
車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラム
【課題】車間距離に対する運転評価を実現することを課題とする。
【解決手段】車両間隔管理装置10は、記憶部11と、選択部12と、取得部13と、判断部14とを有する。記憶部11は、車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する。選択部12は、記憶部11に記憶されたデータテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する。取得部13は、運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する。判断部14は、選択部11により選択されたテンプレートと、取得部13により取得されたナンバープレートの画像とに基づき、運転中の車両と、運転中の車両の前方を走行中の車両との車間距離の適否を判断する。
【解決手段】車両間隔管理装置10は、記憶部11と、選択部12と、取得部13と、判断部14とを有する。記憶部11は、車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する。選択部12は、記憶部11に記憶されたデータテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する。取得部13は、運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する。判断部14は、選択部11により選択されたテンプレートと、取得部13により取得されたナンバープレートの画像とに基づき、運転中の車両と、運転中の車両の前方を走行中の車両との車間距離の適否を判断する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラムに関する。
【背景技術】
【0002】
近年、道路交通法の改正による罰則の強化や燃料費の高騰に伴って、安全運転や経済運転を心がけようとする運転者の数が増加傾向にある。安全運転や経済運転を心がける運転者にとって、前方車両との間に適正な車間距離を保つことは有効な運転テクニックの一つである。
【0003】
このため、安全運転等を支援することを目的として、車間距離を計測する従来技術については色々と提案されている。一例を挙げれば、車両に搭載されたレーザレーダヘッドからレーザ光を測距対象物に照射し、測距対象物からの反射レーザ光を受光するまでの時間を計測することにより車間距離を計測する技術が提案されている。
【0004】
なお、例えば、運転評価に利用することを目的として、運転状況を記録の仕方を車間距離に応じて変更する従来技術も提案されている。例えば、任意の方法により車間距離を計測し、計測した車間距離に基づいて運転者が危険な挙動をとったもの判定できる場合には、ドライブレコーダの記録モードを変更する技術がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−203599号公報
【特許文献2】特開2002−42288号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上述したように、安全運転や経済運転にとって車間距離の確保は重要であるので、車両走行中の車間距離を記録し、車間距離が適正であったか否かを評価する技術の実現が求められている。
【0007】
しかしながら、上述した従来技術を用いても、車間距離が適正であったか否かを評価する技術の実現は難しいというのが現状である。例えば、レーザレーダヘッドを用いて車間距離を計測する技術では、曲がり角では前方車両を検知することできなかったり、道幅が狭い道路では対向車を前方車両として誤検知してしまったりする等の問題がある。このため、いかなる状況においても車間距離を記録できるとは限らないので、車間距離に対する運転評価を行う技術の実現が難しい。
【0008】
開示の技術は、上記に鑑みてなされたものであって、車間距離に対する運転評価を実現することが可能な車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本願の開示する車両間隔管理装置は、一つの態様において、記憶部と、選択部と、取得部と、判断部とを有する。記憶部は、車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する。選択部は、記憶部に記憶されたデータテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する。取得部は、運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する。判断部は、選択部により選択されたテンプレートと、取得部により取得されたナンバープレートの画像とに基づき、運転中の車両と、運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断部とを有する。
【発明の効果】
【0010】
本願の開示する技術の一つの態様によれば、車間距離に対する運転評価を実現できる。
【図面の簡単な説明】
【0011】
【図1】図1は、実施例1に係る車両間隔管理装置を示す図である。
【図2】図2は、実施例2に係る車両の構成を示す図である。
【図3】図3は、実施例2に係る車間距離判定結果記憶部に記憶される情報の構成例を示す図である。
【図4】図4は、実施例2に係るテンプレート記憶部に記憶される情報の構成例を示す図である。
【図5】図5は、実施例2に係る運転評価装置の構成を示す図である。
【図6】図6は、実施例2に係る車両間隔管理部による処理の流れを示す図である。
【図7】図7は、実施例3に係るテンプレート記憶部に記憶される情報の構成例を示す図である。
【図8】図8は、実施例3に係る車両間隔管理部による処理の流れを示す図である。
【図9】図9は、実施例4に係る車両の構成を示す図である。
【図10】図10は、実施例4に係る車両間隔管理部による処理の流れを示す図である。
【図11】図11は、車両間隔管理プログラムの実行するコンピュータの一例を示す図である。
【発明を実施するための形態】
【0012】
以下に、図面を参照しつつ、本願の開示する車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラムの一実施形態について詳細に説明する。なお、以下では、本願の開示する車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラムの一実施形態として後述する実施例により、本願が開示する技術が限定されるものではない。
【実施例1】
【0013】
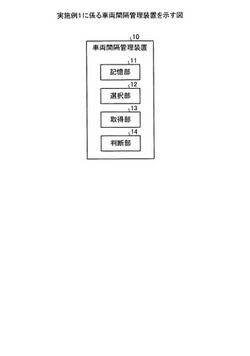
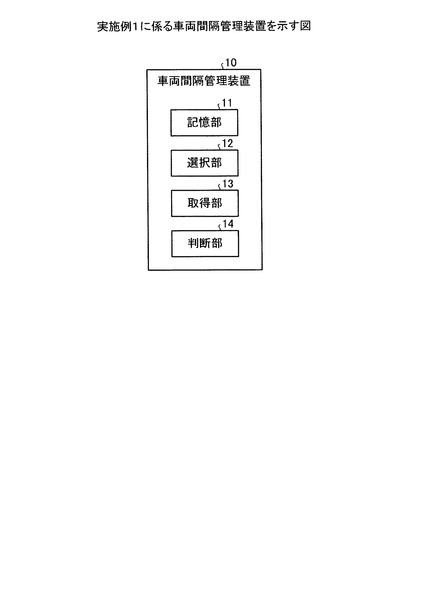
図1は、実施例1に係る車両間隔管理装置を示す図である。図1に示すように、車両間隔管理装置10は、記憶部11と、選択部12と、取得部13と、判断部14とを有する。
【0014】
記憶部11は、車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する。選択部12は、記憶部11に記憶されたデータテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する。取得部13は、運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する。判断部14は、選択部11により選択されたテンプレートと、取得部13により取得されたナンバープレートの画像とに基づき、運転中の車両と、運転中の車両の前方を走行中の車両との車間距離に関する判断をする。
【0015】
車両間隔管理装置10は、例えば、自車両の速度に応じて前方車両との間に確保する必要がある所定の車間距離をとった場合に、自車両のカメラにより撮影される前方車両のナンバープレートを表すテンプレートを自車両の速度ごとに記憶しておく。そして、車両間隔管理装置10は、前方車両のナンバープレートの画像を取得すると、この画像内のナンバープレートのサイズと、自車両の速度に対応するテンプレートのサイズと比較することにより、例えば、車間距離の適否を判断する。
【0016】
このようなことから、実施例1に係る車両間隔管理装置10は、車間距離に対する運転評価を実現できる。
【実施例2】
【0017】
[車両の構成(実施例2)]
図2は、実施例2に係る車両の構成を示す図である。なお、以下では、本願の開示する車両間隔管理装置に対応する各処理機能部を車両に適用した場合の一実施形態について説明する。
【0018】
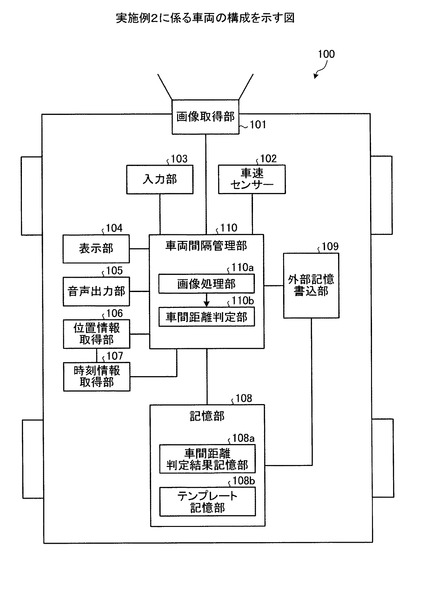
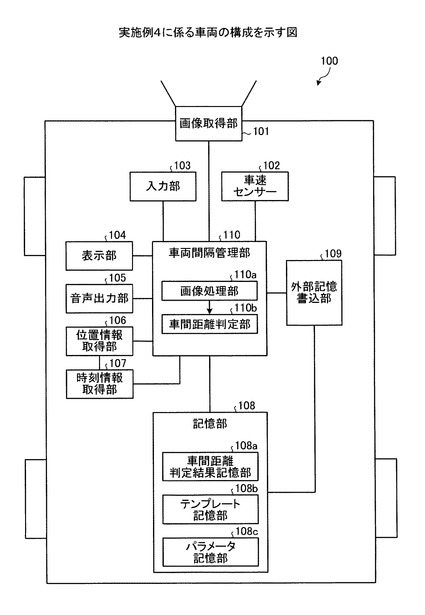
図2に示すように、車両100には、画像取得部101、車速センサー102、入力部103、表示部104、音声出力部105、位置情報取得部106および時刻情報取得部107が搭載される。さらに、車両100には、記憶部108、外部記憶書込部109および車両間隔管理部110が搭載される。
【0019】
画像取得部101は、所定のタイミングで、運転中の自車両の前方を走行中の車両を撮影し、この車両の画像を取得する。以下、運転中の自車両の前方を走行中の車両を「前方車両」と表記する。なお、画像取得部101は、例えば、レンズを有し、レンズから入ってくる画像を写真や動画などの形式で撮影するカメラなどの光学機器に該当する。
【0020】
車速センサー102は、運転中の自車両の走行速度を取得する。なお、運転中の自車両の走行速度は、GPSから取得してもよい。入力部103は、運転者から各種の入力を受け付ける。例えば、入力部103は、運転開始前の運転者から、適正な車間距離を取れていない場合の警告の通知を行う設定の入力を受け付ける。
【0021】
表示部104は、例えば、適正な車間距離が取れていない旨の運転者に通知する警告画面情報など、各種情報を表示出力することにより運転者に提供する。なお、表示部104は、例えば、ディスプレイやモニタであり、タッチパネル機能などを有してもよい。音声出力部105は、例えば、適正な車間距離が取れていない旨の運転者に通知する警告音声など、各種音声を出力することにより運転者に提供する。なお、音声出力部105は、例えば、フロントスピーカやリアスピーカなどである。
【0022】
位置情報取得部106は、例えば、GPS受信機に相当し、GPS人工衛星との通信によって自車両の位置を算出する。位置情報取得部106は、例えば、後述する画像処理装置110aにより前方車両の画像が入力されたタイミングで自車両の位置を算出し、算出した自車両の位置に関する情報を時刻情報取得部107に出力する。なお、位置情報取得部106は、図には示していないナビゲーションシステムに自車両の位置情報を提供することにより、自車両の走行予定経路をナビゲーションシステムに管理させることもできる。
【0023】
時刻情報取得部107は、位置情報取得部106により自車両の位置が算出された時刻の情報を時刻情報提供サービスなどから取得する。時刻情報取得部107は、取得した時刻情報と、位置情報取得部106から取得する自車両の位置に関する情報とを関連付けて車両間隔管理部110に出力する。
【0024】
記憶部108は、車間距離判定結果記憶部108aおよびテンプレート記憶部108bを有する。なお、記憶部108は、例えば、RAM(Random Access Memory)やフラッシュメモリ(flash memory)などの半導体メモリ素子である。
【0025】
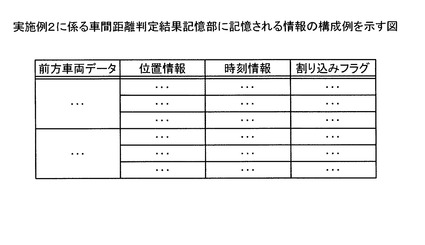
図3は、実施例2に係る車間距離判定結果記憶部に記憶される情報の構成例を示す図である。図3に示す「前方車両データ」とは、画像取得部101により取得された前方車両の画像から取得する車種および車体の色などのデータである。図3に示す「位置情報」とは、位置情報取得部106により算出された自車両の位置に関する情報である。図3に示す「時刻情報」とは、時刻情報取得部107により取得された時刻情報である。図3に示す「割り込みフラグ」とは、前方に車両が割り込んだ場合に、車両間隔管理部110により生成されるフラグである。
【0026】
図3に示すように、車間距離判定結果記憶部108aは、車両間隔管理部110による車間距離判定結果に関する情報として、「前方車両データ」と、「位置情報」と、「時刻情報」と、「割り込みフラグ」とを対応付けて記憶する。
【0027】
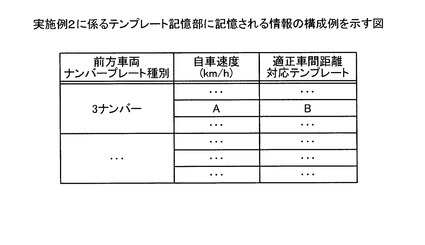
図4は、実施例2に係るテンプレート記憶部に記憶される情報の構成例を示す図である。図4に示す「前方車両ナンバープレート種別」は、画像取得部101により取得された画像に映し出されている前方車両のナンバープレートの種別である。例えば、車両の大きさ、排気量あるいは定員等によって、予めサイズが規格化されているナンバープレートの種別であり、1,2,3,4,5,6,7,8,9,0のいずれかの数字から始まる。一般的に、3から始まるナンバープレートは「3ナンバー」と呼称される。
【0028】
図4に示す「自車速度」は、車速センサー102により取得された運転中の自車両の走行速度である。図4に示す「適正車間距離対応テンプレート」は、前方車両との間に自車両の走行速度に応じた適正な車間距離が確保されている状態で、画像取得部101により取得される画像に映し出された前方車両のナンバープレートのサイズを表すテンプレートである。
【0029】
図4に示すように、テンプレート記憶部108bは、「前方車両ナンバープレート種別」と、「自車速度」と、「適正車間距離対応テンプレート」とを対応付けて記憶する。例えば、テンプレート記憶部108bは、「前方車両ナンバープレート種別」である「3ナンバー」と、走行速度である「A(km/h)」と、適正車間距離対応テンプレートである「B」とを対応付けて記憶する。
【0030】
ここで、適正な車間距離および適正車間距離対応テンプレートについて説明する。適正な車間距離とは、前方車両の制動の影響を受けることなく運転をできる距離、つまり前方車両が急制動を行った場合に危険を回避できる距離を意味するものとし、例えば、自車両が現在の走行速度により2秒間で進む距離を目安とする。例えば、自車両の速度が時速50キロメートルである場合には約28メートル、自車両の速度が時速60キロメートルである場合には約33メートル、自車両の速度が時速80キロメートルである場合には約44メートルとする。
【0031】
そこで、縦165ミリメートル、横330ミリメートルの3ナンバーのナンバープレートを前方車両が有し、自車両の走行速度が時速60キロメートルである場合を例に挙げる。前方車両と自車両から33メートル離れた3ナンバーのナンバープレートを有する前方車両の画像を画像取得部101により取得した場合に、画像内に映し出される3ナンバープレートのサイズを適正車間距離対応テンプレートとする。このようにして、ナンバープレートの種別ごとに、自車両に想定される走行速度に応じた適正車間距離対応テンプレートをそれぞれ取得しておく。
【0032】
外部記憶書込部109は、車間距離判定結果に関するデータを記憶媒体に書き込み、書込み終了後、記憶媒体を外部に排出する。記憶媒体は、例えば、運転者の運転評価を行うユーザにより挿入される。
【0033】
車両間隔管理部110は、画像処理装置110aおよび車間距離判定部110bを有する。
【0034】
画像処理部110aは、画像取得部101により取得された前方車両の画像に関する処理を行う。例えば、画像処理部110aは、画像取得部101から前方車両の画像が入力されると、既存技術を用いて画像処理を行い、画像内に映し出された前方車両の車種および車体の色のデータを取得する。既存技術としては、例えば、パターンマッチング処理やエッジ抽出処理、カラー2値化処理などを適用する。そして、画像処理部110aは、前方車両の車種や車体の色のデータを内部的な記憶部に記録する。
【0035】
また、画像処理部110aは、既存技術を用いて、画像取得部101から入力した前方車両の画像からナンバープレートを切り出す。既存技術としては、例えば、パターンマッチング処理やエッジ抽出処理などを適用する。そして、画像処理部110aは、前方車両のナンバープレートのデータを内部的な記憶部に記録する。
【0036】
車間距離判定部110bは、前方車両との間に適正な車間距離が確保されているか否かを判定する。例えば、車間距離判定部110bは、車速センサー102から自車両の走行速度を入力する。次に、車間距離判定部110bは、画像処理部110aから前方車両のナンバープレートの画像を取り込み、ナンバープレートの種別および自車両の走行速度に対応する適正車間距離対応テンプレートをテンプレート記憶部108bから読み込む。そして、車間距離判定部110bは、画像処理部110aから前方車両のナンバープレートの画像のサイズが、テンプレート記憶部108bから読み込んだ適正車間距離対応テンプレートよりも小さいか否かを判定する。
【0037】
車間距離判定部110bは、判定の結果、前方車両のナンバープレートの画像のサイズが、適正車間距離対応テンプレートよりも小さい場合には、画像処理部110aによって次の前方車両の画像が入力されるのを待機する。
【0038】
一方、車間距離判定部110bは、判定の結果、前方車両のナンバープレートの画像のサイズが、適正車間距離対応テンプレートよりも小さくない場合には、前回入力画像から切り出されたナンバープレートの画像を画像処理部110aから読み込む。そして、車間距離判定部110bは、現入力画像のナンバープレートと、前回入力画像のナンバープレートが同一であるか否かを判定する。
【0039】
車間距離判定部110bは、判定の結果、ナンバープレートが同一である場合には、車体の種別や車体の色などの前方車両データを画像処理部110aから取得する。そして、車間距離判定部110bは、前方車両データと、時刻情報取得部107から出力される位置情報および時刻情報とを関連付けて、車間距離判定結果として車間距離判定結果記憶部108aに記録する。
【0040】
一方、車間距離判定部110bは、判定の結果、ナンバープレートが同一ではない場合には、前方に車両の割り込みがあったことを示す「割り込みフラグ」を生成する。次に、車間距離判定部110bは、車体の種別や車体の色などの前方車両データを画像処理部110aから取得する。そして、車間距離判定部110bは、割り込みフラグと、前方車両データと、時刻情報取得部107から出力される位置情報および時刻情報とを関連付けて、車間距離判定結果として車間距離判定結果記憶部108aに記録する。
【0041】
車間距離判定結果の記録後、車間距離判定部110bは、適正な車間距離が取れていない旨の警告を運転者に通知する。例えば、車間距離判定部110bは、適正な車間距離が取れていない旨を示す警告情報を表示部104に表示出力させるとともに、適正な車間距離が取れていない旨の音声ガイダンスを音声出力部105に出力させる。そして、車間距離判定部110bは、画像処理部110aによって次の前方車両の画像が入力されるのを待機する。
【0042】
上述してきた車両間隔管理部110は、マイコンやマイクロコントローラなど、集積回路を用いたコンピュータである。集積回路としては、例えば、ASIC(Application Specific Integrated Circuit)やFPGA(Field Programmable Gate Array)などがある。
【0043】
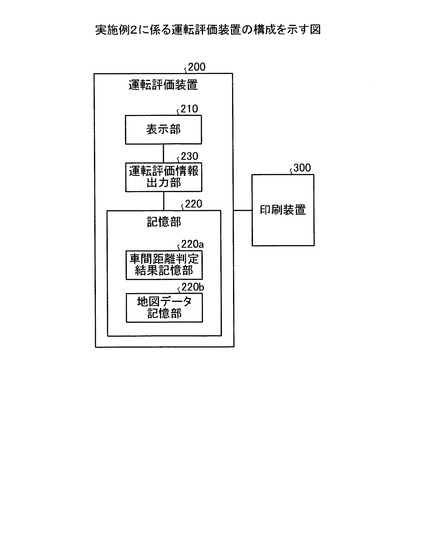
図5は、実施例2に係る運転評価装置の構成を示す図である。運転評価装置200を操作する運転評価者は、例えば、記憶媒体を車両100の外部記憶書込部109に接続し、車間距離判定結果記憶部108aに記憶されている車間距離判定結果のデータを記憶媒体に保存し、記憶媒体に保存された車間距離判定結果のデータを運転評価装置200の内部に保存する。そして、運転評価装置200のユーザは、車間距離判定結果のデータを元に運転評価装置200により生成された運転評価情報を取得する。
【0044】
運転評価装置200は、図5に示すように、表示部210と、記憶部220と、運転評価情報出力部230とを有する。また、運転評価装置220は、例えば、プリンタなどの印刷装置300とデータのやり取りが可能な状態に接続される。印刷装置300は、運転評価装置200から出力される運転評価情報を紙媒体に印字出力する。
【0045】
表示部210は、運転評価情報を表示出力することにより運転評価者に提供する。記憶部220は、車間距離判定結果記憶部220aおよび地図データ記憶部220bを有する。車間距離判定結果記憶部220aは、車間距離判定結果記憶部108aに記憶されている車間距離判定結果のデータと同一のデータを記憶する。地図データ記憶部220bは、地図データを記憶する。
【0046】
運転評価情報出力部230は、例えば、運転評価者から運転評価情報の出力指示操作を受け付けると、車間距離判定結果記憶部220aから車間距離判定結果のデータを読み込むとともに、地図データ記憶部220bから地図データを読み込む。次に、運転評価情報出力部230は、車間距離判定結果のデータに含まれる位置情報に基づいて、車間距離判定結果のデータに含まれる他のデータを地図データ上に展開することにより運転評価情報を生成する。そして、運転評価情報出力部230は、生成した運転評価情報を表示部210に表示出力させるとともに、印刷装置300に送信する。
【0047】
なお、運転評価装置200は、記憶媒体を介して、車間距離判定結果のデータをやり取りする場合を上述したが、これに限られるものではない。例えば、運転評価装置200と、車両100に搭載された車両間隔管理部110と通信可能な状態に接続することにより、車間距離判定結果記憶部108aに記憶されている車間距離判定結果のデータを運転評価装置200に取り込むようにしてもよい。
【0048】
[車両間隔管理部による処理(実施例2)]
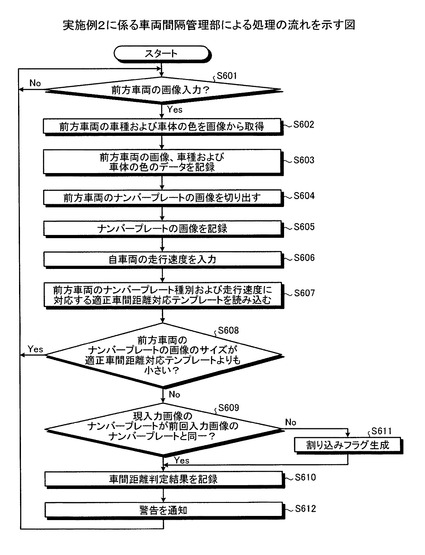
図6は、実施例2に係る車両間隔管理部による処理の流れを示す図である。図6に示すように、画像処理部110aは、画像取得部101から前方車両の画像が入力されると(ステップS601,YES)、既存技術を用いて画像処理を行い、画像内に映し出された前方車両の車種および車体の色のデータを取得する(ステップS602)。そして、画像処理部110aは、前方車両の車種や車体の色のデータを内部的な記憶部に記録する(ステップS603)。
【0049】
ここで、ステップS601の説明に戻る。画像処理部110aは、画像取得部101から前方車両の画像が入力されるまで、ステップS601の判定結果を「NO」とする。
【0050】
次に、画像処理部110aは、既存技術を用いて、画像取得部101から入力した前方車両の画像からナンバープレートの画像を切り出す(ステップS604)。そして、画像処理部110aは、前方車両のナンバープレートの画像を内部的な記憶部に記録する(ステップS605)。
【0051】
続いて、車間距離判定部110bは、車速センサー102から自車両の走行速度を入力する(ステップS606)。次に、車間距離判定部110bは、前方車両のナンバープレートの種別および自車両の走行速度に対応する適正車間距離対応テンプレートをテンプレート記憶部108bから読み込む(ステップS607)。そして、車間距離判定部110bは、画像処理部110aから前方車両のナンバープレートの画像のサイズが、テンプレート記憶部108bから読み込んだ適正車間距離対応テンプレートよりも小さいか否かを判定する(ステップS608)。
【0052】
車間距離判定部110bは、判定の結果、前方車両のナンバープレートの画像のサイズが、適正車間距離対応テンプレートよりも小さい場合には(ステップS608,YES)、上述したステップS601に戻る。
【0053】
一方、車間距離判定部110bは、判定の結果、前方車両のナンバープレートの画像のサイズが、適正車間距離対応テンプレートよりも小さくない場合には(ステップS608,NO)、次の判定を実行する。すなわち、車間距離判定部110bは、現入力画像のナンバープレートと、前回入力画像のナンバープレートとが同一であるか否かを判定する(ステップS609)。
【0054】
車間距離判定部110bは、判定の結果、ナンバープレートが同一である場合には(ステップS609,YES)、前方車両データ、位置情報および時刻情報を関連付けて、車間距離判定結果として車間距離判定結果記憶部108aに記録する(ステップS610)。
【0055】
一方、車間距離判定部110bは、判定の結果、ナンバープレートが同一ではない場合には(ステップS609,NO)、前方に車両の割り込みがあったことを示す「割り込みフラグ」を生成する(ステップS611)。そして、車間距離判定部110bは、上述したステップS610に移行し、割り込みフラグ、前方車両データ、位置情報および時刻情報を関連付けて、車間距離判定結果として車間距離判定結果記憶部108aに記録する。
【0056】
車間距離判定結果の記録後、車間距離判定部110bは、適正な車間距離が取れていない旨の警告を運転者に通知する(ステップS612)。そして、車間距離判定部110bは、上述したステップS601に戻る。
【0057】
[実施例2による効果]
上述してきたように、実施例2では、自車両の速度に応じて前方車両との間に確保する必要がある所定の車間距離をとった場合に、自車両から撮影される前方車両のナンバープレートにサイズに対応するテンプレートを走行速度ごとに記憶しておく。また、実施例2では、前方車両のナンバープレートの画像を取得すると、前方車両のナンバープレートの画像と、適正車間距離対応テンプレートのサイズと比較することにより、車間距離の適否を判定する。そして、実施例2では、車間距離が不適当であった場合に、そのときの自車両の位置や時刻などを記録する。このようなことから、実施例2によれば、車間距離に対する運転評価を行うための情報を保存できる。
【0058】
また、実施例2では、自車両の位置および時刻を地図上に展開したデータを運転評価者に提供する。このようなことから、運転評価者は、このデータに基づいて、車間距離に対する運転評価を行うことができる。
【0059】
なお、上述した実施例2において、画像取得部101により取得された前方車両のナンバープレートの画像から、前方車両との間の車間距離を算出し、算出した車間距離を車間距離判定結果として記録するようにしてもよい。
【0060】
また、上述した実施例2では、前方車両のナンバープレートの画像と、適正車間距離対応テンプレートのサイズとの比較により車間距離の適否を判定したが、これに限定されるものではない。例えば、走行速度に応じた適正な車間距離自体を予め保存しておく。そして、前方車両のナンバープレートの画像に基づいて、前方車両との車間距離を実際に算出し、算出した車間距離と適正な車間距離と比較することで、車間距離の適否を判定するようにしてもよい。
【実施例3】
【0061】
上述した実施例2において、例えば、前方車両と自車両との間の相対速度に応じた適正な車間距離を判定するようにしてもよい。
【0062】
[車両の構成(実施例3)]
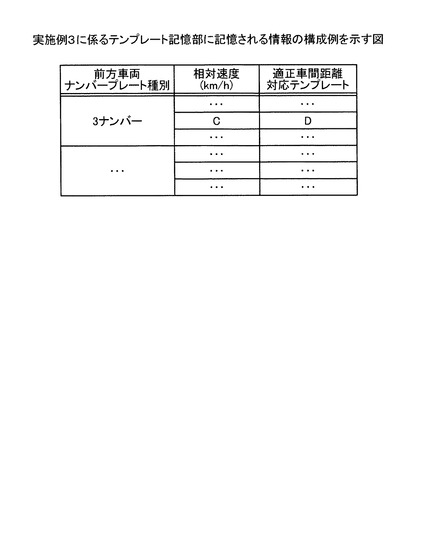
図7は、実施例3に係るテンプレート記憶部に記憶される情報の構成例を示す図である。図7に示すように、テンプレート記憶部108bは、「前方車両ナンバープレート種別」と、「相対速度」と、「適正車間距離対応テンプレート」とを対応付けて記憶する。例えば、テンプレート記憶部108bは、「前方車両ナンバープレート種別」である「3ナンバー」と、相対速度である「C(km/h)」と、適正車間距離対応テンプレートである「D」とを対応付けて記憶する。
【0063】
車間距離判定部110bは、車速センサー102から自車両の走行速度を入力する。次に、車間距離判定部110bは、画像処理部110aから前方車両のナンバープレートの画像を取り込む。そして、車間距離判定部110bは、自車両の走行速度と、前方車両のナンバープレートの画像のサイズの変化とに基づいて、前方車両と自車両との間の相対速度を算出する。
【0064】
例えば、車間距離判定部110bは、自車両の走行速度を一定に保った状態で、ある所定時間における前方車両のナンバープレートの画像のサイズの変化を取得する。次に、車間距離判定部110bは、ある所定時間における車間距離の変化量を算出し、自車両の走行速度と車間距離の変化量とに基づいて、前方車両の走行速度を算出する。そして、車間距離判定部110bは、例えば、自車両に対する前方車両の相対速度、つまり自車両から見た前方車両の相対速度を算出する。
【0065】
相対速度の算出後、車間距離判定部110bは、ナンバープレートの種別および自車両と前方車両との間の相対速度に対応する適正車間距離対応テンプレートをテンプレート記憶部108bから読み込む。そして、車間距離判定部110bは、画像処理部110aから前方車両のナンバープレートの画像のサイズが、テンプレート記憶部108bから読み込んだ適正車間距離対応テンプレートよりも小さいか否かを判定する。
【0066】
[車両間隔管理部による処理(実施例3)]
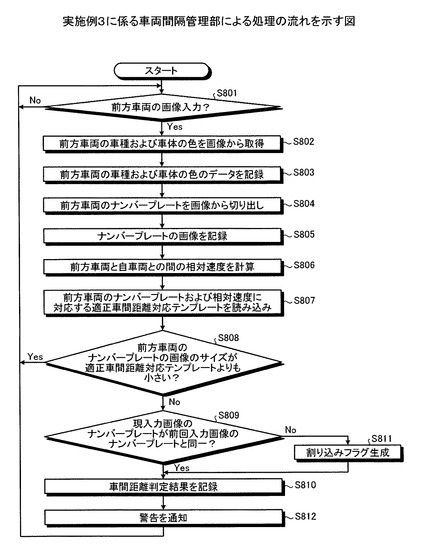
図8は、実施例3に係る車両間隔管理部による処理の流れを示す図である。なお、実施例3に係る車両間隔管理部による処理は、図8に示すステップS806およびステップS807の処理が、上述した実施例2とは異なる。
【0067】
すなわち、図8に示すように、画像処理部110aにより、前方車両のナンバープレートの画像が記録されると、車間距離判定部110bは、前方車両と自車両との間の相対速度を算出する(ステップS806)。そして、車間距離判定部110bは、ナンバープレートの種別および自車両と前方車両との間の相対速度に対応する適正車間距離対応テンプレートをテンプレート記憶部108bから読み込む(ステップS807)。
【0068】
[実施例3による効果]
実施例3によれば、自車両と前方車両との間の相対速度を用いた場合も、上述した実施例2と同様に、車間距離に対する運転評価を行うことができる。
【0069】
なお、相対速度の代わりに、自車両の加速度に対応する適正車間距離対応テンプレートや、自車両と前方車両との間の相対加速度に対応する適正車間距離対応テンプレートを用いてもよい。
【実施例4】
【0070】
上述した実施例2において、自車両の運転者の特性や自車両の特性、前方車両の運転者の特性などに応じて、適正車間距離対応テンプレートのサイズを補正するようにしてもよい。
【0071】
[車両の構成(実施例4)]
図9は、実施例4に係る車両の構成を示す図である。図9に示すように、記憶部108は、パラメータ記憶部108cを有する。パラメータ記憶部108cは、運転者の特性や自車両の特性、前方車両の運転者の特性などに応じて、適正車間距離対応テンプレートのサイズを補正するためのパラメータを記憶する。なお、テンプレート記憶部108bには、上述した各種特性を考慮せず、平均サイズの車両について、走行速度に応じた確保すべき車間距離に対応するサイズのテンプレートを記憶しているものとする。
【0072】
ここで、自車両の運転者の特性とは、例えば、運転者の年齢や運転暦などである。また、自車両の特性とは、例えば、自車両の乗車人数または荷重などである。また、前方車両の運転者の特性とは、公安委員会により車両への設置が義務付けられている所定のマークにより識別可能な運転者の運転能力である。いわゆる「わかばマーク」が前方車両に設置されている場合には、運転者が初心者であるために運転能力が未熟であるものと判断する。また、いわゆる「もみじマーク」が前方車両に設置されている場合には、運転者が高齢者であるために運転能力が低下しているものと判断する。
【0073】
パラメータ記憶部108cは、例えば、運転者の年齢が反射神経の衰え始める範囲にある場合には、制動距離が長くなってしまう恐れがある。よって、パラメータ記憶部108cは、年齢が高いほど車間距離がより長く確保されていることを確認できるように、適正車間距離対応テンプレートのサイズを小さく補正するための所定のパラメータを年齢ごとに記憶する。
【0074】
また、パラメータ記憶部108cは、例えば、運転者の運転暦が運転技術の熟練していないと考えられる年数である場合には、制動距離が長くなってしまう恐れがある。よって、パラメータ記憶部108cは、運転暦が浅いほど車間距離がより長く確保されていることを確認できるように、適正車間距離対応テンプレートのサイズを小さく補正するための所定のパラメータを運転暦ごとに記憶する。
【0075】
また、パラメータ記憶部108cは、自車両の乗車人数が多い場合、または自車両の荷量が重い場合には、制動距離が長くなってしまう恐れがある。よって、パラメータ記憶部108cは、乗車人数が多いほど、または自車両の荷量が重いほど、車間距離がより長く確保されていることを確認できるように、適正車間距離対応テンプレートのサイズを小さく補正するための所定のパラメータを乗車人数または自車両の荷重ごとに記憶する。
【0076】
また、パラメータ記憶部108cは、前方の車両の運転者が初心者あるいは高齢者である場合には、前方車両により危険な状況に陥る恐れがある。よって、パラメータ記憶部108cは、前方の車両の運転者が初心者あるいは高齢者である場合に、車間距離がより長く確保されていることを確認できるように、適正車間距離対応テンプレートのサイズを小さく補正するための所定のパラメータを記憶する。
【0077】
入力部103は、運転開始前に、上述した運転者の年齢や運転暦などの特性、乗車人数、荷重などの自車両の特性の入力を運転者から受け付ける。
【0078】
画像処理部110aは、画像取得部101により入力された前方車両の画像から、前方車両の運転者の特性を判断するための所定のマークを検出した場合には、前方車両の車種および車体の色とともに、運転者の特性を記録する。
【0079】
車間距離判定部110bは、ナンバープレートの種別および自車両の走行速度に対応する適正車間距離対応テンプレートをテンプレート記憶部108bから読み込む。さらに、車間距離判定部110bは、自車両の特性、運転者の特性および前方車両の運転者の特性に応じたパラメータをパラメータ記憶部108cから読み込む。そして、車間距離判定部110bは、読み込んだパラメータを用いて、適正車間距離対応テンプレートのサイズを補正する。
【0080】
[車両間隔管理部による処理(実施例4)]
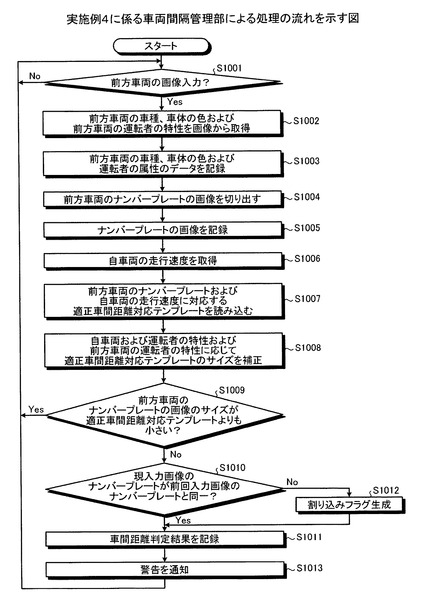
図10は、実施例4に係る車両間隔管理部による処理の流れを示す図である。図10に示す処理は、上述した運転者の年齢や運転暦などの特性、乗車人数などの自車両の特性の入力を予め運転者から受け付けている前提で開始されるものとする。なお、実施例4に係る車両間隔管理部による処理は、図10に示すステップS1002、ステップS1003およびステップS1008の処理が、上述した実施例2とは異なる。
【0081】
すなわち、図10に示すように、画像処理部110aは、画像内に映し出された前方車両の車種、車体の色のデータおよび前方車両の運転者の特性を取得する(ステップS1002)。そして、画像処理部110aは、前方車両の車種、車体の色および運転者の特性に関するデータを内部的な記憶部に記録する(ステップS1003)。車間距離判定部110bは、自車両の特性、運転者の特性および前方車両の運転者の特性に応じたパラメータにより、適正車間距離対応テンプレートのサイズを補正する(ステップS1008)。
【0082】
[実施例4による効果]
実施例4によれば、運転者の年齢や運転暦などの特性、乗車人数または荷重などの自車両の特性、初心者や高齢者などの前方車両の運転者の特性を加味した車間距離に対する運転評価を行うことができる。
【実施例5】
【0083】
以下、本願の開示する車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラムの他の実施形態を説明する。
【0084】
(1)装置構成等
例えば、図2に示した車両間隔管理部110の構成は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。例えば、図2に示す車両間隔管理部110の画像処理部110aと、車間距離判定部110bとを機能的または物理的に統合してもよい。このように、車両間隔管理部110の全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。
【0085】
(2)車両間隔管理方法
上述してきた実施例により、以下に説明するような車両間隔管理方法が実現される。この車両間隔管理方法は上述した車両間隔管理部110に適用される。この車両間隔管理方法は、選択ステップと、取得ステップと、判断ステップとを含む。
【0086】
上述した選択ステップは、車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部から該データテーブルを読み込み、該読み込んだテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する。
【0087】
上述した取得ステップは、運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する。
【0088】
上述した判断ステップは、上述した選択ステップにより選択されたテンプレートと、上述した取得ステップにより取得されたナンバープレートの画像とに基づき、運転中の車両と、運転中の車両の前方を走行中の車両との車間距離の適否を判断する。
【0089】
(3)車両間隔管理プログラム
また、例えば、上述の実施例にて説明した車両間隔管理部110により実行される各種の処理は、あらかじめ用意されたプログラムをパーソナルコンピュータやワークステーションなどのコンピュータシステムで実行することによって実現することもできる。なお、車両間隔管理部110の各種の処理については、例えば、図6、9、10等を参照されたい。
【0090】
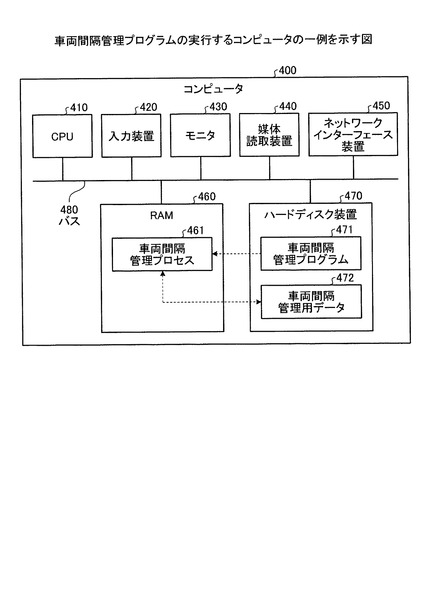
そこで、以下では、図11を用いて、上述の実施例にて説明した車両間隔管理部110により実行される処理と同様の機能を実現する車両間隔管理プログラムを実行するコンピュータの一例を説明する。図11は、車両間隔管理プログラムを実行するコンピュータの一例を示す図である。
【0091】
図11に示すように、車両間隔管理部110として機能するコンピュータ400は、各種演算処理を実行するCPU(Central Processing Unit)410と、ユーザからのデータの入力を受け付ける入力装置420と、モニタ430を有する。
【0092】
また、コンピュータ400は、図11に示すように、記憶媒体からプログラム等を読取る媒体読取装置440と、ネットワークを介して他のコンピュータとの間でデータの授受を行うネットワークインターフェース装置450を有する。また、コンピュータ400は、図11に示すように、各種情報を一時記憶するRAM(Random Access Memory)460と、ハードディスク装置470とを有する。そして、各装置410〜470は、バス480に接続される。
【0093】
なお、CPU410の代わりに、例えば、MPU(Micro Processing Unit)などの電子回路、ASIC(Application Specific Integrated Circuit)やFPGA(Field Programmable Gate Array)などの集積回路を用いることもできる。また、RAM460の代わりに、フラッシュメモリ(flash memory)などの半導体メモリ素子を用いることもできる。
【0094】
ハードディスク装置470には、上述した車両間隔管理部110の機能と同様の機能を発揮する車両間隔管理プログラム471および車両間隔管理用データ472が記憶されている。なお、この車両間隔管理プログラム471を適宜分散させて、ネットワークを介して通信可能に接続された他のコンピュータの記憶部に記憶させておくこともできる。
【0095】
そして、CPU410が、車両間隔管理プログラム471をハードディスク装置470から読み出してRAM460に展開することにより、図11に示すように、車両間隔管理プログラム471は車両間隔管理プロセス461として機能する。車両間隔管理プロセス461は、ハードディスク装置470から読み出した車両間隔管理用データ472等を適宜RAM460上の自身に割当てられた領域に展開し、この展開した各種データに基づいて各種処理を実行する。
【0096】
なお、車両間隔管理プロセス461は、例えば、図2に示した車両間隔管理部110の画像処理部110aおよび車間距離判定部110bにて実行される処理を含む。なお、車両間隔管理部110の処理機能部にて実行される処理は、例えば、上述の実施例にて説明した図6、9、10等に示す処理に対応する。
【0097】
なお、車両間隔管理プログラム471については、必ずしも最初からハードディスク装置470に記憶させておく必要はない。例えば、コンピュータ400に挿入されるフレキシブルディスク(FD)、CD−ROM、DVDディスク、光磁気ディスク、ICカードなどの「可搬用の物理媒体」に各プログラムを記憶させておく。そして、コンピュータ400がこれらから各プログラムを読み出して実行するようにしてもよい。
【0098】
さらには、公衆回線、インターネット、LAN、WANなどを介してコンピュータ400に接続される「他のコンピュータ(またはサーバ)」などに各プログラムを記憶させておく。そして、コンピュータ400がこれらから各プログラムを読み出して実行するようにしてもよい。
【0099】
以上の実施例を含む実施形態に関し、さらに以下の付記を開示する。
【0100】
(付記1)車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部と、
前記記憶部に記憶されたデータテーブルに基づき、前記運転中の車両の速度に対応したサイズのテンプレートを選択する選択部と、
運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得部と、
前記選択部により選択されたテンプレートと、前記取得部により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断部と
を有することを特徴とする車両間隔管理装置。
【0101】
(付記2)前記運転中の車両の位置情報を取得する位置情報取得部と、
前記位置情報取得部により位置情報が取得された時刻を取得する時刻情報取得部と、
前記取得部により取得されたナンバープレートの画像から、前記前方を走行中の車両との車間距離を計算する計算部と、
前記判断部により前記車間距離が適当ではないと判断された場合に、前記取得部により取得された画像と、前記情報取得部により取得された前記情報と、前記計算部により計算された前記車間距離とを対応付けて記憶部に記録する記録部と
をさらに有することを特徴とする付記1に記載の車両間隔管理装置。
【0102】
(付記3)前記判断部により前記車間距離が適当ではないと判断された場合に、前記運転中の車両の運転者に警告を通知する警告通知部をさらに有することを特徴とする付記1または2に記載の車両間隔管理装置。
【0103】
(付記4)前記運転中の車両の速度と、前記取得部により取得されたナンバープレートの画像とに基づいて、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との間の相対速度を計算する相対速度計算部をさらに有し、
前記選択部は、前記相対速度計算部により計算された前記相対速度に対応したテンプレートを選択することを特徴とする付記1または2に記載の車両間隔管理装置。
【0104】
(付記5)車両の運転者の属性あるいは車両の属性に応じて前記テンプレートのサイズを修正するためのパラメータを記憶するパラメータ記憶部と、
前記運転中の車両の属性、該車両の運転者の属性および該車両の前方を走行中の車両の運転者の属性に対応する前記パラメータを前記パラメータ記憶部から読み込み、該読み込まれたパラメータを用いて、前記選択部により選択されたテンプレートのサイズを補正する補正部と
をさらに有し、
前記判断部は、前記補正部によりサイズの補正がなされたテンプレートと、前記取得部により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離の適否を判断することを特徴とする付記1または2に記載の車両間隔管理装置。
【0105】
(付記6)前記車両間隔管理装置に適用される車両間隔管理方法であって、
車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部から該データテーブルを読み込み、該読み込んだテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する選択ステップと、
前記運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得ステップと、
前記選択ステップにより選択されたテンプレートと、前記取得ステップにより取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断ステップと
を含むことを特徴とする車両間隔管理方法。
【0106】
(付記7)前記運転中の車両の位置情報を取得する位置情報取得ステップと、
前記位置情報取得ステップにより位置情報が取得された時刻を取得する時刻取得ステップと、
前記取得ステップにより取得されたナンバープレートの画像から、前記前方を走行中の車両との車間距離を計算する計算ステップと、
前記判断ステップにより前記車間距離が適当ではないと判断された場合に、前記取得ステップにより取得された画像と、前記位置情報取得ステップにより取得された位置情報と、前記時刻取得ステップにより取得された時刻と、前記計算ステップにより計算された前記車間距離とを対応付けて記憶部に記録する記録ステップと
をさらに含んだことを特徴とする付記6に記載の車両間隔管理方法。
【0107】
(付記8)前記判断ステップにより前記車間距離が適当ではないと判断された場合に、前記運転中の車両の運転者に警告を通知する警告通知ステップをさらに含んだことを特徴とする付記6または7に記載の車両間隔管理方法。
【0108】
(付記9)前記車両間隔管理装置として機能するコンピュータに実行させる車両間隔管理プログラムであって、
前記コンピュータに、
車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部から該データテーブルを読み込み、該読み込んだテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する選択手順と、
前記運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得手順と、
前記選択手順により選択されたテンプレートと、前記取得手順により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断手順と
を実行させることを特徴とする車両間隔管理プログラム。
【0109】
(付記10)前記コンピュータに、
前記運転中の車両の位置情報を取得する位置情報取得手順と、
前記位置情報取得手順により位置情報が取得された時刻を取得する時刻取得手順と、
前記取得手順により取得されたナンバープレートの画像から、前記前方を走行中の車両との車間距離を計算する計算手順と、
前記判断手順により前記車間距離が適当ではないと判断された場合に、前記取得手順により取得された画像と、前記位置情報取得手順により取得された位置情報と、前記時刻取得手順により取得された時刻と、前記計算手順により計算された前記車間距離とを対応付けて記憶部に記録する記録手順と
をさらに実行させることを特徴とする付記9に記載の車両間隔管理プログラム。
【0110】
(付記11)前記コンピュータに、
前記判断手順により前記車間距離が適当ではないと判断された場合に、前記運転中の車両の運転者に警告を通知する警告通知手順をさらに実行させることを特徴とする付記9または10に記載の車両間隔管理プログラム。
【符号の説明】
【0111】
10 車両間隔管理装置
11 記憶部
12 選択部
13 取得部
14 判断部
100 車両
101 画像取得部
102 車速センサー
103 入力部
104 表示部
105 音声出力部
106 位置情報取得部
107 時刻情報取得部
108 記憶部
109 外部記憶書込部
110 車両間隔管理部
110a 画像処理部
110b 車間距離判定部
200 運転評価装置
210 表示部
220 記憶部
230 運転評価情報出力部
300 印刷装置
400 コンピュータ
410 CPU
420 入力装置
430 モニタ
440 媒体読取装置
450 ネットワークインターフェース装置
460 RAM
461 車両間隔管理プロセス
470 ハードディスク装置
471 車両間隔管理プログラム
472 車両間隔管理用データ
【技術分野】
【0001】
この発明は、車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラムに関する。
【背景技術】
【0002】
近年、道路交通法の改正による罰則の強化や燃料費の高騰に伴って、安全運転や経済運転を心がけようとする運転者の数が増加傾向にある。安全運転や経済運転を心がける運転者にとって、前方車両との間に適正な車間距離を保つことは有効な運転テクニックの一つである。
【0003】
このため、安全運転等を支援することを目的として、車間距離を計測する従来技術については色々と提案されている。一例を挙げれば、車両に搭載されたレーザレーダヘッドからレーザ光を測距対象物に照射し、測距対象物からの反射レーザ光を受光するまでの時間を計測することにより車間距離を計測する技術が提案されている。
【0004】
なお、例えば、運転評価に利用することを目的として、運転状況を記録の仕方を車間距離に応じて変更する従来技術も提案されている。例えば、任意の方法により車間距離を計測し、計測した車間距離に基づいて運転者が危険な挙動をとったもの判定できる場合には、ドライブレコーダの記録モードを変更する技術がある。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−203599号公報
【特許文献2】特開2002−42288号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上述したように、安全運転や経済運転にとって車間距離の確保は重要であるので、車両走行中の車間距離を記録し、車間距離が適正であったか否かを評価する技術の実現が求められている。
【0007】
しかしながら、上述した従来技術を用いても、車間距離が適正であったか否かを評価する技術の実現は難しいというのが現状である。例えば、レーザレーダヘッドを用いて車間距離を計測する技術では、曲がり角では前方車両を検知することできなかったり、道幅が狭い道路では対向車を前方車両として誤検知してしまったりする等の問題がある。このため、いかなる状況においても車間距離を記録できるとは限らないので、車間距離に対する運転評価を行う技術の実現が難しい。
【0008】
開示の技術は、上記に鑑みてなされたものであって、車間距離に対する運転評価を実現することが可能な車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラムを提供することを目的とする。
【課題を解決するための手段】
【0009】
本願の開示する車両間隔管理装置は、一つの態様において、記憶部と、選択部と、取得部と、判断部とを有する。記憶部は、車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する。選択部は、記憶部に記憶されたデータテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する。取得部は、運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する。判断部は、選択部により選択されたテンプレートと、取得部により取得されたナンバープレートの画像とに基づき、運転中の車両と、運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断部とを有する。
【発明の効果】
【0010】
本願の開示する技術の一つの態様によれば、車間距離に対する運転評価を実現できる。
【図面の簡単な説明】
【0011】
【図1】図1は、実施例1に係る車両間隔管理装置を示す図である。
【図2】図2は、実施例2に係る車両の構成を示す図である。
【図3】図3は、実施例2に係る車間距離判定結果記憶部に記憶される情報の構成例を示す図である。
【図4】図4は、実施例2に係るテンプレート記憶部に記憶される情報の構成例を示す図である。
【図5】図5は、実施例2に係る運転評価装置の構成を示す図である。
【図6】図6は、実施例2に係る車両間隔管理部による処理の流れを示す図である。
【図7】図7は、実施例3に係るテンプレート記憶部に記憶される情報の構成例を示す図である。
【図8】図8は、実施例3に係る車両間隔管理部による処理の流れを示す図である。
【図9】図9は、実施例4に係る車両の構成を示す図である。
【図10】図10は、実施例4に係る車両間隔管理部による処理の流れを示す図である。
【図11】図11は、車両間隔管理プログラムの実行するコンピュータの一例を示す図である。
【発明を実施するための形態】
【0012】
以下に、図面を参照しつつ、本願の開示する車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラムの一実施形態について詳細に説明する。なお、以下では、本願の開示する車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラムの一実施形態として後述する実施例により、本願が開示する技術が限定されるものではない。
【実施例1】
【0013】
図1は、実施例1に係る車両間隔管理装置を示す図である。図1に示すように、車両間隔管理装置10は、記憶部11と、選択部12と、取得部13と、判断部14とを有する。
【0014】
記憶部11は、車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する。選択部12は、記憶部11に記憶されたデータテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する。取得部13は、運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する。判断部14は、選択部11により選択されたテンプレートと、取得部13により取得されたナンバープレートの画像とに基づき、運転中の車両と、運転中の車両の前方を走行中の車両との車間距離に関する判断をする。
【0015】
車両間隔管理装置10は、例えば、自車両の速度に応じて前方車両との間に確保する必要がある所定の車間距離をとった場合に、自車両のカメラにより撮影される前方車両のナンバープレートを表すテンプレートを自車両の速度ごとに記憶しておく。そして、車両間隔管理装置10は、前方車両のナンバープレートの画像を取得すると、この画像内のナンバープレートのサイズと、自車両の速度に対応するテンプレートのサイズと比較することにより、例えば、車間距離の適否を判断する。
【0016】
このようなことから、実施例1に係る車両間隔管理装置10は、車間距離に対する運転評価を実現できる。
【実施例2】
【0017】
[車両の構成(実施例2)]
図2は、実施例2に係る車両の構成を示す図である。なお、以下では、本願の開示する車両間隔管理装置に対応する各処理機能部を車両に適用した場合の一実施形態について説明する。
【0018】
図2に示すように、車両100には、画像取得部101、車速センサー102、入力部103、表示部104、音声出力部105、位置情報取得部106および時刻情報取得部107が搭載される。さらに、車両100には、記憶部108、外部記憶書込部109および車両間隔管理部110が搭載される。
【0019】
画像取得部101は、所定のタイミングで、運転中の自車両の前方を走行中の車両を撮影し、この車両の画像を取得する。以下、運転中の自車両の前方を走行中の車両を「前方車両」と表記する。なお、画像取得部101は、例えば、レンズを有し、レンズから入ってくる画像を写真や動画などの形式で撮影するカメラなどの光学機器に該当する。
【0020】
車速センサー102は、運転中の自車両の走行速度を取得する。なお、運転中の自車両の走行速度は、GPSから取得してもよい。入力部103は、運転者から各種の入力を受け付ける。例えば、入力部103は、運転開始前の運転者から、適正な車間距離を取れていない場合の警告の通知を行う設定の入力を受け付ける。
【0021】
表示部104は、例えば、適正な車間距離が取れていない旨の運転者に通知する警告画面情報など、各種情報を表示出力することにより運転者に提供する。なお、表示部104は、例えば、ディスプレイやモニタであり、タッチパネル機能などを有してもよい。音声出力部105は、例えば、適正な車間距離が取れていない旨の運転者に通知する警告音声など、各種音声を出力することにより運転者に提供する。なお、音声出力部105は、例えば、フロントスピーカやリアスピーカなどである。
【0022】
位置情報取得部106は、例えば、GPS受信機に相当し、GPS人工衛星との通信によって自車両の位置を算出する。位置情報取得部106は、例えば、後述する画像処理装置110aにより前方車両の画像が入力されたタイミングで自車両の位置を算出し、算出した自車両の位置に関する情報を時刻情報取得部107に出力する。なお、位置情報取得部106は、図には示していないナビゲーションシステムに自車両の位置情報を提供することにより、自車両の走行予定経路をナビゲーションシステムに管理させることもできる。
【0023】
時刻情報取得部107は、位置情報取得部106により自車両の位置が算出された時刻の情報を時刻情報提供サービスなどから取得する。時刻情報取得部107は、取得した時刻情報と、位置情報取得部106から取得する自車両の位置に関する情報とを関連付けて車両間隔管理部110に出力する。
【0024】
記憶部108は、車間距離判定結果記憶部108aおよびテンプレート記憶部108bを有する。なお、記憶部108は、例えば、RAM(Random Access Memory)やフラッシュメモリ(flash memory)などの半導体メモリ素子である。
【0025】
図3は、実施例2に係る車間距離判定結果記憶部に記憶される情報の構成例を示す図である。図3に示す「前方車両データ」とは、画像取得部101により取得された前方車両の画像から取得する車種および車体の色などのデータである。図3に示す「位置情報」とは、位置情報取得部106により算出された自車両の位置に関する情報である。図3に示す「時刻情報」とは、時刻情報取得部107により取得された時刻情報である。図3に示す「割り込みフラグ」とは、前方に車両が割り込んだ場合に、車両間隔管理部110により生成されるフラグである。
【0026】
図3に示すように、車間距離判定結果記憶部108aは、車両間隔管理部110による車間距離判定結果に関する情報として、「前方車両データ」と、「位置情報」と、「時刻情報」と、「割り込みフラグ」とを対応付けて記憶する。
【0027】
図4は、実施例2に係るテンプレート記憶部に記憶される情報の構成例を示す図である。図4に示す「前方車両ナンバープレート種別」は、画像取得部101により取得された画像に映し出されている前方車両のナンバープレートの種別である。例えば、車両の大きさ、排気量あるいは定員等によって、予めサイズが規格化されているナンバープレートの種別であり、1,2,3,4,5,6,7,8,9,0のいずれかの数字から始まる。一般的に、3から始まるナンバープレートは「3ナンバー」と呼称される。
【0028】
図4に示す「自車速度」は、車速センサー102により取得された運転中の自車両の走行速度である。図4に示す「適正車間距離対応テンプレート」は、前方車両との間に自車両の走行速度に応じた適正な車間距離が確保されている状態で、画像取得部101により取得される画像に映し出された前方車両のナンバープレートのサイズを表すテンプレートである。
【0029】
図4に示すように、テンプレート記憶部108bは、「前方車両ナンバープレート種別」と、「自車速度」と、「適正車間距離対応テンプレート」とを対応付けて記憶する。例えば、テンプレート記憶部108bは、「前方車両ナンバープレート種別」である「3ナンバー」と、走行速度である「A(km/h)」と、適正車間距離対応テンプレートである「B」とを対応付けて記憶する。
【0030】
ここで、適正な車間距離および適正車間距離対応テンプレートについて説明する。適正な車間距離とは、前方車両の制動の影響を受けることなく運転をできる距離、つまり前方車両が急制動を行った場合に危険を回避できる距離を意味するものとし、例えば、自車両が現在の走行速度により2秒間で進む距離を目安とする。例えば、自車両の速度が時速50キロメートルである場合には約28メートル、自車両の速度が時速60キロメートルである場合には約33メートル、自車両の速度が時速80キロメートルである場合には約44メートルとする。
【0031】
そこで、縦165ミリメートル、横330ミリメートルの3ナンバーのナンバープレートを前方車両が有し、自車両の走行速度が時速60キロメートルである場合を例に挙げる。前方車両と自車両から33メートル離れた3ナンバーのナンバープレートを有する前方車両の画像を画像取得部101により取得した場合に、画像内に映し出される3ナンバープレートのサイズを適正車間距離対応テンプレートとする。このようにして、ナンバープレートの種別ごとに、自車両に想定される走行速度に応じた適正車間距離対応テンプレートをそれぞれ取得しておく。
【0032】
外部記憶書込部109は、車間距離判定結果に関するデータを記憶媒体に書き込み、書込み終了後、記憶媒体を外部に排出する。記憶媒体は、例えば、運転者の運転評価を行うユーザにより挿入される。
【0033】
車両間隔管理部110は、画像処理装置110aおよび車間距離判定部110bを有する。
【0034】
画像処理部110aは、画像取得部101により取得された前方車両の画像に関する処理を行う。例えば、画像処理部110aは、画像取得部101から前方車両の画像が入力されると、既存技術を用いて画像処理を行い、画像内に映し出された前方車両の車種および車体の色のデータを取得する。既存技術としては、例えば、パターンマッチング処理やエッジ抽出処理、カラー2値化処理などを適用する。そして、画像処理部110aは、前方車両の車種や車体の色のデータを内部的な記憶部に記録する。
【0035】
また、画像処理部110aは、既存技術を用いて、画像取得部101から入力した前方車両の画像からナンバープレートを切り出す。既存技術としては、例えば、パターンマッチング処理やエッジ抽出処理などを適用する。そして、画像処理部110aは、前方車両のナンバープレートのデータを内部的な記憶部に記録する。
【0036】
車間距離判定部110bは、前方車両との間に適正な車間距離が確保されているか否かを判定する。例えば、車間距離判定部110bは、車速センサー102から自車両の走行速度を入力する。次に、車間距離判定部110bは、画像処理部110aから前方車両のナンバープレートの画像を取り込み、ナンバープレートの種別および自車両の走行速度に対応する適正車間距離対応テンプレートをテンプレート記憶部108bから読み込む。そして、車間距離判定部110bは、画像処理部110aから前方車両のナンバープレートの画像のサイズが、テンプレート記憶部108bから読み込んだ適正車間距離対応テンプレートよりも小さいか否かを判定する。
【0037】
車間距離判定部110bは、判定の結果、前方車両のナンバープレートの画像のサイズが、適正車間距離対応テンプレートよりも小さい場合には、画像処理部110aによって次の前方車両の画像が入力されるのを待機する。
【0038】
一方、車間距離判定部110bは、判定の結果、前方車両のナンバープレートの画像のサイズが、適正車間距離対応テンプレートよりも小さくない場合には、前回入力画像から切り出されたナンバープレートの画像を画像処理部110aから読み込む。そして、車間距離判定部110bは、現入力画像のナンバープレートと、前回入力画像のナンバープレートが同一であるか否かを判定する。
【0039】
車間距離判定部110bは、判定の結果、ナンバープレートが同一である場合には、車体の種別や車体の色などの前方車両データを画像処理部110aから取得する。そして、車間距離判定部110bは、前方車両データと、時刻情報取得部107から出力される位置情報および時刻情報とを関連付けて、車間距離判定結果として車間距離判定結果記憶部108aに記録する。
【0040】
一方、車間距離判定部110bは、判定の結果、ナンバープレートが同一ではない場合には、前方に車両の割り込みがあったことを示す「割り込みフラグ」を生成する。次に、車間距離判定部110bは、車体の種別や車体の色などの前方車両データを画像処理部110aから取得する。そして、車間距離判定部110bは、割り込みフラグと、前方車両データと、時刻情報取得部107から出力される位置情報および時刻情報とを関連付けて、車間距離判定結果として車間距離判定結果記憶部108aに記録する。
【0041】
車間距離判定結果の記録後、車間距離判定部110bは、適正な車間距離が取れていない旨の警告を運転者に通知する。例えば、車間距離判定部110bは、適正な車間距離が取れていない旨を示す警告情報を表示部104に表示出力させるとともに、適正な車間距離が取れていない旨の音声ガイダンスを音声出力部105に出力させる。そして、車間距離判定部110bは、画像処理部110aによって次の前方車両の画像が入力されるのを待機する。
【0042】
上述してきた車両間隔管理部110は、マイコンやマイクロコントローラなど、集積回路を用いたコンピュータである。集積回路としては、例えば、ASIC(Application Specific Integrated Circuit)やFPGA(Field Programmable Gate Array)などがある。
【0043】
図5は、実施例2に係る運転評価装置の構成を示す図である。運転評価装置200を操作する運転評価者は、例えば、記憶媒体を車両100の外部記憶書込部109に接続し、車間距離判定結果記憶部108aに記憶されている車間距離判定結果のデータを記憶媒体に保存し、記憶媒体に保存された車間距離判定結果のデータを運転評価装置200の内部に保存する。そして、運転評価装置200のユーザは、車間距離判定結果のデータを元に運転評価装置200により生成された運転評価情報を取得する。
【0044】
運転評価装置200は、図5に示すように、表示部210と、記憶部220と、運転評価情報出力部230とを有する。また、運転評価装置220は、例えば、プリンタなどの印刷装置300とデータのやり取りが可能な状態に接続される。印刷装置300は、運転評価装置200から出力される運転評価情報を紙媒体に印字出力する。
【0045】
表示部210は、運転評価情報を表示出力することにより運転評価者に提供する。記憶部220は、車間距離判定結果記憶部220aおよび地図データ記憶部220bを有する。車間距離判定結果記憶部220aは、車間距離判定結果記憶部108aに記憶されている車間距離判定結果のデータと同一のデータを記憶する。地図データ記憶部220bは、地図データを記憶する。
【0046】
運転評価情報出力部230は、例えば、運転評価者から運転評価情報の出力指示操作を受け付けると、車間距離判定結果記憶部220aから車間距離判定結果のデータを読み込むとともに、地図データ記憶部220bから地図データを読み込む。次に、運転評価情報出力部230は、車間距離判定結果のデータに含まれる位置情報に基づいて、車間距離判定結果のデータに含まれる他のデータを地図データ上に展開することにより運転評価情報を生成する。そして、運転評価情報出力部230は、生成した運転評価情報を表示部210に表示出力させるとともに、印刷装置300に送信する。
【0047】
なお、運転評価装置200は、記憶媒体を介して、車間距離判定結果のデータをやり取りする場合を上述したが、これに限られるものではない。例えば、運転評価装置200と、車両100に搭載された車両間隔管理部110と通信可能な状態に接続することにより、車間距離判定結果記憶部108aに記憶されている車間距離判定結果のデータを運転評価装置200に取り込むようにしてもよい。
【0048】
[車両間隔管理部による処理(実施例2)]
図6は、実施例2に係る車両間隔管理部による処理の流れを示す図である。図6に示すように、画像処理部110aは、画像取得部101から前方車両の画像が入力されると(ステップS601,YES)、既存技術を用いて画像処理を行い、画像内に映し出された前方車両の車種および車体の色のデータを取得する(ステップS602)。そして、画像処理部110aは、前方車両の車種や車体の色のデータを内部的な記憶部に記録する(ステップS603)。
【0049】
ここで、ステップS601の説明に戻る。画像処理部110aは、画像取得部101から前方車両の画像が入力されるまで、ステップS601の判定結果を「NO」とする。
【0050】
次に、画像処理部110aは、既存技術を用いて、画像取得部101から入力した前方車両の画像からナンバープレートの画像を切り出す(ステップS604)。そして、画像処理部110aは、前方車両のナンバープレートの画像を内部的な記憶部に記録する(ステップS605)。
【0051】
続いて、車間距離判定部110bは、車速センサー102から自車両の走行速度を入力する(ステップS606)。次に、車間距離判定部110bは、前方車両のナンバープレートの種別および自車両の走行速度に対応する適正車間距離対応テンプレートをテンプレート記憶部108bから読み込む(ステップS607)。そして、車間距離判定部110bは、画像処理部110aから前方車両のナンバープレートの画像のサイズが、テンプレート記憶部108bから読み込んだ適正車間距離対応テンプレートよりも小さいか否かを判定する(ステップS608)。
【0052】
車間距離判定部110bは、判定の結果、前方車両のナンバープレートの画像のサイズが、適正車間距離対応テンプレートよりも小さい場合には(ステップS608,YES)、上述したステップS601に戻る。
【0053】
一方、車間距離判定部110bは、判定の結果、前方車両のナンバープレートの画像のサイズが、適正車間距離対応テンプレートよりも小さくない場合には(ステップS608,NO)、次の判定を実行する。すなわち、車間距離判定部110bは、現入力画像のナンバープレートと、前回入力画像のナンバープレートとが同一であるか否かを判定する(ステップS609)。
【0054】
車間距離判定部110bは、判定の結果、ナンバープレートが同一である場合には(ステップS609,YES)、前方車両データ、位置情報および時刻情報を関連付けて、車間距離判定結果として車間距離判定結果記憶部108aに記録する(ステップS610)。
【0055】
一方、車間距離判定部110bは、判定の結果、ナンバープレートが同一ではない場合には(ステップS609,NO)、前方に車両の割り込みがあったことを示す「割り込みフラグ」を生成する(ステップS611)。そして、車間距離判定部110bは、上述したステップS610に移行し、割り込みフラグ、前方車両データ、位置情報および時刻情報を関連付けて、車間距離判定結果として車間距離判定結果記憶部108aに記録する。
【0056】
車間距離判定結果の記録後、車間距離判定部110bは、適正な車間距離が取れていない旨の警告を運転者に通知する(ステップS612)。そして、車間距離判定部110bは、上述したステップS601に戻る。
【0057】
[実施例2による効果]
上述してきたように、実施例2では、自車両の速度に応じて前方車両との間に確保する必要がある所定の車間距離をとった場合に、自車両から撮影される前方車両のナンバープレートにサイズに対応するテンプレートを走行速度ごとに記憶しておく。また、実施例2では、前方車両のナンバープレートの画像を取得すると、前方車両のナンバープレートの画像と、適正車間距離対応テンプレートのサイズと比較することにより、車間距離の適否を判定する。そして、実施例2では、車間距離が不適当であった場合に、そのときの自車両の位置や時刻などを記録する。このようなことから、実施例2によれば、車間距離に対する運転評価を行うための情報を保存できる。
【0058】
また、実施例2では、自車両の位置および時刻を地図上に展開したデータを運転評価者に提供する。このようなことから、運転評価者は、このデータに基づいて、車間距離に対する運転評価を行うことができる。
【0059】
なお、上述した実施例2において、画像取得部101により取得された前方車両のナンバープレートの画像から、前方車両との間の車間距離を算出し、算出した車間距離を車間距離判定結果として記録するようにしてもよい。
【0060】
また、上述した実施例2では、前方車両のナンバープレートの画像と、適正車間距離対応テンプレートのサイズとの比較により車間距離の適否を判定したが、これに限定されるものではない。例えば、走行速度に応じた適正な車間距離自体を予め保存しておく。そして、前方車両のナンバープレートの画像に基づいて、前方車両との車間距離を実際に算出し、算出した車間距離と適正な車間距離と比較することで、車間距離の適否を判定するようにしてもよい。
【実施例3】
【0061】
上述した実施例2において、例えば、前方車両と自車両との間の相対速度に応じた適正な車間距離を判定するようにしてもよい。
【0062】
[車両の構成(実施例3)]
図7は、実施例3に係るテンプレート記憶部に記憶される情報の構成例を示す図である。図7に示すように、テンプレート記憶部108bは、「前方車両ナンバープレート種別」と、「相対速度」と、「適正車間距離対応テンプレート」とを対応付けて記憶する。例えば、テンプレート記憶部108bは、「前方車両ナンバープレート種別」である「3ナンバー」と、相対速度である「C(km/h)」と、適正車間距離対応テンプレートである「D」とを対応付けて記憶する。
【0063】
車間距離判定部110bは、車速センサー102から自車両の走行速度を入力する。次に、車間距離判定部110bは、画像処理部110aから前方車両のナンバープレートの画像を取り込む。そして、車間距離判定部110bは、自車両の走行速度と、前方車両のナンバープレートの画像のサイズの変化とに基づいて、前方車両と自車両との間の相対速度を算出する。
【0064】
例えば、車間距離判定部110bは、自車両の走行速度を一定に保った状態で、ある所定時間における前方車両のナンバープレートの画像のサイズの変化を取得する。次に、車間距離判定部110bは、ある所定時間における車間距離の変化量を算出し、自車両の走行速度と車間距離の変化量とに基づいて、前方車両の走行速度を算出する。そして、車間距離判定部110bは、例えば、自車両に対する前方車両の相対速度、つまり自車両から見た前方車両の相対速度を算出する。
【0065】
相対速度の算出後、車間距離判定部110bは、ナンバープレートの種別および自車両と前方車両との間の相対速度に対応する適正車間距離対応テンプレートをテンプレート記憶部108bから読み込む。そして、車間距離判定部110bは、画像処理部110aから前方車両のナンバープレートの画像のサイズが、テンプレート記憶部108bから読み込んだ適正車間距離対応テンプレートよりも小さいか否かを判定する。
【0066】
[車両間隔管理部による処理(実施例3)]
図8は、実施例3に係る車両間隔管理部による処理の流れを示す図である。なお、実施例3に係る車両間隔管理部による処理は、図8に示すステップS806およびステップS807の処理が、上述した実施例2とは異なる。
【0067】
すなわち、図8に示すように、画像処理部110aにより、前方車両のナンバープレートの画像が記録されると、車間距離判定部110bは、前方車両と自車両との間の相対速度を算出する(ステップS806)。そして、車間距離判定部110bは、ナンバープレートの種別および自車両と前方車両との間の相対速度に対応する適正車間距離対応テンプレートをテンプレート記憶部108bから読み込む(ステップS807)。
【0068】
[実施例3による効果]
実施例3によれば、自車両と前方車両との間の相対速度を用いた場合も、上述した実施例2と同様に、車間距離に対する運転評価を行うことができる。
【0069】
なお、相対速度の代わりに、自車両の加速度に対応する適正車間距離対応テンプレートや、自車両と前方車両との間の相対加速度に対応する適正車間距離対応テンプレートを用いてもよい。
【実施例4】
【0070】
上述した実施例2において、自車両の運転者の特性や自車両の特性、前方車両の運転者の特性などに応じて、適正車間距離対応テンプレートのサイズを補正するようにしてもよい。
【0071】
[車両の構成(実施例4)]
図9は、実施例4に係る車両の構成を示す図である。図9に示すように、記憶部108は、パラメータ記憶部108cを有する。パラメータ記憶部108cは、運転者の特性や自車両の特性、前方車両の運転者の特性などに応じて、適正車間距離対応テンプレートのサイズを補正するためのパラメータを記憶する。なお、テンプレート記憶部108bには、上述した各種特性を考慮せず、平均サイズの車両について、走行速度に応じた確保すべき車間距離に対応するサイズのテンプレートを記憶しているものとする。
【0072】
ここで、自車両の運転者の特性とは、例えば、運転者の年齢や運転暦などである。また、自車両の特性とは、例えば、自車両の乗車人数または荷重などである。また、前方車両の運転者の特性とは、公安委員会により車両への設置が義務付けられている所定のマークにより識別可能な運転者の運転能力である。いわゆる「わかばマーク」が前方車両に設置されている場合には、運転者が初心者であるために運転能力が未熟であるものと判断する。また、いわゆる「もみじマーク」が前方車両に設置されている場合には、運転者が高齢者であるために運転能力が低下しているものと判断する。
【0073】
パラメータ記憶部108cは、例えば、運転者の年齢が反射神経の衰え始める範囲にある場合には、制動距離が長くなってしまう恐れがある。よって、パラメータ記憶部108cは、年齢が高いほど車間距離がより長く確保されていることを確認できるように、適正車間距離対応テンプレートのサイズを小さく補正するための所定のパラメータを年齢ごとに記憶する。
【0074】
また、パラメータ記憶部108cは、例えば、運転者の運転暦が運転技術の熟練していないと考えられる年数である場合には、制動距離が長くなってしまう恐れがある。よって、パラメータ記憶部108cは、運転暦が浅いほど車間距離がより長く確保されていることを確認できるように、適正車間距離対応テンプレートのサイズを小さく補正するための所定のパラメータを運転暦ごとに記憶する。
【0075】
また、パラメータ記憶部108cは、自車両の乗車人数が多い場合、または自車両の荷量が重い場合には、制動距離が長くなってしまう恐れがある。よって、パラメータ記憶部108cは、乗車人数が多いほど、または自車両の荷量が重いほど、車間距離がより長く確保されていることを確認できるように、適正車間距離対応テンプレートのサイズを小さく補正するための所定のパラメータを乗車人数または自車両の荷重ごとに記憶する。
【0076】
また、パラメータ記憶部108cは、前方の車両の運転者が初心者あるいは高齢者である場合には、前方車両により危険な状況に陥る恐れがある。よって、パラメータ記憶部108cは、前方の車両の運転者が初心者あるいは高齢者である場合に、車間距離がより長く確保されていることを確認できるように、適正車間距離対応テンプレートのサイズを小さく補正するための所定のパラメータを記憶する。
【0077】
入力部103は、運転開始前に、上述した運転者の年齢や運転暦などの特性、乗車人数、荷重などの自車両の特性の入力を運転者から受け付ける。
【0078】
画像処理部110aは、画像取得部101により入力された前方車両の画像から、前方車両の運転者の特性を判断するための所定のマークを検出した場合には、前方車両の車種および車体の色とともに、運転者の特性を記録する。
【0079】
車間距離判定部110bは、ナンバープレートの種別および自車両の走行速度に対応する適正車間距離対応テンプレートをテンプレート記憶部108bから読み込む。さらに、車間距離判定部110bは、自車両の特性、運転者の特性および前方車両の運転者の特性に応じたパラメータをパラメータ記憶部108cから読み込む。そして、車間距離判定部110bは、読み込んだパラメータを用いて、適正車間距離対応テンプレートのサイズを補正する。
【0080】
[車両間隔管理部による処理(実施例4)]
図10は、実施例4に係る車両間隔管理部による処理の流れを示す図である。図10に示す処理は、上述した運転者の年齢や運転暦などの特性、乗車人数などの自車両の特性の入力を予め運転者から受け付けている前提で開始されるものとする。なお、実施例4に係る車両間隔管理部による処理は、図10に示すステップS1002、ステップS1003およびステップS1008の処理が、上述した実施例2とは異なる。
【0081】
すなわち、図10に示すように、画像処理部110aは、画像内に映し出された前方車両の車種、車体の色のデータおよび前方車両の運転者の特性を取得する(ステップS1002)。そして、画像処理部110aは、前方車両の車種、車体の色および運転者の特性に関するデータを内部的な記憶部に記録する(ステップS1003)。車間距離判定部110bは、自車両の特性、運転者の特性および前方車両の運転者の特性に応じたパラメータにより、適正車間距離対応テンプレートのサイズを補正する(ステップS1008)。
【0082】
[実施例4による効果]
実施例4によれば、運転者の年齢や運転暦などの特性、乗車人数または荷重などの自車両の特性、初心者や高齢者などの前方車両の運転者の特性を加味した車間距離に対する運転評価を行うことができる。
【実施例5】
【0083】
以下、本願の開示する車両間隔管理装置、車両間隔管理方法および車両間隔管理プログラムの他の実施形態を説明する。
【0084】
(1)装置構成等
例えば、図2に示した車両間隔管理部110の構成は機能概念的なものであり、必ずしも物理的に図示の如く構成されていることを要しない。例えば、図2に示す車両間隔管理部110の画像処理部110aと、車間距離判定部110bとを機能的または物理的に統合してもよい。このように、車両間隔管理部110の全部または一部を、各種の負荷や使用状況などに応じて、任意の単位で機能的または物理的に分散・統合して構成することができる。
【0085】
(2)車両間隔管理方法
上述してきた実施例により、以下に説明するような車両間隔管理方法が実現される。この車両間隔管理方法は上述した車両間隔管理部110に適用される。この車両間隔管理方法は、選択ステップと、取得ステップと、判断ステップとを含む。
【0086】
上述した選択ステップは、車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部から該データテーブルを読み込み、該読み込んだテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する。
【0087】
上述した取得ステップは、運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する。
【0088】
上述した判断ステップは、上述した選択ステップにより選択されたテンプレートと、上述した取得ステップにより取得されたナンバープレートの画像とに基づき、運転中の車両と、運転中の車両の前方を走行中の車両との車間距離の適否を判断する。
【0089】
(3)車両間隔管理プログラム
また、例えば、上述の実施例にて説明した車両間隔管理部110により実行される各種の処理は、あらかじめ用意されたプログラムをパーソナルコンピュータやワークステーションなどのコンピュータシステムで実行することによって実現することもできる。なお、車両間隔管理部110の各種の処理については、例えば、図6、9、10等を参照されたい。
【0090】
そこで、以下では、図11を用いて、上述の実施例にて説明した車両間隔管理部110により実行される処理と同様の機能を実現する車両間隔管理プログラムを実行するコンピュータの一例を説明する。図11は、車両間隔管理プログラムを実行するコンピュータの一例を示す図である。
【0091】
図11に示すように、車両間隔管理部110として機能するコンピュータ400は、各種演算処理を実行するCPU(Central Processing Unit)410と、ユーザからのデータの入力を受け付ける入力装置420と、モニタ430を有する。
【0092】
また、コンピュータ400は、図11に示すように、記憶媒体からプログラム等を読取る媒体読取装置440と、ネットワークを介して他のコンピュータとの間でデータの授受を行うネットワークインターフェース装置450を有する。また、コンピュータ400は、図11に示すように、各種情報を一時記憶するRAM(Random Access Memory)460と、ハードディスク装置470とを有する。そして、各装置410〜470は、バス480に接続される。
【0093】
なお、CPU410の代わりに、例えば、MPU(Micro Processing Unit)などの電子回路、ASIC(Application Specific Integrated Circuit)やFPGA(Field Programmable Gate Array)などの集積回路を用いることもできる。また、RAM460の代わりに、フラッシュメモリ(flash memory)などの半導体メモリ素子を用いることもできる。
【0094】
ハードディスク装置470には、上述した車両間隔管理部110の機能と同様の機能を発揮する車両間隔管理プログラム471および車両間隔管理用データ472が記憶されている。なお、この車両間隔管理プログラム471を適宜分散させて、ネットワークを介して通信可能に接続された他のコンピュータの記憶部に記憶させておくこともできる。
【0095】
そして、CPU410が、車両間隔管理プログラム471をハードディスク装置470から読み出してRAM460に展開することにより、図11に示すように、車両間隔管理プログラム471は車両間隔管理プロセス461として機能する。車両間隔管理プロセス461は、ハードディスク装置470から読み出した車両間隔管理用データ472等を適宜RAM460上の自身に割当てられた領域に展開し、この展開した各種データに基づいて各種処理を実行する。
【0096】
なお、車両間隔管理プロセス461は、例えば、図2に示した車両間隔管理部110の画像処理部110aおよび車間距離判定部110bにて実行される処理を含む。なお、車両間隔管理部110の処理機能部にて実行される処理は、例えば、上述の実施例にて説明した図6、9、10等に示す処理に対応する。
【0097】
なお、車両間隔管理プログラム471については、必ずしも最初からハードディスク装置470に記憶させておく必要はない。例えば、コンピュータ400に挿入されるフレキシブルディスク(FD)、CD−ROM、DVDディスク、光磁気ディスク、ICカードなどの「可搬用の物理媒体」に各プログラムを記憶させておく。そして、コンピュータ400がこれらから各プログラムを読み出して実行するようにしてもよい。
【0098】
さらには、公衆回線、インターネット、LAN、WANなどを介してコンピュータ400に接続される「他のコンピュータ(またはサーバ)」などに各プログラムを記憶させておく。そして、コンピュータ400がこれらから各プログラムを読み出して実行するようにしてもよい。
【0099】
以上の実施例を含む実施形態に関し、さらに以下の付記を開示する。
【0100】
(付記1)車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部と、
前記記憶部に記憶されたデータテーブルに基づき、前記運転中の車両の速度に対応したサイズのテンプレートを選択する選択部と、
運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得部と、
前記選択部により選択されたテンプレートと、前記取得部により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断部と
を有することを特徴とする車両間隔管理装置。
【0101】
(付記2)前記運転中の車両の位置情報を取得する位置情報取得部と、
前記位置情報取得部により位置情報が取得された時刻を取得する時刻情報取得部と、
前記取得部により取得されたナンバープレートの画像から、前記前方を走行中の車両との車間距離を計算する計算部と、
前記判断部により前記車間距離が適当ではないと判断された場合に、前記取得部により取得された画像と、前記情報取得部により取得された前記情報と、前記計算部により計算された前記車間距離とを対応付けて記憶部に記録する記録部と
をさらに有することを特徴とする付記1に記載の車両間隔管理装置。
【0102】
(付記3)前記判断部により前記車間距離が適当ではないと判断された場合に、前記運転中の車両の運転者に警告を通知する警告通知部をさらに有することを特徴とする付記1または2に記載の車両間隔管理装置。
【0103】
(付記4)前記運転中の車両の速度と、前記取得部により取得されたナンバープレートの画像とに基づいて、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との間の相対速度を計算する相対速度計算部をさらに有し、
前記選択部は、前記相対速度計算部により計算された前記相対速度に対応したテンプレートを選択することを特徴とする付記1または2に記載の車両間隔管理装置。
【0104】
(付記5)車両の運転者の属性あるいは車両の属性に応じて前記テンプレートのサイズを修正するためのパラメータを記憶するパラメータ記憶部と、
前記運転中の車両の属性、該車両の運転者の属性および該車両の前方を走行中の車両の運転者の属性に対応する前記パラメータを前記パラメータ記憶部から読み込み、該読み込まれたパラメータを用いて、前記選択部により選択されたテンプレートのサイズを補正する補正部と
をさらに有し、
前記判断部は、前記補正部によりサイズの補正がなされたテンプレートと、前記取得部により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離の適否を判断することを特徴とする付記1または2に記載の車両間隔管理装置。
【0105】
(付記6)前記車両間隔管理装置に適用される車両間隔管理方法であって、
車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部から該データテーブルを読み込み、該読み込んだテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する選択ステップと、
前記運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得ステップと、
前記選択ステップにより選択されたテンプレートと、前記取得ステップにより取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断ステップと
を含むことを特徴とする車両間隔管理方法。
【0106】
(付記7)前記運転中の車両の位置情報を取得する位置情報取得ステップと、
前記位置情報取得ステップにより位置情報が取得された時刻を取得する時刻取得ステップと、
前記取得ステップにより取得されたナンバープレートの画像から、前記前方を走行中の車両との車間距離を計算する計算ステップと、
前記判断ステップにより前記車間距離が適当ではないと判断された場合に、前記取得ステップにより取得された画像と、前記位置情報取得ステップにより取得された位置情報と、前記時刻取得ステップにより取得された時刻と、前記計算ステップにより計算された前記車間距離とを対応付けて記憶部に記録する記録ステップと
をさらに含んだことを特徴とする付記6に記載の車両間隔管理方法。
【0107】
(付記8)前記判断ステップにより前記車間距離が適当ではないと判断された場合に、前記運転中の車両の運転者に警告を通知する警告通知ステップをさらに含んだことを特徴とする付記6または7に記載の車両間隔管理方法。
【0108】
(付記9)前記車両間隔管理装置として機能するコンピュータに実行させる車両間隔管理プログラムであって、
前記コンピュータに、
車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部から該データテーブルを読み込み、該読み込んだテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する選択手順と、
前記運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得手順と、
前記選択手順により選択されたテンプレートと、前記取得手順により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断手順と
を実行させることを特徴とする車両間隔管理プログラム。
【0109】
(付記10)前記コンピュータに、
前記運転中の車両の位置情報を取得する位置情報取得手順と、
前記位置情報取得手順により位置情報が取得された時刻を取得する時刻取得手順と、
前記取得手順により取得されたナンバープレートの画像から、前記前方を走行中の車両との車間距離を計算する計算手順と、
前記判断手順により前記車間距離が適当ではないと判断された場合に、前記取得手順により取得された画像と、前記位置情報取得手順により取得された位置情報と、前記時刻取得手順により取得された時刻と、前記計算手順により計算された前記車間距離とを対応付けて記憶部に記録する記録手順と
をさらに実行させることを特徴とする付記9に記載の車両間隔管理プログラム。
【0110】
(付記11)前記コンピュータに、
前記判断手順により前記車間距離が適当ではないと判断された場合に、前記運転中の車両の運転者に警告を通知する警告通知手順をさらに実行させることを特徴とする付記9または10に記載の車両間隔管理プログラム。
【符号の説明】
【0111】
10 車両間隔管理装置
11 記憶部
12 選択部
13 取得部
14 判断部
100 車両
101 画像取得部
102 車速センサー
103 入力部
104 表示部
105 音声出力部
106 位置情報取得部
107 時刻情報取得部
108 記憶部
109 外部記憶書込部
110 車両間隔管理部
110a 画像処理部
110b 車間距離判定部
200 運転評価装置
210 表示部
220 記憶部
230 運転評価情報出力部
300 印刷装置
400 コンピュータ
410 CPU
420 入力装置
430 モニタ
440 媒体読取装置
450 ネットワークインターフェース装置
460 RAM
461 車両間隔管理プロセス
470 ハードディスク装置
471 車両間隔管理プログラム
472 車両間隔管理用データ
【特許請求の範囲】
【請求項1】
車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部と、
前記記憶部に記憶されたデータテーブルに基づき、前記運転中の車両の速度に対応したサイズのテンプレートを選択する選択部と、
運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得部と、
前記選択部により選択されたテンプレートと、前記取得部により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断部と
を有することを特徴とする車両間隔管理装置。
【請求項2】
前記運転中の車両の位置情報を取得する位置情報取得部と、
前記位置情報取得部により位置情報が取得された時刻を取得する時刻情報取得部と、
前記判断部により前記車間距離が適当ではないと判断された場合に、前記取得部により取得された画像と、前記位置情報取得部により取得された前記位置情報と、前記時刻情報取得部により取得された前記時刻とを対応付けて記憶部に記録する記録部と
をさらに有することを特徴とする請求項1に記載の車両間隔管理装置。
【請求項3】
前記運転中の車両の速度と、前記取得部により取得されたナンバープレートの画像とに基づいて、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との間の相対速度を計算する相対速度計算部をさらに有し、
前記選択部は、前記相対速度計算部により計算された前記相対速度に対応したテンプレートを選択することを特徴とする請求項1または2に記載の車両間隔管理装置。
【請求項4】
車両の運転者の属性あるいは車両の属性に応じて前記テンプレートのサイズを補正するためのパラメータを記憶するパラメータ記憶部と、
前記運転中の車両の属性、該車両の運転者の属性および該車両の前方を走行中の車両の運転者の属性に対応する前記パラメータを前記パラメータ記憶部から読み込み、該読み込まれたパラメータを用いて、前記選択部により選択されたテンプレートのサイズを補正する補正部と
をさらに有し、
前記判断部は、前記補正部によりサイズの補正がなされたテンプレートと、前記取得部により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離の適否を判断することを特徴とする請求項1または2に記載の車両間隔管理装置。
【請求項5】
車両間隔管理装置に適用される車両間隔管理方法であって、
車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部から該データテーブルを読み込み、該読み込んだテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する選択ステップと、
前記運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得ステップと、
前記選択ステップにより選択されたテンプレートと、前記取得ステップにより取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断ステップと
を含むことを特徴とする車両間隔管理方法。
【請求項6】
車両間隔管理装置として機能するコンピュータに実行させる車両間隔管理プログラムであって、
前記コンピュータに、
車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部から該データテーブルを読み込み、該読み込んだテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する選択手順と、
前記運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得手順と、
前記選択手順により選択されたテンプレートと、前記取得手順により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断手順と
を実行させることを特徴とする車両間隔管理プログラム。
【請求項1】
車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部と、
前記記憶部に記憶されたデータテーブルに基づき、前記運転中の車両の速度に対応したサイズのテンプレートを選択する選択部と、
運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得部と、
前記選択部により選択されたテンプレートと、前記取得部により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断部と
を有することを特徴とする車両間隔管理装置。
【請求項2】
前記運転中の車両の位置情報を取得する位置情報取得部と、
前記位置情報取得部により位置情報が取得された時刻を取得する時刻情報取得部と、
前記判断部により前記車間距離が適当ではないと判断された場合に、前記取得部により取得された画像と、前記位置情報取得部により取得された前記位置情報と、前記時刻情報取得部により取得された前記時刻とを対応付けて記憶部に記録する記録部と
をさらに有することを特徴とする請求項1に記載の車両間隔管理装置。
【請求項3】
前記運転中の車両の速度と、前記取得部により取得されたナンバープレートの画像とに基づいて、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との間の相対速度を計算する相対速度計算部をさらに有し、
前記選択部は、前記相対速度計算部により計算された前記相対速度に対応したテンプレートを選択することを特徴とする請求項1または2に記載の車両間隔管理装置。
【請求項4】
車両の運転者の属性あるいは車両の属性に応じて前記テンプレートのサイズを補正するためのパラメータを記憶するパラメータ記憶部と、
前記運転中の車両の属性、該車両の運転者の属性および該車両の前方を走行中の車両の運転者の属性に対応する前記パラメータを前記パラメータ記憶部から読み込み、該読み込まれたパラメータを用いて、前記選択部により選択されたテンプレートのサイズを補正する補正部と
をさらに有し、
前記判断部は、前記補正部によりサイズの補正がなされたテンプレートと、前記取得部により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離の適否を判断することを特徴とする請求項1または2に記載の車両間隔管理装置。
【請求項5】
車両間隔管理装置に適用される車両間隔管理方法であって、
車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部から該データテーブルを読み込み、該読み込んだテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する選択ステップと、
前記運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得ステップと、
前記選択ステップにより選択されたテンプレートと、前記取得ステップにより取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断ステップと
を含むことを特徴とする車両間隔管理方法。
【請求項6】
車両間隔管理装置として機能するコンピュータに実行させる車両間隔管理プログラムであって、
前記コンピュータに、
車両の速度と、サイズの異なるテンプレートとを対応づけたデータテーブルを記憶する記憶部から該データテーブルを読み込み、該読み込んだテーブルに基づき、運転中の車両の速度に対応したサイズのテンプレートを選択する選択手順と、
前記運転中の車両の前方を走行中の車両のナンバープレートの画像を取得する取得手順と、
前記選択手順により選択されたテンプレートと、前記取得手順により取得されたナンバープレートの画像とに基づき、前記運転中の車両と、前記運転中の車両の前方を走行中の車両との車間距離に関する判断をする判断手順と
を実行させることを特徴とする車両間隔管理プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−197947(P2011−197947A)
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願番号】特願2010−63207(P2010−63207)
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成23年10月6日(2011.10.6)
【国際特許分類】
【出願日】平成22年3月18日(2010.3.18)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]