
車両運転支援装置
【課題】本発明は、車両運転支援装置に関し、車両運転者の生体を直接的に検出する生体センサを用いることなく車両運転者による漫然運転を予測することにある。
【解決手段】車両の走行する道路の環境が比較的良好であるか否かを判別し、その判別結果に基づいて車両運転者が漫然運転を行う可能性を推定する。例えば、道路環境が比較的良好であるときは、比較的劣悪であるときに比べて、車両運転者が漫然運転を行う可能性が高いと推定する。
【解決手段】車両の走行する道路の環境が比較的良好であるか否かを判別し、その判別結果に基づいて車両運転者が漫然運転を行う可能性を推定する。例えば、道路環境が比較的良好であるときは、比較的劣悪であるときに比べて、車両運転者が漫然運転を行う可能性が高いと推定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両運転支援装置に係り、特に、車両運転者が漫然運転を行う可能性を推定するうえで好適な車両運転支援装置に関する。
【背景技術】
【0002】
従来、車両運転者の眠気や注意力等の活性度を測定するシステムが知られている(例えば、特許文献1参照)。このシステムは、車両に搭載された、心拍数を示す信号を発する生体センサを備えており、かかる車載の生体センサの出力に基づいて車両運転者の眠気や注意力等の活性度を測定し、ぼんやりとした漫然運転が行われているか否かを判定する。
【特許文献1】特開2005−312653号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記したシステムでは、漫然運転有無の判定を行うため車両運転者の眠気や活性度を測定するのに、車両に搭載した生体センサを用いることが必要であるので、装置自体が過大となり、また、コストが高くなる不都合が生ずる。
【0004】
本発明は、上述の点に鑑みてなされたものであり、車両運転者の生体を直接的に検出する生体センサを用いることなく車両運転者による漫然運転を予測することが可能な車両運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記の目的は、車両の走行する道路の環境が比較的良好であるか否かを判別する道路環境判別手段と、前記道路環境判別手段の判別結果に基づいて車両運転者が漫然運転を行う可能性を推定する漫然運転可能性推定手段と、を備える車両運転支援装置により達成される。
【0006】
この態様の発明においては、車両の走行する道路の環境が比較的良好であるか否かに基づいて車両運転者が漫然運転を行う可能性が推定される。一般に、車両運転者は、道路環境が比較的劣悪であるときは、注意深く運転を行う傾向にあるが、一方、道路環境が比較的良好であるときは、あまり注意深くなくぼんやりとして運転を行う傾向にある。従って、本発明によれば、車両運転者の生体を直接的に検出する生体センサを用いることなく車両運転者による漫然運転の可能性を推定することができる。
【0007】
ところで、上記した車両運転支援装置において、前記漫然運転可能性推定手段は、前記道路環境判別手段により前記環境が比較的良好であると判別されるときは、該環境が比較的劣悪であると判別されるときに比べて、車両運転者が漫然運転を行う可能性が高いと推定することとすればよい。
【0008】
また、上記した車両運転支援装置において、前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合に、車両運転者の運転操作情報又は生体情報に基づいて、該車両運転者による漫然運転の有無を判定する漫然運転有無判定手段を備えることとすれば、車両運転者の運転操作情報又は生体情報を用いて車両運転者による漫然運転の有無を判定するタイミングを、道路環境が比較的良好であるかの判別結果に基づいて車両運転者が漫然運転を行う可能性が高いと推定した場合に限定することができるので、車両運転者の運転操作情報又は生体情報に基づく漫然運転の有無判定を常に行うことは不要となっている。
【0009】
また、上記した車両運転支援装置において、前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合に、車両運転者の運転を支援するレベルを通常よりも高める運転支援レベル変更手段を備えることとすれば、車両運転者が漫然運転を行う可能性が高いと推定された場合に運転支援レベルを通常よりも高めることができるので、漫然運転に伴う走行安全性の低下を抑止させることができる。
【0010】
この場合、前記運転支援レベル変更手段は、前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合、車両運転者の運転を支援するシステムの作動タイミングを早めることとしてもよい。
【0011】
更に、上記した車両運転支援装置において、前記道路環境判別手段は、インフラ装置から送信される情報に基づいて、前記環境としての天候が比較的良好であるか否か又は交通渋滞が生じていないか否かを判別することとしてもよい。
【0012】
尚、本発明において、「漫然運転」とは、周囲の状況などに集中しておらず、とりとめなくぼんやりとして行われる運転のことであり、過労・眠気等による注意力の低下、及び、思考・会話,脇見等による注意力の散漫が生じている運転のことである。
【発明の効果】
【0013】
本発明によれば、車両運転者の生体を直接的に検出する生体センサを用いることなく車両運転者による漫然運転を予測することができる。
【発明を実施するための最良の形態】
【0014】
以下、図面を用いて、本発明の具体的な実施の形態について説明する。
【実施例1】
【0015】
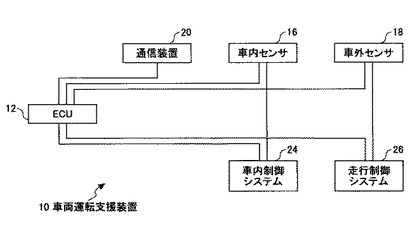
図1は、本発明の第1実施例である車両運転支援装置10のシステム構成図を示す。本実施例の車両運転支援装置10は、車両に搭載されており、車両走行時における車両運転者の認知・判断・操作を支援するための装置である。
【0016】
車両運転支援装置10は、マイクロコンピュータ等により構成される電子制御ユニット(以下、ECUと称す)12を備えている。ECU12は、車両走行時における車両運転者の認知・判断・操作を支援する処理を行う。
【0017】
ECU12には、車両の車内状態に関する情報を収集するための車内センサ16が電気的に接続されている。車内センサ16は、車両運転者の状態(生体や運転操作に関するもの)を除く車内の状態(例えば、室温やにおい,音,同乗者の有無など)に応じた信号を出力するセンサであって、内気温センサやにおいセンサ,マイク,シートセンサなどである。車内センサ16の各出力はそれぞれ、ECU12に供給される。ECU12は、車内センサ16の出力信号に基づいて、上記した車内の状態を検出する。
【0018】
ECU12には、また、車両外の状態に関する情報を収集するための車外センサ18が電気的に接続されている。車外センサ18は、車両外の状態(例えば、障害物や先行車両との相対距離や走行レーンの位置,外気温,降雨有無など)に応じた信号を出力するセンサであって、レーダセンサや車載カメラ,外気温センサ,降雨センサなどである。車外センサ18の各出力はそれぞれ、ECU12に供給される。ECU12は、車外センサ18の出力信号に基づいて、上記した車両外の状態を検出する。
【0019】
ECU12には、更に、車両の走行する道路の環境に関する情報を収集するための通信装置20が電気的に接続されている。通信装置20は、気象庁や道路情報センタなどの外部センタのインフラ装置から無線送信される、特に車載の車外センサ18を用いて検出することができるものを除く道路環境に関する情報(例えば、現状の天候や天気予報,渋滞情報,事故情報など)を受信する装置である。通信装置20の受信した情報は、ECU12に供給される。ECU12は、通信装置20から供給される情報に基づいて、上記した道路環境を取得する。そして、後述の如く、その取得した道路環境に基づいて、車両運転者が周囲の状況などに集中せずとりとめなくぼんやりとした運転(=漫然運転;過労・眠気等による注意力の低下、及び、思考・会話,脇見等による注意力の散漫が生じている運転のこと)を行う可能性を判定する。
【0020】
車両運転支援装置10は、エアコンやカーステレオなどの車内快適さに関する制御を行う車内制御システム24、及び、レーンキープやプリクラッシュセーフティなどの車両の安全走行を実現する制御を行う走行制御システム26を備えている。車内制御システム24及び走行制御システム26には共に、上記したECU12が電気的に接続されている。ECU12の判定した漫然運転の可能性に関する情報は、車内制御システム24及び走行制御システム26の双方にそれぞれ供給される。
【0021】
車内制御システム24には、上記した車内センサ16が直接に電気的に接続されている。車内センサ16の出力は、車内制御システム24にも供給される。車内制御システム24は、車内センサ16の出力信号に基づいて車内状態を検出して、その検出した車内状態に応じて車両運転者にとって快適な車内状態が実現されるような制御を行う。例えば、車内センサ16を用いて検出した内気温が所望値よりも高ければその所望値が実現されるようにエアコン制御を行い、また、車内センサ16を用いて検出したスピーカからの音量が所望値よりも高ければその所望値が実現されるように音量制御を行う。尚、これらの各所望値は、実験的に求められる一般的な値でもよいが、車両運転者個々に合わせた値であってもよい。
【0022】
走行制御システム26には、上記した車外センサ18が直接に電気的に接続されている。車外センサ18の出力は、走行制御システム26にも供給される。走行制御システム26は、車外センサ18の出力信号に基づいて車両外の状態を検出して、その検出した車両外の状態に応じて車両の安全走行が実現されるような制御を行う。例えば、自車両を道路に描かれた走行レーンから逸脱するのを防止してその走行レーンに沿って走行させるレーンキープモードでは、車外センサ18としてのカメラの撮像画像を処理して得た自車両に対する走行レーンの位置が所定のずれ量以上となればすなわち自車両と走行レーンとの位置関係が所望の位置関係になければ所定のタイミングでその所望の位置関係が実現されるようにステアリングアクチュエータを駆動する操舵制御を行う。また、自車両が障害物と衝突する際の衝撃を吸収するプリクラッシュセーフティモードでは、車外センサ18としてのレーダセンサを用いて検出した障害物との衝突までの時間(=衝突時間)が所定の時間を下回ると乗員への衝撃が緩和されるようにシートベルトの巻き取りやヘッドレストの高さ調整などの制御を行う。
【0023】
ところで、車両運転者の心拍数や体温,脳波などの生体を検出するうえでは、それらの生体を直接的に検出する生体センサを車両に独立して設置することが考えられる。しかし、周囲の状況などに集中せずとりとめなくぼんやりとして行われる運転(=漫然運転)の有無を判定するのに、その車両運転者の生体を直接的に検出する生体センサを用いることとすると、装置自体が過大となり、また、コストが高くなる不都合が生ずる。
【0024】
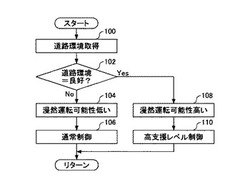
そこで、本実施例の車両運転支援装置10は、車両運転者の生体を直接的に検出する生体センサを用いることなく車両運転者による漫然運転を予測することに特徴を有している。以下、図2を参照して、本実施例の特徴部について説明する。図2は、本実施例の車両運転支援装置10においてECU12が実行する制御ルーチンの一例のフローチャートを示す。
【0025】
一般に、車両運転者は、降雨・降雪時或いは渋滞時などの道路環境が比較的劣悪であるときは、注意深く車両運転を行う傾向にあるが、一方、晴天時や渋滞無し時などの道路環境が比較的良好であるときは、あまり注意深くなくぼんやりとして車両運転を行う傾向にある。
【0026】
本実施例において、ECU12は、上記の如く、外部センタなどのインフラ装置から無線送信されて通信装置20に受信され、その通信装置20から供給される情報に基づいて、例えば、現状の天候や天気予報,渋滞情報,事故情報などの道路環境を取得する(ステップ100)。そして、その取得した道路環境が比較的良好であるか否かを判別する(ステップ102)。例えば、その判別を、現状走行する道路における天候が降雨量・降雪量が所定値以上となる雨天・雪天でないか否か、現状走行する道路において時速が所定時速以下となる渋滞が発生していないか否か、現状走行する道路が片側一車線である状況でその幅員が所定距離以上であるか否かなどを判別して、それらのうちの一つについて肯定判定がなされ或いは少なくとも2つ以上について肯定判定がされるか否かに基づいて行う。
【0027】
その結果、天候が雨天・雪天であり、道路渋滞が発生しており、或いは道路幅員が所定距離未満であることなどにより、道路環境が比較的劣悪であると判別した場合は、車両運転者が注意深く車両運転を行う傾向にあると判断し、漫然運転を行う可能性は低いと推定する(ステップ104)。かかる推定がなされると、ECU12から車内制御システム24へ通常どおりの制御が行われるように指令が行われる(ステップ106)。この場合には、車内制御システム24の制御及び走行制御システム26の制御が通常どおり行われる。
【0028】
一方、天候が雨天・雪天でなく、道路渋滞が発生しておらず、かつ道路幅員が所定距離以上であることなどにより、道路環境が比較的良好であると判別した場合は、車両運転者があまり注意深くなく車両運転を行う傾向にあると判断し、漫然運転を行う可能性が高いと推定する(ステップ108)。かかる推定がなされると、ECU12から車内制御システム24へ車両運転者による運転への支援レベルが通常よりも高い制御が行われるように指令が行われる(ステップ110)。この場合には、車内制御システム24の制御及び走行制御システム26の制御が車両運転者による運転への支援レベルを通常よりも高めて行われる。
【0029】
例えば、車内制御システム24においては、車両運転者による漫然運転が解消され易くなるように、スピーカからの音量がその時点におけるものよりも又は許容最大値に大きくされ、運転者の脳が活性化されるような音楽がスピーカから自動的に出力され、或いは、ブロワモータによる風量がその時点におけるものよりも又は許容最大値に大きくされる。また、走行制御システム26においては、レーンキープモードにおける自動操舵が通常よりも早めに開始され、或いは、プリクラッシュセーフティモードにおけるシートベルトの巻き取りなどが通常よりも早めに開始されるように、自動操舵やシートベルトの巻き取りを開始するうえで必要な自車両に対する走行レーンの位置や衝突時間の閾値が変更される。
【0030】
このように本実施例の車両運転支援装置10においては、車両運転者が漫然運転を行う可能性の推定が、インフラ装置から無線送信されて車載の通信装置20に受信される自車両の走行する道路の環境に関する情報に基づいて、具体的には、その道路環境が比較的良好であるか否かにより行われる。
【0031】
上記の如く、車両運転者は、道路環境が比較的劣悪であるときは、注意深く車両運転を行う傾向にあるが、一方、道路環境が比較的良好であるときは、あまり注意深くなくぼんやりとして車両運転を行う傾向にある。従って、本実施例の車両運転支援装置10によれば、その車両運転者の生体を直接的に検出する生体センサを用いることなく車両運転者による漫然運転の可能性を推定することが可能となっており、車両運転者による漫然運転の可能性を推定するのにかかる生体センサを用いることは不要となっている。
【0032】
このため、車両に車両運転者の生体を直接的に検出する生体センサを設置する必要はないので、車両運転者による漫然運転の可能性を推定するうえで車両運転支援装置10の構成を簡素化することができ、コスト低減を図ることができる。
【0033】
また、本実施例の車両運転支援装置10においては、車両運転者が漫然運転を行う可能性が高いと推定される場合、低いと推定される場合に比して(すなわち、通常よりも)、車内制御システム24の制御及び走行制御システム26の制御において車両運転者による運転への支援レベルが高められる。例えば、スピーカからの音量やブロワモータによる風量が大きくされ、運転者の脳を活性化する音楽が自動出力され、或いは自動操舵やシートベルトの巻き取りを開始するうえで必要な自車両に対する走行レーンの位置や衝突時間の閾値が変更される。従って、本実施例によれば、車両運転者が現実に漫然運転を行っていても、制御上における車両運転の支援レベルを高めることで、その漫然運転に伴う走行安全性の低下を抑止させることが可能となっている。
【0034】
尚、上記の第1実施例においては、ECU12が、図2に示すルーチン中ステップ102の処理を実行することにより特許請求の範囲に記載した「道路環境判別手段」が、ステップ104,108の処理を実行することにより特許請求の範囲に記載した「漫然運転可能性推定手段」が、ステップ110の処理を実行することにより特許請求の範囲に記載した「運転支援レベル変更手段」が、それぞれ実現されている。
【実施例2】
【0035】
上記した第1実施例では、外部のインフラ装置から送信されて通信装置20に受信された道路環境情報に基づいてその道路環境が比較的良好であるか否かを判別し、車両運転者が漫然運転を行う可能性を推定し、漫然運転の可能性が高いことが推定された場合に車両運転者による運転への支援レベルを高めることとしている。これに対して、本発明の第2実施例においては、車両運転者による漫然運転の可能性が高いことが推定された場合に、その漫然運転が行われているか否かを正確に判別することとしている。
【0036】
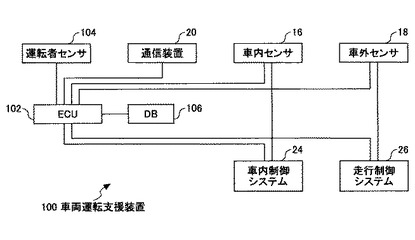
図3は、本発明の第2実施例である車両運転支援装置100のシステム構成図を示す。本実施例の車両運転支援装置100は、上記した第1実施例の車両運転装置10と同様に、車両に搭載されており、車両走行時における車両運転者の認知・判断・操作を支援するための装置である。尚、図3において、上記図1に示す構成と同一の部分については、同一の符号を付してその説明を省略又は簡略する。
【0037】
本実施例の車両運転支援装置100は、マイクロコンピュータ等により構成されるECU102を備えている。ECU102は、車両走行時における車両運転者の認知・判断・操作を支援する処理を行う。ECU102には、車内センサ16、車外センサ18、通信装置20、車内制御システム24、及び走行制御システム26が電気的に接続されている。
【0038】
ECU102には、また、車両運転者に関する情報を収集するための運転者センサ104が電気的に接続されている。運転者センサ104は、運転者の生体(例えば、心電図や体温,脈拍,呼吸数,顔情報,瞼の開閉,目線の動き,運転姿勢情報など)に応じた信号を出力する生体センサと、運転者による車両運転操作(例えば、操舵角やアクセル開度,ブレーキ操作有無など)に応じた信号を出力する運転操作センサと、を有している。運転者センサ104の各出力はそれぞれ、ECU102に供給される。ECU102は、運転者センサ104の出力信号に基づいて、上記した車両運転者の生体や車両運転操作に関する各種情報を収集して、現状における車両運転者の状態を検出する。
【0039】
ECU102には、また、車両運転者の個人情報を格納するデータベース106が電気的に接続されている。データベース106に格納される個人情報は、上記した運転者センサ104を用いて検出可能な車両運転者個人の生体や運転操作に関するものである。具体的には、データベース106には、車両運転者が周囲の状況などに集中して適切かつ迅速に運転操作を行うことが可能な運転(=通常運転)が行われる際における一般的・平均的なもの(少なくともその下限値と上限値とを含めればよい。)或いはその通常運転と漫然運転との境界値を示すものが格納される。
【0040】
ECU102は、データベース106に格納される情報を車両運転者個々の特性に合わせて更新する処理を行うことが可能であると共に、データベース106に格納される情報を読み出して所定の処理を行うことが可能である。尚、ECU102によるデータベース106の情報更新は、例えば、車両走行中に運転者センサ104の出力に基づいて検出される車両運転者の運転操作情報や生体情報を用いて学習するものであってもよく、車両のイグニションオンからイグニションオフまでの一回の車両走行当たりの分布傾向を用いるものでも、複数回の車両走行当たりの分布傾向を用いるものでもよく、また、通信接続された外部装置から車両運転者個々の特性に合致した情報を通信により書き込むものであってもよい。
【0041】
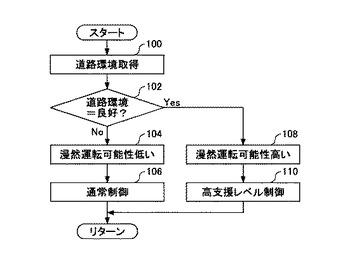
図4は、本実施例の車両運転支援装置100においてECU102が実行する制御ルーチンの一例のフローチャートを示す。尚、図4において、上記図2に示すルーチンと同一の処理を実行するステップについては、同一の符号を付してその説明を省略又は簡略する。
【0042】
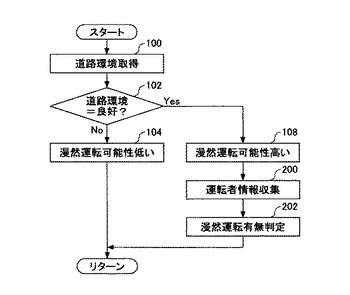
すなわち、ECU102は、取得した道路環境が比較的劣悪であると判別した場合(ステップ102における否定判定時)は、車両運転者が漫然運転を行う可能性は低いと推定し(ステップ104)、以後、何ら処理を進めることなくルーチンを終了する。一方、取得した道路環境が比較的良好であると判別した場合(ステップ102における肯定判定時)は、車両運転者が漫然運転を行う可能性が高いと推定し(ステップ108)、次に、その時点で運転者センサ104から供給される出力信号に基づいて、現状における車両運転者の状態情報を取得する(ステップ200)。
【0043】
ECU102は、上記の如く運転者センサ104を用いて現状における車両運転者の状態情報(運転操作センサの出力に基づく車両運転操作情報、及び、生体センサの出力に基づく生体情報)を取得すると、それら何れか一以上の情報に基づいて、車両運転者が漫然運転を行っているか否かの判定を行う(ステップ202)。具体的には、運転者センサ104からの現状における車両運転者の状態を、データベース106に格納されている通常運転が行われるときのその車両運転者個人の状態と比較して、漫然運転の有無を判定する。
【0044】
例えば、車両運転者の瞼の開閉(瞬き)の単位時間当たりの回数が通常運転時におけるものよりも少ないとき、目線の動きが通常運転時におけるものよりも少ない或いは小さいとき、体温が常態よりも暖かいとき、運転姿勢が通常運転時におけるものよりも前傾になる傾向があるとき、ブレーキ操作が通常運転時におけるものよりも緩慢であるとき、車両操舵が通常運転時におけるものよりも遅れて行われるとき、ブレーキ操作からアクセル操作への踏み換え或いはその逆の踏み換えが通常運転時におけるものよりも遅れて行われるときなどは、車両運転者が漫然運転を行っていると判定する。
【0045】
運転者センサ104は、車両運転者の生体や車両運転操作に関する各種情報を収集して現状における車両運転者の状態を検出するためのセンサであるので、その運転者センサ104を用いて検出される車両運転者の状態に基づく漫然運転の有無判定は、道路環境に基づくものに比べて、その判定精度が高い。従って、本実施例の車両運転支援装置100によれば、車両運転者による漫然運転の有無を精度よく判定することが可能となっている。
【0046】
また、本実施例の車両運転支援装置100において、運転者センサ104を用いて検出される車両運転者の運転操作情報や生体情報に基づく漫然運転の有無判定は、通信装置20を用いて取得した道路環境が比較的良好であるかの判別結果に基づいてその道路環境が比較的劣悪であることで車両運転者が漫然運転を行う可能性は低いと推定した場合には行われず、道路環境が比較的良好であることで車両運転者が漫然運転を行う可能性が高いと推定した場合に始めて行われる。すなわち、その漫然運転の有無を判定するタイミングは、その道路環境が比較的良好であることで車両運転者が漫然運転を行う可能性が高いと推定した場合に限られる。
【0047】
このため、本実施例においては、運転者センサ104を用いた車両運転者の運転操作情報や生体情報に基づく漫然運転の有無判定を常に行うことは不要であり、運転者センサ104の出力を常に監視することは不要であるので、その運転者センサ104の出力を処理することに伴う負荷が軽減され、電力消費が低減されることとなる。
【0048】
従って、本実施例の車両運転支援装置100によれば、必要なときに限定して運転者センサ104の出力に基づく車両運転者の運転操作情報や生体情報からその漫然運転の有無を判定しつつ、その漫然運転の有無判定の結果を精度の良いものとすることが可能となっている。
【0049】
尚、本実施例においては、車両運転者の運転操作情報や生体情報に基づく漫然運転の有無判定が、運転者センサ104を用いて検出される現状における運転操作情報や生体情報と、データベース106に格納されている通常運転が行われるときのその車両運転者個人の運転操作情報や生体情報と、を比較して行われる。漫然運転が行われているか否かについては車両運転者に応じた個人差があるが、データベース106に格納される情報は、車両運転者個々の特性に合わせて更新され得るものであり、車両運転者個々の特性に合わせたものである。従って、本実施例の車両運転支援装置100によれば、運転者センサ104の出力に基づく車両運転者の運転操作情報や生体情報から、漫然運転の有無を、車両運転者個々の特性に合わせて正確に判定することが可能となっている。
【0050】
尚、上記の第2実施例においては、ECU102が、図4に示すルーチン中ステップ102の処理を実行することにより特許請求の範囲に記載した「道路環境判別手段」が、ステップ104,108の処理を実行することにより特許請求の範囲に記載した「漫然運転可能性推定手段」が、ステップ202の処理を実行することにより特許請求の範囲に記載した「漫然運転有無判定手段」が、それぞれ実現されている。
【0051】
ところで、上記の第1及び第2実施例においては、外部のインフラ装置から無線送信される道路環境に関する情報に基づいて、その道路環境が比較的良好であるか或いは比較的劣悪であるかの2値的に判別することとし、その判別結果に基づいて車両運転者が漫然運転を行う可能性を高いか或いは低いかの2値的に推定することとしているが、道路環境の良好・劣悪のレベルを3段階以上のうちから判別することとし、漫然運転の可能性を3段階以上に分けて推定することとしてもよい。かかる変形例によれば、車両運転者による漫然運転の可能性の推定を更に木目細かく行うことが可能となる。
【0052】
また、上記の第1及び第2実施例においては、車両が道路環境に関する情報を外部のインフラ装置から無線送信されることにより取得することとしているが、車載センサや車載装置を用いて取得すること、例えば、雨天や雪天などの天候の情報を車載のレインセンサを用いて取得することとしてもよいし、また、道路幅員の情報をナビゲーションシステムの有する少なくとも道路と幅員との関係が予め格納された地図データベースから取得することとしてもよい。
【0053】
また、上記の第1実施例においては、通信装置20に受信される道路環境情報に基づく道路環境が比較的良好であるときは車両運転者による漫然運転の可能性が高いことを推定し、その場合に、車内制御システム24や走行制御システム26の制御における車両運転者による運転への支援レベルを高めることとし、また、上記の第2実施例においては、上記の如く道路環境の良好により車両運転者による漫然運転の可能性が高いことを推定した場合に、運転者センサ104の出力に基づく車両運転者の運転操作情報や生体情報から漫然運転の有無を精度よく判定することとしている。しかし、本発明は上記の第1実施例と第2実施例とを組み合わせて、道路環境の良好により車両運転者による漫然運転の可能性が高いことを推定した場合に、運転者センサ104を用いた漫然運転の有無を判定すると同時に、車内制御システム24や走行制御システム26の制御における車両運転者による運転への支援レベルを高めることとしてもよい。
【図面の簡単な説明】
【0054】
【図1】本発明の第1実施例である車両運転支援装置のシステム構成図である。
【図2】本実施例において実行される制御ルーチンの一例のフローチャートである。
【図3】本発明の第2実施例である車両運転支援装置のシステム構成図である。
【図4】本実施例において実行される制御ルーチンの一例のフローチャートである。
【符号の説明】
【0055】
10,100 車両運転支援装置
12,102 電子制御ユニット(ECU)
20 通信装置
24 車内制御システム
26 走行制御システム
104 運転者センサ
106 データベース
【技術分野】
【0001】
本発明は、車両運転支援装置に係り、特に、車両運転者が漫然運転を行う可能性を推定するうえで好適な車両運転支援装置に関する。
【背景技術】
【0002】
従来、車両運転者の眠気や注意力等の活性度を測定するシステムが知られている(例えば、特許文献1参照)。このシステムは、車両に搭載された、心拍数を示す信号を発する生体センサを備えており、かかる車載の生体センサの出力に基づいて車両運転者の眠気や注意力等の活性度を測定し、ぼんやりとした漫然運転が行われているか否かを判定する。
【特許文献1】特開2005−312653号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記したシステムでは、漫然運転有無の判定を行うため車両運転者の眠気や活性度を測定するのに、車両に搭載した生体センサを用いることが必要であるので、装置自体が過大となり、また、コストが高くなる不都合が生ずる。
【0004】
本発明は、上述の点に鑑みてなされたものであり、車両運転者の生体を直接的に検出する生体センサを用いることなく車両運転者による漫然運転を予測することが可能な車両運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記の目的は、車両の走行する道路の環境が比較的良好であるか否かを判別する道路環境判別手段と、前記道路環境判別手段の判別結果に基づいて車両運転者が漫然運転を行う可能性を推定する漫然運転可能性推定手段と、を備える車両運転支援装置により達成される。
【0006】
この態様の発明においては、車両の走行する道路の環境が比較的良好であるか否かに基づいて車両運転者が漫然運転を行う可能性が推定される。一般に、車両運転者は、道路環境が比較的劣悪であるときは、注意深く運転を行う傾向にあるが、一方、道路環境が比較的良好であるときは、あまり注意深くなくぼんやりとして運転を行う傾向にある。従って、本発明によれば、車両運転者の生体を直接的に検出する生体センサを用いることなく車両運転者による漫然運転の可能性を推定することができる。
【0007】
ところで、上記した車両運転支援装置において、前記漫然運転可能性推定手段は、前記道路環境判別手段により前記環境が比較的良好であると判別されるときは、該環境が比較的劣悪であると判別されるときに比べて、車両運転者が漫然運転を行う可能性が高いと推定することとすればよい。
【0008】
また、上記した車両運転支援装置において、前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合に、車両運転者の運転操作情報又は生体情報に基づいて、該車両運転者による漫然運転の有無を判定する漫然運転有無判定手段を備えることとすれば、車両運転者の運転操作情報又は生体情報を用いて車両運転者による漫然運転の有無を判定するタイミングを、道路環境が比較的良好であるかの判別結果に基づいて車両運転者が漫然運転を行う可能性が高いと推定した場合に限定することができるので、車両運転者の運転操作情報又は生体情報に基づく漫然運転の有無判定を常に行うことは不要となっている。
【0009】
また、上記した車両運転支援装置において、前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合に、車両運転者の運転を支援するレベルを通常よりも高める運転支援レベル変更手段を備えることとすれば、車両運転者が漫然運転を行う可能性が高いと推定された場合に運転支援レベルを通常よりも高めることができるので、漫然運転に伴う走行安全性の低下を抑止させることができる。
【0010】
この場合、前記運転支援レベル変更手段は、前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合、車両運転者の運転を支援するシステムの作動タイミングを早めることとしてもよい。
【0011】
更に、上記した車両運転支援装置において、前記道路環境判別手段は、インフラ装置から送信される情報に基づいて、前記環境としての天候が比較的良好であるか否か又は交通渋滞が生じていないか否かを判別することとしてもよい。
【0012】
尚、本発明において、「漫然運転」とは、周囲の状況などに集中しておらず、とりとめなくぼんやりとして行われる運転のことであり、過労・眠気等による注意力の低下、及び、思考・会話,脇見等による注意力の散漫が生じている運転のことである。
【発明の効果】
【0013】
本発明によれば、車両運転者の生体を直接的に検出する生体センサを用いることなく車両運転者による漫然運転を予測することができる。
【発明を実施するための最良の形態】
【0014】
以下、図面を用いて、本発明の具体的な実施の形態について説明する。
【実施例1】
【0015】
図1は、本発明の第1実施例である車両運転支援装置10のシステム構成図を示す。本実施例の車両運転支援装置10は、車両に搭載されており、車両走行時における車両運転者の認知・判断・操作を支援するための装置である。
【0016】
車両運転支援装置10は、マイクロコンピュータ等により構成される電子制御ユニット(以下、ECUと称す)12を備えている。ECU12は、車両走行時における車両運転者の認知・判断・操作を支援する処理を行う。
【0017】
ECU12には、車両の車内状態に関する情報を収集するための車内センサ16が電気的に接続されている。車内センサ16は、車両運転者の状態(生体や運転操作に関するもの)を除く車内の状態(例えば、室温やにおい,音,同乗者の有無など)に応じた信号を出力するセンサであって、内気温センサやにおいセンサ,マイク,シートセンサなどである。車内センサ16の各出力はそれぞれ、ECU12に供給される。ECU12は、車内センサ16の出力信号に基づいて、上記した車内の状態を検出する。
【0018】
ECU12には、また、車両外の状態に関する情報を収集するための車外センサ18が電気的に接続されている。車外センサ18は、車両外の状態(例えば、障害物や先行車両との相対距離や走行レーンの位置,外気温,降雨有無など)に応じた信号を出力するセンサであって、レーダセンサや車載カメラ,外気温センサ,降雨センサなどである。車外センサ18の各出力はそれぞれ、ECU12に供給される。ECU12は、車外センサ18の出力信号に基づいて、上記した車両外の状態を検出する。
【0019】
ECU12には、更に、車両の走行する道路の環境に関する情報を収集するための通信装置20が電気的に接続されている。通信装置20は、気象庁や道路情報センタなどの外部センタのインフラ装置から無線送信される、特に車載の車外センサ18を用いて検出することができるものを除く道路環境に関する情報(例えば、現状の天候や天気予報,渋滞情報,事故情報など)を受信する装置である。通信装置20の受信した情報は、ECU12に供給される。ECU12は、通信装置20から供給される情報に基づいて、上記した道路環境を取得する。そして、後述の如く、その取得した道路環境に基づいて、車両運転者が周囲の状況などに集中せずとりとめなくぼんやりとした運転(=漫然運転;過労・眠気等による注意力の低下、及び、思考・会話,脇見等による注意力の散漫が生じている運転のこと)を行う可能性を判定する。
【0020】
車両運転支援装置10は、エアコンやカーステレオなどの車内快適さに関する制御を行う車内制御システム24、及び、レーンキープやプリクラッシュセーフティなどの車両の安全走行を実現する制御を行う走行制御システム26を備えている。車内制御システム24及び走行制御システム26には共に、上記したECU12が電気的に接続されている。ECU12の判定した漫然運転の可能性に関する情報は、車内制御システム24及び走行制御システム26の双方にそれぞれ供給される。
【0021】
車内制御システム24には、上記した車内センサ16が直接に電気的に接続されている。車内センサ16の出力は、車内制御システム24にも供給される。車内制御システム24は、車内センサ16の出力信号に基づいて車内状態を検出して、その検出した車内状態に応じて車両運転者にとって快適な車内状態が実現されるような制御を行う。例えば、車内センサ16を用いて検出した内気温が所望値よりも高ければその所望値が実現されるようにエアコン制御を行い、また、車内センサ16を用いて検出したスピーカからの音量が所望値よりも高ければその所望値が実現されるように音量制御を行う。尚、これらの各所望値は、実験的に求められる一般的な値でもよいが、車両運転者個々に合わせた値であってもよい。
【0022】
走行制御システム26には、上記した車外センサ18が直接に電気的に接続されている。車外センサ18の出力は、走行制御システム26にも供給される。走行制御システム26は、車外センサ18の出力信号に基づいて車両外の状態を検出して、その検出した車両外の状態に応じて車両の安全走行が実現されるような制御を行う。例えば、自車両を道路に描かれた走行レーンから逸脱するのを防止してその走行レーンに沿って走行させるレーンキープモードでは、車外センサ18としてのカメラの撮像画像を処理して得た自車両に対する走行レーンの位置が所定のずれ量以上となればすなわち自車両と走行レーンとの位置関係が所望の位置関係になければ所定のタイミングでその所望の位置関係が実現されるようにステアリングアクチュエータを駆動する操舵制御を行う。また、自車両が障害物と衝突する際の衝撃を吸収するプリクラッシュセーフティモードでは、車外センサ18としてのレーダセンサを用いて検出した障害物との衝突までの時間(=衝突時間)が所定の時間を下回ると乗員への衝撃が緩和されるようにシートベルトの巻き取りやヘッドレストの高さ調整などの制御を行う。
【0023】
ところで、車両運転者の心拍数や体温,脳波などの生体を検出するうえでは、それらの生体を直接的に検出する生体センサを車両に独立して設置することが考えられる。しかし、周囲の状況などに集中せずとりとめなくぼんやりとして行われる運転(=漫然運転)の有無を判定するのに、その車両運転者の生体を直接的に検出する生体センサを用いることとすると、装置自体が過大となり、また、コストが高くなる不都合が生ずる。
【0024】
そこで、本実施例の車両運転支援装置10は、車両運転者の生体を直接的に検出する生体センサを用いることなく車両運転者による漫然運転を予測することに特徴を有している。以下、図2を参照して、本実施例の特徴部について説明する。図2は、本実施例の車両運転支援装置10においてECU12が実行する制御ルーチンの一例のフローチャートを示す。
【0025】
一般に、車両運転者は、降雨・降雪時或いは渋滞時などの道路環境が比較的劣悪であるときは、注意深く車両運転を行う傾向にあるが、一方、晴天時や渋滞無し時などの道路環境が比較的良好であるときは、あまり注意深くなくぼんやりとして車両運転を行う傾向にある。
【0026】
本実施例において、ECU12は、上記の如く、外部センタなどのインフラ装置から無線送信されて通信装置20に受信され、その通信装置20から供給される情報に基づいて、例えば、現状の天候や天気予報,渋滞情報,事故情報などの道路環境を取得する(ステップ100)。そして、その取得した道路環境が比較的良好であるか否かを判別する(ステップ102)。例えば、その判別を、現状走行する道路における天候が降雨量・降雪量が所定値以上となる雨天・雪天でないか否か、現状走行する道路において時速が所定時速以下となる渋滞が発生していないか否か、現状走行する道路が片側一車線である状況でその幅員が所定距離以上であるか否かなどを判別して、それらのうちの一つについて肯定判定がなされ或いは少なくとも2つ以上について肯定判定がされるか否かに基づいて行う。
【0027】
その結果、天候が雨天・雪天であり、道路渋滞が発生しており、或いは道路幅員が所定距離未満であることなどにより、道路環境が比較的劣悪であると判別した場合は、車両運転者が注意深く車両運転を行う傾向にあると判断し、漫然運転を行う可能性は低いと推定する(ステップ104)。かかる推定がなされると、ECU12から車内制御システム24へ通常どおりの制御が行われるように指令が行われる(ステップ106)。この場合には、車内制御システム24の制御及び走行制御システム26の制御が通常どおり行われる。
【0028】
一方、天候が雨天・雪天でなく、道路渋滞が発生しておらず、かつ道路幅員が所定距離以上であることなどにより、道路環境が比較的良好であると判別した場合は、車両運転者があまり注意深くなく車両運転を行う傾向にあると判断し、漫然運転を行う可能性が高いと推定する(ステップ108)。かかる推定がなされると、ECU12から車内制御システム24へ車両運転者による運転への支援レベルが通常よりも高い制御が行われるように指令が行われる(ステップ110)。この場合には、車内制御システム24の制御及び走行制御システム26の制御が車両運転者による運転への支援レベルを通常よりも高めて行われる。
【0029】
例えば、車内制御システム24においては、車両運転者による漫然運転が解消され易くなるように、スピーカからの音量がその時点におけるものよりも又は許容最大値に大きくされ、運転者の脳が活性化されるような音楽がスピーカから自動的に出力され、或いは、ブロワモータによる風量がその時点におけるものよりも又は許容最大値に大きくされる。また、走行制御システム26においては、レーンキープモードにおける自動操舵が通常よりも早めに開始され、或いは、プリクラッシュセーフティモードにおけるシートベルトの巻き取りなどが通常よりも早めに開始されるように、自動操舵やシートベルトの巻き取りを開始するうえで必要な自車両に対する走行レーンの位置や衝突時間の閾値が変更される。
【0030】
このように本実施例の車両運転支援装置10においては、車両運転者が漫然運転を行う可能性の推定が、インフラ装置から無線送信されて車載の通信装置20に受信される自車両の走行する道路の環境に関する情報に基づいて、具体的には、その道路環境が比較的良好であるか否かにより行われる。
【0031】
上記の如く、車両運転者は、道路環境が比較的劣悪であるときは、注意深く車両運転を行う傾向にあるが、一方、道路環境が比較的良好であるときは、あまり注意深くなくぼんやりとして車両運転を行う傾向にある。従って、本実施例の車両運転支援装置10によれば、その車両運転者の生体を直接的に検出する生体センサを用いることなく車両運転者による漫然運転の可能性を推定することが可能となっており、車両運転者による漫然運転の可能性を推定するのにかかる生体センサを用いることは不要となっている。
【0032】
このため、車両に車両運転者の生体を直接的に検出する生体センサを設置する必要はないので、車両運転者による漫然運転の可能性を推定するうえで車両運転支援装置10の構成を簡素化することができ、コスト低減を図ることができる。
【0033】
また、本実施例の車両運転支援装置10においては、車両運転者が漫然運転を行う可能性が高いと推定される場合、低いと推定される場合に比して(すなわち、通常よりも)、車内制御システム24の制御及び走行制御システム26の制御において車両運転者による運転への支援レベルが高められる。例えば、スピーカからの音量やブロワモータによる風量が大きくされ、運転者の脳を活性化する音楽が自動出力され、或いは自動操舵やシートベルトの巻き取りを開始するうえで必要な自車両に対する走行レーンの位置や衝突時間の閾値が変更される。従って、本実施例によれば、車両運転者が現実に漫然運転を行っていても、制御上における車両運転の支援レベルを高めることで、その漫然運転に伴う走行安全性の低下を抑止させることが可能となっている。
【0034】
尚、上記の第1実施例においては、ECU12が、図2に示すルーチン中ステップ102の処理を実行することにより特許請求の範囲に記載した「道路環境判別手段」が、ステップ104,108の処理を実行することにより特許請求の範囲に記載した「漫然運転可能性推定手段」が、ステップ110の処理を実行することにより特許請求の範囲に記載した「運転支援レベル変更手段」が、それぞれ実現されている。
【実施例2】
【0035】
上記した第1実施例では、外部のインフラ装置から送信されて通信装置20に受信された道路環境情報に基づいてその道路環境が比較的良好であるか否かを判別し、車両運転者が漫然運転を行う可能性を推定し、漫然運転の可能性が高いことが推定された場合に車両運転者による運転への支援レベルを高めることとしている。これに対して、本発明の第2実施例においては、車両運転者による漫然運転の可能性が高いことが推定された場合に、その漫然運転が行われているか否かを正確に判別することとしている。
【0036】
図3は、本発明の第2実施例である車両運転支援装置100のシステム構成図を示す。本実施例の車両運転支援装置100は、上記した第1実施例の車両運転装置10と同様に、車両に搭載されており、車両走行時における車両運転者の認知・判断・操作を支援するための装置である。尚、図3において、上記図1に示す構成と同一の部分については、同一の符号を付してその説明を省略又は簡略する。
【0037】
本実施例の車両運転支援装置100は、マイクロコンピュータ等により構成されるECU102を備えている。ECU102は、車両走行時における車両運転者の認知・判断・操作を支援する処理を行う。ECU102には、車内センサ16、車外センサ18、通信装置20、車内制御システム24、及び走行制御システム26が電気的に接続されている。
【0038】
ECU102には、また、車両運転者に関する情報を収集するための運転者センサ104が電気的に接続されている。運転者センサ104は、運転者の生体(例えば、心電図や体温,脈拍,呼吸数,顔情報,瞼の開閉,目線の動き,運転姿勢情報など)に応じた信号を出力する生体センサと、運転者による車両運転操作(例えば、操舵角やアクセル開度,ブレーキ操作有無など)に応じた信号を出力する運転操作センサと、を有している。運転者センサ104の各出力はそれぞれ、ECU102に供給される。ECU102は、運転者センサ104の出力信号に基づいて、上記した車両運転者の生体や車両運転操作に関する各種情報を収集して、現状における車両運転者の状態を検出する。
【0039】
ECU102には、また、車両運転者の個人情報を格納するデータベース106が電気的に接続されている。データベース106に格納される個人情報は、上記した運転者センサ104を用いて検出可能な車両運転者個人の生体や運転操作に関するものである。具体的には、データベース106には、車両運転者が周囲の状況などに集中して適切かつ迅速に運転操作を行うことが可能な運転(=通常運転)が行われる際における一般的・平均的なもの(少なくともその下限値と上限値とを含めればよい。)或いはその通常運転と漫然運転との境界値を示すものが格納される。
【0040】
ECU102は、データベース106に格納される情報を車両運転者個々の特性に合わせて更新する処理を行うことが可能であると共に、データベース106に格納される情報を読み出して所定の処理を行うことが可能である。尚、ECU102によるデータベース106の情報更新は、例えば、車両走行中に運転者センサ104の出力に基づいて検出される車両運転者の運転操作情報や生体情報を用いて学習するものであってもよく、車両のイグニションオンからイグニションオフまでの一回の車両走行当たりの分布傾向を用いるものでも、複数回の車両走行当たりの分布傾向を用いるものでもよく、また、通信接続された外部装置から車両運転者個々の特性に合致した情報を通信により書き込むものであってもよい。
【0041】
図4は、本実施例の車両運転支援装置100においてECU102が実行する制御ルーチンの一例のフローチャートを示す。尚、図4において、上記図2に示すルーチンと同一の処理を実行するステップについては、同一の符号を付してその説明を省略又は簡略する。
【0042】
すなわち、ECU102は、取得した道路環境が比較的劣悪であると判別した場合(ステップ102における否定判定時)は、車両運転者が漫然運転を行う可能性は低いと推定し(ステップ104)、以後、何ら処理を進めることなくルーチンを終了する。一方、取得した道路環境が比較的良好であると判別した場合(ステップ102における肯定判定時)は、車両運転者が漫然運転を行う可能性が高いと推定し(ステップ108)、次に、その時点で運転者センサ104から供給される出力信号に基づいて、現状における車両運転者の状態情報を取得する(ステップ200)。
【0043】
ECU102は、上記の如く運転者センサ104を用いて現状における車両運転者の状態情報(運転操作センサの出力に基づく車両運転操作情報、及び、生体センサの出力に基づく生体情報)を取得すると、それら何れか一以上の情報に基づいて、車両運転者が漫然運転を行っているか否かの判定を行う(ステップ202)。具体的には、運転者センサ104からの現状における車両運転者の状態を、データベース106に格納されている通常運転が行われるときのその車両運転者個人の状態と比較して、漫然運転の有無を判定する。
【0044】
例えば、車両運転者の瞼の開閉(瞬き)の単位時間当たりの回数が通常運転時におけるものよりも少ないとき、目線の動きが通常運転時におけるものよりも少ない或いは小さいとき、体温が常態よりも暖かいとき、運転姿勢が通常運転時におけるものよりも前傾になる傾向があるとき、ブレーキ操作が通常運転時におけるものよりも緩慢であるとき、車両操舵が通常運転時におけるものよりも遅れて行われるとき、ブレーキ操作からアクセル操作への踏み換え或いはその逆の踏み換えが通常運転時におけるものよりも遅れて行われるときなどは、車両運転者が漫然運転を行っていると判定する。
【0045】
運転者センサ104は、車両運転者の生体や車両運転操作に関する各種情報を収集して現状における車両運転者の状態を検出するためのセンサであるので、その運転者センサ104を用いて検出される車両運転者の状態に基づく漫然運転の有無判定は、道路環境に基づくものに比べて、その判定精度が高い。従って、本実施例の車両運転支援装置100によれば、車両運転者による漫然運転の有無を精度よく判定することが可能となっている。
【0046】
また、本実施例の車両運転支援装置100において、運転者センサ104を用いて検出される車両運転者の運転操作情報や生体情報に基づく漫然運転の有無判定は、通信装置20を用いて取得した道路環境が比較的良好であるかの判別結果に基づいてその道路環境が比較的劣悪であることで車両運転者が漫然運転を行う可能性は低いと推定した場合には行われず、道路環境が比較的良好であることで車両運転者が漫然運転を行う可能性が高いと推定した場合に始めて行われる。すなわち、その漫然運転の有無を判定するタイミングは、その道路環境が比較的良好であることで車両運転者が漫然運転を行う可能性が高いと推定した場合に限られる。
【0047】
このため、本実施例においては、運転者センサ104を用いた車両運転者の運転操作情報や生体情報に基づく漫然運転の有無判定を常に行うことは不要であり、運転者センサ104の出力を常に監視することは不要であるので、その運転者センサ104の出力を処理することに伴う負荷が軽減され、電力消費が低減されることとなる。
【0048】
従って、本実施例の車両運転支援装置100によれば、必要なときに限定して運転者センサ104の出力に基づく車両運転者の運転操作情報や生体情報からその漫然運転の有無を判定しつつ、その漫然運転の有無判定の結果を精度の良いものとすることが可能となっている。
【0049】
尚、本実施例においては、車両運転者の運転操作情報や生体情報に基づく漫然運転の有無判定が、運転者センサ104を用いて検出される現状における運転操作情報や生体情報と、データベース106に格納されている通常運転が行われるときのその車両運転者個人の運転操作情報や生体情報と、を比較して行われる。漫然運転が行われているか否かについては車両運転者に応じた個人差があるが、データベース106に格納される情報は、車両運転者個々の特性に合わせて更新され得るものであり、車両運転者個々の特性に合わせたものである。従って、本実施例の車両運転支援装置100によれば、運転者センサ104の出力に基づく車両運転者の運転操作情報や生体情報から、漫然運転の有無を、車両運転者個々の特性に合わせて正確に判定することが可能となっている。
【0050】
尚、上記の第2実施例においては、ECU102が、図4に示すルーチン中ステップ102の処理を実行することにより特許請求の範囲に記載した「道路環境判別手段」が、ステップ104,108の処理を実行することにより特許請求の範囲に記載した「漫然運転可能性推定手段」が、ステップ202の処理を実行することにより特許請求の範囲に記載した「漫然運転有無判定手段」が、それぞれ実現されている。
【0051】
ところで、上記の第1及び第2実施例においては、外部のインフラ装置から無線送信される道路環境に関する情報に基づいて、その道路環境が比較的良好であるか或いは比較的劣悪であるかの2値的に判別することとし、その判別結果に基づいて車両運転者が漫然運転を行う可能性を高いか或いは低いかの2値的に推定することとしているが、道路環境の良好・劣悪のレベルを3段階以上のうちから判別することとし、漫然運転の可能性を3段階以上に分けて推定することとしてもよい。かかる変形例によれば、車両運転者による漫然運転の可能性の推定を更に木目細かく行うことが可能となる。
【0052】
また、上記の第1及び第2実施例においては、車両が道路環境に関する情報を外部のインフラ装置から無線送信されることにより取得することとしているが、車載センサや車載装置を用いて取得すること、例えば、雨天や雪天などの天候の情報を車載のレインセンサを用いて取得することとしてもよいし、また、道路幅員の情報をナビゲーションシステムの有する少なくとも道路と幅員との関係が予め格納された地図データベースから取得することとしてもよい。
【0053】
また、上記の第1実施例においては、通信装置20に受信される道路環境情報に基づく道路環境が比較的良好であるときは車両運転者による漫然運転の可能性が高いことを推定し、その場合に、車内制御システム24や走行制御システム26の制御における車両運転者による運転への支援レベルを高めることとし、また、上記の第2実施例においては、上記の如く道路環境の良好により車両運転者による漫然運転の可能性が高いことを推定した場合に、運転者センサ104の出力に基づく車両運転者の運転操作情報や生体情報から漫然運転の有無を精度よく判定することとしている。しかし、本発明は上記の第1実施例と第2実施例とを組み合わせて、道路環境の良好により車両運転者による漫然運転の可能性が高いことを推定した場合に、運転者センサ104を用いた漫然運転の有無を判定すると同時に、車内制御システム24や走行制御システム26の制御における車両運転者による運転への支援レベルを高めることとしてもよい。
【図面の簡単な説明】
【0054】
【図1】本発明の第1実施例である車両運転支援装置のシステム構成図である。
【図2】本実施例において実行される制御ルーチンの一例のフローチャートである。
【図3】本発明の第2実施例である車両運転支援装置のシステム構成図である。
【図4】本実施例において実行される制御ルーチンの一例のフローチャートである。
【符号の説明】
【0055】
10,100 車両運転支援装置
12,102 電子制御ユニット(ECU)
20 通信装置
24 車内制御システム
26 走行制御システム
104 運転者センサ
106 データベース
【特許請求の範囲】
【請求項1】
車両の走行する道路の環境が比較的良好であるか否かを判別する道路環境判別手段と、
前記道路環境判別手段の判別結果に基づいて車両運転者が漫然運転を行う可能性を推定する漫然運転可能性推定手段と、
を備えることを特徴とする車両運転支援装置。
【請求項2】
前記漫然運転可能性推定手段は、前記道路環境判別手段により前記環境が比較的良好であると判別されるときは、該環境が比較的劣悪であると判別されるときに比べて、車両運転者が漫然運転を行う可能性が高いと推定することを特徴とする請求項1記載の車両運転支援装置。
【請求項3】
前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合に、車両運転者の運転操作情報又は生体情報に基づいて、該車両運転者による漫然運転の有無を判定する漫然運転有無判定手段を備えることを特徴とする請求項1又は2記載の車両運転支援装置。
【請求項4】
前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合に、車両運転者の運転を支援するレベルを通常よりも高める運転支援レベル変更手段を備えることを特徴とする請求項1乃至3の何れか一項記載の車両運転支援装置。
【請求項5】
前記運転支援レベル変更手段は、前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合、車両運転者の運転を支援するシステムの作動タイミングを早めることを特徴とする請求項4記載の車両運転支援装置。
【請求項6】
前記道路環境判別手段は、インフラ装置から送信される情報に基づいて、前記環境としての天候が比較的良好であるか否か又は交通渋滞が生じていないか否かを判別することを特徴とする請求項1乃至5の何れか一項記載の車両運転支援装置。
【請求項1】
車両の走行する道路の環境が比較的良好であるか否かを判別する道路環境判別手段と、
前記道路環境判別手段の判別結果に基づいて車両運転者が漫然運転を行う可能性を推定する漫然運転可能性推定手段と、
を備えることを特徴とする車両運転支援装置。
【請求項2】
前記漫然運転可能性推定手段は、前記道路環境判別手段により前記環境が比較的良好であると判別されるときは、該環境が比較的劣悪であると判別されるときに比べて、車両運転者が漫然運転を行う可能性が高いと推定することを特徴とする請求項1記載の車両運転支援装置。
【請求項3】
前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合に、車両運転者の運転操作情報又は生体情報に基づいて、該車両運転者による漫然運転の有無を判定する漫然運転有無判定手段を備えることを特徴とする請求項1又は2記載の車両運転支援装置。
【請求項4】
前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合に、車両運転者の運転を支援するレベルを通常よりも高める運転支援レベル変更手段を備えることを特徴とする請求項1乃至3の何れか一項記載の車両運転支援装置。
【請求項5】
前記運転支援レベル変更手段は、前記漫然運転可能性推定手段により車両運転者が漫然運転を行う可能性が高いと推定された場合、車両運転者の運転を支援するシステムの作動タイミングを早めることを特徴とする請求項4記載の車両運転支援装置。
【請求項6】
前記道路環境判別手段は、インフラ装置から送信される情報に基づいて、前記環境としての天候が比較的良好であるか否か又は交通渋滞が生じていないか否かを判別することを特徴とする請求項1乃至5の何れか一項記載の車両運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2009−18777(P2009−18777A)
【公開日】平成21年1月29日(2009.1.29)
【国際特許分類】
【出願番号】特願2007−184933(P2007−184933)
【出願日】平成19年7月13日(2007.7.13)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(507054456)
【公開日】平成21年1月29日(2009.1.29)
【国際特許分類】
【出願日】平成19年7月13日(2007.7.13)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(507054456)
[ Back to top ]