
車両走行支援装置,交通指示機の通行/停止指示状態予測方法および待ち時間予測方法ならびに車両走行支援システム
【課題】走行中の車両が前方の交通指示機を通過する時点での指示状態を予測できるようにする。
【解決手段】車両の通行/停止を指示する交通指示機であって、走行経路の延長上にそなえられた交通指示機を特定する交通指示機特定部42aと、交通指示機特定部42aで特定した交通指示機を該車両が通過する時刻を予測する通過時刻予測部42bと、交通指示機特定部42aで特定した交通指示機の指示が切り替わるスケジュール情報を取得するスケジュール情報取得部42cと、通過時刻予測部42bで予測された時刻およびスケジュール情報取得部42cで取得したスケジュール情報に基づいて、交通指示機特定部42aで特定した交通指示機についての該通行/停止指示状態の予測を行ない、該予測の結果を出力する予測結果出力部42dと、をそなえる。
【解決手段】車両の通行/停止を指示する交通指示機であって、走行経路の延長上にそなえられた交通指示機を特定する交通指示機特定部42aと、交通指示機特定部42aで特定した交通指示機を該車両が通過する時刻を予測する通過時刻予測部42bと、交通指示機特定部42aで特定した交通指示機の指示が切り替わるスケジュール情報を取得するスケジュール情報取得部42cと、通過時刻予測部42bで予測された時刻およびスケジュール情報取得部42cで取得したスケジュール情報に基づいて、交通指示機特定部42aで特定した交通指示機についての該通行/停止指示状態の予測を行ない、該予測の結果を出力する予測結果出力部42dと、をそなえる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両走行支援装置,交通指示機の通行/停止指示状態予測方法および待ち時間予測方法ならびに車両走行支援システムに関する。
【背景技術】
【0002】
道路交通においては、車両は、通行/停止を自動で指示する交通指示機によって管制を受けている。例えば、交差点等に設けられた信号機の点灯色が、予め定められたスケジュールに従って自動的に切り替わることにより、道路上の車両等の進行又は停止が管制されるようになっている。又、電車の線路と交差する箇所においては、踏切遮断機によって車両等の進行又は停止が管制されるようになっている。
【0003】
従来より、車両の運転に有用な、道路上の信号機に関する情報を運転者に提示して、効率的かつ快適な運転を支援する様々な技術が提案されている。
たとえば、特許文献1には、信号機の点灯状態を車両に搭載された表示器を通じて表示する技術について記載されている。又、特許文献2には、交差点などで従うべき信号機を案内するナビゲーション装置について記載されている。更に、特許文献3には、自車位置と信号機との間の障害物などに影響されずに進行方向の信号機の制御情報を車内に表示する技術について記載されている。
【0004】
加えて、特許文献4には、ナビゲーション装置における表示画面上に位置する信号機を実際に設置されている信号機の形態で表示する技術について記載され、特許文献5には、赤信号により信号待ちで停車している車両に対して信号機の信号制御情報を伝え、停車している車両においては赤信号の残り時間についてディスプレイ表示する技術について記載されている。
【特許文献1】特開平11−288497号公報
【特許文献2】特開2004−163353号公報
【特許文献3】特開平11−306492号公報
【特許文献4】特開2001−208556号公報
【特許文献5】特開2001−188991号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、前方の信号機の信号状態が青と確認できている場合においても、その信号機に近づいたときに赤に変わることが予測される旨の情報を運転者や乗員に予め提供することで、運転の効率性や車両による移動の快適性が更に向上することが期待できるものである。
特に、道路状況が順調でありスムーズな走行を行っている車両の運転者においては、直近の信号機が青信号であれば当該信号機は通過可能なことは明白な場合には、運転者の注意は、直近の信号機の次に遭遇する信号機の位置に到達するときにその信号機の信号状態が青か否か、言い換えれば直近の信号機のみならず次なる信号機についても、現在の走行状態を保ったまま通過できるか否かに向くものである。直近の信号機のみならず次なる信号機の状態についても、近づいた時の信号状態の予測情報を提供することで、運転の効率性や快適性の更なる向上が期待できる。
【0006】
また、前方の信号機の信号状態が赤信号であり、信号機により停止の管制を受けている状態においては、当該信号機の赤信号の残り時間のみでは、道路交通状況により、果たして次の青信号によって当該信号機を通過できるかは不明である。この場合においては、運転の効率性や移動の快適性を更に向上させるためにも、当該信号機を実際に通過できるまでの時間を、道路交通状況に応じて予測できるようにすることが望ましい。
【0007】
しかしながら、これらの特許文献1〜5に記載された技術においては、上述したような、走行中の車両が前方の信号機を通過する時点での信号機状態を予測する技術や、信号機により停止の管制を受けている状態において当該信号機を実際に通過できるまでの時間を、道路交通状況に応じて予測する技術についてまでは記載されていない。
本発明は、このような課題に鑑み創案されたもので、走行中の車両が前方の交通指示機を通過する時点での指示状態を予測できるようにすることを目的とする。
【0008】
また、交通指示機により停止の管制を受けている状態において当該交通指示機を実際に通過できるまでの時間を、道路交通状況に応じて予測できるようにすることを目的とする。
【課題を解決するための手段】
【0009】
このため、本発明の車両走行支援装置は、道路上に設置されて車両の通行/停止を指示する交通指示機による指示状態に従った交通予測を行なうことにより、該車両の走行支援を行なう車両走行支援装置であって、車両の位置とともに該車両の進行方向について認識する位置方向認識部と、該位置方向認識部において認識した該車両の進行方向の先にそなえられた交通指示機の切り替えスケジュールおよび当該交通指示機を該車両が通過する予測時刻に基づいて、該車両が当該交通指示機を通過する際の当該交通指示機の通行/停止指示状態を予測する通行/停止指示予測部と、をそなえ、該通行/停止指示予測部は、該車両の通行/停止を指示する交通指示機であって、該位置方向認識部において認識した走行経路の延長上にそなえられた交通指示機を特定する交通指示機特定部と、該交通指示機特定部で特定した交通指示機を該車両が通過する時刻を予測する通過時刻予測部と、該交通指示機特定部で特定した交通指示機の指示が切り替わるスケジュール情報を取得するスケジュール情報取得部と、該通過時刻予測部で予測された時刻および該スケジュール情報取得部で取得した該スケジュール情報に基づいて、該交通指示機特定部で特定した交通指示機についての該通行/停止指示状態の予測を行ない、該予測の結果を出力する予測結果出力部と、をそなえたことを特徴としている。
【0010】
この場合においては、好ましくは、該通過時刻予測部は、該交通指示機特定部で特定した交通指示機と、該位置方向認識部で認識した該車両の位置と、の距離を算出する距離算出部と、該車両の走行速度および加速度について検出する速度情報検出部と、該距離算出部からの算出結果および該速度情報検出部での検出結果に基づいて、該交通指示機特定部で特定した交通指示機を該車両が通過する予測時刻を算出する予測時刻算出部と、をそなえることができる。
【0011】
さらに、該位置方向認識部で認識された現在位置とともに該車両の周辺の地図表示の表示制御を行なう表示制御部をそなえ、該表示制御部は、該地図表示された範囲における、該車両の進行方向の先にそなえられた該交通指示機についての通行/停止指示状態の予測結果を該通行/停止指示予測部から受け取って、該予測結果について表示制御することとしてもよい。
【0012】
また、該通行/停止指示予測部は、該車両が最初に遭遇する交通指示機とともに、該交通指示機を通過した次に辿る可能性のある経路上にそなえられた交通指示機についての通行/停止指示状態についても、並行して予測することとしてもよい。この場合においては、該通行/停止指示予測部は、次に遭遇する信号を予測するにあたり、最初に遭遇する信号の状態を加味して予測することもできる。
【0013】
さらに、道路上に設置されて車両の通行/停止を指示する交通指示機による指示状態に従った交通予測を行なうことにより、該車両の走行支援を行なう車両走行支援装置であって、該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示された場合において、該車両の位置、および、該車両に対して停止を指示している交通指示機の位置の相対関係について認識する相対位置関係認識部と、該停止を指示している交通指示機の切り替えスケジュールおよび該相対位置関係認識部で認識した該相対位置関係をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測する待ち時間予測部と、をそなえたことを特徴としている。
【0014】
この場合においては、該待ち時間予測部は、該相対位置関係認識部で該車両との相対位置関係を認識した交通指示機について、指示が切り替わるスケジュール情報を取得するスケジュール情報取得部と、該相対位置関係認識部で認識された該相対位置関係をもとに、当該車両の前方において、該交通指示機により進行待ちとなっている車両台数を推定する台数推定部と、該台数推定部で推定された該車両台数に応じた予測待ち時間を出力する演算部と、をそなえることとしてもよい。
【0015】
また、本発明の交通指示機の通行/停止指示状態予測方法は、車両の通行/停止を指示する交通指示機であって、該車両の進行方向の先にそなえられた該交通指示機を該車両が通過する時刻を予測し、該交通指示機の通行/停止指示が切り替わるタイミング情報を取得し、該予測された時刻および該取得したタイミング情報に基づいて、該交通指示機を該車両が通過する際の、当該交通指示機の通行/停止指示状態を予測することを特徴としている。
【0016】
さらに、本発明の待ち時間予測方法は、車両の通行/停止を指示する交通指示機であって、該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示されたことを判断し、該交通指示機により進行が停止指示されたことを判断した場合において、測位システムに基づいて該車両および該停止を指示している交通指示機の位置について認識し、該位置を認識した、該停止を指示している交通指示機と、該車両の位置と、の距離を算出し、該算出した距離をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測することを特徴としている。
【0017】
また、本発明の車両走行支援システムは、車両の通行/停止を指示する道路上に設置された交通指示機の指示内容の切り替えスケジュールを該交通指示機ごとに管理する管理装置と、車両に搭載されて、該交通指示機の指示内容の切り替えスケジュールを該管理装置から取得し該車両の走行支援を行なう車載機と、をそなえ、該車載機が、測位システムに基づいて該車両の位置とともに該車両の進行方向について認識する位置方向認識部と、該位置方向認識部において認識した該車両の進行方向の先にそなえられた交通指示機の切り替えスケジュールを該管理装置から取得して、該取得した切り替えスケジュールおよび当該交通指示機を該車両が通過する予測時刻に基づいて、該車両が当該交通指示機を通過する際の当該交通指示機の通行/停止指示状態を予測する通行/停止指示予測部と、をそなえたことを特徴としている。
【0018】
さらに、本発明の車両走行支援システムは、車両の通行/停止を指示する道路上に設置された交通指示機の指示内容の切り替えスケジュールを該交通指示機ごとに管理する管理装置と、車両に搭載されて、該交通指示機の指示内容の切り替えスケジュールを該管理装置から取得し該車両の走行支援を行なう車載機と、をそなえ、該車載機が、該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示された場合において、測位システムに基づいて該車両および該停止を指示している交通指示機の相対位置関係について認識する相対位置関係認識部と、該停止を指示している交通指示機の切り替えスケジュールを該管理装置から取得して、該取得した切り替えスケジュールおよび該相対位置関係認識部で認識した該相対位置関係をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測する待ち時間予測部と、をそなえたことを特徴としている。
【発明の効果】
【0019】
このように、本発明によれば、走行中の車両が前方の交通指示機を通過する時点での指示状態を予測できるので、運転の効率性や快適性を向上させることができる利点がある。
また、交通指示機により停止の管制を受けている状態において当該交通指示機を実際に通過できるまでの時間を、前方の待ち台数のごとき道路交通状況に応じて予測できるので、運転の効率性や移動の快適性を向上させることができる利点がある。
【発明を実施するための最良の形態】
【0020】
以下、図面を参照することにより、本発明の実施の形態について説明する。
なお、上述の本願発明の目的のほか、他の技術的課題,その技術的課題を解決する手段及び作用効果についても、以下の実施の形態による開示によって明らかとなる。
〔A〕本発明の一実施形態の説明
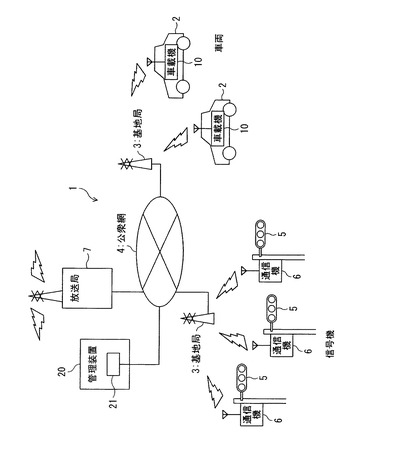
図2は、本発明の一実施形態にかかる車両走行支援装置10が適用された車両走行支援システム1を示すブロック図である。この図2に示す車両走行支援システム1は、各車両2に搭載された車載機10と、管理装置(サーバ)20と、からなる。車載機10は、管理装置20から受け取る情報をもとに車両の走行支援を行なう車両走行支援装置である。
【0021】
すなわち、車両2が通行する道路に設置される信号機その他踏切遮断機等の、車両の通行/停止を指示する交通指示機5(図中においては信号機として示している)に関する情報を管理装置20において管理しておく。そして、車両走行支援装置としての車載機10が、管理装置20から上述の交通指示機5についての情報をもとに、交通指示機による指示状態に従った交通予測を行なうことにより、車両の走行支援を行なうようになっている。
【0022】
また、各車両2に搭載された車載機10との間で無線通信を行ないうる基地局3がエリア毎に分配配置されるとともに、それぞれの基地局3は更に公衆網4に接続されており、これにより、上述の各車両2の車載機10と管理装置20とが、基地局3および公衆網4を介して個別に通信を行なうことができるようになっている。
また、各交通指示機5には、それぞれ例えば基地局3と無線通信を行なうための通信機6が付設され、各交通指示機5に付設された通信機6についても、基地局3および公衆網4を介することにより、上述の管理装置20と個別に通信を行なうことができるようになっている。尚、7は放送局である。
【0023】
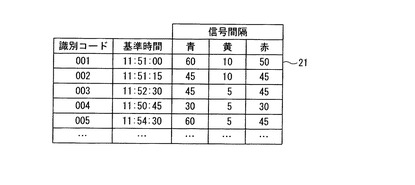
ここで、管理装置20は、図示しないプロセッサ、記憶装置とともに、公衆網4を通じた通信を行なうための通信機等をそなえて構成され、上述の交通指示機5の指示内容の切り替えスケジュール(即ち通行/停止の指示を行なう時間情報)を例えば図3に示すようなデータベース21により交通指示機5ごとに管理するものである。
ここで、この図3に示すデータベース21においては、交通指示機5ごとに識別コードが割り当てられて、この識別コードが割り当てられた交通指示機5ごとの指示内容の切り替えスケジュールについて記憶、管理されている。
【0024】
具体的には、信号機としての交通指示機5の指示内容の切り替えスケジュールとしては、基準時間の情報とともに、信号間隔についての情報、即ち青信号,黄信号および赤信号の点灯時間について記憶されるようになっている。言い換えれば、任意の時刻の信号機(交通指示機)5の点灯色は、データベース21にて管理されている上述の基準時間から信号間隔の時間情報を用いて導出することができるようになる。
【0025】
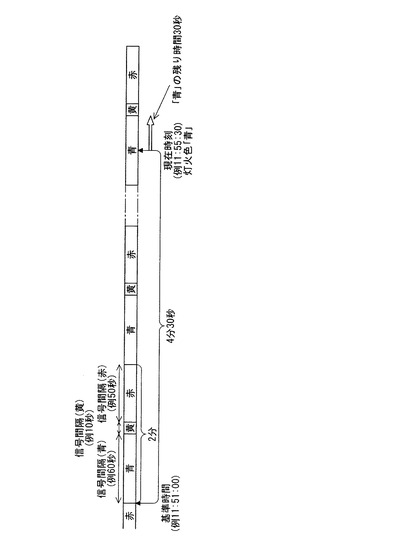
たとえば、図3に示すように、識別コード「001」が付された信号機(交通指示機)5は、基準時間「11時51分00秒」を起点として、60秒間の青信号、10秒間の黄信号および50秒間の赤信号が順次切り替わるようになっている。例えば、現在時刻が、基準時間「11時51分00秒」から4分30秒後の「11時55分30秒」である場合には、図4に示すように、現在の信号機の灯火色は「青」であり、「青」の状態が継続する残り時間は30秒であることを導出することができるようになる。
【0026】
後述する車載機10においては、管理装置20から、データベース21にて蓄積されている内容から必要な交通指示機5についての指示内容の切り替えスケジュールの情報を受け取って、車両走行支援に用いることができるようになっている。
また、信号機としての交通指示機5においては、上述のデータベース21の内容に相当するタイムテーブルをそなえるとともに、現在時刻を計時する時計をそなえ、タイムテーブルの内容に従った信号点灯色の切り替えが行われるようになっている。
【0027】
しかしながら、時間帯によって交通量が増減するような地点に設置された信号機では、時間帯に応じて指示内容の切り替え周期が可変に設定されている場合がある。更には、基準時間と信号間隔の情報を管理していても、データベース21の内容から導き出される指示内容の切り替わりのタイミングと実際の指示内容の切り替わりのタイミングとのずれが蓄積していくことも考えられる。
【0028】
このような場合に対応するため、信号機としての交通指示機5では、内部カウンタをそなえ、カウント値に基づく一定周期において、点灯状態を切り替える基準となる基準時間を更新する。又、タイムテーブルに時間帯毎の信号間隔が記憶されている場合には、基準時間の更新と併せ、時間帯ごとの信号間隔に従って、点灯状態が切り替わる信号間隔についても更新することができる。
【0029】
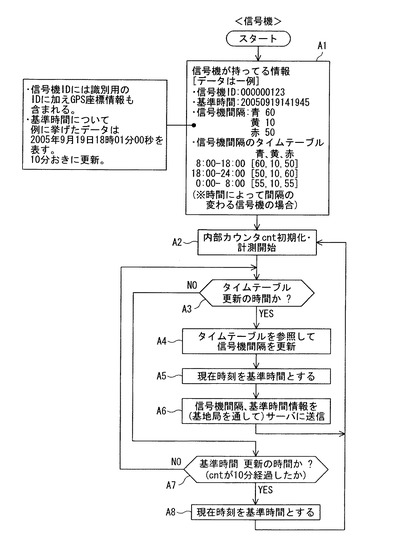
たとえば、図5に示すように、信号機としての交通指示機5では、点灯状態を切り替えるための基準となるタイムテーブルを、データベース21に登録すべき切り替えスケジュールの情報に対応する情報により保持しておく(ステップA1)。
この場合においては、データベース21に保持される識別コードに相当する、当該信号機ID「000000123」,基準時間「2005年9月19日18時01分00秒」および時間帯(8時〜18時,18時〜24時,0時〜8時)毎の信号間隔について保持する。信号間隔は、青,黄および赤の点灯時間の周期をいうものであり、例えばこの図5に示すように、8時〜18時では青,黄および赤はそれぞれ、60秒,10秒および50秒であり、18時〜24時ではそれぞれ、50秒,10秒および60秒であり、0時〜8時ではそれぞれ、50秒,10秒および55秒である。
【0030】
そして、信号機としての交通指示機5では、内部カウンタを初期化させて、カウント値計時を開始する(ステップA2)。このカウント値をもとに、信号間隔を更新する時間帯が移っていなくても、タイムテーブルに書き込まれている基準時間を更新する周期を管理する(ステップA3のNOルート,ステップA7のYESルートからステップA8)。即ち、内部カウンタのカウント値に基づいて、例えば10分に相当するカウント値となった場合には、タイムテーブルの基準時間を、計時された現在時刻に変更する。
【0031】
ここで、時計にて計時される現在時刻が信号間隔を更新すべき時間帯に移った場合、タイムテーブルの内容を参照することにより、信号機の点灯色の切り替え周期を、タイムテーブルに記憶されている信号間隔となるように変更するとともに(ステップA4)、基準時間についても現在時刻に変更する(ステップA5)。そして、このように変更された基準時間および信号間隔の情報について、通信機6を通じて、更新情報として管理装置20に送信する(ステップA6)。
【0032】
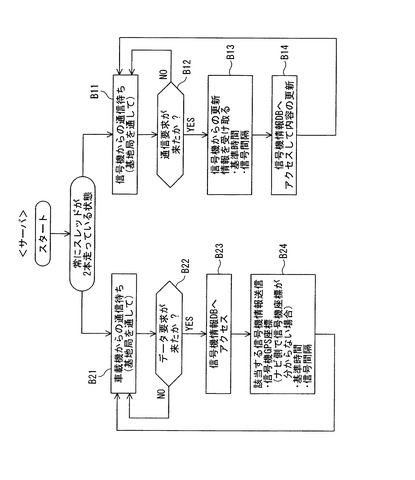
上述の通信機6からの更新情報を管理装置20において受け取ると、管理装置20では、データベース21の内容を更新する。例えば、図6に示すように、管理装置20の運用中においては通信機6を通じた交通指示機5の指示内容の切り替えスケジュールについての更新を常時受け付けている状態にある(ステップB11、ステップB12のNOルート)。そして、ある交通指示機5に付設されている通信機6から通信要求があった場合には、その通信機6における交通指示機5における指示内容の切り替えスケジュールについての更新情報を受け取る(ステップB13)。これにより、管理装置20では、受け取った更新情報の内容に従ってデータベース21を更新することができる(ステップB14)。
【0033】
なお、踏切遮断機としての交通指示機5の指示内容の切り替えスケジュールとしては、信号機のような一定周期的な切り替わりではなく、いうまでもなく該当踏切箇所の電車通過時刻に合わせたタイムテーブル構成としてデータベース21で管理することができる。
ところで、管理装置20においては、上述のごとく管理されている交通指示機5の指示内容の切り替えスケジュールについて、各車両2の車載機10から問い合わせがあった場合には、問い合わせに応じた交通指示機5についての指示内容の切り替えスケジュールについて当該車載機10に応答することができるようになっている。
【0034】
たとえば、図6に示すように、管理装置20の運用中においては常時各車両2の車載機10からの問い合わせを受け付けている状態にある(ステップB21、ステップB22のNOルート)。そして、ある車両2の車載機10から、当該車両2の位置および進行方向の先にある交通指示機5についての指示内容の切り替えスケジュールの問い合わせがあった場合には(ステップB22のYESルート)、データベース21を参照することにより(ステップB23)、該当交通指示機5についての指示内容の切り替えスケジュール(信号機の場合には基準時間および信号間隔)について応答する(ステップB24)。
【0035】
なお、後述するように、管理装置20において切り替えスケジュールを応答する対象となる交通指示機5は、当該車両2の直近の交通指示機5に限定されるものではない。即ち、管理装置20では、当該車両2が直近の交通指示機5を通過した次に辿る可能性のある経路上にそなえられた交通指示機5についても、指示内容の切り替えスケジュールを応答することができるようになっている。
【0036】
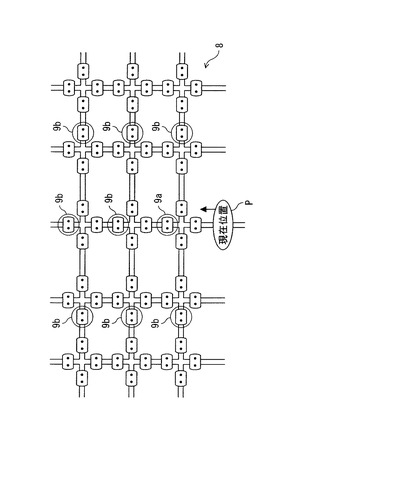
たとえば、図7に示すような、網目状レイアウトの道路配置8を有し、十字路となる各交差点に4つの信号機(交通指示機)が設置された地区において、位置Pを現在位置として図中上向きの進行方向で車両が走行しているときに、当該車両の車載機から管理装置20への問い合わせがあった場合を想定する。この場合には、管理装置20では、当該車両の直近の信号機9aのみならず、信号機9aを通過した次に辿る可能性のある信号機9bについても、指示内容の切り替えスケジュールを識別コードとともに応答することができる。
【0037】
なお、この場合においては、応答を行なう信号機9bの範囲としては、車両2に搭載されるモニタ画面に表示されるナビゲーション画面をなす地図表示範囲に含まれる信号機であって、現在位置から1回の右折/左折によって最初に遭遇する可能性のある信号機であることを条件に範囲を設定している。
ところで、図2に示す車両2に搭載された車載機10は、オーディオビジュアル(AV)機能とナビゲーション機能とを兼ね備えた装置として構成されるものであり、このために、例えば図8に示すような構成をそなえている。
【0038】
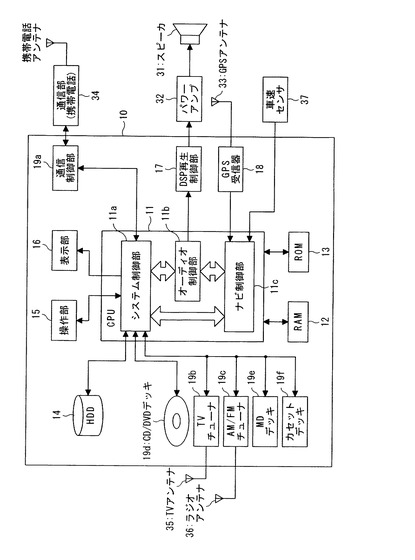
この図8に示す車載機10は、CPU(Central Processing Unit)11,RAM(Random Access Memory)12,ROM(Read Only Memory)13およびHDD(Hard Disk Drive)14をそなえるとともに、オペレータによる入力操作を受け付ける操作部15,ディスプレイ表示を行なう表示部16,スピーカ31での音再生についてパワーアンプ32を介して制御するDSP再生制御部17,図示しないGPS(Global Positioning System)衛星等からの信号についてGPSアンテナ33を介して受信するGPS受信部18をそなえている。尚、19aは例えばリモートコントローラ機能を持つ携帯電話34との通信を行なうための通信制御部である。
【0039】
さらに、車載機10にはTVアンテナ35からのテレビジョン放送信号を受信するTVチューナ19b,ラジオアンテナ36からのラジオ放送信号を受信するAM/FMチューナ19cのほか、CD/DVDデッキ19d,MDデッキ19eおよびカセットデッキ19fが適宜そなえられる。
また、CPU11は、上述のHDD14,表示部15,操作部16,通信制御部19a,チューナ19b,19cおよびデッキ19d〜19fについての制御を行なうシステム制御部11aと、DSP再生制御部17に対する制御を行なうオーディオ制御部11bと、をそなえるとともに、GPS受信器18および車速センサ37からの信号を取り込んで、車両走行のためのナビゲーション制御を行なうナビ制御部11cをそなえている。
【0040】
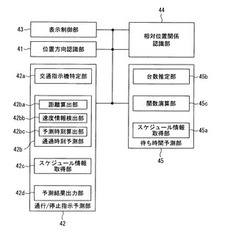
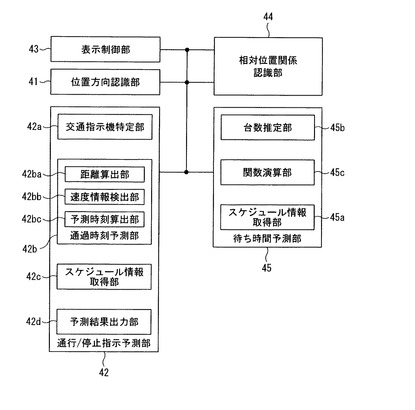
図1は上述のCPU11での処理を通じて実現する、本願発明の特徴的機能に着目して示す図である。車載機10は、交通指示機5による指示状態に従った交通予測を行なうことにより、車両2の走行支援を行なうものである。このために、図1に示すように、車載機10は、CPU11での処理を通じて、位置方向認識部41,通行/停止指示予測部42,表示制御部43,相対位置関係認識部44および待ち時間予測部45としての機能ををそなえている。
【0041】
ここで、位置方向認識部41および通行/停止指示予測部42は、主として車両2が進行状態にある場合において、前方の信号機等の交通指示機5に車両2が通過するときの交通指示機5の指示状態を予測するためのものである。この指示状態の予測によって、車両2が交通指示機5に接近したときに、交通指示機5手前で減速することなく交通指示機5を通過できるか否かの判断材料を、走行支援のために提供することができる。
【0042】
また、相対位置関係認識部44および待ち時間予測部45は、前方の交通指示機5の停止指示により、車両2を停止させている場合において、停止指示が解除されて交通指示機5を通過できるまでの時間を予測するものである。この交通指示機5を通過できるまでの時間の予測によって、苛立ち等の無用な運転者の不快感が生じることを抑制し、快適な走行を支援することができる。
【0043】
位置方向認識部41は、測位システムに基づいて車両2の位置とともに車両2の進行方向について認識するものである。本実施形態における測位システムは、例えばGPS衛星等からの信号をGPS受信器18で受信しこの受信信号から車両2の位置を測定するものである。
また、通行/停止指示予測部42は、位置方向認識部41において認識した車両2の進行方向の先にそなえられた交通指示機5の切り換えスケジュールおよび当該交通指示機5を車両2が通過する予測時刻に基づいて、車両2が当該交通指示機5を通過する際の当該交通指示機5の通行/停止指示状態を予測する。即ち、交通指示機5が信号機であれば、青,黄又は赤の灯火色を予測し、踏切遮断機であれば遮断機が上がっているか下がっているかを予測する。
【0044】
なお、車両2の通過時点での通行/停止指示状態を予測する対象となる交通指示機5には、後述するように、直近の交通指示機(即ち現在位置からの走行で最初に遭遇することとなる交通指示機)5のみならず、交通指示機5を通過した次に辿る可能性のある交通指示機5についても、所定の範囲内において含めることができる。
換言すれば、通行/停止指示予測部42は、車両2が最初に遭遇する交通指示機5とともに、交通指示機5を通過した次に辿る可能性のある経路上にそなえられた交通指示機5についての通行/停止指示状態についても、並行して予測することができる。又、通行/停止指示予測部42においては、所定時間周期ごとに通行/停止指示状態を予測することができる。即ち、刻々と変化する、車両2と交通指示機5との相対位置関係や交通指示機5の指示状態に追従すべく、例えば1秒周期等の所定周期で通行/停止指示状態を予測する。
【0045】
さらに、表示制御部43は、位置方向認識部41で認識された現在位置とともに、車両2の周辺の地図表示の表示制御を行なうものであり、特に、この表示制御部43の機能は主として前述のシステム制御部11aおよびナビ制御部11cで実現する。
また、上述の通行/停止指示予測部42は、交通指示機特定部42a,通過時刻予測部42b,スケジュール情報取得部42cおよび予測結果出力部42dとしての機能をそなえている。
【0046】
交通指示機特定部42aは、位置方向認識部41において認識した当該車両2の走行経路の延長上にそなえられた交通指示機5を特定する。この交通指示機特定部42aで特定した交通指示機5を対象として、車両2が該当交通指示機5を通過する時刻を続いて予測する。例えば前述の図7に示す現在位置Pにある車両2についてみれば、信号機9a,9bを、当該車両2の走行経路の延長上にそなえられた交通指示機5として特定する。
【0047】
また、通過時刻予測部42bは、交通指示機特定部42aで特定した交通指示機5を車両2が通過する時刻を予測する。即ち、交通指示機特定部42aで特定された交通指示機5を車両2が通過する際の通行/停止指示状態を予測するためのパラメータとして、対象交通指示機5を車両2が通過する予測時刻を演算により算出する。更に、スケジュール情報取得部42cは、管理装置20との通信を通じて、交通指示機特定部42aで特定した交通指示機5の指示内容が切り替わるスケジュール情報を取得する(図6のステップB21〜B24参照)。
【0048】
予測結果出力部42dは、通過時刻予測部42bで予測された時刻およびスケジュール情報取得部42cで取得した該スケジュール情報に基づいて、該交通指示機特定部で特定した交通指示機についての該通行/停止指示状態の予測を行ない、予測の結果を表示部16での表示等を行なうために出力する。
なお、上述の交通指示機特定部42aで特定した交通指示機5が複数ある場合には、個々の交通指示機5ごとに、上述の通過時刻予測部42bで通過時刻を予測し、スケジュール情報取得部42cで該当する交通指示機5でのスケジュール情報を取得し、予測結果出力部42dで予測結果を出力する。
【0049】
これにより、表示制御部43においては、表示部16において地図表示された範囲における、車両2の進行方向の先にそなえられた交通指示機5についての通行/停止指示状態の予測結果を、通行/停止指示予測部42をなす予測結果出力部42dから受け取って、予測結果について表示制御する。具体的には、例えば地図表示上の該当交通指示機5の位置に交通指示機5の指示態様に応じたアイコン表示により表示すべく表示部16を制御する。例えば、交通指示機5が信号機であれば予測された指示内容にかかる点灯状態を表す信号機デザインが表示される。
【0050】
また、上述の通過時刻予測部42bは、交通指示機特定部42aで特定した交通指示機5を車両2が通過する時刻を予測するため、距離算出部42ba,速度情報検出部42bbおよび予測時刻算出部42bcとしての機能を有している。距離算出部42baは、交通指示機特定部42aで特定した交通指示機5と、位置方向認識部41で認識した車両2の位置と、の距離を算出する。
【0051】
また、速度情報検出部42bbは、車速センサ37からの信号に基づいて、車両2の走行速度および加速度について検出する。更に、予測時刻算出部42bcは、距離算出部42baからの算出結果および速度情報検出部42bbでの検出結果に基づいて、交通指示機特定部42aで特定した交通指示機5を車両2が通過する予測時刻を算出する。
さらに、相対位置関係認識部44は、道路上の車両2の進行方向の先にそなえられた交通指示機5により進行が停止指示された場合において、測位システムに基づいて車両2の位置、および、車両に対して停止を指示している交通指示機5の位置の相対関係について認識する。具体的には、停止状態にある車両2の現在位置と、停止指示を行なっている交通指示機5との位置をGPS座標等で認識し、これらの位置関係から車両2と交通指示機5との距離を算出する。
【0052】
また、待ち時間予測部45は、上述の停止を指示している交通指示機5の切り換えスケジュールおよび相対位置関係認識部44で認識した相対位置関係をもとに、当該車両2が、停止を指示している交通指示機5を通過するまでの待ち時間を予測する。この待ち時間予測部45は、スケジュール情報取得部45a,台数推定部45bおよび関数演算部45cとしての機能をそなえている。
【0053】
スケジュール情報取得部45aは、相対位置関係認識部44で車両2との相対位置関係を認識した交通指示機5について、指示が切り替わるスケジュール情報を取得する。尚、このスケジュール情報取得部45aは、前述の通行/停止指示予測部42のスケジュール情報取得部42cとは異なり、車両2が停止指示を直接受けている直近の交通指示機5による指示が切り替わるスケジュール情報を管理装置20との通信を通じて取得する(図6のステップB21〜B24参照)。
【0054】
また、台数推定部45bは、相対位置関係認識部44で上述のごとく認識した相対位置関係をもとに、当該車両2の前方において、停止指示を行なっている交通指示機5により進行待ちとなっている車両台数を推定する。具体的には、相対位置関係認識部44でもとられた、車両2と対象交通指示機5との相対距離を、停車時の一台分の車間距離で除算することにより、得られる商の値を、車両2の前方において進行待ちとなっている車両台数と推定する。
【0055】
さらに、関数演算部45cは、台数推定部45bで推定された進行待ちの車両台数に応じた予測待ち時間について、関数演算により算出し出力する。この関数は、当該車両2の前方で進行待ちとなっている車両台数と、対象交通指示機5による通行指示の時間および停止指示の時間との関係をパラメータとして与えられた、当該車両2が対象交通指示機5を通過するまでの時間についての関数である。
【0056】
上述のごとく構成された車載機10が搭載された車両2においては、道路の走行中においては信号機等の交通指示機5により、その都度通行/停止の指示を受ける。このとき、位置方向認識部41および通行/停止指示予測部42により、例えば図9のフローチャートに従って、車両2が進行状態にある場合における、前方の信号機等の交通指示機5に車両2が通過するときの交通指示機5の指示状態を予測する。
【0057】
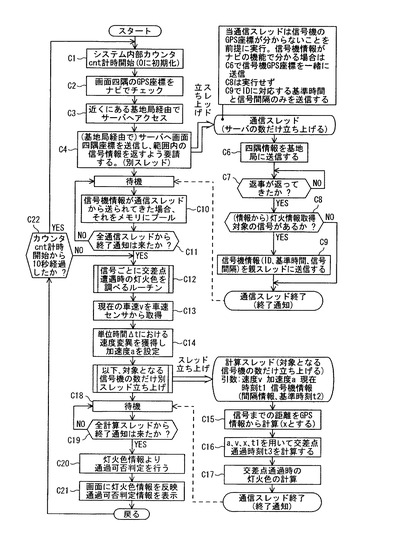
すなわち、内部カウンタをカウント値「0」に初期化させて、カウント値計時を開始する(ステップC1)。このカウント値をもとに、例えば10秒ごとの所定周期で、前方の交通指示機5を特定して、特定した交通信号機5を車両2が通過するときの指示内容について予測を行なっている。
まず、位置方向認識部41としての機能により車両2の現在位置および進行方向を認識する。即ち、車載機10におけるナビ制御部11c(図8参照)において、GPS受信器18で受信したGPS信号をもとに、車両2のGPS座標を位置情報として特定するとともに、進行方向を特定する。そして、システム制御部11aで、位置情報として特定した周辺の地図とともに表示部16で表示すべく表示部16を制御している。
【0058】
そして、この表示部16で表示される画面上の四隅のGPS座標を求め(ステップC2)、つぎに、車載機10においては、管理装置20へのアクセスを行なうことを通じ(ステップC3)、進行方向の先に存在する交通指示機5について特定するとともに、特定した交通指示機5の指示内容の切り替えスケジュールを取得する(ステップC4からステップC6〜ステップC9による通信スレッド)。
【0059】
換言すれば、交通指示機特定部42aとしての機能により、車両の現在位置とともに表示部16で表示されている地図範囲内において上述の指示状態の予測を行なう交通指示機5を特定し、スケジュール情報取得部42cとしての機能により、データベース21に記憶されている、指示状態の予測を行なう交通指示機5についての指示状態の切り替えスケジュールを取得する。
【0060】
ここで、交通指示機特定部42aにおいては、対象となる交通指示機5のGPS座標をHDD14の検索等により抽出する。この抽出ができない場合には、このGPS座標についても管理装置20に問い合わせて取得し、これにより、予測対象の交通指示機5の特定を行なう。
具体的には、地図表示画面の四隅のGPS座標を基地局3に送信し(ステップC6)、この画面表示の四隅の範囲内に位置する交通指示機5のGPS座標を管理装置20に問い合わせるとともに、併せてその交通指示機5における指示内容の切り替えスケジュールについても問い合わせを行ない、管理装置20からの応答受信の待機に入る(ステップC7のNOルート)。
【0061】
なお、管理装置20においては、データベース21を参照して、前述の画面表示の四隅の範囲内に位置する交通指示機5のGPS座標を取り出すとともに、指示内容の切り替えスケジュールについても取り出して、問い合わせを行なった車載機10に返信する(図6のステップB24参照)。
管理装置20からの応答信号に(ステップC7のYESルート)、当該車両2の進行方向の先に設置された、切り替え指示の予測対象となる交通指示機5についての切り替えスケジュールの情報が含まれている場合には(ステップC8のYESルート、ステップC9)、これらの情報について、RAM12にプールする(ステップC10)。
【0062】
また、管理装置20からの応答信号から、進行方向の先の画面内に、交通指示機5が存在しない場合等、切り替え対象となる交通指示機5が存在しないことが判明した場合には、終了を通知する(ステップC8のNOルート)。
また、切り替え指示の予測対象となる交通指示機5のGPS座標が、車載機10自身のHDD14等の記憶媒体に記憶されていて判明している場合には、ステップC6では四隅のGPS座標を送信するとともに、対象となる交通指示機5のGPS座標についても管理装置20へ送信する。
【0063】
これにより、ステップC9においては、交通指示機特定部42aおよびスケジュール情報取得部42cとしての機能により、データベース21から取り出された信号機情報として、識別データ(ID)を,基準時間および信号間隔に関する情報を管理装置20から受け取り、ステップC10で、これをRAM12にプールする。
なお、上述の管理装置20への問い合わせは、管轄する地域ごとに管理装置20が複数そなえられているような場合には、管理装置20の設置数分行なうこととすることもできる(ステップC11)。
【0064】
つぎに、管理装置20からスケジュール情報その他位置情報を受け取った、切り替え指示の予測対象となる交通指示機5について、車両2通過時の指示内容、即ち灯火色を予測する。尚、上述の交通指示機特定部42aで特定した交通指示機5が複数ある場合には、個々の交通指示機5ごとに指示内容の予測を行なう(ステップC12)。
まず、通過時刻予測部42bにおいて、車両2が対象交通指示機5を通過する際の時刻を予測するために、車両2の現在の車速vおよび加速度aを求める。具体的には、車速センサ37(図8参照)からの検出情報をもとに、速度情報検出部42bbにおいて、現在の速度vを取得するとともに(ステップC13)、単位時間Δtにおける速度変位を、加速度aとして導出する(ステップC14)。
【0065】
ついで、距離算出部42baにおいて、指示内容の予測対象の交通指示機5ごとに、車両2の現在位置との相対距離xを、それぞれのGPS座標値から求める(ステップC15)。そして、これらの速度情報検出部42bbで求められた速度vおよび加速度aとともに、距離算出部42baで算出した相対距離xを用いることにより、予測時刻算出部42bcにおいて車両2が現在の走行状態で進行した場合の、該当交通指示機5の通過時における時刻t3を予測する(ステップC16)。
【0066】
具体的には、時刻t3については式:t3=(x/v)+t1に従って求めるが、加速度aを加味して、加速度aの符号が正、即ち加速状態にあるときには、(x/v)+t1よりも短めに、加速度aの符号が負、即ち減速状態にあるときには、(x/v)+t1よりも長めに、それぞれ設定する。更に、予測対象の交通指示機5までの経路上に他の交通指示機5があり、その交通指示機5で停まる見込みである場合には、(x/v)+t1よりも長めに設定する。
【0067】
そして、予測結果出力部42dにおいては、このように算出された予測時刻と、スケジュール情報取得部42cで取得した、該当交通指示機5の指示内容の切り替えスケジュールと、を対比して、予測時刻での指示内容、即ち灯火色を予測する(ステップC17)。
具体的には、スケジュール情報取得部42cで取得した、該当交通指示機5のスケジュール情報が、基準時間t2として「20時35分00秒」であり、信号間隔情報が、「青60秒、黄10秒、赤50秒」であり、現在時刻t1が「20時36分30秒」で、更に、通過時刻予測部42bで予測された通過予測時刻t3が「20時40分30秒」である場合を想定する。
【0068】
この場合においては、現在時刻t1では基準時間t2から90秒後である。予測灯火色を求める計算の簡単のため、現在時刻から30秒後の時刻t1′(=t1+30秒)から通過予測時刻t3までの時間t4(t3−t1′)を求める。この場合には300秒である。そして、信号間隔の合計時間t5は120秒(60+10+50)である。
ついで、灯火色の予測のために、t4÷t5の余りt6を求める。このt6の値に応じて、0≦t6≦60であれば灯火色は「青」であると予測され、60<t6≦70であれば灯火色は「黄」であると予測され、70<t6≦120であれば灯火色は「赤」であると予測される。この場合においては、t6は、300÷120の余りであるから、60である。即ち、車両2が信号機としての交通指示機5を通過するときの灯火色は「青」であると予測される。
【0069】
このような信号機による灯火色の予測が、予測対象となる全ての信号機について行われると(ステップC18、ステップC19のYESルート)、予測された結果の灯火色情報から、各信号機についての通過可否の予測を行なう。いうまでもなく、予測結果が「青」であれば、その信号機は通過可であり、「黄」,「赤」であればその信号機は通過否であると予測する(ステップC20)。
【0070】
そして、表示制御部43においては、例えば地図表示上の該当交通指示機5の位置に予測結果を反映した点灯状態を表すアイコン表示とともに、傍らに通過可又は否を示す表示(例えば○表示やX表示)を行なうべく表示部16を制御する(ステップC21)。
このような表示を行なっても、内部カウンタの値がカウント開始から10秒を経過していない場合には、再度対象信号機についての通過時の灯火色予測を行なって(ステップC22のNOルートからステップC13〜ステップC20)、通過可否を予測する(ステップC21)。又、カウント開始から10秒を経過している場合には、カウント値をリセットし、交通指示機特定部42aによる対象交通指示機5の特定に戻る(ステップC22のYESルートからステップC1)。
【0071】
なお、上述のごとき、交通指示機5の指示内容の予測処理においては、ステップC22のNOルートからステップC12〜ステップC21のループは、例えば2〜4秒程度のサイクルで行なうことができる。
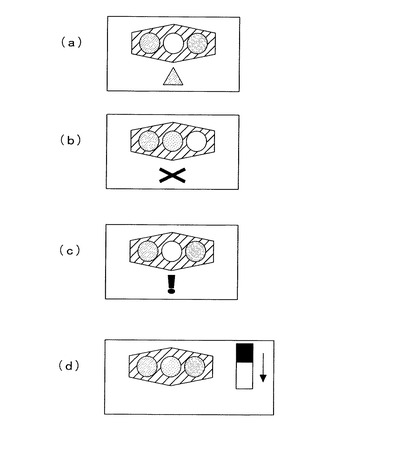
なお、青灯となることを予測する場合においては、上述のステップC21においては、上述の信号機アイコンの傍らに、当該青灯の対象となる信号機の方向を指すようなマーク、例えば図10(a)に示すような三角形マークを表示することができる。この図10(a)の場合においては三角形マークは上向きなので、自車位置から例えば北向きに進む信号が青であることが確認できる。
【0072】
また、赤灯となることを予測する場合においては、例えば図10(b)に示すように、信号機アイコンの傍らに「X」マークを表示し、更に赤灯の点滅となることを予測する場合には、信号機アイコンおよび「X」マークについても点滅するようにしてもよい。更には、このように赤灯となることを予測する場合においては、上述のごとき信号機アイコンによる強調表示のほかに、音のチャイムをならすことで、運転者に注意の喚起を与えるようにしてもよい。
【0073】
さらに、黄灯となることとなることを予測する場合においては、例えば図10(c)に示すように、上述の信号機アイコンの傍らに、「!」マークを表示し、更に黄灯の点滅となることを予測する場合には、信号機アイコンおよび「!」マークについても点滅するようにしてもよい。更には、このように黄灯となることを予測する場合においては、上述のごとき信号機アイコンによる強調表示のほかに、上述の赤灯を予測する場合よりも音量の小さい音のチャイムをならすことで、運転者に注意の喚起を与えるようにしてもよい。
【0074】
これにより、運転者に注意の喚起を与える必要度に応じて音量を可変することで、車両走行の支援のための情報を運転者に効率的に提供することができるようになる。
また、上述のごとき信号機アイコンの表示に併せ、現在の点灯状態の残り時間についてグラフ表示、例えば図10(d)に示すように棒グラフ表示を行なうこととしてもよい。上述したように、ステップC22のNOルートからステップC12〜ステップC21のループは、例えば2〜4秒程度のサイクルで行なうことができるので、この棒グラフ表示についても、2〜4秒程度のサイクルで表示内容を変更できるので、残り時間が減っていくことを棒グラフ表示から確認することが可能となる。
【0075】
さらに、上述の通行/停止指示予測部42においては、前述の図7に示す信号機9aを通過した次に遭遇する信号機9bの状態を予測するにあたっては、最初に遭遇することとなる信号機9aの状態を加味して予測することもできる。
具体的には、通過時刻予測部42bにおいて、当該通過時刻予測部42bでの信号機9aについての予測結果とスケジュール情報取得部42cにて取得されるスケジュール情報との対比に基づいて、最初に遭遇することとなる信号機9aの、赤信号による待ち時間を含めた通過予想時刻を求める。即ち、通過予想時刻は、通過時刻予測部42bで予測される信号機9aの通過時刻と、当該信号機9aでの待ち時間と、の和により求められる。尚、当該信号機9aでの待ち時間は、通過時刻予測部42bからの予測時刻とスケジュール情報取得部42cからのスケジュール情報とを対比することにより算出する。そして、通過時刻予測部42bにおいて、距離算出部42baにおいて求められているそれぞれの信号機9a,9bまでの距離をもとに、最初の信号機9aを起点とした次の信号機9bまでの走行時間を推定する。具体的には、最初の信号機9aから次の信号機9bまでの距離を算出するとともに、算出した距離を平均速度で除算し、除算結果を走行時間の推定結果とする。尚、上述の推定に用いられる平均速度としては、現在から過去の一定時間にさかのぼった走行履歴における平均の速度を求めておき、これを用いることができる。その他、現在の走行経路の道路種別(属性)についてナビゲーションシステムから取得し、その道路属性から、平均速度として計算するための値をマッピング等により一律に割り当てることとしてもよい。例えば、道路属性が1車線の一般道であれば平均速度を40km/hとし、2車線の一般道であれば50km/hとし、1車線の自動車専用道であれば60km/hとし、2車線の自動車専用道であれば70km/hとして割り当てることができる。そして、通過時刻予測部42bにおいて、このように計算された最初の信号機9aの通過予想時刻と、信号機9aおよび信号機9b間の推定走行時間と、を加算することにより、当該車両が走行している現在位置Pから、最初の信号機9aの次の信号機9bにおけるまでの通過予測時刻を算出する。予測結果出力部42dでは、このように通過時刻予測部42bで算出された信号機9bの通過予測時刻と、スケジュール情報取得部42cからのスケジュール情報とを対比することにより、通過予測時刻での指示内容、即ち灯火色を予測するのである。
【0076】
ところで、上述のごとき走行中における前方の交通指示機5の指示内容の予測に続いて、車両2が前方の交通指示機5により停止指示を受けた場合には、相対位置関係認識部44および待ち時間予測部45としての機能により、図11,図12のフローチャートに示すように、停止指示が解除されて交通指示機5を通過できるまでの時間を予測する。
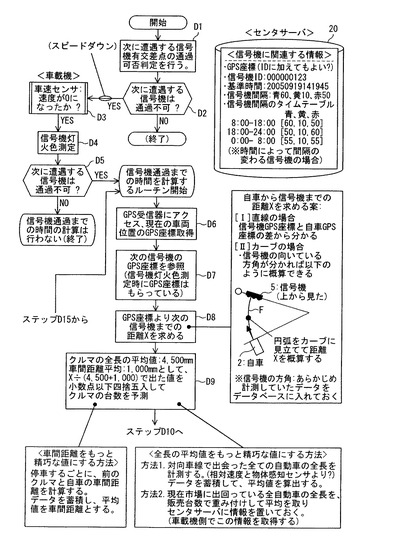
すなわち、車両2が走行中において、次に遭遇する(直近の)交通指示機5を、現在の走行状態のまま通過できるかを判定する。交通指示機5が信号機の場合には次に遭遇する信号機がある交差点を現在の走行状態のままで通過することが可能か否かを、信号機の灯火状態の予測をもとに判定する(図11のステップD1、図9のステップC20参照)。
【0077】
そして、次に遭遇する信号機が有る交差点を通過することが可であると判定された場合には、以下のような信号機通過までの時間を予測する処理には移行せずに終了する。しかし、交差点を通過することが不可である場合には(ステップD2)、その信号機の停止指示を受けて、車両は走行状態からスピードダウンして停止することになる(ステップD3のYESルート)。
【0078】
このとき、更に、車載機10においては、管理装置20から取得している信号機の指示内容の切り替えスケジュールに基づいて、現在の信号機の状態が停止指示の状態にあるか否かを判定している(ステップD4)。スピードダウンして停止したとしても、そのときに信号が青灯であれば、信号機通過までの時間計算は行なわない(ステップD5のNOルート)。しかし、現在の信号機の状態が停止指示の状態にある場合には、その信号機を通過するまでの時間を計算するルーチンに移行する(ステップD5のYESルート)。
【0079】
この信号機を通過するまでの時間を計算するルーチンにおいては、まず、相対位置関係認識部44としての機能により、GPS受信器18にアクセスし、このGPS受信器18からのGPS受信信号をもとにして、現在の車両2の位置をGPS座標として取得する(ステップD6)。そして、前述の信号機の灯火状態の予測処理の際に、交通指示機特定部42aにより取得していた、次に遭遇する信号機のGPS座標についてもRAM12を参照することにより取り出す(ステップD7)。
【0080】
さらに、この相対位置関係認識部44としての機能により、上述のごとく取り出した車両2の現在位置、および次に遭遇する信号機(対象信号機)の位置を表すGPS座標を用いることにより、自車両2から対象信号機までの距離Xを求める(ステップD8)。この距離Xを求めるにあたっては、自車両2から対象信号機までの道路軌跡に応じて適切な値が求められる手法を採用することができる。
【0081】
具体的には、自車両2から対象信号機までの道路軌跡が直線である場合には、上述のごとく取得したGPS座標を用いることにより演算により算出する。又、自車両2から対象信号機までの道路軌跡が曲線である場合には、前述の対象信号機のGPS座標を管理装置20におけるデータベース21の内容から取得する際に、併せて対象信号機の向いている方角についても取得して、自車両2の向いている方角と、対象信号機の向いている方角とから、道路軌跡を、双方の位置を通過する同心円の一部をなす円弧Fとみて、この円弧の長さを求めることにより距離Xを算出する。
【0082】
つぎに、待ち時間予測部45としての機能により、この相対位置関係認識部44での機能により算出された自車両2から対象信号機までの距離Xと、対象信号機の指示内容の切り替えスケジュールと、を用いて、自車両2が対象信号機を通過するまでの時間を予測する(D9,D10)。尚、対象信号機の指示内容の切り替えスケジュールとしては、待ち時間予測部45におけるスケジュール情報取得部45aで取得するようになっているが、通行/停止指示予測部42におけるスケジュール情報取得部42cで取得したものを流用することとしてもよい。
【0083】
まず、台数推定部45bとしての機能により、上述のごとく算出された距離Xから、自車両2の前方で対象信号機による停止指示で停止している車両の台数を推定する。例えば、クルマの全長の平均値を4500mmとし、車間距離の平均値を1000mmとして、式(1)から導出される値を台数として推定する(ステップD9)。
台数=X[mm]÷(クルマの全長の平均値+車間距離の平均値)
=X[mm]÷(4500+1000) …(1)
また、上述の式(1)での「クルマの全長の平均値」としては、上述の4500mmという値を用いるほかに、演算により求めることもできる。例えば、対向車線で出会った全ての自動車の全長を、相対速度の検出と物体感知センサの検出情報とを用いることにより計測するとともに、得られる計測データを蓄積して平均値を算出し結果の値を用いることとしてもよい。
【0084】
また、現在市場に出回っている全自動車の全長を、販売台数で重み付けして平均をとり、得られた値を、式(1)の演算の際の「クルマの全長の平均値」として、管理装置20に情報として置いておくこととしてもよい。具体的には、市場にN種類のクルマが出回っていて、それぞれのクルマがM1〜MNの台数が売れており、全長データをそれぞれL1〜LNとすると、式(2)から求められる値を、「クルマの全長の平均値」とすることができる。即ち、(全種類のクルマについての「全長×市場に出回っている台数」の和)÷(市場に出回っているクルマの合計台数)を、「クルマの全長の平均値」とするのである。
【0085】
クルマの全長の平均値=(Σ(Li×Mi))/(ΣMi) …(2)
さらに、式(1)での「車間距離の平均値」としては、上述の1000mmという値を用いるほかに、演算により求めることができる。例えば、自車両2が停車するごとに、前のクルマと自車両2との車間距離を計算し、計算された車間距離のデータを蓄積して平均をとり、得られた値を、式(1)の演算の際の「車間距離の平均値」として用いることとしてもよい。
【0086】
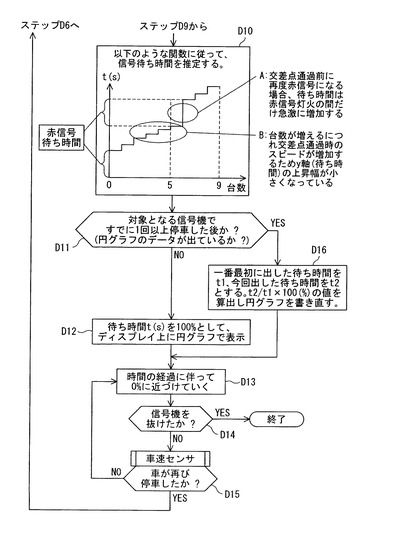
つぎに、関数演算部45cとしての機能により、図12のステップD10に示すような、式(1)から得られる台数を変数として、対象信号機の通過時間についての(ステップ状に値が変化するような)関数を定義しておき、ステップD9で求められた台数から、現在の時間から、対象信号機を通過するまでの予測時間を導出する(ステップD10)。
なお、この関数演算部45cで定義される関数としては、現在時間から対象信号機が青となるまでの待ち時間によりグラフの切片が上下し、自車両2よりも前方の待ち台数が増えるにつれ交差点通過時のスピードが増加するので、y軸(待ち時間)の上昇幅は小さくなるという特性を有する(ステップD10のB参照)。
【0087】
ただし、対象信号機の青信号の時間に起因して、自車両2よりも前方の待ち台数が所定の台数(図12の場合には6台)を超える場合には、交差点通過前に再度赤信号になる場合もある。このように交差点通過前に再度赤信号になる場合、待ち時間は、再度の赤信号灯火の間だけ急激に増加することにもなる(ステップD10のA参照)。
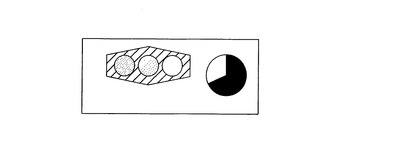
関数演算部45cで導出された、対象信号機を通過するまでの予測時間については、表示制御部43による表示部16の制御を通じて、グラフ表示、例えば図13に示すような、対象信号機を表すアイコンの傍らにおいて円グラフ表示を行なう。この場合において、関数演算部45cで導出された時間を100パーセントの比率として円グラフ表示を行ないつつ(ステップD11のNOルートからステップD12)、対象信号機の交差点を通過するまで、時間経過ごとに円グラフのメモリを0パーセントに近づけるような表示制御を行なう(ステップD13、ステップD14のNOルート、ステップD15のNOルート)。尚、関数演算部45cでの推測が正確であれば、対象信号機の交差点を通過した瞬間にグラフの値が0となる。
【0088】
ただし、自車両2が次の青信号で交差点を通過することができずに、再び停車した場合には、再度信号機通過までの時間を計算するルーチンを開始して、再度交差点通過までの時間の予測を行なう(ステップD15のYESルートからステップD6〜ステップD10)。尚、予測された通過時間をグラフ表示するにあたり、対象信号機において、すでに一回以上停車している後である場合には、表示制御部43では、一番最初に導出した待ち時間をt1、今回導出した待ち時間をt2とすると、(t2/t1)×100パーセントの値を算出して、円グラフを書き直す(ステップD11のYESルートからステップD16)。
【0089】
このように、本発明の一実施形態によれば、位置方向認識部41および通行/停止指示予測部42により、走行中の車両2が前方の交通指示機5を通過する時点での指示状態を予測できるので、運転の効率性や快適性を向上させることができる利点がある。
また、相対位置関係認識部44および待ち時間予測部45により、交通指示機5により停止の管制を受けている状態において当該交通指示機5を実際に通過できるまでの時間を、前方の待ち台数のごとき道路交通状況に応じて予測できるので、運転の効率性や移動の快適性を向上させることができる利点がある。
【0090】
〔B〕その他
上述した実施形態にかかわらず、本発明の趣旨を逸脱しない範囲において種々変形して実施することができる。
例えば、上述の実施形態においては、走行中の車両2が前方の交通指示機5を通過する時点での指示状態の予測と、交通指示機5により停止の管制を受けている状態において当該交通指示機5を実際に通過できるまでの時間の予測を、連動して行なっているが、本発明によれば、それぞれ個別に行なうこととしてもよい。この場合において、交通指示機5により停止の管制を受けている状態において当該交通指示機5を実際に通過できるまでの時間の予測を開始するにあたっては、例えば、対象信号機を特定するとともに、特定した対象信号機の現在時刻での指示内容が停止指示となったことをトリガとしたり、停止中の車内の乗員が特に通過までの時間を知りたい場合に、その旨の入力操作を操作部15(図8参照)を介して行なうことをトリガとしたりすることができる。
【0091】
また、上述した実施形態の開示により、本発明の装置を製造することは可能である。
【図面の簡単な説明】
【0092】
【図1】本発明の一実施形態における車両走行支援装置を示す機能ブロック図である。
【図2】本実施形態にかかる車両走行支援装置が適用された車両走行支援システムを示すブロック図である。
【図3】本実施形態における管理装置のデータベースを示す図である。
【図4】信号機の指示内容の切り替わりの一例を説明するための図である。
【図5】本実施形態における交通指示機としての信号機の指示内容の切り替えスケジュールの更新態様について説明するためのフローチャートである。
【図6】本実施形態における管理装置における処理を説明するためのフローチャートである。
【図7】自車両に対する指示内容の予測を行なう対象の信号機の範囲について説明するための図である。
【図8】本実施形態における車両走行支援装置としての車載機を示すハードウェアブロック図である。
【図9】本実施形態における車載機での動作を説明するためのフローチャートである。
【図10】(a)〜(d)はいずれも本実施形態における車載機の表示部での表示態様を示す図である。
【図11】本実施形態における車載機での動作を説明するためのフローチャートである。
【図12】本実施形態における車載機での動作を説明するためのフローチャートである。
【図13】本実施形態における車載機の表示部での表示態様を示す図である。
【符号の説明】
【0093】
1 車両走行支援システム
2 車両
3 基地局
4 公衆網
5 交通指示機(信号機)
6 通信機
7 放送局
8 道路配置
9a,9b 信号機
10 車載機(車両走行支援装置)
11 CPU
11a システム制御部
11b オーディオ制御部
11c ナビ制御部
12 RAM
13 ROM
14 HDD
15 操作部
16 表示部
17 DSP再生制御部
18 GPS受信部
19a 通信制御部
19b TVチューナ
19c AM/FMチューナ
19d CD/DVDデッキ
19e MDデッキ
19f カセットデッキ
20 管理装置
21 データベース
31 スピーカ
32 パワーアンプ
33 GPSアンテナ
34 携帯電話
35 TVアンテナ
36 ラジオアンテナ
37 車速センサ
41 位置方向認識部
42 通行/停止指示予測部
42a 交通指示機特定部
42b 通過時刻予測部
42ba 距離算出部
42bb 速度情報検出部
42bc 予測時刻算出部
42c スケジュール情報取得部
42d 予測結果出力部
43 表示制御部
44 相対位置関係認識部
45 待ち時間予測部
45a スケジュール情報取得部
45b 台数推定部
45c 関数演算部
【技術分野】
【0001】
本発明は、車両走行支援装置,交通指示機の通行/停止指示状態予測方法および待ち時間予測方法ならびに車両走行支援システムに関する。
【背景技術】
【0002】
道路交通においては、車両は、通行/停止を自動で指示する交通指示機によって管制を受けている。例えば、交差点等に設けられた信号機の点灯色が、予め定められたスケジュールに従って自動的に切り替わることにより、道路上の車両等の進行又は停止が管制されるようになっている。又、電車の線路と交差する箇所においては、踏切遮断機によって車両等の進行又は停止が管制されるようになっている。
【0003】
従来より、車両の運転に有用な、道路上の信号機に関する情報を運転者に提示して、効率的かつ快適な運転を支援する様々な技術が提案されている。
たとえば、特許文献1には、信号機の点灯状態を車両に搭載された表示器を通じて表示する技術について記載されている。又、特許文献2には、交差点などで従うべき信号機を案内するナビゲーション装置について記載されている。更に、特許文献3には、自車位置と信号機との間の障害物などに影響されずに進行方向の信号機の制御情報を車内に表示する技術について記載されている。
【0004】
加えて、特許文献4には、ナビゲーション装置における表示画面上に位置する信号機を実際に設置されている信号機の形態で表示する技術について記載され、特許文献5には、赤信号により信号待ちで停車している車両に対して信号機の信号制御情報を伝え、停車している車両においては赤信号の残り時間についてディスプレイ表示する技術について記載されている。
【特許文献1】特開平11−288497号公報
【特許文献2】特開2004−163353号公報
【特許文献3】特開平11−306492号公報
【特許文献4】特開2001−208556号公報
【特許文献5】特開2001−188991号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
ところで、前方の信号機の信号状態が青と確認できている場合においても、その信号機に近づいたときに赤に変わることが予測される旨の情報を運転者や乗員に予め提供することで、運転の効率性や車両による移動の快適性が更に向上することが期待できるものである。
特に、道路状況が順調でありスムーズな走行を行っている車両の運転者においては、直近の信号機が青信号であれば当該信号機は通過可能なことは明白な場合には、運転者の注意は、直近の信号機の次に遭遇する信号機の位置に到達するときにその信号機の信号状態が青か否か、言い換えれば直近の信号機のみならず次なる信号機についても、現在の走行状態を保ったまま通過できるか否かに向くものである。直近の信号機のみならず次なる信号機の状態についても、近づいた時の信号状態の予測情報を提供することで、運転の効率性や快適性の更なる向上が期待できる。
【0006】
また、前方の信号機の信号状態が赤信号であり、信号機により停止の管制を受けている状態においては、当該信号機の赤信号の残り時間のみでは、道路交通状況により、果たして次の青信号によって当該信号機を通過できるかは不明である。この場合においては、運転の効率性や移動の快適性を更に向上させるためにも、当該信号機を実際に通過できるまでの時間を、道路交通状況に応じて予測できるようにすることが望ましい。
【0007】
しかしながら、これらの特許文献1〜5に記載された技術においては、上述したような、走行中の車両が前方の信号機を通過する時点での信号機状態を予測する技術や、信号機により停止の管制を受けている状態において当該信号機を実際に通過できるまでの時間を、道路交通状況に応じて予測する技術についてまでは記載されていない。
本発明は、このような課題に鑑み創案されたもので、走行中の車両が前方の交通指示機を通過する時点での指示状態を予測できるようにすることを目的とする。
【0008】
また、交通指示機により停止の管制を受けている状態において当該交通指示機を実際に通過できるまでの時間を、道路交通状況に応じて予測できるようにすることを目的とする。
【課題を解決するための手段】
【0009】
このため、本発明の車両走行支援装置は、道路上に設置されて車両の通行/停止を指示する交通指示機による指示状態に従った交通予測を行なうことにより、該車両の走行支援を行なう車両走行支援装置であって、車両の位置とともに該車両の進行方向について認識する位置方向認識部と、該位置方向認識部において認識した該車両の進行方向の先にそなえられた交通指示機の切り替えスケジュールおよび当該交通指示機を該車両が通過する予測時刻に基づいて、該車両が当該交通指示機を通過する際の当該交通指示機の通行/停止指示状態を予測する通行/停止指示予測部と、をそなえ、該通行/停止指示予測部は、該車両の通行/停止を指示する交通指示機であって、該位置方向認識部において認識した走行経路の延長上にそなえられた交通指示機を特定する交通指示機特定部と、該交通指示機特定部で特定した交通指示機を該車両が通過する時刻を予測する通過時刻予測部と、該交通指示機特定部で特定した交通指示機の指示が切り替わるスケジュール情報を取得するスケジュール情報取得部と、該通過時刻予測部で予測された時刻および該スケジュール情報取得部で取得した該スケジュール情報に基づいて、該交通指示機特定部で特定した交通指示機についての該通行/停止指示状態の予測を行ない、該予測の結果を出力する予測結果出力部と、をそなえたことを特徴としている。
【0010】
この場合においては、好ましくは、該通過時刻予測部は、該交通指示機特定部で特定した交通指示機と、該位置方向認識部で認識した該車両の位置と、の距離を算出する距離算出部と、該車両の走行速度および加速度について検出する速度情報検出部と、該距離算出部からの算出結果および該速度情報検出部での検出結果に基づいて、該交通指示機特定部で特定した交通指示機を該車両が通過する予測時刻を算出する予測時刻算出部と、をそなえることができる。
【0011】
さらに、該位置方向認識部で認識された現在位置とともに該車両の周辺の地図表示の表示制御を行なう表示制御部をそなえ、該表示制御部は、該地図表示された範囲における、該車両の進行方向の先にそなえられた該交通指示機についての通行/停止指示状態の予測結果を該通行/停止指示予測部から受け取って、該予測結果について表示制御することとしてもよい。
【0012】
また、該通行/停止指示予測部は、該車両が最初に遭遇する交通指示機とともに、該交通指示機を通過した次に辿る可能性のある経路上にそなえられた交通指示機についての通行/停止指示状態についても、並行して予測することとしてもよい。この場合においては、該通行/停止指示予測部は、次に遭遇する信号を予測するにあたり、最初に遭遇する信号の状態を加味して予測することもできる。
【0013】
さらに、道路上に設置されて車両の通行/停止を指示する交通指示機による指示状態に従った交通予測を行なうことにより、該車両の走行支援を行なう車両走行支援装置であって、該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示された場合において、該車両の位置、および、該車両に対して停止を指示している交通指示機の位置の相対関係について認識する相対位置関係認識部と、該停止を指示している交通指示機の切り替えスケジュールおよび該相対位置関係認識部で認識した該相対位置関係をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測する待ち時間予測部と、をそなえたことを特徴としている。
【0014】
この場合においては、該待ち時間予測部は、該相対位置関係認識部で該車両との相対位置関係を認識した交通指示機について、指示が切り替わるスケジュール情報を取得するスケジュール情報取得部と、該相対位置関係認識部で認識された該相対位置関係をもとに、当該車両の前方において、該交通指示機により進行待ちとなっている車両台数を推定する台数推定部と、該台数推定部で推定された該車両台数に応じた予測待ち時間を出力する演算部と、をそなえることとしてもよい。
【0015】
また、本発明の交通指示機の通行/停止指示状態予測方法は、車両の通行/停止を指示する交通指示機であって、該車両の進行方向の先にそなえられた該交通指示機を該車両が通過する時刻を予測し、該交通指示機の通行/停止指示が切り替わるタイミング情報を取得し、該予測された時刻および該取得したタイミング情報に基づいて、該交通指示機を該車両が通過する際の、当該交通指示機の通行/停止指示状態を予測することを特徴としている。
【0016】
さらに、本発明の待ち時間予測方法は、車両の通行/停止を指示する交通指示機であって、該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示されたことを判断し、該交通指示機により進行が停止指示されたことを判断した場合において、測位システムに基づいて該車両および該停止を指示している交通指示機の位置について認識し、該位置を認識した、該停止を指示している交通指示機と、該車両の位置と、の距離を算出し、該算出した距離をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測することを特徴としている。
【0017】
また、本発明の車両走行支援システムは、車両の通行/停止を指示する道路上に設置された交通指示機の指示内容の切り替えスケジュールを該交通指示機ごとに管理する管理装置と、車両に搭載されて、該交通指示機の指示内容の切り替えスケジュールを該管理装置から取得し該車両の走行支援を行なう車載機と、をそなえ、該車載機が、測位システムに基づいて該車両の位置とともに該車両の進行方向について認識する位置方向認識部と、該位置方向認識部において認識した該車両の進行方向の先にそなえられた交通指示機の切り替えスケジュールを該管理装置から取得して、該取得した切り替えスケジュールおよび当該交通指示機を該車両が通過する予測時刻に基づいて、該車両が当該交通指示機を通過する際の当該交通指示機の通行/停止指示状態を予測する通行/停止指示予測部と、をそなえたことを特徴としている。
【0018】
さらに、本発明の車両走行支援システムは、車両の通行/停止を指示する道路上に設置された交通指示機の指示内容の切り替えスケジュールを該交通指示機ごとに管理する管理装置と、車両に搭載されて、該交通指示機の指示内容の切り替えスケジュールを該管理装置から取得し該車両の走行支援を行なう車載機と、をそなえ、該車載機が、該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示された場合において、測位システムに基づいて該車両および該停止を指示している交通指示機の相対位置関係について認識する相対位置関係認識部と、該停止を指示している交通指示機の切り替えスケジュールを該管理装置から取得して、該取得した切り替えスケジュールおよび該相対位置関係認識部で認識した該相対位置関係をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測する待ち時間予測部と、をそなえたことを特徴としている。
【発明の効果】
【0019】
このように、本発明によれば、走行中の車両が前方の交通指示機を通過する時点での指示状態を予測できるので、運転の効率性や快適性を向上させることができる利点がある。
また、交通指示機により停止の管制を受けている状態において当該交通指示機を実際に通過できるまでの時間を、前方の待ち台数のごとき道路交通状況に応じて予測できるので、運転の効率性や移動の快適性を向上させることができる利点がある。
【発明を実施するための最良の形態】
【0020】
以下、図面を参照することにより、本発明の実施の形態について説明する。
なお、上述の本願発明の目的のほか、他の技術的課題,その技術的課題を解決する手段及び作用効果についても、以下の実施の形態による開示によって明らかとなる。
〔A〕本発明の一実施形態の説明
図2は、本発明の一実施形態にかかる車両走行支援装置10が適用された車両走行支援システム1を示すブロック図である。この図2に示す車両走行支援システム1は、各車両2に搭載された車載機10と、管理装置(サーバ)20と、からなる。車載機10は、管理装置20から受け取る情報をもとに車両の走行支援を行なう車両走行支援装置である。
【0021】
すなわち、車両2が通行する道路に設置される信号機その他踏切遮断機等の、車両の通行/停止を指示する交通指示機5(図中においては信号機として示している)に関する情報を管理装置20において管理しておく。そして、車両走行支援装置としての車載機10が、管理装置20から上述の交通指示機5についての情報をもとに、交通指示機による指示状態に従った交通予測を行なうことにより、車両の走行支援を行なうようになっている。
【0022】
また、各車両2に搭載された車載機10との間で無線通信を行ないうる基地局3がエリア毎に分配配置されるとともに、それぞれの基地局3は更に公衆網4に接続されており、これにより、上述の各車両2の車載機10と管理装置20とが、基地局3および公衆網4を介して個別に通信を行なうことができるようになっている。
また、各交通指示機5には、それぞれ例えば基地局3と無線通信を行なうための通信機6が付設され、各交通指示機5に付設された通信機6についても、基地局3および公衆網4を介することにより、上述の管理装置20と個別に通信を行なうことができるようになっている。尚、7は放送局である。
【0023】
ここで、管理装置20は、図示しないプロセッサ、記憶装置とともに、公衆網4を通じた通信を行なうための通信機等をそなえて構成され、上述の交通指示機5の指示内容の切り替えスケジュール(即ち通行/停止の指示を行なう時間情報)を例えば図3に示すようなデータベース21により交通指示機5ごとに管理するものである。
ここで、この図3に示すデータベース21においては、交通指示機5ごとに識別コードが割り当てられて、この識別コードが割り当てられた交通指示機5ごとの指示内容の切り替えスケジュールについて記憶、管理されている。
【0024】
具体的には、信号機としての交通指示機5の指示内容の切り替えスケジュールとしては、基準時間の情報とともに、信号間隔についての情報、即ち青信号,黄信号および赤信号の点灯時間について記憶されるようになっている。言い換えれば、任意の時刻の信号機(交通指示機)5の点灯色は、データベース21にて管理されている上述の基準時間から信号間隔の時間情報を用いて導出することができるようになる。
【0025】
たとえば、図3に示すように、識別コード「001」が付された信号機(交通指示機)5は、基準時間「11時51分00秒」を起点として、60秒間の青信号、10秒間の黄信号および50秒間の赤信号が順次切り替わるようになっている。例えば、現在時刻が、基準時間「11時51分00秒」から4分30秒後の「11時55分30秒」である場合には、図4に示すように、現在の信号機の灯火色は「青」であり、「青」の状態が継続する残り時間は30秒であることを導出することができるようになる。
【0026】
後述する車載機10においては、管理装置20から、データベース21にて蓄積されている内容から必要な交通指示機5についての指示内容の切り替えスケジュールの情報を受け取って、車両走行支援に用いることができるようになっている。
また、信号機としての交通指示機5においては、上述のデータベース21の内容に相当するタイムテーブルをそなえるとともに、現在時刻を計時する時計をそなえ、タイムテーブルの内容に従った信号点灯色の切り替えが行われるようになっている。
【0027】
しかしながら、時間帯によって交通量が増減するような地点に設置された信号機では、時間帯に応じて指示内容の切り替え周期が可変に設定されている場合がある。更には、基準時間と信号間隔の情報を管理していても、データベース21の内容から導き出される指示内容の切り替わりのタイミングと実際の指示内容の切り替わりのタイミングとのずれが蓄積していくことも考えられる。
【0028】
このような場合に対応するため、信号機としての交通指示機5では、内部カウンタをそなえ、カウント値に基づく一定周期において、点灯状態を切り替える基準となる基準時間を更新する。又、タイムテーブルに時間帯毎の信号間隔が記憶されている場合には、基準時間の更新と併せ、時間帯ごとの信号間隔に従って、点灯状態が切り替わる信号間隔についても更新することができる。
【0029】
たとえば、図5に示すように、信号機としての交通指示機5では、点灯状態を切り替えるための基準となるタイムテーブルを、データベース21に登録すべき切り替えスケジュールの情報に対応する情報により保持しておく(ステップA1)。
この場合においては、データベース21に保持される識別コードに相当する、当該信号機ID「000000123」,基準時間「2005年9月19日18時01分00秒」および時間帯(8時〜18時,18時〜24時,0時〜8時)毎の信号間隔について保持する。信号間隔は、青,黄および赤の点灯時間の周期をいうものであり、例えばこの図5に示すように、8時〜18時では青,黄および赤はそれぞれ、60秒,10秒および50秒であり、18時〜24時ではそれぞれ、50秒,10秒および60秒であり、0時〜8時ではそれぞれ、50秒,10秒および55秒である。
【0030】
そして、信号機としての交通指示機5では、内部カウンタを初期化させて、カウント値計時を開始する(ステップA2)。このカウント値をもとに、信号間隔を更新する時間帯が移っていなくても、タイムテーブルに書き込まれている基準時間を更新する周期を管理する(ステップA3のNOルート,ステップA7のYESルートからステップA8)。即ち、内部カウンタのカウント値に基づいて、例えば10分に相当するカウント値となった場合には、タイムテーブルの基準時間を、計時された現在時刻に変更する。
【0031】
ここで、時計にて計時される現在時刻が信号間隔を更新すべき時間帯に移った場合、タイムテーブルの内容を参照することにより、信号機の点灯色の切り替え周期を、タイムテーブルに記憶されている信号間隔となるように変更するとともに(ステップA4)、基準時間についても現在時刻に変更する(ステップA5)。そして、このように変更された基準時間および信号間隔の情報について、通信機6を通じて、更新情報として管理装置20に送信する(ステップA6)。
【0032】
上述の通信機6からの更新情報を管理装置20において受け取ると、管理装置20では、データベース21の内容を更新する。例えば、図6に示すように、管理装置20の運用中においては通信機6を通じた交通指示機5の指示内容の切り替えスケジュールについての更新を常時受け付けている状態にある(ステップB11、ステップB12のNOルート)。そして、ある交通指示機5に付設されている通信機6から通信要求があった場合には、その通信機6における交通指示機5における指示内容の切り替えスケジュールについての更新情報を受け取る(ステップB13)。これにより、管理装置20では、受け取った更新情報の内容に従ってデータベース21を更新することができる(ステップB14)。
【0033】
なお、踏切遮断機としての交通指示機5の指示内容の切り替えスケジュールとしては、信号機のような一定周期的な切り替わりではなく、いうまでもなく該当踏切箇所の電車通過時刻に合わせたタイムテーブル構成としてデータベース21で管理することができる。
ところで、管理装置20においては、上述のごとく管理されている交通指示機5の指示内容の切り替えスケジュールについて、各車両2の車載機10から問い合わせがあった場合には、問い合わせに応じた交通指示機5についての指示内容の切り替えスケジュールについて当該車載機10に応答することができるようになっている。
【0034】
たとえば、図6に示すように、管理装置20の運用中においては常時各車両2の車載機10からの問い合わせを受け付けている状態にある(ステップB21、ステップB22のNOルート)。そして、ある車両2の車載機10から、当該車両2の位置および進行方向の先にある交通指示機5についての指示内容の切り替えスケジュールの問い合わせがあった場合には(ステップB22のYESルート)、データベース21を参照することにより(ステップB23)、該当交通指示機5についての指示内容の切り替えスケジュール(信号機の場合には基準時間および信号間隔)について応答する(ステップB24)。
【0035】
なお、後述するように、管理装置20において切り替えスケジュールを応答する対象となる交通指示機5は、当該車両2の直近の交通指示機5に限定されるものではない。即ち、管理装置20では、当該車両2が直近の交通指示機5を通過した次に辿る可能性のある経路上にそなえられた交通指示機5についても、指示内容の切り替えスケジュールを応答することができるようになっている。
【0036】
たとえば、図7に示すような、網目状レイアウトの道路配置8を有し、十字路となる各交差点に4つの信号機(交通指示機)が設置された地区において、位置Pを現在位置として図中上向きの進行方向で車両が走行しているときに、当該車両の車載機から管理装置20への問い合わせがあった場合を想定する。この場合には、管理装置20では、当該車両の直近の信号機9aのみならず、信号機9aを通過した次に辿る可能性のある信号機9bについても、指示内容の切り替えスケジュールを識別コードとともに応答することができる。
【0037】
なお、この場合においては、応答を行なう信号機9bの範囲としては、車両2に搭載されるモニタ画面に表示されるナビゲーション画面をなす地図表示範囲に含まれる信号機であって、現在位置から1回の右折/左折によって最初に遭遇する可能性のある信号機であることを条件に範囲を設定している。
ところで、図2に示す車両2に搭載された車載機10は、オーディオビジュアル(AV)機能とナビゲーション機能とを兼ね備えた装置として構成されるものであり、このために、例えば図8に示すような構成をそなえている。
【0038】
この図8に示す車載機10は、CPU(Central Processing Unit)11,RAM(Random Access Memory)12,ROM(Read Only Memory)13およびHDD(Hard Disk Drive)14をそなえるとともに、オペレータによる入力操作を受け付ける操作部15,ディスプレイ表示を行なう表示部16,スピーカ31での音再生についてパワーアンプ32を介して制御するDSP再生制御部17,図示しないGPS(Global Positioning System)衛星等からの信号についてGPSアンテナ33を介して受信するGPS受信部18をそなえている。尚、19aは例えばリモートコントローラ機能を持つ携帯電話34との通信を行なうための通信制御部である。
【0039】
さらに、車載機10にはTVアンテナ35からのテレビジョン放送信号を受信するTVチューナ19b,ラジオアンテナ36からのラジオ放送信号を受信するAM/FMチューナ19cのほか、CD/DVDデッキ19d,MDデッキ19eおよびカセットデッキ19fが適宜そなえられる。
また、CPU11は、上述のHDD14,表示部15,操作部16,通信制御部19a,チューナ19b,19cおよびデッキ19d〜19fについての制御を行なうシステム制御部11aと、DSP再生制御部17に対する制御を行なうオーディオ制御部11bと、をそなえるとともに、GPS受信器18および車速センサ37からの信号を取り込んで、車両走行のためのナビゲーション制御を行なうナビ制御部11cをそなえている。
【0040】
図1は上述のCPU11での処理を通じて実現する、本願発明の特徴的機能に着目して示す図である。車載機10は、交通指示機5による指示状態に従った交通予測を行なうことにより、車両2の走行支援を行なうものである。このために、図1に示すように、車載機10は、CPU11での処理を通じて、位置方向認識部41,通行/停止指示予測部42,表示制御部43,相対位置関係認識部44および待ち時間予測部45としての機能ををそなえている。
【0041】
ここで、位置方向認識部41および通行/停止指示予測部42は、主として車両2が進行状態にある場合において、前方の信号機等の交通指示機5に車両2が通過するときの交通指示機5の指示状態を予測するためのものである。この指示状態の予測によって、車両2が交通指示機5に接近したときに、交通指示機5手前で減速することなく交通指示機5を通過できるか否かの判断材料を、走行支援のために提供することができる。
【0042】
また、相対位置関係認識部44および待ち時間予測部45は、前方の交通指示機5の停止指示により、車両2を停止させている場合において、停止指示が解除されて交通指示機5を通過できるまでの時間を予測するものである。この交通指示機5を通過できるまでの時間の予測によって、苛立ち等の無用な運転者の不快感が生じることを抑制し、快適な走行を支援することができる。
【0043】
位置方向認識部41は、測位システムに基づいて車両2の位置とともに車両2の進行方向について認識するものである。本実施形態における測位システムは、例えばGPS衛星等からの信号をGPS受信器18で受信しこの受信信号から車両2の位置を測定するものである。
また、通行/停止指示予測部42は、位置方向認識部41において認識した車両2の進行方向の先にそなえられた交通指示機5の切り換えスケジュールおよび当該交通指示機5を車両2が通過する予測時刻に基づいて、車両2が当該交通指示機5を通過する際の当該交通指示機5の通行/停止指示状態を予測する。即ち、交通指示機5が信号機であれば、青,黄又は赤の灯火色を予測し、踏切遮断機であれば遮断機が上がっているか下がっているかを予測する。
【0044】
なお、車両2の通過時点での通行/停止指示状態を予測する対象となる交通指示機5には、後述するように、直近の交通指示機(即ち現在位置からの走行で最初に遭遇することとなる交通指示機)5のみならず、交通指示機5を通過した次に辿る可能性のある交通指示機5についても、所定の範囲内において含めることができる。
換言すれば、通行/停止指示予測部42は、車両2が最初に遭遇する交通指示機5とともに、交通指示機5を通過した次に辿る可能性のある経路上にそなえられた交通指示機5についての通行/停止指示状態についても、並行して予測することができる。又、通行/停止指示予測部42においては、所定時間周期ごとに通行/停止指示状態を予測することができる。即ち、刻々と変化する、車両2と交通指示機5との相対位置関係や交通指示機5の指示状態に追従すべく、例えば1秒周期等の所定周期で通行/停止指示状態を予測する。
【0045】
さらに、表示制御部43は、位置方向認識部41で認識された現在位置とともに、車両2の周辺の地図表示の表示制御を行なうものであり、特に、この表示制御部43の機能は主として前述のシステム制御部11aおよびナビ制御部11cで実現する。
また、上述の通行/停止指示予測部42は、交通指示機特定部42a,通過時刻予測部42b,スケジュール情報取得部42cおよび予測結果出力部42dとしての機能をそなえている。
【0046】
交通指示機特定部42aは、位置方向認識部41において認識した当該車両2の走行経路の延長上にそなえられた交通指示機5を特定する。この交通指示機特定部42aで特定した交通指示機5を対象として、車両2が該当交通指示機5を通過する時刻を続いて予測する。例えば前述の図7に示す現在位置Pにある車両2についてみれば、信号機9a,9bを、当該車両2の走行経路の延長上にそなえられた交通指示機5として特定する。
【0047】
また、通過時刻予測部42bは、交通指示機特定部42aで特定した交通指示機5を車両2が通過する時刻を予測する。即ち、交通指示機特定部42aで特定された交通指示機5を車両2が通過する際の通行/停止指示状態を予測するためのパラメータとして、対象交通指示機5を車両2が通過する予測時刻を演算により算出する。更に、スケジュール情報取得部42cは、管理装置20との通信を通じて、交通指示機特定部42aで特定した交通指示機5の指示内容が切り替わるスケジュール情報を取得する(図6のステップB21〜B24参照)。
【0048】
予測結果出力部42dは、通過時刻予測部42bで予測された時刻およびスケジュール情報取得部42cで取得した該スケジュール情報に基づいて、該交通指示機特定部で特定した交通指示機についての該通行/停止指示状態の予測を行ない、予測の結果を表示部16での表示等を行なうために出力する。
なお、上述の交通指示機特定部42aで特定した交通指示機5が複数ある場合には、個々の交通指示機5ごとに、上述の通過時刻予測部42bで通過時刻を予測し、スケジュール情報取得部42cで該当する交通指示機5でのスケジュール情報を取得し、予測結果出力部42dで予測結果を出力する。
【0049】
これにより、表示制御部43においては、表示部16において地図表示された範囲における、車両2の進行方向の先にそなえられた交通指示機5についての通行/停止指示状態の予測結果を、通行/停止指示予測部42をなす予測結果出力部42dから受け取って、予測結果について表示制御する。具体的には、例えば地図表示上の該当交通指示機5の位置に交通指示機5の指示態様に応じたアイコン表示により表示すべく表示部16を制御する。例えば、交通指示機5が信号機であれば予測された指示内容にかかる点灯状態を表す信号機デザインが表示される。
【0050】
また、上述の通過時刻予測部42bは、交通指示機特定部42aで特定した交通指示機5を車両2が通過する時刻を予測するため、距離算出部42ba,速度情報検出部42bbおよび予測時刻算出部42bcとしての機能を有している。距離算出部42baは、交通指示機特定部42aで特定した交通指示機5と、位置方向認識部41で認識した車両2の位置と、の距離を算出する。
【0051】
また、速度情報検出部42bbは、車速センサ37からの信号に基づいて、車両2の走行速度および加速度について検出する。更に、予測時刻算出部42bcは、距離算出部42baからの算出結果および速度情報検出部42bbでの検出結果に基づいて、交通指示機特定部42aで特定した交通指示機5を車両2が通過する予測時刻を算出する。
さらに、相対位置関係認識部44は、道路上の車両2の進行方向の先にそなえられた交通指示機5により進行が停止指示された場合において、測位システムに基づいて車両2の位置、および、車両に対して停止を指示している交通指示機5の位置の相対関係について認識する。具体的には、停止状態にある車両2の現在位置と、停止指示を行なっている交通指示機5との位置をGPS座標等で認識し、これらの位置関係から車両2と交通指示機5との距離を算出する。
【0052】
また、待ち時間予測部45は、上述の停止を指示している交通指示機5の切り換えスケジュールおよび相対位置関係認識部44で認識した相対位置関係をもとに、当該車両2が、停止を指示している交通指示機5を通過するまでの待ち時間を予測する。この待ち時間予測部45は、スケジュール情報取得部45a,台数推定部45bおよび関数演算部45cとしての機能をそなえている。
【0053】
スケジュール情報取得部45aは、相対位置関係認識部44で車両2との相対位置関係を認識した交通指示機5について、指示が切り替わるスケジュール情報を取得する。尚、このスケジュール情報取得部45aは、前述の通行/停止指示予測部42のスケジュール情報取得部42cとは異なり、車両2が停止指示を直接受けている直近の交通指示機5による指示が切り替わるスケジュール情報を管理装置20との通信を通じて取得する(図6のステップB21〜B24参照)。
【0054】
また、台数推定部45bは、相対位置関係認識部44で上述のごとく認識した相対位置関係をもとに、当該車両2の前方において、停止指示を行なっている交通指示機5により進行待ちとなっている車両台数を推定する。具体的には、相対位置関係認識部44でもとられた、車両2と対象交通指示機5との相対距離を、停車時の一台分の車間距離で除算することにより、得られる商の値を、車両2の前方において進行待ちとなっている車両台数と推定する。
【0055】
さらに、関数演算部45cは、台数推定部45bで推定された進行待ちの車両台数に応じた予測待ち時間について、関数演算により算出し出力する。この関数は、当該車両2の前方で進行待ちとなっている車両台数と、対象交通指示機5による通行指示の時間および停止指示の時間との関係をパラメータとして与えられた、当該車両2が対象交通指示機5を通過するまでの時間についての関数である。
【0056】
上述のごとく構成された車載機10が搭載された車両2においては、道路の走行中においては信号機等の交通指示機5により、その都度通行/停止の指示を受ける。このとき、位置方向認識部41および通行/停止指示予測部42により、例えば図9のフローチャートに従って、車両2が進行状態にある場合における、前方の信号機等の交通指示機5に車両2が通過するときの交通指示機5の指示状態を予測する。
【0057】
すなわち、内部カウンタをカウント値「0」に初期化させて、カウント値計時を開始する(ステップC1)。このカウント値をもとに、例えば10秒ごとの所定周期で、前方の交通指示機5を特定して、特定した交通信号機5を車両2が通過するときの指示内容について予測を行なっている。
まず、位置方向認識部41としての機能により車両2の現在位置および進行方向を認識する。即ち、車載機10におけるナビ制御部11c(図8参照)において、GPS受信器18で受信したGPS信号をもとに、車両2のGPS座標を位置情報として特定するとともに、進行方向を特定する。そして、システム制御部11aで、位置情報として特定した周辺の地図とともに表示部16で表示すべく表示部16を制御している。
【0058】
そして、この表示部16で表示される画面上の四隅のGPS座標を求め(ステップC2)、つぎに、車載機10においては、管理装置20へのアクセスを行なうことを通じ(ステップC3)、進行方向の先に存在する交通指示機5について特定するとともに、特定した交通指示機5の指示内容の切り替えスケジュールを取得する(ステップC4からステップC6〜ステップC9による通信スレッド)。
【0059】
換言すれば、交通指示機特定部42aとしての機能により、車両の現在位置とともに表示部16で表示されている地図範囲内において上述の指示状態の予測を行なう交通指示機5を特定し、スケジュール情報取得部42cとしての機能により、データベース21に記憶されている、指示状態の予測を行なう交通指示機5についての指示状態の切り替えスケジュールを取得する。
【0060】
ここで、交通指示機特定部42aにおいては、対象となる交通指示機5のGPS座標をHDD14の検索等により抽出する。この抽出ができない場合には、このGPS座標についても管理装置20に問い合わせて取得し、これにより、予測対象の交通指示機5の特定を行なう。
具体的には、地図表示画面の四隅のGPS座標を基地局3に送信し(ステップC6)、この画面表示の四隅の範囲内に位置する交通指示機5のGPS座標を管理装置20に問い合わせるとともに、併せてその交通指示機5における指示内容の切り替えスケジュールについても問い合わせを行ない、管理装置20からの応答受信の待機に入る(ステップC7のNOルート)。
【0061】
なお、管理装置20においては、データベース21を参照して、前述の画面表示の四隅の範囲内に位置する交通指示機5のGPS座標を取り出すとともに、指示内容の切り替えスケジュールについても取り出して、問い合わせを行なった車載機10に返信する(図6のステップB24参照)。
管理装置20からの応答信号に(ステップC7のYESルート)、当該車両2の進行方向の先に設置された、切り替え指示の予測対象となる交通指示機5についての切り替えスケジュールの情報が含まれている場合には(ステップC8のYESルート、ステップC9)、これらの情報について、RAM12にプールする(ステップC10)。
【0062】
また、管理装置20からの応答信号から、進行方向の先の画面内に、交通指示機5が存在しない場合等、切り替え対象となる交通指示機5が存在しないことが判明した場合には、終了を通知する(ステップC8のNOルート)。
また、切り替え指示の予測対象となる交通指示機5のGPS座標が、車載機10自身のHDD14等の記憶媒体に記憶されていて判明している場合には、ステップC6では四隅のGPS座標を送信するとともに、対象となる交通指示機5のGPS座標についても管理装置20へ送信する。
【0063】
これにより、ステップC9においては、交通指示機特定部42aおよびスケジュール情報取得部42cとしての機能により、データベース21から取り出された信号機情報として、識別データ(ID)を,基準時間および信号間隔に関する情報を管理装置20から受け取り、ステップC10で、これをRAM12にプールする。
なお、上述の管理装置20への問い合わせは、管轄する地域ごとに管理装置20が複数そなえられているような場合には、管理装置20の設置数分行なうこととすることもできる(ステップC11)。
【0064】
つぎに、管理装置20からスケジュール情報その他位置情報を受け取った、切り替え指示の予測対象となる交通指示機5について、車両2通過時の指示内容、即ち灯火色を予測する。尚、上述の交通指示機特定部42aで特定した交通指示機5が複数ある場合には、個々の交通指示機5ごとに指示内容の予測を行なう(ステップC12)。
まず、通過時刻予測部42bにおいて、車両2が対象交通指示機5を通過する際の時刻を予測するために、車両2の現在の車速vおよび加速度aを求める。具体的には、車速センサ37(図8参照)からの検出情報をもとに、速度情報検出部42bbにおいて、現在の速度vを取得するとともに(ステップC13)、単位時間Δtにおける速度変位を、加速度aとして導出する(ステップC14)。
【0065】
ついで、距離算出部42baにおいて、指示内容の予測対象の交通指示機5ごとに、車両2の現在位置との相対距離xを、それぞれのGPS座標値から求める(ステップC15)。そして、これらの速度情報検出部42bbで求められた速度vおよび加速度aとともに、距離算出部42baで算出した相対距離xを用いることにより、予測時刻算出部42bcにおいて車両2が現在の走行状態で進行した場合の、該当交通指示機5の通過時における時刻t3を予測する(ステップC16)。
【0066】
具体的には、時刻t3については式:t3=(x/v)+t1に従って求めるが、加速度aを加味して、加速度aの符号が正、即ち加速状態にあるときには、(x/v)+t1よりも短めに、加速度aの符号が負、即ち減速状態にあるときには、(x/v)+t1よりも長めに、それぞれ設定する。更に、予測対象の交通指示機5までの経路上に他の交通指示機5があり、その交通指示機5で停まる見込みである場合には、(x/v)+t1よりも長めに設定する。
【0067】
そして、予測結果出力部42dにおいては、このように算出された予測時刻と、スケジュール情報取得部42cで取得した、該当交通指示機5の指示内容の切り替えスケジュールと、を対比して、予測時刻での指示内容、即ち灯火色を予測する(ステップC17)。
具体的には、スケジュール情報取得部42cで取得した、該当交通指示機5のスケジュール情報が、基準時間t2として「20時35分00秒」であり、信号間隔情報が、「青60秒、黄10秒、赤50秒」であり、現在時刻t1が「20時36分30秒」で、更に、通過時刻予測部42bで予測された通過予測時刻t3が「20時40分30秒」である場合を想定する。
【0068】
この場合においては、現在時刻t1では基準時間t2から90秒後である。予測灯火色を求める計算の簡単のため、現在時刻から30秒後の時刻t1′(=t1+30秒)から通過予測時刻t3までの時間t4(t3−t1′)を求める。この場合には300秒である。そして、信号間隔の合計時間t5は120秒(60+10+50)である。
ついで、灯火色の予測のために、t4÷t5の余りt6を求める。このt6の値に応じて、0≦t6≦60であれば灯火色は「青」であると予測され、60<t6≦70であれば灯火色は「黄」であると予測され、70<t6≦120であれば灯火色は「赤」であると予測される。この場合においては、t6は、300÷120の余りであるから、60である。即ち、車両2が信号機としての交通指示機5を通過するときの灯火色は「青」であると予測される。
【0069】
このような信号機による灯火色の予測が、予測対象となる全ての信号機について行われると(ステップC18、ステップC19のYESルート)、予測された結果の灯火色情報から、各信号機についての通過可否の予測を行なう。いうまでもなく、予測結果が「青」であれば、その信号機は通過可であり、「黄」,「赤」であればその信号機は通過否であると予測する(ステップC20)。
【0070】
そして、表示制御部43においては、例えば地図表示上の該当交通指示機5の位置に予測結果を反映した点灯状態を表すアイコン表示とともに、傍らに通過可又は否を示す表示(例えば○表示やX表示)を行なうべく表示部16を制御する(ステップC21)。
このような表示を行なっても、内部カウンタの値がカウント開始から10秒を経過していない場合には、再度対象信号機についての通過時の灯火色予測を行なって(ステップC22のNOルートからステップC13〜ステップC20)、通過可否を予測する(ステップC21)。又、カウント開始から10秒を経過している場合には、カウント値をリセットし、交通指示機特定部42aによる対象交通指示機5の特定に戻る(ステップC22のYESルートからステップC1)。
【0071】
なお、上述のごとき、交通指示機5の指示内容の予測処理においては、ステップC22のNOルートからステップC12〜ステップC21のループは、例えば2〜4秒程度のサイクルで行なうことができる。
なお、青灯となることを予測する場合においては、上述のステップC21においては、上述の信号機アイコンの傍らに、当該青灯の対象となる信号機の方向を指すようなマーク、例えば図10(a)に示すような三角形マークを表示することができる。この図10(a)の場合においては三角形マークは上向きなので、自車位置から例えば北向きに進む信号が青であることが確認できる。
【0072】
また、赤灯となることを予測する場合においては、例えば図10(b)に示すように、信号機アイコンの傍らに「X」マークを表示し、更に赤灯の点滅となることを予測する場合には、信号機アイコンおよび「X」マークについても点滅するようにしてもよい。更には、このように赤灯となることを予測する場合においては、上述のごとき信号機アイコンによる強調表示のほかに、音のチャイムをならすことで、運転者に注意の喚起を与えるようにしてもよい。
【0073】
さらに、黄灯となることとなることを予測する場合においては、例えば図10(c)に示すように、上述の信号機アイコンの傍らに、「!」マークを表示し、更に黄灯の点滅となることを予測する場合には、信号機アイコンおよび「!」マークについても点滅するようにしてもよい。更には、このように黄灯となることを予測する場合においては、上述のごとき信号機アイコンによる強調表示のほかに、上述の赤灯を予測する場合よりも音量の小さい音のチャイムをならすことで、運転者に注意の喚起を与えるようにしてもよい。
【0074】
これにより、運転者に注意の喚起を与える必要度に応じて音量を可変することで、車両走行の支援のための情報を運転者に効率的に提供することができるようになる。
また、上述のごとき信号機アイコンの表示に併せ、現在の点灯状態の残り時間についてグラフ表示、例えば図10(d)に示すように棒グラフ表示を行なうこととしてもよい。上述したように、ステップC22のNOルートからステップC12〜ステップC21のループは、例えば2〜4秒程度のサイクルで行なうことができるので、この棒グラフ表示についても、2〜4秒程度のサイクルで表示内容を変更できるので、残り時間が減っていくことを棒グラフ表示から確認することが可能となる。
【0075】
さらに、上述の通行/停止指示予測部42においては、前述の図7に示す信号機9aを通過した次に遭遇する信号機9bの状態を予測するにあたっては、最初に遭遇することとなる信号機9aの状態を加味して予測することもできる。
具体的には、通過時刻予測部42bにおいて、当該通過時刻予測部42bでの信号機9aについての予測結果とスケジュール情報取得部42cにて取得されるスケジュール情報との対比に基づいて、最初に遭遇することとなる信号機9aの、赤信号による待ち時間を含めた通過予想時刻を求める。即ち、通過予想時刻は、通過時刻予測部42bで予測される信号機9aの通過時刻と、当該信号機9aでの待ち時間と、の和により求められる。尚、当該信号機9aでの待ち時間は、通過時刻予測部42bからの予測時刻とスケジュール情報取得部42cからのスケジュール情報とを対比することにより算出する。そして、通過時刻予測部42bにおいて、距離算出部42baにおいて求められているそれぞれの信号機9a,9bまでの距離をもとに、最初の信号機9aを起点とした次の信号機9bまでの走行時間を推定する。具体的には、最初の信号機9aから次の信号機9bまでの距離を算出するとともに、算出した距離を平均速度で除算し、除算結果を走行時間の推定結果とする。尚、上述の推定に用いられる平均速度としては、現在から過去の一定時間にさかのぼった走行履歴における平均の速度を求めておき、これを用いることができる。その他、現在の走行経路の道路種別(属性)についてナビゲーションシステムから取得し、その道路属性から、平均速度として計算するための値をマッピング等により一律に割り当てることとしてもよい。例えば、道路属性が1車線の一般道であれば平均速度を40km/hとし、2車線の一般道であれば50km/hとし、1車線の自動車専用道であれば60km/hとし、2車線の自動車専用道であれば70km/hとして割り当てることができる。そして、通過時刻予測部42bにおいて、このように計算された最初の信号機9aの通過予想時刻と、信号機9aおよび信号機9b間の推定走行時間と、を加算することにより、当該車両が走行している現在位置Pから、最初の信号機9aの次の信号機9bにおけるまでの通過予測時刻を算出する。予測結果出力部42dでは、このように通過時刻予測部42bで算出された信号機9bの通過予測時刻と、スケジュール情報取得部42cからのスケジュール情報とを対比することにより、通過予測時刻での指示内容、即ち灯火色を予測するのである。
【0076】
ところで、上述のごとき走行中における前方の交通指示機5の指示内容の予測に続いて、車両2が前方の交通指示機5により停止指示を受けた場合には、相対位置関係認識部44および待ち時間予測部45としての機能により、図11,図12のフローチャートに示すように、停止指示が解除されて交通指示機5を通過できるまでの時間を予測する。
すなわち、車両2が走行中において、次に遭遇する(直近の)交通指示機5を、現在の走行状態のまま通過できるかを判定する。交通指示機5が信号機の場合には次に遭遇する信号機がある交差点を現在の走行状態のままで通過することが可能か否かを、信号機の灯火状態の予測をもとに判定する(図11のステップD1、図9のステップC20参照)。
【0077】
そして、次に遭遇する信号機が有る交差点を通過することが可であると判定された場合には、以下のような信号機通過までの時間を予測する処理には移行せずに終了する。しかし、交差点を通過することが不可である場合には(ステップD2)、その信号機の停止指示を受けて、車両は走行状態からスピードダウンして停止することになる(ステップD3のYESルート)。
【0078】
このとき、更に、車載機10においては、管理装置20から取得している信号機の指示内容の切り替えスケジュールに基づいて、現在の信号機の状態が停止指示の状態にあるか否かを判定している(ステップD4)。スピードダウンして停止したとしても、そのときに信号が青灯であれば、信号機通過までの時間計算は行なわない(ステップD5のNOルート)。しかし、現在の信号機の状態が停止指示の状態にある場合には、その信号機を通過するまでの時間を計算するルーチンに移行する(ステップD5のYESルート)。
【0079】
この信号機を通過するまでの時間を計算するルーチンにおいては、まず、相対位置関係認識部44としての機能により、GPS受信器18にアクセスし、このGPS受信器18からのGPS受信信号をもとにして、現在の車両2の位置をGPS座標として取得する(ステップD6)。そして、前述の信号機の灯火状態の予測処理の際に、交通指示機特定部42aにより取得していた、次に遭遇する信号機のGPS座標についてもRAM12を参照することにより取り出す(ステップD7)。
【0080】
さらに、この相対位置関係認識部44としての機能により、上述のごとく取り出した車両2の現在位置、および次に遭遇する信号機(対象信号機)の位置を表すGPS座標を用いることにより、自車両2から対象信号機までの距離Xを求める(ステップD8)。この距離Xを求めるにあたっては、自車両2から対象信号機までの道路軌跡に応じて適切な値が求められる手法を採用することができる。
【0081】
具体的には、自車両2から対象信号機までの道路軌跡が直線である場合には、上述のごとく取得したGPS座標を用いることにより演算により算出する。又、自車両2から対象信号機までの道路軌跡が曲線である場合には、前述の対象信号機のGPS座標を管理装置20におけるデータベース21の内容から取得する際に、併せて対象信号機の向いている方角についても取得して、自車両2の向いている方角と、対象信号機の向いている方角とから、道路軌跡を、双方の位置を通過する同心円の一部をなす円弧Fとみて、この円弧の長さを求めることにより距離Xを算出する。
【0082】
つぎに、待ち時間予測部45としての機能により、この相対位置関係認識部44での機能により算出された自車両2から対象信号機までの距離Xと、対象信号機の指示内容の切り替えスケジュールと、を用いて、自車両2が対象信号機を通過するまでの時間を予測する(D9,D10)。尚、対象信号機の指示内容の切り替えスケジュールとしては、待ち時間予測部45におけるスケジュール情報取得部45aで取得するようになっているが、通行/停止指示予測部42におけるスケジュール情報取得部42cで取得したものを流用することとしてもよい。
【0083】
まず、台数推定部45bとしての機能により、上述のごとく算出された距離Xから、自車両2の前方で対象信号機による停止指示で停止している車両の台数を推定する。例えば、クルマの全長の平均値を4500mmとし、車間距離の平均値を1000mmとして、式(1)から導出される値を台数として推定する(ステップD9)。
台数=X[mm]÷(クルマの全長の平均値+車間距離の平均値)
=X[mm]÷(4500+1000) …(1)
また、上述の式(1)での「クルマの全長の平均値」としては、上述の4500mmという値を用いるほかに、演算により求めることもできる。例えば、対向車線で出会った全ての自動車の全長を、相対速度の検出と物体感知センサの検出情報とを用いることにより計測するとともに、得られる計測データを蓄積して平均値を算出し結果の値を用いることとしてもよい。
【0084】
また、現在市場に出回っている全自動車の全長を、販売台数で重み付けして平均をとり、得られた値を、式(1)の演算の際の「クルマの全長の平均値」として、管理装置20に情報として置いておくこととしてもよい。具体的には、市場にN種類のクルマが出回っていて、それぞれのクルマがM1〜MNの台数が売れており、全長データをそれぞれL1〜LNとすると、式(2)から求められる値を、「クルマの全長の平均値」とすることができる。即ち、(全種類のクルマについての「全長×市場に出回っている台数」の和)÷(市場に出回っているクルマの合計台数)を、「クルマの全長の平均値」とするのである。
【0085】
クルマの全長の平均値=(Σ(Li×Mi))/(ΣMi) …(2)
さらに、式(1)での「車間距離の平均値」としては、上述の1000mmという値を用いるほかに、演算により求めることができる。例えば、自車両2が停車するごとに、前のクルマと自車両2との車間距離を計算し、計算された車間距離のデータを蓄積して平均をとり、得られた値を、式(1)の演算の際の「車間距離の平均値」として用いることとしてもよい。
【0086】
つぎに、関数演算部45cとしての機能により、図12のステップD10に示すような、式(1)から得られる台数を変数として、対象信号機の通過時間についての(ステップ状に値が変化するような)関数を定義しておき、ステップD9で求められた台数から、現在の時間から、対象信号機を通過するまでの予測時間を導出する(ステップD10)。
なお、この関数演算部45cで定義される関数としては、現在時間から対象信号機が青となるまでの待ち時間によりグラフの切片が上下し、自車両2よりも前方の待ち台数が増えるにつれ交差点通過時のスピードが増加するので、y軸(待ち時間)の上昇幅は小さくなるという特性を有する(ステップD10のB参照)。
【0087】
ただし、対象信号機の青信号の時間に起因して、自車両2よりも前方の待ち台数が所定の台数(図12の場合には6台)を超える場合には、交差点通過前に再度赤信号になる場合もある。このように交差点通過前に再度赤信号になる場合、待ち時間は、再度の赤信号灯火の間だけ急激に増加することにもなる(ステップD10のA参照)。
関数演算部45cで導出された、対象信号機を通過するまでの予測時間については、表示制御部43による表示部16の制御を通じて、グラフ表示、例えば図13に示すような、対象信号機を表すアイコンの傍らにおいて円グラフ表示を行なう。この場合において、関数演算部45cで導出された時間を100パーセントの比率として円グラフ表示を行ないつつ(ステップD11のNOルートからステップD12)、対象信号機の交差点を通過するまで、時間経過ごとに円グラフのメモリを0パーセントに近づけるような表示制御を行なう(ステップD13、ステップD14のNOルート、ステップD15のNOルート)。尚、関数演算部45cでの推測が正確であれば、対象信号機の交差点を通過した瞬間にグラフの値が0となる。
【0088】
ただし、自車両2が次の青信号で交差点を通過することができずに、再び停車した場合には、再度信号機通過までの時間を計算するルーチンを開始して、再度交差点通過までの時間の予測を行なう(ステップD15のYESルートからステップD6〜ステップD10)。尚、予測された通過時間をグラフ表示するにあたり、対象信号機において、すでに一回以上停車している後である場合には、表示制御部43では、一番最初に導出した待ち時間をt1、今回導出した待ち時間をt2とすると、(t2/t1)×100パーセントの値を算出して、円グラフを書き直す(ステップD11のYESルートからステップD16)。
【0089】
このように、本発明の一実施形態によれば、位置方向認識部41および通行/停止指示予測部42により、走行中の車両2が前方の交通指示機5を通過する時点での指示状態を予測できるので、運転の効率性や快適性を向上させることができる利点がある。
また、相対位置関係認識部44および待ち時間予測部45により、交通指示機5により停止の管制を受けている状態において当該交通指示機5を実際に通過できるまでの時間を、前方の待ち台数のごとき道路交通状況に応じて予測できるので、運転の効率性や移動の快適性を向上させることができる利点がある。
【0090】
〔B〕その他
上述した実施形態にかかわらず、本発明の趣旨を逸脱しない範囲において種々変形して実施することができる。
例えば、上述の実施形態においては、走行中の車両2が前方の交通指示機5を通過する時点での指示状態の予測と、交通指示機5により停止の管制を受けている状態において当該交通指示機5を実際に通過できるまでの時間の予測を、連動して行なっているが、本発明によれば、それぞれ個別に行なうこととしてもよい。この場合において、交通指示機5により停止の管制を受けている状態において当該交通指示機5を実際に通過できるまでの時間の予測を開始するにあたっては、例えば、対象信号機を特定するとともに、特定した対象信号機の現在時刻での指示内容が停止指示となったことをトリガとしたり、停止中の車内の乗員が特に通過までの時間を知りたい場合に、その旨の入力操作を操作部15(図8参照)を介して行なうことをトリガとしたりすることができる。
【0091】
また、上述した実施形態の開示により、本発明の装置を製造することは可能である。
【図面の簡単な説明】
【0092】
【図1】本発明の一実施形態における車両走行支援装置を示す機能ブロック図である。
【図2】本実施形態にかかる車両走行支援装置が適用された車両走行支援システムを示すブロック図である。
【図3】本実施形態における管理装置のデータベースを示す図である。
【図4】信号機の指示内容の切り替わりの一例を説明するための図である。
【図5】本実施形態における交通指示機としての信号機の指示内容の切り替えスケジュールの更新態様について説明するためのフローチャートである。
【図6】本実施形態における管理装置における処理を説明するためのフローチャートである。
【図7】自車両に対する指示内容の予測を行なう対象の信号機の範囲について説明するための図である。
【図8】本実施形態における車両走行支援装置としての車載機を示すハードウェアブロック図である。
【図9】本実施形態における車載機での動作を説明するためのフローチャートである。
【図10】(a)〜(d)はいずれも本実施形態における車載機の表示部での表示態様を示す図である。
【図11】本実施形態における車載機での動作を説明するためのフローチャートである。
【図12】本実施形態における車載機での動作を説明するためのフローチャートである。
【図13】本実施形態における車載機の表示部での表示態様を示す図である。
【符号の説明】
【0093】
1 車両走行支援システム
2 車両
3 基地局
4 公衆網
5 交通指示機(信号機)
6 通信機
7 放送局
8 道路配置
9a,9b 信号機
10 車載機(車両走行支援装置)
11 CPU
11a システム制御部
11b オーディオ制御部
11c ナビ制御部
12 RAM
13 ROM
14 HDD
15 操作部
16 表示部
17 DSP再生制御部
18 GPS受信部
19a 通信制御部
19b TVチューナ
19c AM/FMチューナ
19d CD/DVDデッキ
19e MDデッキ
19f カセットデッキ
20 管理装置
21 データベース
31 スピーカ
32 パワーアンプ
33 GPSアンテナ
34 携帯電話
35 TVアンテナ
36 ラジオアンテナ
37 車速センサ
41 位置方向認識部
42 通行/停止指示予測部
42a 交通指示機特定部
42b 通過時刻予測部
42ba 距離算出部
42bb 速度情報検出部
42bc 予測時刻算出部
42c スケジュール情報取得部
42d 予測結果出力部
43 表示制御部
44 相対位置関係認識部
45 待ち時間予測部
45a スケジュール情報取得部
45b 台数推定部
45c 関数演算部
【特許請求の範囲】
【請求項1】
道路上に設置されて車両の通行/停止を指示する交通指示機による指示状態に従った交通予測を行なうことにより、該車両の走行支援を行なう車両走行支援装置であって、
車両の位置とともに該車両の進行方向について認識する位置方向認識部と、
該位置方向認識部において認識した該車両の進行方向の先にそなえられた交通指示機の切り替えスケジュールおよび当該交通指示機を該車両が通過する予測時刻に基づいて、該車両が当該交通指示機を通過する際の当該交通指示機の通行/停止指示状態を予測する通行/停止指示予測部と、をそなえ、
該通行/停止指示予測部は、
該車両の通行/停止を指示する交通指示機であって、該位置方向認識部において認識した走行経路の延長上にそなえられた交通指示機を特定する交通指示機特定部と、
該交通指示機特定部で特定した交通指示機を該車両が通過する時刻を予測する通過時刻予測部と、
該交通指示機特定部で特定した交通指示機の指示が切り替わるスケジュール情報を取得するスケジュール情報取得部と、
該通過時刻予測部で予測された時刻および該スケジュール情報取得部で取得した該スケジュール情報に基づいて、該交通指示機特定部で特定した交通指示機についての該通行/停止指示状態の予測を行ない、該予測の結果を出力する予測結果出力部と、
をそなえたことを特徴とする、車両走行支援装置。
【請求項2】
該通過時刻予測部は、
該交通指示機特定部で特定した交通指示機と、該位置方向認識部で認識した該車両の位置と、の距離を算出する距離算出部と、
該車両の走行速度および加速度について検出する速度情報検出部と、
該距離算出部からの算出結果および該速度情報検出部での検出結果に基づいて、該交通指示機特定部で特定した交通指示機を該車両が通過する予測時刻を算出する予測時刻算出部と、をそなえたことを特徴とする、請求項1記載の車両走行支援装置。
【請求項3】
該位置方向認識部で認識された現在位置とともに該車両の周辺の地図表示の表示制御を行なう表示制御部をそなえ、
該表示制御部は、該地図表示された範囲における、該車両の進行方向の先にそなえられた該交通指示機についての通行/停止指示状態の予測結果を該通行/停止指示予測部から受け取って、該予測結果について表示制御することを特徴とする、請求項1または2記載の車両走行支援装置。
【請求項4】
該通行/停止指示予測部は、該車両が最初に遭遇する交通指示機とともに、該交通指示機を通過した次に辿る可能性のある経路上にそなえられた交通指示機についての通行/停止指示状態についても、並行して予測することを特徴とする、請求項1〜3のいずれか1項記載の車両走行支援装置。
【請求項5】
該通行/停止指示予測部は、次に遭遇する信号を予測するにあたり、最初に遭遇する信号の状態を加味して予測することを特徴とする、請求項4記載の車両走行支援装置。
【請求項6】
道路上に設置されて車両の通行/停止を指示する交通指示機による指示状態に従った交通予測を行なうことにより、該車両の走行支援を行なう車両走行支援装置であって、
該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示された場合において、該車両の位置、および、該車両に対して停止を指示している交通指示機の位置の相対関係について認識する相対位置関係認識部と、
該停止を指示している交通指示機の切り替えスケジュールおよび該相対位置関係認識部で認識した該相対位置関係をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測する待ち時間予測部と、をそなえたことを特徴とする、車両走行支援装置。
【請求項7】
該待ち時間予測部は、
該相対位置関係認識部で該車両との相対位置関係を認識した交通指示機について、指示が切り替わるスケジュール情報を取得するスケジュール情報取得部と、
該相対位置関係認識部で認識された該相対位置関係をもとに、当該車両の前方において、該交通指示機により進行待ちとなっている車両台数を推定する台数推定部と、
該台数推定部で推定された該車両台数に応じた予測待ち時間を出力する演算部と、をそなえたことを特徴とする、請求項6記載の車両走行支援装置。
【請求項8】
車両の通行/停止を指示する交通指示機であって、該車両の進行方向の先にそなえられた該交通指示機を該車両が通過する時刻を予測し、
該交通指示機の通行/停止指示が切り替わるタイミング情報を取得し、
該予測された時刻および該取得したタイミング情報に基づいて、該交通指示機を該車両が通過する際の、当該交通指示機の通行/停止指示状態を予測することを特徴とする、交通指示機の通行/停止指示状態予測方法。
【請求項9】
車両の通行/停止を指示する交通指示機であって、該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示されたことを判断し、
該交通指示機により進行が停止指示されたことを判断した場合において、測位システムに基づいて該車両および該停止を指示している交通指示機の位置について認識し、
該位置を認識した、該停止を指示している交通指示機と、該車両の位置と、の距離を算出し、
該算出した距離をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測することを特徴とする、待ち時間予測方法。
【請求項10】
車両の通行/停止を指示する道路上に設置された交通指示機の指示内容の切り替えスケジュールを該交通指示機ごとに管理する管理装置と、
車両に搭載されて、該交通指示機の指示内容の切り替えスケジュールを該管理装置から取得し該車両の走行支援を行なう車載機と、をそなえ、
該車載機が、
測位システムに基づいて該車両の位置とともに該車両の進行方向について認識する位置方向認識部と、
該位置方向認識部において認識した該車両の進行方向の先にそなえられた交通指示機の切り替えスケジュールを該管理装置から取得して、該取得した切り替えスケジュールおよび当該交通指示機を該車両が通過する予測時刻に基づいて、該車両が当該交通指示機を通過する際の当該交通指示機の通行/停止指示状態を予測する通行/停止指示予測部と、をそなえたことを特徴とする車両走行支援システム。
【請求項11】
車両の通行/停止を指示する道路上に設置された交通指示機の指示内容の切り替えスケジュールを該交通指示機ごとに管理する管理装置と、
車両に搭載されて、該交通指示機の指示内容の切り替えスケジュールを該管理装置から取得し該車両の走行支援を行なう車載機と、をそなえ、
該車載機が、
該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示された場合において、測位システムに基づいて該車両および該停止を指示している交通指示機の相対位置関係について認識する相対位置関係認識部と、
該停止を指示している交通指示機の切り替えスケジュールを該管理装置から取得して、該取得した切り替えスケジュールおよび該相対位置関係認識部で認識した該相対位置関係をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測する待ち時間予測部と、をそなえたことを特徴とする、車両走行支援システム。
【請求項1】
道路上に設置されて車両の通行/停止を指示する交通指示機による指示状態に従った交通予測を行なうことにより、該車両の走行支援を行なう車両走行支援装置であって、
車両の位置とともに該車両の進行方向について認識する位置方向認識部と、
該位置方向認識部において認識した該車両の進行方向の先にそなえられた交通指示機の切り替えスケジュールおよび当該交通指示機を該車両が通過する予測時刻に基づいて、該車両が当該交通指示機を通過する際の当該交通指示機の通行/停止指示状態を予測する通行/停止指示予測部と、をそなえ、
該通行/停止指示予測部は、
該車両の通行/停止を指示する交通指示機であって、該位置方向認識部において認識した走行経路の延長上にそなえられた交通指示機を特定する交通指示機特定部と、
該交通指示機特定部で特定した交通指示機を該車両が通過する時刻を予測する通過時刻予測部と、
該交通指示機特定部で特定した交通指示機の指示が切り替わるスケジュール情報を取得するスケジュール情報取得部と、
該通過時刻予測部で予測された時刻および該スケジュール情報取得部で取得した該スケジュール情報に基づいて、該交通指示機特定部で特定した交通指示機についての該通行/停止指示状態の予測を行ない、該予測の結果を出力する予測結果出力部と、
をそなえたことを特徴とする、車両走行支援装置。
【請求項2】
該通過時刻予測部は、
該交通指示機特定部で特定した交通指示機と、該位置方向認識部で認識した該車両の位置と、の距離を算出する距離算出部と、
該車両の走行速度および加速度について検出する速度情報検出部と、
該距離算出部からの算出結果および該速度情報検出部での検出結果に基づいて、該交通指示機特定部で特定した交通指示機を該車両が通過する予測時刻を算出する予測時刻算出部と、をそなえたことを特徴とする、請求項1記載の車両走行支援装置。
【請求項3】
該位置方向認識部で認識された現在位置とともに該車両の周辺の地図表示の表示制御を行なう表示制御部をそなえ、
該表示制御部は、該地図表示された範囲における、該車両の進行方向の先にそなえられた該交通指示機についての通行/停止指示状態の予測結果を該通行/停止指示予測部から受け取って、該予測結果について表示制御することを特徴とする、請求項1または2記載の車両走行支援装置。
【請求項4】
該通行/停止指示予測部は、該車両が最初に遭遇する交通指示機とともに、該交通指示機を通過した次に辿る可能性のある経路上にそなえられた交通指示機についての通行/停止指示状態についても、並行して予測することを特徴とする、請求項1〜3のいずれか1項記載の車両走行支援装置。
【請求項5】
該通行/停止指示予測部は、次に遭遇する信号を予測するにあたり、最初に遭遇する信号の状態を加味して予測することを特徴とする、請求項4記載の車両走行支援装置。
【請求項6】
道路上に設置されて車両の通行/停止を指示する交通指示機による指示状態に従った交通予測を行なうことにより、該車両の走行支援を行なう車両走行支援装置であって、
該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示された場合において、該車両の位置、および、該車両に対して停止を指示している交通指示機の位置の相対関係について認識する相対位置関係認識部と、
該停止を指示している交通指示機の切り替えスケジュールおよび該相対位置関係認識部で認識した該相対位置関係をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測する待ち時間予測部と、をそなえたことを特徴とする、車両走行支援装置。
【請求項7】
該待ち時間予測部は、
該相対位置関係認識部で該車両との相対位置関係を認識した交通指示機について、指示が切り替わるスケジュール情報を取得するスケジュール情報取得部と、
該相対位置関係認識部で認識された該相対位置関係をもとに、当該車両の前方において、該交通指示機により進行待ちとなっている車両台数を推定する台数推定部と、
該台数推定部で推定された該車両台数に応じた予測待ち時間を出力する演算部と、をそなえたことを特徴とする、請求項6記載の車両走行支援装置。
【請求項8】
車両の通行/停止を指示する交通指示機であって、該車両の進行方向の先にそなえられた該交通指示機を該車両が通過する時刻を予測し、
該交通指示機の通行/停止指示が切り替わるタイミング情報を取得し、
該予測された時刻および該取得したタイミング情報に基づいて、該交通指示機を該車両が通過する際の、当該交通指示機の通行/停止指示状態を予測することを特徴とする、交通指示機の通行/停止指示状態予測方法。
【請求項9】
車両の通行/停止を指示する交通指示機であって、該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示されたことを判断し、
該交通指示機により進行が停止指示されたことを判断した場合において、測位システムに基づいて該車両および該停止を指示している交通指示機の位置について認識し、
該位置を認識した、該停止を指示している交通指示機と、該車両の位置と、の距離を算出し、
該算出した距離をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測することを特徴とする、待ち時間予測方法。
【請求項10】
車両の通行/停止を指示する道路上に設置された交通指示機の指示内容の切り替えスケジュールを該交通指示機ごとに管理する管理装置と、
車両に搭載されて、該交通指示機の指示内容の切り替えスケジュールを該管理装置から取得し該車両の走行支援を行なう車載機と、をそなえ、
該車載機が、
測位システムに基づいて該車両の位置とともに該車両の進行方向について認識する位置方向認識部と、
該位置方向認識部において認識した該車両の進行方向の先にそなえられた交通指示機の切り替えスケジュールを該管理装置から取得して、該取得した切り替えスケジュールおよび当該交通指示機を該車両が通過する予測時刻に基づいて、該車両が当該交通指示機を通過する際の当該交通指示機の通行/停止指示状態を予測する通行/停止指示予測部と、をそなえたことを特徴とする車両走行支援システム。
【請求項11】
車両の通行/停止を指示する道路上に設置された交通指示機の指示内容の切り替えスケジュールを該交通指示機ごとに管理する管理装置と、
車両に搭載されて、該交通指示機の指示内容の切り替えスケジュールを該管理装置から取得し該車両の走行支援を行なう車載機と、をそなえ、
該車載機が、
該車両の進行方向の先にそなえられた該交通指示機により進行が停止指示された場合において、測位システムに基づいて該車両および該停止を指示している交通指示機の相対位置関係について認識する相対位置関係認識部と、
該停止を指示している交通指示機の切り替えスケジュールを該管理装置から取得して、該取得した切り替えスケジュールおよび該相対位置関係認識部で認識した該相対位置関係をもとに、該停止を指示している交通指示機を当該車両が通過するまでの待ち時間を予測する待ち時間予測部と、をそなえたことを特徴とする、車両走行支援システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2007−170864(P2007−170864A)
【公開日】平成19年7月5日(2007.7.5)
【国際特許分類】
【出願番号】特願2005−365442(P2005−365442)
【出願日】平成17年12月19日(2005.12.19)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
【公開日】平成19年7月5日(2007.7.5)
【国際特許分類】
【出願日】平成17年12月19日(2005.12.19)
【出願人】(000237592)富士通テン株式会社 (3,383)
【Fターム(参考)】
[ Back to top ]