
車両
【課題】制動時に車体傾斜を伴い易い車両であっても、姿勢の傾きによって乗員に与える不安を抑制しつつ急制動し得る車両を提供すること。
【解決手段】本発明の車両によれば、車体に設けられている左右一対の車輪は、トウ角調整装置によってそれぞれ独立してトウ角を調整できると共に、車輪位置移動装置によって車体に対する相対的な位置を移動させることができるように構成され、制動手段によるトウ角調整装置及び車輪位置移動装置の作動によって、車輪にトウ角が付与されると共に、車輪の位置を車体に対して相対的に進行方向へ移動される。よって、制動時には、車輪のトウ角と車体に対する相対的位置との両方が調整されるので、制動時に生じる姿勢の傾きによって乗員に与える不安感を抑制することができる。
【解決手段】本発明の車両によれば、車体に設けられている左右一対の車輪は、トウ角調整装置によってそれぞれ独立してトウ角を調整できると共に、車輪位置移動装置によって車体に対する相対的な位置を移動させることができるように構成され、制動手段によるトウ角調整装置及び車輪位置移動装置の作動によって、車輪にトウ角が付与されると共に、車輪の位置を車体に対して相対的に進行方向へ移動される。よって、制動時には、車輪のトウ角と車体に対する相対的位置との両方が調整されるので、制動時に生じる姿勢の傾きによって乗員に与える不安感を抑制することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、左右一対の車輪を有する車両、又は重心が高く不安定な車両に関し、特に、姿勢の傾きによって乗員に与える不安感を抑制しつつ急制動し得る車両に関する。
【背景技術】
【0002】
従来、特開2005−39962号公報(特許文献1)に記載される搬送体など、左右一対の車輪が同軸上に設けられた二輪車が提案されている。かかる従来の二輪車は、車体の傾斜角を変えて車体重心を変更させることによりバランスを取りつつ走行するように構成されている。
【0003】
また、制動の際には、車輪の回転を抑止する力に対する反作用や、車体にかかる進行方向に対する負の加速度(減速度)により、車体が進行方向(例えば、前進走行中であれば前方)に傾くので、車体を後方に傾けて車体重心を進行方向と反対方向(例えば、前進走行中であれば後方)に移動させてバランスを取る。
【0004】
ここで、特許文献1に記載される搬送体(車両)は、一方の車輪の回転力と他方の車輪の回転力とを機械的摩擦力によって相互に減殺して制動するものであり、急制動が要求される場合にも十分な制動力を発揮できるように構成されている。
【特許文献1】特開2005−39962号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載される搬送体は、急制動が要求される場合にも十分な制動力を発揮できる上に、車輪の回転を抑止する力に対する反作用が生じないので、その分は、車体が進行方向に傾く力を抑制できるものの、車体に減速度がかかる点については、他の従来の二輪車と変わらない。そのため、この特許文献1に記載される搬送体においても、制動時には、他の従来の二輪車と同様に車体を進行方向と反対方向に傾ける必要があった。
【0006】
車体を進行方向と反対方向に傾けると、それに伴い乗員も傾くため、乗員の視界が常態から大きく変動する。例えば、前進走行中の制動時には、乗員が上方を向くことになるために路面が視界から外れ、一方で、バック走行中の制動時には、乗員が下方を向くことになるために路面が目の前に迫ってくる。このような視界の変化は、乗員に不安感を与えるという問題点があった。
【0007】
一方で、制動時に、乗員が不安を感じることがないように車体の傾斜量を小さくすることも考えられるが、その場合には、減速度を小さくせざるを得ず、そのために制動距離が伸びて、乗員が望む減速度に必ずしも対応できない状況が生じる。よって、例えば、乗員が障害物を回避するべく急制動を望む場合であっても、車体の傾斜量に制限があるために、望む減速度を得ることができず、障害物と接触するおそれが生じる。
【0008】
本発明は、上述した問題点を解決するためになされたものであり、例えば、制動時に車体傾斜を伴い易い車両であっても、姿勢の傾きによって乗員に与える不安を抑制しつつ急制動し得る車両を提供することを目的としている。
【課題を解決するための手段】
【0009】
この目的を達成するために、請求項1記載の車両は、車体に設けられた少なくとも左右一対の車輪と、それらの車輪のトウ角をそれぞれ独立して調整するトウ角調整装置と、前記車輪の位置を前記車体に対して相対的に移動させる車輪位置調整装置と、前記トウ角調整装置及び前記車輪位置調整装置を作動させて、前記車輪にトウ角を付与すると共に、前記車輪の位置を前記車体に対して相対的に進行方向へ移動させて制動する制動手段と、を備えている。
【0010】
請求項2記載の車両は、請求項1記載の車両において、一端が前記車輪に接続され、他端が回動可能に前記車体に取り付けられた腕部と、その腕部を回動させる駆動力を付与するアクチュエータと、を備え、前記トウ角調整装置及び前記車輪位置移動装置は、前記アクチュエータを含んで構成される。
【0011】
請求項3記載の車両は、請求項1又は2に記載の車両において、減速度を指示する減速度指示手段と、前記減速度指示手段により指示された減速度に応じて、前記車輪のトウ角及び前記車輪の車体に対する相対的位置に関する指令値を決定する制動指令値決定手段と、を備え、前記制動手段は、前記制動指令値決定手段により決定された指令値に基づいて、前記車輪のトウ角を付与すると共に、前記車輪の位置を前記車体に対して相対的に進行方向へ移動させて制動する。
【0012】
請求項4記載の車両は、請求項3記載の車両において、前記車体の傾斜量を調整する車体傾斜量調整装置と、前記制動指令値決定手段により決定された指令値に応じて、前記車体の傾斜量に対応する傾斜角指令値を決定する傾斜角指令値決定手段と、その傾斜角指令値決定手段により決定された傾斜角指令値に基づいて、前記車体傾斜量調整装置を作動させ、前記車体の傾斜量を調整する制動補助手段と、を備えている。
【発明の効果】
【0013】
請求項1記載の車両によれば、車体に設けられている左右一対の車輪は、トウ角調整装置によってそれぞれ独立してトウ角を調整できると共に、車輪位置移動装置によって車体に対する相対的な位置を移動させることができるように構成されている。
【0014】
そして、トウ角調整装置及び車輪位置移動装置が、制動手段により作動されて、車輪にトウ角が付与されると共に、車輪の位置が車体に対して相対的に進行方向へ移動される。かかるトウ角の調整と車体に対する車輪の相対的位置の変更により、車両が制動される。
【0015】
よって、トウ角(トウイン角又はトウアウト角)が車輪に付与されたことにより、車輪に横力を発生させることができ、その横力を制動力として作用させることができる。
【0016】
ここで、車輪の位置が車体に対して相対的に進行方向へ移動されるので、車体重心の位置を相対的に進行方向と反対方向に移動させることができる。よって、二輪車のように制動時に姿勢が変化し易い車両であっても、車体を進行方向と反対方向に大きく傾けることなく、車体にかかる減速度とのバランスを取ることができるので、乗員に与える不安感を払拭することができる。
【0017】
即ち、請求項1記載の車両によれば、制動時には、車輪のトウ角と車体に対する相対的位置との両方が調整されるので、制動時に生じる姿勢の傾きによって乗員に与える不安感を抑制することができるという効果がある。
【0018】
請求項2記載の車両によれば、請求項1記載の車両の奏する効果に加えて、次の効果を奏する。一端が直接的又は間接的に車輪に接続されて、他端が回動可能に車体に取り付けられている腕部を有しており、かかる腕部が、アクチュエータによる駆動力の付与によって回動されるように構成されている。
【0019】
よって、車輪は、腕部の回動に伴い、その回動方向に旋回され、その結果として、車輪にトウ角を付すことができると共に、車体に対する車輪の相対的位置を変えることができる。即ち、トウ角の変化と車体に対する相対的位置の変化とを連動させて行うことができるという効果がある。
【0020】
また、トウ角の変化と車体に対する相対的位置の変化とが連動するので、制御を簡素化できるという効果がある。例えば、制御指令値決定手段による指令値の決定を、トウ角又は車体に対する相対的位置のいずれか一方の指令値に限定することができる。
【0021】
さらに、トウ角調整装置及び車輪位置移動装置は、このアクチュエータを含む装置として構成されている。即ち、トウ角調整装置及び車輪位置移動装置は、かかるアクチュエータの駆動によって、車輪のトウ角と車体に対する相対的位置との両方を変化させることができる。従って、トウ角調整装置及び車輪位置移動装置を共通化でき、装置構成を簡素化できるという効果がある。
【0022】
請求項3記載の車両によれば、請求項1又は2に記載の車両の奏する効果に加えて、次の効果を奏する。減速度指示手段により減速度が指示された場合には、制動指令値決定手段により、車輪のトウ角及び車輪の車体に対する相対的位置に関する指令値が、減速度指示手段により指示された減速度に応じて決定される。
【0023】
なお、請求項3において、「制御指令値決定手段」により決定される「車輪のトウ角及び車輪の車体に対する相対的位置に関する指令値」は、これら両方の指令値を個々に決定することだけでなく、一方の指令値(例えば、トウ角の指令値)を決定した場合に、他方の指令値(例えば、車体に対する相対的位置の指令値)がその決定された指令値に連動して決定されるような場合も含むことを意図している。
【0024】
そして、制御手段により、制動指令値決定手段により決定された指令値に基づいて、車輪にトウ角が付与されると共に、車輪の位置が車体に対して相対的に進行方向へ移動され、それによって制動される。
【0025】
従って、制動時に車輪へ付与されるトウ角は、指示された減速度に応じた大きさとされるので、指示された減速度に応じた制動力を得ることができる。よって、乗員の望む減速度に応じた制動力を得ることができるという効果がある。
【0026】
また、車輪の車体に対する相対的位置もまた、検出された減速度に応じて調整される。よって、乗員の望む減速度で制動する場合においても、車体を進行方向と反対方向に大きく傾けることなく車体のバランスを取ることができるので、乗員に与える不安感を払拭することができるという効果がある。
【0027】
請求項4記載の車両によれば、請求項3記載の車両の奏する効果に加えて、次の効果を奏する。車体の傾斜量に対応する傾斜角指令値が、傾斜角指令値決定手段により、制動指令値決定手段により決定された指令値に応じて決定される。そして、車体傾斜量調整装置が制動補助手段により作動されて、車体の傾斜量が、傾斜角指令値決定手段により決定された傾斜角指令値に基づいて調整される。
【0028】
よって、補助的に車体が傾斜されて制動時のバランスがとられるので、安定性がより向上されるという効果がある。なお、車体に対する車輪の相対的位置の移動によって車体重心の位置を移動させていることが前提であるので、従来の二輪車に比べ、車体に同じ減速度がかかる場合であっても車体の傾斜量は小さくて済み、乗員の安心感を維持することが可能となる。
【発明を実施するための最良の形態】
【0029】
以下、本発明の好ましい実施の形態について添付図面を参照して説明する。なお、添付図面における矢印U−D,L−R,F−Bは、それぞれ、車両1の上下方向、左右方向、前後方向を示している。
【0030】
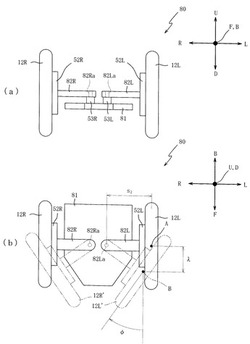
まず、図1及び図2を参照して、本発明の一実施形態における車両1の構成について説明する。図1(a)は、本発明の一実施形態における車両1の正面図であり、図1(b)は、車両1の左側面の側面図である。また、図2(a)は、車両1における走行部80の正面図であり、図2(b)は、走行部80の上面図である。
【0031】
図1に示すように、車両1は、左右一対の車輪12L,12Rなどを有する走行部80と、支持部材14を介して走行部80の上方(矢印U側)に配置され、乗員が乗車可能な搭乗部11とから主に構成され、左右一対の車輪12L,12Rを回転駆動装置52(52L,52R)によって回転駆動することにより走行するものである。
【0032】
図1に示すように、搭乗部11は、座席11aと、アームレスト11bと、フットレスト(図示せず)とから主に構成される。ここで、座席11aは、乗員が着座するための部位であり、乗員の尻部を支持する座面部11a1と、乗員の背部を支持する背面部11a2とを有している。
【0033】
アームレスト11bは、乗員の左右上腕部を支持するためのものであり、座席11aの左右両側(矢印L側及び矢印R側)にそれぞれ配設されている。このアームレスト11bの一方(矢印R側)には、ジョイスティック装置51が取着されている。
【0034】
ジョイスティック装置51は、乗員によって操作される装置であり、乗員によってなされた操作状態(操作方向及び操作量)に応じて車両1の走行状態(例えば、走行速度や、加速度量又は減速度量など)を変更することができる。
【0035】
なお、図示されないフットレストは、乗員の脚部を支持するためのものであり、座席11aの前方側(矢印F側)下方に配設されている。また、座面部11a1の裏面(矢印D側の面)には、ケース41が配設されている。このケース41は、制御装置70(図4参照)、加速度センサ、姿勢センサなどの各種センサ装置(図示せず)、インバータ装置(図示せず)、バッテリー装置(図示せず)などを収納するものである。ここで、図示しないバッテリー装置は、回転駆動装置52の駆動源であると共に、制御装置70に制御用の低電圧電源を供給する装置である。なお、本実施形態では、ケース41を、座面部11a1の裏面側に配設するように構成するが、これらを収納するケースが背面部11a裏面側(矢印B側の面)に設けられる構成であってもよい。
【0036】
図1及び図2に示すように、走行部80は、一対の車輪12(12L,12R)と、それらの車輪12を回転駆動する回転駆動装置52(52L,52R)と、一端側が左の回転駆動装置52Lに固着された左アーム82Lと、一端側が右の回転駆動装置52Rに固着された右アーム82Rと、ベース部材81と、そのベース部材81上に載置され、軸部82La,82Raを介して左右アーム82L,82Rの端部に接続されているアクチュエータ53L,53Rとから主に構成される。
【0037】
本実施形態の車両1は、アクチュエータ53L,53Rの駆動により軸部82La,82Raが回動され、その結果として、左アーム82Lの他端側にて回転駆動装置52Lを介して取り付けられている左車輪12Lと、右アーム82Rの他端側にて回転駆動装置52Rを介して取り付けられている右車輪12Rとをそれぞれ、軸部82La,82Ra周りに旋回させることができる。
【0038】
図2(b)に示すように、アクチュエータ53L,53Rの駆動により、左右車輪12L,12Rが軸部82La,82Ra周りに旋回されると、例えば、2点鎖線で示す車輪12L’,12Rに位置する。このように、本実施形態の車両1は、左右車輪12L,12Rを軸部82La,82Ra周りに旋回することにより、車輪12(12L,12R)にトウイン側のトウ角を付与することができる。
【0039】
よって、本実施形態の車両1は、車輪12(12L,12R)にトウイン側のトウ角を付与することができるので、トウ角の付与により車輪に生じた横力を制動力として作用させることができる。
【0040】
また、図2(b)に示すように、左右車輪12L,12Rを軸部82La,82Ra周りに旋回した場合、ベース部材81に対する左右車輪12L,12Rの相対的位置を前方(矢印F側)へ移動させることができる。このように、ベース部材81に対する左右車輪12L,12Rの相対的位置が前方(矢印F側)へ移動されると、その結果として、車両1の車体重心が後方へ移動することになる。
【0041】
詳細は後述するが、車両1の車体重心が後方へ移動することにより、車体の加速度(減速度)に対するバランサ効果が生じ、そのバランサ効果によって、減速時における車体の傾斜を抑制することができる。
【0042】
ここで、本実施形態の車両1では、一端が間接的に車輪12L,12Rの側面に接続されているアーム12L,12Rの他端が、軸部82La,82Ra周りに回動可能に取り付けられている。即ち、アーム12L,12Rは、端部が水平方向の回動可能にベース部材81に取り付けられているので、アクチュエータ53L,53Rの駆動によって、車輪12L,12Rへのトウ角の付与と、ベース部材81に対する左右車輪12L,12Rの相対的位置の移動とを連動させて行うことができる。
【0043】
つまり、左車輪12Lを例とすると、図2(b)に示すように、軸部82Laの中心と車輪12Lの厚さ方向中心との距離をs2とした場合、トウ角φと車輪前進距離λとの間には、以下の式(1)が成立する。
λ=s2sinφ …(1)
【0044】
式(1)によれば、トウ角φが決まれば車輪前進距離λ(即ち、車体に対する車輪12の相対的な進行方向の距離)が必然的に決まり、一方で、車輪前進距離λが決まればトウ角φが必然的に決まることになる。なお、車輪前進距離λは、初期状態(本実施形態では、トウ角φが0度である状態)における車輪(図2(b)では、車輪12L)の接地点Aと移動後の車輪(図2(b)では、車輪12L’)の接地点Bとの間における前進方向(矢印F側)の移動距離である。
【0045】
よって、本実施形態の車両1によれば、アクチュエータ53L,53Rの駆動によって、車輪12L,12Rへのトウ角の付与と、ベース部材81に対する左右車輪12L,12Rの相対的位置の移動とを連動させて行うことができ、制動時には、トウ角の付与による制動力と、ベース部材81に対する左右車輪12L,12Rの相対的位置の移動によるバランサ効果とを同時に発現させることができる。
【0046】
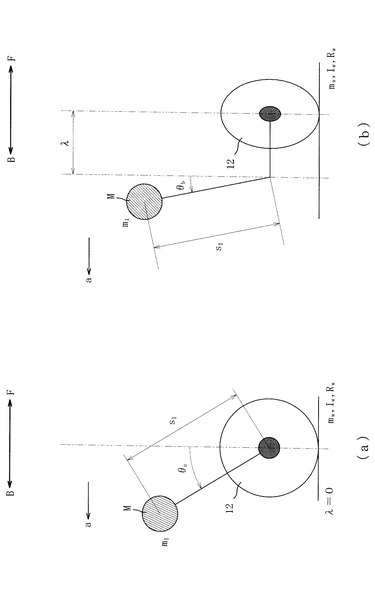
ここで、図3を参照して、左右車輪12L,12Rを軸部82La,82Ra周りに旋回させたことによって奏する効果について説明する。図3(a)は、車輪12L,12Rが初期状態にある場合における、車輪12(12L,12R)と車体重心Mとの位置関係を示す模式図である。また、図3(b)は、車輪12L,12Rを軸部82La,82Ra周りに旋回させた場合における、車輪12(12L,12R)と車体重心Mとの位置関係を示す模式図である。
【0047】
図3(a)に示すように、車輪12L,12Rが初期状態にある場合、即ち、車輪12L,12Rトウ角φが0度である場合には、車体加速度(減速度)aに対して釣り合う車体傾斜角θaは、車体加速度aに対する慣性力の作用を示す値αとトルク反作用を示す値γとから、以下の式(2)により表される。
θa=α+sin−1(sinαtanγ) …(2)
【0048】
なお、慣性力の作用を示す値α及びトルク反作用を示す値γは、それぞれ、以下の式(3a)及び(3b)により表される。
tanα=a …(3a)
tanγ=(M×Rw)/(m1×s1) …(3b)
【0049】
ここで、式(3b)において、m1は、車体質量であり、s1は、車体重心距離であり、Rwは、車輪外径である。また、M=m1+mw+(Iw/Rw2)であり、ここで、m1は、車体質量であり、mwは、車輪質量であり、Iwは、車輪慣性モーメントであり、Rwは、車輪外径である。
【0050】
一方、図3(b)に示すように、車輪12L,12Rを軸部82La,82Ra周りに旋回させた場合、即ち、車輪12L,12Rトウイン側のトウ角φ(φ>0)が付与された場合には、車輪12L,12Rの相対的位置がベース部材81に対して進行方向である前方(矢印F側)へ移動するので、その結果として、車両1の車体重心が後方(矢印B側)へ移動したことによるバランサ効果が生じる。
【0051】
このバランサ効果を示す値βは、以下の式(4)により表される。
tanβ=λ/s1 …(4)
【0052】
式(4)から明らかなように、バランサ効果を示す値をβは、車輪前進距離λの値が大きい程、大きい。即ち、ベース部材81に対する車輪12L,12Rの相対的位置の移動量が大きい程、バランサ効果は大きくなる。
【0053】
よって、車輪12L,12Rを軸部82La,82Ra周りに旋回させた場合には、車体加速度(減速度)aに対して釣り合う車体傾斜角θbは、減速度aに対する慣性力の作用を示す値αとトルク反作用を示す値γだけでなく、バランサ効果を示す値βを用いて、以下の式(5)により表すことができる。
θb=α−β+sin−1(sinαcosβtanγ) …(5)
【0054】
式(5)及び式(2)から明らかなように、車輪12L,12Rを軸部82La,82Ra周りに旋回させると、車両1の車体重心が後方(矢印B側)へ移動したことによるバランサ効果が生じ、その結果、車体傾斜角θbは、車輪12L,12Rが初期状態にある場合の車体傾斜角θaに比べて小さくなる。
【0055】
よって、車輪12L,12Rを軸部82La,82Ra周りに旋回させ、車輪12L,12Rの相対的位置がベース部材81に対して進行方向である前方(矢印F側)へ移動させることにより、減速時に傾ける車体の傾斜量を少なくすることができ、車体を傾斜させずとも、大きく減速させることが可能となる。あるいは、車体を傾斜させる必要があったとしても、その傾斜量は、車体(ベース部材81)に対する左右車輪12L,12Rの相対的位置が初期状態のまま変更されない従来の二輪車に比べて小さくて済む。
【0056】
従って、本実施形態の車両1によれば、減速時における車体の傾斜を可能な限り小さくすることができるので、乗員の姿勢が大きく変わらず、乗員に与える不安感を払拭することができる。
【0057】
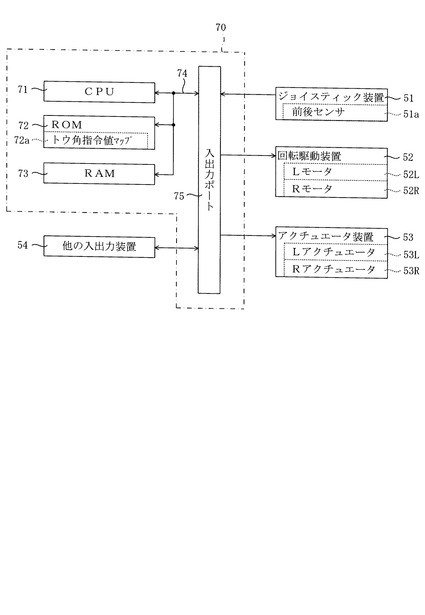
次いで、図4及び図5を参照して、上記構成を有する車両1の電気的構成について説明する。図4は、車両1の電気的構成を示すブロック図であり、図5は、ROM72に格納されているトウ角指令値マップ72aの内容を示す模式図である。
【0058】
制御装置70は、車両1の各部を制御するための制御装置であり、図4に示すように、CPU71、ROM72及びRAM73を備え、これらはバスライン74を介して入出力ポート75に接続されている。また、入出力ポート75には、ジョイスティック装置51等の複数の装置が接続されている。
【0059】
CPU71は、バスライン74により接続された各部を制御する演算装置であり、ROM72は、CPU71により実行される制御プログラム(例えば、図6に示すフローチャート)や固定値データ等を格納した書き換え不能な不揮発性のメモリであり、RAM73は、制御プログラムの実行時に各種のワークデータやフラグ等を書き換え可能に記憶するためのメモリである。
【0060】
ROM72は、トウ角指令値マップ72aを備えている。ここで、図5を参照して、トウ角指令値マップ72aについて説明する。図5に示すように、トウ角指令値マップ72aは、乗員によるジョイスティック装置51の操作によって指示された減速度(単位:G)と、その減速度に対して付与すべき車輪12(21L,12R)のトウ角φ(単位:度)とを対応付けたマップである。
【0061】
なお、図5に示すトウ角指令値マップ72aにおいて、縦軸は、乗員により指示された減速度を示し、下から上へ向かうに従い、指示された減速度が大きいことを示す。一方で、横軸は、付与すべきトウ角φが0度から90度までの範囲で割り当てられている。図5に示すトウ角指令値マップ72aによれば、乗員により指示された減速度が大きくなる程、より大きなトウ角φが対応付けられている。
【0062】
詳細は後述するが、走行制御処理(図6参照)において、CPU71は、このトウ角指令値マップ72aの内容に基づいて、乗員が要求する(所望する)減速度に応じた車輪12(21L,12R)のトウ角φの指令値を決定する。よって、図5に示すトウ角指令値マップ72aによれば、乗員が要求する減速度が大きい程、より大きなトウ角が車輪12(21L,12R)に付与されて、より大きな制動力を得ることができる。
【0063】
図4に戻って説明する。上述した制御装置70に対し、ジョイスティック装置51から、乗員により指示される走行状態に関する情報(正の加速度又は負の加速度(減速度)の指令値)が供給される構成になっており、制御装置70は、入力された情報に応じた制御信号を回転駆動装置52やアクチュエータ装置53へ出力し、その結果として、車両1の走行及び制動が制御される。
【0064】
特に、詳細は後述するが、本実施形態における制御装置70は、ジョイスティック装置51から制御装置71へ減速度が供給された場合には、入力された減速度に関する情報に基づいてトウ角の指令値を決定し(図6参照)、その指令値がアクチュエータ装置53へ出力される。その結果、Lアクチュエータ53L及びRアクチュエータ53Rが駆動されるので、左右車輪12L,12Rが軸部82La,82Ra周りに旋回されて、車両1が制動される。
【0065】
ジョイスティック装置51は、上述したように、車両1を運転する際に乗員が操作する装置であり、乗員により操作される操作レバー(図1参照)と、その操作レバーの操作状態を検出するための前後センサ51a及び左右センサ(図示せず)と、前後センサ51a及び左右センサ(図示せず)の検出結果を処理してCPU71に出力する処理回路(図示せず)とを主に備えている。
【0066】
前後センサ51aは、操作レバーの前後方向(図1における矢印F−B方向)への操作状態(位置及び前後操作量)を検出するためのセンサであり、CPU71は、前後センサ51aの検出結果(操作レバーの位置及び前後操作量)に基づいて、回転駆動装置52の駆動状態を制御する。これにより、車両1は、乗員による操作レバーの前後操作量に応じた加速度量(加速度量a)で加速又は減速される。
【0067】
具体的には、乗員がジョイスティック装置51の操作レバーを前方側(図1における矢印F側)へ操作した場合には、車両1は、その操作量に基づいてCPU71により取得された正の加速度で加速される。一方で、乗員がジョイスティック装置51の操作レバーを後方側(図1における矢印B側)へ操作した場合には、車両1は、その操作量に基づいてCPU71により取得された負の加速度(減速度)で制動される。
【0068】
回転駆動装置52は、上述したように、左右の車輪12L,12Rを回転駆動させるための駆動装置であり、左車輪12Lに回転駆動力を付与するホイールモータであるLモータ52Lと、右車輪12Rに回転駆動力を付与するホイールモータであるRモータ52Rと、それら各モータ52L,52RをCPU71から出力される駆動トルク、速度、回転方向などの各種信号に基づいて駆動制御する駆動回路(図示せず)とを主に備えて構成されている。
【0069】
アクチュエータ装置53は、上述したように、左アーム82Lを軸部82La周りに回動するLアクチュエータ53L、及び右アーム82Rを軸部82Ra周りに回動するRアクチュエータ53Rを駆動するための装置である。このアクチュエータ装置53は、回転アクチュエータ(モータ)であるLアクチュエータ53Lと、同様の回転アクチュエータであるRアクチュエータ53Rと、これらのアクチュエータ53L,53Rを駆動制御する駆動回路(図示せず)とを主に備えて構成されている。
【0070】
また、他の入出力装置54としては、例えば、車両1の走行状態(走行速度や走行距離など)を検出する検出装置、その検出装置により検出された走行状態を表示して乗員に報知する表示装置(図示せず)、或いは、車両1に作用する加速度を検出する加速度センサなどが例示される。
【0071】
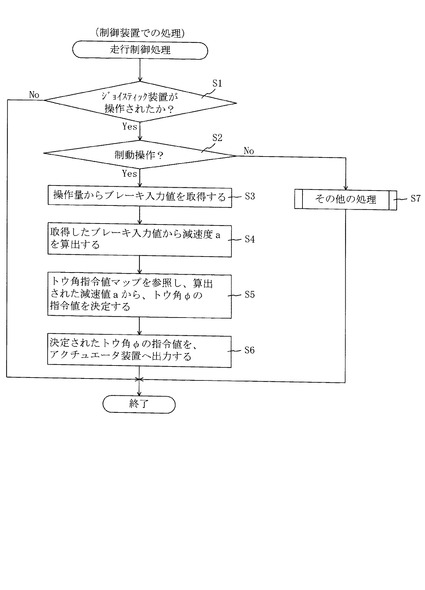
次に、図6のフローチャートを参照して、上記のように構成される本実施形態の車両1における制御装置70による、走行制御処理について説明する。図6は、車両1の制御装置70(CPU71)で実行される走行制御処理を示すフローチャートである。
【0072】
図6に示す走行制御処理は、制御装置70に電源が投入されている間、CPU71によって所定時間毎(例えば、0.01sec毎)に繰り返し実行される処理であり、まず、ジョイスティック装置51が乗員によって操作されたかを確認する(S1)。S1の処理により確認した結果、ジョイスティック装置51が操作されていない場合には(S1:No)、そのまま、この走行制御処理を終了する。
【0073】
一方で、S1の処理により確認した結果、ジョイスティック装置51が操作された場合には(S1:Yes)、その操作が制動操作であるか、即ち、ジョイスティック装置51の操作レバーが後方側(図1における矢印B側)へ操作されたかを確認する(S2)。
【0074】
S2の処理により確認した結果、制動操作でない場合には(S2:No)、車両1をジョイスティック装置51の操作状態に応じた走行状態へ移行するその他の処理を実行し(S7)、この走行制御処理を終了する。例えば、S2の処理により、ジョイスティック装置51の操作レバーが前方側(図1における矢印F側)へ操作されたことが確認された場合には、その他の処理(S7)の実行により、車両1が操作レバーの操作量に応じた正の加速度で加速される。
【0075】
一方で、S2の処理により確認した結果、ジョイスティック装置51への操作が制動動作である場合には(S2:Yes)、操作レバーの操作量からブレーキ入力値を取得し(S3)、取得したブレーキ入力値から減速度aを算出する(S4)。よって、S3及びS4の処理によって、乗員がジョイスティック装置51の操作によって指示した減速度、即ち、乗員が所望する減速度が取得(算出)される。
【0076】
S4の処理後、トウ角指令値マップ72aを参照し、算出された減速度aから、トウ角φの指令値を決定し(S5)、決定されたトウ角φの指令値をアクチュエータ装置53(53L,53R)へ出力し(S6)、この走行制御処理を終了する。
【0077】
S6の処理により、S5の処理によって決定されたトウ角φの指令値がアクチュエータ装置53(53L,53R)へ出力されると、アクチュエータ装置53(53L,53R)が指令値に応じた量だけ駆動され、その結果として、車輪12(12L,12R)にトウ角φが付与される。
【0078】
ここで、S5の処理によって決定されるトウ角φの指令値は、乗員による操作レバーの操作量に応じた値、即ち、乗員が所望する減速度に応じた値であるので、乗員が所望する減速度に応じた減速度(制動力)を得ることのできるトウ角φが、S6の処理の結果として、車輪12(12L,12R)に付与されるのである。
【0079】
以上、説明したように、本実施形態の車両1によれば、乗員により制動が指示された場合に、一対の車輪12(12L,12R)の側面に間接的に接続されているアーム82L,82Rが、アクチュエータ53L,53Rの駆動によって軸部82La,82Ra周りに回動され、その結果として、左右車輪12L,12Rにトウ角が付与されると共に、該車輪12のベース部材81(即ち、車体)に対する相対的位置が進行方向である前方へと移動される。
【0080】
よって、トウ角が車輪12に付与されたことにより制動力が得られると共に、車体重心の位置を相対的に進行方向と反対方向に移動させることができ、その結果として、制動時に生じる姿勢の傾きによって乗員に与える不安感を抑制することができる。
【0081】
ここで、本実施形態の車両1によれば、乗員によるジョイスティック装置51の操作状態に応じたトウ角の指令値が決定されるので、乗員の望む減速度に応じた制動力を得ることができる共に、そのように乗員の望む減速度で制動する場合においても、車体を進行方向と反対方向に大きく傾けることなく車体のバランスを取ることができ、乗員に与える不安感を払拭することができる。
【0082】
また、本実施形態の車両1によれば、左右のアクチュエータ53L,53Rの駆動により、左右のアーム82L,82Rが軸部82La,82Raの周りに回動され、その結果として、各車輪12L,12Rのトウ角の変化とベース部材81に対する相対的位置の変化との両方を連動させることができる(又は、同時に変化させることができる)。
【0083】
よって、このように各車輪12(12L,12R)のトウ角の変化と車体に対する相対的位置の変化とが連動するので、トウ角と車体に対する相対的位置との両方を調整する際の制御を簡略化することができる。即ち、乗員によるジョイスティック装置51の操作状態に応じて決定されるトウ角の指令値のみで、トウ角と車体に対する相対的位置との両方を調整することができる。
【0084】
以上、実施の形態に基づき本発明を説明したが、本発明は上記実施の形態に何ら限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々の改良変形が可能であることは容易に推察できるものである。
【0085】
例えば、上記実施形態では、左右のアクチュエータ53L,53Rの駆動により、各車輪12L,12Rのトウ角の変化とベース部材81に対する相対的位置の変化との両方を連動させることができるように構成したが、車輪12のトウ角を調整する装置と、車輪12の位置を車体に対して相対的に移動させる装置とを別々に設け、車輪12のトウ角と車体に対する相対的位置とをそれぞれ独立して変化(調整)する構成としてもよい。なお、車輪12のトウ角を調整する装置と車輪12の位置を車体に対して相対的に移動させる装置とが共通化されている場合、装置構成を簡素化できるという点において好ましい。
【0086】
また、車輪12のトウ角と車体に対する相対的位置とをそれぞれ独立して変化させる場合には、トウ角の指令値と車体に対する相対的位置の指令値とを別々に取得するように構成してもよい。
【0087】
また、上記実施形態は、減速度に応じたトウ角の指令値を取得する構成としたが、車体に対する相対的位置の指令値を減速度に応じて取得するように構成してもよい。例えば、トウ角指令値マップ72aと同様に、乗員により指示された減速度と車輪前進距離λ(図3参照)とを対応付けたマップに基づいて車体に対して位置すべき車輪12の相対的位置を取得してもよい。
【0088】
また、上記実施形態では、ジョイスティック装置51の操作状態に応じた減速度、即ち、乗員により指示された減速度に応じて車輪12のトウ角の指令値を取得するように構成したが、加速度計により検出された減速度に応じてトウ角の指令値を取得するような構成であってもよい。
【0089】
なお、上記実施形態では、乗員により操作されるジョイスティック装置51を、アームレスト11bに執着される構成としたが、ジョイスティック装置51に換えて、有線又は無線で制御装置70に接続されるリモコン装置などとしてもよい。また、このジョイスティック装置51を乗員が制動を指示する操作部(指示入力部)として構成したが、ジョイスティック装置51に換えて足踏みペダルなどの操作部材を制動指示用の操作部として構成してもよい。
【0090】
また、上記実施形態では、前進時の制動についてのみ説明したが、本発明はバック走行時の制動に対しても同様に適用可能である。具体的には、バック走行時に乗員から制動指示があった場合に、アクチュエータ53L,53Rを駆動させ、左車輪12Lが上方から見て反時計回りに旋回させ、右車輪12Rが上方から見て時計回りに旋回させればよい。その結果、トウ角が車輪12に付与されると共に、車体重心の位置を相対的に進行方向である後方側と反対方向である前方側に移動させることができ、前進時の制動において奏する効果と同様の効果を奏することができる。
【0091】
また、上記実施形態では、左右車輪12L,12Rのそれぞれに対してアクチュエータ53L,53Rを設けるように構成したが、1つのアクチュエータによって両車輪12L,12Rを旋回させ、トウ角の付与及び車体に対する相対的位置の調整を行うように構成してもよい。
【0092】
また、制動の際に、車輪12のトウ角及び車体に対する相対的位置の調整に加え、制動補助手段によって車体傾斜角を調整する構成としてもよい。例えば、走行制御処理(図6参照)におけるS5の処理により決定されたトウ角φから、式(1)に従い車輪前進距離λを求め、トウ角φ及び車輪前進距離λなどから式(5)に基づいて車体傾斜角θbの指令値を決定することにより、車体の傾斜量を調整することができる。
【0093】
このように、制動の際に、車輪12のトウ角及び車体に対する相対的位置の調整に加え、車体傾斜角を調整することにより、制動時の車体のバランスがとられるので、安定性がより向上される、なお、車体に対する車輪12の相対的位置の移動によって車体重心の位置を移動させていることが前提であるので、従来の二輪車に比べ、車体に同じ減速度がかかる場合であっても車体の傾斜量は小さくて済み、乗員の安心感を維持することが可能である。
【0094】
また、上記実施形態では、車両1を二輪車として構成したが、少なくとも左右一対の車輪を有する車両(例えば、左右一対の車輪を有する三輪車)に対して適用でき、その場合においても上記実施形態と同様の効果を奏する。
【0095】
なお、上記実施形態において、請求項1記載の制動手段としては、S6の処理が該当し、請求項3記載の減速度検出手段としては、S3,S4の処理が該当し、請求項3記載の制動指令値決定手段としては、S5の処理が該当する。
【図面の簡単な説明】
【0096】
【図1】(a)は、本発明の一実施形態における車両の正面図であり、(b)は、車両の側面図である。
【図2】(a)は、走行部の正面図であり、(b)は、走行部の上面図である。
【図3】(a)は、車輪が初期状態にある場合における、車輪と車体重心との位置関係を示す模式図であり、(b)は、車輪を軸部周りに旋回させた場合における、車輪と車体重心との位置関係を示す模式図である。
【図4】車両の電気的構成を示すブロック図である。
【図5】トウ角指令値マップの内容を示す模式図である。
【図6】車両の制御装置で実行される走行制御処理を示すフローチャートである。
【符号の説明】
【0097】
12 車輪
12L 左車輪(車輪)
12R 右車輪(車輪)
53 アクチュエータ装置(トウ角調整手段,車輪位置調整手段)
53L Lアクチュエータ(トウ角調整手段の一部,車輪位置調整手段の一部)
53R Rアクチュエータ(トウ角調整手段の一部,車輪位置調整手段の一部)
82L アーム(腕部)
82R アーム(腕部)
【技術分野】
【0001】
本発明は、左右一対の車輪を有する車両、又は重心が高く不安定な車両に関し、特に、姿勢の傾きによって乗員に与える不安感を抑制しつつ急制動し得る車両に関する。
【背景技術】
【0002】
従来、特開2005−39962号公報(特許文献1)に記載される搬送体など、左右一対の車輪が同軸上に設けられた二輪車が提案されている。かかる従来の二輪車は、車体の傾斜角を変えて車体重心を変更させることによりバランスを取りつつ走行するように構成されている。
【0003】
また、制動の際には、車輪の回転を抑止する力に対する反作用や、車体にかかる進行方向に対する負の加速度(減速度)により、車体が進行方向(例えば、前進走行中であれば前方)に傾くので、車体を後方に傾けて車体重心を進行方向と反対方向(例えば、前進走行中であれば後方)に移動させてバランスを取る。
【0004】
ここで、特許文献1に記載される搬送体(車両)は、一方の車輪の回転力と他方の車輪の回転力とを機械的摩擦力によって相互に減殺して制動するものであり、急制動が要求される場合にも十分な制動力を発揮できるように構成されている。
【特許文献1】特開2005−39962号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載される搬送体は、急制動が要求される場合にも十分な制動力を発揮できる上に、車輪の回転を抑止する力に対する反作用が生じないので、その分は、車体が進行方向に傾く力を抑制できるものの、車体に減速度がかかる点については、他の従来の二輪車と変わらない。そのため、この特許文献1に記載される搬送体においても、制動時には、他の従来の二輪車と同様に車体を進行方向と反対方向に傾ける必要があった。
【0006】
車体を進行方向と反対方向に傾けると、それに伴い乗員も傾くため、乗員の視界が常態から大きく変動する。例えば、前進走行中の制動時には、乗員が上方を向くことになるために路面が視界から外れ、一方で、バック走行中の制動時には、乗員が下方を向くことになるために路面が目の前に迫ってくる。このような視界の変化は、乗員に不安感を与えるという問題点があった。
【0007】
一方で、制動時に、乗員が不安を感じることがないように車体の傾斜量を小さくすることも考えられるが、その場合には、減速度を小さくせざるを得ず、そのために制動距離が伸びて、乗員が望む減速度に必ずしも対応できない状況が生じる。よって、例えば、乗員が障害物を回避するべく急制動を望む場合であっても、車体の傾斜量に制限があるために、望む減速度を得ることができず、障害物と接触するおそれが生じる。
【0008】
本発明は、上述した問題点を解決するためになされたものであり、例えば、制動時に車体傾斜を伴い易い車両であっても、姿勢の傾きによって乗員に与える不安を抑制しつつ急制動し得る車両を提供することを目的としている。
【課題を解決するための手段】
【0009】
この目的を達成するために、請求項1記載の車両は、車体に設けられた少なくとも左右一対の車輪と、それらの車輪のトウ角をそれぞれ独立して調整するトウ角調整装置と、前記車輪の位置を前記車体に対して相対的に移動させる車輪位置調整装置と、前記トウ角調整装置及び前記車輪位置調整装置を作動させて、前記車輪にトウ角を付与すると共に、前記車輪の位置を前記車体に対して相対的に進行方向へ移動させて制動する制動手段と、を備えている。
【0010】
請求項2記載の車両は、請求項1記載の車両において、一端が前記車輪に接続され、他端が回動可能に前記車体に取り付けられた腕部と、その腕部を回動させる駆動力を付与するアクチュエータと、を備え、前記トウ角調整装置及び前記車輪位置移動装置は、前記アクチュエータを含んで構成される。
【0011】
請求項3記載の車両は、請求項1又は2に記載の車両において、減速度を指示する減速度指示手段と、前記減速度指示手段により指示された減速度に応じて、前記車輪のトウ角及び前記車輪の車体に対する相対的位置に関する指令値を決定する制動指令値決定手段と、を備え、前記制動手段は、前記制動指令値決定手段により決定された指令値に基づいて、前記車輪のトウ角を付与すると共に、前記車輪の位置を前記車体に対して相対的に進行方向へ移動させて制動する。
【0012】
請求項4記載の車両は、請求項3記載の車両において、前記車体の傾斜量を調整する車体傾斜量調整装置と、前記制動指令値決定手段により決定された指令値に応じて、前記車体の傾斜量に対応する傾斜角指令値を決定する傾斜角指令値決定手段と、その傾斜角指令値決定手段により決定された傾斜角指令値に基づいて、前記車体傾斜量調整装置を作動させ、前記車体の傾斜量を調整する制動補助手段と、を備えている。
【発明の効果】
【0013】
請求項1記載の車両によれば、車体に設けられている左右一対の車輪は、トウ角調整装置によってそれぞれ独立してトウ角を調整できると共に、車輪位置移動装置によって車体に対する相対的な位置を移動させることができるように構成されている。
【0014】
そして、トウ角調整装置及び車輪位置移動装置が、制動手段により作動されて、車輪にトウ角が付与されると共に、車輪の位置が車体に対して相対的に進行方向へ移動される。かかるトウ角の調整と車体に対する車輪の相対的位置の変更により、車両が制動される。
【0015】
よって、トウ角(トウイン角又はトウアウト角)が車輪に付与されたことにより、車輪に横力を発生させることができ、その横力を制動力として作用させることができる。
【0016】
ここで、車輪の位置が車体に対して相対的に進行方向へ移動されるので、車体重心の位置を相対的に進行方向と反対方向に移動させることができる。よって、二輪車のように制動時に姿勢が変化し易い車両であっても、車体を進行方向と反対方向に大きく傾けることなく、車体にかかる減速度とのバランスを取ることができるので、乗員に与える不安感を払拭することができる。
【0017】
即ち、請求項1記載の車両によれば、制動時には、車輪のトウ角と車体に対する相対的位置との両方が調整されるので、制動時に生じる姿勢の傾きによって乗員に与える不安感を抑制することができるという効果がある。
【0018】
請求項2記載の車両によれば、請求項1記載の車両の奏する効果に加えて、次の効果を奏する。一端が直接的又は間接的に車輪に接続されて、他端が回動可能に車体に取り付けられている腕部を有しており、かかる腕部が、アクチュエータによる駆動力の付与によって回動されるように構成されている。
【0019】
よって、車輪は、腕部の回動に伴い、その回動方向に旋回され、その結果として、車輪にトウ角を付すことができると共に、車体に対する車輪の相対的位置を変えることができる。即ち、トウ角の変化と車体に対する相対的位置の変化とを連動させて行うことができるという効果がある。
【0020】
また、トウ角の変化と車体に対する相対的位置の変化とが連動するので、制御を簡素化できるという効果がある。例えば、制御指令値決定手段による指令値の決定を、トウ角又は車体に対する相対的位置のいずれか一方の指令値に限定することができる。
【0021】
さらに、トウ角調整装置及び車輪位置移動装置は、このアクチュエータを含む装置として構成されている。即ち、トウ角調整装置及び車輪位置移動装置は、かかるアクチュエータの駆動によって、車輪のトウ角と車体に対する相対的位置との両方を変化させることができる。従って、トウ角調整装置及び車輪位置移動装置を共通化でき、装置構成を簡素化できるという効果がある。
【0022】
請求項3記載の車両によれば、請求項1又は2に記載の車両の奏する効果に加えて、次の効果を奏する。減速度指示手段により減速度が指示された場合には、制動指令値決定手段により、車輪のトウ角及び車輪の車体に対する相対的位置に関する指令値が、減速度指示手段により指示された減速度に応じて決定される。
【0023】
なお、請求項3において、「制御指令値決定手段」により決定される「車輪のトウ角及び車輪の車体に対する相対的位置に関する指令値」は、これら両方の指令値を個々に決定することだけでなく、一方の指令値(例えば、トウ角の指令値)を決定した場合に、他方の指令値(例えば、車体に対する相対的位置の指令値)がその決定された指令値に連動して決定されるような場合も含むことを意図している。
【0024】
そして、制御手段により、制動指令値決定手段により決定された指令値に基づいて、車輪にトウ角が付与されると共に、車輪の位置が車体に対して相対的に進行方向へ移動され、それによって制動される。
【0025】
従って、制動時に車輪へ付与されるトウ角は、指示された減速度に応じた大きさとされるので、指示された減速度に応じた制動力を得ることができる。よって、乗員の望む減速度に応じた制動力を得ることができるという効果がある。
【0026】
また、車輪の車体に対する相対的位置もまた、検出された減速度に応じて調整される。よって、乗員の望む減速度で制動する場合においても、車体を進行方向と反対方向に大きく傾けることなく車体のバランスを取ることができるので、乗員に与える不安感を払拭することができるという効果がある。
【0027】
請求項4記載の車両によれば、請求項3記載の車両の奏する効果に加えて、次の効果を奏する。車体の傾斜量に対応する傾斜角指令値が、傾斜角指令値決定手段により、制動指令値決定手段により決定された指令値に応じて決定される。そして、車体傾斜量調整装置が制動補助手段により作動されて、車体の傾斜量が、傾斜角指令値決定手段により決定された傾斜角指令値に基づいて調整される。
【0028】
よって、補助的に車体が傾斜されて制動時のバランスがとられるので、安定性がより向上されるという効果がある。なお、車体に対する車輪の相対的位置の移動によって車体重心の位置を移動させていることが前提であるので、従来の二輪車に比べ、車体に同じ減速度がかかる場合であっても車体の傾斜量は小さくて済み、乗員の安心感を維持することが可能となる。
【発明を実施するための最良の形態】
【0029】
以下、本発明の好ましい実施の形態について添付図面を参照して説明する。なお、添付図面における矢印U−D,L−R,F−Bは、それぞれ、車両1の上下方向、左右方向、前後方向を示している。
【0030】
まず、図1及び図2を参照して、本発明の一実施形態における車両1の構成について説明する。図1(a)は、本発明の一実施形態における車両1の正面図であり、図1(b)は、車両1の左側面の側面図である。また、図2(a)は、車両1における走行部80の正面図であり、図2(b)は、走行部80の上面図である。
【0031】
図1に示すように、車両1は、左右一対の車輪12L,12Rなどを有する走行部80と、支持部材14を介して走行部80の上方(矢印U側)に配置され、乗員が乗車可能な搭乗部11とから主に構成され、左右一対の車輪12L,12Rを回転駆動装置52(52L,52R)によって回転駆動することにより走行するものである。
【0032】
図1に示すように、搭乗部11は、座席11aと、アームレスト11bと、フットレスト(図示せず)とから主に構成される。ここで、座席11aは、乗員が着座するための部位であり、乗員の尻部を支持する座面部11a1と、乗員の背部を支持する背面部11a2とを有している。
【0033】
アームレスト11bは、乗員の左右上腕部を支持するためのものであり、座席11aの左右両側(矢印L側及び矢印R側)にそれぞれ配設されている。このアームレスト11bの一方(矢印R側)には、ジョイスティック装置51が取着されている。
【0034】
ジョイスティック装置51は、乗員によって操作される装置であり、乗員によってなされた操作状態(操作方向及び操作量)に応じて車両1の走行状態(例えば、走行速度や、加速度量又は減速度量など)を変更することができる。
【0035】
なお、図示されないフットレストは、乗員の脚部を支持するためのものであり、座席11aの前方側(矢印F側)下方に配設されている。また、座面部11a1の裏面(矢印D側の面)には、ケース41が配設されている。このケース41は、制御装置70(図4参照)、加速度センサ、姿勢センサなどの各種センサ装置(図示せず)、インバータ装置(図示せず)、バッテリー装置(図示せず)などを収納するものである。ここで、図示しないバッテリー装置は、回転駆動装置52の駆動源であると共に、制御装置70に制御用の低電圧電源を供給する装置である。なお、本実施形態では、ケース41を、座面部11a1の裏面側に配設するように構成するが、これらを収納するケースが背面部11a裏面側(矢印B側の面)に設けられる構成であってもよい。
【0036】
図1及び図2に示すように、走行部80は、一対の車輪12(12L,12R)と、それらの車輪12を回転駆動する回転駆動装置52(52L,52R)と、一端側が左の回転駆動装置52Lに固着された左アーム82Lと、一端側が右の回転駆動装置52Rに固着された右アーム82Rと、ベース部材81と、そのベース部材81上に載置され、軸部82La,82Raを介して左右アーム82L,82Rの端部に接続されているアクチュエータ53L,53Rとから主に構成される。
【0037】
本実施形態の車両1は、アクチュエータ53L,53Rの駆動により軸部82La,82Raが回動され、その結果として、左アーム82Lの他端側にて回転駆動装置52Lを介して取り付けられている左車輪12Lと、右アーム82Rの他端側にて回転駆動装置52Rを介して取り付けられている右車輪12Rとをそれぞれ、軸部82La,82Ra周りに旋回させることができる。
【0038】
図2(b)に示すように、アクチュエータ53L,53Rの駆動により、左右車輪12L,12Rが軸部82La,82Ra周りに旋回されると、例えば、2点鎖線で示す車輪12L’,12Rに位置する。このように、本実施形態の車両1は、左右車輪12L,12Rを軸部82La,82Ra周りに旋回することにより、車輪12(12L,12R)にトウイン側のトウ角を付与することができる。
【0039】
よって、本実施形態の車両1は、車輪12(12L,12R)にトウイン側のトウ角を付与することができるので、トウ角の付与により車輪に生じた横力を制動力として作用させることができる。
【0040】
また、図2(b)に示すように、左右車輪12L,12Rを軸部82La,82Ra周りに旋回した場合、ベース部材81に対する左右車輪12L,12Rの相対的位置を前方(矢印F側)へ移動させることができる。このように、ベース部材81に対する左右車輪12L,12Rの相対的位置が前方(矢印F側)へ移動されると、その結果として、車両1の車体重心が後方へ移動することになる。
【0041】
詳細は後述するが、車両1の車体重心が後方へ移動することにより、車体の加速度(減速度)に対するバランサ効果が生じ、そのバランサ効果によって、減速時における車体の傾斜を抑制することができる。
【0042】
ここで、本実施形態の車両1では、一端が間接的に車輪12L,12Rの側面に接続されているアーム12L,12Rの他端が、軸部82La,82Ra周りに回動可能に取り付けられている。即ち、アーム12L,12Rは、端部が水平方向の回動可能にベース部材81に取り付けられているので、アクチュエータ53L,53Rの駆動によって、車輪12L,12Rへのトウ角の付与と、ベース部材81に対する左右車輪12L,12Rの相対的位置の移動とを連動させて行うことができる。
【0043】
つまり、左車輪12Lを例とすると、図2(b)に示すように、軸部82Laの中心と車輪12Lの厚さ方向中心との距離をs2とした場合、トウ角φと車輪前進距離λとの間には、以下の式(1)が成立する。
λ=s2sinφ …(1)
【0044】
式(1)によれば、トウ角φが決まれば車輪前進距離λ(即ち、車体に対する車輪12の相対的な進行方向の距離)が必然的に決まり、一方で、車輪前進距離λが決まればトウ角φが必然的に決まることになる。なお、車輪前進距離λは、初期状態(本実施形態では、トウ角φが0度である状態)における車輪(図2(b)では、車輪12L)の接地点Aと移動後の車輪(図2(b)では、車輪12L’)の接地点Bとの間における前進方向(矢印F側)の移動距離である。
【0045】
よって、本実施形態の車両1によれば、アクチュエータ53L,53Rの駆動によって、車輪12L,12Rへのトウ角の付与と、ベース部材81に対する左右車輪12L,12Rの相対的位置の移動とを連動させて行うことができ、制動時には、トウ角の付与による制動力と、ベース部材81に対する左右車輪12L,12Rの相対的位置の移動によるバランサ効果とを同時に発現させることができる。
【0046】
ここで、図3を参照して、左右車輪12L,12Rを軸部82La,82Ra周りに旋回させたことによって奏する効果について説明する。図3(a)は、車輪12L,12Rが初期状態にある場合における、車輪12(12L,12R)と車体重心Mとの位置関係を示す模式図である。また、図3(b)は、車輪12L,12Rを軸部82La,82Ra周りに旋回させた場合における、車輪12(12L,12R)と車体重心Mとの位置関係を示す模式図である。
【0047】
図3(a)に示すように、車輪12L,12Rが初期状態にある場合、即ち、車輪12L,12Rトウ角φが0度である場合には、車体加速度(減速度)aに対して釣り合う車体傾斜角θaは、車体加速度aに対する慣性力の作用を示す値αとトルク反作用を示す値γとから、以下の式(2)により表される。
θa=α+sin−1(sinαtanγ) …(2)
【0048】
なお、慣性力の作用を示す値α及びトルク反作用を示す値γは、それぞれ、以下の式(3a)及び(3b)により表される。
tanα=a …(3a)
tanγ=(M×Rw)/(m1×s1) …(3b)
【0049】
ここで、式(3b)において、m1は、車体質量であり、s1は、車体重心距離であり、Rwは、車輪外径である。また、M=m1+mw+(Iw/Rw2)であり、ここで、m1は、車体質量であり、mwは、車輪質量であり、Iwは、車輪慣性モーメントであり、Rwは、車輪外径である。
【0050】
一方、図3(b)に示すように、車輪12L,12Rを軸部82La,82Ra周りに旋回させた場合、即ち、車輪12L,12Rトウイン側のトウ角φ(φ>0)が付与された場合には、車輪12L,12Rの相対的位置がベース部材81に対して進行方向である前方(矢印F側)へ移動するので、その結果として、車両1の車体重心が後方(矢印B側)へ移動したことによるバランサ効果が生じる。
【0051】
このバランサ効果を示す値βは、以下の式(4)により表される。
tanβ=λ/s1 …(4)
【0052】
式(4)から明らかなように、バランサ効果を示す値をβは、車輪前進距離λの値が大きい程、大きい。即ち、ベース部材81に対する車輪12L,12Rの相対的位置の移動量が大きい程、バランサ効果は大きくなる。
【0053】
よって、車輪12L,12Rを軸部82La,82Ra周りに旋回させた場合には、車体加速度(減速度)aに対して釣り合う車体傾斜角θbは、減速度aに対する慣性力の作用を示す値αとトルク反作用を示す値γだけでなく、バランサ効果を示す値βを用いて、以下の式(5)により表すことができる。
θb=α−β+sin−1(sinαcosβtanγ) …(5)
【0054】
式(5)及び式(2)から明らかなように、車輪12L,12Rを軸部82La,82Ra周りに旋回させると、車両1の車体重心が後方(矢印B側)へ移動したことによるバランサ効果が生じ、その結果、車体傾斜角θbは、車輪12L,12Rが初期状態にある場合の車体傾斜角θaに比べて小さくなる。
【0055】
よって、車輪12L,12Rを軸部82La,82Ra周りに旋回させ、車輪12L,12Rの相対的位置がベース部材81に対して進行方向である前方(矢印F側)へ移動させることにより、減速時に傾ける車体の傾斜量を少なくすることができ、車体を傾斜させずとも、大きく減速させることが可能となる。あるいは、車体を傾斜させる必要があったとしても、その傾斜量は、車体(ベース部材81)に対する左右車輪12L,12Rの相対的位置が初期状態のまま変更されない従来の二輪車に比べて小さくて済む。
【0056】
従って、本実施形態の車両1によれば、減速時における車体の傾斜を可能な限り小さくすることができるので、乗員の姿勢が大きく変わらず、乗員に与える不安感を払拭することができる。
【0057】
次いで、図4及び図5を参照して、上記構成を有する車両1の電気的構成について説明する。図4は、車両1の電気的構成を示すブロック図であり、図5は、ROM72に格納されているトウ角指令値マップ72aの内容を示す模式図である。
【0058】
制御装置70は、車両1の各部を制御するための制御装置であり、図4に示すように、CPU71、ROM72及びRAM73を備え、これらはバスライン74を介して入出力ポート75に接続されている。また、入出力ポート75には、ジョイスティック装置51等の複数の装置が接続されている。
【0059】
CPU71は、バスライン74により接続された各部を制御する演算装置であり、ROM72は、CPU71により実行される制御プログラム(例えば、図6に示すフローチャート)や固定値データ等を格納した書き換え不能な不揮発性のメモリであり、RAM73は、制御プログラムの実行時に各種のワークデータやフラグ等を書き換え可能に記憶するためのメモリである。
【0060】
ROM72は、トウ角指令値マップ72aを備えている。ここで、図5を参照して、トウ角指令値マップ72aについて説明する。図5に示すように、トウ角指令値マップ72aは、乗員によるジョイスティック装置51の操作によって指示された減速度(単位:G)と、その減速度に対して付与すべき車輪12(21L,12R)のトウ角φ(単位:度)とを対応付けたマップである。
【0061】
なお、図5に示すトウ角指令値マップ72aにおいて、縦軸は、乗員により指示された減速度を示し、下から上へ向かうに従い、指示された減速度が大きいことを示す。一方で、横軸は、付与すべきトウ角φが0度から90度までの範囲で割り当てられている。図5に示すトウ角指令値マップ72aによれば、乗員により指示された減速度が大きくなる程、より大きなトウ角φが対応付けられている。
【0062】
詳細は後述するが、走行制御処理(図6参照)において、CPU71は、このトウ角指令値マップ72aの内容に基づいて、乗員が要求する(所望する)減速度に応じた車輪12(21L,12R)のトウ角φの指令値を決定する。よって、図5に示すトウ角指令値マップ72aによれば、乗員が要求する減速度が大きい程、より大きなトウ角が車輪12(21L,12R)に付与されて、より大きな制動力を得ることができる。
【0063】
図4に戻って説明する。上述した制御装置70に対し、ジョイスティック装置51から、乗員により指示される走行状態に関する情報(正の加速度又は負の加速度(減速度)の指令値)が供給される構成になっており、制御装置70は、入力された情報に応じた制御信号を回転駆動装置52やアクチュエータ装置53へ出力し、その結果として、車両1の走行及び制動が制御される。
【0064】
特に、詳細は後述するが、本実施形態における制御装置70は、ジョイスティック装置51から制御装置71へ減速度が供給された場合には、入力された減速度に関する情報に基づいてトウ角の指令値を決定し(図6参照)、その指令値がアクチュエータ装置53へ出力される。その結果、Lアクチュエータ53L及びRアクチュエータ53Rが駆動されるので、左右車輪12L,12Rが軸部82La,82Ra周りに旋回されて、車両1が制動される。
【0065】
ジョイスティック装置51は、上述したように、車両1を運転する際に乗員が操作する装置であり、乗員により操作される操作レバー(図1参照)と、その操作レバーの操作状態を検出するための前後センサ51a及び左右センサ(図示せず)と、前後センサ51a及び左右センサ(図示せず)の検出結果を処理してCPU71に出力する処理回路(図示せず)とを主に備えている。
【0066】
前後センサ51aは、操作レバーの前後方向(図1における矢印F−B方向)への操作状態(位置及び前後操作量)を検出するためのセンサであり、CPU71は、前後センサ51aの検出結果(操作レバーの位置及び前後操作量)に基づいて、回転駆動装置52の駆動状態を制御する。これにより、車両1は、乗員による操作レバーの前後操作量に応じた加速度量(加速度量a)で加速又は減速される。
【0067】
具体的には、乗員がジョイスティック装置51の操作レバーを前方側(図1における矢印F側)へ操作した場合には、車両1は、その操作量に基づいてCPU71により取得された正の加速度で加速される。一方で、乗員がジョイスティック装置51の操作レバーを後方側(図1における矢印B側)へ操作した場合には、車両1は、その操作量に基づいてCPU71により取得された負の加速度(減速度)で制動される。
【0068】
回転駆動装置52は、上述したように、左右の車輪12L,12Rを回転駆動させるための駆動装置であり、左車輪12Lに回転駆動力を付与するホイールモータであるLモータ52Lと、右車輪12Rに回転駆動力を付与するホイールモータであるRモータ52Rと、それら各モータ52L,52RをCPU71から出力される駆動トルク、速度、回転方向などの各種信号に基づいて駆動制御する駆動回路(図示せず)とを主に備えて構成されている。
【0069】
アクチュエータ装置53は、上述したように、左アーム82Lを軸部82La周りに回動するLアクチュエータ53L、及び右アーム82Rを軸部82Ra周りに回動するRアクチュエータ53Rを駆動するための装置である。このアクチュエータ装置53は、回転アクチュエータ(モータ)であるLアクチュエータ53Lと、同様の回転アクチュエータであるRアクチュエータ53Rと、これらのアクチュエータ53L,53Rを駆動制御する駆動回路(図示せず)とを主に備えて構成されている。
【0070】
また、他の入出力装置54としては、例えば、車両1の走行状態(走行速度や走行距離など)を検出する検出装置、その検出装置により検出された走行状態を表示して乗員に報知する表示装置(図示せず)、或いは、車両1に作用する加速度を検出する加速度センサなどが例示される。
【0071】
次に、図6のフローチャートを参照して、上記のように構成される本実施形態の車両1における制御装置70による、走行制御処理について説明する。図6は、車両1の制御装置70(CPU71)で実行される走行制御処理を示すフローチャートである。
【0072】
図6に示す走行制御処理は、制御装置70に電源が投入されている間、CPU71によって所定時間毎(例えば、0.01sec毎)に繰り返し実行される処理であり、まず、ジョイスティック装置51が乗員によって操作されたかを確認する(S1)。S1の処理により確認した結果、ジョイスティック装置51が操作されていない場合には(S1:No)、そのまま、この走行制御処理を終了する。
【0073】
一方で、S1の処理により確認した結果、ジョイスティック装置51が操作された場合には(S1:Yes)、その操作が制動操作であるか、即ち、ジョイスティック装置51の操作レバーが後方側(図1における矢印B側)へ操作されたかを確認する(S2)。
【0074】
S2の処理により確認した結果、制動操作でない場合には(S2:No)、車両1をジョイスティック装置51の操作状態に応じた走行状態へ移行するその他の処理を実行し(S7)、この走行制御処理を終了する。例えば、S2の処理により、ジョイスティック装置51の操作レバーが前方側(図1における矢印F側)へ操作されたことが確認された場合には、その他の処理(S7)の実行により、車両1が操作レバーの操作量に応じた正の加速度で加速される。
【0075】
一方で、S2の処理により確認した結果、ジョイスティック装置51への操作が制動動作である場合には(S2:Yes)、操作レバーの操作量からブレーキ入力値を取得し(S3)、取得したブレーキ入力値から減速度aを算出する(S4)。よって、S3及びS4の処理によって、乗員がジョイスティック装置51の操作によって指示した減速度、即ち、乗員が所望する減速度が取得(算出)される。
【0076】
S4の処理後、トウ角指令値マップ72aを参照し、算出された減速度aから、トウ角φの指令値を決定し(S5)、決定されたトウ角φの指令値をアクチュエータ装置53(53L,53R)へ出力し(S6)、この走行制御処理を終了する。
【0077】
S6の処理により、S5の処理によって決定されたトウ角φの指令値がアクチュエータ装置53(53L,53R)へ出力されると、アクチュエータ装置53(53L,53R)が指令値に応じた量だけ駆動され、その結果として、車輪12(12L,12R)にトウ角φが付与される。
【0078】
ここで、S5の処理によって決定されるトウ角φの指令値は、乗員による操作レバーの操作量に応じた値、即ち、乗員が所望する減速度に応じた値であるので、乗員が所望する減速度に応じた減速度(制動力)を得ることのできるトウ角φが、S6の処理の結果として、車輪12(12L,12R)に付与されるのである。
【0079】
以上、説明したように、本実施形態の車両1によれば、乗員により制動が指示された場合に、一対の車輪12(12L,12R)の側面に間接的に接続されているアーム82L,82Rが、アクチュエータ53L,53Rの駆動によって軸部82La,82Ra周りに回動され、その結果として、左右車輪12L,12Rにトウ角が付与されると共に、該車輪12のベース部材81(即ち、車体)に対する相対的位置が進行方向である前方へと移動される。
【0080】
よって、トウ角が車輪12に付与されたことにより制動力が得られると共に、車体重心の位置を相対的に進行方向と反対方向に移動させることができ、その結果として、制動時に生じる姿勢の傾きによって乗員に与える不安感を抑制することができる。
【0081】
ここで、本実施形態の車両1によれば、乗員によるジョイスティック装置51の操作状態に応じたトウ角の指令値が決定されるので、乗員の望む減速度に応じた制動力を得ることができる共に、そのように乗員の望む減速度で制動する場合においても、車体を進行方向と反対方向に大きく傾けることなく車体のバランスを取ることができ、乗員に与える不安感を払拭することができる。
【0082】
また、本実施形態の車両1によれば、左右のアクチュエータ53L,53Rの駆動により、左右のアーム82L,82Rが軸部82La,82Raの周りに回動され、その結果として、各車輪12L,12Rのトウ角の変化とベース部材81に対する相対的位置の変化との両方を連動させることができる(又は、同時に変化させることができる)。
【0083】
よって、このように各車輪12(12L,12R)のトウ角の変化と車体に対する相対的位置の変化とが連動するので、トウ角と車体に対する相対的位置との両方を調整する際の制御を簡略化することができる。即ち、乗員によるジョイスティック装置51の操作状態に応じて決定されるトウ角の指令値のみで、トウ角と車体に対する相対的位置との両方を調整することができる。
【0084】
以上、実施の形態に基づき本発明を説明したが、本発明は上記実施の形態に何ら限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々の改良変形が可能であることは容易に推察できるものである。
【0085】
例えば、上記実施形態では、左右のアクチュエータ53L,53Rの駆動により、各車輪12L,12Rのトウ角の変化とベース部材81に対する相対的位置の変化との両方を連動させることができるように構成したが、車輪12のトウ角を調整する装置と、車輪12の位置を車体に対して相対的に移動させる装置とを別々に設け、車輪12のトウ角と車体に対する相対的位置とをそれぞれ独立して変化(調整)する構成としてもよい。なお、車輪12のトウ角を調整する装置と車輪12の位置を車体に対して相対的に移動させる装置とが共通化されている場合、装置構成を簡素化できるという点において好ましい。
【0086】
また、車輪12のトウ角と車体に対する相対的位置とをそれぞれ独立して変化させる場合には、トウ角の指令値と車体に対する相対的位置の指令値とを別々に取得するように構成してもよい。
【0087】
また、上記実施形態は、減速度に応じたトウ角の指令値を取得する構成としたが、車体に対する相対的位置の指令値を減速度に応じて取得するように構成してもよい。例えば、トウ角指令値マップ72aと同様に、乗員により指示された減速度と車輪前進距離λ(図3参照)とを対応付けたマップに基づいて車体に対して位置すべき車輪12の相対的位置を取得してもよい。
【0088】
また、上記実施形態では、ジョイスティック装置51の操作状態に応じた減速度、即ち、乗員により指示された減速度に応じて車輪12のトウ角の指令値を取得するように構成したが、加速度計により検出された減速度に応じてトウ角の指令値を取得するような構成であってもよい。
【0089】
なお、上記実施形態では、乗員により操作されるジョイスティック装置51を、アームレスト11bに執着される構成としたが、ジョイスティック装置51に換えて、有線又は無線で制御装置70に接続されるリモコン装置などとしてもよい。また、このジョイスティック装置51を乗員が制動を指示する操作部(指示入力部)として構成したが、ジョイスティック装置51に換えて足踏みペダルなどの操作部材を制動指示用の操作部として構成してもよい。
【0090】
また、上記実施形態では、前進時の制動についてのみ説明したが、本発明はバック走行時の制動に対しても同様に適用可能である。具体的には、バック走行時に乗員から制動指示があった場合に、アクチュエータ53L,53Rを駆動させ、左車輪12Lが上方から見て反時計回りに旋回させ、右車輪12Rが上方から見て時計回りに旋回させればよい。その結果、トウ角が車輪12に付与されると共に、車体重心の位置を相対的に進行方向である後方側と反対方向である前方側に移動させることができ、前進時の制動において奏する効果と同様の効果を奏することができる。
【0091】
また、上記実施形態では、左右車輪12L,12Rのそれぞれに対してアクチュエータ53L,53Rを設けるように構成したが、1つのアクチュエータによって両車輪12L,12Rを旋回させ、トウ角の付与及び車体に対する相対的位置の調整を行うように構成してもよい。
【0092】
また、制動の際に、車輪12のトウ角及び車体に対する相対的位置の調整に加え、制動補助手段によって車体傾斜角を調整する構成としてもよい。例えば、走行制御処理(図6参照)におけるS5の処理により決定されたトウ角φから、式(1)に従い車輪前進距離λを求め、トウ角φ及び車輪前進距離λなどから式(5)に基づいて車体傾斜角θbの指令値を決定することにより、車体の傾斜量を調整することができる。
【0093】
このように、制動の際に、車輪12のトウ角及び車体に対する相対的位置の調整に加え、車体傾斜角を調整することにより、制動時の車体のバランスがとられるので、安定性がより向上される、なお、車体に対する車輪12の相対的位置の移動によって車体重心の位置を移動させていることが前提であるので、従来の二輪車に比べ、車体に同じ減速度がかかる場合であっても車体の傾斜量は小さくて済み、乗員の安心感を維持することが可能である。
【0094】
また、上記実施形態では、車両1を二輪車として構成したが、少なくとも左右一対の車輪を有する車両(例えば、左右一対の車輪を有する三輪車)に対して適用でき、その場合においても上記実施形態と同様の効果を奏する。
【0095】
なお、上記実施形態において、請求項1記載の制動手段としては、S6の処理が該当し、請求項3記載の減速度検出手段としては、S3,S4の処理が該当し、請求項3記載の制動指令値決定手段としては、S5の処理が該当する。
【図面の簡単な説明】
【0096】
【図1】(a)は、本発明の一実施形態における車両の正面図であり、(b)は、車両の側面図である。
【図2】(a)は、走行部の正面図であり、(b)は、走行部の上面図である。
【図3】(a)は、車輪が初期状態にある場合における、車輪と車体重心との位置関係を示す模式図であり、(b)は、車輪を軸部周りに旋回させた場合における、車輪と車体重心との位置関係を示す模式図である。
【図4】車両の電気的構成を示すブロック図である。
【図5】トウ角指令値マップの内容を示す模式図である。
【図6】車両の制御装置で実行される走行制御処理を示すフローチャートである。
【符号の説明】
【0097】
12 車輪
12L 左車輪(車輪)
12R 右車輪(車輪)
53 アクチュエータ装置(トウ角調整手段,車輪位置調整手段)
53L Lアクチュエータ(トウ角調整手段の一部,車輪位置調整手段の一部)
53R Rアクチュエータ(トウ角調整手段の一部,車輪位置調整手段の一部)
82L アーム(腕部)
82R アーム(腕部)
【特許請求の範囲】
【請求項1】
車体に設けられた少なくとも左右一対の車輪と、
それらの車輪のトウ角をそれぞれ独立して調整するトウ角調整装置と、
前記車輪の位置を前記車体に対して相対的に移動させる車輪位置調整装置と、
前記トウ角調整装置及び前記車輪位置調整装置を作動させて、前記車輪にトウ角を付与すると共に、前記車輪の位置を前記車体に対して相対的に進行方向へ移動させて制動する制動手段と、
を備えていることを特徴とする車両。
【請求項2】
一端が前記車輪に接続され、他端が回動可能に前記車体に取り付けられた腕部と、
その腕部を回動させる駆動力を付与するアクチュエータと、を備え、
前記トウ角調整装置及び前記車輪位置移動装置は、前記アクチュエータを含んで構成されることを特徴とする請求項1記載の車両。
【請求項3】
減速度を指示する減速度指示手段と、
前記減速度指示手段により指示された減速度に応じて、前記車輪のトウ角及び前記車輪の車体に対する相対的位置に関する指令値を決定する制動指令値決定手段と、を備え、
前記制動手段は、前記制動指令値決定手段により決定された指令値に基づいて、前記車輪のトウ角を付与すると共に、前記車輪の位置を前記車体に対して相対的に進行方向へ移動させて制動することを特徴とする請求項1又は2に記載の車両。
【請求項4】
前記車体の傾斜量を調整する車体傾斜量調整装置と、
前記制動指令値決定手段により決定された指令値に応じて、前記車体の傾斜量に対応する傾斜角指令値を決定する傾斜角指令値決定手段と、
その傾斜角指令値決定手段により決定された傾斜角指令値に基づいて、前記車体傾斜量調整装置を作動させ、前記車体の傾斜量を調整する制動補助手段と、
を備えていることを特徴とする請求項3記載の車両。
【請求項1】
車体に設けられた少なくとも左右一対の車輪と、
それらの車輪のトウ角をそれぞれ独立して調整するトウ角調整装置と、
前記車輪の位置を前記車体に対して相対的に移動させる車輪位置調整装置と、
前記トウ角調整装置及び前記車輪位置調整装置を作動させて、前記車輪にトウ角を付与すると共に、前記車輪の位置を前記車体に対して相対的に進行方向へ移動させて制動する制動手段と、
を備えていることを特徴とする車両。
【請求項2】
一端が前記車輪に接続され、他端が回動可能に前記車体に取り付けられた腕部と、
その腕部を回動させる駆動力を付与するアクチュエータと、を備え、
前記トウ角調整装置及び前記車輪位置移動装置は、前記アクチュエータを含んで構成されることを特徴とする請求項1記載の車両。
【請求項3】
減速度を指示する減速度指示手段と、
前記減速度指示手段により指示された減速度に応じて、前記車輪のトウ角及び前記車輪の車体に対する相対的位置に関する指令値を決定する制動指令値決定手段と、を備え、
前記制動手段は、前記制動指令値決定手段により決定された指令値に基づいて、前記車輪のトウ角を付与すると共に、前記車輪の位置を前記車体に対して相対的に進行方向へ移動させて制動することを特徴とする請求項1又は2に記載の車両。
【請求項4】
前記車体の傾斜量を調整する車体傾斜量調整装置と、
前記制動指令値決定手段により決定された指令値に応じて、前記車体の傾斜量に対応する傾斜角指令値を決定する傾斜角指令値決定手段と、
その傾斜角指令値決定手段により決定された傾斜角指令値に基づいて、前記車体傾斜量調整装置を作動させ、前記車体の傾斜量を調整する制動補助手段と、
を備えていることを特徴とする請求項3記載の車両。
【図1】



【図2】

【図3】
【図4】
【図5】

【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−247149(P2008−247149A)
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願番号】特願2007−89847(P2007−89847)
【出願日】平成19年3月29日(2007.3.29)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
【公開日】平成20年10月16日(2008.10.16)
【国際特許分類】
【出願日】平成19年3月29日(2007.3.29)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
[ Back to top ]