
車両通行判定装置、交通信号制御装置、コンピュータプログラム、車両通行判定方法、及び交通信号制御方法
【課題】災害時に車両の通行が困難になった道路区間を迅速に把握することができるようにする。
【解決手段】本発明の車両通行判定装置は、所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する第1判定部411Aと、前記道路区間に設置された複数の車両感知器3のうちの所定数以上の車両感知器3から得られる感知情報S4に異常が発生しているか否かを判定する第2判定部411Bと、前記道路区間を走行するプローブ車両5から送信されたプローブ情報S3が存在するか否かを判定する第3判定部411Cと、第1判定部411A及び第2判定部411Bの判定結果のうちのいずれか一方の判定結果が肯定的であって、かつ第3判定部411Cの判定結果が否定的である場合に、前記道路区間における車両の通行を不可と判定する最終判定部411Dとを備えている。
【解決手段】本発明の車両通行判定装置は、所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する第1判定部411Aと、前記道路区間に設置された複数の車両感知器3のうちの所定数以上の車両感知器3から得られる感知情報S4に異常が発生しているか否かを判定する第2判定部411Bと、前記道路区間を走行するプローブ車両5から送信されたプローブ情報S3が存在するか否かを判定する第3判定部411Cと、第1判定部411A及び第2判定部411Bの判定結果のうちのいずれか一方の判定結果が肯定的であって、かつ第3判定部411Cの判定結果が否定的である場合に、前記道路区間における車両の通行を不可と判定する最終判定部411Dとを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両通行判定装置、交通信号制御装置、コンピュータプログラム、車両通行判定方法、及び交通信号制御方法に関する。
【背景技術】
【0002】
交通信号機に対する信号制御方式を、信号制御パラメータ(スプリット、サイクル長及びオフセット等)の設定方式の視点で大別すると、時間帯に応じて信号制御パラメータを設定する定周期制御と、交通状況に応じて信号制御パラメータを設定する交通感応制御の2種類がある。
このうち、後者の交通感応制御は、端末の交通信号制御機ごとに行う端末感応制御と、路線系統制御或いは面制御される複数の交差点を対象に信号制御パラメータを変化させる中央感応制御に分類される。
【0003】
上記中央感応制御は、交通流の変動に対応した高度な系統制御や広域制御(面制御)を行えるため、交通量の時間変動が激しくかつ交通量が多い道路に適用される。
かかる中央感応制御では、車両感知器情報に基づいてその時の交通状態に最適な一つのプログラムを選択するプログラム選択制御や、車両感知器情報に基づいてオンラインで信号制御パラメータや信号表示の切り替えタイミングを決定するプログラム形成制御を行うことにより、交通処理効率の向上を目指している(非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】「改訂 交通信号の手引き」 編集・発行 社団法人 交通工学研究会(16〜18頁、83〜87頁)
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、地震等の災害が発生したときに、ある道路区間において道路の損壊や道路に隣接する建物の損壊により、車両の通行が困難になる場合がある。このような場合に、通行が困難になった道路区間に車両が流入することは非常に危険である。また、その道路区間に車両が流入することによって渋滞が発生すると、緊急車両の通行が困難になり、人命救助や復旧活動に支障を来すことになる。
そこで、前記中央感応制御を行う交通管制センターにおいて、災害現場からの通報等により災害情報を入手することによって、通行が困難な道路区間に車両が流入するのを規制する交通規制制御(流入規制制御)を行うことができる。しかし、大規模災害時には、車両通行が困難な道路区間を特定するのに多大な時間を要することから、交通規制制御をより迅速に行うことができる方策が要望されている。
【0006】
本発明は、このような実情に鑑み、災害時に車両の通行が困難になった道路区間を迅速に把握することができるようにすることを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明の車両通行判定装置は、所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する第1判定部と、前記道路区間に設置された複数の車両感知器のうちの所定数以上の車両感知器から得られる感知情報に異常が発生しているか否かを判定する第2判定部と、前記道路区間を走行するプローブ車両から送信されたプローブ情報が存在するか否かを判定する第3判定部と、前記第1判定部及び第2判定部の判定結果のうちのいずれか一方の判定結果が肯定的であって、かつ前記第3判定部の判定結果が否定的である場合に、前記道路区間における車両の通行を不可と判定する最終判定部とを備えていることを特徴とする。
【0008】
本発明の車両通行判定装置によれば、所定の道路区間に設置された所定数以上の交通設備に異常が発生していると判定された場合、又は前記道路区間に設置された所定数以上の車両感知器から得られる感知情報に異常が発生していると判定された場合であって、かつ前記道路区間を走行するプローブ車両から送信されたプローブ情報が存在しないと判定された場合に、前記道路区間における車両の通行を不可と判定するようにしたので、災害時に車両の通行が困難になった道路区間を迅速に把握することができる。
【0009】
(2)前記第1判定部は、前記所定数以上の交通設備から異常発生情報を取得した場合、又は前記所定数以上の交通設備と通信することができない場合に、当該交通設備に異常が発生していると判定することが好ましい。
この場合、所定数以上の交通設備に異常が発生しているか否かの判定を正確に行うことができる。
【0010】
(3)前記第2判定部は、前記感知情報に含まれる車両台数がいずれも所定範囲内に含まれない場合に、当該感知情報に異常が発生していると判定することが好ましい。
この場合、所定数以上の車両感知器から得られる感知情報に異常が発生しているか否かの判定を正確に行うことができる。
【0011】
(4)他の観点からみた本発明は、前記(1)に記載の車両通行判定装置が、前記道路区間における車両の通行を不可と判定した場合に、当該道路区間への車両の流入を規制する信号制御を行う流入規制制御部を備えていることを特徴とする交通信号制御装置である。
本発明の交通信号制御装置によれば、流入規制制御部により車両通行判定装置が車両の通行を不可と判定した道路区間への車両の流入を規制することができるため、その周辺道路を走行する車両の安全性を確保することができる。
【0012】
(5)前記流入規制制御部は、車両の流入が規制されている前記道路区間において実際に車両の通行が可能である情報を取得した場合に、前記信号制御を解除することが好ましい。
この場合、車両の流入が規制されている道路区間において、実際に車両の通行が可能であるにも関わらず、前記信号制御が長期間に亘って継続されるのを抑制することができる。
【0013】
(6)更に他の観点から見た本発明は、コンピュータを、前記(1)に記載の車両通行判定装置として機能させるためのコンピュータプログラムである。
【0014】
(7)更に他の観点から見た本発明は、コンピュータを、前記(4)に記載の交通信号制御装置として機能させるためのコンピュータプログラムである。
【0015】
(8)更に他の観点から見た本発明は、所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する第1判定ステップと、前記道路区間に設置された複数の車両感知器のうちの所定数以上の車両感知器から得られる感知情報に異常が発生しているか否かを判定する第2判定ステップと、前記道路区間を走行するプローブ車両から送信されたプローブ情報が存在するか否かを判定する第3判定ステップと、前記第1判定ステップ及び第2判定ステップの判定結果のうちのいずれか一方の判定結果が肯定的であって、かつ前記第3判定ステップの判定結果が肯定的である場合に、前記道路区間における車両の通行を不可と判定する最終判定ステップと、を含むことを特徴とする車両通行判定方法である。
【0016】
(9)更に他の観点から見た本発明は、前記(8)に記載の車両通行判定方法により、前記道路区間における車両の通行を不可と判定した場合に、当該道路区間への車両の流入を規制するように信号制御を行うことを特徴とする交通信号制御方法である。
【発明の効果】
【0017】
本発明によれば、災害時に車両の通行が困難になった道路区間を迅速に把握することができる。
【図面の簡単な説明】
【0018】
【図1】交通信号制御システムの概要を示す全体構成図である。
【図2】交通信号機の構成を示す道路平面図である。
【図3】中央装置の内部構成を示す機能ブロック図である。
【図4】交通信号制御機の内部構成を示す機能ブロック図である。
【図5】車両通行判定部の内部構成を示す機能ブロック図である。
【図6】車両通行判定部の判定処理手順を示すフローチャートである。
【図7】流入規制制御部により信号制御された場合の一例を示す図である。
【発明を実施するための形態】
【0019】
〔システムの全体構成〕
以下、本発明の実施の形態を図面に基づいて説明する。
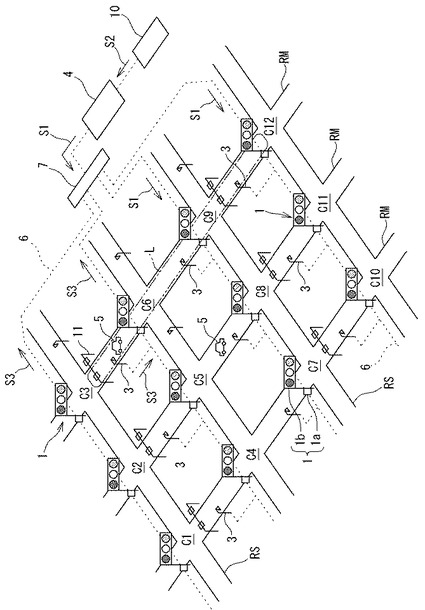
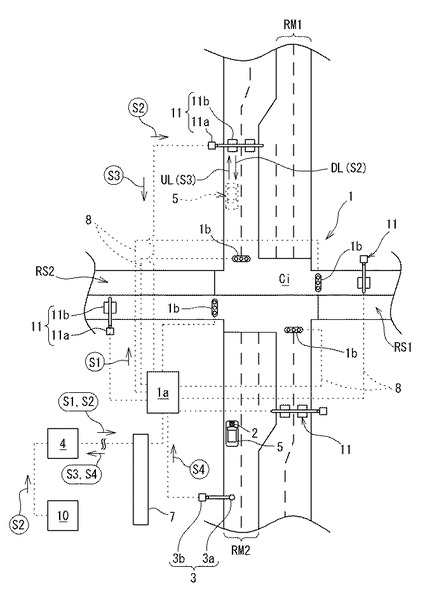
図1は、本発明の車両通行判定装置及び交通信号制御装置を採用した交通信号制御システムの全体構成図である。また、図2は、同システムの交通信号機の構成を示す道路平面図である。
図1及び図2に示すように、本実施形態の交通信号制御システムは、交通信号機1、車載装置2、車両感知器3、中央装置4、車載装置2を搭載したプローブ車両5(以下、単に車両5という場合がある。)、VICS(Vehicle Information and Communication System:「VICS」は登録商標)センター10、光ビーコン11などを含む。
【0020】
図1及び図2において、符号S1〜S4で示される各種の信号又は情報のうち、S1は中央装置4が生成する、交通信号機1の信号灯色の切り替えタイミングを制御するための信号制御指令である。
また、S2はVICSセンター10が生成するVICS情報である。このVICS情報S2には、渋滞情報、リンク旅行時間、事故・故障車・工事情報、速度規制・車線規制情報、駐車場の位置、駐車場・サービスエリア・パーキングエリアの満車・空車情報などが含まれている。
【0021】
さらに、S3は、車載装置2を搭載した車両(プローブ車両)5が生成するプローブ情報であり、このプローブ情報S3は、走行中の車両5の所定時間又は距離ごとの位置、速度及び時刻等が含まれている。S4は車両感知器3の感知情報である。
【0022】
図1に示すように、交通信号制御システムにおいて、各交通信号機1は、複数の交差点Ci(i=1〜12)のそれぞれに設置され、電話回線等の通信回線6を介してルータ7に接続されている。
このルータ7は交通管制センター内の中央装置4に接続され、中央装置4は自装置が管轄する制御エリアに含まれる、各交差点Ciの交通信号制御機1aとLAN(Local Area Network)を構成している。
【0023】
従って、中央装置4は各交通信号制御機1aと双方向通信が可能であり、各交通信号機1は他の交通信号機1とも双方向通信が可能である。なお、中央装置4は、交通管制センターではなく道路上に設置してもよい。
また、図1では、図示を簡略化するために、各交差点Ciに信号灯器1bが1つだけ描写されているが、実際の交差点Ciには、例えば図2に示すように、互いに交差する道路の上り下り用として4つの信号灯器1bが設置されている。
【0024】
車両感知器3は、ループ式、超音波式、光学式、画像式等とすることができ、交差点Ciに流入する車両を感知する。図2において、車両感知器3は、対応する交差点Ciの上流側の道路に設置されており、感知ヘッド3aと感知器制御部3bとを有している。感知器制御部3bは、感知ヘッド3aの感知エリアを通過した車両の台数や当該車両の速度などを求めることができる。また、感知器制御部3bは、通信回線8を介して交通信号制御機1aと繋がっており、求められた車両台数及び車両速度等を含む情報(感知情報S4)は、交通信号制御機1aで中継され、通信回線6を介して中央装置4に送信される。
【0025】
図2に示すように、光ビーコン11は、道路脇の支柱に取り付けられたビーコン制御機11aと、その支柱の上端部から道路側に延びる梁材に取り付けられた1つ又は複数のビーコンヘッド(投受光器:以下、単に「ヘッド」という。)11bとを備えている。
ビーコン制御機11aは、通信回線8を通じて交通信号制御機1aと双方向通信が可能である。ヘッド11bは道路の車線数だけ設けられ、その車線の直上に配置されている。また、各ヘッド11bは発光素子と受光素子を内部に有する。
【0026】
これらの素子が発光又は受光することで通信可能となる道路上の範囲(通信領域)は、ヘッド11bの直下よりもやや上流に設定されている。車載装置2は、その通信領域を通過する間に、ヘッド11bとの間でアップリンクULとダウンリンクDLの送受信が可能である。
ビーコン制御機11aは、交通信号制御機1aを通じて受信したVICS情報S2を車載装置2に送信するダウンリンクDLに含めることができる。また、車載装置2が送信するアップリンクULには、プローブ情報S3が含まれており、このプローブ情報S3は交通信号制御機1aを介して中央装置4に転送される。
【0027】
〔中央装置〕
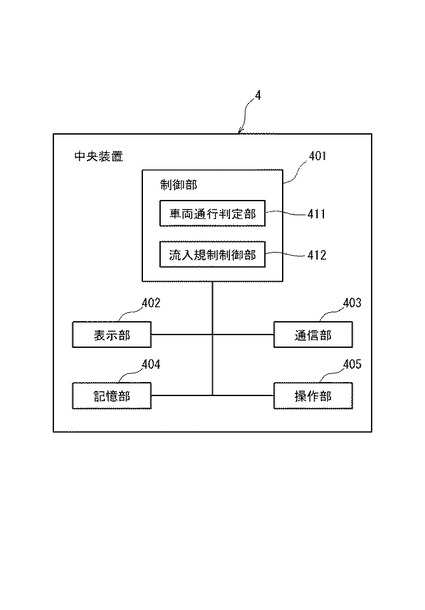
図3は、本発明の交通信号制御装置を構成する中央装置4の内部構成を示す機能ブロック図である。
図3に示すように、中央装置4は、制御部401、表示部402、通信部403、記憶部404及び操作部405を含んでいる。
中央装置4の制御部401は、ワークステーション(WS)やパーソナルコンピュータ(PC)等よりなり、交通信号機1や車両感知器3等からの各種の交通情報の収集・処理(演算)・記録、信号制御及び情報提供を統括的に行う。制御部401は、内部バスを介して上記ハードウェア各部と繋がっており、これら各部の動作も制御する。
【0028】
中央装置4の制御部401は、自身のネットワークに属する交差点Ciの交通信号機1に対して、同一道路上の交通信号機1群を調整する系統制御や、この系統制御を道路網に拡張した広域制御(面制御)を行うものであり、交通状況に応じて信号制御パラメータ(スプリット、サイクル長及びオフセット等)を設定する交通感応制御を行う。
また、中央装置4の制御部401は、この制御部401が実行するコンピュータプログラムの機能部分として、車両通行判定部(車両通行判定装置)411と、流入規制制御部412とを備えている。この車両通行判定部411及び流入規制制御部412については後述する。
【0029】
中央装置4の通信部403は、通信回線を介してLAN側と接続された通信インタフェースであり、所定時間ごとに信号灯器1bの灯色切り替えタイミング等に関する信号制御指令S1と、VICSセンター10から取得した渋滞情報等を含むVICS情報S2とを各交通信号制御機1aに送信している。信号制御指令S1は、信号制御パラメータの演算周期(例えば、1.0〜2.5分)ごとに送信され、VICS情報S2は例えば5分ごとに送信される。
【0030】
また、中央装置4の通信部403は、プローブ車両5からのプローブ情報S3を有するアップリンク情報ULと、車両感知器3の感知情報S4とを、交通信号制御器1aや光ビーコン11等からほぼリアルタイム(例えば、0.1〜1.0秒周期)で受信している。
【0031】
中央装置4の記憶部404は、ハードディスクや半導体メモリ等から構成されており、後述する車両通行判定部411が行う判定プログラム、後述する流入規制制御部412が行う信号制御を含む交通感応制御を行う制御プログラム、この交通感応制御に用いる信号制御パラメータの演算プログラム、及び、車両5ごとに提供する推奨経路の選定プログラム等を記憶している。
また、中央装置4の記憶部404は、制御部401が生成した前記信号制御指令S1、VICS情報S2と、LAN側から取得したプローブ情報S3及び感知情報S4とを一時的に記憶する。
【0032】
中央装置4の表示部402は、自身が管理するエリアの道路地図と、この道路地図上のすべての交通信号機1や光ビーコン11等の位置が表示された表示画面により構成され、中央オペレータに渋滞や事故等の交通状況を報知するものである。
中央装置4の操作部405は、キーボードやマウス等の入力インタフェースよりなり、この操作部405によって中央オペレータが前記表示部402に対する表示切り替え操作等を行えるようになっている。
【0033】
〔交通信号機〕
次に、図2及び図4を参照して、交通信号機1の構成を説明する。図2に示すように、交通信号機1は、主道路RM1,RM2及び従道路RS1,RS2のそれぞれに設置された4つの信号灯器1bと、この信号灯器1bと通信回線8を介して接続された交通信号制御機1aとを備えている。
【0034】
交通信号制御機1aは、中央装置4から信号制御指令S1を受信し、この信号制御指令S1に基づいて、各信号灯器1bに含まれる青、黄、赤等の信号灯の点灯、消灯及び点滅を制御する。
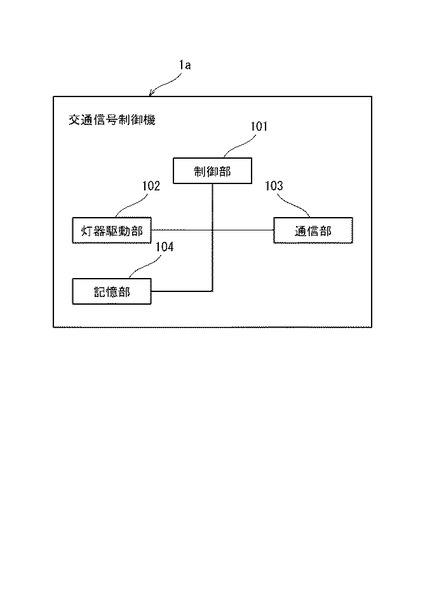
図4は、交通信号制御機1aの内部構成を示す機能ブロック図である。
図4に示すように、交通信号制御機1aは、制御部101、灯器駆動部102、通信部103及び記憶部104を含んでいる。
【0035】
交通信号制御機1aの制御部101は、1又は複数のマイクロコンピュータから構成されている。制御部101には、内部バスを介して灯器駆動部102、通信部103及び記憶部104が接続されており、制御部101はこれらのハードウェア各部の動作を制御する。
制御部101は、中央装置4が交通感応制御を行った結果の出力である信号制御指令S1に従って各信号灯器1bを駆動し、その指令S1に基づく所定のタイミングで各信号灯器1bの信号灯色を切り替える。
【0036】
灯器駆動部102は、半導体リレー(図示せず)を備え、上記制御部101から入力された出力指令S1に基づいて、複数の信号灯器1bの青色灯、黄色灯、赤色灯それぞれに対応して各色の信号灯に供給される交流電圧(AC100V)又は直流電圧をオン/オフする。
【0037】
交通信号制御機1aの通信部103は、中央装置4、車両感知器3及び光ビーコン11との間で有線通信を行う通信インタフェースである。この通信部103は、中央装置4の通信部403から信号制御指令S1及びVICS情報S2を受信し、信号制御指令S1については自装置の制御部101に送り、VICS情報S2についてはビーコン制御機11aに転送する。また、通信部103は、光ビーコン11からプローブ情報S3を受信するとともに、車両感知器3から感知情報S4を受信し、このプローブ情報S3及び感知情報S4については中央装置4に転送する。
【0038】
交通信号制御機1aの記憶部104は、ハードディスクや半導体メモリ等から構成されており、信号制御指令S1に基づいて信号灯色の切り替え制御を行うプログラムを記憶しているとともに、通信部103が受信した各種情報(信号制御指令S1やVICS情報S2等)を一時的に記憶する。
【0039】
〔車両通行判定装置〕
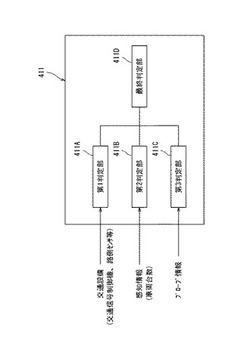
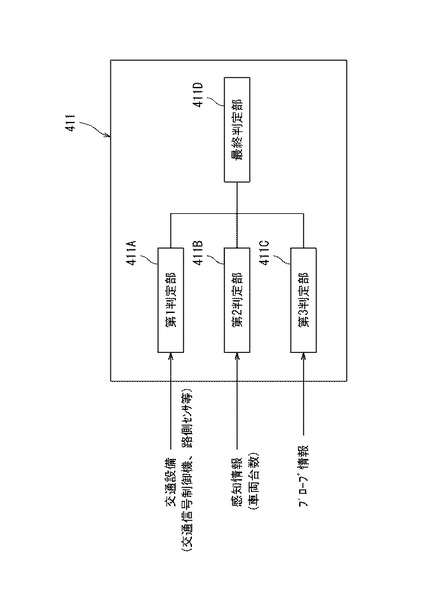
図5は、中央装置4の制御部401において車両通行判定装置を構成する車両通行判定部411の内部構成を示す機能ブロック図である。車両通行判定部411は、地震等の災害が発生した際に、所定の道路区間において車両の通行可否を判定するものであり、図5に示すように、第1判定部411A、第2判定部411B、第3判定部411C及び最終判定部411Dを備えている。
【0040】
第1判定部411Aは、所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する。ここで、「交通設備」とは、交通信号制御機1a、車両感知器3、光ビーコン11、情報中継装置(図示省略)及び道路表示板の制御装置(図示省略)など、中央装置4の通信部403との間で通信可能な設備を意味する。
【0041】
第1判定部411Aは、所定数以上の交通設備から異常発生情報(交通設備の一部が故障するなど当該交通設備に異常が発生していることを示す情報)を中央装置4の通信部403が受信(取得)した場合、又は所定数以上の交通設備と前記通信部403との間で通信することができない場合に、当該交通設備に異常が発生していると判定する。
例えば、図1において、交差点C3から交差点C12までの道路区間Lに設置された3つの車両感知器3のうち、2以上の車両感知器3から異常発生情報を中央装置4の通信部403が受信した場合、又は2以上の車両感知器3と前記通信部403との間で通信することができない場合、第1判定部411Aは前記道路区間Lにおいて2以上の車両感知器3に異常が発生していると判定する。
【0042】
なお、第1判定部411Aにおいて判定の閾値となる交通設備の所定数は、各道路区間毎に設置された交通設備の設置個数に応じて任意の値を設定することができる。その際、前記交通設備の所定数は、各道路区間における交通設備の全設置個数に対する所定の割合に応じた値を設定してもよい。
【0043】
第2判定部411Bは、所定の道路区間に設置された複数の車両感知器3のうちの所定数以上の車両感知器3の感知情報S4に異常が発生しているか否かを判定する。具体的には、第2判定部411Bは、中央装置4の通信部403において所定数以上の車両感知器3からそれぞれ受信した感知情報S4に含まれる車両台数がいずれも所定範囲(NMIN〜NMAX)内に含まれない場合、当該感知情報S4に異常が発生していると判定する。前記所定範囲の下限値であるNMINは、各道路区間において通常時に単位時間当たりに感知される車両台数よりも極端に少ない値(例えば、1)に設定される。また、前記所定範囲の上限値であるNMAXは、各道路区間において通常時に単位時間当たりに感知される車両台数よりも極端に多い値に設定される。
【0044】
例えば、図1において、前記道路区間Lに設置された3つの車両感知器3のうち、2以上の車両感知器3から中央装置4の通信部403が受信した各感知情報S4に含まれる車両台数がいずれも0台の場合、第2判定部411Bは前記道路区間Lにおいて2以上の車両感知器3の感知情報S4に異常が発生していると判定する。
なお、第2判定部411Bにおいて判定の閾値となる車両感知器3の所定数は、各道路区間毎に設置された車両感知器3の設置個数に応じて任意の値を設定することができる。その際、前記車両感知器3の所定数は、各道路区間における車両感知器3の全設置個数に対する所定の割合に応じた値を設定してもよい。
【0045】
第3判定部411Cは、所定の道路区間を走行するプローブ車両5から中央装置4の通信部403に送信されたプローブ情報S3が存在するか否かを判定する。
最終判定部411Dは、第1〜第3判定部411A〜411Cの判定結果に基づいて、所定の道路区間における車両の通行可否について最終判定する。具体的には、第1判定部411A及び第2判定部411Bの判定結果のうちのいずれか一方の判定結果が肯定的である場合であって、かつ第3判定部411Cの判定結果が否定的である場合に、その判定結果がなされた道路区間における車両の通行を不可と判定する。すなわち、第1判定部411Aにより所定の道路区間に設置された所定数以上の交通設備に異常が発生していると判定された場合、又は第2判定部411Bにより前記道路区間に設置された所定数以上の車両感知器3の感知情報S4に異常が発生していると判定された場合であって、かつ第3判定部411Cにより前記道路区間を走行するプローブ車両5から送信されたプローブ情報S3が存在しないと判定された場合、最終判定部411Dは前記道路区間における車両の通行を不可と判定する。
【0046】
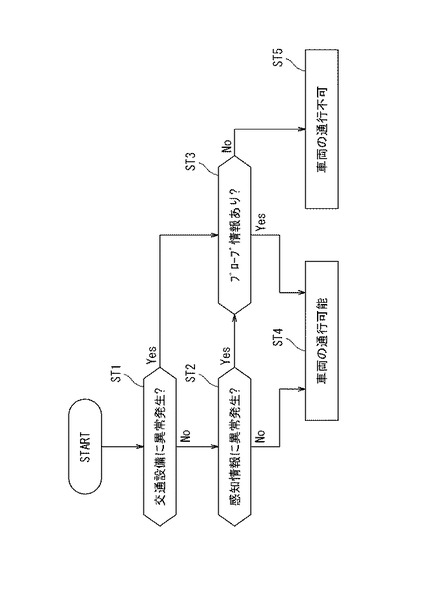
図6は、車両通行判定部411の判定処理手順を示すフローチャートである。以下、この図6を参照しつつ、前記判定処理手順について説明する。
まず、第1判定部411Aにおいて所定の道路区間に設置された車両感知器3や交通信号制御機1a等の複数の交通設備のうち所定数以上の交通設備に異常が発生しているか否かを判定する(ステップST1、第1判定ステップ)。そして、第1判定部411Aの判定結果が否定的である場合、すなわち所定数以上の交通設備に異常が発生していないと判定された場合、ステップST2(第2判定ステップ)による判定に移行する。
一方、第1判定部411Aの判定結果が肯定的である場合、すなわち所定数以上の交通設備に異常が発生していると判定された場合、ステップST3(第3判定ステップ)による判定に移行する。
【0047】
ステップST2では、第2判定部411Bにより前記道路区間に設置された複数の車両感知器3のうちの所定数以上の車両感知器3の感知情報S4に異常が発生しているか否かを判定する。そして、第2判定部411Bの判定結果が否定的である場合、すなわち所定数以上の車両感知器3の感知情報S4に異常が発生していないと判定された場合、車両通行判定部411は、最終判定部411Dにより前記道路区間において車両の通行は可能と判定する(ステップST4)。
一方、第2判定部411Bの判定結果が肯定的である場合、すなわち所定数以上の車両感知器3の感知情報S4に異常が発生していると判定された場合、ステップST3による判定に移行する。
【0048】
ステップST3では、第3判定部411Cにより前記道路区間走行するプローブ車両5から中央装置4の通信部403に送信されたプローブ情報S3が存在するか否かを判定する。そして、第3判定部411Cの判定結果が肯定的である場合、すなわちプローブ情報S3が存在すると判定された場合、最終判定部411Dにより前記道路区間において車両の通行は可能と判定する(ステップST4)。
一方、第3判定部411Cの判定結果が否定的である場合、すなわちプローブ情報S3が存在しないと判定された場合、最終判定部411Dにより前記道路区間において車両の通行は不可と判定する(ステップST5、最終判定ステップ)。
【0049】
〔流入規制制御部〕
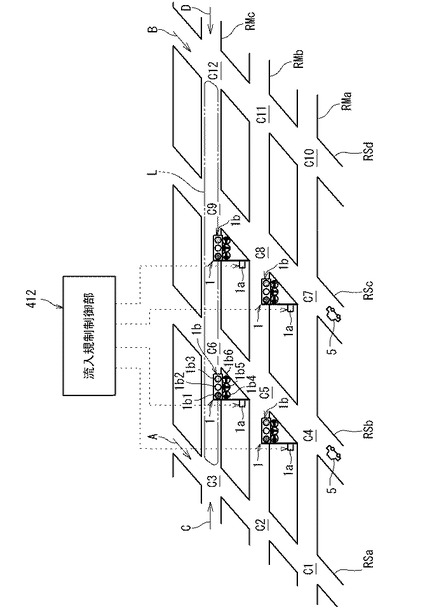
次に、図3及び図7を参照して、中央装置4の制御部401における流入規制制御部412について説明する。図3において、流入規制制御部412は、災害時に車両通行判定部411が車両の通行を不可と判定した道路区間への車両の流入を規制する信号制御を行う。
【0050】
図7は、流入規制制御部412により信号制御された場合の一例を示す図である。ここでは、車両の通行が不可と判定された道路区間(以下、通行不可区間ともいう)Lが交差点C3から交差点C12までの主道路RMaである場合に、その通行不可区間Lと交差点C6,C9において交差する従道路RSb,RScの上流側の交差点C4,C5,C7,C8について信号制御を行う場合を示している。
【0051】
図7において、各交差点Ciに設置された各交通信号機1の信号灯器1bには、青色灯1b1、黄色灯1b2、赤色灯1b3以外に、左折矢印灯器1b4、直進矢印灯器1b5、右折矢印灯器1b6が設けられている。流入規制制御部412は、各交差点C4,C5,C7,C8にそれぞれ設置された交通信号機1の直進矢印灯器1b4を常に消灯させておくとともに右折矢印灯器1b6及び左折矢印灯器1b4を点灯させることにより、車両を各交差点C4,C5,C7,C8で右折又は左折させるための信号制御指令S1を、各交差点C4,C5,C7,C8の交通信号制御機1aに送信する。これにより、従道路RSb,RScを走行する車両が、各交差点C4,C5,C7,C8を直進して通行不可区間Lの交差点C6,C9に流入するのを規制することができる。
【0052】
流入規制制御部412は、図示しないが、従道路RSa,RSd及び主道路RMa,RMb,RMcの各交差点についても、通行不可区間Lに車両が流入するのを規制する信号制御を行っている。
具体的には、流入規制制御部412は、従道路RSaにおいて交差点C2から交差点C3に向かって走行する車両を交差点C3で直進又は左折させるとともに、図7の上側から交差点C3に向かうように矢印A方向に走行する車両を交差点C3で直進又は右折させるための信号制御指令S1を交差点C3の交通信号制御機1aに送信している。
また、流入規制制御部412は、従道路RSdにおいて交差点C11から交差点C12に向かって走行する車両を交差点C12で直進又は右折させるとともに、図7の上側から交差点C12に向かうように矢印B方向に走行する車両を交差点C12で直進又は左折させるための信号制御指令S1を、交差点C12の交通信号制御機1aに送信している。
【0053】
また、流入規制制御部412は、主道路RMcにおいて図7の左側から交差点C3に向かうように矢印C方向に走行する車両、及び図7の右側から交差点C12に向かうように矢印D方向に走行する車両をそれぞれ各交差点C3,C12で右折又は左折させるための信号制御指令S1を、各交差点C3,C12の交通信号制御機1aに送信している。
また、流入規制制御部412は、主道路RMa,RMbにおいて、交差点C1,C2からそれぞれ交差点C4(C7),C5(C8)に向かって走行する車両を各交差点C4,C5,C7,C8で直進又は右折させるとともに、交差点C10,C11からそれぞれ交差点C7(C4),C8(C5)に向かって走行する車両を各交差点C4,C5,C7,C8で直進又は左折させるための信号制御指令S1を、各交差点C4,C5,C7,C8の交通信号制御機1aに送信している。
【0054】
流入規制制御部412は、通行不可区間Lへの車両の流入を規制する信号制御を行っているときに、その通行不可区間Lにおいて実際に車両の通行が可能である情報を取得した場合、前記信号制御を解除するようになっている。具体的には、例えば交通管制センターにおいて災害現場からの通報により通行不可区間Lにおいて車両の通行が可能になった情報を取得した場合、前記流入を規制する信号制御を行っている各交通信号制御機1aに、その信号制御を解除するための信号制御指令S1を送信する。このような信号制御の解除は、災害時に損壊した道路等が復旧することにより車両の通行が可能になった場合だけでなく、車両通行判定部411が車両の通行を不可と判定した道路区間において実際には車両の通行が可能であった場合にも行われる。
【0055】
以上、本発明の実施形態に係る車両通行判定装置及び車両通行判定方法によれば、第1判定部411Aにより所定の道路区間に設置された所定数以上の交通設備に異常が発生していると判定された場合、又は第2判定部411Bにより前記道路区間に設置された所定数以上の車両感知器3から得られる感知情報S4に異常が発生していると判定された場合であって、かつ第3判定部411Cにより前記道路区間を走行するプローブ車両5から送信されたプローブ情報S3が存在しないと判定された場合に、最終判定部411Dにより前記道路区間における車両の通行を不可と判定するようにしたので、災害時に車両の通行が困難になった道路区間を迅速に把握することができる。
【0056】
また、第1判定部411Aは、交通設備から異常発生情報を取得した場合、又は交通設備と通信することができない場合に、当該交通設備に異常が発生していると判定するため、所定数以上の交通設備に異常が発生しているか否かの判定を正確に行うことができる。
【0057】
また、第2判定部411Bは車両感知器3の感知情報S4に含まれる車両台数に基づいて感知情報S4に異常が発生しているか否かを判定するため、所定数以上の車両感知器3の感知情報S4に異常が発生しているか否かの判定を正確に行うことができる。
【0058】
また、本発明の実施形態に係る交通信号制御装置及び交通信号制御方法によれば、車両通行判定装置(車両通行判定部411)が所定の道路区間において車両の通行を不可と判定した場合、流入規制制御部412により前記道路区間への車両の流入を規制することができるため、その周辺道路を走行する車両の安全性を確保することができる。
【0059】
また、車両の流入が規制されている道路区間において実際に車両の通行が可能である情報を取得した場合、流入規制制御部412により車両の流入を規制する信号制御を解除することができる。これにより、車両の流入が規制さている道路区間において、実際に車両の通行が可能であるにも関わらず、前記信号制御が長期間に亘って継続されるのを抑制することができる。
【0060】
〔その他の変形例〕
上記実施形態は例示であって本発明の範囲を制限するものではない。本発明の範囲は特許請求の範囲によって示され、特許請求の範囲の構成と均等の範囲内のすべての変更が本発明に含まれる。
【0061】
例えば、上記実施形態における車両通行判定部411の第1判定部411Aは、所定数以上の交通設備から異常発生情報を取得した場合、又は所定数以上の交通設備と通信することができない場合に、交通設備に異常が発生していると判定しているが、いずれか一方のみの場合に交通設備に異常が発生していると判定してもよい。
【0062】
また、車両通行判定部411の第2判定部411Bは、感知情報S4に含まれる車両台数に基づいて感知情報S4に異常が発生していると判定しているが、感知情報S4に含まれる車両速度等の他の情報に基づいて感知情報S4に異常が発生していると判定してもよい。
さらに、上記実施形態における車両通行判定部411及び流入規制制御部412は中央装置4に設けられているが、交通信号制御機1aに設けられていてもよい。この場合、交通信号制御機1aは交通信号制御装置を構成し、中央装置4と同様の情報を収集することによって車両の通行可否判定、流入規制制御及びその制御の解除を行う。
【0063】
また、上記実施形態における流入規制制御部412は、現場からの通報によって通行不可区間Lにおいて実際に車両の通行が可能である情報を取得しているが、車両感知器3やその他の交通設備から中央装置4に送信される情報に基づいて、前記通行が可能になった情報を取得してもよい。例えば、通行不可区間Lにおいて中央装置4との間で通信することができなかった所定数以上の交通設備が復旧した場合に、中央装置4においてこれらの交通設備から情報を受信したことをもって、通行不可区間Lにおいて車両の通行が可能になった情報を取得したものとすることができる。この場合、車両の流入を規制する信号制御の解除を迅速に行うことができる。
【符号の説明】
【0064】
3 車両感知器
4 中央装置(交通信号制御装置)
5 プローブ車両
411 車両通行判定部(車両通行判定装置)
411A 第1判定部
411B 第2判定部
411C 第3判定部
411D 最終判定部
412 流入規制制御部
S3 プローブ情報
S4 感知情報
【技術分野】
【0001】
本発明は、車両通行判定装置、交通信号制御装置、コンピュータプログラム、車両通行判定方法、及び交通信号制御方法に関する。
【背景技術】
【0002】
交通信号機に対する信号制御方式を、信号制御パラメータ(スプリット、サイクル長及びオフセット等)の設定方式の視点で大別すると、時間帯に応じて信号制御パラメータを設定する定周期制御と、交通状況に応じて信号制御パラメータを設定する交通感応制御の2種類がある。
このうち、後者の交通感応制御は、端末の交通信号制御機ごとに行う端末感応制御と、路線系統制御或いは面制御される複数の交差点を対象に信号制御パラメータを変化させる中央感応制御に分類される。
【0003】
上記中央感応制御は、交通流の変動に対応した高度な系統制御や広域制御(面制御)を行えるため、交通量の時間変動が激しくかつ交通量が多い道路に適用される。
かかる中央感応制御では、車両感知器情報に基づいてその時の交通状態に最適な一つのプログラムを選択するプログラム選択制御や、車両感知器情報に基づいてオンラインで信号制御パラメータや信号表示の切り替えタイミングを決定するプログラム形成制御を行うことにより、交通処理効率の向上を目指している(非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0004】
【非特許文献1】「改訂 交通信号の手引き」 編集・発行 社団法人 交通工学研究会(16〜18頁、83〜87頁)
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、地震等の災害が発生したときに、ある道路区間において道路の損壊や道路に隣接する建物の損壊により、車両の通行が困難になる場合がある。このような場合に、通行が困難になった道路区間に車両が流入することは非常に危険である。また、その道路区間に車両が流入することによって渋滞が発生すると、緊急車両の通行が困難になり、人命救助や復旧活動に支障を来すことになる。
そこで、前記中央感応制御を行う交通管制センターにおいて、災害現場からの通報等により災害情報を入手することによって、通行が困難な道路区間に車両が流入するのを規制する交通規制制御(流入規制制御)を行うことができる。しかし、大規模災害時には、車両通行が困難な道路区間を特定するのに多大な時間を要することから、交通規制制御をより迅速に行うことができる方策が要望されている。
【0006】
本発明は、このような実情に鑑み、災害時に車両の通行が困難になった道路区間を迅速に把握することができるようにすることを目的とする。
【課題を解決するための手段】
【0007】
(1)本発明の車両通行判定装置は、所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する第1判定部と、前記道路区間に設置された複数の車両感知器のうちの所定数以上の車両感知器から得られる感知情報に異常が発生しているか否かを判定する第2判定部と、前記道路区間を走行するプローブ車両から送信されたプローブ情報が存在するか否かを判定する第3判定部と、前記第1判定部及び第2判定部の判定結果のうちのいずれか一方の判定結果が肯定的であって、かつ前記第3判定部の判定結果が否定的である場合に、前記道路区間における車両の通行を不可と判定する最終判定部とを備えていることを特徴とする。
【0008】
本発明の車両通行判定装置によれば、所定の道路区間に設置された所定数以上の交通設備に異常が発生していると判定された場合、又は前記道路区間に設置された所定数以上の車両感知器から得られる感知情報に異常が発生していると判定された場合であって、かつ前記道路区間を走行するプローブ車両から送信されたプローブ情報が存在しないと判定された場合に、前記道路区間における車両の通行を不可と判定するようにしたので、災害時に車両の通行が困難になった道路区間を迅速に把握することができる。
【0009】
(2)前記第1判定部は、前記所定数以上の交通設備から異常発生情報を取得した場合、又は前記所定数以上の交通設備と通信することができない場合に、当該交通設備に異常が発生していると判定することが好ましい。
この場合、所定数以上の交通設備に異常が発生しているか否かの判定を正確に行うことができる。
【0010】
(3)前記第2判定部は、前記感知情報に含まれる車両台数がいずれも所定範囲内に含まれない場合に、当該感知情報に異常が発生していると判定することが好ましい。
この場合、所定数以上の車両感知器から得られる感知情報に異常が発生しているか否かの判定を正確に行うことができる。
【0011】
(4)他の観点からみた本発明は、前記(1)に記載の車両通行判定装置が、前記道路区間における車両の通行を不可と判定した場合に、当該道路区間への車両の流入を規制する信号制御を行う流入規制制御部を備えていることを特徴とする交通信号制御装置である。
本発明の交通信号制御装置によれば、流入規制制御部により車両通行判定装置が車両の通行を不可と判定した道路区間への車両の流入を規制することができるため、その周辺道路を走行する車両の安全性を確保することができる。
【0012】
(5)前記流入規制制御部は、車両の流入が規制されている前記道路区間において実際に車両の通行が可能である情報を取得した場合に、前記信号制御を解除することが好ましい。
この場合、車両の流入が規制されている道路区間において、実際に車両の通行が可能であるにも関わらず、前記信号制御が長期間に亘って継続されるのを抑制することができる。
【0013】
(6)更に他の観点から見た本発明は、コンピュータを、前記(1)に記載の車両通行判定装置として機能させるためのコンピュータプログラムである。
【0014】
(7)更に他の観点から見た本発明は、コンピュータを、前記(4)に記載の交通信号制御装置として機能させるためのコンピュータプログラムである。
【0015】
(8)更に他の観点から見た本発明は、所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する第1判定ステップと、前記道路区間に設置された複数の車両感知器のうちの所定数以上の車両感知器から得られる感知情報に異常が発生しているか否かを判定する第2判定ステップと、前記道路区間を走行するプローブ車両から送信されたプローブ情報が存在するか否かを判定する第3判定ステップと、前記第1判定ステップ及び第2判定ステップの判定結果のうちのいずれか一方の判定結果が肯定的であって、かつ前記第3判定ステップの判定結果が肯定的である場合に、前記道路区間における車両の通行を不可と判定する最終判定ステップと、を含むことを特徴とする車両通行判定方法である。
【0016】
(9)更に他の観点から見た本発明は、前記(8)に記載の車両通行判定方法により、前記道路区間における車両の通行を不可と判定した場合に、当該道路区間への車両の流入を規制するように信号制御を行うことを特徴とする交通信号制御方法である。
【発明の効果】
【0017】
本発明によれば、災害時に車両の通行が困難になった道路区間を迅速に把握することができる。
【図面の簡単な説明】
【0018】
【図1】交通信号制御システムの概要を示す全体構成図である。
【図2】交通信号機の構成を示す道路平面図である。
【図3】中央装置の内部構成を示す機能ブロック図である。
【図4】交通信号制御機の内部構成を示す機能ブロック図である。
【図5】車両通行判定部の内部構成を示す機能ブロック図である。
【図6】車両通行判定部の判定処理手順を示すフローチャートである。
【図7】流入規制制御部により信号制御された場合の一例を示す図である。
【発明を実施するための形態】
【0019】
〔システムの全体構成〕
以下、本発明の実施の形態を図面に基づいて説明する。
図1は、本発明の車両通行判定装置及び交通信号制御装置を採用した交通信号制御システムの全体構成図である。また、図2は、同システムの交通信号機の構成を示す道路平面図である。
図1及び図2に示すように、本実施形態の交通信号制御システムは、交通信号機1、車載装置2、車両感知器3、中央装置4、車載装置2を搭載したプローブ車両5(以下、単に車両5という場合がある。)、VICS(Vehicle Information and Communication System:「VICS」は登録商標)センター10、光ビーコン11などを含む。
【0020】
図1及び図2において、符号S1〜S4で示される各種の信号又は情報のうち、S1は中央装置4が生成する、交通信号機1の信号灯色の切り替えタイミングを制御するための信号制御指令である。
また、S2はVICSセンター10が生成するVICS情報である。このVICS情報S2には、渋滞情報、リンク旅行時間、事故・故障車・工事情報、速度規制・車線規制情報、駐車場の位置、駐車場・サービスエリア・パーキングエリアの満車・空車情報などが含まれている。
【0021】
さらに、S3は、車載装置2を搭載した車両(プローブ車両)5が生成するプローブ情報であり、このプローブ情報S3は、走行中の車両5の所定時間又は距離ごとの位置、速度及び時刻等が含まれている。S4は車両感知器3の感知情報である。
【0022】
図1に示すように、交通信号制御システムにおいて、各交通信号機1は、複数の交差点Ci(i=1〜12)のそれぞれに設置され、電話回線等の通信回線6を介してルータ7に接続されている。
このルータ7は交通管制センター内の中央装置4に接続され、中央装置4は自装置が管轄する制御エリアに含まれる、各交差点Ciの交通信号制御機1aとLAN(Local Area Network)を構成している。
【0023】
従って、中央装置4は各交通信号制御機1aと双方向通信が可能であり、各交通信号機1は他の交通信号機1とも双方向通信が可能である。なお、中央装置4は、交通管制センターではなく道路上に設置してもよい。
また、図1では、図示を簡略化するために、各交差点Ciに信号灯器1bが1つだけ描写されているが、実際の交差点Ciには、例えば図2に示すように、互いに交差する道路の上り下り用として4つの信号灯器1bが設置されている。
【0024】
車両感知器3は、ループ式、超音波式、光学式、画像式等とすることができ、交差点Ciに流入する車両を感知する。図2において、車両感知器3は、対応する交差点Ciの上流側の道路に設置されており、感知ヘッド3aと感知器制御部3bとを有している。感知器制御部3bは、感知ヘッド3aの感知エリアを通過した車両の台数や当該車両の速度などを求めることができる。また、感知器制御部3bは、通信回線8を介して交通信号制御機1aと繋がっており、求められた車両台数及び車両速度等を含む情報(感知情報S4)は、交通信号制御機1aで中継され、通信回線6を介して中央装置4に送信される。
【0025】
図2に示すように、光ビーコン11は、道路脇の支柱に取り付けられたビーコン制御機11aと、その支柱の上端部から道路側に延びる梁材に取り付けられた1つ又は複数のビーコンヘッド(投受光器:以下、単に「ヘッド」という。)11bとを備えている。
ビーコン制御機11aは、通信回線8を通じて交通信号制御機1aと双方向通信が可能である。ヘッド11bは道路の車線数だけ設けられ、その車線の直上に配置されている。また、各ヘッド11bは発光素子と受光素子を内部に有する。
【0026】
これらの素子が発光又は受光することで通信可能となる道路上の範囲(通信領域)は、ヘッド11bの直下よりもやや上流に設定されている。車載装置2は、その通信領域を通過する間に、ヘッド11bとの間でアップリンクULとダウンリンクDLの送受信が可能である。
ビーコン制御機11aは、交通信号制御機1aを通じて受信したVICS情報S2を車載装置2に送信するダウンリンクDLに含めることができる。また、車載装置2が送信するアップリンクULには、プローブ情報S3が含まれており、このプローブ情報S3は交通信号制御機1aを介して中央装置4に転送される。
【0027】
〔中央装置〕
図3は、本発明の交通信号制御装置を構成する中央装置4の内部構成を示す機能ブロック図である。
図3に示すように、中央装置4は、制御部401、表示部402、通信部403、記憶部404及び操作部405を含んでいる。
中央装置4の制御部401は、ワークステーション(WS)やパーソナルコンピュータ(PC)等よりなり、交通信号機1や車両感知器3等からの各種の交通情報の収集・処理(演算)・記録、信号制御及び情報提供を統括的に行う。制御部401は、内部バスを介して上記ハードウェア各部と繋がっており、これら各部の動作も制御する。
【0028】
中央装置4の制御部401は、自身のネットワークに属する交差点Ciの交通信号機1に対して、同一道路上の交通信号機1群を調整する系統制御や、この系統制御を道路網に拡張した広域制御(面制御)を行うものであり、交通状況に応じて信号制御パラメータ(スプリット、サイクル長及びオフセット等)を設定する交通感応制御を行う。
また、中央装置4の制御部401は、この制御部401が実行するコンピュータプログラムの機能部分として、車両通行判定部(車両通行判定装置)411と、流入規制制御部412とを備えている。この車両通行判定部411及び流入規制制御部412については後述する。
【0029】
中央装置4の通信部403は、通信回線を介してLAN側と接続された通信インタフェースであり、所定時間ごとに信号灯器1bの灯色切り替えタイミング等に関する信号制御指令S1と、VICSセンター10から取得した渋滞情報等を含むVICS情報S2とを各交通信号制御機1aに送信している。信号制御指令S1は、信号制御パラメータの演算周期(例えば、1.0〜2.5分)ごとに送信され、VICS情報S2は例えば5分ごとに送信される。
【0030】
また、中央装置4の通信部403は、プローブ車両5からのプローブ情報S3を有するアップリンク情報ULと、車両感知器3の感知情報S4とを、交通信号制御器1aや光ビーコン11等からほぼリアルタイム(例えば、0.1〜1.0秒周期)で受信している。
【0031】
中央装置4の記憶部404は、ハードディスクや半導体メモリ等から構成されており、後述する車両通行判定部411が行う判定プログラム、後述する流入規制制御部412が行う信号制御を含む交通感応制御を行う制御プログラム、この交通感応制御に用いる信号制御パラメータの演算プログラム、及び、車両5ごとに提供する推奨経路の選定プログラム等を記憶している。
また、中央装置4の記憶部404は、制御部401が生成した前記信号制御指令S1、VICS情報S2と、LAN側から取得したプローブ情報S3及び感知情報S4とを一時的に記憶する。
【0032】
中央装置4の表示部402は、自身が管理するエリアの道路地図と、この道路地図上のすべての交通信号機1や光ビーコン11等の位置が表示された表示画面により構成され、中央オペレータに渋滞や事故等の交通状況を報知するものである。
中央装置4の操作部405は、キーボードやマウス等の入力インタフェースよりなり、この操作部405によって中央オペレータが前記表示部402に対する表示切り替え操作等を行えるようになっている。
【0033】
〔交通信号機〕
次に、図2及び図4を参照して、交通信号機1の構成を説明する。図2に示すように、交通信号機1は、主道路RM1,RM2及び従道路RS1,RS2のそれぞれに設置された4つの信号灯器1bと、この信号灯器1bと通信回線8を介して接続された交通信号制御機1aとを備えている。
【0034】
交通信号制御機1aは、中央装置4から信号制御指令S1を受信し、この信号制御指令S1に基づいて、各信号灯器1bに含まれる青、黄、赤等の信号灯の点灯、消灯及び点滅を制御する。
図4は、交通信号制御機1aの内部構成を示す機能ブロック図である。
図4に示すように、交通信号制御機1aは、制御部101、灯器駆動部102、通信部103及び記憶部104を含んでいる。
【0035】
交通信号制御機1aの制御部101は、1又は複数のマイクロコンピュータから構成されている。制御部101には、内部バスを介して灯器駆動部102、通信部103及び記憶部104が接続されており、制御部101はこれらのハードウェア各部の動作を制御する。
制御部101は、中央装置4が交通感応制御を行った結果の出力である信号制御指令S1に従って各信号灯器1bを駆動し、その指令S1に基づく所定のタイミングで各信号灯器1bの信号灯色を切り替える。
【0036】
灯器駆動部102は、半導体リレー(図示せず)を備え、上記制御部101から入力された出力指令S1に基づいて、複数の信号灯器1bの青色灯、黄色灯、赤色灯それぞれに対応して各色の信号灯に供給される交流電圧(AC100V)又は直流電圧をオン/オフする。
【0037】
交通信号制御機1aの通信部103は、中央装置4、車両感知器3及び光ビーコン11との間で有線通信を行う通信インタフェースである。この通信部103は、中央装置4の通信部403から信号制御指令S1及びVICS情報S2を受信し、信号制御指令S1については自装置の制御部101に送り、VICS情報S2についてはビーコン制御機11aに転送する。また、通信部103は、光ビーコン11からプローブ情報S3を受信するとともに、車両感知器3から感知情報S4を受信し、このプローブ情報S3及び感知情報S4については中央装置4に転送する。
【0038】
交通信号制御機1aの記憶部104は、ハードディスクや半導体メモリ等から構成されており、信号制御指令S1に基づいて信号灯色の切り替え制御を行うプログラムを記憶しているとともに、通信部103が受信した各種情報(信号制御指令S1やVICS情報S2等)を一時的に記憶する。
【0039】
〔車両通行判定装置〕
図5は、中央装置4の制御部401において車両通行判定装置を構成する車両通行判定部411の内部構成を示す機能ブロック図である。車両通行判定部411は、地震等の災害が発生した際に、所定の道路区間において車両の通行可否を判定するものであり、図5に示すように、第1判定部411A、第2判定部411B、第3判定部411C及び最終判定部411Dを備えている。
【0040】
第1判定部411Aは、所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する。ここで、「交通設備」とは、交通信号制御機1a、車両感知器3、光ビーコン11、情報中継装置(図示省略)及び道路表示板の制御装置(図示省略)など、中央装置4の通信部403との間で通信可能な設備を意味する。
【0041】
第1判定部411Aは、所定数以上の交通設備から異常発生情報(交通設備の一部が故障するなど当該交通設備に異常が発生していることを示す情報)を中央装置4の通信部403が受信(取得)した場合、又は所定数以上の交通設備と前記通信部403との間で通信することができない場合に、当該交通設備に異常が発生していると判定する。
例えば、図1において、交差点C3から交差点C12までの道路区間Lに設置された3つの車両感知器3のうち、2以上の車両感知器3から異常発生情報を中央装置4の通信部403が受信した場合、又は2以上の車両感知器3と前記通信部403との間で通信することができない場合、第1判定部411Aは前記道路区間Lにおいて2以上の車両感知器3に異常が発生していると判定する。
【0042】
なお、第1判定部411Aにおいて判定の閾値となる交通設備の所定数は、各道路区間毎に設置された交通設備の設置個数に応じて任意の値を設定することができる。その際、前記交通設備の所定数は、各道路区間における交通設備の全設置個数に対する所定の割合に応じた値を設定してもよい。
【0043】
第2判定部411Bは、所定の道路区間に設置された複数の車両感知器3のうちの所定数以上の車両感知器3の感知情報S4に異常が発生しているか否かを判定する。具体的には、第2判定部411Bは、中央装置4の通信部403において所定数以上の車両感知器3からそれぞれ受信した感知情報S4に含まれる車両台数がいずれも所定範囲(NMIN〜NMAX)内に含まれない場合、当該感知情報S4に異常が発生していると判定する。前記所定範囲の下限値であるNMINは、各道路区間において通常時に単位時間当たりに感知される車両台数よりも極端に少ない値(例えば、1)に設定される。また、前記所定範囲の上限値であるNMAXは、各道路区間において通常時に単位時間当たりに感知される車両台数よりも極端に多い値に設定される。
【0044】
例えば、図1において、前記道路区間Lに設置された3つの車両感知器3のうち、2以上の車両感知器3から中央装置4の通信部403が受信した各感知情報S4に含まれる車両台数がいずれも0台の場合、第2判定部411Bは前記道路区間Lにおいて2以上の車両感知器3の感知情報S4に異常が発生していると判定する。
なお、第2判定部411Bにおいて判定の閾値となる車両感知器3の所定数は、各道路区間毎に設置された車両感知器3の設置個数に応じて任意の値を設定することができる。その際、前記車両感知器3の所定数は、各道路区間における車両感知器3の全設置個数に対する所定の割合に応じた値を設定してもよい。
【0045】
第3判定部411Cは、所定の道路区間を走行するプローブ車両5から中央装置4の通信部403に送信されたプローブ情報S3が存在するか否かを判定する。
最終判定部411Dは、第1〜第3判定部411A〜411Cの判定結果に基づいて、所定の道路区間における車両の通行可否について最終判定する。具体的には、第1判定部411A及び第2判定部411Bの判定結果のうちのいずれか一方の判定結果が肯定的である場合であって、かつ第3判定部411Cの判定結果が否定的である場合に、その判定結果がなされた道路区間における車両の通行を不可と判定する。すなわち、第1判定部411Aにより所定の道路区間に設置された所定数以上の交通設備に異常が発生していると判定された場合、又は第2判定部411Bにより前記道路区間に設置された所定数以上の車両感知器3の感知情報S4に異常が発生していると判定された場合であって、かつ第3判定部411Cにより前記道路区間を走行するプローブ車両5から送信されたプローブ情報S3が存在しないと判定された場合、最終判定部411Dは前記道路区間における車両の通行を不可と判定する。
【0046】
図6は、車両通行判定部411の判定処理手順を示すフローチャートである。以下、この図6を参照しつつ、前記判定処理手順について説明する。
まず、第1判定部411Aにおいて所定の道路区間に設置された車両感知器3や交通信号制御機1a等の複数の交通設備のうち所定数以上の交通設備に異常が発生しているか否かを判定する(ステップST1、第1判定ステップ)。そして、第1判定部411Aの判定結果が否定的である場合、すなわち所定数以上の交通設備に異常が発生していないと判定された場合、ステップST2(第2判定ステップ)による判定に移行する。
一方、第1判定部411Aの判定結果が肯定的である場合、すなわち所定数以上の交通設備に異常が発生していると判定された場合、ステップST3(第3判定ステップ)による判定に移行する。
【0047】
ステップST2では、第2判定部411Bにより前記道路区間に設置された複数の車両感知器3のうちの所定数以上の車両感知器3の感知情報S4に異常が発生しているか否かを判定する。そして、第2判定部411Bの判定結果が否定的である場合、すなわち所定数以上の車両感知器3の感知情報S4に異常が発生していないと判定された場合、車両通行判定部411は、最終判定部411Dにより前記道路区間において車両の通行は可能と判定する(ステップST4)。
一方、第2判定部411Bの判定結果が肯定的である場合、すなわち所定数以上の車両感知器3の感知情報S4に異常が発生していると判定された場合、ステップST3による判定に移行する。
【0048】
ステップST3では、第3判定部411Cにより前記道路区間走行するプローブ車両5から中央装置4の通信部403に送信されたプローブ情報S3が存在するか否かを判定する。そして、第3判定部411Cの判定結果が肯定的である場合、すなわちプローブ情報S3が存在すると判定された場合、最終判定部411Dにより前記道路区間において車両の通行は可能と判定する(ステップST4)。
一方、第3判定部411Cの判定結果が否定的である場合、すなわちプローブ情報S3が存在しないと判定された場合、最終判定部411Dにより前記道路区間において車両の通行は不可と判定する(ステップST5、最終判定ステップ)。
【0049】
〔流入規制制御部〕
次に、図3及び図7を参照して、中央装置4の制御部401における流入規制制御部412について説明する。図3において、流入規制制御部412は、災害時に車両通行判定部411が車両の通行を不可と判定した道路区間への車両の流入を規制する信号制御を行う。
【0050】
図7は、流入規制制御部412により信号制御された場合の一例を示す図である。ここでは、車両の通行が不可と判定された道路区間(以下、通行不可区間ともいう)Lが交差点C3から交差点C12までの主道路RMaである場合に、その通行不可区間Lと交差点C6,C9において交差する従道路RSb,RScの上流側の交差点C4,C5,C7,C8について信号制御を行う場合を示している。
【0051】
図7において、各交差点Ciに設置された各交通信号機1の信号灯器1bには、青色灯1b1、黄色灯1b2、赤色灯1b3以外に、左折矢印灯器1b4、直進矢印灯器1b5、右折矢印灯器1b6が設けられている。流入規制制御部412は、各交差点C4,C5,C7,C8にそれぞれ設置された交通信号機1の直進矢印灯器1b4を常に消灯させておくとともに右折矢印灯器1b6及び左折矢印灯器1b4を点灯させることにより、車両を各交差点C4,C5,C7,C8で右折又は左折させるための信号制御指令S1を、各交差点C4,C5,C7,C8の交通信号制御機1aに送信する。これにより、従道路RSb,RScを走行する車両が、各交差点C4,C5,C7,C8を直進して通行不可区間Lの交差点C6,C9に流入するのを規制することができる。
【0052】
流入規制制御部412は、図示しないが、従道路RSa,RSd及び主道路RMa,RMb,RMcの各交差点についても、通行不可区間Lに車両が流入するのを規制する信号制御を行っている。
具体的には、流入規制制御部412は、従道路RSaにおいて交差点C2から交差点C3に向かって走行する車両を交差点C3で直進又は左折させるとともに、図7の上側から交差点C3に向かうように矢印A方向に走行する車両を交差点C3で直進又は右折させるための信号制御指令S1を交差点C3の交通信号制御機1aに送信している。
また、流入規制制御部412は、従道路RSdにおいて交差点C11から交差点C12に向かって走行する車両を交差点C12で直進又は右折させるとともに、図7の上側から交差点C12に向かうように矢印B方向に走行する車両を交差点C12で直進又は左折させるための信号制御指令S1を、交差点C12の交通信号制御機1aに送信している。
【0053】
また、流入規制制御部412は、主道路RMcにおいて図7の左側から交差点C3に向かうように矢印C方向に走行する車両、及び図7の右側から交差点C12に向かうように矢印D方向に走行する車両をそれぞれ各交差点C3,C12で右折又は左折させるための信号制御指令S1を、各交差点C3,C12の交通信号制御機1aに送信している。
また、流入規制制御部412は、主道路RMa,RMbにおいて、交差点C1,C2からそれぞれ交差点C4(C7),C5(C8)に向かって走行する車両を各交差点C4,C5,C7,C8で直進又は右折させるとともに、交差点C10,C11からそれぞれ交差点C7(C4),C8(C5)に向かって走行する車両を各交差点C4,C5,C7,C8で直進又は左折させるための信号制御指令S1を、各交差点C4,C5,C7,C8の交通信号制御機1aに送信している。
【0054】
流入規制制御部412は、通行不可区間Lへの車両の流入を規制する信号制御を行っているときに、その通行不可区間Lにおいて実際に車両の通行が可能である情報を取得した場合、前記信号制御を解除するようになっている。具体的には、例えば交通管制センターにおいて災害現場からの通報により通行不可区間Lにおいて車両の通行が可能になった情報を取得した場合、前記流入を規制する信号制御を行っている各交通信号制御機1aに、その信号制御を解除するための信号制御指令S1を送信する。このような信号制御の解除は、災害時に損壊した道路等が復旧することにより車両の通行が可能になった場合だけでなく、車両通行判定部411が車両の通行を不可と判定した道路区間において実際には車両の通行が可能であった場合にも行われる。
【0055】
以上、本発明の実施形態に係る車両通行判定装置及び車両通行判定方法によれば、第1判定部411Aにより所定の道路区間に設置された所定数以上の交通設備に異常が発生していると判定された場合、又は第2判定部411Bにより前記道路区間に設置された所定数以上の車両感知器3から得られる感知情報S4に異常が発生していると判定された場合であって、かつ第3判定部411Cにより前記道路区間を走行するプローブ車両5から送信されたプローブ情報S3が存在しないと判定された場合に、最終判定部411Dにより前記道路区間における車両の通行を不可と判定するようにしたので、災害時に車両の通行が困難になった道路区間を迅速に把握することができる。
【0056】
また、第1判定部411Aは、交通設備から異常発生情報を取得した場合、又は交通設備と通信することができない場合に、当該交通設備に異常が発生していると判定するため、所定数以上の交通設備に異常が発生しているか否かの判定を正確に行うことができる。
【0057】
また、第2判定部411Bは車両感知器3の感知情報S4に含まれる車両台数に基づいて感知情報S4に異常が発生しているか否かを判定するため、所定数以上の車両感知器3の感知情報S4に異常が発生しているか否かの判定を正確に行うことができる。
【0058】
また、本発明の実施形態に係る交通信号制御装置及び交通信号制御方法によれば、車両通行判定装置(車両通行判定部411)が所定の道路区間において車両の通行を不可と判定した場合、流入規制制御部412により前記道路区間への車両の流入を規制することができるため、その周辺道路を走行する車両の安全性を確保することができる。
【0059】
また、車両の流入が規制されている道路区間において実際に車両の通行が可能である情報を取得した場合、流入規制制御部412により車両の流入を規制する信号制御を解除することができる。これにより、車両の流入が規制さている道路区間において、実際に車両の通行が可能であるにも関わらず、前記信号制御が長期間に亘って継続されるのを抑制することができる。
【0060】
〔その他の変形例〕
上記実施形態は例示であって本発明の範囲を制限するものではない。本発明の範囲は特許請求の範囲によって示され、特許請求の範囲の構成と均等の範囲内のすべての変更が本発明に含まれる。
【0061】
例えば、上記実施形態における車両通行判定部411の第1判定部411Aは、所定数以上の交通設備から異常発生情報を取得した場合、又は所定数以上の交通設備と通信することができない場合に、交通設備に異常が発生していると判定しているが、いずれか一方のみの場合に交通設備に異常が発生していると判定してもよい。
【0062】
また、車両通行判定部411の第2判定部411Bは、感知情報S4に含まれる車両台数に基づいて感知情報S4に異常が発生していると判定しているが、感知情報S4に含まれる車両速度等の他の情報に基づいて感知情報S4に異常が発生していると判定してもよい。
さらに、上記実施形態における車両通行判定部411及び流入規制制御部412は中央装置4に設けられているが、交通信号制御機1aに設けられていてもよい。この場合、交通信号制御機1aは交通信号制御装置を構成し、中央装置4と同様の情報を収集することによって車両の通行可否判定、流入規制制御及びその制御の解除を行う。
【0063】
また、上記実施形態における流入規制制御部412は、現場からの通報によって通行不可区間Lにおいて実際に車両の通行が可能である情報を取得しているが、車両感知器3やその他の交通設備から中央装置4に送信される情報に基づいて、前記通行が可能になった情報を取得してもよい。例えば、通行不可区間Lにおいて中央装置4との間で通信することができなかった所定数以上の交通設備が復旧した場合に、中央装置4においてこれらの交通設備から情報を受信したことをもって、通行不可区間Lにおいて車両の通行が可能になった情報を取得したものとすることができる。この場合、車両の流入を規制する信号制御の解除を迅速に行うことができる。
【符号の説明】
【0064】
3 車両感知器
4 中央装置(交通信号制御装置)
5 プローブ車両
411 車両通行判定部(車両通行判定装置)
411A 第1判定部
411B 第2判定部
411C 第3判定部
411D 最終判定部
412 流入規制制御部
S3 プローブ情報
S4 感知情報
【特許請求の範囲】
【請求項1】
所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する第1判定部と、
前記道路区間に設置された複数の車両感知器のうちの所定数以上の車両感知器から得られる感知情報に異常が発生しているか否かを判定する第2判定部と、
前記道路区間を走行するプローブ車両から送信されたプローブ情報が存在するか否かを判定する第3判定部と、
前記第1判定部及び第2判定部の判定結果のうちのいずれか一方の判定結果が肯定的であって、かつ前記第3判定部の判定結果が否定的である場合に、前記道路区間における車両の通行を不可と判定する最終判定部とを備えていることを特徴とする車両通行判定装置。
【請求項2】
前記第1判定部は、前記所定数以上の交通設備から異常発生情報を取得した場合、又は前記所定数以上の交通設備と通信することができない場合に、当該交通設備に異常が発生していると判定する請求項1に記載の車両通行判定装置。
【請求項3】
前記第2判定部は、前記感知情報に含まれる車両台数が所定範囲内に含まれない場合に、当該感知情報に異常が発生していると判定する請求項1又は2に記載の車両通行判定装置。
【請求項4】
請求項1に記載の車両通行判定装置が、前記道路区間における車両の通行を不可と判定した場合に、当該道路区間への車両の流入を規制する信号制御を行う流入規制制御部を備えていることを特徴とする交通信号制御装置。
【請求項5】
前記流入規制制御部は、車両の流入が規制されている前記道路区間において実際に車両の通行が可能である情報を取得した場合に、前記信号制御を解除する請求項4に記載の交通信号制御装置。
【請求項6】
コンピュータを、請求項1に記載の車両通行判定装置として機能させるためのコンピュータプログラム。
【請求項7】
コンピュータを、請求項4に記載の交通信号制御装置として機能させるためのコンピュータプログラム。
。
【請求項8】
所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する第1判定ステップと、
前記道路区間に設置された複数の車両感知器のうちの所定数以上の車両感知器から得られる感知情報に異常が発生しているか否かを判定する第2判定ステップと、
前記道路区間を走行するプローブ車両から送信されたプローブ情報が存在するか否かを判定する第3判定ステップと、
前記第1判定ステップ及び第2判定ステップの判定結果のうちのいずれか一方の判定結果が肯定的であって、かつ前記第3判定ステップの判定結果が肯定的である場合に、前記道路区間における車両の通行を不可と判定する最終判定ステップと、を含むことを特徴する車両通行判定方法。
【請求項9】
請求項8に記載の車両通行判定方法により、前記道路区間における車両の通行を不可と判定した場合に、当該道路区間への車両の流入を規制するように信号制御を行うことを特徴する交通信号制御方法。
【請求項1】
所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する第1判定部と、
前記道路区間に設置された複数の車両感知器のうちの所定数以上の車両感知器から得られる感知情報に異常が発生しているか否かを判定する第2判定部と、
前記道路区間を走行するプローブ車両から送信されたプローブ情報が存在するか否かを判定する第3判定部と、
前記第1判定部及び第2判定部の判定結果のうちのいずれか一方の判定結果が肯定的であって、かつ前記第3判定部の判定結果が否定的である場合に、前記道路区間における車両の通行を不可と判定する最終判定部とを備えていることを特徴とする車両通行判定装置。
【請求項2】
前記第1判定部は、前記所定数以上の交通設備から異常発生情報を取得した場合、又は前記所定数以上の交通設備と通信することができない場合に、当該交通設備に異常が発生していると判定する請求項1に記載の車両通行判定装置。
【請求項3】
前記第2判定部は、前記感知情報に含まれる車両台数が所定範囲内に含まれない場合に、当該感知情報に異常が発生していると判定する請求項1又は2に記載の車両通行判定装置。
【請求項4】
請求項1に記載の車両通行判定装置が、前記道路区間における車両の通行を不可と判定した場合に、当該道路区間への車両の流入を規制する信号制御を行う流入規制制御部を備えていることを特徴とする交通信号制御装置。
【請求項5】
前記流入規制制御部は、車両の流入が規制されている前記道路区間において実際に車両の通行が可能である情報を取得した場合に、前記信号制御を解除する請求項4に記載の交通信号制御装置。
【請求項6】
コンピュータを、請求項1に記載の車両通行判定装置として機能させるためのコンピュータプログラム。
【請求項7】
コンピュータを、請求項4に記載の交通信号制御装置として機能させるためのコンピュータプログラム。
。
【請求項8】
所定の道路区間に設置された複数の交通設備のうちの所定数以上の交通設備に異常が発生しているか否かを判定する第1判定ステップと、
前記道路区間に設置された複数の車両感知器のうちの所定数以上の車両感知器から得られる感知情報に異常が発生しているか否かを判定する第2判定ステップと、
前記道路区間を走行するプローブ車両から送信されたプローブ情報が存在するか否かを判定する第3判定ステップと、
前記第1判定ステップ及び第2判定ステップの判定結果のうちのいずれか一方の判定結果が肯定的であって、かつ前記第3判定ステップの判定結果が肯定的である場合に、前記道路区間における車両の通行を不可と判定する最終判定ステップと、を含むことを特徴する車両通行判定方法。
【請求項9】
請求項8に記載の車両通行判定方法により、前記道路区間における車両の通行を不可と判定した場合に、当該道路区間への車両の流入を規制するように信号制御を行うことを特徴する交通信号制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−97550(P2013−97550A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239331(P2011−239331)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
[ Back to top ]