
車両運転支援システムおよび車両運転支援方法
【課題】走行する徐行区間の道路幅の広狭、見通しの善し悪し、土手や崖の有無等、個々の徐行区間毎の道路状況や周囲環境を考慮することで、その徐行区間の実走行の際に適正な速度で走行できるようにする。
【解決手段】徐行区間に進入する前に当該徐行区間における道路環境情報を取得する環境情報取得部13と、環境情報取得部13からの道路環境情報をもとに該当する徐行区間の道路環境に応じた最適な区間内通過速度を演算する区間内通過速度演算部15とを備えていて、該当する徐行区間の実走行時に区間内通過速度演算部15にて求めた最適な区間内通過速度となるように車速を制御する。
【解決手段】徐行区間に進入する前に当該徐行区間における道路環境情報を取得する環境情報取得部13と、環境情報取得部13からの道路環境情報をもとに該当する徐行区間の道路環境に応じた最適な区間内通過速度を演算する区間内通過速度演算部15とを備えていて、該当する徐行区間の実走行時に区間内通過速度演算部15にて求めた最適な区間内通過速度となるように車速を制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載されるナビゲーションシステムを活用した車両運転支援システムおよび車両運転支援方法に関し、特に地図データに格納または記録されている徐行区間に自車が進入する前に、その徐行区間のものとして予め設定されている徐行速度まで減速制御を行うようにした車両運転支援システムおよび車両運転支援方法に関するものである。
【背景技術】
【0002】
ナビゲーションシステムの地図データと自車位置情報とに基づいて実行される運転支援アプリケーションの一つとして制限速度に応じた減速制御が知られている。これは、地図データと自車位置情報とに基づいて自車位置の制限速度情報を読み出した上で現車速と照合し、制限速度を超えている場合には可視表示または音声ガイダンスをもって警報を発するシステム(例えば、特開平9−73600号公報)をさらに発展させものと理解することができる。すなわち、例えば特許文献1に記載されているように、自車両が地図データ上の一時停止地点で一時停止するように、所定距離だけ手前位置からその一時停止地点の接近を告知し、併せて余裕をもって車両の減速制御を行うようにしたものである。
【特許文献1】特開平10−76922号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1に代表されるような従来のシステムを別の運転支援アプリケーションの一つである徐行区間前減速制御に適用した場合、自車両が徐行区間に進入する前に予め定められた一律の速度(徐行区間制限速度)まで減速するにすぎず、場合によっては徐行区間に進入した以降に減速の過不足が発生する可能性がある。
【0004】
例えば、自車両が通過すべき徐行区間の位置データは地図データとともに予め格納または記録されてはいても、個々の徐行区間によって道路幅の広狭、見通しの善し悪し、土手や崖の有無等、徐行区間毎の道路状況や周囲環境が異なるため、上記のように一律に所定の徐行区間速制限度まで減速しただけでは、当該徐行区間を実走行する際の車速が速すぎたりあるいは遅すぎる等の減速の過不足が発生する可能性があり、なおも改善の余地を残している。
【0005】
本発明はこのような課題に着目してなされたもので、運転支援アプリケーションの一つである徐行区間前減速制御を行うことを前提とした上で、当該徐行区間の道路幅の広狭、見通しの善し悪し、土手や崖の有無等、個々の徐行区間毎の道路状況や周囲環境を考慮することで、その徐行区間の実走行の際に減速の過不足が生ずることなく、適正な速度で走行できるように考慮されたた車両運転支援システム等を提供するものである。
【課題を解決するための手段】
【0006】
本発明は、予め記憶された地図データと自車位置情報とに基づいて、その地図データに格納されている徐行区間への進入前に当該徐行区間の設定徐行速度まで減速制御を行うことを前提とした上で、徐行区間に進入する前に当該徐行区間における道路環境情報を取得する環境情報取得手段と、前記環境情報取得手段からの道路環境情報をもとに該当する徐行区間の道路環境に応じた最適な区間内通過速度を演算する最適速度演算手段とを備えていて、該当する徐行区間の実走行時に前記最適速度演算手段にて求めた区間内通過速度となるように車速を制御するようにした。
【0007】
環境情報取得手段によって取得される道路環境情報とは、先に述べたように個々の徐行区間によって異なる道路幅の広狭、見通しの善し悪し、土手や崖の有無等に代表されるような徐行区間の周囲の環境情報である。
【発明の効果】
【0008】
本発明によれば、徐行区間への進入前に当該徐行区間の設定徐行速度まで単に減速制御を行うだけでなく、徐行区間の実走行時の車速が当該徐行区間における道路幅等の周囲の環境が反映された最適な区内間通過速度となるようにしたので、その徐行区間を走行する際の車速が速すぎたりあるいは遅すぎることがなくなり、個々の徐行区間の道路状況に見合った適切な速度で走行できるようになり、安全性の向上に寄与できる。
【発明を実施するための最良の形態】
【0009】
図1以下の図面は本発明に係る車両運転支援システムのより具体的な実施の形態を示し、特に図1はそのシステム構成の概略を示している。
【0010】
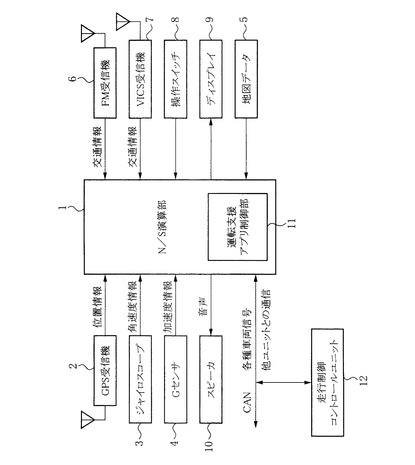
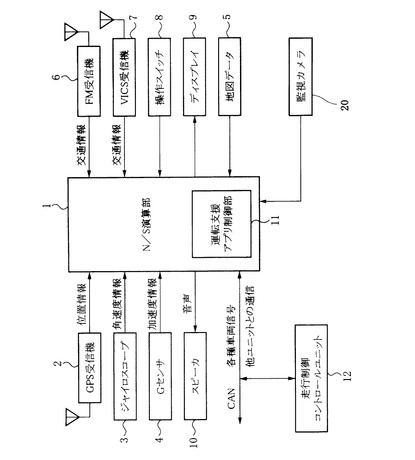
図1のシステムは、周知のカーナビゲーションシステムと車両制御とを連携させたシステムとして車両に搭載されるもので、マイクロコンピュータを主体とするナビゲーションシステム演算部(以下、「N/S演算部」と略称する。)1を中心として構成される。
【0011】
N/S演算部1にはGPS受信機2、ジャイロスコープ3およびG(加速度)センサ4が付帯していて、それぞれの信号がN/S演算部1に入力されるほか、車速信号を含む各種の車両信号(情報)がCAN(Controller Area Network:車載機器の多重通信ネットワーク)経由にてN/S演算部1に入力される。これらのGPS受信機2、ジャイロスコープ3およびGセンサ4は自車位置を検出(測位)するための基本的なセンサとして機能する。また、N/S演算部1には、CD(Compact Disc)、DVD(Digital Versatile Disc)またはHDD(Hard Disc Drive)等の記録媒体にデータベースとして構築された地図データ(デジタル地図データ)5が付帯していて、道路地図データ等が逐次N/S演算部1に呼び出される。同時に、N/S演算部1には、必要に応じてラジオのFM受信機6やVICS受信機7等の通信機器を介して交通情報等が取り込まれる。
【0012】
そして、N/S演算部1では、上記センサ群からの自車位置検出用の信号に基づいて自車の現在位置(絶対位置)を高精度に算出する一方、その自車の現在位置データおよび地図データ5から得られる道路地図データに基づいて周知のパターンマッチングの手法にてマップマッチング処理を実行することにより、自車が地図上のどの位置に存在しているか、すなわち自車の地図上での相対位置を検出することになる。さらに、先に述べたCAN経由で得られる車速信号等の車両情報と地図データ5をもとに、自車位置から目的地までの経路誘導をするというカーナビゲーションシステムの基本機能が実現される。
【0013】
なお、上記地図データ5には、例えば日本全土の道路地図データのほか、それに付随する施設データ等を含むものである。さらに、上記道路地図データには、道路形状、道路種別、道路距離、道路幅員、道路勾配、道路名のほか、交通規制データ、さらには経路検索用の道路データ(リンクデータ)を含むものである。すなわち、上記道路地図データには、ITS(Intelligent Transport System)情報として、当該道路地図データに関連付けられた一時停止線、交差点、徐行区間、スクールゾーン等の位置情報のほか、道路のカーブにおける曲率情報、および各道路での規制速度情報等が含まれている。特に上記徐行区間については、地図データ上での徐行区間の位置情報に付帯する情報として、道路状況や周囲の環境情報、例えば道路幅の程度または度合い(道幅の大きさの段階的な情報として、狭い、普通、広い等)や、見通しの善し悪し、崖あるいは土手の有無等の情報が含まれている。
【0014】
また、上記N/S演算部1には、ユーザーが各種の操作あるいは指示を行うための操作スイッチ群8のほか、ナビゲーション情報や各種のメッセージあるいはガイダンス情報等を表示するための液晶モニタ等のディスプレイ9、さらには音声案内あるいは各種の警告音の発生のためのスピーカ10等が付帯しているほか、運転支援アプリケーション制御部(以下、「運転支援アプリ制御部」と略称する。)11が付帯している。
【0015】
そして、先にも述べたように、ディスプレイ9の画面に自車周辺の道路地図と共に自車の進行方向を含む現在位置を重ね合わせて表示させるロケータ機能や、ユーザにより指定された目的地までの推奨走行経路を自動的に計算してその経路を案内するルートガイダンス機能等のナビゲーション機能、すなわち地図表示(描画)、ルート探索、ルート案内等のナビゲーション機能が実現されることになる。
【0016】
上記運転支援アプリ制御部11は、自車周辺の地図データを利用した各種の運転支援アプリケーションの実行または制御をN/S演算部1と共に司るものであって、そのソフトウウェアによってそれぞれの運転支援アプリケーションが実行され、同時にその運転支援アプリ制御部11と車両側の走行制御系である走行制御コントロールユニット12との間で必要な情報の授受が行われる。なお、走行制御コントロールユニット12は車両の減速(制動)制御や加速制御を直接司るもので、例えば目標車速演算機能やエンジントルク演算機能のほか、ブレーキ液圧演算機能等を有している。
【0017】
ここでの運転支援アプリケーションとしては、車両側の走行制御コントロールユニット12と協調したブレーキ制御または加速制御であり、例えばITS情報として得られた一時停止線や交差点、徐行区間、スクールゾーン等のそれぞれの位置や距離情報に基づいた該当地点前減速制御や一時停止制御、道路ごとの規制速度情報に基づいたブレーキ制御または加速制御、およびカーブの位置情報や曲率情報に基づいたカーブ前減速制御(ブレーキ制御または加速制御)等のほか、それらに関するガイダンスを想定している。
【0018】
より具体的には、徐行区間前減速制御に関する運転支援アプリケーションとは、自車が通過すると予測される徐行区間までの自車位置からの残距離を車内に設けたディスプレイ9に表示するとともに音声でも告知し、その徐行区間進入前に予め設定された徐行速度まで減速させる自動ブレーキ制御機能をいう。
【0019】
同様に、規制速度制御に関する運転支援アプリケーションとは、法規制された速度を維持するための自動ブレーキ制御または加速制御をいい、徐行区間に関する運転支援アプリケーションも当該規制速度制御に関する運転支援アプリケーションに含まれる。
【0020】
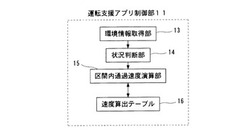
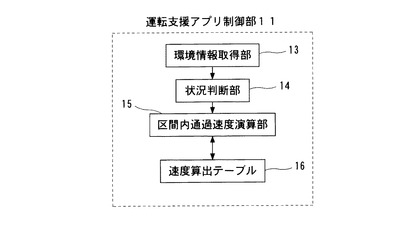
上記運転支援アプリ制御部11は、図2に示すように、環境情報取得部(環境情報取得手段)13のほか、状況判断部14および区間内通過速度演算部(最適速度演算手段)15をそれぞれ備えており、該当する徐行区間の道路状況や周囲の環境情報(道路環境情報)を環境情報取得部13が地図データ5側から受け取ったならば、状況判断部14では予め設定されている徐行速度よりも減速または加速が必要な否かを判断し、減速または加速が必要と判断した場合には、区間内通過速度演算部15では後述するように道幅の広狭や見通しの善し悪し等の状況に応じて該当する徐行区間での最適な区間内通過速度を演算し、先の予め設定されている徐行速度を更新または補正するべく、その演算された区間内通過速度情報を走行制御コントロールユニット12側に出力することになる。
【0021】
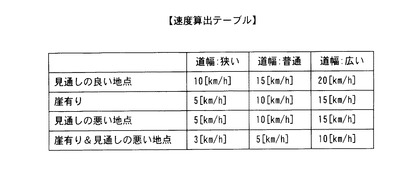
ここでは、区間内通過速度演算部15に図3に示すような速度算出テーブル16が用意されていて、予め設定されている徐行速度よりも減速または加速が必要と状況判断部14で判断した場合には、区間内通過速度演算部15では環境情報取得部13が取得した道路環境情報をもとに図3の速度算出テーブルと照合して、徐行区間の道路環境に見合った最適な区間内通過速度を決定する。例えば図3の例では、該当する徐行区間の道路環境情報として得られたものが「見通しが悪い地点」で且つ「位置幅が狭い」というものであった場合には、徐行区間での最適な区間内通過速度は5km/hということになる。
【0022】
なお、本実施の形態では、該当する徐行区間の道路状況や周囲の環境情報(道路環境情報)として地図データ5に予め記録されているものを環境情報取得部13が受け取るようにしているが、これに限らず他の方式を採用することも可能である。例えば、後述するように環境情報取得部13は車両に搭載された前方監視カメラからの情報を取得するようにしても良い。
【0023】
次に、上記のような徐行区間に関する運転支援アプリケーション(以下、これを「徐行区間アプリ」と略称する。)の実行の手順を、図4以下のフローチャートを参照しながら説明する。なお、この徐行区間に関する運転支援アプリケーションは、先に述べた徐行区間前減速制御に関するアプリケーションとは独立して実行される。
【0024】
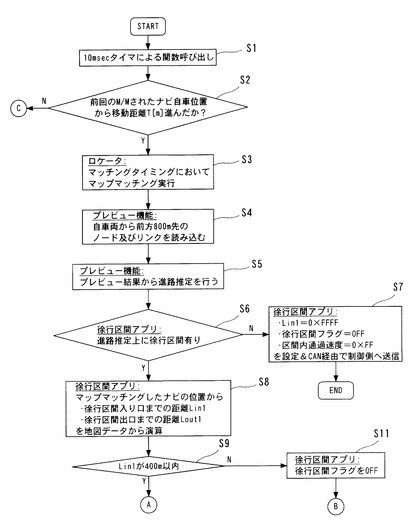
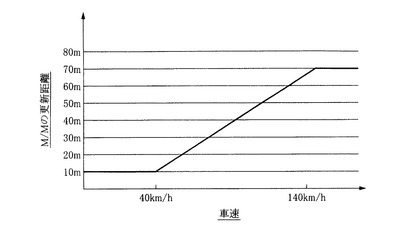
図4に示すように、N/S演算部1では、そのロケータ機能によるマップマッチング処理(図4では、一部「M/M」と記載してある。)を一定周期で実行する。ここでは、10msecタイマにより所定の関数を呼び出した上で(ステップS1)、図9に示すように車速に応じた移動距離ごとにマップマッチング処理を実行する(ステップS2,S3)。自車位置の算出は、前回に算出を行った場所からの移動距離およびその間の進行方向の変化を検出して行う。なお、自車の移動距離は図1に示すようにCAN経由で得られる車速信号に基づいて算出する。このマップマッチング処理により、自車位置を特定してその地図上に投影する際に、現在走行中と推定される道路の上に自車位置が位置するように自律的に補正される。
【0025】
なお、前回算出を行った場所からの移動距離が、図9のような車速に応じた移動距離に達していない場合には後述する図7のステップS22に進む。
【0026】
マップマッチング処理の実行後、N/S演算部1での道路先読み機能(以下、この機能を「プレビュー機能」と称する。)を実行し、自車から数百メートル先、例えば前方800m先の道路情報としてノード(誘導経路を構成する経緯度)およびリンクを地図データ5から読み込むとともに(ステップS4)、そのプレビュー結果から自車の進路推定を行う(ステップS5)。そして、その推定進路上に徐行区間がある場合には運転支援アプリ制御部11との協働により「徐行区間アプリ」が実行される(ステップS6)。また、推定進路上に徐行区間がない場合にはステップS7に進む。
【0027】
なお、ステップS7での処理は後述する図5のステップS18の処理と同じであり、後述するように走行制御コントロールユニット12側での最適な区間内通過速度Vに基づいた目標車速の算出や車速制御が実行されることはない。
【0028】
ステップS6の「徐行区間アプリ」の実行は、最初にマップマッチングした自車位置から徐行区間の入口および出口までの距離Lin1およびLout1を地図データ5からそれぞれ算出する(ステップS8)。
【0029】
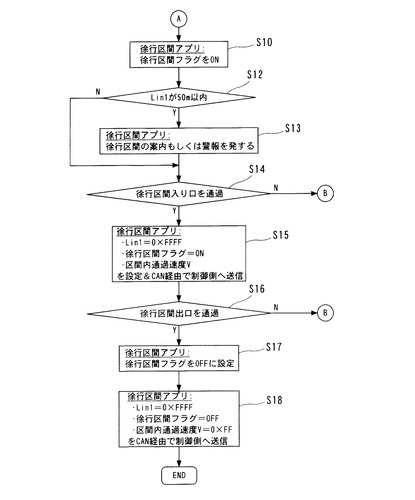
次いで、徐行区間の入口までの残距離Lin1が第1の所定値以内、例えば400m以内であるか否かを判定し(ステップS9)、400m以内である場合には、図5のステップS10に示すように「徐行区間フラグ」をONに設定し、他方、徐行区間の入口までの残距離Lin1が第1の所定値以内でない場合、上記の例では例えば400mを超えているような場合には、ステップS11において「徐行区間フラグ」をOFFに設定した上で図6のステップS19に移行し、ここにおいて400m以上先にある徐行区間の最適な区間内通過速度Vを予め算出する。
【0030】
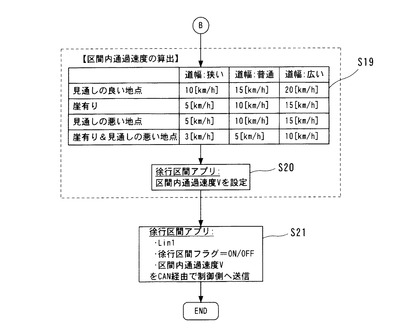
この区間内通過速度Vの算出は、図3に基づいて先に説明した通りであって、該当する徐行区間の道路状況や周囲の環境情報(道路環境情報)、例えばその徐行区間の道幅の広狭や見通しの善し悪し等の道路状況を図2の環境情報取得部13が地図データ5から読み取った上で、その道路状況下では予め設定されている徐行速度よりも減速が必要な否かを状況判断部14で判断し、減速が必要と判断した場合には、区間内通過速度演算部15において図3に示すように道幅の広狭や見通しの善し悪し等の複数の状況に応じて最適な区間内通過速度Vを求める。
【0031】
図3,6の例では、先にも述べたように例えば該当する徐行区間では、見通しが悪く、且つ道幅が狭いという状況下であった場合、区間内通過速度Vは5km/hとして求められることから、区間内通過速度V=5km/hに設定することになる(ステップS20)。そして、運転支援アプリ制御部11は、該当する「徐行区間の入口までの距離Lin1」の情報と、ステップS11での「徐行区間フラグ=OFF」の情報、および「区間内通過速度V」の情報をCAN経由にて走行制御コントロールユニット12側に送信する(ステップS21)。
【0032】
なお、「徐行区間の入口までの距離Lin1」の情報と「区間内通過速度V」の情報が「徐行区間フラグ=OFF」の情報とともに走行制御コントロールユニット12側に送信されたとしても、「徐行区間フラグ」がOFFであるかぎりは走行制御コントロールユニット12では徐行区間を前提とした車速制御が実行されることはない。
【0033】
「徐行区間フラグ」をONに設定した図5のステップS10の次のステップS12では、徐行区間の入口までの残距離Lin1が第2の所定値以内、例えば50m以内であるか否かを判定し、50m以内である場合にはステップS13において徐行区間が近いことの案内または警報を発する。より具体的には、ディスプレイ9の画面への残距離Lin1の可視表示、例えば残距離Lin1のインジケータによる可視表示やスピーカ10からの音声ガイダンス等をもって徐行区間が近いことを予告する。なお、この予告は先に述べた徐行区間前減速制御に関するアプリケーションの一環として行われることもある。
【0034】
なお、ステップS12において徐行区間の入口までの残距離Lin1が第2の所定値以内でないと判定した場合、例えば50m以内でないと判定した場合には、次のステップS13を飛ばしてさらに次のステップS14に移行する。
【0035】
次に、ステップS14において自車が徐行区間の入口を通過したか否かを判定し、徐行区間の入口を通過したと判定した場合には、次のステップS15において徐行区間までの距離Lin1を0(ゼロ)(図5では0xFFFFと表示)または初期値にリセットし、同時に先にステップS20で求めた区間内通過速度Vをそれぞれ設定する。そして、運転支援アプリ制御部11は、該当する「徐行区間の入口までの距離Lin1=0」の情報と「区間内通過速度V」の情報を、ステップS10で設定した「徐行区間フラグ=ON」の情報とともにCAN経由にて走行制御コントロールユニット12側に送信する。走行制御コントロールユニット12側では上記の情報に基づいて走行制御を実行し、特に区間内通過速度Vに応じた目標車速を演算した上で、その目標車速となるように減速(ブレーキ制御)または加速制御を実行する。
【0036】
ここで、先に述べたような徐行区間を前提とした規制速度制御に関する運転支援アプリケーションが併用されている場合には、その徐行区間の徐行速度が予め設定されているので、徐行区間アプリの実行に基づく走行制御コントロールユニット12側での目標車速は、上記のような区間内通過速度Vに応じた目標車速に更新または補正される。
【0037】
この車速制御の結果の区間内通過速度Vには、先に述べたように該当する徐行区間の道路状況や周囲の環境情報、例えばその徐行区間の道幅の広狭や見通しの善し悪し等の道路状況が反映されているので、その徐行区間を実走行する際の車速が速すぎたりあるいは遅すぎたりすることがなく、個々の徐行区間の道路状況に見合った適切な速度、すなわち先に求めた区間内通過速度Vのもとで走行できることになる。
【0038】
その一方、ステップS14において自車が徐行区間の入口を通過していないと判定した場合には、この段階では徐行区間の入口までの残距離Lin1が第2の所定値以内、例えば50m以内であることは既知であるので(ステップS12参照)、図6のステップS19〜S21に移行して、先に述べたような当該ステップS19〜S21の処理を実行する。
【0039】
さらに、図5のステップS15の次のステップS16において、自車が徐行区間の出口を通過したか否かを判定し、徐行区間の出口を通過したと判定した場合には、運転支援アプリ制御部11は、次のステップS17において「徐行区間フラグ」をOFFに設定した上で、次のステップS18にて徐行区間までの距離Lin1を0(ゼロ)(図5では0xFFFと表示)または初期値にリセットするとともに、区間内通過速度Vも0(ゼロ)(図5では0xFFと表示)または初期値にリセットする。そして、それらの情報をステップS17での「徐行区間フラグ=OFF」の情報とともに、CAN経由にて走行制御コントロールユニット12側に送信する。この「徐行区間フラグ=OFF」の情報をもって、走行制御コントロールユニット12側では先に述べたような区間内通過速度Vに基づいた目標車速の算出やその目標車速に応じた車速制御がキャンセルされる。
【0040】
また、図5のステップS16において徐行区間の出口を通過していないと判定した場合には、いまだ該当する徐行区間内に自車があることは既知であるので(ステップS14参照)、図6のステップS19〜S21に移行して、先に述べたような当該ステップS19〜S21の処理を実行する。
【0041】
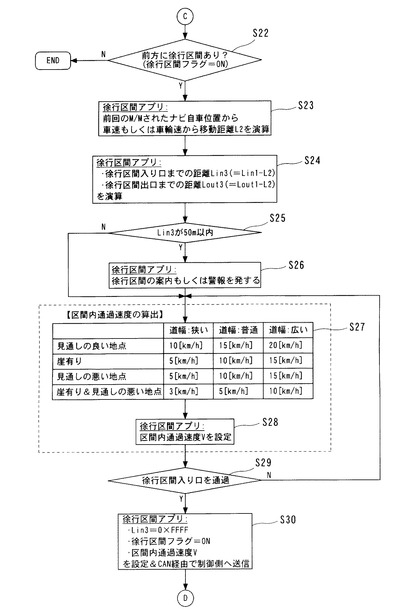
図4のステップS2において当該ステップS2での条件が成立していない場合、すなわち前回に自車位置算出を行った場所からの移動距離が図9のような車速に応じた移動距離に達していない場合には図7のステップS22に進み、当該ステップS22において地図データ5上での進路前方に徐行区間があるか否かを判定する。進路前方に徐行区間がある場合には直ちに「徐行区間フラグ」をONに設定するとともに、次のステップS23において前回のマップマッチング処理により算出された自車位置からの移動距離L2を算出する。
【0042】
ここで、図4に基づいて先に述べたように、自車位置から徐行区間の入口および出口までの残距離Lin1およびLout1は一定周期ごとのマップマッチングのタイミングで算出されるものであるから、その精度が粗いものとなる。そのため、マップマッチング処理が行われない区間において、徐行区間の入口および出口までの残距離計算の補完を行う必要がある。そこで、ステップS22およびS23のように、自車の移動距離がマップマッチング処理実行距離以下で且つ進路前方に徐行区間がある場合には、先の「徐行区間アプリ」の一環として補完処理を実行する。
【0043】
すなわち、ステップS23のように、前回のマップマッチング処理を実行した自車位置からCAN経由で得られる車速信号または車輪速信号を用いて現在位置までの移動距離L2を算出し、その移動距離L2の値をもとに、次のステップS24において現在の徐行区間の入口までの距離Lin3(=Lin1−L2)および出口までの距離Lout3(=Lout1−L2)を算出する。
【0044】
そして、次のステップS25において現在の徐行区間の入口までの距離Lin3が第2の所定値以内であるか否か、例えば50m以内であるか否かを判定し、徐行区間の入口までの距離Lin3が50m以内である場合には、ステップS26において図5のステップS13の場合と同様に徐行区間が近いことの案内または警報を発する。
【0045】
さらに、次のステップS27,S28において、入口までの距離Lin3が50m以内と迫っている徐行区間の最適な区間内通過速度Vを図6のステップS19,S20と同じ手順で求める。そして、ステップS29において該当する徐行区間の入口を通過したと判定すれば、次のステップS30において図5のステップS15と全く同じ手順で最適な区間内通過速度Vに基づく目標車速の算出やその目標車速のもとでの車速制御が実行される。
【0046】
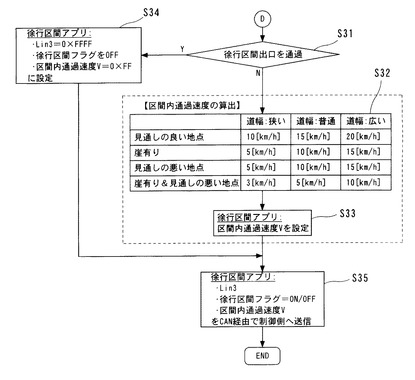
この後、図8のステップS31において該当する徐行区間の出口を通過したか否かを判定し、徐行区間の出口を通過していなければ次のステップS32,S33において先のステップS27,S28と同じ処理が繰り返し実行される。すなわち、該当する徐行区間を走行してかぎり最適な区間内通過速度Vのもとでの車速制御が実行される。
【0047】
他方、図8のステップS31において徐行区間の出口を通過したと判定した場合には、ステップS34において、「徐行区間フラグ」をOFFに設定するとともに、Lin3の値を0(ゼロ)(図8では0xFFFFと表示)または初期値に、区間内通過速度Vを0(ゼロ)(図8では0xFFと表示)または初期値にそれぞれリセットし、次のステップS35においてそれらの情報を走行制御コントロールユニット12側に送信する。これにより、徐行区間走行中の先に述べたような区間内通過速度Vに基づいた目標車速の算出やその目標車速に応じた車速制御がキャンセルされることになる。
【0048】
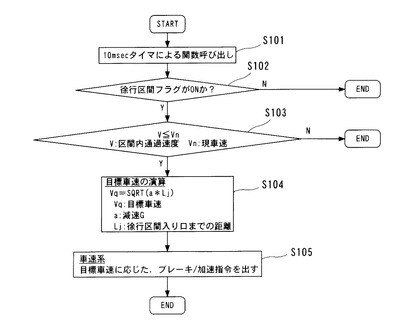
図10は上記徐行区間に関する運転支援アプリケーションが実行される際の走行制御コントロールユニット12側での処理手順すなわち「徐行区間アプリ」実行時の走行制御コントロールユニット12側での処理手順を示し、N/S演算部1からの情報をもとに、「徐行区間フラグ」がONであることを条件に目標車速を演算し(ステップS101〜S104)、その目標速度に応じたブレーキまたは加速指令をブレーキ制御系またはスロットル制御系に出力することになる(ステップS105)。
【0049】
このように本実施の形態によれば、徐行区間への進入前に当該徐行区間の設定徐行速度まで単に減速制御を行うだけでなく、徐行区間の実走行時の車速が当該徐行区間における道路幅等の周囲の環境が反映された最適な区間内通過速度となるので、その徐行区間を走行する際の車速が速すぎたりあるいは遅すぎることがなくなり、個々の徐行区間の道路状況に見合った適切な速度で走行できるようになり、安全性が一段と向上する。
【0050】
図11〜13は本発明に係る車両運転支援システムの第2の実施の形態を示し、先の第1の実施の形態では、道路環境情報として、地図データ上での徐行区間位置に関連付けらて予め記憶されているものを使用するようにしているのに対して、本実施の形態では、道路環境情報として、車載下にある監視カメラ20が捉えた視覚情報から取得するようにしたものである。
【0051】
なお、図11,12において、先の図1,2と共通する部分には同一符号を付してある。
【0052】
より詳しくは、図11,12に示すように、N/S演算部1の運転支援アプリ制御部11には、車載状態にある前方監視カメラ、後方監視カメラあるいはアラウンド・ビュー・モニター(車両を上方から見た時、当該車両の周囲360度の範囲を複数のカメラで可視化可能としてシステム)等の監視カメラ20が付帯していて、その監視カメラ20が捉えた視覚情報が画像認識処理装置を兼ねた環境情報取得部23に入力されるようになっている。
【0053】
この監視カメラ20が捉えた視覚情報は、徐行区間アプリの実行に関する限りにおいて、先に述べたように自車両が所定の徐行区間に所定距離まで接近した時に初めて有効とされる(図13のステップS41)。そして、徐行区間に接近したならば画像認識処理装置を兼ねた環境情報取得部23では監視カメラ20からの視覚情報をもとにパターンマッチング等の手法により画像認識を行い、徐行区間での周囲の状況として道幅の広狭や見通しの善し悪し、あるいは崖の有無等の状況を把握する(ステップS42)。
【0054】
以降の処理は第1の実施の形態と同様であり、上記の道路状況または周囲状況をもとに、予め設定されている徐行速度よりも減速または加速が必要か否かを状況判断部14が判断し、予め設定されている徐行速度よりも減速または加速が必要と判断した場合には、区間内通過速度演算部15では環境情報取得部13が取得した道路環境情報をもとに図3の速度算出テーブルと照合して、徐行区間の道路環境に見合った最適な区間内通過速度を決定する(ステップS43)。
【0055】
この第2に実施の形態によれば、先の第1の実施の形態と同様の効果が得られるほか、特に徐行区間の実際の道路状況または周囲状況が反映されているので、一段と信頼性の高いものとなる。
【0056】
ここで、環境情報取得部23が受け取るべき情報は、監視カメラ20からの視覚情報に代えて、例えばVICSからの渋滞情報のほか、車車間通信あるいは路車間通信を利用して受け取ることができる情報とすることもまた可能である。
【図面の簡単な説明】
【0057】
【図1】本発明に係る車両運転支援システムの概略構造を示すブロック回路図。
【図2】図1の運転支援アプリ制御部の詳細を示すブロック回路図。
【図3】図2の速度算出テーブルの一例を示す説明図。
【図4】図1,2の運転支援アプリ制御部での徐行区間アプリに関する処置手順を示すフローチャート。
【図5】図4に続く処理手順を示すフローチャート。
【図6】図5に続く処理手順を示すフローチャート。
【図7】図6に続く処理手順を示すフローチャート。
【図8】図7に続く処理手順を示すフローチャート。
【図9】車速とマップマッチング実行距離との関係を示す特性図。
【図10】図1の走行制御コントロールユニットの処理手順を示すフローチャート。
【図11】本発明に係る車両運転支援システムの第2の実施の形態を示すブロック回路図。
【図12】図11の運転支援アプリ制御部の詳細を示すブロック回路図。
【図13】図11,12の運転支援アプリ制御部での徐行区間アプリに関する処置手順を示すフローチャート。
【符号の説明】
【0058】
1…ナビゲーションシステム演算部(N/S演算部)
5…地図データ
11…運転支援アプリケーション制御部(運転支援アプリ制御部)
12…走行制御コントロールユニット
13…環境情報取得部(環境情報取得手段)
14…状況判断部
15…区間内通過速度演算部(最適速度演算手段)
16…速度算出テーブル
20…監視カメラ
23…環境情報取得部(環境情報取得手段)
【技術分野】
【0001】
本発明は、車両に搭載されるナビゲーションシステムを活用した車両運転支援システムおよび車両運転支援方法に関し、特に地図データに格納または記録されている徐行区間に自車が進入する前に、その徐行区間のものとして予め設定されている徐行速度まで減速制御を行うようにした車両運転支援システムおよび車両運転支援方法に関するものである。
【背景技術】
【0002】
ナビゲーションシステムの地図データと自車位置情報とに基づいて実行される運転支援アプリケーションの一つとして制限速度に応じた減速制御が知られている。これは、地図データと自車位置情報とに基づいて自車位置の制限速度情報を読み出した上で現車速と照合し、制限速度を超えている場合には可視表示または音声ガイダンスをもって警報を発するシステム(例えば、特開平9−73600号公報)をさらに発展させものと理解することができる。すなわち、例えば特許文献1に記載されているように、自車両が地図データ上の一時停止地点で一時停止するように、所定距離だけ手前位置からその一時停止地点の接近を告知し、併せて余裕をもって車両の減速制御を行うようにしたものである。
【特許文献1】特開平10−76922号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1に代表されるような従来のシステムを別の運転支援アプリケーションの一つである徐行区間前減速制御に適用した場合、自車両が徐行区間に進入する前に予め定められた一律の速度(徐行区間制限速度)まで減速するにすぎず、場合によっては徐行区間に進入した以降に減速の過不足が発生する可能性がある。
【0004】
例えば、自車両が通過すべき徐行区間の位置データは地図データとともに予め格納または記録されてはいても、個々の徐行区間によって道路幅の広狭、見通しの善し悪し、土手や崖の有無等、徐行区間毎の道路状況や周囲環境が異なるため、上記のように一律に所定の徐行区間速制限度まで減速しただけでは、当該徐行区間を実走行する際の車速が速すぎたりあるいは遅すぎる等の減速の過不足が発生する可能性があり、なおも改善の余地を残している。
【0005】
本発明はこのような課題に着目してなされたもので、運転支援アプリケーションの一つである徐行区間前減速制御を行うことを前提とした上で、当該徐行区間の道路幅の広狭、見通しの善し悪し、土手や崖の有無等、個々の徐行区間毎の道路状況や周囲環境を考慮することで、その徐行区間の実走行の際に減速の過不足が生ずることなく、適正な速度で走行できるように考慮されたた車両運転支援システム等を提供するものである。
【課題を解決するための手段】
【0006】
本発明は、予め記憶された地図データと自車位置情報とに基づいて、その地図データに格納されている徐行区間への進入前に当該徐行区間の設定徐行速度まで減速制御を行うことを前提とした上で、徐行区間に進入する前に当該徐行区間における道路環境情報を取得する環境情報取得手段と、前記環境情報取得手段からの道路環境情報をもとに該当する徐行区間の道路環境に応じた最適な区間内通過速度を演算する最適速度演算手段とを備えていて、該当する徐行区間の実走行時に前記最適速度演算手段にて求めた区間内通過速度となるように車速を制御するようにした。
【0007】
環境情報取得手段によって取得される道路環境情報とは、先に述べたように個々の徐行区間によって異なる道路幅の広狭、見通しの善し悪し、土手や崖の有無等に代表されるような徐行区間の周囲の環境情報である。
【発明の効果】
【0008】
本発明によれば、徐行区間への進入前に当該徐行区間の設定徐行速度まで単に減速制御を行うだけでなく、徐行区間の実走行時の車速が当該徐行区間における道路幅等の周囲の環境が反映された最適な区内間通過速度となるようにしたので、その徐行区間を走行する際の車速が速すぎたりあるいは遅すぎることがなくなり、個々の徐行区間の道路状況に見合った適切な速度で走行できるようになり、安全性の向上に寄与できる。
【発明を実施するための最良の形態】
【0009】
図1以下の図面は本発明に係る車両運転支援システムのより具体的な実施の形態を示し、特に図1はそのシステム構成の概略を示している。
【0010】
図1のシステムは、周知のカーナビゲーションシステムと車両制御とを連携させたシステムとして車両に搭載されるもので、マイクロコンピュータを主体とするナビゲーションシステム演算部(以下、「N/S演算部」と略称する。)1を中心として構成される。
【0011】
N/S演算部1にはGPS受信機2、ジャイロスコープ3およびG(加速度)センサ4が付帯していて、それぞれの信号がN/S演算部1に入力されるほか、車速信号を含む各種の車両信号(情報)がCAN(Controller Area Network:車載機器の多重通信ネットワーク)経由にてN/S演算部1に入力される。これらのGPS受信機2、ジャイロスコープ3およびGセンサ4は自車位置を検出(測位)するための基本的なセンサとして機能する。また、N/S演算部1には、CD(Compact Disc)、DVD(Digital Versatile Disc)またはHDD(Hard Disc Drive)等の記録媒体にデータベースとして構築された地図データ(デジタル地図データ)5が付帯していて、道路地図データ等が逐次N/S演算部1に呼び出される。同時に、N/S演算部1には、必要に応じてラジオのFM受信機6やVICS受信機7等の通信機器を介して交通情報等が取り込まれる。
【0012】
そして、N/S演算部1では、上記センサ群からの自車位置検出用の信号に基づいて自車の現在位置(絶対位置)を高精度に算出する一方、その自車の現在位置データおよび地図データ5から得られる道路地図データに基づいて周知のパターンマッチングの手法にてマップマッチング処理を実行することにより、自車が地図上のどの位置に存在しているか、すなわち自車の地図上での相対位置を検出することになる。さらに、先に述べたCAN経由で得られる車速信号等の車両情報と地図データ5をもとに、自車位置から目的地までの経路誘導をするというカーナビゲーションシステムの基本機能が実現される。
【0013】
なお、上記地図データ5には、例えば日本全土の道路地図データのほか、それに付随する施設データ等を含むものである。さらに、上記道路地図データには、道路形状、道路種別、道路距離、道路幅員、道路勾配、道路名のほか、交通規制データ、さらには経路検索用の道路データ(リンクデータ)を含むものである。すなわち、上記道路地図データには、ITS(Intelligent Transport System)情報として、当該道路地図データに関連付けられた一時停止線、交差点、徐行区間、スクールゾーン等の位置情報のほか、道路のカーブにおける曲率情報、および各道路での規制速度情報等が含まれている。特に上記徐行区間については、地図データ上での徐行区間の位置情報に付帯する情報として、道路状況や周囲の環境情報、例えば道路幅の程度または度合い(道幅の大きさの段階的な情報として、狭い、普通、広い等)や、見通しの善し悪し、崖あるいは土手の有無等の情報が含まれている。
【0014】
また、上記N/S演算部1には、ユーザーが各種の操作あるいは指示を行うための操作スイッチ群8のほか、ナビゲーション情報や各種のメッセージあるいはガイダンス情報等を表示するための液晶モニタ等のディスプレイ9、さらには音声案内あるいは各種の警告音の発生のためのスピーカ10等が付帯しているほか、運転支援アプリケーション制御部(以下、「運転支援アプリ制御部」と略称する。)11が付帯している。
【0015】
そして、先にも述べたように、ディスプレイ9の画面に自車周辺の道路地図と共に自車の進行方向を含む現在位置を重ね合わせて表示させるロケータ機能や、ユーザにより指定された目的地までの推奨走行経路を自動的に計算してその経路を案内するルートガイダンス機能等のナビゲーション機能、すなわち地図表示(描画)、ルート探索、ルート案内等のナビゲーション機能が実現されることになる。
【0016】
上記運転支援アプリ制御部11は、自車周辺の地図データを利用した各種の運転支援アプリケーションの実行または制御をN/S演算部1と共に司るものであって、そのソフトウウェアによってそれぞれの運転支援アプリケーションが実行され、同時にその運転支援アプリ制御部11と車両側の走行制御系である走行制御コントロールユニット12との間で必要な情報の授受が行われる。なお、走行制御コントロールユニット12は車両の減速(制動)制御や加速制御を直接司るもので、例えば目標車速演算機能やエンジントルク演算機能のほか、ブレーキ液圧演算機能等を有している。
【0017】
ここでの運転支援アプリケーションとしては、車両側の走行制御コントロールユニット12と協調したブレーキ制御または加速制御であり、例えばITS情報として得られた一時停止線や交差点、徐行区間、スクールゾーン等のそれぞれの位置や距離情報に基づいた該当地点前減速制御や一時停止制御、道路ごとの規制速度情報に基づいたブレーキ制御または加速制御、およびカーブの位置情報や曲率情報に基づいたカーブ前減速制御(ブレーキ制御または加速制御)等のほか、それらに関するガイダンスを想定している。
【0018】
より具体的には、徐行区間前減速制御に関する運転支援アプリケーションとは、自車が通過すると予測される徐行区間までの自車位置からの残距離を車内に設けたディスプレイ9に表示するとともに音声でも告知し、その徐行区間進入前に予め設定された徐行速度まで減速させる自動ブレーキ制御機能をいう。
【0019】
同様に、規制速度制御に関する運転支援アプリケーションとは、法規制された速度を維持するための自動ブレーキ制御または加速制御をいい、徐行区間に関する運転支援アプリケーションも当該規制速度制御に関する運転支援アプリケーションに含まれる。
【0020】
上記運転支援アプリ制御部11は、図2に示すように、環境情報取得部(環境情報取得手段)13のほか、状況判断部14および区間内通過速度演算部(最適速度演算手段)15をそれぞれ備えており、該当する徐行区間の道路状況や周囲の環境情報(道路環境情報)を環境情報取得部13が地図データ5側から受け取ったならば、状況判断部14では予め設定されている徐行速度よりも減速または加速が必要な否かを判断し、減速または加速が必要と判断した場合には、区間内通過速度演算部15では後述するように道幅の広狭や見通しの善し悪し等の状況に応じて該当する徐行区間での最適な区間内通過速度を演算し、先の予め設定されている徐行速度を更新または補正するべく、その演算された区間内通過速度情報を走行制御コントロールユニット12側に出力することになる。
【0021】
ここでは、区間内通過速度演算部15に図3に示すような速度算出テーブル16が用意されていて、予め設定されている徐行速度よりも減速または加速が必要と状況判断部14で判断した場合には、区間内通過速度演算部15では環境情報取得部13が取得した道路環境情報をもとに図3の速度算出テーブルと照合して、徐行区間の道路環境に見合った最適な区間内通過速度を決定する。例えば図3の例では、該当する徐行区間の道路環境情報として得られたものが「見通しが悪い地点」で且つ「位置幅が狭い」というものであった場合には、徐行区間での最適な区間内通過速度は5km/hということになる。
【0022】
なお、本実施の形態では、該当する徐行区間の道路状況や周囲の環境情報(道路環境情報)として地図データ5に予め記録されているものを環境情報取得部13が受け取るようにしているが、これに限らず他の方式を採用することも可能である。例えば、後述するように環境情報取得部13は車両に搭載された前方監視カメラからの情報を取得するようにしても良い。
【0023】
次に、上記のような徐行区間に関する運転支援アプリケーション(以下、これを「徐行区間アプリ」と略称する。)の実行の手順を、図4以下のフローチャートを参照しながら説明する。なお、この徐行区間に関する運転支援アプリケーションは、先に述べた徐行区間前減速制御に関するアプリケーションとは独立して実行される。
【0024】
図4に示すように、N/S演算部1では、そのロケータ機能によるマップマッチング処理(図4では、一部「M/M」と記載してある。)を一定周期で実行する。ここでは、10msecタイマにより所定の関数を呼び出した上で(ステップS1)、図9に示すように車速に応じた移動距離ごとにマップマッチング処理を実行する(ステップS2,S3)。自車位置の算出は、前回に算出を行った場所からの移動距離およびその間の進行方向の変化を検出して行う。なお、自車の移動距離は図1に示すようにCAN経由で得られる車速信号に基づいて算出する。このマップマッチング処理により、自車位置を特定してその地図上に投影する際に、現在走行中と推定される道路の上に自車位置が位置するように自律的に補正される。
【0025】
なお、前回算出を行った場所からの移動距離が、図9のような車速に応じた移動距離に達していない場合には後述する図7のステップS22に進む。
【0026】
マップマッチング処理の実行後、N/S演算部1での道路先読み機能(以下、この機能を「プレビュー機能」と称する。)を実行し、自車から数百メートル先、例えば前方800m先の道路情報としてノード(誘導経路を構成する経緯度)およびリンクを地図データ5から読み込むとともに(ステップS4)、そのプレビュー結果から自車の進路推定を行う(ステップS5)。そして、その推定進路上に徐行区間がある場合には運転支援アプリ制御部11との協働により「徐行区間アプリ」が実行される(ステップS6)。また、推定進路上に徐行区間がない場合にはステップS7に進む。
【0027】
なお、ステップS7での処理は後述する図5のステップS18の処理と同じであり、後述するように走行制御コントロールユニット12側での最適な区間内通過速度Vに基づいた目標車速の算出や車速制御が実行されることはない。
【0028】
ステップS6の「徐行区間アプリ」の実行は、最初にマップマッチングした自車位置から徐行区間の入口および出口までの距離Lin1およびLout1を地図データ5からそれぞれ算出する(ステップS8)。
【0029】
次いで、徐行区間の入口までの残距離Lin1が第1の所定値以内、例えば400m以内であるか否かを判定し(ステップS9)、400m以内である場合には、図5のステップS10に示すように「徐行区間フラグ」をONに設定し、他方、徐行区間の入口までの残距離Lin1が第1の所定値以内でない場合、上記の例では例えば400mを超えているような場合には、ステップS11において「徐行区間フラグ」をOFFに設定した上で図6のステップS19に移行し、ここにおいて400m以上先にある徐行区間の最適な区間内通過速度Vを予め算出する。
【0030】
この区間内通過速度Vの算出は、図3に基づいて先に説明した通りであって、該当する徐行区間の道路状況や周囲の環境情報(道路環境情報)、例えばその徐行区間の道幅の広狭や見通しの善し悪し等の道路状況を図2の環境情報取得部13が地図データ5から読み取った上で、その道路状況下では予め設定されている徐行速度よりも減速が必要な否かを状況判断部14で判断し、減速が必要と判断した場合には、区間内通過速度演算部15において図3に示すように道幅の広狭や見通しの善し悪し等の複数の状況に応じて最適な区間内通過速度Vを求める。
【0031】
図3,6の例では、先にも述べたように例えば該当する徐行区間では、見通しが悪く、且つ道幅が狭いという状況下であった場合、区間内通過速度Vは5km/hとして求められることから、区間内通過速度V=5km/hに設定することになる(ステップS20)。そして、運転支援アプリ制御部11は、該当する「徐行区間の入口までの距離Lin1」の情報と、ステップS11での「徐行区間フラグ=OFF」の情報、および「区間内通過速度V」の情報をCAN経由にて走行制御コントロールユニット12側に送信する(ステップS21)。
【0032】
なお、「徐行区間の入口までの距離Lin1」の情報と「区間内通過速度V」の情報が「徐行区間フラグ=OFF」の情報とともに走行制御コントロールユニット12側に送信されたとしても、「徐行区間フラグ」がOFFであるかぎりは走行制御コントロールユニット12では徐行区間を前提とした車速制御が実行されることはない。
【0033】
「徐行区間フラグ」をONに設定した図5のステップS10の次のステップS12では、徐行区間の入口までの残距離Lin1が第2の所定値以内、例えば50m以内であるか否かを判定し、50m以内である場合にはステップS13において徐行区間が近いことの案内または警報を発する。より具体的には、ディスプレイ9の画面への残距離Lin1の可視表示、例えば残距離Lin1のインジケータによる可視表示やスピーカ10からの音声ガイダンス等をもって徐行区間が近いことを予告する。なお、この予告は先に述べた徐行区間前減速制御に関するアプリケーションの一環として行われることもある。
【0034】
なお、ステップS12において徐行区間の入口までの残距離Lin1が第2の所定値以内でないと判定した場合、例えば50m以内でないと判定した場合には、次のステップS13を飛ばしてさらに次のステップS14に移行する。
【0035】
次に、ステップS14において自車が徐行区間の入口を通過したか否かを判定し、徐行区間の入口を通過したと判定した場合には、次のステップS15において徐行区間までの距離Lin1を0(ゼロ)(図5では0xFFFFと表示)または初期値にリセットし、同時に先にステップS20で求めた区間内通過速度Vをそれぞれ設定する。そして、運転支援アプリ制御部11は、該当する「徐行区間の入口までの距離Lin1=0」の情報と「区間内通過速度V」の情報を、ステップS10で設定した「徐行区間フラグ=ON」の情報とともにCAN経由にて走行制御コントロールユニット12側に送信する。走行制御コントロールユニット12側では上記の情報に基づいて走行制御を実行し、特に区間内通過速度Vに応じた目標車速を演算した上で、その目標車速となるように減速(ブレーキ制御)または加速制御を実行する。
【0036】
ここで、先に述べたような徐行区間を前提とした規制速度制御に関する運転支援アプリケーションが併用されている場合には、その徐行区間の徐行速度が予め設定されているので、徐行区間アプリの実行に基づく走行制御コントロールユニット12側での目標車速は、上記のような区間内通過速度Vに応じた目標車速に更新または補正される。
【0037】
この車速制御の結果の区間内通過速度Vには、先に述べたように該当する徐行区間の道路状況や周囲の環境情報、例えばその徐行区間の道幅の広狭や見通しの善し悪し等の道路状況が反映されているので、その徐行区間を実走行する際の車速が速すぎたりあるいは遅すぎたりすることがなく、個々の徐行区間の道路状況に見合った適切な速度、すなわち先に求めた区間内通過速度Vのもとで走行できることになる。
【0038】
その一方、ステップS14において自車が徐行区間の入口を通過していないと判定した場合には、この段階では徐行区間の入口までの残距離Lin1が第2の所定値以内、例えば50m以内であることは既知であるので(ステップS12参照)、図6のステップS19〜S21に移行して、先に述べたような当該ステップS19〜S21の処理を実行する。
【0039】
さらに、図5のステップS15の次のステップS16において、自車が徐行区間の出口を通過したか否かを判定し、徐行区間の出口を通過したと判定した場合には、運転支援アプリ制御部11は、次のステップS17において「徐行区間フラグ」をOFFに設定した上で、次のステップS18にて徐行区間までの距離Lin1を0(ゼロ)(図5では0xFFFと表示)または初期値にリセットするとともに、区間内通過速度Vも0(ゼロ)(図5では0xFFと表示)または初期値にリセットする。そして、それらの情報をステップS17での「徐行区間フラグ=OFF」の情報とともに、CAN経由にて走行制御コントロールユニット12側に送信する。この「徐行区間フラグ=OFF」の情報をもって、走行制御コントロールユニット12側では先に述べたような区間内通過速度Vに基づいた目標車速の算出やその目標車速に応じた車速制御がキャンセルされる。
【0040】
また、図5のステップS16において徐行区間の出口を通過していないと判定した場合には、いまだ該当する徐行区間内に自車があることは既知であるので(ステップS14参照)、図6のステップS19〜S21に移行して、先に述べたような当該ステップS19〜S21の処理を実行する。
【0041】
図4のステップS2において当該ステップS2での条件が成立していない場合、すなわち前回に自車位置算出を行った場所からの移動距離が図9のような車速に応じた移動距離に達していない場合には図7のステップS22に進み、当該ステップS22において地図データ5上での進路前方に徐行区間があるか否かを判定する。進路前方に徐行区間がある場合には直ちに「徐行区間フラグ」をONに設定するとともに、次のステップS23において前回のマップマッチング処理により算出された自車位置からの移動距離L2を算出する。
【0042】
ここで、図4に基づいて先に述べたように、自車位置から徐行区間の入口および出口までの残距離Lin1およびLout1は一定周期ごとのマップマッチングのタイミングで算出されるものであるから、その精度が粗いものとなる。そのため、マップマッチング処理が行われない区間において、徐行区間の入口および出口までの残距離計算の補完を行う必要がある。そこで、ステップS22およびS23のように、自車の移動距離がマップマッチング処理実行距離以下で且つ進路前方に徐行区間がある場合には、先の「徐行区間アプリ」の一環として補完処理を実行する。
【0043】
すなわち、ステップS23のように、前回のマップマッチング処理を実行した自車位置からCAN経由で得られる車速信号または車輪速信号を用いて現在位置までの移動距離L2を算出し、その移動距離L2の値をもとに、次のステップS24において現在の徐行区間の入口までの距離Lin3(=Lin1−L2)および出口までの距離Lout3(=Lout1−L2)を算出する。
【0044】
そして、次のステップS25において現在の徐行区間の入口までの距離Lin3が第2の所定値以内であるか否か、例えば50m以内であるか否かを判定し、徐行区間の入口までの距離Lin3が50m以内である場合には、ステップS26において図5のステップS13の場合と同様に徐行区間が近いことの案内または警報を発する。
【0045】
さらに、次のステップS27,S28において、入口までの距離Lin3が50m以内と迫っている徐行区間の最適な区間内通過速度Vを図6のステップS19,S20と同じ手順で求める。そして、ステップS29において該当する徐行区間の入口を通過したと判定すれば、次のステップS30において図5のステップS15と全く同じ手順で最適な区間内通過速度Vに基づく目標車速の算出やその目標車速のもとでの車速制御が実行される。
【0046】
この後、図8のステップS31において該当する徐行区間の出口を通過したか否かを判定し、徐行区間の出口を通過していなければ次のステップS32,S33において先のステップS27,S28と同じ処理が繰り返し実行される。すなわち、該当する徐行区間を走行してかぎり最適な区間内通過速度Vのもとでの車速制御が実行される。
【0047】
他方、図8のステップS31において徐行区間の出口を通過したと判定した場合には、ステップS34において、「徐行区間フラグ」をOFFに設定するとともに、Lin3の値を0(ゼロ)(図8では0xFFFFと表示)または初期値に、区間内通過速度Vを0(ゼロ)(図8では0xFFと表示)または初期値にそれぞれリセットし、次のステップS35においてそれらの情報を走行制御コントロールユニット12側に送信する。これにより、徐行区間走行中の先に述べたような区間内通過速度Vに基づいた目標車速の算出やその目標車速に応じた車速制御がキャンセルされることになる。
【0048】
図10は上記徐行区間に関する運転支援アプリケーションが実行される際の走行制御コントロールユニット12側での処理手順すなわち「徐行区間アプリ」実行時の走行制御コントロールユニット12側での処理手順を示し、N/S演算部1からの情報をもとに、「徐行区間フラグ」がONであることを条件に目標車速を演算し(ステップS101〜S104)、その目標速度に応じたブレーキまたは加速指令をブレーキ制御系またはスロットル制御系に出力することになる(ステップS105)。
【0049】
このように本実施の形態によれば、徐行区間への進入前に当該徐行区間の設定徐行速度まで単に減速制御を行うだけでなく、徐行区間の実走行時の車速が当該徐行区間における道路幅等の周囲の環境が反映された最適な区間内通過速度となるので、その徐行区間を走行する際の車速が速すぎたりあるいは遅すぎることがなくなり、個々の徐行区間の道路状況に見合った適切な速度で走行できるようになり、安全性が一段と向上する。
【0050】
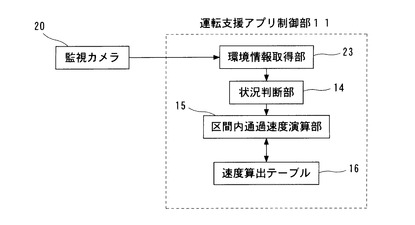
図11〜13は本発明に係る車両運転支援システムの第2の実施の形態を示し、先の第1の実施の形態では、道路環境情報として、地図データ上での徐行区間位置に関連付けらて予め記憶されているものを使用するようにしているのに対して、本実施の形態では、道路環境情報として、車載下にある監視カメラ20が捉えた視覚情報から取得するようにしたものである。
【0051】
なお、図11,12において、先の図1,2と共通する部分には同一符号を付してある。
【0052】
より詳しくは、図11,12に示すように、N/S演算部1の運転支援アプリ制御部11には、車載状態にある前方監視カメラ、後方監視カメラあるいはアラウンド・ビュー・モニター(車両を上方から見た時、当該車両の周囲360度の範囲を複数のカメラで可視化可能としてシステム)等の監視カメラ20が付帯していて、その監視カメラ20が捉えた視覚情報が画像認識処理装置を兼ねた環境情報取得部23に入力されるようになっている。
【0053】
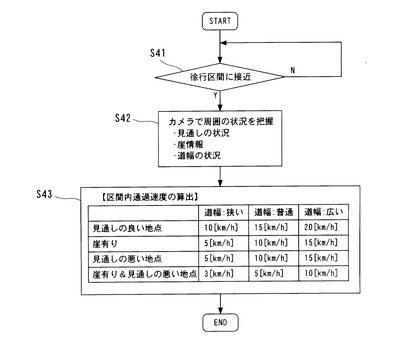
この監視カメラ20が捉えた視覚情報は、徐行区間アプリの実行に関する限りにおいて、先に述べたように自車両が所定の徐行区間に所定距離まで接近した時に初めて有効とされる(図13のステップS41)。そして、徐行区間に接近したならば画像認識処理装置を兼ねた環境情報取得部23では監視カメラ20からの視覚情報をもとにパターンマッチング等の手法により画像認識を行い、徐行区間での周囲の状況として道幅の広狭や見通しの善し悪し、あるいは崖の有無等の状況を把握する(ステップS42)。
【0054】
以降の処理は第1の実施の形態と同様であり、上記の道路状況または周囲状況をもとに、予め設定されている徐行速度よりも減速または加速が必要か否かを状況判断部14が判断し、予め設定されている徐行速度よりも減速または加速が必要と判断した場合には、区間内通過速度演算部15では環境情報取得部13が取得した道路環境情報をもとに図3の速度算出テーブルと照合して、徐行区間の道路環境に見合った最適な区間内通過速度を決定する(ステップS43)。
【0055】
この第2に実施の形態によれば、先の第1の実施の形態と同様の効果が得られるほか、特に徐行区間の実際の道路状況または周囲状況が反映されているので、一段と信頼性の高いものとなる。
【0056】
ここで、環境情報取得部23が受け取るべき情報は、監視カメラ20からの視覚情報に代えて、例えばVICSからの渋滞情報のほか、車車間通信あるいは路車間通信を利用して受け取ることができる情報とすることもまた可能である。
【図面の簡単な説明】
【0057】
【図1】本発明に係る車両運転支援システムの概略構造を示すブロック回路図。
【図2】図1の運転支援アプリ制御部の詳細を示すブロック回路図。
【図3】図2の速度算出テーブルの一例を示す説明図。
【図4】図1,2の運転支援アプリ制御部での徐行区間アプリに関する処置手順を示すフローチャート。
【図5】図4に続く処理手順を示すフローチャート。
【図6】図5に続く処理手順を示すフローチャート。
【図7】図6に続く処理手順を示すフローチャート。
【図8】図7に続く処理手順を示すフローチャート。
【図9】車速とマップマッチング実行距離との関係を示す特性図。
【図10】図1の走行制御コントロールユニットの処理手順を示すフローチャート。
【図11】本発明に係る車両運転支援システムの第2の実施の形態を示すブロック回路図。
【図12】図11の運転支援アプリ制御部の詳細を示すブロック回路図。
【図13】図11,12の運転支援アプリ制御部での徐行区間アプリに関する処置手順を示すフローチャート。
【符号の説明】
【0058】
1…ナビゲーションシステム演算部(N/S演算部)
5…地図データ
11…運転支援アプリケーション制御部(運転支援アプリ制御部)
12…走行制御コントロールユニット
13…環境情報取得部(環境情報取得手段)
14…状況判断部
15…区間内通過速度演算部(最適速度演算手段)
16…速度算出テーブル
20…監視カメラ
23…環境情報取得部(環境情報取得手段)
【特許請求の範囲】
【請求項1】
予め記憶された地図データと自車位置情報とに基づいて、その地図データに格納されている徐行区間への進入前に当該徐行区間での設定徐行速度となるように車速の制御を行うようにした車両運転支援システムにおいて、
前記徐行区間に進入する前に当該徐行区間における道路環境情報を取得する環境情報取得手段と、
前記環境情報取得手段からの道路環境情報をもとに該当する徐行区間の道路環境に応じた最適な区間内通過速度を演算する最適速度演算手段と、
を備えていて、
該当する徐行区間の実走行時に前記最適速度演算手段にて求めた区間内通過速度となるように車速を制御するようにしたことを特徴とする車両運転支援システム。
【請求項2】
前記最適速度演算手段は、環境情報取得手段が取得した複数の道路環境情報をもとに最適な区間内通過速度を演算するものであることを特徴とする請求項1に記載の車両運転支援システム。
【請求項3】
前記道路環境情報は、地図データ上での徐行区間位置に関連付けらて予め記憶されているものであることを特徴とする請求項1または2に記載の車両運転支援システム。
【請求項4】
前記道路環境情報は、車載下にある監視カメラが捉えた視覚情報から取得するものであることを特徴とする請求項1または2に記載の車両運転支援システム。
【請求項5】
予め記憶された地図データと自車位置情報とに基づいて、その地図データに格納されている徐行区間への進入前に当該徐行区間での設定徐行速度となるように車速の制御を行うようにした車両運転支援方法において、
前記徐行区間に進入する前に当該徐行区間における道路環境情報を取得し、
取得した道路環境情報をもとに該当する徐行区間の道路環境に応じた最適な区間内通過速度を演算して求め、
該当する徐行区間の実走行時に前記最適速度演算手段にて求めた区間内通過速度となるように車速を制御するようにしたことを特徴とする車両運転支援方法。
【請求項1】
予め記憶された地図データと自車位置情報とに基づいて、その地図データに格納されている徐行区間への進入前に当該徐行区間での設定徐行速度となるように車速の制御を行うようにした車両運転支援システムにおいて、
前記徐行区間に進入する前に当該徐行区間における道路環境情報を取得する環境情報取得手段と、
前記環境情報取得手段からの道路環境情報をもとに該当する徐行区間の道路環境に応じた最適な区間内通過速度を演算する最適速度演算手段と、
を備えていて、
該当する徐行区間の実走行時に前記最適速度演算手段にて求めた区間内通過速度となるように車速を制御するようにしたことを特徴とする車両運転支援システム。
【請求項2】
前記最適速度演算手段は、環境情報取得手段が取得した複数の道路環境情報をもとに最適な区間内通過速度を演算するものであることを特徴とする請求項1に記載の車両運転支援システム。
【請求項3】
前記道路環境情報は、地図データ上での徐行区間位置に関連付けらて予め記憶されているものであることを特徴とする請求項1または2に記載の車両運転支援システム。
【請求項4】
前記道路環境情報は、車載下にある監視カメラが捉えた視覚情報から取得するものであることを特徴とする請求項1または2に記載の車両運転支援システム。
【請求項5】
予め記憶された地図データと自車位置情報とに基づいて、その地図データに格納されている徐行区間への進入前に当該徐行区間での設定徐行速度となるように車速の制御を行うようにした車両運転支援方法において、
前記徐行区間に進入する前に当該徐行区間における道路環境情報を取得し、
取得した道路環境情報をもとに該当する徐行区間の道路環境に応じた最適な区間内通過速度を演算して求め、
該当する徐行区間の実走行時に前記最適速度演算手段にて求めた区間内通過速度となるように車速を制御するようにしたことを特徴とする車両運転支援方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2009−227106(P2009−227106A)
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願番号】特願2008−74913(P2008−74913)
【出願日】平成20年3月24日(2008.3.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成21年10月8日(2009.10.8)
【国際特許分類】
【出願日】平成20年3月24日(2008.3.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]