
車両間通信システム

【課題】 自車両が検出できなかった移動体の存在を運転者に知らせることが可能な車両間通信システムを提供する。
【解決手段】 車両同士が通信を行う車両間通信システムであって、車両ごとに設けられた、当該車両の周囲を撮像するカメラ11,11と、カメラ11,11によって撮像された画像から移動体を検出する対象物検出部32と、車両ごとに設けられた、音声を発するスピーカ21と、車両ごとに設けられた、当該車両のスピーカに発音させる音声に関する音声データを生成する音声データ生成部41dと、車両ごとに設けられた、データの送受信を行う送受信機19と、を備え、一の車両の音声データ生成部41dは、他の車両の対象物検出部32によって検出された移動体の存在を知らせる音声データを生成し、スピーカ21に出力する。
【解決手段】 車両同士が通信を行う車両間通信システムであって、車両ごとに設けられた、当該車両の周囲を撮像するカメラ11,11と、カメラ11,11によって撮像された画像から移動体を検出する対象物検出部32と、車両ごとに設けられた、音声を発するスピーカ21と、車両ごとに設けられた、当該車両のスピーカに発音させる音声に関する音声データを生成する音声データ生成部41dと、車両ごとに設けられた、データの送受信を行う送受信機19と、を備え、一の車両の音声データ生成部41dは、他の車両の対象物検出部32によって検出された移動体の存在を知らせる音声データを生成し、スピーカ21に出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両同士が通信を行う車両間通信システムに関する。
【背景技術】
【0002】
従来、カーナビゲーションシステムなどを利用し、車両内に設けられた表示装置や音声出力装置に道路状況などを出力する装置が知られている。
【0003】
特許文献1に記載の交差点事故防止装置は、カメラおよび表示部を備えており、自車両が交差点に進入した際に、自車両のカメラが過去に撮影した交差点付近の映像を表示部に表示させる装置である。
【0004】
また、特許文献2に記載の障害物報知装置は、赤外線カメラおよびスポットランプを備えており、自車両の赤外線カメラによって撮影された画像から障害物(移動体)を検出し、スポットランプが検出された障害物に電磁波マーカを照射することによって、運転者に障害物を知らせる装置である。
【0005】
また、特許文献3に記載の移動体接近報知装置は、自車両近傍の移動体を検出する移動体検出手段と報知手段とを備え、自車両および検出された移動体の進路を推定し、これらが接近する場合に、報知手段が運転者に接近を報知する装置である。
【特許文献1】特開2004−51006号公報(段落0015〜0034、図1〜図4)
【特許文献2】特開2004−185015号公報(段落0010〜0034、図1〜図7)
【特許文献3】特開2004−118418号公報(段落0008〜0029、図1〜図6)
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前記した各特許文献に開示された装置は、自車両が移動体を検出することを前提にしたものであり、自車両が検出することができなかった移動体に関する情報を運転者に知らせることができないという問題があった。
【0007】
本発明は、前記した問題を解決すべく創案されたものであり、自車両が検出できなかった移動体の存在を運転者に知らせることが可能な車両間通信システムを提供することを課題とする。
【課題を解決するための手段】
【0008】
前記課題を解決するため、請求項1に記載の発明は、車両同士が通信を行う車両間通信システムであって、車両ごとに設けられた、当該車両の周囲を撮像する撮像手段と、前記撮像手段によって撮像された画像から移動体を検出する移動体検出部と、車両ごとに設けられた、音声を発する発音手段と、前記車両の前記発音手段に発音させる音声に関する音声データを生成する音声データ生成部と、車両ごとに設けられた、データの送受信を行う送受信手段と、を備え、前記音声データ生成部は、一の車両の前記撮像手段によって撮像された移動体の存在を知らせる音声データを生成し、他の車両の前記発音手段に出力することを特徴とする。
【0009】
このようにすることで、ある車両の撮像手段が撮影できなかった移動体の存在を発音手段に発音させることができ、かかる移動体の存在を運転手に知らせることができる。
【0010】
また、請求項2に記載の発明は、請求項1に記載の車両間通信システムであって、前記車両の位置に関する車両位置データを検出する車両位置データ検出手段と、前記撮像手段によって撮像された画像から前記移動体の位置に関する移動体位置データを生成する移動体位置データ生成部と、をさらに備え、前記音声データ生成部は、前記移動体位置データに基づいて、一の車両の前記撮像手段によって撮像された前記移動体の存在位置を知らせる音声データを生成し、他の車両の前記発音手段に出力することを特徴とする。
【0011】
このようにすることで、移動体の存在に加え、移動体の位置を運転手に知らせることができる。
【0012】
また、請求項3に記載の発明は、請求項2に記載の車両間通信システムであって、情報を共有する車両の組み合わせを決定する情報共有車両決定部をさらに備えていることを特徴とする。
【0013】
このようにすることで、各車両の通信相手の設定が好適に行われる。
【0014】
また、請求項4に記載の発明は、請求項3に記載の車両間通信システムであって、前記情報共有車両決定部は、前記撮像手段の撮像領域に基づいて、前記撮像領域が重なっている車両同士を組み合わせることを特徴とする。
【0015】
このようにすることで、表示不能な移動体に関する通信を減らすことができる。
【0016】
また、請求項5に記載の発明は、請求項3または請求項4に記載の車両間通信システムであって、情報を共有する車両の探索を開始するか否かを判定する探索開始判定部をさらに備え、前記探索開始判定部が情報を共有する車両の探索を開始すると判定した場合に、前記情報共有車両決定手段が情報を共有する車両の組み合わせを決定することを特徴とする。
【0017】
このようにすることで、必要なときのみに車両の組み合わせを決定するので、情報処理量を減らすことができる。
【0018】
また、請求項6に記載の発明は、請求項5に記載の車両間通信システムであって、前記探索開始判定部は、前記車両の前記移動体検出部が移動体を検出した場合に、当該車両に対する情報共有車両の探索を開始するか否かを判定し、前記情報共有車両決定部は、前記探索開始判定部が当該車両に対する情報共有車両の探索を開始すると判定した場合に、当該車両と情報を共有する車両を決定することを特徴とする。
【0019】
このようにすることで、移動体を検出していないときの通信を行わずに済ませることができる。
【0020】
また、請求項7に記載の発明は、請求項6に記載の車両間通信システムであって、地図データを記憶する記憶部をさらに備え、前記探索開始判定部は、前記車両位置データと、前記地図データと、に基づいて、前記車両が前記地図データにおけるノードに接近しているか否かを判定し、前記情報共有車両決定部は、前記探索開始判定部が前記車両が前記ノードに接近していると判定した場合に、当該車両と情報を共有する車両を決定することを特徴とする。
【0021】
このようにすることで、死角が多く移動体との出会い頻度が大きい交差点(ノード)で、移動体の存在を運転手に知らせることができる。
また、ノード(交差点など)に接近している場合のみに通信を行うようになり、通信量を減らすことができる。
【0022】
また、請求項8に記載の発明は、請求項7に記載の車両間通信システムであって、前記車両の近傍に位置する車両を抽出する近傍車両抽出部をさらに備え、前記情報共有車両決定部は、前記近傍車両抽出部によって抽出された車両の中から、情報を共有する車両を決定することを特徴とする。
【0023】
このようにすることで、通信を行う車両の絞込みが好適に行われる。
【発明の効果】
【0024】
本発明によれば、自車両が検出できなかった移動体の存在を、他車両が検出したデータに基づいて運転者に知らせることが可能な車両間通信システムを提供することができる。
【発明を実施するための最良の形態】
【0025】
以下、本発明の実施形態について、適宜図面を参照しながら説明する。同様の部分には同一符号を付し、重複する説明を省略する。なお、以下の説明における「速度」は、スカラー量である。また、説明の便宜上、自車両が検出した移動体を単に「移動体」、他車両が検出した移動体を「他移動体」と記載し、区別することがある。
【0026】
(車両間通信システム1)
まず、本発明の実施形態に係る車両間通信システムの概略について説明する。図1は、本発明の実施形態に係る車両間システムを示すシステム構成図である。
図1に示すように、本発明の実施形態に係る車両間通信システム1は、カーナビゲーションシステムと共用可能なシステムであり、複数の車両Cに個別に設けられた車載装置2と、車両管理装置3と、を備えている。車載装置2は、基地局4およびネットワーク5を介して車両管理装置3と双方向通信可能であるとともに、車両管理装置3を介して他の車両Cの車載装置2とも双方向通信可能である。また、車載装置2は、車両管理装置3を介さずに他の車両Cの車載装置2と直接通信することも可能である。以下、複数の車両Cについて区別が必要である場合には「車両C1、車両C2、・・・」と記載し、区別が必要でない場合には「車両C」と記載する。
【0027】
(車載装置2)
続いて、車載装置2について説明する。図2は、図1の車載装置を示すブロック図である。
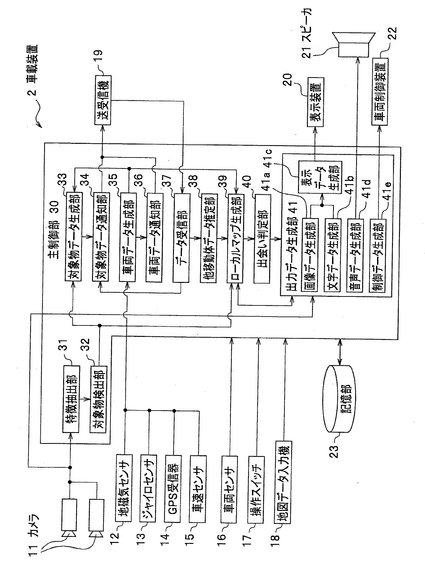
図2に示すように、本発明の実施形態に係る車載装置2は、カメラ11,11と、地磁気センサ12と、ジャイロセンサ13と、GPS受信器14と、車速センサ15と、車両センサ16と、操作スイッチ17と、地図データ入力機18と、送受信機19と、表示装置20と、スピーカ21と、車両制御装置22と、記憶部23と、主制御部30と、を備えている。
【0028】
(カメラ11,11)
カメラ11,11は、映像をデジタルデータとして取り込むことができるものであり、例えばカラーCCD(Charge-Coupled Device)カメラが使用される。カメラ11,11は、左右に平行に並んで配置され、撮影した画像は特徴抽出部31および出力データ生成部41に出力される。このカメラ11,11は、車両Cにその前方を撮影可能に設けられている。
このカメラ11,11が、「撮像手段」の一例である。
【0029】
(地磁気センサ12)
地磁気センサ12は、方位に関するデータ(以下、「方位データ」と記載する。)を検出し、車両データ生成部35に出力する。
【0030】
(ジャイロセンサ13)
ジャイロセンサ13は、車両Cの向きに関するデータ(以下、「車両向きデータ」と記載する。)を検出し、車両データ生成部35に出力する。
このジャイロセンサ13が、「車両向きデータ検出手段」の一例である。
【0031】
(GPS受信器14)
GPS受信器14は、GPS(Global Positioning System)を利用して車両Cの位置(緯度、経度)に関するデータ(以下、「車両位置データ」と記載する。)を検出し、車両データ生成部35に出力する。
このGPS受信器14が、「車両位置データ検出手段」の一例である。
【0032】
(車速センサ15)
車速センサ15は、車両Cの速度(以下、「車両速度データ」と記載する。)を検出し、車両データ生成部35に出力する。
【0033】
(車両センサ16)
車両センサ16は、車両Cの各種状態を検出するものであり、ブレーキペダルの操作量、アクセルペダルの操作量、エンジン回転数、ハンドルの操作量などを検出するセンサを含むセンサ群である。
【0034】
(操作スイッチ17)
操作スイッチ17は、車載装置2の駆動状態を操作するためのスイッチ群であり、例えば、表示装置20のON/OFFを切り換えるスイッチ、スピーカ21の出力音量を調節するスイッチなどを備えている。
【0035】
(地図データ入力機18)
地図データ入力機18は、地図データを入力し、記憶部23に記憶させるためのものである。
【0036】
(送受信機19)
送受信機19は、主制御部30から出力された各種データを基地局4へ送信するとともに、車両管理装置3の制御部50(図3参照)から出力され、基地局4から送信された各種データ、および、他の車両Cの主制御部30から出力され、送受信機19から送信された各種データを受信する無線通信装置である。
この送受信機19が、「送受信手段」の一例である。
【0037】
(表示装置20)
表示装置20は、カメラ11,11によって撮像された車両Cの周囲の画像や、後記する記憶部23に記憶された地図データに基づく画像を出力するための装置である。
また、表示装置20は、後記する画像データ生成部41aにより生成された画像データに基づき、画像を表示するとともに、後記する文字データ生成部41bにより生成された文字データに基づき、文字を表示する。
この表示装置20は、車両Cの車室内に設けられており、運転者が視認可能な位置に設けられている。
この表示装置20が、「表示手段」の一例である。
【0038】
(スピーカ21)
スピーカ21は、後記する音声データ生成部41dにより生成された音声データに基づき、音声を出力する。
このスピーカ21は、車両Cの車室内に設けられており、出力した音声を運転者に伝達可能となっている。
このスピーカ21が、「発音手段」の一例である。
【0039】
(車両制御装置22)
車両制御装置(ECU:Electrical Control Unit)22は、車両Cの動作を制御する装置である。車両制御装置22は、車両センサ16の検出結果および出力データ生成部41の出力に基づいて、ブレーキ液圧を制御したり、クラクションに警報音を発生させたりする。
【0040】
(記憶部23)
記憶部23は、車載装置2が搭載された車両Cに関する車両ID、地図データなどを記憶している。
【0041】
(主制御部30)
主制御部30は、特徴抽出部31と、対象物検出部32と、対象物データ生成部33と、対象物データ通知部34と、車両データ生成部35と、車両データ通知部36と、データ受信部37と、他移動体データ推定部38と、ローカルマップ生成部39と、出会い判定部40と、出力データ生成部41と、を備えている。
【0042】
(特徴抽出部31)
特徴抽出部31は、画像のエッジ成分を抽出すると共に、距離画像を得る。
【0043】
(対象物検出部32)
対象物検出部32は、特徴抽出部31の抽出結果に基づいて、スネーク法などを用いて距離画像のグループクラスタを求め、前回のクラスタとの同一性を判定し、対象物を検出するものであり、「移動体検出部」の一例である。これら特徴抽出部31および対象物検出部32による対象物の検出手法としては、例えば、本願発明と同一の出願人によって出願された特開2004−46426号公報、特開2004−103018号公報に記載の手法を用いることができる。
対象物としては、人、自転車、車両(普通車両、バス、トラックなど)などを含む移動体と、交差点と、が挙げられる。
また、対象物検出部32は、この対象物に関するデータ(以下、「対象物相対データ」と記載する。)を生成し、後記する対象物データ生成部33およびローカルマップ生成部39に出力する。
対象物相対データは、対象物IDと、対象物画像データと、対象物相対位置データと、対象物相対速度データと、対象物相対方向データと、種別データと、を含むデータである。
対象物IDは、対象物検出部32によって、検出された移動体ごとに付与される。
対象物画像データは、対象物を表示させるための画像データである。
対象物相対位置データは、検出された対象物の重心位置に関するデータであり、対象物の車両Cに対する相対位置を示すデータである。
対象物相対速度データは、検出された対象物の速度に関するデータであり、対象物の車両Cに対する相対速度を示すデータである。対象物検出部32は、新しいフレーム(画像)と過去のフレームとを比較することによって対象物相対速度データを算出する。
対象物相対方向データは、検出された対象物の方向(移動方向)に関するデータであり、対象物の車両Cに対する相対移動方向を示すデータである。対象物検出部32は、新しいフレーム(画像)と過去のフレームとを比較することによって対象物相対方向データを算出する。
種別データは、検出された対象物の種類に関するデータである。対象物検出部32は、予め記憶された対象物の種類とその形状とを関連付けたデータを参照することによって、検出された対象物が何であるかを特定し、種別データを生成する。
なお、対象物検出部32は、各種データを算出・生成するにあたり、車両データ生成部35によって生成された車両データを参照することもできる。これは、車両Cの移動方向、車両速度を考慮した上で対象物の各種データを算出・生成するためである。
【0044】
(対象物データ生成部33)
対象物データ生成部33は、対象物検出部32によって検出された検出結果(対象物相対データ)と、車両データ生成部35によって生成された車両データ(後記する)に基づいて、対象物データを生成する。すなわち、対象物データ生成部33は、対象物と車両との相対関係(対象物相対データ)と、車両の道路に対するデータ(車両データ)と、に基づいて、対象物の道路に対するデータ(対象物データ)を生成する。
対象物データは、対象物IDと、対象物画像データと、対象物位置データと、対象物速度データと、対象物方向データと、種別データと、を含むデータである。
すなわち、対象物データ生成部33は、対象物位置データ生成部(移動体データ生成部)であり、対象物速度データ生成部(移動体速度データ生成部)であり、対象物方向データ生成部(移動体データ生成部)である。なお、対象物位置データ、対象物速度データおよび対象物方向データは、これらと同等な物理量を表すデータであればよく、例えば、対象物位置データとして、対象物を検出した車両Cの位置データと、対象物の車両Cに対する相対位置データと、を用いることもできる。このような場合には、GPS受信器14および対象物検出部32の組み合わせが、対象物位置データ生成部に相当することになる。これは、他のデータについても同様である。
【0045】
(対象物データ通知部34)
対象物データ通知部34は、対象物データ生成部33によって生成された対象物移動体データに当該車両Cの車両IDを付与して出力する。出力された対象物データは、送受信機19を介して車両管理装置3および他の車両Cの車載装置2に通知される。
また、対象物データ通知部34は、車両管理装置3および他の車両Cの車載装置2に対する通信状態を接続/切断するための信号を出力する。
【0046】
(車両データ生成部35)
車両データ生成部35は、地磁気センサ12、ジャイロセンサ13、GPS受信器14および車速センサ15の検出結果に基づいて、車両データを生成する。この車両データは、自車の車両ID、車両向きデータ、車両位置データ、車両速度データを含むデータである。生成された車両データは、車両データ通知部36およびローカルマップ生成部39に出力される。また、車両データ生成部35は、カルマンフィルタにより、現時点での車両向きデータ、車両位置データ、車両速度データを推定し、これら推定されたデータを車両データに採用している。
【0047】
(車両データ通知部36)
車両データ通知部36は、車両データ生成部35によって生成された車両データを出力する。出力された車両データは、送受信機19を介して車両管理装置3に通知される。
【0048】
(データ受信部37)
データ受信部37は、車両管理装置3および他の車両Cの車載装置2から送信されたデータを受信する。受信されるデータの一種である他移動体データは、対象物データ通知部34および他移動体データ推定部38に出力される。
【0049】
(他移動体データ推定部38)
他移動体データ推定部38は、入力された他移動体データから、現時点での他移動体データ(以下、「他移動体推定データ」と記載する。)を推定する。かかる推定は、カルマンフィルタにより行われる。また、他移動体データ推定部38は、移動体推定データの一部として、他移動体データおよび車両データに基づいて、他移動体の自車両Cに対する相対位置に関するデータ(以下、「他移動体相対位置データ」と記載する。)を生成する。
【0050】
(ローカルマップ生成部39)
ローカルマップ生成部39は、車両データ生成部35によって生成された車両データと、対象物データ生成部33によって生成された移動体データと、他移動体データ推定部38によって推定された他移動体推定データと、に基づいて、車両Cの周囲の状況に関するローカルマップを生成する。このローカルマップは、車両Cの周囲の移動体の位置、速度などを時間的に管理し、これら過去の履歴から現在の移動体の位置、速度などを推定するものである。出会い判定部40は、この推定されたデータに基づいて、自車両Cと移動体とが出会うか否かを判定する。
ここで、ローカルマップ生成部39は、車両データ生成部35によって生成された車両データおよび対象物データ生成部33によって生成された対象物データと、他移動体データ推定部38によって推定された他移動体推定データと、の同一性を判定する。そして、ローカルマップ生成部39は、これらの同一性が否定された場合にのみ、他移動体推定データをローカルマップに統合する。
これは、自車両Cと同一である他移動体と、自車両Cがデータを取得した移動体と同一である他移動体と、をローカルマップに統合することにより、データの重複が発生してしまうことを防ぐためである。
【0051】
(出会い判定部40)
出会い判定部40は、自車両Cと他車両によって検出された移動体(他移動体)とが出会うか否かを判定する。判定結果は、出力データ生成部41に出力される。この出会い判定部40による判定手法の詳細は後記する。
【0052】
(出力データ生成部41)
出力データ生成部41は、ローカルマップおよび出会い判定部40による判定結果に基づいて、他移動体の存在および他移動体との出会い判定結果を運転者に伝達するための出力データを生成するためのものであり、画像データ生成部41aと、文字データ生成部41bと、表示データ生成部41cと、音声データ生成部41dと、制御データ生成部41eと、を備えている。
【0053】
(画像データ生成部41a)
画像データ生成部41aは、他移動体の存在を表示する画像データを生成し、表示データ生成部41cを介して表示装置20に表示させる。
【0054】
(文字データ生成部41b)
文字データ生成部41bは、他移動体の存在や、他移動体と自車両Cとの出会い判定結果を表す文字データを生成し、表示データ生成部41cを介して表示装置20に表示させる。
この画像データ生成部41aおよび文字データ生成部41bが、「画像/文字データ生成部」の一例である。
【0055】
(表示データ生成部41c)
表示データ生成部41cは、画像データ生成部41aによって生成された画像データと、文字データ生成部41bによって生成された文字データと、に基づいて、表示データを生成し、表示装置20に表示させる。
【0056】
(音声データ生成部41d)
音声データ生成部41dは、他移動体の存在や、他移動体と自車両Cとの出会い判定結果を報知する音声データを生成し、スピーカ21に発話させる。
音声データの生成には、予め記憶された文字情報と音声データとの対応関係が利用される。
【0057】
(制御データ生成部41e)
制御データ生成部41eは、他移動体と自車両Cとの出会い判定結果に基づいて自車両Cの動作を制御する制御データを生成し、車両制御装置22に自車両Cを制御させる。
【0058】
(車両管理装置3)
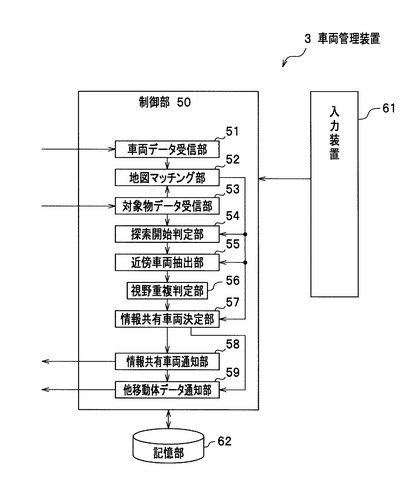
続いて、車両管理装置3について説明する。図3は、図1の車両管理装置を示すブロック図である。
図3に示すように、車両管理装置3は、制御部50と、入力装置61と、記憶部62と、を備えている。
【0059】
(制御部50)
制御部50は、車両データ受信部51と、地図マッチング部52と、対象物データ受信部53と、探索開始判定部54と、近傍車両抽出部55と、視野重複判定部56と、情報共有車両決定部57と、情報共有車両通知部58と、他移動体データ通知部59と、を備えている。
【0060】
(車両データ受信部51)
車両データ受信部51は、各車両Cの車載装置2から送信された車両データを受信する。受信された車両データは、地図マッチング部52に出力される。
【0061】
(地図マッチング部52)
地図マッチング部52は、車両データと、記憶部62に記憶された地図データとをマッチングさせる。かかるマッチングによって、車両Cが走行している道路(アーク)、車両Cが向かっている交差点(ノード)が設定される。
【0062】
(対象物データ受信部53)
対象物データ受信部53は、移動体を検出した車両Cから、車両IDを付与した対象物データを受信する。受信された車両IDおよび対象物データは、地図マッチング部52によってマッチングされた後、探索開始判定部54に出力される。
【0063】
(探索開始判定部54)
探索開始判定部54は、対象物データを送信してきた車両Cに関して、当該車両Cと情報を共有する車両(情報共有車両)の探索を行うか否かを判定する。かかる探索手法についての詳細は後記する。
【0064】
(近傍車両抽出部55)
近傍車両抽出部55は、地図マッチング部52によってマッチングされた車両データに基づいて、対象物データ受信部53によって受信された対象物データに付与された車両IDに関する車両の近傍に位置する車両Cを抽出する。かかる抽出手法についての詳細は後記する。
【0065】
(視野重複判定部56)
視野重複判定部(撮像領域重複判定部)56は、近傍車両抽出部55によって抽出された車両Cの中から、対象物データを送信してきた車両Cと、それぞれの視野、すなわち、カメラC1,C1による撮像領域が重複するか否か、および、どの程度重複するか、を判定する。なお、視野重複の判定手法についての詳細は後記する。
【0066】
(情報共有車両決定部57)
情報共有車両決定部57は、近傍車両抽出部55によって抽出された車両Cの中から、対象物データを送信してきた車両Cと情報の共有を行う車両を選択し、これら情報共有車両の組み合わせを決定する。かかる決定において、情報共有車両決定部57は、視野重複判定部56による判定結果を使用することができる。
【0067】
(情報共有車両通知部58)
情報共有車両通知部58は、情報共有車両決定部57で決定された車両に対して、その旨を通知する。図6の例では、情報共有車両通知部58は、車両C1に車両C2が情報共有車両である旨を通知するとともに、車両C2に車両C1が情報共有車両である旨を通知する。また、情報共有車両通知部58は、移動体を検出した車両C1の車両データを車両C2の車載装置2に通知する。
【0068】
(他移動体データ通知部59)
他移動体データ通知部59は、情報共有車両決定部57によって決定された情報共有車両のうち、対象物を検出していない他の車両Cに対して対象物データ(他移動体データ)を通知する。
【0069】
(入力装置61)
入力装置61は、記憶部62に記憶される各種データ(地図データなど)を入力するための装置である。
【0070】
(記憶部62)
記憶部62は、地図データ、各車両Cから送信された車両データ、各車両Cのカメラ情報(カメラ11,11の車体に対する取り付け方向、撮像領域など)、などを記憶している。このうち、地図データは、交差点をノード、各交差点を連結する道路をアークとして設定されたデータである。
【0071】
(車両間通信システムの第一の動作例)
続いて、車両間通信システム1の第一の動作例について、車載装置2、車両管理装置3の順に説明する。
【0072】
(車載装置の第一の動作例)
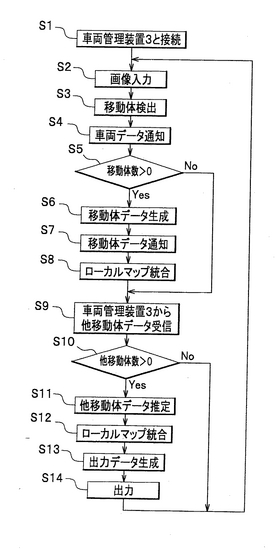
まず、車載装置2の動作例について説明する。図4は、車載装置の第一の動作例を説明するためのフローチャートである。
まず、車載装置2と車両管理装置3とが通信可能に接続される(ステップS1)。
続いて、カメラ11,11が画像を取得する(ステップS2)。
続いて、特徴抽出部31が画像の特徴を抽出し、対象物検出部32が、対象物の一種である移動体を検出する(ステップS3)。
続いて、車両データ通知部36が、車両データを車両管理装置3に通知する(ステップS4)。
対象物検出部32によって検出された移動体がある場合には(ステップS5でYes)、対象物データ生成部33が対象物データの一種である移動体データを生成し(ステップS6)、対象物データ通知部34が移動体データを車両管理装置3に通知する(ステップS7)。
続いて、ローカルマップ生成部39が移動体データをローカルマップに統合する(ステップS8)。
なお、ステップS5において、移動体が検出されていない場合には(ステップS5でNo)、ステップS9に移行する。
【0073】
続いて、データ受信部37が、車両管理装置3から他移動体データを受信する(ステップS9)。
他移動体データがある場合には(ステップS10でYes)、他移動体データ推定部38が他移動体データを推定し(他移動体推定データを生成し)(ステップS11)、ローカルマップ生成部39が他移動体推定データをローカルマップに統合する(ステップS12)。
そして、出力データ生成部41が出力データを生成し(ステップS13)、生成された出力データを出力し、他移動体の存在を運転者に通知する(ステップS14)。その後、ステップS2に移行し、一連の処理を繰り返す。
なお、ステップS10でNoの場合には、ステップS2に移行し、一連の処理を繰り返す。
なお、ステップS12においてローカルマップに統合された他移動体が、自車両Cおよび自車両Cによって検出された移動体と同一である場合には、ステップS12およびステップS14の処理は省略される。
【0074】
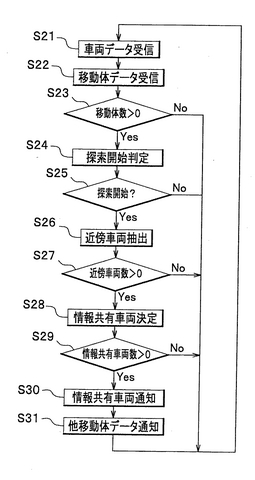
(車両管理装置の第一の動作例)
続いて、車両管理装置3の第一の動作例について説明する。図5は、車両管理装置の第一の動作例を説明するためのフローチャートである。
まず、車両データ受信部51が、前記したステップS4において各車両Cの車両データ通知部36が通知した車両データを受信する(ステップS21)。
続いて、対象物データ受信部52が、前記したステップS7において車両Cの対象物データ通知部34が通知した移動体データを受信する(ステップS22)。
受信した移動体データがある場合には(ステップS23でYes)、探索開始判定部54が起動し、探索開始の可否を判定する(ステップS24)。
探索を開始した場合には(ステップS25でYes)、近傍車両抽出部55が、対象物データを通知してきた車両Cの近傍に位置する車両を抽出する(ステップ26)。
近傍に車両が存在する場合には(ステップS27でYes)、視野重複判定部56が、車両Cと近傍車両との視野の重複度合いを判定し、情報共有車両決定部57が、この判定結果に基づいて、近傍の車両の中から、移動体データを通知してきた車両Cと情報を共有する車両を決定する(ステップS28)。
車両Cと情報を共有する車両がある場合には(ステップS29でYes)、情報共有車両通知部58が、情報共有車両に決定された各車両にその旨を通知するとともに(ステップS30)、他移動体データ通知部59が、この対象物データを他移動体データとして情報を共有する車両に通知する(ステップS31)。その後、ステップS21に移行し、一連の処理を繰り返す。
なお、ステップS23、S25、S27、S29でNoの場合には、ステップS21に移行し、一連の処理を繰り返す。
【0075】
(各手法の詳細説明)
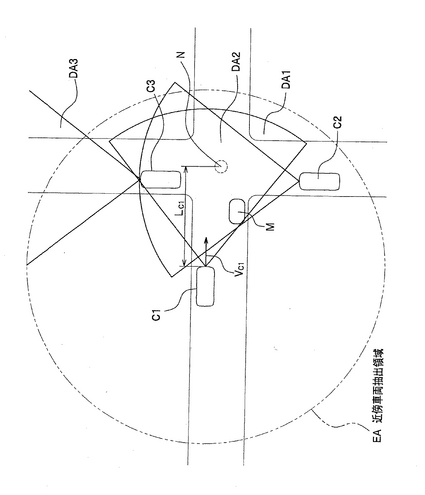
続いて、車両C1,C2,C3および移動体Mが図6に示す配置状態であるときを例にとり、探索開始判定部54による情報共有車両の探索開始判定、近傍車両抽出部55による近傍車両の抽出、および、視野重複判定部56による視野重複の判定、の手法についてさらに詳しく説明する。図6は、情報共有車両の探索開始判定、近傍車両の抽出および視野重複の判定の手法の一例を説明するための図である。
【0076】
(探索開始判定)
まず、車両管理装置3の探索開始判定部54による情報共有車両の探索開始判定の手法の一例について説明する。
図6に示すように、車両管理装置3の記憶部62に記憶された地図データには、道路の交差点(信号)が、ノードNとして設定されている。
探索開始判定部54は、移動体Mを検出した車両C1について、車両C1から送信された車両データに含まれる位置データおよび車両速度データと、地図データにおけるノードNの位置データと、に基づいて、車両C1に関する余裕停止距離Lを算出する。
L = (Tc + Ti)×VC1 +Ls ・・・(1)
ここで、
Tc:通信確立+他車両情報取得に要する時間
Ti:画像処理時間
VC1:車両C1の現在車両速度(ノードNに近づく方向を「正」、ノードNから離れる方向を「負」とする。)
Ls:車両C1の現在車両速度に基づく停止距離
である。
【0077】
この余裕停止距離Lは、車両間通信システム1の通信などに要する時間を考慮し、車両C1がノードNの手前で停止できる距離である。
探索開始判定部54は、車両C1とノードNとの距離LC1が余裕停止距離L以下となった場合に、車両C1に対する情報共有車両の探索を行うように判定する。すなわち、探索開始判定部54は、移動体Mを検出した車両C1が所定条件でノードN(交差点)に接近している場合に、情報共有車両の探索を開始する必要があると判定する。
なお、停止距離Lsは、天候条件(乾燥路面、湿潤路面)、車両条件(ABSの有無)、タイヤ条件(夏用タイヤ、スタッドレス)などの走行環境によって変化し、これら走行環境と停止距離Lsとの関係が記憶部23に予め記憶されている。そして、走行環境は、車両センサ16または図示しない入力装置から各車両Cの主制御部30に入力され、車両データの一部として車両管理装置3に送信される。
また、走行環境に関するデータ(走行環境データ)を取得する走行環境データ取得部と、走行環境データを車両管理装置3に通知する走行環境データ通知部と、を主制御部30内に備え、走行環境データと車両データとを別に処理する構成であっても良い。
【0078】
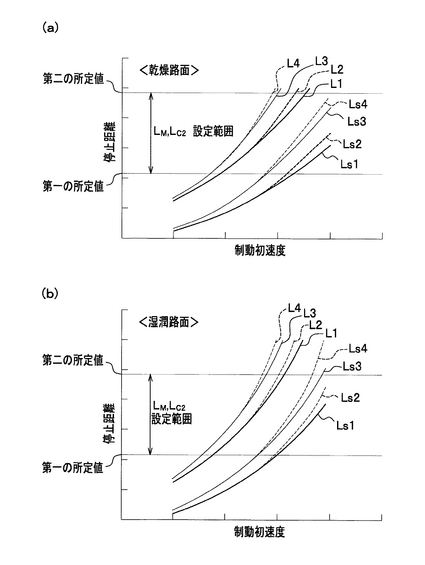
図7は、余裕停止距離を説明するためのグラフである。
図7(a)は、天候条件が「乾燥路面」である場合における、車両条件およびタイヤ条件ごとの停止距離Lsおよび余裕停止距離Lを表すグラフである。図7(b)は、路面条件が「湿潤路面」である場合における、車両条件およびタイヤ条件ごとの停止距離Lsおよび余裕停止距離Lを表すグラフである。
ここで、停止距離Ls1〜Ls4および余裕停止距離L1〜L4の条件設定は、以下の通りである。
Ls1,L1:タイヤ条件「夏用タイヤ装着」、車両条件「ABS付き」
Ls2,L2:タイヤ条件「夏用タイヤ装着」、車両条件「ABS無し」
Ls3,L3:タイヤ条件「スタッドレスタイヤ装着」、車両条件「ABS付き」
Ls4,L4:タイヤ条件「スタッドレスタイヤ装着」、車両条件「ABS無し」
図7(a)(b)に示すように、停止距離Lsは、天候条件(路面条件)によって異なる値をとる。また、それに従い、余裕停止距離Lも天候条件によって異なる。また、停止距離Lsは、天候条件だけでなく、車両条件(ABSの有無)、タイヤ条件(夏用タイヤ、スタッドレスタイヤ)などによっても変化し、記憶部23は、これらの対応関係を記憶している。
そして、記憶部23は、天候条件、車両条件、タイヤ条件などに基づく停止距離Lsを記憶しているとともに、時間Tc,Tiが設定されているため、探索開始判定部54は、これらと車両速度VC1とに基づいて、車両速度VC1を制動初速度とした余裕停止距離Lを算出することができる。
なお、車載装置2は、車両間通信システム1と接続されたカーナビゲーションシステムや、車両Cに搭載された雨滴センサの検出結果から天候条件を取得することができる。
また、車載装置2は、車両CがABS搭載車両である場合には、スリップ検出に基づいて天候条件を判定することもできる。
また、車載装置2は、車両Cのワイパの作動状況に基づいて天候条件を判定することもできる。
また、車載装置2は、図示しない入力装置から車両条件およびタイヤ条件を入力可能である。
【0079】
(近傍車両抽出)
続いて、車両管理装置3の近傍車両抽出部55による近傍車両の抽出の手法の一例について説明する。
近傍車両抽出部55は、探索開始判定部54が情報共有車両の探索を開始する必要があると判定した場合に、車両C1の近傍の車両を抽出する。
近傍車両抽出部55は、車両データ受信部51によって受信されて記憶部62に記憶された各車両Cの車両位置データに基づいて、車両C1から所定距離内、すなわち、図6に示す近傍車両抽出領域EA内に位置する他の車両Cを抽出する。ここでは、車両C2および車両C3が抽出される。
このように、情報共有車両の決定の前処理として、近傍車両抽出部55が車両C1の近傍に位置する車両C2,C3を抽出するので、遠方の車両Cを無視することができ、情報共有車両決定における処理を簡略化することができる。
【0080】
(視野重複判定)
続いて、車両管理装置3の視野重複判定部56による視野重複の判定の手法の一例について説明する。
視野重複判定部56は、近傍車両抽出部55が車両C1の近傍の車両C(C2,C3)を抽出した場合に、車両C1の視野DA1と近傍の車両C(C2,C3)の視野DA2,DA3との重複割合を算出する。
そして、情報共有車両決定部57は、記憶部62に記憶された各車両Cのデータ(カメラの撮像領域または移動体検出領域)に基づいて、車両C1の撮像領域DA1の50%以上を自身の撮像領域(ここでは、車両C2の撮像領域DA2が該当する。車両C3の撮像領域DA3は該当しない。)として重複する車両Cを、車両C1と情報を共有する車両に決定する。ここでは、車両C2が車両C1にとっての情報共有車両であり、車両C3は情報共有車両に該当しない。
かかる撮像領域の重複の割合は、適宜設定変更可能である。
また、撮像領域の先端部は、適宜設定変更可能である。この撮像領域の先端部の設定によって、情報共有車両の選出結果を調節可能である。なお、図6以降に図示された撮像領域の大きさと車両との関係は、発明を説明するためにデフォルメされており、実際の関係を正確に表したものではない。
【0081】
(出会い判定)
続いて、出会い判定部40による車両Cと他移動体との出会い判定について説明する。図8は、車両と移動体との出会い判定について説明するための図である。
図8に示すように、車両C1と車両C2とが共通のノード(交差点)Nに向かって走行している。そして、車両C1が移動体Mを撮影している。
車両C2の出会い判定部40は、ローカルマップに基づいて、自車両C2と他移動体MとがノードNを通過する時刻の差Ts(以下、「余裕時間Ts」と記載する。)を算出する。
余裕時間Tsは、下記式(2)によって算出される。
Ts = |LM/VM−LC2/VC2| ・・・(2)
ここで、
LM:他移動体MのノードNまでの距離
VM:他移動体MのノードNに向かう速度
LC2:自車両C2のノードNまでの距離
VC2:自車両C2の車両速度
である。
【0082】
すなわち、出会い判定部40は、他移動体Mの移動体位置データ、移動体方向データおよび移動体速度データと、自車両C2の車両位置データ、車両向きデータおよび車両速度データと、地図データにおけるノードNの位置データと、に基づいて、他移動体Mと自車両C2との出会いを判定している。
【0083】
なお、車両C2が走行中の道路の法定速度をV0とし、V1=V0+ΔV0(ΔV0はV0の20%)としたとき、余裕時間Tsおよび前記した余裕停止距離Lの算出において、自車両C2の車両速度VC2として、V0またはV1を代用することも可能である。これは、何らかの理由(例えば、カーブ通過中で減速中など)でその時点での車両速度の実測値が、V1から外れている場合などが考えられ、このような場合には、V0またはV1で算出した方が好ましいと考えられるためである。
そして、車両C2の車両速度VC2がV1よりも大きいとき、文字データ生成部41bが、この旨を伝える文字データを生成し、表示装置20に表示させることもできる。
表示例としては、例えば、「スピードが出過ぎています。」などである。また、音声データ生成部41dが、文字データと同様の内容を伝える音声データを生成し、スピーカ21に発話させることもできる。
【0084】
出会い判定部40は、余裕時間Tsの値に基づいて、移動体Mと車両C2との出会い可能性を、4段階に分けて判定する。
(1)Ts≧30secのときには、出会い判定部40は、移動体Mと車両C2との出会い可能性「なし」と判定する。
(2)20sec≦Ts<30secのときには、出会い判定部40は、移動体Mと車両C2との出会い可能性「小」と判定する。
(3)10sec≦Ts<20secのときには、出会い判定部40は、移動体Mと車両C2との出会い可能性「中」と判定する。
(4)Ts<10secのときには、出会い判定部40は、移動体Mと車両C2との出会い可能性「大」と判定する。
そして、文字データ生成部41bおよび音声データ生成部41dは、余裕時間Tsの値に基づいて文字データおよび音声データを生成して表示装置20およびスピーカ21に出力し、表1に示す情報を運転者に通知する。
【0085】
【表1】

【0086】
減速指示の例としては、「スピードを落としてください。」が挙げられる。
徐行指示の例としては、「徐行してください。」が挙げられる。
停止指示の例としては、「停止してください。」が挙げられる。
【0087】
他移動体通行方向案内の例としては、「左から自転車が近づいています。」が挙げられる。
他移動体通行状況案内の例としては、「○秒後に前方交差点に自転車が左から進入します。」が挙げられる。
これら運転手への指示と他移動体Mの案内とが、出会い判定部40による判定結果を知らせるデータの一例である。その他、音声データ生成部41dが運転手への指示を含む音声データを生成しても良く、文字データ生成部41bが移動体Mの案内(通行方向案内、通行状況案内)を含む文字データを生成しても良い。
【0088】
また、余裕時間Tsが5秒以下のとき、制御データ生成部41eが車両制御装置22を駆動してブレーキを利かせ、自車両Cを停止させることが望ましい。
【0089】
なお、余裕時間Tsが表1に示す範囲内であっても、距離LM,LC2が図7に示す範囲外である場合には、表1に示す警報を発生しないようにすることが望ましい。なお、距離LMを使用するのは、移動体Mが車両である場合であり、自転車、人などの場合は除く。
これは、距離LM,LC2が短すぎる場合(第一の所定値よりも小さい場合)には、警報を発生しても運転者が対応する余裕がなく、却って混乱を招くおそれがあるためである。また、距離LM,LC2が長すぎる場合(第二の所定値よりも大きい場合)には、警報を発生しなくても運転者が対応することが可能であると考えられるためである。この距離LM,LC2の範囲を考慮するか否かは、車両C2、他移動体Mの走行道路によるものであり、その関係を表2に示す。
【0090】
【表2】
【0091】
また、これら第一の所定値および第二の所定値を走行環境によって変化させる構成であっても良い。この場合には、第一の所定値および第二の所定値と走行環境との関係が記憶部23に予め記憶されていることが望ましい。
【0092】
続いて、車両C1および車両C2が情報共有車両に設定された場合を例にとり、車両C2における移動体Mの画像表示について説明する。
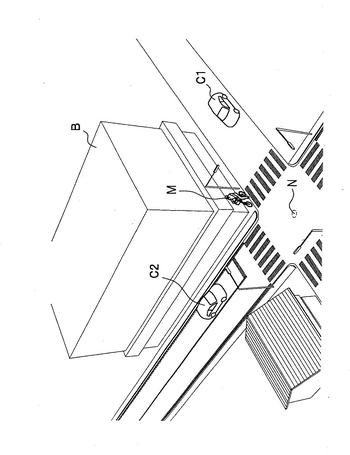
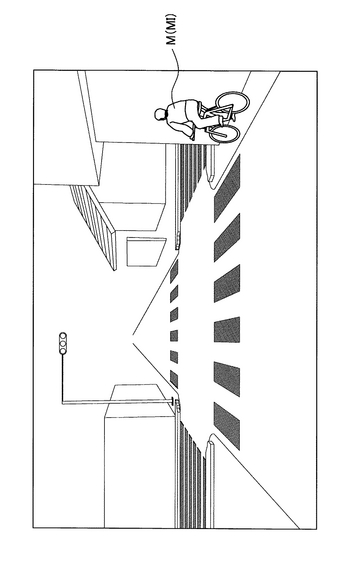
図9は、本発明の実施形態に係る車両間通信システムの第一の動作例に基づく作用を説明するための図であり、車両C1、車両C2および移動体Mの配置状態を説明するための図である。図10は、図9の平面図である。図11は、車両C1のカメラによって撮影された画像を示す図である。図12は、車両C2のカメラによって撮影された画像を示す図である。図13は、移動体の画像の補正を説明するための図であり、(a)は補正前を示す図、(b)は補正後を示す図である。図14は、車両C2の表示装置に表示された移動体画像を示す図である。
【0093】
図9および図10に示すように、車両C1は、ノードNに向かって走行している。また、車両C2は、車両C2とは別の道(アーク)においてノードNに向かって走行している。また、移動体Mは、車両C1と同じ道(アーク)においてノードNに向かって走行している。
図11に示すように、車両C1のカメラ11,11は、移動体Mを撮影しており、対象物検出部32が、移動体Mに関する移動体画像MIを検出している。
また、図12に示すように、車両C2のカメラ11,11は、建物Bが障害となり、移動体Mを撮影することができていない。
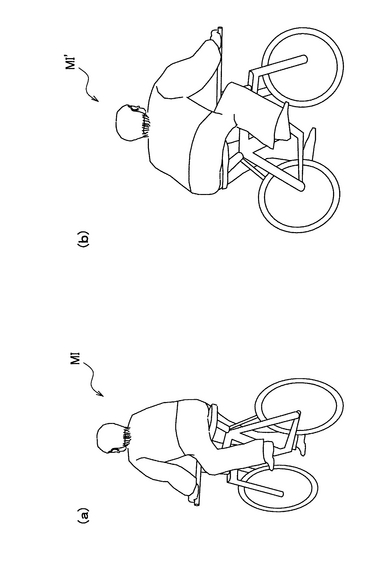
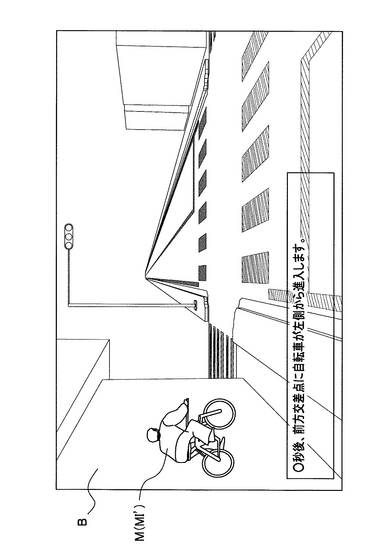
そこで、車両C1の対象物検出部32によって撮影された移動体画像MIが、車両管理装置3を介して車両C2の車載装置2に送信される。車両C2の画像データ生成部41aは、車両C1の車両位置データと、車両C2の車両位置データと、移動体(他移動体)Mの相対位置データと、に基づいて、図13(b)に示す補正された他移動体画像MI’を生成する。ここで、車両C1の車両位置データを利用するのは、車両C1,C2の位置関係によって補正の仕方(反転の有無など)が変わるためである。そして、車両C2の画像データ生成部41aは、カメラ11,11が撮影した画像と、他移動体画像MI’とを合成した画像データを生成し、図14に示すように、表示装置20に表示させる。ここで、画像データ生成部41aは、他移動体画像MI’の合成位置は、他移動体推定データに基づいて決定しており、建物Bがないと仮定した場合に車両C2のカメラ11,11が移動体Mを直接撮像したのに似た画像データを生成している。
このようにすることで、車両C2が検出できなかった移動体Mを、車両C2の表示装置20に表示させ、車両C2の運転者に知らせることができる。
【0094】
また、車両C2の音声データ生成部41dは、他移動体Mの存在を音声で知らせるための音声データを生成し、スピーカ21に発話させる。
発話例としては、「左前方に自転車がいます。」などである。
このようにすることで、車両C2が検出できなかった移動体Mを、車両C2の運転者に音声で知らせることができる。
【0095】
また、文字データ生成部41bは、出会い判定部40の判定結果を文字として表示装置20に表示させる。
また、音声データ生成部41dは、出会い判定部40の判定結果を音声としてスピーカ21に発話させる。
【0096】
(タイミングチャート)
図15は、車両間通信システムの第一の動作例に基づく通信例を示すタイミングチャートである。
まず、車両C1の車載装置2が、前方の画像について特徴抽出および対象物検出を行う。そして、車両C1の車載装置が、対象物データの一種である移動体データを車両管理装置3に送信する。
移動体データを受信した車両管理装置3は、探索開始判定、近傍車両抽出、視野重複判定および情報共有車両決定を順に行い、情報共有車両に決定された車両C(ここでは、車両C2,C3)に他移動体データおよび情報共有連絡信号を送信する。
他移動体データを受信した車両C2,C3の車載装置2は、他移動体データに関して、ローカルマップ統合、画像補正、画像表示を順に行う。
そして、一旦情報共有車両として決定されると、その後、車両管理装置3は、探索開始判定、近傍車両抽出、情報共有車両決定を省略することもできる。なお、これらを省略しない構成も可能である。
また、車両C2,C3の車載装置2は、自身のカメラ11,11が他移動体を撮像するようになったときに、通信切断信号を車両管理装置3へ送信する。かかる通信切断信号は、対象物データ通知部34によって生成、出力される。
また、車両管理装置3が、車両C1と車両C2,C3との撮像領域の重複がなくなったときに、通信切断信号を車両C1,C2,C3の車載装置2へ送信する構成であっても良い。
【0097】
前記したように、車両間通信システム1は、車両C2の車載装置2が、自身で検出できなかった移動体Mについてのデータを車両C1から受信することで、車両C2の表示装置20に移動体Mを表示することができ、車両C2のスピーカ21に移動体Mの存在および存在位置を発話させることができる。
また、車両間通信システム1は、車両C2と移動体Mとの出会い判定を行い、その判定結果を車両C2の表示装置20およびスピーカ21に出力することができる。
したがって、車両間通信システム1は、車両C2のカメラ11,11が撮像できなかった移動体Mの存在および存在位置を、画像、文字、音声の少なくとも一つを用いて車両C2の運転者に知らせることができる。
また、車両間通信システム1は、移動体Mと車両C2とが出会う可能性を、画像、文字、音声の少なくとも一つを用いて車両C2の運転者に知らせることができる。
【0098】
(車両間通信システムの第二の動作例)
続いて、車両間通信システム1の第二の動作例について説明する。なお、車両管理装置3の動作例は、図5に示したものと同一であるため、車載装置2の動作例のみについて説明する。
【0099】
(車載装置の第二の動作例)
車載装置2の第二の動作例について説明する。図16は、車載装置の第二の動作例を説明するためのフローチャートである。
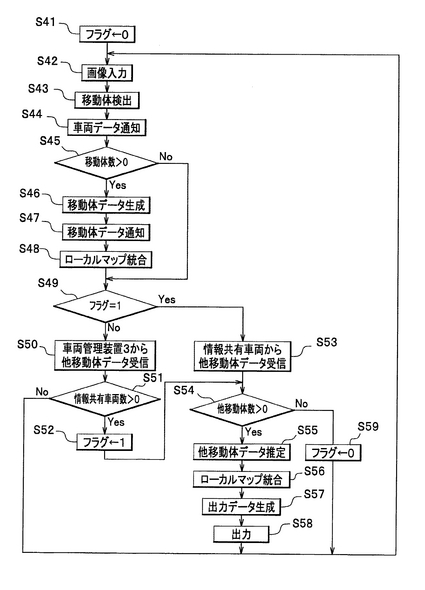
まず、対象物データ通知部34がフラグを「0」に設定する(ステップS41)。
このフラグは、車両Cの車載装置2の通信相手を定めるものであり、フラグが「0」のときには、車載装置2と車両管理装置3とが接続される。また、フラグが「1」のときには、車載装置2と車両管理装置3とが切断されるとともに、自車両Cの車載装置2と他の車両Cの車載装置2とが接続される。これら通信接続/切断は、公知の技術により行われる。
【0100】
ステップS42〜ステップS48は、図4のステップS2〜ステップS8と同一動作であるので、説明を省略する。
【0101】
ステップS48までの処理終了後、フラグが「0」である場合には(ステップS49でNo)、データ受信部37が、車両管理装置3から他移動体データおよび情報共有車両通知信号を受信する(ステップS50)。
情報共有車両がある場合には(ステップS51でYes)、対象物データ通知部34がフラグを「1」に設定する(ステップS52)。
また、ステップS49でYesの場合には、データ受信部37が、情報共有車両から他移動体データを受信する(ステップS53)。
そして、ステップS52またはステップS53の後、他移動体データがある場合には(ステップS54でYes)、ステップS55〜ステップS58を行う。これらステップS55〜ステップS58は、図4のステップS11〜ステップS14と同一動作であるので、説明を省略する。
ステップS54でNoの場合には、対象物データ通知部34がフラグを「0」に設定する(ステップS59)。ステップS51でNoの場合、ステップS58の処理後およびステップS59の処理後には、ステップS42に移行し、一連の処理を繰り返す。
【0102】
このようにすることで、一旦情報共有車両として設定された車両同士は、その後車両管理装置3を介さずに通信することができる。したがって、他移動体データの通信に要する時間を短縮することができる。
【0103】
(車両間通信システムの第三の動作例)
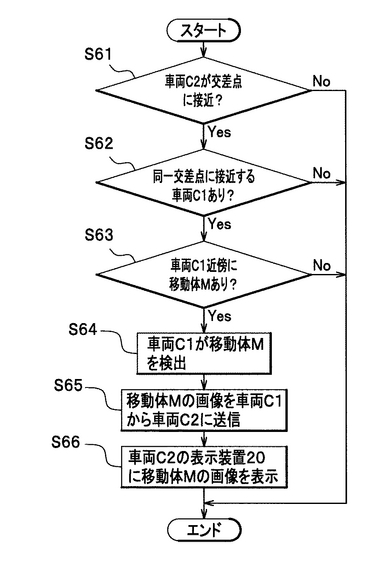
続いて、車両間通信システム1の第三の動作例について説明する。図17は、車両間通信システムの第三の動作例を説明するためのフローチャートである。なお、第三の動作例は、図9および図10に示す状況に適用される。
車両C2がノード(交差点)Nに接近しているときに、探索開始判定部54が、各車両Cから送信された車両データに基づいて、探索を行うと判定し(ステップS61でYes)、近傍車両抽出部55が、同一ノードNに接近する車両があるかを判定する(ステップS62)。
近傍車両抽出部55が車両C1を抽出すると(ステップS62でYes)、情報共有車両決定部56が車両C1,C2を情報共有車両に決定し、情報共有車両通知部58が、情報共有連絡信号を車両C1,C2に通知する。
そして、車両C1の近傍に移動体Mがいる場合には(ステップS63でYes)、車両C1の対象物検出部32が移動体Mを検出し(ステップS64)、車両C1の対象物データ通知部34が移動体Mに関する移動体データを車両C2の車載装置2に通知する(ステップS65)。
そして、車両C2の表示装置20が移動体Mを表示する(ステップS66)。
【0104】
なお、第三の動作例以降の動作例においても、音声による移動体Mの位置の通知や、音声、画像および文字のいずれかによる出会い判定結果の通知を行うことができる。
【0105】
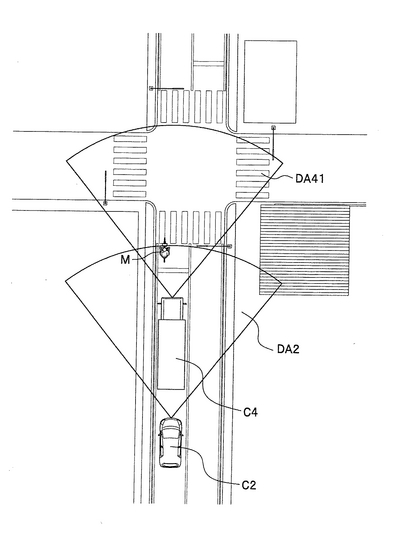
(車両間通信システムの第四の動作例)
続いて、車両間通信システム1の第四の動作例について説明する。図18は、車両間通信システムの第四の動作例の状況説明図である。図19は、車両間通信システムの第四の動作例を説明するためのフローチャートである。
第四の動作例は、図18に示すように、トラックなどの大型車である車両C4が交差点に進入している場合に適用される。車両C4の車載装置2は、その前方、後方、左側方および右側方を撮影するためのカメラを備えており、撮像領域DA41,DA42,DA43,DA44を撮影可能となっている。
まず、探索開始判定部54が、車両C2がノードに接近していると判定すると(ステップS81でYes)、近傍車両抽出部55が、車両C2の前方に車両があるか否かを判定する(ステップS82)。
そして、車両C2の近傍に車両C4がいる場合には(ステップS82でYes)、情報共有車両決定部56が車両C2,C4を情報共有車両に決定し、情報共有車両通知部57が、情報共有連絡信号を車両C2,C4に通知する。
そして、車両C4の近傍に移動体Mがいる場合には(ステップS83でYes)、車両C4の対象物検出部32が移動体Mを検出し(ステップS84)、車両C4の対象物データ通知部34が移動体Mに関する移動体データを車両C2の車載装置2に通知する(ステップS85)。
そして、車両C2の表示装置20が移動体Mを表示する(ステップS86)。
【0106】
なお、ステップS81における交差点への接近判定のかわりに、横断歩道への接近判定を行っても良い。
また、ステップS81、ステップS82の判定に、車両C2の車載装置2における対象物検出部32の検出結果を利用しても良い。
また、この第四の動作例以降の動作例においては、情報共有車両決定部56は、撮影領域の重複を判断することなく情報共有車両を決定することができる。
【0107】
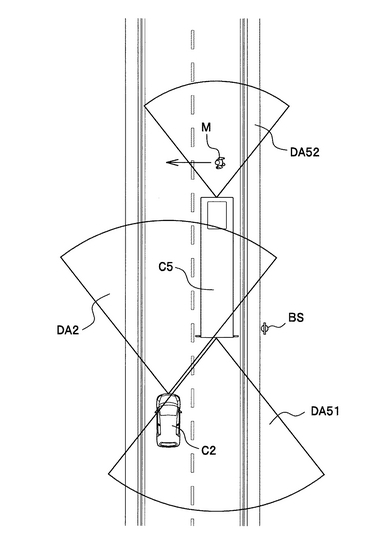
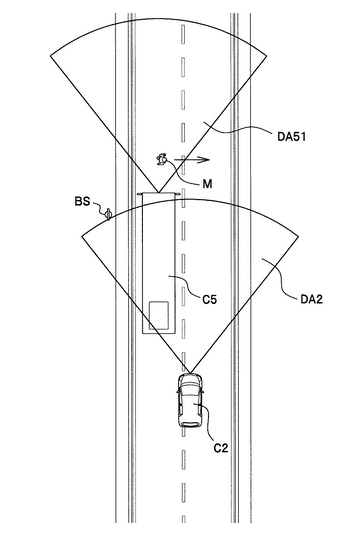
(車両間通信システムの第五の動作例)
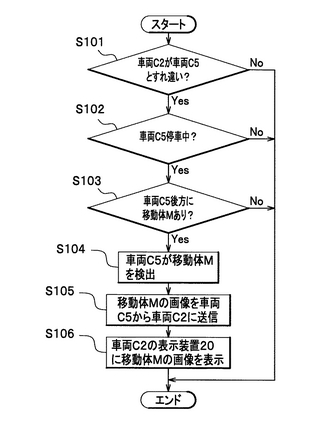
続いて、車両間通信システム1の第五の動作例について説明する。図20は、車両間通信システムの第五の動作例の状況説明図である。図21は、車両間通信システムの第五の動作例を説明するためのフローチャートである。
第五の動作例は、図20に示すように、車両C2の対向車線側にバスである車両C5がバス停BSに停車している場合に適用される。車両C5の車載装置2は、その前方および後方を撮影するためのカメラを備えており、撮像領域DA51,DA52を撮影可能となっている。
まず、探索開始判定部54が、車両C2が車両C5とすれ違おうとしていると判定し(ステップS101でYes)、かつ、車両C5が停車中であると判定すると(ステップS101でYes)、情報共有車両決定部56が車両C2,C5を情報共有車両に決定する。
そして、車両C5の近傍に移動体Mがいる場合には(ステップS103でYes)、車両C5の対象物検出部32が移動体Mを検出し(ステップS104)、車両C5の対象物データ通知部34が移動体Mに関する移動体データを車両C2の車載装置2に通知する(ステップS106)。
そして、車両C2の表示装置20が移動体Mを表示する(ステップS106)。
【0108】
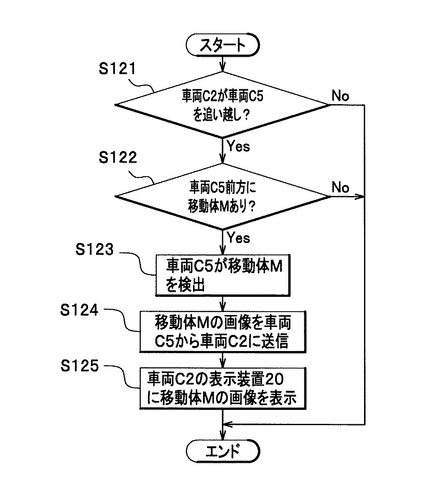
(車両間通信システムの第六の動作例)
続いて、車両間通信システム1の第六の動作例について説明する。図22は、車両間通信システムの第六の動作例の状況説明図である。図23は、本発明の実施形態に係る車両間通信システムの第七の動作例を説明するためのフローチャートである。
第六の動作例は、図22に示すように、車両C2がバス停BSに停車中のバスである車両C5を追い越そうとする場合に適用される。
まず、探索開始判定部54が、車両C2が車両C5を追い越そうとしていると判定すると(ステップS121でYes)、情報共有車両決定部56が車両C2,C5を情報共有車両に決定する。
そして、車両C5の近傍に移動体Mがいる場合には(ステップS122でYes)、車両C5の対象物検出部32が移動体Mを検出し(ステップS123)、車両C5の対象物データ通知部34が移動体Mに関する移動体データを車両C2の車載装置2に通知する(ステップS124)。
そして、車両C2の表示装置20が移動体Mを表示する(ステップS125)。
【0109】
(車両間通信システムの第七の動作例)
続いて、車両間通信システム1の第七の動作例について説明する。図24は、車両間通信システムの第七の動作例の状況説明図である。図25は、車両間通信システムの第七の動作例を説明するためのフローチャートである。
第七の動作例は、図24に示すように、車両C2の同一車線前方にトラックなどの大型車である車両C4が走行している場合に適用される。
まず、探索開始判定部54が、車両C4が車両C2の前方を走行していると判定すると(ステップS141でYes)、情報共有車両決定部56が車両C2,C4を情報共有車両に決定する。
そして、車両C4の近傍に移動体Mがいる場合には(ステップS142でYes)、車両C4の対象物検出部32が移動体Mを検出し(ステップS143)、車両C4の対象物データ通知部34が移動体Mに関する移動体データを車両C2の車載装置2に通知する(ステップS144)。
そして、車両C2の表示装置20が移動体Mを表示する(ステップS145)。
【0110】
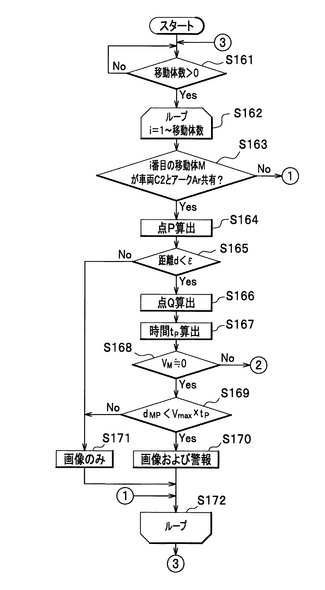
(第八の動作例)
続いて、車両間通信システム1の第八の動作例について説明する。第八の動作例は、前記した第五ないし第七の動作例と組み合わせて実施可能であり、また、第五ないし第七の動作例と同一状況において、第八の動作例を単独で実施することも可能である。ここでは、第八の動作例を第五の動作例と同一状況で単独に実施した場合を例にとって説明する。
図26は、車両間通信システムの第八の動作例を説明するための状況説明図である。図27および図28は、車両間通信システムの第八の動作例を示すフローチャートである。
なお、図26では、各車両の撮像領域を省略している。また、記憶部23,62に記憶された地図データには、ノードN同士を繋ぐアークArが道路中央に設定されており、車両間通信システム1は、このアークArを利用する。
【0111】
まず、車両C4の対象物検出部32が移動体Mを検出すると(ステップS161でYes)、車両管理装置3の情報共有車両決定部57は、近傍車両抽出部55によって抽出された車両Cの中から情報共有車両を決定する。そして、情報共有車両に決定された車両C5,C2間で通信を行う。ここでは、車両C5に関する各種データと移動体Mに関する各種データとが、車両C5の車載装置2から車両C2の車載装置2に送信される。そして、車両C2の車載装置2は、検出された移動体Mの数iの分だけ、ステップS162〜ステップS172の処理を行うループに入る。なお、図26には、一つの移動体Mのみが図示されている。
【0112】
そして、i番目の移動体Mが車両C2とアークArを共有している場合には(ステップS163でYes)、車両C2の出会い判定部40が、i番目の移動体Mの現在位置とアークArとが直交する点Pの位置を算出する(ステップS164)。なお、ステップS163でNoの場合には、次の移動体Mについての処理に移行する。
そして、車両C5と車両C2との距離dが所定距離ε(例えば、ε=50m)よりも短い場合には(ステップS165でYes)、j番目の車両C2の出会い判定部40が、j番目の車両C4とアークArとが直交する点Qの位置を算出する(ステップS166)。
そして、車両C2の出会い判定部40が、車両C2が点Pに到達するのに要する時間tpを算出する(ステップS167)。時間tPは、下記式(3)によって算出される。
tp=|Q−P|/VC2−α ・・・(3)
(αはマージン。車両C2が加速する場合を考慮し、車両C2が点Pにやや早く到達することを想定している。)
そして、i番目の移動体Mの移動速度VMがほぼ0(例えば、時速2km以下)のときには(ステップS168でYes)、出会い判定部40は、移動体Mの現在位置と点Pとの距離dMPが条件式(4)を満たすか否かを判定する(ステップS169)。
dMP<Vmax×tp ・・・(4)
(Vmaxは、移動体Mの最大速度であり、移動体Mの種類ごとに予め記憶部23に記憶されている。)
距離dMPが条件式(4)を満たす場合には(ステップS169でYes)、画像データ生成部41aが移動体Mを表示する画像データを生成するとともに、音声データ生成部41dが移動体Mとの出会い可能性に基づく警報(減速指示、徐行指示など)を知らせる音声データを生成する。これらのデータは、表示装置20およびスピーカ21を介して運転者に通知される(ステップS170)。
距離dMPが条件式(4)を満たさない場合には(ステップS169でNo)、画像データ生成部41aが移動体Mを表示する画像データを生成する。画像データは、表示装置20を介して運転者に通知される(ステップS171)。
【0113】
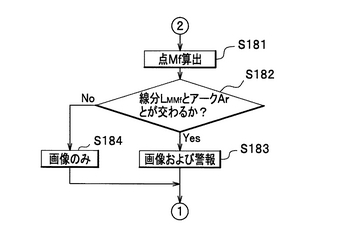
また、ステップS168でNoの場合には、移動体Mの未来位置である点Mfを算出する(ステップS181)。この点Mfの算出は、例えば、カルマンフィルタによる移動体Mの位置推定を tP/Δt 回(ここで、Δtはカルマンフィルタの計算サイクルタイム)繰り返し実施することによって行われる。
そして、出会い判定部40は、点Mと点Mfとを結ぶ線分LMMfとアークArとが交わるか否かを判定する(ステップS182)。
【0114】
ステップS182でYesの場合には、画像データ生成部41aが移動体Mを表示する画像データを生成するとともに、音声データ生成部41dが移動体Mとの出会い可能性に基づく警報(減速指示、徐行指示など)を知らせる音声データを生成する。これらのデータは、表示装置20およびスピーカ21を介して運転者に通知される(ステップS183)。
ステップS182でNoの場合には、画像データ生成部41aが移動体Mを表示する画像データを生成する。画像データは、表示装置20を介して運転者に通知される(ステップS183)。
【0115】
このように、移動体Mの移動速度VMの値によって、その後の処理を変えたのは、以下の理由による。
移動体Mの移動速度VMがほぼゼロの場合には、移動体Mのその後の移動を推定しにくい。そのため、車両C2の車載装置2は、移動体Mが車両C2と出会う方向へ最速移動を行うことを想定した処理を行う。
また、移動体Mの移動速度VMがある程度大きい(ゼロではない)場合には、移動体Mのその後の移動を推定しやすい。そのため、車両C2の車載装置2は、かかる推定を利用した処理を行う。
【0116】
なお、ステップS170,S171,S183,S184において、車載装置2は、文字情報による運転者への通知を使用することもできる。
【0117】
また、車両C2の後続車両Cがある場合には、車両管理装置3の情報共有車両決定部57によって決定された情報共有車両ごとにこれらの処理を行うこともできる。
【0118】
なお、第八の動作例を単独実施する場合は、第五ないし第七の動作例と組み合わせて実施する場合と比較して、移動体Mを検出した場合にのみ近傍車両の抽出を行えば良く、システムの処理速度を高めることができる。
【0119】
以上、本発明の実施形態について説明したが、本発明は前記した各実施形態に限定されず、本発明の要旨を逸脱しない範囲で適宜設計変更可能である。
例えば、車両管理装置3が出会い判定部を備えている構成であってもよい。
また、車両管理装置3の構成の一部または全部を、各車両の車載装置2に組み込んだ構成であっても良く、車載装置2の主制御部30内の構成の一部または全部を、車両管理装置3に組み込んだ構成であっても良い。また、車両位置データ検出手段は、GPS受信器に限定されない。また、各種データは、それと同一の意味を持つ物理量によるデータに置換可能である。
また、撮像領域の設定や、近傍車両抽出領域EAの広さは、適宜設定可能である。
また、移動体Mの画像の代わりに、移動体Mを表すマークや合成画像を表示装置に表示させる構成であっても良い。
また、当該車両のカメラが撮影した画像に他の車両のカメラが撮影した移動体画像を合成するだけでなく、カーナビゲーションシステムによる地図画像に他の車両のカメラが撮影した移動体画像を合成する構成であっても良い。
また、画像データ生成部が出会い判定部の判定結果を表示するための画像データを生成し、出力する構成であっても良い。さらには、文字データ生成部および画像データ生成部が出会い判定結果を表示するための文字データおよび画像データを生成し、文字および画像によって出会い判定結果を運転者に知らせる構成であっても良い。
また、ローカルマップ生成部39などによる各種データの推定(現在データへの変換)は、適宜設定可能である。
【図面の簡単な説明】
【0120】
【図1】本発明の実施形態に係る車両間通信システムを示すシステム構成図である。
【図2】図1の車載装置を示すブロック図である。
【図3】図1の車両管理装置を示すブロック図である。
【図4】車載装置の第一の動作例を説明するためのフローチャートである。
【図5】車両管理装置の第一の動作例を説明するためのフローチャートである。
【図6】情報共有車両の探索開始判定、近傍車両の抽出および視野重複の判定の手法の一例を説明するための図である。
【図7】余裕停止距離を説明するためのグラフである。
【図8】出会い判定を説明するための図である。
【図9】車両間通信システムの第一の動作例に基づく作用を説明するための図であり、車両C1、車両C2および移動体Mの配置状態を説明するための図である。
【図10】図9の平面図である。
【図11】車両C1のカメラによって撮像された画像を示す図である。
【図12】車両C2のカメラによって撮像された画像を示す図である。
【図13】移動体の画像の補正を説明するための図であり、(a)は補正前を示す図、(b)は補正後を示す図である。
【図14】車両C2の画像に車両C1が撮影した移動体を合成した画像を示す図である。
【図15】車両間通信システムの第一の動作例における車載システムおよび車両管理システム間の通信を示すタイミングチャートである。
【図16】車載装置の第二の動作例を説明するためのフローチャートである。
【図17】車両間通信システムの第三の動作例を説明するためのフローチャートである。
【図18】車両間通信システムの第四の動作例を説明するための状況説明図である。
【図19】車両間通信システムの第四の動作例を説明するためのフローチャートである。
【図20】車両間通信システムの第五の動作例を説明するための状況説明図である。
【図21】車両間通信システムの第五の動作例を説明するためのフローチャートである。
【図22】車両間通信システムの第六の動作例を説明するための状況説明図である。
【図23】車両間通信システムの第六の動作例を説明するためのフローチャートである。
【図24】車両間通信システムの第七の動作例を説明するための状況説明図である。
【図25】車両間通信システムの第七の動作例を説明するためのフローチャートである。
【図26】車両間通信システムの第八の動作例を説明するための状況説明図である。
【図27】車両間通信システムの第八の動作例を説明するためのフローチャートである。
【図28】車両間通信システムの第八の動作例を説明するためのフローチャートである。
【符号の説明】
【0121】
1 車両間通信システム
2 車載装置
3 車両管理装置
11 カメラ
13 ジャイロセンサ
14 GPS検出器
20 表示装置
23 スピーカ
32 対象物検出部
33 対象物データ生成部
35 車両データ生成部
41a 画像データ生成部
41b 文字データ生成部
41d 音声データ生成部
41e 制御データ生成部
54 探索開始判定部
55 近傍車両抽出部
57 情報共有車両決定部
62 記憶部
【技術分野】
【0001】
本発明は、車両同士が通信を行う車両間通信システムに関する。
【背景技術】
【0002】
従来、カーナビゲーションシステムなどを利用し、車両内に設けられた表示装置や音声出力装置に道路状況などを出力する装置が知られている。
【0003】
特許文献1に記載の交差点事故防止装置は、カメラおよび表示部を備えており、自車両が交差点に進入した際に、自車両のカメラが過去に撮影した交差点付近の映像を表示部に表示させる装置である。
【0004】
また、特許文献2に記載の障害物報知装置は、赤外線カメラおよびスポットランプを備えており、自車両の赤外線カメラによって撮影された画像から障害物(移動体)を検出し、スポットランプが検出された障害物に電磁波マーカを照射することによって、運転者に障害物を知らせる装置である。
【0005】
また、特許文献3に記載の移動体接近報知装置は、自車両近傍の移動体を検出する移動体検出手段と報知手段とを備え、自車両および検出された移動体の進路を推定し、これらが接近する場合に、報知手段が運転者に接近を報知する装置である。
【特許文献1】特開2004−51006号公報(段落0015〜0034、図1〜図4)
【特許文献2】特開2004−185015号公報(段落0010〜0034、図1〜図7)
【特許文献3】特開2004−118418号公報(段落0008〜0029、図1〜図6)
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、前記した各特許文献に開示された装置は、自車両が移動体を検出することを前提にしたものであり、自車両が検出することができなかった移動体に関する情報を運転者に知らせることができないという問題があった。
【0007】
本発明は、前記した問題を解決すべく創案されたものであり、自車両が検出できなかった移動体の存在を運転者に知らせることが可能な車両間通信システムを提供することを課題とする。
【課題を解決するための手段】
【0008】
前記課題を解決するため、請求項1に記載の発明は、車両同士が通信を行う車両間通信システムであって、車両ごとに設けられた、当該車両の周囲を撮像する撮像手段と、前記撮像手段によって撮像された画像から移動体を検出する移動体検出部と、車両ごとに設けられた、音声を発する発音手段と、前記車両の前記発音手段に発音させる音声に関する音声データを生成する音声データ生成部と、車両ごとに設けられた、データの送受信を行う送受信手段と、を備え、前記音声データ生成部は、一の車両の前記撮像手段によって撮像された移動体の存在を知らせる音声データを生成し、他の車両の前記発音手段に出力することを特徴とする。
【0009】
このようにすることで、ある車両の撮像手段が撮影できなかった移動体の存在を発音手段に発音させることができ、かかる移動体の存在を運転手に知らせることができる。
【0010】
また、請求項2に記載の発明は、請求項1に記載の車両間通信システムであって、前記車両の位置に関する車両位置データを検出する車両位置データ検出手段と、前記撮像手段によって撮像された画像から前記移動体の位置に関する移動体位置データを生成する移動体位置データ生成部と、をさらに備え、前記音声データ生成部は、前記移動体位置データに基づいて、一の車両の前記撮像手段によって撮像された前記移動体の存在位置を知らせる音声データを生成し、他の車両の前記発音手段に出力することを特徴とする。
【0011】
このようにすることで、移動体の存在に加え、移動体の位置を運転手に知らせることができる。
【0012】
また、請求項3に記載の発明は、請求項2に記載の車両間通信システムであって、情報を共有する車両の組み合わせを決定する情報共有車両決定部をさらに備えていることを特徴とする。
【0013】
このようにすることで、各車両の通信相手の設定が好適に行われる。
【0014】
また、請求項4に記載の発明は、請求項3に記載の車両間通信システムであって、前記情報共有車両決定部は、前記撮像手段の撮像領域に基づいて、前記撮像領域が重なっている車両同士を組み合わせることを特徴とする。
【0015】
このようにすることで、表示不能な移動体に関する通信を減らすことができる。
【0016】
また、請求項5に記載の発明は、請求項3または請求項4に記載の車両間通信システムであって、情報を共有する車両の探索を開始するか否かを判定する探索開始判定部をさらに備え、前記探索開始判定部が情報を共有する車両の探索を開始すると判定した場合に、前記情報共有車両決定手段が情報を共有する車両の組み合わせを決定することを特徴とする。
【0017】
このようにすることで、必要なときのみに車両の組み合わせを決定するので、情報処理量を減らすことができる。
【0018】
また、請求項6に記載の発明は、請求項5に記載の車両間通信システムであって、前記探索開始判定部は、前記車両の前記移動体検出部が移動体を検出した場合に、当該車両に対する情報共有車両の探索を開始するか否かを判定し、前記情報共有車両決定部は、前記探索開始判定部が当該車両に対する情報共有車両の探索を開始すると判定した場合に、当該車両と情報を共有する車両を決定することを特徴とする。
【0019】
このようにすることで、移動体を検出していないときの通信を行わずに済ませることができる。
【0020】
また、請求項7に記載の発明は、請求項6に記載の車両間通信システムであって、地図データを記憶する記憶部をさらに備え、前記探索開始判定部は、前記車両位置データと、前記地図データと、に基づいて、前記車両が前記地図データにおけるノードに接近しているか否かを判定し、前記情報共有車両決定部は、前記探索開始判定部が前記車両が前記ノードに接近していると判定した場合に、当該車両と情報を共有する車両を決定することを特徴とする。
【0021】
このようにすることで、死角が多く移動体との出会い頻度が大きい交差点(ノード)で、移動体の存在を運転手に知らせることができる。
また、ノード(交差点など)に接近している場合のみに通信を行うようになり、通信量を減らすことができる。
【0022】
また、請求項8に記載の発明は、請求項7に記載の車両間通信システムであって、前記車両の近傍に位置する車両を抽出する近傍車両抽出部をさらに備え、前記情報共有車両決定部は、前記近傍車両抽出部によって抽出された車両の中から、情報を共有する車両を決定することを特徴とする。
【0023】
このようにすることで、通信を行う車両の絞込みが好適に行われる。
【発明の効果】
【0024】
本発明によれば、自車両が検出できなかった移動体の存在を、他車両が検出したデータに基づいて運転者に知らせることが可能な車両間通信システムを提供することができる。
【発明を実施するための最良の形態】
【0025】
以下、本発明の実施形態について、適宜図面を参照しながら説明する。同様の部分には同一符号を付し、重複する説明を省略する。なお、以下の説明における「速度」は、スカラー量である。また、説明の便宜上、自車両が検出した移動体を単に「移動体」、他車両が検出した移動体を「他移動体」と記載し、区別することがある。
【0026】
(車両間通信システム1)
まず、本発明の実施形態に係る車両間通信システムの概略について説明する。図1は、本発明の実施形態に係る車両間システムを示すシステム構成図である。
図1に示すように、本発明の実施形態に係る車両間通信システム1は、カーナビゲーションシステムと共用可能なシステムであり、複数の車両Cに個別に設けられた車載装置2と、車両管理装置3と、を備えている。車載装置2は、基地局4およびネットワーク5を介して車両管理装置3と双方向通信可能であるとともに、車両管理装置3を介して他の車両Cの車載装置2とも双方向通信可能である。また、車載装置2は、車両管理装置3を介さずに他の車両Cの車載装置2と直接通信することも可能である。以下、複数の車両Cについて区別が必要である場合には「車両C1、車両C2、・・・」と記載し、区別が必要でない場合には「車両C」と記載する。
【0027】
(車載装置2)
続いて、車載装置2について説明する。図2は、図1の車載装置を示すブロック図である。
図2に示すように、本発明の実施形態に係る車載装置2は、カメラ11,11と、地磁気センサ12と、ジャイロセンサ13と、GPS受信器14と、車速センサ15と、車両センサ16と、操作スイッチ17と、地図データ入力機18と、送受信機19と、表示装置20と、スピーカ21と、車両制御装置22と、記憶部23と、主制御部30と、を備えている。
【0028】
(カメラ11,11)
カメラ11,11は、映像をデジタルデータとして取り込むことができるものであり、例えばカラーCCD(Charge-Coupled Device)カメラが使用される。カメラ11,11は、左右に平行に並んで配置され、撮影した画像は特徴抽出部31および出力データ生成部41に出力される。このカメラ11,11は、車両Cにその前方を撮影可能に設けられている。
このカメラ11,11が、「撮像手段」の一例である。
【0029】
(地磁気センサ12)
地磁気センサ12は、方位に関するデータ(以下、「方位データ」と記載する。)を検出し、車両データ生成部35に出力する。
【0030】
(ジャイロセンサ13)
ジャイロセンサ13は、車両Cの向きに関するデータ(以下、「車両向きデータ」と記載する。)を検出し、車両データ生成部35に出力する。
このジャイロセンサ13が、「車両向きデータ検出手段」の一例である。
【0031】
(GPS受信器14)
GPS受信器14は、GPS(Global Positioning System)を利用して車両Cの位置(緯度、経度)に関するデータ(以下、「車両位置データ」と記載する。)を検出し、車両データ生成部35に出力する。
このGPS受信器14が、「車両位置データ検出手段」の一例である。
【0032】
(車速センサ15)
車速センサ15は、車両Cの速度(以下、「車両速度データ」と記載する。)を検出し、車両データ生成部35に出力する。
【0033】
(車両センサ16)
車両センサ16は、車両Cの各種状態を検出するものであり、ブレーキペダルの操作量、アクセルペダルの操作量、エンジン回転数、ハンドルの操作量などを検出するセンサを含むセンサ群である。
【0034】
(操作スイッチ17)
操作スイッチ17は、車載装置2の駆動状態を操作するためのスイッチ群であり、例えば、表示装置20のON/OFFを切り換えるスイッチ、スピーカ21の出力音量を調節するスイッチなどを備えている。
【0035】
(地図データ入力機18)
地図データ入力機18は、地図データを入力し、記憶部23に記憶させるためのものである。
【0036】
(送受信機19)
送受信機19は、主制御部30から出力された各種データを基地局4へ送信するとともに、車両管理装置3の制御部50(図3参照)から出力され、基地局4から送信された各種データ、および、他の車両Cの主制御部30から出力され、送受信機19から送信された各種データを受信する無線通信装置である。
この送受信機19が、「送受信手段」の一例である。
【0037】
(表示装置20)
表示装置20は、カメラ11,11によって撮像された車両Cの周囲の画像や、後記する記憶部23に記憶された地図データに基づく画像を出力するための装置である。
また、表示装置20は、後記する画像データ生成部41aにより生成された画像データに基づき、画像を表示するとともに、後記する文字データ生成部41bにより生成された文字データに基づき、文字を表示する。
この表示装置20は、車両Cの車室内に設けられており、運転者が視認可能な位置に設けられている。
この表示装置20が、「表示手段」の一例である。
【0038】
(スピーカ21)
スピーカ21は、後記する音声データ生成部41dにより生成された音声データに基づき、音声を出力する。
このスピーカ21は、車両Cの車室内に設けられており、出力した音声を運転者に伝達可能となっている。
このスピーカ21が、「発音手段」の一例である。
【0039】
(車両制御装置22)
車両制御装置(ECU:Electrical Control Unit)22は、車両Cの動作を制御する装置である。車両制御装置22は、車両センサ16の検出結果および出力データ生成部41の出力に基づいて、ブレーキ液圧を制御したり、クラクションに警報音を発生させたりする。
【0040】
(記憶部23)
記憶部23は、車載装置2が搭載された車両Cに関する車両ID、地図データなどを記憶している。
【0041】
(主制御部30)
主制御部30は、特徴抽出部31と、対象物検出部32と、対象物データ生成部33と、対象物データ通知部34と、車両データ生成部35と、車両データ通知部36と、データ受信部37と、他移動体データ推定部38と、ローカルマップ生成部39と、出会い判定部40と、出力データ生成部41と、を備えている。
【0042】
(特徴抽出部31)
特徴抽出部31は、画像のエッジ成分を抽出すると共に、距離画像を得る。
【0043】
(対象物検出部32)
対象物検出部32は、特徴抽出部31の抽出結果に基づいて、スネーク法などを用いて距離画像のグループクラスタを求め、前回のクラスタとの同一性を判定し、対象物を検出するものであり、「移動体検出部」の一例である。これら特徴抽出部31および対象物検出部32による対象物の検出手法としては、例えば、本願発明と同一の出願人によって出願された特開2004−46426号公報、特開2004−103018号公報に記載の手法を用いることができる。
対象物としては、人、自転車、車両(普通車両、バス、トラックなど)などを含む移動体と、交差点と、が挙げられる。
また、対象物検出部32は、この対象物に関するデータ(以下、「対象物相対データ」と記載する。)を生成し、後記する対象物データ生成部33およびローカルマップ生成部39に出力する。
対象物相対データは、対象物IDと、対象物画像データと、対象物相対位置データと、対象物相対速度データと、対象物相対方向データと、種別データと、を含むデータである。
対象物IDは、対象物検出部32によって、検出された移動体ごとに付与される。
対象物画像データは、対象物を表示させるための画像データである。
対象物相対位置データは、検出された対象物の重心位置に関するデータであり、対象物の車両Cに対する相対位置を示すデータである。
対象物相対速度データは、検出された対象物の速度に関するデータであり、対象物の車両Cに対する相対速度を示すデータである。対象物検出部32は、新しいフレーム(画像)と過去のフレームとを比較することによって対象物相対速度データを算出する。
対象物相対方向データは、検出された対象物の方向(移動方向)に関するデータであり、対象物の車両Cに対する相対移動方向を示すデータである。対象物検出部32は、新しいフレーム(画像)と過去のフレームとを比較することによって対象物相対方向データを算出する。
種別データは、検出された対象物の種類に関するデータである。対象物検出部32は、予め記憶された対象物の種類とその形状とを関連付けたデータを参照することによって、検出された対象物が何であるかを特定し、種別データを生成する。
なお、対象物検出部32は、各種データを算出・生成するにあたり、車両データ生成部35によって生成された車両データを参照することもできる。これは、車両Cの移動方向、車両速度を考慮した上で対象物の各種データを算出・生成するためである。
【0044】
(対象物データ生成部33)
対象物データ生成部33は、対象物検出部32によって検出された検出結果(対象物相対データ)と、車両データ生成部35によって生成された車両データ(後記する)に基づいて、対象物データを生成する。すなわち、対象物データ生成部33は、対象物と車両との相対関係(対象物相対データ)と、車両の道路に対するデータ(車両データ)と、に基づいて、対象物の道路に対するデータ(対象物データ)を生成する。
対象物データは、対象物IDと、対象物画像データと、対象物位置データと、対象物速度データと、対象物方向データと、種別データと、を含むデータである。
すなわち、対象物データ生成部33は、対象物位置データ生成部(移動体データ生成部)であり、対象物速度データ生成部(移動体速度データ生成部)であり、対象物方向データ生成部(移動体データ生成部)である。なお、対象物位置データ、対象物速度データおよび対象物方向データは、これらと同等な物理量を表すデータであればよく、例えば、対象物位置データとして、対象物を検出した車両Cの位置データと、対象物の車両Cに対する相対位置データと、を用いることもできる。このような場合には、GPS受信器14および対象物検出部32の組み合わせが、対象物位置データ生成部に相当することになる。これは、他のデータについても同様である。
【0045】
(対象物データ通知部34)
対象物データ通知部34は、対象物データ生成部33によって生成された対象物移動体データに当該車両Cの車両IDを付与して出力する。出力された対象物データは、送受信機19を介して車両管理装置3および他の車両Cの車載装置2に通知される。
また、対象物データ通知部34は、車両管理装置3および他の車両Cの車載装置2に対する通信状態を接続/切断するための信号を出力する。
【0046】
(車両データ生成部35)
車両データ生成部35は、地磁気センサ12、ジャイロセンサ13、GPS受信器14および車速センサ15の検出結果に基づいて、車両データを生成する。この車両データは、自車の車両ID、車両向きデータ、車両位置データ、車両速度データを含むデータである。生成された車両データは、車両データ通知部36およびローカルマップ生成部39に出力される。また、車両データ生成部35は、カルマンフィルタにより、現時点での車両向きデータ、車両位置データ、車両速度データを推定し、これら推定されたデータを車両データに採用している。
【0047】
(車両データ通知部36)
車両データ通知部36は、車両データ生成部35によって生成された車両データを出力する。出力された車両データは、送受信機19を介して車両管理装置3に通知される。
【0048】
(データ受信部37)
データ受信部37は、車両管理装置3および他の車両Cの車載装置2から送信されたデータを受信する。受信されるデータの一種である他移動体データは、対象物データ通知部34および他移動体データ推定部38に出力される。
【0049】
(他移動体データ推定部38)
他移動体データ推定部38は、入力された他移動体データから、現時点での他移動体データ(以下、「他移動体推定データ」と記載する。)を推定する。かかる推定は、カルマンフィルタにより行われる。また、他移動体データ推定部38は、移動体推定データの一部として、他移動体データおよび車両データに基づいて、他移動体の自車両Cに対する相対位置に関するデータ(以下、「他移動体相対位置データ」と記載する。)を生成する。
【0050】
(ローカルマップ生成部39)
ローカルマップ生成部39は、車両データ生成部35によって生成された車両データと、対象物データ生成部33によって生成された移動体データと、他移動体データ推定部38によって推定された他移動体推定データと、に基づいて、車両Cの周囲の状況に関するローカルマップを生成する。このローカルマップは、車両Cの周囲の移動体の位置、速度などを時間的に管理し、これら過去の履歴から現在の移動体の位置、速度などを推定するものである。出会い判定部40は、この推定されたデータに基づいて、自車両Cと移動体とが出会うか否かを判定する。
ここで、ローカルマップ生成部39は、車両データ生成部35によって生成された車両データおよび対象物データ生成部33によって生成された対象物データと、他移動体データ推定部38によって推定された他移動体推定データと、の同一性を判定する。そして、ローカルマップ生成部39は、これらの同一性が否定された場合にのみ、他移動体推定データをローカルマップに統合する。
これは、自車両Cと同一である他移動体と、自車両Cがデータを取得した移動体と同一である他移動体と、をローカルマップに統合することにより、データの重複が発生してしまうことを防ぐためである。
【0051】
(出会い判定部40)
出会い判定部40は、自車両Cと他車両によって検出された移動体(他移動体)とが出会うか否かを判定する。判定結果は、出力データ生成部41に出力される。この出会い判定部40による判定手法の詳細は後記する。
【0052】
(出力データ生成部41)
出力データ生成部41は、ローカルマップおよび出会い判定部40による判定結果に基づいて、他移動体の存在および他移動体との出会い判定結果を運転者に伝達するための出力データを生成するためのものであり、画像データ生成部41aと、文字データ生成部41bと、表示データ生成部41cと、音声データ生成部41dと、制御データ生成部41eと、を備えている。
【0053】
(画像データ生成部41a)
画像データ生成部41aは、他移動体の存在を表示する画像データを生成し、表示データ生成部41cを介して表示装置20に表示させる。
【0054】
(文字データ生成部41b)
文字データ生成部41bは、他移動体の存在や、他移動体と自車両Cとの出会い判定結果を表す文字データを生成し、表示データ生成部41cを介して表示装置20に表示させる。
この画像データ生成部41aおよび文字データ生成部41bが、「画像/文字データ生成部」の一例である。
【0055】
(表示データ生成部41c)
表示データ生成部41cは、画像データ生成部41aによって生成された画像データと、文字データ生成部41bによって生成された文字データと、に基づいて、表示データを生成し、表示装置20に表示させる。
【0056】
(音声データ生成部41d)
音声データ生成部41dは、他移動体の存在や、他移動体と自車両Cとの出会い判定結果を報知する音声データを生成し、スピーカ21に発話させる。
音声データの生成には、予め記憶された文字情報と音声データとの対応関係が利用される。
【0057】
(制御データ生成部41e)
制御データ生成部41eは、他移動体と自車両Cとの出会い判定結果に基づいて自車両Cの動作を制御する制御データを生成し、車両制御装置22に自車両Cを制御させる。
【0058】
(車両管理装置3)
続いて、車両管理装置3について説明する。図3は、図1の車両管理装置を示すブロック図である。
図3に示すように、車両管理装置3は、制御部50と、入力装置61と、記憶部62と、を備えている。
【0059】
(制御部50)
制御部50は、車両データ受信部51と、地図マッチング部52と、対象物データ受信部53と、探索開始判定部54と、近傍車両抽出部55と、視野重複判定部56と、情報共有車両決定部57と、情報共有車両通知部58と、他移動体データ通知部59と、を備えている。
【0060】
(車両データ受信部51)
車両データ受信部51は、各車両Cの車載装置2から送信された車両データを受信する。受信された車両データは、地図マッチング部52に出力される。
【0061】
(地図マッチング部52)
地図マッチング部52は、車両データと、記憶部62に記憶された地図データとをマッチングさせる。かかるマッチングによって、車両Cが走行している道路(アーク)、車両Cが向かっている交差点(ノード)が設定される。
【0062】
(対象物データ受信部53)
対象物データ受信部53は、移動体を検出した車両Cから、車両IDを付与した対象物データを受信する。受信された車両IDおよび対象物データは、地図マッチング部52によってマッチングされた後、探索開始判定部54に出力される。
【0063】
(探索開始判定部54)
探索開始判定部54は、対象物データを送信してきた車両Cに関して、当該車両Cと情報を共有する車両(情報共有車両)の探索を行うか否かを判定する。かかる探索手法についての詳細は後記する。
【0064】
(近傍車両抽出部55)
近傍車両抽出部55は、地図マッチング部52によってマッチングされた車両データに基づいて、対象物データ受信部53によって受信された対象物データに付与された車両IDに関する車両の近傍に位置する車両Cを抽出する。かかる抽出手法についての詳細は後記する。
【0065】
(視野重複判定部56)
視野重複判定部(撮像領域重複判定部)56は、近傍車両抽出部55によって抽出された車両Cの中から、対象物データを送信してきた車両Cと、それぞれの視野、すなわち、カメラC1,C1による撮像領域が重複するか否か、および、どの程度重複するか、を判定する。なお、視野重複の判定手法についての詳細は後記する。
【0066】
(情報共有車両決定部57)
情報共有車両決定部57は、近傍車両抽出部55によって抽出された車両Cの中から、対象物データを送信してきた車両Cと情報の共有を行う車両を選択し、これら情報共有車両の組み合わせを決定する。かかる決定において、情報共有車両決定部57は、視野重複判定部56による判定結果を使用することができる。
【0067】
(情報共有車両通知部58)
情報共有車両通知部58は、情報共有車両決定部57で決定された車両に対して、その旨を通知する。図6の例では、情報共有車両通知部58は、車両C1に車両C2が情報共有車両である旨を通知するとともに、車両C2に車両C1が情報共有車両である旨を通知する。また、情報共有車両通知部58は、移動体を検出した車両C1の車両データを車両C2の車載装置2に通知する。
【0068】
(他移動体データ通知部59)
他移動体データ通知部59は、情報共有車両決定部57によって決定された情報共有車両のうち、対象物を検出していない他の車両Cに対して対象物データ(他移動体データ)を通知する。
【0069】
(入力装置61)
入力装置61は、記憶部62に記憶される各種データ(地図データなど)を入力するための装置である。
【0070】
(記憶部62)
記憶部62は、地図データ、各車両Cから送信された車両データ、各車両Cのカメラ情報(カメラ11,11の車体に対する取り付け方向、撮像領域など)、などを記憶している。このうち、地図データは、交差点をノード、各交差点を連結する道路をアークとして設定されたデータである。
【0071】
(車両間通信システムの第一の動作例)
続いて、車両間通信システム1の第一の動作例について、車載装置2、車両管理装置3の順に説明する。
【0072】
(車載装置の第一の動作例)
まず、車載装置2の動作例について説明する。図4は、車載装置の第一の動作例を説明するためのフローチャートである。
まず、車載装置2と車両管理装置3とが通信可能に接続される(ステップS1)。
続いて、カメラ11,11が画像を取得する(ステップS2)。
続いて、特徴抽出部31が画像の特徴を抽出し、対象物検出部32が、対象物の一種である移動体を検出する(ステップS3)。
続いて、車両データ通知部36が、車両データを車両管理装置3に通知する(ステップS4)。
対象物検出部32によって検出された移動体がある場合には(ステップS5でYes)、対象物データ生成部33が対象物データの一種である移動体データを生成し(ステップS6)、対象物データ通知部34が移動体データを車両管理装置3に通知する(ステップS7)。
続いて、ローカルマップ生成部39が移動体データをローカルマップに統合する(ステップS8)。
なお、ステップS5において、移動体が検出されていない場合には(ステップS5でNo)、ステップS9に移行する。
【0073】
続いて、データ受信部37が、車両管理装置3から他移動体データを受信する(ステップS9)。
他移動体データがある場合には(ステップS10でYes)、他移動体データ推定部38が他移動体データを推定し(他移動体推定データを生成し)(ステップS11)、ローカルマップ生成部39が他移動体推定データをローカルマップに統合する(ステップS12)。
そして、出力データ生成部41が出力データを生成し(ステップS13)、生成された出力データを出力し、他移動体の存在を運転者に通知する(ステップS14)。その後、ステップS2に移行し、一連の処理を繰り返す。
なお、ステップS10でNoの場合には、ステップS2に移行し、一連の処理を繰り返す。
なお、ステップS12においてローカルマップに統合された他移動体が、自車両Cおよび自車両Cによって検出された移動体と同一である場合には、ステップS12およびステップS14の処理は省略される。
【0074】
(車両管理装置の第一の動作例)
続いて、車両管理装置3の第一の動作例について説明する。図5は、車両管理装置の第一の動作例を説明するためのフローチャートである。
まず、車両データ受信部51が、前記したステップS4において各車両Cの車両データ通知部36が通知した車両データを受信する(ステップS21)。
続いて、対象物データ受信部52が、前記したステップS7において車両Cの対象物データ通知部34が通知した移動体データを受信する(ステップS22)。
受信した移動体データがある場合には(ステップS23でYes)、探索開始判定部54が起動し、探索開始の可否を判定する(ステップS24)。
探索を開始した場合には(ステップS25でYes)、近傍車両抽出部55が、対象物データを通知してきた車両Cの近傍に位置する車両を抽出する(ステップ26)。
近傍に車両が存在する場合には(ステップS27でYes)、視野重複判定部56が、車両Cと近傍車両との視野の重複度合いを判定し、情報共有車両決定部57が、この判定結果に基づいて、近傍の車両の中から、移動体データを通知してきた車両Cと情報を共有する車両を決定する(ステップS28)。
車両Cと情報を共有する車両がある場合には(ステップS29でYes)、情報共有車両通知部58が、情報共有車両に決定された各車両にその旨を通知するとともに(ステップS30)、他移動体データ通知部59が、この対象物データを他移動体データとして情報を共有する車両に通知する(ステップS31)。その後、ステップS21に移行し、一連の処理を繰り返す。
なお、ステップS23、S25、S27、S29でNoの場合には、ステップS21に移行し、一連の処理を繰り返す。
【0075】
(各手法の詳細説明)
続いて、車両C1,C2,C3および移動体Mが図6に示す配置状態であるときを例にとり、探索開始判定部54による情報共有車両の探索開始判定、近傍車両抽出部55による近傍車両の抽出、および、視野重複判定部56による視野重複の判定、の手法についてさらに詳しく説明する。図6は、情報共有車両の探索開始判定、近傍車両の抽出および視野重複の判定の手法の一例を説明するための図である。
【0076】
(探索開始判定)
まず、車両管理装置3の探索開始判定部54による情報共有車両の探索開始判定の手法の一例について説明する。
図6に示すように、車両管理装置3の記憶部62に記憶された地図データには、道路の交差点(信号)が、ノードNとして設定されている。
探索開始判定部54は、移動体Mを検出した車両C1について、車両C1から送信された車両データに含まれる位置データおよび車両速度データと、地図データにおけるノードNの位置データと、に基づいて、車両C1に関する余裕停止距離Lを算出する。
L = (Tc + Ti)×VC1 +Ls ・・・(1)
ここで、
Tc:通信確立+他車両情報取得に要する時間
Ti:画像処理時間
VC1:車両C1の現在車両速度(ノードNに近づく方向を「正」、ノードNから離れる方向を「負」とする。)
Ls:車両C1の現在車両速度に基づく停止距離
である。
【0077】
この余裕停止距離Lは、車両間通信システム1の通信などに要する時間を考慮し、車両C1がノードNの手前で停止できる距離である。
探索開始判定部54は、車両C1とノードNとの距離LC1が余裕停止距離L以下となった場合に、車両C1に対する情報共有車両の探索を行うように判定する。すなわち、探索開始判定部54は、移動体Mを検出した車両C1が所定条件でノードN(交差点)に接近している場合に、情報共有車両の探索を開始する必要があると判定する。
なお、停止距離Lsは、天候条件(乾燥路面、湿潤路面)、車両条件(ABSの有無)、タイヤ条件(夏用タイヤ、スタッドレス)などの走行環境によって変化し、これら走行環境と停止距離Lsとの関係が記憶部23に予め記憶されている。そして、走行環境は、車両センサ16または図示しない入力装置から各車両Cの主制御部30に入力され、車両データの一部として車両管理装置3に送信される。
また、走行環境に関するデータ(走行環境データ)を取得する走行環境データ取得部と、走行環境データを車両管理装置3に通知する走行環境データ通知部と、を主制御部30内に備え、走行環境データと車両データとを別に処理する構成であっても良い。
【0078】
図7は、余裕停止距離を説明するためのグラフである。
図7(a)は、天候条件が「乾燥路面」である場合における、車両条件およびタイヤ条件ごとの停止距離Lsおよび余裕停止距離Lを表すグラフである。図7(b)は、路面条件が「湿潤路面」である場合における、車両条件およびタイヤ条件ごとの停止距離Lsおよび余裕停止距離Lを表すグラフである。
ここで、停止距離Ls1〜Ls4および余裕停止距離L1〜L4の条件設定は、以下の通りである。
Ls1,L1:タイヤ条件「夏用タイヤ装着」、車両条件「ABS付き」
Ls2,L2:タイヤ条件「夏用タイヤ装着」、車両条件「ABS無し」
Ls3,L3:タイヤ条件「スタッドレスタイヤ装着」、車両条件「ABS付き」
Ls4,L4:タイヤ条件「スタッドレスタイヤ装着」、車両条件「ABS無し」
図7(a)(b)に示すように、停止距離Lsは、天候条件(路面条件)によって異なる値をとる。また、それに従い、余裕停止距離Lも天候条件によって異なる。また、停止距離Lsは、天候条件だけでなく、車両条件(ABSの有無)、タイヤ条件(夏用タイヤ、スタッドレスタイヤ)などによっても変化し、記憶部23は、これらの対応関係を記憶している。
そして、記憶部23は、天候条件、車両条件、タイヤ条件などに基づく停止距離Lsを記憶しているとともに、時間Tc,Tiが設定されているため、探索開始判定部54は、これらと車両速度VC1とに基づいて、車両速度VC1を制動初速度とした余裕停止距離Lを算出することができる。
なお、車載装置2は、車両間通信システム1と接続されたカーナビゲーションシステムや、車両Cに搭載された雨滴センサの検出結果から天候条件を取得することができる。
また、車載装置2は、車両CがABS搭載車両である場合には、スリップ検出に基づいて天候条件を判定することもできる。
また、車載装置2は、車両Cのワイパの作動状況に基づいて天候条件を判定することもできる。
また、車載装置2は、図示しない入力装置から車両条件およびタイヤ条件を入力可能である。
【0079】
(近傍車両抽出)
続いて、車両管理装置3の近傍車両抽出部55による近傍車両の抽出の手法の一例について説明する。
近傍車両抽出部55は、探索開始判定部54が情報共有車両の探索を開始する必要があると判定した場合に、車両C1の近傍の車両を抽出する。
近傍車両抽出部55は、車両データ受信部51によって受信されて記憶部62に記憶された各車両Cの車両位置データに基づいて、車両C1から所定距離内、すなわち、図6に示す近傍車両抽出領域EA内に位置する他の車両Cを抽出する。ここでは、車両C2および車両C3が抽出される。
このように、情報共有車両の決定の前処理として、近傍車両抽出部55が車両C1の近傍に位置する車両C2,C3を抽出するので、遠方の車両Cを無視することができ、情報共有車両決定における処理を簡略化することができる。
【0080】
(視野重複判定)
続いて、車両管理装置3の視野重複判定部56による視野重複の判定の手法の一例について説明する。
視野重複判定部56は、近傍車両抽出部55が車両C1の近傍の車両C(C2,C3)を抽出した場合に、車両C1の視野DA1と近傍の車両C(C2,C3)の視野DA2,DA3との重複割合を算出する。
そして、情報共有車両決定部57は、記憶部62に記憶された各車両Cのデータ(カメラの撮像領域または移動体検出領域)に基づいて、車両C1の撮像領域DA1の50%以上を自身の撮像領域(ここでは、車両C2の撮像領域DA2が該当する。車両C3の撮像領域DA3は該当しない。)として重複する車両Cを、車両C1と情報を共有する車両に決定する。ここでは、車両C2が車両C1にとっての情報共有車両であり、車両C3は情報共有車両に該当しない。
かかる撮像領域の重複の割合は、適宜設定変更可能である。
また、撮像領域の先端部は、適宜設定変更可能である。この撮像領域の先端部の設定によって、情報共有車両の選出結果を調節可能である。なお、図6以降に図示された撮像領域の大きさと車両との関係は、発明を説明するためにデフォルメされており、実際の関係を正確に表したものではない。
【0081】
(出会い判定)
続いて、出会い判定部40による車両Cと他移動体との出会い判定について説明する。図8は、車両と移動体との出会い判定について説明するための図である。
図8に示すように、車両C1と車両C2とが共通のノード(交差点)Nに向かって走行している。そして、車両C1が移動体Mを撮影している。
車両C2の出会い判定部40は、ローカルマップに基づいて、自車両C2と他移動体MとがノードNを通過する時刻の差Ts(以下、「余裕時間Ts」と記載する。)を算出する。
余裕時間Tsは、下記式(2)によって算出される。
Ts = |LM/VM−LC2/VC2| ・・・(2)
ここで、
LM:他移動体MのノードNまでの距離
VM:他移動体MのノードNに向かう速度
LC2:自車両C2のノードNまでの距離
VC2:自車両C2の車両速度
である。
【0082】
すなわち、出会い判定部40は、他移動体Mの移動体位置データ、移動体方向データおよび移動体速度データと、自車両C2の車両位置データ、車両向きデータおよび車両速度データと、地図データにおけるノードNの位置データと、に基づいて、他移動体Mと自車両C2との出会いを判定している。
【0083】
なお、車両C2が走行中の道路の法定速度をV0とし、V1=V0+ΔV0(ΔV0はV0の20%)としたとき、余裕時間Tsおよび前記した余裕停止距離Lの算出において、自車両C2の車両速度VC2として、V0またはV1を代用することも可能である。これは、何らかの理由(例えば、カーブ通過中で減速中など)でその時点での車両速度の実測値が、V1から外れている場合などが考えられ、このような場合には、V0またはV1で算出した方が好ましいと考えられるためである。
そして、車両C2の車両速度VC2がV1よりも大きいとき、文字データ生成部41bが、この旨を伝える文字データを生成し、表示装置20に表示させることもできる。
表示例としては、例えば、「スピードが出過ぎています。」などである。また、音声データ生成部41dが、文字データと同様の内容を伝える音声データを生成し、スピーカ21に発話させることもできる。
【0084】
出会い判定部40は、余裕時間Tsの値に基づいて、移動体Mと車両C2との出会い可能性を、4段階に分けて判定する。
(1)Ts≧30secのときには、出会い判定部40は、移動体Mと車両C2との出会い可能性「なし」と判定する。
(2)20sec≦Ts<30secのときには、出会い判定部40は、移動体Mと車両C2との出会い可能性「小」と判定する。
(3)10sec≦Ts<20secのときには、出会い判定部40は、移動体Mと車両C2との出会い可能性「中」と判定する。
(4)Ts<10secのときには、出会い判定部40は、移動体Mと車両C2との出会い可能性「大」と判定する。
そして、文字データ生成部41bおよび音声データ生成部41dは、余裕時間Tsの値に基づいて文字データおよび音声データを生成して表示装置20およびスピーカ21に出力し、表1に示す情報を運転者に通知する。
【0085】
【表1】
【0086】
減速指示の例としては、「スピードを落としてください。」が挙げられる。
徐行指示の例としては、「徐行してください。」が挙げられる。
停止指示の例としては、「停止してください。」が挙げられる。
【0087】
他移動体通行方向案内の例としては、「左から自転車が近づいています。」が挙げられる。
他移動体通行状況案内の例としては、「○秒後に前方交差点に自転車が左から進入します。」が挙げられる。
これら運転手への指示と他移動体Mの案内とが、出会い判定部40による判定結果を知らせるデータの一例である。その他、音声データ生成部41dが運転手への指示を含む音声データを生成しても良く、文字データ生成部41bが移動体Mの案内(通行方向案内、通行状況案内)を含む文字データを生成しても良い。
【0088】
また、余裕時間Tsが5秒以下のとき、制御データ生成部41eが車両制御装置22を駆動してブレーキを利かせ、自車両Cを停止させることが望ましい。
【0089】
なお、余裕時間Tsが表1に示す範囲内であっても、距離LM,LC2が図7に示す範囲外である場合には、表1に示す警報を発生しないようにすることが望ましい。なお、距離LMを使用するのは、移動体Mが車両である場合であり、自転車、人などの場合は除く。
これは、距離LM,LC2が短すぎる場合(第一の所定値よりも小さい場合)には、警報を発生しても運転者が対応する余裕がなく、却って混乱を招くおそれがあるためである。また、距離LM,LC2が長すぎる場合(第二の所定値よりも大きい場合)には、警報を発生しなくても運転者が対応することが可能であると考えられるためである。この距離LM,LC2の範囲を考慮するか否かは、車両C2、他移動体Mの走行道路によるものであり、その関係を表2に示す。
【0090】
【表2】
【0091】
また、これら第一の所定値および第二の所定値を走行環境によって変化させる構成であっても良い。この場合には、第一の所定値および第二の所定値と走行環境との関係が記憶部23に予め記憶されていることが望ましい。
【0092】
続いて、車両C1および車両C2が情報共有車両に設定された場合を例にとり、車両C2における移動体Mの画像表示について説明する。
図9は、本発明の実施形態に係る車両間通信システムの第一の動作例に基づく作用を説明するための図であり、車両C1、車両C2および移動体Mの配置状態を説明するための図である。図10は、図9の平面図である。図11は、車両C1のカメラによって撮影された画像を示す図である。図12は、車両C2のカメラによって撮影された画像を示す図である。図13は、移動体の画像の補正を説明するための図であり、(a)は補正前を示す図、(b)は補正後を示す図である。図14は、車両C2の表示装置に表示された移動体画像を示す図である。
【0093】
図9および図10に示すように、車両C1は、ノードNに向かって走行している。また、車両C2は、車両C2とは別の道(アーク)においてノードNに向かって走行している。また、移動体Mは、車両C1と同じ道(アーク)においてノードNに向かって走行している。
図11に示すように、車両C1のカメラ11,11は、移動体Mを撮影しており、対象物検出部32が、移動体Mに関する移動体画像MIを検出している。
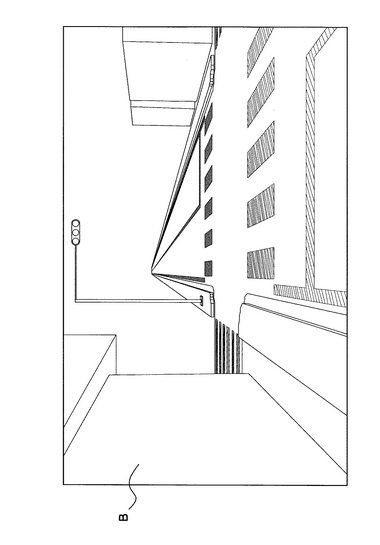
また、図12に示すように、車両C2のカメラ11,11は、建物Bが障害となり、移動体Mを撮影することができていない。
そこで、車両C1の対象物検出部32によって撮影された移動体画像MIが、車両管理装置3を介して車両C2の車載装置2に送信される。車両C2の画像データ生成部41aは、車両C1の車両位置データと、車両C2の車両位置データと、移動体(他移動体)Mの相対位置データと、に基づいて、図13(b)に示す補正された他移動体画像MI’を生成する。ここで、車両C1の車両位置データを利用するのは、車両C1,C2の位置関係によって補正の仕方(反転の有無など)が変わるためである。そして、車両C2の画像データ生成部41aは、カメラ11,11が撮影した画像と、他移動体画像MI’とを合成した画像データを生成し、図14に示すように、表示装置20に表示させる。ここで、画像データ生成部41aは、他移動体画像MI’の合成位置は、他移動体推定データに基づいて決定しており、建物Bがないと仮定した場合に車両C2のカメラ11,11が移動体Mを直接撮像したのに似た画像データを生成している。
このようにすることで、車両C2が検出できなかった移動体Mを、車両C2の表示装置20に表示させ、車両C2の運転者に知らせることができる。
【0094】
また、車両C2の音声データ生成部41dは、他移動体Mの存在を音声で知らせるための音声データを生成し、スピーカ21に発話させる。
発話例としては、「左前方に自転車がいます。」などである。
このようにすることで、車両C2が検出できなかった移動体Mを、車両C2の運転者に音声で知らせることができる。
【0095】
また、文字データ生成部41bは、出会い判定部40の判定結果を文字として表示装置20に表示させる。
また、音声データ生成部41dは、出会い判定部40の判定結果を音声としてスピーカ21に発話させる。
【0096】
(タイミングチャート)
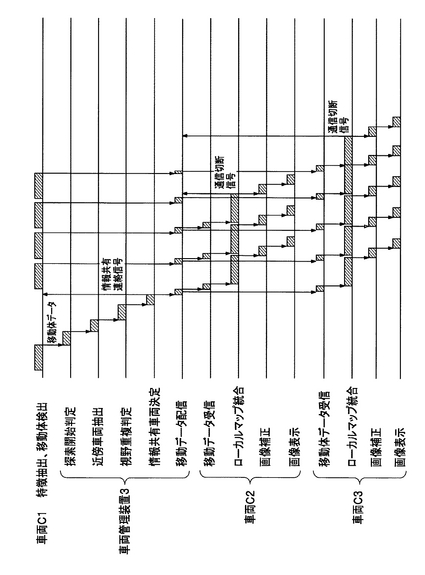
図15は、車両間通信システムの第一の動作例に基づく通信例を示すタイミングチャートである。
まず、車両C1の車載装置2が、前方の画像について特徴抽出および対象物検出を行う。そして、車両C1の車載装置が、対象物データの一種である移動体データを車両管理装置3に送信する。
移動体データを受信した車両管理装置3は、探索開始判定、近傍車両抽出、視野重複判定および情報共有車両決定を順に行い、情報共有車両に決定された車両C(ここでは、車両C2,C3)に他移動体データおよび情報共有連絡信号を送信する。
他移動体データを受信した車両C2,C3の車載装置2は、他移動体データに関して、ローカルマップ統合、画像補正、画像表示を順に行う。
そして、一旦情報共有車両として決定されると、その後、車両管理装置3は、探索開始判定、近傍車両抽出、情報共有車両決定を省略することもできる。なお、これらを省略しない構成も可能である。
また、車両C2,C3の車載装置2は、自身のカメラ11,11が他移動体を撮像するようになったときに、通信切断信号を車両管理装置3へ送信する。かかる通信切断信号は、対象物データ通知部34によって生成、出力される。
また、車両管理装置3が、車両C1と車両C2,C3との撮像領域の重複がなくなったときに、通信切断信号を車両C1,C2,C3の車載装置2へ送信する構成であっても良い。
【0097】
前記したように、車両間通信システム1は、車両C2の車載装置2が、自身で検出できなかった移動体Mについてのデータを車両C1から受信することで、車両C2の表示装置20に移動体Mを表示することができ、車両C2のスピーカ21に移動体Mの存在および存在位置を発話させることができる。
また、車両間通信システム1は、車両C2と移動体Mとの出会い判定を行い、その判定結果を車両C2の表示装置20およびスピーカ21に出力することができる。
したがって、車両間通信システム1は、車両C2のカメラ11,11が撮像できなかった移動体Mの存在および存在位置を、画像、文字、音声の少なくとも一つを用いて車両C2の運転者に知らせることができる。
また、車両間通信システム1は、移動体Mと車両C2とが出会う可能性を、画像、文字、音声の少なくとも一つを用いて車両C2の運転者に知らせることができる。
【0098】
(車両間通信システムの第二の動作例)
続いて、車両間通信システム1の第二の動作例について説明する。なお、車両管理装置3の動作例は、図5に示したものと同一であるため、車載装置2の動作例のみについて説明する。
【0099】
(車載装置の第二の動作例)
車載装置2の第二の動作例について説明する。図16は、車載装置の第二の動作例を説明するためのフローチャートである。
まず、対象物データ通知部34がフラグを「0」に設定する(ステップS41)。
このフラグは、車両Cの車載装置2の通信相手を定めるものであり、フラグが「0」のときには、車載装置2と車両管理装置3とが接続される。また、フラグが「1」のときには、車載装置2と車両管理装置3とが切断されるとともに、自車両Cの車載装置2と他の車両Cの車載装置2とが接続される。これら通信接続/切断は、公知の技術により行われる。
【0100】
ステップS42〜ステップS48は、図4のステップS2〜ステップS8と同一動作であるので、説明を省略する。
【0101】
ステップS48までの処理終了後、フラグが「0」である場合には(ステップS49でNo)、データ受信部37が、車両管理装置3から他移動体データおよび情報共有車両通知信号を受信する(ステップS50)。
情報共有車両がある場合には(ステップS51でYes)、対象物データ通知部34がフラグを「1」に設定する(ステップS52)。
また、ステップS49でYesの場合には、データ受信部37が、情報共有車両から他移動体データを受信する(ステップS53)。
そして、ステップS52またはステップS53の後、他移動体データがある場合には(ステップS54でYes)、ステップS55〜ステップS58を行う。これらステップS55〜ステップS58は、図4のステップS11〜ステップS14と同一動作であるので、説明を省略する。
ステップS54でNoの場合には、対象物データ通知部34がフラグを「0」に設定する(ステップS59)。ステップS51でNoの場合、ステップS58の処理後およびステップS59の処理後には、ステップS42に移行し、一連の処理を繰り返す。
【0102】
このようにすることで、一旦情報共有車両として設定された車両同士は、その後車両管理装置3を介さずに通信することができる。したがって、他移動体データの通信に要する時間を短縮することができる。
【0103】
(車両間通信システムの第三の動作例)
続いて、車両間通信システム1の第三の動作例について説明する。図17は、車両間通信システムの第三の動作例を説明するためのフローチャートである。なお、第三の動作例は、図9および図10に示す状況に適用される。
車両C2がノード(交差点)Nに接近しているときに、探索開始判定部54が、各車両Cから送信された車両データに基づいて、探索を行うと判定し(ステップS61でYes)、近傍車両抽出部55が、同一ノードNに接近する車両があるかを判定する(ステップS62)。
近傍車両抽出部55が車両C1を抽出すると(ステップS62でYes)、情報共有車両決定部56が車両C1,C2を情報共有車両に決定し、情報共有車両通知部58が、情報共有連絡信号を車両C1,C2に通知する。
そして、車両C1の近傍に移動体Mがいる場合には(ステップS63でYes)、車両C1の対象物検出部32が移動体Mを検出し(ステップS64)、車両C1の対象物データ通知部34が移動体Mに関する移動体データを車両C2の車載装置2に通知する(ステップS65)。
そして、車両C2の表示装置20が移動体Mを表示する(ステップS66)。
【0104】
なお、第三の動作例以降の動作例においても、音声による移動体Mの位置の通知や、音声、画像および文字のいずれかによる出会い判定結果の通知を行うことができる。
【0105】
(車両間通信システムの第四の動作例)
続いて、車両間通信システム1の第四の動作例について説明する。図18は、車両間通信システムの第四の動作例の状況説明図である。図19は、車両間通信システムの第四の動作例を説明するためのフローチャートである。
第四の動作例は、図18に示すように、トラックなどの大型車である車両C4が交差点に進入している場合に適用される。車両C4の車載装置2は、その前方、後方、左側方および右側方を撮影するためのカメラを備えており、撮像領域DA41,DA42,DA43,DA44を撮影可能となっている。
まず、探索開始判定部54が、車両C2がノードに接近していると判定すると(ステップS81でYes)、近傍車両抽出部55が、車両C2の前方に車両があるか否かを判定する(ステップS82)。
そして、車両C2の近傍に車両C4がいる場合には(ステップS82でYes)、情報共有車両決定部56が車両C2,C4を情報共有車両に決定し、情報共有車両通知部57が、情報共有連絡信号を車両C2,C4に通知する。
そして、車両C4の近傍に移動体Mがいる場合には(ステップS83でYes)、車両C4の対象物検出部32が移動体Mを検出し(ステップS84)、車両C4の対象物データ通知部34が移動体Mに関する移動体データを車両C2の車載装置2に通知する(ステップS85)。
そして、車両C2の表示装置20が移動体Mを表示する(ステップS86)。
【0106】
なお、ステップS81における交差点への接近判定のかわりに、横断歩道への接近判定を行っても良い。
また、ステップS81、ステップS82の判定に、車両C2の車載装置2における対象物検出部32の検出結果を利用しても良い。
また、この第四の動作例以降の動作例においては、情報共有車両決定部56は、撮影領域の重複を判断することなく情報共有車両を決定することができる。
【0107】
(車両間通信システムの第五の動作例)
続いて、車両間通信システム1の第五の動作例について説明する。図20は、車両間通信システムの第五の動作例の状況説明図である。図21は、車両間通信システムの第五の動作例を説明するためのフローチャートである。
第五の動作例は、図20に示すように、車両C2の対向車線側にバスである車両C5がバス停BSに停車している場合に適用される。車両C5の車載装置2は、その前方および後方を撮影するためのカメラを備えており、撮像領域DA51,DA52を撮影可能となっている。
まず、探索開始判定部54が、車両C2が車両C5とすれ違おうとしていると判定し(ステップS101でYes)、かつ、車両C5が停車中であると判定すると(ステップS101でYes)、情報共有車両決定部56が車両C2,C5を情報共有車両に決定する。
そして、車両C5の近傍に移動体Mがいる場合には(ステップS103でYes)、車両C5の対象物検出部32が移動体Mを検出し(ステップS104)、車両C5の対象物データ通知部34が移動体Mに関する移動体データを車両C2の車載装置2に通知する(ステップS106)。
そして、車両C2の表示装置20が移動体Mを表示する(ステップS106)。
【0108】
(車両間通信システムの第六の動作例)
続いて、車両間通信システム1の第六の動作例について説明する。図22は、車両間通信システムの第六の動作例の状況説明図である。図23は、本発明の実施形態に係る車両間通信システムの第七の動作例を説明するためのフローチャートである。
第六の動作例は、図22に示すように、車両C2がバス停BSに停車中のバスである車両C5を追い越そうとする場合に適用される。
まず、探索開始判定部54が、車両C2が車両C5を追い越そうとしていると判定すると(ステップS121でYes)、情報共有車両決定部56が車両C2,C5を情報共有車両に決定する。
そして、車両C5の近傍に移動体Mがいる場合には(ステップS122でYes)、車両C5の対象物検出部32が移動体Mを検出し(ステップS123)、車両C5の対象物データ通知部34が移動体Mに関する移動体データを車両C2の車載装置2に通知する(ステップS124)。
そして、車両C2の表示装置20が移動体Mを表示する(ステップS125)。
【0109】
(車両間通信システムの第七の動作例)
続いて、車両間通信システム1の第七の動作例について説明する。図24は、車両間通信システムの第七の動作例の状況説明図である。図25は、車両間通信システムの第七の動作例を説明するためのフローチャートである。
第七の動作例は、図24に示すように、車両C2の同一車線前方にトラックなどの大型車である車両C4が走行している場合に適用される。
まず、探索開始判定部54が、車両C4が車両C2の前方を走行していると判定すると(ステップS141でYes)、情報共有車両決定部56が車両C2,C4を情報共有車両に決定する。
そして、車両C4の近傍に移動体Mがいる場合には(ステップS142でYes)、車両C4の対象物検出部32が移動体Mを検出し(ステップS143)、車両C4の対象物データ通知部34が移動体Mに関する移動体データを車両C2の車載装置2に通知する(ステップS144)。
そして、車両C2の表示装置20が移動体Mを表示する(ステップS145)。
【0110】
(第八の動作例)
続いて、車両間通信システム1の第八の動作例について説明する。第八の動作例は、前記した第五ないし第七の動作例と組み合わせて実施可能であり、また、第五ないし第七の動作例と同一状況において、第八の動作例を単独で実施することも可能である。ここでは、第八の動作例を第五の動作例と同一状況で単独に実施した場合を例にとって説明する。
図26は、車両間通信システムの第八の動作例を説明するための状況説明図である。図27および図28は、車両間通信システムの第八の動作例を示すフローチャートである。
なお、図26では、各車両の撮像領域を省略している。また、記憶部23,62に記憶された地図データには、ノードN同士を繋ぐアークArが道路中央に設定されており、車両間通信システム1は、このアークArを利用する。
【0111】
まず、車両C4の対象物検出部32が移動体Mを検出すると(ステップS161でYes)、車両管理装置3の情報共有車両決定部57は、近傍車両抽出部55によって抽出された車両Cの中から情報共有車両を決定する。そして、情報共有車両に決定された車両C5,C2間で通信を行う。ここでは、車両C5に関する各種データと移動体Mに関する各種データとが、車両C5の車載装置2から車両C2の車載装置2に送信される。そして、車両C2の車載装置2は、検出された移動体Mの数iの分だけ、ステップS162〜ステップS172の処理を行うループに入る。なお、図26には、一つの移動体Mのみが図示されている。
【0112】
そして、i番目の移動体Mが車両C2とアークArを共有している場合には(ステップS163でYes)、車両C2の出会い判定部40が、i番目の移動体Mの現在位置とアークArとが直交する点Pの位置を算出する(ステップS164)。なお、ステップS163でNoの場合には、次の移動体Mについての処理に移行する。
そして、車両C5と車両C2との距離dが所定距離ε(例えば、ε=50m)よりも短い場合には(ステップS165でYes)、j番目の車両C2の出会い判定部40が、j番目の車両C4とアークArとが直交する点Qの位置を算出する(ステップS166)。
そして、車両C2の出会い判定部40が、車両C2が点Pに到達するのに要する時間tpを算出する(ステップS167)。時間tPは、下記式(3)によって算出される。
tp=|Q−P|/VC2−α ・・・(3)
(αはマージン。車両C2が加速する場合を考慮し、車両C2が点Pにやや早く到達することを想定している。)
そして、i番目の移動体Mの移動速度VMがほぼ0(例えば、時速2km以下)のときには(ステップS168でYes)、出会い判定部40は、移動体Mの現在位置と点Pとの距離dMPが条件式(4)を満たすか否かを判定する(ステップS169)。
dMP<Vmax×tp ・・・(4)
(Vmaxは、移動体Mの最大速度であり、移動体Mの種類ごとに予め記憶部23に記憶されている。)
距離dMPが条件式(4)を満たす場合には(ステップS169でYes)、画像データ生成部41aが移動体Mを表示する画像データを生成するとともに、音声データ生成部41dが移動体Mとの出会い可能性に基づく警報(減速指示、徐行指示など)を知らせる音声データを生成する。これらのデータは、表示装置20およびスピーカ21を介して運転者に通知される(ステップS170)。
距離dMPが条件式(4)を満たさない場合には(ステップS169でNo)、画像データ生成部41aが移動体Mを表示する画像データを生成する。画像データは、表示装置20を介して運転者に通知される(ステップS171)。
【0113】
また、ステップS168でNoの場合には、移動体Mの未来位置である点Mfを算出する(ステップS181)。この点Mfの算出は、例えば、カルマンフィルタによる移動体Mの位置推定を tP/Δt 回(ここで、Δtはカルマンフィルタの計算サイクルタイム)繰り返し実施することによって行われる。
そして、出会い判定部40は、点Mと点Mfとを結ぶ線分LMMfとアークArとが交わるか否かを判定する(ステップS182)。
【0114】
ステップS182でYesの場合には、画像データ生成部41aが移動体Mを表示する画像データを生成するとともに、音声データ生成部41dが移動体Mとの出会い可能性に基づく警報(減速指示、徐行指示など)を知らせる音声データを生成する。これらのデータは、表示装置20およびスピーカ21を介して運転者に通知される(ステップS183)。
ステップS182でNoの場合には、画像データ生成部41aが移動体Mを表示する画像データを生成する。画像データは、表示装置20を介して運転者に通知される(ステップS183)。
【0115】
このように、移動体Mの移動速度VMの値によって、その後の処理を変えたのは、以下の理由による。
移動体Mの移動速度VMがほぼゼロの場合には、移動体Mのその後の移動を推定しにくい。そのため、車両C2の車載装置2は、移動体Mが車両C2と出会う方向へ最速移動を行うことを想定した処理を行う。
また、移動体Mの移動速度VMがある程度大きい(ゼロではない)場合には、移動体Mのその後の移動を推定しやすい。そのため、車両C2の車載装置2は、かかる推定を利用した処理を行う。
【0116】
なお、ステップS170,S171,S183,S184において、車載装置2は、文字情報による運転者への通知を使用することもできる。
【0117】
また、車両C2の後続車両Cがある場合には、車両管理装置3の情報共有車両決定部57によって決定された情報共有車両ごとにこれらの処理を行うこともできる。
【0118】
なお、第八の動作例を単独実施する場合は、第五ないし第七の動作例と組み合わせて実施する場合と比較して、移動体Mを検出した場合にのみ近傍車両の抽出を行えば良く、システムの処理速度を高めることができる。
【0119】
以上、本発明の実施形態について説明したが、本発明は前記した各実施形態に限定されず、本発明の要旨を逸脱しない範囲で適宜設計変更可能である。
例えば、車両管理装置3が出会い判定部を備えている構成であってもよい。
また、車両管理装置3の構成の一部または全部を、各車両の車載装置2に組み込んだ構成であっても良く、車載装置2の主制御部30内の構成の一部または全部を、車両管理装置3に組み込んだ構成であっても良い。また、車両位置データ検出手段は、GPS受信器に限定されない。また、各種データは、それと同一の意味を持つ物理量によるデータに置換可能である。
また、撮像領域の設定や、近傍車両抽出領域EAの広さは、適宜設定可能である。
また、移動体Mの画像の代わりに、移動体Mを表すマークや合成画像を表示装置に表示させる構成であっても良い。
また、当該車両のカメラが撮影した画像に他の車両のカメラが撮影した移動体画像を合成するだけでなく、カーナビゲーションシステムによる地図画像に他の車両のカメラが撮影した移動体画像を合成する構成であっても良い。
また、画像データ生成部が出会い判定部の判定結果を表示するための画像データを生成し、出力する構成であっても良い。さらには、文字データ生成部および画像データ生成部が出会い判定結果を表示するための文字データおよび画像データを生成し、文字および画像によって出会い判定結果を運転者に知らせる構成であっても良い。
また、ローカルマップ生成部39などによる各種データの推定(現在データへの変換)は、適宜設定可能である。
【図面の簡単な説明】
【0120】
【図1】本発明の実施形態に係る車両間通信システムを示すシステム構成図である。
【図2】図1の車載装置を示すブロック図である。
【図3】図1の車両管理装置を示すブロック図である。
【図4】車載装置の第一の動作例を説明するためのフローチャートである。
【図5】車両管理装置の第一の動作例を説明するためのフローチャートである。
【図6】情報共有車両の探索開始判定、近傍車両の抽出および視野重複の判定の手法の一例を説明するための図である。
【図7】余裕停止距離を説明するためのグラフである。
【図8】出会い判定を説明するための図である。
【図9】車両間通信システムの第一の動作例に基づく作用を説明するための図であり、車両C1、車両C2および移動体Mの配置状態を説明するための図である。
【図10】図9の平面図である。
【図11】車両C1のカメラによって撮像された画像を示す図である。
【図12】車両C2のカメラによって撮像された画像を示す図である。
【図13】移動体の画像の補正を説明するための図であり、(a)は補正前を示す図、(b)は補正後を示す図である。
【図14】車両C2の画像に車両C1が撮影した移動体を合成した画像を示す図である。
【図15】車両間通信システムの第一の動作例における車載システムおよび車両管理システム間の通信を示すタイミングチャートである。
【図16】車載装置の第二の動作例を説明するためのフローチャートである。
【図17】車両間通信システムの第三の動作例を説明するためのフローチャートである。
【図18】車両間通信システムの第四の動作例を説明するための状況説明図である。
【図19】車両間通信システムの第四の動作例を説明するためのフローチャートである。
【図20】車両間通信システムの第五の動作例を説明するための状況説明図である。
【図21】車両間通信システムの第五の動作例を説明するためのフローチャートである。
【図22】車両間通信システムの第六の動作例を説明するための状況説明図である。
【図23】車両間通信システムの第六の動作例を説明するためのフローチャートである。
【図24】車両間通信システムの第七の動作例を説明するための状況説明図である。
【図25】車両間通信システムの第七の動作例を説明するためのフローチャートである。
【図26】車両間通信システムの第八の動作例を説明するための状況説明図である。
【図27】車両間通信システムの第八の動作例を説明するためのフローチャートである。
【図28】車両間通信システムの第八の動作例を説明するためのフローチャートである。
【符号の説明】
【0121】
1 車両間通信システム
2 車載装置
3 車両管理装置
11 カメラ
13 ジャイロセンサ
14 GPS検出器
20 表示装置
23 スピーカ
32 対象物検出部
33 対象物データ生成部
35 車両データ生成部
41a 画像データ生成部
41b 文字データ生成部
41d 音声データ生成部
41e 制御データ生成部
54 探索開始判定部
55 近傍車両抽出部
57 情報共有車両決定部
62 記憶部
【特許請求の範囲】
【請求項1】
車両同士が通信を行う車両間通信システムであって、
車両ごとに設けられた、当該車両の周囲を撮像する撮像手段と、
前記撮像手段によって撮像された画像から移動体を検出する移動体検出部と、
車両ごとに設けられた、音声を発する発音手段と、
前記車両の前記発音手段に発音させる音声に関する音声データを生成する音声データ生成部と、
車両ごとに設けられた、データの送受信を行う送受信手段と、
を備え、
前記音声データ生成部は、一の車両の前記撮像手段によって撮像された移動体の存在を知らせる音声データを生成し、他の車両の前記発音手段に出力することを特徴とする車両間通信システム。
【請求項2】
前記車両の位置に関する車両位置データを検出する車両位置データ検出手段と、
前記撮像手段によって撮像された画像から前記移動体の位置に関する移動体位置データを生成する移動体位置データ生成部と、
をさらに備え、
前記音声データ生成部は、前記移動体位置データに基づいて、一の車両の前記撮像手段によって撮像された前記移動体の存在位置を知らせる音声データを生成し、他の車両の前記発音手段に出力することを特徴とする請求項1に記載の車両間通信システム。
【請求項3】
情報を共有する車両の組み合わせを決定する情報共有車両決定部をさらに備えていることを特徴とする請求項2に記載の車両間通信システム。
【請求項4】
前記情報共有車両決定部は、前記撮像手段の撮像領域に基づいて、前記撮像領域が重なっている車両同士を組み合わせることを特徴とする請求項3に記載の車両間通信システム。
【請求項5】
情報を共有する車両の探索を開始するか否かを判定する探索開始判定部をさらに備え、
前記探索開始判定部が情報を共有する車両の探索を開始すると判定した場合に、前記情報共有車両決定部が情報を共有する車両の組み合わせを決定することを特徴とする請求項3または請求項4に記載の車両間通信システム。
【請求項6】
前記探索開始判定部は、前記車両の前記移動体検出部が移動体を検出した場合に、当該車両に対する情報共有車両の探索を開始するか否かを判定し、
前記情報共有車両決定部は、前記探索開始判定部が当該車両に対する情報共有車両の探索を開始すると判定した場合に、当該車両と情報を共有する車両を決定する
ことを特徴とする請求項5に記載の車両間通信システム。
【請求項7】
地図データを記憶する記憶部をさらに備え、
前記探索開始判定部は、前記車両位置データと、前記地図データと、に基づいて、前記車両が前記地図データにおけるノードに接近しているか否かを判定し、
前記情報共有車両決定部は、前記探索開始判定部が前記車両が前記ノードに接近していると判定した場合に、当該車両と情報を共有する車両を決定する
ことを特徴とする請求項6に記載の車両間通信システム。
【請求項8】
前記車両の近傍に位置する車両を抽出する近傍車両抽出部をさらに備え、
前記情報共有車両決定部は、前記近傍車両抽出部によって抽出された車両の中から、情報を共有する車両を決定する
ことを特徴とする請求項7に記載の車両間通信システム。
【請求項1】
車両同士が通信を行う車両間通信システムであって、
車両ごとに設けられた、当該車両の周囲を撮像する撮像手段と、
前記撮像手段によって撮像された画像から移動体を検出する移動体検出部と、
車両ごとに設けられた、音声を発する発音手段と、
前記車両の前記発音手段に発音させる音声に関する音声データを生成する音声データ生成部と、
車両ごとに設けられた、データの送受信を行う送受信手段と、
を備え、
前記音声データ生成部は、一の車両の前記撮像手段によって撮像された移動体の存在を知らせる音声データを生成し、他の車両の前記発音手段に出力することを特徴とする車両間通信システム。
【請求項2】
前記車両の位置に関する車両位置データを検出する車両位置データ検出手段と、
前記撮像手段によって撮像された画像から前記移動体の位置に関する移動体位置データを生成する移動体位置データ生成部と、
をさらに備え、
前記音声データ生成部は、前記移動体位置データに基づいて、一の車両の前記撮像手段によって撮像された前記移動体の存在位置を知らせる音声データを生成し、他の車両の前記発音手段に出力することを特徴とする請求項1に記載の車両間通信システム。
【請求項3】
情報を共有する車両の組み合わせを決定する情報共有車両決定部をさらに備えていることを特徴とする請求項2に記載の車両間通信システム。
【請求項4】
前記情報共有車両決定部は、前記撮像手段の撮像領域に基づいて、前記撮像領域が重なっている車両同士を組み合わせることを特徴とする請求項3に記載の車両間通信システム。
【請求項5】
情報を共有する車両の探索を開始するか否かを判定する探索開始判定部をさらに備え、
前記探索開始判定部が情報を共有する車両の探索を開始すると判定した場合に、前記情報共有車両決定部が情報を共有する車両の組み合わせを決定することを特徴とする請求項3または請求項4に記載の車両間通信システム。
【請求項6】
前記探索開始判定部は、前記車両の前記移動体検出部が移動体を検出した場合に、当該車両に対する情報共有車両の探索を開始するか否かを判定し、
前記情報共有車両決定部は、前記探索開始判定部が当該車両に対する情報共有車両の探索を開始すると判定した場合に、当該車両と情報を共有する車両を決定する
ことを特徴とする請求項5に記載の車両間通信システム。
【請求項7】
地図データを記憶する記憶部をさらに備え、
前記探索開始判定部は、前記車両位置データと、前記地図データと、に基づいて、前記車両が前記地図データにおけるノードに接近しているか否かを判定し、
前記情報共有車両決定部は、前記探索開始判定部が前記車両が前記ノードに接近していると判定した場合に、当該車両と情報を共有する車両を決定する
ことを特徴とする請求項6に記載の車両間通信システム。
【請求項8】
前記車両の近傍に位置する車両を抽出する近傍車両抽出部をさらに備え、
前記情報共有車両決定部は、前記近傍車両抽出部によって抽出された車両の中から、情報を共有する車両を決定する
ことを特徴とする請求項7に記載の車両間通信システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】

【図19】

【図20】
【図21】
【図22】
【図23】
【図24】
【図25】

【図26】

【図27】
【図28】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【公開番号】特開2006−285693(P2006−285693A)
【公開日】平成18年10月19日(2006.10.19)
【国際特許分類】
【出願番号】特願2005−105449(P2005−105449)
【出願日】平成17年3月31日(2005.3.31)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成18年10月19日(2006.10.19)
【国際特許分類】
【出願日】平成17年3月31日(2005.3.31)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]