
車両逆走防止システムおよび車両逆走防止方法

【課題】1台のカメラを用いて逆走判定を行うとともに逆走車がない場合には広域監視に活用でき、故意に逆走する車両に対しては当該車両を特定できる車両逆走防止システム・方法を提供することにある。
【解決手段】本発明に関わる車両逆走防止システムは、車体sを撮影する撮影部2と、撮影部2にて撮影した画像G1から逆走車Cgの有無を判定する逆走判定部4と、撮影部2の姿勢、およびズーム、フォーカスを調整する撮影駆動部7と、逆走車Cgに逆走である旨の注意を喚起する注意喚起装置19と、注意喚起装置19に対して逆走車Cgの有無を送信する逆走出力部5と、注意喚起装置19から信号を受信する撮影入力部6とを備え、撮影入力部6が注意喚起無視の信号を受信した場合、撮影駆動部7にて撮影部2を調整し、撮影部2にて逆走車Cgを特定する画像G2を撮影している。
【解決手段】本発明に関わる車両逆走防止システムは、車体sを撮影する撮影部2と、撮影部2にて撮影した画像G1から逆走車Cgの有無を判定する逆走判定部4と、撮影部2の姿勢、およびズーム、フォーカスを調整する撮影駆動部7と、逆走車Cgに逆走である旨の注意を喚起する注意喚起装置19と、注意喚起装置19に対して逆走車Cgの有無を送信する逆走出力部5と、注意喚起装置19から信号を受信する撮影入力部6とを備え、撮影入力部6が注意喚起無視の信号を受信した場合、撮影駆動部7にて撮影部2を調整し、撮影部2にて逆走車Cgを特定する画像G2を撮影している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、高速道路におけるパーキングエリア、サービスエリアなどの一方通行の出入り口における車両の逆走を検出し、逆走する車両を特定できる車両逆走防止システムおよび車両逆走防止方法に関する。
【背景技術】
【0002】
従来、車両の逆走(走行路の進行方向と反対向きの走行)による重大事故を防ぐ方法として、走行路の撮影画像から逆走判定に有効な特徴となる情報を抽出し、車両が逆走しているか否かの逆走判定を行う車両逆走検知装置がある。例えば、特許文献1には、走行する車のナンバープレートを撮影できるようにカメラを設置し、撮影した画像から逆走判定を行う車両逆走検知装置が記載されている。逆走判定は、車両の撮影画像からナンバープレートを認識し、ナンバープレートの時間的(経時的)な位置変化により移動方向を求め、車両が逆走しているか否かを判定する。この車両逆走検知装置はナンバープレートを認識するため、車両を特定することが可能である。
【0003】
一方、特許文献2には、車体の時間的(経時的)な移動変化から逆走判定を行う。
これらの方法は、車両に何らの装置も取り付ける必要がないため、運転手が別途、逆走判定を利用するための専用機器を車両に取り付ける時間や費用負担も発生しない。また、高速道路を利用する何れの車両に対しても、逆走判定を適用することができ、逆走事故防止としての効果は期待できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−234486号公報
【特許文献2】特開平10−269492号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、従来の技術では、車体の撮影画像から逆走判定に使用する有効な特徴となる情報として、車体に必ずついているナンバープレートの移動方向から判定する局所的な情報を活用した場合と、車体の移動方向から判定する全体的な情報を活用した場合が存在するが、それぞれ次の長所と短所がある。
【0006】
特許文献1のナンバープレートの移動方向から判定する場合、ナンバープレートを撮影するため、車両の逆走判定を行うとともに逆走車両の特定が可能である。さらに、通過する車体のナンバープレートを撮影するため、逆走車以外の順走車を含む全ての車体の特定を行うことができる。
【0007】
しかし、車体の局所的なナンバープレートを撮影するため、カメラの撮影範囲は狭い。例えば、通過する車体が少ない場所や、注意散漫な逆走車に対して逆走を気づかせる仕組みを設けることで、逆走現象が改善される場合、カメラの撮影範囲をナンバープレートの撮影に特化し狭めることは、固定カメラの広域を撮影できる機能を活かしきれていない。
【0008】
一方、特許文献2の車体の移動方向から逆走を判定する場合、車体以外にも周辺の環境、状況をカメラにて撮影することが可能であるため、逆走車を撮影する以外にも広域の監視を行うことができる。しかし、大きく車体全体を撮影するため、ナンバープレートに絞った撮影と比較するとナンバープレートを明確(鮮明)に撮影することが難しい。逆走車の中には、故意に車両を逆走させる運転者も存在するため、ただ逆走判定を行うだけでなく車両を特定する価値は大きい。
【0009】
本発明の目的は、1台のカメラを用いて逆走判定を行うとともに逆走車がない場合には広域監視に活用でき、故意に逆走する車両に対しては当該車両を特定できる車両逆走防止システムおよび車両逆走防止方法を提供する。
【課題を解決するための手段】
【0010】
上記目的を達成すべく、第1の本発明に関わる車両逆走防止システムは、車体を撮影する撮影部と、前記撮影部にて撮影した画像から逆走車の有無を判定する逆走判定部と、前記撮影部の姿勢、およびズーム、フォーカスを調整する撮影駆動部と、逆走車に逆走である旨の注意を喚起する注意喚起装置と、前記注意喚起装置に対して前記逆走車の有無を送信する逆走出力部と、前記注意喚起装置から信号を受信する撮影入力部とを備え、前記撮影入力部が注意喚起無視の信号を受信した場合、前記撮影駆動部にて前記撮影部を調整し、前記撮影部にて逆走車を特定する画像を撮影している。
【0011】
第2の本発明に関わる車両逆走防止方法は、車両の逆走を防止する車両逆走防止方法であって、撮影部で車体を撮影した画像から逆走車の有無を判定し、逆走車に逆走である旨の注意を喚起し、前記逆走車が注意を無視した場合、前記撮影部の姿勢、およびズーム、フォーカスを調整し、前記撮影部で当該逆走車を特定する画像を撮影している。
【発明の効果】
【0012】
本発明によれば、1台のカメラを用いて逆走判定を行うとともに逆走車がない場合には広域監視に活用でき、故意に逆走する車両に対しては当該車両を特定できる車両逆走防止システムおよび車両逆走防止方法を実現できる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る実施形態の車両逆走防止システムの構成概要を示す上面図である。
【図2】実施形態の車両逆走防止システムの機能ブロック図である。
【図3】実施形態の車両逆走防止システムの近傍を示す斜視図である。
【図4】(a)は実施形態の撮影部にて撮影された画像を示す図であり、(b)〜(d)は実施形態の逆走車が撮影部にて撮影された画像を示す図である。
【図5】実施形態の撮影部のカメラを逆走車の車体のナンバープレートを撮影できる位置に移動した場合の撮影画像を示す図である。
【図6】(a)、(b)は実施形態の逆走である旨の警告メッセージを出力した表示パネルを示す図である。
【図7】実施形態の逆走車有りと判定された結果、注意喚起装置のバーが降りた状態を示す斜視図である。
【図8】実施形態の車両逆走防止システムの動作手順を示す動作フロー図である。
【図9】実施形態のカメラがパーキングエリアを広域に撮影し監視を行っている状態を示す図である。
【図10】(a)、(b)は実施形態の順走車に対して警告を発生する装置を適用した例を示す上面図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態について添付図面を参照して説明する。
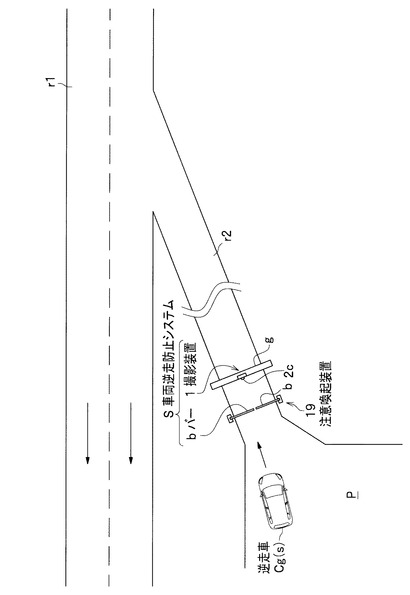
図1は、本発明に係る実施形態の車両逆走防止システムの構成概要を示す上面図である。
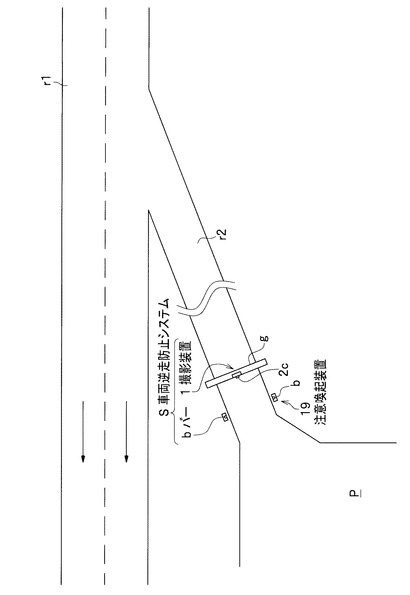
実施形態の車両逆走防止システムSは、高速道路などの本線r1と、サービスエリアもしくはパーキングエリアPとを接続する一方通行路r2のパーキングエリアPの近傍に設置される。以下では、パーキングエリアPを例に説明する。なお、図1の一方通行路r2は、本線r1からパーキングエリアPに向けて一方通行になっているものとする。
【0015】
車両逆走防止システムSは、本線r1からパーキングエリアPに進入するための一方通行路r2に向け逆走する車体s(逆走車Cg)を撮影するカメラ2cと、カメラ2cで撮影した車体sの移動方向から逆走を判定する逆走判定手段(後記の逆走判定部4)と、逆走判定後に逆走車Cgに対して注意を喚起するためにバーb、bを降下する手段(後記の図2の駆動部B11a)とを具備している。
なお、図1では、バーb、bを降下した状態を示している。
【0016】
逆走車Cg(車体s)がバーb、bを越えて(強行突破して)一方通行路r2に進入した場合、故意に逆走させている運転者と判断して、カメラ2cの姿勢を車両特定用(ナンバープレート撮影用)に設定し(図5参照)、予め定めておいた(既定の)姿勢およびズーム、フォーカスのモードに移行し、車体sのナンバープレートsp(図5参照)を撮影し、逆走車Cgを特定する。
【0017】
図2は、実施形態の車両逆走防止システムの機能ブロック図である。
車両逆走防止システムSは、主要機能として、逆走車Cgを発見するとともに逆走車Cgを特定する撮影装置1と、逆走車Cgに対して逆走している旨の注意を喚起する注意喚起装置19とを備えている。
撮影装置1は、撮影部2のカメラ2c(図1参照)と、逆走車Cgを検知する検知エリアを撮影画像に設定する検知エリア設定部3と、検知エリアで逆走車Cgを判定する逆走判定部4と、注意喚起装置19に制御信号(逆走車有りの信号)を出力する出力部A5とを具える。
【0018】
さらに、撮影装置1は、注意喚起装置19から制御信号(逆走車の逆走注意無視の信号)が入力される入力部A6と、撮影部2を姿勢およびズーム、フォーカスを駆動(調整)し所定のモードに設定する駆動部A7と、撮影画像などの各種データを記録する記録部8と、逆走車Cgのナンバープレートspの車両番号を解析する解析部9とを有している。
【0019】
ここで、撮影部2のカメラ2cはパーキングエリアPを広く撮影する広域監視と、逆走車Cgのナンバープレートspを撮影するナンバープレート撮影との2つの撮影モードを有している。
【0020】
注意喚起装置19は、撮影装置1から制御信号(逆走車有りの信号)を受信する入力部B10と、バーb、bの上下方向の揺動(約90度の回転運動)の開閉動作を行う駆動部B11aと、バーb、bの閉鎖時に逆走車Cgの通過を検知する検出部11bとを備えている。さらに、注意喚起装置19は、検出部11bからのセンサ信号を基に逆走車Cgが逆走の注意を無視したか否かを判定する通過判定部12と、撮影装置1に制御信号(逆走車の逆走注意無視の信号)を送信する出力部B13とを有している。
【0021】
図3は、車両逆走防止システムの近傍を示す斜視図である。図4は、逆走判定画像の様子を示す図であり、図4(a)は撮影部にて撮影された画像を示しており、図4(b)〜(d)は、逆走車が撮影部にて撮影された画像を示している。
図3に示すように、1台の車(車体s)が通過できる高さの位置に設置された撮影部2のカメラ2cにて撮影された撮影画像G1(図4(a)参照)から、逆走判定部4にて車体sの移動方向を演算し、パーキングエリアPから一方通行路r2に入る手前にて、逆走車Cgであるか否か判定する。
具体的には、逆走判定部4は、検知エリア設定部3が撮影画像G1(図4(a)参照)内に設定した逆走判定エリアG1aの矩形枠を、逆走判定を行うエリアとして、逆走しているか否かの判定を行う。なお、図4(a)の撮影画像G1には、車体sは映っていない。
【0022】
注意喚起装置19は、逆走車Cgに逆走の注意を喚起するためのバーb、bを備えている。逆走判定部4にて逆走と判定された場合、出力部A5を通して、注意喚起装置19内の入力部B10に信号を送信し、駆動部B11aを用いてバーb、bを、図1、図3に示すように、一方通行路r2に進入する手前に降ろし、逆走車Cgの進入を阻止する。
【0023】
通過判定部12は、降ろした(閉鎖した)バーb、bを逆走車Cg(車体s)が通過(強行突破)したか否かを、検出部11bの後記の各種センサで検出したセンサ信号を基に判定する。そして、車体sがバーb、bを通過したと判定した場合、出力部B13から撮影装置1の入力部A6に対して、強引に逆走車Cgが、降ろした(閉鎖した)バーb、bを通過したことを知らせる信号を送信する。
【0024】
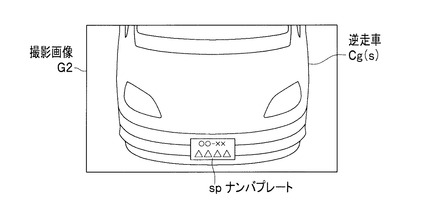
撮影装置1は、逆走車Cgの車体sがバーb、bを通過した信号を、撮影装置1の入力部A6にて受信すると、駆動部A7は、撮影部2の姿勢およびズーム、フォーカスを予め設定した逆走車Cgのナンバープレートspを撮影できる位置(図5参照)に移動し、撮影部2のカメラ2cは、逆走車Cgの車体sのナンバープレートspを撮影する。図5は、撮影部のカメラを逆走車の車体のナンバープレートを撮影できる位置に移動した場合の撮影画像を示す図である。
撮影された画像は、記録部8(図2参照)に記録される。
【0025】
逆走車Cgのナンバープレートsp(図5参照)の撮影後、駆動部A7を用いて、撮影部2の姿勢およびズーム、フォーカスを元の逆走判定用の撮影位置(広域にパーキングエリアPを撮影する位置)に戻す。
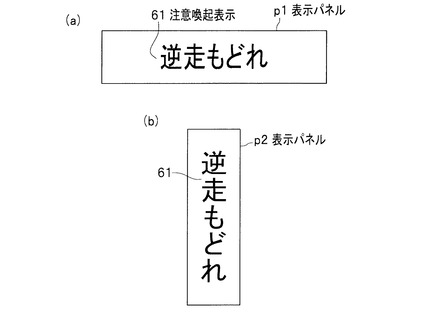
図6(a)、(b)は、逆走である旨の警告メッセージを出力した表示パネルを示す図である。
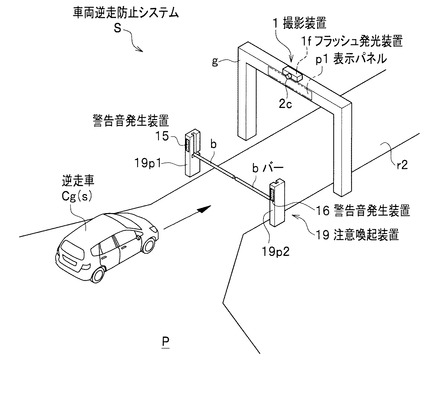
逆走車Cgに逆走である旨気付かせる仕組みとしてバーb、b以外に、注意喚起装置19は、表示パネルp1、p2(図6参照)を逆走車Cgに対向するように設けて、警告メッセージ“逆送もどれ”の注意喚起表示61を出力してもよい。注意喚起表示61は、文字以外に光を点滅させて注意を喚起してもよい。
【0026】
図3の二点鎖線は、表示パネルp1を、カメラ2cを固着するゲートgに取着した場合を示している。または、表示パネルp2を注意喚起装置19のポスト19p1、19p2のパーキングエリアPの側に取着してもよい。或いは、警告用の構造物(図示せず)を一方通行路r2の路側帯に構築して、表示パネルp1、p2を取着してもよい。
【0027】
なお、表示パネルp1、p2は何れかを適用してもよいし、両方適用してもよい。この場合、駆動部B11aのバーb、bの上下動の制御を表示パネルp1、p2に警告を出力(表示)する制御に代替してもよい。
或いは、駆動部B11のバーb、bを上下動する制御および表示パネルp1、p2に警告を出力(表示)する制御の両制御を遂行するように構成してもよい。
【0028】
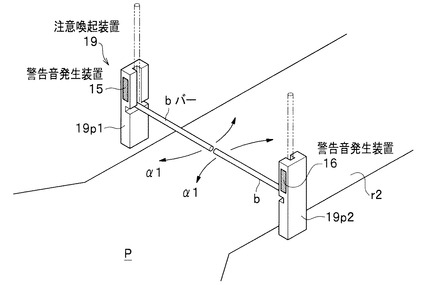
図7は、逆走車有りと判定された結果、注意喚起装置のバーが降りた状態を示す斜視図である。
注意喚起装置19のバーbは、ポスト19p1、19p2に下降状態(図7の実線)と上昇状態(図7の二点鎖線)との間を上下方向に揺動(約90度の回転運動)自在に設けられている。
【0029】
ポスト19p1、19p2には、それぞれバーb、bを、図7の2点鎖線で示す鉛直方向の上昇状態と、図7の実線で示す水平方向の下降状態との2つの状態に上下動させる駆動手段である駆動部B11aが内設されている。駆動部B11aは、モータ、減速機構、伝達機構などにより、モータの回転運動をバーbの上下の揺動運動(ほぼ90度の回転運動)に変換する。
【0030】
ポスト19p1には音(警告音や警告音声など)を発生する警告音発生装置15が設けられている。同様に、ポスト19p2には音(警告音や警告音声など)を発生する警告音発生装置16が設けられている。
通常時には、バーbは、駆動手段の駆動部B11aにより、図7の2点鎖線で示すように鉛直方向の上昇状態とされ、車両が一方通行路r2からパーキングエリアPに進入可能とされている。
【0031】
図1に示すように、撮影装置1の撮影部2のカメラ2cで逆走車Cgを撮影し逆走判定部4で逆走車有りと判定された場合、図7の実線で示すように、バーbは、駆動部B11aにより、図7の2点鎖線の状態から図7の実線の状態に水平方向に降下され、逆走車Cgに対して、車両のパーキングエリアPから一方通行路r2へ進入する手前で、注意喚起する(図3参照)。
【0032】
しかし、逆走車Cgのうちには、降下したバーb、bを強行突破して、パーキングエリアPから一方通行路r2へ進入することも想定されるため、バーb、bは、図7の矢印α1に示す稼動領域を有しており、水平方向に回動できるようにポスト19p1、19p2に弾性的に枢設されている。または、バーb、b自体を弾性材で形成して、弾性変形により稼動領域を形成してもよい。これにより、バーb、bは、逆走車Cgが強行突破した場合にも、破壊されない構造としている。
【0033】
また、強行突破した逆走車Cgに対して、警告音発生装置15、16から、警告音や警告音声を発生する。
バーb、bの各支持部には、バーb、bがそれぞれ強行突破されたことを、バーb、bの水平方向の回転運動を機械的または磁気的に検出する機械式センサや磁気式センサが配設されている。なお、バーb、bがそれぞれ強行突破されたことを検出できれば、光、静電容量などのその他のセンサを用いてもよい。
【0034】
或いは、逆走車Cgがポスト19p1、19p2の間を通過したことを検出するため、ポスト19p1、19p2の内方に向けて、反射型の赤外線センサや半導体のホトセンサを使用する透過型の赤外線センサを設置することも可能である。なお、逆走車Cgがポスト19p1、19p2の間を通過したことを検出できれば、赤外線センサ以外のセンサを用いてもよいことは勿論である。
【0035】
<車両逆走防止システムSの動作手順>
次に、車両逆走防止システムSの動作手順を時間経過に従って説明する。
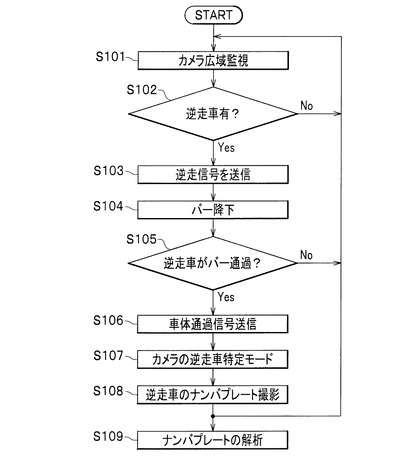
図8は、車両逆走防止システムの動作手順を示す動作フロー図である。図9は、カメラ2cがパーキングエリアPを広域に撮影し監視を行っている状態を示す図である。
図9に示すように、撮影部2のカメラ2cはパーキングエリアPを広域に撮影し監視を行っている(図8のS101)。この場合、注意喚起装置19のバーb、bは、鉛直方向に上げられ、立位の状態にある。
【0036】
逆走判定部4は、パーキングエリアP内を1台の撮影部2のカメラ2cで広く撮影した撮影画像G1の逆走判定エリアG1aから、パーキングエリアPから高速道路などの本線r1に接続する一方通行路r2を逆走する車があるか否か判定する(逆走判定の詳細は後記)(S102)。
逆走車Cgが無い場合(S102でNo)、図8のS101に移行し、撮影部2のカメラ2cでの撮影によるパーキングエリアPの広域な監視を継続する。
【0037】
一方、逆走車Cg有りと判定された場合(S102でYes)、逆走車Cgに対して、逆走していることを気付かせるために撮影装置1の出力部A5から、注意喚起装置19の入力部B10に対して逆走車Cgの存在を知らせる信号を送信し(S103)、注意喚起装置19の駆動部B11aを用いて、バーb、bを立位の状態(図7の2点鎖線参照)から、一方通行路r2への進入手前の位置に降下する(図7の2点実線参照)(S104)。
【0038】
続いて、通過判定部12は、逆走車Cgがバーb、bを強引に通過(強行突破)したかを、検出部11bのセンサ(機械式センサや磁気式センサ、赤外線センサなど)で検出して検出部11bから送信されるセンサ信号を基に判定する(S105)。
逆走車Cgがバーb、bを強引に通過(強行突破)しない場合には(S105でNo)、S101に移行し、撮影部2のカメラ2cを、駆動部A7で駆動することなく、広域監視を続行する。
【0039】
仮に、逆走車Cgがバーbを強引に通過(強行突破)すると、通過判定部12にて通過し たことが判定され(S105でYes)、注意喚起装置19の出力部B(13)から、撮影装置1の入力部A6に対して車体(車両)通過信号を送信する(S106)。なお、逆走車Cgに注意を喚起するために撮影装置1にフラッシュ発光装置1fを設け、S106において、バーb、bを強行突破する車体s(逆走車Cg)に対して、強烈なフラッシュ発光を行ってもよい。
【0040】
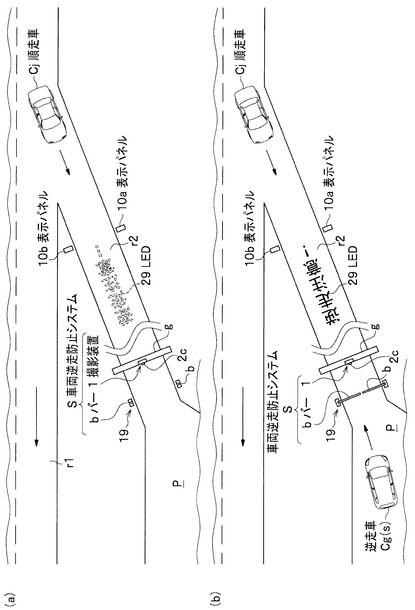
また、図10(a)に示す一方通行路r1に「逆走注意!」を描いたLED(Light Emitting Diode)29を埋設し、逆走車Cgが発生している最中は、図10(b)に示すように、埋設したLED29を点灯して「逆走注意!」を表示し、順走車Cjに対して警告を発生する装置を用いてもよい。或いは、一方通行路r1近くに、表示パネル10a、10bを立設して、縦書きで「逆走注意!」を、LEDを点灯させて表示し、順走車Cjに逆走車Cgが有り危険である旨の注意を促すようにしてもよい。または、音声で「逆走注意!」をアナウンスしたり、これらを組み合わせて、順走車Cjに逆走車有りの注意を喚起してもよい。
【0041】
図8のS107で、撮影装置1の入力部A6が車体(車両)通過信号を受信すると、逆走車Cgを特定するため、駆動部A7は、撮影部2のカメラ2cを予め設定した逆走車Cgのナンバープレートspを撮影する逆走車Cgの特定用の姿勢、およびズーム、フォーカス(車両特定用の撮影範囲の撮影画像G2)(図5参照)に駆動(調整)する。
【0042】
これにより、撮影部2のカメラ2cは、図5に示す車両特定用の撮影範囲にて、逆走車Cgのナンバープレートspを撮影する(S108)。図1、図3に示す撮影装置1とバーb、bとの位置関係は、車両逆走防止システムSの設置環境や状況に適合させて適宜調整してよい。
【0043】
S108の後、S101に移行するとともに、S109で逆走車Cgのナンバープレートspの“車両ナンバー”を解析する。
S109において、解析部9は、まず、S108で撮影した撮影画像G2から、ナンバープレートspの形がある画像を検索し、そして、明確に(くっきりと)ナンバープレートspが撮影されている撮影画像を特定する。続いて、解析部9は、特定した撮影画像のナンバープレートspの“車両ナンバー”を文字認識などにより求める。なお、求めた逆走車Cgの“車両ナンバー”は記録部8に記録される。
【0044】
<逆走判定部4での逆走車Cgの判定>
次に、図8のS102で行われる撮影装置1の逆走判定部4での逆走車Cgの判定方法について説明する。
車両逆走防止システムSでは、撮影装置1の逆走判定部4が、撮影部2のカメラ2cにて撮影した撮影画像G1(図4参照)の移動物体(車体s)の移動方向により逆走判定を行う。逆走判定を行う範囲は、撮影装置1を設置した際に、撮影画像G1中にあらかじめ検知エリア設定部3にて、ユーザが任意に設定した逆走判定エリアG1a(図4(a)参照)内で行う。そのため、逆走判定エリアG1a以外の移動物体(車体s)の影響を受けることなく逆走判定を行うことができる。
【0045】
図4の場合、図4(a)のT画像では、撮影部2のカメラ2cでパーキングエリアP内を撮影し、広域に監視を行っている。
図4(b)のT+1画像では、逆走車Cgが存在するが、逆走判定エリアG1aの枠外のため逆走判定は行っていない状態にある。
図4(c)のT+2画像は、逆走判定エリアG1aの枠内に車体s(逆走車Cg)が存在するため、次の図4(d)のT+3画像を用いて、車体s(逆走車Cg)の移動方向を求めて逆走判定を行う。
【0046】
具体的には、逆走判定部4は、図4(c)のT+2画像の車体sが、時間経過に従い、図4(d)のT+3画像の車体sのように下方に移動する場合には、撮影部2のカメラ2cに接近したため、車体sは逆走車Cgであると判定する。
一方、逆走判定部4は、図4(c)のT+2画像の車体sが、時間経過に従った図4(d)のT+3画像で、上方に移動する場合には、撮影部2のカメラ2cから遠ざかっているため、車体sは逆走車Cgでないと判定する。
なお、図4(c)のT+2画像の車体sが、時間経過に従い、大きくなる場合には逆走と判定する一方、小さくなる場合には順走と判定してもよい。
【0047】
上記構成によれば、故意に逆走運転をする運転者と逆走していることに気付いていない著しく注意力が低下している運転者とを判別して、撮影部2を状況ごとに制御することで、逆走判定時と車両(逆走車Cg)特定時の異なる2つの状況において、1台の撮影部2のカメラ2cで広域監視および逆走判定と逆走車Cgの車両特定とを遂行することが可能である。
また、車体sには、何も取り付ける必要がない。
【0048】
従って、高速道路におけるパーキングエリア、サービスエリアの一方通行の出入り口における逆走を検出し、故意に逆走運転をする運転者に対しては、車両(逆走車Cg)特定を行い、さらに逆走車Cgが存在しない場合には、周辺の状況を監視する低コストの車両逆走防止システムを実現できる。
【0049】
なお、前記実施形態では、高速道路などの本線r1と、サービスエリアもしくはパーキングエリアPとを接続する一方通行路r2を例示して説明したが、一方通行の道路であれば、高速道路などへ入る道路、高速道路などから出る道路など、限定されることなく幅広く適用可能である。
【符号の説明】
【0050】
1 撮影装置(撮影部、逆走判定部、逆走出力部、撮影入力部、撮影駆動部)
1f フラッシュ発光装置(警告発生部)
2 撮影部
4 逆走判定部
5 出力部A(逆走出力部)
6 入力部A(撮影入力部)
7 駆動部A(撮影駆動部)
10 入力部B(注意喚起入力部)
11 駆動部B(注意喚起駆動)
12 通過判定部
13 出力部B(注意喚起出力部)
15 警告音発生装置(警告発生部)
16 警告音発生装置(警告発生部)
19 注意喚起装置
61 注意喚起表示(警告表示)
9 LED(順走車報知部)
10a 表示パネル(順走車報知部)
10b 表示パネル(順走車報知部)
b バー
Cg 逆走車
G1 撮影画像(撮影部にて撮影した画像)
G2 撮影画像(逆走車を特定する画像)
p1、p2 表示パネル(警告表示部)
S 車両逆走防止システム
s 車体
sp ナンバープレート(逆走車を特定)
【技術分野】
【0001】
本発明は、高速道路におけるパーキングエリア、サービスエリアなどの一方通行の出入り口における車両の逆走を検出し、逆走する車両を特定できる車両逆走防止システムおよび車両逆走防止方法に関する。
【背景技術】
【0002】
従来、車両の逆走(走行路の進行方向と反対向きの走行)による重大事故を防ぐ方法として、走行路の撮影画像から逆走判定に有効な特徴となる情報を抽出し、車両が逆走しているか否かの逆走判定を行う車両逆走検知装置がある。例えば、特許文献1には、走行する車のナンバープレートを撮影できるようにカメラを設置し、撮影した画像から逆走判定を行う車両逆走検知装置が記載されている。逆走判定は、車両の撮影画像からナンバープレートを認識し、ナンバープレートの時間的(経時的)な位置変化により移動方向を求め、車両が逆走しているか否かを判定する。この車両逆走検知装置はナンバープレートを認識するため、車両を特定することが可能である。
【0003】
一方、特許文献2には、車体の時間的(経時的)な移動変化から逆走判定を行う。
これらの方法は、車両に何らの装置も取り付ける必要がないため、運転手が別途、逆走判定を利用するための専用機器を車両に取り付ける時間や費用負担も発生しない。また、高速道路を利用する何れの車両に対しても、逆走判定を適用することができ、逆走事故防止としての効果は期待できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−234486号公報
【特許文献2】特開平10−269492号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、従来の技術では、車体の撮影画像から逆走判定に使用する有効な特徴となる情報として、車体に必ずついているナンバープレートの移動方向から判定する局所的な情報を活用した場合と、車体の移動方向から判定する全体的な情報を活用した場合が存在するが、それぞれ次の長所と短所がある。
【0006】
特許文献1のナンバープレートの移動方向から判定する場合、ナンバープレートを撮影するため、車両の逆走判定を行うとともに逆走車両の特定が可能である。さらに、通過する車体のナンバープレートを撮影するため、逆走車以外の順走車を含む全ての車体の特定を行うことができる。
【0007】
しかし、車体の局所的なナンバープレートを撮影するため、カメラの撮影範囲は狭い。例えば、通過する車体が少ない場所や、注意散漫な逆走車に対して逆走を気づかせる仕組みを設けることで、逆走現象が改善される場合、カメラの撮影範囲をナンバープレートの撮影に特化し狭めることは、固定カメラの広域を撮影できる機能を活かしきれていない。
【0008】
一方、特許文献2の車体の移動方向から逆走を判定する場合、車体以外にも周辺の環境、状況をカメラにて撮影することが可能であるため、逆走車を撮影する以外にも広域の監視を行うことができる。しかし、大きく車体全体を撮影するため、ナンバープレートに絞った撮影と比較するとナンバープレートを明確(鮮明)に撮影することが難しい。逆走車の中には、故意に車両を逆走させる運転者も存在するため、ただ逆走判定を行うだけでなく車両を特定する価値は大きい。
【0009】
本発明の目的は、1台のカメラを用いて逆走判定を行うとともに逆走車がない場合には広域監視に活用でき、故意に逆走する車両に対しては当該車両を特定できる車両逆走防止システムおよび車両逆走防止方法を提供する。
【課題を解決するための手段】
【0010】
上記目的を達成すべく、第1の本発明に関わる車両逆走防止システムは、車体を撮影する撮影部と、前記撮影部にて撮影した画像から逆走車の有無を判定する逆走判定部と、前記撮影部の姿勢、およびズーム、フォーカスを調整する撮影駆動部と、逆走車に逆走である旨の注意を喚起する注意喚起装置と、前記注意喚起装置に対して前記逆走車の有無を送信する逆走出力部と、前記注意喚起装置から信号を受信する撮影入力部とを備え、前記撮影入力部が注意喚起無視の信号を受信した場合、前記撮影駆動部にて前記撮影部を調整し、前記撮影部にて逆走車を特定する画像を撮影している。
【0011】
第2の本発明に関わる車両逆走防止方法は、車両の逆走を防止する車両逆走防止方法であって、撮影部で車体を撮影した画像から逆走車の有無を判定し、逆走車に逆走である旨の注意を喚起し、前記逆走車が注意を無視した場合、前記撮影部の姿勢、およびズーム、フォーカスを調整し、前記撮影部で当該逆走車を特定する画像を撮影している。
【発明の効果】
【0012】
本発明によれば、1台のカメラを用いて逆走判定を行うとともに逆走車がない場合には広域監視に活用でき、故意に逆走する車両に対しては当該車両を特定できる車両逆走防止システムおよび車両逆走防止方法を実現できる。
【図面の簡単な説明】
【0013】
【図1】本発明に係る実施形態の車両逆走防止システムの構成概要を示す上面図である。
【図2】実施形態の車両逆走防止システムの機能ブロック図である。
【図3】実施形態の車両逆走防止システムの近傍を示す斜視図である。
【図4】(a)は実施形態の撮影部にて撮影された画像を示す図であり、(b)〜(d)は実施形態の逆走車が撮影部にて撮影された画像を示す図である。
【図5】実施形態の撮影部のカメラを逆走車の車体のナンバープレートを撮影できる位置に移動した場合の撮影画像を示す図である。
【図6】(a)、(b)は実施形態の逆走である旨の警告メッセージを出力した表示パネルを示す図である。
【図7】実施形態の逆走車有りと判定された結果、注意喚起装置のバーが降りた状態を示す斜視図である。
【図8】実施形態の車両逆走防止システムの動作手順を示す動作フロー図である。
【図9】実施形態のカメラがパーキングエリアを広域に撮影し監視を行っている状態を示す図である。
【図10】(a)、(b)は実施形態の順走車に対して警告を発生する装置を適用した例を示す上面図である。
【発明を実施するための形態】
【0014】
以下、本発明の実施形態について添付図面を参照して説明する。
図1は、本発明に係る実施形態の車両逆走防止システムの構成概要を示す上面図である。
実施形態の車両逆走防止システムSは、高速道路などの本線r1と、サービスエリアもしくはパーキングエリアPとを接続する一方通行路r2のパーキングエリアPの近傍に設置される。以下では、パーキングエリアPを例に説明する。なお、図1の一方通行路r2は、本線r1からパーキングエリアPに向けて一方通行になっているものとする。
【0015】
車両逆走防止システムSは、本線r1からパーキングエリアPに進入するための一方通行路r2に向け逆走する車体s(逆走車Cg)を撮影するカメラ2cと、カメラ2cで撮影した車体sの移動方向から逆走を判定する逆走判定手段(後記の逆走判定部4)と、逆走判定後に逆走車Cgに対して注意を喚起するためにバーb、bを降下する手段(後記の図2の駆動部B11a)とを具備している。
なお、図1では、バーb、bを降下した状態を示している。
【0016】
逆走車Cg(車体s)がバーb、bを越えて(強行突破して)一方通行路r2に進入した場合、故意に逆走させている運転者と判断して、カメラ2cの姿勢を車両特定用(ナンバープレート撮影用)に設定し(図5参照)、予め定めておいた(既定の)姿勢およびズーム、フォーカスのモードに移行し、車体sのナンバープレートsp(図5参照)を撮影し、逆走車Cgを特定する。
【0017】
図2は、実施形態の車両逆走防止システムの機能ブロック図である。
車両逆走防止システムSは、主要機能として、逆走車Cgを発見するとともに逆走車Cgを特定する撮影装置1と、逆走車Cgに対して逆走している旨の注意を喚起する注意喚起装置19とを備えている。
撮影装置1は、撮影部2のカメラ2c(図1参照)と、逆走車Cgを検知する検知エリアを撮影画像に設定する検知エリア設定部3と、検知エリアで逆走車Cgを判定する逆走判定部4と、注意喚起装置19に制御信号(逆走車有りの信号)を出力する出力部A5とを具える。
【0018】
さらに、撮影装置1は、注意喚起装置19から制御信号(逆走車の逆走注意無視の信号)が入力される入力部A6と、撮影部2を姿勢およびズーム、フォーカスを駆動(調整)し所定のモードに設定する駆動部A7と、撮影画像などの各種データを記録する記録部8と、逆走車Cgのナンバープレートspの車両番号を解析する解析部9とを有している。
【0019】
ここで、撮影部2のカメラ2cはパーキングエリアPを広く撮影する広域監視と、逆走車Cgのナンバープレートspを撮影するナンバープレート撮影との2つの撮影モードを有している。
【0020】
注意喚起装置19は、撮影装置1から制御信号(逆走車有りの信号)を受信する入力部B10と、バーb、bの上下方向の揺動(約90度の回転運動)の開閉動作を行う駆動部B11aと、バーb、bの閉鎖時に逆走車Cgの通過を検知する検出部11bとを備えている。さらに、注意喚起装置19は、検出部11bからのセンサ信号を基に逆走車Cgが逆走の注意を無視したか否かを判定する通過判定部12と、撮影装置1に制御信号(逆走車の逆走注意無視の信号)を送信する出力部B13とを有している。
【0021】
図3は、車両逆走防止システムの近傍を示す斜視図である。図4は、逆走判定画像の様子を示す図であり、図4(a)は撮影部にて撮影された画像を示しており、図4(b)〜(d)は、逆走車が撮影部にて撮影された画像を示している。
図3に示すように、1台の車(車体s)が通過できる高さの位置に設置された撮影部2のカメラ2cにて撮影された撮影画像G1(図4(a)参照)から、逆走判定部4にて車体sの移動方向を演算し、パーキングエリアPから一方通行路r2に入る手前にて、逆走車Cgであるか否か判定する。
具体的には、逆走判定部4は、検知エリア設定部3が撮影画像G1(図4(a)参照)内に設定した逆走判定エリアG1aの矩形枠を、逆走判定を行うエリアとして、逆走しているか否かの判定を行う。なお、図4(a)の撮影画像G1には、車体sは映っていない。
【0022】
注意喚起装置19は、逆走車Cgに逆走の注意を喚起するためのバーb、bを備えている。逆走判定部4にて逆走と判定された場合、出力部A5を通して、注意喚起装置19内の入力部B10に信号を送信し、駆動部B11aを用いてバーb、bを、図1、図3に示すように、一方通行路r2に進入する手前に降ろし、逆走車Cgの進入を阻止する。
【0023】
通過判定部12は、降ろした(閉鎖した)バーb、bを逆走車Cg(車体s)が通過(強行突破)したか否かを、検出部11bの後記の各種センサで検出したセンサ信号を基に判定する。そして、車体sがバーb、bを通過したと判定した場合、出力部B13から撮影装置1の入力部A6に対して、強引に逆走車Cgが、降ろした(閉鎖した)バーb、bを通過したことを知らせる信号を送信する。
【0024】
撮影装置1は、逆走車Cgの車体sがバーb、bを通過した信号を、撮影装置1の入力部A6にて受信すると、駆動部A7は、撮影部2の姿勢およびズーム、フォーカスを予め設定した逆走車Cgのナンバープレートspを撮影できる位置(図5参照)に移動し、撮影部2のカメラ2cは、逆走車Cgの車体sのナンバープレートspを撮影する。図5は、撮影部のカメラを逆走車の車体のナンバープレートを撮影できる位置に移動した場合の撮影画像を示す図である。
撮影された画像は、記録部8(図2参照)に記録される。
【0025】
逆走車Cgのナンバープレートsp(図5参照)の撮影後、駆動部A7を用いて、撮影部2の姿勢およびズーム、フォーカスを元の逆走判定用の撮影位置(広域にパーキングエリアPを撮影する位置)に戻す。
図6(a)、(b)は、逆走である旨の警告メッセージを出力した表示パネルを示す図である。
逆走車Cgに逆走である旨気付かせる仕組みとしてバーb、b以外に、注意喚起装置19は、表示パネルp1、p2(図6参照)を逆走車Cgに対向するように設けて、警告メッセージ“逆送もどれ”の注意喚起表示61を出力してもよい。注意喚起表示61は、文字以外に光を点滅させて注意を喚起してもよい。
【0026】
図3の二点鎖線は、表示パネルp1を、カメラ2cを固着するゲートgに取着した場合を示している。または、表示パネルp2を注意喚起装置19のポスト19p1、19p2のパーキングエリアPの側に取着してもよい。或いは、警告用の構造物(図示せず)を一方通行路r2の路側帯に構築して、表示パネルp1、p2を取着してもよい。
【0027】
なお、表示パネルp1、p2は何れかを適用してもよいし、両方適用してもよい。この場合、駆動部B11aのバーb、bの上下動の制御を表示パネルp1、p2に警告を出力(表示)する制御に代替してもよい。
或いは、駆動部B11のバーb、bを上下動する制御および表示パネルp1、p2に警告を出力(表示)する制御の両制御を遂行するように構成してもよい。
【0028】
図7は、逆走車有りと判定された結果、注意喚起装置のバーが降りた状態を示す斜視図である。
注意喚起装置19のバーbは、ポスト19p1、19p2に下降状態(図7の実線)と上昇状態(図7の二点鎖線)との間を上下方向に揺動(約90度の回転運動)自在に設けられている。
【0029】
ポスト19p1、19p2には、それぞれバーb、bを、図7の2点鎖線で示す鉛直方向の上昇状態と、図7の実線で示す水平方向の下降状態との2つの状態に上下動させる駆動手段である駆動部B11aが内設されている。駆動部B11aは、モータ、減速機構、伝達機構などにより、モータの回転運動をバーbの上下の揺動運動(ほぼ90度の回転運動)に変換する。
【0030】
ポスト19p1には音(警告音や警告音声など)を発生する警告音発生装置15が設けられている。同様に、ポスト19p2には音(警告音や警告音声など)を発生する警告音発生装置16が設けられている。
通常時には、バーbは、駆動手段の駆動部B11aにより、図7の2点鎖線で示すように鉛直方向の上昇状態とされ、車両が一方通行路r2からパーキングエリアPに進入可能とされている。
【0031】
図1に示すように、撮影装置1の撮影部2のカメラ2cで逆走車Cgを撮影し逆走判定部4で逆走車有りと判定された場合、図7の実線で示すように、バーbは、駆動部B11aにより、図7の2点鎖線の状態から図7の実線の状態に水平方向に降下され、逆走車Cgに対して、車両のパーキングエリアPから一方通行路r2へ進入する手前で、注意喚起する(図3参照)。
【0032】
しかし、逆走車Cgのうちには、降下したバーb、bを強行突破して、パーキングエリアPから一方通行路r2へ進入することも想定されるため、バーb、bは、図7の矢印α1に示す稼動領域を有しており、水平方向に回動できるようにポスト19p1、19p2に弾性的に枢設されている。または、バーb、b自体を弾性材で形成して、弾性変形により稼動領域を形成してもよい。これにより、バーb、bは、逆走車Cgが強行突破した場合にも、破壊されない構造としている。
【0033】
また、強行突破した逆走車Cgに対して、警告音発生装置15、16から、警告音や警告音声を発生する。
バーb、bの各支持部には、バーb、bがそれぞれ強行突破されたことを、バーb、bの水平方向の回転運動を機械的または磁気的に検出する機械式センサや磁気式センサが配設されている。なお、バーb、bがそれぞれ強行突破されたことを検出できれば、光、静電容量などのその他のセンサを用いてもよい。
【0034】
或いは、逆走車Cgがポスト19p1、19p2の間を通過したことを検出するため、ポスト19p1、19p2の内方に向けて、反射型の赤外線センサや半導体のホトセンサを使用する透過型の赤外線センサを設置することも可能である。なお、逆走車Cgがポスト19p1、19p2の間を通過したことを検出できれば、赤外線センサ以外のセンサを用いてもよいことは勿論である。
【0035】
<車両逆走防止システムSの動作手順>
次に、車両逆走防止システムSの動作手順を時間経過に従って説明する。
図8は、車両逆走防止システムの動作手順を示す動作フロー図である。図9は、カメラ2cがパーキングエリアPを広域に撮影し監視を行っている状態を示す図である。
図9に示すように、撮影部2のカメラ2cはパーキングエリアPを広域に撮影し監視を行っている(図8のS101)。この場合、注意喚起装置19のバーb、bは、鉛直方向に上げられ、立位の状態にある。
【0036】
逆走判定部4は、パーキングエリアP内を1台の撮影部2のカメラ2cで広く撮影した撮影画像G1の逆走判定エリアG1aから、パーキングエリアPから高速道路などの本線r1に接続する一方通行路r2を逆走する車があるか否か判定する(逆走判定の詳細は後記)(S102)。
逆走車Cgが無い場合(S102でNo)、図8のS101に移行し、撮影部2のカメラ2cでの撮影によるパーキングエリアPの広域な監視を継続する。
【0037】
一方、逆走車Cg有りと判定された場合(S102でYes)、逆走車Cgに対して、逆走していることを気付かせるために撮影装置1の出力部A5から、注意喚起装置19の入力部B10に対して逆走車Cgの存在を知らせる信号を送信し(S103)、注意喚起装置19の駆動部B11aを用いて、バーb、bを立位の状態(図7の2点鎖線参照)から、一方通行路r2への進入手前の位置に降下する(図7の2点実線参照)(S104)。
【0038】
続いて、通過判定部12は、逆走車Cgがバーb、bを強引に通過(強行突破)したかを、検出部11bのセンサ(機械式センサや磁気式センサ、赤外線センサなど)で検出して検出部11bから送信されるセンサ信号を基に判定する(S105)。
逆走車Cgがバーb、bを強引に通過(強行突破)しない場合には(S105でNo)、S101に移行し、撮影部2のカメラ2cを、駆動部A7で駆動することなく、広域監視を続行する。
【0039】
仮に、逆走車Cgがバーbを強引に通過(強行突破)すると、通過判定部12にて通過し たことが判定され(S105でYes)、注意喚起装置19の出力部B(13)から、撮影装置1の入力部A6に対して車体(車両)通過信号を送信する(S106)。なお、逆走車Cgに注意を喚起するために撮影装置1にフラッシュ発光装置1fを設け、S106において、バーb、bを強行突破する車体s(逆走車Cg)に対して、強烈なフラッシュ発光を行ってもよい。
【0040】
また、図10(a)に示す一方通行路r1に「逆走注意!」を描いたLED(Light Emitting Diode)29を埋設し、逆走車Cgが発生している最中は、図10(b)に示すように、埋設したLED29を点灯して「逆走注意!」を表示し、順走車Cjに対して警告を発生する装置を用いてもよい。或いは、一方通行路r1近くに、表示パネル10a、10bを立設して、縦書きで「逆走注意!」を、LEDを点灯させて表示し、順走車Cjに逆走車Cgが有り危険である旨の注意を促すようにしてもよい。または、音声で「逆走注意!」をアナウンスしたり、これらを組み合わせて、順走車Cjに逆走車有りの注意を喚起してもよい。
【0041】
図8のS107で、撮影装置1の入力部A6が車体(車両)通過信号を受信すると、逆走車Cgを特定するため、駆動部A7は、撮影部2のカメラ2cを予め設定した逆走車Cgのナンバープレートspを撮影する逆走車Cgの特定用の姿勢、およびズーム、フォーカス(車両特定用の撮影範囲の撮影画像G2)(図5参照)に駆動(調整)する。
【0042】
これにより、撮影部2のカメラ2cは、図5に示す車両特定用の撮影範囲にて、逆走車Cgのナンバープレートspを撮影する(S108)。図1、図3に示す撮影装置1とバーb、bとの位置関係は、車両逆走防止システムSの設置環境や状況に適合させて適宜調整してよい。
【0043】
S108の後、S101に移行するとともに、S109で逆走車Cgのナンバープレートspの“車両ナンバー”を解析する。
S109において、解析部9は、まず、S108で撮影した撮影画像G2から、ナンバープレートspの形がある画像を検索し、そして、明確に(くっきりと)ナンバープレートspが撮影されている撮影画像を特定する。続いて、解析部9は、特定した撮影画像のナンバープレートspの“車両ナンバー”を文字認識などにより求める。なお、求めた逆走車Cgの“車両ナンバー”は記録部8に記録される。
【0044】
<逆走判定部4での逆走車Cgの判定>
次に、図8のS102で行われる撮影装置1の逆走判定部4での逆走車Cgの判定方法について説明する。
車両逆走防止システムSでは、撮影装置1の逆走判定部4が、撮影部2のカメラ2cにて撮影した撮影画像G1(図4参照)の移動物体(車体s)の移動方向により逆走判定を行う。逆走判定を行う範囲は、撮影装置1を設置した際に、撮影画像G1中にあらかじめ検知エリア設定部3にて、ユーザが任意に設定した逆走判定エリアG1a(図4(a)参照)内で行う。そのため、逆走判定エリアG1a以外の移動物体(車体s)の影響を受けることなく逆走判定を行うことができる。
【0045】
図4の場合、図4(a)のT画像では、撮影部2のカメラ2cでパーキングエリアP内を撮影し、広域に監視を行っている。
図4(b)のT+1画像では、逆走車Cgが存在するが、逆走判定エリアG1aの枠外のため逆走判定は行っていない状態にある。
図4(c)のT+2画像は、逆走判定エリアG1aの枠内に車体s(逆走車Cg)が存在するため、次の図4(d)のT+3画像を用いて、車体s(逆走車Cg)の移動方向を求めて逆走判定を行う。
【0046】
具体的には、逆走判定部4は、図4(c)のT+2画像の車体sが、時間経過に従い、図4(d)のT+3画像の車体sのように下方に移動する場合には、撮影部2のカメラ2cに接近したため、車体sは逆走車Cgであると判定する。
一方、逆走判定部4は、図4(c)のT+2画像の車体sが、時間経過に従った図4(d)のT+3画像で、上方に移動する場合には、撮影部2のカメラ2cから遠ざかっているため、車体sは逆走車Cgでないと判定する。
なお、図4(c)のT+2画像の車体sが、時間経過に従い、大きくなる場合には逆走と判定する一方、小さくなる場合には順走と判定してもよい。
【0047】
上記構成によれば、故意に逆走運転をする運転者と逆走していることに気付いていない著しく注意力が低下している運転者とを判別して、撮影部2を状況ごとに制御することで、逆走判定時と車両(逆走車Cg)特定時の異なる2つの状況において、1台の撮影部2のカメラ2cで広域監視および逆走判定と逆走車Cgの車両特定とを遂行することが可能である。
また、車体sには、何も取り付ける必要がない。
【0048】
従って、高速道路におけるパーキングエリア、サービスエリアの一方通行の出入り口における逆走を検出し、故意に逆走運転をする運転者に対しては、車両(逆走車Cg)特定を行い、さらに逆走車Cgが存在しない場合には、周辺の状況を監視する低コストの車両逆走防止システムを実現できる。
【0049】
なお、前記実施形態では、高速道路などの本線r1と、サービスエリアもしくはパーキングエリアPとを接続する一方通行路r2を例示して説明したが、一方通行の道路であれば、高速道路などへ入る道路、高速道路などから出る道路など、限定されることなく幅広く適用可能である。
【符号の説明】
【0050】
1 撮影装置(撮影部、逆走判定部、逆走出力部、撮影入力部、撮影駆動部)
1f フラッシュ発光装置(警告発生部)
2 撮影部
4 逆走判定部
5 出力部A(逆走出力部)
6 入力部A(撮影入力部)
7 駆動部A(撮影駆動部)
10 入力部B(注意喚起入力部)
11 駆動部B(注意喚起駆動)
12 通過判定部
13 出力部B(注意喚起出力部)
15 警告音発生装置(警告発生部)
16 警告音発生装置(警告発生部)
19 注意喚起装置
61 注意喚起表示(警告表示)
9 LED(順走車報知部)
10a 表示パネル(順走車報知部)
10b 表示パネル(順走車報知部)
b バー
Cg 逆走車
G1 撮影画像(撮影部にて撮影した画像)
G2 撮影画像(逆走車を特定する画像)
p1、p2 表示パネル(警告表示部)
S 車両逆走防止システム
s 車体
sp ナンバープレート(逆走車を特定)
【特許請求の範囲】
【請求項1】
車体を撮影する撮影部と、
前記撮影部にて撮影した画像から逆走車の有無を判定する逆走判定部と、
前記撮影部の姿勢、およびズーム、フォーカスを調整する撮影駆動部と、
逆走車に逆走である旨の注意を喚起する注意喚起装置と、
前記注意喚起装置に対して前記逆走車の有無を送信する逆走出力部と、
前記注意喚起装置から信号を受信する撮影入力部とを備え、
前記撮影入力部が注意喚起無視の信号を受信した場合、前記撮影駆動部にて前記撮影部を調整し、前記撮影部にて逆走車を特定する画像を撮影する
ことを特徴とする車両逆走防止システム。
【請求項2】
請求項1に記載の車両逆走防止システムにおいて、
前記注意喚起装置は、
前記逆走出力部からの逆走車有りの信号を受信する注意喚起入力部と、
前記注意喚起入力部にて逆走車有りの信号を受信した場合に逆走車に対して注意喚起するためにバーを降ろす注意喚起駆動部と、
前記逆走車の車体が前記バーを強行突破したか否かを判定する通過判定部と、
前記逆走車の車体がバーを強行突破した旨の信号を前記撮影入力部に送信する注意喚起出力部とを有する
ことを特徴とする車両逆走防止システム。
【請求項3】
請求項1または請求項2に記載の車両逆走防止システムにおいて、
前記撮影入力部が前記注意喚起無視の信号を受信した場合、
前記撮影駆動部は、予め設定した位置情報に従い、前記撮影部の姿勢、およびズーム、フォーカスを調整し、前記撮影部が前記注意喚起無視の車体のナンバープレートを撮影する
ことを特徴とする車両逆走防止システム。
【請求項4】
請求項1から請求項3のうちの何れか一項に記載の車両逆走防止システムにおいて、
前記前記撮影部が前記注意喚起無視の車体のナンバープレートを撮影した後、前記撮影駆動部は、前記撮影部の姿勢、およびズーム、フォーカスを調整し、前記撮影部を車体を撮影するモードに復帰させる
ことを特徴とする車両逆走防止システム。
【請求項5】
請求項1から請求項4のうちの何れか一項に記載の車両逆走防止システムにおいて、
前記注意喚起装置は、
前記撮影入力部にて前記注意喚起無視の情報を受信した場合、逆走車に対して注意喚起する警告音または警告光を発生する警告発生部、または、警告表示を行う警告表示部を
有することを特徴とする車両逆走防止システム。
【請求項6】
請求項1から請求項5のうちの何れか一項に記載の車両逆走防止システムにおいて、
前記撮影入力部にて前記注意喚起無視の情報を受信した場合に順走車に逆走車が有る旨を報知する順走車報知部を
備えることを特徴とする車両逆走防止システム
【請求項7】
車両の逆走を防止する車両逆走防止方法であって、
撮影部で車体を撮影した画像から逆走車の有無を判定し、
逆走車に逆走である旨の注意を喚起し、
前記逆走車が注意を無視した場合、前記撮影部の姿勢、およびズーム、フォーカスを調整し、
前記撮影部で当該逆走車を特定する画像を撮影する
ことを特徴とする車両逆走防止方法。
【請求項8】
請求項7に記載の車両逆走防止方法において、
逆走車有りと判定した場合、当該逆走車に対して注意喚起するためにバーを降ろし、
前記逆走車の車体が前記バーを強行突破したか否かを判定する
ことを特徴とする車両逆走防止方法。
【請求項9】
請求項7または請求項8に記載の車両逆走防止方法において、
前記逆走車が前記注意を無視した場合、予め設定した位置情報に従い、前記撮影部の姿勢、およびズーム、フォーカスを調整し、当該撮影部が前記逆走車のナンバープレートを撮影する
ことを特徴とする車両逆走防止方法。
【請求項1】
車体を撮影する撮影部と、
前記撮影部にて撮影した画像から逆走車の有無を判定する逆走判定部と、
前記撮影部の姿勢、およびズーム、フォーカスを調整する撮影駆動部と、
逆走車に逆走である旨の注意を喚起する注意喚起装置と、
前記注意喚起装置に対して前記逆走車の有無を送信する逆走出力部と、
前記注意喚起装置から信号を受信する撮影入力部とを備え、
前記撮影入力部が注意喚起無視の信号を受信した場合、前記撮影駆動部にて前記撮影部を調整し、前記撮影部にて逆走車を特定する画像を撮影する
ことを特徴とする車両逆走防止システム。
【請求項2】
請求項1に記載の車両逆走防止システムにおいて、
前記注意喚起装置は、
前記逆走出力部からの逆走車有りの信号を受信する注意喚起入力部と、
前記注意喚起入力部にて逆走車有りの信号を受信した場合に逆走車に対して注意喚起するためにバーを降ろす注意喚起駆動部と、
前記逆走車の車体が前記バーを強行突破したか否かを判定する通過判定部と、
前記逆走車の車体がバーを強行突破した旨の信号を前記撮影入力部に送信する注意喚起出力部とを有する
ことを特徴とする車両逆走防止システム。
【請求項3】
請求項1または請求項2に記載の車両逆走防止システムにおいて、
前記撮影入力部が前記注意喚起無視の信号を受信した場合、
前記撮影駆動部は、予め設定した位置情報に従い、前記撮影部の姿勢、およびズーム、フォーカスを調整し、前記撮影部が前記注意喚起無視の車体のナンバープレートを撮影する
ことを特徴とする車両逆走防止システム。
【請求項4】
請求項1から請求項3のうちの何れか一項に記載の車両逆走防止システムにおいて、
前記前記撮影部が前記注意喚起無視の車体のナンバープレートを撮影した後、前記撮影駆動部は、前記撮影部の姿勢、およびズーム、フォーカスを調整し、前記撮影部を車体を撮影するモードに復帰させる
ことを特徴とする車両逆走防止システム。
【請求項5】
請求項1から請求項4のうちの何れか一項に記載の車両逆走防止システムにおいて、
前記注意喚起装置は、
前記撮影入力部にて前記注意喚起無視の情報を受信した場合、逆走車に対して注意喚起する警告音または警告光を発生する警告発生部、または、警告表示を行う警告表示部を
有することを特徴とする車両逆走防止システム。
【請求項6】
請求項1から請求項5のうちの何れか一項に記載の車両逆走防止システムにおいて、
前記撮影入力部にて前記注意喚起無視の情報を受信した場合に順走車に逆走車が有る旨を報知する順走車報知部を
備えることを特徴とする車両逆走防止システム
【請求項7】
車両の逆走を防止する車両逆走防止方法であって、
撮影部で車体を撮影した画像から逆走車の有無を判定し、
逆走車に逆走である旨の注意を喚起し、
前記逆走車が注意を無視した場合、前記撮影部の姿勢、およびズーム、フォーカスを調整し、
前記撮影部で当該逆走車を特定する画像を撮影する
ことを特徴とする車両逆走防止方法。
【請求項8】
請求項7に記載の車両逆走防止方法において、
逆走車有りと判定した場合、当該逆走車に対して注意喚起するためにバーを降ろし、
前記逆走車の車体が前記バーを強行突破したか否かを判定する
ことを特徴とする車両逆走防止方法。
【請求項9】
請求項7または請求項8に記載の車両逆走防止方法において、
前記逆走車が前記注意を無視した場合、予め設定した位置情報に従い、前記撮影部の姿勢、およびズーム、フォーカスを調整し、当該撮影部が前記逆走車のナンバープレートを撮影する
ことを特徴とする車両逆走防止方法。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−45249(P2013−45249A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−181893(P2011−181893)
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]