
車両運動制御装置
【課題】より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定する。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させる。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定する。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させる。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の運動制御を複数の制御対象の協調により行う車両運動制御装置に関するものである。
【背景技術】
【0002】
従来、特許文献1において、車両のオーバステア(以下、OSという)状態またはアンダーステア(以下、USという)状態の進行に応じて、まず前後輪間の駆動力配分の変更を実行したのち、その状態が進行したら操舵角の補正を実行し、それでも更にその状態が進行したら選択された車輪の選択的制動を実行するという車両が開示されている。
【0003】
また、特許文献2において、USの度合いに応じて、その度合いが大きくなるに従って電動パワーステアリング装置(以下、EPSという)による反力抑制制御、報知装置による報知、制動力配分制御の順に作動させる車両用US制御装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4297150号公報
【特許文献2】特許第4455379号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された車両では、OS状態もしくはUS状態を解消するための制御要求値を実現する際に、使用する制御装置および作動順序を決めているだけである。また、特許文献2に記載された車両用US制御装置では、USを抑制するための制御要求値を実現するために、不足している制御量を段階的に補うように複数の制御対象を順番に作動させているだけである。すなわち、特許文献1、2では、車両の横方向運動制御を複数の制御対象の協調によって実行することについて開示されているものの、各制御装置の制御可能範囲(アベイラビリティ)に基づいて、どの制御対象を優先的に作動させるのがより最適な制御を行えるかなどについて考慮されていない。例えば、アベイラビリティの一つである制御量の大きさが制御対象によって異なっている場合に、その制御量の大きさだけを基準として制御対象を決定したのでは、緊急時などの制御応答性が要求される場面で応答性良い制御出力を発生させることができない。したがって、複数の制御対象を用いてより最適な車両運動制御が実行されるようにすることが望まれる。
【0006】
なお、ここでは、車両の横方向運動について述べたが、車両の前後方向運動やピッチング方向運動等についても、同様のことが言える。
【0007】
本発明は上記点に鑑みて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、請求項1に記載の発明では、複数の制御対象(12〜19)によって同じ方向の車両運動制御を行うことで、要求制御量を実現する車両運動制御装置において、複数の制御対象(12〜19)の中から車両運動制御を行うために使用する制御対象の優先順位を優先順位決定条件に基づいて決定することで制御対象を選択する制御対象選択手段(61、72)を有し、制御対象選択手段(61、72)は、優先順位決定条件の変化を検出し、該優先順位決定条件の変化を検出したことを選択タイミングとして、制御対象の選択を再度行わせる制御対象選択タイミング判定部(61d)を備えていることを特徴としている。
【0009】
このように、優先順位決定条件に基づいて、制御対象の選択タイミングを判定している。すなわち、最初に制御対象が選択されたのち、制御対象を選択するときの優先順位決定条件が変化したときに、それに基づいて選択制御対象を再考させるようにしている。これにより、より最適な制御対象を選択して車両運動制御を円滑に行うことが可能となる。
【0010】
例えば、請求項2に記載したように、制御対象選択手段(61、72)は、優先順位決定条件として、複数の制御対象(12〜19)それぞれの最大制御量および制御量の変化量を含む制御可能範囲に相当するアベイラビリティ、車両状態を示す車両情報、車両運動制御を実行するアプリケーションからの要求の少なくとも1つを用いることができる。
【0011】
請求項3に記載したように、優先順位決定条件としてアベイラビリティを含まれる場合、制御対象選択タイミング判定部(61d)では、単位時間当たりのアベイラビリティの変化量が閾値を超えたときを選択タイミングとすることができる。
【0012】
このように、アベイラビリティの変化に伴って制御対象を再考させるようにすることもでき、アベイラビリティの変化に対応した最適な制御対象が改めて選択されるようにできる。アベイラビリティの変化としては、例えば車両運動制御を行うためのアクチュエータ(16〜19)の機能の変化などが挙げられる。例えば、フロントステアのフェールによりフロントステアのアベイラビリティが急変したときには、それに伴って制御対象が改めて選択され、フェールしていないリアステアによって車両横方向運動制御を行われるようにすることができる。このように、アベイラビリティの変化に伴って制御対象を再考させるようにすることもできる。
【0013】
また、請求項4に記載したように、優先順位決定条件としてアベイラビリティが含まれる場合、制御対象選択タイミング判定部(61d)は、アベイラビリティの変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択タイミングとすることができる。
【0014】
このように、アベイラビリティの変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択対象切替予測タイミングとして選択制御対象を再考させることにより、アベイラビリティに基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0015】
また、請求項5に記載したように、優先順位決定条件として車両情報が含まれる場合、制御対象選択タイミング判定部(61d)では、車両情報に表される車両状態が変化したときを選択タイミングとすることができる。
【0016】
このように、車両情報に表される車両状態が変化したとき、例えば下り坂で車両が減速した場合を選択タイミングとし、このタイミングで選択制御対象を再考させることにより、車両情報に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0017】
また、請求項6に記載したように、優先順位決定条件として車両情報が含まれる場合、制御対象選択タイミング判定部(61d)は、車両情報に表される車両状態の変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択タイミングとすることができる。
【0018】
このように、車両情報に表される車両状態の変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択対象切替予測タイミングとして選択制御対象を再考させることにより、車両情報に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0019】
例えば、請求項7に記載したように、車両情報に表される車両状態として走行路面状態が変化したとき、選択する制御対象の切り替えを行うべき状況であると予測することができる。
【0020】
請求項8に記載したように、優先順位決定条件としてアプリケーションからの要求が含れる場合、制御対象選択タイミング判定部(61d)では、アプリケーションからの要求として少なくとも快適性重視の車両運動制御を行うコンフォートモードか安全性重視の車両運動制御を行うセーフティモードかの要求モードを取得し、該要求モードが変化したときを選択タイミングとすることができる。
【0021】
このように、アプリ要求モードとして快適性重視のコンフォートモードと応答性重視のセーフティモードが有る場合、その要求モードが変化したときを選択タイミングとし、このタイミングで選択制御対象を再考させることで、アプリ要求に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0022】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0023】
【図1】本発明の第1実施形態にかかる車両横方向運動制御システムのブロック図である。
【図2】アベイラビリティ物理量変換部20とアベイラビリティ演算部5の詳細構造を示したブロック図である。
【図3】制御対象選択部61の詳細構造を示したブロック図である。
【図4】アプリ要求モードがコンフォートの場合において、アプリ要求ヨーレートをすべての制御対象で実現できる場合と、一部の制御対象でしか実現できない場合の選択パターンを示した図である。
【図5】アプリ要求モードがセーフティの場合において、アプリ要求変化量をすべての制御対象で実現できる場合と、一部の制御対象でしか実現できない場合の選択パターンを示した図である。
【図6】アプリ要求値と第1〜第3制御対象の選択順の一例を示した図であり、(a)は、アプリ要求モードがコンフォートの場合の図、(b)は、アプリ要求モードがセーフティの場合の図である。
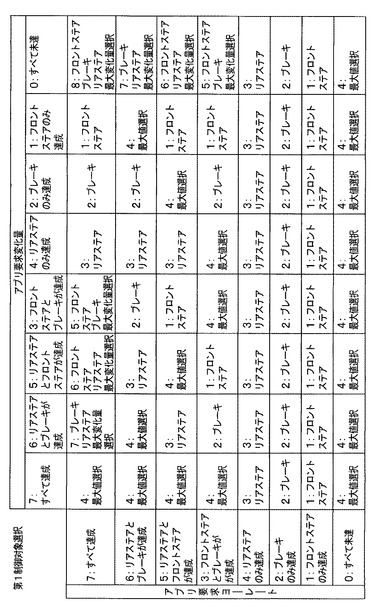
【図7(a)】アプリ要求モードがコンフォートである場合の第1制御対象選択用のマップである。
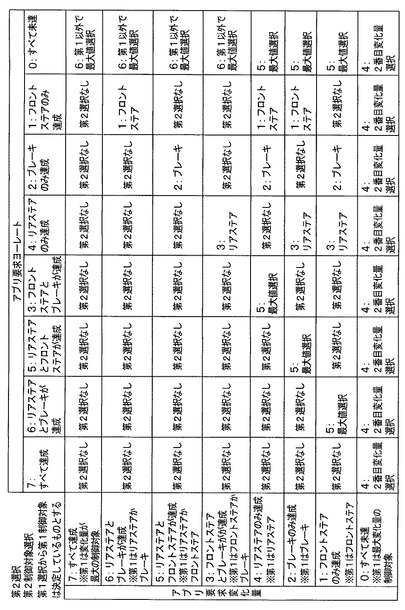
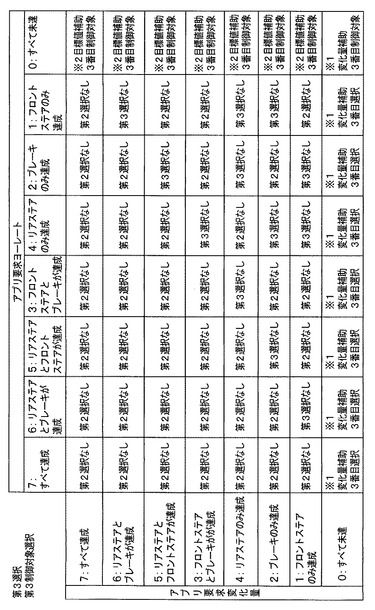
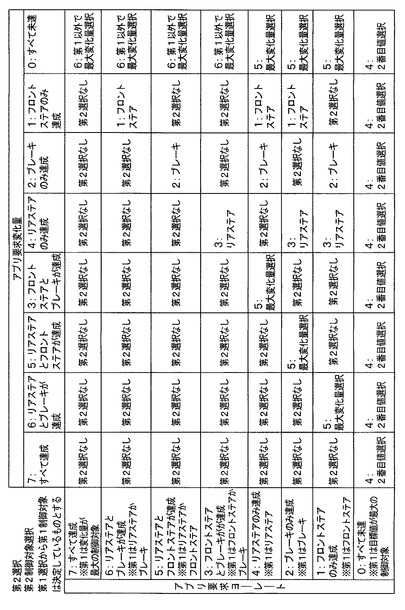
【図7(b)】アプリ要求モードがコンフォートである場合の第2制御対象選択用のマップである。
【図7(c)】アプリ要求モードがコンフォートである場合の第3制御対象選択用のマップである。
【図8(a)】アプリ要求モードがセーフティである場合の第1制御対象選択用のマップである。
【図8(b)】アプリ要求モードがセーフティである場合の第2制御対象選択用のマップである。
【図8(c)】アプリ要求モードがセーフティである場合の第3制御対象選択用のマップである。
【図9】制御対象選択タイミング判定部61dの詳細構造を示したブロック図である。
【図10】アプリ要求モードがコンフォートからセーフティへ変更されたときの車両挙動とアベイラビリティの変化を表した模式図である。
【図11】レーンキープ制御中の選択制御対象がフロントステアである場合において車両が減速したときの車両挙動とアベイラビリティの変化を表した模式図である。
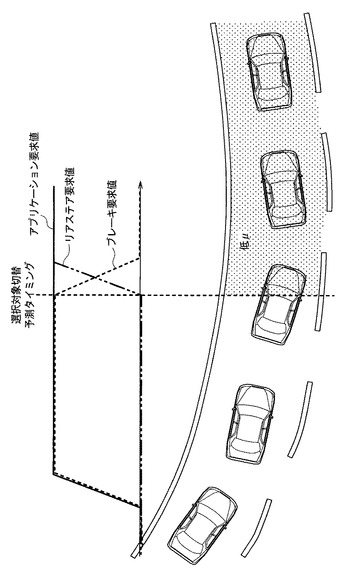
【図12】アプリケーションの要求に基づいてブレーキ制御によって車両横方向運動制御が実行されているときに、低μ路が検出された場合を示した模式図である。
【図13】フロントステアを制御するためのACT16、17がフェールにより駆動できなくなったときの車両挙動とアベイラビリティの変化を表した模式図である。
【図14】アプリケーションの要求に基づいてフロントステア制御によって車両横方向運動制御が実行されているときに、フロントステアのアベイラビリティが低下する場合を示した模式図である。
【発明を実施するための形態】
【0024】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0025】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、本発明の一実施形態にかかる車両横方向運動制御装置(以下、VLPという)が適用された車両横方向運動制御システムを例に挙げて、VLPについて説明する。
【0026】
図1は、本実施形態にかかる車両横方向運動制御システムのブロック図である。本実施形態の車両横方向運動制御システムでは、複数の制御対象、具体的にはフロントステア、リアステアおよびブレーキを制御することにより、車両横方向運動の制御を行う。
【0027】
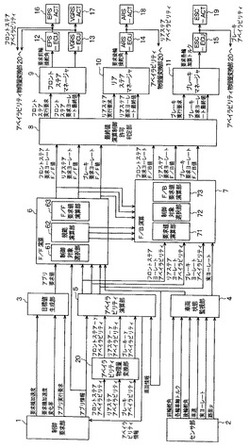
図1に示されるように、車両横方向運動制御システムは、制御要求部1、センサ部2、目標値生成部3、車両状態監視部4、アベイラビリティ演算部5、フィードフォワード(以下、F/Fという)演算部6、フィードバック(以下、F/Bという)演算部7、最終値演算制御許可判定部8、各種マネージャ9〜11、各種電子制御装置(以下、ECUという)12〜15および横方向運動制御用の各種アクチュエータ(以下、ACTという)16〜19を有している。これらのうちの目標値生成部3、車両状態監視部4、アベイラビリティ演算部5、F/F演算部6、F/B演算部7および最終値演算制御許可判定部8、もしくはこれらに各種マネージャ9〜11を含めたものがVLPに相当する。
【0028】
制御要求部1は、車両横方向運動制御を行う各アプリケーションの制御要求に従って、車両状態に応じた横方向運動に関する要求信号を出力する。本実施形態の場合、制御要求部1は、レーンキープ制御、レーンデパーチャ制御などの各種アプリケーションを実行する各種制御部(図示せず)を備えている。レーンキープ制御では、車両前方画像を取り込んで走行車線の両側の走行線を認識することにより、車両が走行線に沿って走行する際に、両側の走行線の中央付近からずれないように車両横方向運動制御を行う。レーンデパーチャ制御では、車両前方画像を取り込んで走行車線の両側の走行線を認識することにより、車両が走行車線に沿って走行する際に、両側の走行線からはみ出さないようにドライバに対して警報を行うものであるが、同時に両側の走行線からはみ出さないように車両横方向運動制御を行う。また、アプリケーションとしては、車両走行方向に存在する障害物などとの衝突を避けるように車両横方向運動制御を行う緊急回避制御や、駐車時に想定される車両移動経路に導くように車両横方向運動制御を行う駐車支援制御なども想定される。その他、車両横方向運動制御が行われるアプリケーションであれば、どのようなものであっても良い。
【0029】
これら各アプリケーションにおいて車両横方向制御の実行開始条件を満たすと判定されると、車両横方向制御として必要な制御量やアプリケーションの実行を指示する要求信号が出力され、これが車両横方向制御装置に入力される。これにより、車両横方向運動制御を実行するのに用いられる各種ACT16〜19が駆動されることで、各アプリケーションの要求に応じた車両の横方向運動が制御されるようになっている。本実施形態の場合、制御要求部1は、必要な制御量を示す要求信号として要求横加速度Gyおよび要求横加速度変化率dGy/dtを用いており、アプリケーションの実行の有無を指示する要求信号としてアプリ実行要求を用いている。
【0030】
また、制御要求部1では、各アプリケーションの内容に応じた要求モードや制御対象の優先度を表した情報であるアプリ情報をアベイラビリティ演算部5に伝えている。アプリケーションの内容に応じた要求モードは、セーフティ(安全性)、コンフォート(快適性)、エコ(経済性)のいずれを優先させるかを示しており、アプリケーションの内容に応じた制御を選択するための指標とされる。例えば、要求モードがセーフティの場合には応答性良い制御が実現され、コンフォートの場合には低い応答性で過度な負担を乗員にかけないような制御が実現され、エコの場合には最も必要エネルギーが少ない制御が実現されることで、アプリケーションの内容に応じた制御が実現されるようにする。また、制御対象の優先度は、アプリケーションに対応した車両横方向運動制御を行う際に選択されるべき制御対象の優先順位を示している。
【0031】
センサ部2は、各種車両状態を示す情報を車両状態監視部4に対して入力するものである。具体的には、センサ部2は、各種車両状態の検出信号もしくは各種車両状態の演算結果を示すデータ信号などを各種車両状態を示す情報として車両状態監視部4に入力している。本実施形態では、センサ部2から車両状態監視部4に対して、前輪舵角、各輪車軸トルク、後輪舵角、車速(車体速度)に関する情報が伝えられるようにしている。前輪舵角や後輪舵角に関しては、例えば舵角センサの検出信号が用いられる。各輪車軸トルクについては、例えばブレーキECUにおいて現在発生させられている各輪車軸トルクが演算されているためその演算結果が用いられる。車速に関しては、例えば車輪速度センサの検出信号に基づいて演算された各車輪の車輪速度から演算した値が用いられる。
【0032】
また、センサ部2には、車両に実際に発生している実ヨーレートを検出するヨーレートセンサも含まれている。このヨーレートセンサの検出信号もしくはその検出信号に基づいて演算した実ヨーレートが車両状態監視部4を介してF/B演算部7に伝えられている。さらに、センサ部2には、走行路面状態として路面摩擦係数(以下、μという)を検出する部分も含まれている。例えば、ブレーキECUでは車輪速度などに基づいて路面μを検出していることから、それの検出結果が車両状態監視部4に伝えられるようになっている。
【0033】
目標値生成部3は、制御要求部1から入力される要求横加速度Gyおよび要求横加速度変化率dGy/dtに基づいて、各アプリケーションの要求を調停する。そして、各アプリケーションの要求を満たすために必要な制御目標値であるアプリ要求値を出力する。アプリ要求値としては、アプリケーションの内容に応じて変わり、一制御周期内でのヨーレートγの絶対量(以下、ヨーレート絶対量という)やヨーレート変化量dγ/dtであるアプリ要求ヨーレートやアプリ要求変化量をアプリ要求値として出力している。各アプリケーションの要求の調停については、アプリ実行要求に示されるアプリケーションの種類に応じて行っている。例えば、各アプリケーションにて要求される要求横加速度Gyや要求横加速度変化率dGy/dtを加算した総和に対応するヨーレートγやヨーレート変化量dγ/dtをアプリ要求ヨーレートやアプリ要求変化量として出力するようにすれば、すべてのアプリケーションの要求を満たす車両横方向運動制御を行える。また、実装されているアプリケーションに優先順位がある場合には、優先順位が高いアプリケーションにて要求される要求横加速度Gyや要求横加速度変化率dGy/dtに対応するヨーレートγやヨーレート変化量dγ/dtをアプリ要求ヨーレートやアプリ要求変化量として出力する。アプリ実行要求にて、どのアプリケーションを実行するかが示されていることから、このアプリ実行要求に基づいて実行すべき優先順位の高いアプリケーションを選択することができる。
【0034】
なお、本実施形態では、制御要求部1から入力される要求値として要求横加速度Gyや要求横加速度変化率dGy/dtを用い、車両横方向運動制御を実行する際の制御量やその変化量として、アプリ要求ヨーレートやアプリ要求変化量というヨーレート換算した値を用いて説明するが、これらに限るものではない。例えば、制御要求部1から入力される要求値としてヨーレートγおよびヨーレート変化量dγ/dtを用い、車両横方向運動制御を実行する際の制御量として、それを横加速度換算した値を用いるようにしても良い。
【0035】
車両状態監視部4は、センサ部2から入力される各種車両状態を示す情報に基づいて、現在の車両情報を求め、その車両情報をアベイラビリティ演算部5に出力する。具体的には、車両状態監視部4では、車両に対して現在発生している前輪舵角、各輪車軸トルク、後輪舵角および車速に基づいて、一般的な数式より理論的に求められる現在あるべき前輪舵角、各輪車軸トルク、後輪舵角および車速を車両情報として求めている。また、走行路面状態を示す路面μなどの車両走行情報についても、車両情報として取得している。
【0036】
アベイラビリティ演算部5は、各種ACT16〜19を駆動するための各種ECU12〜15より各種ACT16〜19のアベイラビリティをアベイラビリティ物理量変換部20を介して受け取ることにより、各制御対象(フロントステア、リアステアおよびブレーキ)のアベイラビリティに関する情報(アベイラビリティ情報)を取得するアベイラビリティ取得手段を構成する。また、アベイラビリティ演算部5は、取得した各制御対象のアベイラビリティ情報と車両状態監視部4から伝えられる車両情報および制御要求部1から伝えられるアプリ情報に基づいて、VLPとしてのアベイラビリティを演算する。そして、VLPとしてのアベイラビリティに関する情報をF/F演算部6やF/B演算部7に対して伝えている。
【0037】
ここで、アベイラビリティとは、制御可能範囲のことを意味しており、出力できる制御量の最大値(最大制御量)に加えて、制御時の応答性を示す制御量の変化量も含む概念である。車両横方向運動制御においては、車両左旋回方向と右旋回方向の二つのアベイラビリティがある。
【0038】
例えば、各種ACT16〜19のアベイラビリティとは、各種ACT16〜19の最大制御量や、各種ACT16〜19の応答性(制御量の変化量)を意味している。また、各制御対象のアベイラビリティとは、各ACT16〜19のアベイラビリティにて示されるフロントステア、リアステアおよびブレーキそれぞれの最大制御量や応答性(制御量の変化量)を意味している。各種ACT16〜19のアベイラビリティについては、各種ECU12〜15よりそのときの各種ACT16〜19の状態を表したマップ等として、アベイラビリティ物理量変換部20を介してアベイラビリティ演算部5に伝えられる。ACT16〜19のアベイラビリティのうち、フロントステアを制御するためのACT16、17のアベイラビリティの合計がフロントステアのアベイラビリティ(フロントステアアベイラビリティ)となる。また、リアステアを制御するためのACT18のアベイラビリティがリアステアのアベイラビリティ(リアステアアベイラビリティ)となる。同様に、ブレーキを制御するためのACT19のアベイラビリティがブレーキのアベイラビリティ(ブレーキアベイラビリティ)となる。このため、各種ECU12〜15から各種ACT16〜19のアベイラビリティが伝えられることは、各制御対象のアベイラビリティが伝えられることを意味している。したがって、図1中では、各種ECU12〜15からフロントアベイラビリティ、リアアベイラビリティ、ブレーキアベイラビリティがアベイラビリティ物理量変換部20を介してアベイラビリティ演算部5に入力される形で示してある。
【0039】
また、VLPとしてのアベイラビリティとは、各制御対象のアベイラビリティやアプリ情報および車両情報を加味して出力し得る制御可能範囲のことを意味している。このアベイラビリティ演算部5によるVLPとしてのアベイラビリティの演算については、後で詳細に説明する。
【0040】
F/F演算部6は、アプリ要求ヨーレートやアベイラビリティ演算部5から伝えられるアベイラビリティ情報およびアプリ情報に基づいてF/F制御を行うためのF/F要求値を演算する。具体的には、本実施形態のF/F演算部6は、制御対象選択部61、規範演算部62およびF/F要求値演算部63を有した構成とされている。
【0041】
制御対象選択部61は、アプリ要求ヨーレートに加えて、アベイラビリティ演算部5を介して伝えられるアプリ情報やアベイラビリティ情報に基づいて、制御対象選択を行う制御対象選択手段を構成する。具体的には、制御対象選択部61では、各制御対象の中から車両横方向運動制御の実行に用いる制御対象を選択し、選択された制御対象(以下、選択制御対象という)に要求する制御量や応答性(制御量の変化量)の制御目標値を設定する制御対象選択を行う。制御対象選択は、車両横方向運動制御にかかわる制御要求が出されたとき、例えばレーンキープ制御などが実行されたタイミングなどに行われる。この制御対象選択部61の詳細構成や制御対象選択手法の詳細については、後で説明する。
【0042】
規範演算部62は、制御対象選択部61での選択制御対象が決まると、アベイラビリティ演算部5から伝えられたアベイラビリティ情報に基づいて、選択制御対象のアベイラビリティから選択制御対象の規範値を演算する。つまり、制御対象選択部61で選択制御対象が決まると、アプリ要求値を満たすのに必要な各選択制御対象それぞれの制御量や応答性の配分が決まる。例えば、後述する手法によって2つの制御対象が選択された場合、一番初めに選択された第1制御対象についてはアベイラビリティの最大制御量または制御量の最大変化量を発生させ、第2制御対象については第1制御対象で足りなかった制御量を発生させるなど、配分が決められる。このときに決まる制御量や変化量は各選択制御対象の制御目標値、つまりアプリ要求値を各選択制御対象に配分した値であり、実際に実現し得る規範値は異なっている。このため、この規範演算部62にて、予め求めておいた制御対象ごとの制御目標値と規範値との関係を示すデータなどから、制御目標値に対応する規範値を求めている。
【0043】
F/F要求値演算部63は、各選択制御対象の制御目標値と規範演算部62で演算された規範値との差に基づいて、選択制御対象に対するF/F要求値を演算する。F/F要求値の演算手法については、従来よりF/F制御演算手法として知られているどのような手法が用いられていても構わない。これにより、選択制御対象に対する要求ヨーレートF/F値が演算され、これが最終値演算制御許可判定部8およびF/B演算部7に出力される。後述するように、本実施形態では、フロントステア制御やリアステア制御およびブレーキの制御に基づいて、要求ヨーレートを実現する。これらフロントステア制御やリアステア制御およびブレーキの制御によって実現させるヨーレートγのF/F要求値が、それぞれフロントステア要求ヨーレートF/F値、リアステア要求ヨーレートF/F値およびブレーキ要求ヨーレートF/F値として表してある。
【0044】
F/B演算部7は、F/F演算部6にて演算された各選択制御対象の規範値やアベイラビリティ演算部5から伝えられるアベイラビリティ情報およびアプリ情報、さらには実ヨーレートに基づいてF/B制御を行うためのF/B値を演算する。具体的には、本実施形態のF/B演算部7は、要求値演算部71、制御対象選択部72、F/B要求値演算部73を有した構成とされている。
【0045】
要求値演算部71は、F/F演算部6の規範演算部62から取得した選択制御対象の規範値の総和とセンサ部2に備えられたヨーレートセンサで検出された実ヨーレートとの差に基づいて、トータルのF/B要求値を演算する。
【0046】
制御対象選択部72は、F/B要求値やアベイラビリティ演算部5を介して伝えられるアプリ情報やアベイラビリティ情報、さらにはF/F演算部6から伝えられる各F/F要求値(要求ヨーレートF/F値)に基づいて、制御対象選択を行う制御対象選択手段を構成する。具体的には、制御対象選択部72は、各制御対象の中からF/B制御の実行に用いる選択制御対象を選択し、選択制御対象に要求する制御量や応答性(制御量の変化量)の制御目標値を設定する制御対象選択を行う。この制御対象選択部72の機能は、基本的にはF/F演算部6に備えられた制御対象選択部61と同様である。この制御対象選択部72で選択される選択制御対象は、F/F演算部6の制御対象選択部61で選択される選択制御対象と同じであっても良いし、異なっていても良い。
【0047】
F/B要求値演算部73は、F/F演算部6の規範演算部62から取得した選択制御対象の規範値の総和とセンサ部2に備えられたヨーレートセンサで検出された実ヨーレートとの差に基づきF/B要求値を演算し、制御対象選択部72から算出した選択制御対象と制御対象余裕量に基づいて、F/B要求値を分配する。F/B要求値の演算手法については、従来よりF/B制御演算手法として知られているどのような手法が用いられていても構わない。これにより、選択制御対象に対する要求ヨーレートF/B値が演算され、これが最終値演算制御許可判定部8に出力される。ここでは、前輪舵角や後輪舵角およびブレーキの制御によって実現させるヨーレートγのF/B値がそれぞれフロントステア要求ヨーレートF/B値、リアステア要求ヨーレートF/B値およびブレーキ要求ヨーレートF/B値として表してある。
【0048】
最終値演算制御許可判定部8は、F/F演算部6から伝えられるF/F要求値(要求ヨーレートF/F値)とF/B演算部7から伝えられるF/B要求値(要求ヨーレートF/B値)に基づいて、要求ヨーレート最終値を演算すると共に制御許可を出す制御対象を判定している。これにより、フロントステア、リアステア、ブレーキの3つの制御対象の中から制御許可が出されるものが決定される。例えば、要求ヨーレートF/F値や要求ヨーレートF/B値が発生していることを制御許可の判定条件としている。そして、最終値演算制御許可判定部8は、制御許可の判定条件を満たした制御対象に対して、実行要求および要求ヨーレート最終値を出力する。
【0049】
実行要求は、制御許可が判定された制御対象に対して、制御を実行させることを示す指令である。例えば、制御対象がフロントステアであればフロントステア実行要求、リアステアであればリアステア実行要求、ブレーキであればブレーキ実行要求が出される。要求ヨーレート最終値は、各制御対象によって最終的に発生させることを要求するヨーレートγの値である。この値は、制御対象毎に要求ヨーレートF/F値と要求ヨーレートF/B値を足すことにより求められる。すなわち、フロントステア要求ヨーレートF/F値とフロントステア要求ヨーレートF/B値とを足すことによりフロントステア要求ヨーレート最終値を求めている。また、リアステア要求ヨーレートF/F値とリアステア要求ヨーレートF/B値とを足すことによりリアステア要求ヨーレート最終値を求めている。さらに、ブレーキ要求ヨーレートF/F値とブレーキ要求ヨーレートF/B値とを足すことによりブレーキ要求ヨーレート最終値を求めている。そして、このように演算された各要求ヨーレート最終値が各種マネージャ9〜11に対して伝えられている。
【0050】
各種マネージャ9〜11は、最終値演算制御許可判定部8から伝えられる実行要求および要求ヨーレート最終値に基づいて、ヨーレート最終値を各ACT16〜19にて実現すべき要求制御量(要求物理量)に換算し、それを各ECU12〜14に伝える。具体的には、フロントステアを制御対象として車両横方向運動制御を実行する場合には、フロントステア要求ヨーレート最終値に対応する要求前輪操舵角が演算され、これがECU12、13に伝えられる。また、リアステアを制御対象として車両横方向運動制御を実行する場合には、リアステア要求ヨーレート最終値に対応する要求後輪操舵角が演算され、これがECU14に伝えられる。さらに、ブレーキを制御対象として車両横方向運動制御を実行する場合には、ブレーキ要求ヨーレート最終値に対応する要求各輪加算トルクが演算され、これがECU15に伝えられる。
【0051】
このとき、同じ制御対象を異なるACTの駆動によって制御する場合には、マネージャ9〜11にて、いずれのACTを駆動するか、もしくは、どのように制御量を分配するかなどを調停し、調停後の制御量を各ECU12〜15に伝えるようにしている。例えば、本実施形態では、フロントステアについては、後述するようにEPS16やギア比可変スタリングシステム(以下、VGRS(Variable Gear Ratio Steering)という)17にて制御しているため、これらのいずれか一方もしくは双方によってフロントステアを制御することになる。このような場合には、マネージャ9による調停後の要求前輪操舵角をEPS16やVGRS17を制御するための各ECU12、13に伝えるようにしている。
【0052】
各種ECU12〜15は、各制御対象を制御するための制御出力を発生させるものであり、各種マネージャ9〜11から伝えられた要求制御量を実現すべく各種ACT16〜19を制御する。各種ACT16〜19は、EPS−ACT16、VGRS−ACT17、アクティブリアステアリング(以下、ARS(Active Rear Steering)という)−ACT18および横滑り防止制御(以下、ESC(Electronic Stability Control)という)−ACT19で構成されている。これら各種ACT16〜19が各種ECU12〜15にて制御されることにより、EPS−ACT16およびVGRS−ACT17では要求前輪操舵角が実現されるようにフロントステア制御がなされ、ARS−ACT18では要求後輪操舵角が実現されるようにリアステア制御がなされ、ESC−ACT19では要求各輪加算トルクが実現されるようにブレーキ制御がなされる。
【0053】
また、各種ECU12〜15では、その時々の各種ACT16〜19の状態から、各種ACT16〜19のアベイラビリティを把握しているため、このアベイラビリティをアベイラビリティ演算部5に伝えることも行っている。アベイラビリティとしては、EPS−ACT16およびVGRS−ACT17にて制御されるフロントステア(前輪舵角)の制御可能範囲であるフロントステアアベイラビリティ、ARS−ACT18にて制御されるリアステア(後輪舵角)の制御可能範囲であるリアステアアベイラビリティ、および、ESC−ACT19にて制御されるブレーキ(各輪加算トルク)の制御可能範囲であるブレーキアベイラビリティが挙げられる。フロントステアアベイラビリティには、前輪舵角の絶対量に加えて前輪舵角の応答性を示す前輪舵角角速度(前輪舵角変化量)が含まれている。リアステアアベイラビリティには、後輪舵角の絶対量に加えて後輪舵角の応答性を示す後輪舵角角速度(後輪舵角変化量)が含まれている。ブレーキアベイラビリティには、各輪車軸トルクの絶対量に加えてブレーキの応答性を示す各輪車軸トルク変化量が含まれている。
【0054】
以上のような構成により、制御要求部1からの要求信号が入力されると、各種ACT16〜19のアベイラビリティや車両状態に応じたアベイラビリティを演算している。そして、このアベイラビリティに基づいて各種ACT16〜19を制御することで、より最適な車両横方向運動制御を実行するようにしている。
【0055】
続いて、上記したアベイラビリティ物理量変換部20やアベイラビリティ演算部5や制御対象選択部61(72)の詳細について説明する。
【0056】
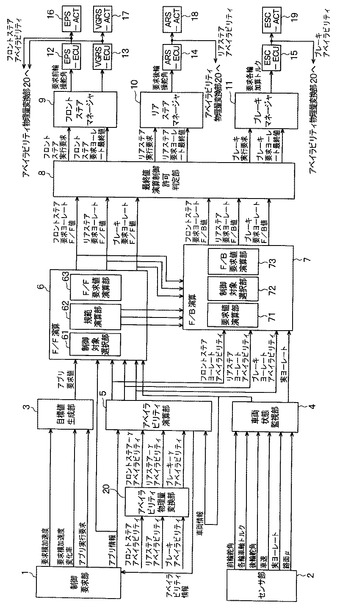
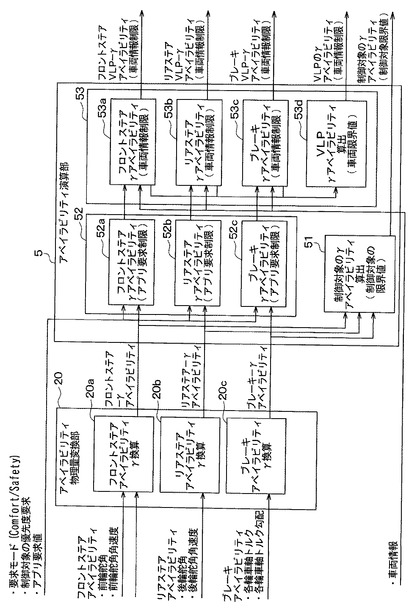
図2は、アベイラビリティ演算部5およびアベイラビリティ物理量変換部20の詳細構造を示したブロック図である。この図に示されるように、アベイラビリティ演算部5は、制御対象のγアベイラビリティ算出部51、アプリ要求制限部52および車両情報制限部53を有した構成とされている。
【0057】
アベイラビリティ物理量変換部20は、各種ECU12〜15より伝えられるアベイラビリティをヨーレート換算することで、各制御対象が発生させ得る限界としてのアベイラビリティを演算する。
【0058】
このアベイラビリティ物理量変換部20は、フロントアベイラビリティγ換算部20a、リアアベイラビリティγ換算部20b、ブレーキアベイラビリティγ換算部20cを有した構成とされている。
【0059】
フロントアベイラビリティγ換算部20aでは、フロントステアアベイラビリティをヨーレート換算したフロントステア−γアベイラビリティを算出する。リアアベイラビリティγ換算部20bでは、リアステアアベイラビリティをヨーレート換算したリアステア−γアベイラビリティを算出する。ブレーキアベイラビリティγ換算部20cでは、ブレーキアベイラビリティをヨーレート換算したブレーキ−γアベイラビリティを算出する。例えば、フロントステアアベイラビリティの場合、制御量が前輪舵角、制御量の変化量が前輪舵角角速度で表されているため、これらをヨーレート絶対量やヨーレート変化量dγ/dtに換算したものがフロントステア−γアベイラビリティとなる。リアステアアベイラビリティやブレーキアベイラビリティについても同様であり、後輪舵角や後輪舵角角速度もしくは各輪車軸トルクや各輪車軸トルク勾配をヨーレート絶対量やヨーレート変化量dγ/dtに換算したものがリアステア−γアベイラビリティもしくはブレーキ−γアベイラビリティとなる。
【0060】
アベイラビリティ演算部5が有する制御対象のγアベイラビリティ算出部51では、アベイラビリティ物理量変換部20の上記各換算部20a〜20cにて演算されたフロントステア−γアベイラビリティとリアステア−γアベイラビリティおよびブレーキ−γアベイラビリティの和を求めることにより、各制御対象のトータルのアベイラビリティ(制御対象の限界値)のヨーレート換算値である制御対象のγアベイラビリティを算出する。
【0061】
アプリ要求制限部52は、アプリ情報に含まれる要求モードや制御対象の優先度に基づいて、アプリケーションからの要求に応じた制限であるアプリ要求制限を行う。例えば、アプリケーションの要求として、ブレーキを用いたくないという要求が有る場合には、ブレーキ−γアベイラビリティを0にするなどの制限を掛ける。具体的には、アプリ要求制限部52は、フロントステアアプリ要求制限部52a、リアステアアプリ要求制限部52bおよびブレーキアプリ要求制限部52cを有した構成とされている。これら各アプリ要求制限部52a〜52cにより、アベイラビリティ物理量変換部20で演算された各γアベイラビリティに対してアプリ要求制限を行うことにより、フロントステア−γアベイラビリティとリアステア−γアベイラビリティおよびブレーキ−γアベイラビリティのアプリ要求制限を行った値を設定している。
【0062】
車両情報制限部53は、車両情報に含まれる車両走行に関する情報に基づいて、車両情報に応じた制限である車両情報制限を行う。例えば、走行路面が低μ路面である場合には、車輪スリップを回避するためにブレーキの使用を避ける方が好ましい。このため、例えば路面μがしきい値より低い場合には、低μ路面であるとして、ブレーキ−γアベイラビリティを0にするなどの制限を掛ける。具体的には、車両情報制限部53は、フロントステア車両情報制限部53a、リアステア車両情報制限部53b、ブレーキ車両情報制限部53cおよび車両限界値算出部53dとを有した構成とされている。各車両情報制限部53a〜53cにより、各アプリ要求制限部52a〜52cで演算されたアプリ要求制限後のγアベイラビリティに対して更に車両情報制限を行う。これにより、最終的にVLPとして出力し得る各制御対象でのγアベイラビリティ、すなわちフロントステアVLP−γアベイラビリティとリアステアVLP−γアベイラビリティおよびブレーキVLP−γアベイラビリティを設定している。
【0063】
また、車両限界値算出部53dでは、最終的にVLPとして出力し得るトータルのγアベイラビリティを算出している。具体的には、車両限界値算出部53dでは、車両情報制限部53a〜53cにて演算されたフロントステアVLP−γアベイラビリティとリアステアVLP−γアベイラビリティおよびブレーキVLP−γアベイラビリティの和を求めることにより、最終的に出力し得るトータルのVLP−γアベイラビリティ(車両限界値)を算出する。
【0064】
このようにして、アベイラビリティ演算部5では、各制御対象でのACT16〜19が発生させ得る限界を加味した各制御対象のアベイラビリティをアベイラビリティ物理量変換部20を介してヨーレート換算した値を、さらにアプリ要求や車両情報を加味して補正したVLPとしてのアベイラビリティを演算する。そして、VLPとしてのアベイラビリティに関する情報をF/F演算部6やF/B演算部7に対して伝えている。なお、アプリ要求とは、アプリ情報に示されるアプリ要求モードや制御対象の優先度に加えて、アプリ要求値を含むアプリケーションの要求を意味している。
【0065】
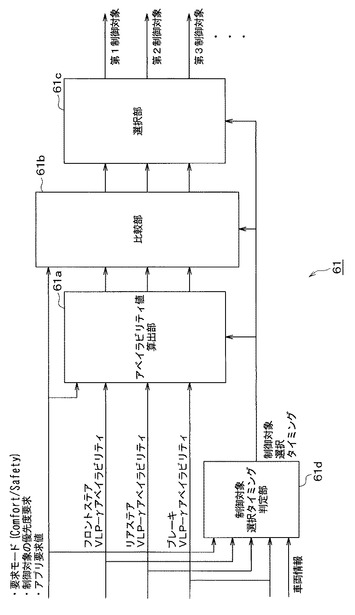
次に、制御対象選択部61(71)の詳細について説明する。図3は、制御対象選択部61の詳細構造を示したブロック図である。この図に示されるように、制御対象選択部61は、アベイラビリティ値算出部61a、比較部61b、選択部61c、制御対象選択タイミング判定部61dを有した構成とされている。
【0066】
アベイラビリティ値算出部61aでは、アプリ要求値やアプリ情報およびアベイラビリティ演算部5から伝えられた各アベイラビリティ、すなわちフロントステアVLP−γアベイラビリティとリアステアVLP−γアベイラビリティおよびブレーキVLP−γアベイラビリティから、各制御対象で実現し得るヨーレート絶対量とヨーレート変化量dγ/dtの値を算出する。具体的には、アベイラビリティ演算部5から伝えられた各アベイラビリティが制御量の絶対量およびその変化量を含んでいることから、それらがヨーレート絶対量とヨーレート変化量dγ/dtのマップとして表される。このマップを用いて、アプリ要求値やアプリ情報に対応するヨーレート絶対量とヨーレート変化量dγ/dtの値を算出している。
【0067】
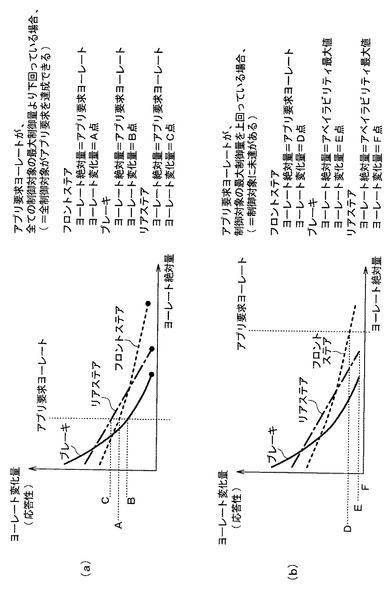
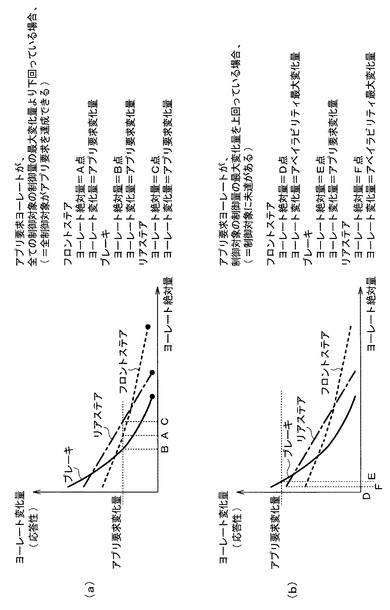
これについて、図4および図5を参照して説明する。図4は、アプリ要求モードがコンフォートの場合の選択パターンについて、アプリ要求ヨーレートをすべての制御対象で実現できる場合と、一部の制御対象でしか実現できない場合について示したものである。図5は、アプリ要求モードがセーフティの場合の選択パターンについて、アプリ要求変化量をすべての制御対象で実現できる場合と、一部の制御対象でしか実現できない場合について示したものである。
【0068】
例えば、アベイラビリティ演算部5から伝えられた各アベイラビリティに基づいて、各制御対象のヨーレート絶対量とヨーレート変化量dγ/dtのマップが図4および図5のように表されたとする。
【0069】
この場合において、アプリ要求モードがコンフォートである場合には、高い応答性よりもむしろ低い応答性で過度な負担を乗員にかけないようにアプリ要求値を実現できるようにしたり、より少ないACT数でそれを実現できるようにするのが好ましい。このため、この場合には、アプリ要求ヨーレートを基準にヨーレート絶対量およびヨーレート変化量dγ/dtを算出する。一方、アプリ要求モードがセーフティである場合には、緊急性を要するため、より高い応答性でアプリ要求値を実現できるようにするのが好ましい。このため、アプリ要求変化量を基準にヨーレート絶対量およびヨーレート変化量dγ/dtを算出する。
【0070】
具体的には、図4(a)に示すように、アプリ要求ヨーレートをすべての制御対象で実現できる場合、つまりアプリ要求ヨーレートがすべての制御対象の最大制御量(アベイラビリティ最大値)より小さい場合には、各制御対象のヨーレート絶対量はすべてアプリ要求ヨーレートになる。そして、ヨーレート変化量dγ/dtについては、各制御対象のマップとアプリ要求ヨーレートとが交差する点となる。すなわち、フロントステアについては、ヨーレート絶対量がアプリ要求ヨーレートとなり、ヨーレート変化量dγ/dtはA点となる。ブレーキについては、ヨーレート絶対量がアプリ要求ヨーレートとなり、ヨーレート変化量dγ/dtはB点となる。リアステアについては、ヨーレート絶対量がアプリ要求ヨーレートとなり、ヨーレート変化量dγ/dtはC点となる。
【0071】
一方、アプリ要求モードがコンフォートであり、かつ、図4(b)に示すように、アプリ要求ヨーレートを一部の制御対象でしか実現できない場合、つまりアプリ要求ヨーレートが一部の制御対象の最大制御量より大きい場合には、各制御対象のヨーレート絶対量やヨーレート変化量dγ/dtは次のようになる。すなわち、アプリ要求ヨーレートよりも制御対象の最大制御量が大きいフロントステアについては、ヨーレート絶対量がアプリ要求ヨーレートとなり、ヨーレート変化量dγ/dtはD点となる。リアステアおよびブレーキについては、ヨーレート絶対量がそれぞれの最大制御量となり、ヨーレート変化量dγ/dtはE、F点(E=F)となる。
【0072】
また、アプリ要求モードがセーフティであり、かつ、図5(a)に示すように、アプリ要求変化量をすべての制御対象で実現できる場合、つまりアプリ要求変化量がすべての制御対象の制御量の最大変化量(アベイラビリティ最大変化量)より小さい場合には、各制御対象のヨーレート変化量dγ/dtはすべてアプリ要求変化量となる。そして、ヨーレート絶対量については、各制御対象のマップとアプリ要求変化量とが交差する点となる。すなわち、フロントステアについては、ヨーレート変化量dγ/dtがアプリ要求変化量となり、ヨーレート絶対量はA点となる。ブレーキについては、ヨーレート変化量dγ/dtがアプリ要求変化量となり、ヨーレート絶対量はB点となる。リアステアについては、ヨーレート変化量dγ/dtがアプリ要求変化量となり、ヨーレート絶対量はC点となる。
【0073】
一方、アプリ要求モードがセーフティであり、かつ、図5(b)に示すように、アプリ要求変化量を一部の制御対象でしか実現できない場合、つまりアプリ要求変化量が一部の制御対象の制御量の最大変化量より大きい場合には、各制御対象のヨーレート絶対量やヨーレート変化量dγ/dtは次のようになる。すなわち、アプリ要求変化量よりも制御対象の制御量の最大変化量が大きいブレーキについては、ヨーレート変化量dγ/dtがアプリ要求変化量となり、ヨーレート絶対量はE点となる。フロントステアおよびリアステアについては、ヨーレート変化量dγ/dtがそれぞれの最大変化量となり、ヨーレート絶対量はD、F点(D=F)となる。
【0074】
比較部61bでは、アプリ要求値、つまりアプリ要求ヨーレートやアプリ要求変化量とアベイラビリティ値算出部61aにて算出された各制御対象で実現し得るヨーレート絶対量やヨーレート変化量dγ/dtの値を比較する。例えば、アプリ要求値よりも各制御対象でのヨーレート絶対量やヨーレート変化量dγ/dtが大きいかの大小比較、つまり各制御対象によってアプリ要求値を達成できるか否かを比較し、どの制御対象が達成でき、どの制御対象が未達であるかを求める。例えば、アプリ要求値としてアプリ要求ヨーレートが5であった場合に、フロントステアやリアステアおよびブレーキのそれぞれのヨーレート絶対量が8、6、3であったとする。この場合には、フロントステアおよびリアステアについては達成となり、ブレーキについては未達となる。また、アプリ要求変化量が3であった場合に、フロントステアやリアステアおよびブレーキのそれぞれのヨーレート絶対量が5、6、7であったとする。この場合には、フロントステアやリアステアおよびブレーキすべてについては達成となる
このような比較を、アプリ要求ヨーレートとアベイラビリティ値算出部61aで算出されたヨーレート絶対値に対して行うと共に、アプリ要求変化量とアベイラビリティ値算出部61aで算出されたヨーレート変化量それぞれに対して行う。
【0075】
選択部61cでは、比較部61bによる比較結果に基づいて制御対象を選択することで、制御対象を制御するための制御対象選択を行う。
【0076】
制御対象選択では、アプリ要求モードに応じたアプリ要求値の実現が可能となるように、どの制御対象を制御するかを選択する。各制御対象の中で最も優先的に選択されるものを第1制御対象として、第1制御対象のみでアプリ要求モードに応じたアプリ要求値の実現が可能でない場合には第2制御対象を選択し、それでも実現が可能でない場合には第3制御対象を選択する。このときの第1〜第3制御対象の選択順序について、アプリ要求モードに応じて変えている。
【0077】
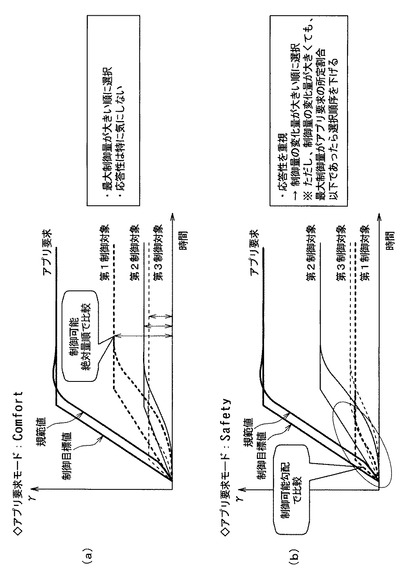
この制御対象選択の考え方について、図6を参照して説明する。図6は、アプリ要求値と第1〜第3制御対象の選択順の一例を示した図であり、図6(a)は、アプリ要求モードがコンフォートの場合、図6(b)は、アプリ要求モードがセーフティの場合を示している。
【0078】
図6(a)、(b)に示すように、アプリ要求ヨーレートに対して規範値が設定され、その規範値を満たすべく、制御対象選択を行う。アプリ要求モードがコンフォートの場合には、高い応答性が必要でないため、図6(a)に示すように、ヨーレート絶対量の大きい順に第1〜第3制御対象を選択する。このようにすれば、よりヨーレート絶対量の大きいものから順番に車両横方向運動制御に使用する制御対象を選択でき、より少ない制御対象数で車両横方向運動制御が行えるため、制御対象同士の干渉による車両横方向運動の振動発生量を最小限にすることが出来ることから、不必要に制御対象数を多くする場合と比較して快適性を増すことができる。
【0079】
これに対して、アプリ要求モードがセーフティの場合には、高い応答性が必要とされるため、図6(b)に示すように、ヨーレート変化量dγ/dtが大きい順に第1〜第3制御対象を選択する。このようにすることで、快適性よりも安全性を重視して、より応答性の高い車両横方向運動制御が行えるようにすることが可能となる。ただし、ヨーレート変化量dγ/dtが大きかったとしても、その制御対象のヨーレート絶対量が小さいと緊急性に対応できないため、例えばヨーレート絶対量がアプリ要求ヨーレートの所定割合以下である場合には、選択順序を下げるようにすることもできる。
【0080】
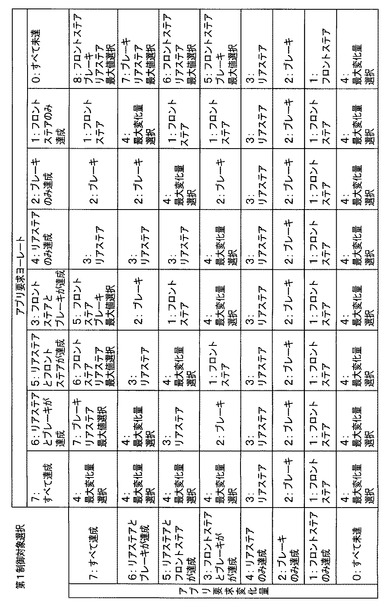
このような考え方に基づく制御対象選択の一例について、図7(a)〜(c)および図8(a)〜(c)に示すマップを参照して説明する。
【0081】
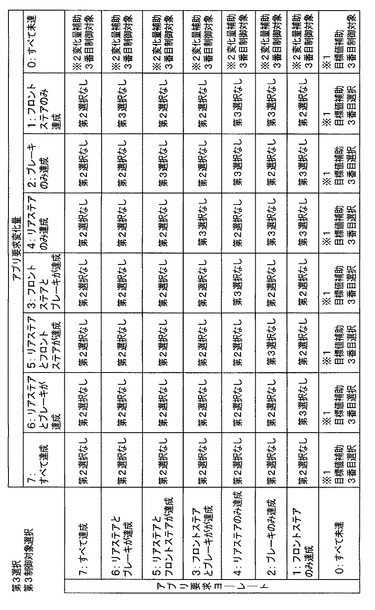
図7(a)〜(c)は、アプリ要求モードがコンフォートである場合の制御対象選択用のマップであり、図8(a)〜(c)は、アプリ要求モードがセーフティである場合の制御対象選択用のマップである。図7(a)および図8(a)は、各制御対象の中で最も優先的に選択される第1制御対象の選択用マップであり、図7(b)、(c)および図8(b)、(c)は、第1制御対象が選択された後に、二番目、三番目に優先的に選択される第2、第3制御対象選択用マップである。
【0082】
まず、図7(a)のマップを用いて、アプリ要求ヨーレートを満たしているか否かの比較結果について選択する。例えば、上記した例で言えば、「5:リアステアとフロントステアが達成」という項目が選択される。続いて、図7(a)のマップから、アプリ要求変化量を満たしているか否かの比較結果について選択する。上記した例でいれば、「7:すべて達成」という項目が選択される。そして、これら各項目の縦方向の欄と横方向の欄の交差する欄である「6:フロントステアとリアステアの最大値選択」が選択される。この場合には、フロントステアとリアステアのうちヨーレート絶対量が最大のものが第1制御対象として選択されることになる。
【0083】
次に、図7(b)のマップを用いて、アプリ要求ヨーレートを満たしているか否かの比較結果について選択する。例えば、上記した例で言えば、「5:フロントステアとリアステアが達成」という項目が選択される。続いて、図7(b)のマップから、アプリ要求変化量を満たしているか否かの比較結果について選択する。上記した例でいれば、「7:すべて達成、※第1は勾配が最大の制御対象」という項目が選択される。そして、これら各項目の縦方向の欄と横方向の欄の交差する欄である「第2選択なし」が選択される。この場合には、第2制御対象の選択はないこととなる。
【0084】
更に、図7(c)のマップを用いて、アプリ要求ヨーレートを満たしているか否かの比較結果について選択する。例えば、上記した例で言えば、「5:フロントステアとリアステアが達成」という項目が選択される。続いて、図7(c)のマップから、アプリ要求変化量を満たしているか否かの比較結果について選択する。上記した例でいえば、「7:すべて達成」という項目が選択される。そして、これら各項目の縦方向の欄と横方向の欄の交差する欄である「第2選択なし」が選択される。この場合には、第3制御対象の選択もないこととなる。
【0085】
また、ここでは要求モードがコンフォートの場合の第1〜第3制御対象の選択手法について説明したが、要求モードがセーフティの場合の第1〜第3制御対象の選択手法についても、図7(a)〜(c)に代えて図8(a)〜(c)のマップを用いること以外は同様である。
【0086】
なお、図7(a)〜(c)に示すマップでは、基本的に、ヨーレート絶対量が大きい制御対象から順に選択されるようにし、常時すべての制御対象を選択するのではなく、必要な制御対象のみが選択されるようにしている。また、アプリ要求ヨーレートもアプリ要求変化量も共に1つの制御対象で達成できるときは、単独の制御対象を選択制御対象としている。また、アプリ要求ヨーレートを2つ以上の制御対象で達成しているときにはヨーレート要求変化量を加味して選択する。さらに、アプリ要求ヨーレートをすべての制御対象で達成していて、かつ、アプリ要求変化量がすべての制御対象で未達の場合には、ヨーレート絶対量が最大のものではなく、ヨーレート変化量dγ/dtが最大の制御対象を選択することで、作動させる制御対象の数をより少なくできるようにしている。
【0087】
一方、図8(a)〜(c)に示すマップでは、基本的に、ヨーレート変化量dγ/dtが大きい制御対象から順に選択されるようにし、常時すべての制御対象を選択するのではなく、必要な制御対象のみが選択されるようにしている。また、アプリ要求ヨーレートもアプリ要求変化量も共に1つの制御対象で達成できるときは、単独の制御対象を選択制御対象としている。また、アプリ要求変化量を2つ以上の制御対象で達成しているときにはヨーレート絶対量を加味して選択する。さらに、アプリ要求変化量をすべての制御対象で達成していて、かつ、アプリ要求ヨーレートがすべての制御対象で未達の場合には、ヨーレート変化量dγ/dtが最大のものではなく、ヨーレート絶対量が最大の制御対象を選択することで、作動させる制御対象の数をより少なくできるようにしている。
【0088】
このようにして、制御対象選択部61による制御対象選択が完了すると、規範演算部62にて、アプリ要求ヨーレートおよび選択制御対象のアベイラビリティから選択制御対象の規範値を演算したり、F/F要求値演算部63にて、F/F要求値が演算される。これに基づいて、F/F演算部6や最終値演算制御許可判定部8および各種マネージャ9〜11が上記のような動作を行い、各種マネージャ9〜11から各種ECU12〜15に対して要求制御量が伝えられ、各種ECU12〜15が各ACT16〜19を駆動することで、アプリケーションの要求に応じた車両横方向運動を実現することが可能となる。
【0089】
制御対象選択タイミング判定部61dは、制御対象を選択するときの優先順位決定条件となるアプリ要求や車両情報およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティに基づいて、上記手法による制御対象の選択タイミングを判定する。具体的には、最初の制御対象の選択は、アプリ要求が出されたとき(車両横方向運動制御にかかわる制御要求が出されたとき)、例えばレーンキープ制御やレーンデパーチャ制御などが実行されたタイミングで行われる。しかしながら、制御対象を選択するときの優先順位を決定する優先順位決定条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティの変化等によっては、制御対象優先度を再考する必要がある。このため、制御対象選択タイミング判定部61dでは、車両横方向運動制御にかかわる制御要求が出されたときに制御対象の選択タイミングと判定したのちにも、アプリ情報や車両状態監視部4からの車両情報を取得すると共にアベイラビリティ演算部5での演算結果を取得し、これらの情報に基づいて選択制御対象の再考を行う。
【0090】
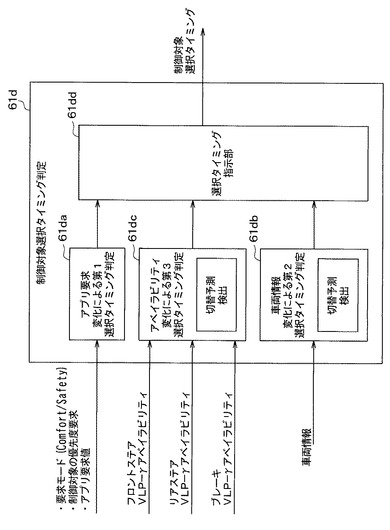
図9は、制御対象選択タイミング判定部61dの詳細構造を示したブロック図である。この図に示すように、制御対象選択タイミング判定部61dは、アプリ要求変化による第1選択タイミング判定部61da、車両情報変化による第2選択タイミング判定部61db、アベイラビリティ変化による第3選択タイミング判定部61dcおよび選択タイミング指示部61ddを有した構成とされている。
【0091】
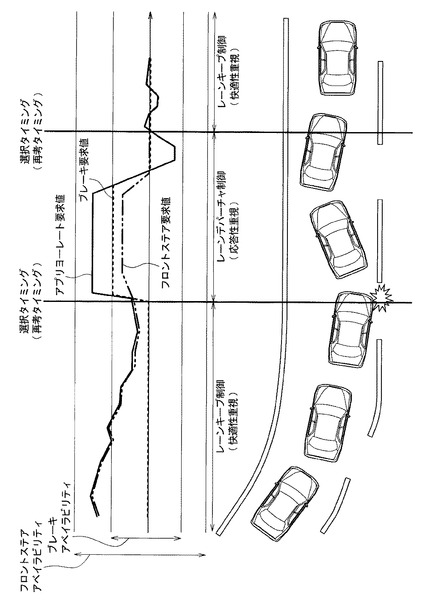
アプリ要求変化による第1選択タイミング判定部61daでは、アプリ情報に示されるアプリ要求モードの内容変更などに基づいて、制御対象選択タイミングであることを判定する。アプリ情報の変更としては、例えばコンフォートからセーフティへの変更などのように、アプリ要求モードが変更された場合が挙げられる。これについて、図10に、アプリ要求モードがコンフォートからセーフティへ変更されたときの車両挙動とアベイラビリティの変化を表した模式図を示し、この図を参照して説明する。
【0092】
レーンキープ制御が実行されると、レーンキープ制御中には快適性が重視されるため、制御対象選択部61より選択される制御対象としてアベイラビリティの最大値が小さいブレーキよりもアベイラビリティの最大値が大きいフロントステア(もしくはリアステア)が優先的に選択される。しかしながら、車両が走行車線の両側の走行線を越えそうになって、レーンデパーチャ制御に切り替わると、それに伴ってアプリ要求モードがコンフォートからセーフティに切り替わる。このため、制御対象選択タイミング判定部61dでは、アプリ要求モードを監視しておき、これが切り替わった時には選択タイミングであると判定して、制御対象選択部61の各部に対して制御対象選択を行わせる旨を示す信号を出力する。これに基づいて、制御対象選択部61では、上記手法による制御対象選択を再び行うことで、選択制御対象を再考し、切り替わったアプリ要求モードに伴った制御対象を改めて選択することが可能となる。ここでは、アベイラビリティの応答性の良いブレーキが優先的に選択される。
【0093】
また、図10中に示したように、レーンデパーチャ制御が終了して再びレーンキープ制御に切り替わると、再びアプリ要求モードの切替えに伴った制御対象選択を行わせる旨の信号が出力される。これにより、また選択制御対象が再考され、再びレーンキープ制御に適した制御対象が選択されることとなる。
【0094】
このように、アプリ要求が変化したとき、例えばアプリ要求モードとして快適性重視のコンフォートモードと応答性重視のセーフティモードが有る場合においてその要求モードが変化したときを選択タイミングとし、このタイミングで選択制御対象を再考させている。これにより、アプリ要求に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0095】
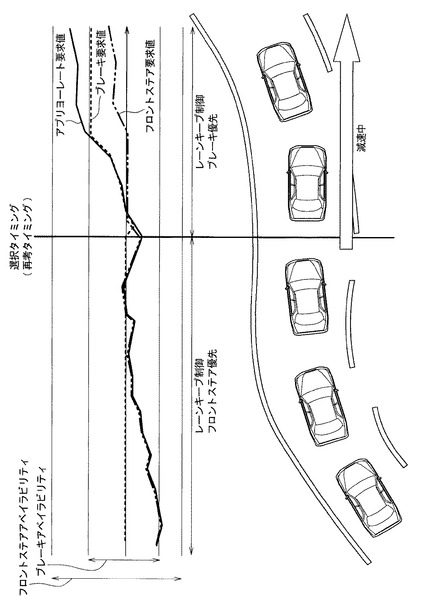
車両情報変化による第2選択タイミング判定部61dbでは、車両情報として示される車両状態などの変化に基づいて、制御対象選択タイミングであることを判定する。車両状態の変化としては、例えば車両が減速した場合などが挙げられる。これについて、図11に、レーンキープ制御中の選択制御対象がフロントステアである場合において車両が減速したときの車両挙動とアベイラビリティの変化を表した模式図を示し、この図を参照して説明する。
【0096】
例えば、レーンキープ制御中に車両が減速した場合には、他の制御対象と比較してアベイラビリティの最大値が小さい場合でもブレーキが優先的に制御対象として選択されるようにした方がエネルギーの損失が少ない。すなわち、下り坂や速度超過でのコーナー進入時などで減速しながら旋回しなければならない際には、フロントステアもしくはリアステア制御を優先するよりもブレーキ制御が優先されるようにすると、ブレーキ発生モーメントによる旋回が可能となるため、高い減速性能を得つつ、高い旋回性能が得られる。そして、制動に使用されるエネルギーをフロントステアもしくはリアステア制御用に分配して旋回することができるため、旋回に必要とされるエネルギーを低減することが可能となり、エネルギーの損失を少なくすることができる。
【0097】
このように、例えばレーンキープ制御において下り坂や速度超過でのコーナ侵入時など、車両が減速されるような車両状態が変化するときを選択タイミングとし、そのタイミングで制御対象を再考させるようにすることもできる。
【0098】
また、第2選択タイミング判定部61dbには、切替予測検出機能も備えられており、車両状態の変化に伴う制御対象の切り替え予測を行うこともできる。図12は、アプリケーションの要求に基づいてブレーキ制御によって車両横方向運動制御が実行されているときに、低μ路が検出された場合を示した模式図である。
【0099】
車両状態が変化した場合、現在の選択制御対象をそのまま維持すると好ましく無い場合、もしくはアプリ要求値を満たさなくなる場合がある。このような場合には、一旦選択された制御対象をそのまま維持するのではなく、他の制御対象に切替えた方がアプリ要求値を満たす上で好ましい。このため、車両状態に基づいて選択制御対象の切り替えを行うべきである状況を予測し、それを予測したタイミングを選択制御対象切替タイミングとして選択制御対象を再考させるようにする。
【0100】
例えば、図12の例のように、ブレーキ制御により車両横方向運動制御が実行されている場合において、車両情報として前輪のスリップなどに基づいて走行路面が低μ路であることが検出されたときには、後輪側でブレーキを用いると後輪スリップが発生する可能性がある。このような場合には、制御対象をブレーキとするのではなく、リアステアに切替えた方が車両安定化を図るために好ましい。このように、走行路面が低μ路であることが検出された場合などを選択制御対象切替タイミングとし、このタイミングで選択制御対象を再考させることで、車両情報に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0101】
このように、車両情報に表される車両状態が変化したとき、例えば下り坂で車両が減速した場合を選択タイミングとし、このタイミングで選択制御対象を再考させている。これにより、車両情報に基づいて、より適切な制御対象が選択されるようにすることが可能となる。また、車両情報に表される車両状態の変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択対象切替予測タイミングとして選択制御対象を再考させている。これによっても、車両情報に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0102】
アベイラビリティ変化による第3選択タイミング判定部61dcでは、アベイラビリティ演算部5から伝えられるアベイラビリティの変化に基づいて、制御対象選択タイミングであることを判定する。アベイラビリティの変化としては、例えばACT16〜19の機能の変化などが挙げられる。これについて、図13に、フロントステアを制御するためのACT16、17がフェールにより駆動できなくなったときの車両挙動とアベイラビリティの変化を表した模式図を示し、この図を参照して説明する。
【0103】
例えば、アプリケーションの要求に基づいて車両横方向運動制御が実行されているときに、その車両横方向運動制御を実行するために用いている制御対象がフェールすると、その制御対象を用いた車両横方向運動制御が行えなくなる。このため、制御対象選択タイミング判定部61dでは、アベイラビリティ演算部5で演算された各アベイラビリティを監視しておき、任意のアベイラビリティが急変したとき、例えば単位時間当たりのアベイラビリティの変化量が所定の閾値を超えている場合に選択タイミングであると判定して、制御対象選択部61に対して制御対象選択を行わせる旨を示す信号を出力する。これに基づいて、制御対象選択部61では、上記手法による制御対象選択を再び行うことで、選択制御対象を再考し、切り替わったアベイラビリティの変化に伴った制御対象を改めて選択することが可能となる。例えば、図13の例の場合のように、フロントステアのフェールによりフロントステアのアベイラビリティが急変したときには、それに伴って制御対象が改めて選択され、フェールしていないリアステアによって車両横方向運動制御が行われるようになる。このように、アベイラビリティの変化に伴って制御対象を再考させることができる。
【0104】
なお、ここでは、フロントステアのフェール時にリアステアが選択制御対象なる場合について説明したが、リアステア制御による最大制御量がアプリ要求値に満たなければ、リアステアおよびフロントステア以外の制御対象として、ブレーキが選択制御対象となり、アプリ要求値を満たす車両横方向制御が実行されることになる。
【0105】
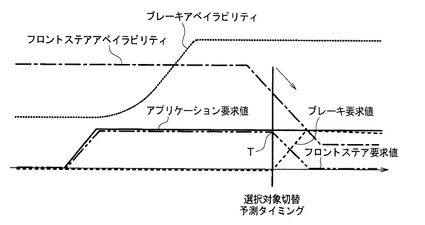
また、第3選択タイミング判定部61dcには、切替予測検出機能も備えられており、アベイラビリティの変化に伴う制御対象の切り替え予測を行うこともできる。図14は、アプリケーションの要求に基づいてフロントステア制御によって車両横方向運動制御が実行されているときに、フロントステアのアベイラビリティが低下する場合を示した模式図である。
【0106】
アベイラビリティの変化により、選択制御対象のアベイラビリティが低下してアプリ要求値を満たさない状態となることがある。このような場合には、一旦選択された制御対象をそのまま維持するのではなく、アベイラビリティの低下に伴って他の制御対象に切替えた方がアプリ要求値を満たす上で好ましい。このため、アベイラビリティの変化に基づいて選択制御対象の切り替えを行うべきである状況を予測し、それを予測したタイミングを選択制御対象切替タイミングとして選択制御対象を再考させるようにする。
【0107】
例えば、図14の例のようにフロントステアのアベイラビリティが低下する代わりにブレーキのアベイラビリティが上昇するような場合には、以下の2つの条件が成り立つ時に選択対象切替予測タイミングであると判定することができる。
【0108】
(1)ブレーキアVLP−γベイラビリティ≧フロントステアVLP−γアベイラビリティ×余裕度
(2)アプリ要求値>フロントステアVLP−γアベイラビリティ(n)−フロントステアVLP−γベイラビリティ(n−1)×所定時間
なお、条件(2)における所定時間とは、ブレーキの無駄時間と応答性を考慮した値であり、例えば200ms程度と想定される。条件(1)における余裕度は、ブレーキアベイラビリティの制御余裕度であり、アプリ要求に対応できるマージンをもたせる値であり、例えば120%程度と想定される。
【0109】
条件(1)、(2)は、制御対象の再考の回数をできるだけ少なくしつつ、フロントステア制御でアプリ要求値を実現できなくなる状況を的確に判定できるように設定されている。すなわち、図中の点Tで示しているのは、フロントステアVLP−γアベイラビリティの低下に伴ってアプリ要求値を下回り、満たせなくなるタイミングからブレーキ制御の応答性に基づき、ブレーキ制御が立ち上がるまでの時間を考慮したタイミングである。このフロントステアに対する要求値(要求ヨーレート最終値)を低下させ、フロントステア制御の不足分をブレーキ制御によって補わなければならない。つまり、条件(2)の右辺がアプリ要求値を下回る状況になれば、ブレーキ制御による制御量が立ち上がっても、アプリ要求値を満たさなくなる期間が発生し得るため、この条件を選択対象切替予測タイミングとしている。
【0110】
ただし、このような条件(2)を満たしたとしても、フロントステアVLP−γアベイラビリティよりもブレーキVLP−γアベイラビリティが大きくなければ、制御対象選択によって制御対象がフロントステアからブレーキに切り替わらない。このため、条件(1)を付けることにより、制御対象の再考の回数ができるだけ少なくなるようにしている。
【0111】
このように、アベイラビリティが変化したとき、例えば制御対象にフェールが発生した場合を選択タイミングとし、このタイミングで選択制御対象を再考させている。これにより、アベイラビリティに基づいて、より適切な制御対象が選択されるようにすることが可能となる。また、アベイラビリティの変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択対象切替予測タイミングとして選択制御対象を再考させている。これによっても、アベイラビリティに基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0112】
選択タイミング指示部61ddは、第1〜第3選択タイミング判定部61da〜61dcの少なくとも1つで選択タイミングであると判定されたときに、その判定結果に基づいて、制御対象判定タイミングであることを示す信号を出力する。この信号をトリガーとして、制御対象選択部61の他の構成、つまりアベイラビリティ値算出部61aや比較部61bおよび選択部61cが上述した各演算などを行うことで、制御対象選択を実行する。
【0113】
このようにして、各制御対象を制御するためのACT16〜19の機能的なアベイラビリティ(制御量およびその変化量)を加味してACT16〜19のいずれを用いて、どのように制御量を発生させるかを最適に選択することが可能となる。
【0114】
以上説明したように、本実施形態にかかるVLPでは、異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う。この車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をVLP、より詳しくはVLPのF/F演算部6やF/B演算部7に伝え、アベイラビリティに基づいて車両横方向運動制御に使用する制御対象の優先順位を決定し、その優先順位に基づいて選択制御対象を設定している。
【0115】
このように、各制御対象のアベイラビリティを加味して車両横方向運動制御に使用する制御対象の優先順位を決定して選択制御対象を設定しているため、制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
【0116】
また、アプリケーションからのコンフォートやセーフティ等の要求モードに基づいて、横方向運動制御に使用する制御対象の優先順位を決定して選択制御対象を設定している。このため、応答性を考慮せずに快適性を重視する場合や緊急性に対応して応答性を重視する場合など、状況ごとに適した優先順位で選択制御対象を設定することができる。
【0117】
そして、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定している。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させるようにしている。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
【0118】
(他の実施形態)
上記実施形態では、車両運動制御の一例として車両横方向運動制御を行うVLPについて説明したが、車両前後方向運動制御や車両ロール方向運動制御などを行う車両運動制御装置についても、本発明を適用することができる。
【0119】
すなわち、複数の制御対象を備え、それら複数の制御対象それぞれによって同じ方向の車両運動制御を行うことができる車両運動制御システムの制御を行う車両運動制御装置について、本発明を適用することができる。この場合であっても、各制御対象のアベイラビリティを車両運動制御装置に伝え、車両運動制御装置にて伝えられたアベイラビリティを加味して車両運動制御に使用する制御対象の優先順位を設定することで、制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
【0120】
例えば、車両前後方向運動制御であれば制御対象としてブレーキや駆動力(エンジン出力もしくはモータ出力)などを挙げられ、車両ロール方向運動制御であれば制御対象としてサスペンションやアクティブスタビライザーなどが挙げられる。また、車両横方向運動制御についても、各制御対象を制御するためのACT例を挙げたが、他のACTを使用しても良い。例えば、上記実施形態ではブレーキ制御をESC−ACT19にて行ったが、駐車ブレーキを用いても良いし、インホイールモータなどの各輪車軸トルクを制御するものとして駆動力を制御するようにしても良い。
【0121】
なお、上記実施形態では、優先順位決定条件が変化して選択制御対象を再考させる場合の一例を示したが、優先順位決定条件が上記とは異なった変化を示した場合であっても、勿論、選択制御対象を再考させるようにできる。このようにしても、上記実施形態と同様の効果を得ることができる。
【0122】
また、上記実施形態では、アプリケーションの内容に応じた要求モードに基づいて、車両運動制御を行う緊急度を判定するようにしているが、緊急度を数値などによって示し、その数値が閾値以上であるか否かに基づいて、緊急度が高いか否かを判定するようにしても良い。そして、緊急度が高い場合には、制御対象選択の際に制御量の変化量が大きいものを優先して選択するようにし、緊急度が高くない場合には、制御対象選択の際に最大制御量が大きいものを優先して選択するようにすることができる。
【符号の説明】
【0123】
1…制御要求部、2…センサ部、3…目標値生成部、4…車両状態監視部、5…アベイラビリティ演算部、6…F/F演算部、7…F/B演算部、8…最終値演算制御許可判定部、9〜11…マネージャ、12〜14…ECU、16〜19…ACT、20…アベイラビリティ物理量変換部、51…制御対象のγアベイラビリティ算出部、52…アプリ要求制限部、53…車両情報制限部、61…制御対象選択部、61d…制御対象選択タイミング判定部、61da〜61dc…第1〜第3選択タイミング判定部、61dd…選択タイミング指示部、62…規範演算部、63…F/F要求値演算部、71…要求値演算部、72…制御対象選択部、73…F/B要求値演算部
【技術分野】
【0001】
本発明は、車両の運動制御を複数の制御対象の協調により行う車両運動制御装置に関するものである。
【背景技術】
【0002】
従来、特許文献1において、車両のオーバステア(以下、OSという)状態またはアンダーステア(以下、USという)状態の進行に応じて、まず前後輪間の駆動力配分の変更を実行したのち、その状態が進行したら操舵角の補正を実行し、それでも更にその状態が進行したら選択された車輪の選択的制動を実行するという車両が開示されている。
【0003】
また、特許文献2において、USの度合いに応じて、その度合いが大きくなるに従って電動パワーステアリング装置(以下、EPSという)による反力抑制制御、報知装置による報知、制動力配分制御の順に作動させる車両用US制御装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特許第4297150号公報
【特許文献2】特許第4455379号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載された車両では、OS状態もしくはUS状態を解消するための制御要求値を実現する際に、使用する制御装置および作動順序を決めているだけである。また、特許文献2に記載された車両用US制御装置では、USを抑制するための制御要求値を実現するために、不足している制御量を段階的に補うように複数の制御対象を順番に作動させているだけである。すなわち、特許文献1、2では、車両の横方向運動制御を複数の制御対象の協調によって実行することについて開示されているものの、各制御装置の制御可能範囲(アベイラビリティ)に基づいて、どの制御対象を優先的に作動させるのがより最適な制御を行えるかなどについて考慮されていない。例えば、アベイラビリティの一つである制御量の大きさが制御対象によって異なっている場合に、その制御量の大きさだけを基準として制御対象を決定したのでは、緊急時などの制御応答性が要求される場面で応答性良い制御出力を発生させることができない。したがって、複数の制御対象を用いてより最適な車両運動制御が実行されるようにすることが望まれる。
【0006】
なお、ここでは、車両の横方向運動について述べたが、車両の前後方向運動やピッチング方向運動等についても、同様のことが言える。
【0007】
本発明は上記点に鑑みて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、請求項1に記載の発明では、複数の制御対象(12〜19)によって同じ方向の車両運動制御を行うことで、要求制御量を実現する車両運動制御装置において、複数の制御対象(12〜19)の中から車両運動制御を行うために使用する制御対象の優先順位を優先順位決定条件に基づいて決定することで制御対象を選択する制御対象選択手段(61、72)を有し、制御対象選択手段(61、72)は、優先順位決定条件の変化を検出し、該優先順位決定条件の変化を検出したことを選択タイミングとして、制御対象の選択を再度行わせる制御対象選択タイミング判定部(61d)を備えていることを特徴としている。
【0009】
このように、優先順位決定条件に基づいて、制御対象の選択タイミングを判定している。すなわち、最初に制御対象が選択されたのち、制御対象を選択するときの優先順位決定条件が変化したときに、それに基づいて選択制御対象を再考させるようにしている。これにより、より最適な制御対象を選択して車両運動制御を円滑に行うことが可能となる。
【0010】
例えば、請求項2に記載したように、制御対象選択手段(61、72)は、優先順位決定条件として、複数の制御対象(12〜19)それぞれの最大制御量および制御量の変化量を含む制御可能範囲に相当するアベイラビリティ、車両状態を示す車両情報、車両運動制御を実行するアプリケーションからの要求の少なくとも1つを用いることができる。
【0011】
請求項3に記載したように、優先順位決定条件としてアベイラビリティを含まれる場合、制御対象選択タイミング判定部(61d)では、単位時間当たりのアベイラビリティの変化量が閾値を超えたときを選択タイミングとすることができる。
【0012】
このように、アベイラビリティの変化に伴って制御対象を再考させるようにすることもでき、アベイラビリティの変化に対応した最適な制御対象が改めて選択されるようにできる。アベイラビリティの変化としては、例えば車両運動制御を行うためのアクチュエータ(16〜19)の機能の変化などが挙げられる。例えば、フロントステアのフェールによりフロントステアのアベイラビリティが急変したときには、それに伴って制御対象が改めて選択され、フェールしていないリアステアによって車両横方向運動制御を行われるようにすることができる。このように、アベイラビリティの変化に伴って制御対象を再考させるようにすることもできる。
【0013】
また、請求項4に記載したように、優先順位決定条件としてアベイラビリティが含まれる場合、制御対象選択タイミング判定部(61d)は、アベイラビリティの変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択タイミングとすることができる。
【0014】
このように、アベイラビリティの変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択対象切替予測タイミングとして選択制御対象を再考させることにより、アベイラビリティに基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0015】
また、請求項5に記載したように、優先順位決定条件として車両情報が含まれる場合、制御対象選択タイミング判定部(61d)では、車両情報に表される車両状態が変化したときを選択タイミングとすることができる。
【0016】
このように、車両情報に表される車両状態が変化したとき、例えば下り坂で車両が減速した場合を選択タイミングとし、このタイミングで選択制御対象を再考させることにより、車両情報に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0017】
また、請求項6に記載したように、優先順位決定条件として車両情報が含まれる場合、制御対象選択タイミング判定部(61d)は、車両情報に表される車両状態の変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択タイミングとすることができる。
【0018】
このように、車両情報に表される車両状態の変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択対象切替予測タイミングとして選択制御対象を再考させることにより、車両情報に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0019】
例えば、請求項7に記載したように、車両情報に表される車両状態として走行路面状態が変化したとき、選択する制御対象の切り替えを行うべき状況であると予測することができる。
【0020】
請求項8に記載したように、優先順位決定条件としてアプリケーションからの要求が含れる場合、制御対象選択タイミング判定部(61d)では、アプリケーションからの要求として少なくとも快適性重視の車両運動制御を行うコンフォートモードか安全性重視の車両運動制御を行うセーフティモードかの要求モードを取得し、該要求モードが変化したときを選択タイミングとすることができる。
【0021】
このように、アプリ要求モードとして快適性重視のコンフォートモードと応答性重視のセーフティモードが有る場合、その要求モードが変化したときを選択タイミングとし、このタイミングで選択制御対象を再考させることで、アプリ要求に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0022】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0023】
【図1】本発明の第1実施形態にかかる車両横方向運動制御システムのブロック図である。
【図2】アベイラビリティ物理量変換部20とアベイラビリティ演算部5の詳細構造を示したブロック図である。
【図3】制御対象選択部61の詳細構造を示したブロック図である。
【図4】アプリ要求モードがコンフォートの場合において、アプリ要求ヨーレートをすべての制御対象で実現できる場合と、一部の制御対象でしか実現できない場合の選択パターンを示した図である。
【図5】アプリ要求モードがセーフティの場合において、アプリ要求変化量をすべての制御対象で実現できる場合と、一部の制御対象でしか実現できない場合の選択パターンを示した図である。
【図6】アプリ要求値と第1〜第3制御対象の選択順の一例を示した図であり、(a)は、アプリ要求モードがコンフォートの場合の図、(b)は、アプリ要求モードがセーフティの場合の図である。
【図7(a)】アプリ要求モードがコンフォートである場合の第1制御対象選択用のマップである。
【図7(b)】アプリ要求モードがコンフォートである場合の第2制御対象選択用のマップである。
【図7(c)】アプリ要求モードがコンフォートである場合の第3制御対象選択用のマップである。
【図8(a)】アプリ要求モードがセーフティである場合の第1制御対象選択用のマップである。
【図8(b)】アプリ要求モードがセーフティである場合の第2制御対象選択用のマップである。
【図8(c)】アプリ要求モードがセーフティである場合の第3制御対象選択用のマップである。
【図9】制御対象選択タイミング判定部61dの詳細構造を示したブロック図である。
【図10】アプリ要求モードがコンフォートからセーフティへ変更されたときの車両挙動とアベイラビリティの変化を表した模式図である。
【図11】レーンキープ制御中の選択制御対象がフロントステアである場合において車両が減速したときの車両挙動とアベイラビリティの変化を表した模式図である。
【図12】アプリケーションの要求に基づいてブレーキ制御によって車両横方向運動制御が実行されているときに、低μ路が検出された場合を示した模式図である。
【図13】フロントステアを制御するためのACT16、17がフェールにより駆動できなくなったときの車両挙動とアベイラビリティの変化を表した模式図である。
【図14】アプリケーションの要求に基づいてフロントステア制御によって車両横方向運動制御が実行されているときに、フロントステアのアベイラビリティが低下する場合を示した模式図である。
【発明を実施するための形態】
【0024】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0025】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、本発明の一実施形態にかかる車両横方向運動制御装置(以下、VLPという)が適用された車両横方向運動制御システムを例に挙げて、VLPについて説明する。
【0026】
図1は、本実施形態にかかる車両横方向運動制御システムのブロック図である。本実施形態の車両横方向運動制御システムでは、複数の制御対象、具体的にはフロントステア、リアステアおよびブレーキを制御することにより、車両横方向運動の制御を行う。
【0027】
図1に示されるように、車両横方向運動制御システムは、制御要求部1、センサ部2、目標値生成部3、車両状態監視部4、アベイラビリティ演算部5、フィードフォワード(以下、F/Fという)演算部6、フィードバック(以下、F/Bという)演算部7、最終値演算制御許可判定部8、各種マネージャ9〜11、各種電子制御装置(以下、ECUという)12〜15および横方向運動制御用の各種アクチュエータ(以下、ACTという)16〜19を有している。これらのうちの目標値生成部3、車両状態監視部4、アベイラビリティ演算部5、F/F演算部6、F/B演算部7および最終値演算制御許可判定部8、もしくはこれらに各種マネージャ9〜11を含めたものがVLPに相当する。
【0028】
制御要求部1は、車両横方向運動制御を行う各アプリケーションの制御要求に従って、車両状態に応じた横方向運動に関する要求信号を出力する。本実施形態の場合、制御要求部1は、レーンキープ制御、レーンデパーチャ制御などの各種アプリケーションを実行する各種制御部(図示せず)を備えている。レーンキープ制御では、車両前方画像を取り込んで走行車線の両側の走行線を認識することにより、車両が走行線に沿って走行する際に、両側の走行線の中央付近からずれないように車両横方向運動制御を行う。レーンデパーチャ制御では、車両前方画像を取り込んで走行車線の両側の走行線を認識することにより、車両が走行車線に沿って走行する際に、両側の走行線からはみ出さないようにドライバに対して警報を行うものであるが、同時に両側の走行線からはみ出さないように車両横方向運動制御を行う。また、アプリケーションとしては、車両走行方向に存在する障害物などとの衝突を避けるように車両横方向運動制御を行う緊急回避制御や、駐車時に想定される車両移動経路に導くように車両横方向運動制御を行う駐車支援制御なども想定される。その他、車両横方向運動制御が行われるアプリケーションであれば、どのようなものであっても良い。
【0029】
これら各アプリケーションにおいて車両横方向制御の実行開始条件を満たすと判定されると、車両横方向制御として必要な制御量やアプリケーションの実行を指示する要求信号が出力され、これが車両横方向制御装置に入力される。これにより、車両横方向運動制御を実行するのに用いられる各種ACT16〜19が駆動されることで、各アプリケーションの要求に応じた車両の横方向運動が制御されるようになっている。本実施形態の場合、制御要求部1は、必要な制御量を示す要求信号として要求横加速度Gyおよび要求横加速度変化率dGy/dtを用いており、アプリケーションの実行の有無を指示する要求信号としてアプリ実行要求を用いている。
【0030】
また、制御要求部1では、各アプリケーションの内容に応じた要求モードや制御対象の優先度を表した情報であるアプリ情報をアベイラビリティ演算部5に伝えている。アプリケーションの内容に応じた要求モードは、セーフティ(安全性)、コンフォート(快適性)、エコ(経済性)のいずれを優先させるかを示しており、アプリケーションの内容に応じた制御を選択するための指標とされる。例えば、要求モードがセーフティの場合には応答性良い制御が実現され、コンフォートの場合には低い応答性で過度な負担を乗員にかけないような制御が実現され、エコの場合には最も必要エネルギーが少ない制御が実現されることで、アプリケーションの内容に応じた制御が実現されるようにする。また、制御対象の優先度は、アプリケーションに対応した車両横方向運動制御を行う際に選択されるべき制御対象の優先順位を示している。
【0031】
センサ部2は、各種車両状態を示す情報を車両状態監視部4に対して入力するものである。具体的には、センサ部2は、各種車両状態の検出信号もしくは各種車両状態の演算結果を示すデータ信号などを各種車両状態を示す情報として車両状態監視部4に入力している。本実施形態では、センサ部2から車両状態監視部4に対して、前輪舵角、各輪車軸トルク、後輪舵角、車速(車体速度)に関する情報が伝えられるようにしている。前輪舵角や後輪舵角に関しては、例えば舵角センサの検出信号が用いられる。各輪車軸トルクについては、例えばブレーキECUにおいて現在発生させられている各輪車軸トルクが演算されているためその演算結果が用いられる。車速に関しては、例えば車輪速度センサの検出信号に基づいて演算された各車輪の車輪速度から演算した値が用いられる。
【0032】
また、センサ部2には、車両に実際に発生している実ヨーレートを検出するヨーレートセンサも含まれている。このヨーレートセンサの検出信号もしくはその検出信号に基づいて演算した実ヨーレートが車両状態監視部4を介してF/B演算部7に伝えられている。さらに、センサ部2には、走行路面状態として路面摩擦係数(以下、μという)を検出する部分も含まれている。例えば、ブレーキECUでは車輪速度などに基づいて路面μを検出していることから、それの検出結果が車両状態監視部4に伝えられるようになっている。
【0033】
目標値生成部3は、制御要求部1から入力される要求横加速度Gyおよび要求横加速度変化率dGy/dtに基づいて、各アプリケーションの要求を調停する。そして、各アプリケーションの要求を満たすために必要な制御目標値であるアプリ要求値を出力する。アプリ要求値としては、アプリケーションの内容に応じて変わり、一制御周期内でのヨーレートγの絶対量(以下、ヨーレート絶対量という)やヨーレート変化量dγ/dtであるアプリ要求ヨーレートやアプリ要求変化量をアプリ要求値として出力している。各アプリケーションの要求の調停については、アプリ実行要求に示されるアプリケーションの種類に応じて行っている。例えば、各アプリケーションにて要求される要求横加速度Gyや要求横加速度変化率dGy/dtを加算した総和に対応するヨーレートγやヨーレート変化量dγ/dtをアプリ要求ヨーレートやアプリ要求変化量として出力するようにすれば、すべてのアプリケーションの要求を満たす車両横方向運動制御を行える。また、実装されているアプリケーションに優先順位がある場合には、優先順位が高いアプリケーションにて要求される要求横加速度Gyや要求横加速度変化率dGy/dtに対応するヨーレートγやヨーレート変化量dγ/dtをアプリ要求ヨーレートやアプリ要求変化量として出力する。アプリ実行要求にて、どのアプリケーションを実行するかが示されていることから、このアプリ実行要求に基づいて実行すべき優先順位の高いアプリケーションを選択することができる。
【0034】
なお、本実施形態では、制御要求部1から入力される要求値として要求横加速度Gyや要求横加速度変化率dGy/dtを用い、車両横方向運動制御を実行する際の制御量やその変化量として、アプリ要求ヨーレートやアプリ要求変化量というヨーレート換算した値を用いて説明するが、これらに限るものではない。例えば、制御要求部1から入力される要求値としてヨーレートγおよびヨーレート変化量dγ/dtを用い、車両横方向運動制御を実行する際の制御量として、それを横加速度換算した値を用いるようにしても良い。
【0035】
車両状態監視部4は、センサ部2から入力される各種車両状態を示す情報に基づいて、現在の車両情報を求め、その車両情報をアベイラビリティ演算部5に出力する。具体的には、車両状態監視部4では、車両に対して現在発生している前輪舵角、各輪車軸トルク、後輪舵角および車速に基づいて、一般的な数式より理論的に求められる現在あるべき前輪舵角、各輪車軸トルク、後輪舵角および車速を車両情報として求めている。また、走行路面状態を示す路面μなどの車両走行情報についても、車両情報として取得している。
【0036】
アベイラビリティ演算部5は、各種ACT16〜19を駆動するための各種ECU12〜15より各種ACT16〜19のアベイラビリティをアベイラビリティ物理量変換部20を介して受け取ることにより、各制御対象(フロントステア、リアステアおよびブレーキ)のアベイラビリティに関する情報(アベイラビリティ情報)を取得するアベイラビリティ取得手段を構成する。また、アベイラビリティ演算部5は、取得した各制御対象のアベイラビリティ情報と車両状態監視部4から伝えられる車両情報および制御要求部1から伝えられるアプリ情報に基づいて、VLPとしてのアベイラビリティを演算する。そして、VLPとしてのアベイラビリティに関する情報をF/F演算部6やF/B演算部7に対して伝えている。
【0037】
ここで、アベイラビリティとは、制御可能範囲のことを意味しており、出力できる制御量の最大値(最大制御量)に加えて、制御時の応答性を示す制御量の変化量も含む概念である。車両横方向運動制御においては、車両左旋回方向と右旋回方向の二つのアベイラビリティがある。
【0038】
例えば、各種ACT16〜19のアベイラビリティとは、各種ACT16〜19の最大制御量や、各種ACT16〜19の応答性(制御量の変化量)を意味している。また、各制御対象のアベイラビリティとは、各ACT16〜19のアベイラビリティにて示されるフロントステア、リアステアおよびブレーキそれぞれの最大制御量や応答性(制御量の変化量)を意味している。各種ACT16〜19のアベイラビリティについては、各種ECU12〜15よりそのときの各種ACT16〜19の状態を表したマップ等として、アベイラビリティ物理量変換部20を介してアベイラビリティ演算部5に伝えられる。ACT16〜19のアベイラビリティのうち、フロントステアを制御するためのACT16、17のアベイラビリティの合計がフロントステアのアベイラビリティ(フロントステアアベイラビリティ)となる。また、リアステアを制御するためのACT18のアベイラビリティがリアステアのアベイラビリティ(リアステアアベイラビリティ)となる。同様に、ブレーキを制御するためのACT19のアベイラビリティがブレーキのアベイラビリティ(ブレーキアベイラビリティ)となる。このため、各種ECU12〜15から各種ACT16〜19のアベイラビリティが伝えられることは、各制御対象のアベイラビリティが伝えられることを意味している。したがって、図1中では、各種ECU12〜15からフロントアベイラビリティ、リアアベイラビリティ、ブレーキアベイラビリティがアベイラビリティ物理量変換部20を介してアベイラビリティ演算部5に入力される形で示してある。
【0039】
また、VLPとしてのアベイラビリティとは、各制御対象のアベイラビリティやアプリ情報および車両情報を加味して出力し得る制御可能範囲のことを意味している。このアベイラビリティ演算部5によるVLPとしてのアベイラビリティの演算については、後で詳細に説明する。
【0040】
F/F演算部6は、アプリ要求ヨーレートやアベイラビリティ演算部5から伝えられるアベイラビリティ情報およびアプリ情報に基づいてF/F制御を行うためのF/F要求値を演算する。具体的には、本実施形態のF/F演算部6は、制御対象選択部61、規範演算部62およびF/F要求値演算部63を有した構成とされている。
【0041】
制御対象選択部61は、アプリ要求ヨーレートに加えて、アベイラビリティ演算部5を介して伝えられるアプリ情報やアベイラビリティ情報に基づいて、制御対象選択を行う制御対象選択手段を構成する。具体的には、制御対象選択部61では、各制御対象の中から車両横方向運動制御の実行に用いる制御対象を選択し、選択された制御対象(以下、選択制御対象という)に要求する制御量や応答性(制御量の変化量)の制御目標値を設定する制御対象選択を行う。制御対象選択は、車両横方向運動制御にかかわる制御要求が出されたとき、例えばレーンキープ制御などが実行されたタイミングなどに行われる。この制御対象選択部61の詳細構成や制御対象選択手法の詳細については、後で説明する。
【0042】
規範演算部62は、制御対象選択部61での選択制御対象が決まると、アベイラビリティ演算部5から伝えられたアベイラビリティ情報に基づいて、選択制御対象のアベイラビリティから選択制御対象の規範値を演算する。つまり、制御対象選択部61で選択制御対象が決まると、アプリ要求値を満たすのに必要な各選択制御対象それぞれの制御量や応答性の配分が決まる。例えば、後述する手法によって2つの制御対象が選択された場合、一番初めに選択された第1制御対象についてはアベイラビリティの最大制御量または制御量の最大変化量を発生させ、第2制御対象については第1制御対象で足りなかった制御量を発生させるなど、配分が決められる。このときに決まる制御量や変化量は各選択制御対象の制御目標値、つまりアプリ要求値を各選択制御対象に配分した値であり、実際に実現し得る規範値は異なっている。このため、この規範演算部62にて、予め求めておいた制御対象ごとの制御目標値と規範値との関係を示すデータなどから、制御目標値に対応する規範値を求めている。
【0043】
F/F要求値演算部63は、各選択制御対象の制御目標値と規範演算部62で演算された規範値との差に基づいて、選択制御対象に対するF/F要求値を演算する。F/F要求値の演算手法については、従来よりF/F制御演算手法として知られているどのような手法が用いられていても構わない。これにより、選択制御対象に対する要求ヨーレートF/F値が演算され、これが最終値演算制御許可判定部8およびF/B演算部7に出力される。後述するように、本実施形態では、フロントステア制御やリアステア制御およびブレーキの制御に基づいて、要求ヨーレートを実現する。これらフロントステア制御やリアステア制御およびブレーキの制御によって実現させるヨーレートγのF/F要求値が、それぞれフロントステア要求ヨーレートF/F値、リアステア要求ヨーレートF/F値およびブレーキ要求ヨーレートF/F値として表してある。
【0044】
F/B演算部7は、F/F演算部6にて演算された各選択制御対象の規範値やアベイラビリティ演算部5から伝えられるアベイラビリティ情報およびアプリ情報、さらには実ヨーレートに基づいてF/B制御を行うためのF/B値を演算する。具体的には、本実施形態のF/B演算部7は、要求値演算部71、制御対象選択部72、F/B要求値演算部73を有した構成とされている。
【0045】
要求値演算部71は、F/F演算部6の規範演算部62から取得した選択制御対象の規範値の総和とセンサ部2に備えられたヨーレートセンサで検出された実ヨーレートとの差に基づいて、トータルのF/B要求値を演算する。
【0046】
制御対象選択部72は、F/B要求値やアベイラビリティ演算部5を介して伝えられるアプリ情報やアベイラビリティ情報、さらにはF/F演算部6から伝えられる各F/F要求値(要求ヨーレートF/F値)に基づいて、制御対象選択を行う制御対象選択手段を構成する。具体的には、制御対象選択部72は、各制御対象の中からF/B制御の実行に用いる選択制御対象を選択し、選択制御対象に要求する制御量や応答性(制御量の変化量)の制御目標値を設定する制御対象選択を行う。この制御対象選択部72の機能は、基本的にはF/F演算部6に備えられた制御対象選択部61と同様である。この制御対象選択部72で選択される選択制御対象は、F/F演算部6の制御対象選択部61で選択される選択制御対象と同じであっても良いし、異なっていても良い。
【0047】
F/B要求値演算部73は、F/F演算部6の規範演算部62から取得した選択制御対象の規範値の総和とセンサ部2に備えられたヨーレートセンサで検出された実ヨーレートとの差に基づきF/B要求値を演算し、制御対象選択部72から算出した選択制御対象と制御対象余裕量に基づいて、F/B要求値を分配する。F/B要求値の演算手法については、従来よりF/B制御演算手法として知られているどのような手法が用いられていても構わない。これにより、選択制御対象に対する要求ヨーレートF/B値が演算され、これが最終値演算制御許可判定部8に出力される。ここでは、前輪舵角や後輪舵角およびブレーキの制御によって実現させるヨーレートγのF/B値がそれぞれフロントステア要求ヨーレートF/B値、リアステア要求ヨーレートF/B値およびブレーキ要求ヨーレートF/B値として表してある。
【0048】
最終値演算制御許可判定部8は、F/F演算部6から伝えられるF/F要求値(要求ヨーレートF/F値)とF/B演算部7から伝えられるF/B要求値(要求ヨーレートF/B値)に基づいて、要求ヨーレート最終値を演算すると共に制御許可を出す制御対象を判定している。これにより、フロントステア、リアステア、ブレーキの3つの制御対象の中から制御許可が出されるものが決定される。例えば、要求ヨーレートF/F値や要求ヨーレートF/B値が発生していることを制御許可の判定条件としている。そして、最終値演算制御許可判定部8は、制御許可の判定条件を満たした制御対象に対して、実行要求および要求ヨーレート最終値を出力する。
【0049】
実行要求は、制御許可が判定された制御対象に対して、制御を実行させることを示す指令である。例えば、制御対象がフロントステアであればフロントステア実行要求、リアステアであればリアステア実行要求、ブレーキであればブレーキ実行要求が出される。要求ヨーレート最終値は、各制御対象によって最終的に発生させることを要求するヨーレートγの値である。この値は、制御対象毎に要求ヨーレートF/F値と要求ヨーレートF/B値を足すことにより求められる。すなわち、フロントステア要求ヨーレートF/F値とフロントステア要求ヨーレートF/B値とを足すことによりフロントステア要求ヨーレート最終値を求めている。また、リアステア要求ヨーレートF/F値とリアステア要求ヨーレートF/B値とを足すことによりリアステア要求ヨーレート最終値を求めている。さらに、ブレーキ要求ヨーレートF/F値とブレーキ要求ヨーレートF/B値とを足すことによりブレーキ要求ヨーレート最終値を求めている。そして、このように演算された各要求ヨーレート最終値が各種マネージャ9〜11に対して伝えられている。
【0050】
各種マネージャ9〜11は、最終値演算制御許可判定部8から伝えられる実行要求および要求ヨーレート最終値に基づいて、ヨーレート最終値を各ACT16〜19にて実現すべき要求制御量(要求物理量)に換算し、それを各ECU12〜14に伝える。具体的には、フロントステアを制御対象として車両横方向運動制御を実行する場合には、フロントステア要求ヨーレート最終値に対応する要求前輪操舵角が演算され、これがECU12、13に伝えられる。また、リアステアを制御対象として車両横方向運動制御を実行する場合には、リアステア要求ヨーレート最終値に対応する要求後輪操舵角が演算され、これがECU14に伝えられる。さらに、ブレーキを制御対象として車両横方向運動制御を実行する場合には、ブレーキ要求ヨーレート最終値に対応する要求各輪加算トルクが演算され、これがECU15に伝えられる。
【0051】
このとき、同じ制御対象を異なるACTの駆動によって制御する場合には、マネージャ9〜11にて、いずれのACTを駆動するか、もしくは、どのように制御量を分配するかなどを調停し、調停後の制御量を各ECU12〜15に伝えるようにしている。例えば、本実施形態では、フロントステアについては、後述するようにEPS16やギア比可変スタリングシステム(以下、VGRS(Variable Gear Ratio Steering)という)17にて制御しているため、これらのいずれか一方もしくは双方によってフロントステアを制御することになる。このような場合には、マネージャ9による調停後の要求前輪操舵角をEPS16やVGRS17を制御するための各ECU12、13に伝えるようにしている。
【0052】
各種ECU12〜15は、各制御対象を制御するための制御出力を発生させるものであり、各種マネージャ9〜11から伝えられた要求制御量を実現すべく各種ACT16〜19を制御する。各種ACT16〜19は、EPS−ACT16、VGRS−ACT17、アクティブリアステアリング(以下、ARS(Active Rear Steering)という)−ACT18および横滑り防止制御(以下、ESC(Electronic Stability Control)という)−ACT19で構成されている。これら各種ACT16〜19が各種ECU12〜15にて制御されることにより、EPS−ACT16およびVGRS−ACT17では要求前輪操舵角が実現されるようにフロントステア制御がなされ、ARS−ACT18では要求後輪操舵角が実現されるようにリアステア制御がなされ、ESC−ACT19では要求各輪加算トルクが実現されるようにブレーキ制御がなされる。
【0053】
また、各種ECU12〜15では、その時々の各種ACT16〜19の状態から、各種ACT16〜19のアベイラビリティを把握しているため、このアベイラビリティをアベイラビリティ演算部5に伝えることも行っている。アベイラビリティとしては、EPS−ACT16およびVGRS−ACT17にて制御されるフロントステア(前輪舵角)の制御可能範囲であるフロントステアアベイラビリティ、ARS−ACT18にて制御されるリアステア(後輪舵角)の制御可能範囲であるリアステアアベイラビリティ、および、ESC−ACT19にて制御されるブレーキ(各輪加算トルク)の制御可能範囲であるブレーキアベイラビリティが挙げられる。フロントステアアベイラビリティには、前輪舵角の絶対量に加えて前輪舵角の応答性を示す前輪舵角角速度(前輪舵角変化量)が含まれている。リアステアアベイラビリティには、後輪舵角の絶対量に加えて後輪舵角の応答性を示す後輪舵角角速度(後輪舵角変化量)が含まれている。ブレーキアベイラビリティには、各輪車軸トルクの絶対量に加えてブレーキの応答性を示す各輪車軸トルク変化量が含まれている。
【0054】
以上のような構成により、制御要求部1からの要求信号が入力されると、各種ACT16〜19のアベイラビリティや車両状態に応じたアベイラビリティを演算している。そして、このアベイラビリティに基づいて各種ACT16〜19を制御することで、より最適な車両横方向運動制御を実行するようにしている。
【0055】
続いて、上記したアベイラビリティ物理量変換部20やアベイラビリティ演算部5や制御対象選択部61(72)の詳細について説明する。
【0056】
図2は、アベイラビリティ演算部5およびアベイラビリティ物理量変換部20の詳細構造を示したブロック図である。この図に示されるように、アベイラビリティ演算部5は、制御対象のγアベイラビリティ算出部51、アプリ要求制限部52および車両情報制限部53を有した構成とされている。
【0057】
アベイラビリティ物理量変換部20は、各種ECU12〜15より伝えられるアベイラビリティをヨーレート換算することで、各制御対象が発生させ得る限界としてのアベイラビリティを演算する。
【0058】
このアベイラビリティ物理量変換部20は、フロントアベイラビリティγ換算部20a、リアアベイラビリティγ換算部20b、ブレーキアベイラビリティγ換算部20cを有した構成とされている。
【0059】
フロントアベイラビリティγ換算部20aでは、フロントステアアベイラビリティをヨーレート換算したフロントステア−γアベイラビリティを算出する。リアアベイラビリティγ換算部20bでは、リアステアアベイラビリティをヨーレート換算したリアステア−γアベイラビリティを算出する。ブレーキアベイラビリティγ換算部20cでは、ブレーキアベイラビリティをヨーレート換算したブレーキ−γアベイラビリティを算出する。例えば、フロントステアアベイラビリティの場合、制御量が前輪舵角、制御量の変化量が前輪舵角角速度で表されているため、これらをヨーレート絶対量やヨーレート変化量dγ/dtに換算したものがフロントステア−γアベイラビリティとなる。リアステアアベイラビリティやブレーキアベイラビリティについても同様であり、後輪舵角や後輪舵角角速度もしくは各輪車軸トルクや各輪車軸トルク勾配をヨーレート絶対量やヨーレート変化量dγ/dtに換算したものがリアステア−γアベイラビリティもしくはブレーキ−γアベイラビリティとなる。
【0060】
アベイラビリティ演算部5が有する制御対象のγアベイラビリティ算出部51では、アベイラビリティ物理量変換部20の上記各換算部20a〜20cにて演算されたフロントステア−γアベイラビリティとリアステア−γアベイラビリティおよびブレーキ−γアベイラビリティの和を求めることにより、各制御対象のトータルのアベイラビリティ(制御対象の限界値)のヨーレート換算値である制御対象のγアベイラビリティを算出する。
【0061】
アプリ要求制限部52は、アプリ情報に含まれる要求モードや制御対象の優先度に基づいて、アプリケーションからの要求に応じた制限であるアプリ要求制限を行う。例えば、アプリケーションの要求として、ブレーキを用いたくないという要求が有る場合には、ブレーキ−γアベイラビリティを0にするなどの制限を掛ける。具体的には、アプリ要求制限部52は、フロントステアアプリ要求制限部52a、リアステアアプリ要求制限部52bおよびブレーキアプリ要求制限部52cを有した構成とされている。これら各アプリ要求制限部52a〜52cにより、アベイラビリティ物理量変換部20で演算された各γアベイラビリティに対してアプリ要求制限を行うことにより、フロントステア−γアベイラビリティとリアステア−γアベイラビリティおよびブレーキ−γアベイラビリティのアプリ要求制限を行った値を設定している。
【0062】
車両情報制限部53は、車両情報に含まれる車両走行に関する情報に基づいて、車両情報に応じた制限である車両情報制限を行う。例えば、走行路面が低μ路面である場合には、車輪スリップを回避するためにブレーキの使用を避ける方が好ましい。このため、例えば路面μがしきい値より低い場合には、低μ路面であるとして、ブレーキ−γアベイラビリティを0にするなどの制限を掛ける。具体的には、車両情報制限部53は、フロントステア車両情報制限部53a、リアステア車両情報制限部53b、ブレーキ車両情報制限部53cおよび車両限界値算出部53dとを有した構成とされている。各車両情報制限部53a〜53cにより、各アプリ要求制限部52a〜52cで演算されたアプリ要求制限後のγアベイラビリティに対して更に車両情報制限を行う。これにより、最終的にVLPとして出力し得る各制御対象でのγアベイラビリティ、すなわちフロントステアVLP−γアベイラビリティとリアステアVLP−γアベイラビリティおよびブレーキVLP−γアベイラビリティを設定している。
【0063】
また、車両限界値算出部53dでは、最終的にVLPとして出力し得るトータルのγアベイラビリティを算出している。具体的には、車両限界値算出部53dでは、車両情報制限部53a〜53cにて演算されたフロントステアVLP−γアベイラビリティとリアステアVLP−γアベイラビリティおよびブレーキVLP−γアベイラビリティの和を求めることにより、最終的に出力し得るトータルのVLP−γアベイラビリティ(車両限界値)を算出する。
【0064】
このようにして、アベイラビリティ演算部5では、各制御対象でのACT16〜19が発生させ得る限界を加味した各制御対象のアベイラビリティをアベイラビリティ物理量変換部20を介してヨーレート換算した値を、さらにアプリ要求や車両情報を加味して補正したVLPとしてのアベイラビリティを演算する。そして、VLPとしてのアベイラビリティに関する情報をF/F演算部6やF/B演算部7に対して伝えている。なお、アプリ要求とは、アプリ情報に示されるアプリ要求モードや制御対象の優先度に加えて、アプリ要求値を含むアプリケーションの要求を意味している。
【0065】
次に、制御対象選択部61(71)の詳細について説明する。図3は、制御対象選択部61の詳細構造を示したブロック図である。この図に示されるように、制御対象選択部61は、アベイラビリティ値算出部61a、比較部61b、選択部61c、制御対象選択タイミング判定部61dを有した構成とされている。
【0066】
アベイラビリティ値算出部61aでは、アプリ要求値やアプリ情報およびアベイラビリティ演算部5から伝えられた各アベイラビリティ、すなわちフロントステアVLP−γアベイラビリティとリアステアVLP−γアベイラビリティおよびブレーキVLP−γアベイラビリティから、各制御対象で実現し得るヨーレート絶対量とヨーレート変化量dγ/dtの値を算出する。具体的には、アベイラビリティ演算部5から伝えられた各アベイラビリティが制御量の絶対量およびその変化量を含んでいることから、それらがヨーレート絶対量とヨーレート変化量dγ/dtのマップとして表される。このマップを用いて、アプリ要求値やアプリ情報に対応するヨーレート絶対量とヨーレート変化量dγ/dtの値を算出している。
【0067】
これについて、図4および図5を参照して説明する。図4は、アプリ要求モードがコンフォートの場合の選択パターンについて、アプリ要求ヨーレートをすべての制御対象で実現できる場合と、一部の制御対象でしか実現できない場合について示したものである。図5は、アプリ要求モードがセーフティの場合の選択パターンについて、アプリ要求変化量をすべての制御対象で実現できる場合と、一部の制御対象でしか実現できない場合について示したものである。
【0068】
例えば、アベイラビリティ演算部5から伝えられた各アベイラビリティに基づいて、各制御対象のヨーレート絶対量とヨーレート変化量dγ/dtのマップが図4および図5のように表されたとする。
【0069】
この場合において、アプリ要求モードがコンフォートである場合には、高い応答性よりもむしろ低い応答性で過度な負担を乗員にかけないようにアプリ要求値を実現できるようにしたり、より少ないACT数でそれを実現できるようにするのが好ましい。このため、この場合には、アプリ要求ヨーレートを基準にヨーレート絶対量およびヨーレート変化量dγ/dtを算出する。一方、アプリ要求モードがセーフティである場合には、緊急性を要するため、より高い応答性でアプリ要求値を実現できるようにするのが好ましい。このため、アプリ要求変化量を基準にヨーレート絶対量およびヨーレート変化量dγ/dtを算出する。
【0070】
具体的には、図4(a)に示すように、アプリ要求ヨーレートをすべての制御対象で実現できる場合、つまりアプリ要求ヨーレートがすべての制御対象の最大制御量(アベイラビリティ最大値)より小さい場合には、各制御対象のヨーレート絶対量はすべてアプリ要求ヨーレートになる。そして、ヨーレート変化量dγ/dtについては、各制御対象のマップとアプリ要求ヨーレートとが交差する点となる。すなわち、フロントステアについては、ヨーレート絶対量がアプリ要求ヨーレートとなり、ヨーレート変化量dγ/dtはA点となる。ブレーキについては、ヨーレート絶対量がアプリ要求ヨーレートとなり、ヨーレート変化量dγ/dtはB点となる。リアステアについては、ヨーレート絶対量がアプリ要求ヨーレートとなり、ヨーレート変化量dγ/dtはC点となる。
【0071】
一方、アプリ要求モードがコンフォートであり、かつ、図4(b)に示すように、アプリ要求ヨーレートを一部の制御対象でしか実現できない場合、つまりアプリ要求ヨーレートが一部の制御対象の最大制御量より大きい場合には、各制御対象のヨーレート絶対量やヨーレート変化量dγ/dtは次のようになる。すなわち、アプリ要求ヨーレートよりも制御対象の最大制御量が大きいフロントステアについては、ヨーレート絶対量がアプリ要求ヨーレートとなり、ヨーレート変化量dγ/dtはD点となる。リアステアおよびブレーキについては、ヨーレート絶対量がそれぞれの最大制御量となり、ヨーレート変化量dγ/dtはE、F点(E=F)となる。
【0072】
また、アプリ要求モードがセーフティであり、かつ、図5(a)に示すように、アプリ要求変化量をすべての制御対象で実現できる場合、つまりアプリ要求変化量がすべての制御対象の制御量の最大変化量(アベイラビリティ最大変化量)より小さい場合には、各制御対象のヨーレート変化量dγ/dtはすべてアプリ要求変化量となる。そして、ヨーレート絶対量については、各制御対象のマップとアプリ要求変化量とが交差する点となる。すなわち、フロントステアについては、ヨーレート変化量dγ/dtがアプリ要求変化量となり、ヨーレート絶対量はA点となる。ブレーキについては、ヨーレート変化量dγ/dtがアプリ要求変化量となり、ヨーレート絶対量はB点となる。リアステアについては、ヨーレート変化量dγ/dtがアプリ要求変化量となり、ヨーレート絶対量はC点となる。
【0073】
一方、アプリ要求モードがセーフティであり、かつ、図5(b)に示すように、アプリ要求変化量を一部の制御対象でしか実現できない場合、つまりアプリ要求変化量が一部の制御対象の制御量の最大変化量より大きい場合には、各制御対象のヨーレート絶対量やヨーレート変化量dγ/dtは次のようになる。すなわち、アプリ要求変化量よりも制御対象の制御量の最大変化量が大きいブレーキについては、ヨーレート変化量dγ/dtがアプリ要求変化量となり、ヨーレート絶対量はE点となる。フロントステアおよびリアステアについては、ヨーレート変化量dγ/dtがそれぞれの最大変化量となり、ヨーレート絶対量はD、F点(D=F)となる。
【0074】
比較部61bでは、アプリ要求値、つまりアプリ要求ヨーレートやアプリ要求変化量とアベイラビリティ値算出部61aにて算出された各制御対象で実現し得るヨーレート絶対量やヨーレート変化量dγ/dtの値を比較する。例えば、アプリ要求値よりも各制御対象でのヨーレート絶対量やヨーレート変化量dγ/dtが大きいかの大小比較、つまり各制御対象によってアプリ要求値を達成できるか否かを比較し、どの制御対象が達成でき、どの制御対象が未達であるかを求める。例えば、アプリ要求値としてアプリ要求ヨーレートが5であった場合に、フロントステアやリアステアおよびブレーキのそれぞれのヨーレート絶対量が8、6、3であったとする。この場合には、フロントステアおよびリアステアについては達成となり、ブレーキについては未達となる。また、アプリ要求変化量が3であった場合に、フロントステアやリアステアおよびブレーキのそれぞれのヨーレート絶対量が5、6、7であったとする。この場合には、フロントステアやリアステアおよびブレーキすべてについては達成となる
このような比較を、アプリ要求ヨーレートとアベイラビリティ値算出部61aで算出されたヨーレート絶対値に対して行うと共に、アプリ要求変化量とアベイラビリティ値算出部61aで算出されたヨーレート変化量それぞれに対して行う。
【0075】
選択部61cでは、比較部61bによる比較結果に基づいて制御対象を選択することで、制御対象を制御するための制御対象選択を行う。
【0076】
制御対象選択では、アプリ要求モードに応じたアプリ要求値の実現が可能となるように、どの制御対象を制御するかを選択する。各制御対象の中で最も優先的に選択されるものを第1制御対象として、第1制御対象のみでアプリ要求モードに応じたアプリ要求値の実現が可能でない場合には第2制御対象を選択し、それでも実現が可能でない場合には第3制御対象を選択する。このときの第1〜第3制御対象の選択順序について、アプリ要求モードに応じて変えている。
【0077】
この制御対象選択の考え方について、図6を参照して説明する。図6は、アプリ要求値と第1〜第3制御対象の選択順の一例を示した図であり、図6(a)は、アプリ要求モードがコンフォートの場合、図6(b)は、アプリ要求モードがセーフティの場合を示している。
【0078】
図6(a)、(b)に示すように、アプリ要求ヨーレートに対して規範値が設定され、その規範値を満たすべく、制御対象選択を行う。アプリ要求モードがコンフォートの場合には、高い応答性が必要でないため、図6(a)に示すように、ヨーレート絶対量の大きい順に第1〜第3制御対象を選択する。このようにすれば、よりヨーレート絶対量の大きいものから順番に車両横方向運動制御に使用する制御対象を選択でき、より少ない制御対象数で車両横方向運動制御が行えるため、制御対象同士の干渉による車両横方向運動の振動発生量を最小限にすることが出来ることから、不必要に制御対象数を多くする場合と比較して快適性を増すことができる。
【0079】
これに対して、アプリ要求モードがセーフティの場合には、高い応答性が必要とされるため、図6(b)に示すように、ヨーレート変化量dγ/dtが大きい順に第1〜第3制御対象を選択する。このようにすることで、快適性よりも安全性を重視して、より応答性の高い車両横方向運動制御が行えるようにすることが可能となる。ただし、ヨーレート変化量dγ/dtが大きかったとしても、その制御対象のヨーレート絶対量が小さいと緊急性に対応できないため、例えばヨーレート絶対量がアプリ要求ヨーレートの所定割合以下である場合には、選択順序を下げるようにすることもできる。
【0080】
このような考え方に基づく制御対象選択の一例について、図7(a)〜(c)および図8(a)〜(c)に示すマップを参照して説明する。
【0081】
図7(a)〜(c)は、アプリ要求モードがコンフォートである場合の制御対象選択用のマップであり、図8(a)〜(c)は、アプリ要求モードがセーフティである場合の制御対象選択用のマップである。図7(a)および図8(a)は、各制御対象の中で最も優先的に選択される第1制御対象の選択用マップであり、図7(b)、(c)および図8(b)、(c)は、第1制御対象が選択された後に、二番目、三番目に優先的に選択される第2、第3制御対象選択用マップである。
【0082】
まず、図7(a)のマップを用いて、アプリ要求ヨーレートを満たしているか否かの比較結果について選択する。例えば、上記した例で言えば、「5:リアステアとフロントステアが達成」という項目が選択される。続いて、図7(a)のマップから、アプリ要求変化量を満たしているか否かの比較結果について選択する。上記した例でいれば、「7:すべて達成」という項目が選択される。そして、これら各項目の縦方向の欄と横方向の欄の交差する欄である「6:フロントステアとリアステアの最大値選択」が選択される。この場合には、フロントステアとリアステアのうちヨーレート絶対量が最大のものが第1制御対象として選択されることになる。
【0083】
次に、図7(b)のマップを用いて、アプリ要求ヨーレートを満たしているか否かの比較結果について選択する。例えば、上記した例で言えば、「5:フロントステアとリアステアが達成」という項目が選択される。続いて、図7(b)のマップから、アプリ要求変化量を満たしているか否かの比較結果について選択する。上記した例でいれば、「7:すべて達成、※第1は勾配が最大の制御対象」という項目が選択される。そして、これら各項目の縦方向の欄と横方向の欄の交差する欄である「第2選択なし」が選択される。この場合には、第2制御対象の選択はないこととなる。
【0084】
更に、図7(c)のマップを用いて、アプリ要求ヨーレートを満たしているか否かの比較結果について選択する。例えば、上記した例で言えば、「5:フロントステアとリアステアが達成」という項目が選択される。続いて、図7(c)のマップから、アプリ要求変化量を満たしているか否かの比較結果について選択する。上記した例でいえば、「7:すべて達成」という項目が選択される。そして、これら各項目の縦方向の欄と横方向の欄の交差する欄である「第2選択なし」が選択される。この場合には、第3制御対象の選択もないこととなる。
【0085】
また、ここでは要求モードがコンフォートの場合の第1〜第3制御対象の選択手法について説明したが、要求モードがセーフティの場合の第1〜第3制御対象の選択手法についても、図7(a)〜(c)に代えて図8(a)〜(c)のマップを用いること以外は同様である。
【0086】
なお、図7(a)〜(c)に示すマップでは、基本的に、ヨーレート絶対量が大きい制御対象から順に選択されるようにし、常時すべての制御対象を選択するのではなく、必要な制御対象のみが選択されるようにしている。また、アプリ要求ヨーレートもアプリ要求変化量も共に1つの制御対象で達成できるときは、単独の制御対象を選択制御対象としている。また、アプリ要求ヨーレートを2つ以上の制御対象で達成しているときにはヨーレート要求変化量を加味して選択する。さらに、アプリ要求ヨーレートをすべての制御対象で達成していて、かつ、アプリ要求変化量がすべての制御対象で未達の場合には、ヨーレート絶対量が最大のものではなく、ヨーレート変化量dγ/dtが最大の制御対象を選択することで、作動させる制御対象の数をより少なくできるようにしている。
【0087】
一方、図8(a)〜(c)に示すマップでは、基本的に、ヨーレート変化量dγ/dtが大きい制御対象から順に選択されるようにし、常時すべての制御対象を選択するのではなく、必要な制御対象のみが選択されるようにしている。また、アプリ要求ヨーレートもアプリ要求変化量も共に1つの制御対象で達成できるときは、単独の制御対象を選択制御対象としている。また、アプリ要求変化量を2つ以上の制御対象で達成しているときにはヨーレート絶対量を加味して選択する。さらに、アプリ要求変化量をすべての制御対象で達成していて、かつ、アプリ要求ヨーレートがすべての制御対象で未達の場合には、ヨーレート変化量dγ/dtが最大のものではなく、ヨーレート絶対量が最大の制御対象を選択することで、作動させる制御対象の数をより少なくできるようにしている。
【0088】
このようにして、制御対象選択部61による制御対象選択が完了すると、規範演算部62にて、アプリ要求ヨーレートおよび選択制御対象のアベイラビリティから選択制御対象の規範値を演算したり、F/F要求値演算部63にて、F/F要求値が演算される。これに基づいて、F/F演算部6や最終値演算制御許可判定部8および各種マネージャ9〜11が上記のような動作を行い、各種マネージャ9〜11から各種ECU12〜15に対して要求制御量が伝えられ、各種ECU12〜15が各ACT16〜19を駆動することで、アプリケーションの要求に応じた車両横方向運動を実現することが可能となる。
【0089】
制御対象選択タイミング判定部61dは、制御対象を選択するときの優先順位決定条件となるアプリ要求や車両情報およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティに基づいて、上記手法による制御対象の選択タイミングを判定する。具体的には、最初の制御対象の選択は、アプリ要求が出されたとき(車両横方向運動制御にかかわる制御要求が出されたとき)、例えばレーンキープ制御やレーンデパーチャ制御などが実行されたタイミングで行われる。しかしながら、制御対象を選択するときの優先順位を決定する優先順位決定条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティの変化等によっては、制御対象優先度を再考する必要がある。このため、制御対象選択タイミング判定部61dでは、車両横方向運動制御にかかわる制御要求が出されたときに制御対象の選択タイミングと判定したのちにも、アプリ情報や車両状態監視部4からの車両情報を取得すると共にアベイラビリティ演算部5での演算結果を取得し、これらの情報に基づいて選択制御対象の再考を行う。
【0090】
図9は、制御対象選択タイミング判定部61dの詳細構造を示したブロック図である。この図に示すように、制御対象選択タイミング判定部61dは、アプリ要求変化による第1選択タイミング判定部61da、車両情報変化による第2選択タイミング判定部61db、アベイラビリティ変化による第3選択タイミング判定部61dcおよび選択タイミング指示部61ddを有した構成とされている。
【0091】
アプリ要求変化による第1選択タイミング判定部61daでは、アプリ情報に示されるアプリ要求モードの内容変更などに基づいて、制御対象選択タイミングであることを判定する。アプリ情報の変更としては、例えばコンフォートからセーフティへの変更などのように、アプリ要求モードが変更された場合が挙げられる。これについて、図10に、アプリ要求モードがコンフォートからセーフティへ変更されたときの車両挙動とアベイラビリティの変化を表した模式図を示し、この図を参照して説明する。
【0092】
レーンキープ制御が実行されると、レーンキープ制御中には快適性が重視されるため、制御対象選択部61より選択される制御対象としてアベイラビリティの最大値が小さいブレーキよりもアベイラビリティの最大値が大きいフロントステア(もしくはリアステア)が優先的に選択される。しかしながら、車両が走行車線の両側の走行線を越えそうになって、レーンデパーチャ制御に切り替わると、それに伴ってアプリ要求モードがコンフォートからセーフティに切り替わる。このため、制御対象選択タイミング判定部61dでは、アプリ要求モードを監視しておき、これが切り替わった時には選択タイミングであると判定して、制御対象選択部61の各部に対して制御対象選択を行わせる旨を示す信号を出力する。これに基づいて、制御対象選択部61では、上記手法による制御対象選択を再び行うことで、選択制御対象を再考し、切り替わったアプリ要求モードに伴った制御対象を改めて選択することが可能となる。ここでは、アベイラビリティの応答性の良いブレーキが優先的に選択される。
【0093】
また、図10中に示したように、レーンデパーチャ制御が終了して再びレーンキープ制御に切り替わると、再びアプリ要求モードの切替えに伴った制御対象選択を行わせる旨の信号が出力される。これにより、また選択制御対象が再考され、再びレーンキープ制御に適した制御対象が選択されることとなる。
【0094】
このように、アプリ要求が変化したとき、例えばアプリ要求モードとして快適性重視のコンフォートモードと応答性重視のセーフティモードが有る場合においてその要求モードが変化したときを選択タイミングとし、このタイミングで選択制御対象を再考させている。これにより、アプリ要求に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0095】
車両情報変化による第2選択タイミング判定部61dbでは、車両情報として示される車両状態などの変化に基づいて、制御対象選択タイミングであることを判定する。車両状態の変化としては、例えば車両が減速した場合などが挙げられる。これについて、図11に、レーンキープ制御中の選択制御対象がフロントステアである場合において車両が減速したときの車両挙動とアベイラビリティの変化を表した模式図を示し、この図を参照して説明する。
【0096】
例えば、レーンキープ制御中に車両が減速した場合には、他の制御対象と比較してアベイラビリティの最大値が小さい場合でもブレーキが優先的に制御対象として選択されるようにした方がエネルギーの損失が少ない。すなわち、下り坂や速度超過でのコーナー進入時などで減速しながら旋回しなければならない際には、フロントステアもしくはリアステア制御を優先するよりもブレーキ制御が優先されるようにすると、ブレーキ発生モーメントによる旋回が可能となるため、高い減速性能を得つつ、高い旋回性能が得られる。そして、制動に使用されるエネルギーをフロントステアもしくはリアステア制御用に分配して旋回することができるため、旋回に必要とされるエネルギーを低減することが可能となり、エネルギーの損失を少なくすることができる。
【0097】
このように、例えばレーンキープ制御において下り坂や速度超過でのコーナ侵入時など、車両が減速されるような車両状態が変化するときを選択タイミングとし、そのタイミングで制御対象を再考させるようにすることもできる。
【0098】
また、第2選択タイミング判定部61dbには、切替予測検出機能も備えられており、車両状態の変化に伴う制御対象の切り替え予測を行うこともできる。図12は、アプリケーションの要求に基づいてブレーキ制御によって車両横方向運動制御が実行されているときに、低μ路が検出された場合を示した模式図である。
【0099】
車両状態が変化した場合、現在の選択制御対象をそのまま維持すると好ましく無い場合、もしくはアプリ要求値を満たさなくなる場合がある。このような場合には、一旦選択された制御対象をそのまま維持するのではなく、他の制御対象に切替えた方がアプリ要求値を満たす上で好ましい。このため、車両状態に基づいて選択制御対象の切り替えを行うべきである状況を予測し、それを予測したタイミングを選択制御対象切替タイミングとして選択制御対象を再考させるようにする。
【0100】
例えば、図12の例のように、ブレーキ制御により車両横方向運動制御が実行されている場合において、車両情報として前輪のスリップなどに基づいて走行路面が低μ路であることが検出されたときには、後輪側でブレーキを用いると後輪スリップが発生する可能性がある。このような場合には、制御対象をブレーキとするのではなく、リアステアに切替えた方が車両安定化を図るために好ましい。このように、走行路面が低μ路であることが検出された場合などを選択制御対象切替タイミングとし、このタイミングで選択制御対象を再考させることで、車両情報に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0101】
このように、車両情報に表される車両状態が変化したとき、例えば下り坂で車両が減速した場合を選択タイミングとし、このタイミングで選択制御対象を再考させている。これにより、車両情報に基づいて、より適切な制御対象が選択されるようにすることが可能となる。また、車両情報に表される車両状態の変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択対象切替予測タイミングとして選択制御対象を再考させている。これによっても、車両情報に基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0102】
アベイラビリティ変化による第3選択タイミング判定部61dcでは、アベイラビリティ演算部5から伝えられるアベイラビリティの変化に基づいて、制御対象選択タイミングであることを判定する。アベイラビリティの変化としては、例えばACT16〜19の機能の変化などが挙げられる。これについて、図13に、フロントステアを制御するためのACT16、17がフェールにより駆動できなくなったときの車両挙動とアベイラビリティの変化を表した模式図を示し、この図を参照して説明する。
【0103】
例えば、アプリケーションの要求に基づいて車両横方向運動制御が実行されているときに、その車両横方向運動制御を実行するために用いている制御対象がフェールすると、その制御対象を用いた車両横方向運動制御が行えなくなる。このため、制御対象選択タイミング判定部61dでは、アベイラビリティ演算部5で演算された各アベイラビリティを監視しておき、任意のアベイラビリティが急変したとき、例えば単位時間当たりのアベイラビリティの変化量が所定の閾値を超えている場合に選択タイミングであると判定して、制御対象選択部61に対して制御対象選択を行わせる旨を示す信号を出力する。これに基づいて、制御対象選択部61では、上記手法による制御対象選択を再び行うことで、選択制御対象を再考し、切り替わったアベイラビリティの変化に伴った制御対象を改めて選択することが可能となる。例えば、図13の例の場合のように、フロントステアのフェールによりフロントステアのアベイラビリティが急変したときには、それに伴って制御対象が改めて選択され、フェールしていないリアステアによって車両横方向運動制御が行われるようになる。このように、アベイラビリティの変化に伴って制御対象を再考させることができる。
【0104】
なお、ここでは、フロントステアのフェール時にリアステアが選択制御対象なる場合について説明したが、リアステア制御による最大制御量がアプリ要求値に満たなければ、リアステアおよびフロントステア以外の制御対象として、ブレーキが選択制御対象となり、アプリ要求値を満たす車両横方向制御が実行されることになる。
【0105】
また、第3選択タイミング判定部61dcには、切替予測検出機能も備えられており、アベイラビリティの変化に伴う制御対象の切り替え予測を行うこともできる。図14は、アプリケーションの要求に基づいてフロントステア制御によって車両横方向運動制御が実行されているときに、フロントステアのアベイラビリティが低下する場合を示した模式図である。
【0106】
アベイラビリティの変化により、選択制御対象のアベイラビリティが低下してアプリ要求値を満たさない状態となることがある。このような場合には、一旦選択された制御対象をそのまま維持するのではなく、アベイラビリティの低下に伴って他の制御対象に切替えた方がアプリ要求値を満たす上で好ましい。このため、アベイラビリティの変化に基づいて選択制御対象の切り替えを行うべきである状況を予測し、それを予測したタイミングを選択制御対象切替タイミングとして選択制御対象を再考させるようにする。
【0107】
例えば、図14の例のようにフロントステアのアベイラビリティが低下する代わりにブレーキのアベイラビリティが上昇するような場合には、以下の2つの条件が成り立つ時に選択対象切替予測タイミングであると判定することができる。
【0108】
(1)ブレーキアVLP−γベイラビリティ≧フロントステアVLP−γアベイラビリティ×余裕度
(2)アプリ要求値>フロントステアVLP−γアベイラビリティ(n)−フロントステアVLP−γベイラビリティ(n−1)×所定時間
なお、条件(2)における所定時間とは、ブレーキの無駄時間と応答性を考慮した値であり、例えば200ms程度と想定される。条件(1)における余裕度は、ブレーキアベイラビリティの制御余裕度であり、アプリ要求に対応できるマージンをもたせる値であり、例えば120%程度と想定される。
【0109】
条件(1)、(2)は、制御対象の再考の回数をできるだけ少なくしつつ、フロントステア制御でアプリ要求値を実現できなくなる状況を的確に判定できるように設定されている。すなわち、図中の点Tで示しているのは、フロントステアVLP−γアベイラビリティの低下に伴ってアプリ要求値を下回り、満たせなくなるタイミングからブレーキ制御の応答性に基づき、ブレーキ制御が立ち上がるまでの時間を考慮したタイミングである。このフロントステアに対する要求値(要求ヨーレート最終値)を低下させ、フロントステア制御の不足分をブレーキ制御によって補わなければならない。つまり、条件(2)の右辺がアプリ要求値を下回る状況になれば、ブレーキ制御による制御量が立ち上がっても、アプリ要求値を満たさなくなる期間が発生し得るため、この条件を選択対象切替予測タイミングとしている。
【0110】
ただし、このような条件(2)を満たしたとしても、フロントステアVLP−γアベイラビリティよりもブレーキVLP−γアベイラビリティが大きくなければ、制御対象選択によって制御対象がフロントステアからブレーキに切り替わらない。このため、条件(1)を付けることにより、制御対象の再考の回数ができるだけ少なくなるようにしている。
【0111】
このように、アベイラビリティが変化したとき、例えば制御対象にフェールが発生した場合を選択タイミングとし、このタイミングで選択制御対象を再考させている。これにより、アベイラビリティに基づいて、より適切な制御対象が選択されるようにすることが可能となる。また、アベイラビリティの変化に基づいて選択する制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを選択対象切替予測タイミングとして選択制御対象を再考させている。これによっても、アベイラビリティに基づいて、より適切な制御対象が選択されるようにすることが可能となる。
【0112】
選択タイミング指示部61ddは、第1〜第3選択タイミング判定部61da〜61dcの少なくとも1つで選択タイミングであると判定されたときに、その判定結果に基づいて、制御対象判定タイミングであることを示す信号を出力する。この信号をトリガーとして、制御対象選択部61の他の構成、つまりアベイラビリティ値算出部61aや比較部61bおよび選択部61cが上述した各演算などを行うことで、制御対象選択を実行する。
【0113】
このようにして、各制御対象を制御するためのACT16〜19の機能的なアベイラビリティ(制御量およびその変化量)を加味してACT16〜19のいずれを用いて、どのように制御量を発生させるかを最適に選択することが可能となる。
【0114】
以上説明したように、本実施形態にかかるVLPでは、異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う。この車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をVLP、より詳しくはVLPのF/F演算部6やF/B演算部7に伝え、アベイラビリティに基づいて車両横方向運動制御に使用する制御対象の優先順位を決定し、その優先順位に基づいて選択制御対象を設定している。
【0115】
このように、各制御対象のアベイラビリティを加味して車両横方向運動制御に使用する制御対象の優先順位を決定して選択制御対象を設定しているため、制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
【0116】
また、アプリケーションからのコンフォートやセーフティ等の要求モードに基づいて、横方向運動制御に使用する制御対象の優先順位を決定して選択制御対象を設定している。このため、応答性を考慮せずに快適性を重視する場合や緊急性に対応して応答性を重視する場合など、状況ごとに適した優先順位で選択制御対象を設定することができる。
【0117】
そして、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定している。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させるようにしている。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
【0118】
(他の実施形態)
上記実施形態では、車両運動制御の一例として車両横方向運動制御を行うVLPについて説明したが、車両前後方向運動制御や車両ロール方向運動制御などを行う車両運動制御装置についても、本発明を適用することができる。
【0119】
すなわち、複数の制御対象を備え、それら複数の制御対象それぞれによって同じ方向の車両運動制御を行うことができる車両運動制御システムの制御を行う車両運動制御装置について、本発明を適用することができる。この場合であっても、各制御対象のアベイラビリティを車両運動制御装置に伝え、車両運動制御装置にて伝えられたアベイラビリティを加味して車両運動制御に使用する制御対象の優先順位を設定することで、制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
【0120】
例えば、車両前後方向運動制御であれば制御対象としてブレーキや駆動力(エンジン出力もしくはモータ出力)などを挙げられ、車両ロール方向運動制御であれば制御対象としてサスペンションやアクティブスタビライザーなどが挙げられる。また、車両横方向運動制御についても、各制御対象を制御するためのACT例を挙げたが、他のACTを使用しても良い。例えば、上記実施形態ではブレーキ制御をESC−ACT19にて行ったが、駐車ブレーキを用いても良いし、インホイールモータなどの各輪車軸トルクを制御するものとして駆動力を制御するようにしても良い。
【0121】
なお、上記実施形態では、優先順位決定条件が変化して選択制御対象を再考させる場合の一例を示したが、優先順位決定条件が上記とは異なった変化を示した場合であっても、勿論、選択制御対象を再考させるようにできる。このようにしても、上記実施形態と同様の効果を得ることができる。
【0122】
また、上記実施形態では、アプリケーションの内容に応じた要求モードに基づいて、車両運動制御を行う緊急度を判定するようにしているが、緊急度を数値などによって示し、その数値が閾値以上であるか否かに基づいて、緊急度が高いか否かを判定するようにしても良い。そして、緊急度が高い場合には、制御対象選択の際に制御量の変化量が大きいものを優先して選択するようにし、緊急度が高くない場合には、制御対象選択の際に最大制御量が大きいものを優先して選択するようにすることができる。
【符号の説明】
【0123】
1…制御要求部、2…センサ部、3…目標値生成部、4…車両状態監視部、5…アベイラビリティ演算部、6…F/F演算部、7…F/B演算部、8…最終値演算制御許可判定部、9〜11…マネージャ、12〜14…ECU、16〜19…ACT、20…アベイラビリティ物理量変換部、51…制御対象のγアベイラビリティ算出部、52…アプリ要求制限部、53…車両情報制限部、61…制御対象選択部、61d…制御対象選択タイミング判定部、61da〜61dc…第1〜第3選択タイミング判定部、61dd…選択タイミング指示部、62…規範演算部、63…F/F要求値演算部、71…要求値演算部、72…制御対象選択部、73…F/B要求値演算部
【特許請求の範囲】
【請求項1】
要求制御量に対して、複数の制御対象(12〜19)を制御することにより、該複数の制御対象(12〜19)によって同じ方向の車両運動制御を行うことで、前記要求制御量を実現する車両運動制御装置であって、
前記複数の制御対象(12〜19)の中から前記車両運動制御を行うために使用する制御対象の優先順位を優先順位決定条件に基づいて決定することで制御対象を選択する制御対象選択手段(61、72)を有し、
前記制御対象選択手段(61、72)は、前記優先順位決定条件の変化を検出し、該優先順位決定条件の変化を検出したことを選択タイミングとして、前記制御対象の選択を再度行わせる制御対象選択タイミング判定部(61d)を備えていることを特徴とする車両運動制御装置。
【請求項2】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記複数の制御対象(12〜19)それぞれの最大制御量および制御量の変化量を含む制御可能範囲に相当するアベイラビリティ、車両状態を示す車両情報、車両運動制御を実行するアプリケーションからの要求の少なくとも1つを用いることを特徴とする請求項1に記載の車両運動制御装置。
【請求項3】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記アベイラビリティを含み、
前記制御対象選択タイミング判定部(61d)では、前記単位時間当たりのアベイラビリティの変化量が閾値を超えたときを前記選択タイミングとすることを特徴とする請求項2に記載の車両運動制御装置。
【請求項4】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記アベイラビリティを含み、
前記制御対象選択タイミング判定部(61d)は、前記アベイラビリティの変化に基づいて選択する前記制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを前記選択タイミングとすることを特徴とする請求項2または3に記載の車両運動制御装置。
【請求項5】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記車両情報を含み、
前記制御対象選択タイミング判定部(61d)では、前記車両情報に表される車両状態が変化したときを前記選択タイミングとすることを特徴とする請求項2ないし4のいずれか1つに記載の車両運動制御装置。
【請求項6】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記車両情報を含み、
前記制御対象選択タイミング判定部(61d)は、前記車両情報に表される車両状態の変化に基づいて選択する前記制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを前記選択タイミングとすることを特徴とする請求項2ないし5のいずれか1つに記載の車両運動制御装置。
【請求項7】
前記制御対象選択タイミング判定部(61d)では、前記車両情報に表される車両状態として、走行路面状態が変化したときを前記選択タイミングとすることを特徴とする請求項6に記載の車両運動制御装置。
【請求項8】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記アプリケーションからの要求を含み、
前記制御対象選択タイミング判定部(61d)では、前記アプリケーションからの要求として少なくとも快適性重視の車両運動制御を行うコンフォートモードか安全性重視の車両運動制御を行うセーフティモードかの要求モードを取得し、該要求モードが変化したときを前記選択タイミングとすることを特徴とする請求項2ないし7のいずれか1つに記載の車両運動制御装置。
【請求項1】
要求制御量に対して、複数の制御対象(12〜19)を制御することにより、該複数の制御対象(12〜19)によって同じ方向の車両運動制御を行うことで、前記要求制御量を実現する車両運動制御装置であって、
前記複数の制御対象(12〜19)の中から前記車両運動制御を行うために使用する制御対象の優先順位を優先順位決定条件に基づいて決定することで制御対象を選択する制御対象選択手段(61、72)を有し、
前記制御対象選択手段(61、72)は、前記優先順位決定条件の変化を検出し、該優先順位決定条件の変化を検出したことを選択タイミングとして、前記制御対象の選択を再度行わせる制御対象選択タイミング判定部(61d)を備えていることを特徴とする車両運動制御装置。
【請求項2】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記複数の制御対象(12〜19)それぞれの最大制御量および制御量の変化量を含む制御可能範囲に相当するアベイラビリティ、車両状態を示す車両情報、車両運動制御を実行するアプリケーションからの要求の少なくとも1つを用いることを特徴とする請求項1に記載の車両運動制御装置。
【請求項3】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記アベイラビリティを含み、
前記制御対象選択タイミング判定部(61d)では、前記単位時間当たりのアベイラビリティの変化量が閾値を超えたときを前記選択タイミングとすることを特徴とする請求項2に記載の車両運動制御装置。
【請求項4】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記アベイラビリティを含み、
前記制御対象選択タイミング判定部(61d)は、前記アベイラビリティの変化に基づいて選択する前記制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを前記選択タイミングとすることを特徴とする請求項2または3に記載の車両運動制御装置。
【請求項5】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記車両情報を含み、
前記制御対象選択タイミング判定部(61d)では、前記車両情報に表される車両状態が変化したときを前記選択タイミングとすることを特徴とする請求項2ないし4のいずれか1つに記載の車両運動制御装置。
【請求項6】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記車両情報を含み、
前記制御対象選択タイミング判定部(61d)は、前記車両情報に表される車両状態の変化に基づいて選択する前記制御対象の切り替えを行うべき状況を予測し、当該状況を予測したときを前記選択タイミングとすることを特徴とする請求項2ないし5のいずれか1つに記載の車両運動制御装置。
【請求項7】
前記制御対象選択タイミング判定部(61d)では、前記車両情報に表される車両状態として、走行路面状態が変化したときを前記選択タイミングとすることを特徴とする請求項6に記載の車両運動制御装置。
【請求項8】
前記制御対象選択手段(61、72)は、前記優先順位決定条件として、前記アプリケーションからの要求を含み、
前記制御対象選択タイミング判定部(61d)では、前記アプリケーションからの要求として少なくとも快適性重視の車両運動制御を行うコンフォートモードか安全性重視の車両運動制御を行うセーフティモードかの要求モードを取得し、該要求モードが変化したときを前記選択タイミングとすることを特徴とする請求項2ないし7のいずれか1つに記載の車両運動制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7(a)】
【図7(b)】
【図7(c)】
【図8(a)】
【図8(b)】
【図8(c)】
【図9】
【図10】
【図11】
【図12】
【図13】

【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7(a)】
【図7(b)】
【図7(c)】
【図8(a)】
【図8(b)】
【図8(c)】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−96623(P2012−96623A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−244549(P2010−244549)
【出願日】平成22年10月29日(2010.10.29)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年10月29日(2010.10.29)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]