
車両速度計測方法及びそれを利用した車両全体像検出方法並びに車両ナンバープレート情報誤認防止方法
【課題】車両ナンバープレートを認識した車両の速度を精密に計測するする方法を提供する。
【課題を解決するための手段】道路1を撮影するカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、その後、第二の画像データを第二の時点において取得するステップと、前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、前記第一の時点と前記第二の時点の時間差を算定するステップと、前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度Vを計算するステップから車両の走行速度Vを計測する。
【課題を解決するための手段】道路1を撮影するカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、その後、第二の画像データを第二の時点において取得するステップと、前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、前記第一の時点と前記第二の時点の時間差を算定するステップと、前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度Vを計算するステップから車両の走行速度Vを計測する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は道路上に設置された車両ナンバー読み取り装置を用いて、車両速度を計測する方法及びそれにより検出された車両速度を利用して、走行車両の全体像の把握や走行車両のナンバープレート情報の誤認防止を行う方法に関する。
【背景技術】
【0002】
車両ナンバー読取装置は車両ナンバーを読み取ることにより、例えば交通量計測システム、高速道路料金収受システムや駐車場などにおける入出場管理システム等に利用されている。
【0003】
このような車両ナンバー読取装置は道路上や所定箇所に設置された車両ナンバープレートを撮像するITVカメラにより撮像された画像情報に基づいて、その車両ナンバープレートから車両を特定するようになっている。(例えば、特許文献1、特許文献2参照)
【0004】
また、このナンバープレートから車両を特定する他に、車両速度を計測把握することは交通流の把握等の点からも重要である。
【0005】
この車両速度を計測する方法は、例えば特開平7−282387号公報(特許文献3)で提案されている。この方法は、道路を含む領域の映像信号を得て、適切に設定された複数の計測点での輝度レベルのデータ群を順次得て、交通流の速度の高低に応じて交通流の速度が高速度である時に対応して計測対象区間に存在する全車両について一定時間に移動する夫々の距離より個々の車両の速度を求めて各車両の速度を累積平均して空間平均速度を求め、交通流の速度が低速度である時に対応しては一定の2計測ライン間の距離を車両が移動するに要する時間より個々の車両の速度を求め各車両の速度を累積平均して空間平均速度を求める車両速度計測方法である。
【0006】
したがって、間接的に車両速度を計測しているので、誤差が多く、車両速度計測の精度が十分でない。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平10−105873号公報
【特許文献2】特開2009−140160号公報
【特許文献3】特開平07−282387号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、上述の車両速度計測方法の問題に鑑み、道路上を走行する車両速度計測の精度をより高める方法を提供することを第1の課題とする。
【0009】
また、別のカメラで車両全体画像を撮影しようとしても、別のカメラ上での車両位置が特定できないため、完全に車両全体が画像内に収まって取得しがたいことを解決する方法を提供することを第2の課題とする。
【0010】
さらに、渋滞時等に前の車両にナンバープレートが一部隠れたりすることによる誤読データが1台の車両に対して複数発生しナンバープレート情報を誤認する場合があるので、これを防止する方法を提供することを第3の課題とする。
【課題を解決するための手段】
【0011】
前記第1の課題を解決するための第一の発明は、道路を撮影するカメラによって同一車両のナンバープレートを2フレーム検出し、その画面上の移動距離及びナンバープレート検出処理で算定した画面上のナンバープレート横幅から算出する実座標系との寸法比及び時間差、すなわち幾何学的な実座標と画像座標の換算を使って車両速度の計測を行う。
【0012】
すなわち、道路を撮影するカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、その後、第二の画像データを第二の時点において取得するステップと、前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、前記第一の時点と前記第二の時点の時間差を算定するステップと、前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップからなることを特徴としている。
【0013】
また、前記第2の課題を解決するための第二の発明は、車両を認識した第二のカメラで撮影した画面上、計測した車両速度から撮影に最適なナンバープレートの位置に車両が到達しているフレーム番号を計算し、当該番号のフレームを車両全体画像として取得する。
【0014】
すなわち、道路を撮影する第一のカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、その後、第二の撮影カメラによって第二の画像データを第二の時点において取得するステップと、前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、前記第一の時点と前記第二の時点の時間差を算定するステップと、前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップと、前記走行速度に基づき前記第一のカメラと隣接配置され、画像座標系の中心座標が一致する第二のカメラの視野下端に前記車両が到達するまでの所要時間を計算するステップと、前記所要時間に基づき、前記第二のカメラによって撮影された複数の画像データ中から、前記車両の全体像を含む画像データを選択するステップとからなることを特徴としている。
【0015】
さらに、前記第3の課題を解決するための第三の発明は、第一の発明を利用し、1回目に認識した車両ナンバー読取結果を保持し、2回目の車両ナンバー読取結果と完全に一致しなくても、計測した車両速度が一定値以下であれば、2回目の車両ナンバー情報を破棄する。
【0016】
すなわち、道路を撮影するカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、その後、第二の画像データを第二の時点において取得するステップと、前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、前記第一の時点と前記第二の時点の時間差を算定するステップと、前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップと、
第一の画像データ中に含まれる第一の車両番号情報と第二の画像データに含まれる第二の車両ナンバー情報とを比較し、一致文字数が設定値以上か未満かを判定するステップと、前記文字数が前記設定値未満の場合に、前記走行速度が制限速度未満であれば、第二の車両ナンバー情報を破棄するステップとからなることをも特徴としている。
【発明の効果】
【0017】
第一の発明によると、ナンバー検出処理で計測した画面上のナンバープレー
ト横幅から算出する実座標系との寸法比を動的に決定することで車両速度計測
の精度を向上させることができる。
【0018】
また、第二の発明によると、車両を認識したカメラと隣接し、画像座標系の中心座標を予め一致させた別カメラで撮影した画面上、計測した車両速度から撮影に最適なナンバープレートの位置に車両が到達しているフレーム番号を検出し、当該番号のフレームを車両全体画像として取得することで、車両全体が確実に撮影されている別カメラ画像を得ることができる。
【0019】
また、第三の発明によると、1回目に認識した車両ナンバー読取結果を保持し、2回目の車両ナンバー読取結果と完全に一致しなくても、計測した車両速度が一定値以下であれば、2回目の車両ナンバー情報を破棄することで、渋滞時の車両が前方車両の陰になるなど、車両ナンバーが一部見えない状態で誤認し、一台の車両に対し、複数の誤認データが発生することを防止できる。
【図面の簡単な説明】
【0020】
【図1】走行車両と車両認識装置との関係を実座標系で示す図である。
【図2】画像座標系における車両認識データの例である。
【発明を実施するための形態】
【0021】
本願第一から第三の発明ついて以下図面を用いて説明する。
(1)第1の発明の実施形態
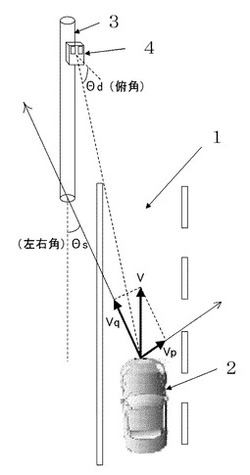
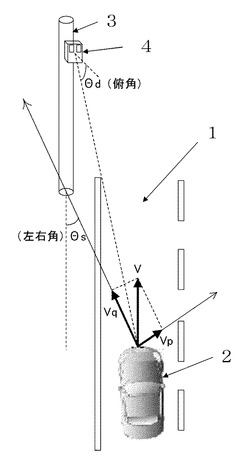
図1は道路上の車両ナンバー読取装置と道路を走行する車両の位置関係を実
座標系で表した図である。
【0022】
ここで、
1は道路
2は道路を走行する車両A
3は車両ナンバー読取装置が配置された支柱(電柱)
4は車両ナンバー読取装置
qは車両ナンバー読取位置と車両ナンバー読取装置の路面座標を結ぶ軸
pはq軸に垂直な路面上の軸
Vは道路を走行する車の車両速度
Vqは車両速度のq軸成分
Vpは車両速度のp軸成分
θdは俯角
θsは左右角
である。
【0023】
まず、第一の発明の道路1上を走行する車両2の車両速度Vを計測する方法について説明する。
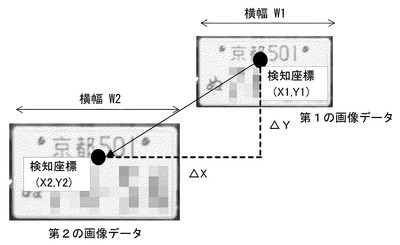
図2は車両ナンバー読取装置4のカメラによって得られた車両Aの車両ナンバーの画像を表す図である。第一の時点で得られた第一の画像データと第二の時点で得られた第二の画像データを示している。
画像データには画像座標系で検知座標(X1,Y1)、(X2,Y2)、ナンバープレート横幅W1、W2、ナンバープレート縦長H1、H2及び大板プレート、中板プレートの判定が含まれる。
なお、上記それぞれのX,Y、W、Hの数字1、2はそれぞれ第一の時点で得られた第一の画像データ及び第二の時点で得られた第二の画像データを示している。
【0024】
これらのデータと前述した図1に示した走行する車両2とその車両ナンバープレートとの位置関係の実座標から得られる俯角θd、左右角θsを使用して幾何学的に車両速度を計測する。
【0025】
さらに、この車両速度計測方法について詳述する。
図2に示すように、車両ナンバー読取装置4のカメラによって同一車両のナンバープレートを検出させ、その画像上の移動距離と時間差(フレーム差×33msec)を使い、車両速度Vを計測する。最初第1回目データを車両ナンバー読取装置4のカメラによって撮像する。
ここで、F1、F2はそれぞれ1、2回目に検知した画像の1コマのフレームID(ただし、実座標上のP軸、Q軸方向の移動距離Lp、LqはそれぞれLp=ΔXα、Lq=Δβ/sinθdである。)とする。さらに、α、βは実座標系との実寸法比であり、この実寸法比はナンバープレート検出処理で計測される、画面上のナンバープレート横幅(w画素)とナンバープレート縦長(h画素)ナンバープレートの種類(大板、中板)判定結果を用いて次式で計算される。
[画像座標系と実座標系の実寸比]
中板判定時の計算式:α=330/w
大板判定時の計算式:α=440/w
中板判定時の計算式:β=165/h
大板判定時の計算式:β=220/h
【0026】
なお、車両が移動するとθd、θsは変化するが、本実施例では無視することにする。
【0027】
以上のようなデータを用いて、所定の車両速度Vは次の(1)式にて求まる。
【0028】
【数1】

【0029】
(2)第2の発明の実施形態
本発明の実施形態では前記した車両ナンバー読取装置4に車両速度Vを算出するカメラと隣接されて装着されている別のカメラの2台を利用する。
前記第1の実施形態で使用した車両ナンバープレートを検知したカメラとは別のカメラのフレームIDを記録する。次に、第1の実施形態で算出した車両速度Vから、当該車両が別カメラの視野下端に到達するまでの所用時間tを算出する。次に、視野下端到達所要フレーム数=所要時間t/33msecを計算する。
そして、車両ナンバープレートを検知したカメラとは別のカメラのフレームIDに視野下端所要フレーム数を加えたフレームIDの画像を取得する。
このようにすると、車両全体画像を撮影することができる。
【0030】
(3)第3の発明の実施形態
本発明の実施形態では、車両が渋滞した時の車両ナンバープレート認識の誤読を防止するための前記第1の発明を利用する方法である。
まず、一番最新(今回)の車両ナンバー認識結果の一連番号と一つ前(前回)の車両ナンバー認識結果の一連ナンバーを比較する。
次に、それぞれの車両ナンバーの一致文字数が設定値以上か未満かを判定する。
次に一致文字数が設定値未満の場合には、第1の発明で算出した車両速度Vが設定速度以上か未満かを判定する。
そして、これが設定速度未満の場合は前記一番最新の車輌ナンバー認識結果を破棄する。
【0031】
これにより、車両ナンバープレートの認識を誤読することを防止することができる。
【産業上の利用可能性】
【0032】
正確な車両速度や車両全体像の把握及び車両ナンバーの誤認防止を通じて、
より正確な交通量の把握等車両管制等に利用できる。
【符号の説明】
【0033】
1 道路
2 道路を走行する車両
3 車両ナンバー読取装置が配置された支柱(電柱)
4 車両ナンバー読取装置
q 車両ナンバー読取位置と車両ナンバー読取装置の路面座標を結ぶ軸
p q軸に垂直な路面上の軸
V 道路を走行する車の車両速度
Vq 車両速度のq軸成分
Vp 車両速度のp軸成分
θd 俯角
θs 左右角
【技術分野】
【0001】
本発明は道路上に設置された車両ナンバー読み取り装置を用いて、車両速度を計測する方法及びそれにより検出された車両速度を利用して、走行車両の全体像の把握や走行車両のナンバープレート情報の誤認防止を行う方法に関する。
【背景技術】
【0002】
車両ナンバー読取装置は車両ナンバーを読み取ることにより、例えば交通量計測システム、高速道路料金収受システムや駐車場などにおける入出場管理システム等に利用されている。
【0003】
このような車両ナンバー読取装置は道路上や所定箇所に設置された車両ナンバープレートを撮像するITVカメラにより撮像された画像情報に基づいて、その車両ナンバープレートから車両を特定するようになっている。(例えば、特許文献1、特許文献2参照)
【0004】
また、このナンバープレートから車両を特定する他に、車両速度を計測把握することは交通流の把握等の点からも重要である。
【0005】
この車両速度を計測する方法は、例えば特開平7−282387号公報(特許文献3)で提案されている。この方法は、道路を含む領域の映像信号を得て、適切に設定された複数の計測点での輝度レベルのデータ群を順次得て、交通流の速度の高低に応じて交通流の速度が高速度である時に対応して計測対象区間に存在する全車両について一定時間に移動する夫々の距離より個々の車両の速度を求めて各車両の速度を累積平均して空間平均速度を求め、交通流の速度が低速度である時に対応しては一定の2計測ライン間の距離を車両が移動するに要する時間より個々の車両の速度を求め各車両の速度を累積平均して空間平均速度を求める車両速度計測方法である。
【0006】
したがって、間接的に車両速度を計測しているので、誤差が多く、車両速度計測の精度が十分でない。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平10−105873号公報
【特許文献2】特開2009−140160号公報
【特許文献3】特開平07−282387号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、上述の車両速度計測方法の問題に鑑み、道路上を走行する車両速度計測の精度をより高める方法を提供することを第1の課題とする。
【0009】
また、別のカメラで車両全体画像を撮影しようとしても、別のカメラ上での車両位置が特定できないため、完全に車両全体が画像内に収まって取得しがたいことを解決する方法を提供することを第2の課題とする。
【0010】
さらに、渋滞時等に前の車両にナンバープレートが一部隠れたりすることによる誤読データが1台の車両に対して複数発生しナンバープレート情報を誤認する場合があるので、これを防止する方法を提供することを第3の課題とする。
【課題を解決するための手段】
【0011】
前記第1の課題を解決するための第一の発明は、道路を撮影するカメラによって同一車両のナンバープレートを2フレーム検出し、その画面上の移動距離及びナンバープレート検出処理で算定した画面上のナンバープレート横幅から算出する実座標系との寸法比及び時間差、すなわち幾何学的な実座標と画像座標の換算を使って車両速度の計測を行う。
【0012】
すなわち、道路を撮影するカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、その後、第二の画像データを第二の時点において取得するステップと、前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、前記第一の時点と前記第二の時点の時間差を算定するステップと、前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップからなることを特徴としている。
【0013】
また、前記第2の課題を解決するための第二の発明は、車両を認識した第二のカメラで撮影した画面上、計測した車両速度から撮影に最適なナンバープレートの位置に車両が到達しているフレーム番号を計算し、当該番号のフレームを車両全体画像として取得する。
【0014】
すなわち、道路を撮影する第一のカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、その後、第二の撮影カメラによって第二の画像データを第二の時点において取得するステップと、前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、前記第一の時点と前記第二の時点の時間差を算定するステップと、前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップと、前記走行速度に基づき前記第一のカメラと隣接配置され、画像座標系の中心座標が一致する第二のカメラの視野下端に前記車両が到達するまでの所要時間を計算するステップと、前記所要時間に基づき、前記第二のカメラによって撮影された複数の画像データ中から、前記車両の全体像を含む画像データを選択するステップとからなることを特徴としている。
【0015】
さらに、前記第3の課題を解決するための第三の発明は、第一の発明を利用し、1回目に認識した車両ナンバー読取結果を保持し、2回目の車両ナンバー読取結果と完全に一致しなくても、計測した車両速度が一定値以下であれば、2回目の車両ナンバー情報を破棄する。
【0016】
すなわち、道路を撮影するカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、その後、第二の画像データを第二の時点において取得するステップと、前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、前記第一の時点と前記第二の時点の時間差を算定するステップと、前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップと、
第一の画像データ中に含まれる第一の車両番号情報と第二の画像データに含まれる第二の車両ナンバー情報とを比較し、一致文字数が設定値以上か未満かを判定するステップと、前記文字数が前記設定値未満の場合に、前記走行速度が制限速度未満であれば、第二の車両ナンバー情報を破棄するステップとからなることをも特徴としている。
【発明の効果】
【0017】
第一の発明によると、ナンバー検出処理で計測した画面上のナンバープレー
ト横幅から算出する実座標系との寸法比を動的に決定することで車両速度計測
の精度を向上させることができる。
【0018】
また、第二の発明によると、車両を認識したカメラと隣接し、画像座標系の中心座標を予め一致させた別カメラで撮影した画面上、計測した車両速度から撮影に最適なナンバープレートの位置に車両が到達しているフレーム番号を検出し、当該番号のフレームを車両全体画像として取得することで、車両全体が確実に撮影されている別カメラ画像を得ることができる。
【0019】
また、第三の発明によると、1回目に認識した車両ナンバー読取結果を保持し、2回目の車両ナンバー読取結果と完全に一致しなくても、計測した車両速度が一定値以下であれば、2回目の車両ナンバー情報を破棄することで、渋滞時の車両が前方車両の陰になるなど、車両ナンバーが一部見えない状態で誤認し、一台の車両に対し、複数の誤認データが発生することを防止できる。
【図面の簡単な説明】
【0020】
【図1】走行車両と車両認識装置との関係を実座標系で示す図である。
【図2】画像座標系における車両認識データの例である。
【発明を実施するための形態】
【0021】
本願第一から第三の発明ついて以下図面を用いて説明する。
(1)第1の発明の実施形態
図1は道路上の車両ナンバー読取装置と道路を走行する車両の位置関係を実
座標系で表した図である。
【0022】
ここで、
1は道路
2は道路を走行する車両A
3は車両ナンバー読取装置が配置された支柱(電柱)
4は車両ナンバー読取装置
qは車両ナンバー読取位置と車両ナンバー読取装置の路面座標を結ぶ軸
pはq軸に垂直な路面上の軸
Vは道路を走行する車の車両速度
Vqは車両速度のq軸成分
Vpは車両速度のp軸成分
θdは俯角
θsは左右角
である。
【0023】
まず、第一の発明の道路1上を走行する車両2の車両速度Vを計測する方法について説明する。
図2は車両ナンバー読取装置4のカメラによって得られた車両Aの車両ナンバーの画像を表す図である。第一の時点で得られた第一の画像データと第二の時点で得られた第二の画像データを示している。
画像データには画像座標系で検知座標(X1,Y1)、(X2,Y2)、ナンバープレート横幅W1、W2、ナンバープレート縦長H1、H2及び大板プレート、中板プレートの判定が含まれる。
なお、上記それぞれのX,Y、W、Hの数字1、2はそれぞれ第一の時点で得られた第一の画像データ及び第二の時点で得られた第二の画像データを示している。
【0024】
これらのデータと前述した図1に示した走行する車両2とその車両ナンバープレートとの位置関係の実座標から得られる俯角θd、左右角θsを使用して幾何学的に車両速度を計測する。
【0025】
さらに、この車両速度計測方法について詳述する。
図2に示すように、車両ナンバー読取装置4のカメラによって同一車両のナンバープレートを検出させ、その画像上の移動距離と時間差(フレーム差×33msec)を使い、車両速度Vを計測する。最初第1回目データを車両ナンバー読取装置4のカメラによって撮像する。
ここで、F1、F2はそれぞれ1、2回目に検知した画像の1コマのフレームID(ただし、実座標上のP軸、Q軸方向の移動距離Lp、LqはそれぞれLp=ΔXα、Lq=Δβ/sinθdである。)とする。さらに、α、βは実座標系との実寸法比であり、この実寸法比はナンバープレート検出処理で計測される、画面上のナンバープレート横幅(w画素)とナンバープレート縦長(h画素)ナンバープレートの種類(大板、中板)判定結果を用いて次式で計算される。
[画像座標系と実座標系の実寸比]
中板判定時の計算式:α=330/w
大板判定時の計算式:α=440/w
中板判定時の計算式:β=165/h
大板判定時の計算式:β=220/h
【0026】
なお、車両が移動するとθd、θsは変化するが、本実施例では無視することにする。
【0027】
以上のようなデータを用いて、所定の車両速度Vは次の(1)式にて求まる。
【0028】
【数1】
【0029】
(2)第2の発明の実施形態
本発明の実施形態では前記した車両ナンバー読取装置4に車両速度Vを算出するカメラと隣接されて装着されている別のカメラの2台を利用する。
前記第1の実施形態で使用した車両ナンバープレートを検知したカメラとは別のカメラのフレームIDを記録する。次に、第1の実施形態で算出した車両速度Vから、当該車両が別カメラの視野下端に到達するまでの所用時間tを算出する。次に、視野下端到達所要フレーム数=所要時間t/33msecを計算する。
そして、車両ナンバープレートを検知したカメラとは別のカメラのフレームIDに視野下端所要フレーム数を加えたフレームIDの画像を取得する。
このようにすると、車両全体画像を撮影することができる。
【0030】
(3)第3の発明の実施形態
本発明の実施形態では、車両が渋滞した時の車両ナンバープレート認識の誤読を防止するための前記第1の発明を利用する方法である。
まず、一番最新(今回)の車両ナンバー認識結果の一連番号と一つ前(前回)の車両ナンバー認識結果の一連ナンバーを比較する。
次に、それぞれの車両ナンバーの一致文字数が設定値以上か未満かを判定する。
次に一致文字数が設定値未満の場合には、第1の発明で算出した車両速度Vが設定速度以上か未満かを判定する。
そして、これが設定速度未満の場合は前記一番最新の車輌ナンバー認識結果を破棄する。
【0031】
これにより、車両ナンバープレートの認識を誤読することを防止することができる。
【産業上の利用可能性】
【0032】
正確な車両速度や車両全体像の把握及び車両ナンバーの誤認防止を通じて、
より正確な交通量の把握等車両管制等に利用できる。
【符号の説明】
【0033】
1 道路
2 道路を走行する車両
3 車両ナンバー読取装置が配置された支柱(電柱)
4 車両ナンバー読取装置
q 車両ナンバー読取位置と車両ナンバー読取装置の路面座標を結ぶ軸
p q軸に垂直な路面上の軸
V 道路を走行する車の車両速度
Vq 車両速度のq軸成分
Vp 車両速度のp軸成分
θd 俯角
θs 左右角
【特許請求の範囲】
【請求項1】
車両ナンバー読取装置を用いた道路上を走行する車両の走行速度計測方法であって、
道路を撮影するカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、
その後、第二の画像データを第二の時点において取得するステップと、
前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、
前記第一の時点と前記第二の時点の時間差を算定するステップと、
前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップからなる、
車両ナンバー読取装置を用いた道路上を走行するする車両の走行速度計測方法。
【請求項2】
車両ナンバー読取装置を用いて、道路上を走行する車両の全体像を撮像する方法であって、
道路を撮影する第一のカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、
その後、第二の画像データを第二の時点において取得するステップと、
前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、
前記第一の時点と前記第二の時点の時間差を算定するステップと、
前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップと、
前記走行速度に基づき、前記第一のカメラと隣接配置され、画像座標系の中心座標が一致する第二のカメラの視野下端に前記車両が到達するまでの所要時間を計算するステップと、前記所要時間に基づき、前記第二のカメラによって撮影された複数の画像データ中から、前記車両の全体像を含む画像データを選択するステップとからなる、車両ナンバー読取装置を用いた道路上を走行するする車両の全体像を撮影する方法。
【請求項3】
車両ナンバー読取装置を用いて、道路上を走行するする車両のナンバープレート情報を読取る際の前記ナンバープレート情報の誤認防止方法であって、
道路を撮影するカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、
その後、第二の画像データを第二の時点において取得するステップと、
前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、
前記第一の時点と前記第二の時点の時間差を算定するステップと、
前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップと、
第一の画像データ中に含まれる第一の車両番号情報と第二の画像データに含まれる第二の車両ナンバー情報とを比較し、一致文字数が設定値以上か未満かを判定するステップと、
前記文字数が前記設定値未満の場合に、前記走行速度が制限速度未満であれば、第二の車両ナンバー情報を破棄するステップ
からなる道路上を走行する車両のナンバープレート情報を読取る際の前記ナンバープレート情報の誤認防止方法。
【請求項1】
車両ナンバー読取装置を用いた道路上を走行する車両の走行速度計測方法であって、
道路を撮影するカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、
その後、第二の画像データを第二の時点において取得するステップと、
前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、
前記第一の時点と前記第二の時点の時間差を算定するステップと、
前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップからなる、
車両ナンバー読取装置を用いた道路上を走行するする車両の走行速度計測方法。
【請求項2】
車両ナンバー読取装置を用いて、道路上を走行する車両の全体像を撮像する方法であって、
道路を撮影する第一のカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、
その後、第二の画像データを第二の時点において取得するステップと、
前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、
前記第一の時点と前記第二の時点の時間差を算定するステップと、
前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップと、
前記走行速度に基づき、前記第一のカメラと隣接配置され、画像座標系の中心座標が一致する第二のカメラの視野下端に前記車両が到達するまでの所要時間を計算するステップと、前記所要時間に基づき、前記第二のカメラによって撮影された複数の画像データ中から、前記車両の全体像を含む画像データを選択するステップとからなる、車両ナンバー読取装置を用いた道路上を走行するする車両の全体像を撮影する方法。
【請求項3】
車両ナンバー読取装置を用いて、道路上を走行するする車両のナンバープレート情報を読取る際の前記ナンバープレート情報の誤認防止方法であって、
道路を撮影するカメラによって同一の車両を含む、第一の画像データを第一の時点において取得するステップと、
その後、第二の画像データを第二の時点において取得するステップと、
前記第一と第二のそれぞれの画像データ中に含まれる第一と第二の画像上ナンバープレート横幅を算定するステップと、
前記第一の時点と前記第二の時点の時間差を算定するステップと、
前記第一と第二のそれぞれの画像上ナンバープレート横幅と前記時間差に基づいて前記車両の走行速度を計算するステップと、
第一の画像データ中に含まれる第一の車両番号情報と第二の画像データに含まれる第二の車両ナンバー情報とを比較し、一致文字数が設定値以上か未満かを判定するステップと、
前記文字数が前記設定値未満の場合に、前記走行速度が制限速度未満であれば、第二の車両ナンバー情報を破棄するステップ
からなる道路上を走行する車両のナンバープレート情報を読取る際の前記ナンバープレート情報の誤認防止方法。
【図1】

【図2】
【図2】
【公開番号】特開2012−203795(P2012−203795A)
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2011−69708(P2011−69708)
【出願日】平成23年3月28日(2011.3.28)
【出願人】(000003942)日新電機株式会社 (328)
【Fターム(参考)】
【公開日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成23年3月28日(2011.3.28)
【出願人】(000003942)日新電機株式会社 (328)
【Fターム(参考)】
[ Back to top ]