’,W2’,総荷重Wtが車両走行危険度評価システム100に出力される。ここで、重心位置x,合計荷重W1,W2,W1’,W2’が重量位置関連情報に相当する。又、傾斜角度θ,距離a,bは、重心高さh(重心位置関連情報)を算出(生成)するためのパラメータとなる。
【0079】
車両走行危険度評価システム100では、地上測定部10から出力された合計荷重W1,W2,W1’,W2’,総荷重Wt,重心位置x,傾斜角度θ,距離a,bを、制御回路110のRAM113に記憶する。
【0080】
(走行予定経路の設定及び重心高さの算出)
図10(a)は、車両走行危険度評価システム100の制御回路110が行う走行予定経路の設定及び重心高さhの算出フローチャートである。
【0081】
図10(a)のS21〜S23は、ROM112に記憶された走行予定経路の設定(探索)及び重心高さ算出プログラム(以下、単に探索プログラムという)により、CPU111が行う処理である。
【0082】
S21では、運転者は、操作スイッチ群130を操作して、出発地(例えば、操作スイッチ群130の操作時における車両の現在地)と目的地、走行条件(短い距離優先、一般道路優先、有料道路優先、広い道路優先等)等の拘束条件を付した探索指令を、操作スイッチ群130から制御回路110に出力する。すると、制御回路110のCPU111は、ROM112に格納された探索プログラムに基づいて、外部記憶装置140の道路マップデータベースから拘束条件(すなわち、探索条件)に合った経路探索を行う。そして、運転者は、操作スイッチ群130を操作することにより、前記探索結果の中から、走行予定経路を設定する。この探索結果及び設定された走行予定経路に関する道路情報はRAM113に記憶される。CPU111は、走行予定路設定手段に相当する。
【0083】
S22では、図11(a)に示すように走行予定経路の区分地点dn(n=0,1,2,3……)の設定が出発地から目的地まで順次付され、各区分地点dnの緯度・経度が、RAM113に記憶される。なお、前記各区分点のdnの緯度・経度は、走行予定経路の出発地、目的地、及びその走行経路のノード座標(緯度・経度)、曲路の入口位置、出口位置等に付与された緯度・経度に基づいて算出される。
【0084】
具体的には、前記走行予定経路に対して予め定めたd(m)ずつ区分地点が設定される。各区分地点は車両の現在位置よりも先行き方向に位置する危険度評価位置となる。dの値は、限定するものではないが、例えば数十m〜数百mの範囲であればよい。d(m)毎に区切られる区間を以下、単位区間という。
【0085】
ここで、CPU111は、危険度評価位置設定手段に相当する。
S23では、重心位置情報算出部114は、RAM113に記憶した合計荷重W1,W2,W1',W2',重心位置x,傾斜角度θ,距離a,bと、前記式(19)〜式(21)、式(9)を使用して重心高さhを算出する。重心位置情報算出部114は算出した重心高さhをRAM113に記憶し、このフローチャートの処理を終了する。
【0086】
なお、S23の処理は、S22後に行われる必要はなく、S21とS22の間、或いはS21の前で行われても良い。又、S23の処理は、S22の処理後に行う代わりに、後述するS31〜S35の間で行われても良い。
【0087】
(危険度評価処理)
次に、図10(b)を参照して、本実施形態の危険度評価処理について説明する。
図10(b)は、危険度評価プログラムのフローチャートである。車両が、前記走行予定経路を走行中は、CPU111は、危険度評価プログラムを所定周期(例えば、数〜数十ms)毎に実行する。CPU111は、このプログラム実行時には、危険度評価部115として機能する。
【0088】
S31では、CPU111は、車両が走行する現在位置Mを位置検出器120から取得する。位置検出器120は現在位置取得手段に相当する。
S32では、CPU111は、車速センサ126から車速Bを取得する。車速センサ126は、車速取得手段に相当する。
【0089】
S33では、CPU111は、車両の現在位置Mが区分地点dnに達したか否かを判定する。なお、dnの「n」の初期値は、「0」である。区分地点dnに達していない場合には、このフローチャートを一旦終了する。
【0090】
S33において、現在位置Mが区分地点dnに達している場合には、S34において、CPU111は、次回の制御周期以降で危険度評価位置となる区分地点dnをd(n+1)に更新する。
【0091】
S35では、CPU111は、先行き区間の決定及び曲率半径算出処理を行う。前記先行き区間、すなわち、危険度評価対象区間は、車速Bが速いほど、現在位置Mと一致した区分地点dnから遠位となるように決定される。
【0092】
まず、CPU111は、危険度評価位置である区分地点dnからK(係数)・dだけ離間した先行きの地点(先行き位置)からの先行き区間を求めるために、前記K(係数)を設定する。ここで、危険度評価位置である区分地点dnからK(係数)・dだけ離間した距離は、請求項6の所定距離に相当する。
【0093】
(係数Kの設定例1)
Kの設定は、例えば、区分地点(危険度評価位置)での車速Bが、B≦70km/hのときは、K=3とし、70km/h<B≦90km/hのときは、K=4とし、90km/h<B≦120km/hのときは、K=5とし、120km/h<Bのときは、K=6のように、現在の車速Bが速いほど、現在位置Mよりも遠位の地点の評価を行うようにする。この場合、係数Kと車速Bとをマップ化されたテーブルが、ROM112に予め記憶されており、現在の車速Bに応じて前記係数Kが読み出される。
【0094】
(係数Kの設定例2)
又、上記のように段階的でなく、現在の車速Bと、地上測定部10によって測定された総荷重Wt(質量:Wt/g)との積(運動量)をパラメータにとるとともに、変換係数uを設け、下式(30)により、係数Kを求めてもよい。gは重力加速度である。
【0095】
K=u・B・(Wt/g) ……(30)
(なお、右項が小数の場合は、四捨五入して整数化するものとする。)
設定例1、2のようにすると、現在の車速Bが速いほど、又、車両の総荷重Wtが大きいほど(運動量が大きいほど)、遠い先行きの危険度評価対象区間において、危険度評価位置の車速Bと当該危険度評価対象区間の安全限界速度Vnを評価できるようになる。又、現在の車速Bを継続すれば危険である場合に、ブレーキ操作による減速対応が滑らかに可能になる。
【0096】
上記のように、係数Kを設定すると、CPU111は、先行き位置K・dを求め、次に、先行き位置K・dから始まる先行き区間(危険度評価対象区間)K1・dを設定する。ここで、K1は、係数であり、Kと同じでもよく、或いは同じでなくても良いが、「2」以上の整数である。すなわち、先行き位置K・dから始まる先行き区間は、d(m)毎に区切られる単位区間を複数有する区間からなる。
【0097】
(K,K1の具体例)
具体例で説明すると、図11(a)では、車速が一定であるとするとともに、K=K1=3とした例で先行き区間を3つの単位区間で構成する場合の例を示している。図11(a)では、「d0」、「d1」、「d2」、……「dn」は、区分地点を表している。
【0098】
図11(a)に示す車両が区分地点d0に位置すると、先行き位置K・dは、区分地点d0から3d離間した区分地点d3となり、このときの先行き区間は、区分地点d3から区分地点d6迄の区間となる。
【0099】
次に、車両が、区分地点d1に達した場合は、区分地点d1から3d離間した先行き位置は、区分地点d4となり、このときの先行き区間は、区分地点d4から区分地点d7迄の区間となる。以後、同様に区分地点に車両が到達する毎に、先行き区間は、3d離間した先行き位置から始まる3つの単位区間分となる。
【0100】
さらに、図11(a)に示す車両が区分地点d2に位置すると、先行き位置K・dは、区分地点d2から3d離間した区分地点d5となり、このときの先行き区間は、区分地点d5から区分地点d7迄の区間となる。
【0101】
なお、道路をdの距離でもって区分化し、先行き区間(危険度評価対象区間)を、本例のようにd3〜d6、d4〜d7、d5〜d8のように区分が異なる箇所を設けた理由、及び先行き区間を複数の区分で構成している理由は下記の通りである。
【0102】
すなわち、図11(b)において、区分の設定を、仮に先行き区間(危険度評価対象区間)をd0〜d2、d2〜d4、…と、区分の重なりを取らなかった場合に、地点の設定によってはこれらの区間は、ほぼ直線路として評価されてしまう可能性があるからである。又、先行き区間(危険度評価対象区間)が単一区分ずつの間隔とした場合、d1〜d2、d2〜d3、…となって、地点の設定や曲路の状態によっては、評価すべき曲路がこれらの間に含まれず、危険度評価がなされない可能性があるからである。
【0103】
又、図11(b)における、d0、d1、d2、d3、…の地点毎に、これらの地点に対応する道路の曲率半径により危険度を評価する方法も考えられる。しかし、例えば同図に示すように、曲路において、区分設定の地点が「d2」のようにうまく曲路部の上に設定されず、曲路部分より前後に外れ、直線路に近い部分を指定してしまうことがあり、このように、順次危険度評価対象区間が、先に行われた危険度評価対象区間と一部の重なりがない場合には、正しく危険度の評価ができない。
【0104】
次に、CPU111は、設定した先行き区間(危険度評価対象区間)K1・dの最小の曲率半径Rnを、設定した先行き区間が有する区分地点の緯度・経度に基づいて求める。
(遠心力の説明)
次に、車両が曲路を走行する際に、車両の重心Gに働く遠心力を、図12を参照して説明する。図12は、車両が紙面の表側から裏側に向かって左カーブの曲路を走行する場合を表しており、重心Gにおいて、右方向に遠心力Fが作用する。
【0105】
図12に示すP6の周りの回転モーメントについて、下記式(31)が成立すると、車両が浮き上がり転倒する。
F’・h’>m・g・(b−X) ……(31)
なお、記号は下記の通りである。
【0106】
m:車両の質量
g:重力加速度
R:曲路の曲率半径
V:車速
F:重心Gに掛かる遠心力
F’:P6を回転中心としたときの重心Gに働く力
h’:P6から重心Gまでの距離
図12に示すように重心GとP6とのなす角度をψとすると、
F’=F・sinψ ……(32)
h’=h/sinψ ……(33)
F=m・(V2/R) ……(34)
が成立するため、
h・m・(V2/R)=m・g・(b−X) ……(35)
となる。従って、
V=[g・R・{(b−x)/h}]1/2 ……(36)
が求まる。式(36)が車両の安全限界速度の算出式となる。
【0107】
フローチャートの話に戻して、S36では、CPU111は、設定した先行き区間(危険度評価対象区間)K1・dでの安全限界速度Vnを、上記式(36)に基づく下記式(37)により算出する。
【0108】
Vn=[g・Rn・{(b−x)/h}]1/2 ……(37)
さらに、CPU111は、安全限界速度Vnに余裕度Dを見込んだ1−Dを乗算する。余裕度Dとしては、例えばD=0.1が挙げられるが、余裕度Dの数値はD=0.1に限定されるものではなく、他の数値でもよい。この算出された(1−D)・Vnは、提示手段としてのディスプレイ150に表示される。
【0109】
S37では、CPU111は、車速Bが、(1−D)・Vnを超えているか否かを判定する。S37において、車速Bが、(1−D)・Vnを以下の場合は、このフローチャートを一旦終了する。S37において、車速Bが(1−D)・Vnを超えている場合は、S38において、CPU111は、車速Bが転倒の危険度が高い旨の警報信号をディスプレイ150及びカーナビが備えている図示しないスピーカの前段に設けられている図示しない音声合成回路、又は、スピーカに出力した後、このフローチャートを一旦終了する。前記ディスプレイ150に出力する警報信号は、車速Bが速すぎて転倒の危険度が高い旨の警告文意を表す、語句、文章である。又、前記音声合成回路に出力する前記警報信号は、前記音声合成回路により警告語句、警告文章を表す音声信号に変換されて前記スピーカで発声される。又、スピーカに出力された警報信号は、ブザー音等の警報音として鳴動される。
【0110】
なお、警報信号の出力は、ディスプレイ150及びカーナビが備えている図示しない、音声合成回路、或いはスピーカのいずれか1つであってもよい。前記ディスプレイ150での警告文意を表す、語句、文章、及びスピーカが出力する警告語句、警告文章、又は警報音は警報情報に相当する。
【0111】
本実施形態では、下記の特徴がある。
(1) 本実施形態の車両走行危険度評価システムは、道路情報を記憶する外部記憶装置140(道路情報記憶手段)と、車両の現在位置を取得する位置検出器120(現在位置取得手段)を備える。又、前記システムは、現在位置から目的地までの走行予定経路を、付与された探索条件の下で道路情報に基づいて設定するCPU111(走行予定経路設定手段)と、車両の重心位置関連情報を取得する情報入力手段116とを備える。又、システムは、車両の車速を取得する車速センサ126(車速取得手段)と、走行予定経路上において、現在位置から先行き方向に位置する危険度評価位置を設定するCPU111(危険度評価位置設定手段)を備える。さらに、システムは、車両が設定された危険度評価位置に到達した際に、走行予定経路上であって、当該危険度評価位置よりも先行き方向に離間した危険度評価対象区間に対して、該危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、前記重心位置関連情報と、前記危険度評価位置での車速に基づき、前記車両の危険度を評価するCPU111(危険度評価手段)を備える。そして、CPU111(危険度評価手段)の評価結果を提示するディスプレイ150等(提示手段)を備える。
【0112】
この結果、本実施形態のシステムによれば、車両が道路の曲路を走行するとき、車両の重心位置に作用する遠心力の大きさと重心位置情報による車両の転倒危険性の評価を行うことができる。又、常に走行予定経路に沿って現在走行している位置より先行きの道路事情に応じた危険度評価、警報と安全限界速度を予め前もって運転者に提示することができる。
【0113】
(2) 本実施形態のシステムのCPU111(危険度評価手段)は、車両が設定された危険度評価位置に到達した際の車速が速くなるほど、或いは、危険度評価位置に到達した際の車速と、前記重心位置関連情報から得られる前記車両の運動量が大きいほど、危険度評価位置からの離間距離を長くした危険度評価対象区間に対して危険度を評価するようにしている。
【0114】
なお、仮に、危険度評価位置と危険度評価対象区間との離間距離が車速に関係なく一定の場合、車速が速くなると、危険度評価対象区間に車両が到達する時間は短くなり、危険度の評価がされた危険度対象区間に対応する運転者の処置が遅れる可能性がある。
【0115】
それに対して、本システムによれば、設定された危険度評価位置に到達した際の車速が速いほど、現在速度を継続すれば危険である場合に、危険度評価対象区間に車両が到達する時間は長くなり、危険度評価位置からの離間距離を長くした危険度評価対象区間に対応して、ブレーキ操作による車両の減速対応が可能となり、すなわち、該危険度対象区間に対応する運転者の処置の遅れがなくなる。
【0116】
又、車両の運動量が大きいほど、ブレーキ操作による減速距離が長くなるが、危険度評価位置からの離間距離を長くすることにより、該危険度評価対象区間に進入する前に、ブレーキ操作による車両の減速対応が可能となる。
【0117】
又、危険度評価位置に到達した際の車速が速いほど、又は車両の運動量が大きいほど、区間距離を先行き方向へ長くした危険度評価対象区間の危険度の評価を行うことができる。
【0118】
(3) 本実施形態のシステムは、CPU111(危険度評価位置設定手段)は、危険度評価位置を先行き方向に複数設定する。又、CPU111(危険度評価部115)は、危険度評価手段として、順次危険度評価位置に車両が達する毎に、各危険度評価位置と所定距離(K・d)離間した危険度評価対象区間における車両の状態の危険度の評価を行う。
【0119】
この結果、本実施形態によれば、先行き方向に複数設定した危険度評価位置に車両が達する毎に、危険度評価位置と所定距離離間した危険度評価対象区間における車両の状態の危険度の評価を行うことができる。
【0120】
(4) 本実施形態のシステムでは、危険度評価部115(危険度評価手段)は、危険度評価位置に前記車両が達する度に、車両の危険度の評価が行われた前回の危険度評価対象区間と、一部が重なる新たな危険度評価対象区間において、車両の危険度を評価する。この結果、本実施形態によれば、曲路において、曲路部の上に危険度評価対象区間が設定されないことを防止でき、順次危険度評価対象区間が、先に行われた危険度評価対象区間と一部の重なりがない場合に比較して、正しく危険度の評価を行うことができる。
【0121】
(5) 本実施形態のシステムでは、危険度評価部115(危険度評価手段)は、危険度評価対象区間に関する前記道路情報に基づいた曲率半径Rnと、重心高さh(重心位置関連情報)と、危険度評価位置での車速に基づいた車両に作用する遠心力に基づいて車両の安全限界速度を算出する。又、ディスプレイ150(提示手段)は、前記安全限界速度を提示する。この結果、本実施形態のシステムによれば、この結果、本実施形態によれば、車両が走行する道路の曲率半径に基づいて、危険度評価位置での車速で、車両の重心に作用する遠心力に関する危険度を提示することができる。
【0122】
(6) 本実施形態のシステムでは、危険度評価位置での車両の車速が安全限界速度を超えている場合、ディスプレイ150等(提示手段)が、警報情報を提示する。この結果、運転者に対して、危険度評価位置での車両の車速が、危険度評価位置よりも遠位に位置する危険度評価対象区間での安全限界速度を超えている場合、早期に運転者に警告できるため、早期に運転者は、車速の減速措置を取らせることができる。
【0123】
(第1実施形態の変形)
第1実施形態では、計量台32の水平面32a上に、傾斜ブロックを載置したが、水平面32aを有する水平計量台と、左右幅方向において、いずれか一方に傾斜する傾斜面を有する傾斜計量台との計2台の計量台から計量部30を構成してもよい。この場合、両計量台には、前記実施形態の計量台と同様の個数及び配置で荷重センサをそれぞれ配置するものとする。
【0124】
又、水平計量台には、図7に示すように、「計量台32の測定の変形例」で説明した測距センサS1,S2を、同様に配置する。又、傾斜計量台の傾斜面の傾斜角度をθとする。
【0125】
一方、傾斜計量台には、図6に示すように、車両の載り込み方向とは直交する方向(すなわち、左右方向)において、いずれか一方の片側に測距センサS3を配置する。図6では右側に測距センサS3が配置されている。この測距センサS3と傾斜計量台の右側のロードセル列の中心位置P7までの距離をj1とする。傾斜角度θ、j1は既知の値であり、メモリ53に記憶されている。
【0126】
上記のように構成された計量部30を使用して、車両を計量する場合、車両を水平計量台に載り込ませて、前記図7で説明したことと同様に、各測距センサS1,S2と各タイヤT迄の各距離m1,m2を、測距センサS1,S2により測距するとともに、水平計量台の荷重センサにより、W1,W2を測定する。そして、これらの測定値より、「計量台32の測定の変形例」と同様に前記式(22)〜式(29)から、左右車輪の中心距離bと、左右車輪の中心距離bの中に存在する重心位置xを重量値測定部55aは算出し、これらの算出結果をメモリ53に記憶する。なお、タイヤ幅tは既知とし、メモリ53に記憶されている。
【0127】
次に、傾斜計量台に車両を載り込ませる。この場合は、車両が前記実施形態と同様の傾斜姿勢を取るように載り込ませる。なお、この場合、車両は、前記実施形態で説明した仮想傾斜面A上に位置して傾斜姿勢となることと同様であるため、説明の便宜上、図6を参照して説明する。ここでは、説明の便宜上、Aを単に傾斜面という。
【0128】
上記のようにして、車両を傾斜計量台に載り込ませて、車両の右側の車輪列の中心が、傾斜計量台上で図6に示すように傾斜面A上のP6”の位置に載り込んだとする。この場合、P6”の位置は、下記のように測距センサS3の測定によって、測距センサS3と右側の車輪迄の距離j2が測距される。そして、該距離j2とタイヤ幅tの値に基づいて、重量値測定部55aは、傾斜方向に沿った距離j2+t/2を算出する。又、重量値測定部55aは、下式(38)により、P61P7の距離を算出する。なお、ここでのP61は、傾斜計量台において、前記実施形態のP6”に相当する位置から垂線が降ろされて水平傾斜台の水平面と交差点に掛かる荷重合計値Wbの位置である。
【0129】
j2+t/2=(P61P7/cosθ+j1・cosθ) ……(38)
前記式(38)により、P61P7、すなわち、車両が水平姿勢の場合における右側の車輪列の中心から右側のロードセル列の迄の距離が算出される。
【0130】
又、記憶した左右車輪の中心距離b、重心位置x、及び傾斜計量台で測定されたW1’(傾斜時の左側のロードセル列のロードセルに発生した合計荷重)、W2’(傾斜時の右側のロードセル列のロードセルに発生した合計荷重)、傾斜角度θ,距離a,合計荷重W1,W2,及び総荷重Wtは、地上測定部10から車両走行危険度評価システム100に出力される。
【0131】
上記のように水平計量台と傾斜計量台から計量部30を構成しても、第1実施形態と同様の効果を奏することができる。
(第2実施形態)
次に、第2実施形態を図1(b)、図、9、図10(b)、図13、図14等を主に参照して説明する。本実施形態では、ハードウエア構成が第1実施形態とは下記のように異なっている。
【0132】
第1実施形態では、車両走行危険度評価システム100のCPU111が重心位置情報算出部114の機能を有するようにしたが、本実施形態では、図1(b)に示すように、CPU111の重心位置情報算出部114の機能が省略され、その代わりに地上測定部10の演算制御装置52のCPU55が、重量値測定部55aの他に重心位置情報算出部55bの機能を有する。他の構成は、第1実施形態のハードウエア構成と同一のため、第1実施形態と同一構成については、同一符号を付してその説明を省略する。重心位置情報算出部55bは、重心位置情報算出手段に相当する。
【0133】
そして、本実施形態では、重量値測定部55aにより、第1実施形態と同様に図9のフローチャートで示す処理が行われる。図9に示すフローチャートの処理が終了すると、CPU55(すなわち、重心位置情報算出部55b)は、図13に示すフローチャートのS41での処理を、図示しないCPU55の図示しないROMに記憶された重心高さ算出プログラムを実行することにより重心高さhを算出する。
【0134】
すなわち、CPU55は、図示しないRAMに記憶した合計荷重W1,W2,W1',W2',重心位置x,傾斜角度θ,距離a,bと、前記式(19)〜式(21)、式(9)を使用して重心高さhを算出する。
【0135】
CPU55は算出した重心高さh、重心位置x,傾斜角度θ,距離a,b,合計荷重W1,W2,W1',W2',総荷重Wtを、情報出力手段70、通信ケーブル72、情報入力手段116を介して、車両走行危険度評価システム100に出力する。重心高さh、重心位置x,傾斜角度θ,距離a,b,合計荷重W1,W2,W1',W2',総荷重Wtは、CPU111により、制御回路110のRAM113に記憶される。重心高さh、重心位置x,傾斜角度θ,距離a,b,合計荷重W1,W2,W1',W2',総荷重Wtは重心位置関連情報に相当する。
【0136】
図14のS21及びS22は、制御回路110のROM112に記憶された走行予定経路の設定(探索)プログラムにより、CPU111が行う処理である。このS21、S22の処理は、第1実施形態の図10(a)のS21,S22と同じ処理のため、説明を省略する。S21,S22での探索結果及び設定された走行予定経路に関する道路情報は第1実施形態と同様にRAM113に記憶される。CPU111は、走行予定路設定手段に相当する。
【0137】
そして、運転者により、操作スイッチ群130の操作により危険度評価プログラムが起動されると、該プログラムに従って第1実施形態と同様の図10(b)のフローチャートで示す危険度評価処理を行う。
【0138】
上記のように構成された第2実施形態は、第1実施形態と異なり、車両走行危険度評価システム100の制御回路110に、重心位置情報算出部を備えていなくても、地上測定部10側で、重心高さh等の車両の重心位置関連情報が算出されて、情報入力手段を介して車両走行危険度評価システム100の制御回路110できるため、第1実施形態と同様の効果を奏することができる。
【0139】
なお、本発明の実施形態は前記実施形態に限定されるものではなく、下記のように変更しても良い。
・ 前記各実施形態では、車両の左右の車輪に対応して、左輪用傾斜ブロック、及び右輪用傾斜ブロックを設けた。この代わりに、左右傾斜ブロックを互いに連結するようにして、上記左輪用傾斜ブロック、右輪用傾斜ブロックよりも長い横幅を有する1軸に共通の傾斜ブロックを形成したものを使用してもよい。
【0140】
・ 前記各実施形態では、前記傾斜ブロックは計量台32に対してボルト止め等により、着脱自在にしてもよい。そして、貨物自動車の形式の相違による車輪の配置と対応するように予め前記傾斜ブロックの計量台32の装着位置を、該形式に合わせて複数用意しておき、前記ボルトの締め付け、及び締め付け解除により、該形式に合わせて傾斜ブロックの装着位置を適宜変更できるようにしてもよい。併せて、貨物自動車の車軸数(すなわち、タイヤ数)に併せて、傾斜ブロックの数を増減するように変更してもよい。
【0141】
・ 前記各実施形態では、ロードセルは、ストレインゲージ式の圧縮型起歪部を持つロードセルを使用したが、磁歪式、静電容量型、弦振動式又はジャイロスコープ式のロードセルに変更してもよい。
【0142】
・ 前記計量台に傾斜ブロックを設ける代わりに、計量台上に車両積載面を有する車両積載台を設けるとともに、該車両積載台と計量台間にモータによる電動式昇降装置、或いは油圧ジャッキ等よりなる車両積載面傾斜装置を設けて、前記車両積載面傾斜装置により水平姿勢の計量台上で車両積載台のみを所定の角度に傾斜させる構成としてもよい。この場合、計量台上での車両の車輪位置の測定値及び車両積載面が水平な場合と、所定の角度に車両積載面を傾斜させた場合の計量台の荷重センサの荷重信号の測定値に基づいて車両の重心位置を求めるようにしてもよい。また、車両積載台のみを2種類の所定の角度θ1とθ2に傾斜させる構成としてもよい。この場合、計量台での車両の車輪位置の測定値及び車両積載面が所定の角度θ1の場合とθ2の角度に傾斜させた場合の計量台の荷重センサの荷重信号の測定値に基づいて車両の重心位置を求めるようにしてもよい。
【0143】
・ 第1実施形態及び第2実施形態の計量部30ではデジタル荷重信号を出力するデジタル荷重センサを用いたが、アナログ値を出力するアナログ荷重センサ(ロードセル)を用いてもよい。この場合、演算制御装置52側に、増幅器及びA/D変換器を設けて、アナログ荷重センサのアナログ荷重信号を、対応する増幅器により増幅してA/D変換器によりデジタル荷重信号に変換し、演算制御装置52に入力する。
【0144】
・ 前記各実施形態では、地上測定部10と、車両走行危険度評価システム100との情報の伝達を、有線、無線、或いは、USBメモリを使用するようにしたが、これらに限定するものではなく、磁気カード、ICカード等の可搬情報媒体を利用して行っても良い。この場合、車両走行危険度評価システム100の情報出力手段、及び車両走行危険度評価システム100の情報入力手段としては、前記カードを書き込み、及び読み出し可能なカードリーダとし、前記可搬情報媒体に重量位置関連情報、或いは重心位置関連情報を一旦、地上測定部10のカードリーダで可搬情報媒体に書き込みした後、車両走行危険度評価システム100のカードリーダで読み込みする。
【0145】
・ 図10(b)のS37では、安全限界速度Vnに対して余裕度Dを考慮した1−Dを乗算して、車速Bと比較したが、1−Dを乗算することなく、安全限界速度Vnと車速Bとを比較するようにしてもよい。
【0146】
・ 前記実施形態では、計量部30で計量される車両は、全輪数×駆動輪数=6×2で、かつ前1軸、後2軸である貨物自動車(ワンデフ車)の計量が可能になっているが、傾斜ブロックの配置位置や、ブロック数は車種の仕様に併せて新たに着脱して変更してもよい。
【0147】
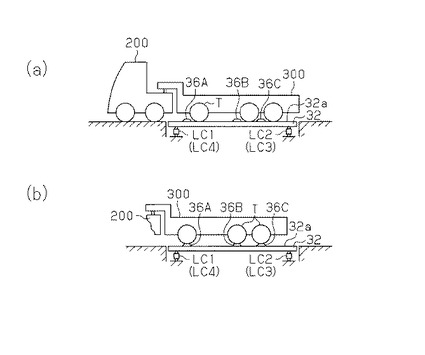
又、駆動車200(トラクター)と荷台車300(トレーラ)からなる貨物車両の場合、図15(a)、(b)に示すようにして計量してもよい。図15(a)は、計量台32の水平面32a上に荷台車300を積載した状態とする。このとき、駆動車200は、計量台32上には積載されず、計量台32の水平面32aと同じ高さの地表面上に位置させる。次に、図15(b)に示すように、荷台車300の第1軸〜第3軸のタイヤTをそれぞれ、傾斜ブロック36A〜36C、傾斜ブロック37A〜37C上の上面に載せた状態にする。なお、説明の便宜上、図15(a)、(b)では、傾斜ブロック36A〜36Cのみ図示されている。
【0148】
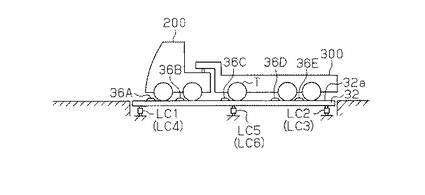
・ 又、図16に示すように、駆動車200と荷台車300の全体を計量する場合は、駆動車200と、荷台車300とが連結された状態で、積載可能な水平面32aを有する計量台32としてもよい。この場合、図16に示すように、例えば、計量台32の長手方向の中央部にさらに、長手方向とは直交する方向に、第5荷重センサLC5及び第6荷重センサLC6を配置するものとする。第5荷重センサLC5、第6荷重センサLC6の構造は、第1荷重センサLC1と同一構成とする。
【0149】
又、図16の計量台32では、駆動車200の前輪(タイヤ)と後輪(タイヤ)とが、傾斜ブロック36A、37A、36B、37Bに載ることができるように配置され、荷台車300の第1軸のタイヤTが傾斜ブロック36C、37C、36D、37D、36E、37Eに載ることができるように配置されている。なお、説明の便宜上、図16では、傾斜ブロック36A〜36Eのみ図示されている。
【0150】
・ 第1実施形態、及び第2実施形態の地上測定部10の構成は、例示であり、車両の重量が測定でき、車両の重心位置関連情報を生成できるものであれば限定されるものではない。
【符号の説明】
【0151】
100…車両走行危険度評価システム、
111…CPU(走行予定路設定手段、危険度評価位置設定手段)、
114…重心位置情報算出部、
115…危険度評価部(危険度評価手段)、116…情報入力手段、
120…位置検出器(現在位置取得手段)、
126…車速センサ(車速取得手段)、
140…外部記憶装置(道路情報記憶手段)、
150…ディスプレイ(提示手段)。
【特許請求の範囲】
【請求項1】
道路情報を記憶する道路情報記憶手段と、車両の現在位置を取得する現在位置取得手段と、前記現在位置から目的地までの走行予定経路を、付与された探索条件の下で前記道路情報に基づいて設定する走行予定路設定手段と、前記車両の重心位置関連情報を取得する情報入力手段と、前記車両の車速を取得する車速取得手段と、前記走行予定経路上において、前記現在位置から先行き方向に位置する危険度評価位置を設定する危険度評価位置設定手段と、前記車両が前記設定された危険度評価位置に到達した際に、前記走行予定経路上であって、当該危険度評価位置よりも先行き方向に離間した危険度評価対象区間に対して、該危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、前記重心位置関連情報と、前記危険度評価位置での車速に基づき、前記車両の危険度を評価する危険度評価手段と、前記危険度評価手段の評価結果を提示する提示手段を備えたことを特徴とする車両走行危険度評価システム。
【請求項2】
前記危険度評価手段は、前記車両が前記設定された危険度評価位置に到達した際の車速が速くなるほど、或いは、前記危険度評価位置に到達した際の車速と、前記重心位置関連情報から得られる前記車両の運動量が大きいほど、前記危険度評価位置からの離間距離を長くした危険度評価対象区間に対して危険度を評価することを特徴とする請求項1に記載の車両走行危険度評価システム。
【請求項3】
前記危険度評価位置設定手段は、前記危険度評価位置を先行き方向に複数設定し、
前記危険度評価手段は、順次前記危険度評価位置に車両が達する毎に、各危険度評価位置と所定距離離間した前記危険度評価対象区間における前記車両の危険度の評価を行うことを特徴とする請求項1又は請求項2に記載の車両走行危険度評価システム。
【請求項4】
前記危険度評価手段は、前記危険度評価位置に前記車両が達する度に、前記車両の危険度の評価が行われた前回の危険度評価対象区間と、一部が重なる新たな危険度評価対象区間において、前記車両の危険度を評価することを特徴とする請求項3に記載の車両走行危険度評価システム。
【請求項5】
前記危険度評価手段は、前記危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、前記重心位置関連情報と、前記危険度評価位置での車速に基づいた前記車両に作用する遠心力に基づいて前記車両の安全限界速度を算出し、
前記提示手段は、前記安全限界速度を提示することを特徴とする請求項1乃至請求項4のうちいずれか1項に記載の車両走行危険度評価システム。
【請求項6】
前記提示手段は、前記危険度評価位置の車速が前記安全限界速度を超えている場合、警報情報を提示することを特徴とする請求項5に記載の車両走行危険度評価システム。
【請求項1】
道路情報を記憶する道路情報記憶手段と、車両の現在位置を取得する現在位置取得手段と、前記現在位置から目的地までの走行予定経路を、付与された探索条件の下で前記道路情報に基づいて設定する走行予定路設定手段と、前記車両の重心位置関連情報を取得する情報入力手段と、前記車両の車速を取得する車速取得手段と、前記走行予定経路上において、前記現在位置から先行き方向に位置する危険度評価位置を設定する危険度評価位置設定手段と、前記車両が前記設定された危険度評価位置に到達した際に、前記走行予定経路上であって、当該危険度評価位置よりも先行き方向に離間した危険度評価対象区間に対して、該危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、前記重心位置関連情報と、前記危険度評価位置での車速に基づき、前記車両の危険度を評価する危険度評価手段と、前記危険度評価手段の評価結果を提示する提示手段を備えたことを特徴とする車両走行危険度評価システム。
【請求項2】
前記危険度評価手段は、前記車両が前記設定された危険度評価位置に到達した際の車速が速くなるほど、或いは、前記危険度評価位置に到達した際の車速と、前記重心位置関連情報から得られる前記車両の運動量が大きいほど、前記危険度評価位置からの離間距離を長くした危険度評価対象区間に対して危険度を評価することを特徴とする請求項1に記載の車両走行危険度評価システム。
【請求項3】
前記危険度評価位置設定手段は、前記危険度評価位置を先行き方向に複数設定し、
前記危険度評価手段は、順次前記危険度評価位置に車両が達する毎に、各危険度評価位置と所定距離離間した前記危険度評価対象区間における前記車両の危険度の評価を行うことを特徴とする請求項1又は請求項2に記載の車両走行危険度評価システム。
【請求項4】
前記危険度評価手段は、前記危険度評価位置に前記車両が達する度に、前記車両の危険度の評価が行われた前回の危険度評価対象区間と、一部が重なる新たな危険度評価対象区間において、前記車両の危険度を評価することを特徴とする請求項3に記載の車両走行危険度評価システム。
【請求項5】
前記危険度評価手段は、前記危険度評価対象区間に関する前記道路情報に基づいた曲率半径と、前記重心位置関連情報と、前記危険度評価位置での車速に基づいた前記車両に作用する遠心力に基づいて前記車両の安全限界速度を算出し、
前記提示手段は、前記安全限界速度を提示することを特徴とする請求項1乃至請求項4のうちいずれか1項に記載の車両走行危険度評価システム。
【請求項6】
前記提示手段は、前記危険度評価位置の車速が前記安全限界速度を超えている場合、警報情報を提示することを特徴とする請求項5に記載の車両走行危険度評価システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−38238(P2012−38238A)
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願番号】特願2010−180170(P2010−180170)
【出願日】平成22年8月11日(2010.8.11)
【出願人】(000208444)大和製衡株式会社 (535)
【Fターム(参考)】
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願日】平成22年8月11日(2010.8.11)
【出願人】(000208444)大和製衡株式会社 (535)
【Fターム(参考)】
[ Back to top ]