
車両走行支援装置
【課題】推奨走行速度を精度良く求めることにより、最適な推奨走行ルートを提示することができる車両走行支援装置を提供する。
【解決手段】車両走行支援装置1では、信号機が青信号から赤信号に切り替わる時間間隔を示す信号機情報と、走行ルート上に存在する車両の速度変化パラメータとの双方に基づいて推奨走行速度を演算している。速度変化パラメータには、車両の方向転換に関するパラメータ、道路形状に関するパラメータ、及び道路規制に関するパラメータが含まれ、車両が走行する際に加減速を生じさせる要因が考慮されている。したがって、加減速が多く発生する走行ルートを走行する場合であっても、推奨走行速度を精度良く求めることができ、最適な推奨走行ルートを提示することが可能となる。
【解決手段】車両走行支援装置1では、信号機が青信号から赤信号に切り替わる時間間隔を示す信号機情報と、走行ルート上に存在する車両の速度変化パラメータとの双方に基づいて推奨走行速度を演算している。速度変化パラメータには、車両の方向転換に関するパラメータ、道路形状に関するパラメータ、及び道路規制に関するパラメータが含まれ、車両が走行する際に加減速を生じさせる要因が考慮されている。したがって、加減速が多く発生する走行ルートを走行する場合であっても、推奨走行速度を精度良く求めることができ、最適な推奨走行ルートを提示することが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両走行支援装置に関する。
【背景技術】
【0002】
車両に搭載される車両走行支援装置として、例えば特許文献1に記載のナビゲーション装置がある。この従来のナビゲーション装置は、信号機ごとの信号情報に基づいて、走行ルート上の信号機を青信号で通過できる最適速度を計算してディスプレイに表示する。また、このナビゲーション装置は、途中の信号機間で最適速度が著しく低下すると判断したときには、走行ルートを迂回路に変更し、当該迂回路を通るルートで信号機を青信号で通過できる最適速度を計算してディスプレイに表示する。
【特許文献1】特開2007−121000号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述した従来のナビゲーション装置では、走行ルート上にある信号機間を一定速度で走行するものと仮定して最適速度の計算が行われている。しかしながら、実際の走行では、交差点の右折と左折とでは通過時間に差異が生じることも多く、道路の勾配などの要因によっても加減速が多く発生して速度の変動が生じる場合がある。
【0004】
本発明は、上記課題の解決のためになされたものであり、推奨走行速度を精度良く求めることにより、最適な推奨走行ルートを提示することができる車両走行支援装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題の解決のため、本発明に係る車両走行支援装置は、車両の現在地から目的地までの推奨走行ルートを提示する車両走行支援装置であって、走行ルート上に存在する信号機の動作に関する信号機情報を格納する信号機情報格納手段と、走行ルート上に存在する車両の速度変化パラメータを格納する速度変化パラメータ格納手段と、信号機情報及び速度変化パラメータに基づいて、青信号の間に信号機を通過可能となる推奨走行速度を演算する走行速度演算手段と、を備えたことを特徴としている。
【0006】
この車両走行支援装置では、信号機が青信号から赤信号に切り替わる時間間隔を示す信号機情報と、走行ルート上に存在する車両の速度変化パラメータとの双方に基づいて推奨走行速度を演算する。したがって、加減速が多く発生する走行ルートを走行する場合であっても、推奨走行速度を精度良く求めることができ、最適な推奨走行ルートを提示することが可能となる。
【0007】
また、速度変化パラメータは、車両の方向転換に関するパラメータを含むことが好ましい。これにより、推奨走行速度の演算を一層精度良く行なうことができる。車両の方向転換に関するパラメータとしては、例えば右折・左折・カーブ路の回数情報などが挙げられる。
【0008】
また、速度変化パラメータは、走行ルートの道路形状に関するパラメータを含むことが好ましい。これにより、推奨走行速度の演算を一層精度良く行なうことができる。走行ルートの道路形状に関するパラメータとしては、例えば道路勾配情報や交差点形状情報などが挙げられる。
【0009】
また、速度変化パラメータは、走行ルートの道路規制に関するパラメータを含むことが好ましい。これにより、推奨走行速度の演算を一層精度良く行なうことができる。走行ルートの道路規制に関するパラメータとしては、例えば一時停止情報などが挙げられる。
【0010】
また、推奨走行速度に基づいて、車両が目的地に到達するまでの所要時間を演算する所要時間演算手段を更に備え、車両の現在地から目的地までの走行ルートが複数存在する場合に、所要時間が最も短い走行ルートを推奨走行ルートとして提示することが好ましい。これにより、精度良く求められた推奨走行速度を用いて、所要時間が最も短い走行ルートを提示できる。
【0011】
また、推奨走行速度に基づいて、車両が目的地に到達するまでの燃料消費量を演算する燃料消費量演算手段を更に備え、車両の現在地から目的地までの走行ルートが複数存在する場合に、燃料消費量が最も小さい走行ルートを推奨走行ルートとして提示することが好ましい。この場合、精度良く求められた推奨走行速度を用いて、燃料消費量が最も小さい走行ルートを提示できる。
【0012】
また、所要時間及び燃料消費量の優先順位の入力を受け付ける入力受付手段を更に備え、所要時間を優先させる場合に所要時間が最も短い走行ルートを推奨走行ルートとして提示し、燃料消費量を優先させる場合に燃料消費量が最も小さい走行ルートを推奨走行ルートとして提示することが好ましい。この場合、ユーザがより重要視する事項に応じて推奨走行ルートを提示できる。
【発明の効果】
【0013】
本発明によれば、推奨走行速度を精度良く求めることにより、最適な推奨走行ルートを提示することができる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照しながら、本発明に係る車両走行支援装置の好適な実施形態について詳細に説明する。
【0015】
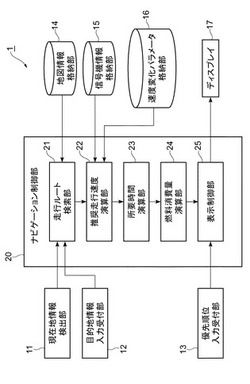
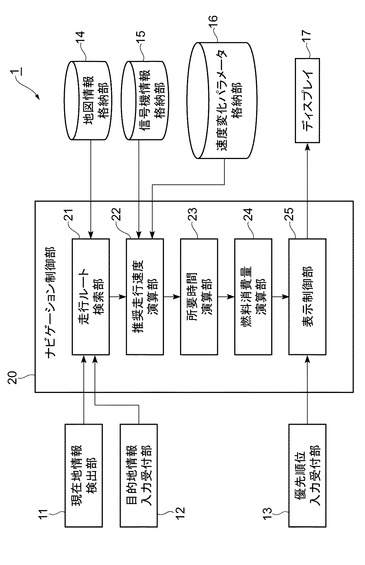
図1は、本発明に係る車両走行支援装置の一実施形態を示すブロック図である。同図に示すように、車両走行支援装置1は、機能的な構成要素として、現在地情報検出部11と、目的地情報入力受付部12と、優先順位入力受付部13と、地図情報格納部14と、信号機情報格納部15と、速度変化パラメータ格納部16と、ディスプレイ17と、ナビゲーション制御部20とを備えている。この車両走行支援装置1は、自動車などの車両に搭載され、当該車両が現在地から目的地に至るまで青信号で走り続けることが可能な走行ルート及びその推奨走行速度をドライバ側に提示する装置として構成されている。
【0016】
現在地情報検出部11は、車両の現在地を検出する部分である。現在地情報の検出には、例えばGPS(Global Positioning System)が用いられる。現在地情報検出部11は、GPS信号に含まれる緯度情報・経度情報・時刻情報を、現在地情報としてナビゲーション制御部20に出力する。目的地情報入力受付部12は、ドライバによる目的地の入力を受け付ける部分である。目的地情報入力受付部12は、入力された目的地の緯度情報・経度情報を目的地情報としてナビゲーション制御部20に出力する。
【0017】
優先順位入力受付部13は、現在地から目的地までの走行ルートが複数存在する場合に、いずれのルートを推奨走行ルートとしてドライバ側に提示するかの判断基準の入力を受け付ける部分である。優先順位入力受付部13は、判断基準として、所要時間優先及び燃料消費量優先のいずれか一方の入力を受け付け、入力された優先順位をナビゲーション制御部20に出力する。
【0018】
地図情報格納部14は、道路を含む地図情報を格納する部分である。地図情報格納部14に格納される地図情報には、例えば道路や交差点の名称情報や、区間ごとの距離情報、建物・店舗・施設情報などが含まれている。また、信号機情報格納部15は、交差点等に設置される信号機の動作に関する信号機情報を格納する部分である。信号機情報には、例えば当該信号機が青信号から黄信号及び赤信号となる周期を示す時刻情報が含まれている。
【0019】
速度変化パラメータ格納部16は、車両の走行速度を変化させる要因となり得る速度変化パラメータを格納する部分である。速度変化パラメータには、主として、車両の方向転換に関するパラメータ、道路形状に関するパラメータ、及び道路規制に関するパラメータが含まれている。各パラメータと車両の走行速度の変化との関係は、場所ごとに予め試験を行い、統計的に処理された値を地図情報と関連付けて格納しておいてもよく、場所ごとの形状から統計的に予測される値として、道路形状の関数で定義して格納しておいてもよい。
【0020】
車両の方向転換に関するパラメータは、例えば右折・左折・カーブ路の回数情報である。右折時と左折時とでは、通過の際の速度変化に相違があり、カーブ路では頻繁に加減速が生じることを考慮したものである。道路形状に関するパラメータは、例えば道路の勾配情報や交差点形状情報である。登坂時及び降坂時の速度変化や、交差点のレーン数・道幅等による速度変化を考慮したものである。また、道路規制に関するパラメータは、例えば法定速度、天候などによる速度規制、一時停止などの指示情報である。
【0021】
次に、ナビゲーション制御部20について説明する。ナビゲーション制御部20は、図1に示すように、走行ルート検索部21と、推奨走行速度演算部22と、所要時間演算部23と、燃料消費量演算部24と、表示制御部25とを有している。
【0022】
走行ルート検索部21は、車両の現在地から目的地までの走行ルートを検索する部分である。走行ルート検索部21は、現在地情報検出部11から出力された現在地情報と、目的地情報入力受付部12から出力された目的地情報とを受け取ると、車両の現在地から目的地までを網羅する地図情報を地図情報格納部14から取得して走行ルートの候補を得る。走行ルートの検索数や、高速道路の使用の有無といった詳細な検索条件は、予め設定された条件が適宜用いられる。
【0023】
推奨走行速度演算部22は、信号機情報及び速度変化パラメータに基づいて、青信号の間に信号機を通過可能となる推奨走行速度を演算する部分である。より具体的には、推奨走行速度演算部22は、例えば信号機のある交差点間の距離と、信号機が青信号となる時刻とに基づいて、青信号の間に信号機を通過できるように走行ルートの各区間の走行速度を算出する。このとき、推奨走行速度演算部22は、走行ルート上に速度変化パラメータが存在する場合には、各パラメータに応じて走行速度に一定の増減を加味し、最終的な推奨走行速度を算出する。
【0024】
推奨走行速度演算部22は、例えば車両が方向転換(右折・左折・カーブ)を行う場合には、算出した走行速度から所定の減算を行って推奨走行速度を算出する。また、例えば道路勾配が上り(下り)勾配である場合には、算出した走行速度から所定の減算(加算)を行って推奨走行速度を算出する。その他、走行ルート上に道路規制がある場合には、算出した走行速度から所定の減算を行って推奨走行速度を算出する。
【0025】
所要時間演算部23は、算出された推奨走行速度に基づいて、車両が目的地に到達するまでの所要時間を演算する部分である。また、燃料消費量演算部24は、算出された推奨走行速度に基づいて、車両が目的地に到達するまでの燃料消費量を演算する部分である。推奨走行速度を用いて所要時間演算部23及び燃料消費量演算部24で作成される青信号通過マップ及び燃料消費量マップについての詳細は後述する。
【0026】
表示制御部25は、ナビゲーション制御部20で算出された走行ルート及び走行速度を表示する部分である。表示制御部25は、走行ルート検索部21で検索された走行ルートが複数存在する場合には、優先順位入力受付部13に入力された優先順位を参照し、所要時間を優先させる場合には所要時間が最も短い走行ルートを推奨走行ルートとして提示し、燃料消費量を優先させる場合には燃料消費量が最も小さい走行ルートを推奨走行ルートとしてディスプレイ17に表示する。また、表示制御部25は、車両が推奨走行ルートに沿って走行する際に、その推奨走行速度を合わせて表示する。
【0027】
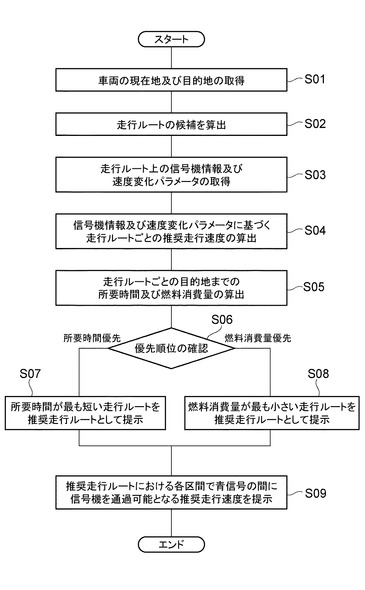
続いて、上述した構成を有する車両走行支援装置1の動作について、図2を参照しながら説明する。図2は、車両走行支援装置1の動作を示すフローチャートである。
【0028】
推奨走行ルートの提示にあたり、まず、車両走行支援装置1は、現在地情報検出部11と目的地情報入力受付部12によって現在地情報と目的地情報とを取得する(ステップS01)。次に、取得した現在地情報と目的地情報とに基づいて、現在地から目的地までを網羅する地図情報を地図情報格納部14から取得し、走行ルートの候補を算出する(ステップS02)。
【0029】
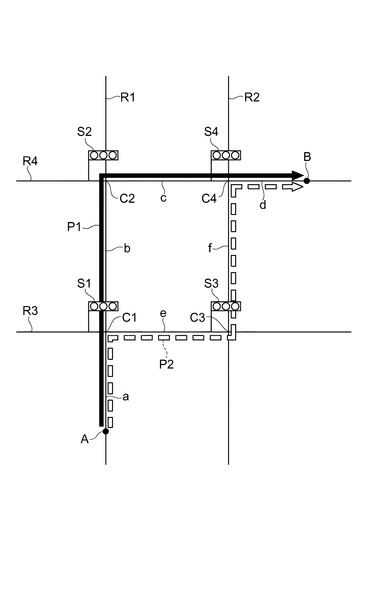
図3は、走行ルートの一例を示す図である。図3に示す例では、同図の上方を北とし、下方を南とした場合に、南北に伸びる2本の道路R1,R2と、東西に伸びる2本の道路R3,R4が升目状に配置されている。道路R1と道路R3が交わる南西の交差点C1、道路R1と道路R4が交わる北西の交差点C2、道路R2と道路R3が交わる南東の交差点C3、道路R2と道路R4とが交わる北東の交差点C4には、それぞれ信号機S1〜S4が設置されている。
【0030】
ここでは、道路R1の南側に車両の現在地Aが設定され、道路R4の東側に目的地Bが設定されている。したがって、ステップS02で算出される走行ルートの候補は、現在地Aから交差点C1,C2,C4を経由して目的地Bに至る走行ルートP1と、現在地から交差点C1,C3,C4を経由して目的地Bに至る走行ルートP2との2本となる。
【0031】
次に、車両走行支援装置1は、算出した走行ルート上の信号機情報を信号機情報格納部15から取得すると共に、同走行ルート上に存在する速度変化パラメータを速度変化パラメータ格納部16から取得する(ステップS03)。そして、車両走行支援装置1は、取得した信号機情報と速度変化パラメータに基づいて、青信号の間に信号機を通過可能となる推奨走行速度を走行ルートごとに算出する(ステップS04)。
【0032】
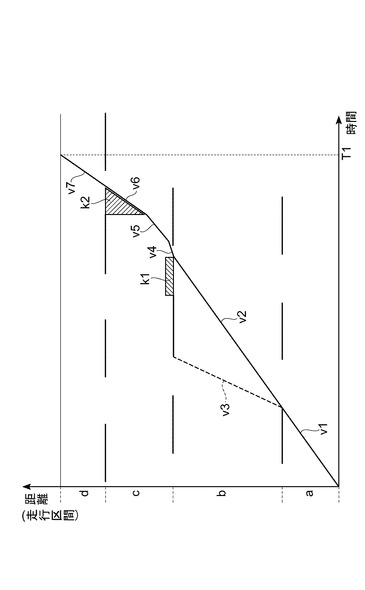
図4は、図3に示した走行ルートP1における青信号通過マップの一例を示した図である。同図において、横軸は時間、縦軸は距離(走行区間)となっている。また、走行ルートP1に存在する信号機S1,S2,S4が黄信号又は赤信号となる時間帯を、マップ上に横線で表示している。
【0033】
図4に示す青信号通過マップにおいて、現在地Aから交差点C1までの区間aでは、信号機S1が赤信号から青信号に切り替わるタイミングで交差点C1を通過できる走行速度v1が算出されている。次の交差点C2では右折となるため、対向車が交差点C2を通過することが予想される時間帯を示す遮断領域K1により、交差点C2を通過できない時間帯が拡張されている。
【0034】
そのため、交差点C1から交差点C2までの区間bでは、遮断領域K1が終了した直後に交差点C2を通過できる走行速度v2(=v1)が算出されている。遮断領域K1は、例えば対向車の位置と速度をプローブや車車間通信によって取得し、対向車が交差点C2に進入する時刻を予測することによって算出される。
【0035】
なお、区間bでは、信号機S2が青信号から黄信号に切り替わる前に交差点C2を通過できる走行速度v3も算出されるが、当該走行速度v3が法定速度を超える場合には案内を行わない。また、交差点C2では右折を行うので、交差点C2を通過する際の走行速度v4は、区間bの走行速度v2よりも減速し、また、加速度の変化を考慮して傾きが徐々に変化している。
【0036】
次の交差点C4では、車両の混雑による遮断領域K2により、交差点C4を通過できない時間帯が拡張されている。この遮断領域K2は、交差点C4において前方に赤信号で停車している車両の台数を検出し、信号機S4が赤信号から青信号に切り替わったときの各車両の発進の伝播速度(発進波)を考慮して算出される。
【0037】
遮断領域K2は、青信号通過マップにおいて、赤信号で停止している車両の台数を示す縦軸方向の辺と、これらの車両が交差点C4を通過し終えるまでの時間を示す横軸方向の辺とによって形成される直角三角形状の領域で示され、交差点C2から交差点C4までの区間cでは、遮断領域K2と重ならないように走行速度v5が算出された後、区間cの途中から信号機S4が青信号となっている間に交差点C4を通過できる走行速度v6(>v5)が算出されている。交差点C4から目的地Bまでの区間dでは、走行速度v6と等速の走行速度v7が算出されている。
【0038】
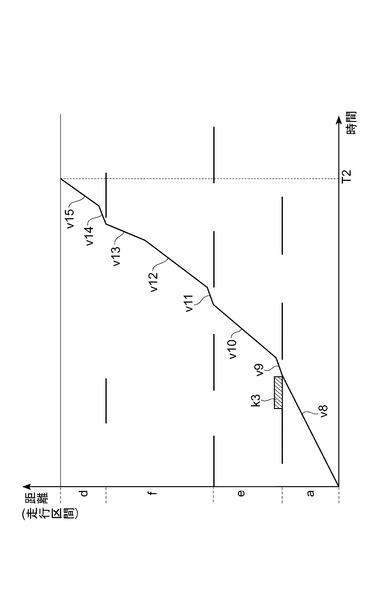
一方、図5は、図3に示した走行ルートP2における青信号通過マップの一例を示した図である。同図において、横軸は時間、縦軸は距離(走行区間)となっている。また、走行ルートP2に存在する信号機S1,S3,S4が黄信号又は赤信号となる時間帯を、マップ上に横線で表示している。
【0039】
図5に示す青信号通過マップでは、始めの交差点C1において右折を行うため、遮断領域K1と同等の遮断領域K3により、交差点C1を通過できない時間帯が拡張されている。そのため、現在地Aから交差点C1までの区間aでは、遮断領域K3が終了した直後に交差点C1を通過できる走行速度v8が算出されている。交差点C1を通過する際の走行速度v9は、右折であることを考慮し、区間aの走行速度v8よりも減速し、また、加速度の変化を考慮して傾きが徐々に変化している。
【0040】
交差点C1から交差点C3までの区間eでは、信号機S3が青信号の間に交差点C3を通過でき、かつ法定速度を超えない走行速度v10が算出されている。交差点C3を通過する際の走行速度v11は、左折であることを考慮し、区間eの走行速度v10よりも減速し、また、加速度の変化を考慮して傾きが徐々に変化している。
【0041】
交差点C3から交差点C4までの区間fの前半部分では、走行速度v12が算出されている。この区間fでは、途中から下り勾配となるような道路勾配が考慮されている。したがって、区間fの後半部分では、下り勾配による自然加速が法定速度を超えない範囲で走行速度v12に加味された走行速度v13が算出されている。
【0042】
交差点C4を通過する際の走行速度v14は、右折であることを考慮して、交差点C1を通過する際の走行速度v9と同様となっている。交差点C4から目的地Bまでの区間dは、例えば法定速度と等速の走行速度v15が算出されている。
【0043】
次に、車両走行支援装置1は、ステップS04で算出した推奨走行速度に基づいて、走行ルートごとの目的地までの所要時間及び燃料消費量を算出する(ステップS05)。所要時間の算出は、上述した青信号通過マップに基づいて行われる。図4及び図5に示した例では、走行速度v1〜v7で見積もられる走行ルートP1の所要時間をT1とし、走行速度v8〜v15で見積もられる走行ルートP2の所要時間をT2とすると、T1>T2となっている。
【0044】
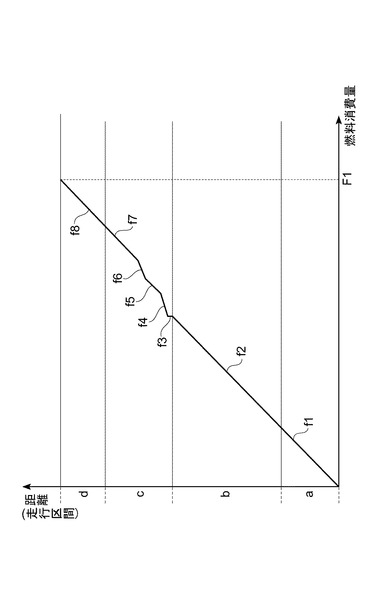
ここで、図6は、図3に示した走行ルートP1における燃料消費量マップの一例を示した図である。同図において、横軸は燃料消費量、縦軸は距離(走行区間)となっている。この燃料消費量マップにおいて、現在地Aから交差点C1までの区間a、及び交差点C1から交差点C2までの区間bでは、走行速度v1と走行速度v2とが一定となっているので、区間aにおける燃料消費率f1と区間bにおける燃料消費率f2は、一定値となっている。
【0045】
交差点C2を通過する際、右折時にブレーキングが発生することを考慮し、ブレーキを踏んでいる間に進む距離については、実質的に燃料消費のない部分f3が算出されている。その後、右折後の加速を考慮して、走行速度v4に対応する部分では、燃料消費率f1,f2よりも大きい(燃費の悪い)燃料消費率f4が算出されている。
【0046】
交差点C2から交差点C4までの区間cでは、走行速度v5に対応する燃料消費率f5が算出されている。その後、走行速度v5が走行速度v6に移行する際の加速を考慮して、燃料消費率f5よりも大きい燃料消費率f6が算出され、走行速度v6に移行後は、交差点C4を通過するまで燃料消費率f6よりも小さい燃料消費率f7が算出されている。交差点C4から目的地Bまでの区間dでは、走行速度v7に対応する燃料消費率f8が算出されている。
【0047】
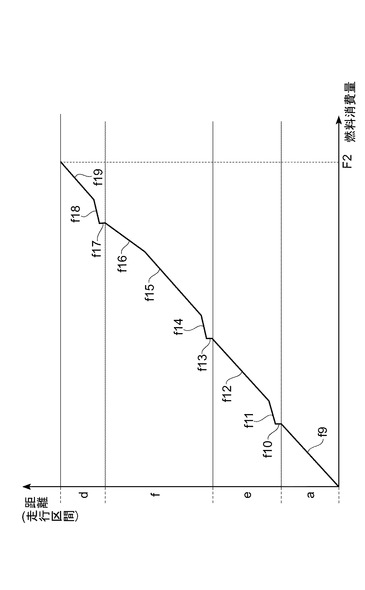
また、図7は、図3に示した走行ルートP2における燃料消費量マップの一例を示した図である。同図において、横軸は燃料消費量、縦軸は距離(走行区間)となっている。この燃料消費量マップにおいて、現在地Aから交差点C1までの区間aでは、走行速度v8に対応する燃料消費率f9は、一定値となっている。
【0048】
交差点C1を通過する際、右折時にブレーキングが発生することを考慮し、ブレーキを踏んでいる間に進む距離については、実質的に燃料消費のない部分f10が算出されている。その後、右折後の加速を考慮して、走行速度v9に対応する部分では、燃料消費率f9よりも大きい燃料消費率f11が算出されている。
【0049】
交差点C1から交差点C3までの区間eでは、走行速度v10に対応する燃料消費率f12が算出されている。交差点C3での左折では、交差点C1の右折の場合と同様に、ブレーキを踏んでいる間に進む距離について実質的に燃料消費のない部分f13が算出され、その後の加速を考慮して、走行速度v11に対応する部分では、燃料消費率f12よりも大きい燃料消費率f14が算出されている。
【0050】
交差点C3から交差点C4までの区間fでは、前半部分は走行速度v12に対応する燃料消費率f15が算出されている。また、後半部分では、下り勾配による自然加速が加味された走行速度v13を考慮して、燃料消費率f15よりも小さい燃料消費率f16が算出されている。
【0051】
交差点C4を通過する際、右折時に再びブレーキングが発生することを考慮し、ブレーキを踏んでいる間に進む距離については、実質的に燃料消費のない部分f17が算出されている。その後、右折後の加速を考慮して、走行速度v14に対応する部分では、燃料消費率f9よりも大きい燃料消費率f18が算出されている。交差点Cから目的地Bまでの区間dでは、走行速度v15に対応する燃料消費率f19が算出されている。
【0052】
図4及び図5に示した例では、燃料消費率f1〜f8で見積もられる走行ルートP1の燃料消費量をF1とし、燃料消費量f9〜f19で見積もられる走行ルートP2の所要時間をF2とすると、F2>F1となっている。
【0053】
走行ルートごとの目的地までの所要時間及び燃料消費量を算出した後、車両走行支援装置1は、優先順位入力受付部13に入力された優先順位の確認を行う(ステップS06)。そして、車両走行支援装置1は、入力された優先順位が所要時間である場合には、所要時間が最も短い走行ルートを推奨走行ルートとして提示し、入力された優先順位が燃料消費量である場合には、燃料消費量が最も小さい走行ルートを推奨走行ルートとして提示する。
【0054】
図4〜図7の例では、車両走行支援装置1は、所要時間が優先である場合には、目的地Bまでの所要時間が短い走行ルートP2を推奨走行ルートとしてディスプレイ17に表示し、燃料消費量が優先である場合には、目的地Bまでの燃料消費量が小さい走行ルートP1を推奨走行ルートとしてディスプレイ17に表示する。
【0055】
そして、車両走行支援装置1は、表示した推奨走行ルートの青信号通過マップに基づいて、推奨走行ルートの各区間で青信号の間に信号機を通過可能となる推奨走行速度をディスプレイ17に順次表示する(ステップS07)。車両が目的地に到達すると、車両走行支援装置1の処理が終了する。
【0056】
以上説明したように、車両走行支援装置1では、信号機が青信号から赤信号に切り替わる時間間隔を示す信号機情報と、走行ルート上に存在する車両の速度変化パラメータとの双方に基づいて推奨走行速度を演算している。速度変化パラメータには、車両の方向転換に関するパラメータ、道路形状に関するパラメータ、及び道路規制に関するパラメータが含まれ、車両が走行する際に加減速を生じさせる要因が考慮されている。したがって、加減速が多く発生する走行ルートを走行する場合であっても、推奨走行速度を精度良く求めることができ、最適な推奨走行ルートを提示することが可能となる。
【0057】
また、車両走行支援装置1では、所要時間及び燃料消費量の優先順位の入力を受け付け、所要時間を優先させる場合に所要時間が最も短い走行ルートを推奨走行ルートとして提示し、燃料消費量を優先させる場合に燃料消費量が最も小さい走行ルートを推奨走行ルートとして提示する。したがって、ユーザがより重要視する事項に応じて推奨走行ルートを提示できる。ドライバにとって、所要時間を優先する場合には時間の節約となり、燃料消費量を優先する場合には燃料の節約となり、燃費も向上する。また、無駄な加減速が少なくなることで、車両走行時の快適性も保たれる。
【図面の簡単な説明】
【0058】
【図1】本発明に係る車両走行支援装置の一実施形態を示すブロック図である。
【図2】図1に示した車両走行支援装置の動作を示すフローチャートである。
【図3】車両の現在地から目的地に至る走行ルートの候補の一例を示す図である。
【図4】一方の走行ルートにおける青信号通過マップの一例を示す図である。
【図5】他方の走行ルートにおける青信号通過マップの一例を示す図である。
【図6】一方の走行ルートにおける燃料消費量マップの一例を示す図である。
【図7】他方の走行ルートにおける燃料消費量マップの一例を示す図である。
【符号の説明】
【0059】
1…車両走行支援装置、13…優先順位受付部、15…信号機情報格納部、16…速度変化パラメータ格納部、22…推奨走行速度演算部、23…所要時間演算部、24…燃料消費量演算部、A…現在地、B…目的地、S1〜S4…信号機、P1,P2…走行ルート。
【技術分野】
【0001】
本発明は、車両走行支援装置に関する。
【背景技術】
【0002】
車両に搭載される車両走行支援装置として、例えば特許文献1に記載のナビゲーション装置がある。この従来のナビゲーション装置は、信号機ごとの信号情報に基づいて、走行ルート上の信号機を青信号で通過できる最適速度を計算してディスプレイに表示する。また、このナビゲーション装置は、途中の信号機間で最適速度が著しく低下すると判断したときには、走行ルートを迂回路に変更し、当該迂回路を通るルートで信号機を青信号で通過できる最適速度を計算してディスプレイに表示する。
【特許文献1】特開2007−121000号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
上述した従来のナビゲーション装置では、走行ルート上にある信号機間を一定速度で走行するものと仮定して最適速度の計算が行われている。しかしながら、実際の走行では、交差点の右折と左折とでは通過時間に差異が生じることも多く、道路の勾配などの要因によっても加減速が多く発生して速度の変動が生じる場合がある。
【0004】
本発明は、上記課題の解決のためになされたものであり、推奨走行速度を精度良く求めることにより、最適な推奨走行ルートを提示することができる車両走行支援装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題の解決のため、本発明に係る車両走行支援装置は、車両の現在地から目的地までの推奨走行ルートを提示する車両走行支援装置であって、走行ルート上に存在する信号機の動作に関する信号機情報を格納する信号機情報格納手段と、走行ルート上に存在する車両の速度変化パラメータを格納する速度変化パラメータ格納手段と、信号機情報及び速度変化パラメータに基づいて、青信号の間に信号機を通過可能となる推奨走行速度を演算する走行速度演算手段と、を備えたことを特徴としている。
【0006】
この車両走行支援装置では、信号機が青信号から赤信号に切り替わる時間間隔を示す信号機情報と、走行ルート上に存在する車両の速度変化パラメータとの双方に基づいて推奨走行速度を演算する。したがって、加減速が多く発生する走行ルートを走行する場合であっても、推奨走行速度を精度良く求めることができ、最適な推奨走行ルートを提示することが可能となる。
【0007】
また、速度変化パラメータは、車両の方向転換に関するパラメータを含むことが好ましい。これにより、推奨走行速度の演算を一層精度良く行なうことができる。車両の方向転換に関するパラメータとしては、例えば右折・左折・カーブ路の回数情報などが挙げられる。
【0008】
また、速度変化パラメータは、走行ルートの道路形状に関するパラメータを含むことが好ましい。これにより、推奨走行速度の演算を一層精度良く行なうことができる。走行ルートの道路形状に関するパラメータとしては、例えば道路勾配情報や交差点形状情報などが挙げられる。
【0009】
また、速度変化パラメータは、走行ルートの道路規制に関するパラメータを含むことが好ましい。これにより、推奨走行速度の演算を一層精度良く行なうことができる。走行ルートの道路規制に関するパラメータとしては、例えば一時停止情報などが挙げられる。
【0010】
また、推奨走行速度に基づいて、車両が目的地に到達するまでの所要時間を演算する所要時間演算手段を更に備え、車両の現在地から目的地までの走行ルートが複数存在する場合に、所要時間が最も短い走行ルートを推奨走行ルートとして提示することが好ましい。これにより、精度良く求められた推奨走行速度を用いて、所要時間が最も短い走行ルートを提示できる。
【0011】
また、推奨走行速度に基づいて、車両が目的地に到達するまでの燃料消費量を演算する燃料消費量演算手段を更に備え、車両の現在地から目的地までの走行ルートが複数存在する場合に、燃料消費量が最も小さい走行ルートを推奨走行ルートとして提示することが好ましい。この場合、精度良く求められた推奨走行速度を用いて、燃料消費量が最も小さい走行ルートを提示できる。
【0012】
また、所要時間及び燃料消費量の優先順位の入力を受け付ける入力受付手段を更に備え、所要時間を優先させる場合に所要時間が最も短い走行ルートを推奨走行ルートとして提示し、燃料消費量を優先させる場合に燃料消費量が最も小さい走行ルートを推奨走行ルートとして提示することが好ましい。この場合、ユーザがより重要視する事項に応じて推奨走行ルートを提示できる。
【発明の効果】
【0013】
本発明によれば、推奨走行速度を精度良く求めることにより、最適な推奨走行ルートを提示することができる。
【発明を実施するための最良の形態】
【0014】
以下、図面を参照しながら、本発明に係る車両走行支援装置の好適な実施形態について詳細に説明する。
【0015】
図1は、本発明に係る車両走行支援装置の一実施形態を示すブロック図である。同図に示すように、車両走行支援装置1は、機能的な構成要素として、現在地情報検出部11と、目的地情報入力受付部12と、優先順位入力受付部13と、地図情報格納部14と、信号機情報格納部15と、速度変化パラメータ格納部16と、ディスプレイ17と、ナビゲーション制御部20とを備えている。この車両走行支援装置1は、自動車などの車両に搭載され、当該車両が現在地から目的地に至るまで青信号で走り続けることが可能な走行ルート及びその推奨走行速度をドライバ側に提示する装置として構成されている。
【0016】
現在地情報検出部11は、車両の現在地を検出する部分である。現在地情報の検出には、例えばGPS(Global Positioning System)が用いられる。現在地情報検出部11は、GPS信号に含まれる緯度情報・経度情報・時刻情報を、現在地情報としてナビゲーション制御部20に出力する。目的地情報入力受付部12は、ドライバによる目的地の入力を受け付ける部分である。目的地情報入力受付部12は、入力された目的地の緯度情報・経度情報を目的地情報としてナビゲーション制御部20に出力する。
【0017】
優先順位入力受付部13は、現在地から目的地までの走行ルートが複数存在する場合に、いずれのルートを推奨走行ルートとしてドライバ側に提示するかの判断基準の入力を受け付ける部分である。優先順位入力受付部13は、判断基準として、所要時間優先及び燃料消費量優先のいずれか一方の入力を受け付け、入力された優先順位をナビゲーション制御部20に出力する。
【0018】
地図情報格納部14は、道路を含む地図情報を格納する部分である。地図情報格納部14に格納される地図情報には、例えば道路や交差点の名称情報や、区間ごとの距離情報、建物・店舗・施設情報などが含まれている。また、信号機情報格納部15は、交差点等に設置される信号機の動作に関する信号機情報を格納する部分である。信号機情報には、例えば当該信号機が青信号から黄信号及び赤信号となる周期を示す時刻情報が含まれている。
【0019】
速度変化パラメータ格納部16は、車両の走行速度を変化させる要因となり得る速度変化パラメータを格納する部分である。速度変化パラメータには、主として、車両の方向転換に関するパラメータ、道路形状に関するパラメータ、及び道路規制に関するパラメータが含まれている。各パラメータと車両の走行速度の変化との関係は、場所ごとに予め試験を行い、統計的に処理された値を地図情報と関連付けて格納しておいてもよく、場所ごとの形状から統計的に予測される値として、道路形状の関数で定義して格納しておいてもよい。
【0020】
車両の方向転換に関するパラメータは、例えば右折・左折・カーブ路の回数情報である。右折時と左折時とでは、通過の際の速度変化に相違があり、カーブ路では頻繁に加減速が生じることを考慮したものである。道路形状に関するパラメータは、例えば道路の勾配情報や交差点形状情報である。登坂時及び降坂時の速度変化や、交差点のレーン数・道幅等による速度変化を考慮したものである。また、道路規制に関するパラメータは、例えば法定速度、天候などによる速度規制、一時停止などの指示情報である。
【0021】
次に、ナビゲーション制御部20について説明する。ナビゲーション制御部20は、図1に示すように、走行ルート検索部21と、推奨走行速度演算部22と、所要時間演算部23と、燃料消費量演算部24と、表示制御部25とを有している。
【0022】
走行ルート検索部21は、車両の現在地から目的地までの走行ルートを検索する部分である。走行ルート検索部21は、現在地情報検出部11から出力された現在地情報と、目的地情報入力受付部12から出力された目的地情報とを受け取ると、車両の現在地から目的地までを網羅する地図情報を地図情報格納部14から取得して走行ルートの候補を得る。走行ルートの検索数や、高速道路の使用の有無といった詳細な検索条件は、予め設定された条件が適宜用いられる。
【0023】
推奨走行速度演算部22は、信号機情報及び速度変化パラメータに基づいて、青信号の間に信号機を通過可能となる推奨走行速度を演算する部分である。より具体的には、推奨走行速度演算部22は、例えば信号機のある交差点間の距離と、信号機が青信号となる時刻とに基づいて、青信号の間に信号機を通過できるように走行ルートの各区間の走行速度を算出する。このとき、推奨走行速度演算部22は、走行ルート上に速度変化パラメータが存在する場合には、各パラメータに応じて走行速度に一定の増減を加味し、最終的な推奨走行速度を算出する。
【0024】
推奨走行速度演算部22は、例えば車両が方向転換(右折・左折・カーブ)を行う場合には、算出した走行速度から所定の減算を行って推奨走行速度を算出する。また、例えば道路勾配が上り(下り)勾配である場合には、算出した走行速度から所定の減算(加算)を行って推奨走行速度を算出する。その他、走行ルート上に道路規制がある場合には、算出した走行速度から所定の減算を行って推奨走行速度を算出する。
【0025】
所要時間演算部23は、算出された推奨走行速度に基づいて、車両が目的地に到達するまでの所要時間を演算する部分である。また、燃料消費量演算部24は、算出された推奨走行速度に基づいて、車両が目的地に到達するまでの燃料消費量を演算する部分である。推奨走行速度を用いて所要時間演算部23及び燃料消費量演算部24で作成される青信号通過マップ及び燃料消費量マップについての詳細は後述する。
【0026】
表示制御部25は、ナビゲーション制御部20で算出された走行ルート及び走行速度を表示する部分である。表示制御部25は、走行ルート検索部21で検索された走行ルートが複数存在する場合には、優先順位入力受付部13に入力された優先順位を参照し、所要時間を優先させる場合には所要時間が最も短い走行ルートを推奨走行ルートとして提示し、燃料消費量を優先させる場合には燃料消費量が最も小さい走行ルートを推奨走行ルートとしてディスプレイ17に表示する。また、表示制御部25は、車両が推奨走行ルートに沿って走行する際に、その推奨走行速度を合わせて表示する。
【0027】
続いて、上述した構成を有する車両走行支援装置1の動作について、図2を参照しながら説明する。図2は、車両走行支援装置1の動作を示すフローチャートである。
【0028】
推奨走行ルートの提示にあたり、まず、車両走行支援装置1は、現在地情報検出部11と目的地情報入力受付部12によって現在地情報と目的地情報とを取得する(ステップS01)。次に、取得した現在地情報と目的地情報とに基づいて、現在地から目的地までを網羅する地図情報を地図情報格納部14から取得し、走行ルートの候補を算出する(ステップS02)。
【0029】
図3は、走行ルートの一例を示す図である。図3に示す例では、同図の上方を北とし、下方を南とした場合に、南北に伸びる2本の道路R1,R2と、東西に伸びる2本の道路R3,R4が升目状に配置されている。道路R1と道路R3が交わる南西の交差点C1、道路R1と道路R4が交わる北西の交差点C2、道路R2と道路R3が交わる南東の交差点C3、道路R2と道路R4とが交わる北東の交差点C4には、それぞれ信号機S1〜S4が設置されている。
【0030】
ここでは、道路R1の南側に車両の現在地Aが設定され、道路R4の東側に目的地Bが設定されている。したがって、ステップS02で算出される走行ルートの候補は、現在地Aから交差点C1,C2,C4を経由して目的地Bに至る走行ルートP1と、現在地から交差点C1,C3,C4を経由して目的地Bに至る走行ルートP2との2本となる。
【0031】
次に、車両走行支援装置1は、算出した走行ルート上の信号機情報を信号機情報格納部15から取得すると共に、同走行ルート上に存在する速度変化パラメータを速度変化パラメータ格納部16から取得する(ステップS03)。そして、車両走行支援装置1は、取得した信号機情報と速度変化パラメータに基づいて、青信号の間に信号機を通過可能となる推奨走行速度を走行ルートごとに算出する(ステップS04)。
【0032】
図4は、図3に示した走行ルートP1における青信号通過マップの一例を示した図である。同図において、横軸は時間、縦軸は距離(走行区間)となっている。また、走行ルートP1に存在する信号機S1,S2,S4が黄信号又は赤信号となる時間帯を、マップ上に横線で表示している。
【0033】
図4に示す青信号通過マップにおいて、現在地Aから交差点C1までの区間aでは、信号機S1が赤信号から青信号に切り替わるタイミングで交差点C1を通過できる走行速度v1が算出されている。次の交差点C2では右折となるため、対向車が交差点C2を通過することが予想される時間帯を示す遮断領域K1により、交差点C2を通過できない時間帯が拡張されている。
【0034】
そのため、交差点C1から交差点C2までの区間bでは、遮断領域K1が終了した直後に交差点C2を通過できる走行速度v2(=v1)が算出されている。遮断領域K1は、例えば対向車の位置と速度をプローブや車車間通信によって取得し、対向車が交差点C2に進入する時刻を予測することによって算出される。
【0035】
なお、区間bでは、信号機S2が青信号から黄信号に切り替わる前に交差点C2を通過できる走行速度v3も算出されるが、当該走行速度v3が法定速度を超える場合には案内を行わない。また、交差点C2では右折を行うので、交差点C2を通過する際の走行速度v4は、区間bの走行速度v2よりも減速し、また、加速度の変化を考慮して傾きが徐々に変化している。
【0036】
次の交差点C4では、車両の混雑による遮断領域K2により、交差点C4を通過できない時間帯が拡張されている。この遮断領域K2は、交差点C4において前方に赤信号で停車している車両の台数を検出し、信号機S4が赤信号から青信号に切り替わったときの各車両の発進の伝播速度(発進波)を考慮して算出される。
【0037】
遮断領域K2は、青信号通過マップにおいて、赤信号で停止している車両の台数を示す縦軸方向の辺と、これらの車両が交差点C4を通過し終えるまでの時間を示す横軸方向の辺とによって形成される直角三角形状の領域で示され、交差点C2から交差点C4までの区間cでは、遮断領域K2と重ならないように走行速度v5が算出された後、区間cの途中から信号機S4が青信号となっている間に交差点C4を通過できる走行速度v6(>v5)が算出されている。交差点C4から目的地Bまでの区間dでは、走行速度v6と等速の走行速度v7が算出されている。
【0038】
一方、図5は、図3に示した走行ルートP2における青信号通過マップの一例を示した図である。同図において、横軸は時間、縦軸は距離(走行区間)となっている。また、走行ルートP2に存在する信号機S1,S3,S4が黄信号又は赤信号となる時間帯を、マップ上に横線で表示している。
【0039】
図5に示す青信号通過マップでは、始めの交差点C1において右折を行うため、遮断領域K1と同等の遮断領域K3により、交差点C1を通過できない時間帯が拡張されている。そのため、現在地Aから交差点C1までの区間aでは、遮断領域K3が終了した直後に交差点C1を通過できる走行速度v8が算出されている。交差点C1を通過する際の走行速度v9は、右折であることを考慮し、区間aの走行速度v8よりも減速し、また、加速度の変化を考慮して傾きが徐々に変化している。
【0040】
交差点C1から交差点C3までの区間eでは、信号機S3が青信号の間に交差点C3を通過でき、かつ法定速度を超えない走行速度v10が算出されている。交差点C3を通過する際の走行速度v11は、左折であることを考慮し、区間eの走行速度v10よりも減速し、また、加速度の変化を考慮して傾きが徐々に変化している。
【0041】
交差点C3から交差点C4までの区間fの前半部分では、走行速度v12が算出されている。この区間fでは、途中から下り勾配となるような道路勾配が考慮されている。したがって、区間fの後半部分では、下り勾配による自然加速が法定速度を超えない範囲で走行速度v12に加味された走行速度v13が算出されている。
【0042】
交差点C4を通過する際の走行速度v14は、右折であることを考慮して、交差点C1を通過する際の走行速度v9と同様となっている。交差点C4から目的地Bまでの区間dは、例えば法定速度と等速の走行速度v15が算出されている。
【0043】
次に、車両走行支援装置1は、ステップS04で算出した推奨走行速度に基づいて、走行ルートごとの目的地までの所要時間及び燃料消費量を算出する(ステップS05)。所要時間の算出は、上述した青信号通過マップに基づいて行われる。図4及び図5に示した例では、走行速度v1〜v7で見積もられる走行ルートP1の所要時間をT1とし、走行速度v8〜v15で見積もられる走行ルートP2の所要時間をT2とすると、T1>T2となっている。
【0044】
ここで、図6は、図3に示した走行ルートP1における燃料消費量マップの一例を示した図である。同図において、横軸は燃料消費量、縦軸は距離(走行区間)となっている。この燃料消費量マップにおいて、現在地Aから交差点C1までの区間a、及び交差点C1から交差点C2までの区間bでは、走行速度v1と走行速度v2とが一定となっているので、区間aにおける燃料消費率f1と区間bにおける燃料消費率f2は、一定値となっている。
【0045】
交差点C2を通過する際、右折時にブレーキングが発生することを考慮し、ブレーキを踏んでいる間に進む距離については、実質的に燃料消費のない部分f3が算出されている。その後、右折後の加速を考慮して、走行速度v4に対応する部分では、燃料消費率f1,f2よりも大きい(燃費の悪い)燃料消費率f4が算出されている。
【0046】
交差点C2から交差点C4までの区間cでは、走行速度v5に対応する燃料消費率f5が算出されている。その後、走行速度v5が走行速度v6に移行する際の加速を考慮して、燃料消費率f5よりも大きい燃料消費率f6が算出され、走行速度v6に移行後は、交差点C4を通過するまで燃料消費率f6よりも小さい燃料消費率f7が算出されている。交差点C4から目的地Bまでの区間dでは、走行速度v7に対応する燃料消費率f8が算出されている。
【0047】
また、図7は、図3に示した走行ルートP2における燃料消費量マップの一例を示した図である。同図において、横軸は燃料消費量、縦軸は距離(走行区間)となっている。この燃料消費量マップにおいて、現在地Aから交差点C1までの区間aでは、走行速度v8に対応する燃料消費率f9は、一定値となっている。
【0048】
交差点C1を通過する際、右折時にブレーキングが発生することを考慮し、ブレーキを踏んでいる間に進む距離については、実質的に燃料消費のない部分f10が算出されている。その後、右折後の加速を考慮して、走行速度v9に対応する部分では、燃料消費率f9よりも大きい燃料消費率f11が算出されている。
【0049】
交差点C1から交差点C3までの区間eでは、走行速度v10に対応する燃料消費率f12が算出されている。交差点C3での左折では、交差点C1の右折の場合と同様に、ブレーキを踏んでいる間に進む距離について実質的に燃料消費のない部分f13が算出され、その後の加速を考慮して、走行速度v11に対応する部分では、燃料消費率f12よりも大きい燃料消費率f14が算出されている。
【0050】
交差点C3から交差点C4までの区間fでは、前半部分は走行速度v12に対応する燃料消費率f15が算出されている。また、後半部分では、下り勾配による自然加速が加味された走行速度v13を考慮して、燃料消費率f15よりも小さい燃料消費率f16が算出されている。
【0051】
交差点C4を通過する際、右折時に再びブレーキングが発生することを考慮し、ブレーキを踏んでいる間に進む距離については、実質的に燃料消費のない部分f17が算出されている。その後、右折後の加速を考慮して、走行速度v14に対応する部分では、燃料消費率f9よりも大きい燃料消費率f18が算出されている。交差点Cから目的地Bまでの区間dでは、走行速度v15に対応する燃料消費率f19が算出されている。
【0052】
図4及び図5に示した例では、燃料消費率f1〜f8で見積もられる走行ルートP1の燃料消費量をF1とし、燃料消費量f9〜f19で見積もられる走行ルートP2の所要時間をF2とすると、F2>F1となっている。
【0053】
走行ルートごとの目的地までの所要時間及び燃料消費量を算出した後、車両走行支援装置1は、優先順位入力受付部13に入力された優先順位の確認を行う(ステップS06)。そして、車両走行支援装置1は、入力された優先順位が所要時間である場合には、所要時間が最も短い走行ルートを推奨走行ルートとして提示し、入力された優先順位が燃料消費量である場合には、燃料消費量が最も小さい走行ルートを推奨走行ルートとして提示する。
【0054】
図4〜図7の例では、車両走行支援装置1は、所要時間が優先である場合には、目的地Bまでの所要時間が短い走行ルートP2を推奨走行ルートとしてディスプレイ17に表示し、燃料消費量が優先である場合には、目的地Bまでの燃料消費量が小さい走行ルートP1を推奨走行ルートとしてディスプレイ17に表示する。
【0055】
そして、車両走行支援装置1は、表示した推奨走行ルートの青信号通過マップに基づいて、推奨走行ルートの各区間で青信号の間に信号機を通過可能となる推奨走行速度をディスプレイ17に順次表示する(ステップS07)。車両が目的地に到達すると、車両走行支援装置1の処理が終了する。
【0056】
以上説明したように、車両走行支援装置1では、信号機が青信号から赤信号に切り替わる時間間隔を示す信号機情報と、走行ルート上に存在する車両の速度変化パラメータとの双方に基づいて推奨走行速度を演算している。速度変化パラメータには、車両の方向転換に関するパラメータ、道路形状に関するパラメータ、及び道路規制に関するパラメータが含まれ、車両が走行する際に加減速を生じさせる要因が考慮されている。したがって、加減速が多く発生する走行ルートを走行する場合であっても、推奨走行速度を精度良く求めることができ、最適な推奨走行ルートを提示することが可能となる。
【0057】
また、車両走行支援装置1では、所要時間及び燃料消費量の優先順位の入力を受け付け、所要時間を優先させる場合に所要時間が最も短い走行ルートを推奨走行ルートとして提示し、燃料消費量を優先させる場合に燃料消費量が最も小さい走行ルートを推奨走行ルートとして提示する。したがって、ユーザがより重要視する事項に応じて推奨走行ルートを提示できる。ドライバにとって、所要時間を優先する場合には時間の節約となり、燃料消費量を優先する場合には燃料の節約となり、燃費も向上する。また、無駄な加減速が少なくなることで、車両走行時の快適性も保たれる。
【図面の簡単な説明】
【0058】
【図1】本発明に係る車両走行支援装置の一実施形態を示すブロック図である。
【図2】図1に示した車両走行支援装置の動作を示すフローチャートである。
【図3】車両の現在地から目的地に至る走行ルートの候補の一例を示す図である。
【図4】一方の走行ルートにおける青信号通過マップの一例を示す図である。
【図5】他方の走行ルートにおける青信号通過マップの一例を示す図である。
【図6】一方の走行ルートにおける燃料消費量マップの一例を示す図である。
【図7】他方の走行ルートにおける燃料消費量マップの一例を示す図である。
【符号の説明】
【0059】
1…車両走行支援装置、13…優先順位受付部、15…信号機情報格納部、16…速度変化パラメータ格納部、22…推奨走行速度演算部、23…所要時間演算部、24…燃料消費量演算部、A…現在地、B…目的地、S1〜S4…信号機、P1,P2…走行ルート。
【特許請求の範囲】
【請求項1】
車両の現在地から目的地までの推奨走行ルートを提示する車両走行支援装置であって、
前記走行ルート上に存在する信号機の動作に関する信号機情報を格納する信号機情報格納手段と、
前記走行ルート上に存在する前記車両の速度変化パラメータを格納する速度変化パラメータ格納手段と、
前記信号機情報及び前記速度変化パラメータに基づいて、青信号の間に前記信号機を通過可能となる推奨走行速度を演算する走行速度演算手段と、
を備えたことを特徴とする車両走行支援装置。
【請求項2】
前記速度変化パラメータは、前記車両の方向転換に関するパラメータを含むことを特徴とする請求項1記載の車両走行支援装置。
【請求項3】
前記速度変化パラメータは、前記走行ルートの道路形状に関するパラメータを含むことを特徴とする請求項1又は2記載の車両走行支援装置。
【請求項4】
前記速度変化パラメータは、前記走行ルートの道路規制に関するパラメータを含むことを特徴とする請求項1〜3のいずれか一項記載の車両走行支援装置。
【請求項5】
前記推奨走行速度に基づいて、前記車両が前記目的地に到達するまでの所要時間を演算する所要時間演算手段を更に備え、
前記車両の現在地から目的地までの走行ルートが複数存在する場合に、前記所要時間が最も短い走行ルートを前記推奨走行ルートとして提示することを特徴とする請求項1〜4のいずれか一項記載の車両走行支援装置
【請求項6】
前記推奨走行速度に基づいて、前記車両が前記目的地に到達するまでの燃料消費量を演算する燃料消費量演算手段を更に備え、
前記車両の現在地から目的地までの走行ルートが複数存在する場合に、前記燃料消費量が最も小さい走行ルートを前記推奨走行ルートとして提示することを特徴とする請求項5記載の車両走行支援装置。
【請求項7】
前記所要時間及び前記燃料消費量の優先順位の入力を受け付ける入力受付手段を更に備え、
前記所要時間を優先させる場合に前記所要時間が最も短い走行ルートを前記推奨走行ルートとして提示し、前記燃料消費量を優先させる場合に前記燃料消費量が最も小さい走行ルートを前記推奨走行ルートとして提示することを特徴とする請求項6記載の車両走行支援装置。
【請求項1】
車両の現在地から目的地までの推奨走行ルートを提示する車両走行支援装置であって、
前記走行ルート上に存在する信号機の動作に関する信号機情報を格納する信号機情報格納手段と、
前記走行ルート上に存在する前記車両の速度変化パラメータを格納する速度変化パラメータ格納手段と、
前記信号機情報及び前記速度変化パラメータに基づいて、青信号の間に前記信号機を通過可能となる推奨走行速度を演算する走行速度演算手段と、
を備えたことを特徴とする車両走行支援装置。
【請求項2】
前記速度変化パラメータは、前記車両の方向転換に関するパラメータを含むことを特徴とする請求項1記載の車両走行支援装置。
【請求項3】
前記速度変化パラメータは、前記走行ルートの道路形状に関するパラメータを含むことを特徴とする請求項1又は2記載の車両走行支援装置。
【請求項4】
前記速度変化パラメータは、前記走行ルートの道路規制に関するパラメータを含むことを特徴とする請求項1〜3のいずれか一項記載の車両走行支援装置。
【請求項5】
前記推奨走行速度に基づいて、前記車両が前記目的地に到達するまでの所要時間を演算する所要時間演算手段を更に備え、
前記車両の現在地から目的地までの走行ルートが複数存在する場合に、前記所要時間が最も短い走行ルートを前記推奨走行ルートとして提示することを特徴とする請求項1〜4のいずれか一項記載の車両走行支援装置
【請求項6】
前記推奨走行速度に基づいて、前記車両が前記目的地に到達するまでの燃料消費量を演算する燃料消費量演算手段を更に備え、
前記車両の現在地から目的地までの走行ルートが複数存在する場合に、前記燃料消費量が最も小さい走行ルートを前記推奨走行ルートとして提示することを特徴とする請求項5記載の車両走行支援装置。
【請求項7】
前記所要時間及び前記燃料消費量の優先順位の入力を受け付ける入力受付手段を更に備え、
前記所要時間を優先させる場合に前記所要時間が最も短い走行ルートを前記推奨走行ルートとして提示し、前記燃料消費量を優先させる場合に前記燃料消費量が最も小さい走行ルートを前記推奨走行ルートとして提示することを特徴とする請求項6記載の車両走行支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−169624(P2010−169624A)
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願番号】特願2009−14335(P2009−14335)
【出願日】平成21年1月26日(2009.1.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願日】平成21年1月26日(2009.1.26)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]