
車両
【課題】旋回安定性を十分に高くすることができるようにする。
【解決手段】乗員によって操作される操舵部材と、車両のフレーム部材の所定の箇所に配設され、内周面に沿って第1の係合部68が形成された固定部材58と、該固定部材の径方向内方において回動自在に配設され、前記操舵部材の操作に伴って回動させられる回動部材59と、該回動部材の外周縁に配設され、回動部材の回動を規制するための規制部材64,65とを有する。該規制部材は、回動部材の回動速度を表す操舵速度が閾値より高い場合に、前記第1の係合部と係合させられる第2の係合部を備える。回動部材の回動速度を表す操舵速度が閾値より高い場合に、第1、第2の係合部が係合させられて、回動部材の回動が規制されるので、旋回安定性を高くすることができる。
【解決手段】乗員によって操作される操舵部材と、車両のフレーム部材の所定の箇所に配設され、内周面に沿って第1の係合部68が形成された固定部材58と、該固定部材の径方向内方において回動自在に配設され、前記操舵部材の操作に伴って回動させられる回動部材59と、該回動部材の外周縁に配設され、回動部材の回動を規制するための規制部材64,65とを有する。該規制部材は、回動部材の回動速度を表す操舵速度が閾値より高い場合に、前記第1の係合部と係合させられる第2の係合部を備える。回動部材の回動速度を表す操舵速度が閾値より高い場合に、第1、第2の係合部が係合させられて、回動部材の回動が規制されるので、旋回安定性を高くすることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に関するものである。
【背景技術】
【0002】
従来、車両においては、一般的に、乗員である運転者のほかに、複数の他の乗員を収容することができるようになっているが、運転者だけが車両に乗車することが多く、その場合、エネルギーが無用に消費されてしまう。このことから、例えば、二輪車、三輪車等の1人乗り用の車両が提供されている。
【0003】
ところが、一人乗り用の車両においては、例えば、運転者が乗車するのに伴って重心の位置が高くなり、車両を旋回させるとき、すなわち、旋回時における安定性(以下「旋回安定性」という。)が低くなってしまう。そこで、例えば、二輪車においては、旋回時に運転者が車体を旋回中心側に傾斜させて走行させるようになっている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−155671号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、前記二輪車においては、運転者が走行状態に応じて車体を傾斜させるので、適正な角度だけ傾斜させることが困難であり、運転者が違和感を覚えたり、不安を抱いたりしてしまう。
【0006】
そこで、リンク機構、リンクモータ等を配設し、傾斜制御(姿勢制御)を行うことによって、旋回時に前記リンクモータを駆動し、車両に加わる横加速度に応じてリンク機構を作動させ、車体を傾斜させるようにした車両、例えば、三輪車が考えられる。
【0007】
ところが、傾斜制御を行うことによって車体を傾斜させると、操舵が低速で行われる場合は、操舵部材としてのハンドルバーを操作したときの操舵に追従して車体を傾斜させることができるが、操舵が高速で行われる場合は、操舵に追従して車体を傾斜させることができず、旋回安定性を十分に高くすることができない。
【0008】
本発明は、前記従来の車両の問題点を解決して、旋回安定性を十分に高くすることができる車両を提供することを目的とする。
【課題を解決するための手段】
【0009】
そのために、本発明の車両においては、乗員によって操作される操舵部材と、車両のフレーム部材の所定の箇所に配設され、内周面に沿って第1の係合部が形成された固定部材と、該固定部材の径方向内方において回動自在に配設され、前記操舵部材の操作に伴って回動させられる回動部材と、該回動部材の外周縁に配設され、回動部材の回動を規制するための規制部材とを有する。
【0010】
そして、該規制部材は、回動部材の回動速度を表す操舵速度が閾値より高い場合に、前記第1の係合部と係合させられる第2の係合部を備える。
【発明の効果】
【0011】
本発明によれば、車両においては、乗員によって操作される操舵部材と、車両のフレーム部材の所定の箇所に配設され、内周面に沿って第1の係合部が形成された固定部材と、該固定部材の径方向内方において回動自在に配設され、前記操舵部材の操作に伴って回動させられる回動部材と、該回動部材の外周縁に配設され、回動部材の回動を規制するための規制部材とを有する。
【0012】
そして、該規制部材は、回動部材の回動速度を表す操舵速度が閾値より高い場合に、前記第1の係合部と係合させられる第2の係合部を備える。
【0013】
この場合、回動部材の回動速度を表す操舵速度が閾値より高い場合に、第1、第2の係合部が係合させられて、回動部材の回動が規制されるので、旋回安定性を高くすることができる。
【0014】
また、第1、第2の係合部を係合させるためのアクチュエータを配設する必要がないので、車両のコストを低くすることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施の形態における操舵規制機構を示す図である。
【図2】本発明の第1の実施の形態における三輪車の左側面図である。
【図3】本発明の第1の実施の形態における三輪車の背面図である。
【図4】本発明の第1の実施の形態におけるリンク機構を示す図である。
【図5】本発明の第1の実施の形態における操舵部の概念図である。
【図6】本発明の第1の実施の形態における三輪車の傾斜制御の動作を示すフローチャートである。
【図7】本発明の第1の実施の形態における搭乗・操舵部の要部を示す図である。
【図8】本発明の第1の実施の形態における操舵規制機構の動作を示す第1の図である。
【図9】本発明の第1の実施の形態における操舵規制機構の動作を示す第2の図である。
【図10】本発明の第2の実施の形態における操舵規制機構を示す図である。
【図11】本発明の第2の実施の形態における操舵規制機構の動作を示す第1の図である。
【図12】本発明の第2の実施の形態における操舵規制機構の動作を示す第2の図である。
【図13】本発明の第2の実施の形態における通常位置に置かれたストッパの状態を示す図である。
【図14】本発明の第2の実施の形態におけるストッパとアクチュエータとの連結部を示す図である。
【図15】本発明の第2の実施の形態における規制位置に置かれたストッパの状態を示す第1の図である。
【図16】本発明の第2の実施の形態における規制位置に置かれたストッパの状態を示す第2の図である。
【図17】本発明の第2の実施の形態におけるストッパが規制位置に置かれたときのスイッチの状態を示す第1の図である。
【図18】本発明の第2の実施の形態におけるストッパが規制位置に置かれたときのスイッチの状態を示す第2の図である。
【図19】本発明の第2の実施の形態における制御部の動作を示すフローチャートである。
【図20】本発明の第3の実施の形態における制御部の動作を示すフローチャートである。
【図21】本発明の第4の実施の形態における制御部の動作を示すフローチャートである。
【図22】本発明の第5の実施の形態における制御部の動作を示すフローチャートである。
【図23】本発明の第6の実施の形態における制御部の動作を示すフローチャートである。
【図24】本発明の第7の実施の形態における制御部の動作を示すフローチャートである。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。この場合、車両としての三輪車について説明する。
【0017】
図2は本発明の第1の実施の形態における三輪車の左側面図、図3は本発明の第1の実施の形態における三輪車の背面図、図4は本発明の第1の実施の形態におけるリンク機構を示す図、図5は本発明の第1の実施の形態における操舵部の概念図である。
【0018】
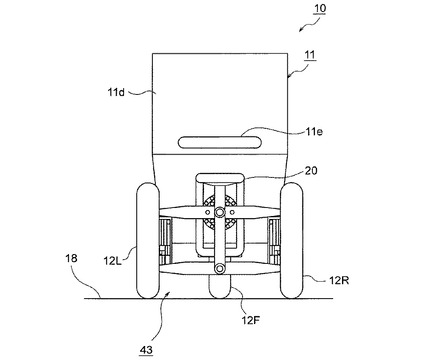
図において、10は三輪車であり、該三輪車10は、車両本体Bd、及び該車両本体Bdに対して回転自在に配設された複数の、すなわち、三つの車輪12F、12L、12Rを備える。
【0019】
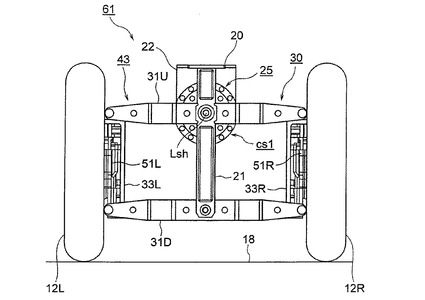
また、前記車両本体Bdは、乗員である運転者が搭乗するための搭乗部11、該搭乗部11と車輪12Fとを連結する操舵輪支持部材としての前輪フォーク17、前記搭乗部11より後方に配設された車両駆動部としての支持部20、前記搭乗部11より前方に配設され、運転者が三輪車10を操縦するための操縦装置41、前記支持部20の下方に配設され、三輪車10の所定の傾斜部位、本実施の形態においては、三輪車10の全体、すなわち、車体を路面18に対して左右に傾斜(リーン)させるための車両傾斜装置43等を備える。なお、前記搭乗部11と支持部20とは、搭乗部11のほぼ中央及び支持部20の前端において、連結部24を介して連結される。
【0020】
また、前記支持部20、車両傾斜装置43、車輪12L、12R等によって本体部61が、車輪12F、前輪フォーク17、操縦装置41等によって、三輪車10を操舵するための操舵部62が、該操舵部62及び搭乗部11によって搭乗・操舵部63が構成される。
【0021】
前記車輪12Fは、車両本体Bdの前側における所定の位置、本実施の形態においては、三輪車10の幅方向における中央に、前記前輪フォーク17に対して回転自在に配設され、前輪として、かつ、操舵用の車輪(操舵輪)として機能する。なお、前記車輪12Fの車軸に、車輪12Fの回転速度に基づいて車速vを検出する車速検出部としての車速センサ54が配設される。
【0022】
また、車輪12L、12Rは、車両本体Bdの後側における所定の位置、本実施の形態においては、三輪車10の幅方向における左右の両端に、前記支持部20に対して回転自在に配設され、後輪として、かつ、走行用の車輪(駆動輪)として機能する。そのために、前記車輪12L、12Rには、それぞれ、三輪車10を走行させるための走行用の駆動部としての駆動モータ51L、51Rが配設され、該駆動モータ51L、51Rを駆動することによって車輪12L、12Rを回転させることができるようになっている。前記駆動モータ51L、51Rは、それぞれ車輪12L、12R内に収容され、インホイールモータを構成する。
【0023】
本実施の形態において、前記駆動モータ51L、51Rとしては、速度制御、トルク制御等が可能なサーボモータが使用されるが、他の種類のモータを使用することができる。また、本実施の形態においては、駆動モータ51L、51Rがそれぞれ車輪12L、12R内に収容されるようになっているが、駆動モータを、車輪12Fに配設したり、各車輪12F、12L、12Rに配設したりすることができる。さらに、駆動モータを車両本体Bdの所定の箇所に配設し、駆動モータと車輪12Fとを連結したり、駆動モータと車輪12L、12Rとを連結したり、駆動モータと車輪12F、12L、12Rとを連結したりすることができる。
【0024】
さらに、本実施の形態においては、車両本体Bdの前側に一つの車輪12Fが、車両本体Bdの後側に二つの車輪12L、12Rが配設されるようになっているが、車両本体Bdの前側に二つの車輪を、車両本体Bdの後側に一つの車輪を配設することができる。また、車両が二輪車である場合は、車両本体の左右の両端に車輪が配設され、車両が四輪車である場合は、車両本体の前側及び後側の左右の両端に車輪が配設される。
【0025】
前記搭乗部11は、運転者が着座するための部位である座席11a、該座席11aより前方に配設され、運転者の足を置くための部位である搭乗部本体としての、かつ、床部材としてのフットレスト11b、該フットレスト11bの前端から立ち上げて形成され、風よけ部を構成するフレーム部材11c、前記座席11aの後端から上方に向けて立ち上げて形成された背もたれ部11d、及び該背もたれ部11dの背面から後方に向けて水平に延在させて配設された荷台11eを備える。なお、本実施の形態において、三輪車10は一人乗り用とされ、搭乗部11に運転者だけが搭乗することができるようになっているが、搭乗部11に運転者及び他の乗員を搭乗させたり、搭乗部11の後方の車輪12L、12Rの上に、荷台11eに代えて補助搭乗部を形成し、該補助搭乗部に他の乗員を搭乗させたりすることができる。
【0026】
また、前記前輪フォーク17は、例えば、付勢部材としてのスプリングが内蔵されたテレスコピックタイプのフォークであり、サスペンション装置(懸架装置)の一部を構成する。なお、該サスペンション装置は、例えば、一般的なオートバイ、自転車等の二輪車において使用される前輪用のサスペンション装置と同様の構造を有する。
【0027】
そして、前記操縦装置41は、三輪車10の進行方向を変えたり、三輪車10を旋回させたりするための第1の操作部としての、かつ、操舵部材としてのハンドルバー41a、速度メータ、インジケータ等の表示要素としての図示されないメータ類、始動スイッチ、ボタン等の操作要素としての図示されないスイッチ類等を備える。なお、前記ハンドルバー41aに代えて、第1の操作部としての、かつ、操舵部材としてのステアリングホイール、ジョグダイヤル、タッチパネル、押しボタン等を配設することができる。
【0028】
また、図5に示されるように、ハンドルバー41aと前輪フォーク17とが操舵軸部材42によって連結され、該操舵軸部材42は、上端が下端より後方に位置するように傾斜させられた状態で、ハンドルバー41a及び前輪フォーク17と共に前記フレーム部材11cに対して回動自在(回転自在)に支持される。したがって、運転者が前記ハンドルバー41aを操作して回動させると、前輪フォーク17及び車輪12Fは、前記ハンドルバー41aの回動に応じて所定の舵角で回動させられ、三輪車10の進行方向を変える。
【0029】
そして、前記操舵軸部材42には、操舵軸部材42の前記フレーム部材11cに対する回動量を、ハンドルバー41aの操舵量(操作量)を表す操舵角βとして検出する操舵量検出部としての、かつ、舵角検出部としての操舵軸エンコーダ46が配設される。なお、前記操舵角βは、操舵軸部材42の回転角度であり、運転者が三輪車10に対して要求する要求旋回量を表す。
【0030】
また、前記操舵軸部材42における操舵軸エンコーダ46の上方には、ハンドルバー41aから操舵軸部材42に入力される捩(ねじ)りモーメントとしての第1のトルクを検出するための第1のトルク検出部としての、かつ、第1のトルクセンサとしてのハンドル側トルクセンサ47が配設され、前記操舵軸部材42における操舵軸エンコーダ46の下方には、車輪12Fから操舵軸部材42に入力される第2のトルクを検出するための第2のトルク検出部としての、かつ、第2のトルクセンサとしての操舵輪側トルクセンサ48が配設される。
【0031】
前記ハンドル側トルクセンサ47及び操舵輪側トルクセンサ48は、例えば、磁気の変化を非接触で検出するトルクセンサから成り、本実施の形態においては、一般的な乗用車等の車両のパワーステアリング装置に採用されるトルクセンサと同様のものが使用されるが、微小なトルクの変化を検出することができるものであれば、他のトルクセンサを使用することができる。
【0032】
なお、前記ハンドルバー41aには、三輪車10を加速(発進も含む。)させるための第2の操作部としての、かつ、加速操作部材としての図示されないアクセルグリップ、及び三輪車10を減速(制動も含む。)させるための第3の操作部としての、かつ、第1の減速操作部材としての図示されないブレーキレバーが配設される。
【0033】
したがって、運転者は、前記ハンドルバー41a、アクセルグリップ、ブレーキレバー等を操作して、所定の走行条件(例えば、進行方向、旋回方向、旋回半径、走行速度等)で三輪車10を走行させることができる。
【0034】
また、前記操縦装置41には、前記アクセルグリップの操作量である加速操作量としてのアクセル操作値θを検出する加速操作量検出部としての図示されないアクセルセンサ、前記ブレーキレバー等の操作量である減速操作量を検出する減速操作量検出部としての図示されないブレーキセンサ等が配設される。
【0035】
そして、前記車両傾斜装置43は、車輪12L、12Rを支持する支持機構としての、かつ、車体を傾斜させるための車両傾斜機構としてのリンク機構30、及び該リンク機構30を作動させ、車体を傾斜させるためのアクチュエータとしての、かつ、傾斜用の駆動部としてのリンクモータ25を備える。本実施の形態において、該リンクモータ25としては、速度制御、トルク制御等が可能なサーボモータが使用されるが、他の種類のモータを使用することもできる。
【0036】
前記リンク機構30は、車輪12Lの内側(三輪車10の中央側)において、上下方向に延在させて配設され、駆動モータ51Lを支持する左側の縦リンクユニット33L、車輪12Rの内側において、上下方向に延在させて配設され、駆動モータ51Rを支持する右側の縦リンクユニット33R、前記縦リンクユニット33L、33Rの各上端部に対して相対的に回動自在に連結された上側の横リンクユニット31U、前記縦リンクユニット33L、33Rの各下端部に対して相対的に回動自在に連結された下側の横リンクユニット31D、及び上下方向に延在させて配設され、上端が前記支持部20に対して回動不能に固定され、横リンクユニット31U、31Dの中央部に対して相対的に回動自在に連結された中央縦部材21を備える。
【0037】
前記駆動モータ51L、51Rは、それぞれ、固定部材としての図示されないケース、該ケースに取り付けられた図示されないステータ、該ステータに対して回動自在に配設された図示されないロータ、及び該ロータに取り付けられた図示されない出力軸を備え、前記各ケースがそれぞれ縦リンクユニット33L、33Rに固定され、各出力軸が車輪12L、12Rの軸に連結される。
【0038】
また、前記リンクモータ25は、前記支持部20から下方に垂下させて配設された支持プレート22を介して支持部20に固定され、固定部材としてのケースcs1、該ケースcs1に取り付けられた図示されないステータ、該ステータに対して回動自在に配設された図示されないロータ、及び該ロータに取り付けられた出力軸Lshを備える。そして、前記ケースcs1が支持プレート22を介して支持部20及び中央縦部材21に対して回動不能に固定され、出力軸Lshが前記横リンクユニット31Uに対して回動不能に固定される。なお、前記出力軸Lshは、中央縦部材21と横リンクユニット31Uとを回動自在に連結する連結軸と同一軸上に配設される。
【0039】
したがって、リンクモータ25を駆動して出力軸Lshをケースcs1に対して所定の角度だけ回動させると、横リンクユニット31Uが、支持部20及び中央縦部材21に対して前記所定の角度だけ回動させられ、その結果、リンク機構30が作動して屈曲させられ、車体は前記所定の角度だけ傾斜させられる。これに伴って、車輪12F、12L、12Rは、路面18に対して鉛直な状態を表す鉛直状態から前記所定の角度だけ傾斜させられ、キャンバが付与された状態になる。
【0040】
また、前記リンクモータ25は、出力軸Lshをケースcs1に対して任意の角度で回動不能に固定するための図示されないロック機構を備える。該ロック機構は、電磁ブレーキ等の機構から成る。なお、ロック機構によって出力軸Lshがケースcs1に対して回動不能に固定されている間、リンクモータ25において電力は消費されない。
【0041】
本実施の形態においては、ケースcs1が支持部20及び中央縦部材21に対して回動不能に固定され、出力軸Lshが前記横リンクユニット31Uに対して回動不能に固定されるが、ケースcs1を前記横リンクユニット31Uに対して回動不能に固定し、出力軸Lshを支持部20及び中央縦部材21に対して回動不能に固定することができる。
【0042】
前記車両本体Bdには、搭乗部11の後方若しくは下方又は支持部20に、駆動モータ51L、51R及びリンクモータ25のエネルギー供給源である図示されないバッテリ装置、及び図示されない制御部が配設される。
【0043】
本実施の形態において、該制御部は、コンピュータとして機能し、前記リンクモータ25、操縦装置41、駆動モータ51L、51R等と接続されるとともに、車速センサ54、操舵軸エンコーダ46、ハンドル側トルクセンサ47、操舵輪側トルクセンサ48、車体の傾斜角度を検出する図示されない傾斜角度センサ等の各種のセンサと接続されて、コンピュータシステムとしての車体制御システムを構成する。
【0044】
次に、前記構成の三輪車10における傾斜制御の動作について説明する。
【0045】
図6は本発明の第1の実施の形態における三輪車の傾斜制御の動作を示すフローチャートである。
【0046】
この場合、傾斜制御は、三輪車10の電源が投入されている間、制御部の傾斜制御処理手段によって、繰り返し(例えば、0.2〔ms〕制御周期で)行われる。
【0047】
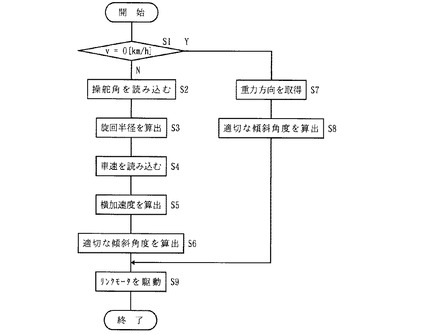
まず、前記傾斜制御処理手段の停止判断処理手段は、停止判断処理を行い、車速vを読み込み、三輪車10が停止している(v=0〔km/h〕である)かどうかを判断する(ステップS1)。そして、三輪車10が停止していない(走行している)場合、前記傾斜制御処理手段の操舵量取得処理手段は、操舵量取得処理を行い、操舵角βを読み込むことによって取得する(ステップS2)。
【0048】
続いて、前記傾斜制御処理手段の旋回半径算出処理手段は、旋回半径算出処理を行い、操舵角βに基づいて車輪12Fの舵角αを算出し、該舵角α、及び車輪12Fと車輪12L、12Rとの軸距離(ホイールベース)Lに基づいて三輪車10の旋回半径R
R=L/sinα
を算出する(ステップS3)。なお、前記操舵角βと車輪12Fの舵角αとは比例する。
【0049】
次に、前記傾斜制御処理手段の横加速度算出処理手段は、横加速度算出処理を行い、車速vを読み込み(ステップS4)、横加速度gL
gL=M・v2 /R
を算出する(ステップS5)。なお、値Mは三輪車10の質量(乗員及び搭載物の質量も含む。)を表す。
【0050】
続いて、前記傾斜制御処理手段の傾斜角度算出処理手段は、傾斜角度算出処理を行い、前記横加速度gLに応じた適切な傾斜角度εを算出する(ステップS6)。そのために、前記傾斜角度算出処理手段は、前記横加速度gLと重力加速度Gとを合成し、合成によって得られる接地荷重の作用点を、車輪12Lと路面18との接地点と、車輪12Rと路面18との接地点との中心に位置させるように傾斜角度εを算出する。
【0051】
次に、前記傾斜制御処理手段の車体傾斜処理手段は、車体傾斜処理を行い、前記傾斜角度εに基づいて、リンクモータ25を駆動し、リンク機構30を作動させ、車体を傾斜させる(ステップS9)。
【0052】
また、三輪車10が停止している場合、前記傾斜角度算出処理手段は、図示されない加速度センサ、ジャイロセンサ等のセンサによって重力方向を取得し(ステップS7)、該重力方向に応じて適切な傾斜角度εを算出する(ステップS8)。そして、前記傾斜制御処理手段の車体傾斜処理手段は、前記傾斜角度εに基づいて、リンクモータ25を駆動し、リンク機構30を作動させ、車体を傾斜させる(ステップS9)。
【0053】
このようにして、三輪車10の旋回時に、旋回中心側に向けて適切な傾斜角度εだけ車体を傾斜させることができるので、三輪車10の重心位置が旋回内輪側(三輪車10を左側に向けて旋回させる場合には車輪12L側であり、三輪車10を右側に向けて旋回させる場合には車輪12R側である。)に移動し、三輪車10の重量の多くを旋回内輪に作用させ、該旋回内輪の接地荷重を大きくすることができる。したがって、三輪車10に発生する遠心力に対する対抗力を大きくすることができるので、旋回内輪の浮き上がりを防止することができ、旋回安定性を高くすることができる。
【0054】
また、車輪12L、12Rを旋回中心側に向けて傾斜させることができるので、各車輪12L、12Rのタイヤに横力によるキャンバスラストを発生させることができる。したがって、旋回安定性を一層高くすることができる。
【0055】
さらに、搭乗部11を旋回中心側に向けて傾斜させることができるので、運転者及び他の乗員を座席11aに押し付ける方向の力成分を大きくすることができる。したがって、運転者及び他の乗員に遠心力を体感させにくくすることができるので、運転者及び他の乗員が違和感を覚えたり、不安を抱いたりするのを防止することができる。
【0056】
ところで、運転者がハンドルバー41aを操作して三輪車10を旋回させようとしたときに、操舵が低速で行われる場合は、操舵に追従して車体を傾斜させることができるが、操舵が高速で行われる場合は、操舵に追従して車体を傾斜させることができないと、三輪車10の旋回安定性を十分に高くすることができない。
【0057】
そこで、本実施の形態においては、運転者がハンドルバー41aを操作したときの操舵軸部材42の回転速度、すなわち、操舵角βの変化率を表す操舵速度ωに基づいて操舵軸部材42の回動を規制し、操舵軸部材42を停止させるための操舵規制機構が配設され、該操舵規制機構を作動させることによって、操舵を規制することができる。なお、前記操舵速度ωによって車両の状態及びハンドルバー41aの操作状態が表される。
【0058】
図1は本発明の第1の実施の形態における操舵規制機構を示す図、図7は本発明の第1の実施の形態における搭乗・操舵部の要部を示す図、図8は本発明の第1の実施の形態における操舵規制機構の動作を示す第1の図、図9は本発明の第1の実施の形態における操舵規制機構の動作を示す第2の図である。
【0059】
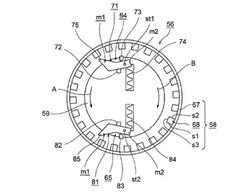
図7において、11cはフレーム部材、12Fは車輪、17は前輪フォーク、55は前記フレーム部材11cにおける操舵軸部材42を支持する部分、すなわち、軸支持部、56は該軸支持部55の軸方向における所定の位置、本実施の形態においては、上端部に形成された操舵規制機構である。
【0060】
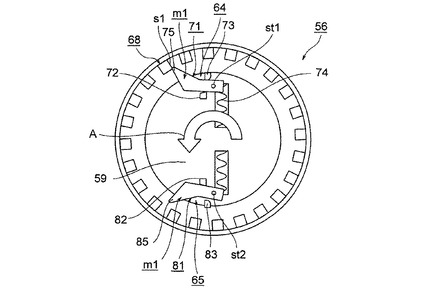
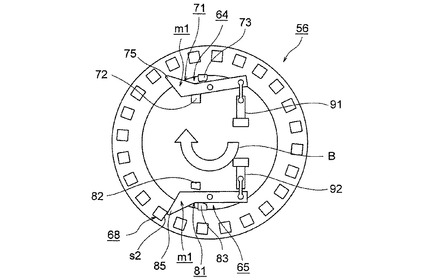
図1に示されるように、前記操舵規制機構56は、固定部材としてのステータ58、該ステータ58の径方向内方において回動自在に配設され、ハンドルバー41aの操作に伴って回動させられる回動部材としてのロータ59、及び該ロータ59の外周縁に配設され、ロータ59の回動を規制することによって、操舵軸部材42の回動を規制するための第1、第2の規制部材64、65を備える。
【0061】
前記ステータ58は、筒状の形状を有し、軸支持部55の上端部の径を大きくすることによって形成された筐(きょう)体部67、及び該筐体部67の内周面から径方向内方に向けて突出させて、かつ、筐体部67の内周面に沿って所定のピッチで形成された第1の係合部としての複数の歯68を備える。該各歯68は、所定の形状、本実施の形態においては、四角形の形状を有し、筐体部67の内周面から立ち上げて、ロータ59を左方向に回動させたときの回転方向における上流側に形成された第1の面s1、ロータ59を左方向に回動させたときの回転方向における下流側に形成された第2の面s2、及び前記第1の面s1の先端と第2の面s2の先端とを結ぶ第3の面s3(頂面)から成る。
【0062】
また、前記ロータ59は、円柱状の形状を有し、前記操舵軸部材42におけるステータ58と対向する部分に形成され、三輪車10を左方向に旋回させるために左方向への操舵が行われると、第1の回動方向、本実施の形態においては、矢印A方向(ロータ59を上方から見たときに左方向)に回動させられ、三輪車10を右方向に旋回させるために右方向への操舵が行われると、第2の回動方向、本実施の形態においては、矢印B方向(ロータ59を上方から見たときに右方向)に回動させられる。なお、ロータ59の外周面は、ステータ58とロータ59とが干渉するのを防止するために、前記各歯68の第3の面s3より径方向内方に位置させられる。
【0063】
そして、前記第1、第2の規制部材64、65は、ロータ59の円周方向における複数箇所、本実施の形態においては、2箇所に、互いに180〔°〕の角度だけ隔てて配設され、左方向及び右方向への操舵が低速で行われる場合、操舵軸部材42の回動を規制せず、左方向への操舵が高速で行われる場合、第1の規制部材64が操舵軸部材42の回動を規制し、右方向への操舵が高速で行われる場合、第2の規制部材65が操舵軸部材42の回動を規制する。
【0064】
そのために、前記第1の規制部材64は、前記ロータ59の外周縁の近傍において、支持軸st1を揺動中心としてロータ59によって揺動自在に支持され、ロータ59の回動に伴って揺動させられ、前記各歯68と選択的に係合させられる揺動部材としての、かつ、第2の係合部としてのストッパ71、矢印A方向における支持軸st1より下流側に、前記ロータ59の径方向において互いに所定の間隔を置いて配設され、ストッパ71の揺動角度を規定する一対の位置決め部材72、73、及び矢印A方向における支持軸st1より上流側に配設され、前記ストッパ71を、操舵が規制されない位置、すなわち、通常位置に置くように付勢する位置設定部としての、かつ、付勢部材としてのスプリング74を備える。
【0065】
前記ストッパ71は、矢印A方向における支持軸st1より下流側に向けて延在させて形成された第1のアーム部m1、及び矢印A方向における支持軸st1より上流側に向けて延在させて形成された第2のアーム部m2を備え、前記第1のアーム部m1の先端に、前記歯68とストッパ71とを係合させるための係合突部としての係合突起75が形成される。
【0066】
そして、前記スプリング74は、一端がロータ59に、他端が第2のアーム部m2の先端に固定され、第2のアーム部m2をロータ59の径方向外方に向けて付勢し、操舵速度ωが、スプリング74の付勢力によって決まる所定の閾値以下である場合、図1に示されるように、スプリング74の付勢力によって第1のアーム部m1が位置決め部材72に当接させられ、ストッパ71が通常位置に置かれる。
【0067】
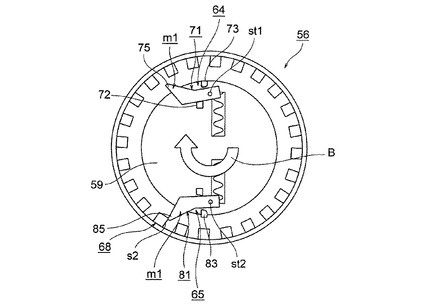
また、前記第2の規制部材65は、前記ロータ59の外周縁の近傍において、支持軸st2を揺動中心としてロータ59によって揺動自在に支持され、ロータ59の回動に伴って揺動させられ、前記各歯68と選択的に係合させられる揺動部材としての、かつ、第2の係合部としてのストッパ81、矢印B方向における支持軸st2より下流側に、前記ロータ59の径方向において互いに所定の間隔を置いて配設され、ストッパ81の揺動角度を規定する一対の位置決め部材82、83、及び矢印B方向における支持軸st2より上流側に配設され、前記ストッパ81を通常位置に置くように付勢する位置設定部としての、かつ、付勢部材としてのスプリング84を備える。
【0068】
前記ストッパ81は、矢印B方向における支持軸st2より下流側に向けて延在させて形成された第1のアーム部m1、及び矢印B方向における支持軸st2より上流側に向けて延在させて形成された第2のアーム部m2を備え、前記第1のアーム部m1の先端に、前記歯68とストッパ81とを係合させるための係合突部としての係合突起85が形成される。
【0069】
そして、前記スプリング84は、一端がロータ59に、他端が第2のアーム部m2の先端に固定され、第2のアーム部m2をロータ59の径方向外方に向けて付勢し、操舵速度ωが、スプリング84の付勢力によって決まる所定の閾値以下である場合、図1に示されるように、スプリング84の付勢力によって第1のアーム部m1が位置決め部材82に当接させられ、ストッパ81が通常位置に置かれる。
【0070】
ところで、本実施の形態においては、前記第1、第2の規制部材64、65において、前記第1のアーム部m1の質量が第2のアーム部m2の質量より大きくされ、矢印A方向における支持軸st1より下流側にストッパ71の重心が、矢印B方向における支持軸st2より下流側にストッパ81の重心が置かれる。
【0071】
したがって、前記操舵速度ωが前記所定の閾値より高い場合、ロータ59が矢印A方向に回動させられると、図8に示されるように、支持軸st1より下流側に重心が置かれたストッパ71は、支持軸st1を中心として、重心がロータ59の径方向外方に移動するように回動させられ、第1のアーム部m1を位置決め部材73に当接させて、操舵が規制される位置、すなわち、規制位置に置かれる。その結果、係合突起75が歯68の第1の面s1に当接させられ、ストッパ71と歯68とが係合させられる。このようにして、操舵軸部材42の矢印A方向の回動が規制される。
【0072】
このとき、ストッパ81は、重心が矢印A方向における支持軸st2より上流側に置かれるので、重心がロータ59の径方向外方に移動するように回動させられることはなく、第1のアーム部m1を位置決め部材82に当接させたまま通常位置に置かれる。したがって、ストッパ81と歯68とが係合させられない。
【0073】
また、前記操舵速度ωが前記所定の閾値より高い場合、ロータ59が矢印B方向に回動させられると、図9に示されるように、支持軸st2より下流側に重心が置かれたストッパ81は、支持軸st2を中心として、重心がロータ59の径方向外方に移動するように回動させられ、第1のアーム部m1を位置決め部材83に当接させて規制位置に置かれる。その結果、係合突起85が歯68の第2の面s2に当接させられ、ストッパ81と歯68とが係合させられる。このようにして、操舵軸部材42の矢印B方向の回動が規制される。
【0074】
このとき、ストッパ71は、重心が矢印B方向における支持軸st1より上流側に置かれるので、重心がロータ59の径方向外方に移動するように回動させられることはなく、第1のアーム部m1を位置決め部材72に当接させたまま通常位置に置かれる。したがって、ストッパ71と歯68とが係合させられない。
【0075】
このように、本実施の形態においては、操舵が高速で行われる場合に、操舵軸部材42の回動が規制され、操舵角βが、操舵軸部材42の回動が規制されたときの値より大きくならないので、ハンドルバー41aを操作したときの三輪車10の旋回安定性を高くすることができる。また、傾斜制御において、操舵に追従して車体を傾斜させることができるので、運転者及び他の乗員が違和感を覚えるのを防止することができる。
【0076】
また、操舵規制機構56が軸支持部55に配設されるので、操舵規制機構56の構造を簡素化することができる。したがって、三輪車10を小型化することができる。
【0077】
そして、ロータ59が回動させられるのに伴って、ストッパ71、81が通常位置及び規制位置に選択的に置かれるので、ストッパ71、81を通常位置及び規制位置に置くためのアクチュエータを配設する必要がない。したがって、操舵規制機構56の構造を簡素化することができるだけでなく、三輪車10のコストを低くすることができる。
【0078】
次に、前記第2の規制部材65を制御部によって作動させることができるようにした本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0079】
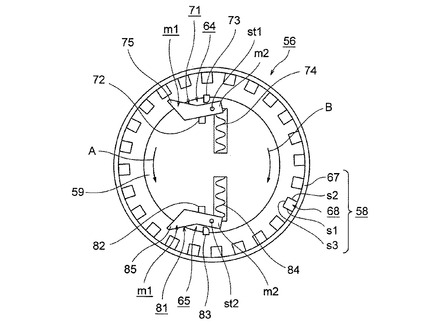
図10は本発明の第2の実施の形態における操舵規制機構を示す図、図11は本発明の第2の実施の形態における操舵規制機構の動作を示す第1の図、図12は本発明の第2の実施の形態における操舵規制機構の動作を示す第2の図、図13は本発明の第2の実施の形態における通常位置に置かれたストッパの状態を示す図、図14は本発明の第2の実施の形態におけるストッパとアクチュエータとの連結部を示す図、図15は本発明の第2の実施の形態における規制位置に置かれたストッパの状態を示す第1の図、図16は本発明の第2の実施の形態における規制位置に置かれたストッパの状態を示す第2の図、図17は本発明の第2の実施の形態におけるストッパが規制位置に置かれたときのスイッチの状態を示す第1の図、図18は本発明の第2の実施の形態におけるストッパが規制位置に置かれたときのスイッチの状態を示す第2の図である。
【0080】
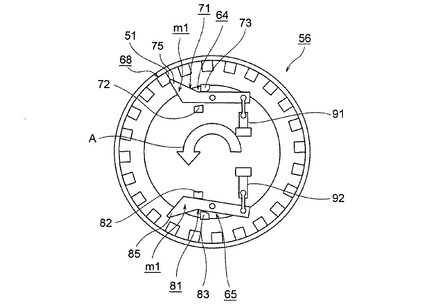
この場合、固定部材としての前記ステータ58及び回動部材としてのロータ59のうちの一方、本実施の形態においては、ロータ59に第1、第2の規制部材64、65が配設される。
【0081】
該第1、第2の規制部材64、65は、ロータ59の円周方向における複数箇所、本実施の形態においては、2箇所に、互いに180〔°〕の角度だけ隔てて配設され、左方向及び右方向への操舵が低速で行われる場合、ロータ59の回動を規制せず、左方向への操舵が高速で行われる場合、第1の規制部材64がロータ59の回動を規制し、右方向への操舵が高速で行われる場合、第2の規制部材64がロータ59の回動を規制する。
【0082】
そのために、前記第1の規制部材64は、前記ロータ59の外周縁の近傍に、支持軸st1を揺動中心として揺動自在に支持された揺動部材としての、かつ、第2の係合部としてのストッパ71、矢印A方向における支持軸st1より下流側に、前記ロータ59の径方向において互いに所定の間隔を置いて配設され、ストッパ71の揺動角度を規定する一対の位置決め部材72、73、及び矢印A方向における支持軸st1より上流側に配設され、前記ストッパ71の位置を設定し、通常位置及び規制位置に置くための位置設定部としてのアクチュエータ91を備える。
【0083】
前記ストッパ71は、矢印A方向における支持軸st1より下流側に向けて延在させて形成された第1のアーム部m1、及び矢印A方向における支持軸st1より上流側に向けて延在させて形成された第2のアーム部m2を備え、前記第1のアーム部m1の先端に、第1の係合部としての歯68とストッパ71とを係合させるための係合突部としての係合突起75が形成される。
【0084】
そして、前記アクチュエータ91は、第2のアーム部m2をロータ59の径方向外方及び径方向内方に向けて移動させ、図11に示されるように、第1のアーム部m1を位置決め部材72、73に選択的に当接させ、ストッパ71を通常位置及び規制位置に選択的に置く。このようにして、操舵軸部材42の矢印A方向の回動が規制される。
【0085】
また、前記第2の規制部材65は、前記ロータ59の外周縁の近傍に、支持軸st2を揺動中心として揺動自在に支持された第2の係合部としてのストッパ81、矢印B方向における支持軸st2より下流側に、前記ロータ59の径方向において互いに所定の間隔を置いて配設され、ストッパ81の揺動角度を規定する一対の位置決め部材82、83、及び矢印B方向における支持軸st2より上流側に配設され、前記ストッパ81を通常位置及び規制位置に置くための位置設定部としてのアクチュエータ92を備える。
【0086】
前記ストッパ81は、矢印B方向における支持軸st2より下流側に向けて延在させて形成された第1のアーム部m1、及び矢印B方向における支持軸st2より上流側に向けて延在させて形成された第2のアーム部m2を備え、前記第1のアーム部m1の先端に、前記歯68とストッパ81とを係合させるための係合突部としての係合突起85が形成される。
【0087】
そして、前記アクチュエータ92は、第2のアーム部m2をロータ59の径方向外方及び径方向内方に向けて移動させ、図12に示されるように、第1のアーム部m1を位置決め部材82、83に選択的に当接させ、ストッパ81を通常位置及び規制位置に選択的に置く。このようにして、操舵軸部材42の矢印B方向の回動が規制される。
【0088】
次に、図13〜18に基づいて、前記アクチュエータ91、92について説明する。この場合、アクチュエータ91、92の構造は同じであるので、アクチュエータ91についてだけ説明する。
【0089】
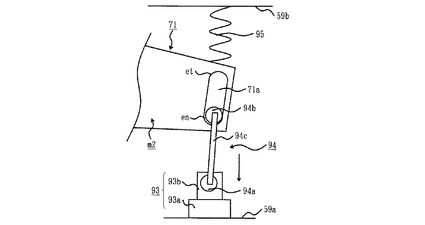
前記アクチュエータ91は、ロータ59の所定の部位に形成された固定部59aに取り付けられた位置設定用の駆動部としてのソレノイド93、該ソレノイド93とストッパ71の第2のアーム部m2の先端とを連結する連結要素94、及び前記ストッパ71を通常位置に置くように第2のアーム部m2をロータ59の径方向外方に向けて付勢する付勢部材としてのスプリング95を備える。
【0090】
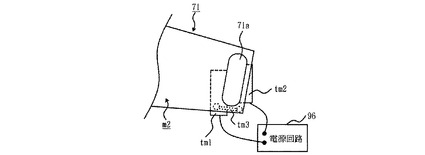
前記ソレノイド93は、コイル部93a及び進退要素としてのプランジャ93bを備え、前記コイル部93aに図示されないコイルが配設される。また、前記連結要素94は、プランジャ93bの先端において、プランジャ93bによって回動自在に支持された第1の連結部94a、第2のアーム部m2の先端に、連結要素94の進退方向に沿って形成された長溝71a内において回動自在に、かつ、進退自在(摺動自在)に配設された第2の連結部94b、及び前記第1の連結部94aの両端と第2の連結部94bの両端とを連結する一対の第3の連結部94cを備える。そして、前記スプリング95は、一端がロータ59の所定の部位に形成された固定部59bに、他端が第2のアーム部m2の先端に固定される。なお、前記スプリング95のばね定数は、ロータ59が回動させられたときに、第1のアーム部m1に発生する遠心力によって、第2のアーム部m2がロータ59の径方向内方側に移動させられないように設定される。
【0091】
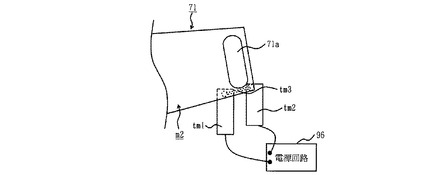
また、ロータ59におけるストッパ71と対向する面には、一対の電極tm1、tm2が、ストッパ71における第2のアーム部m2の裏面には電極tm3が形成され、前記電極tm1、tm2に電源回路96が接続される。なお、電極tm1〜tm3は導電性の高い材料、本実施の形態においては、銅板によって形成される。
【0092】
そして、前記コイルに電流が供給(通電)されず、アクチュエータ91がオフにされると、図13に示されるように、プランジャ93bが前進位置に置かれ、連結要素94も前進位置に置かれる。そして、第2のアーム部m2はスプリング95の付勢力によってロータ59の径方向外方側に移動させられ、ストッパ71は通常位置に置かれ、第2の連結部94bは、前記長溝71aのロータ59における径方向内方側の端部enに置かれる。このとき、電極tm1〜tm3は、図17に示されるように接続され、前記コイルに電流を供給することができる状態になる。
【0093】
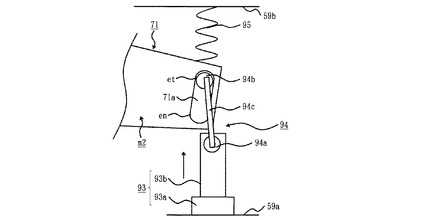
また、前記コイルに電流が供給され、アクチュエータ91がオンにされると、図15に示されるように、プランジャ93bが後退位置に置かれ、連結要素94も後退位置に置かれる。そして、第2のアーム部m2がスプリング95の付勢力に抗してロータ59の径方向内方側に移動させられ、ストッパ71は、第1のアーム部m1を位置決め部材73に当接させて規制位置に置かれ、第2の連結部94bは、そのまま前記長溝71aの端部enに置かれる。
【0094】
このとき、図18に示されるように電極tm2、tm3間が遮(しゃ)断され、前記コイルへの電流の供給が停止させられ、前記アクチュエータ91がオフにされる。そして、プランジャ93bは、図16に示されるように前進位置に置かれ、連結要素94も前進位置に置かれるが、係合突起75と歯68との間に発生する摩擦力によって、係合突起75と歯68とは係合させられた状態を維持し、ストッパ71は規制位置に置かれたままになる。したがって、第2の連結部94bは、前記長溝71aのロータ59における径方向外方側の端部etに置かれる。
【0095】
なお、運転者が第1の操作部としての、かつ、操舵部材としてのハンドルバー41aを操作して反対の方向(操舵を戻す方向)に回動させると、ロータ59が反対の方向に回動させられ、係合突起75と歯68との係合が解除される。したがって、スプリング95の付勢力によって第2のアーム部m2がロータ59の径方向外方側に移動させられ、ストッパ71は通常位置に置かれる。そして、第2の連結部94bは、前記長溝71aのロータ59における径方向内方側の端部enに置かれる。
【0096】
ところで、本実施の形態においては、操舵速度ωが所定の閾値a以下である場合、アクチュエータ91、92においてソレノイド93がオフにされる。その場合、図10に示されるように、ストッパ71は第1のアーム部m1を位置決め部材72に当接させて通常位置に置かれ、ストッパ81は第1のアーム部m1を位置決め部材82に当接させて通常位置に置かれる。したがって、ストッパ71、81と歯68とが係合させられない。
【0097】
また、操舵速度ωが所定の閾値aより高い場合、ロータ59が矢印A方向に回動させられると、アクチュエータ91がオンにされ、アクチュエータ92がオフにされる。その場合、図11に示されるように、ストッパ71は第1のアーム部m1を位置決め部材73に当接させて規制位置に置かれ、ストッパ81は第1のアーム部m1を位置決め部材82に当接させて通常位置に置かれる。
【0098】
したがって、係合突起75が歯68の第1の面s1に当接させられ、ストッパ71と歯68とが係合させられる。このようにして、操舵軸部材42の矢印A方向の回動が規制される。
【0099】
そして、操舵速度ωが所定の閾値aより高い場合、ロータ59が矢印B方向に回動させられると、アクチュエータ91がオフにされ、アクチュエータ92がオンにされる。その場合、図12に示されるように、ストッパ71は第1のアーム部m1を位置決め部材72に当接させて通常位置に置かれ、ストッパ81は第1のアーム部m1を位置決め部材83に当接させて規制位置に置かれる。
【0100】
したがって、係合突起85が歯68の第2の面s2に当接させられ、ストッパ81と歯68とが係合させられる。このようにして、操舵軸部材42の矢印B方向の回動が規制される。
【0101】
次に、前記操舵規制機構56を作動させる際の前記制御部の動作について説明する。
【0102】
図19は本発明の第2の実施の形態における制御部の動作を示すフローチャートである。
【0103】
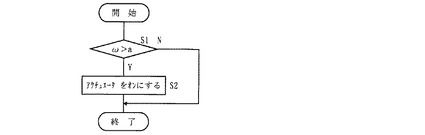
三輪車10の旋回時に、運転者がハンドルバー41aを操作して所定の方向に回動させ、操舵を行うと、前記制御部の車両状態判断処理手段としての、かつ、操作状態判断処理手段としての操舵速度判断処理手段は、車両状態判断処理としての、かつ、操作状態判断処理としての操舵速度判断処理を行い、操舵角βを読み込み、該操舵角βを微分することによって、操舵速度ωを算出(取得)し、該操舵速度ωが閾値aより高いかどうかを判断する(ステップS1)。
【0104】
そして、操舵速度ωが閾値aより高い場合、前記制御部の操舵規制処理手段は、操舵規制処理を行い、アクチュエータ91、92の一方をオンにして(ステップS2)、ストッパ71、81の一方を規制位置に置き、ストッパ71又はストッパ81と歯68とを係合させ、操舵軸部材42の回動を規制する。したがって、それ以上、操舵軸部材42が回動させられることはなく、操舵角βは、操舵軸部材42の回動が規制されたときの値に維持される。
【0105】
このように、本実施の形態においては、操舵が高速で行われる場合に、操舵軸部材42の回動が規制され、操舵角βが、操舵軸部材42の回動が規制されたときの値より大きくならないので、傾斜制御において操舵に追従して車体を傾斜させることができるようになる。したがって、運転者及び他の乗員が違和感を覚えるのを防止することができる。
【0106】
また、操舵速度ωが閾値aより高いかどうかによって、アクチュエータ91、92がオン・オフさせられ、ストッパ71、81が通常位置又は規制位置に置かれるので、ストッパ71、81を確実に通常位置及び規制位置に置くことができる。
【0107】
そして、ロータ59に電極tm1、tm2が、ストッパ71に電極tm3が形成され、ストッパ71、81が通常位置に置かれると、電極tm1〜tm3が接続され、前記コイルに電流を供給することができる状態になり、ストッパ71、81が規制位置に置かれると、電極tm2、tm3間が遮断され、前記コイルへの電流の供給が停止させられるので、ストッパ71、81の位置を検出するためのセンサを配設する必要がない。したがって、三輪車10のコストを低くすることができる。
【0108】
ところで、三輪車10に発生する横加速度gLが小さい場合は、仮に、操舵軸部材42の回動が規制されなくても、旋回安定性が低くなることはない。
【0109】
そこで、三輪車10に発生する横加速度gLが小さい場合に、操舵軸部材42の回動を規制しないようにすることができる。その場合、制御部の横加速度判断処理手段は、横加速度判断処理を行い、横加速度gLが閾値gLth以下であるかどうかを判断し、横加速度gLが閾値gLthより大きい場合、制御部の操舵規制処理手段は、操舵軸部材42の回動を規制し、横加速度gLが閾値gLth以下である場合、操舵規制処理手段は操舵軸部材42の回動を規制しない。したがって、操舵軸部材42の回動を規制する頻度を少なくすることができる。
【0110】
また、本実施の形態においては、操舵速度ωが閾値aより高い場合に、操舵軸部材42の回動が規制されるようになっているが、三輪車10の車速vが低い場合には、仮に、操舵軸部材42の回動が規制されなくても、旋回安定性が低くなることはない。
【0111】
そこで、車速vに対応させて操舵速度ωの閾値aを設定し、例えば、車速vが閾値vth以下である場合に、閾値aを大きくしてa1(>a)にすることができる。
【0112】
その場合、制御部の車速判断処理手段は、車速判断処理を行い、車速vが閾値vthより高いかどうかを判断し、車速vが閾値vthより高い場合に、制御部の閾値変更処理手段は、閾値変更処理を行い、閾値aを変更してa1にする。そして、前記操舵速度判断処理手段は、操舵速度ωが閾値a1より高いかどうかを判断する。したがって、操舵軸部材42の回動を規制する頻度を少なくすることができる。
【0113】
さらに、本実施の形態においては、操舵速度ωが閾値aより高い場合に、操舵軸部材42の回動が規制されるようになっているが、三輪車10に加わる横加速度gLが小さい場合には、仮に、操舵軸部材42の回動が規制されなくても、旋回安定性が低くなることはない。
【0114】
そこで、横加速度gLに対応させて操舵速度ωの閾値aを設定し、例えば、横加速度gLが閾値gLth以下である場合に、閾値aを大きくしてa1(>a)にすることができる。
【0115】
その場合、前記横加速度判断処理手段は、横加速度gLが閾値gLth以下であるかどうかを判断し、横加速度gLが閾値gLth以下である場合に、前記閾値変更処理手段は、閾値aを変更してa1にする。そして、前記操舵速度判断処理手段は、操舵速度ωが閾値a1より高いかどうかを判断する。したがって、操舵軸部材42の回動を規制する頻度を少なくすることができる。
【0116】
ところで、車速vが低い場合に、操舵速度ωに関係なく、操舵軸部材42の回動を規制しないようにすることができる。そこで、三輪車10の車速vが低い場合には、操舵軸部材42の回動を規制しないようにした本発明の第3の実施の形態について説明する。なお、第1、第2の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0117】
図20は本発明の第3の実施の形態における制御部の動作を示すフローチャートである。
【0118】
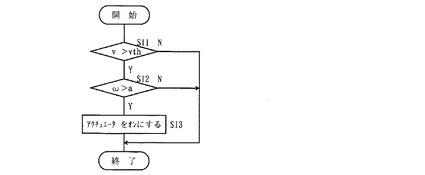
この場合、制御部の前記車速判断処理手段は、車速vが閾値vthより高いかどうかを判断し(ステップS11)、車速vが閾値vthより高い場合、前記操舵速度判断処理手段は、操舵角βを読み込み、該操舵角βを微分することによって操舵速度ωを算出し、該操舵速度ωが閾値aより高いかどうかを判断する(ステップS12)。
【0119】
そして、操舵速度ωが閾値aより高い場合、前記操舵規制処理手段は、位置設定部としてのアクチュエータ91、92の一方をオンにして(ステップS13)、揺動部材としての、かつ、第2の係合部としてのストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制する。
【0120】
この場合、車速vが閾値vth以下である場合に操舵軸部材42の回動が規制されないので、操舵軸部材42の回動を規制する頻度を少なくすることができる。したがって、例えば、三輪車10を駐車させる場合等において、低速で、かつ、素早い動作が必要になる場合に、操舵速度ωが高くても、操舵軸部材42の回動が規制されないので、第1の操作部としての、かつ、操舵部材としてのハンドルバー41aの操作性を高くすることができ、三輪車10を迅速に、かつ、確実に駐車させることができる。
【0121】
ところで、三輪車10を走行させているときに、路面18(図2)の凹凸によって車輪12Fに外力が加わり、車輪12Fが左方又は右方に振られることがある。その場合、操舵軸支持部材としての前輪フォーク17を介して操舵軸部材42に回動が伝達されるが、操舵軸部材42の回転角度が、操舵量検出部としての、かつ、舵角検出部としての操舵軸エンコーダ46によって操舵角βとして検出されるので、前記操舵速度判断処理において、操舵軸部材42の回転角度の変化率が操舵速度ωとして算出されることになり、操舵速度ωが閾値aより大きいと、前記操舵規制処理において操舵軸部材42の回動が規制されてしまう。
【0122】
そこで、車輪12Fに外力が加わったときに、操舵軸部材42の回動を規制しないようにした本発明の第4の実施の形態について説明する。なお、第1、第2の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0123】
図21は本発明の第4の実施の形態における制御部の動作を示すフローチャートである。
【0124】
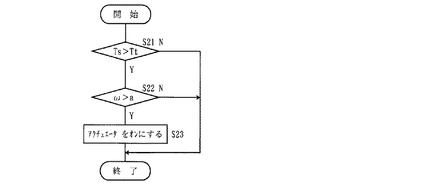
この場合、前記制御部の外力判断処理手段は、外力判断処理を行い、第1のトルク検出部としての、かつ、第1のトルクセンサとしてのハンドル側トルクセンサ47によって検出された、第1の操作部としての、かつ、操舵部材としてのハンドルバー41aから操舵軸部材42(回動部材としてのロータ59)に入力される第1のトルクTs、及び第2のトルク検出部としての、かつ、第2のトルクセンサとしての操舵輪側トルクセンサ48によって検出された、車輪12Fから操舵軸部材42に入力される第2のトルクTtを読み込んで取得し、第1のトルクTsが第2のトルクTtより大きいかどうかを判断する(ステップS21)。
【0125】
そして、第1のトルクTsが第2のトルクTtより大きい場合、前記操舵速度判断処理手段は、操舵角βを読み込み、該操舵角βを微分することによって操舵速度ωを算出し、該操舵速度ωが閾値aより高いかどうかを判断し(ステップS22)、操舵速度ωが閾値a以下である場合、制御部は処理を終了する。
【0126】
また、操舵速度ωが閾値aより高い場合、前記操舵規制処理手段は、位置設定部としてのアクチュエータ91、92の一方をオンにして(ステップS23)、揺動部材としての、かつ、第2の係合部としてのストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制する。
【0127】
この場合、路面18の凹凸によって車輪12Fに外力が加わり、車輪12Fが左方又は右方に振られると、第1のトルクTsが第2のトルクTt以下になり、制御部は処理を終了するので、前記操舵規制処理において操舵軸部材42の回動が規制されることがない。したがって、操舵軸部材42の回動を規制する頻度を少なくすることができる。
【0128】
ところで、操舵規制処理において操舵軸部材42の回動が規制されると、通常、運転者はハンドルバー41aを元に戻すが、仮に、ハンドルバー41aを元に戻すことなく、三輪車10を走行し続けると、旋回安定性が低くなることがある。
【0129】
そこで、操舵規制処理において操舵軸部材42の回動が規制された後に、ハンドルバー41aが操作されていない場合に、旋回安定性が低くなるのを抑制するようにした本発明の第5の実施の形態について説明する。なお、第1〜第4の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0130】
図22は本発明の第5の実施の形態における制御部の動作を示すフローチャートである。
【0131】
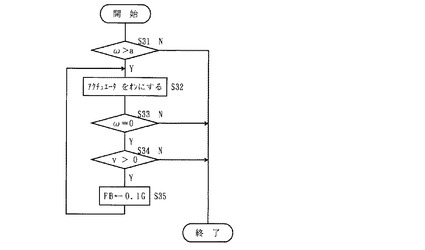
この場合、前記操舵速度判断処理手段は、操舵角βを読み込み、該操舵角βを微分することによって操舵速度ωを算出し、操舵速度ωが閾値aより高いかどうかを判断する(ステップS31)。操舵速度ωが閾値aより高い場合、前記操舵規制処理手段は、位置設定部としてのアクチュエータ91、92の一方をオンにして(ステップS32)、揺動部材としての、かつ、第2の係合部としてのストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制する。
【0132】
そして、操舵軸部材42の回動が規制されると、前記操舵速度判断処理手段は、操舵速度ωが0(零)であるかどうかを判断し(ステップS33)、操舵速度ωが0である場合、前記車速判断処理手段は、三輪車10が走行しているかどうかを、車速vが0より高いかどうかによって判断し(ステップS34)、車速vが0より高い場合に、制御部の制動処理手段は、制動処理を行い、三輪車10の制動力(減速加速度)FBを所定の値、本実施の形態においては、0.1Gにセットし、三輪車10を0.1Gで制動する(ステップS35)。なお、Gは重力加速度である。
【0133】
そのために、前記制動処理手段は、車速vを読み込み、該車速vの変化率を表す減速度を算出し、減速度が0.1Gになるように走行用の駆動部としての駆動モータ51L、51Rを回生によって駆動する。なお、回生によって発生させられた電力はバッテリ装置に送られる。
【0134】
この場合、操舵規制処理において操舵軸部材42の回動が規制された後に、ハンドルバー41aが操作されないまま三輪車10が走行させられている場合に、三輪車10を制動させることができるので、旋回安定性が低くなるのを防止することができる。
【0135】
また、アクチュエータ91、92にフェールが発生したり、第1の係合部としての歯68と、係合突部としての係合突起75、85とが噛み込んで、係合を解除することができなくなったりしたときでも、三輪車10を制動させることができるので、旋回安定性が低くなるのを防止することができる。
【0136】
次に、本発明の第6の実施の形態について説明する。
【0137】
図23は本発明の第6の実施の形態における制御部の動作を示すフローチャートである。
【0138】
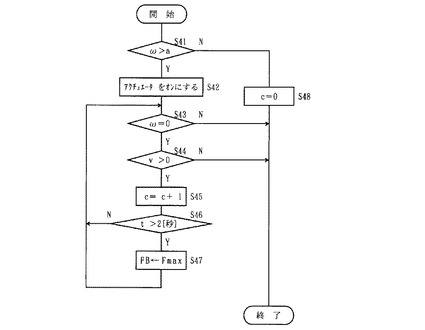
この場合、前記操舵速度判断処理手段は、操舵角βを読み込み、該操舵角βを微分することによって操舵速度ωを算出し、操舵速度ωが閾値aより高いかどうかを判断する(ステップS41)。操舵速度ωが閾値aより高い場合、前記操舵規制処理手段は、位置設定部としてのアクチュエータ91、92の一方をオンにして(ステップS42)、揺動部材としての、かつ、第2の係合部としてのストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制する。
【0139】
そして、操舵軸部材42の回動が規制されると、前記操舵速度判断処理手段は、操舵速度ωが0であるかどうかを判断し(ステップS43)、操舵速度ωが0である場合、前記車速判断処理手段は、三輪車10が走行しているかどうかを、車速vが0より高いかどうかによって判断し(ステップS44)、車速vが0より高い場合に、制御部の経過時間判断処理手段は、経過時間判断処理を行い、図示されないタイマのカウント値cをインクリメントし(ステップS45)、車速vが0より高いと判断されてから経過した時間、すなわち、経過時間tが、所定の時間、本実施の形態においては、2〔秒〕より大きいかどうかを判断する(ステップS46)。
【0140】
経過時間tが2〔秒〕より大きい場合、前記制動処理手段は、三輪車10の制動力(減速加速度)FBを最大値Fmaxにセットし(ステップS47)、三輪車10を最大値Fmaxで制動する。なお、前記操舵速度判断処理において、操舵速度ωが閾値a以下である場合、前記経過時間判断処理手段はタイマのカウント値cを0にする。
【0141】
この場合、操舵規制処理において操舵軸部材42の回動が規制された後に、操舵部材としてのハンドルバー41aが操作されないまま三輪車10が走行させられている場合に、三輪車10を停止させることができるので、旋回安定性が低くなるのを防止することができる。
【0142】
また、アクチュエータ91、92にフェールが発生したり、第1の係合部としての歯68と、係合突部としての係合突起75、85とが噛み込んで、係合を解除することができなくなったりしたときでも、三輪車10を停止させることができるので、旋回安定性が低くなるのを防止することができる。
【0143】
ところで、前記第4の実施の形態においては、外力判断処理において、車輪12Fから操舵軸部材42に入力される第2のトルクTtが、ハンドルバー41aから操舵軸部材42に入力される第1のトルクTsより大きい場合に、操舵軸部材42の回動が規制されないようになっているが、走行環境によっては旋回安定性が低くなってしまうことがある。例えば、運転者が一定の操舵角βでハンドルバー41aを操作しているときに、路面18の凹凸によって車輪12Fに大きな外力が加わり、車輪12Fが左方又は右方に大きく振られると、旋回安定性が低くなってしまう。
【0144】
そこで、運転者が一定の操舵角βでハンドルバー41aを操作しているときに、走行環境に応じて操舵軸部材42の回動を規制することができるようにした本発明の第7の実施の形態について説明する。なお、第1〜第6の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0145】
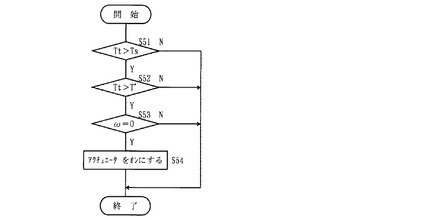
図24は本発明の第7の実施の形態における制御部の動作を示すフローチャートである。
【0146】
ここでは、走行環境が路面18の凹凸である場合を例にとって説明する。すなわち、路面18の凹凸によって車輪12Fに大きな外力が加わった場合を例にとって説明する。
【0147】
この場合、前記制御部の外力判断処理手段は、第1の操作部としての、かつ、操舵部材としてのハンドルバー41aから操舵軸部材42に入力される第1のトルクTs、及び車輪12Fから操舵軸部材42に入力される第2のトルクTtを読み込み、第2のトルクTtが第1のトルクTsより大きいかどうかを判断し(ステップS51)、第2のトルクTtが第1のトルクTsより大きい場合、第2のトルクTtが、絶対値であらかじめ十分に大きく設定された閾値T’より大きいかどうかを判断する(ステップS52)。
【0148】
そして、第2のトルクTtが閾値T’より大きい場合、前記操舵速度判断処理手段は、操舵角βを読み込み、該操舵角βを微分することによって操舵速度ωを算出し、該操舵速度ωが0であるかどうかを判断し(ステップS53)、操舵速度ωが0である場合、前記操舵規制処理手段は、位置設定部としてのアクチュエータ91、92の一方をオンにして(ステップS54)、揺動部材としての、かつ、第2の係合部としてのストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制する。
【0149】
この場合、運転者が一定の操舵角βでハンドルバー41aを操作しているときに、路面18の凹凸によって車輪12Fに大きな外力が加わった場合に、操舵軸部材42の回動が規制されるので、旋回安定性が低くなるのを防止することができる。
【0150】
なお、旋回安定性に影響を及ぼす走行環境としては、路面18の凹凸に加えて、路面18の幅方向の傾斜、路面18の幅方向の段差等が考えられる。例えば、道路を走行中に、その区間だけ路面18が幅方向に傾斜している短い区間や、幅方向の段差が存在している短い区間を通過した場合、車体が傾斜した方向に車輪12Fが振られるので、旋回安定性が低くなってしまう。
【0151】
このような場合には、車体に図示されない横加速度センサを配設し、該横加速度センサによって検出された横加速度に応じて操舵軸部材42の回動を規制することにより、旋回安定性が低くなるのを防止することができる。
【0152】
具体的には、一般的な加速度センサ、ジャイロセンサ等から成る横加速度センサを、例えば、搭乗部11の背面等に配設し、前記横加速度センサによって検出された横加速度が所定の閾値より大きい場合に、操舵規制処理手段がアクチュエータ91、92の一方をオンにして、ストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制するようにする。これにより、路面18の幅方向の傾斜、路面18の幅方向の段差等によって車体が傾斜した場合に、操舵軸部材42の回動を適切に規制することができ、旋回安定性が低くなるのを防止することができる。
【0153】
次に、本発明にける他の態様について説明する。
【0154】
第1の態様において、
車両状態判断処理手段は、操舵速度を取得し、操舵速度が閾値より高いかどうかを判断する操舵速度判断処理手段であり、
操舵規制処理手段は、操舵速度が閾値より高い場合に、第2の係合部を第1の係合部と係合させ、回動部材の回動を規制する。
【0155】
また、第2の態様において、
第2の係合部は、固定部材に対して揺動自在に配設されて、第1の係合部と係合させられない通常位置、及び第1の係合部と係合させられる規制位置と採り、
操舵規制処理手段は、操舵速度が閾値以下である場合に、第2の係合部を通常位置に置き、操舵速度が閾値より高い場合に、第2の係合部を規制位置に置く。
【0156】
そして、第3の態様においては、
回動部材に第1、第2の規制部材が配設され、
第1の規制部材は、回動部材が左方向に回動させられるときに規制位置に置かれ、回動部材が右方向に回動させられるときに通常位置に置かれ、
第2の規制部材は、回動部材が左方向に回動させられるときに通常位置に置かれ、回動部材が右方向に回動させられるときに規制位置に置かれる。
【0157】
また、第4の態様において、
第2の係合部は、所定の支持軸を揺動中心にして回動部材によって揺動自在に支持され、
回動部材の回動方向における支持軸より下流側に、第2の係合部を第1の係合部と係合させるための係合突起が形成される。
【0158】
そして、第5の態様において、
回動部材は、操舵部材と、車両の前輪を支持する前輪フォークとを連結する操舵軸部材に形成される。
【0159】
また、第6の態様においては、
車速が閾値より高いかどうかを判断する車速判断処理手段と、
車速が閾値より高い場合に、操舵速度の閾値を大きくする閾値変更処理手段とを有する。
【0160】
そして、第7の態様においては、
横加速度が閾値以下であるかどうかを判断する横加速度判断処理手段と、
横加速度が閾値より大きい場合に、操舵速度の閾値を大きくする閾値変更処理手段とを有する。
【0161】
なお、本発明は前記各実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【符号の説明】
【0162】
10 三輪車
11c フレーム部材
41a ハンドルバー
58 ステータ
59 ロータ
64、65 第1、第2の規制部材
68 歯
71、81 ストッパ
【技術分野】
【0001】
本発明は、車両に関するものである。
【背景技術】
【0002】
従来、車両においては、一般的に、乗員である運転者のほかに、複数の他の乗員を収容することができるようになっているが、運転者だけが車両に乗車することが多く、その場合、エネルギーが無用に消費されてしまう。このことから、例えば、二輪車、三輪車等の1人乗り用の車両が提供されている。
【0003】
ところが、一人乗り用の車両においては、例えば、運転者が乗車するのに伴って重心の位置が高くなり、車両を旋回させるとき、すなわち、旋回時における安定性(以下「旋回安定性」という。)が低くなってしまう。そこで、例えば、二輪車においては、旋回時に運転者が車体を旋回中心側に傾斜させて走行させるようになっている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−155671号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、前記二輪車においては、運転者が走行状態に応じて車体を傾斜させるので、適正な角度だけ傾斜させることが困難であり、運転者が違和感を覚えたり、不安を抱いたりしてしまう。
【0006】
そこで、リンク機構、リンクモータ等を配設し、傾斜制御(姿勢制御)を行うことによって、旋回時に前記リンクモータを駆動し、車両に加わる横加速度に応じてリンク機構を作動させ、車体を傾斜させるようにした車両、例えば、三輪車が考えられる。
【0007】
ところが、傾斜制御を行うことによって車体を傾斜させると、操舵が低速で行われる場合は、操舵部材としてのハンドルバーを操作したときの操舵に追従して車体を傾斜させることができるが、操舵が高速で行われる場合は、操舵に追従して車体を傾斜させることができず、旋回安定性を十分に高くすることができない。
【0008】
本発明は、前記従来の車両の問題点を解決して、旋回安定性を十分に高くすることができる車両を提供することを目的とする。
【課題を解決するための手段】
【0009】
そのために、本発明の車両においては、乗員によって操作される操舵部材と、車両のフレーム部材の所定の箇所に配設され、内周面に沿って第1の係合部が形成された固定部材と、該固定部材の径方向内方において回動自在に配設され、前記操舵部材の操作に伴って回動させられる回動部材と、該回動部材の外周縁に配設され、回動部材の回動を規制するための規制部材とを有する。
【0010】
そして、該規制部材は、回動部材の回動速度を表す操舵速度が閾値より高い場合に、前記第1の係合部と係合させられる第2の係合部を備える。
【発明の効果】
【0011】
本発明によれば、車両においては、乗員によって操作される操舵部材と、車両のフレーム部材の所定の箇所に配設され、内周面に沿って第1の係合部が形成された固定部材と、該固定部材の径方向内方において回動自在に配設され、前記操舵部材の操作に伴って回動させられる回動部材と、該回動部材の外周縁に配設され、回動部材の回動を規制するための規制部材とを有する。
【0012】
そして、該規制部材は、回動部材の回動速度を表す操舵速度が閾値より高い場合に、前記第1の係合部と係合させられる第2の係合部を備える。
【0013】
この場合、回動部材の回動速度を表す操舵速度が閾値より高い場合に、第1、第2の係合部が係合させられて、回動部材の回動が規制されるので、旋回安定性を高くすることができる。
【0014】
また、第1、第2の係合部を係合させるためのアクチュエータを配設する必要がないので、車両のコストを低くすることができる。
【図面の簡単な説明】
【0015】
【図1】本発明の第1の実施の形態における操舵規制機構を示す図である。
【図2】本発明の第1の実施の形態における三輪車の左側面図である。
【図3】本発明の第1の実施の形態における三輪車の背面図である。
【図4】本発明の第1の実施の形態におけるリンク機構を示す図である。
【図5】本発明の第1の実施の形態における操舵部の概念図である。
【図6】本発明の第1の実施の形態における三輪車の傾斜制御の動作を示すフローチャートである。
【図7】本発明の第1の実施の形態における搭乗・操舵部の要部を示す図である。
【図8】本発明の第1の実施の形態における操舵規制機構の動作を示す第1の図である。
【図9】本発明の第1の実施の形態における操舵規制機構の動作を示す第2の図である。
【図10】本発明の第2の実施の形態における操舵規制機構を示す図である。
【図11】本発明の第2の実施の形態における操舵規制機構の動作を示す第1の図である。
【図12】本発明の第2の実施の形態における操舵規制機構の動作を示す第2の図である。
【図13】本発明の第2の実施の形態における通常位置に置かれたストッパの状態を示す図である。
【図14】本発明の第2の実施の形態におけるストッパとアクチュエータとの連結部を示す図である。
【図15】本発明の第2の実施の形態における規制位置に置かれたストッパの状態を示す第1の図である。
【図16】本発明の第2の実施の形態における規制位置に置かれたストッパの状態を示す第2の図である。
【図17】本発明の第2の実施の形態におけるストッパが規制位置に置かれたときのスイッチの状態を示す第1の図である。
【図18】本発明の第2の実施の形態におけるストッパが規制位置に置かれたときのスイッチの状態を示す第2の図である。
【図19】本発明の第2の実施の形態における制御部の動作を示すフローチャートである。
【図20】本発明の第3の実施の形態における制御部の動作を示すフローチャートである。
【図21】本発明の第4の実施の形態における制御部の動作を示すフローチャートである。
【図22】本発明の第5の実施の形態における制御部の動作を示すフローチャートである。
【図23】本発明の第6の実施の形態における制御部の動作を示すフローチャートである。
【図24】本発明の第7の実施の形態における制御部の動作を示すフローチャートである。
【発明を実施するための形態】
【0016】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。この場合、車両としての三輪車について説明する。
【0017】
図2は本発明の第1の実施の形態における三輪車の左側面図、図3は本発明の第1の実施の形態における三輪車の背面図、図4は本発明の第1の実施の形態におけるリンク機構を示す図、図5は本発明の第1の実施の形態における操舵部の概念図である。
【0018】
図において、10は三輪車であり、該三輪車10は、車両本体Bd、及び該車両本体Bdに対して回転自在に配設された複数の、すなわち、三つの車輪12F、12L、12Rを備える。
【0019】
また、前記車両本体Bdは、乗員である運転者が搭乗するための搭乗部11、該搭乗部11と車輪12Fとを連結する操舵輪支持部材としての前輪フォーク17、前記搭乗部11より後方に配設された車両駆動部としての支持部20、前記搭乗部11より前方に配設され、運転者が三輪車10を操縦するための操縦装置41、前記支持部20の下方に配設され、三輪車10の所定の傾斜部位、本実施の形態においては、三輪車10の全体、すなわち、車体を路面18に対して左右に傾斜(リーン)させるための車両傾斜装置43等を備える。なお、前記搭乗部11と支持部20とは、搭乗部11のほぼ中央及び支持部20の前端において、連結部24を介して連結される。
【0020】
また、前記支持部20、車両傾斜装置43、車輪12L、12R等によって本体部61が、車輪12F、前輪フォーク17、操縦装置41等によって、三輪車10を操舵するための操舵部62が、該操舵部62及び搭乗部11によって搭乗・操舵部63が構成される。
【0021】
前記車輪12Fは、車両本体Bdの前側における所定の位置、本実施の形態においては、三輪車10の幅方向における中央に、前記前輪フォーク17に対して回転自在に配設され、前輪として、かつ、操舵用の車輪(操舵輪)として機能する。なお、前記車輪12Fの車軸に、車輪12Fの回転速度に基づいて車速vを検出する車速検出部としての車速センサ54が配設される。
【0022】
また、車輪12L、12Rは、車両本体Bdの後側における所定の位置、本実施の形態においては、三輪車10の幅方向における左右の両端に、前記支持部20に対して回転自在に配設され、後輪として、かつ、走行用の車輪(駆動輪)として機能する。そのために、前記車輪12L、12Rには、それぞれ、三輪車10を走行させるための走行用の駆動部としての駆動モータ51L、51Rが配設され、該駆動モータ51L、51Rを駆動することによって車輪12L、12Rを回転させることができるようになっている。前記駆動モータ51L、51Rは、それぞれ車輪12L、12R内に収容され、インホイールモータを構成する。
【0023】
本実施の形態において、前記駆動モータ51L、51Rとしては、速度制御、トルク制御等が可能なサーボモータが使用されるが、他の種類のモータを使用することができる。また、本実施の形態においては、駆動モータ51L、51Rがそれぞれ車輪12L、12R内に収容されるようになっているが、駆動モータを、車輪12Fに配設したり、各車輪12F、12L、12Rに配設したりすることができる。さらに、駆動モータを車両本体Bdの所定の箇所に配設し、駆動モータと車輪12Fとを連結したり、駆動モータと車輪12L、12Rとを連結したり、駆動モータと車輪12F、12L、12Rとを連結したりすることができる。
【0024】
さらに、本実施の形態においては、車両本体Bdの前側に一つの車輪12Fが、車両本体Bdの後側に二つの車輪12L、12Rが配設されるようになっているが、車両本体Bdの前側に二つの車輪を、車両本体Bdの後側に一つの車輪を配設することができる。また、車両が二輪車である場合は、車両本体の左右の両端に車輪が配設され、車両が四輪車である場合は、車両本体の前側及び後側の左右の両端に車輪が配設される。
【0025】
前記搭乗部11は、運転者が着座するための部位である座席11a、該座席11aより前方に配設され、運転者の足を置くための部位である搭乗部本体としての、かつ、床部材としてのフットレスト11b、該フットレスト11bの前端から立ち上げて形成され、風よけ部を構成するフレーム部材11c、前記座席11aの後端から上方に向けて立ち上げて形成された背もたれ部11d、及び該背もたれ部11dの背面から後方に向けて水平に延在させて配設された荷台11eを備える。なお、本実施の形態において、三輪車10は一人乗り用とされ、搭乗部11に運転者だけが搭乗することができるようになっているが、搭乗部11に運転者及び他の乗員を搭乗させたり、搭乗部11の後方の車輪12L、12Rの上に、荷台11eに代えて補助搭乗部を形成し、該補助搭乗部に他の乗員を搭乗させたりすることができる。
【0026】
また、前記前輪フォーク17は、例えば、付勢部材としてのスプリングが内蔵されたテレスコピックタイプのフォークであり、サスペンション装置(懸架装置)の一部を構成する。なお、該サスペンション装置は、例えば、一般的なオートバイ、自転車等の二輪車において使用される前輪用のサスペンション装置と同様の構造を有する。
【0027】
そして、前記操縦装置41は、三輪車10の進行方向を変えたり、三輪車10を旋回させたりするための第1の操作部としての、かつ、操舵部材としてのハンドルバー41a、速度メータ、インジケータ等の表示要素としての図示されないメータ類、始動スイッチ、ボタン等の操作要素としての図示されないスイッチ類等を備える。なお、前記ハンドルバー41aに代えて、第1の操作部としての、かつ、操舵部材としてのステアリングホイール、ジョグダイヤル、タッチパネル、押しボタン等を配設することができる。
【0028】
また、図5に示されるように、ハンドルバー41aと前輪フォーク17とが操舵軸部材42によって連結され、該操舵軸部材42は、上端が下端より後方に位置するように傾斜させられた状態で、ハンドルバー41a及び前輪フォーク17と共に前記フレーム部材11cに対して回動自在(回転自在)に支持される。したがって、運転者が前記ハンドルバー41aを操作して回動させると、前輪フォーク17及び車輪12Fは、前記ハンドルバー41aの回動に応じて所定の舵角で回動させられ、三輪車10の進行方向を変える。
【0029】
そして、前記操舵軸部材42には、操舵軸部材42の前記フレーム部材11cに対する回動量を、ハンドルバー41aの操舵量(操作量)を表す操舵角βとして検出する操舵量検出部としての、かつ、舵角検出部としての操舵軸エンコーダ46が配設される。なお、前記操舵角βは、操舵軸部材42の回転角度であり、運転者が三輪車10に対して要求する要求旋回量を表す。
【0030】
また、前記操舵軸部材42における操舵軸エンコーダ46の上方には、ハンドルバー41aから操舵軸部材42に入力される捩(ねじ)りモーメントとしての第1のトルクを検出するための第1のトルク検出部としての、かつ、第1のトルクセンサとしてのハンドル側トルクセンサ47が配設され、前記操舵軸部材42における操舵軸エンコーダ46の下方には、車輪12Fから操舵軸部材42に入力される第2のトルクを検出するための第2のトルク検出部としての、かつ、第2のトルクセンサとしての操舵輪側トルクセンサ48が配設される。
【0031】
前記ハンドル側トルクセンサ47及び操舵輪側トルクセンサ48は、例えば、磁気の変化を非接触で検出するトルクセンサから成り、本実施の形態においては、一般的な乗用車等の車両のパワーステアリング装置に採用されるトルクセンサと同様のものが使用されるが、微小なトルクの変化を検出することができるものであれば、他のトルクセンサを使用することができる。
【0032】
なお、前記ハンドルバー41aには、三輪車10を加速(発進も含む。)させるための第2の操作部としての、かつ、加速操作部材としての図示されないアクセルグリップ、及び三輪車10を減速(制動も含む。)させるための第3の操作部としての、かつ、第1の減速操作部材としての図示されないブレーキレバーが配設される。
【0033】
したがって、運転者は、前記ハンドルバー41a、アクセルグリップ、ブレーキレバー等を操作して、所定の走行条件(例えば、進行方向、旋回方向、旋回半径、走行速度等)で三輪車10を走行させることができる。
【0034】
また、前記操縦装置41には、前記アクセルグリップの操作量である加速操作量としてのアクセル操作値θを検出する加速操作量検出部としての図示されないアクセルセンサ、前記ブレーキレバー等の操作量である減速操作量を検出する減速操作量検出部としての図示されないブレーキセンサ等が配設される。
【0035】
そして、前記車両傾斜装置43は、車輪12L、12Rを支持する支持機構としての、かつ、車体を傾斜させるための車両傾斜機構としてのリンク機構30、及び該リンク機構30を作動させ、車体を傾斜させるためのアクチュエータとしての、かつ、傾斜用の駆動部としてのリンクモータ25を備える。本実施の形態において、該リンクモータ25としては、速度制御、トルク制御等が可能なサーボモータが使用されるが、他の種類のモータを使用することもできる。
【0036】
前記リンク機構30は、車輪12Lの内側(三輪車10の中央側)において、上下方向に延在させて配設され、駆動モータ51Lを支持する左側の縦リンクユニット33L、車輪12Rの内側において、上下方向に延在させて配設され、駆動モータ51Rを支持する右側の縦リンクユニット33R、前記縦リンクユニット33L、33Rの各上端部に対して相対的に回動自在に連結された上側の横リンクユニット31U、前記縦リンクユニット33L、33Rの各下端部に対して相対的に回動自在に連結された下側の横リンクユニット31D、及び上下方向に延在させて配設され、上端が前記支持部20に対して回動不能に固定され、横リンクユニット31U、31Dの中央部に対して相対的に回動自在に連結された中央縦部材21を備える。
【0037】
前記駆動モータ51L、51Rは、それぞれ、固定部材としての図示されないケース、該ケースに取り付けられた図示されないステータ、該ステータに対して回動自在に配設された図示されないロータ、及び該ロータに取り付けられた図示されない出力軸を備え、前記各ケースがそれぞれ縦リンクユニット33L、33Rに固定され、各出力軸が車輪12L、12Rの軸に連結される。
【0038】
また、前記リンクモータ25は、前記支持部20から下方に垂下させて配設された支持プレート22を介して支持部20に固定され、固定部材としてのケースcs1、該ケースcs1に取り付けられた図示されないステータ、該ステータに対して回動自在に配設された図示されないロータ、及び該ロータに取り付けられた出力軸Lshを備える。そして、前記ケースcs1が支持プレート22を介して支持部20及び中央縦部材21に対して回動不能に固定され、出力軸Lshが前記横リンクユニット31Uに対して回動不能に固定される。なお、前記出力軸Lshは、中央縦部材21と横リンクユニット31Uとを回動自在に連結する連結軸と同一軸上に配設される。
【0039】
したがって、リンクモータ25を駆動して出力軸Lshをケースcs1に対して所定の角度だけ回動させると、横リンクユニット31Uが、支持部20及び中央縦部材21に対して前記所定の角度だけ回動させられ、その結果、リンク機構30が作動して屈曲させられ、車体は前記所定の角度だけ傾斜させられる。これに伴って、車輪12F、12L、12Rは、路面18に対して鉛直な状態を表す鉛直状態から前記所定の角度だけ傾斜させられ、キャンバが付与された状態になる。
【0040】
また、前記リンクモータ25は、出力軸Lshをケースcs1に対して任意の角度で回動不能に固定するための図示されないロック機構を備える。該ロック機構は、電磁ブレーキ等の機構から成る。なお、ロック機構によって出力軸Lshがケースcs1に対して回動不能に固定されている間、リンクモータ25において電力は消費されない。
【0041】
本実施の形態においては、ケースcs1が支持部20及び中央縦部材21に対して回動不能に固定され、出力軸Lshが前記横リンクユニット31Uに対して回動不能に固定されるが、ケースcs1を前記横リンクユニット31Uに対して回動不能に固定し、出力軸Lshを支持部20及び中央縦部材21に対して回動不能に固定することができる。
【0042】
前記車両本体Bdには、搭乗部11の後方若しくは下方又は支持部20に、駆動モータ51L、51R及びリンクモータ25のエネルギー供給源である図示されないバッテリ装置、及び図示されない制御部が配設される。
【0043】
本実施の形態において、該制御部は、コンピュータとして機能し、前記リンクモータ25、操縦装置41、駆動モータ51L、51R等と接続されるとともに、車速センサ54、操舵軸エンコーダ46、ハンドル側トルクセンサ47、操舵輪側トルクセンサ48、車体の傾斜角度を検出する図示されない傾斜角度センサ等の各種のセンサと接続されて、コンピュータシステムとしての車体制御システムを構成する。
【0044】
次に、前記構成の三輪車10における傾斜制御の動作について説明する。
【0045】
図6は本発明の第1の実施の形態における三輪車の傾斜制御の動作を示すフローチャートである。
【0046】
この場合、傾斜制御は、三輪車10の電源が投入されている間、制御部の傾斜制御処理手段によって、繰り返し(例えば、0.2〔ms〕制御周期で)行われる。
【0047】
まず、前記傾斜制御処理手段の停止判断処理手段は、停止判断処理を行い、車速vを読み込み、三輪車10が停止している(v=0〔km/h〕である)かどうかを判断する(ステップS1)。そして、三輪車10が停止していない(走行している)場合、前記傾斜制御処理手段の操舵量取得処理手段は、操舵量取得処理を行い、操舵角βを読み込むことによって取得する(ステップS2)。
【0048】
続いて、前記傾斜制御処理手段の旋回半径算出処理手段は、旋回半径算出処理を行い、操舵角βに基づいて車輪12Fの舵角αを算出し、該舵角α、及び車輪12Fと車輪12L、12Rとの軸距離(ホイールベース)Lに基づいて三輪車10の旋回半径R
R=L/sinα
を算出する(ステップS3)。なお、前記操舵角βと車輪12Fの舵角αとは比例する。
【0049】
次に、前記傾斜制御処理手段の横加速度算出処理手段は、横加速度算出処理を行い、車速vを読み込み(ステップS4)、横加速度gL
gL=M・v2 /R
を算出する(ステップS5)。なお、値Mは三輪車10の質量(乗員及び搭載物の質量も含む。)を表す。
【0050】
続いて、前記傾斜制御処理手段の傾斜角度算出処理手段は、傾斜角度算出処理を行い、前記横加速度gLに応じた適切な傾斜角度εを算出する(ステップS6)。そのために、前記傾斜角度算出処理手段は、前記横加速度gLと重力加速度Gとを合成し、合成によって得られる接地荷重の作用点を、車輪12Lと路面18との接地点と、車輪12Rと路面18との接地点との中心に位置させるように傾斜角度εを算出する。
【0051】
次に、前記傾斜制御処理手段の車体傾斜処理手段は、車体傾斜処理を行い、前記傾斜角度εに基づいて、リンクモータ25を駆動し、リンク機構30を作動させ、車体を傾斜させる(ステップS9)。
【0052】
また、三輪車10が停止している場合、前記傾斜角度算出処理手段は、図示されない加速度センサ、ジャイロセンサ等のセンサによって重力方向を取得し(ステップS7)、該重力方向に応じて適切な傾斜角度εを算出する(ステップS8)。そして、前記傾斜制御処理手段の車体傾斜処理手段は、前記傾斜角度εに基づいて、リンクモータ25を駆動し、リンク機構30を作動させ、車体を傾斜させる(ステップS9)。
【0053】
このようにして、三輪車10の旋回時に、旋回中心側に向けて適切な傾斜角度εだけ車体を傾斜させることができるので、三輪車10の重心位置が旋回内輪側(三輪車10を左側に向けて旋回させる場合には車輪12L側であり、三輪車10を右側に向けて旋回させる場合には車輪12R側である。)に移動し、三輪車10の重量の多くを旋回内輪に作用させ、該旋回内輪の接地荷重を大きくすることができる。したがって、三輪車10に発生する遠心力に対する対抗力を大きくすることができるので、旋回内輪の浮き上がりを防止することができ、旋回安定性を高くすることができる。
【0054】
また、車輪12L、12Rを旋回中心側に向けて傾斜させることができるので、各車輪12L、12Rのタイヤに横力によるキャンバスラストを発生させることができる。したがって、旋回安定性を一層高くすることができる。
【0055】
さらに、搭乗部11を旋回中心側に向けて傾斜させることができるので、運転者及び他の乗員を座席11aに押し付ける方向の力成分を大きくすることができる。したがって、運転者及び他の乗員に遠心力を体感させにくくすることができるので、運転者及び他の乗員が違和感を覚えたり、不安を抱いたりするのを防止することができる。
【0056】
ところで、運転者がハンドルバー41aを操作して三輪車10を旋回させようとしたときに、操舵が低速で行われる場合は、操舵に追従して車体を傾斜させることができるが、操舵が高速で行われる場合は、操舵に追従して車体を傾斜させることができないと、三輪車10の旋回安定性を十分に高くすることができない。
【0057】
そこで、本実施の形態においては、運転者がハンドルバー41aを操作したときの操舵軸部材42の回転速度、すなわち、操舵角βの変化率を表す操舵速度ωに基づいて操舵軸部材42の回動を規制し、操舵軸部材42を停止させるための操舵規制機構が配設され、該操舵規制機構を作動させることによって、操舵を規制することができる。なお、前記操舵速度ωによって車両の状態及びハンドルバー41aの操作状態が表される。
【0058】
図1は本発明の第1の実施の形態における操舵規制機構を示す図、図7は本発明の第1の実施の形態における搭乗・操舵部の要部を示す図、図8は本発明の第1の実施の形態における操舵規制機構の動作を示す第1の図、図9は本発明の第1の実施の形態における操舵規制機構の動作を示す第2の図である。
【0059】
図7において、11cはフレーム部材、12Fは車輪、17は前輪フォーク、55は前記フレーム部材11cにおける操舵軸部材42を支持する部分、すなわち、軸支持部、56は該軸支持部55の軸方向における所定の位置、本実施の形態においては、上端部に形成された操舵規制機構である。
【0060】
図1に示されるように、前記操舵規制機構56は、固定部材としてのステータ58、該ステータ58の径方向内方において回動自在に配設され、ハンドルバー41aの操作に伴って回動させられる回動部材としてのロータ59、及び該ロータ59の外周縁に配設され、ロータ59の回動を規制することによって、操舵軸部材42の回動を規制するための第1、第2の規制部材64、65を備える。
【0061】
前記ステータ58は、筒状の形状を有し、軸支持部55の上端部の径を大きくすることによって形成された筐(きょう)体部67、及び該筐体部67の内周面から径方向内方に向けて突出させて、かつ、筐体部67の内周面に沿って所定のピッチで形成された第1の係合部としての複数の歯68を備える。該各歯68は、所定の形状、本実施の形態においては、四角形の形状を有し、筐体部67の内周面から立ち上げて、ロータ59を左方向に回動させたときの回転方向における上流側に形成された第1の面s1、ロータ59を左方向に回動させたときの回転方向における下流側に形成された第2の面s2、及び前記第1の面s1の先端と第2の面s2の先端とを結ぶ第3の面s3(頂面)から成る。
【0062】
また、前記ロータ59は、円柱状の形状を有し、前記操舵軸部材42におけるステータ58と対向する部分に形成され、三輪車10を左方向に旋回させるために左方向への操舵が行われると、第1の回動方向、本実施の形態においては、矢印A方向(ロータ59を上方から見たときに左方向)に回動させられ、三輪車10を右方向に旋回させるために右方向への操舵が行われると、第2の回動方向、本実施の形態においては、矢印B方向(ロータ59を上方から見たときに右方向)に回動させられる。なお、ロータ59の外周面は、ステータ58とロータ59とが干渉するのを防止するために、前記各歯68の第3の面s3より径方向内方に位置させられる。
【0063】
そして、前記第1、第2の規制部材64、65は、ロータ59の円周方向における複数箇所、本実施の形態においては、2箇所に、互いに180〔°〕の角度だけ隔てて配設され、左方向及び右方向への操舵が低速で行われる場合、操舵軸部材42の回動を規制せず、左方向への操舵が高速で行われる場合、第1の規制部材64が操舵軸部材42の回動を規制し、右方向への操舵が高速で行われる場合、第2の規制部材65が操舵軸部材42の回動を規制する。
【0064】
そのために、前記第1の規制部材64は、前記ロータ59の外周縁の近傍において、支持軸st1を揺動中心としてロータ59によって揺動自在に支持され、ロータ59の回動に伴って揺動させられ、前記各歯68と選択的に係合させられる揺動部材としての、かつ、第2の係合部としてのストッパ71、矢印A方向における支持軸st1より下流側に、前記ロータ59の径方向において互いに所定の間隔を置いて配設され、ストッパ71の揺動角度を規定する一対の位置決め部材72、73、及び矢印A方向における支持軸st1より上流側に配設され、前記ストッパ71を、操舵が規制されない位置、すなわち、通常位置に置くように付勢する位置設定部としての、かつ、付勢部材としてのスプリング74を備える。
【0065】
前記ストッパ71は、矢印A方向における支持軸st1より下流側に向けて延在させて形成された第1のアーム部m1、及び矢印A方向における支持軸st1より上流側に向けて延在させて形成された第2のアーム部m2を備え、前記第1のアーム部m1の先端に、前記歯68とストッパ71とを係合させるための係合突部としての係合突起75が形成される。
【0066】
そして、前記スプリング74は、一端がロータ59に、他端が第2のアーム部m2の先端に固定され、第2のアーム部m2をロータ59の径方向外方に向けて付勢し、操舵速度ωが、スプリング74の付勢力によって決まる所定の閾値以下である場合、図1に示されるように、スプリング74の付勢力によって第1のアーム部m1が位置決め部材72に当接させられ、ストッパ71が通常位置に置かれる。
【0067】
また、前記第2の規制部材65は、前記ロータ59の外周縁の近傍において、支持軸st2を揺動中心としてロータ59によって揺動自在に支持され、ロータ59の回動に伴って揺動させられ、前記各歯68と選択的に係合させられる揺動部材としての、かつ、第2の係合部としてのストッパ81、矢印B方向における支持軸st2より下流側に、前記ロータ59の径方向において互いに所定の間隔を置いて配設され、ストッパ81の揺動角度を規定する一対の位置決め部材82、83、及び矢印B方向における支持軸st2より上流側に配設され、前記ストッパ81を通常位置に置くように付勢する位置設定部としての、かつ、付勢部材としてのスプリング84を備える。
【0068】
前記ストッパ81は、矢印B方向における支持軸st2より下流側に向けて延在させて形成された第1のアーム部m1、及び矢印B方向における支持軸st2より上流側に向けて延在させて形成された第2のアーム部m2を備え、前記第1のアーム部m1の先端に、前記歯68とストッパ81とを係合させるための係合突部としての係合突起85が形成される。
【0069】
そして、前記スプリング84は、一端がロータ59に、他端が第2のアーム部m2の先端に固定され、第2のアーム部m2をロータ59の径方向外方に向けて付勢し、操舵速度ωが、スプリング84の付勢力によって決まる所定の閾値以下である場合、図1に示されるように、スプリング84の付勢力によって第1のアーム部m1が位置決め部材82に当接させられ、ストッパ81が通常位置に置かれる。
【0070】
ところで、本実施の形態においては、前記第1、第2の規制部材64、65において、前記第1のアーム部m1の質量が第2のアーム部m2の質量より大きくされ、矢印A方向における支持軸st1より下流側にストッパ71の重心が、矢印B方向における支持軸st2より下流側にストッパ81の重心が置かれる。
【0071】
したがって、前記操舵速度ωが前記所定の閾値より高い場合、ロータ59が矢印A方向に回動させられると、図8に示されるように、支持軸st1より下流側に重心が置かれたストッパ71は、支持軸st1を中心として、重心がロータ59の径方向外方に移動するように回動させられ、第1のアーム部m1を位置決め部材73に当接させて、操舵が規制される位置、すなわち、規制位置に置かれる。その結果、係合突起75が歯68の第1の面s1に当接させられ、ストッパ71と歯68とが係合させられる。このようにして、操舵軸部材42の矢印A方向の回動が規制される。
【0072】
このとき、ストッパ81は、重心が矢印A方向における支持軸st2より上流側に置かれるので、重心がロータ59の径方向外方に移動するように回動させられることはなく、第1のアーム部m1を位置決め部材82に当接させたまま通常位置に置かれる。したがって、ストッパ81と歯68とが係合させられない。
【0073】
また、前記操舵速度ωが前記所定の閾値より高い場合、ロータ59が矢印B方向に回動させられると、図9に示されるように、支持軸st2より下流側に重心が置かれたストッパ81は、支持軸st2を中心として、重心がロータ59の径方向外方に移動するように回動させられ、第1のアーム部m1を位置決め部材83に当接させて規制位置に置かれる。その結果、係合突起85が歯68の第2の面s2に当接させられ、ストッパ81と歯68とが係合させられる。このようにして、操舵軸部材42の矢印B方向の回動が規制される。
【0074】
このとき、ストッパ71は、重心が矢印B方向における支持軸st1より上流側に置かれるので、重心がロータ59の径方向外方に移動するように回動させられることはなく、第1のアーム部m1を位置決め部材72に当接させたまま通常位置に置かれる。したがって、ストッパ71と歯68とが係合させられない。
【0075】
このように、本実施の形態においては、操舵が高速で行われる場合に、操舵軸部材42の回動が規制され、操舵角βが、操舵軸部材42の回動が規制されたときの値より大きくならないので、ハンドルバー41aを操作したときの三輪車10の旋回安定性を高くすることができる。また、傾斜制御において、操舵に追従して車体を傾斜させることができるので、運転者及び他の乗員が違和感を覚えるのを防止することができる。
【0076】
また、操舵規制機構56が軸支持部55に配設されるので、操舵規制機構56の構造を簡素化することができる。したがって、三輪車10を小型化することができる。
【0077】
そして、ロータ59が回動させられるのに伴って、ストッパ71、81が通常位置及び規制位置に選択的に置かれるので、ストッパ71、81を通常位置及び規制位置に置くためのアクチュエータを配設する必要がない。したがって、操舵規制機構56の構造を簡素化することができるだけでなく、三輪車10のコストを低くすることができる。
【0078】
次に、前記第2の規制部材65を制御部によって作動させることができるようにした本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0079】
図10は本発明の第2の実施の形態における操舵規制機構を示す図、図11は本発明の第2の実施の形態における操舵規制機構の動作を示す第1の図、図12は本発明の第2の実施の形態における操舵規制機構の動作を示す第2の図、図13は本発明の第2の実施の形態における通常位置に置かれたストッパの状態を示す図、図14は本発明の第2の実施の形態におけるストッパとアクチュエータとの連結部を示す図、図15は本発明の第2の実施の形態における規制位置に置かれたストッパの状態を示す第1の図、図16は本発明の第2の実施の形態における規制位置に置かれたストッパの状態を示す第2の図、図17は本発明の第2の実施の形態におけるストッパが規制位置に置かれたときのスイッチの状態を示す第1の図、図18は本発明の第2の実施の形態におけるストッパが規制位置に置かれたときのスイッチの状態を示す第2の図である。
【0080】
この場合、固定部材としての前記ステータ58及び回動部材としてのロータ59のうちの一方、本実施の形態においては、ロータ59に第1、第2の規制部材64、65が配設される。
【0081】
該第1、第2の規制部材64、65は、ロータ59の円周方向における複数箇所、本実施の形態においては、2箇所に、互いに180〔°〕の角度だけ隔てて配設され、左方向及び右方向への操舵が低速で行われる場合、ロータ59の回動を規制せず、左方向への操舵が高速で行われる場合、第1の規制部材64がロータ59の回動を規制し、右方向への操舵が高速で行われる場合、第2の規制部材64がロータ59の回動を規制する。
【0082】
そのために、前記第1の規制部材64は、前記ロータ59の外周縁の近傍に、支持軸st1を揺動中心として揺動自在に支持された揺動部材としての、かつ、第2の係合部としてのストッパ71、矢印A方向における支持軸st1より下流側に、前記ロータ59の径方向において互いに所定の間隔を置いて配設され、ストッパ71の揺動角度を規定する一対の位置決め部材72、73、及び矢印A方向における支持軸st1より上流側に配設され、前記ストッパ71の位置を設定し、通常位置及び規制位置に置くための位置設定部としてのアクチュエータ91を備える。
【0083】
前記ストッパ71は、矢印A方向における支持軸st1より下流側に向けて延在させて形成された第1のアーム部m1、及び矢印A方向における支持軸st1より上流側に向けて延在させて形成された第2のアーム部m2を備え、前記第1のアーム部m1の先端に、第1の係合部としての歯68とストッパ71とを係合させるための係合突部としての係合突起75が形成される。
【0084】
そして、前記アクチュエータ91は、第2のアーム部m2をロータ59の径方向外方及び径方向内方に向けて移動させ、図11に示されるように、第1のアーム部m1を位置決め部材72、73に選択的に当接させ、ストッパ71を通常位置及び規制位置に選択的に置く。このようにして、操舵軸部材42の矢印A方向の回動が規制される。
【0085】
また、前記第2の規制部材65は、前記ロータ59の外周縁の近傍に、支持軸st2を揺動中心として揺動自在に支持された第2の係合部としてのストッパ81、矢印B方向における支持軸st2より下流側に、前記ロータ59の径方向において互いに所定の間隔を置いて配設され、ストッパ81の揺動角度を規定する一対の位置決め部材82、83、及び矢印B方向における支持軸st2より上流側に配設され、前記ストッパ81を通常位置及び規制位置に置くための位置設定部としてのアクチュエータ92を備える。
【0086】
前記ストッパ81は、矢印B方向における支持軸st2より下流側に向けて延在させて形成された第1のアーム部m1、及び矢印B方向における支持軸st2より上流側に向けて延在させて形成された第2のアーム部m2を備え、前記第1のアーム部m1の先端に、前記歯68とストッパ81とを係合させるための係合突部としての係合突起85が形成される。
【0087】
そして、前記アクチュエータ92は、第2のアーム部m2をロータ59の径方向外方及び径方向内方に向けて移動させ、図12に示されるように、第1のアーム部m1を位置決め部材82、83に選択的に当接させ、ストッパ81を通常位置及び規制位置に選択的に置く。このようにして、操舵軸部材42の矢印B方向の回動が規制される。
【0088】
次に、図13〜18に基づいて、前記アクチュエータ91、92について説明する。この場合、アクチュエータ91、92の構造は同じであるので、アクチュエータ91についてだけ説明する。
【0089】
前記アクチュエータ91は、ロータ59の所定の部位に形成された固定部59aに取り付けられた位置設定用の駆動部としてのソレノイド93、該ソレノイド93とストッパ71の第2のアーム部m2の先端とを連結する連結要素94、及び前記ストッパ71を通常位置に置くように第2のアーム部m2をロータ59の径方向外方に向けて付勢する付勢部材としてのスプリング95を備える。
【0090】
前記ソレノイド93は、コイル部93a及び進退要素としてのプランジャ93bを備え、前記コイル部93aに図示されないコイルが配設される。また、前記連結要素94は、プランジャ93bの先端において、プランジャ93bによって回動自在に支持された第1の連結部94a、第2のアーム部m2の先端に、連結要素94の進退方向に沿って形成された長溝71a内において回動自在に、かつ、進退自在(摺動自在)に配設された第2の連結部94b、及び前記第1の連結部94aの両端と第2の連結部94bの両端とを連結する一対の第3の連結部94cを備える。そして、前記スプリング95は、一端がロータ59の所定の部位に形成された固定部59bに、他端が第2のアーム部m2の先端に固定される。なお、前記スプリング95のばね定数は、ロータ59が回動させられたときに、第1のアーム部m1に発生する遠心力によって、第2のアーム部m2がロータ59の径方向内方側に移動させられないように設定される。
【0091】
また、ロータ59におけるストッパ71と対向する面には、一対の電極tm1、tm2が、ストッパ71における第2のアーム部m2の裏面には電極tm3が形成され、前記電極tm1、tm2に電源回路96が接続される。なお、電極tm1〜tm3は導電性の高い材料、本実施の形態においては、銅板によって形成される。
【0092】
そして、前記コイルに電流が供給(通電)されず、アクチュエータ91がオフにされると、図13に示されるように、プランジャ93bが前進位置に置かれ、連結要素94も前進位置に置かれる。そして、第2のアーム部m2はスプリング95の付勢力によってロータ59の径方向外方側に移動させられ、ストッパ71は通常位置に置かれ、第2の連結部94bは、前記長溝71aのロータ59における径方向内方側の端部enに置かれる。このとき、電極tm1〜tm3は、図17に示されるように接続され、前記コイルに電流を供給することができる状態になる。
【0093】
また、前記コイルに電流が供給され、アクチュエータ91がオンにされると、図15に示されるように、プランジャ93bが後退位置に置かれ、連結要素94も後退位置に置かれる。そして、第2のアーム部m2がスプリング95の付勢力に抗してロータ59の径方向内方側に移動させられ、ストッパ71は、第1のアーム部m1を位置決め部材73に当接させて規制位置に置かれ、第2の連結部94bは、そのまま前記長溝71aの端部enに置かれる。
【0094】
このとき、図18に示されるように電極tm2、tm3間が遮(しゃ)断され、前記コイルへの電流の供給が停止させられ、前記アクチュエータ91がオフにされる。そして、プランジャ93bは、図16に示されるように前進位置に置かれ、連結要素94も前進位置に置かれるが、係合突起75と歯68との間に発生する摩擦力によって、係合突起75と歯68とは係合させられた状態を維持し、ストッパ71は規制位置に置かれたままになる。したがって、第2の連結部94bは、前記長溝71aのロータ59における径方向外方側の端部etに置かれる。
【0095】
なお、運転者が第1の操作部としての、かつ、操舵部材としてのハンドルバー41aを操作して反対の方向(操舵を戻す方向)に回動させると、ロータ59が反対の方向に回動させられ、係合突起75と歯68との係合が解除される。したがって、スプリング95の付勢力によって第2のアーム部m2がロータ59の径方向外方側に移動させられ、ストッパ71は通常位置に置かれる。そして、第2の連結部94bは、前記長溝71aのロータ59における径方向内方側の端部enに置かれる。
【0096】
ところで、本実施の形態においては、操舵速度ωが所定の閾値a以下である場合、アクチュエータ91、92においてソレノイド93がオフにされる。その場合、図10に示されるように、ストッパ71は第1のアーム部m1を位置決め部材72に当接させて通常位置に置かれ、ストッパ81は第1のアーム部m1を位置決め部材82に当接させて通常位置に置かれる。したがって、ストッパ71、81と歯68とが係合させられない。
【0097】
また、操舵速度ωが所定の閾値aより高い場合、ロータ59が矢印A方向に回動させられると、アクチュエータ91がオンにされ、アクチュエータ92がオフにされる。その場合、図11に示されるように、ストッパ71は第1のアーム部m1を位置決め部材73に当接させて規制位置に置かれ、ストッパ81は第1のアーム部m1を位置決め部材82に当接させて通常位置に置かれる。
【0098】
したがって、係合突起75が歯68の第1の面s1に当接させられ、ストッパ71と歯68とが係合させられる。このようにして、操舵軸部材42の矢印A方向の回動が規制される。
【0099】
そして、操舵速度ωが所定の閾値aより高い場合、ロータ59が矢印B方向に回動させられると、アクチュエータ91がオフにされ、アクチュエータ92がオンにされる。その場合、図12に示されるように、ストッパ71は第1のアーム部m1を位置決め部材72に当接させて通常位置に置かれ、ストッパ81は第1のアーム部m1を位置決め部材83に当接させて規制位置に置かれる。
【0100】
したがって、係合突起85が歯68の第2の面s2に当接させられ、ストッパ81と歯68とが係合させられる。このようにして、操舵軸部材42の矢印B方向の回動が規制される。
【0101】
次に、前記操舵規制機構56を作動させる際の前記制御部の動作について説明する。
【0102】
図19は本発明の第2の実施の形態における制御部の動作を示すフローチャートである。
【0103】
三輪車10の旋回時に、運転者がハンドルバー41aを操作して所定の方向に回動させ、操舵を行うと、前記制御部の車両状態判断処理手段としての、かつ、操作状態判断処理手段としての操舵速度判断処理手段は、車両状態判断処理としての、かつ、操作状態判断処理としての操舵速度判断処理を行い、操舵角βを読み込み、該操舵角βを微分することによって、操舵速度ωを算出(取得)し、該操舵速度ωが閾値aより高いかどうかを判断する(ステップS1)。
【0104】
そして、操舵速度ωが閾値aより高い場合、前記制御部の操舵規制処理手段は、操舵規制処理を行い、アクチュエータ91、92の一方をオンにして(ステップS2)、ストッパ71、81の一方を規制位置に置き、ストッパ71又はストッパ81と歯68とを係合させ、操舵軸部材42の回動を規制する。したがって、それ以上、操舵軸部材42が回動させられることはなく、操舵角βは、操舵軸部材42の回動が規制されたときの値に維持される。
【0105】
このように、本実施の形態においては、操舵が高速で行われる場合に、操舵軸部材42の回動が規制され、操舵角βが、操舵軸部材42の回動が規制されたときの値より大きくならないので、傾斜制御において操舵に追従して車体を傾斜させることができるようになる。したがって、運転者及び他の乗員が違和感を覚えるのを防止することができる。
【0106】
また、操舵速度ωが閾値aより高いかどうかによって、アクチュエータ91、92がオン・オフさせられ、ストッパ71、81が通常位置又は規制位置に置かれるので、ストッパ71、81を確実に通常位置及び規制位置に置くことができる。
【0107】
そして、ロータ59に電極tm1、tm2が、ストッパ71に電極tm3が形成され、ストッパ71、81が通常位置に置かれると、電極tm1〜tm3が接続され、前記コイルに電流を供給することができる状態になり、ストッパ71、81が規制位置に置かれると、電極tm2、tm3間が遮断され、前記コイルへの電流の供給が停止させられるので、ストッパ71、81の位置を検出するためのセンサを配設する必要がない。したがって、三輪車10のコストを低くすることができる。
【0108】
ところで、三輪車10に発生する横加速度gLが小さい場合は、仮に、操舵軸部材42の回動が規制されなくても、旋回安定性が低くなることはない。
【0109】
そこで、三輪車10に発生する横加速度gLが小さい場合に、操舵軸部材42の回動を規制しないようにすることができる。その場合、制御部の横加速度判断処理手段は、横加速度判断処理を行い、横加速度gLが閾値gLth以下であるかどうかを判断し、横加速度gLが閾値gLthより大きい場合、制御部の操舵規制処理手段は、操舵軸部材42の回動を規制し、横加速度gLが閾値gLth以下である場合、操舵規制処理手段は操舵軸部材42の回動を規制しない。したがって、操舵軸部材42の回動を規制する頻度を少なくすることができる。
【0110】
また、本実施の形態においては、操舵速度ωが閾値aより高い場合に、操舵軸部材42の回動が規制されるようになっているが、三輪車10の車速vが低い場合には、仮に、操舵軸部材42の回動が規制されなくても、旋回安定性が低くなることはない。
【0111】
そこで、車速vに対応させて操舵速度ωの閾値aを設定し、例えば、車速vが閾値vth以下である場合に、閾値aを大きくしてa1(>a)にすることができる。
【0112】
その場合、制御部の車速判断処理手段は、車速判断処理を行い、車速vが閾値vthより高いかどうかを判断し、車速vが閾値vthより高い場合に、制御部の閾値変更処理手段は、閾値変更処理を行い、閾値aを変更してa1にする。そして、前記操舵速度判断処理手段は、操舵速度ωが閾値a1より高いかどうかを判断する。したがって、操舵軸部材42の回動を規制する頻度を少なくすることができる。
【0113】
さらに、本実施の形態においては、操舵速度ωが閾値aより高い場合に、操舵軸部材42の回動が規制されるようになっているが、三輪車10に加わる横加速度gLが小さい場合には、仮に、操舵軸部材42の回動が規制されなくても、旋回安定性が低くなることはない。
【0114】
そこで、横加速度gLに対応させて操舵速度ωの閾値aを設定し、例えば、横加速度gLが閾値gLth以下である場合に、閾値aを大きくしてa1(>a)にすることができる。
【0115】
その場合、前記横加速度判断処理手段は、横加速度gLが閾値gLth以下であるかどうかを判断し、横加速度gLが閾値gLth以下である場合に、前記閾値変更処理手段は、閾値aを変更してa1にする。そして、前記操舵速度判断処理手段は、操舵速度ωが閾値a1より高いかどうかを判断する。したがって、操舵軸部材42の回動を規制する頻度を少なくすることができる。
【0116】
ところで、車速vが低い場合に、操舵速度ωに関係なく、操舵軸部材42の回動を規制しないようにすることができる。そこで、三輪車10の車速vが低い場合には、操舵軸部材42の回動を規制しないようにした本発明の第3の実施の形態について説明する。なお、第1、第2の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0117】
図20は本発明の第3の実施の形態における制御部の動作を示すフローチャートである。
【0118】
この場合、制御部の前記車速判断処理手段は、車速vが閾値vthより高いかどうかを判断し(ステップS11)、車速vが閾値vthより高い場合、前記操舵速度判断処理手段は、操舵角βを読み込み、該操舵角βを微分することによって操舵速度ωを算出し、該操舵速度ωが閾値aより高いかどうかを判断する(ステップS12)。
【0119】
そして、操舵速度ωが閾値aより高い場合、前記操舵規制処理手段は、位置設定部としてのアクチュエータ91、92の一方をオンにして(ステップS13)、揺動部材としての、かつ、第2の係合部としてのストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制する。
【0120】
この場合、車速vが閾値vth以下である場合に操舵軸部材42の回動が規制されないので、操舵軸部材42の回動を規制する頻度を少なくすることができる。したがって、例えば、三輪車10を駐車させる場合等において、低速で、かつ、素早い動作が必要になる場合に、操舵速度ωが高くても、操舵軸部材42の回動が規制されないので、第1の操作部としての、かつ、操舵部材としてのハンドルバー41aの操作性を高くすることができ、三輪車10を迅速に、かつ、確実に駐車させることができる。
【0121】
ところで、三輪車10を走行させているときに、路面18(図2)の凹凸によって車輪12Fに外力が加わり、車輪12Fが左方又は右方に振られることがある。その場合、操舵軸支持部材としての前輪フォーク17を介して操舵軸部材42に回動が伝達されるが、操舵軸部材42の回転角度が、操舵量検出部としての、かつ、舵角検出部としての操舵軸エンコーダ46によって操舵角βとして検出されるので、前記操舵速度判断処理において、操舵軸部材42の回転角度の変化率が操舵速度ωとして算出されることになり、操舵速度ωが閾値aより大きいと、前記操舵規制処理において操舵軸部材42の回動が規制されてしまう。
【0122】
そこで、車輪12Fに外力が加わったときに、操舵軸部材42の回動を規制しないようにした本発明の第4の実施の形態について説明する。なお、第1、第2の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0123】
図21は本発明の第4の実施の形態における制御部の動作を示すフローチャートである。
【0124】
この場合、前記制御部の外力判断処理手段は、外力判断処理を行い、第1のトルク検出部としての、かつ、第1のトルクセンサとしてのハンドル側トルクセンサ47によって検出された、第1の操作部としての、かつ、操舵部材としてのハンドルバー41aから操舵軸部材42(回動部材としてのロータ59)に入力される第1のトルクTs、及び第2のトルク検出部としての、かつ、第2のトルクセンサとしての操舵輪側トルクセンサ48によって検出された、車輪12Fから操舵軸部材42に入力される第2のトルクTtを読み込んで取得し、第1のトルクTsが第2のトルクTtより大きいかどうかを判断する(ステップS21)。
【0125】
そして、第1のトルクTsが第2のトルクTtより大きい場合、前記操舵速度判断処理手段は、操舵角βを読み込み、該操舵角βを微分することによって操舵速度ωを算出し、該操舵速度ωが閾値aより高いかどうかを判断し(ステップS22)、操舵速度ωが閾値a以下である場合、制御部は処理を終了する。
【0126】
また、操舵速度ωが閾値aより高い場合、前記操舵規制処理手段は、位置設定部としてのアクチュエータ91、92の一方をオンにして(ステップS23)、揺動部材としての、かつ、第2の係合部としてのストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制する。
【0127】
この場合、路面18の凹凸によって車輪12Fに外力が加わり、車輪12Fが左方又は右方に振られると、第1のトルクTsが第2のトルクTt以下になり、制御部は処理を終了するので、前記操舵規制処理において操舵軸部材42の回動が規制されることがない。したがって、操舵軸部材42の回動を規制する頻度を少なくすることができる。
【0128】
ところで、操舵規制処理において操舵軸部材42の回動が規制されると、通常、運転者はハンドルバー41aを元に戻すが、仮に、ハンドルバー41aを元に戻すことなく、三輪車10を走行し続けると、旋回安定性が低くなることがある。
【0129】
そこで、操舵規制処理において操舵軸部材42の回動が規制された後に、ハンドルバー41aが操作されていない場合に、旋回安定性が低くなるのを抑制するようにした本発明の第5の実施の形態について説明する。なお、第1〜第4の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0130】
図22は本発明の第5の実施の形態における制御部の動作を示すフローチャートである。
【0131】
この場合、前記操舵速度判断処理手段は、操舵角βを読み込み、該操舵角βを微分することによって操舵速度ωを算出し、操舵速度ωが閾値aより高いかどうかを判断する(ステップS31)。操舵速度ωが閾値aより高い場合、前記操舵規制処理手段は、位置設定部としてのアクチュエータ91、92の一方をオンにして(ステップS32)、揺動部材としての、かつ、第2の係合部としてのストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制する。
【0132】
そして、操舵軸部材42の回動が規制されると、前記操舵速度判断処理手段は、操舵速度ωが0(零)であるかどうかを判断し(ステップS33)、操舵速度ωが0である場合、前記車速判断処理手段は、三輪車10が走行しているかどうかを、車速vが0より高いかどうかによって判断し(ステップS34)、車速vが0より高い場合に、制御部の制動処理手段は、制動処理を行い、三輪車10の制動力(減速加速度)FBを所定の値、本実施の形態においては、0.1Gにセットし、三輪車10を0.1Gで制動する(ステップS35)。なお、Gは重力加速度である。
【0133】
そのために、前記制動処理手段は、車速vを読み込み、該車速vの変化率を表す減速度を算出し、減速度が0.1Gになるように走行用の駆動部としての駆動モータ51L、51Rを回生によって駆動する。なお、回生によって発生させられた電力はバッテリ装置に送られる。
【0134】
この場合、操舵規制処理において操舵軸部材42の回動が規制された後に、ハンドルバー41aが操作されないまま三輪車10が走行させられている場合に、三輪車10を制動させることができるので、旋回安定性が低くなるのを防止することができる。
【0135】
また、アクチュエータ91、92にフェールが発生したり、第1の係合部としての歯68と、係合突部としての係合突起75、85とが噛み込んで、係合を解除することができなくなったりしたときでも、三輪車10を制動させることができるので、旋回安定性が低くなるのを防止することができる。
【0136】
次に、本発明の第6の実施の形態について説明する。
【0137】
図23は本発明の第6の実施の形態における制御部の動作を示すフローチャートである。
【0138】
この場合、前記操舵速度判断処理手段は、操舵角βを読み込み、該操舵角βを微分することによって操舵速度ωを算出し、操舵速度ωが閾値aより高いかどうかを判断する(ステップS41)。操舵速度ωが閾値aより高い場合、前記操舵規制処理手段は、位置設定部としてのアクチュエータ91、92の一方をオンにして(ステップS42)、揺動部材としての、かつ、第2の係合部としてのストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制する。
【0139】
そして、操舵軸部材42の回動が規制されると、前記操舵速度判断処理手段は、操舵速度ωが0であるかどうかを判断し(ステップS43)、操舵速度ωが0である場合、前記車速判断処理手段は、三輪車10が走行しているかどうかを、車速vが0より高いかどうかによって判断し(ステップS44)、車速vが0より高い場合に、制御部の経過時間判断処理手段は、経過時間判断処理を行い、図示されないタイマのカウント値cをインクリメントし(ステップS45)、車速vが0より高いと判断されてから経過した時間、すなわち、経過時間tが、所定の時間、本実施の形態においては、2〔秒〕より大きいかどうかを判断する(ステップS46)。
【0140】
経過時間tが2〔秒〕より大きい場合、前記制動処理手段は、三輪車10の制動力(減速加速度)FBを最大値Fmaxにセットし(ステップS47)、三輪車10を最大値Fmaxで制動する。なお、前記操舵速度判断処理において、操舵速度ωが閾値a以下である場合、前記経過時間判断処理手段はタイマのカウント値cを0にする。
【0141】
この場合、操舵規制処理において操舵軸部材42の回動が規制された後に、操舵部材としてのハンドルバー41aが操作されないまま三輪車10が走行させられている場合に、三輪車10を停止させることができるので、旋回安定性が低くなるのを防止することができる。
【0142】
また、アクチュエータ91、92にフェールが発生したり、第1の係合部としての歯68と、係合突部としての係合突起75、85とが噛み込んで、係合を解除することができなくなったりしたときでも、三輪車10を停止させることができるので、旋回安定性が低くなるのを防止することができる。
【0143】
ところで、前記第4の実施の形態においては、外力判断処理において、車輪12Fから操舵軸部材42に入力される第2のトルクTtが、ハンドルバー41aから操舵軸部材42に入力される第1のトルクTsより大きい場合に、操舵軸部材42の回動が規制されないようになっているが、走行環境によっては旋回安定性が低くなってしまうことがある。例えば、運転者が一定の操舵角βでハンドルバー41aを操作しているときに、路面18の凹凸によって車輪12Fに大きな外力が加わり、車輪12Fが左方又は右方に大きく振られると、旋回安定性が低くなってしまう。
【0144】
そこで、運転者が一定の操舵角βでハンドルバー41aを操作しているときに、走行環境に応じて操舵軸部材42の回動を規制することができるようにした本発明の第7の実施の形態について説明する。なお、第1〜第6の実施の形態と同じ構造を有するものについては、同じ符号を付与し、同じ構造を有することによる発明の効果については同実施の形態の効果を援用する。
【0145】
図24は本発明の第7の実施の形態における制御部の動作を示すフローチャートである。
【0146】
ここでは、走行環境が路面18の凹凸である場合を例にとって説明する。すなわち、路面18の凹凸によって車輪12Fに大きな外力が加わった場合を例にとって説明する。
【0147】
この場合、前記制御部の外力判断処理手段は、第1の操作部としての、かつ、操舵部材としてのハンドルバー41aから操舵軸部材42に入力される第1のトルクTs、及び車輪12Fから操舵軸部材42に入力される第2のトルクTtを読み込み、第2のトルクTtが第1のトルクTsより大きいかどうかを判断し(ステップS51)、第2のトルクTtが第1のトルクTsより大きい場合、第2のトルクTtが、絶対値であらかじめ十分に大きく設定された閾値T’より大きいかどうかを判断する(ステップS52)。
【0148】
そして、第2のトルクTtが閾値T’より大きい場合、前記操舵速度判断処理手段は、操舵角βを読み込み、該操舵角βを微分することによって操舵速度ωを算出し、該操舵速度ωが0であるかどうかを判断し(ステップS53)、操舵速度ωが0である場合、前記操舵規制処理手段は、位置設定部としてのアクチュエータ91、92の一方をオンにして(ステップS54)、揺動部材としての、かつ、第2の係合部としてのストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制する。
【0149】
この場合、運転者が一定の操舵角βでハンドルバー41aを操作しているときに、路面18の凹凸によって車輪12Fに大きな外力が加わった場合に、操舵軸部材42の回動が規制されるので、旋回安定性が低くなるのを防止することができる。
【0150】
なお、旋回安定性に影響を及ぼす走行環境としては、路面18の凹凸に加えて、路面18の幅方向の傾斜、路面18の幅方向の段差等が考えられる。例えば、道路を走行中に、その区間だけ路面18が幅方向に傾斜している短い区間や、幅方向の段差が存在している短い区間を通過した場合、車体が傾斜した方向に車輪12Fが振られるので、旋回安定性が低くなってしまう。
【0151】
このような場合には、車体に図示されない横加速度センサを配設し、該横加速度センサによって検出された横加速度に応じて操舵軸部材42の回動を規制することにより、旋回安定性が低くなるのを防止することができる。
【0152】
具体的には、一般的な加速度センサ、ジャイロセンサ等から成る横加速度センサを、例えば、搭乗部11の背面等に配設し、前記横加速度センサによって検出された横加速度が所定の閾値より大きい場合に、操舵規制処理手段がアクチュエータ91、92の一方をオンにして、ストッパ71、81の一方を規制位置に置き、操舵軸部材42の回動を規制するようにする。これにより、路面18の幅方向の傾斜、路面18の幅方向の段差等によって車体が傾斜した場合に、操舵軸部材42の回動を適切に規制することができ、旋回安定性が低くなるのを防止することができる。
【0153】
次に、本発明にける他の態様について説明する。
【0154】
第1の態様において、
車両状態判断処理手段は、操舵速度を取得し、操舵速度が閾値より高いかどうかを判断する操舵速度判断処理手段であり、
操舵規制処理手段は、操舵速度が閾値より高い場合に、第2の係合部を第1の係合部と係合させ、回動部材の回動を規制する。
【0155】
また、第2の態様において、
第2の係合部は、固定部材に対して揺動自在に配設されて、第1の係合部と係合させられない通常位置、及び第1の係合部と係合させられる規制位置と採り、
操舵規制処理手段は、操舵速度が閾値以下である場合に、第2の係合部を通常位置に置き、操舵速度が閾値より高い場合に、第2の係合部を規制位置に置く。
【0156】
そして、第3の態様においては、
回動部材に第1、第2の規制部材が配設され、
第1の規制部材は、回動部材が左方向に回動させられるときに規制位置に置かれ、回動部材が右方向に回動させられるときに通常位置に置かれ、
第2の規制部材は、回動部材が左方向に回動させられるときに通常位置に置かれ、回動部材が右方向に回動させられるときに規制位置に置かれる。
【0157】
また、第4の態様において、
第2の係合部は、所定の支持軸を揺動中心にして回動部材によって揺動自在に支持され、
回動部材の回動方向における支持軸より下流側に、第2の係合部を第1の係合部と係合させるための係合突起が形成される。
【0158】
そして、第5の態様において、
回動部材は、操舵部材と、車両の前輪を支持する前輪フォークとを連結する操舵軸部材に形成される。
【0159】
また、第6の態様においては、
車速が閾値より高いかどうかを判断する車速判断処理手段と、
車速が閾値より高い場合に、操舵速度の閾値を大きくする閾値変更処理手段とを有する。
【0160】
そして、第7の態様においては、
横加速度が閾値以下であるかどうかを判断する横加速度判断処理手段と、
横加速度が閾値より大きい場合に、操舵速度の閾値を大きくする閾値変更処理手段とを有する。
【0161】
なお、本発明は前記各実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【符号の説明】
【0162】
10 三輪車
11c フレーム部材
41a ハンドルバー
58 ステータ
59 ロータ
64、65 第1、第2の規制部材
68 歯
71、81 ストッパ
【特許請求の範囲】
【請求項1】
乗員によって操作される操舵部材と、
車両のフレーム部材の所定の箇所に配設され、内周面に沿って第1の係合部が形成された固定部材と、
該固定部材の径方向内方において回動自在に配設され、前記操舵部材の操作に伴って回動させられる回動部材と、
該回動部材の外周縁に配設され、回動部材の回動を規制するための規制部材とを有するとともに、
該規制部材は、回動部材の回動速度を表す操舵速度が閾値より高い場合に、前記第1の係合部と係合させられる第2の係合部を備えることを特徴とする車両。
【請求項2】
前記第2の係合部は、固定部材に対して揺動自在に配設されて、第1の係合部と係合させられない通常位置、及び第1の係合部と係合させられる規制位置を採り、前記操舵速度が閾値以下である場合に、付勢部材の付勢力によって通常位置に置かれ、前記操舵速度が閾値より高い場合に、前記付勢部材の付勢力に抗して回動させられて規制位置に置かれる請求項1に記載の車両。
【請求項3】
前記回動部材に第1、第2の規制部材が配設され、
前記第1の規制部材は、前記回動部材が左方向に回動させられるときに規制位置に置かれ、回動部材が右方向に回動させられるときに通常位置に置かれ、
前記第2の規制部材は、前記回動部材が左方向に回動させられるときに通常位置に置かれ、回動部材が右方向に回動させられるときに規制位置に置かれる請求項1又は2に記載の車両。
【請求項4】
前記第2の係合部は、所定の支持軸を揺動中心にして回動部材によって揺動自在に支持され、
前記回動部材の回動方向における前記支持軸より下流側に、第2の係合部を第1の係合部と係合させるための係合突部が形成される請求項1〜3のいずれか1項に記載の車両。
【請求項5】
前記回動部材は、前記操舵部材と、車両の前輪を支持する前輪フォークとを連結する操舵軸部材に形成される請求項1〜4のいずれか1項に記載の車両。
【請求項6】
車両における所定の傾斜部位を傾斜させるための車両傾斜機構と、
該車両傾斜機構を作動させるためのアクチュエータと、
前記回動部材の回動角度を表す操舵角を検出する操舵量検出部と、
前記操舵角に基づいて傾斜制御を行い、前記アクチュエータを駆動する傾斜制御処理手段とを有する請求項1〜5のいずれか1項に記載の車両。
【請求項1】
乗員によって操作される操舵部材と、
車両のフレーム部材の所定の箇所に配設され、内周面に沿って第1の係合部が形成された固定部材と、
該固定部材の径方向内方において回動自在に配設され、前記操舵部材の操作に伴って回動させられる回動部材と、
該回動部材の外周縁に配設され、回動部材の回動を規制するための規制部材とを有するとともに、
該規制部材は、回動部材の回動速度を表す操舵速度が閾値より高い場合に、前記第1の係合部と係合させられる第2の係合部を備えることを特徴とする車両。
【請求項2】
前記第2の係合部は、固定部材に対して揺動自在に配設されて、第1の係合部と係合させられない通常位置、及び第1の係合部と係合させられる規制位置を採り、前記操舵速度が閾値以下である場合に、付勢部材の付勢力によって通常位置に置かれ、前記操舵速度が閾値より高い場合に、前記付勢部材の付勢力に抗して回動させられて規制位置に置かれる請求項1に記載の車両。
【請求項3】
前記回動部材に第1、第2の規制部材が配設され、
前記第1の規制部材は、前記回動部材が左方向に回動させられるときに規制位置に置かれ、回動部材が右方向に回動させられるときに通常位置に置かれ、
前記第2の規制部材は、前記回動部材が左方向に回動させられるときに通常位置に置かれ、回動部材が右方向に回動させられるときに規制位置に置かれる請求項1又は2に記載の車両。
【請求項4】
前記第2の係合部は、所定の支持軸を揺動中心にして回動部材によって揺動自在に支持され、
前記回動部材の回動方向における前記支持軸より下流側に、第2の係合部を第1の係合部と係合させるための係合突部が形成される請求項1〜3のいずれか1項に記載の車両。
【請求項5】
前記回動部材は、前記操舵部材と、車両の前輪を支持する前輪フォークとを連結する操舵軸部材に形成される請求項1〜4のいずれか1項に記載の車両。
【請求項6】
車両における所定の傾斜部位を傾斜させるための車両傾斜機構と、
該車両傾斜機構を作動させるためのアクチュエータと、
前記回動部材の回動角度を表す操舵角を検出する操舵量検出部と、
前記操舵角に基づいて傾斜制御を行い、前記アクチュエータを駆動する傾斜制御処理手段とを有する請求項1〜5のいずれか1項に記載の車両。
【図1】


【図2】

【図3】
【図4】
【図5】

【図6】
【図7】

【図8】
【図9】
【図10】

【図11】
【図12】
【図13】

【図14】

【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2012−17010(P2012−17010A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2010−155240(P2010−155240)
【出願日】平成22年7月7日(2010.7.7)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成22年7月7日(2010.7.7)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
[ Back to top ]