
車両運転支援装置
【課題】自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができ、ひいては、安全な運転を支援することができる「車両運転支援装置」を提供すること。
【解決手段】物体検出手段17によって車載カメラ5の撮影映像から強風注意喚起用物体19を検出し、検出された強風注意喚起用物体19の外観に基づいて強風注意要否判定手段20による強風への注意の要否の判定を行い、この判定の結果、注意が必要である場合には、強風注意警告出力手段22によって強風への注意を促す警告を行うこと。
【解決手段】物体検出手段17によって車載カメラ5の撮影映像から強風注意喚起用物体19を検出し、検出された強風注意喚起用物体19の外観に基づいて強風注意要否判定手段20による強風への注意の要否の判定を行い、この判定の結果、注意が必要である場合には、強風注意警告出力手段22によって強風への注意を促す警告を行うこと。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両運転支援装置に係り、特に、強風への注意が必要な地点における運転に好適な車両運転支援装置に関する。
【背景技術】
【0002】
一般に、トンネルの出口や橋の上など、強風の影響を特に受け易い地点には、ドライバーに強風への注意を喚起するために、吹き流しや、強風への注意を促す警告(例えば、「強風注意」または「横風注意」等の文字)を表示する警告板(換言すれば警告灯)が設置されている。しかし、ドライバーは、吹き流しの状態や警告板の表示状態を自主的に認識しない限りは、強風に備えた運転ができず、強風による横ずれ等の危険に晒される虞があった。
【0003】
そこで、このような危険を回避するための技術として、これまでにも、例えば、特許文献1に示すように、気象情報に基づいてトンネル出口で強風が吹いている情報が得られた場合には、「トンネル出口横風注意」の案内を行う車両用ナビゲーション装置が提案されていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−247299号公報
【特許文献2】特開2002−303527号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、風向きや風速は時々刻々と変化するものであり、所定時間ごとに配信される気象情報を頼りにした場合には、必ずしも現地の風の状態を適切に反映した案内を行うことができない場合があった。
【0006】
そこで、本発明は、このような点に鑑みなされたものであり、自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができ、ひいては、安全な運転を支援することができる車両運転支援装置を提供することを目的とするものである。
【課題を解決するための手段】
【0007】
前述した目的を達成するため、本発明に係る車両運転支援装置は、自車両に搭載され、前記自車両の周辺の所定の撮影領域を撮影可能とされた車載カメラと、この車載カメラの撮影映像から、強風への注意を運転者に喚起するために道路の周辺の所定の設置位置に設置された所定の物体であって当該設置位置の周辺の風の強さに応じた外観を呈する物体である強風注意喚起用物体を検出する物体検出手段と、この物体検出手段によって検出された前記強風注意喚起用物体の外観に基づいて強風への注意の要否を判定する強風注意要否判定手段と、この強風注意要否判定手段によって肯定的な判定結果が得られた場合に、強風への注意を促す警告を出力する強風注意警告出力手段とを備えたことを特徴としている。
【0008】
そして、このような構成によれば、物体検出手段によって車載カメラの撮影映像から強風注意喚起用物体を検出し、検出された強風注意喚起用物体の外観に基づいて強風注意要否判定手段による強風への注意の要否の判定を行い、この判定の結果、注意が必要である場合には、強風注意警告出力手段によって強風への注意を促す警告を確実に行うことができ、注意が不要な場合には、無用な警告を行わないようにすることができるので、自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができる。
【0009】
また、前記強風注意喚起用物体は、吹き流しを含んでもよい。
【0010】
そして、このような構成によれば、車載カメラの撮影映像から検出された吹き流しの外観に基づいて、強風注意要否判定手段による強風への注意の要否の判定を適切に行うことができるので、強風注意警告出力手段によって自車両が走行しようとしている地点の実際の風の状態をより適切に反映した強風への注意を促す警告を行うことができる。
【0011】
さらに、前記強風注意喚起用物体は、強風時において強風への注意を運転者に喚起するための警告を表示する警告板を含んでもよい。
【0012】
そして、このような構成によれば、車載カメラの撮影映像から検出された警告板の外観に基づいて、強風注意要否判定手段による強風への注意の要否の判定を適切に行うことができるので、強風注意警告出力手段によって自車両が走行しようとしている地点の実際の風の状態をさらに適切に反映した強風への注意を促す警告を行うことができる。
【0013】
さらにまた、前記強風注意要否判定手段に対して前記強風への注意の要否の判定に用いられる判定基準を設定する判定基準設定手段を備え、前記判定基準設定手段は、前記自車両の車両情報に基づいて、前記自車両が風の影響を受け易い車両であるほど前記強風注意要否判定手段によって肯定的な判定結果が得られ易くなるような前記判定基準を設定するようにしてもよい。
【0014】
そして、このような構成によれば、自車両が風の影響を受け易い車両であるほど強風注意要否判定手段によって肯定的な判定結果が得られ易くなるようにすることができるので、強風注意警告出力手段によって自車両の車両構造を適切に反映した強風への注意を促す警告を行うことができる。
【0015】
また、前記自車両の車両情報が記憶された車両情報記憶手段を備え、前記強風注意警告出力手段は、前記車両情報記憶手段に記憶された前記車両情報に基づいて、前記自車両が風の影響を受け易い車両であるほど前記警告の出力時期を早めるようにしてもよい。
【0016】
そして、このような構成によれば、自車両が風の影響を受け易い車両であるほど強風注意警告出力手段によって警告が早めに出力されるようにすることができるので、自車両の車両構造をより適切に反映した強風への注意を促す警告を行うことができる。
【0017】
さらに、前記自車両の周辺の所定の領域内に存在する他車両を検出する他車両検出手段と、前記強風注意要否判定手段によって肯定的な判定結果が得られた場合であって、前記他車両検出手段によって前記他車両が検出された場合に、強風による前記他車両との衝突を未然に回避するための走行方法の案内を出力する走行方法案内出力手段とを備えるようにしてもよい。
【0018】
そして、このような構成によれば、強風の影響によって他車両との衝突の可能性がある場合に、走行方法案内出力手段によって衝突を未然に回避するための走行方法を案内することができるので、強風への注意を要する地点における他車両の影響を考慮したより安全な走行を支援することができる。
【0019】
さらにまた、前記他車両検出手段によって検出された前記他車両が大型車であるか否かを判定する大型車判定手段を備え、前記走行方法案内出力手段は、前記大型車判定手段によって肯定的な判定結果が得られた場合に、前記走行方法の案内を出力するようにしてもよい。
【0020】
そして、このような構成によれば、他車両が大型車の場合にのみ走行方法案内出力手段による走行方法の案内を行うことができるので、無用な走行案内を防止してユーザの混乱を未然に回避することができる。
【発明の効果】
【0021】
本発明によれば、自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができ、ひいては、安全かつ円滑な運転を支援することができる
【図面の簡単な説明】
【0022】
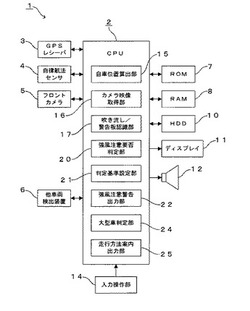
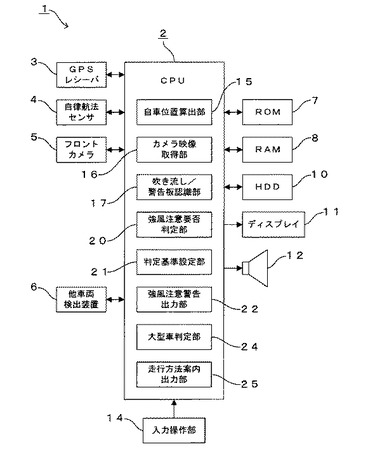
【図1】本発明に係る車両運転支援装置の実施形態を示すブロック図
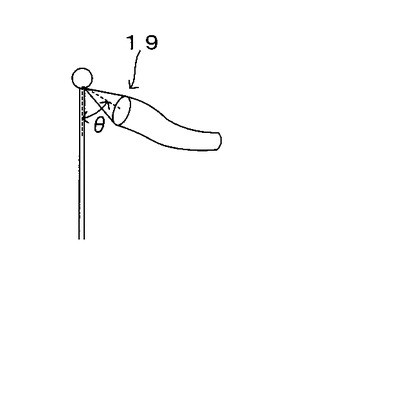
【図2】本発明に係る車両運転支援装置の実施形態において、吹き流しの一例を示す図
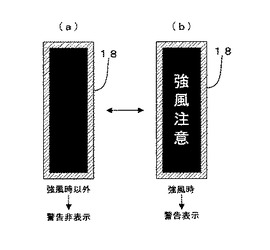
【図3】本発明に係る車両運転支援装置の実施形態において、警告板の一例を示す図
【図4】本発明に係る車両運転支援装置の実施形態において、強風注意要否判定の判定基準のデータテーブルの一例を示す図
【図5】本発明に係る車両運転支援装置の実施形態において、強風注意警告の出力時期のデータテーブルの一例を示す図
【図6】本発明に係る車両運転支援装置の実施形態を示すフローチャート
【発明を実施するための形態】
【0023】
以下、本発明に係る車両運転支援装置の実施形態について図1乃至図6を参照して説明する。
【0024】
図1に示すように、本実施形態における車両運転支援装置1は、大別して、CPU2と、このCPU2にそれぞれ接続されたGPSレシーバ3、自律航法センサ4、車載カメラとしてのフロントカメラ5、他車両検出装置6、ROM7、RAM8、ハードディスクドライブ(HDD)10、ディスプレイ11、スピーカ12および入力操作部14とによって構成されており、この車両運転支援装置1は、車載用ナビゲーション装置と一体の車載器をなしている。
【0025】
ここで、CPU2は、本実施形態における車両運転支援装置1の主制御部として機能して、種々の処理や制御を行うようになっている。
【0026】
GPSレシーバ3は、CPU2の制御の下で、図示しないGPS衛星から配信されるGPS情報(時刻や軌道に関する情報)を受信し、受信されたGPS情報をCPU2側に出力するようになっている。
【0027】
自律航法センサ4は、CPU2の制御の下で、自車両の加速度、車速および自車方位等を検出し、検出結果をCPU2側に出力するようになっている。この自律航法センサ4は、ジャイロセンサ等からなるものであってもよい。
【0028】
フロントメラ5は、自車両の前部(例えば、エンブレム部)にその光軸が自車両の前方を向くように取付けられており、このフロントカメラ5は、CPU2の制御の下で、自車両の前方の所定の撮影領域(視野角内の領域)を撮影し、撮影映像をCPU2側に出力するようになっている。このフロントカメラ5は、魚眼レンズ等の超広角レンズと、CCDやCMOS等の撮像素子とを備えた超広角カメラであってもよい。
【0029】
他車両検出装置6は、他車両検出手段として機能し、CPU2の制御の下で、自車両の周辺(例えば、左右両側方)の所定の領域内に存在する他車両を検出するようになっている。この他車両検出装置6は、自車両の左右両側方に存在する他車両をレーダによって検出する装置であってもよいし、また、自車両の左右両側方に存在する他車両を複数台の車載カメラ(例えば、サイドカメラ)の撮影映像に基づいて検出する装置であってもよい。
【0030】
ROM7には、CPU2の実行プログラムが記憶されており、CPU2は、この実行プログラムを実行することによって自らの主制御部としての機能を実行するようになっている。
【0031】
RAM8は、CPU2による処理結果等のデータの一時的な保存等に用いられるようになっている。
【0032】
ハードディスクドライブ10には、地図データが記憶されている。
【0033】
入力操作部14は、例えば、リモコンやディスプレイ11のタッチパネル等からなり、ユーザは、入力操作部14を用いて車両運転支援装置1に対する所定の入力操作を行うことが可能とされている。
【0034】
次に、CPU2について詳述すると、図1に示すように、CPU2は、その機能ブロックの1つとしての自車位置算出部15を有しており、この自車位置算出部15には、GPSレシーバ3から出力されたGPS情報および自律航法センサ4から出力された検出結果が入力されるようになっている。そして、自車位置算出部15は、GPSレシーバ3側から入力されたGPS情報に基づいて、自車位置を絶対座標として算出(検出)する衛星航法を行うようになっている。また、自車位置算出部15は、自律航法センサ4側から入力された検出結果に基づいて、自車位置を前回の測位位置からの変化分である相対位置として算出(検出)する自律航法を行うようになっている。さらに、自車位置算出部15は、ハードディスクドライブ10に記憶されている地図データを用いることによって、衛星航法または自律航法によって算出された自車位置を地図データにおける該当する道路上の位置に補正するマップマッチング処理を行うようになっている。そして、自車位置算出部15は、マップマッチング処理が適正に行われた場合には、マップマッチング処理後の自車位置を最終的な算出結果とするようになっている。
【0035】
また、CPU2は、その機能ブロックの1つとして、カメラ映像取得部16を有しており、このカメラ映像取得部16は、フロントカメラ5に対して撮影領域の撮影を要求し、この要求に応じて撮影された撮影映像をフロントカメラ5から取得するようになっている。
【0036】
さらに、CPU2は、その機能ブロックの1つとして、物体検出手段としての吹き流し/警告板認識部17を有しており、この吹き流し/警告板認識部17は、カメラ映像取得部16によって取得されたフロントカメラ5の撮影映像を、カメラ映像取得部16から入手するようになっている。そして、吹き流し/警告板認識部17は、入手されたフロントカメラ5の撮影映像から、強風への注意を運転者に喚起するために道路の周辺の所定の設置位置に設置された所定の物体であって当該設置位置の周辺の風の強さに応じた外観を呈する物体である強風注意喚起用物体として、吹き流しおよび警告板を画像認識によって検出するようになっている。
【0037】
ここで、図2に示すように、吹き流し19は、風向きや風の強さ(風速)を目視判断するためにトンネルの出口や橋の上等の風の通り道になっている場所に設置されているものであり、この吹き流し19は、風が強いほど図2に示す遊泳角θ〔°〕が図2における反時計回りに大きくなって最大角90〔°〕に近づくような外観を呈するようになっている。また、図3に示すように、警告板18は、強風時において、強風への注意を運転者に喚起するための警告が表示されるような外観を呈するようになっており(図3(b)参照)、強風時以外においては、警告は表示されないようになっている(図3(a)参照)。
【0038】
図1に戻って、CPU2は、その機能ブロックの1つとして、強風注意要否判定手段としての強風注意要否判定部20を有しており、この強風注意要否判定部20は、吹き流し/警告板認識部17によって検出された吹き流し19の画像または警告板18の画像を吹き流し/警告板認識部17から入手するようになっている。そして、強風注意要否判定部20は、入手された吹き流し19の画像から画像認識によって抽出された吹き流し19の外観としての遊泳角(図2参照)または入手された警告板18の画像から画像認識によって判断された警告板18上の警告の表示の有無(警告板18の外観)に基づいて、強風への注意の要否の判定である強風注意要否判定を行うようになっている。
【0039】
また、CPU2は、その機能ブロックの1つとして、判定基準設定手段としての判定基準設定部21を有している。判定基準設定部21は、強風注意要否判定部20に対して強風注意要否判定に用いられる判定基準を設定するようになっており、この設定された判定基準の下で、強風注意要否判定部20による強風注意要否判定が行われるようになっている。なお、判定基準設定部21によって設定される判定基準は、強風注意要否判定の判定結果が肯定的なものとなる場合における吹き流し19の遊泳角の閾値(下限値)や、警告板18によって警告が表示されている場合には強風注意要否判定の判定結果を肯定的なものとする旨等の基準となっている。なお、この判定基準設定部21による判定基準の設定は、例えば、判定基準設定用の操作画面をディスプレイ11に表示した上で、この操作画面に対する入力操作部14を用いた入力操作にともなって行うようにしてもよい。
【0040】
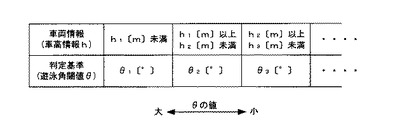
さらに、本実施形態において、判定基準設定部21は、自車両の車両情報に基づいて、自車両が風の影響を受け易い車両であるほど肯定的な強風注意要否判定の判定結果(すなわち、強風への注意が必要である旨の判定結果)が得られ易くなるような判定基準を設定するようになっている。なお、自車両の車両情報としては、自車両の車高、全長、車幅、重量および車種等の情報を挙げることができる。この車両情報は、判定基準設定用の操作画面に対する入力操作部14を用いた入力操作によって入力されるようにすればよい。例えば、判定基準設定部21は、自車両が相対的に車高の高い車両である場合における肯定的な強風注意要否判定の判定結果が得られるための吹き流し19の遊泳角の閾値が、自車両が相対的に車高の低い車両である場合における肯定的な強風注意要否判定の判定結果が得られるための吹き流し19の遊泳角の閾値よりも小さくなるような判定基準を設定するようになっている。このとき、図4に示すように、車両情報(図4においては車高情報h)と判定基準(図4においては吹き流し19の遊泳角θ)との対応関係が記述されたテーブルをROM7等の記憶部に保持しておき、判定基準設定部21は、入力操作部14から入力された車両情報に対応する判定基準を当該テーブルから抽出して強風注意要否判定部20に設定するようにしてもよい。但し、車重等の車高以外の車両情報も判定基準に加味されてよいことは勿論である。
【0041】
なお、警告板18に対応する判定基準については、車両情報にかかわらず警告板18上への警告の表示の有無のみを唯一の判断基準として固定しておけばよい。
【0042】
また、判定基準設定部21による判定基準の設定は、例えば、車両運転支援装置1の動作環境設定等の初期設定を行う際に初期設定項目の1つとして行うようにすればよい。
【0043】
さらにまた、本実施形態において、CPU2は、その機能ブロックの1つとして、強風注意警告出力手段としての強風注意警告出力部22を有しており、この強風注意警告出力部22は、強風注意要否判定部20によって肯定的な判定結果が得られた場合に、強風への注意を促す警告(以下、強風注意警告と称する)を出力するようになっている。
【0044】
この強風注意警告の出力は、例えば、「この先、強風に注意して下さい」もしくは「この先、横風に注意して下さい」といった警告メッセージをディスプレイ11に表示またはスピーカ12を介して音声出力することによって行うようにすればよい。
【0045】
このような構成によれば、吹き流し/警告板認識部17によってフロントカメラ5の撮影映像から検出された吹き流し19の遊泳角または警告板18の表示の有無に基づいて強風注意要否判定を行い、その判定結果が肯定的である場合には、強風注意警告出力部22による強風注意警告の出力を確実に行うことができ、その判定結果が否定的である場合には、無用な警告を行わないようにすることができるので、自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができる。また、吹き流し19の検出時において、自車両が風の影響を受け易い車両であるほど肯定的な強風注意要否判定の判定結果を得られ易くすることができるので、自車両の車両構造を適切に反映した強風への注意を促す警告を行うことができる。
【0046】
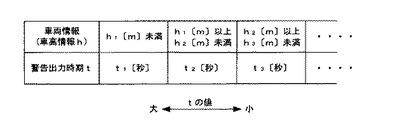
なお、ハードディスクドライブ10を車両情報記憶手段として機能させてハードディスクドライブ10に自車両の車両情報を記憶させておき、強風注意警告出力部22が、ハードディスクドライブ10に記憶された車両情報に基づいて、自車両が風の影響を受け易い車両であるほど強風注意警告の出力時期を早めるようにしてもよい。例えば、強風注意警告出力部22は、自車両が相対的に車高の高い車両である場合における強風注意警告の出力時期を、自車両が相対的に車高の低い車両である場合における強風注意警告の出力時期よりも早めるようにしてもよい。このとき、図5に示すように、車両情報(図5においては車高情報h)と強風注意警告の出力時期(図5においては、肯定的な強風注意要否判定の判定結果が得られた時点からの経過時間t)との対応関係が記述されたテーブルをROM7等の記憶部に保持しておき、強風注意警告出力部22は、このテーブルを用いて強風注意警告の出力時期を簡便に決定するようにしてもよい。但し、車重等の車高以外の車両情報も出力時期に加味されてよいことは勿論である。このように構成すれば、自車両が風の影響を受け易い車両であるほど強風注意警告を早めに出力することができるので、自車両の車両構造をより適切に反映した強風への注意を促す警告を行うことができる。
【0047】
また、CPU2は、その機能ブロックの1つとして、大型車判定手段としての大型車判定部24を有しており、この大型車判定部24は、他車両検出装置6から他車両の検出結果を取得するようになっている。そして、大型車判定部24は、他車両検出装置6によって他車両が検出された場合には、この検出された他車両が大型車であるか否かの判定を行うようになっている。なお、この判定は、レーダや車載カメラによって検出された他車両の像が、車高に相当する方向および全長に相当する方向に所定の大きさ以上の大きさを有しているか否か等の判定基準に基づいて行うようにすればよい。
【0048】
さらに、CPU2は、その機能ブロックの1つとして、走行方法案内出力手段としての走行方法案内出力部25を有している。この走行方法案内出力部25は、強風注意要否判定部20によって肯定的な判定結果が得られ、かつ、他車両検出装置6によって他車両が検出され、さらに、この検出された他車両について大型車判定部24による肯定的な判定結果が得られた場合に、強風による当該他車両との衝突を未然に回避するための走行方法の案内(以下、走行方法案内と称する)を出力するようになっている。この走行方法案内は、自車両に対する他車両の走行位置(走行車線)を考慮した上で、他車両の横ずれによる自車両への衝突を回避することができるような案内であり、他車両の位置に応じて案内の態様が異なるものである。例えば、日本の道路において、大型車(他車両)が自車両の左側方に検出された場合すなわち大型車が自車両の走行車線の直近の左側の車線を走行している場合には、走行方法案内出力部25は、「前方の安全を確認のうえ、加速して前進して下さい」あるいは「右後方の安全を確認のうえ、右側の車線に車線変更して下さい」(但し、自車両の走行車線の右側に車線が存在する場合に限る)といった案内メッセージをディスプレイ11に表示またはスピーカ12を介して音声出力することによって走行方法案内を出力すればよい。また、日本の道路において、大型車が自車両の右側方に検出された場合すなわち大型車が自車両の走行車線の直近の右側の車線を走行している場合には、走行方法案内出力部25は、「後方の安全を確認のうえ、減速して後退して下さい」あるいは「左後方の安全を確認のうえ、左側の車線に車線変更して下さい」(但し、自車両の走行車線の左側に車線が存在する場合に限る)といった案内メッセージをディスプレイ11に表示またはスピーカ12を介して音声出力することによって走行方法案内を出力すればよい。このとき、走行方法案内と大型車の位置(車線情報を含めても良い)との対応関係が記述されたテーブルをROM7等の記憶部に保持しておき、走行方法案内出力部25は、このテーブルを用いて出力すべき走行方法案内の態様を簡便に決定するようにしてもよい。なお、走行方法案内において自車両に車線変更を促す場合には、変更すべき車線の存在を確認することが前提となるが、このような車線の確認は、車載カメラによる白線検出等の公知の技術を用いて行うようにすればよい。
【0049】
このような構成によれば、強風の影響によって大型車との衝突の可能性がある場合に、走行方法案内出力部25によって走行方法案内を出力することができるので、強風への注意を要する地点における大型車の影響を考慮したより安全な走行を支援することができる。
【0050】
なお、地図データ中に吹き流し19や警告板18の設置位置のデータを地図データと対応させた状態で格納しておくことができるのであれば、CPU2は、自車位置算出部15によって算出された自車位置が、吹き流し19または警告板18の設置位置までの走行距離が所定距離となる地点にマッチングされた際に、フロントカメラ5および他車両検出装置6を起動するようにしてもよい。そして、強風注意要否判定部20による1回分の強風注意要否判定の後には、フロントカメラ5を停止し、大型車判定部24による1回分の判定の後には、他車両検出部6を停止するようにしてもよい。このようにすれば、フロントカメラ5および他車両検出装置6を必要時にのみ起動することができるので、電力消費量を削減することができる。
【0051】
次に、本実施形態の作用について説明する。
【0052】
なお、便宜上、初期状態においては、自車両が道路上を走行しており、車両運転支援装置1のアルゴリズムは起動されているものとする。
【0053】
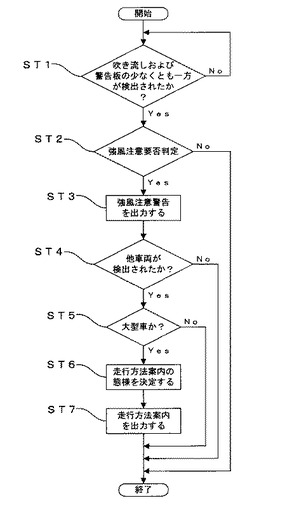
そして、初期状態から、まず、図6のステップ1(ST1)においては、強風注意要否判定部20により、フロントカメラ5の撮影映像から吹き流し/警告板認識部17によって吹き流し19および警告板18の少なくとも一方が検出されたか否かを判定し、検出された場合にはステップ2(ST2)に進み、検出されていない場合には、ステップ1(ST1)を繰り返す。
【0054】
次いで、ステップ2(ST2)においては、強風注意要否判定部20により、ステップ1(ST1)において検出された吹き流し19の遊泳角または警告板18の表示状態に基づいて強風注意要否判定を行い、この強風注意要否判定において肯定的な判定結果が得られた場合にはステップ3(ST3)に進み、否定的な判定結果が得られた場合には処理を終了する。なお、ステップ1(ST1)において、吹き流し19と警告板18との双方が同時期に検出されたような場合には、いずれか一方の外観が肯定的な判定基準を満たすのであれば、ステップ3(ST3)に進むことが安全上好ましい。
【0055】
次いで、ステップ3(ST3)においては、強風注意警告出力部22によって強風注意警告を出力する。
【0056】
次いで、ステップ4(ST4)においては、走行方法案内出力部25により、他車両検出装置6によって他車両が検出されたか否かを判定し、検出された場合には、ステップ5(ST5)に進み、検出されなかった場合には処理を終了する。
【0057】
次いで、ステップ5(ST5)においては、走行方法案内出力部25により、ステップ4(ST4)において検出された他車両が大型車であるか否かを判定し、大型車である場合にはステップ6(ST6)に進み、大型車でない場合には処理を終了する。
【0058】
次いで、ステップ6(ST6)においては、走行方法案内出力部25により、大型車の検出方向や道路の車線情報等を考慮することによって、出力すべき走行方法案内の態様を決定する。
【0059】
次いで、ステップ7(ST7)においては、走行方法案内出力部25により、ステップ6(ST6)において決定された態様の走行方法案内を出力して処理を終了する。
【0060】
以上述べたように、本実施形態によれば、強風注意警告出力部22により、自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができ、ひいては、安全かつ円滑な運転を支援することができる。
【符号の説明】
【0061】
1 車両運転支援装置
5 フロントカメラ
6 他車両検出装置
17 吹き流し/警告板認識部
19 吹き流し
20 強風注意要否判定部
22 強風注意警告出力部
【技術分野】
【0001】
本発明は、車両運転支援装置に係り、特に、強風への注意が必要な地点における運転に好適な車両運転支援装置に関する。
【背景技術】
【0002】
一般に、トンネルの出口や橋の上など、強風の影響を特に受け易い地点には、ドライバーに強風への注意を喚起するために、吹き流しや、強風への注意を促す警告(例えば、「強風注意」または「横風注意」等の文字)を表示する警告板(換言すれば警告灯)が設置されている。しかし、ドライバーは、吹き流しの状態や警告板の表示状態を自主的に認識しない限りは、強風に備えた運転ができず、強風による横ずれ等の危険に晒される虞があった。
【0003】
そこで、このような危険を回避するための技術として、これまでにも、例えば、特許文献1に示すように、気象情報に基づいてトンネル出口で強風が吹いている情報が得られた場合には、「トンネル出口横風注意」の案内を行う車両用ナビゲーション装置が提案されていた。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平10−247299号公報
【特許文献2】特開2002−303527号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、風向きや風速は時々刻々と変化するものであり、所定時間ごとに配信される気象情報を頼りにした場合には、必ずしも現地の風の状態を適切に反映した案内を行うことができない場合があった。
【0006】
そこで、本発明は、このような点に鑑みなされたものであり、自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができ、ひいては、安全な運転を支援することができる車両運転支援装置を提供することを目的とするものである。
【課題を解決するための手段】
【0007】
前述した目的を達成するため、本発明に係る車両運転支援装置は、自車両に搭載され、前記自車両の周辺の所定の撮影領域を撮影可能とされた車載カメラと、この車載カメラの撮影映像から、強風への注意を運転者に喚起するために道路の周辺の所定の設置位置に設置された所定の物体であって当該設置位置の周辺の風の強さに応じた外観を呈する物体である強風注意喚起用物体を検出する物体検出手段と、この物体検出手段によって検出された前記強風注意喚起用物体の外観に基づいて強風への注意の要否を判定する強風注意要否判定手段と、この強風注意要否判定手段によって肯定的な判定結果が得られた場合に、強風への注意を促す警告を出力する強風注意警告出力手段とを備えたことを特徴としている。
【0008】
そして、このような構成によれば、物体検出手段によって車載カメラの撮影映像から強風注意喚起用物体を検出し、検出された強風注意喚起用物体の外観に基づいて強風注意要否判定手段による強風への注意の要否の判定を行い、この判定の結果、注意が必要である場合には、強風注意警告出力手段によって強風への注意を促す警告を確実に行うことができ、注意が不要な場合には、無用な警告を行わないようにすることができるので、自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができる。
【0009】
また、前記強風注意喚起用物体は、吹き流しを含んでもよい。
【0010】
そして、このような構成によれば、車載カメラの撮影映像から検出された吹き流しの外観に基づいて、強風注意要否判定手段による強風への注意の要否の判定を適切に行うことができるので、強風注意警告出力手段によって自車両が走行しようとしている地点の実際の風の状態をより適切に反映した強風への注意を促す警告を行うことができる。
【0011】
さらに、前記強風注意喚起用物体は、強風時において強風への注意を運転者に喚起するための警告を表示する警告板を含んでもよい。
【0012】
そして、このような構成によれば、車載カメラの撮影映像から検出された警告板の外観に基づいて、強風注意要否判定手段による強風への注意の要否の判定を適切に行うことができるので、強風注意警告出力手段によって自車両が走行しようとしている地点の実際の風の状態をさらに適切に反映した強風への注意を促す警告を行うことができる。
【0013】
さらにまた、前記強風注意要否判定手段に対して前記強風への注意の要否の判定に用いられる判定基準を設定する判定基準設定手段を備え、前記判定基準設定手段は、前記自車両の車両情報に基づいて、前記自車両が風の影響を受け易い車両であるほど前記強風注意要否判定手段によって肯定的な判定結果が得られ易くなるような前記判定基準を設定するようにしてもよい。
【0014】
そして、このような構成によれば、自車両が風の影響を受け易い車両であるほど強風注意要否判定手段によって肯定的な判定結果が得られ易くなるようにすることができるので、強風注意警告出力手段によって自車両の車両構造を適切に反映した強風への注意を促す警告を行うことができる。
【0015】
また、前記自車両の車両情報が記憶された車両情報記憶手段を備え、前記強風注意警告出力手段は、前記車両情報記憶手段に記憶された前記車両情報に基づいて、前記自車両が風の影響を受け易い車両であるほど前記警告の出力時期を早めるようにしてもよい。
【0016】
そして、このような構成によれば、自車両が風の影響を受け易い車両であるほど強風注意警告出力手段によって警告が早めに出力されるようにすることができるので、自車両の車両構造をより適切に反映した強風への注意を促す警告を行うことができる。
【0017】
さらに、前記自車両の周辺の所定の領域内に存在する他車両を検出する他車両検出手段と、前記強風注意要否判定手段によって肯定的な判定結果が得られた場合であって、前記他車両検出手段によって前記他車両が検出された場合に、強風による前記他車両との衝突を未然に回避するための走行方法の案内を出力する走行方法案内出力手段とを備えるようにしてもよい。
【0018】
そして、このような構成によれば、強風の影響によって他車両との衝突の可能性がある場合に、走行方法案内出力手段によって衝突を未然に回避するための走行方法を案内することができるので、強風への注意を要する地点における他車両の影響を考慮したより安全な走行を支援することができる。
【0019】
さらにまた、前記他車両検出手段によって検出された前記他車両が大型車であるか否かを判定する大型車判定手段を備え、前記走行方法案内出力手段は、前記大型車判定手段によって肯定的な判定結果が得られた場合に、前記走行方法の案内を出力するようにしてもよい。
【0020】
そして、このような構成によれば、他車両が大型車の場合にのみ走行方法案内出力手段による走行方法の案内を行うことができるので、無用な走行案内を防止してユーザの混乱を未然に回避することができる。
【発明の効果】
【0021】
本発明によれば、自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができ、ひいては、安全かつ円滑な運転を支援することができる
【図面の簡単な説明】
【0022】
【図1】本発明に係る車両運転支援装置の実施形態を示すブロック図
【図2】本発明に係る車両運転支援装置の実施形態において、吹き流しの一例を示す図
【図3】本発明に係る車両運転支援装置の実施形態において、警告板の一例を示す図
【図4】本発明に係る車両運転支援装置の実施形態において、強風注意要否判定の判定基準のデータテーブルの一例を示す図
【図5】本発明に係る車両運転支援装置の実施形態において、強風注意警告の出力時期のデータテーブルの一例を示す図
【図6】本発明に係る車両運転支援装置の実施形態を示すフローチャート
【発明を実施するための形態】
【0023】
以下、本発明に係る車両運転支援装置の実施形態について図1乃至図6を参照して説明する。
【0024】
図1に示すように、本実施形態における車両運転支援装置1は、大別して、CPU2と、このCPU2にそれぞれ接続されたGPSレシーバ3、自律航法センサ4、車載カメラとしてのフロントカメラ5、他車両検出装置6、ROM7、RAM8、ハードディスクドライブ(HDD)10、ディスプレイ11、スピーカ12および入力操作部14とによって構成されており、この車両運転支援装置1は、車載用ナビゲーション装置と一体の車載器をなしている。
【0025】
ここで、CPU2は、本実施形態における車両運転支援装置1の主制御部として機能して、種々の処理や制御を行うようになっている。
【0026】
GPSレシーバ3は、CPU2の制御の下で、図示しないGPS衛星から配信されるGPS情報(時刻や軌道に関する情報)を受信し、受信されたGPS情報をCPU2側に出力するようになっている。
【0027】
自律航法センサ4は、CPU2の制御の下で、自車両の加速度、車速および自車方位等を検出し、検出結果をCPU2側に出力するようになっている。この自律航法センサ4は、ジャイロセンサ等からなるものであってもよい。
【0028】
フロントメラ5は、自車両の前部(例えば、エンブレム部)にその光軸が自車両の前方を向くように取付けられており、このフロントカメラ5は、CPU2の制御の下で、自車両の前方の所定の撮影領域(視野角内の領域)を撮影し、撮影映像をCPU2側に出力するようになっている。このフロントカメラ5は、魚眼レンズ等の超広角レンズと、CCDやCMOS等の撮像素子とを備えた超広角カメラであってもよい。
【0029】
他車両検出装置6は、他車両検出手段として機能し、CPU2の制御の下で、自車両の周辺(例えば、左右両側方)の所定の領域内に存在する他車両を検出するようになっている。この他車両検出装置6は、自車両の左右両側方に存在する他車両をレーダによって検出する装置であってもよいし、また、自車両の左右両側方に存在する他車両を複数台の車載カメラ(例えば、サイドカメラ)の撮影映像に基づいて検出する装置であってもよい。
【0030】
ROM7には、CPU2の実行プログラムが記憶されており、CPU2は、この実行プログラムを実行することによって自らの主制御部としての機能を実行するようになっている。
【0031】
RAM8は、CPU2による処理結果等のデータの一時的な保存等に用いられるようになっている。
【0032】
ハードディスクドライブ10には、地図データが記憶されている。
【0033】
入力操作部14は、例えば、リモコンやディスプレイ11のタッチパネル等からなり、ユーザは、入力操作部14を用いて車両運転支援装置1に対する所定の入力操作を行うことが可能とされている。
【0034】
次に、CPU2について詳述すると、図1に示すように、CPU2は、その機能ブロックの1つとしての自車位置算出部15を有しており、この自車位置算出部15には、GPSレシーバ3から出力されたGPS情報および自律航法センサ4から出力された検出結果が入力されるようになっている。そして、自車位置算出部15は、GPSレシーバ3側から入力されたGPS情報に基づいて、自車位置を絶対座標として算出(検出)する衛星航法を行うようになっている。また、自車位置算出部15は、自律航法センサ4側から入力された検出結果に基づいて、自車位置を前回の測位位置からの変化分である相対位置として算出(検出)する自律航法を行うようになっている。さらに、自車位置算出部15は、ハードディスクドライブ10に記憶されている地図データを用いることによって、衛星航法または自律航法によって算出された自車位置を地図データにおける該当する道路上の位置に補正するマップマッチング処理を行うようになっている。そして、自車位置算出部15は、マップマッチング処理が適正に行われた場合には、マップマッチング処理後の自車位置を最終的な算出結果とするようになっている。
【0035】
また、CPU2は、その機能ブロックの1つとして、カメラ映像取得部16を有しており、このカメラ映像取得部16は、フロントカメラ5に対して撮影領域の撮影を要求し、この要求に応じて撮影された撮影映像をフロントカメラ5から取得するようになっている。
【0036】
さらに、CPU2は、その機能ブロックの1つとして、物体検出手段としての吹き流し/警告板認識部17を有しており、この吹き流し/警告板認識部17は、カメラ映像取得部16によって取得されたフロントカメラ5の撮影映像を、カメラ映像取得部16から入手するようになっている。そして、吹き流し/警告板認識部17は、入手されたフロントカメラ5の撮影映像から、強風への注意を運転者に喚起するために道路の周辺の所定の設置位置に設置された所定の物体であって当該設置位置の周辺の風の強さに応じた外観を呈する物体である強風注意喚起用物体として、吹き流しおよび警告板を画像認識によって検出するようになっている。
【0037】
ここで、図2に示すように、吹き流し19は、風向きや風の強さ(風速)を目視判断するためにトンネルの出口や橋の上等の風の通り道になっている場所に設置されているものであり、この吹き流し19は、風が強いほど図2に示す遊泳角θ〔°〕が図2における反時計回りに大きくなって最大角90〔°〕に近づくような外観を呈するようになっている。また、図3に示すように、警告板18は、強風時において、強風への注意を運転者に喚起するための警告が表示されるような外観を呈するようになっており(図3(b)参照)、強風時以外においては、警告は表示されないようになっている(図3(a)参照)。
【0038】
図1に戻って、CPU2は、その機能ブロックの1つとして、強風注意要否判定手段としての強風注意要否判定部20を有しており、この強風注意要否判定部20は、吹き流し/警告板認識部17によって検出された吹き流し19の画像または警告板18の画像を吹き流し/警告板認識部17から入手するようになっている。そして、強風注意要否判定部20は、入手された吹き流し19の画像から画像認識によって抽出された吹き流し19の外観としての遊泳角(図2参照)または入手された警告板18の画像から画像認識によって判断された警告板18上の警告の表示の有無(警告板18の外観)に基づいて、強風への注意の要否の判定である強風注意要否判定を行うようになっている。
【0039】
また、CPU2は、その機能ブロックの1つとして、判定基準設定手段としての判定基準設定部21を有している。判定基準設定部21は、強風注意要否判定部20に対して強風注意要否判定に用いられる判定基準を設定するようになっており、この設定された判定基準の下で、強風注意要否判定部20による強風注意要否判定が行われるようになっている。なお、判定基準設定部21によって設定される判定基準は、強風注意要否判定の判定結果が肯定的なものとなる場合における吹き流し19の遊泳角の閾値(下限値)や、警告板18によって警告が表示されている場合には強風注意要否判定の判定結果を肯定的なものとする旨等の基準となっている。なお、この判定基準設定部21による判定基準の設定は、例えば、判定基準設定用の操作画面をディスプレイ11に表示した上で、この操作画面に対する入力操作部14を用いた入力操作にともなって行うようにしてもよい。
【0040】
さらに、本実施形態において、判定基準設定部21は、自車両の車両情報に基づいて、自車両が風の影響を受け易い車両であるほど肯定的な強風注意要否判定の判定結果(すなわち、強風への注意が必要である旨の判定結果)が得られ易くなるような判定基準を設定するようになっている。なお、自車両の車両情報としては、自車両の車高、全長、車幅、重量および車種等の情報を挙げることができる。この車両情報は、判定基準設定用の操作画面に対する入力操作部14を用いた入力操作によって入力されるようにすればよい。例えば、判定基準設定部21は、自車両が相対的に車高の高い車両である場合における肯定的な強風注意要否判定の判定結果が得られるための吹き流し19の遊泳角の閾値が、自車両が相対的に車高の低い車両である場合における肯定的な強風注意要否判定の判定結果が得られるための吹き流し19の遊泳角の閾値よりも小さくなるような判定基準を設定するようになっている。このとき、図4に示すように、車両情報(図4においては車高情報h)と判定基準(図4においては吹き流し19の遊泳角θ)との対応関係が記述されたテーブルをROM7等の記憶部に保持しておき、判定基準設定部21は、入力操作部14から入力された車両情報に対応する判定基準を当該テーブルから抽出して強風注意要否判定部20に設定するようにしてもよい。但し、車重等の車高以外の車両情報も判定基準に加味されてよいことは勿論である。
【0041】
なお、警告板18に対応する判定基準については、車両情報にかかわらず警告板18上への警告の表示の有無のみを唯一の判断基準として固定しておけばよい。
【0042】
また、判定基準設定部21による判定基準の設定は、例えば、車両運転支援装置1の動作環境設定等の初期設定を行う際に初期設定項目の1つとして行うようにすればよい。
【0043】
さらにまた、本実施形態において、CPU2は、その機能ブロックの1つとして、強風注意警告出力手段としての強風注意警告出力部22を有しており、この強風注意警告出力部22は、強風注意要否判定部20によって肯定的な判定結果が得られた場合に、強風への注意を促す警告(以下、強風注意警告と称する)を出力するようになっている。
【0044】
この強風注意警告の出力は、例えば、「この先、強風に注意して下さい」もしくは「この先、横風に注意して下さい」といった警告メッセージをディスプレイ11に表示またはスピーカ12を介して音声出力することによって行うようにすればよい。
【0045】
このような構成によれば、吹き流し/警告板認識部17によってフロントカメラ5の撮影映像から検出された吹き流し19の遊泳角または警告板18の表示の有無に基づいて強風注意要否判定を行い、その判定結果が肯定的である場合には、強風注意警告出力部22による強風注意警告の出力を確実に行うことができ、その判定結果が否定的である場合には、無用な警告を行わないようにすることができるので、自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができる。また、吹き流し19の検出時において、自車両が風の影響を受け易い車両であるほど肯定的な強風注意要否判定の判定結果を得られ易くすることができるので、自車両の車両構造を適切に反映した強風への注意を促す警告を行うことができる。
【0046】
なお、ハードディスクドライブ10を車両情報記憶手段として機能させてハードディスクドライブ10に自車両の車両情報を記憶させておき、強風注意警告出力部22が、ハードディスクドライブ10に記憶された車両情報に基づいて、自車両が風の影響を受け易い車両であるほど強風注意警告の出力時期を早めるようにしてもよい。例えば、強風注意警告出力部22は、自車両が相対的に車高の高い車両である場合における強風注意警告の出力時期を、自車両が相対的に車高の低い車両である場合における強風注意警告の出力時期よりも早めるようにしてもよい。このとき、図5に示すように、車両情報(図5においては車高情報h)と強風注意警告の出力時期(図5においては、肯定的な強風注意要否判定の判定結果が得られた時点からの経過時間t)との対応関係が記述されたテーブルをROM7等の記憶部に保持しておき、強風注意警告出力部22は、このテーブルを用いて強風注意警告の出力時期を簡便に決定するようにしてもよい。但し、車重等の車高以外の車両情報も出力時期に加味されてよいことは勿論である。このように構成すれば、自車両が風の影響を受け易い車両であるほど強風注意警告を早めに出力することができるので、自車両の車両構造をより適切に反映した強風への注意を促す警告を行うことができる。
【0047】
また、CPU2は、その機能ブロックの1つとして、大型車判定手段としての大型車判定部24を有しており、この大型車判定部24は、他車両検出装置6から他車両の検出結果を取得するようになっている。そして、大型車判定部24は、他車両検出装置6によって他車両が検出された場合には、この検出された他車両が大型車であるか否かの判定を行うようになっている。なお、この判定は、レーダや車載カメラによって検出された他車両の像が、車高に相当する方向および全長に相当する方向に所定の大きさ以上の大きさを有しているか否か等の判定基準に基づいて行うようにすればよい。
【0048】
さらに、CPU2は、その機能ブロックの1つとして、走行方法案内出力手段としての走行方法案内出力部25を有している。この走行方法案内出力部25は、強風注意要否判定部20によって肯定的な判定結果が得られ、かつ、他車両検出装置6によって他車両が検出され、さらに、この検出された他車両について大型車判定部24による肯定的な判定結果が得られた場合に、強風による当該他車両との衝突を未然に回避するための走行方法の案内(以下、走行方法案内と称する)を出力するようになっている。この走行方法案内は、自車両に対する他車両の走行位置(走行車線)を考慮した上で、他車両の横ずれによる自車両への衝突を回避することができるような案内であり、他車両の位置に応じて案内の態様が異なるものである。例えば、日本の道路において、大型車(他車両)が自車両の左側方に検出された場合すなわち大型車が自車両の走行車線の直近の左側の車線を走行している場合には、走行方法案内出力部25は、「前方の安全を確認のうえ、加速して前進して下さい」あるいは「右後方の安全を確認のうえ、右側の車線に車線変更して下さい」(但し、自車両の走行車線の右側に車線が存在する場合に限る)といった案内メッセージをディスプレイ11に表示またはスピーカ12を介して音声出力することによって走行方法案内を出力すればよい。また、日本の道路において、大型車が自車両の右側方に検出された場合すなわち大型車が自車両の走行車線の直近の右側の車線を走行している場合には、走行方法案内出力部25は、「後方の安全を確認のうえ、減速して後退して下さい」あるいは「左後方の安全を確認のうえ、左側の車線に車線変更して下さい」(但し、自車両の走行車線の左側に車線が存在する場合に限る)といった案内メッセージをディスプレイ11に表示またはスピーカ12を介して音声出力することによって走行方法案内を出力すればよい。このとき、走行方法案内と大型車の位置(車線情報を含めても良い)との対応関係が記述されたテーブルをROM7等の記憶部に保持しておき、走行方法案内出力部25は、このテーブルを用いて出力すべき走行方法案内の態様を簡便に決定するようにしてもよい。なお、走行方法案内において自車両に車線変更を促す場合には、変更すべき車線の存在を確認することが前提となるが、このような車線の確認は、車載カメラによる白線検出等の公知の技術を用いて行うようにすればよい。
【0049】
このような構成によれば、強風の影響によって大型車との衝突の可能性がある場合に、走行方法案内出力部25によって走行方法案内を出力することができるので、強風への注意を要する地点における大型車の影響を考慮したより安全な走行を支援することができる。
【0050】
なお、地図データ中に吹き流し19や警告板18の設置位置のデータを地図データと対応させた状態で格納しておくことができるのであれば、CPU2は、自車位置算出部15によって算出された自車位置が、吹き流し19または警告板18の設置位置までの走行距離が所定距離となる地点にマッチングされた際に、フロントカメラ5および他車両検出装置6を起動するようにしてもよい。そして、強風注意要否判定部20による1回分の強風注意要否判定の後には、フロントカメラ5を停止し、大型車判定部24による1回分の判定の後には、他車両検出部6を停止するようにしてもよい。このようにすれば、フロントカメラ5および他車両検出装置6を必要時にのみ起動することができるので、電力消費量を削減することができる。
【0051】
次に、本実施形態の作用について説明する。
【0052】
なお、便宜上、初期状態においては、自車両が道路上を走行しており、車両運転支援装置1のアルゴリズムは起動されているものとする。
【0053】
そして、初期状態から、まず、図6のステップ1(ST1)においては、強風注意要否判定部20により、フロントカメラ5の撮影映像から吹き流し/警告板認識部17によって吹き流し19および警告板18の少なくとも一方が検出されたか否かを判定し、検出された場合にはステップ2(ST2)に進み、検出されていない場合には、ステップ1(ST1)を繰り返す。
【0054】
次いで、ステップ2(ST2)においては、強風注意要否判定部20により、ステップ1(ST1)において検出された吹き流し19の遊泳角または警告板18の表示状態に基づいて強風注意要否判定を行い、この強風注意要否判定において肯定的な判定結果が得られた場合にはステップ3(ST3)に進み、否定的な判定結果が得られた場合には処理を終了する。なお、ステップ1(ST1)において、吹き流し19と警告板18との双方が同時期に検出されたような場合には、いずれか一方の外観が肯定的な判定基準を満たすのであれば、ステップ3(ST3)に進むことが安全上好ましい。
【0055】
次いで、ステップ3(ST3)においては、強風注意警告出力部22によって強風注意警告を出力する。
【0056】
次いで、ステップ4(ST4)においては、走行方法案内出力部25により、他車両検出装置6によって他車両が検出されたか否かを判定し、検出された場合には、ステップ5(ST5)に進み、検出されなかった場合には処理を終了する。
【0057】
次いで、ステップ5(ST5)においては、走行方法案内出力部25により、ステップ4(ST4)において検出された他車両が大型車であるか否かを判定し、大型車である場合にはステップ6(ST6)に進み、大型車でない場合には処理を終了する。
【0058】
次いで、ステップ6(ST6)においては、走行方法案内出力部25により、大型車の検出方向や道路の車線情報等を考慮することによって、出力すべき走行方法案内の態様を決定する。
【0059】
次いで、ステップ7(ST7)においては、走行方法案内出力部25により、ステップ6(ST6)において決定された態様の走行方法案内を出力して処理を終了する。
【0060】
以上述べたように、本実施形態によれば、強風注意警告出力部22により、自車両が走行しようとしている地点の実際の風の状態を適切に反映した信頼性が高い強風への注意を促す警告を行うことができ、ひいては、安全かつ円滑な運転を支援することができる。
【符号の説明】
【0061】
1 車両運転支援装置
5 フロントカメラ
6 他車両検出装置
17 吹き流し/警告板認識部
19 吹き流し
20 強風注意要否判定部
22 強風注意警告出力部
【特許請求の範囲】
【請求項1】
自車両に搭載され、前記自車両の周辺の所定の撮影領域を撮影可能とされた車載カメラと、
この車載カメラの撮影映像から、強風への注意を運転者に喚起するために道路の周辺の所定の設置位置に設置された所定の物体であって当該設置位置の周辺の風の強さに応じた外観を呈する物体である強風注意喚起用物体を検出する物体検出手段と、
この物体検出手段によって検出された前記強風注意喚起用物体の外観に基づいて強風への注意の要否を判定する強風注意要否判定手段と、
この強風注意要否判定手段によって肯定的な判定結果が得られた場合に、強風への注意を促す警告を出力する強風注意警告出力手段と
を備えたことを特徴とする車両運転支援装置。
【請求項2】
前記強風注意喚起用物体は、吹き流しを含むこと
を特徴とする請求項1に記載の車両運転支援装置。
【請求項3】
前記強風注意喚起用物体は、強風時において強風への注意を運転者に喚起するための警告を表示する警告板を含むこと
を特徴とする請求項1または請求項2に記載の車両運転支援装置。
【請求項4】
前記強風注意要否判定手段に対して前記強風への注意の要否の判定に用いられる判定基準を設定する判定基準設定手段を備え、
前記判定基準設定手段は、前記自車両の車両情報に基づいて、前記自車両が風の影響を受け易い車両であるほど前記強風注意要否判定手段によって肯定的な判定結果が得られ易くなるような前記判定基準を設定すること
を特徴とする請求項1または請求項2に記載の車両運転支援装置。
【請求項5】
前記自車両の車両情報が記憶された車両情報記憶手段を備え、
前記強風注意警告出力手段は、前記車両情報記憶手段に記憶された前記車両情報に基づいて、前記自車両が風の影響を受け易い車両であるほど前記警告の出力時期を早めること
を特徴とする請求項1乃至請求項4のいずれか1項に記載の車両運転支援装置。
【請求項6】
前記自車両の周辺の所定の領域内に存在する他車両を検出する他車両検出手段と、
前記強風注意要否判定手段によって肯定的な判定結果が得られた場合であって、前記他車両検出手段によって前記他車両が検出された場合に、強風による前記他車両との衝突を未然に回避するための走行方法の案内を出力する走行方法案内出力手段と
を備えたことを特徴とする請求項1乃至請求項5のいずれか1項に記載の車両運転支援装置。
【請求項7】
前記他車両検出手段によって検出された前記他車両が大型車であるか否かを判定する大型車判定手段を備え、
前記走行方法案内出力手段は、前記大型車判定手段によって肯定的な判定結果が得られた場合に、前記走行方法の案内を出力すること
を特徴とする請求項6に記載の車両運転支援装置。
【請求項1】
自車両に搭載され、前記自車両の周辺の所定の撮影領域を撮影可能とされた車載カメラと、
この車載カメラの撮影映像から、強風への注意を運転者に喚起するために道路の周辺の所定の設置位置に設置された所定の物体であって当該設置位置の周辺の風の強さに応じた外観を呈する物体である強風注意喚起用物体を検出する物体検出手段と、
この物体検出手段によって検出された前記強風注意喚起用物体の外観に基づいて強風への注意の要否を判定する強風注意要否判定手段と、
この強風注意要否判定手段によって肯定的な判定結果が得られた場合に、強風への注意を促す警告を出力する強風注意警告出力手段と
を備えたことを特徴とする車両運転支援装置。
【請求項2】
前記強風注意喚起用物体は、吹き流しを含むこと
を特徴とする請求項1に記載の車両運転支援装置。
【請求項3】
前記強風注意喚起用物体は、強風時において強風への注意を運転者に喚起するための警告を表示する警告板を含むこと
を特徴とする請求項1または請求項2に記載の車両運転支援装置。
【請求項4】
前記強風注意要否判定手段に対して前記強風への注意の要否の判定に用いられる判定基準を設定する判定基準設定手段を備え、
前記判定基準設定手段は、前記自車両の車両情報に基づいて、前記自車両が風の影響を受け易い車両であるほど前記強風注意要否判定手段によって肯定的な判定結果が得られ易くなるような前記判定基準を設定すること
を特徴とする請求項1または請求項2に記載の車両運転支援装置。
【請求項5】
前記自車両の車両情報が記憶された車両情報記憶手段を備え、
前記強風注意警告出力手段は、前記車両情報記憶手段に記憶された前記車両情報に基づいて、前記自車両が風の影響を受け易い車両であるほど前記警告の出力時期を早めること
を特徴とする請求項1乃至請求項4のいずれか1項に記載の車両運転支援装置。
【請求項6】
前記自車両の周辺の所定の領域内に存在する他車両を検出する他車両検出手段と、
前記強風注意要否判定手段によって肯定的な判定結果が得られた場合であって、前記他車両検出手段によって前記他車両が検出された場合に、強風による前記他車両との衝突を未然に回避するための走行方法の案内を出力する走行方法案内出力手段と
を備えたことを特徴とする請求項1乃至請求項5のいずれか1項に記載の車両運転支援装置。
【請求項7】
前記他車両検出手段によって検出された前記他車両が大型車であるか否かを判定する大型車判定手段を備え、
前記走行方法案内出力手段は、前記大型車判定手段によって肯定的な判定結果が得られた場合に、前記走行方法の案内を出力すること
を特徴とする請求項6に記載の車両運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−211253(P2010−211253A)
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願番号】特願2009−53321(P2009−53321)
【出願日】平成21年3月6日(2009.3.6)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成22年9月24日(2010.9.24)
【国際特許分類】
【出願日】平成21年3月6日(2009.3.6)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]