
車両走行支援装置
【課題】目視困難な領域の複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握し、自車の安全な走行情報を提示できる車両走行支援装置の提供。
【解決手段】本発明の車両走行支援装置は、車両走行支援情報を外部から受信する通信部211と、車両走行支援情報から他車両の走行位置を解析する車両走行位置解析部213と、車両走行支援情報から他車両の報知状況を解析する車両報知情報解析部214と、他車両の走行位置および他車両の報知情報を用いて他車両の移動を予測する移動予測部216と、移動予測部216で予測した他車両の移動予測情報を用いて自車両の走行情報を生成する走行情報生成部217とを備えたことにより、自車の安全な追い越し、車線変更、右左折などの走行支援が可能となる。
【解決手段】本発明の車両走行支援装置は、車両走行支援情報を外部から受信する通信部211と、車両走行支援情報から他車両の走行位置を解析する車両走行位置解析部213と、車両走行支援情報から他車両の報知状況を解析する車両報知情報解析部214と、他車両の走行位置および他車両の報知情報を用いて他車両の移動を予測する移動予測部216と、移動予測部216で予測した他車両の移動予測情報を用いて自車両の走行情報を生成する走行情報生成部217とを備えたことにより、自車の安全な追い越し、車線変更、右左折などの走行支援が可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、周囲に存在する他車両などから送信される映像、音声、文字、データなどの情報に基づいて、自車から目視できない領域に存在する他車両の走行位置、道路形状、信号、道路標識や歩行者、自転車などの状況を把握することができる車両走行支援装置に関するものである。
【背景技術】
【0002】
大型車などの後方を走行している車両の運転者は、先行する大型車に視界が遮られて自車線および隣接車線の前方の様子を把握できないことが多々ある。
【0003】
この問題を解決するための従来の車両走行支援装置としては、先行する車両に搭載され、前方の映像を撮影する撮影装置と、撮影した撮影映像を無線により送信する第1無線通信装置と、後続する車両に搭載され、第1無線通信装置から送信された撮影映像を受信する第2無線通信装置と、受信した撮影映像を表示する表示装置で構成され、後続する車両の運転者は、先行する車両から送信された撮影映像を表示装置に表示することによって、先行する車両で死角となっている先行する車両の前方に存在する車両や道路状況を把握するものが知られている(例えば、特許文献1参照)。
【特許文献1】特開2003−331396号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の車両走行支援装置においては、後方を走行する車両の運転者は、先行する車両で死角となっている領域に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握することができず、後方を走行する車両の運転者は、自車の安全な車線変更、追い越し、右左折などができないという課題を有していた。
【0005】
本発明は、このような従来の課題を解決するためになされたもので、先行する車両の前方に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握し、さらにこれら車両の移動を予測することによって、自車の安全な車線変更、追い越し、右左折などの走行情報を表示または音声案内することのできる車両走行支援装置を提供することを目的としたものである。
【課題を解決するための手段】
【0006】
本発明の車両走行支援装置は、車両走行支援情報を外部から受信する受信手段と、車両走行支援情報から他車両の走行位置を解析する車両走行位置解析手段と、車両走行支援情報から他車両の報知状況を解析する車両報知情報解析手段と、他車両の走行位置および他車両の報知情報を用いて他車両の移動を予測する移動予測手段と、移動予測手段で予測した他車両の移動予測情報を用いて自車両の走行情報を生成する走行情報生成手段とを有する構成を有している。
【0007】
この構成により、先行する車両の前方に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車などの道路状況などの情報を正確に把握し、自車の安全な車線変更、追い越し、右左折などの走行情報を表示または音声案内などすることができる。
【0008】
また、本発明の車両走行支援装置は、車両走行支援情報は、映像、音声、文字、データのうち少なくとも一つである構成を有している。
【0009】
この構成により、車両走行支援情報は、映像、音声、文字、データのうち少なくとも一つを含むことができる。
【0010】
また、本発明の車両走行支援装置は、車両走行支援情報は、自車両の情報送信装置、他車両の情報送信装置、中継車両、路側装置のうち少なくとも一つから受信する構成を有している。
【0011】
この構成により、車両走行支援情報は、自車両の情報送信装置、他車両の情報送信装置、中継車両、路側装置のうち少なくとも一つから受信することができる。
【0012】
また、本発明の車両走行支援装置は、車両報知情報解析手段は、他車両の方向指示器およびブレーキライトの点灯状況を解析する構成を有している。
【0013】
この構成により、車両報知情報解析手段は、他車両の方向指示器およびブレーキライトの点灯状況を解析することができる。
【0014】
また、本発明の車両走行支援装置は、走行情報生成手段で生成される自車両の走行情報は、自車両の車線変更、直進および右左折に関する情報である構成を有している。
【0015】
この構成により、走行情報生成手段で自車両の車線変更、直進および右左折に関する情報を生成することができる。
【0016】
また、本発明の車両走行支援装置は、走行情報生成手段で生成される他車両の走行情報は、他車両の方向指示器およびブレーキライトの点灯状況に関する情報である構成を有している。
【0017】
この構成により、走行情報生成手段で他車両の方向指示器およびブレーキライトの点灯状況に関する情報を生成することができる。
【0018】
また、本発明の車両走行支援装置は、走行情報生成手段は、車両、トンネル、建物で隠れた他車両や歩行者が存在する場合は、これらを合わせた情報を生成する構成を有している。
【0019】
この構成により、走行情報生成手段は、車両、トンネル、建物の死角に他車両や歩行者が存在する場合は、重ねて表示などすることができる。
【0020】
また、本発明の車両走行支援装置は、車両走行支援情報を送信する情報送信装置は、車両走行支援情報を取得する走行支援情報取得手段と、車両の固有情報を格納する車両情報格納手段と、情報送信装置を搭載した車両の現在位置を検出する現在位置検出手段とを備えた構成を有している。
【0021】
この構成により、車両情報送信装置は、車両の固有情報と現在位置情報を含んだ車両走行支援情報を送信することができる。
【0022】
また、本発明の車両走行支援装置は、車両情報格納手段は、車両寸法に関する情報および車両に設置されたカメラ設置位置に関する情報を格納する構成を有している。
【0023】
この構成により、車両情報格納手段は、車両寸法に関する情報および車両に設置されたカメラ設置位置に関する情報を格納することができる。
【0024】
また、本発明の車両走行支援装置は、他車両の走行位置履歴および他車両の報知履歴を蓄積する車両走行履歴情報蓄積手段を更に備え、移動予測手段は、他車両の走行位置、他車両の報知情報および他車両の車両走行履歴情報を用いて他車両の移動を予測する構成を有している。
【0025】
この構成により、先行する車両の前方に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車などの道路状況などの情報をそれらの履歴に基いて正確に把握し、自車のより安全な車線変更、追い越し、右左折などの走行情報を表示または音声案内などすることができる。
【0026】
また、本発明の車両走行支援装置は、自車両の現在位置を検出する現在位置検出手段と、現在位置検出手段で検出した自車両の現在位置に対応する地図データを道路地図として表示する表示手段とを更に備え、表示手段は、走行情報生成手段で生成された自車両の走行情報を表示または音声案内する構成を有している。
【0027】
この構成により、先行する車両の前方に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車などの道路状況などの情報を自車両との位置関係に基いてより正確に把握し、自車のより安全な車線変更、追い越し、右左折などの走行情報を、地図データと共に表示または音声案内などすることができる。
【発明の効果】
【0028】
本発明の車両走行支援装置は、車両走行支援情報を外部から受信する受信手段と、車両走行支援情報から他車両の走行位置を解析する車両走行位置解析手段と、車両走行支援情報から他車両の報知状況を解析する車両報知情報解析手段と、他車両の走行位置および他車両の報知情報を用いて他車両の移動を予測する移動予測手段と、移動予測手段で予測した他車両の移動予測情報を用いて自車両の走行情報を生成する走行情報生成手段とを備えたことにより、先行する車両の前方に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握し、さらにこれら車両の移動を予測することによって、自車の安全な車線変更、追い越し、右左折などの走行情報を表示または音声案内などすることができるという効果を有する車両走行支援装置を提供することができるものである。
【発明を実施するための最良の形態】
【0029】
以下、本発明の実施の形態の車両走行支援装置について、図面を参照しながら説明する。
【0030】
(実施の形態1)
図1は、本発明の実施の形態1における車両走行支援装置の構成を示すブロック図である。
【0031】
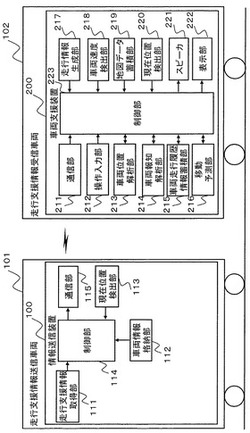
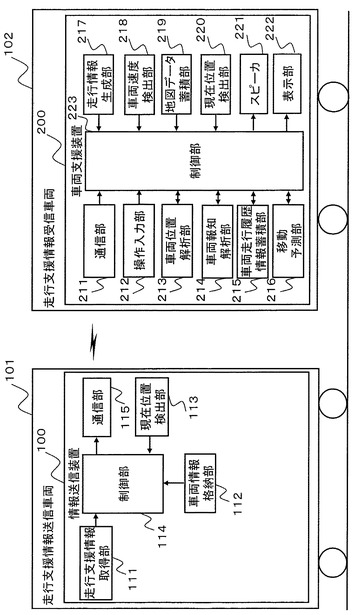
図1において、本実施の形態の車両走行支援装置は、情報送信装置100を搭載した走行支援情報送信車両101と走行支援情報送信車両101の後方を走行し車両支援装置200を搭載した走行支援情報受信車両102とで構成されている。
【0032】
走行支援情報送信車両101に搭載された情報送信装置100は、走行支援情報送信車両101の前方に存在する複数車両の位置情報、これら車両の速度減速、車線変更、右左折などの報知情報、道路形状、信号、道路標識や歩行者、自転車などを含む道路状況などの情報を映像、音声、文字、データなどのうち少なくとも一つを含んだ状態で走行支援情報として取得する走行支援情報取得部111と、各メーカの車両名と車両寸法、走行支援情報送信車両101の車両寸法、走行支援情報送信車両101に搭載されたカメラ位置および撮影角度などの車両情報を格納した車両情報格納部112と、GPS受信機から取得した現在位置データおよび方位データを、車速センサおよび方位センサからのセンサ信号により補正して正確な現在位置を検出する現在位置検出部113と、走行支援情報取得部111で取得した走行支援情報と車両情報格納部112に格納された車両情報と現在位置検出部113で検出した現在位置情報とに基づいて車両走行支援情報を生成する制御部114と、制御部114で生成された車両走行支援情報を、車両支援装置200を搭載した走行支援情報受信車両102へ送信する通信部115とで構成されている。
【0033】
さらに、通信部115は、車両支援装置200を搭載した走行支援情報受信車両102と相互認証を行う認証確認機能と中継車両や路側装置から送信される車両走行支援情報を受信する受信機能をも有している。
【0034】
また、走行支援情報受信車両102に搭載された車両支援装置200は、走行支援情報送信車両101に搭載された情報送信装置100や、中継車両、路側装置などより送信された車両走行支援情報を受信する通信部211と、走行目的地や車両走行支援情報などの入力をするために操作するキーボードやリモコンなどで構成された操作入力部212と、受信した車両走行支援情報から走行支援情報送信車両101の前方に存在する複数車両の走行位置関係を解析する車両位置解析部213と、受信した車両走行支援情報から走行支援情報送信車両101の前方に存在する複数車両の速度減速、車線変更、右左折などの報知を行う方向指示器の点滅やブレーキライトの点灯などの報知情報を解析する車両報知解析部214と、車両位置解析部213から得られた走行支援情報送信車両101の前方に存在する複数車両の走行位置関係と車両報知解析部214から得られた報知情報とに時刻情報を付加して車両走行履歴情報として蓄積する車両走行履歴情報蓄積部215と、車両走行履歴情報蓄積部215に蓄積された車両走行履歴情報を用いて走行支援情報送信車両101の前方に存在する複数車両の速度減速、車線変更、右左折などの移動情報を統計判断により予測する移動予測部216と、車両走行履歴情報蓄積部215に蓄積された車両走行履歴情報と移動予測部216で予測した移動情報に基づいて、自車の安全な車線変更、追い越し、右左折などの走行情報を画像および音声で生成する走行情報生成部217と、車速センサなどで構成された自車の現在の車両速度を検出する車両速度検出部218と、外部装置からダウンロードした地図データを格納したハードディスク装置、またはハードディスク、DVD−ROMなどに記憶された地図データを読み出して蓄積する地図データ蓄積部219と、GPS受信機から取得した現在位置データおよび方位データを、車速センサおよび方位センサからのセンサ信号により補正して正確な現在位置を検出する現在位置検出部220と、目的地までの経路案内、走行途中の注意情報、走行情報生成部217で生成された走行情報の案内などを音声で行うスピーカ221と、地図データ、文字データ、走行情報生成部217で生成された走行情報の画像などを表示する表示部222と、通信部211よりの走行支援情報、操作入力部212よりの入力情報、速度検出部218よりの速度情報、地図データ蓄積部219よりの地図情報、現在位置検出部220よりの現在位置情報などに基づいて、CPU、RAM、ROMなどにより車両支援装置全体の制御を行う制御部223とで構成されている。
【0035】
なお、情報送信措置100の通信部115と車両支援装置200の通信部211間の受信手段は、無線でありそのプロトコルは限定しない。
【0036】
また、車両走行履歴情報蓄積部215には、車両の色、形、登録番号などの車両情報、方向指示器やヘッドライト、ストップライトなどの走行情報などが日時などの時刻情報とともに記憶されている。
【0037】
以上のように構成された車両走行支援装置について、図2のフローチャートを用いてその動作を説明する。
【0038】
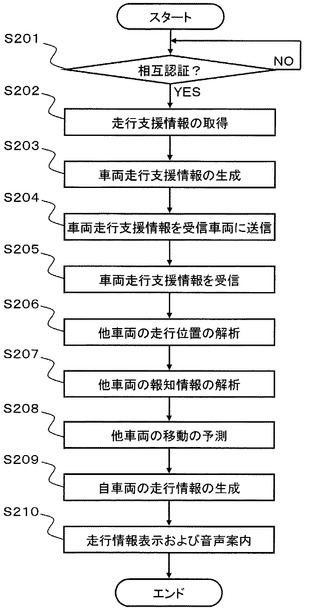
図2において、まず、車両走行支援情報を送信する走行支援情報送信車両101に搭載された情報送信装置100の通信部115と、車両走行支援情報を受信する走行支援情報受信車両102に搭載された車両支援装置200の通信部211は、車両間で車両走行支援情報の送受信を行ってよいかを相互認証する(S201)。
【0039】
相互認証の結果、認証が否の場合(S201のNO)は、車両走行支援情報の送受信動作は行わず、認証動作を繰り返す。
【0040】
相互認証の結果、認証が可の場合(S201のYES)は、走行支援情報送信車両101の走行支援情報取得部111は、前方に存在する複数車両の走行状況、これら車両の速度減速、車線変更、右左折などの報知を行う方向指示器の点滅やブレーキライトの点灯などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況に関する情報を映像、音声、文字、データなどで走行支援情報として取得する(S202)。
【0041】
なお、走行支援情報の取得は、上述の相互認証の結果に関係なく常時取得する構成であってもよい。
【0042】
次に、走行支援情報取得部111で取得した走行支援情報と、車両情報格納部112に格納された車両情報と、現在位置検出部113で検出した現在位置情報とに基づいて、車両走行支援情報を制御部114で生成(S203)し、通信部115より車両走行支援情報として走行支援情報受信車両102に搭載された車両支援装置200に送信する(S204)。
【0043】
走行支援情報受信車両102に搭載された車両支援装置200の通信部211は、走行支援情報を受信する(S205)。
【0044】
次に、走行支援情報受信車両102において、車両位置解析部213は、受信した車両走行支援情報に基づいて走行支援情報送信車両101の前方に存在する複数車両の走行位置を解析し、これら車両の走行位置関係を明確にする(S206)。
【0045】
例えば、受信した車両走行支援情報がステレオカメラなどを用いて撮影した映像である場合は、ステレオ法を用いて各車両間の車間距離を算出することにより、走行支援情報送信車両101の前方に存在する複数車両の走行位置関係を明確にすることができる。
【0046】
また、受信した車両走行支援情報が経度緯度からなる位置データである場合は、各車両のGPS受信機から取得した位置データを用いることにより、走行支援情報送信車両101の前方に存在する複数車両の走行位置関係を明確にすることができる。
【0047】
次に、車両報知解析部214は、受信した車両走行支援情報に基づいて走行支援情報送信車両101の前方に存在する複数車両の報知情報を解析し、これら車両の速度減速、車線変更、右左折などの予告の有無を明確にする(S207)。
【0048】
例えば、受信した走行支援情報がステレオカメラなどを用いて撮影した映像である場合は、映像内で方向指示器、ブレーキライトなどの点灯点滅の有無を抽出することにより、走行支援情報送信車両101の前方に存在する複数車両の報知状況を明確にすることができる。
【0049】
次に、移動予測部216は、車両位置解析部213から得られた走行支援情報送信車両101の前方に存在する複数車両の走行位置関係と、車両報知解析部214から得られた報知情報に時刻情報を付加した車両走行履歴情報とを用いて、例えば、移動回数が多い車両が周囲に存在しないか、現時点で自車両が移動した後に周囲の車両との間で十分な車間距離を確保できるかなど、走行支援情報送信車両101の前方や周囲に存在する複数車両の移動を予測する(S208)。
【0050】
次に、走行情報生成部217は、移動予測部216で予測した移動予測情報に基づいて走行支援情報受信車両102が安全に走行できる車線変更、追い越し、右左折などの走行情報を生成し(S209)、表示部222に走行支援情報受信車両102と走行支援情報受信車両102の前方を走行する複数車両の走行位置関係、報知状況、道路状況などとともに走行支援情報受信車両102の走行情報を画像表示する。また、必要に応じてスピーカ221より音声にて案内する(S210)。
【0051】
なお、本実施の形態では、車両走行支援情報を送信する情報送信装置100を搭載した走行支援情報送信車両101と車両走行支援情報を受信する車両支援装置200を搭載した走行支援情報受信車両102は別々の車両として説明したが、車両走行支援情報を送信する情報送信装置100と車両走行支援情報を受信する車両支援装置200を同一車両に搭載された形態であってもよい。
【0052】
また、情報送信装置100の走行支援情報取得部111は、車両支援装置200を搭載した走行支援情報受信車両102から遠隔操作制御される構成であってもよい。例えば、走行支援情報取得部111が映像入力可能なステレオカメラである場合は、カメラの高さや撮影方向などを自在に制御することによって走行支援情報受信車両102を運転する運転者はより欲しい有益な情報を入手することが可能となる。
【0053】
また、走行支援情報送信車両101から送信される車両走行支援情報は、複数の走行支援情報受信車両102に同時に送信、または特定の走行支援情報受信車両102にのみ送信する構成も可能である。
【0054】
以下に、本実施の形態における車両走行支援装置の表示部に表示される表示例および音声案内される音声例を示す。
【0055】
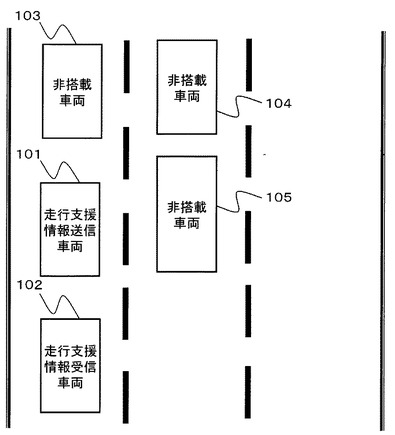
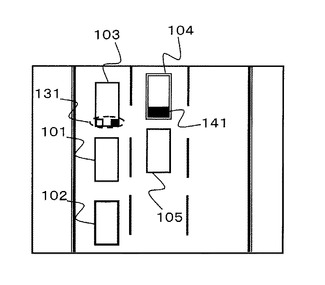
まず、図3は、複数車線道路において、車両走行支援情報を送信する車両が車両走行支援情報を受信する車両の前方を他の車両と走行中の説明図である。
【0056】
図3において、車両101は、車両走行支援情報を送信する情報送信装置100を搭載した走行支援情報送信車両、車両102は、車両走行支援情報を受信する車両支援装置200を搭載した走行支援情報受信車両、車両104は、車両走行支援装置の非搭載車両で消防車、パトカー、バスなどの特殊公共車両、車両103、105は、車両走行支援装置の非搭載車両で他の一般車両を表わしている。
【0057】
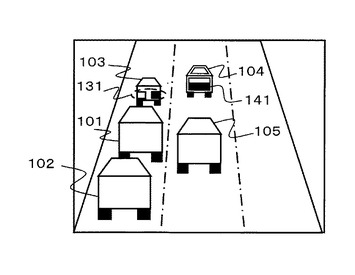
この状態で走行している過程において、車両走行支援装置の非搭載車両103が方向指示器により車線変更を周囲車両に報知し、さらに車両走行支援装置の非搭載車両104がブレーキライトにより車速速度の減速を周囲車両に報知している状況が発生した場合にお
ける、車両走行支援装置の表示部222に表示される平面表示例を図4に、立体表示例を図5に示す。
【0058】
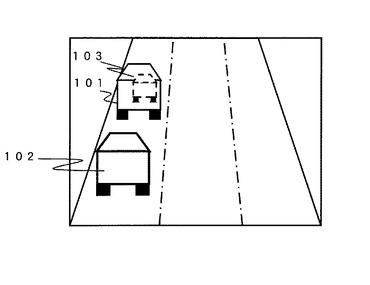
図4、図5において、車両103は、方向指示器131により車線変更の報知を行い、車両104は、ブレーキライト141により車速速度の減速報知を行っている様子を示している。
【0059】
すなわち、車両102の運転者は、自車両に搭載された車両支援装置200の表示部に表示された図4、図5を視認することによって、自車両102と先行する車両の前方に存在する目視できない車両103、104と、先行する車両101と目視できる車両105の走行位置関係および車両103の車線変更報知状況、車両104の速度減速の報知状況を把握することができる。また、「車両103が右に車線変更します」、「車両104が減速します」などの音声案内によって報知状況を把握することができる。
【0060】
報知情報は、以下の表示例についても同様であるが、本実施の形態のように、表示部222への画像表示と併せて音声案内で提示することも出来るが、音声案内のみによる提示であっても、本発明の効果は得られる。
【0061】
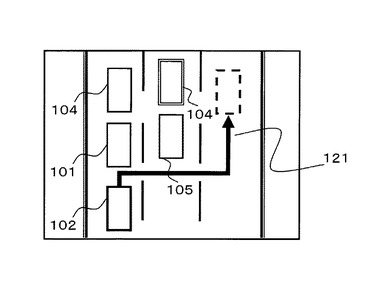
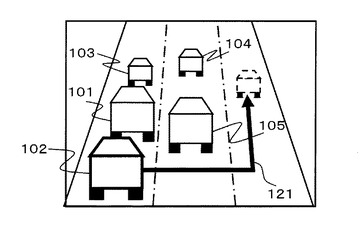
また、図6、図7は、本実施の形態における車両走行支援装置の表示部222に表示される他の平面表示例と立体表示例を示す図である。
【0062】
図6、図7において、図4、図5と同じ構成については同一番号を付し説明を省略する。
【0063】
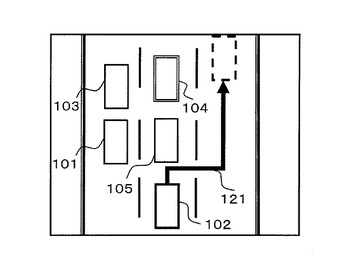
図4、図5との相違点は、車両103の車線変更の報知状況と車両104の速度減速の報知状況がない状態で、車両102の車線変更路121を走行情報として表示部222に重ねて表示したことである。
【0064】
車両102の運転者は、自車両に搭載された車両支援装置200の表示部222に表示された図6、図7を視認することによって自車の車線変更や追い越しを安全に行うことができる。
【0065】
また、「右に車線変更できます」、「追い越しが出来ます」などの音声案内によって安全な進路変更を行うことができる。
【0066】
また、図8は、本実施の形態における車両走行支援装置の表示部222に表示される他の平面表示例を示す図である。
【0067】
図8において、図6と同じ構成については同一番号を付し説明を省略する。
【0068】
図6との相違点は、走行支援情報を送信する車両101は外側の走行車線を走行し、走行支援情報を受信する車両102は、内側の走行車線を走行していることである。
【0069】
この場合も図6と同様に、車両102の運転者は、自車両に搭載された車両支援装置200の表示部222に表示された図8を視認することによって自車の車線変更や追い越しを安全に行うことができる。
【0070】
また、図9は、本実施の形態における車両走行支援装置の表示部222に表示される他の立体表示例である。
【0071】
図9において、車両101は、車両走行支援情報を送信する情報送信装置100を搭載した走行支援情報送信車両、車両102は、車両走行支援情報を受信する車両支援装置200を搭載した走行支援情報受信車両、車両103は、車両走行支援装置の非搭載車両を表わしている。
【0072】
車両101の前方を車両103が比較的接近して走行している状態で、車両101と車両103を重ね合わせて表示し、かつ、前方の車両103は後方の車両101より小さく表示したものである。
【0073】
車両102の運転者は、自車両に搭載された車両支援装置200の表示部222に表示された図9を視認することによって先行する車両の前方に他の車両が存在することを把握することができる。
【0074】
以上の実施の形態では、複数車線走行において、車両走行支援情報を送信する車両101と車両走行支援情報を受信する車両102が1対1で存在し走行する状況について、複数車両の走行位置、各車両の報知情報、および自車両の周囲の複数車両の行方を予測して自車両の安全な追い越し、車線変更等の移動情報を表示する場合について説明したが、本発明は、次のような形態でも同様の効果が得られる。
【0075】
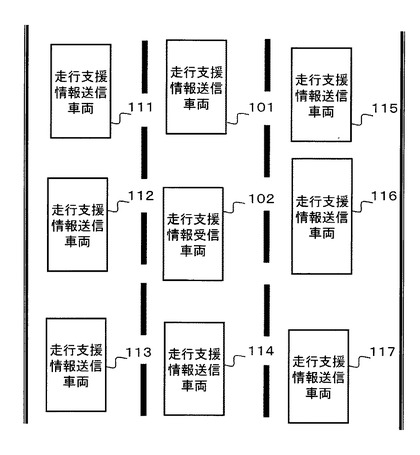
図10は、複数車線道路において、車両走行支援情報を送信する複数の車両が車両走行支援情報を受信する車両の前後左右を走行中の説明図である。
【0076】
図10において、車両101、111、112、113、114、115、116、117は、車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両で、車両102は、車両走行支援情報を受信する車両支援装置を搭載した走行支援情報受信車両である。
【0077】
車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両101、111〜117は、各々の情報送信装置が取得した車両走行支援情報を車両102に送信し、車両102の車両支援装置は、受信した車両走行支援情報をもとに解析処理して、前述と同様に車両支援装置の表示部に平面表示または立体表示を行う。
【0078】
具体的な平面表示例または立体表示例は、前述と同様のため省略する。
【0079】
前後左右を走行する複数の走行支援情報送信車両より車両走行支援情報を受信することによって、車両102の運転手は、より多く且つより詳細な車両走行支援情報を取得できるとともに、自車と周囲車両の走行位置関係がより明確に把握できる。
【0080】
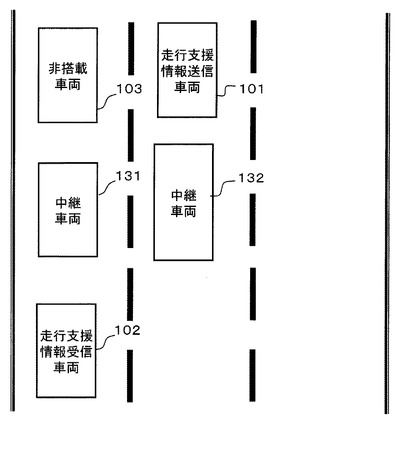
また、図11は、複数車線道路において、車両走行支援情報を送信する車両と車両走行支援情報を受信する車両との間に、車両走行支援情報を中継する中継車両が入った状態の走行中の説明図である。
【0081】
図11において、車両101は、車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両、車両102は、車両走行支援情報を受信する車両支援装置を搭載した走行支援情報受信車両、車両131、132は、車両走行支援情報を中継する中継車両、車両103は、車両走行支援装置の非搭載車両である。
【0082】
車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両101は、車両走行支援情報を中継車両131または中継車両132に一旦送信し、車両走行支援情報を受信した中継車両131または中継車両132は、車両走行支援情報を受信する車両
支援装置を搭載した走行支援情報受信車両102に送信し、走行支援情報受信車両102の車両支援装置は、受信した車両走行支援情報をもとに解析処理して、前述と同様に車両支援装置の表示部に平面表示または立体表示を行う。
【0083】
具体的な平面表示例または立体表示例は、前述と同様のため省略する。
【0084】
中継車両を経由して車両走行支援情報を受信することによって、車両102の運転手は、より前方を走行する他車両の走行位置関係、他車両の報知状況、道路状況など予め把握できる。
【0085】
なお、本実施の形態では、中継車両が横列位置にある場合について説明したが、縦列位置にある複数の中継車両を経由して車両走行支援情報を受信する構成も可能で、このように構成することによってより前方を走行する他車両の走行位置関係、他車両の報知状況、道路状況などがより早期に把握できる。
【0086】
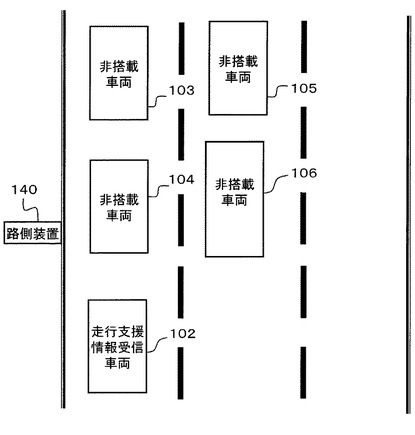
また、図12は、側路に路側装置が施設された複数車線道路において、走行支援情報を受信する車両と他の車両が走行中の説明図である。
【0087】
図12において、車両102は、車両走行支援情報を受信する車両支援装置を搭載した走行支援情報受信車両で、車両103、104、105、106は、車両走行支援装置の非搭載車両で、側路に施設された側路装置140は、走行中の車両の種別や速度などの情報収集と走行中の車両に向けて交通量情報、渋滞情報などの各種の車両走行支援情報を常時発信している。
【0088】
側路装置から発信された車両走行支援情報を受信した車両102の車両支援装置は、受信した車両走行支援情報をもとに解析処理して、前述と同様に車両支援装置の表示部に平面表示または立体表示を行う。
【0089】
具体的な平面表示例または立体表示例は、前述と同様のため省略する。
【0090】
車両走行支援情報を側路装置から受信することによって、車両走行支援情報を受信する車両支援装置を搭載した走行支援情報受信車両は、車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両との併走を必要とせずに前方を走行する車両の走行位置関係、車両の報知状況、道路状況などが把握できる。
【0091】
なお、上述では、片側複数車線道路を直進走行する場合について説明したが、片側一車線道路においても、対向車線を走行する車両の走行位置、右左折などの報知情報を把握でき、車両走行支援装置の表示部に表示できるため安全な追い越し、右左折などが可能となる。
【0092】
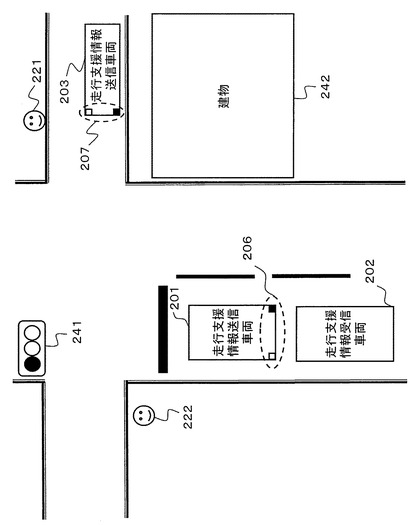
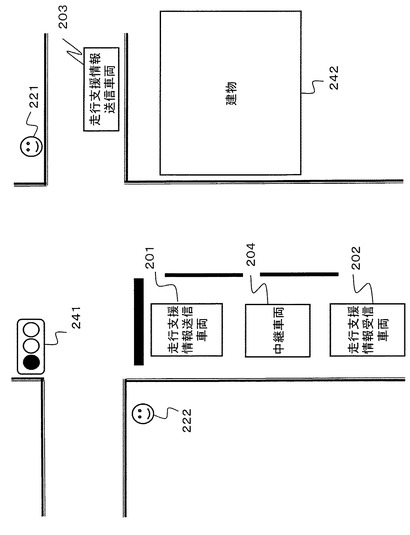
さらに、図13は、道路幅の広い道路側にのみ信号の設置された交差点において、車両走行支援情報を送信する車両が車両走行支援情報を受信する車両の前方に停車中の説明図である。
【0093】
図13において、車両201、203は、車両走行支援情報を送信する情報送信装置100を搭載した走行支援情報送信車両、車両202は、車両走行支援情報を受信する車両支援装置200を搭載した走行支援情報受信車両で、車両201は、信号241により停止し方向指示器206により右折することを周囲車両および歩行者に報知を行い、車両203は、方向指示器207により左折することを周囲車両および歩行者に報知を行っている状態である。
【0094】
歩行者221、222は、交差点を横断するために信号待ちしている状態である。信号機241は、交差する道路幅の広い道路側にのみ設置されており、信号が赤から青に変わった直後の状態である。走行支援情報送信車両201からは、車両203、歩行者221の存在を直接確認できるが、走行支援情報受信車両202からは、建物242の死角になり車両203および歩行者221の存在を確認できない。
【0095】
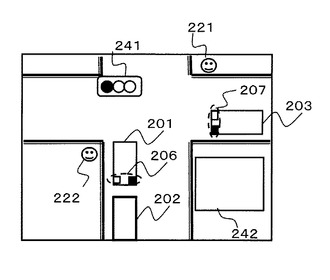
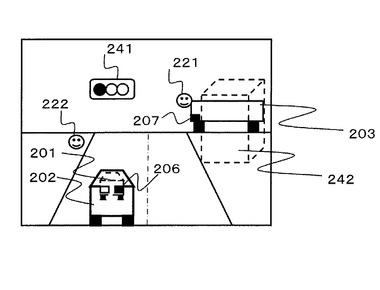
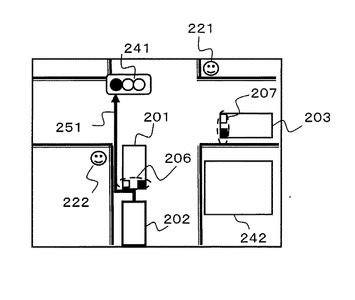
このような状態における車両走行支援装置の表示部222に表示される平面表示例を図14、立体表示例を図15に示す。
【0096】
図14、図15において、車両201は、方向指示器206により右折の報知を行い、車両203は、方向指示器207により左折の報知を行っている様子を示している。さらに、歩行者221、222が交差点の脇に居ることと、信号機241が交差点に設置されておりその信号状況と、建物242が存在することを示している。
【0097】
また、図15においては、建物242を透かして、建物242で死角となっている領域に存在する車両203と歩行者221を表示している。
【0098】
車両202の運転手は、自車両に搭載された車両支援装置200の表示部222に表示された図14、図15の表示を視認することによって、交差点の信号状況と、建物242で死角となっている領域に存在する左折しようとして方向指示器207で報知している車両203と歩行者221と、交差点脇に居る歩行者222を確認でき、運転に注意することができる。また、「次の交差点の右方に、左折する車両があります」、「次の交差点に、歩行者が居ます」などの音声案内によって交差点の状況を把握することができる。
【0099】
なお、本実施の形態の立体表示例では、建物で死角となる領域に存在する車両と歩行者について説明したが、建物以外にトンネル、陸橋などで車両、歩行者が隠れてしまう場合も同様に表示することが可能である。
【0100】
また、図16、図17、図18は、道路幅の広い道路側にのみ信号の設置された交差点付近における、車両走行支援装置の表示部222に表示される他の平面表示例である。
【0101】
図16、図17、図18において、図14と同じ構成に関しては同一番号を付して説明を省略する。
【0102】
図16と図14との相違点は、車両202の直進路251を走行情報として表示部に重ねて表示したことである。
【0103】
車両202の運転手は、自車両に搭載された車両支援装置200の表示部222に表示された図16を視認することによって、前の車両が交差点で右折するため道路の左側によって走行し、且つ左側には歩行者が居ることが把握でき、運転に注意することができる。また、「左側によって走行してください」、「次の交差点の左側に、歩行者が居ます」などの音声案内によって交差点の状況を把握することができる。
【0104】
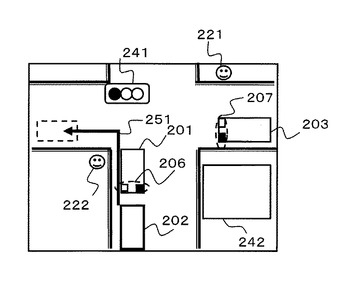
また、図17と図14との相違点は、車両202の左折路251を走行情報として表示部222に重ねて表示したことである。
【0105】
車両202の運転手は、自車両に搭載された車両支援装置200の表示部222に表示された図17を視認することによって、左折する方向の交差点に歩行者222が居ることが把握でき、運転に注意することができる。また、「歩行者が居ますので注意して左折し
てください」などの音声案内よって交差点の状況を把握することができる。
【0106】
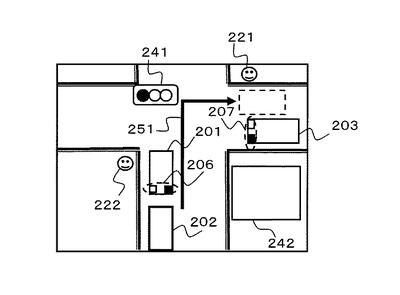
また、図18と図14との相違点は、車両202の右折路251を走行情報として表示部に重ねて表示したことである。
【0107】
車両202の運転手は、自車両に搭載された車両支援装置200の表示部222に表示された図18を視認することによって、建物242で死角となっている領域に左折しようとする車両203と歩行者221が居ることが把握でき、運転に注意することができる。また、「歩行者が居ますので注意して右折してください」などの音声案内によって交差点の状況を把握することができる。
【0108】
また、図19は、道路幅の広い道路側にのみ信号の設置された交差点において、車両走行支援情報を送信する車両と車両走行支援情報を受信する車両との間に、車両走行支援情報を中継する中継車両が入った状態で停車中の説明図である。
【0109】
図19において、図13と同じ構成に関しては同一番号を付して説明を省略する。
【0110】
図13との相違点は、車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両201は、車両走行支援情報を中継車両204に一旦送信し、車両走行支援情報を受信した中継車両204は、車両走行支援情報を受信する車両支援装置を搭載した走行支援情報受信車両202に送信し、走行支援情報受信車両202の車両支援装置は、受信した車両走行支援情報をもとに解析処理して、前述と同様に車両支援装置の表示部に平面表示または立体表示を行う。
【0111】
具体的な平面表示例または立体表示例は、前述と同様のため省略する。
【0112】
中継車両を経由して車両走行支援情報を受信することによって、車両202の運転手は、自車両に搭載された車両支援装置200の表示部222に表示された内容を視認することによって、交差点からより離れた位置にいながら交差点の信号状況と、建物241で死角となっている領域に存在する車両211と歩行者と、交差点脇に居る歩行者221を確認でき、運転に注意することができる。
【0113】
以上のように、本実施の形態の車両走行支援装置によれば、先行する車両の前方や建物で死角となっている領域に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握できる。さらに、これら他車両の移動を予測し、自車の安全な車線変更、追い越し、右左折などの走行情報を表示部に表示または音声で案内するため、本発明の車両走行支援装置を搭載した車両の運転手は、自車の安全な車線変更、追い越し、右左折などが可能となる。
【0114】
なお、本実施の形態の表示例で車両支援装置200の表示部222に表示される方向指示器およびストップライトの形状、色、点滅、点灯、音など、また表示部に表示される自車両、特殊公共車両および一般車両の形状、色、点滅、点灯など、さらに表示部222に表示される車線変更路、直進路および右左折路などの走行情報を示す表示の線種、色、点滅、点灯など、さらに表示部222に表示される信号機や歩行者などの形状、色、点滅、点灯、音などは、表示例に示された内容に限定されることはなく、表示部222を視認する運転手が確認しやすいものであれば何れでもよい。
【産業上の利用可能性】
【0115】
以上のように、本発明にかかる車両走行支援装置は、受信した車両走行支援情報に基づ
いて、自車から目視できない車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握し、表示部に表示または音声案内するため、車両の安全走行を促す車両走行支援装置として有用である。
【図面の簡単な説明】
【0116】
【図1】本発明の実施の形態1における車両走行支援装置の構成を示すブロック図
【図2】本発明の実施の形態1における車両走行支援装置の動作を示すフローチャート
【図3】本発明の実施の形態1における車両走行支援装置を搭載した車両の走行説明図
【図4】本発明の実施の形態1における車両走行支援装置の表示部に表示される平面表示例を示す図
【図5】本発明の実施の形態1における車両走行支援装置の表示部に表示される立体表示例を示す図
【図6】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図7】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の立体表示例を示す図
【図8】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図9】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の立体表示例を示す図
【図10】本発明の実施の形態1における車両走行支援装置を搭載した車両の他の走行説明図
【図11】本発明の実施の形態1における車両走行支援装置を搭載した車両と中継車両の走行説明図
【図12】本発明の実施の形態1における車両走行支援装置を搭載した車両と路側装置との関係を示す走行説明図
【図13】本発明の実施の形態1における車両走行支援装置を搭載した車両の交差点付近での走行説明図
【図14】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図15】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の立体表示例を示す図
【図16】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図17】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図18】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図19】本発明の実施の形態1における車両走行支援装置を搭載した車両の他の走行説明図
【符号の説明】
【0117】
100 情報送信装置
101 走行支援情報送信車両
102 走行支援情報受信車両
111 走行支援情報取得部
112 車両情報格納部
113,220 現在位置検出部
114,223 制御部
115,211 通信部
200 車両支援装置
212 操作入力部
213 車両位置解析部
214 車両報知解析部
215 車両走行履歴情報蓄積部
216 移動予測部
217 走行情報生成部
218 車両速度検出部
219 地図データ蓄積部
221 スピーカ
222 表示部
【技術分野】
【0001】
本発明は、周囲に存在する他車両などから送信される映像、音声、文字、データなどの情報に基づいて、自車から目視できない領域に存在する他車両の走行位置、道路形状、信号、道路標識や歩行者、自転車などの状況を把握することができる車両走行支援装置に関するものである。
【背景技術】
【0002】
大型車などの後方を走行している車両の運転者は、先行する大型車に視界が遮られて自車線および隣接車線の前方の様子を把握できないことが多々ある。
【0003】
この問題を解決するための従来の車両走行支援装置としては、先行する車両に搭載され、前方の映像を撮影する撮影装置と、撮影した撮影映像を無線により送信する第1無線通信装置と、後続する車両に搭載され、第1無線通信装置から送信された撮影映像を受信する第2無線通信装置と、受信した撮影映像を表示する表示装置で構成され、後続する車両の運転者は、先行する車両から送信された撮影映像を表示装置に表示することによって、先行する車両で死角となっている先行する車両の前方に存在する車両や道路状況を把握するものが知られている(例えば、特許文献1参照)。
【特許文献1】特開2003−331396号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の車両走行支援装置においては、後方を走行する車両の運転者は、先行する車両で死角となっている領域に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握することができず、後方を走行する車両の運転者は、自車の安全な車線変更、追い越し、右左折などができないという課題を有していた。
【0005】
本発明は、このような従来の課題を解決するためになされたもので、先行する車両の前方に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握し、さらにこれら車両の移動を予測することによって、自車の安全な車線変更、追い越し、右左折などの走行情報を表示または音声案内することのできる車両走行支援装置を提供することを目的としたものである。
【課題を解決するための手段】
【0006】
本発明の車両走行支援装置は、車両走行支援情報を外部から受信する受信手段と、車両走行支援情報から他車両の走行位置を解析する車両走行位置解析手段と、車両走行支援情報から他車両の報知状況を解析する車両報知情報解析手段と、他車両の走行位置および他車両の報知情報を用いて他車両の移動を予測する移動予測手段と、移動予測手段で予測した他車両の移動予測情報を用いて自車両の走行情報を生成する走行情報生成手段とを有する構成を有している。
【0007】
この構成により、先行する車両の前方に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車などの道路状況などの情報を正確に把握し、自車の安全な車線変更、追い越し、右左折などの走行情報を表示または音声案内などすることができる。
【0008】
また、本発明の車両走行支援装置は、車両走行支援情報は、映像、音声、文字、データのうち少なくとも一つである構成を有している。
【0009】
この構成により、車両走行支援情報は、映像、音声、文字、データのうち少なくとも一つを含むことができる。
【0010】
また、本発明の車両走行支援装置は、車両走行支援情報は、自車両の情報送信装置、他車両の情報送信装置、中継車両、路側装置のうち少なくとも一つから受信する構成を有している。
【0011】
この構成により、車両走行支援情報は、自車両の情報送信装置、他車両の情報送信装置、中継車両、路側装置のうち少なくとも一つから受信することができる。
【0012】
また、本発明の車両走行支援装置は、車両報知情報解析手段は、他車両の方向指示器およびブレーキライトの点灯状況を解析する構成を有している。
【0013】
この構成により、車両報知情報解析手段は、他車両の方向指示器およびブレーキライトの点灯状況を解析することができる。
【0014】
また、本発明の車両走行支援装置は、走行情報生成手段で生成される自車両の走行情報は、自車両の車線変更、直進および右左折に関する情報である構成を有している。
【0015】
この構成により、走行情報生成手段で自車両の車線変更、直進および右左折に関する情報を生成することができる。
【0016】
また、本発明の車両走行支援装置は、走行情報生成手段で生成される他車両の走行情報は、他車両の方向指示器およびブレーキライトの点灯状況に関する情報である構成を有している。
【0017】
この構成により、走行情報生成手段で他車両の方向指示器およびブレーキライトの点灯状況に関する情報を生成することができる。
【0018】
また、本発明の車両走行支援装置は、走行情報生成手段は、車両、トンネル、建物で隠れた他車両や歩行者が存在する場合は、これらを合わせた情報を生成する構成を有している。
【0019】
この構成により、走行情報生成手段は、車両、トンネル、建物の死角に他車両や歩行者が存在する場合は、重ねて表示などすることができる。
【0020】
また、本発明の車両走行支援装置は、車両走行支援情報を送信する情報送信装置は、車両走行支援情報を取得する走行支援情報取得手段と、車両の固有情報を格納する車両情報格納手段と、情報送信装置を搭載した車両の現在位置を検出する現在位置検出手段とを備えた構成を有している。
【0021】
この構成により、車両情報送信装置は、車両の固有情報と現在位置情報を含んだ車両走行支援情報を送信することができる。
【0022】
また、本発明の車両走行支援装置は、車両情報格納手段は、車両寸法に関する情報および車両に設置されたカメラ設置位置に関する情報を格納する構成を有している。
【0023】
この構成により、車両情報格納手段は、車両寸法に関する情報および車両に設置されたカメラ設置位置に関する情報を格納することができる。
【0024】
また、本発明の車両走行支援装置は、他車両の走行位置履歴および他車両の報知履歴を蓄積する車両走行履歴情報蓄積手段を更に備え、移動予測手段は、他車両の走行位置、他車両の報知情報および他車両の車両走行履歴情報を用いて他車両の移動を予測する構成を有している。
【0025】
この構成により、先行する車両の前方に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車などの道路状況などの情報をそれらの履歴に基いて正確に把握し、自車のより安全な車線変更、追い越し、右左折などの走行情報を表示または音声案内などすることができる。
【0026】
また、本発明の車両走行支援装置は、自車両の現在位置を検出する現在位置検出手段と、現在位置検出手段で検出した自車両の現在位置に対応する地図データを道路地図として表示する表示手段とを更に備え、表示手段は、走行情報生成手段で生成された自車両の走行情報を表示または音声案内する構成を有している。
【0027】
この構成により、先行する車両の前方に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車などの道路状況などの情報を自車両との位置関係に基いてより正確に把握し、自車のより安全な車線変更、追い越し、右左折などの走行情報を、地図データと共に表示または音声案内などすることができる。
【発明の効果】
【0028】
本発明の車両走行支援装置は、車両走行支援情報を外部から受信する受信手段と、車両走行支援情報から他車両の走行位置を解析する車両走行位置解析手段と、車両走行支援情報から他車両の報知状況を解析する車両報知情報解析手段と、他車両の走行位置および他車両の報知情報を用いて他車両の移動を予測する移動予測手段と、移動予測手段で予測した他車両の移動予測情報を用いて自車両の走行情報を生成する走行情報生成手段とを備えたことにより、先行する車両の前方に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握し、さらにこれら車両の移動を予測することによって、自車の安全な車線変更、追い越し、右左折などの走行情報を表示または音声案内などすることができるという効果を有する車両走行支援装置を提供することができるものである。
【発明を実施するための最良の形態】
【0029】
以下、本発明の実施の形態の車両走行支援装置について、図面を参照しながら説明する。
【0030】
(実施の形態1)
図1は、本発明の実施の形態1における車両走行支援装置の構成を示すブロック図である。
【0031】
図1において、本実施の形態の車両走行支援装置は、情報送信装置100を搭載した走行支援情報送信車両101と走行支援情報送信車両101の後方を走行し車両支援装置200を搭載した走行支援情報受信車両102とで構成されている。
【0032】
走行支援情報送信車両101に搭載された情報送信装置100は、走行支援情報送信車両101の前方に存在する複数車両の位置情報、これら車両の速度減速、車線変更、右左折などの報知情報、道路形状、信号、道路標識や歩行者、自転車などを含む道路状況などの情報を映像、音声、文字、データなどのうち少なくとも一つを含んだ状態で走行支援情報として取得する走行支援情報取得部111と、各メーカの車両名と車両寸法、走行支援情報送信車両101の車両寸法、走行支援情報送信車両101に搭載されたカメラ位置および撮影角度などの車両情報を格納した車両情報格納部112と、GPS受信機から取得した現在位置データおよび方位データを、車速センサおよび方位センサからのセンサ信号により補正して正確な現在位置を検出する現在位置検出部113と、走行支援情報取得部111で取得した走行支援情報と車両情報格納部112に格納された車両情報と現在位置検出部113で検出した現在位置情報とに基づいて車両走行支援情報を生成する制御部114と、制御部114で生成された車両走行支援情報を、車両支援装置200を搭載した走行支援情報受信車両102へ送信する通信部115とで構成されている。
【0033】
さらに、通信部115は、車両支援装置200を搭載した走行支援情報受信車両102と相互認証を行う認証確認機能と中継車両や路側装置から送信される車両走行支援情報を受信する受信機能をも有している。
【0034】
また、走行支援情報受信車両102に搭載された車両支援装置200は、走行支援情報送信車両101に搭載された情報送信装置100や、中継車両、路側装置などより送信された車両走行支援情報を受信する通信部211と、走行目的地や車両走行支援情報などの入力をするために操作するキーボードやリモコンなどで構成された操作入力部212と、受信した車両走行支援情報から走行支援情報送信車両101の前方に存在する複数車両の走行位置関係を解析する車両位置解析部213と、受信した車両走行支援情報から走行支援情報送信車両101の前方に存在する複数車両の速度減速、車線変更、右左折などの報知を行う方向指示器の点滅やブレーキライトの点灯などの報知情報を解析する車両報知解析部214と、車両位置解析部213から得られた走行支援情報送信車両101の前方に存在する複数車両の走行位置関係と車両報知解析部214から得られた報知情報とに時刻情報を付加して車両走行履歴情報として蓄積する車両走行履歴情報蓄積部215と、車両走行履歴情報蓄積部215に蓄積された車両走行履歴情報を用いて走行支援情報送信車両101の前方に存在する複数車両の速度減速、車線変更、右左折などの移動情報を統計判断により予測する移動予測部216と、車両走行履歴情報蓄積部215に蓄積された車両走行履歴情報と移動予測部216で予測した移動情報に基づいて、自車の安全な車線変更、追い越し、右左折などの走行情報を画像および音声で生成する走行情報生成部217と、車速センサなどで構成された自車の現在の車両速度を検出する車両速度検出部218と、外部装置からダウンロードした地図データを格納したハードディスク装置、またはハードディスク、DVD−ROMなどに記憶された地図データを読み出して蓄積する地図データ蓄積部219と、GPS受信機から取得した現在位置データおよび方位データを、車速センサおよび方位センサからのセンサ信号により補正して正確な現在位置を検出する現在位置検出部220と、目的地までの経路案内、走行途中の注意情報、走行情報生成部217で生成された走行情報の案内などを音声で行うスピーカ221と、地図データ、文字データ、走行情報生成部217で生成された走行情報の画像などを表示する表示部222と、通信部211よりの走行支援情報、操作入力部212よりの入力情報、速度検出部218よりの速度情報、地図データ蓄積部219よりの地図情報、現在位置検出部220よりの現在位置情報などに基づいて、CPU、RAM、ROMなどにより車両支援装置全体の制御を行う制御部223とで構成されている。
【0035】
なお、情報送信措置100の通信部115と車両支援装置200の通信部211間の受信手段は、無線でありそのプロトコルは限定しない。
【0036】
また、車両走行履歴情報蓄積部215には、車両の色、形、登録番号などの車両情報、方向指示器やヘッドライト、ストップライトなどの走行情報などが日時などの時刻情報とともに記憶されている。
【0037】
以上のように構成された車両走行支援装置について、図2のフローチャートを用いてその動作を説明する。
【0038】
図2において、まず、車両走行支援情報を送信する走行支援情報送信車両101に搭載された情報送信装置100の通信部115と、車両走行支援情報を受信する走行支援情報受信車両102に搭載された車両支援装置200の通信部211は、車両間で車両走行支援情報の送受信を行ってよいかを相互認証する(S201)。
【0039】
相互認証の結果、認証が否の場合(S201のNO)は、車両走行支援情報の送受信動作は行わず、認証動作を繰り返す。
【0040】
相互認証の結果、認証が可の場合(S201のYES)は、走行支援情報送信車両101の走行支援情報取得部111は、前方に存在する複数車両の走行状況、これら車両の速度減速、車線変更、右左折などの報知を行う方向指示器の点滅やブレーキライトの点灯などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況に関する情報を映像、音声、文字、データなどで走行支援情報として取得する(S202)。
【0041】
なお、走行支援情報の取得は、上述の相互認証の結果に関係なく常時取得する構成であってもよい。
【0042】
次に、走行支援情報取得部111で取得した走行支援情報と、車両情報格納部112に格納された車両情報と、現在位置検出部113で検出した現在位置情報とに基づいて、車両走行支援情報を制御部114で生成(S203)し、通信部115より車両走行支援情報として走行支援情報受信車両102に搭載された車両支援装置200に送信する(S204)。
【0043】
走行支援情報受信車両102に搭載された車両支援装置200の通信部211は、走行支援情報を受信する(S205)。
【0044】
次に、走行支援情報受信車両102において、車両位置解析部213は、受信した車両走行支援情報に基づいて走行支援情報送信車両101の前方に存在する複数車両の走行位置を解析し、これら車両の走行位置関係を明確にする(S206)。
【0045】
例えば、受信した車両走行支援情報がステレオカメラなどを用いて撮影した映像である場合は、ステレオ法を用いて各車両間の車間距離を算出することにより、走行支援情報送信車両101の前方に存在する複数車両の走行位置関係を明確にすることができる。
【0046】
また、受信した車両走行支援情報が経度緯度からなる位置データである場合は、各車両のGPS受信機から取得した位置データを用いることにより、走行支援情報送信車両101の前方に存在する複数車両の走行位置関係を明確にすることができる。
【0047】
次に、車両報知解析部214は、受信した車両走行支援情報に基づいて走行支援情報送信車両101の前方に存在する複数車両の報知情報を解析し、これら車両の速度減速、車線変更、右左折などの予告の有無を明確にする(S207)。
【0048】
例えば、受信した走行支援情報がステレオカメラなどを用いて撮影した映像である場合は、映像内で方向指示器、ブレーキライトなどの点灯点滅の有無を抽出することにより、走行支援情報送信車両101の前方に存在する複数車両の報知状況を明確にすることができる。
【0049】
次に、移動予測部216は、車両位置解析部213から得られた走行支援情報送信車両101の前方に存在する複数車両の走行位置関係と、車両報知解析部214から得られた報知情報に時刻情報を付加した車両走行履歴情報とを用いて、例えば、移動回数が多い車両が周囲に存在しないか、現時点で自車両が移動した後に周囲の車両との間で十分な車間距離を確保できるかなど、走行支援情報送信車両101の前方や周囲に存在する複数車両の移動を予測する(S208)。
【0050】
次に、走行情報生成部217は、移動予測部216で予測した移動予測情報に基づいて走行支援情報受信車両102が安全に走行できる車線変更、追い越し、右左折などの走行情報を生成し(S209)、表示部222に走行支援情報受信車両102と走行支援情報受信車両102の前方を走行する複数車両の走行位置関係、報知状況、道路状況などとともに走行支援情報受信車両102の走行情報を画像表示する。また、必要に応じてスピーカ221より音声にて案内する(S210)。
【0051】
なお、本実施の形態では、車両走行支援情報を送信する情報送信装置100を搭載した走行支援情報送信車両101と車両走行支援情報を受信する車両支援装置200を搭載した走行支援情報受信車両102は別々の車両として説明したが、車両走行支援情報を送信する情報送信装置100と車両走行支援情報を受信する車両支援装置200を同一車両に搭載された形態であってもよい。
【0052】
また、情報送信装置100の走行支援情報取得部111は、車両支援装置200を搭載した走行支援情報受信車両102から遠隔操作制御される構成であってもよい。例えば、走行支援情報取得部111が映像入力可能なステレオカメラである場合は、カメラの高さや撮影方向などを自在に制御することによって走行支援情報受信車両102を運転する運転者はより欲しい有益な情報を入手することが可能となる。
【0053】
また、走行支援情報送信車両101から送信される車両走行支援情報は、複数の走行支援情報受信車両102に同時に送信、または特定の走行支援情報受信車両102にのみ送信する構成も可能である。
【0054】
以下に、本実施の形態における車両走行支援装置の表示部に表示される表示例および音声案内される音声例を示す。
【0055】
まず、図3は、複数車線道路において、車両走行支援情報を送信する車両が車両走行支援情報を受信する車両の前方を他の車両と走行中の説明図である。
【0056】
図3において、車両101は、車両走行支援情報を送信する情報送信装置100を搭載した走行支援情報送信車両、車両102は、車両走行支援情報を受信する車両支援装置200を搭載した走行支援情報受信車両、車両104は、車両走行支援装置の非搭載車両で消防車、パトカー、バスなどの特殊公共車両、車両103、105は、車両走行支援装置の非搭載車両で他の一般車両を表わしている。
【0057】
この状態で走行している過程において、車両走行支援装置の非搭載車両103が方向指示器により車線変更を周囲車両に報知し、さらに車両走行支援装置の非搭載車両104がブレーキライトにより車速速度の減速を周囲車両に報知している状況が発生した場合にお
ける、車両走行支援装置の表示部222に表示される平面表示例を図4に、立体表示例を図5に示す。
【0058】
図4、図5において、車両103は、方向指示器131により車線変更の報知を行い、車両104は、ブレーキライト141により車速速度の減速報知を行っている様子を示している。
【0059】
すなわち、車両102の運転者は、自車両に搭載された車両支援装置200の表示部に表示された図4、図5を視認することによって、自車両102と先行する車両の前方に存在する目視できない車両103、104と、先行する車両101と目視できる車両105の走行位置関係および車両103の車線変更報知状況、車両104の速度減速の報知状況を把握することができる。また、「車両103が右に車線変更します」、「車両104が減速します」などの音声案内によって報知状況を把握することができる。
【0060】
報知情報は、以下の表示例についても同様であるが、本実施の形態のように、表示部222への画像表示と併せて音声案内で提示することも出来るが、音声案内のみによる提示であっても、本発明の効果は得られる。
【0061】
また、図6、図7は、本実施の形態における車両走行支援装置の表示部222に表示される他の平面表示例と立体表示例を示す図である。
【0062】
図6、図7において、図4、図5と同じ構成については同一番号を付し説明を省略する。
【0063】
図4、図5との相違点は、車両103の車線変更の報知状況と車両104の速度減速の報知状況がない状態で、車両102の車線変更路121を走行情報として表示部222に重ねて表示したことである。
【0064】
車両102の運転者は、自車両に搭載された車両支援装置200の表示部222に表示された図6、図7を視認することによって自車の車線変更や追い越しを安全に行うことができる。
【0065】
また、「右に車線変更できます」、「追い越しが出来ます」などの音声案内によって安全な進路変更を行うことができる。
【0066】
また、図8は、本実施の形態における車両走行支援装置の表示部222に表示される他の平面表示例を示す図である。
【0067】
図8において、図6と同じ構成については同一番号を付し説明を省略する。
【0068】
図6との相違点は、走行支援情報を送信する車両101は外側の走行車線を走行し、走行支援情報を受信する車両102は、内側の走行車線を走行していることである。
【0069】
この場合も図6と同様に、車両102の運転者は、自車両に搭載された車両支援装置200の表示部222に表示された図8を視認することによって自車の車線変更や追い越しを安全に行うことができる。
【0070】
また、図9は、本実施の形態における車両走行支援装置の表示部222に表示される他の立体表示例である。
【0071】
図9において、車両101は、車両走行支援情報を送信する情報送信装置100を搭載した走行支援情報送信車両、車両102は、車両走行支援情報を受信する車両支援装置200を搭載した走行支援情報受信車両、車両103は、車両走行支援装置の非搭載車両を表わしている。
【0072】
車両101の前方を車両103が比較的接近して走行している状態で、車両101と車両103を重ね合わせて表示し、かつ、前方の車両103は後方の車両101より小さく表示したものである。
【0073】
車両102の運転者は、自車両に搭載された車両支援装置200の表示部222に表示された図9を視認することによって先行する車両の前方に他の車両が存在することを把握することができる。
【0074】
以上の実施の形態では、複数車線走行において、車両走行支援情報を送信する車両101と車両走行支援情報を受信する車両102が1対1で存在し走行する状況について、複数車両の走行位置、各車両の報知情報、および自車両の周囲の複数車両の行方を予測して自車両の安全な追い越し、車線変更等の移動情報を表示する場合について説明したが、本発明は、次のような形態でも同様の効果が得られる。
【0075】
図10は、複数車線道路において、車両走行支援情報を送信する複数の車両が車両走行支援情報を受信する車両の前後左右を走行中の説明図である。
【0076】
図10において、車両101、111、112、113、114、115、116、117は、車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両で、車両102は、車両走行支援情報を受信する車両支援装置を搭載した走行支援情報受信車両である。
【0077】
車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両101、111〜117は、各々の情報送信装置が取得した車両走行支援情報を車両102に送信し、車両102の車両支援装置は、受信した車両走行支援情報をもとに解析処理して、前述と同様に車両支援装置の表示部に平面表示または立体表示を行う。
【0078】
具体的な平面表示例または立体表示例は、前述と同様のため省略する。
【0079】
前後左右を走行する複数の走行支援情報送信車両より車両走行支援情報を受信することによって、車両102の運転手は、より多く且つより詳細な車両走行支援情報を取得できるとともに、自車と周囲車両の走行位置関係がより明確に把握できる。
【0080】
また、図11は、複数車線道路において、車両走行支援情報を送信する車両と車両走行支援情報を受信する車両との間に、車両走行支援情報を中継する中継車両が入った状態の走行中の説明図である。
【0081】
図11において、車両101は、車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両、車両102は、車両走行支援情報を受信する車両支援装置を搭載した走行支援情報受信車両、車両131、132は、車両走行支援情報を中継する中継車両、車両103は、車両走行支援装置の非搭載車両である。
【0082】
車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両101は、車両走行支援情報を中継車両131または中継車両132に一旦送信し、車両走行支援情報を受信した中継車両131または中継車両132は、車両走行支援情報を受信する車両
支援装置を搭載した走行支援情報受信車両102に送信し、走行支援情報受信車両102の車両支援装置は、受信した車両走行支援情報をもとに解析処理して、前述と同様に車両支援装置の表示部に平面表示または立体表示を行う。
【0083】
具体的な平面表示例または立体表示例は、前述と同様のため省略する。
【0084】
中継車両を経由して車両走行支援情報を受信することによって、車両102の運転手は、より前方を走行する他車両の走行位置関係、他車両の報知状況、道路状況など予め把握できる。
【0085】
なお、本実施の形態では、中継車両が横列位置にある場合について説明したが、縦列位置にある複数の中継車両を経由して車両走行支援情報を受信する構成も可能で、このように構成することによってより前方を走行する他車両の走行位置関係、他車両の報知状況、道路状況などがより早期に把握できる。
【0086】
また、図12は、側路に路側装置が施設された複数車線道路において、走行支援情報を受信する車両と他の車両が走行中の説明図である。
【0087】
図12において、車両102は、車両走行支援情報を受信する車両支援装置を搭載した走行支援情報受信車両で、車両103、104、105、106は、車両走行支援装置の非搭載車両で、側路に施設された側路装置140は、走行中の車両の種別や速度などの情報収集と走行中の車両に向けて交通量情報、渋滞情報などの各種の車両走行支援情報を常時発信している。
【0088】
側路装置から発信された車両走行支援情報を受信した車両102の車両支援装置は、受信した車両走行支援情報をもとに解析処理して、前述と同様に車両支援装置の表示部に平面表示または立体表示を行う。
【0089】
具体的な平面表示例または立体表示例は、前述と同様のため省略する。
【0090】
車両走行支援情報を側路装置から受信することによって、車両走行支援情報を受信する車両支援装置を搭載した走行支援情報受信車両は、車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両との併走を必要とせずに前方を走行する車両の走行位置関係、車両の報知状況、道路状況などが把握できる。
【0091】
なお、上述では、片側複数車線道路を直進走行する場合について説明したが、片側一車線道路においても、対向車線を走行する車両の走行位置、右左折などの報知情報を把握でき、車両走行支援装置の表示部に表示できるため安全な追い越し、右左折などが可能となる。
【0092】
さらに、図13は、道路幅の広い道路側にのみ信号の設置された交差点において、車両走行支援情報を送信する車両が車両走行支援情報を受信する車両の前方に停車中の説明図である。
【0093】
図13において、車両201、203は、車両走行支援情報を送信する情報送信装置100を搭載した走行支援情報送信車両、車両202は、車両走行支援情報を受信する車両支援装置200を搭載した走行支援情報受信車両で、車両201は、信号241により停止し方向指示器206により右折することを周囲車両および歩行者に報知を行い、車両203は、方向指示器207により左折することを周囲車両および歩行者に報知を行っている状態である。
【0094】
歩行者221、222は、交差点を横断するために信号待ちしている状態である。信号機241は、交差する道路幅の広い道路側にのみ設置されており、信号が赤から青に変わった直後の状態である。走行支援情報送信車両201からは、車両203、歩行者221の存在を直接確認できるが、走行支援情報受信車両202からは、建物242の死角になり車両203および歩行者221の存在を確認できない。
【0095】
このような状態における車両走行支援装置の表示部222に表示される平面表示例を図14、立体表示例を図15に示す。
【0096】
図14、図15において、車両201は、方向指示器206により右折の報知を行い、車両203は、方向指示器207により左折の報知を行っている様子を示している。さらに、歩行者221、222が交差点の脇に居ることと、信号機241が交差点に設置されておりその信号状況と、建物242が存在することを示している。
【0097】
また、図15においては、建物242を透かして、建物242で死角となっている領域に存在する車両203と歩行者221を表示している。
【0098】
車両202の運転手は、自車両に搭載された車両支援装置200の表示部222に表示された図14、図15の表示を視認することによって、交差点の信号状況と、建物242で死角となっている領域に存在する左折しようとして方向指示器207で報知している車両203と歩行者221と、交差点脇に居る歩行者222を確認でき、運転に注意することができる。また、「次の交差点の右方に、左折する車両があります」、「次の交差点に、歩行者が居ます」などの音声案内によって交差点の状況を把握することができる。
【0099】
なお、本実施の形態の立体表示例では、建物で死角となる領域に存在する車両と歩行者について説明したが、建物以外にトンネル、陸橋などで車両、歩行者が隠れてしまう場合も同様に表示することが可能である。
【0100】
また、図16、図17、図18は、道路幅の広い道路側にのみ信号の設置された交差点付近における、車両走行支援装置の表示部222に表示される他の平面表示例である。
【0101】
図16、図17、図18において、図14と同じ構成に関しては同一番号を付して説明を省略する。
【0102】
図16と図14との相違点は、車両202の直進路251を走行情報として表示部に重ねて表示したことである。
【0103】
車両202の運転手は、自車両に搭載された車両支援装置200の表示部222に表示された図16を視認することによって、前の車両が交差点で右折するため道路の左側によって走行し、且つ左側には歩行者が居ることが把握でき、運転に注意することができる。また、「左側によって走行してください」、「次の交差点の左側に、歩行者が居ます」などの音声案内によって交差点の状況を把握することができる。
【0104】
また、図17と図14との相違点は、車両202の左折路251を走行情報として表示部222に重ねて表示したことである。
【0105】
車両202の運転手は、自車両に搭載された車両支援装置200の表示部222に表示された図17を視認することによって、左折する方向の交差点に歩行者222が居ることが把握でき、運転に注意することができる。また、「歩行者が居ますので注意して左折し
てください」などの音声案内よって交差点の状況を把握することができる。
【0106】
また、図18と図14との相違点は、車両202の右折路251を走行情報として表示部に重ねて表示したことである。
【0107】
車両202の運転手は、自車両に搭載された車両支援装置200の表示部222に表示された図18を視認することによって、建物242で死角となっている領域に左折しようとする車両203と歩行者221が居ることが把握でき、運転に注意することができる。また、「歩行者が居ますので注意して右折してください」などの音声案内によって交差点の状況を把握することができる。
【0108】
また、図19は、道路幅の広い道路側にのみ信号の設置された交差点において、車両走行支援情報を送信する車両と車両走行支援情報を受信する車両との間に、車両走行支援情報を中継する中継車両が入った状態で停車中の説明図である。
【0109】
図19において、図13と同じ構成に関しては同一番号を付して説明を省略する。
【0110】
図13との相違点は、車両走行支援情報を送信する情報送信装置を搭載した走行支援情報送信車両201は、車両走行支援情報を中継車両204に一旦送信し、車両走行支援情報を受信した中継車両204は、車両走行支援情報を受信する車両支援装置を搭載した走行支援情報受信車両202に送信し、走行支援情報受信車両202の車両支援装置は、受信した車両走行支援情報をもとに解析処理して、前述と同様に車両支援装置の表示部に平面表示または立体表示を行う。
【0111】
具体的な平面表示例または立体表示例は、前述と同様のため省略する。
【0112】
中継車両を経由して車両走行支援情報を受信することによって、車両202の運転手は、自車両に搭載された車両支援装置200の表示部222に表示された内容を視認することによって、交差点からより離れた位置にいながら交差点の信号状況と、建物241で死角となっている領域に存在する車両211と歩行者と、交差点脇に居る歩行者221を確認でき、運転に注意することができる。
【0113】
以上のように、本実施の形態の車両走行支援装置によれば、先行する車両の前方や建物で死角となっている領域に存在する複数車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握できる。さらに、これら他車両の移動を予測し、自車の安全な車線変更、追い越し、右左折などの走行情報を表示部に表示または音声で案内するため、本発明の車両走行支援装置を搭載した車両の運転手は、自車の安全な車線変更、追い越し、右左折などが可能となる。
【0114】
なお、本実施の形態の表示例で車両支援装置200の表示部222に表示される方向指示器およびストップライトの形状、色、点滅、点灯、音など、また表示部に表示される自車両、特殊公共車両および一般車両の形状、色、点滅、点灯など、さらに表示部222に表示される車線変更路、直進路および右左折路などの走行情報を示す表示の線種、色、点滅、点灯など、さらに表示部222に表示される信号機や歩行者などの形状、色、点滅、点灯、音などは、表示例に示された内容に限定されることはなく、表示部222を視認する運転手が確認しやすいものであれば何れでもよい。
【産業上の利用可能性】
【0115】
以上のように、本発明にかかる車両走行支援装置は、受信した車両走行支援情報に基づ
いて、自車から目視できない車両の走行位置関係、これら車両の速度減速、車線変更、右左折などの報知状況、道路形状、信号、道路標識や歩行者、自転車を含む道路状況などの情報を正確に把握し、表示部に表示または音声案内するため、車両の安全走行を促す車両走行支援装置として有用である。
【図面の簡単な説明】
【0116】
【図1】本発明の実施の形態1における車両走行支援装置の構成を示すブロック図
【図2】本発明の実施の形態1における車両走行支援装置の動作を示すフローチャート
【図3】本発明の実施の形態1における車両走行支援装置を搭載した車両の走行説明図
【図4】本発明の実施の形態1における車両走行支援装置の表示部に表示される平面表示例を示す図
【図5】本発明の実施の形態1における車両走行支援装置の表示部に表示される立体表示例を示す図
【図6】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図7】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の立体表示例を示す図
【図8】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図9】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の立体表示例を示す図
【図10】本発明の実施の形態1における車両走行支援装置を搭載した車両の他の走行説明図
【図11】本発明の実施の形態1における車両走行支援装置を搭載した車両と中継車両の走行説明図
【図12】本発明の実施の形態1における車両走行支援装置を搭載した車両と路側装置との関係を示す走行説明図
【図13】本発明の実施の形態1における車両走行支援装置を搭載した車両の交差点付近での走行説明図
【図14】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図15】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の立体表示例を示す図
【図16】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図17】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図18】本発明の実施の形態1における車両走行支援装置の表示部に表示される他の平面表示例を示す図
【図19】本発明の実施の形態1における車両走行支援装置を搭載した車両の他の走行説明図
【符号の説明】
【0117】
100 情報送信装置
101 走行支援情報送信車両
102 走行支援情報受信車両
111 走行支援情報取得部
112 車両情報格納部
113,220 現在位置検出部
114,223 制御部
115,211 通信部
200 車両支援装置
212 操作入力部
213 車両位置解析部
214 車両報知解析部
215 車両走行履歴情報蓄積部
216 移動予測部
217 走行情報生成部
218 車両速度検出部
219 地図データ蓄積部
221 スピーカ
222 表示部
【特許請求の範囲】
【請求項1】
車両走行支援情報を外部から受信する受信手段と、前記車両走行支援情報から他車両の走行位置を解析する車両走行位置解析手段と、前記車両走行支援情報から前記他車両の報知状況を解析する車両報知情報解析手段と、前記他車両の走行位置および前記他車両の報知情報を用いて前記他車両の移動を予測する移動予測手段と、前記移動予測手段で予測した前記他車両の移動予測情報を用いて前記自車両の走行情報を生成する走行情報生成手段とを備えたことを特徴とする車両走行支援装置。
【請求項2】
前記車両走行支援情報は、映像、音声、文字、データのうち少なくとも一つであることを特徴とする請求項1に記載の車両走行支援装置。
【請求項3】
前記車両走行支援情報は、前記自車両の情報送信装置、前記他車両の情報送信装置、中継車両、路側装置のうち少なくとも一つから受信することを特徴とする請求項1に記載の車両走行支援装置。
【請求項4】
前記車両報知情報解析手段は、前記他車両の方向指示器およびブレーキライトの点灯状況を解析することを特徴とする請求項1に記載の車両走行支援装置。
【請求項5】
前記走行情報生成手段で生成される前記自車両の走行情報は、前記自車両の車線変更、直進および右左折に関する情報であることを特徴とする請求項1に記載の車両走行支援装置。
【請求項6】
前記走行情報生成手段で生成される前記他車両の走行情報は、前記他車両の方向指示器およびブレーキライトの点灯状況に関する情報であることを特徴とする請求項1に記載の車両走行支援装置。
【請求項7】
前記走行情報生成手段は、車両、トンネル、建物で隠れた前記他車両や歩行者が存在する場合は、これらを合わせた情報を生成することを特徴とする請求項1に記載の車両走行支援装置。
【請求項8】
前記車両走行支援情報を送信する前記情報送信装置は、前記車両走行支援情報を取得する走行支援情報取得手段と、車両の固有情報を格納する車両情報格納手段と、前記情報送信装置を搭載した車両の現在位置を検出する現在位置検出手段とを備えたことを特徴とする請求項3に記載の車両走行支援装置。
【請求項9】
前記車両情報格納手段は、車両寸法に関する情報および車両に設置されたカメラ設置位置に関する情報を格納することを特徴とする請求項8に記載の車両走行支援装置。
【請求項10】
前記他車両の走行位置履歴および前記他車両の報知履歴を蓄積する車両走行履歴情報蓄積手段を更に備え、前記移動予測手段は、前記他車両の走行位置、前記他車両の報知情報および前記他車両の車両走行履歴情報を用いて前記他車両の移動を予測することを特徴とする請求項1に記載の車両走行支援装置。
【請求項11】
前記自車両の現在位置を検出する現在位置検出手段と、前記現在位置検出手段で検出した前記自車両の現在位置に対応する地図データを道路地図として表示する表示手段とを更に備え、前記表示手段は、前記走行情報生成手段で生成された前記自車両の走行情報を表示または音声案内することを特徴とする請求項1に記載の車両走行支援装置。
【請求項1】
車両走行支援情報を外部から受信する受信手段と、前記車両走行支援情報から他車両の走行位置を解析する車両走行位置解析手段と、前記車両走行支援情報から前記他車両の報知状況を解析する車両報知情報解析手段と、前記他車両の走行位置および前記他車両の報知情報を用いて前記他車両の移動を予測する移動予測手段と、前記移動予測手段で予測した前記他車両の移動予測情報を用いて前記自車両の走行情報を生成する走行情報生成手段とを備えたことを特徴とする車両走行支援装置。
【請求項2】
前記車両走行支援情報は、映像、音声、文字、データのうち少なくとも一つであることを特徴とする請求項1に記載の車両走行支援装置。
【請求項3】
前記車両走行支援情報は、前記自車両の情報送信装置、前記他車両の情報送信装置、中継車両、路側装置のうち少なくとも一つから受信することを特徴とする請求項1に記載の車両走行支援装置。
【請求項4】
前記車両報知情報解析手段は、前記他車両の方向指示器およびブレーキライトの点灯状況を解析することを特徴とする請求項1に記載の車両走行支援装置。
【請求項5】
前記走行情報生成手段で生成される前記自車両の走行情報は、前記自車両の車線変更、直進および右左折に関する情報であることを特徴とする請求項1に記載の車両走行支援装置。
【請求項6】
前記走行情報生成手段で生成される前記他車両の走行情報は、前記他車両の方向指示器およびブレーキライトの点灯状況に関する情報であることを特徴とする請求項1に記載の車両走行支援装置。
【請求項7】
前記走行情報生成手段は、車両、トンネル、建物で隠れた前記他車両や歩行者が存在する場合は、これらを合わせた情報を生成することを特徴とする請求項1に記載の車両走行支援装置。
【請求項8】
前記車両走行支援情報を送信する前記情報送信装置は、前記車両走行支援情報を取得する走行支援情報取得手段と、車両の固有情報を格納する車両情報格納手段と、前記情報送信装置を搭載した車両の現在位置を検出する現在位置検出手段とを備えたことを特徴とする請求項3に記載の車両走行支援装置。
【請求項9】
前記車両情報格納手段は、車両寸法に関する情報および車両に設置されたカメラ設置位置に関する情報を格納することを特徴とする請求項8に記載の車両走行支援装置。
【請求項10】
前記他車両の走行位置履歴および前記他車両の報知履歴を蓄積する車両走行履歴情報蓄積手段を更に備え、前記移動予測手段は、前記他車両の走行位置、前記他車両の報知情報および前記他車両の車両走行履歴情報を用いて前記他車両の移動を予測することを特徴とする請求項1に記載の車両走行支援装置。
【請求項11】
前記自車両の現在位置を検出する現在位置検出手段と、前記現在位置検出手段で検出した前記自車両の現在位置に対応する地図データを道路地図として表示する表示手段とを更に備え、前記表示手段は、前記走行情報生成手段で生成された前記自車両の走行情報を表示または音声案内することを特徴とする請求項1に記載の車両走行支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2007−164328(P2007−164328A)
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願番号】特願2005−357410(P2005−357410)
【出願日】平成17年12月12日(2005.12.12)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願日】平成17年12月12日(2005.12.12)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]