
車両転回検出装置および当該装置を備えた車両用ナビゲーション装置
【課題】 車両が走行中の道路を転回(Uターン)したことを確実に判別可能な車両転回検出装置、および当該装置を備えたナビゲーション装置を提供すること。
【解決手段】ECU8は、車両が車線区分線を横断すると第1タイマを起動する。位置検出器1が検出した車両の進行方向から、当該車両が反転したことが確認された際、第1タイマが起動中であって経過時間が所定時間以内である場合や、第2タイマの示す経過時間が所定時間以内で第1タイマの起動が確認された場合、すなわち、所定時間範囲内において、車両が進行方向の反転と車線区分線の横断とを行った場合に、車両が転回(Uターン)したと判別する。
【解決手段】ECU8は、車両が車線区分線を横断すると第1タイマを起動する。位置検出器1が検出した車両の進行方向から、当該車両が反転したことが確認された際、第1タイマが起動中であって経過時間が所定時間以内である場合や、第2タイマの示す経過時間が所定時間以内で第1タイマの起動が確認された場合、すなわち、所定時間範囲内において、車両が進行方向の反転と車線区分線の横断とを行った場合に、車両が転回(Uターン)したと判別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の転回(Uターン)を検出する車両転回検出装置、および当該装置を備えた車両用ナビゲーション装置に関する。
【背景技術】
【0002】
従来、車両の現在位置および進行方向に従ってナビゲーション動作を行う車両用ナビゲーション装置が公知である。例えば、特許文献1の装置では、車両が走行中の可能性がある道路を選定するとともに、選定された各道路に対して、当該道路を車両が走行中である可能性を数値で示した「確からしさの値」を、それぞれ算出する。この「確からしさの値」は、車両の現在位置と選定された各道路との距離が小さい程、大きな値として算出される。その際、Uターン道路(車両が走行中の道路の対向車線を示す)に関しては、前述の距離が最も小さくなり、算出される「確からしさの値」は大きくなるが、車両がUターンする頻度は低いため、算出される「確からしさの値」から所定値を減算する。こうして「確からしさの値」が最も高い道路を、車両が走行中の道路であると判別し、ナビゲーション動作を行う。
【特許文献1】特開平10−9883号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来装置では、Uターン道路については、算出された「確からしさの値」から所定値を減算するのみであり、他の道路の「確からしさの値」によっては、車両がUターン道路を走行中である(車両がUターンした)にも関わらず、他の道路を走行中であると誤判別される場合がある。
【0004】
本発明は、上記の問題に鑑みてなされたものであり、車両が走行中の道路を転回(Uターン)したことを確実に判別可能な車両転回検出装置、および当該装置を備えたナビゲーション装置の提供を目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、請求項1に記載の車両転回検出装置では、車両が走行中の道路に標示された車線区分線を、当該車両が横断したことを検出する横断検出手段と、車両の進行方向が反転したことを検出する反転検出手段と、反転検出手段および横断検出手段によって、車両が進行方向を反転し、かつ、車線区分線を横断したことが検出された場合に、車両が転回したと判定する判定手段とを備えることを特徴とする。
【0006】
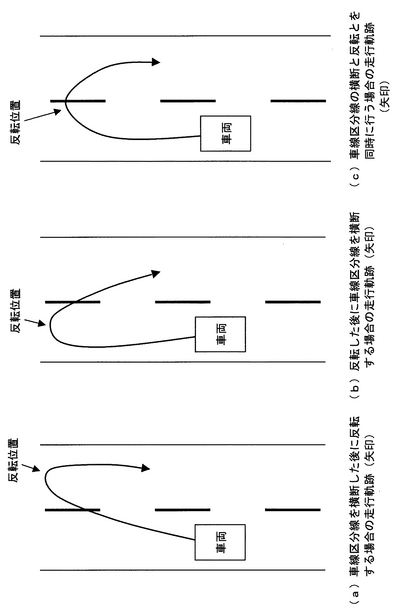
車両が転回(Uターン)する場合、基本的に、当該車両は進行方向の反転および車線区分線の横断を行うこととなる(図9参照)。そこで、車両が走行中の道路に標示された車線区分線を当該車両が横断したことを横断検出手段によって検出し、車両の進行方向が反転したことを反転検出手段によって検出する。そして、反転検出手段および横断検出手段によって、車両が進行方向を反転し、かつ、車線区分線を横断したことが検出された場合に、車両が転回したと判定する。これにより、本車両転回検出装置では、車両が走行中の道路を転回(Uターン)したことを確実に判別できるとともに、車両がUターンしたにも関わらず、他の道路を走行中であると誤判別するのを防止できる。
【0007】
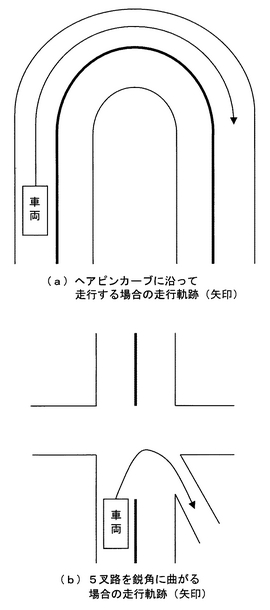
請求項2に記載のように、判定手段は、反転検出手段が車両の進行方向の反転を検出したが、横断検出手段が車両による車線区分線の横断を検出しなかった場合、車両がカーブに沿って走行したと判定することが望ましい。反転検出手段が車両の進行方向の反転を検出したが、横断検出手段が車両による車線区分線の横断を検出しなかった場合、車両は、例えばヘアピンカーブ等のカーブに沿って走行したり、例えば5叉路や6叉路を鋭角に曲がったと考えられるためである(図10参照)。
【0008】
請求項3に記載のように、判定手段は、反転手段が車両の進行方向の反転を検出し、かつ、横断検出手段によって、車両が同一の車線区分線を2回横断したことを検出した場合には、車両はカーブに沿って走行したと判定することが望ましい。車両が同一の車線区分線を2回横断した場合、当該車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)し、その後に再び車線区分線を横断して、元の車線に戻って走行していると考えられるためである。
【0009】
請求項4に記載のように、横断検出手段は、車両が走行中の道路の路面を撮影する撮影手段を有し、撮影手段が撮影した撮影画像から、車両が車線区分線を横断したことを検出することが望ましい。これにより、車両が車線区分線を横断したことを確実に検出することができる。
【0010】
請求項5に記載のように、横断検出手段は、撮影手段の撮影方向が車両の進行方向を基準とする所定方向に向いている場合に、横断検出動作を行うことが望ましい。これにより、車両が車線区分線を横断したことを、より確実に検出することができる。
【0011】
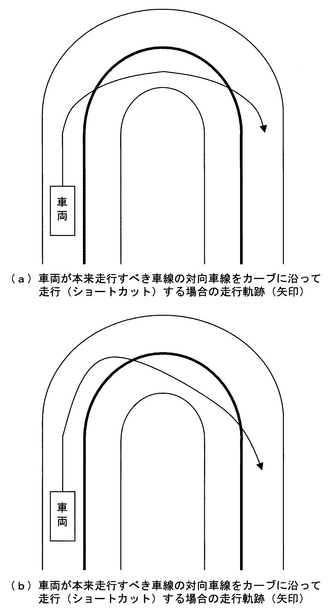
請求項6に記載のように、判定手段は、車両が車線区分線を横断した場合であっても、撮影手段が撮影した撮影画像において、車線区分線が、車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、車両はカーブに沿って走行したと判定することが望ましい。このような場合、車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)中であり、その後に再び車線区分線を横断し、元の車線に戻って走行すると考えられるためである(図11参照)。
【0012】
請求項7に記載のように、車両の現在位置を検出する位置検出手段と、地図データを記憶する地図データ記憶手段とを設け、判定手段は、位置検出手段の検出結果及び地図データ記憶手段に記憶された地図データから、車両が道路以外の場所を走行中であるとみなされる場合には、判定動作を中止することが望ましい。例えば駐車場等、車両が道路以外の場所を走行中である場合には、当該車両が車線区分線を横断することはない。車両が道路以外の場所を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0013】
請求項8に記載のように、判定手段は、位置検出手段の検出結果および地図データ記憶手段に記憶された地図データから、車両が交差点近傍を走行中であるとみなされる場合には、判定動作を中止することが望ましい。車両が交差点近傍を走行中の場合、当該車両が転回を行う可能性は低い。車両が交差点近傍を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0014】
請求項9に記載のように、判定手段は、車両のイグニッションスイッチがオフである場合には、判定動作を中止することが望ましい。例えばターンテーブルによって車両の進行方向を反転した場合や、車両がフェリーに搭載されて移動されている場合等、車両のイグニッションスイッチがオフ(車両が起動していない状態)であって進行方向が反転した場合には、当該車両が車線区分線を横断することはない。このような場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0015】
請求項10に記載のように、車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置は、車両転回検出装置を備え、当該装置の判定結果に従ってナビゲーション動作を行うことが望ましい。これにより、本車両用ナビゲーション装置は、車両が転回したのか、それともカーブに沿って走行したのかを、車両転回検出装置の判定結果から認識でき、より正確なナビゲーション動作を行うことができる。
【0016】
請求項11に記載の車両転回検出装置では、車両が走行中の道路に標示された車線区分線を、当該車両が横断したことを検出する横断検出手段と、車両の進行方向が反転したことを検出する反転検出手段と、反転検出手段および横断検出手段によって、所定時間範囲内において、車両が進行方向の反転と車線区分線の横断とを行ったことが検出された場合に、車両が転回したと判定する判定手段とを備えることを特徴とする。
【0017】
車両が転回(Uターン)する場合、当該車両は所定時間範囲内に、進行方向の反転と車線区分線の横断とを両方行うこととなる(図9参照)。そこで、車両が走行中の道路に標示された車線区分線を当該車両が横断したことを横断検出手段によって検出し、車両の進行方向が反転したことを反転検出手段によって検出する。そして、反転検出手段および横断検出手段によって、所定時間範囲内において、車両が進行方向の反転と車線区分線の横断とを行ったことが検出された場合に、車両が転回したと判定する。これにより、本車両転回検出装置では、車両が走行中の道路を転回(Uターン)したことを確実に判別できるとともに、車両がUターンしたにも関わらず、他の道路を走行中であると誤判別するのを防止できる。
【0018】
請求項12に記載のように、判定手段は、所定時間範囲内において、反転検出手段が車両の進行方向の反転を検出し、かつ、横断検出手段が車両による車線区分線の横断を検出しなかった場合、車両がカーブに沿って走行したと判定することが望ましい。前述した所定時間範囲内に、反転検出手段が車両の進行方向の反転を検出し、かつ、横断検出手段が車両の車線区分線の横断を検出しなかった場合、車両は、例えばヘアピンカーブ等のカーブに沿って走行したり、例えば5叉路や6叉路を鋭角に曲がったと考えられるためである(図10参照)。
【0019】
請求項13に記載のように、判定手段は、横断検出手段によって、所定時間範囲内に車両が同一の車線区分線を2回横断したことを検出した場合には、車両はカーブに沿って走行したと判定することが望ましい。前述した所定時間範囲内に車両が同一の車線区分線を2回横断した場合、当該車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)し、その後に再び車線区分線を横断して、元の車線に戻って走行していると考えられるためである。
【0020】
請求項14に記載のように、横断検出手段は、車両が走行中の道路の路面を撮影する撮影手段を有し、撮影手段が撮影した撮影画像から、車両が車線区分線を横断したことを検出することが望ましい。これにより、車両が車線区分線を横断したことを確実に検出することができる。
【0021】
請求項15に記載のように、横断検出手段は、撮影手段の撮影方向が車両の進行方向を基準とする所定方向に向いている場合に、横断検出動作を行うことが望ましい。これにより、車両が車線区分線を横断したことを、より確実に検出することができる。
【0022】
請求項16に記載のように、判定手段は、車両が車線区分線を横断した場合であっても、撮影手段が撮影した撮影画像において、車線区分線が、車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、車両はカーブに沿って走行したと判定することが望ましい。このような場合、車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)中であり、その後に再び車線区分線を横断し、元の車線に戻って走行すると考えられるためである(図11参照)。
【0023】
請求項17に記載のように、車両の現在位置を検出する位置検出手段と、地図データを記憶する地図データ記憶手段とを設け、判定手段は、位置検出手段の検出結果及び地図データ記憶手段に記憶された地図データから、車両が道路以外の場所を走行中であるとみなされる場合には、判定動作を中止することが望ましい。例えば駐車場等、車両が道路以外の場所を走行中である場合には、当該車両が車線区分線を横断することはない。車両が道路以外の場所を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0024】
請求項18に記載のように、判定手段は、位置検出手段の検出結果および地図データ記憶手段に記憶された地図データから、車両が交差点近傍を走行中であるとみなされる場合には、判定動作を中止することが望ましい。車両が交差点近傍を走行中の場合、当該車両が転回を行う可能性は低い。車両が交差点近傍を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0025】
請求項19に記載のように、判定手段は、車両のイグニッションスイッチがオフである場合には、判定動作を中止することが望ましい。例えばターンテーブルによって車両の進行方向を反転した場合や、車両がフェリーに搭載されて移動されている場合等、車両のイグニッションスイッチがオフ(車両が起動していない状態)であって進行方向が反転した場合には、当該車両が車線区分線を横断することはない。このような場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0026】
請求項20に記載のように、車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置は、車両転回検出装置を備え、当該装置の判定結果に従ってナビゲーション動作を行うことが望ましい。これにより、本車両用ナビゲーション装置は、車両が転回したのか、それともカーブに沿って走行したのかを、車両転回検出装置の判定結果から認識でき、より正確なナビゲーション動作を行うことができる。
【0027】
請求項21に記載の車両転回検出装置では、車両が走行中の道路に標示された車線を、当該車両が横断したことを検出する横断検出手段と、車両の進行方向が反転したことを検出する反転検出手段と、反転検出手段および横断検出手段の検出結果から、車両が進行方向を反転し、かつ、車線区分線を1回横断した場合、車両が転回したと判定する判定手段とを備えることを特徴とする。
【0028】
車両が転回(Uターン)する場合、当該車両は進行方向を反転し、かつ、車線区分線を1回横断することとなる(図9参照)。そこで、車両が走行中の道路に標示された車線区分線を当該車両が横断したことを横断検出手段によって検出し、車両の進行方向が反転したことを反転検出手段によって検出する。そして、反転検出手段および横断検出手段の検出結果から、車両が進行方向を反転し、かつ、車線区分線を1回横断した場合、車両が転回したと判定する。これにより、本車両転回検出装置では、車両が走行中の道路を転回(Uターン)したことを確実に判別できるとともに、車両がUターンしたにも関わらず、他の道路を走行中であると誤判別するのを防止できる。
【0029】
請求項22に記載のように、判定手段は、反転検出手段が車両の進行方向の反転を検出したが、横断検出手段が車両による車線区分線の横断を検出しなかった場合、車両がカーブに沿って走行したと判定することが望ましい。反転検出手段が車両の進行方向の反転を検出したが、横断検出手段が車両による車線区分線の横断を検出しなかった場合、車両は、例えばヘアピンカーブ等のカーブに沿って走行したり、例えば5叉路や6叉路を鋭角に曲がったと考えられるためである(図10参照)。
【0030】
請求項23に記載のように、判定手段は、反転手段が車両の進行方向の反転を検出し、かつ、横断検出手段によって、車両が同一の車線区分線を2回横断したことを検出した場合には、車両はカーブに沿って走行したと判定することが望ましい。車両が進行方向を反転し、かつ、同一の車線区分線を2回横断した場合、当該車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)し、その後に再び車線区分線を横断して、元の車線に戻って走行していると考えられるためである。
【0031】
請求項24に記載のように、横断検出手段は、車両が走行中の道路の路面を撮影する撮影手段を有し、撮影手段が撮影した撮影画像から、車両が車線区分線を横断したことを検出することが望ましい。これにより、車両が車線区分線を横断したことを確実に検出することができる。
【0032】
請求項25に記載のように、横断検出手段は、撮影手段の撮影方向が車両の進行方向を基準とする所定方向に向いている場合に、横断検出動作を行うことが望ましい。これにより、車両が車線区分線を横断したことを、より確実に検出することができる。
【0033】
請求項26に記載のように、判定手段は、車両が車線区分線を横断した場合であっても、撮影手段が撮影した撮影画像において、車線区分線が、車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、車両はカーブに沿って走行したと判定することが望ましい。このような場合、車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)中であり、その後に再び車線区分線を横断し、元の車線に戻って走行すると考えられるためである(図11参照)。
【0034】
請求項27に記載のように、車両の現在位置を検出する位置検出手段と、地図データを記憶する地図データ記憶手段とを設け、判定手段は、位置検出手段の検出結果及び地図データ記憶手段に記憶された地図データから、車両が道路以外の場所を走行中であるとみなされる場合には、判定動作を中止することが望ましい。例えば駐車場等、車両が道路以外の場所を走行中である場合には、当該車両が車線区分線を横断することはない。車両が道路以外の場所を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0035】
請求項28に記載のように、判定手段は、位置検出手段の検出結果および地図データ記憶手段に記憶された地図データから、車両が交差点近傍を走行中であるとみなされる場合には、判定動作を中止することが望ましい。車両が交差点近傍を走行中の場合、当該車両が転回を行う可能性は低い。車両が交差点近傍を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0036】
請求項29に記載のように、判定手段は、車両のイグニッションスイッチがオフである場合には、判定動作を中止することが望ましい。例えばターンテーブルによって車両の進行方向を反転した場合や、車両がフェリーに搭載されて移動されている場合等、車両のイグニッションスイッチがオフ(車両が起動していない状態)であって進行方向が反転した場合には、当該車両が車線区分線を横断することはない。このような場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0037】
請求項30に記載のように、車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置は、車両転回検出装置を備え、当該装置の判定結果に従ってナビゲーション動作を行うことが望ましい。これにより、本車両用ナビゲーション装置は、車両が転回したのか、それともカーブに沿って走行したのかを、車両転回検出装置の判定結果から認識でき、より正確なナビゲーション動作を行うことができる。
【発明を実施するための最良の形態】
【0038】
(第1実施形態)
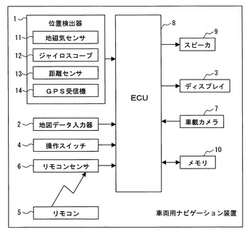
図1は、本発明の第1の実施形態における車両転回検出装置の全体構成を示すブロック図である。本実施形態の車両転回検出装置は、車両用ナビゲーション装置に組み込まれて動作する。
【0039】
図1に示すように、位置検出器1は、地磁気センサ11、ジャイロスコープ12、距離センサ13、GPS受信機14から構成され、車両の現在位置および進行方向の検出を行う。
【0040】
地磁気センサ11は、例えばパーマロイ等の環状の強磁性体に、これを励磁するための励磁巻線と、方向検出用の直交する2つの検出巻線とが巻かれた構成を持つ。そして、励磁巻線に交流電圧を印加することによって2つの検出巻線に発生する電圧を計測し、これに基づいて車両の進行方向を絶対方位として検出する。
【0041】
ジャイロスコープ12は、例えば水晶振動子を備え、当該振動子を振動させた際に発生する、コリオリ力に基づく振動から、車両のヨー角速度(ヨーレート)を検出する。
【0042】
距離センサ13は、例えば車両に搭載された図示しない車輪や車軸の回転信号に基づいて、車両の移動距離を検出する。
【0043】
GPS受信機14は、人工衛星である図示しないGPS衛星から送信される位置測定用のGPS信号を受信し、車両が現在走行している地点の緯度や経度、高度を検出する。
【0044】
位置検出器1は、前述した4つの機器の検出結果を相互に補間することによって、車両の現在位置および進行方向の検出を行う。もちろん、要求される検出精度によっては、前述の4つの機器を全て備える必要はない。なお、車両の現在位置および進行方向の検出に関しては、ステアリングセンサ等、他のセンサによる検出信号に基づいて行うこととしてもよい。
【0045】
地図データ入力器2は、例えば記憶媒体としてハードディスクを有し、道路情報、車線情報、建造物情報、各地域の住所情報や郵便番号情報などを含む地図データと、地図画像を表示する地図画像データとを記憶する。地図データおよび地図画像データに関しては、CD−ROMやDVD−ROM等に記憶することとしても良い。
【0046】
ディスプレイ3は、車載用の小型ディスプレイであり、地図画像の表示を含む各種ナビゲーション表示を行う。前述の各種ナビゲーション表示に関しては、車載用のヘッドアップディスプレイ等を用いることとしても良い。
【0047】
操作スイッチ4は、複数のメカニカルなスイッチから構成され、各種ナビゲーション動作の開始や終了を指示する。前述の各種ナビゲーション指示に関しては、操作キーを表示する表示パネルと、当該表示パネルに表示された操作キーを押したことを検出するタッチパネルを備えたタッチスイッチによって構成しても良い。また、音声認識を利用して行うこととしても良い。
【0048】
リモコン5は、例えば各種機能スイッチを備えた多機能リモコンであり、リモコンセンサ6を介して、上述した操作スイッチ4とほぼ同様の操作を行うことができる。
【0049】
車載用カメラ7は、例えばCMOSカメラであり、車両が走行中の道路の路面に標示された車線区分線を撮影して画像データを生成する。この車載用カメラ7は、初期位置として、車両の正面前方であって、車両が直進走行しているときに、その走行中の車線の車線区分線を撮影可能に車両に取り付けられる。また、車載用カメラ7は、図示しないモータによって撮影方向を変更できるよう構成されている。具体的には、地磁気センサ11やジャイロスコープ12等によって検出される進行方向を向くように、撮影方向が制御される。車載用カメラ7の撮影方向が変更されるたびに、当該変更を行った際のモータの回転数が図示しない内部メモリに累積的に記憶され、内部メモリに記憶された回転数から、当該カメラの撮影方向が把握可能となっている。なお、前述した車線区分線の撮影に関しては、車載用のCCDカメラ等を用いることとしても良い。
【0050】
ECU8は、ナビゲーション用ECUであり、操作スイッチ4またはリモコン5からの指示に従って、地図画像表示を含む各種ナビゲーション動作を実行する。具体的には、ECU8は、位置検出器1が検出した車両の現在位置および進行方向に基づいて、地図データ入力器2から車両の現在位置周辺の地図画像データを読み出し、車両の現在位置を示すマークを重畳した地図画像をディスプレイ3に表示させるとともに、スピーカ9から各種音声案内を行わせる。また、ECU8は、目的地までの移動経路を設定してディスプレイ3に表示された地図画像に重畳表示することも行う。
【0051】
さらに、ECU8は、図示しない2つの内部タイマ(第1タイマおよび第2タイマ)を有し、位置検出器1の検出結果から認識される車両の反転、および、車載用カメラ7が生成した画像データに従って、車両が転回(Uターン)したことを判別することも行う。なお、本ECU8は位置検出器1の検出結果から、車両の進行方向が180°±(10°〜20°)変化した場合に、車両が反転したと認識する。
【0052】
メモリ10は、ECU8が各種動作を行う際の一時的な記憶領域として利用される。前述の記憶領域に関しては、例えばメモリカード等を利用することとしても良い。
【0053】
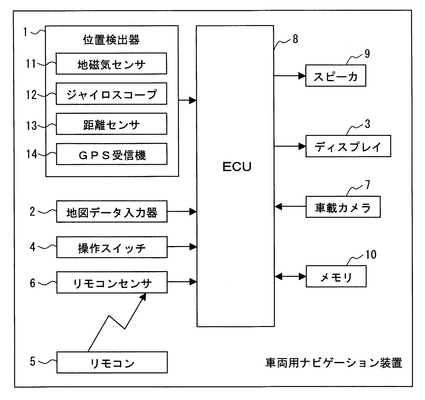
図2は、本実施形態の車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。本フローチャートの処理は、所定時間毎に実行される。
【0054】
ステップ201では、ECU8は、車載用カメラ7が接続されているか否かを確認する。車載用カメラ7の接続が確認された場合は、ステップ202へ進む。確認されなかった場合は、処理を終了する。
【0055】
ステップ202では、車載用カメラ7は正常動作中であるか否かを確認する。前述の正常動作中とは、車載用カメラ7から画像データを取得可能であり、かつ、車載用カメラ7の撮影方向が車両の進行方向を基準とする所定方向に向いていることをいう。車載用カメラ7が正常動作中であることが確認された場合は、ステップ203へ進む。確認されなかった場合は、処理を終了する。
【0056】
ステップ203では、車載用カメラ7から画像データを取得する。ステップ204では、ステップ203で取得した画像データに画像認識処理を施し、画像上における車線区分線の位置を認識する。上述したステップ201〜204の処理により、車両が車線区分線を横断したことを確実に検出できるのである。
【0057】
ステップ205では、ステップ204で認識された車線区分線の位置から、車両が車線区分線を横断するよう走行したか否かを判定する。車両が車線区分線を横断するよう走行した場合は、ステップ206へ進む。そうでない場合は、処理を終了する。
【0058】
ステップ206では、位置検出器1の検出結果および地図データ入力器2に記憶された地図データから、車両が道路上を走行中であるか否かを判定する。例えば駐車場等、車両が道路以外の場所を走行中である場合には、当該車両が車線区分線を横断することはなく、第1タイマを起動しないようにして誤動作を防止するためである。車両が道路上を走行中である場合は、ステップ207へ進む。そうでない場合は、処理を終了する。
【0059】
ステップ207では、第1タイマを起動して経過時間のカウントを開始する。本実施形態では、この第1タイマの起動によって、車両が車線区分線を横断したこと、および横断時点からの経過時間のカウントを行う。
【0060】
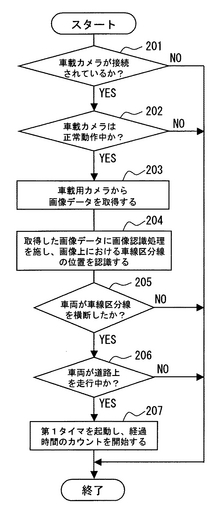
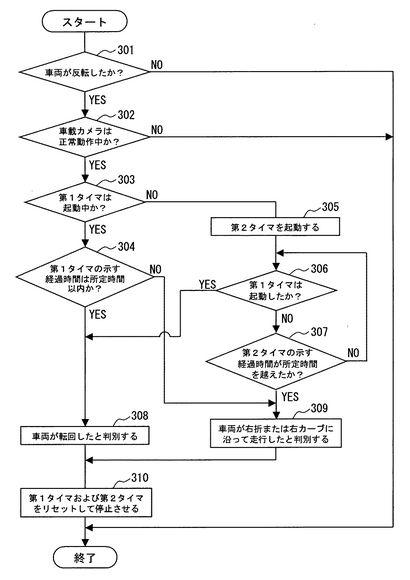
図3は、本実施形態の車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。本フローチャートの処理は、所定時間毎に実行される。
【0061】
ステップ301では、ECU8は、位置検出器1が検出した車両の進行方向から、当該車両が反転したか否かを判定する。車両が反転したと判定された場合は、ステップ302へ進む。そうでない場合は、処理を終了する。
【0062】
ステップ302では、ECU8は、車載用カメラ7が正常動作中であるか否かを確認する。車載用カメラ7が正常動作中であることが確認された場合は、ステップ303へ進む。確認されなかった場合は、処理を終了する。
【0063】
ステップ303では、第1タイマが起動中であるか否かを確認する。第1タイマが起動中である場合は、ステップ304へ進む。第1タイマが起動していない場合は、ステップ305へ進む。
【0064】
ステップ304では、第1タイマの示す経過時間が所定時間以内であるか否かを判定する。本ステップは、車両が車線区分線を横断した後、所定時間以内に車両が反転したか否かを判定するものである。第1タイマの示す経過時間が所定時間以内である場合は、ステップ308へ進む。そうでない場合は、ステップ309へ進む。
【0065】
ステップ305では、第2タイマを起動して経過時間のカウントを開始する。ステップ306では、第1タイマが起動したか否かを確認する。第1タイマの起動を確認した場合は、ステップ308へ進む。第1タイマの起動を確認できない場合は、ステップ307へ進む。ステップ307では、第2タイマの示す経過時間が所定時間を超えたか否かを判定する。所定時間を超えた場合は、ステップ309へ進む。未だ所定時間を超えない場合は、ステップ306へ戻り、上述の判定を繰り返す。なお、ステップ306〜307は、車両が反転した時点から所定時間が経過するまでの間に、車両が車線区分線を横断したか否かを判定する処理である。
【0066】
ステップ308では、車両が転回(Uターン)したと判別し、ステップ310へ進む。一方、ステップ309では、車両が右折した、または右カーブに沿って走行したと判別し、ステップ310へ進む。第1タイマの示す経過時間が所定時間を超えている場合や、第2タイマを起動した後、当該タイマの示す経過時間が所定時間を超えるまでに第1タイマの起動を確認できない場合、車両は、例えばヘアピンカーブ等のカーブに沿って走行したり、例えば5叉路や6叉路を鋭角に曲がったりしたと考えられるためである(図10参照)。ステップ310では、第1タイマおよび第2タイマをリセットして停止させ、処理を終了する。
【0067】
このように、本実施形態の車両転回検出装置では、ECU8は、車両が車線区分線を横断すると第1タイマを起動する。車両が反転した際、第1タイマが起動中であって当該タイマの示す経過時間が所定時間以内である場合や、第2タイマの示す経過時間が所定時間以内であって第1タイマの起動が確認された場合、すなわち、所定時間範囲内において、車両が進行方向の反転と車線区分線の横断とを両方行った場合に、車両が転回(Uターン)したと判別する。これにより、本車両転回検出装置では、車両が走行中の道路を転回(Uターン)したことを確実に判別できるとともに、車両がUターンしたにも関わらず、他の道路を走行中であると誤判別するのを防止できる。
【0068】
(第2実施形態)
次に、本発明の第2の実施形態について説明する。前述した第1の実施形態では、車両が道路上を走行中であって、車線区分線を横断した場合に、第1タイマの起動を行った。しかしながら、本実施形態では、車両が道路上を走行中であって、車線区分線を横断した場合でも、車両のイグニッションスイッチ(以下、IGスイッチとする)がオフである場合には、第1タイマの起動を行わない。上述した点が、本実施形態のポイントである。
【0069】
その他の構成・動作は、前述した第1の実施形態の場合と同様であるため、説明を省略する。
【0070】
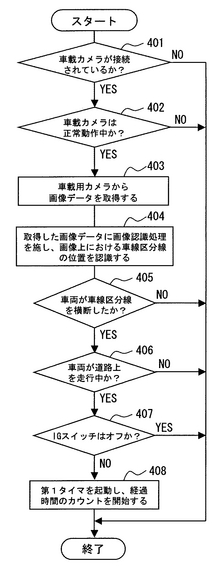
図4は、本実施形態の車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。本フローチャートの処理は、前述した第1の実施形態における図2のフローチャートに加え、IGスイッチがオフであるか否かを確認するステップを設ける。言い換えれば、ステップ407以外の全ての処理は、前述した図2のフローチャートの処理と同様であるため、説明を省略する。
【0071】
ステップ407では、ECU8は、IGスイッチがオフであるか否かを確認する。IGスイッチがオフでない場合は、ステップ408へ進む。IGスイッチがオフである場合には、処理を終了する。
【0072】
このように、本実施形態の車両転回検出装置では、ECU8は、車両のIGスイッチがオフである場合には、第1タイマの起動、すなわち、車両の転回の判定動作を行うことを禁止しており、それにより、車両が転回したとの判定が誤ってなされることを防止している。例えば車両がターンテーブルや、フェリー等に搭載されている場合等、進行方向が反転する場合があるが、イグニッションスイッチがOFFであるため、転回の判定動作は禁止される。
【0073】
なお、本実施形態では、IGスイッチがオフである場合に、第1タイマの起動を行わないよう構成した。しかしながら、これに限定されるものではなく、例えば車両のエンジンが停止状態である場合に、第1タイマの起動を行わないよう構成しても良い。また、例えば車両のサイドブレーキが引き込まれている(サイドブレーキが作動中である)場合に、第1タイマの起動を行わないよう構成しても良い。
【0074】
(第3実施形態)
次に、本発明の第3の実施形態について説明する。前述した第1の実施形態では、車両が反転した際、第1タイマが起動中であって当該タイマの示す経過時間が所定時間以内である場合や、第2タイマの示す経過時間が所定時間を超える前に第1タイマが起動した場合に、車両が転回を行ったと判別した。しかしながら、本実施形態では、車両が反転した際、第1タイマの示す経過時間が所定時間以内である場合や、第2タイマの示す経過時間が所定時間を超える前に第1タイマが起動した場合であっても、車載用カメラ7から取得した画像データを調べ、車両の進行方向に対して左側に車線区分線が位置する場合には、車両は右カーブに沿って走行したと判別する。このような場合、車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)中であり、その後に再び車線区分線を横断し、元の車線に戻って走行すると考えられるためである(図11参照)。
【0075】
その他の構成・動作は、前述した第1の実施形態の場合と同様であるため、説明を省略する。
【0076】
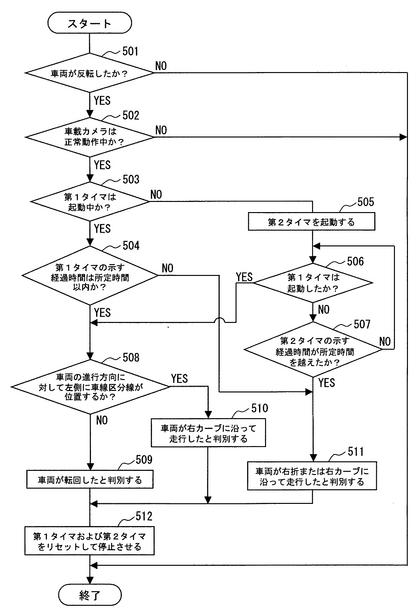
図5は、本実施形態の車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。本フローチャートの処理は、前述した第1の実施形態における図3のフローチャートに加え、車載用カメラ7から取得した画像データの示す画像から、車両の進行方向に対して左側に車線区分線が位置するか否かを判定するステップと、車両が右カーブに沿って走行したと判別するステップとを設ける。言い換えれば、ステップ508とステップ510以外の全ての処理は、前述した図3のフローチャートの処理と同様であるため、説明を省略する。
【0077】
ステップ507では、ECU8は、車載用カメラ7から取得した画像データの示す画像から、車両の進行方向に対して左側に車線区分線が位置するか否かを判定する。車両の進行方向に対して左側に車線区分線が位置する場合は、ステップ509へ進み、車両が右カーブに沿って走行したと判別して、ステップ512へ進む。車両の進行方向に対して右側に車線区分線が位置する場合は、ステップ509へ進む。
【0078】
以上の処理を追加することにより、車両がセンターライン(車線区分線)を超えつつ、カーブを走行した場合に、誤って車両が転回したと判定することを防止できる。
【0079】
(第4実施形態)
次に、本発明の第4の実施形態について説明する。前述した第1の実施形態では、車両が道路上を走行中であって、車線区分線を横断した場合に、第1タイマの起動を行った。しかしながら、本実施形態では、車両が道路上を走行中であって、車線区分線を横断した場合でも、車両が交差点付近を走行中であるとみなされる場合には、第1タイマの起動を行わない。上述した点が、本実施形態のポイントである。
【0080】
その他の構成・動作は、前述した第1の実施形態の場合と同様であるため、説明を省略する。
【0081】
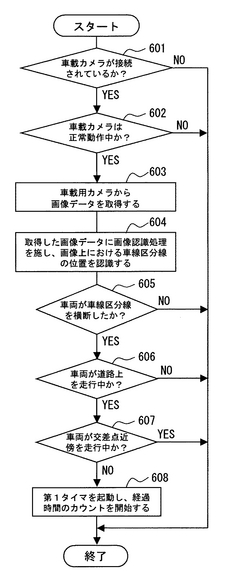
図6は、本実施形態の車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。本フローチャートの処理は、前述した第1の実施形態における図2のフローチャートに加え、車両が交差点近傍を走行中か否かを判定するステップを設ける。言い換えれば、ステップ607以外の全ての処理は、前述した図2のフローチャートの処理と同様であるため、説明を省略する。
【0082】
ステップ607では、ECU8は、位置検出器1の検出結果および地図データ入力器2に記憶された地図データから、車両が交差点近傍を走行中であるか否かを判定する。車両が交差点近傍を走行中であると判定された場合は、処理を終了する。そうでない場合は、ステップ608へ進み、第1タイマを起動して処理を終了する。
【0083】
このように、本実施形態の車両転回検出装置では、ECU8は、車両が交差点近傍を走行中であるとみなされる場合には、第1タイマの起動、すなわち、車両の転回の判定動作を行わない。車両が交差点近傍を走行中の場合、当該車両がセンターライン(車線区分線)を跨ぎつつ、転回(Uターン)を行う可能性は低い。このような場合には、車線の横断に基づく転回判定を禁止することにより、車両が転回したにも関わらず、誤って転回していないと判定することを防止できる。
【0084】
(第5実施形態)
次に、本発明の第5の実施形態について説明する。前述した第1の実施形態では、車両が反転した際、第1タイマが起動中であって当該タイマの示す経過時間が所定時間以内である場合には、車両が転回を行ったと判別した。しかしながら、本実施形態では、第1タイマが起動中である場合に車両が再度同一の車線区分線を横断する(すなわち、車両が同一の車線区分線を2回横断する)と、図示しないフラグをセットする。そして、車両が反転した際、第1タイマの示す経過時間が所定時間以内であっても、前述のフラグがセットされている場合には、車両が右カーブに沿って走行したと判別する。所定時間範囲内において、車両が進行方向を反転し、車線区分線を2回横断した場合、車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)し、その後に再び車線区分線を横断して、元の車線に戻って走行していると考えられるためである。
【0085】
その他の構成・動作は、前述した第1の実施形態の場合と同様であるため、説明を省略する。
【0086】
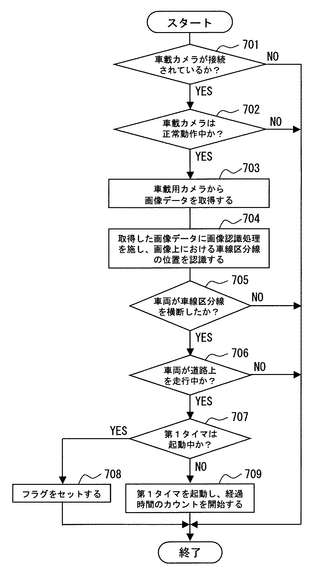
図7は、本実施形態の車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。本フローチャートの処理は、前述した第1の実施形態における図2のフローチャートに加え、第1タイマが起動中か否かを確認するステップ、フラグをセットするステップを設ける。言い換えれば、ステップ707〜708以外の全ての処理は、前述した図2のフローチャートの処理と同様であるため、説明を省略する。
【0087】
ステップ707では、第1タイマが起動中か否かを確認する。第1タイマが起動中である場合は、ステップ708へ進み、フラグをセットして処理を終了する。そうでない場合は、ステップ709へ進み、第1タイマを起動して処理を終了する。
【0088】
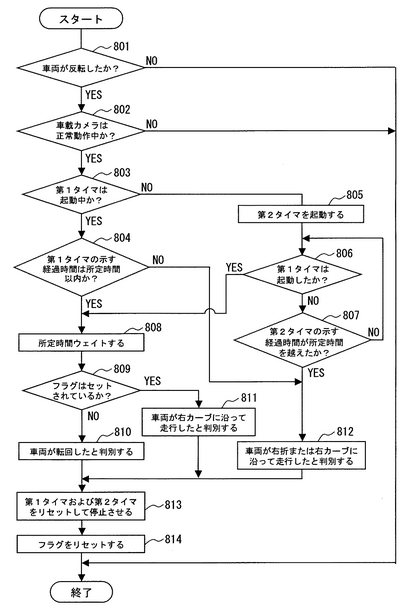
図8は、本実施形態の車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。本フローチャートの処理は、前述した第1の実施形態における図3のフローチャートに加え、所定時間ウェイトするステップ、フラグがセットされているか否かを確認するステップ、車両が右カーブに沿って走行したと判別するステップ、フラグをリセットするステップを設ける。言い換えれば、ステップ808〜809、811、813以外の全ての処理は、前述した図3のフローチャートの処理と同様であるため、説明を省略する。
【0089】
ステップ808では、ECU8は、所定時間ウェイトする。ステップ809では、フラグがセットされているか否かを判定する。フラグがセットされている場合は、ステップ811へ進み、車両が右カーブに沿って走行したと判別した後、ステップ813へ進む。前述したフラグがセットされていない場合は、ステップ810へ進む。ステップ814では、フラグをリセットする。
【0090】
上述した処理を追加することにより、誤って車両が転回したと判定することを防止できる。なお、第5実施形態では、ステップ705の車線区分線の横断判定において、車線区分線を横断したとの判定を行ったとき、その車線区分線を特定し、その後のステップ705の判定では、特定した車線区分線を再度逆向きに横断したか否かの判定を行う。このような判定を行うことにより、同一の進行方向に複数車線を有する道路においても、車線の転回判定を精度良く行うことができる。
【0091】
前述した各実施形態では、ECU8は第1タイマおよび第2タイマの経過時間に従って、車両が転回したか、または、車両が右折・右カーブに沿って走行したかを判別した。しかしながら、これに限定されるものではなく、例えば車両が車線区分線を横断するとセットされる横断フラグと、車両が反転するとセットされる反転フラグとを設け、横断フラグおよび反転フラグの両方がセットされた場合に、車両が転回(Uターン)したと判別し、いずれか一方がセットされている場合には、車両が右折・右カーブに沿って走行したと判別することとしても良い。また、例えば前述の横断フラグについては、車両が車線区分線を1回横断した場合にセットされ、同一の車線区分線を2回横断した場合にはリセットされるよう構成しても良い。車両が転回(Uターン)を行う場合、車線区分線は1回しか横断されないためである(図9参照)。
【0092】
前述した各実施形態では、本車両転回検出装置は車両用ナビゲーション装置に組み込まれて動作したが、これに限定されるものではなく、車両の転回(Uターン)を判別して動作する装置であれば好適に利用できる。しかしながら、最も好適なのは、車両用ナビゲーション装置に組み込まれて動作した場合であり、車両が転回したのか、それともカーブに沿って走行したのかを確実に認識し、より正確なナビゲーション動作を行うことができる。
【0093】
前述した各実施形態では、本車両転回検出装置は、車両が左側通行を行うことを前提としているが、車両が右側通行を行う場合にも好適に利用できる。この場合、本明細書中の「左側」を「右側」と読み替えるとともに、同明細書中の「右側」を「左側」と読み替えれば良い。
【0094】
前述した各実施形態の車両転回検出装置は、その各々が十分な効果を発揮することができる。しかしながら、これらを組み合わせて用いることにより、さらなる効果を期待することができる。
【図面の簡単な説明】
【0095】
【図1】本発明の第1の実施形態における車両転回検出装置の全体構成を示すブロック図である。
【図2】第1の実施形態における車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。
【図3】第1の実施形態における車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。
【図4】第2の実施形態における車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。
【図5】第3の実施形態における車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。
【図6】第4の実施形態における車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。
【図7】第5の実施形態における車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。
【図8】第5の実施形態における車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。
【図9】車両が転回(Uターン)する場合の走行軌跡の一例を示す図である。
【図10】車両がヘアピンカーブに沿って走行する場合の走行軌跡、および5叉路を鋭角に曲がる場合の走行軌跡の一例を示す図である。
【図11】車両が本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)する場合の走行軌跡の一例を示す図である。
【符号の説明】
【0096】
1…位置検出器
11…地磁気センサ
12…ジャイロスコープ
13…距離センサ
14…GPS受信機
2…地図データ入力器
3…ディスプレイ
4…操作スイッチ
5…リモコン
6…リモコンセンサ
7…車載カメラ
8…ECU
9…スピーカ
10…メモリ
【技術分野】
【0001】
本発明は、車両の転回(Uターン)を検出する車両転回検出装置、および当該装置を備えた車両用ナビゲーション装置に関する。
【背景技術】
【0002】
従来、車両の現在位置および進行方向に従ってナビゲーション動作を行う車両用ナビゲーション装置が公知である。例えば、特許文献1の装置では、車両が走行中の可能性がある道路を選定するとともに、選定された各道路に対して、当該道路を車両が走行中である可能性を数値で示した「確からしさの値」を、それぞれ算出する。この「確からしさの値」は、車両の現在位置と選定された各道路との距離が小さい程、大きな値として算出される。その際、Uターン道路(車両が走行中の道路の対向車線を示す)に関しては、前述の距離が最も小さくなり、算出される「確からしさの値」は大きくなるが、車両がUターンする頻度は低いため、算出される「確からしさの値」から所定値を減算する。こうして「確からしさの値」が最も高い道路を、車両が走行中の道路であると判別し、ナビゲーション動作を行う。
【特許文献1】特開平10−9883号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、従来装置では、Uターン道路については、算出された「確からしさの値」から所定値を減算するのみであり、他の道路の「確からしさの値」によっては、車両がUターン道路を走行中である(車両がUターンした)にも関わらず、他の道路を走行中であると誤判別される場合がある。
【0004】
本発明は、上記の問題に鑑みてなされたものであり、車両が走行中の道路を転回(Uターン)したことを確実に判別可能な車両転回検出装置、および当該装置を備えたナビゲーション装置の提供を目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、請求項1に記載の車両転回検出装置では、車両が走行中の道路に標示された車線区分線を、当該車両が横断したことを検出する横断検出手段と、車両の進行方向が反転したことを検出する反転検出手段と、反転検出手段および横断検出手段によって、車両が進行方向を反転し、かつ、車線区分線を横断したことが検出された場合に、車両が転回したと判定する判定手段とを備えることを特徴とする。
【0006】
車両が転回(Uターン)する場合、基本的に、当該車両は進行方向の反転および車線区分線の横断を行うこととなる(図9参照)。そこで、車両が走行中の道路に標示された車線区分線を当該車両が横断したことを横断検出手段によって検出し、車両の進行方向が反転したことを反転検出手段によって検出する。そして、反転検出手段および横断検出手段によって、車両が進行方向を反転し、かつ、車線区分線を横断したことが検出された場合に、車両が転回したと判定する。これにより、本車両転回検出装置では、車両が走行中の道路を転回(Uターン)したことを確実に判別できるとともに、車両がUターンしたにも関わらず、他の道路を走行中であると誤判別するのを防止できる。
【0007】
請求項2に記載のように、判定手段は、反転検出手段が車両の進行方向の反転を検出したが、横断検出手段が車両による車線区分線の横断を検出しなかった場合、車両がカーブに沿って走行したと判定することが望ましい。反転検出手段が車両の進行方向の反転を検出したが、横断検出手段が車両による車線区分線の横断を検出しなかった場合、車両は、例えばヘアピンカーブ等のカーブに沿って走行したり、例えば5叉路や6叉路を鋭角に曲がったと考えられるためである(図10参照)。
【0008】
請求項3に記載のように、判定手段は、反転手段が車両の進行方向の反転を検出し、かつ、横断検出手段によって、車両が同一の車線区分線を2回横断したことを検出した場合には、車両はカーブに沿って走行したと判定することが望ましい。車両が同一の車線区分線を2回横断した場合、当該車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)し、その後に再び車線区分線を横断して、元の車線に戻って走行していると考えられるためである。
【0009】
請求項4に記載のように、横断検出手段は、車両が走行中の道路の路面を撮影する撮影手段を有し、撮影手段が撮影した撮影画像から、車両が車線区分線を横断したことを検出することが望ましい。これにより、車両が車線区分線を横断したことを確実に検出することができる。
【0010】
請求項5に記載のように、横断検出手段は、撮影手段の撮影方向が車両の進行方向を基準とする所定方向に向いている場合に、横断検出動作を行うことが望ましい。これにより、車両が車線区分線を横断したことを、より確実に検出することができる。
【0011】
請求項6に記載のように、判定手段は、車両が車線区分線を横断した場合であっても、撮影手段が撮影した撮影画像において、車線区分線が、車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、車両はカーブに沿って走行したと判定することが望ましい。このような場合、車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)中であり、その後に再び車線区分線を横断し、元の車線に戻って走行すると考えられるためである(図11参照)。
【0012】
請求項7に記載のように、車両の現在位置を検出する位置検出手段と、地図データを記憶する地図データ記憶手段とを設け、判定手段は、位置検出手段の検出結果及び地図データ記憶手段に記憶された地図データから、車両が道路以外の場所を走行中であるとみなされる場合には、判定動作を中止することが望ましい。例えば駐車場等、車両が道路以外の場所を走行中である場合には、当該車両が車線区分線を横断することはない。車両が道路以外の場所を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0013】
請求項8に記載のように、判定手段は、位置検出手段の検出結果および地図データ記憶手段に記憶された地図データから、車両が交差点近傍を走行中であるとみなされる場合には、判定動作を中止することが望ましい。車両が交差点近傍を走行中の場合、当該車両が転回を行う可能性は低い。車両が交差点近傍を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0014】
請求項9に記載のように、判定手段は、車両のイグニッションスイッチがオフである場合には、判定動作を中止することが望ましい。例えばターンテーブルによって車両の進行方向を反転した場合や、車両がフェリーに搭載されて移動されている場合等、車両のイグニッションスイッチがオフ(車両が起動していない状態)であって進行方向が反転した場合には、当該車両が車線区分線を横断することはない。このような場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0015】
請求項10に記載のように、車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置は、車両転回検出装置を備え、当該装置の判定結果に従ってナビゲーション動作を行うことが望ましい。これにより、本車両用ナビゲーション装置は、車両が転回したのか、それともカーブに沿って走行したのかを、車両転回検出装置の判定結果から認識でき、より正確なナビゲーション動作を行うことができる。
【0016】
請求項11に記載の車両転回検出装置では、車両が走行中の道路に標示された車線区分線を、当該車両が横断したことを検出する横断検出手段と、車両の進行方向が反転したことを検出する反転検出手段と、反転検出手段および横断検出手段によって、所定時間範囲内において、車両が進行方向の反転と車線区分線の横断とを行ったことが検出された場合に、車両が転回したと判定する判定手段とを備えることを特徴とする。
【0017】
車両が転回(Uターン)する場合、当該車両は所定時間範囲内に、進行方向の反転と車線区分線の横断とを両方行うこととなる(図9参照)。そこで、車両が走行中の道路に標示された車線区分線を当該車両が横断したことを横断検出手段によって検出し、車両の進行方向が反転したことを反転検出手段によって検出する。そして、反転検出手段および横断検出手段によって、所定時間範囲内において、車両が進行方向の反転と車線区分線の横断とを行ったことが検出された場合に、車両が転回したと判定する。これにより、本車両転回検出装置では、車両が走行中の道路を転回(Uターン)したことを確実に判別できるとともに、車両がUターンしたにも関わらず、他の道路を走行中であると誤判別するのを防止できる。
【0018】
請求項12に記載のように、判定手段は、所定時間範囲内において、反転検出手段が車両の進行方向の反転を検出し、かつ、横断検出手段が車両による車線区分線の横断を検出しなかった場合、車両がカーブに沿って走行したと判定することが望ましい。前述した所定時間範囲内に、反転検出手段が車両の進行方向の反転を検出し、かつ、横断検出手段が車両の車線区分線の横断を検出しなかった場合、車両は、例えばヘアピンカーブ等のカーブに沿って走行したり、例えば5叉路や6叉路を鋭角に曲がったと考えられるためである(図10参照)。
【0019】
請求項13に記載のように、判定手段は、横断検出手段によって、所定時間範囲内に車両が同一の車線区分線を2回横断したことを検出した場合には、車両はカーブに沿って走行したと判定することが望ましい。前述した所定時間範囲内に車両が同一の車線区分線を2回横断した場合、当該車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)し、その後に再び車線区分線を横断して、元の車線に戻って走行していると考えられるためである。
【0020】
請求項14に記載のように、横断検出手段は、車両が走行中の道路の路面を撮影する撮影手段を有し、撮影手段が撮影した撮影画像から、車両が車線区分線を横断したことを検出することが望ましい。これにより、車両が車線区分線を横断したことを確実に検出することができる。
【0021】
請求項15に記載のように、横断検出手段は、撮影手段の撮影方向が車両の進行方向を基準とする所定方向に向いている場合に、横断検出動作を行うことが望ましい。これにより、車両が車線区分線を横断したことを、より確実に検出することができる。
【0022】
請求項16に記載のように、判定手段は、車両が車線区分線を横断した場合であっても、撮影手段が撮影した撮影画像において、車線区分線が、車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、車両はカーブに沿って走行したと判定することが望ましい。このような場合、車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)中であり、その後に再び車線区分線を横断し、元の車線に戻って走行すると考えられるためである(図11参照)。
【0023】
請求項17に記載のように、車両の現在位置を検出する位置検出手段と、地図データを記憶する地図データ記憶手段とを設け、判定手段は、位置検出手段の検出結果及び地図データ記憶手段に記憶された地図データから、車両が道路以外の場所を走行中であるとみなされる場合には、判定動作を中止することが望ましい。例えば駐車場等、車両が道路以外の場所を走行中である場合には、当該車両が車線区分線を横断することはない。車両が道路以外の場所を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0024】
請求項18に記載のように、判定手段は、位置検出手段の検出結果および地図データ記憶手段に記憶された地図データから、車両が交差点近傍を走行中であるとみなされる場合には、判定動作を中止することが望ましい。車両が交差点近傍を走行中の場合、当該車両が転回を行う可能性は低い。車両が交差点近傍を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0025】
請求項19に記載のように、判定手段は、車両のイグニッションスイッチがオフである場合には、判定動作を中止することが望ましい。例えばターンテーブルによって車両の進行方向を反転した場合や、車両がフェリーに搭載されて移動されている場合等、車両のイグニッションスイッチがオフ(車両が起動していない状態)であって進行方向が反転した場合には、当該車両が車線区分線を横断することはない。このような場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0026】
請求項20に記載のように、車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置は、車両転回検出装置を備え、当該装置の判定結果に従ってナビゲーション動作を行うことが望ましい。これにより、本車両用ナビゲーション装置は、車両が転回したのか、それともカーブに沿って走行したのかを、車両転回検出装置の判定結果から認識でき、より正確なナビゲーション動作を行うことができる。
【0027】
請求項21に記載の車両転回検出装置では、車両が走行中の道路に標示された車線を、当該車両が横断したことを検出する横断検出手段と、車両の進行方向が反転したことを検出する反転検出手段と、反転検出手段および横断検出手段の検出結果から、車両が進行方向を反転し、かつ、車線区分線を1回横断した場合、車両が転回したと判定する判定手段とを備えることを特徴とする。
【0028】
車両が転回(Uターン)する場合、当該車両は進行方向を反転し、かつ、車線区分線を1回横断することとなる(図9参照)。そこで、車両が走行中の道路に標示された車線区分線を当該車両が横断したことを横断検出手段によって検出し、車両の進行方向が反転したことを反転検出手段によって検出する。そして、反転検出手段および横断検出手段の検出結果から、車両が進行方向を反転し、かつ、車線区分線を1回横断した場合、車両が転回したと判定する。これにより、本車両転回検出装置では、車両が走行中の道路を転回(Uターン)したことを確実に判別できるとともに、車両がUターンしたにも関わらず、他の道路を走行中であると誤判別するのを防止できる。
【0029】
請求項22に記載のように、判定手段は、反転検出手段が車両の進行方向の反転を検出したが、横断検出手段が車両による車線区分線の横断を検出しなかった場合、車両がカーブに沿って走行したと判定することが望ましい。反転検出手段が車両の進行方向の反転を検出したが、横断検出手段が車両による車線区分線の横断を検出しなかった場合、車両は、例えばヘアピンカーブ等のカーブに沿って走行したり、例えば5叉路や6叉路を鋭角に曲がったと考えられるためである(図10参照)。
【0030】
請求項23に記載のように、判定手段は、反転手段が車両の進行方向の反転を検出し、かつ、横断検出手段によって、車両が同一の車線区分線を2回横断したことを検出した場合には、車両はカーブに沿って走行したと判定することが望ましい。車両が進行方向を反転し、かつ、同一の車線区分線を2回横断した場合、当該車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)し、その後に再び車線区分線を横断して、元の車線に戻って走行していると考えられるためである。
【0031】
請求項24に記載のように、横断検出手段は、車両が走行中の道路の路面を撮影する撮影手段を有し、撮影手段が撮影した撮影画像から、車両が車線区分線を横断したことを検出することが望ましい。これにより、車両が車線区分線を横断したことを確実に検出することができる。
【0032】
請求項25に記載のように、横断検出手段は、撮影手段の撮影方向が車両の進行方向を基準とする所定方向に向いている場合に、横断検出動作を行うことが望ましい。これにより、車両が車線区分線を横断したことを、より確実に検出することができる。
【0033】
請求項26に記載のように、判定手段は、車両が車線区分線を横断した場合であっても、撮影手段が撮影した撮影画像において、車線区分線が、車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、車両はカーブに沿って走行したと判定することが望ましい。このような場合、車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)中であり、その後に再び車線区分線を横断し、元の車線に戻って走行すると考えられるためである(図11参照)。
【0034】
請求項27に記載のように、車両の現在位置を検出する位置検出手段と、地図データを記憶する地図データ記憶手段とを設け、判定手段は、位置検出手段の検出結果及び地図データ記憶手段に記憶された地図データから、車両が道路以外の場所を走行中であるとみなされる場合には、判定動作を中止することが望ましい。例えば駐車場等、車両が道路以外の場所を走行中である場合には、当該車両が車線区分線を横断することはない。車両が道路以外の場所を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0035】
請求項28に記載のように、判定手段は、位置検出手段の検出結果および地図データ記憶手段に記憶された地図データから、車両が交差点近傍を走行中であるとみなされる場合には、判定動作を中止することが望ましい。車両が交差点近傍を走行中の場合、当該車両が転回を行う可能性は低い。車両が交差点近傍を走行中であるとみなされる場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0036】
請求項29に記載のように、判定手段は、車両のイグニッションスイッチがオフである場合には、判定動作を中止することが望ましい。例えばターンテーブルによって車両の進行方向を反転した場合や、車両がフェリーに搭載されて移動されている場合等、車両のイグニッションスイッチがオフ(車両が起動していない状態)であって進行方向が反転した場合には、当該車両が車線区分線を横断することはない。このような場合には判定動作を中止することで、判定手段による誤判定を防止できる。
【0037】
請求項30に記載のように、車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置は、車両転回検出装置を備え、当該装置の判定結果に従ってナビゲーション動作を行うことが望ましい。これにより、本車両用ナビゲーション装置は、車両が転回したのか、それともカーブに沿って走行したのかを、車両転回検出装置の判定結果から認識でき、より正確なナビゲーション動作を行うことができる。
【発明を実施するための最良の形態】
【0038】
(第1実施形態)
図1は、本発明の第1の実施形態における車両転回検出装置の全体構成を示すブロック図である。本実施形態の車両転回検出装置は、車両用ナビゲーション装置に組み込まれて動作する。
【0039】
図1に示すように、位置検出器1は、地磁気センサ11、ジャイロスコープ12、距離センサ13、GPS受信機14から構成され、車両の現在位置および進行方向の検出を行う。
【0040】
地磁気センサ11は、例えばパーマロイ等の環状の強磁性体に、これを励磁するための励磁巻線と、方向検出用の直交する2つの検出巻線とが巻かれた構成を持つ。そして、励磁巻線に交流電圧を印加することによって2つの検出巻線に発生する電圧を計測し、これに基づいて車両の進行方向を絶対方位として検出する。
【0041】
ジャイロスコープ12は、例えば水晶振動子を備え、当該振動子を振動させた際に発生する、コリオリ力に基づく振動から、車両のヨー角速度(ヨーレート)を検出する。
【0042】
距離センサ13は、例えば車両に搭載された図示しない車輪や車軸の回転信号に基づいて、車両の移動距離を検出する。
【0043】
GPS受信機14は、人工衛星である図示しないGPS衛星から送信される位置測定用のGPS信号を受信し、車両が現在走行している地点の緯度や経度、高度を検出する。
【0044】
位置検出器1は、前述した4つの機器の検出結果を相互に補間することによって、車両の現在位置および進行方向の検出を行う。もちろん、要求される検出精度によっては、前述の4つの機器を全て備える必要はない。なお、車両の現在位置および進行方向の検出に関しては、ステアリングセンサ等、他のセンサによる検出信号に基づいて行うこととしてもよい。
【0045】
地図データ入力器2は、例えば記憶媒体としてハードディスクを有し、道路情報、車線情報、建造物情報、各地域の住所情報や郵便番号情報などを含む地図データと、地図画像を表示する地図画像データとを記憶する。地図データおよび地図画像データに関しては、CD−ROMやDVD−ROM等に記憶することとしても良い。
【0046】
ディスプレイ3は、車載用の小型ディスプレイであり、地図画像の表示を含む各種ナビゲーション表示を行う。前述の各種ナビゲーション表示に関しては、車載用のヘッドアップディスプレイ等を用いることとしても良い。
【0047】
操作スイッチ4は、複数のメカニカルなスイッチから構成され、各種ナビゲーション動作の開始や終了を指示する。前述の各種ナビゲーション指示に関しては、操作キーを表示する表示パネルと、当該表示パネルに表示された操作キーを押したことを検出するタッチパネルを備えたタッチスイッチによって構成しても良い。また、音声認識を利用して行うこととしても良い。
【0048】
リモコン5は、例えば各種機能スイッチを備えた多機能リモコンであり、リモコンセンサ6を介して、上述した操作スイッチ4とほぼ同様の操作を行うことができる。
【0049】
車載用カメラ7は、例えばCMOSカメラであり、車両が走行中の道路の路面に標示された車線区分線を撮影して画像データを生成する。この車載用カメラ7は、初期位置として、車両の正面前方であって、車両が直進走行しているときに、その走行中の車線の車線区分線を撮影可能に車両に取り付けられる。また、車載用カメラ7は、図示しないモータによって撮影方向を変更できるよう構成されている。具体的には、地磁気センサ11やジャイロスコープ12等によって検出される進行方向を向くように、撮影方向が制御される。車載用カメラ7の撮影方向が変更されるたびに、当該変更を行った際のモータの回転数が図示しない内部メモリに累積的に記憶され、内部メモリに記憶された回転数から、当該カメラの撮影方向が把握可能となっている。なお、前述した車線区分線の撮影に関しては、車載用のCCDカメラ等を用いることとしても良い。
【0050】
ECU8は、ナビゲーション用ECUであり、操作スイッチ4またはリモコン5からの指示に従って、地図画像表示を含む各種ナビゲーション動作を実行する。具体的には、ECU8は、位置検出器1が検出した車両の現在位置および進行方向に基づいて、地図データ入力器2から車両の現在位置周辺の地図画像データを読み出し、車両の現在位置を示すマークを重畳した地図画像をディスプレイ3に表示させるとともに、スピーカ9から各種音声案内を行わせる。また、ECU8は、目的地までの移動経路を設定してディスプレイ3に表示された地図画像に重畳表示することも行う。
【0051】
さらに、ECU8は、図示しない2つの内部タイマ(第1タイマおよび第2タイマ)を有し、位置検出器1の検出結果から認識される車両の反転、および、車載用カメラ7が生成した画像データに従って、車両が転回(Uターン)したことを判別することも行う。なお、本ECU8は位置検出器1の検出結果から、車両の進行方向が180°±(10°〜20°)変化した場合に、車両が反転したと認識する。
【0052】
メモリ10は、ECU8が各種動作を行う際の一時的な記憶領域として利用される。前述の記憶領域に関しては、例えばメモリカード等を利用することとしても良い。
【0053】
図2は、本実施形態の車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。本フローチャートの処理は、所定時間毎に実行される。
【0054】
ステップ201では、ECU8は、車載用カメラ7が接続されているか否かを確認する。車載用カメラ7の接続が確認された場合は、ステップ202へ進む。確認されなかった場合は、処理を終了する。
【0055】
ステップ202では、車載用カメラ7は正常動作中であるか否かを確認する。前述の正常動作中とは、車載用カメラ7から画像データを取得可能であり、かつ、車載用カメラ7の撮影方向が車両の進行方向を基準とする所定方向に向いていることをいう。車載用カメラ7が正常動作中であることが確認された場合は、ステップ203へ進む。確認されなかった場合は、処理を終了する。
【0056】
ステップ203では、車載用カメラ7から画像データを取得する。ステップ204では、ステップ203で取得した画像データに画像認識処理を施し、画像上における車線区分線の位置を認識する。上述したステップ201〜204の処理により、車両が車線区分線を横断したことを確実に検出できるのである。
【0057】
ステップ205では、ステップ204で認識された車線区分線の位置から、車両が車線区分線を横断するよう走行したか否かを判定する。車両が車線区分線を横断するよう走行した場合は、ステップ206へ進む。そうでない場合は、処理を終了する。
【0058】
ステップ206では、位置検出器1の検出結果および地図データ入力器2に記憶された地図データから、車両が道路上を走行中であるか否かを判定する。例えば駐車場等、車両が道路以外の場所を走行中である場合には、当該車両が車線区分線を横断することはなく、第1タイマを起動しないようにして誤動作を防止するためである。車両が道路上を走行中である場合は、ステップ207へ進む。そうでない場合は、処理を終了する。
【0059】
ステップ207では、第1タイマを起動して経過時間のカウントを開始する。本実施形態では、この第1タイマの起動によって、車両が車線区分線を横断したこと、および横断時点からの経過時間のカウントを行う。
【0060】
図3は、本実施形態の車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。本フローチャートの処理は、所定時間毎に実行される。
【0061】
ステップ301では、ECU8は、位置検出器1が検出した車両の進行方向から、当該車両が反転したか否かを判定する。車両が反転したと判定された場合は、ステップ302へ進む。そうでない場合は、処理を終了する。
【0062】
ステップ302では、ECU8は、車載用カメラ7が正常動作中であるか否かを確認する。車載用カメラ7が正常動作中であることが確認された場合は、ステップ303へ進む。確認されなかった場合は、処理を終了する。
【0063】
ステップ303では、第1タイマが起動中であるか否かを確認する。第1タイマが起動中である場合は、ステップ304へ進む。第1タイマが起動していない場合は、ステップ305へ進む。
【0064】
ステップ304では、第1タイマの示す経過時間が所定時間以内であるか否かを判定する。本ステップは、車両が車線区分線を横断した後、所定時間以内に車両が反転したか否かを判定するものである。第1タイマの示す経過時間が所定時間以内である場合は、ステップ308へ進む。そうでない場合は、ステップ309へ進む。
【0065】
ステップ305では、第2タイマを起動して経過時間のカウントを開始する。ステップ306では、第1タイマが起動したか否かを確認する。第1タイマの起動を確認した場合は、ステップ308へ進む。第1タイマの起動を確認できない場合は、ステップ307へ進む。ステップ307では、第2タイマの示す経過時間が所定時間を超えたか否かを判定する。所定時間を超えた場合は、ステップ309へ進む。未だ所定時間を超えない場合は、ステップ306へ戻り、上述の判定を繰り返す。なお、ステップ306〜307は、車両が反転した時点から所定時間が経過するまでの間に、車両が車線区分線を横断したか否かを判定する処理である。
【0066】
ステップ308では、車両が転回(Uターン)したと判別し、ステップ310へ進む。一方、ステップ309では、車両が右折した、または右カーブに沿って走行したと判別し、ステップ310へ進む。第1タイマの示す経過時間が所定時間を超えている場合や、第2タイマを起動した後、当該タイマの示す経過時間が所定時間を超えるまでに第1タイマの起動を確認できない場合、車両は、例えばヘアピンカーブ等のカーブに沿って走行したり、例えば5叉路や6叉路を鋭角に曲がったりしたと考えられるためである(図10参照)。ステップ310では、第1タイマおよび第2タイマをリセットして停止させ、処理を終了する。
【0067】
このように、本実施形態の車両転回検出装置では、ECU8は、車両が車線区分線を横断すると第1タイマを起動する。車両が反転した際、第1タイマが起動中であって当該タイマの示す経過時間が所定時間以内である場合や、第2タイマの示す経過時間が所定時間以内であって第1タイマの起動が確認された場合、すなわち、所定時間範囲内において、車両が進行方向の反転と車線区分線の横断とを両方行った場合に、車両が転回(Uターン)したと判別する。これにより、本車両転回検出装置では、車両が走行中の道路を転回(Uターン)したことを確実に判別できるとともに、車両がUターンしたにも関わらず、他の道路を走行中であると誤判別するのを防止できる。
【0068】
(第2実施形態)
次に、本発明の第2の実施形態について説明する。前述した第1の実施形態では、車両が道路上を走行中であって、車線区分線を横断した場合に、第1タイマの起動を行った。しかしながら、本実施形態では、車両が道路上を走行中であって、車線区分線を横断した場合でも、車両のイグニッションスイッチ(以下、IGスイッチとする)がオフである場合には、第1タイマの起動を行わない。上述した点が、本実施形態のポイントである。
【0069】
その他の構成・動作は、前述した第1の実施形態の場合と同様であるため、説明を省略する。
【0070】
図4は、本実施形態の車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。本フローチャートの処理は、前述した第1の実施形態における図2のフローチャートに加え、IGスイッチがオフであるか否かを確認するステップを設ける。言い換えれば、ステップ407以外の全ての処理は、前述した図2のフローチャートの処理と同様であるため、説明を省略する。
【0071】
ステップ407では、ECU8は、IGスイッチがオフであるか否かを確認する。IGスイッチがオフでない場合は、ステップ408へ進む。IGスイッチがオフである場合には、処理を終了する。
【0072】
このように、本実施形態の車両転回検出装置では、ECU8は、車両のIGスイッチがオフである場合には、第1タイマの起動、すなわち、車両の転回の判定動作を行うことを禁止しており、それにより、車両が転回したとの判定が誤ってなされることを防止している。例えば車両がターンテーブルや、フェリー等に搭載されている場合等、進行方向が反転する場合があるが、イグニッションスイッチがOFFであるため、転回の判定動作は禁止される。
【0073】
なお、本実施形態では、IGスイッチがオフである場合に、第1タイマの起動を行わないよう構成した。しかしながら、これに限定されるものではなく、例えば車両のエンジンが停止状態である場合に、第1タイマの起動を行わないよう構成しても良い。また、例えば車両のサイドブレーキが引き込まれている(サイドブレーキが作動中である)場合に、第1タイマの起動を行わないよう構成しても良い。
【0074】
(第3実施形態)
次に、本発明の第3の実施形態について説明する。前述した第1の実施形態では、車両が反転した際、第1タイマが起動中であって当該タイマの示す経過時間が所定時間以内である場合や、第2タイマの示す経過時間が所定時間を超える前に第1タイマが起動した場合に、車両が転回を行ったと判別した。しかしながら、本実施形態では、車両が反転した際、第1タイマの示す経過時間が所定時間以内である場合や、第2タイマの示す経過時間が所定時間を超える前に第1タイマが起動した場合であっても、車載用カメラ7から取得した画像データを調べ、車両の進行方向に対して左側に車線区分線が位置する場合には、車両は右カーブに沿って走行したと判別する。このような場合、車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)中であり、その後に再び車線区分線を横断し、元の車線に戻って走行すると考えられるためである(図11参照)。
【0075】
その他の構成・動作は、前述した第1の実施形態の場合と同様であるため、説明を省略する。
【0076】
図5は、本実施形態の車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。本フローチャートの処理は、前述した第1の実施形態における図3のフローチャートに加え、車載用カメラ7から取得した画像データの示す画像から、車両の進行方向に対して左側に車線区分線が位置するか否かを判定するステップと、車両が右カーブに沿って走行したと判別するステップとを設ける。言い換えれば、ステップ508とステップ510以外の全ての処理は、前述した図3のフローチャートの処理と同様であるため、説明を省略する。
【0077】
ステップ507では、ECU8は、車載用カメラ7から取得した画像データの示す画像から、車両の進行方向に対して左側に車線区分線が位置するか否かを判定する。車両の進行方向に対して左側に車線区分線が位置する場合は、ステップ509へ進み、車両が右カーブに沿って走行したと判別して、ステップ512へ進む。車両の進行方向に対して右側に車線区分線が位置する場合は、ステップ509へ進む。
【0078】
以上の処理を追加することにより、車両がセンターライン(車線区分線)を超えつつ、カーブを走行した場合に、誤って車両が転回したと判定することを防止できる。
【0079】
(第4実施形態)
次に、本発明の第4の実施形態について説明する。前述した第1の実施形態では、車両が道路上を走行中であって、車線区分線を横断した場合に、第1タイマの起動を行った。しかしながら、本実施形態では、車両が道路上を走行中であって、車線区分線を横断した場合でも、車両が交差点付近を走行中であるとみなされる場合には、第1タイマの起動を行わない。上述した点が、本実施形態のポイントである。
【0080】
その他の構成・動作は、前述した第1の実施形態の場合と同様であるため、説明を省略する。
【0081】
図6は、本実施形態の車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。本フローチャートの処理は、前述した第1の実施形態における図2のフローチャートに加え、車両が交差点近傍を走行中か否かを判定するステップを設ける。言い換えれば、ステップ607以外の全ての処理は、前述した図2のフローチャートの処理と同様であるため、説明を省略する。
【0082】
ステップ607では、ECU8は、位置検出器1の検出結果および地図データ入力器2に記憶された地図データから、車両が交差点近傍を走行中であるか否かを判定する。車両が交差点近傍を走行中であると判定された場合は、処理を終了する。そうでない場合は、ステップ608へ進み、第1タイマを起動して処理を終了する。
【0083】
このように、本実施形態の車両転回検出装置では、ECU8は、車両が交差点近傍を走行中であるとみなされる場合には、第1タイマの起動、すなわち、車両の転回の判定動作を行わない。車両が交差点近傍を走行中の場合、当該車両がセンターライン(車線区分線)を跨ぎつつ、転回(Uターン)を行う可能性は低い。このような場合には、車線の横断に基づく転回判定を禁止することにより、車両が転回したにも関わらず、誤って転回していないと判定することを防止できる。
【0084】
(第5実施形態)
次に、本発明の第5の実施形態について説明する。前述した第1の実施形態では、車両が反転した際、第1タイマが起動中であって当該タイマの示す経過時間が所定時間以内である場合には、車両が転回を行ったと判別した。しかしながら、本実施形態では、第1タイマが起動中である場合に車両が再度同一の車線区分線を横断する(すなわち、車両が同一の車線区分線を2回横断する)と、図示しないフラグをセットする。そして、車両が反転した際、第1タイマの示す経過時間が所定時間以内であっても、前述のフラグがセットされている場合には、車両が右カーブに沿って走行したと判別する。所定時間範囲内において、車両が進行方向を反転し、車線区分線を2回横断した場合、車両は本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)し、その後に再び車線区分線を横断して、元の車線に戻って走行していると考えられるためである。
【0085】
その他の構成・動作は、前述した第1の実施形態の場合と同様であるため、説明を省略する。
【0086】
図7は、本実施形態の車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。本フローチャートの処理は、前述した第1の実施形態における図2のフローチャートに加え、第1タイマが起動中か否かを確認するステップ、フラグをセットするステップを設ける。言い換えれば、ステップ707〜708以外の全ての処理は、前述した図2のフローチャートの処理と同様であるため、説明を省略する。
【0087】
ステップ707では、第1タイマが起動中か否かを確認する。第1タイマが起動中である場合は、ステップ708へ進み、フラグをセットして処理を終了する。そうでない場合は、ステップ709へ進み、第1タイマを起動して処理を終了する。
【0088】
図8は、本実施形態の車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。本フローチャートの処理は、前述した第1の実施形態における図3のフローチャートに加え、所定時間ウェイトするステップ、フラグがセットされているか否かを確認するステップ、車両が右カーブに沿って走行したと判別するステップ、フラグをリセットするステップを設ける。言い換えれば、ステップ808〜809、811、813以外の全ての処理は、前述した図3のフローチャートの処理と同様であるため、説明を省略する。
【0089】
ステップ808では、ECU8は、所定時間ウェイトする。ステップ809では、フラグがセットされているか否かを判定する。フラグがセットされている場合は、ステップ811へ進み、車両が右カーブに沿って走行したと判別した後、ステップ813へ進む。前述したフラグがセットされていない場合は、ステップ810へ進む。ステップ814では、フラグをリセットする。
【0090】
上述した処理を追加することにより、誤って車両が転回したと判定することを防止できる。なお、第5実施形態では、ステップ705の車線区分線の横断判定において、車線区分線を横断したとの判定を行ったとき、その車線区分線を特定し、その後のステップ705の判定では、特定した車線区分線を再度逆向きに横断したか否かの判定を行う。このような判定を行うことにより、同一の進行方向に複数車線を有する道路においても、車線の転回判定を精度良く行うことができる。
【0091】
前述した各実施形態では、ECU8は第1タイマおよび第2タイマの経過時間に従って、車両が転回したか、または、車両が右折・右カーブに沿って走行したかを判別した。しかしながら、これに限定されるものではなく、例えば車両が車線区分線を横断するとセットされる横断フラグと、車両が反転するとセットされる反転フラグとを設け、横断フラグおよび反転フラグの両方がセットされた場合に、車両が転回(Uターン)したと判別し、いずれか一方がセットされている場合には、車両が右折・右カーブに沿って走行したと判別することとしても良い。また、例えば前述の横断フラグについては、車両が車線区分線を1回横断した場合にセットされ、同一の車線区分線を2回横断した場合にはリセットされるよう構成しても良い。車両が転回(Uターン)を行う場合、車線区分線は1回しか横断されないためである(図9参照)。
【0092】
前述した各実施形態では、本車両転回検出装置は車両用ナビゲーション装置に組み込まれて動作したが、これに限定されるものではなく、車両の転回(Uターン)を判別して動作する装置であれば好適に利用できる。しかしながら、最も好適なのは、車両用ナビゲーション装置に組み込まれて動作した場合であり、車両が転回したのか、それともカーブに沿って走行したのかを確実に認識し、より正確なナビゲーション動作を行うことができる。
【0093】
前述した各実施形態では、本車両転回検出装置は、車両が左側通行を行うことを前提としているが、車両が右側通行を行う場合にも好適に利用できる。この場合、本明細書中の「左側」を「右側」と読み替えるとともに、同明細書中の「右側」を「左側」と読み替えれば良い。
【0094】
前述した各実施形態の車両転回検出装置は、その各々が十分な効果を発揮することができる。しかしながら、これらを組み合わせて用いることにより、さらなる効果を期待することができる。
【図面の簡単な説明】
【0095】
【図1】本発明の第1の実施形態における車両転回検出装置の全体構成を示すブロック図である。
【図2】第1の実施形態における車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。
【図3】第1の実施形態における車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。
【図4】第2の実施形態における車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。
【図5】第3の実施形態における車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。
【図6】第4の実施形態における車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。
【図7】第5の実施形態における車両転回検出装置において、車両が車線区分線を横断したことを検出する処理に関するフローチャートである。
【図8】第5の実施形態における車両転回検出装置において、車両が転回(Uターン)したことを判別する処理に関するフローチャートである。
【図9】車両が転回(Uターン)する場合の走行軌跡の一例を示す図である。
【図10】車両がヘアピンカーブに沿って走行する場合の走行軌跡、および5叉路を鋭角に曲がる場合の走行軌跡の一例を示す図である。
【図11】車両が本来走行すべき車線の対向車線をカーブに沿って走行(ショートカット)する場合の走行軌跡の一例を示す図である。
【符号の説明】
【0096】
1…位置検出器
11…地磁気センサ
12…ジャイロスコープ
13…距離センサ
14…GPS受信機
2…地図データ入力器
3…ディスプレイ
4…操作スイッチ
5…リモコン
6…リモコンセンサ
7…車載カメラ
8…ECU
9…スピーカ
10…メモリ
【特許請求の範囲】
【請求項1】
車両が走行中の道路に標示された車線区分線を、当該車両が横断したことを検出する横断検出手段と、
前記車両の進行方向が反転したことを検出する反転検出手段と、
前記反転検出手段および前記横断検出手段によって、前記車両が進行方向を反転し、かつ、前記車線区分線を横断したことが検出された場合に、前記車両が転回したと判定する判定手段とを備えることを特徴とする車両転回検出装置。
【請求項2】
前記判定手段は、前記反転検出手段が前記車両の進行方向の反転を検出したが、前記横断検出手段が前記車両による前記車線区分線の横断を検出しなかった場合、前記車両がカーブに沿って走行したと判定することを特徴とする請求項1記載の車両転回検出装置。
【請求項3】
前記判定手段は、前記反転手段が前記車両の進行方向の反転を検出し、かつ、前記横断検出手段によって、前記車両が同一の車線区分線を2回横断したことを検出した場合には、前記車両はカーブに沿って走行したと判定することを特徴とする請求項1または請求項2記載の車両転回検出装置。
【請求項4】
前記横断検出手段は、前記車両が走行中の道路の路面を撮影する撮影手段を有し、
前記撮影手段が撮影した撮影画像から、前記車両が前記車線区分線を横断したことを検出することを特徴とする請求項1から請求項3のいずれかに記載の車両転回検出装置。
【請求項5】
前記横断検出手段は、前記撮影手段の撮影方向が前記車両の進行方向を基準とする所定方向に向いている場合に、前記横断検出動作を行うことを特徴とする請求項4記載の車両転回検出装置。
【請求項6】
前記判定手段は、前記車両が前記車線区分線を横断した場合であっても、前記撮影手段が撮影した撮影画像において、前記車線区分線が、前記車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、前記車両はカーブに沿って走行したと判定することを特徴とする請求項4または請求項5記載の車両転回検出装置。
【請求項7】
前記車両の現在位置を検出する位置検出手段と、
地図データを記憶する地図データ記憶手段とを設け、
前記判定手段は、前記位置検出手段の検出結果及び前記地図データ記憶手段に記憶された地図データから、前記車両が道路以外の場所を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項1から請求項6のいずれかに記載の車両転回検出装置。
【請求項8】
前記判定手段は、前記位置検出手段の検出結果および前記地図データ記憶手段に記憶された地図データから、前記車両が交差点近傍を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項7記載の車両転回検出装置。
【請求項9】
前記判定手段は、前記車両のイグニッションスイッチがオフである場合には、前記判定動作を中止することを特徴とする請求項1から請求項8のいずれかに記載の車両転回検出装置。
【請求項10】
前記車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置であって、
請求項1から請求項9のいずれかに記載の車両転回検出装置を備え、当該装置の判定結果に従って前記ナビゲーション動作を行うことを特徴とする車両用ナビゲーション装置。
【請求項11】
車両が走行中の道路に標示された車線区分線を、当該車両が横断したことを検出する横断検出手段と、
前記車両の進行方向が反転したことを検出する反転検出手段と、
前記反転検出手段および前記横断検出手段によって、所定時間範囲内において、前記車両が進行方向の反転と前記車線区分線の横断とを行ったことが検出された場合に、前記車両が転回したと判定する判定手段とを備えることを特徴とする車両転回検出装置。
【請求項12】
前記判定手段は、前記所定時間範囲内において、前記反転検出手段が前記車両の進行方向の反転を検出し、かつ、前記横断検出手段が前記車両による前記車線区分線の横断を検出しなかった場合、前記車両がカーブに沿って走行したと判定することを特徴とする請求項11記載の車両転回検出装置。
【請求項13】
前記判定手段は、前記横断検出手段によって、前記所定時間範囲内に前記車両が同一の車線区分線を2回横断したことを検出した場合には、前記車両はカーブに沿って走行したと判定することを特徴とする請求項11または請求項12記載の車両転回検出装置。
【請求項14】
前記横断検出手段は、前記車両が走行中の道路の路面を撮影する撮影手段を有し、
前記撮影手段が撮影した撮影画像から、前記車両が前記車線区分線を横断したことを検出することを特徴とする請求項11から請求項13のいずれかに記載の車両転回検出装置。
【請求項15】
前記横断検出手段は、前記撮影手段の撮影方向が前記車両の進行方向を基準とする所定方向に向いている場合に、前記横断検出動作を行うことを特徴とする請求項14記載の車両転回検出装置。
【請求項16】
前記判定手段は、前記車両が前記車線区分線を横断した場合であっても、前記撮影手段が撮影した撮影画像において、前記車線区分線が、前記車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、前記車両はカーブに沿って走行したと判定することを特徴とする請求項14または請求項15記載の車両転回検出装置。
【請求項17】
前記車両の現在位置を検出する位置検出手段と、
地図データを記憶する地図データ記憶手段とを設け、
前記判定手段は、前記位置検出手段の検出結果及び前記地図データ記憶手段に記憶された地図データから、前記車両が道路以外の場所を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項11から請求項16のいずれかに記載の車両転回検出装置。
【請求項18】
前記判定手段は、前記位置検出手段の検出結果および前記地図データ記憶手段に記憶された地図データから、前記車両が交差点近傍を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項17記載の車両転回検出装置。
【請求項19】
前記判定手段は、前記車両のイグニッションスイッチがオフである場合には、前記判定動作を中止することを特徴とする請求項11から請求項18のいずれかに記載の車両転回検出装置。
【請求項20】
前記車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置であって、
請求項11から請求項19のいずれかに記載の車両転回検出装置を備え、当該装置の判定結果に従って前記ナビゲーション動作を行うことを特徴とする車両用ナビゲーション装置。
【請求項21】
車両が走行中の道路に標示された車線を、当該車両が横断したことを検出する横断検出手段と、
前記車両の進行方向が反転したことを検出する反転検出手段と、
前記反転検出手段および前記横断検出手段の検出結果から、前記車両が進行方向を反転し、かつ、前記車線区分線を1回横断した場合、前記車両が転回したと判定する判定手段とを備えることを特徴とする車両転回検出装置。
【請求項22】
前記判定手段は、前記反転検出手段が前記車両の進行方向の反転を検出したが、前記横断検出手段が前記車両による前記車線区分線の横断を検出しなかった場合、前記車両がカーブに沿って走行したと判定することを特徴とする請求項21記載の車両転回検出装置。
【請求項23】
前記判定手段は、前記反転手段が前記車両の進行方向の反転を検出し、かつ、前記横断検出手段によって、前記車両が同一の車線区分線を2回横断したことを検出した場合には、前記車両はカーブに沿って走行したと判定することを特徴とする請求項21または請求項22記載の車両転回検出装置。
【請求項24】
前記横断検出手段は、前記車両が走行中の道路の路面を撮影する撮影手段を有し、
前記撮影手段が撮影した撮影画像から、前記車両が前記車線区分線を横断したことを検出することを特徴とする請求項21から請求項23のいずれかに記載の車両転回検出装置。
【請求項25】
前記横断検出手段は、前記撮影手段の撮影方向が前記車両の進行方向を基準とする所定方向に向いている場合に、前記横断検出動作を行うことを特徴とする請求項24記載の車両転回検出装置。
【請求項26】
前記判定手段は、前記車両が前記車線区分線を横断した場合であっても、前記撮影手段が撮影した撮影画像において、前記車線区分線が、前記車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、前記車両はカーブに沿って走行したと判定することを特徴とする請求項24または請求項25記載の車両転回検出装置。
【請求項27】
前記車両の現在位置を検出する位置検出手段と、
地図データを記憶する地図データ記憶手段とを設け、
前記判定手段は、前記位置検出手段の検出結果及び前記地図データ記憶手段に記憶された地図データから、前記車両が道路以外の場所を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項21から請求項26のいずれかに記載の車両転回検出装置。
【請求項28】
前記判定手段は、前記位置検出手段の検出結果および前記地図データ記憶手段に記憶された地図データから、前記車両が交差点近傍を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項27記載の車両転回検出装置。
【請求項29】
前記判定手段は、前記車両のイグニッションスイッチがオフである場合には、前記判定動作を中止することを特徴とする請求項21から請求項28のいずれかに記載の車両転回検出装置。
【請求項30】
前記車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置であって、
請求項21から請求項29のいずれかに記載の車両転回検出装置を備え、当該装置の判定結果に従って前記ナビゲーション動作を行うことを特徴とする車両用ナビゲーション装置。
【請求項1】
車両が走行中の道路に標示された車線区分線を、当該車両が横断したことを検出する横断検出手段と、
前記車両の進行方向が反転したことを検出する反転検出手段と、
前記反転検出手段および前記横断検出手段によって、前記車両が進行方向を反転し、かつ、前記車線区分線を横断したことが検出された場合に、前記車両が転回したと判定する判定手段とを備えることを特徴とする車両転回検出装置。
【請求項2】
前記判定手段は、前記反転検出手段が前記車両の進行方向の反転を検出したが、前記横断検出手段が前記車両による前記車線区分線の横断を検出しなかった場合、前記車両がカーブに沿って走行したと判定することを特徴とする請求項1記載の車両転回検出装置。
【請求項3】
前記判定手段は、前記反転手段が前記車両の進行方向の反転を検出し、かつ、前記横断検出手段によって、前記車両が同一の車線区分線を2回横断したことを検出した場合には、前記車両はカーブに沿って走行したと判定することを特徴とする請求項1または請求項2記載の車両転回検出装置。
【請求項4】
前記横断検出手段は、前記車両が走行中の道路の路面を撮影する撮影手段を有し、
前記撮影手段が撮影した撮影画像から、前記車両が前記車線区分線を横断したことを検出することを特徴とする請求項1から請求項3のいずれかに記載の車両転回検出装置。
【請求項5】
前記横断検出手段は、前記撮影手段の撮影方向が前記車両の進行方向を基準とする所定方向に向いている場合に、前記横断検出動作を行うことを特徴とする請求項4記載の車両転回検出装置。
【請求項6】
前記判定手段は、前記車両が前記車線区分線を横断した場合であっても、前記撮影手段が撮影した撮影画像において、前記車線区分線が、前記車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、前記車両はカーブに沿って走行したと判定することを特徴とする請求項4または請求項5記載の車両転回検出装置。
【請求項7】
前記車両の現在位置を検出する位置検出手段と、
地図データを記憶する地図データ記憶手段とを設け、
前記判定手段は、前記位置検出手段の検出結果及び前記地図データ記憶手段に記憶された地図データから、前記車両が道路以外の場所を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項1から請求項6のいずれかに記載の車両転回検出装置。
【請求項8】
前記判定手段は、前記位置検出手段の検出結果および前記地図データ記憶手段に記憶された地図データから、前記車両が交差点近傍を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項7記載の車両転回検出装置。
【請求項9】
前記判定手段は、前記車両のイグニッションスイッチがオフである場合には、前記判定動作を中止することを特徴とする請求項1から請求項8のいずれかに記載の車両転回検出装置。
【請求項10】
前記車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置であって、
請求項1から請求項9のいずれかに記載の車両転回検出装置を備え、当該装置の判定結果に従って前記ナビゲーション動作を行うことを特徴とする車両用ナビゲーション装置。
【請求項11】
車両が走行中の道路に標示された車線区分線を、当該車両が横断したことを検出する横断検出手段と、
前記車両の進行方向が反転したことを検出する反転検出手段と、
前記反転検出手段および前記横断検出手段によって、所定時間範囲内において、前記車両が進行方向の反転と前記車線区分線の横断とを行ったことが検出された場合に、前記車両が転回したと判定する判定手段とを備えることを特徴とする車両転回検出装置。
【請求項12】
前記判定手段は、前記所定時間範囲内において、前記反転検出手段が前記車両の進行方向の反転を検出し、かつ、前記横断検出手段が前記車両による前記車線区分線の横断を検出しなかった場合、前記車両がカーブに沿って走行したと判定することを特徴とする請求項11記載の車両転回検出装置。
【請求項13】
前記判定手段は、前記横断検出手段によって、前記所定時間範囲内に前記車両が同一の車線区分線を2回横断したことを検出した場合には、前記車両はカーブに沿って走行したと判定することを特徴とする請求項11または請求項12記載の車両転回検出装置。
【請求項14】
前記横断検出手段は、前記車両が走行中の道路の路面を撮影する撮影手段を有し、
前記撮影手段が撮影した撮影画像から、前記車両が前記車線区分線を横断したことを検出することを特徴とする請求項11から請求項13のいずれかに記載の車両転回検出装置。
【請求項15】
前記横断検出手段は、前記撮影手段の撮影方向が前記車両の進行方向を基準とする所定方向に向いている場合に、前記横断検出動作を行うことを特徴とする請求項14記載の車両転回検出装置。
【請求項16】
前記判定手段は、前記車両が前記車線区分線を横断した場合であっても、前記撮影手段が撮影した撮影画像において、前記車線区分線が、前記車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、前記車両はカーブに沿って走行したと判定することを特徴とする請求項14または請求項15記載の車両転回検出装置。
【請求項17】
前記車両の現在位置を検出する位置検出手段と、
地図データを記憶する地図データ記憶手段とを設け、
前記判定手段は、前記位置検出手段の検出結果及び前記地図データ記憶手段に記憶された地図データから、前記車両が道路以外の場所を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項11から請求項16のいずれかに記載の車両転回検出装置。
【請求項18】
前記判定手段は、前記位置検出手段の検出結果および前記地図データ記憶手段に記憶された地図データから、前記車両が交差点近傍を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項17記載の車両転回検出装置。
【請求項19】
前記判定手段は、前記車両のイグニッションスイッチがオフである場合には、前記判定動作を中止することを特徴とする請求項11から請求項18のいずれかに記載の車両転回検出装置。
【請求項20】
前記車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置であって、
請求項11から請求項19のいずれかに記載の車両転回検出装置を備え、当該装置の判定結果に従って前記ナビゲーション動作を行うことを特徴とする車両用ナビゲーション装置。
【請求項21】
車両が走行中の道路に標示された車線を、当該車両が横断したことを検出する横断検出手段と、
前記車両の進行方向が反転したことを検出する反転検出手段と、
前記反転検出手段および前記横断検出手段の検出結果から、前記車両が進行方向を反転し、かつ、前記車線区分線を1回横断した場合、前記車両が転回したと判定する判定手段とを備えることを特徴とする車両転回検出装置。
【請求項22】
前記判定手段は、前記反転検出手段が前記車両の進行方向の反転を検出したが、前記横断検出手段が前記車両による前記車線区分線の横断を検出しなかった場合、前記車両がカーブに沿って走行したと判定することを特徴とする請求項21記載の車両転回検出装置。
【請求項23】
前記判定手段は、前記反転手段が前記車両の進行方向の反転を検出し、かつ、前記横断検出手段によって、前記車両が同一の車線区分線を2回横断したことを検出した場合には、前記車両はカーブに沿って走行したと判定することを特徴とする請求項21または請求項22記載の車両転回検出装置。
【請求項24】
前記横断検出手段は、前記車両が走行中の道路の路面を撮影する撮影手段を有し、
前記撮影手段が撮影した撮影画像から、前記車両が前記車線区分線を横断したことを検出することを特徴とする請求項21から請求項23のいずれかに記載の車両転回検出装置。
【請求項25】
前記横断検出手段は、前記撮影手段の撮影方向が前記車両の進行方向を基準とする所定方向に向いている場合に、前記横断検出動作を行うことを特徴とする請求項24記載の車両転回検出装置。
【請求項26】
前記判定手段は、前記車両が前記車線区分線を横断した場合であっても、前記撮影手段が撮影した撮影画像において、前記車線区分線が、前記車両に対して本来位置すべきサイドとは逆のサイドに位置する場合、前記車両はカーブに沿って走行したと判定することを特徴とする請求項24または請求項25記載の車両転回検出装置。
【請求項27】
前記車両の現在位置を検出する位置検出手段と、
地図データを記憶する地図データ記憶手段とを設け、
前記判定手段は、前記位置検出手段の検出結果及び前記地図データ記憶手段に記憶された地図データから、前記車両が道路以外の場所を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項21から請求項26のいずれかに記載の車両転回検出装置。
【請求項28】
前記判定手段は、前記位置検出手段の検出結果および前記地図データ記憶手段に記憶された地図データから、前記車両が交差点近傍を走行中であるとみなされる場合には、前記判定動作を中止することを特徴とする請求項27記載の車両転回検出装置。
【請求項29】
前記判定手段は、前記車両のイグニッションスイッチがオフである場合には、前記判定動作を中止することを特徴とする請求項21から請求項28のいずれかに記載の車両転回検出装置。
【請求項30】
前記車両の現在位置および進行方向に基づいてナビゲーション動作を行う車両用ナビゲーション装置であって、
請求項21から請求項29のいずれかに記載の車両転回検出装置を備え、当該装置の判定結果に従って前記ナビゲーション動作を行うことを特徴とする車両用ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2006−344164(P2006−344164A)
【公開日】平成18年12月21日(2006.12.21)
【国際特許分類】
【出願番号】特願2005−171510(P2005−171510)
【出願日】平成17年6月10日(2005.6.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年12月21日(2006.12.21)
【国際特許分類】
【出願日】平成17年6月10日(2005.6.10)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]