
車両運転支援装置
【課題】車両の進行方向に応じて区画線までの距離を正確に検出して運転者に通知することができる車両運転支援装置を提供すること。
【解決手段】車両運転支援装置100は、車両に設置されて周辺の所定範囲を撮影するカメラ10と、カメラ10によって撮影された画像に含まれる区画線を検出する区画線検出部30と、車両の進行方向を判定する進行方向判定部52と、区画線検出部30による検出結果と進行方向判定部52による判定結果とに基づいて、車両が前進しているときに車両の前方端部から区画線までの距離を算出し、車両が後退しているときに車両の後方端部から区画線までの距離を算出する区画線距離算出部50と、区画線距離算出部50によって算出された車両と区画線との間の距離を通知する区画線距離通知部54とを備えている。
【解決手段】車両運転支援装置100は、車両に設置されて周辺の所定範囲を撮影するカメラ10と、カメラ10によって撮影された画像に含まれる区画線を検出する区画線検出部30と、車両の進行方向を判定する進行方向判定部52と、区画線検出部30による検出結果と進行方向判定部52による判定結果とに基づいて、車両が前進しているときに車両の前方端部から区画線までの距離を算出し、車両が後退しているときに車両の後方端部から区画線までの距離を算出する区画線距離算出部50と、区画線距離算出部50によって算出された車両と区画線との間の距離を通知する区画線距離通知部54とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両が縦列駐車等を行う場合に運転者に対して車両の移動を支援する車両運転支援装置に関する。
【背景技術】
【0002】
従来から、走行中の自車両が走行車線から逸脱傾向にあるときに警報を出すようにした車線逸脱警報装置が知られている(例えば、特許文献1参照。)。この装置では、車両後方に設置されたカメラで路面を撮影して俯瞰画像に変換し、この俯瞰画像に含まれる車線(白線)を検出することで、車線に対する車両の位置や逸脱傾向を判断している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−200191号公報(第4−12頁、図1−14)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に開示された車両逸脱警報装置では、走行時の車両に対して白線位置を検出して所定の警報を出すものであるため、路肩に車両を寄せる際に車両を後退させる場合、あるいは縦列駐車のように車両の後退と前進とが繰り返される場合に、運転者に対して白線までの正確な位置を通知することができないという問題があった。
【0005】
すなわち、後退と前進を繰り返して路肩に停車する場合には、車両と白線までの距離としては、後退時には車両の後方端部から白線までの距離が必要になり、前進時には車両の前方端部から白線までの距離が必要になる。しかし、車両の前進を前提とする車両逸脱警報装置では、車両の所定位置から白線までの距離を検出することが行われるため、このような車両の進行方向に応じて適切に白線(区画線)までの距離を検出し、運転者に通知することはできなかった。
【0006】
本発明は、このような点に鑑みて創作されたものであり、その目的は、車両の進行方向に応じて区画線までの距離を正確に検出して運転者に通知することができる車両運転支援装置を提供することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、本発明の車両運転支援装置は、車両に設置されて周辺の所定範囲を撮影するカメラと、カメラによって撮影された画像に含まれる区画線を検出する区画線検出手段と、車両の進行方向を判定する進行方向判定手段と、区画線検出手段による検出結果と進行方向判定手段による判定結果とに基づいて、車両が前進しているときに車両の前方端部から区画線までの距離を算出し、車両が後退しているときに車両の後方端部から区画線までの距離を算出する区画線距離算出手段と、区画線距離算出手段によって算出された車両と区画線との間の距離を通知する区画線距離通知手段とを備えている。車両の進行方向に応じて区画線に最も接近する側の端部と区画線との間の距離を算出することができ、車両の進行方向に応じて区画線までの距離を正確に検出して運転者に通知することが可能となる。
【0008】
また、上述した区画線検出手段によって検出された区画線の位置および方向に基づいて、区画線に対する車両の位置および方向を算出する車両位置・方向算出手段をさらに備え、区画線距離算出手段は、車両位置・方向算出手段による算出結果と進行方向判定手段による判定結果とを用いて区画線までの距離を算出することが望ましい。これにより、区画線に対する車両の位置および方向を算出することにより、車両の前方端部および後方端部のそれぞれと区画線との間の距離を容易に得ることができる。また、車両の前方および後方を別々に撮影する必要がないため、カメラの台数を1台とすることが可能となり、複数台を用いる場合に比べてコストを低減することができる。
【0009】
また、上述した区画線距離通知手段は、車両の速度が第1の速度以下のときに通知を行うことが望ましい。これにより、車両の停車時に車両から区画線までの距離を正確に運転者に通知することが可能となる。
【0010】
また、車両の速度が第1の速度よりも速い第2の速度以上のときに、区画線検出手段による検出結果に基づいて、走行中の車線からの逸脱傾向の有無を判定する逸脱判定手段と、逸脱判定手段によって逸脱傾向にある旨の判定がなされたときに警報を出力する警報出力手段とをさらに備えることが望ましい。これにより、高速走行時には逸脱警報を行い、低速走行時には区画線までの距離の通知を行うことができ、これらの動作を速度に応じて使い分けることができる。また、これらの動作を共通の構成(カメラや区画線検出手段など)で実現することができ、部品の共用化によるコストの低減が可能となる。
【0011】
また、上述した進行方向判定手段は、変速機のギア位置に基づいて車両の進行方向を判定することが望ましい。これにより、容易かつ確実に車両の進行方向を知ることができる。
【0012】
また、上述した区画線距離通知手段による通知の対象となる区画線は、路肩あるいは路側帯を区別する白線であることが望ましい。あるいは、上述した区画線距離通知手段による通知の対象となる区画線は、駐車場において車両毎の駐車領域を区画する白線であることが望ましい。これにより、道路脇に車両を停車させる際、あるいは、駐車場の駐車領域に車両を進入させる際に、車両と区画線との間の距離を正確に運転者に知らせることができる。
【図面の簡単な説明】
【0013】
【図1】一実施形態の車両運転支援装置の構成を示す図である。
【図2】車両と区画線との位置関係を示す図である。
【図3】車両運転支援装置によって車両とこれに隣接する区画線との間の距離を算出して表示する動作手順を示す流れ図である。
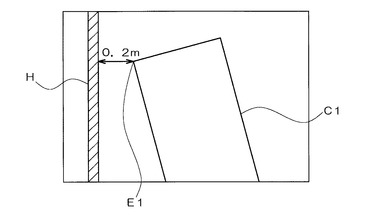
【図4】車両の前方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。
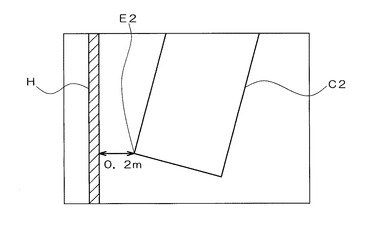
【図5】車両の後方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。
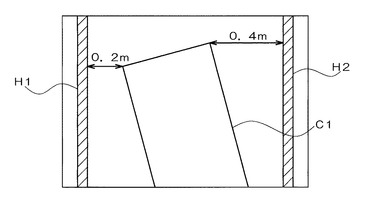
【図6】駐車領域に前進で進入する場合に、車両の前方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。
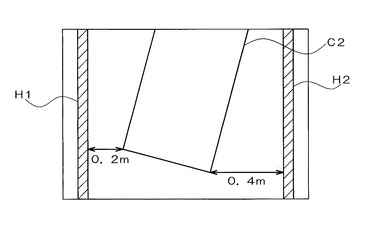
【図7】駐車領域に後退で進入する場合に、車両の後方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。
【図8】低速走行時には進行方向に応じて区画線までの距離を算出して通知し、高速走行時には逸脱傾向を判定して警報出力を行う動作手順を示す流れ図である。
【発明を実施するための形態】
【0014】
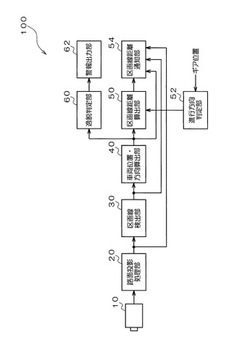
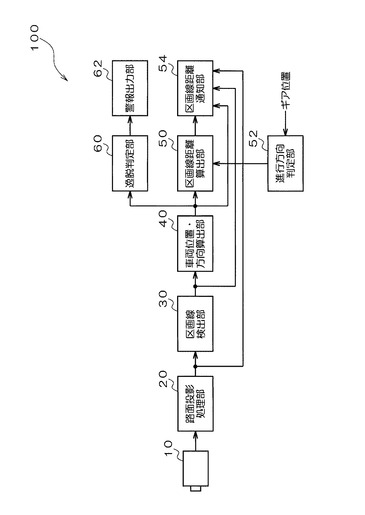
以下、本発明を適用した一実施形態の車両運転支援装置について、図面を参照しながら説明する。図1は、一実施形態の車両運転支援装置の構成を示す図である。図1に示す車両運転支援装置100は、カメラ10、路面投影処理部20、区画線検出部30、車両位置・方向算出部40、区画線距離算出部50、進行方向判定部52、区画線距離通知部54、逸脱判定部60、警報出力部62を備える。
【0015】
カメラ10は、車両側方の所定位置に所定の角度で取り付けられ、魚眼レンズや広角レンズを通して車両側方を撮影してサイドビュー画像を生成する。例えば、カメラ10は、左右ドアミラーに、水平から下向きに30°の角度で取り付けられている。また、カメラ10の左右方向の視野角は180°に設定されており、左右の横方向に配置された路面を含む各種の被写体が撮影される。
【0016】
路面投影処理部20は、カメラ10を用いた撮影によって得られたサイドビュー画像に基づいてトップビュー(登録商標)の画像を生成する視点変換処理を行う。この視点変換処理は、カメラ10のレンズ近傍にある視点位置に対応するサイドビュー画像を、路面の上空にある視点位置に対応するトップビュー画像に変換する処理である。
【0017】
区画線検出部30は、路面投影処理部20によって生成された車両後方のトップビュー画像に含まれる区画線を検出する。検出対象となる区画線には、例えば、道路の路肩あるいは路側帯を区別する白線や、駐車場において車両毎の駐車領域を区画する白線の他、走行車線を区分する白色あるいは黄色の実線あるいは破線などが含まれる。また、カメラ10の設置位置および設置角度は既知(所定位置および角度で取り付けられ、あるいは、取付後にキャリブレーションを行うことにより位置および角度が特定される)であり、路面投影処理部20によって生成されるトップビュー画像内の区画線を抽出することにより、車両に対する区画線の相対的な位置および角度を知ることができる。
【0018】
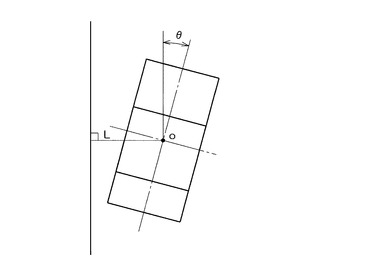
車両位置・方向算出部40は、区画線検出部30によって検出された区画線の位置および方向に基づいて、区画線に対する車両の位置および方向を算出する。例えば、図2に示すように、車両の中心oから区画線に下ろした法線の長さLと車両の中心線(中心oを通り車両の側面と平行な線)と区画線とがなす角度θとが算出される。
【0019】
進行方向判定部52は、車両の進行方向を判定する。例えば、エンジン等の制御を行う電子制御装置ECUから変速機のギア位置を示す信号が入力され、進行方向判定部52は、この信号に基づいて車両の進行方向(前進/後退)を判定する。なお、他の方法、例えばカメラ10を用いた撮影によって得られた画像の内容を解析して車両の進行歩行を判定するようにしてもよい。
【0020】
区画線距離算出部50は、区画線検出部30による検出結果と進行方向判定部52による判定結果とに基づいて、車両が前進しているときに車両の前方端部から区画線までの距離(区画線に最も近い車両の前方端部から区画線に下ろした法線の長さ)を算出し、車両が後退しているときに車両の後方端部から区画線までの距離(区画線に最も近い車両の後方端部から区画線に下ろした法線の長さ)を算出する。区画線距離通知部54は、区画線距離算出部50によって算出された車両と区画線との間の距離を、車両の運転者に向けて通知する。
【0021】
逸脱判定部60は、区画線検出部30による検出結果に基づいて、走行中の車線から車両が逸脱傾向にあるか否かを判定する。例えば、走行速度が所定値以上であって方向指示器が操作されていないなどの条件を満たし、かつ、車線の中央寄りを走行中の車両が左右いずれかの区画線(白線または黄色線)に接近する場合に逸脱傾向にある旨の判定が行われる。警報出力部62は、逸脱判定部60によって逸脱傾向にある旨の判定がなされたときに警報を出力する。
【0022】
上述した区画線検出部30が区画線検出手段に、進行方向判定部52が進行方向判定手段に、区画線距離算出部50が区画線距離算出手段に、区画線距離通知部54が区画線距離通知手段に、車両位置・方向算出部40が車両位置・方向算出手段に、逸脱判定部60が逸脱判定手段に、警報出力部62が警報出力手段にそれぞれ対応する。
【0023】
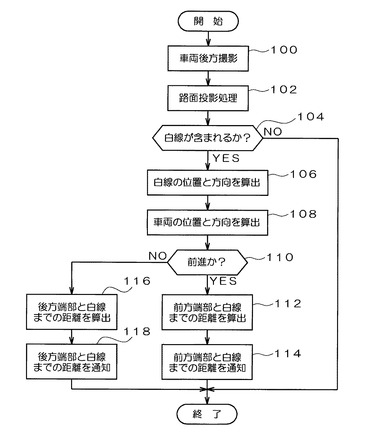
本実施形態の車両運転支援装置100はこのような構成を有しており、次にその動作を説明する。図3は、車両運転支援装置100によって車両とこれに隣接する区画線との間の距離を算出して表示する動作手順を示す流れ図である。例えば、道路に停車する際に、道路の路肩あるいは路側帯を区別する白線までの距離を算出して表示する場合の動作手順が示されている。また、図3に示す動作手順は、所定の時間間隔で実施されるものとする。
【0024】
カメラ10によって車両後方が撮影されてサイドビュー画像が取り込まれると(ステップ100)、路面投影処理部20は、このサイドビュー画像をトップビュー画像に変換する路面投影処理を行う(ステップ102)。
【0025】
次に、区画線検出部30は、変換後のトップビュー画像に含まれる白線(区画線)を検出し、白線が画像内に含まれるか否かを判定する(ステップ104)。例えば、経年変化によって汚れ等がある場合が考慮され、画像内で白色あるいは白色に近い所定幅の直線状の部分が白線として認識される。白線が含まれない場合には否定判断が行われ、白線までの距離算出および通知に関する一連の処理が終了する。
【0026】
また、白線が含まれている場合にはステップ104の判定において肯定判断が行われる。次に、区画線検出部30は、白線の位置および方向を算出する(ステップ106)。また、車両位置・方向算出部40は、車両の位置および方向を算出する(ステップ108)。
【0027】
次に、進行方向判定部52は、ギア位置に基づいて車両が前進しているか否かを判定する(ステップ110)。ギア位置が前進に対応する位置にある場合(例えば、オートマチックトランスミッションのドライブレンジ(Dレンジ)にギア位置が設定されている場合)には肯定判断が行われる。この場合には、区画線距離通知部54は、車両の前方端部と白線までの距離を算出し(ステップ112)、この算出した距離がわかるように運転者に向けて通知を行う(ステップ114)。このようにして、白線までの距離算出および通知に関する一連の処理が行われる。
【0028】
図4は、車両の前方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。図4に示す表示画面には、白線Hと、前方端部を含む車両の一部を表す矩形C1とが含まれている。また、車両の前方端部に対応する矩形C1と白線Hとの距離が数値(0.2m)で示されている。なお、車両の前方端部と白線との間の距離が長い場合には、図4に示す表示画面内に白線Hが含まれない場合もある。この場合には、白線までの距離が長いことを運転者に知らせる何らかの表示を行うようにしてもよい。また、図4に示す表示画面による通知は一例であって、他の内容を有する表示画面を用いたり、このような表示画面に代えて、あるいは、このような表示画面とともに音による通知を行うようにしてもよい。例えば、白線と車両の前方端部との間の距離が短いほど断続周期が短い断続音を出力するようにしてもよい。
【0029】
一方、ギア位置が後退に対応する位置にある場合にはステップ110の判定において否定判断が行われる。この場合には、区画線距離通知部54は、車両の後方端部と白線までの距離を算出し(ステップ116)、この算出した距離がわかるように運転者に向けて通知を行う(ステップ118)。このようにして、白線までの距離算出および通知に関する一連の処理が行われる。
【0030】
図5は、車両の後方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。図5に示す表示画面には、白線Hと、後方端部を含む車両の一部を表す矩形C2とが含まれている。また、車両の後方端部に対応する矩形C2と白線Hとの距離が数値(0.2m)で示されている。なお、車両の後方端部と白線との間の距離が長い場合には、図5に示す表示画面内に白線Hが含まれない場合もある。この場合には、白線までの距離が長いことを運転者に知らせる何らかの表示を行うようにしてもよい。また、図5に示す表示画面による通知は一例であって、他の内容を有する表示画面を用いたり、このような表示画面に代えて、あるいは、このような表示画面とともに音による通知を行うようにしてもよい。
【0031】
このように、本実施形態の車両運転支援装置100では、車両の進行方向に応じて区画線(白線)に最も接近する側の車両の端部と区画線との間の距離を算出することができ、車両の進行方向に応じて区画線までの距離を正確に検出して運転者に通知することが可能となる。また、カメラ10を用いて撮影された画像に含まれる区画線を検出し、この区画線に対する車両の位置および方向を算出することにより、車両の前方端部および後方端部のそれぞれと区画線との間の距離を容易に得ることができる。また、車両の前方および後方を別々に撮影する必要がないため、カメラの台数を1台とすることが可能となり、複数台を用いる場合に比べてコストを低減することができる。
【0032】
また、変速機のギア位置に基づいて車両の進行方向を判定することにより、容易かつ確実に車両の進行方向を知ることができる。また、通知の対象となる区画線を路肩あるいは路側帯を区別する白線としており、道路脇に車両を停車させる際に、車両と区画線との間の距離を正確に運転者に知らせることができる。
【0033】
なお、本発明は上記実施形態に限定されるものではなく、本発明の要旨の範囲内において種々の変形実施が可能である。上述した実施形態では、通知の対象となる区画線を路肩あるいは路側帯を区別する道路の左側に描かれた白線としたが、その他の区画線を通知の対象としてもよい。例えば、駐車場において車両毎の駐車領域を区画する白線を、通知対象の区画線としてもよい。
【0034】
図6は、駐車領域に前進で進入する場合に、車両の前方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。図6に示す表示画面には、白線H1、H2と、前方端部を含む車両の一部を表す矩形C1とが含まれている。また、車両の前方端部(両端部)に対応する矩形C1と白線H1、H2のそれぞれとの距離が数値(0.2m、0.4m)で示されている。
【0035】
図7は、駐車領域に後退で進入する場合に、車両の後方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。図7に示す表示画面には、白線H1、H2と、後方端部を含む車両の一部を表す矩形C2とが含まれている。また、車両の後方端部(両端部)に対応する矩形C2と白線H1、H2のそれぞれとの距離が数値(0.2m、0.4m)で示されている。
【0036】
また、上述した実施形態では、図3に示した動作手順を用いて、進行方向に応じて白線までの距離を算出して通知する動作について説明したが、低速走行時には同様の通知動作を行い、高速走行時には逸脱判定部60および警報出力部62を用いた車両の逸脱傾向判定および警報動作を行うようにしてもよい。
【0037】
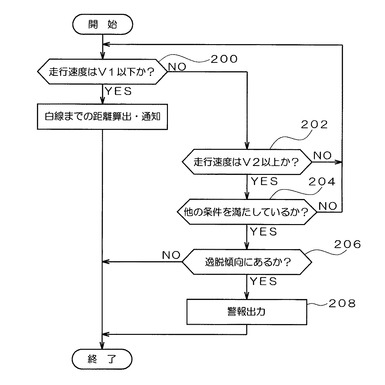
図8は、低速走行時には進行方向に応じて区画線までの距離を算出して通知し、高速走行時には逸脱傾向を判定して警報出力を行う動作手順を示す流れ図である。図8に示す動作手順は、所定の時間間隔で実施されるものとする。
【0038】
まず、車両の走行速度がV1以下か否かが判定される(ステップ200)。この判定は、例えば図示しない速度判定部(速度判定手段)によって、エンジン等の制御を行う電子制御装置ECUや車速センサ等から入力される速度信号に基づいて行われる。また、V1は、区画線までの距離を算出して通知を行う場合の低速走行中か否かを判定するためのものであり、例えばV1=30km/hに設定されている。
【0039】
速度がV1以下の低速走行時にはステップ200の判定において肯定判断が行われる。次に、図3に示した白線までの距離算出および通知に関する一連の処理が実施される。
【0040】
一方、走行速度がV1よりも速い場合にはステップ200の判定において否定判断が行われる。次に、速度判定部は、車両の走行速度がV2(>V1)以上か否かを判定する(ステップ202)。このV2は、逸脱傾向の判定および警報出力を行う高速走行中か否かを判定するためのものであり、例えばV2=60km/hに設定されている。なお、車両の走行速度がV1よりも速い場合に逸脱傾向の判定および警報出力を行うようにしてもよく、この場合にはステップ202の判定動作は省略することができる。
【0041】
速度がV2未満の場合にはステップ202の判定において否定判断が行われ、ステップ200に戻って走行速度がV1以下か否かの判定動作以降が繰り返される。
【0042】
また、速度がV2以上の高速走行時にはステップ202の判定において肯定判断が行われる。次に、逸脱判定部60は、逸脱傾向判定の実施の要否を判断するためにあらかじめ設定されている他の要件を満たしているか否かを判定する(ステップ204)。例えば、他の要件としては、(1)所定時間(例えば20秒間)以上の間フロントワイパースイッチがオフ状態、(2)ウインカースイッチがオフ状態、(3)舵角(ステアリングホイール回転角度)がほぼ直進状態、などがある。これらの複数の要件の中に一つでも満たしていないものがある場合にはステップ204の判定において否定判断が行われ、ステップ200に戻って走行速度がV1以下か否かの判定動作以降が繰り返される。
【0043】
一方、他の要件を全て満たしている場合にはステップ204の判定において肯定判断が行われる。次に、逸脱判定部60は、走行中の車線から車両が逸脱傾向にあるか否かを判定する(ステップ206)。例えば、車両の前方端部から走行車線を区画する区画線(実線あるいは破線の白線あるいは黄色線)までの距離が所定値以下になった場合に逸脱傾向にあると判定される。また、この判定を行う前提として(ステップ206の判定を行う前に)図3に示したステップ100、102、106、108の動作が行われるが、図8に示す流れ図ではこれらの各ステップの図示は省略されている。
【0044】
逸脱傾向にない場合にはステップ206の判定において否定判断が行われ、逸脱傾向の判定および警報出力に関する一連の処理が終了する。また、逸脱傾向にある場合にはステップ206の判定において肯定判断が行われる。次に、警報出力部62は、所定の警報出力を行う(ステップ208)。例えば、インジケータの点灯や警報音の出力などにより警報出力動作が行われ、運転者に対して逸脱傾向にある旨が通知される。
【0045】
このように、高速走行時には逸脱警報を行い、低速走行時には区画線までの距離の通知を行うことができ、これらの動作を速度に応じて使い分けることができる。また、これらの動作を共通の構成(カメラ10や区画線検出部30など)で実現することができ、部品の共用化によるコストの低減が可能となる。
【0046】
また、上述した実施形態では、車両側方に設置されたカメラ10を用いたが、車両前方や車両後方に設置されたカメラを用いたり、これらのカメラを2台以上組み合わせて用いるようにしてもよい。なお、車両前方に設置したカメラを用いる場合には車両前方の所定範囲が撮影範囲となるため、車両の後方端部が撮影範囲から外れるが、撮影範囲に含まれる一部の区画線に基づいて区画線に対する車両の位置および角度(図2)を算出することができるため、区画線が直線であると仮定することで、車両の位置および角度と、車両の大きさ(形状)に基づいて車両の後方端部から区画線までの距離を算出することができる。同様に、車両後方に設置したカメラを用いる場合には車両後方の所定範囲が撮影範囲となるため、車両の前方端部が撮影範囲から外れるが、撮影範囲に含まれる一部の区画線に基づいて区画線に対する車両の位置および角度(図2)を算出することができるため、区画線が直線であると仮定することで、車両の位置および角度と、車両の大きさ(形状)に基づいて車両の前方端部から区画線までの距離を算出することができる。
【0047】
また、上述した実施形態では、カメラ10を車両側方の所定位置に設置しているため、その撮影範囲に、車両の前方端部および後方端部と区画線を含ませることができる。このため、区画線に対する車両の位置および方向を算出することなく、カメラ10によって撮影された画像に基づいて、直接車両の前方端部あるいは後方端部から区画線までの距離を得るようにしてもよい。この場合には、図1に示した車両位置・方向算出部40を省略するようにしてもよい。
【産業上の利用可能性】
【0048】
上述したように、本発明によれば、車両の進行方向に応じて区画線(白線)に最も接近する側の車両の端部と区画線との間の距離を算出することができ、車両の進行方向に応じて区画線までの距離を正確に検出して運転者に通知することが可能となる。
【符号の説明】
【0049】
10 カメラ
20 路面投影処理部
30 区画線検出部
40 車両位置・方向算出部
50 区画線距離算出部
52 進行方向判定部
54 区画線距離通知部
60 逸脱判定部
62 警報出力部
100 車両運転支援装置
【技術分野】
【0001】
本発明は、車両が縦列駐車等を行う場合に運転者に対して車両の移動を支援する車両運転支援装置に関する。
【背景技術】
【0002】
従来から、走行中の自車両が走行車線から逸脱傾向にあるときに警報を出すようにした車線逸脱警報装置が知られている(例えば、特許文献1参照。)。この装置では、車両後方に設置されたカメラで路面を撮影して俯瞰画像に変換し、この俯瞰画像に含まれる車線(白線)を検出することで、車線に対する車両の位置や逸脱傾向を判断している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−200191号公報(第4−12頁、図1−14)
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に開示された車両逸脱警報装置では、走行時の車両に対して白線位置を検出して所定の警報を出すものであるため、路肩に車両を寄せる際に車両を後退させる場合、あるいは縦列駐車のように車両の後退と前進とが繰り返される場合に、運転者に対して白線までの正確な位置を通知することができないという問題があった。
【0005】
すなわち、後退と前進を繰り返して路肩に停車する場合には、車両と白線までの距離としては、後退時には車両の後方端部から白線までの距離が必要になり、前進時には車両の前方端部から白線までの距離が必要になる。しかし、車両の前進を前提とする車両逸脱警報装置では、車両の所定位置から白線までの距離を検出することが行われるため、このような車両の進行方向に応じて適切に白線(区画線)までの距離を検出し、運転者に通知することはできなかった。
【0006】
本発明は、このような点に鑑みて創作されたものであり、その目的は、車両の進行方向に応じて区画線までの距離を正確に検出して運転者に通知することができる車両運転支援装置を提供することにある。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、本発明の車両運転支援装置は、車両に設置されて周辺の所定範囲を撮影するカメラと、カメラによって撮影された画像に含まれる区画線を検出する区画線検出手段と、車両の進行方向を判定する進行方向判定手段と、区画線検出手段による検出結果と進行方向判定手段による判定結果とに基づいて、車両が前進しているときに車両の前方端部から区画線までの距離を算出し、車両が後退しているときに車両の後方端部から区画線までの距離を算出する区画線距離算出手段と、区画線距離算出手段によって算出された車両と区画線との間の距離を通知する区画線距離通知手段とを備えている。車両の進行方向に応じて区画線に最も接近する側の端部と区画線との間の距離を算出することができ、車両の進行方向に応じて区画線までの距離を正確に検出して運転者に通知することが可能となる。
【0008】
また、上述した区画線検出手段によって検出された区画線の位置および方向に基づいて、区画線に対する車両の位置および方向を算出する車両位置・方向算出手段をさらに備え、区画線距離算出手段は、車両位置・方向算出手段による算出結果と進行方向判定手段による判定結果とを用いて区画線までの距離を算出することが望ましい。これにより、区画線に対する車両の位置および方向を算出することにより、車両の前方端部および後方端部のそれぞれと区画線との間の距離を容易に得ることができる。また、車両の前方および後方を別々に撮影する必要がないため、カメラの台数を1台とすることが可能となり、複数台を用いる場合に比べてコストを低減することができる。
【0009】
また、上述した区画線距離通知手段は、車両の速度が第1の速度以下のときに通知を行うことが望ましい。これにより、車両の停車時に車両から区画線までの距離を正確に運転者に通知することが可能となる。
【0010】
また、車両の速度が第1の速度よりも速い第2の速度以上のときに、区画線検出手段による検出結果に基づいて、走行中の車線からの逸脱傾向の有無を判定する逸脱判定手段と、逸脱判定手段によって逸脱傾向にある旨の判定がなされたときに警報を出力する警報出力手段とをさらに備えることが望ましい。これにより、高速走行時には逸脱警報を行い、低速走行時には区画線までの距離の通知を行うことができ、これらの動作を速度に応じて使い分けることができる。また、これらの動作を共通の構成(カメラや区画線検出手段など)で実現することができ、部品の共用化によるコストの低減が可能となる。
【0011】
また、上述した進行方向判定手段は、変速機のギア位置に基づいて車両の進行方向を判定することが望ましい。これにより、容易かつ確実に車両の進行方向を知ることができる。
【0012】
また、上述した区画線距離通知手段による通知の対象となる区画線は、路肩あるいは路側帯を区別する白線であることが望ましい。あるいは、上述した区画線距離通知手段による通知の対象となる区画線は、駐車場において車両毎の駐車領域を区画する白線であることが望ましい。これにより、道路脇に車両を停車させる際、あるいは、駐車場の駐車領域に車両を進入させる際に、車両と区画線との間の距離を正確に運転者に知らせることができる。
【図面の簡単な説明】
【0013】
【図1】一実施形態の車両運転支援装置の構成を示す図である。
【図2】車両と区画線との位置関係を示す図である。
【図3】車両運転支援装置によって車両とこれに隣接する区画線との間の距離を算出して表示する動作手順を示す流れ図である。
【図4】車両の前方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。
【図5】車両の後方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。
【図6】駐車領域に前進で進入する場合に、車両の前方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。
【図7】駐車領域に後退で進入する場合に、車両の後方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。
【図8】低速走行時には進行方向に応じて区画線までの距離を算出して通知し、高速走行時には逸脱傾向を判定して警報出力を行う動作手順を示す流れ図である。
【発明を実施するための形態】
【0014】
以下、本発明を適用した一実施形態の車両運転支援装置について、図面を参照しながら説明する。図1は、一実施形態の車両運転支援装置の構成を示す図である。図1に示す車両運転支援装置100は、カメラ10、路面投影処理部20、区画線検出部30、車両位置・方向算出部40、区画線距離算出部50、進行方向判定部52、区画線距離通知部54、逸脱判定部60、警報出力部62を備える。
【0015】
カメラ10は、車両側方の所定位置に所定の角度で取り付けられ、魚眼レンズや広角レンズを通して車両側方を撮影してサイドビュー画像を生成する。例えば、カメラ10は、左右ドアミラーに、水平から下向きに30°の角度で取り付けられている。また、カメラ10の左右方向の視野角は180°に設定されており、左右の横方向に配置された路面を含む各種の被写体が撮影される。
【0016】
路面投影処理部20は、カメラ10を用いた撮影によって得られたサイドビュー画像に基づいてトップビュー(登録商標)の画像を生成する視点変換処理を行う。この視点変換処理は、カメラ10のレンズ近傍にある視点位置に対応するサイドビュー画像を、路面の上空にある視点位置に対応するトップビュー画像に変換する処理である。
【0017】
区画線検出部30は、路面投影処理部20によって生成された車両後方のトップビュー画像に含まれる区画線を検出する。検出対象となる区画線には、例えば、道路の路肩あるいは路側帯を区別する白線や、駐車場において車両毎の駐車領域を区画する白線の他、走行車線を区分する白色あるいは黄色の実線あるいは破線などが含まれる。また、カメラ10の設置位置および設置角度は既知(所定位置および角度で取り付けられ、あるいは、取付後にキャリブレーションを行うことにより位置および角度が特定される)であり、路面投影処理部20によって生成されるトップビュー画像内の区画線を抽出することにより、車両に対する区画線の相対的な位置および角度を知ることができる。
【0018】
車両位置・方向算出部40は、区画線検出部30によって検出された区画線の位置および方向に基づいて、区画線に対する車両の位置および方向を算出する。例えば、図2に示すように、車両の中心oから区画線に下ろした法線の長さLと車両の中心線(中心oを通り車両の側面と平行な線)と区画線とがなす角度θとが算出される。
【0019】
進行方向判定部52は、車両の進行方向を判定する。例えば、エンジン等の制御を行う電子制御装置ECUから変速機のギア位置を示す信号が入力され、進行方向判定部52は、この信号に基づいて車両の進行方向(前進/後退)を判定する。なお、他の方法、例えばカメラ10を用いた撮影によって得られた画像の内容を解析して車両の進行歩行を判定するようにしてもよい。
【0020】
区画線距離算出部50は、区画線検出部30による検出結果と進行方向判定部52による判定結果とに基づいて、車両が前進しているときに車両の前方端部から区画線までの距離(区画線に最も近い車両の前方端部から区画線に下ろした法線の長さ)を算出し、車両が後退しているときに車両の後方端部から区画線までの距離(区画線に最も近い車両の後方端部から区画線に下ろした法線の長さ)を算出する。区画線距離通知部54は、区画線距離算出部50によって算出された車両と区画線との間の距離を、車両の運転者に向けて通知する。
【0021】
逸脱判定部60は、区画線検出部30による検出結果に基づいて、走行中の車線から車両が逸脱傾向にあるか否かを判定する。例えば、走行速度が所定値以上であって方向指示器が操作されていないなどの条件を満たし、かつ、車線の中央寄りを走行中の車両が左右いずれかの区画線(白線または黄色線)に接近する場合に逸脱傾向にある旨の判定が行われる。警報出力部62は、逸脱判定部60によって逸脱傾向にある旨の判定がなされたときに警報を出力する。
【0022】
上述した区画線検出部30が区画線検出手段に、進行方向判定部52が進行方向判定手段に、区画線距離算出部50が区画線距離算出手段に、区画線距離通知部54が区画線距離通知手段に、車両位置・方向算出部40が車両位置・方向算出手段に、逸脱判定部60が逸脱判定手段に、警報出力部62が警報出力手段にそれぞれ対応する。
【0023】
本実施形態の車両運転支援装置100はこのような構成を有しており、次にその動作を説明する。図3は、車両運転支援装置100によって車両とこれに隣接する区画線との間の距離を算出して表示する動作手順を示す流れ図である。例えば、道路に停車する際に、道路の路肩あるいは路側帯を区別する白線までの距離を算出して表示する場合の動作手順が示されている。また、図3に示す動作手順は、所定の時間間隔で実施されるものとする。
【0024】
カメラ10によって車両後方が撮影されてサイドビュー画像が取り込まれると(ステップ100)、路面投影処理部20は、このサイドビュー画像をトップビュー画像に変換する路面投影処理を行う(ステップ102)。
【0025】
次に、区画線検出部30は、変換後のトップビュー画像に含まれる白線(区画線)を検出し、白線が画像内に含まれるか否かを判定する(ステップ104)。例えば、経年変化によって汚れ等がある場合が考慮され、画像内で白色あるいは白色に近い所定幅の直線状の部分が白線として認識される。白線が含まれない場合には否定判断が行われ、白線までの距離算出および通知に関する一連の処理が終了する。
【0026】
また、白線が含まれている場合にはステップ104の判定において肯定判断が行われる。次に、区画線検出部30は、白線の位置および方向を算出する(ステップ106)。また、車両位置・方向算出部40は、車両の位置および方向を算出する(ステップ108)。
【0027】
次に、進行方向判定部52は、ギア位置に基づいて車両が前進しているか否かを判定する(ステップ110)。ギア位置が前進に対応する位置にある場合(例えば、オートマチックトランスミッションのドライブレンジ(Dレンジ)にギア位置が設定されている場合)には肯定判断が行われる。この場合には、区画線距離通知部54は、車両の前方端部と白線までの距離を算出し(ステップ112)、この算出した距離がわかるように運転者に向けて通知を行う(ステップ114)。このようにして、白線までの距離算出および通知に関する一連の処理が行われる。
【0028】
図4は、車両の前方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。図4に示す表示画面には、白線Hと、前方端部を含む車両の一部を表す矩形C1とが含まれている。また、車両の前方端部に対応する矩形C1と白線Hとの距離が数値(0.2m)で示されている。なお、車両の前方端部と白線との間の距離が長い場合には、図4に示す表示画面内に白線Hが含まれない場合もある。この場合には、白線までの距離が長いことを運転者に知らせる何らかの表示を行うようにしてもよい。また、図4に示す表示画面による通知は一例であって、他の内容を有する表示画面を用いたり、このような表示画面に代えて、あるいは、このような表示画面とともに音による通知を行うようにしてもよい。例えば、白線と車両の前方端部との間の距離が短いほど断続周期が短い断続音を出力するようにしてもよい。
【0029】
一方、ギア位置が後退に対応する位置にある場合にはステップ110の判定において否定判断が行われる。この場合には、区画線距離通知部54は、車両の後方端部と白線までの距離を算出し(ステップ116)、この算出した距離がわかるように運転者に向けて通知を行う(ステップ118)。このようにして、白線までの距離算出および通知に関する一連の処理が行われる。
【0030】
図5は、車両の後方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。図5に示す表示画面には、白線Hと、後方端部を含む車両の一部を表す矩形C2とが含まれている。また、車両の後方端部に対応する矩形C2と白線Hとの距離が数値(0.2m)で示されている。なお、車両の後方端部と白線との間の距離が長い場合には、図5に示す表示画面内に白線Hが含まれない場合もある。この場合には、白線までの距離が長いことを運転者に知らせる何らかの表示を行うようにしてもよい。また、図5に示す表示画面による通知は一例であって、他の内容を有する表示画面を用いたり、このような表示画面に代えて、あるいは、このような表示画面とともに音による通知を行うようにしてもよい。
【0031】
このように、本実施形態の車両運転支援装置100では、車両の進行方向に応じて区画線(白線)に最も接近する側の車両の端部と区画線との間の距離を算出することができ、車両の進行方向に応じて区画線までの距離を正確に検出して運転者に通知することが可能となる。また、カメラ10を用いて撮影された画像に含まれる区画線を検出し、この区画線に対する車両の位置および方向を算出することにより、車両の前方端部および後方端部のそれぞれと区画線との間の距離を容易に得ることができる。また、車両の前方および後方を別々に撮影する必要がないため、カメラの台数を1台とすることが可能となり、複数台を用いる場合に比べてコストを低減することができる。
【0032】
また、変速機のギア位置に基づいて車両の進行方向を判定することにより、容易かつ確実に車両の進行方向を知ることができる。また、通知の対象となる区画線を路肩あるいは路側帯を区別する白線としており、道路脇に車両を停車させる際に、車両と区画線との間の距離を正確に運転者に知らせることができる。
【0033】
なお、本発明は上記実施形態に限定されるものではなく、本発明の要旨の範囲内において種々の変形実施が可能である。上述した実施形態では、通知の対象となる区画線を路肩あるいは路側帯を区別する道路の左側に描かれた白線としたが、その他の区画線を通知の対象としてもよい。例えば、駐車場において車両毎の駐車領域を区画する白線を、通知対象の区画線としてもよい。
【0034】
図6は、駐車領域に前進で進入する場合に、車両の前方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。図6に示す表示画面には、白線H1、H2と、前方端部を含む車両の一部を表す矩形C1とが含まれている。また、車両の前方端部(両端部)に対応する矩形C1と白線H1、H2のそれぞれとの距離が数値(0.2m、0.4m)で示されている。
【0035】
図7は、駐車領域に後退で進入する場合に、車両の後方端部から白線までの距離を表示画面を用いて通知する具体例を示す図である。図7に示す表示画面には、白線H1、H2と、後方端部を含む車両の一部を表す矩形C2とが含まれている。また、車両の後方端部(両端部)に対応する矩形C2と白線H1、H2のそれぞれとの距離が数値(0.2m、0.4m)で示されている。
【0036】
また、上述した実施形態では、図3に示した動作手順を用いて、進行方向に応じて白線までの距離を算出して通知する動作について説明したが、低速走行時には同様の通知動作を行い、高速走行時には逸脱判定部60および警報出力部62を用いた車両の逸脱傾向判定および警報動作を行うようにしてもよい。
【0037】
図8は、低速走行時には進行方向に応じて区画線までの距離を算出して通知し、高速走行時には逸脱傾向を判定して警報出力を行う動作手順を示す流れ図である。図8に示す動作手順は、所定の時間間隔で実施されるものとする。
【0038】
まず、車両の走行速度がV1以下か否かが判定される(ステップ200)。この判定は、例えば図示しない速度判定部(速度判定手段)によって、エンジン等の制御を行う電子制御装置ECUや車速センサ等から入力される速度信号に基づいて行われる。また、V1は、区画線までの距離を算出して通知を行う場合の低速走行中か否かを判定するためのものであり、例えばV1=30km/hに設定されている。
【0039】
速度がV1以下の低速走行時にはステップ200の判定において肯定判断が行われる。次に、図3に示した白線までの距離算出および通知に関する一連の処理が実施される。
【0040】
一方、走行速度がV1よりも速い場合にはステップ200の判定において否定判断が行われる。次に、速度判定部は、車両の走行速度がV2(>V1)以上か否かを判定する(ステップ202)。このV2は、逸脱傾向の判定および警報出力を行う高速走行中か否かを判定するためのものであり、例えばV2=60km/hに設定されている。なお、車両の走行速度がV1よりも速い場合に逸脱傾向の判定および警報出力を行うようにしてもよく、この場合にはステップ202の判定動作は省略することができる。
【0041】
速度がV2未満の場合にはステップ202の判定において否定判断が行われ、ステップ200に戻って走行速度がV1以下か否かの判定動作以降が繰り返される。
【0042】
また、速度がV2以上の高速走行時にはステップ202の判定において肯定判断が行われる。次に、逸脱判定部60は、逸脱傾向判定の実施の要否を判断するためにあらかじめ設定されている他の要件を満たしているか否かを判定する(ステップ204)。例えば、他の要件としては、(1)所定時間(例えば20秒間)以上の間フロントワイパースイッチがオフ状態、(2)ウインカースイッチがオフ状態、(3)舵角(ステアリングホイール回転角度)がほぼ直進状態、などがある。これらの複数の要件の中に一つでも満たしていないものがある場合にはステップ204の判定において否定判断が行われ、ステップ200に戻って走行速度がV1以下か否かの判定動作以降が繰り返される。
【0043】
一方、他の要件を全て満たしている場合にはステップ204の判定において肯定判断が行われる。次に、逸脱判定部60は、走行中の車線から車両が逸脱傾向にあるか否かを判定する(ステップ206)。例えば、車両の前方端部から走行車線を区画する区画線(実線あるいは破線の白線あるいは黄色線)までの距離が所定値以下になった場合に逸脱傾向にあると判定される。また、この判定を行う前提として(ステップ206の判定を行う前に)図3に示したステップ100、102、106、108の動作が行われるが、図8に示す流れ図ではこれらの各ステップの図示は省略されている。
【0044】
逸脱傾向にない場合にはステップ206の判定において否定判断が行われ、逸脱傾向の判定および警報出力に関する一連の処理が終了する。また、逸脱傾向にある場合にはステップ206の判定において肯定判断が行われる。次に、警報出力部62は、所定の警報出力を行う(ステップ208)。例えば、インジケータの点灯や警報音の出力などにより警報出力動作が行われ、運転者に対して逸脱傾向にある旨が通知される。
【0045】
このように、高速走行時には逸脱警報を行い、低速走行時には区画線までの距離の通知を行うことができ、これらの動作を速度に応じて使い分けることができる。また、これらの動作を共通の構成(カメラ10や区画線検出部30など)で実現することができ、部品の共用化によるコストの低減が可能となる。
【0046】
また、上述した実施形態では、車両側方に設置されたカメラ10を用いたが、車両前方や車両後方に設置されたカメラを用いたり、これらのカメラを2台以上組み合わせて用いるようにしてもよい。なお、車両前方に設置したカメラを用いる場合には車両前方の所定範囲が撮影範囲となるため、車両の後方端部が撮影範囲から外れるが、撮影範囲に含まれる一部の区画線に基づいて区画線に対する車両の位置および角度(図2)を算出することができるため、区画線が直線であると仮定することで、車両の位置および角度と、車両の大きさ(形状)に基づいて車両の後方端部から区画線までの距離を算出することができる。同様に、車両後方に設置したカメラを用いる場合には車両後方の所定範囲が撮影範囲となるため、車両の前方端部が撮影範囲から外れるが、撮影範囲に含まれる一部の区画線に基づいて区画線に対する車両の位置および角度(図2)を算出することができるため、区画線が直線であると仮定することで、車両の位置および角度と、車両の大きさ(形状)に基づいて車両の前方端部から区画線までの距離を算出することができる。
【0047】
また、上述した実施形態では、カメラ10を車両側方の所定位置に設置しているため、その撮影範囲に、車両の前方端部および後方端部と区画線を含ませることができる。このため、区画線に対する車両の位置および方向を算出することなく、カメラ10によって撮影された画像に基づいて、直接車両の前方端部あるいは後方端部から区画線までの距離を得るようにしてもよい。この場合には、図1に示した車両位置・方向算出部40を省略するようにしてもよい。
【産業上の利用可能性】
【0048】
上述したように、本発明によれば、車両の進行方向に応じて区画線(白線)に最も接近する側の車両の端部と区画線との間の距離を算出することができ、車両の進行方向に応じて区画線までの距離を正確に検出して運転者に通知することが可能となる。
【符号の説明】
【0049】
10 カメラ
20 路面投影処理部
30 区画線検出部
40 車両位置・方向算出部
50 区画線距離算出部
52 進行方向判定部
54 区画線距離通知部
60 逸脱判定部
62 警報出力部
100 車両運転支援装置
【特許請求の範囲】
【請求項1】
車両に設置されて周辺の所定範囲を撮影するカメラと、
前記カメラによって撮影された画像に含まれる区画線を検出する区画線検出手段と、
車両の進行方向を判定する進行方向判定手段と、
前記区画線検出手段による検出結果と前記進行方向判定手段による判定結果とに基づいて、車両が前進しているときに車両の前方端部から前記区画線までの距離を算出し、車両が後退しているときに車両の後方端部から前記区画線までの距離を算出する区画線距離算出手段と、
前記区画線距離算出手段によって算出された車両と区画線との間の距離を通知する区画線距離通知手段と、
を備えることを特徴とする車両運転支援装置。
【請求項2】
請求項1において、
前記区画線検出手段によって検出された区画線の位置および方向に基づいて、区画線に対する車両の位置および方向を算出する車両位置・方向算出手段をさらに備え、
前記区画線距離算出手段は、前記車両位置・方向算出手段による算出結果と前記進行方向判定手段による判定結果とを用いて前記区画線までの距離を算出することを特徴とする車両運転支援装置。
【請求項3】
請求項1または2において、
前記区画線距離通知手段は、車両の速度が第1の速度以下のときに通知を行うことを特徴とする車両運転支援装置。
【請求項4】
請求項3において、
車両の速度が前記第1の速度よりも速い第2の速度以上のときに、前記区画線検出手段による検出結果に基づいて、走行中の車線からの逸脱傾向の有無を判定する逸脱判定手段と、
前記逸脱判定手段によって逸脱傾向にある旨の判定がなされたときに警報を出力する警報出力手段と、
をさらに備えることを特徴とする車両運転支援装置。
【請求項5】
請求項1〜4のいずれかにおいて、
前記進行方向判定手段は、変速機のギア位置に基づいて車両の進行方向を判定することを特徴とする車両運転支援装置。
【請求項6】
請求項1〜5のいずれかにおいて、
前記区画線距離通知手段による通知の対象となる前記区画線は、路肩あるいは路側帯を区別する白線であることを特徴とする車両運転支援装置。
【請求項7】
請求項1〜5のいずれかにおいて、
前記区画線距離通知手段による通知の対象となる前記区画線は、駐車場において車両毎の駐車領域を区画する白線であることを特徴とする車両運転支援装置。
【請求項1】
車両に設置されて周辺の所定範囲を撮影するカメラと、
前記カメラによって撮影された画像に含まれる区画線を検出する区画線検出手段と、
車両の進行方向を判定する進行方向判定手段と、
前記区画線検出手段による検出結果と前記進行方向判定手段による判定結果とに基づいて、車両が前進しているときに車両の前方端部から前記区画線までの距離を算出し、車両が後退しているときに車両の後方端部から前記区画線までの距離を算出する区画線距離算出手段と、
前記区画線距離算出手段によって算出された車両と区画線との間の距離を通知する区画線距離通知手段と、
を備えることを特徴とする車両運転支援装置。
【請求項2】
請求項1において、
前記区画線検出手段によって検出された区画線の位置および方向に基づいて、区画線に対する車両の位置および方向を算出する車両位置・方向算出手段をさらに備え、
前記区画線距離算出手段は、前記車両位置・方向算出手段による算出結果と前記進行方向判定手段による判定結果とを用いて前記区画線までの距離を算出することを特徴とする車両運転支援装置。
【請求項3】
請求項1または2において、
前記区画線距離通知手段は、車両の速度が第1の速度以下のときに通知を行うことを特徴とする車両運転支援装置。
【請求項4】
請求項3において、
車両の速度が前記第1の速度よりも速い第2の速度以上のときに、前記区画線検出手段による検出結果に基づいて、走行中の車線からの逸脱傾向の有無を判定する逸脱判定手段と、
前記逸脱判定手段によって逸脱傾向にある旨の判定がなされたときに警報を出力する警報出力手段と、
をさらに備えることを特徴とする車両運転支援装置。
【請求項5】
請求項1〜4のいずれかにおいて、
前記進行方向判定手段は、変速機のギア位置に基づいて車両の進行方向を判定することを特徴とする車両運転支援装置。
【請求項6】
請求項1〜5のいずれかにおいて、
前記区画線距離通知手段による通知の対象となる前記区画線は、路肩あるいは路側帯を区別する白線であることを特徴とする車両運転支援装置。
【請求項7】
請求項1〜5のいずれかにおいて、
前記区画線距離通知手段による通知の対象となる前記区画線は、駐車場において車両毎の駐車領域を区画する白線であることを特徴とする車両運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−41495(P2013−41495A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2011−178847(P2011−178847)
【出願日】平成23年8月18日(2011.8.18)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成23年8月18日(2011.8.18)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]