
車両逆走検出装置
【課題】自車両の位置情報に誤差が含まれる場合において、運転手に対し誤って警告情報を報知する可能性を低減する。
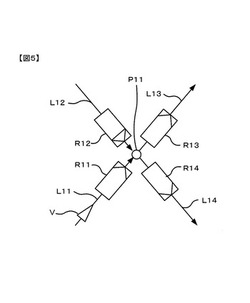
【解決手段】一方通行の道路を自車両Vが走行しているときに自車両Vが道路の分岐点P11に近づいた場合、分岐点P11から延びる道路L11〜L14に道路領域R11〜R14を作成する。分岐点P11に流入する道路であって、自車両Vがいない道路L12には、車両の通行が禁止されている方向に走行していたら逆走していることを報知する道路領域である即時有効判定エリアを作成する。自車両Vが存在し、分岐点P11に流入する道路L11と、分岐点P11から流出する道路L13およびL14とには、自車両Vが通過した後に即時有効判定エリアに変化する通過待ち判定エリアR11、R13、およびR14を作成する。
【解決手段】一方通行の道路を自車両Vが走行しているときに自車両Vが道路の分岐点P11に近づいた場合、分岐点P11から延びる道路L11〜L14に道路領域R11〜R14を作成する。分岐点P11に流入する道路であって、自車両Vがいない道路L12には、車両の通行が禁止されている方向に走行していたら逆走していることを報知する道路領域である即時有効判定エリアを作成する。自車両Vが存在し、分岐点P11に流入する道路L11と、分岐点P11から流出する道路L13およびL14とには、自車両Vが通過した後に即時有効判定エリアに変化する通過待ち判定エリアR11、R13、およびR14を作成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両逆走検出装置に関する。
【背景技術】
【0002】
自車両の位置および走行方向に関する情報と逆走禁止道路の位置および順方向に関する情報とを比較し、車両が逆走禁止道路を順方向とは逆方向に走行している場合や逆走禁止道路の順方向とは逆方向から逆走禁止道路に進入しようとしている場合に運転手に対し警告情報を報知するシステムが知られている。(たとえば、特許文献1)
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−139531号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のシステムは、自車両の位置と逆走禁止道路の位置とを比較することにより自車両が逆走禁止道路を走行しているか否かを判断する構成となっている。このため従来のシステムによれば、自車両の位置情報に誤差が含まれる場合、実際には車両が逆走禁止道路周辺の道路を走行しているのにも係わらず逆走禁止道路を走行していると判断し、運転手に対し誤って警告情報を報知する可能性がある。
【課題を解決するための手段】
【0005】
本発明による車両逆走検出装置は、自車両の位置を検出する自車位置検出手段と、自車両の走行方向を検出する走行方向検出手段と、道路の進行方向が一方向のみ設定されている一方向通行道路を少なくとも含む複数の道路が接続されている接続点の位置情報を含む地図情報を記憶する地図情報記憶手段と、地図情報記憶手段が記憶している地図情報に基づいて、走行方向検出手段が検出した自車両の走行方向の前方にある接続点を判定ポイントに設定する判定ポイント設定手段と、自車両が一方向通行道路を逆走しているか否かの判定に用いる逆走判定エリアを、判定ポイント設定手段が設定した判定ポイントに接続されている複数の道路のうちいずれか少なくとも一つの道路に対して設定する逆走判定エリア設定手段と、判定ポイントに接続されている一方向通行道路に対して設定されている進行方向と自車両の走行方向とに基づいて、自車両が一方向通行道路を逆走しているか否かを判定する逆走判定手段とを備え、逆走判定エリア設定手段が設定する逆走判定エリアは、自車両の逆走を直ちに判定するための即時有効判定エリアを含み、逆走判定手段は、自車位置検出手段が検出した自車両の位置が即時有効判定エリアの範囲内にあるときに、自車両が一方向通行道路を逆走しているか否かを判定することを特徴とする。
【発明の効果】
【0006】
本発明によれば、車両が走行していない道路を逆走していると誤って判断する可能性が低くなるので、警告情報の誤報知の可能性を低減することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態による車両逆走検出装置の構成を表すブロック図である。
【図2】本発明の一実施形態において、車両の逆走を判定するために作成する道路領域の一例を示す図である。
【図3】本発明の一実施形態において、車両の逆走を判定するために作成する道路領域の一例を示す図である。
【図4】本発明の一実施形態において、車両の逆走を判定する処理を終了するために作成する道路領域の一例を示す図である。
【図5】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法を説明するための図である。
【図6】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法を説明するための図である。
【図7】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法を説明するための図である。
【図8】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する具体例として、有料道路の料金所周辺に作成する場合を説明するための図である。
【図9】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する具体例として、有料道路のジャンクション周辺に作成する場合を説明するための図である。
【図10】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法の例外の一つとして、サービスエリアなどの休憩施設の場合を示す図である。
【図11】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法の例外の一つとして、サービスエリアなどの休憩施設の場合を示す図である。
【図12】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法の例外の一つとして、サービスエリアなどの休憩施設の場合を示す図である。
【図13】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法のフローチャートの一例である。
【図14】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法のフローチャートの一例である。
【図15】本発明の一実施形態で作成された道路領域により逆走を判定する方法のフローチャートの一例である。
【図16】本発明の一実施形態で作成された道路領域により逆走を判定する方法のフローチャートの一例である。
【図17】本発明の一実施形態で作成された道路領域により逆走を判定する方法のフローチャートの一例である。
【図18】本発明の一実施形態で作成された道路領域を削除する方法の一例を説明するための図である。
【図19】本発明の一実施形態で作成された道路領域を削除する方法のフローチャートの一例である。
【発明を実施するための形態】
【0008】
〔経路案内装置の構成〕
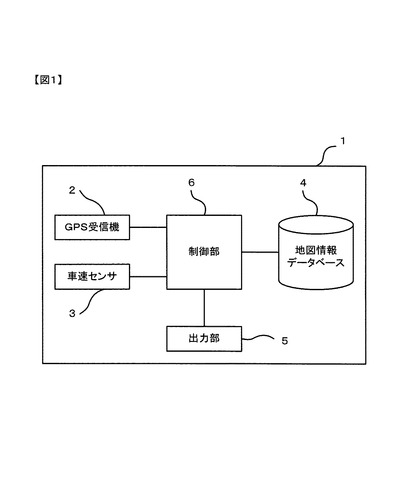
本発明に係る車両逆走検出装置は、地図情報を提示することによりユーザが設定した目的地への走行経路を案内する経路案内装置に適用することができる。本発明の一実施形態である経路案内装置の一例を図1に示す。以下、図1を参照して、本発明の実施形態となる経路案内装置の構成について説明する。
【0009】
本発明の一実施形態である図1の経路案内装置1は、車両に搭載され、GPS(Global Positioning System)受信機2、車速センサ3、地図情報データベース4、出力部5、および制御部6を備える。
【0010】
GPS受信機2は、GPS衛星から発信される電波を利用して車両の位置情報(経度、緯度)を取得し、取得した位置情報を制御部6に出力する。制御部6は、GPS受信機2が制御部6に出力した車両の位置情報の時間変化から車両の走行方向を算出することができる。
【0011】
車速センサ3は、車両の位置情報を取得し、取得した速度情報を制御部6に出力する。なお、車速センサ3は、経路案内装置1の外部にあってもよい。また、GPS受信機2と制御部6によって自車両の速度を検出し、車速センサ3の代替としてもよい。
【0012】
地図情報データベース4は、キャッシュメモリ、メインメモリ、HDD(Hard Disc Drive)、CD(Compact Disc)、MD(Mini Disc)、DVD(Digital Versatile Disc)、光ディスク、FDD(Floppy(登録商標) Disc Drive)等の記憶装置により構成される。地図情報データベース4には、出力部5に地図情報を出力するために必要な情報が記憶されている。たとえば、道路の位置情報や料金所などの場所の情報を示すノード情報、道路の接続状態を示すリンク情報、一般道路や有料道路、サービスエリア内の道路などの道路種別に関する情報、道路のリンク毎の制限速度や通行可能方向、および経路計算を行うために走行距離または平均走行時間等の条件をノード毎にコストと関連付けさせた経路探索用道路ネットワークデータベースなどが記憶されている。また、本実施形態では、地図情報データベース4には、車両が逆走しているか否かを判定するための道路領域である逆走判定エリアの位置情報がノード情報やリンク情報に関連付けて記憶されている。
【0013】
出力部5は、CRT(Cathode Ray Tube)、液晶表示装置、音声出力装置等の公知の出力装置により構成され、制御部6からの指示に従って地図画面情報や警告情報等の各種情報を出力する。
【0014】
制御部6は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等を備えるマイクロコンピュータ等の汎用または専用の情報処理装置により構成され、CPUがROMに記憶されているコンピュータプログラムを実行することにより経路案内装置1全体の動作を制御する。なお、制御部6は、制御部6が実行する各処理を回路動作により実現するASIC(Application Specific Integrated Circuit)やFPGA(Field Programmable Gate Array)等の回路により構成してもよい。
【0015】
このような構成を有する経路案内装置1は、以下に示す逆走判定エリア作成処理、逆走検出処理、および逆走判定エリア削除処理を並列に実行することにより、運転者に対し警告情報を報知し、車両の逆走を抑制する。
【0016】
本発明の実施形態において逆走警告を行う方法について、高速道路などの有料道路における逆走の場合を例として説明する。高速道路などの有料道路は、地図情報データベース4に記憶されている通行可能方向が一方向に規制されている一方通行の道路である。車両の走行方向と有料道路の通行可能方向とが所定の角度以上異なる場合、車両は有料道路を逆走しているものと判定される。
【0017】
逆走判定エリア作成処理は、有料道路上にある所定のノードに自車両が近づいたとき、それらのノードから延びる道路リンクに対して逆走判定エリアを作成する。
【0018】
逆走検出処理は、逆走判定エリア作成処理が作成した逆走判定エリアを用いて車両が逆走しているか否かを判定することにより逆走を検出し、運転手に逆走していることを音声または画像により報知する。
【0019】
逆走判定エリア削除処理は、逆走判定エリアが次々に作成されることにより、制御部6における逆走検出処理の負荷が過大にならないように、自車両から遠く離れた位置にある逆走判定エリアなどを削除する。
【0020】
以下にそれぞれの処理の詳細について説明する。
【0021】
〔逆走判定エリア作成処理〕
本発明の実施形態における逆送判定エリア作成処理の一例について説明する。逆走判定エリア作成処理は、有料道路にある分岐点や、料金所、一般道との接続点などのノードに自車両が近づいたとき、そのノードから延びる道路リンク上に逆走判定エリアを作成する。各道路リンクにおいて、逆走判定エリアは、地図情報データベース4に記憶されている逆走判定エリアの位置情報に対応した場所に作成される。地図情報データベース4に記憶する逆走判定エリアの位置情報は、ノードから道路リンク沿いに所定距離以下離れた場所に設定しておくことが好ましい。作成された逆走判定エリアに関する情報は、制御部6のRAM等に記憶され、逆走判定エリアに関する三つの処理の間で共有される。
【0022】
作成される逆走判定エリアには、即時有効判定エリア、通過待ち判定エリア、判定終了エリアという3種類がある。
【0023】
即時有効判定エリアは、道路リンクの通行可能方向と自車両の走行方向とを比較して自車両が逆走しているか否かを判定するための道路領域である。即時有効判定エリアの役割を図2に示す。図2において、符号R1は即時有効判定エリアを示している。即時有効判定エリアR1は、ノードP1へ流入する道路リンクL1に対して設定されている。符号D1の矢印は、道路リンクL1の通行可能方向である。自車両Vが即時有効判定エリアR1の内部を走行しているとき、自車両Vの走行方向と通行可能方向D1との成す角度が所定の角度以上であるとき、自車両Vが逆走しているものと判定し、所定の報知を行う。所定の角度とは、たとえば135°でよい。
【0024】
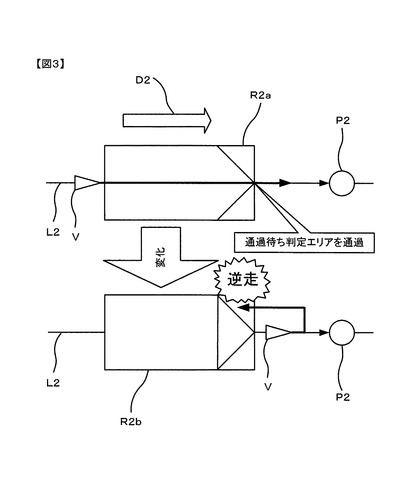
通過待ち判定エリアは、自車両が一度通過すると、前述の即時有効判定エリアに変化する道路領域である。通過待ち判定エリアの役割を図3に示す。図3において、符号R2aは通過待ち判定エリアを示している。通過待ち判定エリアR2aは、ノードP2へ流入する道路リンクL2に対して設定されている。矢印D2は、道路リンクL2の通行可能方向である。自車両Vが通過待ち判定エリアR2aを通過したとき、制御部6は通過待ち判定エリアR2aを即時有効判定エリアR2bに変更する。自車両VがUターン等を行い即時有効判定エリアR2bに進入すると自車両Vは逆走しているものと判定される。
【0025】
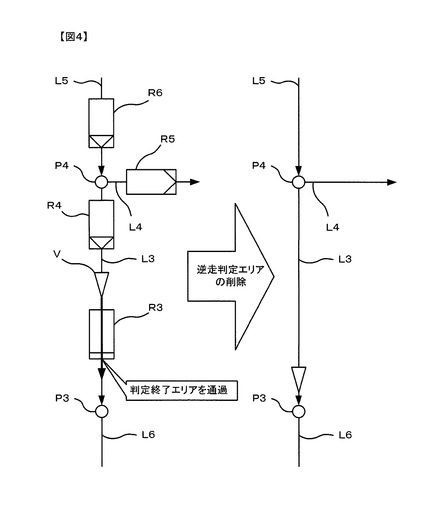
判定終了エリアは、自車両が通過すると、それまでに作成された逆走判定エリアをすべて削除するための道路領域である。たとえば車両が有料道路から一般道路に進入したとき、有料道路における逆走判定を終了するため、有料道路の道路リンク上に作成した逆走判定エリアを削除することに利用できる。判定終了エリアの役割について図4の例を用いて説明する。図4において、符号R3は判定終了エリアを示している。判定終了エリアR3は、ノードP3へ流入する道路リンクL3に対して設定されている。自車両Vの走行方向後方には過去に作成された逆走判定エリアR4〜R6があり、これらが制御部6のRAM等に記憶されている。自車両Vが判定終了エリアR3を通過したとき、逆走判定エリアR3〜R6は削除される。
【0026】
以上で説明した3種類の逆走判定エリアのうち、いずれの逆走判定エリアを作成するかは、制御部6により決定される。その方法の概要を図5、図6、および図7を用いて説明する。
【0027】
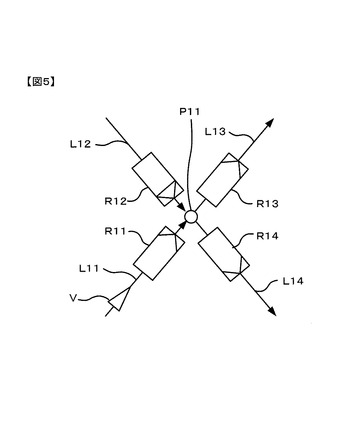
図5は、複数の有料道路の道路リンクL11〜L14が接続している分岐点であるノードP11に道路リンクL11から自車両Vが近づいた場合を示している。分岐点P11には道路リンクL11およびL12が流入している。また、分岐点P11からは道路リンクL13およびL14が流出している。以下では、道路リンクL11のように自車両が走行している道路リンクのことを自車存在リンクと記載する。また、道路リンクL12のように自車両Vが存在せず、分岐点P11に流入する道路リンクのことを流入リンクと記載する。そして、道路リンクL13およびL14のように分岐点P11から流出する道路リンクを流出リンクと記載する。
【0028】
自車両Vが分岐点P11のようなノードに近づいたとき、制御部6は道路リンクL11〜L14の上に作成する逆走判定エリアR11〜R14を図5のように決定する。まず流入リンクL12の上には、即時有効判定エリアR12を作成することに決定する。そして、自車存在リンクL11と、流出リンクL13およびL14にはそれぞれ通過待ち判定エリアR11、R13、およびR14を作成することに決定する。流入リンクL12には即時有効判定エリアR12を作成することにより、自車両Vが自車存在リンクL11から流入リンクL12に誤って進入し、逆走してしまうことを検出できる。また、道路リンクL11、L13、およびL14には、即時有効判定エリアではなく、通過待ち判定エリアR11、R13、およびR14を作成することにより、自車両Vの位置情報の誤差により自車両の走行方向に誤差が生じた場合に自車両Vが逆走していると誤報知する可能性を低減できる。
【0029】
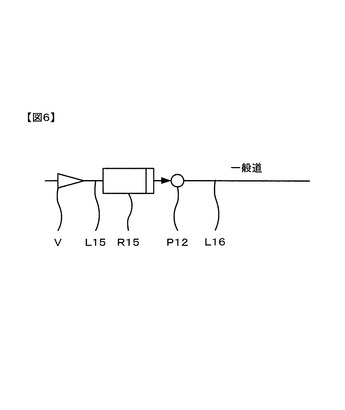
図6は、有料道路の道路リンクL15と一般道の道路リンクL16とを接続するノードである一般道接続ノードP12に自車両Vが道路リンクL15から近づいた場合を示す。一般道接続ノードP12のように一般道の道路リンクと接続されているノードに自車両Vが近づいたとき、制御部6は図6のように自車存在リンクL15に判定終了エリアR15を作成する。一般道の道路リンクL16には、いずれの逆走判定エリアも作成しない。これにより、車両Vが一般道に進行した場合に有料道路における逆走の検出を終了できる。
【0030】
図7は、自車両Vが料金所のあるノードである料金所ノードP13に近づいた場合を示す。料金所ノードP13には有料道路の道路リンクL17とL18とが接続されており、自車両Vは道路リンクL17から料金所ノードP13に近づいている。
【0031】
料金所のあるノードに自車両が近づいたとき、図7に示すように制御部6は料金所ノードP13の自車存在リンクL17に判定終了エリアR17を作成する。料金所ノードP13の流出リンクL18には、逆走判定エリアを作成しない。なお、道路リンクL18が流入するノードが分岐点であった場合には、改めてそのノードに対応した逆走判定エリアが道路リンクL18に作成される。
【0032】
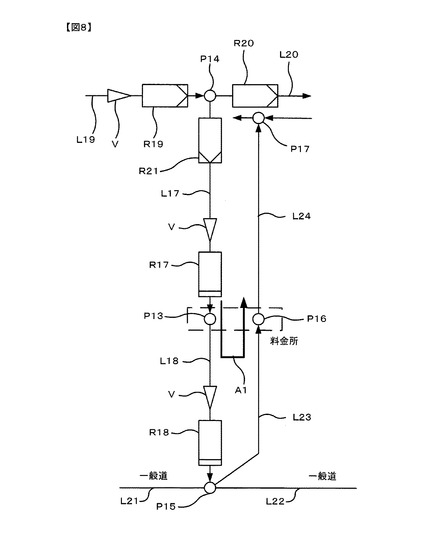
図8は、料金所付近で作成される逆走判定エリアを説明するための図である。図8では、自車両Vが有料道路の道路リンクL19から分岐点P14、料金所ノードP13、および一般道接続ノードP15を通過して一般道に進行する場合を考える。
【0033】
まず、自車両Vが道路リンクL19から分岐点P14に近づいたとき、制御部6は分岐点P14の自車存在リンクL19、流出リンクL20およびL17に通過待ち判定エリアR19、R20、およびR21をそれぞれ作成する。
【0034】
自車両Vが通過待ち判定エリアR19を通過すると通過待ち判定エリアR19は即時有効判定エリアに変更される。自車両Vが分岐点P14を通過し、道路リンクL17に進入すると、通過待ち判定エリアR21に進入する。自車両Vが通過待ち判定エリアR21を通過すると、通過待ち判定エリアR21は即時有効判定エリアに変更される。
【0035】
自車両Vが道路リンクL17を進行して料金所ノードP13に近づくと、前述したとおり制御部6は分岐点P13の自車存在リンクL17に判定終了エリアR17を作成する。判定終了エリアR17を自車両Vが通過したとき、判定終了エリアR17、即時有効判定エリアR19およびR21、ならびに通過待ち判定エリアR20は削除される。
【0036】
自車両Vが料金所ノードP13を通過し、道路リンクL18に進入した後、一般道接続ノードP15に近づくと、自車存在リンクである道路リンクL18に判定終了エリアR18を作成する。そして、判定終了エリアR18を自車両Vが通過したとき判定終了エリアR18を削除する。そして、自車両Vは一般道接続ノードP15を通過し、一般道に進入する。制御部6は、一般道から再び有料道路に進入するまで、逆走判定エリアの作成を行わない。なお、料金所ノードP13と一般道接続ノードP15との間にさらに分岐点が存在した場合、その分岐点で作成された逆走判定エリアは判定終了エリアR18における処理により削除される。
【0037】
図8の矢印A1のように料金所を通過した自車両Vが反対車線に進入する場合が起こりうる。地図データ上では、反対車線の道路リンクやノードは、道路リンクL17や料金所ノードP13とは違う道路リンクおよびノードとして扱われている。図8の例では、道路リンクL24、ノードP16が反対車線に関する道路リンクやノードに相当する。このように自車両Vが道路リンクL17の反対車線L24に進入し、車両の進行が許可されている方向に走行をはじめたとき、料金所ノードP13に通過する前にそれ以前に作成した逆走判定エリア(たとえば、逆走判定エリアR19〜R21)を削除していないと、自車両の位置情報に誤差が生じたとき誤報知が発生することがある。たとえば、道路リンクL24を走行し、ノードP17に進入するとき、自車両Vの位置情報の誤差により逆走判定エリア(即時有効判定エリア)R21の道路領域を進行しているように自車両Vの位置が誤検知されると誤報知が起こりうる。このような誤報知の可能性を低減するために料金所ノードP13に対して自車存在リンクL17に判定終了エリアR17が作成される。
【0038】
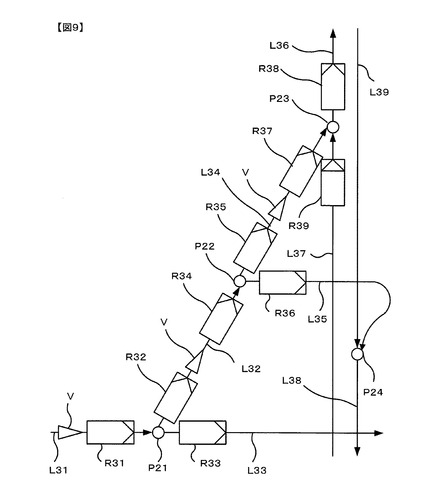
図9は、複数の有料道路が接続するジャンクションの例である。図9のジャンクションには、分岐点であるノードP21〜P24と道路リンクL31〜L39とが存在する。自車両Vは、道路リンクL31から分岐点P21、P22、およびP23を通過し、道路リンクL36に進入しようとしている。
【0039】
自車両Vが道路リンクL31から分岐点P21に近づいたとき、制御部6は分岐点P21に接続されているリンクL31〜L33にそれぞれ逆走判定エリアR31〜R33を作成する。道路リンクL31は、自車存在リンクである。道路リンクL32およびL33は、ノードP21からの流出リンクである。したがって、逆送判定エリアR31〜R33は通過待ち判定エリアである。
【0040】
自車両Vが道路リンクL31から分岐点P21を通過して道路リンクL32に進行すると、通過待ち判定エリアR31およびR32を通過する。制御部6は、自車両Vが通過した通過待ち判定エリアR31およびR32を即時有効判定エリアに変更する。
【0041】
自車両Vが道路リンクL32を進行していくと、分岐点であるノードP22に近づく。このとき、ノードP22に接続されている道路リンクL32、L34、およびL35にそれぞれ逆走判定エリアR34、R35、およびR36を作成する。道路リンクL32は自車存在リンクである。道路リンクL34およびL35は、流出リンクである。したがって、逆走判定エリアR34〜R36は通過待ち判定エリアである。
【0042】
ジャンクションなど複雑に道路が分岐する場所では、複数の分岐点が近い場所にあることが多い。たとえば、ノードP21とP22との位置が近い場合、逆走判定エリアR32とR34とが重なることがあるが、本実施の形態での処理の動作において支障はない。
【0043】
自車両Vが道路リンクL32から分岐点P22を通過して道路リンクL34に進入すると、通過待ち判定エリアR34およびR35を通過する。制御部6は、自車両Vが通過した通過待ち判定エリアR34およびR35を即時有効判定エリアに変更する。
【0044】
自車両Vが道路リンクL34を進行していくと、分岐点であるノードP23に近づく。このとき制御部6は、ノードP23に接続されている道路リンクL34、L36、およびL37にそれぞれ逆走判定エリアR37、R38、およびR39を作成する。道路リンクL34は自車存在リンクである。道路リンクL36は流出リンクである。そして、道路リンクL37は流入リンクである。したがって、作成される逆走判定エリアR37およびR38は通過待ち判定エリアである。そして、逆走判定エリアR39は即時有効判定エリアである。
【0045】
次に、逆走判定エリア作成処理における例外処理について説明する。有料道路には、サービスエリアやパーキングエリアなどの休憩施設が設けられている。サービスエリアなどの休憩施設の駐車場外周にある道路は、走行が許可されている方向が規制されているものがある。しかし、そのような休憩施設内の道路に逆走判定エリアを作成すると、駐車場への駐車行動をしているとき、車両位置の誤差により自車両が逆走していると誤報知してしまうことがある。このようなことを防ぐために休憩施設の分岐点においては、休憩施設に進入または退出するための減速車線および加速車線以外の道路リンクには逆走判定エリアを作成しない。
【0046】
図10から図12は、休憩施設の一例であるサービスエリアにおける逆走判定エリアの作成について説明するための図である。
【0047】
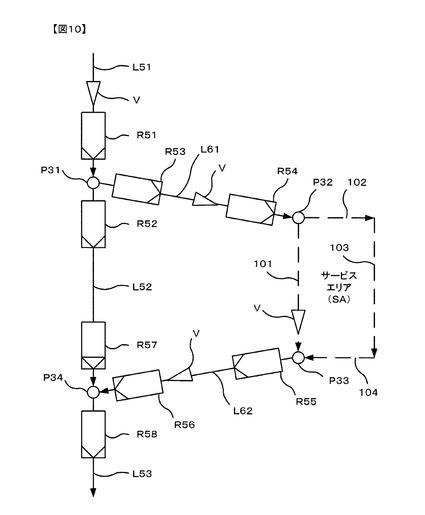
図10から図12に示すサービスエリアには、四つのノードP31〜P34、有料道路の道路リンクL51〜L53、サービスエリア内の道路101〜104、サービスエリアに進入するための減速車線の道路リンクL61、およびサービスエリアから退出するための加速車線の道路リンクL62が存在する。
【0048】
図10の例は、道路リンクL51に存在する自車両Vがサービスエリアに進入する場合と、自車両がサービスエリアから道路リンクL53に退出する場合に作成する逆走判定エリアについて説明するものである。
【0049】
自車両Vは、道路リンクL51の上を走行し、分岐点であるノードP31に近づく。このとき制御部6は、分岐点P31に接続している道路リンクL51、L52、およびL61にそれぞれ逆走判定エリアR51、R52、およびR53を作成する。道路リンクL51は、自車存在リンクである。道路リンクL52およびL61は、ノードP31からの流出リンクである。したがって、作成される逆送判定エリアR51〜R53は通過待ち判定エリアである。
【0050】
自車両Vが道路リンクL51から分岐点P31を通過して道路リンクL61に進入すると、通過待ち判定エリアR51およびR53を通過する。制御部6は、自車両Vが通過した通過待ち判定エリアR51およびR53を即時有効判定エリアに変更する。
【0051】
自車両Vが道路リンクL61を走行すると、サービスエリアの分岐点であるノードP32に近づく。以後、ノードP32のように減速車線とサービスエリアなどの休憩施設を接続するノードを休憩施設進入点と記載する。制御部6は、自車両Vが休憩施設進入点P32に近づくと、休憩施設進入点P32に接続している道路リンクL61に逆走判定エリアR54を作成する。サービスエリア内の道路101および102には逆走判定エリアを作成しない。道路リンクL61は自車存在リンクであるため、逆走判定エリアR54は、通過待ち判定エリアである。
【0052】
自車両Vが、減速車線である道路リンクL61から休憩施設進入点P32を通過してサービスエリアに進入するとき、通過待ち判定エリアR54を通過する。制御部6は、自車両Vが通過した通過待ち判定エリアR54を即時有効判定エリアに変更する。
【0053】
サービスエリア内に進入した自車両Vがサービスエリアから出る場合、サービスエリアとサービスエリアから出るための加速車線の道路リンクL62とを接続するノードP33に近づく。以後、ノードP33のようにサービスエリアなどの休憩施設と加速車線とを接続するノードを休憩施設退出点と記載する。自車両Vが休憩施設退出点P33に近づいたとき、制御部6は加速車線の道路リンクL62に逆走判定エリアR55を作成する。サービスエリア内の道路101および104は休憩施設退出点P33に接続しているが、これらの道路には逆走判定エリアを作成しない。加速車線の道路リンクL62は休憩施設退出点P33の流出リンクであるため、逆走判定エリアR55は通過待ち判定エリアである。
【0054】
サービスエリアから道路リンクL62に進入した自車両Vが通過待ち判定エリアR55を通過すると、制御部6は、通過待ち判定エリアR55を即時有効判定エリアに変更する。
【0055】
自車両Vが加速車線の道路リンクL62を走行すると、分岐点であるノードP34に近づく。自車両Vが分岐点P34に近づくと、制御部6は分岐点P34に接続している道路リンクL62、L52、およびL53にそれぞれ逆走判定エリアR56、R57、およびR58を作成する。加速車線の道路リンクL62は、自車存在リンクである。道路リンクL52は、ノードP34に流入する流入リンクである。道路リンクL53は、ノードP34から流出する流出リンクである。したがって、逆走判定エリアR57は、即時有効判定エリアである。そして、逆走判定エリアR56およびR58は、通過待ち判定エリアである。
【0056】
自車両Vが加速車線である道路リンクL62から分岐点P34を通過して道路リンクL53に進入するとき、自車両Vは通過待ち判定エリアR56およびR58を通過する。制御部6は、自車両Vが通過待ち判定エリアR56およびR58を通過したとき、それらを即時有効判定エリアに変更する。
【0057】
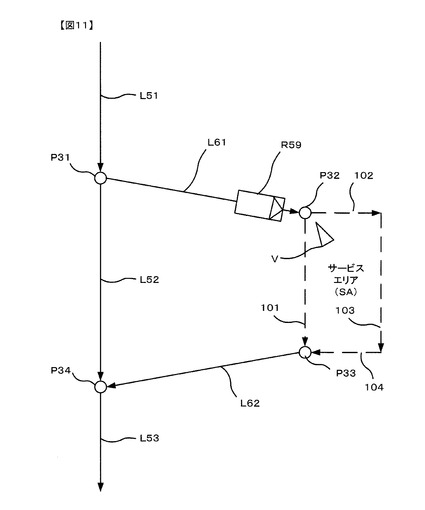
図11は、自車両Vがサービスエリア内から休憩施設進入点P32に近づいた場合の図である。この場合、休憩施設進入点P32の流入リンクである減速車線の道路リンクL61に即時有効判定エリアR59が作成される。そのため、自車両Vが減速車線を逆走することを検出できる。
【0058】
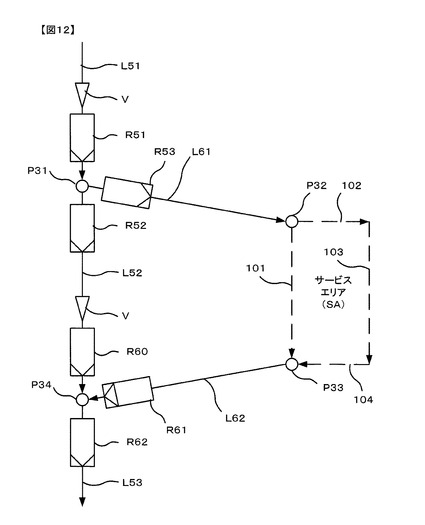
図12は、道路リンクL51から分岐点P31を通過して道路リンクL52に進入した場合である。自車両Vが道路リンクL52に進入し、通過待ち判定エリアR52を通過したとき、制御部6は、通過待ち判定エリアR52を即時有効判定エリアに変更する。そして、分岐点P34に近づいたとき、図12のR60〜R62のように逆走判定エリアを作成する。このとき、道路リンクL52は流入リンクではなく自車存在リンクであるため、逆走判定エリアR60は通過待ち判定エリアである。また、加速車線の道路リンクL62は分岐点P34の流入リンクであるため、逆走判定エリアR56は即時有効判定エリアである。
【0059】
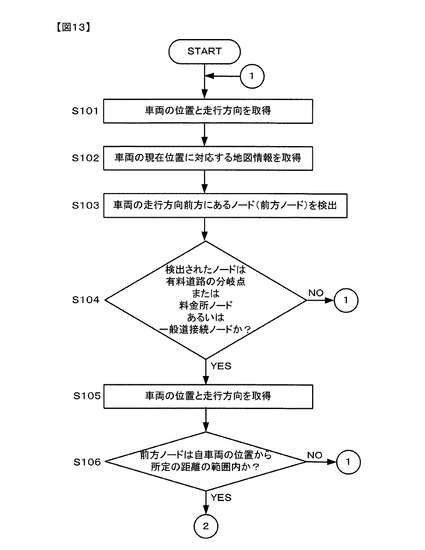
以上説明した逆走判定エリア作成処理のフローチャートを図13および図14に示す。図13および図14のフローチャートの処理は、経路案内装置1の電源がオンになったときに開始される処理であり、制御部6で実行される。
【0060】
ステップS101では、制御部6が、GPS受信機2を介して車両の位置情報と走行方向に関する情報を取得する。これによりステップS101の処理は完了し、ステップS102に進む。
【0061】
ステップS102では、制御部6が、ステップS101の処理により取得した車両の位置情報を利用して車両の現在位置周辺の地図情報を地図情報データベース4から取得する。これにより、ステップS102の処理は完了し、ステップS103に進む。
【0062】
ステップS103では、制御部6が、ステップS101の処理により取得した車両の位置情報および走行方向ならびに地図情報データベース4を利用して、車両が走行方向の前方に進んだときに次に通過するノード(以後、前方ノードと記載する)を検出する。これによりステップS103の処理は完了し、ステップS104に進む。
【0063】
ステップS104では、制御部6が、地図情報データベース4に記憶されている道路種別に関する情報やノード情報、リンク情報などを利用して、ステップS103で検出されたノードが有料道路の分岐点または料金所ノードあるいは一般道接続ノードのいずれかであるか否かを判定する。判定の結果、前方ノードが有料道路の分岐点または料金所ノードあるいは一般道接続ノードのいずれかである場合は、ステップS105に進む。そうでない場合は、ステップ101に戻る。
【0064】
ステップS105では、制御部6が、ステップS101と同様に車両の位置情報と走行方向に関する情報を取得する。これにより、ステップS105の処理は完了し、ステップS106に進む。
【0065】
ステップS106では、制御部6が、地図情報データベース4に記憶されているノード情報とステップS105で取得した車両の位置情報とを利用して、前方ノードが自車両から所定の距離の範囲内であるか否かを判定する。判定の結果、前方ノードが所定の距離の範囲内にあれば、車両が前方ノードに近づいたものとして、図14のステップS111に進む。
【0066】
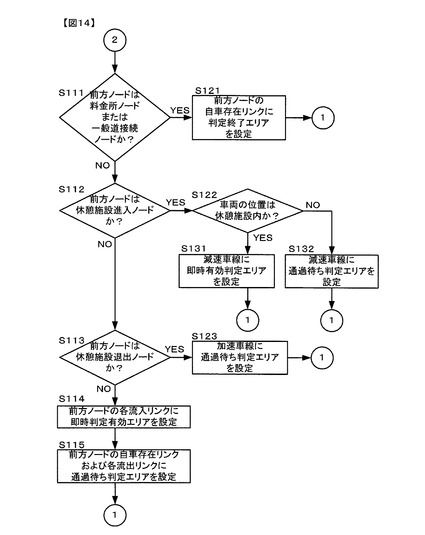
図14のステップS111では、制御部6が、地図情報データベース4に記憶されているノード情報やリンク情報、道路種別に関する情報を利用して前方ノードが料金所ノードまたは一般道接続ノードか否かを判定する。料金所ノードまたは一般道接続ノードであった場合は、ステップS121に進む。前方ノードが料金所ノードでも一般道接続ノードでもない場合は、ステップS112に進む。
【0067】
ステップS121では、制御部6が、図13のステップS105で取得した車両の位置情報と地図情報データベース4に記憶されているリンク情報とに基づいて自車存在リンクを判別する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図6または図7に示すように前方ノードの自車存在リンクに判定終了エリアを設定し、図13のステップS101に戻る。
【0068】
ステップS112では、制御部6が、地図情報データベース4に記憶されているノード情報、リンク情報、および道路種別に関する情報を利用して前方ノードが休憩施設進入ノードか否かを判定する。判定の結果、休憩施設進入ノードであった場合は、ステップS122に進む。休憩施設進入ノードでなかった場合は、ステップS113に進む。
【0069】
ステップS122では、制御部6が、図13のステップS105で取得した車両の位置情報を利用して、自車両の位置が休憩施設内か否かを判定する。判定の結果、自車両の位置が休憩施設内である場合には、ステップS131に進む。自車両の位置が休憩施設外(減速車線上)であった場合には、ステップS132に進む。
【0070】
ステップS131では、制御部6が地図情報データベース4に記憶されている道路種別に関する情報を利用して、休憩施設進入ノードの流入リンクである減速車線の道路リンクを判別する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図11の逆走判定エリアR59のように減速車線の道路リンクに対して即時有効判定エリアを設定する。これにより、ステップS131の処理は完了し、図13のステップS101に戻る。
【0071】
ステップS132では、制御部6が地図情報データベース4に記憶されている道路種別に関する情報を利用して、休憩施設進入ノードの流入リンクである減速車線の道路リンクを判別する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図10の逆走判定エリアR54のように減速車線の道路リンクに対して通過待ち判定エリアを設定する。これにより、ステップS132の処理を完了し、図13のステップS101に戻る。
【0072】
ステップS113では、制御部6が地図情報データベース4に記憶されているノード情報、リンク情報、および道路種別に関する情報を利用して、前方ノードが休憩施設退出ノードか否かを判定する。判定の結果、休憩施設退出ノードであった場合は、ステップS123に進む。休憩施設退出ノードでなかった場合は、ステップS114に進む。
【0073】
ステップS123では、制御部6が地図情報データベース4に記憶されている道路種別に関する情報を利用して、休憩施設退出ノードに接続する加速車線の道路リンクを判別する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図10の逆走判定エリアR55のように加速車線の道路リンクに通過待ち判定エリアを設定する。これによりステップS123の処理を完了し、図13のステップS101に戻る。
【0074】
ステップS114では、前方ノードは有料道路の分岐点であるので、制御部6が図13のステップS105で取得した車両の位置情報と地図情報データベース4に記憶されているリンク情報とを利用して前方ノードの流入リンクを判断する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図5の逆走判定エリアR12のように前方ノードの流入リンクそれぞれに即時有効判定エリアを設定する。これにより、ステップS114の処理を完了し、ステップS115に進む。
【0075】
ステップS115では、制御部6が図13のステップS105で取得した車両の位置情報と地図情報データベース4に記憶されているリンク情報とを利用して前方ノードの自車存在リンクおよび流出リンクを判別する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図5の逆走判定エリアR11、R13、およびR14のように前方ノードの自車存在リンクおよび流出リンクそれぞれに通過待ち判定エリアを設定する。これにより、ステップS115の処理を完了し、図13のステップS101に戻る。
【0076】
以上のフローチャートで示される処理により、自車両が有料道路にいる場合に適切な逆走判定エリアを作成できる。
【0077】
〔逆走検出処理〕
次に本発明の実施形態における逆走検出処理の一例について説明する。本実施の形態における逆走検出処理は、制御部6により実行される。本実施の形態における逆走検出処理は、自車両が逆走判定エリア作成処理により作成された逆走判定エリアの道路領域内に存在したときに図2から4を用いて説明した処理を実行するものである。
【0078】
逆走検出処理について図15から17のフローチャートを用いて説明する。図15から17に示される処理は、経路案内装置1の電源がオンになったときに開始される処理であり、制御部6により実行される。なお、前述したとおり、逆走検出処理は逆走判定エリア作成処理と並列に実行される。
【0079】
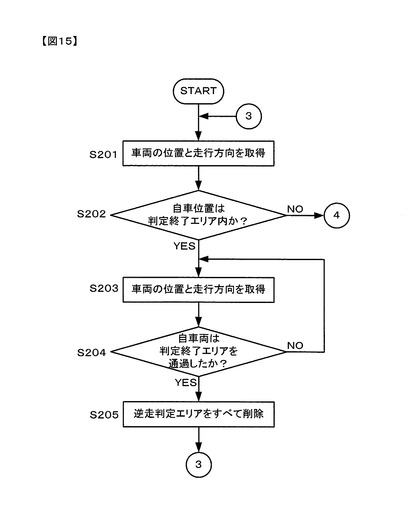
制御部6が逆走検出処理の実行を開始したら、ステップS201の処理を開始する。ステップS201では、制御部6が、GPS受信機2を介して車両の位置情報と走行方向に関する情報を取得する。これによりステップS201の処理は完了し、ステップS202に進む。
【0080】
ステップS202では、制御部6が、ステップS201で取得した車両の位置情報と制御部6のRAM等に記憶された逆走判定エリアに関する情報とを利用して、自車両が判定終了エリア内にあるか否かを判定する。自車両が判定終了エリア内にあると判定されたら、図4で説明した処理を開始するためステップS203に進む。自車両が判定終了エリア内にない場合は、図16のステップS211に進む。
【0081】
ステップS203では、ステップS201と同様に、制御部6が、GPS受信機2を介して車両の位置情報と走行方向に関する情報を取得する。これによりステップS203の処理は完了し、ステップS204に進む。
【0082】
ステップS204では、制御部6がステップS203で取得した車両の位置情報および走行方向を利用して、判定終了エリアを通過したか否かを判定する。制御部6により、自車両が判定終了エリアを通過していないと判定された場合はステップS203に戻し、通過したと判定された場合はステップS205に進む。
【0083】
ステップS205では、制御部6は、逆走判定エリア作成処理により作成された逆走判定エリアをすべて削除し、ステップS201に戻る。
【0084】
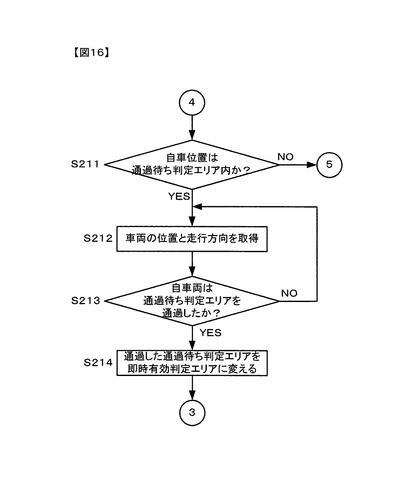
図16のステップS211では、制御部6が、図15のステップS201で取得した車両の位置情報と制御部6のRAM等に記憶された逆走判定エリアに関する情報とを利用して、自車両が通過待ち判定エリア内にあるか否かを判定する。自車両が通過待ち判定エリア内にあると判定されたら、図3で説明した処理を開始するためステップS212に進む。自車両が通過待ち判定エリア内にない場合は、図17のステップS221に進む。
【0085】
ステップS212では、ステップS201と同様に、制御部6が、GPS受信機2を介して車両の位置情報と走行方向に関する情報を取得する。これによりステップS212の処理は完了し、ステップS213に進む。
【0086】
ステップS213では、制御部6がステップS212で取得した車両の位置情報および走行方向を利用して、通過待ち判定エリアを通過したか否かを判定する。制御部6により、自車両が通過待ち判定エリアを通過していないと判定された場合はステップS212に戻し、通過したと判定された場合はステップS214に進む。
【0087】
ステップS214では、制御部6は、自車両が通過した通過待ち判定エリアを即時有効判定エリアに変更し、図15のステップS201に戻る。
【0088】
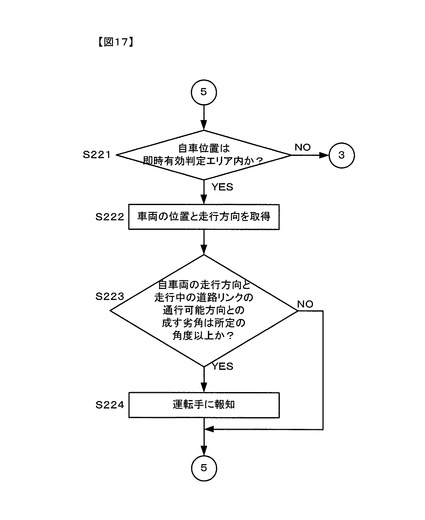
図17のステップS221では、制御部6が、図15のステップS201で取得した車両の位置情報と制御部6のRAM等に記憶された逆走判定エリアに関する情報とを利用して、自車両が即時有効判定エリア内にあるか否かを判定する。自車両が即時有効判定エリア内にあると判定されたら、図2で説明した処理を開始するためステップS222に進む。自車両が即時有効判定エリア内にない場合は、車両が逆走判定エリア内にいないものと判断して図15のステップS201に戻る。
【0089】
ステップS222では、ステップS201と同様に、制御部6が、GPS受信機2を介して車両の位置情報と走行方向に関する情報を取得する。これによりステップS222の処理は完了し、ステップS223に進む。
【0090】
ステップS223では、制御部6が、ステップS222で取得された車両の走行方向と即時有効判定エリアが作成されている道路リンクにおける通行可能方向と成す劣角を算出し、その劣角が所定の角度以上か否かを判定する。2方向の成す劣角が所定の角度以上と判定された場合は、ステップS224に進む。2方向の成す劣角が所定の角度未満と判定された場合は、ステップS221に戻り、まだ自車両が即時有効判定エリア内にいるか否かを判定する。
【0091】
ステップS224では、制御部6が、出力部5を利用して運転手に自車両が道路リンクを逆走していることを画像や音声などを出力することにより報知し、ステップS221に戻る。
【0092】
〔逆走判定エリア削除処理〕
次に本発明の実施形態における逆走判定エリア削除処理の一例について説明する。
【0093】
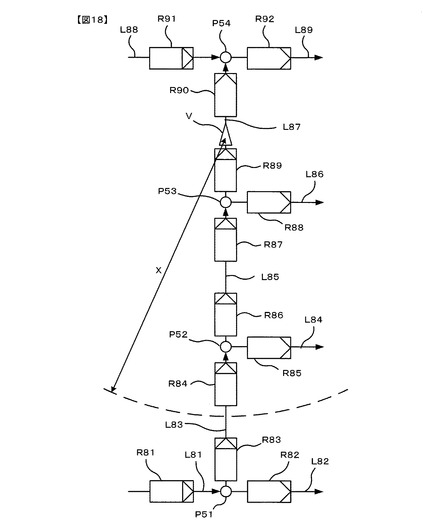
逆走判定エリア削除処理は、逆走判定エリア作成処理が作成した逆走判定エリアのうち、自車両から遠く離れた位置にあるものを削除する。逆走判定エリア削除処理の動作について図18を用いて説明する。
【0094】
図18は、ノードP51〜P54および道路リンクL81〜L89からなる道路地図内を自車両Vが走行している場合の例である。自車両Vは、道路リンクL81から分岐点であるノードP51〜P53を通過し、道路リンクL87を走行しており、分岐点であるノードP54に近づいている。このとき、自車両の走行方向の後方にある道路リンクL81〜L86には逆走判定エリアR81〜R88が作成されている。
【0095】
図18の例では、自車両Vが逆走判定エリアR81〜R83に他の逆走判定エリア(たとえば、逆送判定エリアR87)を通過することなく進入することはない。したがって、逆走判定エリアR81〜R83は削除しても逆走を検出できなくなることはなく、逆走検出処理の動作上問題ない。逆走判定エリア削除処理は、このような削除しても逆走検出処理の動作に問題のない逆走判定エリアを判別し、削除する。逆走判定エリアの削除は、たとえば自車両と逆走判定エリアとの間が所定の距離X以上離れているものを削除することにしてもよいし、自車両がある分岐点(たとえばP53)を通過したときに二つ前の分岐点(たとえばP51)に関連する逆走判定エリア(たとえばR81〜R83)を削除するようにしてもよい。いずれの判別方法であっても、図18の例では逆走判定エリアR81〜R83が削除される。
【0096】
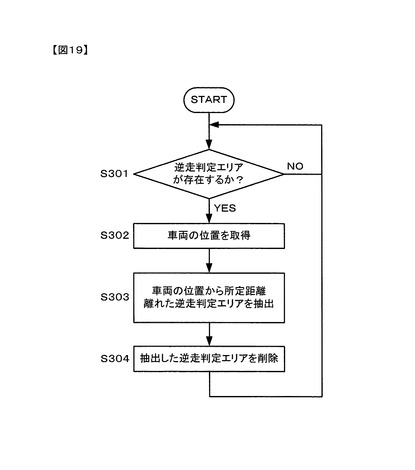
逆走判定エリア削除処理の一例を図19のフローチャートを用いて説明する。図19のフローチャートは、経路案内装置1の電源がオンになったときに開始される処理であり、制御部6により実行される。前述したとおり、逆走判定エリア削除処理は、逆走判定エリア作成処理および逆走検出処理と並列に処理される。
【0097】
制御部6により逆走判定エリア削除処理の実行が開始したら、ステップS301の処理を開始する。ステップS301では、制御部6が制御部6のRAMを利用して、逆走判定エリア作成処理により作成された逆走判定エリアが存在するか否かを判定する。逆走判定エリアが存在すればステップS302に進み、存在しない場合はステップS301に留まる。
【0098】
ステップS302では、制御部6が、GPS受信機2を介して車両の位置情報および走行方向に関する情報を取得する。これによりステップS302の処理は完了し、ステップS303に進む。
【0099】
ステップS303では、制御部6が、ステップS302で取得した車両の位置情報と、制御部6のRAMなどに記憶された各逆走判定エリアの位置座標とを比較し、所定の距離離れているものを抽出する。これによりステップS303の処理は完了し、ステップS304に進む。なお、ステップS303における所定の距離は、図13のステップS106における所定の距離よりも長い必要があり、道路リンクの両端のノード間の距離の最大値よりも長いことが好ましい。
【0100】
ステップS304では、制御部6が、ステップS303で抽出した逆走判定エリアを削除する。これによりステップS304の処理は完了し、ステップS301に戻る。なお、制御部6のRAMなどに記憶していた逆走判定エリアの情報は、削除されたことがわかるように変更することが望ましい。
【0101】
以上説明した実施形態によれば、次の作用効果を奏する。
【0102】
(1)本実施形態の車両逆走検出装置は、制御部6がGPS受信機2を利用して自車両の位置と自車両の走行方向を検出し(図13のステップS101等)、地図情報データベース4などに地図情報を記憶し、制御部6が地図情報に基づいて自車両の走行方向の前方にある自車両の逆走を検出するノードを検出し(図13のステップS103)、検出されたノードから延びる道路上に逆走判定エリアを作成し(図14)、自車両が即時有効判定エリア内にあるとき自車両の走行方向に基づいて自車両が逆走しているか否かを判定する(図15〜17)。これにより、逆走判定エリア内でのみ逆走の判定を行うことにしたので、自車両の位置情報の誤差により車両が走行していない道路を走行していると一時的に判断された場合に逆走していると判断する可能性が低くなり、警告情報の誤報知を低減することができる。
【0103】
(2)本実施形態の車両逆走検出装置では、制御部6は即時有効判定エリア、通過待ち判定エリア、および判定終了エリアという3種類の逆走判定エリアを作成することができる(図2〜図4)。制御部6は、地図情報データベース4に記憶されているノード情報、リンク情報、および道路種別に関する情報と自車両の位置情報とに基づいて、各道路リンクに作成する逆走判定エリアの種類を選択し(図5〜図7、図14のステップS111〜S113、S122)、選択された種類の逆走判定エリアを各道路リンクに作成し(図14のステップS114、S115、S121、S123、S131、およびS132)、作成された逆走判定エリアの内部に自車両が存在する場合に、逆走判定エリアの種類ごとに定められた処理を実行する(図15〜17)。これにより、複数の道路が流入または流出しているノードから延びる道路において、より精密な逆走検出を行うことができる。特に自車存在リンクや流出リンクに通過待ち判定エリアを作成することは、自車両の位置情報の誤差などを原因とした自車両の方位情報の誤差が発生したときに誤報知することを低減できる。
【0104】
(3)本実施形態の車両逆走検出装置では、制御部6は、サービスエリアやパーキングエリアなどの休憩施設の道路リンクには逆走判定エリアを作成しない。これにより、休憩施設の駐車場内を走行しているときなどに誤報知してしまうことを防ぐことができる(図10)。
【0105】
(4)本実施形態の車両逆走検出装置では、制御部6は、自車両が一般道や料金所に近づいたとき、自車両が走行している道路の道路リンクに判定終了エリアを作成し(図14のステップS111、S121)、自車両が作成した判定終了エリアを通過したとき、有料道路における逆走報知判定処理を終了する(図15)。これにより、インターチェンジなどにおいて、料金所を一度通過した後に有料道路に引き返したとき、自車両の位置情報の誤差などにより、反対車線の道路リンクに作成された逆走判定エリア内を逆走していると判定されることを防ぐことができる。
【0106】
(5)本実施形態の車両逆走検出装置では、制御部6は、自車両の位置情報と逆走判定エリアの位置情報とに基づいて、自車両から所定の距離以上離れた逆走判定エリアを削除する(図18、図19)。これにより、有料道路を長時間走行したことにより逆走判定エリアが多く作成され、過大な負荷が制御部6に加わることを防ぐことができる。
【0107】
(6)本実施形態の車両逆走検出装置では、制御部6は、逆走報知処理により自車両が逆走していると判定したとき、出力部5を利用して音声または画像により警告情報を出力することができる(図17のステップS224)。これにより、運転手に対して逆走していることを報知できる。
【0108】
以上の実施の形態は、以下のように変形して実施できる。
【0109】
(1)本実施形態において、図5を用いて自車両Vが流入リンクから走行方向の前方にあるノードP11に近づいた場合について説明した。自車両の位置情報に誤差情報が含まれた場合や運転手が逆走に関する報知に気付かなかった場合などにおいて、自車両Vが流出リンクからノードに近づくことが考えられる。このような場合は、自車両がいる道路リンクに即時有効判定エリアを作成することにしてもよい。
【0110】
(2)本実施形態では、作成した逆走判定エリアを制御部6のRAMに記憶することにしたが、これに限定されない。たとえば、ハードディスクなどの不揮発の記憶装置に記憶することにしてもよい。これにより、自車両を駐車した後再起動した場合に、駐車前に作成した逆走判定エリアを用いて判定を行うことができる。これにより、再起動後に自車両の位置情報の誤差により逆走判定エリアが正しく作成されなかった場合でも駐車前に作成した逆走判定エリアを用いて逆走を検出することができる。たとえば、自車両の位置情報の誤差により図11の逆走判定エリアR59が作成されなかったときに、図10の逆走判定エリアR54が不揮発の記憶装置に残っていれば逆走を検出できる。
【0111】
(3)本実施形態では、自車両が有料道路を走行しているときの逆走検出について説明したが、一般道の一方通行の道路などにも適用してもよい。一方通行の道路に適用する場合は、判定終了エリアは、一方通行でない道路リンクに作成すればよい。
【0112】
(4)本実施形態では、逆走判定エリアを作成する位置などは、地図情報データベース4に記憶されている逆走判定エリアの位置情報に基づくものとしたが、ノード情報やリンク情報などに基づいて算出することにしてもよい。たとえば、前方ノードの位置座標を中心とした円をリンクの延在方向に基づいて分割した扇形としてもよいし、前方ノードから延びるリンクに沿った道路幅よりも幅広の道路領域としてもよい。
【0113】
(5)本実施形態では、有料道路における逆走判定において、一般道には逆走判定エリアを作成しないが、一般道にも作成することにしてもよい。たとえば、一般道接続ノードから延びる一般道の道路リンクに判定終了エリアを作成してもよい。
【0114】
(6)本実施形態では、警告報知を音声または画像によるものとしたが、これらに限定するものではない。運転手の五感で知覚できるものであればよい。
【0115】
(7)本実施形態では、GPS受信機2を利用して自車両の走行方向を取得したが、これに限定されるものではない。たとえば、ジャイロセンサなどを利用して取得してもよい。
【0116】
以上説明した各実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されるものではない。
【符号の説明】
【0117】
1:経路案内装置、
2:GPS受信機、
3:車速センサ、
4:地図情報データベース、
5:出力部、
6:制御部
【技術分野】
【0001】
本発明は、車両逆走検出装置に関する。
【背景技術】
【0002】
自車両の位置および走行方向に関する情報と逆走禁止道路の位置および順方向に関する情報とを比較し、車両が逆走禁止道路を順方向とは逆方向に走行している場合や逆走禁止道路の順方向とは逆方向から逆走禁止道路に進入しようとしている場合に運転手に対し警告情報を報知するシステムが知られている。(たとえば、特許文献1)
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−139531号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来のシステムは、自車両の位置と逆走禁止道路の位置とを比較することにより自車両が逆走禁止道路を走行しているか否かを判断する構成となっている。このため従来のシステムによれば、自車両の位置情報に誤差が含まれる場合、実際には車両が逆走禁止道路周辺の道路を走行しているのにも係わらず逆走禁止道路を走行していると判断し、運転手に対し誤って警告情報を報知する可能性がある。
【課題を解決するための手段】
【0005】
本発明による車両逆走検出装置は、自車両の位置を検出する自車位置検出手段と、自車両の走行方向を検出する走行方向検出手段と、道路の進行方向が一方向のみ設定されている一方向通行道路を少なくとも含む複数の道路が接続されている接続点の位置情報を含む地図情報を記憶する地図情報記憶手段と、地図情報記憶手段が記憶している地図情報に基づいて、走行方向検出手段が検出した自車両の走行方向の前方にある接続点を判定ポイントに設定する判定ポイント設定手段と、自車両が一方向通行道路を逆走しているか否かの判定に用いる逆走判定エリアを、判定ポイント設定手段が設定した判定ポイントに接続されている複数の道路のうちいずれか少なくとも一つの道路に対して設定する逆走判定エリア設定手段と、判定ポイントに接続されている一方向通行道路に対して設定されている進行方向と自車両の走行方向とに基づいて、自車両が一方向通行道路を逆走しているか否かを判定する逆走判定手段とを備え、逆走判定エリア設定手段が設定する逆走判定エリアは、自車両の逆走を直ちに判定するための即時有効判定エリアを含み、逆走判定手段は、自車位置検出手段が検出した自車両の位置が即時有効判定エリアの範囲内にあるときに、自車両が一方向通行道路を逆走しているか否かを判定することを特徴とする。
【発明の効果】
【0006】
本発明によれば、車両が走行していない道路を逆走していると誤って判断する可能性が低くなるので、警告情報の誤報知の可能性を低減することができる。
【図面の簡単な説明】
【0007】
【図1】本発明の一実施形態による車両逆走検出装置の構成を表すブロック図である。
【図2】本発明の一実施形態において、車両の逆走を判定するために作成する道路領域の一例を示す図である。
【図3】本発明の一実施形態において、車両の逆走を判定するために作成する道路領域の一例を示す図である。
【図4】本発明の一実施形態において、車両の逆走を判定する処理を終了するために作成する道路領域の一例を示す図である。
【図5】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法を説明するための図である。
【図6】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法を説明するための図である。
【図7】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法を説明するための図である。
【図8】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する具体例として、有料道路の料金所周辺に作成する場合を説明するための図である。
【図9】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する具体例として、有料道路のジャンクション周辺に作成する場合を説明するための図である。
【図10】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法の例外の一つとして、サービスエリアなどの休憩施設の場合を示す図である。
【図11】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法の例外の一つとして、サービスエリアなどの休憩施設の場合を示す図である。
【図12】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法の例外の一つとして、サービスエリアなどの休憩施設の場合を示す図である。
【図13】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法のフローチャートの一例である。
【図14】本発明の一実施形態において、車両の逆走を判定するための道路領域を作成する方法のフローチャートの一例である。
【図15】本発明の一実施形態で作成された道路領域により逆走を判定する方法のフローチャートの一例である。
【図16】本発明の一実施形態で作成された道路領域により逆走を判定する方法のフローチャートの一例である。
【図17】本発明の一実施形態で作成された道路領域により逆走を判定する方法のフローチャートの一例である。
【図18】本発明の一実施形態で作成された道路領域を削除する方法の一例を説明するための図である。
【図19】本発明の一実施形態で作成された道路領域を削除する方法のフローチャートの一例である。
【発明を実施するための形態】
【0008】
〔経路案内装置の構成〕
本発明に係る車両逆走検出装置は、地図情報を提示することによりユーザが設定した目的地への走行経路を案内する経路案内装置に適用することができる。本発明の一実施形態である経路案内装置の一例を図1に示す。以下、図1を参照して、本発明の実施形態となる経路案内装置の構成について説明する。
【0009】
本発明の一実施形態である図1の経路案内装置1は、車両に搭載され、GPS(Global Positioning System)受信機2、車速センサ3、地図情報データベース4、出力部5、および制御部6を備える。
【0010】
GPS受信機2は、GPS衛星から発信される電波を利用して車両の位置情報(経度、緯度)を取得し、取得した位置情報を制御部6に出力する。制御部6は、GPS受信機2が制御部6に出力した車両の位置情報の時間変化から車両の走行方向を算出することができる。
【0011】
車速センサ3は、車両の位置情報を取得し、取得した速度情報を制御部6に出力する。なお、車速センサ3は、経路案内装置1の外部にあってもよい。また、GPS受信機2と制御部6によって自車両の速度を検出し、車速センサ3の代替としてもよい。
【0012】
地図情報データベース4は、キャッシュメモリ、メインメモリ、HDD(Hard Disc Drive)、CD(Compact Disc)、MD(Mini Disc)、DVD(Digital Versatile Disc)、光ディスク、FDD(Floppy(登録商標) Disc Drive)等の記憶装置により構成される。地図情報データベース4には、出力部5に地図情報を出力するために必要な情報が記憶されている。たとえば、道路の位置情報や料金所などの場所の情報を示すノード情報、道路の接続状態を示すリンク情報、一般道路や有料道路、サービスエリア内の道路などの道路種別に関する情報、道路のリンク毎の制限速度や通行可能方向、および経路計算を行うために走行距離または平均走行時間等の条件をノード毎にコストと関連付けさせた経路探索用道路ネットワークデータベースなどが記憶されている。また、本実施形態では、地図情報データベース4には、車両が逆走しているか否かを判定するための道路領域である逆走判定エリアの位置情報がノード情報やリンク情報に関連付けて記憶されている。
【0013】
出力部5は、CRT(Cathode Ray Tube)、液晶表示装置、音声出力装置等の公知の出力装置により構成され、制御部6からの指示に従って地図画面情報や警告情報等の各種情報を出力する。
【0014】
制御部6は、CPU(Central Processing Unit)、ROM(Read Only Memory)、RAM(Random Access Memory)等を備えるマイクロコンピュータ等の汎用または専用の情報処理装置により構成され、CPUがROMに記憶されているコンピュータプログラムを実行することにより経路案内装置1全体の動作を制御する。なお、制御部6は、制御部6が実行する各処理を回路動作により実現するASIC(Application Specific Integrated Circuit)やFPGA(Field Programmable Gate Array)等の回路により構成してもよい。
【0015】
このような構成を有する経路案内装置1は、以下に示す逆走判定エリア作成処理、逆走検出処理、および逆走判定エリア削除処理を並列に実行することにより、運転者に対し警告情報を報知し、車両の逆走を抑制する。
【0016】
本発明の実施形態において逆走警告を行う方法について、高速道路などの有料道路における逆走の場合を例として説明する。高速道路などの有料道路は、地図情報データベース4に記憶されている通行可能方向が一方向に規制されている一方通行の道路である。車両の走行方向と有料道路の通行可能方向とが所定の角度以上異なる場合、車両は有料道路を逆走しているものと判定される。
【0017】
逆走判定エリア作成処理は、有料道路上にある所定のノードに自車両が近づいたとき、それらのノードから延びる道路リンクに対して逆走判定エリアを作成する。
【0018】
逆走検出処理は、逆走判定エリア作成処理が作成した逆走判定エリアを用いて車両が逆走しているか否かを判定することにより逆走を検出し、運転手に逆走していることを音声または画像により報知する。
【0019】
逆走判定エリア削除処理は、逆走判定エリアが次々に作成されることにより、制御部6における逆走検出処理の負荷が過大にならないように、自車両から遠く離れた位置にある逆走判定エリアなどを削除する。
【0020】
以下にそれぞれの処理の詳細について説明する。
【0021】
〔逆走判定エリア作成処理〕
本発明の実施形態における逆送判定エリア作成処理の一例について説明する。逆走判定エリア作成処理は、有料道路にある分岐点や、料金所、一般道との接続点などのノードに自車両が近づいたとき、そのノードから延びる道路リンク上に逆走判定エリアを作成する。各道路リンクにおいて、逆走判定エリアは、地図情報データベース4に記憶されている逆走判定エリアの位置情報に対応した場所に作成される。地図情報データベース4に記憶する逆走判定エリアの位置情報は、ノードから道路リンク沿いに所定距離以下離れた場所に設定しておくことが好ましい。作成された逆走判定エリアに関する情報は、制御部6のRAM等に記憶され、逆走判定エリアに関する三つの処理の間で共有される。
【0022】
作成される逆走判定エリアには、即時有効判定エリア、通過待ち判定エリア、判定終了エリアという3種類がある。
【0023】
即時有効判定エリアは、道路リンクの通行可能方向と自車両の走行方向とを比較して自車両が逆走しているか否かを判定するための道路領域である。即時有効判定エリアの役割を図2に示す。図2において、符号R1は即時有効判定エリアを示している。即時有効判定エリアR1は、ノードP1へ流入する道路リンクL1に対して設定されている。符号D1の矢印は、道路リンクL1の通行可能方向である。自車両Vが即時有効判定エリアR1の内部を走行しているとき、自車両Vの走行方向と通行可能方向D1との成す角度が所定の角度以上であるとき、自車両Vが逆走しているものと判定し、所定の報知を行う。所定の角度とは、たとえば135°でよい。
【0024】
通過待ち判定エリアは、自車両が一度通過すると、前述の即時有効判定エリアに変化する道路領域である。通過待ち判定エリアの役割を図3に示す。図3において、符号R2aは通過待ち判定エリアを示している。通過待ち判定エリアR2aは、ノードP2へ流入する道路リンクL2に対して設定されている。矢印D2は、道路リンクL2の通行可能方向である。自車両Vが通過待ち判定エリアR2aを通過したとき、制御部6は通過待ち判定エリアR2aを即時有効判定エリアR2bに変更する。自車両VがUターン等を行い即時有効判定エリアR2bに進入すると自車両Vは逆走しているものと判定される。
【0025】
判定終了エリアは、自車両が通過すると、それまでに作成された逆走判定エリアをすべて削除するための道路領域である。たとえば車両が有料道路から一般道路に進入したとき、有料道路における逆走判定を終了するため、有料道路の道路リンク上に作成した逆走判定エリアを削除することに利用できる。判定終了エリアの役割について図4の例を用いて説明する。図4において、符号R3は判定終了エリアを示している。判定終了エリアR3は、ノードP3へ流入する道路リンクL3に対して設定されている。自車両Vの走行方向後方には過去に作成された逆走判定エリアR4〜R6があり、これらが制御部6のRAM等に記憶されている。自車両Vが判定終了エリアR3を通過したとき、逆走判定エリアR3〜R6は削除される。
【0026】
以上で説明した3種類の逆走判定エリアのうち、いずれの逆走判定エリアを作成するかは、制御部6により決定される。その方法の概要を図5、図6、および図7を用いて説明する。
【0027】
図5は、複数の有料道路の道路リンクL11〜L14が接続している分岐点であるノードP11に道路リンクL11から自車両Vが近づいた場合を示している。分岐点P11には道路リンクL11およびL12が流入している。また、分岐点P11からは道路リンクL13およびL14が流出している。以下では、道路リンクL11のように自車両が走行している道路リンクのことを自車存在リンクと記載する。また、道路リンクL12のように自車両Vが存在せず、分岐点P11に流入する道路リンクのことを流入リンクと記載する。そして、道路リンクL13およびL14のように分岐点P11から流出する道路リンクを流出リンクと記載する。
【0028】
自車両Vが分岐点P11のようなノードに近づいたとき、制御部6は道路リンクL11〜L14の上に作成する逆走判定エリアR11〜R14を図5のように決定する。まず流入リンクL12の上には、即時有効判定エリアR12を作成することに決定する。そして、自車存在リンクL11と、流出リンクL13およびL14にはそれぞれ通過待ち判定エリアR11、R13、およびR14を作成することに決定する。流入リンクL12には即時有効判定エリアR12を作成することにより、自車両Vが自車存在リンクL11から流入リンクL12に誤って進入し、逆走してしまうことを検出できる。また、道路リンクL11、L13、およびL14には、即時有効判定エリアではなく、通過待ち判定エリアR11、R13、およびR14を作成することにより、自車両Vの位置情報の誤差により自車両の走行方向に誤差が生じた場合に自車両Vが逆走していると誤報知する可能性を低減できる。
【0029】
図6は、有料道路の道路リンクL15と一般道の道路リンクL16とを接続するノードである一般道接続ノードP12に自車両Vが道路リンクL15から近づいた場合を示す。一般道接続ノードP12のように一般道の道路リンクと接続されているノードに自車両Vが近づいたとき、制御部6は図6のように自車存在リンクL15に判定終了エリアR15を作成する。一般道の道路リンクL16には、いずれの逆走判定エリアも作成しない。これにより、車両Vが一般道に進行した場合に有料道路における逆走の検出を終了できる。
【0030】
図7は、自車両Vが料金所のあるノードである料金所ノードP13に近づいた場合を示す。料金所ノードP13には有料道路の道路リンクL17とL18とが接続されており、自車両Vは道路リンクL17から料金所ノードP13に近づいている。
【0031】
料金所のあるノードに自車両が近づいたとき、図7に示すように制御部6は料金所ノードP13の自車存在リンクL17に判定終了エリアR17を作成する。料金所ノードP13の流出リンクL18には、逆走判定エリアを作成しない。なお、道路リンクL18が流入するノードが分岐点であった場合には、改めてそのノードに対応した逆走判定エリアが道路リンクL18に作成される。
【0032】
図8は、料金所付近で作成される逆走判定エリアを説明するための図である。図8では、自車両Vが有料道路の道路リンクL19から分岐点P14、料金所ノードP13、および一般道接続ノードP15を通過して一般道に進行する場合を考える。
【0033】
まず、自車両Vが道路リンクL19から分岐点P14に近づいたとき、制御部6は分岐点P14の自車存在リンクL19、流出リンクL20およびL17に通過待ち判定エリアR19、R20、およびR21をそれぞれ作成する。
【0034】
自車両Vが通過待ち判定エリアR19を通過すると通過待ち判定エリアR19は即時有効判定エリアに変更される。自車両Vが分岐点P14を通過し、道路リンクL17に進入すると、通過待ち判定エリアR21に進入する。自車両Vが通過待ち判定エリアR21を通過すると、通過待ち判定エリアR21は即時有効判定エリアに変更される。
【0035】
自車両Vが道路リンクL17を進行して料金所ノードP13に近づくと、前述したとおり制御部6は分岐点P13の自車存在リンクL17に判定終了エリアR17を作成する。判定終了エリアR17を自車両Vが通過したとき、判定終了エリアR17、即時有効判定エリアR19およびR21、ならびに通過待ち判定エリアR20は削除される。
【0036】
自車両Vが料金所ノードP13を通過し、道路リンクL18に進入した後、一般道接続ノードP15に近づくと、自車存在リンクである道路リンクL18に判定終了エリアR18を作成する。そして、判定終了エリアR18を自車両Vが通過したとき判定終了エリアR18を削除する。そして、自車両Vは一般道接続ノードP15を通過し、一般道に進入する。制御部6は、一般道から再び有料道路に進入するまで、逆走判定エリアの作成を行わない。なお、料金所ノードP13と一般道接続ノードP15との間にさらに分岐点が存在した場合、その分岐点で作成された逆走判定エリアは判定終了エリアR18における処理により削除される。
【0037】
図8の矢印A1のように料金所を通過した自車両Vが反対車線に進入する場合が起こりうる。地図データ上では、反対車線の道路リンクやノードは、道路リンクL17や料金所ノードP13とは違う道路リンクおよびノードとして扱われている。図8の例では、道路リンクL24、ノードP16が反対車線に関する道路リンクやノードに相当する。このように自車両Vが道路リンクL17の反対車線L24に進入し、車両の進行が許可されている方向に走行をはじめたとき、料金所ノードP13に通過する前にそれ以前に作成した逆走判定エリア(たとえば、逆走判定エリアR19〜R21)を削除していないと、自車両の位置情報に誤差が生じたとき誤報知が発生することがある。たとえば、道路リンクL24を走行し、ノードP17に進入するとき、自車両Vの位置情報の誤差により逆走判定エリア(即時有効判定エリア)R21の道路領域を進行しているように自車両Vの位置が誤検知されると誤報知が起こりうる。このような誤報知の可能性を低減するために料金所ノードP13に対して自車存在リンクL17に判定終了エリアR17が作成される。
【0038】
図9は、複数の有料道路が接続するジャンクションの例である。図9のジャンクションには、分岐点であるノードP21〜P24と道路リンクL31〜L39とが存在する。自車両Vは、道路リンクL31から分岐点P21、P22、およびP23を通過し、道路リンクL36に進入しようとしている。
【0039】
自車両Vが道路リンクL31から分岐点P21に近づいたとき、制御部6は分岐点P21に接続されているリンクL31〜L33にそれぞれ逆走判定エリアR31〜R33を作成する。道路リンクL31は、自車存在リンクである。道路リンクL32およびL33は、ノードP21からの流出リンクである。したがって、逆送判定エリアR31〜R33は通過待ち判定エリアである。
【0040】
自車両Vが道路リンクL31から分岐点P21を通過して道路リンクL32に進行すると、通過待ち判定エリアR31およびR32を通過する。制御部6は、自車両Vが通過した通過待ち判定エリアR31およびR32を即時有効判定エリアに変更する。
【0041】
自車両Vが道路リンクL32を進行していくと、分岐点であるノードP22に近づく。このとき、ノードP22に接続されている道路リンクL32、L34、およびL35にそれぞれ逆走判定エリアR34、R35、およびR36を作成する。道路リンクL32は自車存在リンクである。道路リンクL34およびL35は、流出リンクである。したがって、逆走判定エリアR34〜R36は通過待ち判定エリアである。
【0042】
ジャンクションなど複雑に道路が分岐する場所では、複数の分岐点が近い場所にあることが多い。たとえば、ノードP21とP22との位置が近い場合、逆走判定エリアR32とR34とが重なることがあるが、本実施の形態での処理の動作において支障はない。
【0043】
自車両Vが道路リンクL32から分岐点P22を通過して道路リンクL34に進入すると、通過待ち判定エリアR34およびR35を通過する。制御部6は、自車両Vが通過した通過待ち判定エリアR34およびR35を即時有効判定エリアに変更する。
【0044】
自車両Vが道路リンクL34を進行していくと、分岐点であるノードP23に近づく。このとき制御部6は、ノードP23に接続されている道路リンクL34、L36、およびL37にそれぞれ逆走判定エリアR37、R38、およびR39を作成する。道路リンクL34は自車存在リンクである。道路リンクL36は流出リンクである。そして、道路リンクL37は流入リンクである。したがって、作成される逆走判定エリアR37およびR38は通過待ち判定エリアである。そして、逆走判定エリアR39は即時有効判定エリアである。
【0045】
次に、逆走判定エリア作成処理における例外処理について説明する。有料道路には、サービスエリアやパーキングエリアなどの休憩施設が設けられている。サービスエリアなどの休憩施設の駐車場外周にある道路は、走行が許可されている方向が規制されているものがある。しかし、そのような休憩施設内の道路に逆走判定エリアを作成すると、駐車場への駐車行動をしているとき、車両位置の誤差により自車両が逆走していると誤報知してしまうことがある。このようなことを防ぐために休憩施設の分岐点においては、休憩施設に進入または退出するための減速車線および加速車線以外の道路リンクには逆走判定エリアを作成しない。
【0046】
図10から図12は、休憩施設の一例であるサービスエリアにおける逆走判定エリアの作成について説明するための図である。
【0047】
図10から図12に示すサービスエリアには、四つのノードP31〜P34、有料道路の道路リンクL51〜L53、サービスエリア内の道路101〜104、サービスエリアに進入するための減速車線の道路リンクL61、およびサービスエリアから退出するための加速車線の道路リンクL62が存在する。
【0048】
図10の例は、道路リンクL51に存在する自車両Vがサービスエリアに進入する場合と、自車両がサービスエリアから道路リンクL53に退出する場合に作成する逆走判定エリアについて説明するものである。
【0049】
自車両Vは、道路リンクL51の上を走行し、分岐点であるノードP31に近づく。このとき制御部6は、分岐点P31に接続している道路リンクL51、L52、およびL61にそれぞれ逆走判定エリアR51、R52、およびR53を作成する。道路リンクL51は、自車存在リンクである。道路リンクL52およびL61は、ノードP31からの流出リンクである。したがって、作成される逆送判定エリアR51〜R53は通過待ち判定エリアである。
【0050】
自車両Vが道路リンクL51から分岐点P31を通過して道路リンクL61に進入すると、通過待ち判定エリアR51およびR53を通過する。制御部6は、自車両Vが通過した通過待ち判定エリアR51およびR53を即時有効判定エリアに変更する。
【0051】
自車両Vが道路リンクL61を走行すると、サービスエリアの分岐点であるノードP32に近づく。以後、ノードP32のように減速車線とサービスエリアなどの休憩施設を接続するノードを休憩施設進入点と記載する。制御部6は、自車両Vが休憩施設進入点P32に近づくと、休憩施設進入点P32に接続している道路リンクL61に逆走判定エリアR54を作成する。サービスエリア内の道路101および102には逆走判定エリアを作成しない。道路リンクL61は自車存在リンクであるため、逆走判定エリアR54は、通過待ち判定エリアである。
【0052】
自車両Vが、減速車線である道路リンクL61から休憩施設進入点P32を通過してサービスエリアに進入するとき、通過待ち判定エリアR54を通過する。制御部6は、自車両Vが通過した通過待ち判定エリアR54を即時有効判定エリアに変更する。
【0053】
サービスエリア内に進入した自車両Vがサービスエリアから出る場合、サービスエリアとサービスエリアから出るための加速車線の道路リンクL62とを接続するノードP33に近づく。以後、ノードP33のようにサービスエリアなどの休憩施設と加速車線とを接続するノードを休憩施設退出点と記載する。自車両Vが休憩施設退出点P33に近づいたとき、制御部6は加速車線の道路リンクL62に逆走判定エリアR55を作成する。サービスエリア内の道路101および104は休憩施設退出点P33に接続しているが、これらの道路には逆走判定エリアを作成しない。加速車線の道路リンクL62は休憩施設退出点P33の流出リンクであるため、逆走判定エリアR55は通過待ち判定エリアである。
【0054】
サービスエリアから道路リンクL62に進入した自車両Vが通過待ち判定エリアR55を通過すると、制御部6は、通過待ち判定エリアR55を即時有効判定エリアに変更する。
【0055】
自車両Vが加速車線の道路リンクL62を走行すると、分岐点であるノードP34に近づく。自車両Vが分岐点P34に近づくと、制御部6は分岐点P34に接続している道路リンクL62、L52、およびL53にそれぞれ逆走判定エリアR56、R57、およびR58を作成する。加速車線の道路リンクL62は、自車存在リンクである。道路リンクL52は、ノードP34に流入する流入リンクである。道路リンクL53は、ノードP34から流出する流出リンクである。したがって、逆走判定エリアR57は、即時有効判定エリアである。そして、逆走判定エリアR56およびR58は、通過待ち判定エリアである。
【0056】
自車両Vが加速車線である道路リンクL62から分岐点P34を通過して道路リンクL53に進入するとき、自車両Vは通過待ち判定エリアR56およびR58を通過する。制御部6は、自車両Vが通過待ち判定エリアR56およびR58を通過したとき、それらを即時有効判定エリアに変更する。
【0057】
図11は、自車両Vがサービスエリア内から休憩施設進入点P32に近づいた場合の図である。この場合、休憩施設進入点P32の流入リンクである減速車線の道路リンクL61に即時有効判定エリアR59が作成される。そのため、自車両Vが減速車線を逆走することを検出できる。
【0058】
図12は、道路リンクL51から分岐点P31を通過して道路リンクL52に進入した場合である。自車両Vが道路リンクL52に進入し、通過待ち判定エリアR52を通過したとき、制御部6は、通過待ち判定エリアR52を即時有効判定エリアに変更する。そして、分岐点P34に近づいたとき、図12のR60〜R62のように逆走判定エリアを作成する。このとき、道路リンクL52は流入リンクではなく自車存在リンクであるため、逆走判定エリアR60は通過待ち判定エリアである。また、加速車線の道路リンクL62は分岐点P34の流入リンクであるため、逆走判定エリアR56は即時有効判定エリアである。
【0059】
以上説明した逆走判定エリア作成処理のフローチャートを図13および図14に示す。図13および図14のフローチャートの処理は、経路案内装置1の電源がオンになったときに開始される処理であり、制御部6で実行される。
【0060】
ステップS101では、制御部6が、GPS受信機2を介して車両の位置情報と走行方向に関する情報を取得する。これによりステップS101の処理は完了し、ステップS102に進む。
【0061】
ステップS102では、制御部6が、ステップS101の処理により取得した車両の位置情報を利用して車両の現在位置周辺の地図情報を地図情報データベース4から取得する。これにより、ステップS102の処理は完了し、ステップS103に進む。
【0062】
ステップS103では、制御部6が、ステップS101の処理により取得した車両の位置情報および走行方向ならびに地図情報データベース4を利用して、車両が走行方向の前方に進んだときに次に通過するノード(以後、前方ノードと記載する)を検出する。これによりステップS103の処理は完了し、ステップS104に進む。
【0063】
ステップS104では、制御部6が、地図情報データベース4に記憶されている道路種別に関する情報やノード情報、リンク情報などを利用して、ステップS103で検出されたノードが有料道路の分岐点または料金所ノードあるいは一般道接続ノードのいずれかであるか否かを判定する。判定の結果、前方ノードが有料道路の分岐点または料金所ノードあるいは一般道接続ノードのいずれかである場合は、ステップS105に進む。そうでない場合は、ステップ101に戻る。
【0064】
ステップS105では、制御部6が、ステップS101と同様に車両の位置情報と走行方向に関する情報を取得する。これにより、ステップS105の処理は完了し、ステップS106に進む。
【0065】
ステップS106では、制御部6が、地図情報データベース4に記憶されているノード情報とステップS105で取得した車両の位置情報とを利用して、前方ノードが自車両から所定の距離の範囲内であるか否かを判定する。判定の結果、前方ノードが所定の距離の範囲内にあれば、車両が前方ノードに近づいたものとして、図14のステップS111に進む。
【0066】
図14のステップS111では、制御部6が、地図情報データベース4に記憶されているノード情報やリンク情報、道路種別に関する情報を利用して前方ノードが料金所ノードまたは一般道接続ノードか否かを判定する。料金所ノードまたは一般道接続ノードであった場合は、ステップS121に進む。前方ノードが料金所ノードでも一般道接続ノードでもない場合は、ステップS112に進む。
【0067】
ステップS121では、制御部6が、図13のステップS105で取得した車両の位置情報と地図情報データベース4に記憶されているリンク情報とに基づいて自車存在リンクを判別する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図6または図7に示すように前方ノードの自車存在リンクに判定終了エリアを設定し、図13のステップS101に戻る。
【0068】
ステップS112では、制御部6が、地図情報データベース4に記憶されているノード情報、リンク情報、および道路種別に関する情報を利用して前方ノードが休憩施設進入ノードか否かを判定する。判定の結果、休憩施設進入ノードであった場合は、ステップS122に進む。休憩施設進入ノードでなかった場合は、ステップS113に進む。
【0069】
ステップS122では、制御部6が、図13のステップS105で取得した車両の位置情報を利用して、自車両の位置が休憩施設内か否かを判定する。判定の結果、自車両の位置が休憩施設内である場合には、ステップS131に進む。自車両の位置が休憩施設外(減速車線上)であった場合には、ステップS132に進む。
【0070】
ステップS131では、制御部6が地図情報データベース4に記憶されている道路種別に関する情報を利用して、休憩施設進入ノードの流入リンクである減速車線の道路リンクを判別する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図11の逆走判定エリアR59のように減速車線の道路リンクに対して即時有効判定エリアを設定する。これにより、ステップS131の処理は完了し、図13のステップS101に戻る。
【0071】
ステップS132では、制御部6が地図情報データベース4に記憶されている道路種別に関する情報を利用して、休憩施設進入ノードの流入リンクである減速車線の道路リンクを判別する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図10の逆走判定エリアR54のように減速車線の道路リンクに対して通過待ち判定エリアを設定する。これにより、ステップS132の処理を完了し、図13のステップS101に戻る。
【0072】
ステップS113では、制御部6が地図情報データベース4に記憶されているノード情報、リンク情報、および道路種別に関する情報を利用して、前方ノードが休憩施設退出ノードか否かを判定する。判定の結果、休憩施設退出ノードであった場合は、ステップS123に進む。休憩施設退出ノードでなかった場合は、ステップS114に進む。
【0073】
ステップS123では、制御部6が地図情報データベース4に記憶されている道路種別に関する情報を利用して、休憩施設退出ノードに接続する加速車線の道路リンクを判別する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図10の逆走判定エリアR55のように加速車線の道路リンクに通過待ち判定エリアを設定する。これによりステップS123の処理を完了し、図13のステップS101に戻る。
【0074】
ステップS114では、前方ノードは有料道路の分岐点であるので、制御部6が図13のステップS105で取得した車両の位置情報と地図情報データベース4に記憶されているリンク情報とを利用して前方ノードの流入リンクを判断する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図5の逆走判定エリアR12のように前方ノードの流入リンクそれぞれに即時有効判定エリアを設定する。これにより、ステップS114の処理を完了し、ステップS115に進む。
【0075】
ステップS115では、制御部6が図13のステップS105で取得した車両の位置情報と地図情報データベース4に記憶されているリンク情報とを利用して前方ノードの自車存在リンクおよび流出リンクを判別する。そして、制御部6が地図情報データベース4に記憶されている逆走判定エリアの位置情報を利用して、図5の逆走判定エリアR11、R13、およびR14のように前方ノードの自車存在リンクおよび流出リンクそれぞれに通過待ち判定エリアを設定する。これにより、ステップS115の処理を完了し、図13のステップS101に戻る。
【0076】
以上のフローチャートで示される処理により、自車両が有料道路にいる場合に適切な逆走判定エリアを作成できる。
【0077】
〔逆走検出処理〕
次に本発明の実施形態における逆走検出処理の一例について説明する。本実施の形態における逆走検出処理は、制御部6により実行される。本実施の形態における逆走検出処理は、自車両が逆走判定エリア作成処理により作成された逆走判定エリアの道路領域内に存在したときに図2から4を用いて説明した処理を実行するものである。
【0078】
逆走検出処理について図15から17のフローチャートを用いて説明する。図15から17に示される処理は、経路案内装置1の電源がオンになったときに開始される処理であり、制御部6により実行される。なお、前述したとおり、逆走検出処理は逆走判定エリア作成処理と並列に実行される。
【0079】
制御部6が逆走検出処理の実行を開始したら、ステップS201の処理を開始する。ステップS201では、制御部6が、GPS受信機2を介して車両の位置情報と走行方向に関する情報を取得する。これによりステップS201の処理は完了し、ステップS202に進む。
【0080】
ステップS202では、制御部6が、ステップS201で取得した車両の位置情報と制御部6のRAM等に記憶された逆走判定エリアに関する情報とを利用して、自車両が判定終了エリア内にあるか否かを判定する。自車両が判定終了エリア内にあると判定されたら、図4で説明した処理を開始するためステップS203に進む。自車両が判定終了エリア内にない場合は、図16のステップS211に進む。
【0081】
ステップS203では、ステップS201と同様に、制御部6が、GPS受信機2を介して車両の位置情報と走行方向に関する情報を取得する。これによりステップS203の処理は完了し、ステップS204に進む。
【0082】
ステップS204では、制御部6がステップS203で取得した車両の位置情報および走行方向を利用して、判定終了エリアを通過したか否かを判定する。制御部6により、自車両が判定終了エリアを通過していないと判定された場合はステップS203に戻し、通過したと判定された場合はステップS205に進む。
【0083】
ステップS205では、制御部6は、逆走判定エリア作成処理により作成された逆走判定エリアをすべて削除し、ステップS201に戻る。
【0084】
図16のステップS211では、制御部6が、図15のステップS201で取得した車両の位置情報と制御部6のRAM等に記憶された逆走判定エリアに関する情報とを利用して、自車両が通過待ち判定エリア内にあるか否かを判定する。自車両が通過待ち判定エリア内にあると判定されたら、図3で説明した処理を開始するためステップS212に進む。自車両が通過待ち判定エリア内にない場合は、図17のステップS221に進む。
【0085】
ステップS212では、ステップS201と同様に、制御部6が、GPS受信機2を介して車両の位置情報と走行方向に関する情報を取得する。これによりステップS212の処理は完了し、ステップS213に進む。
【0086】
ステップS213では、制御部6がステップS212で取得した車両の位置情報および走行方向を利用して、通過待ち判定エリアを通過したか否かを判定する。制御部6により、自車両が通過待ち判定エリアを通過していないと判定された場合はステップS212に戻し、通過したと判定された場合はステップS214に進む。
【0087】
ステップS214では、制御部6は、自車両が通過した通過待ち判定エリアを即時有効判定エリアに変更し、図15のステップS201に戻る。
【0088】
図17のステップS221では、制御部6が、図15のステップS201で取得した車両の位置情報と制御部6のRAM等に記憶された逆走判定エリアに関する情報とを利用して、自車両が即時有効判定エリア内にあるか否かを判定する。自車両が即時有効判定エリア内にあると判定されたら、図2で説明した処理を開始するためステップS222に進む。自車両が即時有効判定エリア内にない場合は、車両が逆走判定エリア内にいないものと判断して図15のステップS201に戻る。
【0089】
ステップS222では、ステップS201と同様に、制御部6が、GPS受信機2を介して車両の位置情報と走行方向に関する情報を取得する。これによりステップS222の処理は完了し、ステップS223に進む。
【0090】
ステップS223では、制御部6が、ステップS222で取得された車両の走行方向と即時有効判定エリアが作成されている道路リンクにおける通行可能方向と成す劣角を算出し、その劣角が所定の角度以上か否かを判定する。2方向の成す劣角が所定の角度以上と判定された場合は、ステップS224に進む。2方向の成す劣角が所定の角度未満と判定された場合は、ステップS221に戻り、まだ自車両が即時有効判定エリア内にいるか否かを判定する。
【0091】
ステップS224では、制御部6が、出力部5を利用して運転手に自車両が道路リンクを逆走していることを画像や音声などを出力することにより報知し、ステップS221に戻る。
【0092】
〔逆走判定エリア削除処理〕
次に本発明の実施形態における逆走判定エリア削除処理の一例について説明する。
【0093】
逆走判定エリア削除処理は、逆走判定エリア作成処理が作成した逆走判定エリアのうち、自車両から遠く離れた位置にあるものを削除する。逆走判定エリア削除処理の動作について図18を用いて説明する。
【0094】
図18は、ノードP51〜P54および道路リンクL81〜L89からなる道路地図内を自車両Vが走行している場合の例である。自車両Vは、道路リンクL81から分岐点であるノードP51〜P53を通過し、道路リンクL87を走行しており、分岐点であるノードP54に近づいている。このとき、自車両の走行方向の後方にある道路リンクL81〜L86には逆走判定エリアR81〜R88が作成されている。
【0095】
図18の例では、自車両Vが逆走判定エリアR81〜R83に他の逆走判定エリア(たとえば、逆送判定エリアR87)を通過することなく進入することはない。したがって、逆走判定エリアR81〜R83は削除しても逆走を検出できなくなることはなく、逆走検出処理の動作上問題ない。逆走判定エリア削除処理は、このような削除しても逆走検出処理の動作に問題のない逆走判定エリアを判別し、削除する。逆走判定エリアの削除は、たとえば自車両と逆走判定エリアとの間が所定の距離X以上離れているものを削除することにしてもよいし、自車両がある分岐点(たとえばP53)を通過したときに二つ前の分岐点(たとえばP51)に関連する逆走判定エリア(たとえばR81〜R83)を削除するようにしてもよい。いずれの判別方法であっても、図18の例では逆走判定エリアR81〜R83が削除される。
【0096】
逆走判定エリア削除処理の一例を図19のフローチャートを用いて説明する。図19のフローチャートは、経路案内装置1の電源がオンになったときに開始される処理であり、制御部6により実行される。前述したとおり、逆走判定エリア削除処理は、逆走判定エリア作成処理および逆走検出処理と並列に処理される。
【0097】
制御部6により逆走判定エリア削除処理の実行が開始したら、ステップS301の処理を開始する。ステップS301では、制御部6が制御部6のRAMを利用して、逆走判定エリア作成処理により作成された逆走判定エリアが存在するか否かを判定する。逆走判定エリアが存在すればステップS302に進み、存在しない場合はステップS301に留まる。
【0098】
ステップS302では、制御部6が、GPS受信機2を介して車両の位置情報および走行方向に関する情報を取得する。これによりステップS302の処理は完了し、ステップS303に進む。
【0099】
ステップS303では、制御部6が、ステップS302で取得した車両の位置情報と、制御部6のRAMなどに記憶された各逆走判定エリアの位置座標とを比較し、所定の距離離れているものを抽出する。これによりステップS303の処理は完了し、ステップS304に進む。なお、ステップS303における所定の距離は、図13のステップS106における所定の距離よりも長い必要があり、道路リンクの両端のノード間の距離の最大値よりも長いことが好ましい。
【0100】
ステップS304では、制御部6が、ステップS303で抽出した逆走判定エリアを削除する。これによりステップS304の処理は完了し、ステップS301に戻る。なお、制御部6のRAMなどに記憶していた逆走判定エリアの情報は、削除されたことがわかるように変更することが望ましい。
【0101】
以上説明した実施形態によれば、次の作用効果を奏する。
【0102】
(1)本実施形態の車両逆走検出装置は、制御部6がGPS受信機2を利用して自車両の位置と自車両の走行方向を検出し(図13のステップS101等)、地図情報データベース4などに地図情報を記憶し、制御部6が地図情報に基づいて自車両の走行方向の前方にある自車両の逆走を検出するノードを検出し(図13のステップS103)、検出されたノードから延びる道路上に逆走判定エリアを作成し(図14)、自車両が即時有効判定エリア内にあるとき自車両の走行方向に基づいて自車両が逆走しているか否かを判定する(図15〜17)。これにより、逆走判定エリア内でのみ逆走の判定を行うことにしたので、自車両の位置情報の誤差により車両が走行していない道路を走行していると一時的に判断された場合に逆走していると判断する可能性が低くなり、警告情報の誤報知を低減することができる。
【0103】
(2)本実施形態の車両逆走検出装置では、制御部6は即時有効判定エリア、通過待ち判定エリア、および判定終了エリアという3種類の逆走判定エリアを作成することができる(図2〜図4)。制御部6は、地図情報データベース4に記憶されているノード情報、リンク情報、および道路種別に関する情報と自車両の位置情報とに基づいて、各道路リンクに作成する逆走判定エリアの種類を選択し(図5〜図7、図14のステップS111〜S113、S122)、選択された種類の逆走判定エリアを各道路リンクに作成し(図14のステップS114、S115、S121、S123、S131、およびS132)、作成された逆走判定エリアの内部に自車両が存在する場合に、逆走判定エリアの種類ごとに定められた処理を実行する(図15〜17)。これにより、複数の道路が流入または流出しているノードから延びる道路において、より精密な逆走検出を行うことができる。特に自車存在リンクや流出リンクに通過待ち判定エリアを作成することは、自車両の位置情報の誤差などを原因とした自車両の方位情報の誤差が発生したときに誤報知することを低減できる。
【0104】
(3)本実施形態の車両逆走検出装置では、制御部6は、サービスエリアやパーキングエリアなどの休憩施設の道路リンクには逆走判定エリアを作成しない。これにより、休憩施設の駐車場内を走行しているときなどに誤報知してしまうことを防ぐことができる(図10)。
【0105】
(4)本実施形態の車両逆走検出装置では、制御部6は、自車両が一般道や料金所に近づいたとき、自車両が走行している道路の道路リンクに判定終了エリアを作成し(図14のステップS111、S121)、自車両が作成した判定終了エリアを通過したとき、有料道路における逆走報知判定処理を終了する(図15)。これにより、インターチェンジなどにおいて、料金所を一度通過した後に有料道路に引き返したとき、自車両の位置情報の誤差などにより、反対車線の道路リンクに作成された逆走判定エリア内を逆走していると判定されることを防ぐことができる。
【0106】
(5)本実施形態の車両逆走検出装置では、制御部6は、自車両の位置情報と逆走判定エリアの位置情報とに基づいて、自車両から所定の距離以上離れた逆走判定エリアを削除する(図18、図19)。これにより、有料道路を長時間走行したことにより逆走判定エリアが多く作成され、過大な負荷が制御部6に加わることを防ぐことができる。
【0107】
(6)本実施形態の車両逆走検出装置では、制御部6は、逆走報知処理により自車両が逆走していると判定したとき、出力部5を利用して音声または画像により警告情報を出力することができる(図17のステップS224)。これにより、運転手に対して逆走していることを報知できる。
【0108】
以上の実施の形態は、以下のように変形して実施できる。
【0109】
(1)本実施形態において、図5を用いて自車両Vが流入リンクから走行方向の前方にあるノードP11に近づいた場合について説明した。自車両の位置情報に誤差情報が含まれた場合や運転手が逆走に関する報知に気付かなかった場合などにおいて、自車両Vが流出リンクからノードに近づくことが考えられる。このような場合は、自車両がいる道路リンクに即時有効判定エリアを作成することにしてもよい。
【0110】
(2)本実施形態では、作成した逆走判定エリアを制御部6のRAMに記憶することにしたが、これに限定されない。たとえば、ハードディスクなどの不揮発の記憶装置に記憶することにしてもよい。これにより、自車両を駐車した後再起動した場合に、駐車前に作成した逆走判定エリアを用いて判定を行うことができる。これにより、再起動後に自車両の位置情報の誤差により逆走判定エリアが正しく作成されなかった場合でも駐車前に作成した逆走判定エリアを用いて逆走を検出することができる。たとえば、自車両の位置情報の誤差により図11の逆走判定エリアR59が作成されなかったときに、図10の逆走判定エリアR54が不揮発の記憶装置に残っていれば逆走を検出できる。
【0111】
(3)本実施形態では、自車両が有料道路を走行しているときの逆走検出について説明したが、一般道の一方通行の道路などにも適用してもよい。一方通行の道路に適用する場合は、判定終了エリアは、一方通行でない道路リンクに作成すればよい。
【0112】
(4)本実施形態では、逆走判定エリアを作成する位置などは、地図情報データベース4に記憶されている逆走判定エリアの位置情報に基づくものとしたが、ノード情報やリンク情報などに基づいて算出することにしてもよい。たとえば、前方ノードの位置座標を中心とした円をリンクの延在方向に基づいて分割した扇形としてもよいし、前方ノードから延びるリンクに沿った道路幅よりも幅広の道路領域としてもよい。
【0113】
(5)本実施形態では、有料道路における逆走判定において、一般道には逆走判定エリアを作成しないが、一般道にも作成することにしてもよい。たとえば、一般道接続ノードから延びる一般道の道路リンクに判定終了エリアを作成してもよい。
【0114】
(6)本実施形態では、警告報知を音声または画像によるものとしたが、これらに限定するものではない。運転手の五感で知覚できるものであればよい。
【0115】
(7)本実施形態では、GPS受信機2を利用して自車両の走行方向を取得したが、これに限定されるものではない。たとえば、ジャイロセンサなどを利用して取得してもよい。
【0116】
以上説明した各実施の形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されるものではない。
【符号の説明】
【0117】
1:経路案内装置、
2:GPS受信機、
3:車速センサ、
4:地図情報データベース、
5:出力部、
6:制御部
【特許請求の範囲】
【請求項1】
自車両の位置を検出する自車位置検出手段と、
前記自車両の走行方向を検出する走行方向検出手段と、
道路の進行方向が一方向のみ設定されている一方向通行道路を少なくとも含む複数の道路が接続されている接続点の位置情報を含む地図情報を記憶する地図情報記憶手段と、
前記地図情報記憶手段が記憶している地図情報に基づいて、前記走行方向検出手段が検出した前記自車両の走行方向の前方にある前記接続点を判定ポイントに設定する判定ポイント設定手段と、
前記自車両が前記一方向通行道路を逆走しているか否かの判定に用いる逆走判定エリアを、前記判定ポイント設定手段が設定した前記判定ポイントに接続されている複数の道路のうちいずれか少なくとも一つの道路に対して設定する逆走判定エリア設定手段と、
前記判定ポイントに接続されている一方向通行道路に対して設定されている前記進行方向と前記自車両の走行方向とに基づいて、前記自車両が前記一方向通行道路を逆走しているか否かを判定する逆走判定手段とを備え、
前記逆走判定エリア設定手段が設定する前記逆走判定エリアは、前記自車両の逆走を直ちに判定するための即時有効判定エリアを含み、
前記逆走判定手段は、前記自車位置検出手段が検出した前記自車両の位置が前記即時有効判定エリアの範囲内にあるときに、前記自車両が前記一方向通行道路を逆走しているか否かを判定することを特徴とする車両逆走検出装置。
【請求項2】
請求項1に記載の車両逆走検出装置において、
前記逆走判定エリアは、前記自車両の通過後に前記自車両の逆走を判定するための通過待ち判定エリアをさらに含み、
前記逆走判定エリア設定手段は、前記判定ポイントに接続されている複数の道路のうち前記判定ポイントに向かう方向に前記進行方向が設定されている一方通行道路であって、前記自車両が存在していない道路に対しては前記即時有効判定エリアを設定し、前記自車両が存在する道路または前記判定ポイントから離れる方向に前記進行方向が設定されている一方通行道路に対しては、前記通過待ち判定エリアを作成し、
前記自車両が前記通過待ち判定エリアを通過したときに、前記通過待ち判定エリアを前記即時有効判定エリアに変更するエリア変更手段をさらに備えることを特徴とする車両逆走検出装置。
【請求項3】
請求項1または2に記載の車両逆走検出装置において、
前記逆走判定エリアは、前記自車両の逆走の判定を終了するための判定終了エリアをさらに含み、
前記逆走判定エリア作成手段は、前記判定ポイントに第一の道路種別の道路が接続されている場合、または、前記判定ポイントが所定の場所を表す場合、前記自車両が走行する道路に対して前記判定終了エリアを設定し、
前記自車両が前記判定終了エリアを通過したとき、前記逆走判定エリア作成手段により作成された前記逆走判定エリアを削除する第一のエリア削除手段をさらに備えることを特徴とする車両逆走検出装置。
【請求項4】
請求項3に記載の車両逆走検出装置において、
前記第一の道路種別は、一般道路を含むことを特徴とする車両逆走検出装置。
【請求項5】
請求項3または4に記載の車両逆走検出装置において、
前記所定の場所は、有料道路の料金所を含むことを特徴とする車両逆走検出装置。
【請求項6】
請求項1から5のいずれか一項に記載の車両逆走検出装置において、
前記逆走判定エリア設定手段は、前記判定ポイントに接続されている複数の道路のうち第二の道路種別の道路には前記逆走判定エリアを設定しないことを特徴とする車両逆走検出装置。
【請求項7】
請求項6に記載の車両逆走検出装置において、
前記第二の道路種別は、有料道路の休憩施設内の道路を含むことを特徴とする車両逆走検出装置。
【請求項8】
請求項1から7のいずれか一項に記載の車両逆走検出装置において、
前記自車両の走行方向の後方にあり、前記自車両から所定の距離以上離れている前記逆走判定エリアを削除する第二のエリア削除手段をさらに備えることを特徴とする車両逆走検出装置。
【請求項9】
請求項1から8のいずれか一項に記載の車両逆走検出装置において、
前記逆走判定手段により自車両が逆走していると判定されたときに音声または画像により逆走していることを運転手に報知する報知手段をさらに備えることを特徴とする車両逆走検出装置。
【請求項1】
自車両の位置を検出する自車位置検出手段と、
前記自車両の走行方向を検出する走行方向検出手段と、
道路の進行方向が一方向のみ設定されている一方向通行道路を少なくとも含む複数の道路が接続されている接続点の位置情報を含む地図情報を記憶する地図情報記憶手段と、
前記地図情報記憶手段が記憶している地図情報に基づいて、前記走行方向検出手段が検出した前記自車両の走行方向の前方にある前記接続点を判定ポイントに設定する判定ポイント設定手段と、
前記自車両が前記一方向通行道路を逆走しているか否かの判定に用いる逆走判定エリアを、前記判定ポイント設定手段が設定した前記判定ポイントに接続されている複数の道路のうちいずれか少なくとも一つの道路に対して設定する逆走判定エリア設定手段と、
前記判定ポイントに接続されている一方向通行道路に対して設定されている前記進行方向と前記自車両の走行方向とに基づいて、前記自車両が前記一方向通行道路を逆走しているか否かを判定する逆走判定手段とを備え、
前記逆走判定エリア設定手段が設定する前記逆走判定エリアは、前記自車両の逆走を直ちに判定するための即時有効判定エリアを含み、
前記逆走判定手段は、前記自車位置検出手段が検出した前記自車両の位置が前記即時有効判定エリアの範囲内にあるときに、前記自車両が前記一方向通行道路を逆走しているか否かを判定することを特徴とする車両逆走検出装置。
【請求項2】
請求項1に記載の車両逆走検出装置において、
前記逆走判定エリアは、前記自車両の通過後に前記自車両の逆走を判定するための通過待ち判定エリアをさらに含み、
前記逆走判定エリア設定手段は、前記判定ポイントに接続されている複数の道路のうち前記判定ポイントに向かう方向に前記進行方向が設定されている一方通行道路であって、前記自車両が存在していない道路に対しては前記即時有効判定エリアを設定し、前記自車両が存在する道路または前記判定ポイントから離れる方向に前記進行方向が設定されている一方通行道路に対しては、前記通過待ち判定エリアを作成し、
前記自車両が前記通過待ち判定エリアを通過したときに、前記通過待ち判定エリアを前記即時有効判定エリアに変更するエリア変更手段をさらに備えることを特徴とする車両逆走検出装置。
【請求項3】
請求項1または2に記載の車両逆走検出装置において、
前記逆走判定エリアは、前記自車両の逆走の判定を終了するための判定終了エリアをさらに含み、
前記逆走判定エリア作成手段は、前記判定ポイントに第一の道路種別の道路が接続されている場合、または、前記判定ポイントが所定の場所を表す場合、前記自車両が走行する道路に対して前記判定終了エリアを設定し、
前記自車両が前記判定終了エリアを通過したとき、前記逆走判定エリア作成手段により作成された前記逆走判定エリアを削除する第一のエリア削除手段をさらに備えることを特徴とする車両逆走検出装置。
【請求項4】
請求項3に記載の車両逆走検出装置において、
前記第一の道路種別は、一般道路を含むことを特徴とする車両逆走検出装置。
【請求項5】
請求項3または4に記載の車両逆走検出装置において、
前記所定の場所は、有料道路の料金所を含むことを特徴とする車両逆走検出装置。
【請求項6】
請求項1から5のいずれか一項に記載の車両逆走検出装置において、
前記逆走判定エリア設定手段は、前記判定ポイントに接続されている複数の道路のうち第二の道路種別の道路には前記逆走判定エリアを設定しないことを特徴とする車両逆走検出装置。
【請求項7】
請求項6に記載の車両逆走検出装置において、
前記第二の道路種別は、有料道路の休憩施設内の道路を含むことを特徴とする車両逆走検出装置。
【請求項8】
請求項1から7のいずれか一項に記載の車両逆走検出装置において、
前記自車両の走行方向の後方にあり、前記自車両から所定の距離以上離れている前記逆走判定エリアを削除する第二のエリア削除手段をさらに備えることを特徴とする車両逆走検出装置。
【請求項9】
請求項1から8のいずれか一項に記載の車両逆走検出装置において、
前記逆走判定手段により自車両が逆走していると判定されたときに音声または画像により逆走していることを運転手に報知する報知手段をさらに備えることを特徴とする車両逆走検出装置。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2011−191926(P2011−191926A)
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願番号】特願2010−56405(P2010−56405)
【出願日】平成22年3月12日(2010.3.12)
【出願人】(000001487)クラリオン株式会社 (1,722)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成23年9月29日(2011.9.29)
【国際特許分類】
【出願日】平成22年3月12日(2010.3.12)
【出願人】(000001487)クラリオン株式会社 (1,722)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]