
車両
【課題】エンジンおよびモータを備えた車両において、クリープトルクカット時の燃費を向上させる。
【解決手段】エンジンおよびモータを備えた車両において、ECUは、バッテリ充電時(エンジン負荷運転時)にクリープトルクをカットする際、要求クリープトルクTcreqがエンジン直行トルクTepよりも大きい場合には、モータトルクを「要求クリープトルクTcreq−エンジン直行トルクTep」とし、要求クリープトルクTcreqがエンジン直行トルクTepよりも小さい場合(すなわち実際のクリープトルクを要求クリープトルクTcreqとするためにモータから負トルクを発生させる必要がある場合)には、モータトルクを「0」に設定する。
【解決手段】エンジンおよびモータを備えた車両において、ECUは、バッテリ充電時(エンジン負荷運転時)にクリープトルクをカットする際、要求クリープトルクTcreqがエンジン直行トルクTepよりも大きい場合には、モータトルクを「要求クリープトルクTcreq−エンジン直行トルクTep」とし、要求クリープトルクTcreqがエンジン直行トルクTepよりも小さい場合(すなわち実際のクリープトルクを要求クリープトルクTcreqとするためにモータから負トルクを発生させる必要がある場合)には、モータトルクを「0」に設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に関し、特にクリープトルクを発生する車両の制御に関する。
【背景技術】
【0002】
自動変速機を備えた車両では、シフトレンジが駆動レンジ(前進走行レンジあるいは後退走行レンジ)である場合、アクセルペダル非操作時であっても、微速で車両を推進させるトルク(いわゆるクリープトルク)が発生される。電気自動車では、モータによってクリープトルクを発生する構成が採用される。また、ハイブリッド車両では、エンジンおよびモータの少なくともいずれかの動力によってクリープトルクを発生する構成が採用される。
【0003】
このようなクリープトルクを発生する車両に関し、特開2008−92683号公報(特許文献1)には、車両停止前にクリープトルクを制限することで、車両操縦性を確保しつつ燃費向上と制動フィーリング悪化防止とを両立させる点が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−92683号公報
【特許文献2】特開2009−12655号公報
【特許文献3】特開2010−45899号公報
【特許文献4】特開2010−89543号公報
【特許文献5】特開2010−93990号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、アクセルペダル非操作時であっても、たとえば停車時かつブレーキ踏力がしきい値を超えている時には、不要なクリープトルクの発生を抑制するために、クリープトルクカットが行なわれる場合がある。しかしながら、たとえばハイブリッド車両において、クリープトルクカットを実現するために、たとえばエンジンによる駆動トルクを打ち消すためにモータから負トルクを出力させると、モータで電気的なロスが発生してしまい、返って燃費が悪化するおそれがある。
【0006】
本発明は、上述の問題を解決するためになされたものであって、その目的は、エンジンおよびモータを備えた車両において、クリープトルクカット時の燃費を向上させることである。
【課題を解決するための手段】
【0007】
この発明に係る車両は、エンジンと、モータと、エンジンおよびモータの少なくともいずれかから伝達されるトルクで回転される駆動軸と、エンジンおよびモータを制御する制御装置とを備える。制御装置は、エンジンのトルクが所定値以上である状態でアクセル非操作時の駆動軸の回転トルクであるクリープトルクを低下させる場合、モータのトルクを零以上の範囲内で低下させる。
【0008】
好ましくは、車両は、蓄電装置をさらに備える。エンジンは、エンジンの動力を用いた蓄電装置の充電が行なわれる場合に所定値以上のトルクを出力する状態に制御される。制御装置は、蓄電装置の充電中にクリープトルクを低下させる場合、モータのトルクを零以上の範囲内で低下させる。
【0009】
好ましくは、車両は、空調装置をさらに備える。エンジンは、エンジンの動力を用いた空調装置の作動が行なわれる場合に所定値以上のトルクを出力する状態に制御される。制御装置は、空調装置の作動中にクリープトルクを低下させる場合、モータのトルクを零以上の範囲で低下させる。
【0010】
好ましくは、車両は、駆動軸に連結されるリングギヤとサンギヤおよびリングギヤと係合するピニオンギヤとエンジンに連結されピニオンギヤを自転可能に支持するキャリアとを含む遊星歯車装置と、サンギアに連結されエンジンから遊星歯車装置を介して伝達される動力で発電するジェネレータとをさらに備える。
【0011】
好ましくは、制御装置は、エンジンから駆動軸に伝達されるエンジン直行トルクがクリープトルク要求値よりも小さい場合、モータのトルクをクリープトルク要求値からエンジン直行トルクを減じた値とし、エンジン直行トルクがクリープトルク要求値よりも大きい場合、モータのトルクを零にする。
【0012】
好ましくは、制御装置は、クリープトルク要求値の上限値からエンジン直行トルクを減じた値をモータのトルクが超えないように、モータのトルクの上限値を制限する。
【発明の効果】
【0013】
本発明によれば、エンジンおよびモータを備えた車両において、クリープトルクカット時の燃費を向上させることができる。
【図面の簡単な説明】
【0014】
【図1】本実施の形態に係る車両の全体ブロック図である。
【図2】動力分割機構の構造を示す図である。
【図3】動力分割装置の共線図を示す図である。
【図4】ECUの機能ブロック図である。
【図5】ECUの処理手順を示すフローチャートである。
【図6】クリープトルク率K、クリープトルクTc、モータトルクTm、および第2MGの消費電力の時間変化を示す図である。
【発明を実施するための形態】
【0015】
以下、図面を参照しつつ、本発明の実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがって、それらについての詳細な説明は繰返さない。
【0016】
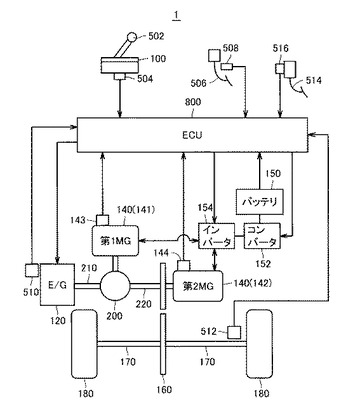
図1は、本実施の形態に係る車両1の全体ブロック図である。なお、本発明に係る車両は、図1に示す態様を有するハイブリッド車両に限定されず、他の態様を有するハイブリッド車両であってもよい。
【0017】
車両1は、エンジン120と、モータジェネレータ(Motor Generator、以下「MG」という)140とを含む。MG140は、第1MG141と、第2MG142とを含む。
【0018】
車両1は、エンジン120および第2MG142の少なくともいずれかの動力で走行するハイブリッド車両である。
【0019】
車両1は、さらに、減速機160と、動力分割機構200と、バッテリ150と、コンバータ152と、インバータ154と、電子制御ユニット(Electronic Control Unit、以下「ECU」という)800とを含む。
【0020】
減速機160は、エンジン120やMG140で発生した動力を駆動輪180に伝達したり、駆動輪180の駆動をエンジン120やMG140に伝達したりする。
【0021】
動力分割機構200は、入力軸210がエンジン120のクランクシャフトに接続され、エンジン120の発生する動力を出力軸220経由で駆動輪180に伝達される経路と第1MG141に伝達される経路とに分配する。
【0022】
バッテリ150は、MG140を駆動するための電力を蓄電する。コンバータ152は、ECU800からの制御信号に基づいて、バッテリ150とインバータ154との間で電圧変換を行なう。
【0023】
インバータ154は、ECU800からの制御信号に基づいて、コンバータ152とMG140との間で電力変換を行なう。インバータ154は、MG140をモータとして機能させる場合、バッテリ150の直流電力を交流電力に変換し、MG140に供給する。インバータ154は、MG140に供給する電力を制御することにより、MG140の作動状態(回転速度および回転方向)を制御する。
【0024】
ECU800には、レゾルバ143,144と、シフトポジションセンサ504と、アクセルポジションセンサ508と、エンジン回転速度センサ510と、車速センサ512と、ブレーキ踏力センサ516とがハーネスなどを経由して接続されている。
【0025】
レゾルバ143は、第1MG141の回転速度(第1MG回転速度Nm1)および回転方向を検出する。レゾルバ144は、第2MG142の回転速度(第2MG回転速度Nm2)および回転方向を検出する。シフトポジションセンサ504は、シフトゲート100に形成されたシフト通路に沿って移動可能に設けられるシフトレバー502の位置を検出する。アクセルポジションセンサ508は、アクセルペダル506の操作量(アクセル操作量ACC)を検出する。エンジン回転速度センサ510は、エンジン120の回転速度(エンジン回転速度Ne)を検出する。車速センサ512は、駆動軸170の回転速度を車速Vとして検出する。ブレーキ踏力センサ516は、ブレーキペダル514の踏み込み力(ブレーキ踏力)を検出する。各センサは、検出結果をECU800に送信する。
【0026】
ECU800は、図示しないCPU(Central Processing Unit)およびメモリを内蔵し、各センサの検出結果やメモリに記憶されたマップおよびプログラムに基づいて、所定の演算処理を実行する。ECU800は、車両1が所望の走行状態となるように各機器を制御する。
【0027】
ECU800は、シフトレバー502の位置に応じて車両1のシフトレンジを選択的に切り替える。シフトレンジが駆動レンジ(前進走行レンジまたは後進走行レンジ)である場合、ECU800は、車両1を駆動させるトルクを発生させるように、エンジン120およびMG140を制御する。
【0028】
また、ECU800は、車両1の走行状況に応じて、エンジン120の運転状態をアイドル運転状態および負荷運転状態のいずれかの状態に切り換える。負荷運転状態では、エンジン120はアイドル運転状態時のトルクよりも大きいトルクを出力する。
【0029】
たとえば、ECU800は、エンジン120の動力を用いて第1MG20で発電させた電力でバッテリ150を充電する場合、エンジン120を負荷運転状態に制御する。また、ECU800は、エンジン120の動力を用いて第1MG20で発電させた電力で図示しない空調装置を作動させる場合にもエンジン120を負荷運転状態に制御する。なお、他の条件が成立したときに、エンジン120を負荷運転状態に制御するようにしてもよい。
【0030】
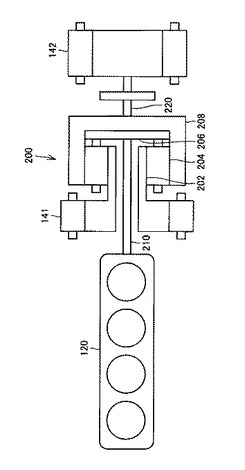
図2は、動力分割機構200の構造を示す図である。動力分割機構200は、サンギヤ202と、ピニオンギヤ204と、キャリア206と、リングギヤ208とを含む遊星歯車から構成される。
【0031】
ピニオンギヤ204は、サンギヤ202およびリングギヤ208と係合する。キャリア206は、ピニオンギヤ204を自転可能に支持するとともに、入力軸210を介してエンジン120に連結される。サンギヤ202は、第1MG141の回転軸に連結される。リングギヤ208は第2MG142の回転軸および出力軸220に連結される。
【0032】
図3は、動力分割装置200の共線図を示す図である。エンジン120、第1MG141および第2MG142が遊星歯車からなる動力分割装置200を介して連結されることで、図3に示すように、エンジン回転速度Ne、第1MG回転速度Nm1および第2MG回転速度Nm2は共線図において直線で結ばれる関係になる(図3は停車時の一例である)。なお、第2MG回転速度Nm2は車速Vに相当する(正比例する)。
【0033】
駆動軸170を回転させるトルク(以下、単に「車両駆動トルクTp」という)は、第2MG22から駆動軸170へ伝達されるトルク(以下、単に「モータトルクTm」という)と、エンジン120から動力分割装置200を介して駆動軸170へ伝達されるトルク(以下、単に「エンジン直行トルクTep」という)との合計値となる。なお、エンジン直行トルクTepは、エンジン120のトルク(エンジントルクTe)と動力分割装置200のギヤ比とで決まる値である。具体的には、リングギヤ202およびキャリア206間のギヤ比とキャリア206およびリングギヤ208間のギヤ比との比を1:ρとすると、エンジン直行トルクTepは、{1/(1+ρ)}×Teとなる。
【0034】
以上のような構成を有する車両1において、ECU800は、シフトレンジが駆動レンジである場合、「クリープトルク」を発生させる。ここで、「クリープトルク」とは、アクセルオフ時(アクセルペダル506の非操作時、すなわちアクセル操作量ACCが0パーセントである時)であっても駆動軸170を回転させて微速で車両1を推進させるためのトルクである。以下では、クリープトルクの発生を許可するための条件(本実施の形態では「シフトレンジが駆動レンジでかつアクセルオフ時」という条件)を「クリープトルク発生条件」という。
【0035】
クリープトルク発生条件成立時であっても、停車時かつブレーキオン時(ブレーキ踏力がしきい値を超えている時)には、ECU800は、「クリープトルクカット」を行なう。ここで、「クリープトルクカット」とは、クリープトルクを所定値(後述する上限クリープトルクTcmax)よりも低下させることをいう。以下では、クリープトルクカットの実行を許可するための条件(本実施の形態では「クリープトルク発生条件成立時かつ停車時かつブレーキオン時」という条件)を「クリープトルクカット条件」という。
【0036】
ところで、上述したように、エンジン負荷運転状態では、エンジン直行トルクTepが駆動軸170に伝達される。このような状態でクリープトルクカットを行なって実際のクリープトルクをエンジン直行トルクTep未満にするには、エンジン直行トルクTepを打ち消すための負トルクを第2MG142から発生させる必要があり、電気的なロスが発生してしまうことになる。
【0037】
そこで、本実施の形態によるECU800は、エンジン負荷運転状態でクリープトルクカットを行なう場合には、モータトルクTmを零以上の範囲内(すなわち負トルクを発生させない範囲内)で低下させる。この点が本発明の最も特徴的な点である。
【0038】
なお、エンジン負荷運転状態でクリープトルクカット条件が成立し得る代表的なパターンは、アクセルオフかつブレーキオン時での停車中に第1MG141の発電電力でバッテリ150を充電する場合である。そのため、以下では、主に、第1MG141の発電電力でバッテリ150を充電する時(以下、単に「バッテリ充電時」という)のクリープトルクの制御について詳細に説明する。なお、以下に説明する制御は、「エンジン負荷運転状態」であればよく、「バッテリ充電時」に限定されるものではない。したがって、たとえば「バッテリ充電時」に代えて「第1MG141の発電電力を用いて空調装置を作動させる場合」に、以下に説明する制御を行なうようにしてもよい。
【0039】
図4は、バッテリ充電時(エンジン負荷運転時)のクリープトルク制御に関する部分のECU800の機能ブロック図である。図4に示した各機能ブロックは、ハードウェアによって実現してもよいし、ソフトウェアによって実現してもよい。
【0040】
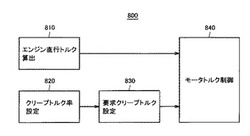
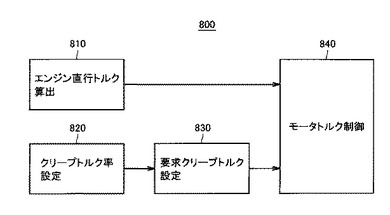
ECU800は、エンジン直行トルク算出部810と、クリープトルク率設定部820と、要求クリープトルク設定部830と、モータトルク制御部840とを含む。
【0041】
エンジン直行トルク算出部810は、上述したようにエンジントルクTeと動力分割装置200のギヤ比ρとからエンジン直行トルクTepを算出する。この際、エンジントルクTeとしては、エンジン制御に用いられる指令トルク値を用いてもよいし、エンジン運転状態から推定される推定トルク値を用いてもよい。
【0042】
クリープトルク率設定部820は、クリープトルク率Kを設定する。クリープトルク率Kは、要求クリープトルクTcreq(後述)の設定に用いられる係数である。クリープトルク率設定部820は、クリープトルク発生条件成立時にはクリープトルク率Kを「100パーセント(最大値)」に設定する。一方、クリープトルク率設定部820は、クリープトルクカット条件成立時にはクリープトルク率Kを0パーセント(最小値)から100パーセント(最大値)の範囲内でブレーキ踏力が大きいほど小さい値に設定する。このようにブレーキ踏力に応じてクリープトルク率Kを減少させることによって、不要なクリープトルクの発生が抑制され、無駄なエネルギ消費が削減される。
【0043】
要求クリープトルク設定部830は、上限クリープトルクTcmaxとクリープトルク率Kとの積(=Tcmax×K)を、要求クリープトルクTcreqとして算出する。つまり、クリープトルクをカットしない場合(K=100パーセントの場合)、要求クリープトルクTcreqは上限クリープトルクTcmaxとなる。上限クリープトルクTcmaxは、固定値であってもよいし、車速Vに応じた変動値であってもよい。いずれの場合であっても、上限クリープトルクTcmaxは停車時には一義的に決まる値である。
【0044】
モータトルク制御部840は、要求クリープトルクTcreqおよびエンジン直行トルクTepからモータトルクTmを制御する。
【0045】
モータトルク制御部840は、まず、要求クリープトルクTcreqからエンジン直行トルクTepを減じた値(=Tcreq−Tep)を、基本モータトルクTmbsとして算出する。そして、基本モータトルクTmbsが正である場合(要求クリープトルクTcreqがエンジン直行トルクTepよりも大きい場合)、モータトルク制御部840は、モータトルクTmを基本モータトルクTmbsに制御する。
【0046】
一方、基本モータトルクTmbsが負である場合(要求クリープトルクTcreqがエンジン直行トルクTepよりも小さい場合、すなわち実際のクリープトルクを要求クリープトルクTcreqとするために第2MG142から負トルクを発生させる必要がある場合)、モータトルク制御部840は、モータトルクTmを基本モータトルクTmbsではなく「0」に設定する。これにより、クリープトルクカット時に、エンジン直行トルクTepをクリープトルクとして出力することを許容することにはなるが、第2MG142から負トルクを発生させない分、電気的なロスの発生が抑制される。
【0047】
さらに、モータトルク制御部840は、上限クリープトルクTcmaxからエンジン直行トルクTepを減じた値(=Tcmax−Tep)を上限モータトルクTmmaxとして算出し、この上限モータトルクTmmaxをモータトルクTmの上限ガード値とする。具体的には、モータトルク制御部840は、モータトルクTmが上限モータトルクTmmaxを超える場合には、モータトルクTmを上限モータトルクTmmaxに補正する。
【0048】
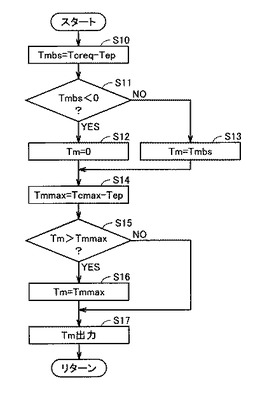
図5は、上述のモータトルク制御部840の機能を実現するためECU800の処理手順を示すフローチャートである。図5に示すフローチャートは、バッテリ充電中(エンジン負荷運転中)でかつクリープトルク発生条件成立中(クリープトルクカット条件成立中も含まれる)に、予め定められた周期で繰り返し実行される。
【0049】
S10にて、ECU800は、要求クリープトルクTcreqからエンジン直行トルクTepを減じた値(=Tcreq−Tep)を、基本モータトルクTmbsとして算出する。
【0050】
S11にて、ECU800は、基本モータトルクTmbsが負であるか否かを判定する。
【0051】
基本モータトルクTmbsが負である場合(S11にてYES)、ECU800は、処理をS12に移し、モータトルクTmを0に設定する。一方、基本モータトルクTmbsが負でない場合(S11にてNO)、ECU800は、処理をS13に移し、モータトルクTmを基本モータトルクTmbsに設定する。
【0052】
S14にて、ECU800は、上限クリープトルクTcmaxからエンジン直行トルクTepを減じた値を上限モータトルクTmmaxとして算出する。
【0053】
S15にて、ECU800は、モータトルクTmが上限モータトルクTmmaxを超えているか否かを判定する。
【0054】
モータトルクTmが上限モータトルクTmmaxを超えていない場合(S15にてNO)、ECU800は、処理をS17に移す。
【0055】
一方、モータトルクTmが上限モータトルクTmmaxを超えている場合(S15にてYES)、ECU800は、処理をS16に移し、モータトルクTmを上限モータトルクTmmaxに設定する。その後、ECU800は、処理をS17に移す。
【0056】
S17にて、ECU800は、実際の第2MG14のトルクを、S12、S13、S16のいずれかで設定されたモータトルクTmとするための指令信号をインバータ154に出力する。
【0057】
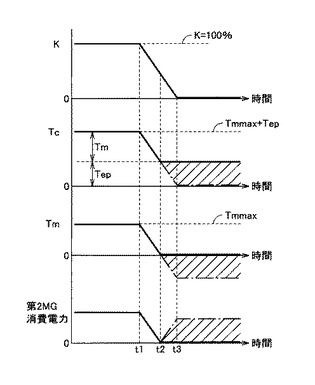
図6は、バッテリ充電時におけるクリープトルク率K、クリープトルクTc、モータトルクTm、および第2MG142の消費電力の時間変化を示す図である。
【0058】
バッテリ充電中はエンジン120が負荷運転状態に制御されるため、エンジン直行トルクTepが駆動軸170に伝達される。したがって、クリープトルクTcは、エンジン直行トルクTepとモータトルクTmとの和となる。
【0059】
時刻t1でクリープトルクカット条件が成立すると、クリープトルク率Kがブレーキ踏力に応じて100パーセントよりも低下し始める。これに伴い、要求クリープトルクTcreq(=Tcmax×K))も低下される。この際、バッテリ充電中でありエンジン直行トルクTepを低下させることができないため、モータトルクTmを低下させることによってクリープトルクTcが低下される。
【0060】
一方、基本モータトルクTmbs(=Tcreq−Tep)が負となる(すなわちTcreq<Tepとなる)時刻t2以降では、クリープトルク率Kが低下しても、モータトルクTmは負にはならず「0」に維持される。これにより、時刻t3までモータトルクTmの低下を継続させてモータトルクTmを負にすることを許容する場合(一点鎖線参照)に比べて、第2MG142の電気的ロス(斜線部分に相当)の発生が抑制される。
【0061】
以上のように、本実施の形態による車両1は、エンジン負荷運転状態でクリープトルクカットを行なう場合、モータトルクTmを零以上の範囲内で低下させる。これにより、クリープトルクカット時に、エンジン直行トルクTepを打ち消すため負トルクが第2MG142から発生されることを回避できる。そのため、第2MG142で電気的なロスが発生することを抑制でき、燃費向上を図ることができる。
【0062】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0063】
1 車両、100 シフトゲート、120 エンジン、140 MG、141 第1MG、142 第2MG、143,144 レゾルバ、150 バッテリ、152 コンバータ、154 インバータ、160 減速機、170 駆動軸、180 駆動輪、200 動力分割機構、202 サンギヤ、202 リングギヤ、204 ピニオンギヤ、206 キャリア、210 入力軸、220 出力軸、502 シフトレバー、504 シフトポジションセンサ、506 アクセルペダル、508 アクセルポジションセンサ、510 エンジン回転速度センサ、512 車速センサ、514 ブレーキペダル、516 ブレーキ踏力センサ、800 ECU、810 エンジン直行トルク算出部、820 クリープトルク率設定部、830 要求クリープトルク設定部、840 モータトルク制御部。
【技術分野】
【0001】
本発明は、車両に関し、特にクリープトルクを発生する車両の制御に関する。
【背景技術】
【0002】
自動変速機を備えた車両では、シフトレンジが駆動レンジ(前進走行レンジあるいは後退走行レンジ)である場合、アクセルペダル非操作時であっても、微速で車両を推進させるトルク(いわゆるクリープトルク)が発生される。電気自動車では、モータによってクリープトルクを発生する構成が採用される。また、ハイブリッド車両では、エンジンおよびモータの少なくともいずれかの動力によってクリープトルクを発生する構成が採用される。
【0003】
このようなクリープトルクを発生する車両に関し、特開2008−92683号公報(特許文献1)には、車両停止前にクリープトルクを制限することで、車両操縦性を確保しつつ燃費向上と制動フィーリング悪化防止とを両立させる点が開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−92683号公報
【特許文献2】特開2009−12655号公報
【特許文献3】特開2010−45899号公報
【特許文献4】特開2010−89543号公報
【特許文献5】特開2010−93990号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、アクセルペダル非操作時であっても、たとえば停車時かつブレーキ踏力がしきい値を超えている時には、不要なクリープトルクの発生を抑制するために、クリープトルクカットが行なわれる場合がある。しかしながら、たとえばハイブリッド車両において、クリープトルクカットを実現するために、たとえばエンジンによる駆動トルクを打ち消すためにモータから負トルクを出力させると、モータで電気的なロスが発生してしまい、返って燃費が悪化するおそれがある。
【0006】
本発明は、上述の問題を解決するためになされたものであって、その目的は、エンジンおよびモータを備えた車両において、クリープトルクカット時の燃費を向上させることである。
【課題を解決するための手段】
【0007】
この発明に係る車両は、エンジンと、モータと、エンジンおよびモータの少なくともいずれかから伝達されるトルクで回転される駆動軸と、エンジンおよびモータを制御する制御装置とを備える。制御装置は、エンジンのトルクが所定値以上である状態でアクセル非操作時の駆動軸の回転トルクであるクリープトルクを低下させる場合、モータのトルクを零以上の範囲内で低下させる。
【0008】
好ましくは、車両は、蓄電装置をさらに備える。エンジンは、エンジンの動力を用いた蓄電装置の充電が行なわれる場合に所定値以上のトルクを出力する状態に制御される。制御装置は、蓄電装置の充電中にクリープトルクを低下させる場合、モータのトルクを零以上の範囲内で低下させる。
【0009】
好ましくは、車両は、空調装置をさらに備える。エンジンは、エンジンの動力を用いた空調装置の作動が行なわれる場合に所定値以上のトルクを出力する状態に制御される。制御装置は、空調装置の作動中にクリープトルクを低下させる場合、モータのトルクを零以上の範囲で低下させる。
【0010】
好ましくは、車両は、駆動軸に連結されるリングギヤとサンギヤおよびリングギヤと係合するピニオンギヤとエンジンに連結されピニオンギヤを自転可能に支持するキャリアとを含む遊星歯車装置と、サンギアに連結されエンジンから遊星歯車装置を介して伝達される動力で発電するジェネレータとをさらに備える。
【0011】
好ましくは、制御装置は、エンジンから駆動軸に伝達されるエンジン直行トルクがクリープトルク要求値よりも小さい場合、モータのトルクをクリープトルク要求値からエンジン直行トルクを減じた値とし、エンジン直行トルクがクリープトルク要求値よりも大きい場合、モータのトルクを零にする。
【0012】
好ましくは、制御装置は、クリープトルク要求値の上限値からエンジン直行トルクを減じた値をモータのトルクが超えないように、モータのトルクの上限値を制限する。
【発明の効果】
【0013】
本発明によれば、エンジンおよびモータを備えた車両において、クリープトルクカット時の燃費を向上させることができる。
【図面の簡単な説明】
【0014】
【図1】本実施の形態に係る車両の全体ブロック図である。
【図2】動力分割機構の構造を示す図である。
【図3】動力分割装置の共線図を示す図である。
【図4】ECUの機能ブロック図である。
【図5】ECUの処理手順を示すフローチャートである。
【図6】クリープトルク率K、クリープトルクTc、モータトルクTm、および第2MGの消費電力の時間変化を示す図である。
【発明を実施するための形態】
【0015】
以下、図面を参照しつつ、本発明の実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがって、それらについての詳細な説明は繰返さない。
【0016】
図1は、本実施の形態に係る車両1の全体ブロック図である。なお、本発明に係る車両は、図1に示す態様を有するハイブリッド車両に限定されず、他の態様を有するハイブリッド車両であってもよい。
【0017】
車両1は、エンジン120と、モータジェネレータ(Motor Generator、以下「MG」という)140とを含む。MG140は、第1MG141と、第2MG142とを含む。
【0018】
車両1は、エンジン120および第2MG142の少なくともいずれかの動力で走行するハイブリッド車両である。
【0019】
車両1は、さらに、減速機160と、動力分割機構200と、バッテリ150と、コンバータ152と、インバータ154と、電子制御ユニット(Electronic Control Unit、以下「ECU」という)800とを含む。
【0020】
減速機160は、エンジン120やMG140で発生した動力を駆動輪180に伝達したり、駆動輪180の駆動をエンジン120やMG140に伝達したりする。
【0021】
動力分割機構200は、入力軸210がエンジン120のクランクシャフトに接続され、エンジン120の発生する動力を出力軸220経由で駆動輪180に伝達される経路と第1MG141に伝達される経路とに分配する。
【0022】
バッテリ150は、MG140を駆動するための電力を蓄電する。コンバータ152は、ECU800からの制御信号に基づいて、バッテリ150とインバータ154との間で電圧変換を行なう。
【0023】
インバータ154は、ECU800からの制御信号に基づいて、コンバータ152とMG140との間で電力変換を行なう。インバータ154は、MG140をモータとして機能させる場合、バッテリ150の直流電力を交流電力に変換し、MG140に供給する。インバータ154は、MG140に供給する電力を制御することにより、MG140の作動状態(回転速度および回転方向)を制御する。
【0024】
ECU800には、レゾルバ143,144と、シフトポジションセンサ504と、アクセルポジションセンサ508と、エンジン回転速度センサ510と、車速センサ512と、ブレーキ踏力センサ516とがハーネスなどを経由して接続されている。
【0025】
レゾルバ143は、第1MG141の回転速度(第1MG回転速度Nm1)および回転方向を検出する。レゾルバ144は、第2MG142の回転速度(第2MG回転速度Nm2)および回転方向を検出する。シフトポジションセンサ504は、シフトゲート100に形成されたシフト通路に沿って移動可能に設けられるシフトレバー502の位置を検出する。アクセルポジションセンサ508は、アクセルペダル506の操作量(アクセル操作量ACC)を検出する。エンジン回転速度センサ510は、エンジン120の回転速度(エンジン回転速度Ne)を検出する。車速センサ512は、駆動軸170の回転速度を車速Vとして検出する。ブレーキ踏力センサ516は、ブレーキペダル514の踏み込み力(ブレーキ踏力)を検出する。各センサは、検出結果をECU800に送信する。
【0026】
ECU800は、図示しないCPU(Central Processing Unit)およびメモリを内蔵し、各センサの検出結果やメモリに記憶されたマップおよびプログラムに基づいて、所定の演算処理を実行する。ECU800は、車両1が所望の走行状態となるように各機器を制御する。
【0027】
ECU800は、シフトレバー502の位置に応じて車両1のシフトレンジを選択的に切り替える。シフトレンジが駆動レンジ(前進走行レンジまたは後進走行レンジ)である場合、ECU800は、車両1を駆動させるトルクを発生させるように、エンジン120およびMG140を制御する。
【0028】
また、ECU800は、車両1の走行状況に応じて、エンジン120の運転状態をアイドル運転状態および負荷運転状態のいずれかの状態に切り換える。負荷運転状態では、エンジン120はアイドル運転状態時のトルクよりも大きいトルクを出力する。
【0029】
たとえば、ECU800は、エンジン120の動力を用いて第1MG20で発電させた電力でバッテリ150を充電する場合、エンジン120を負荷運転状態に制御する。また、ECU800は、エンジン120の動力を用いて第1MG20で発電させた電力で図示しない空調装置を作動させる場合にもエンジン120を負荷運転状態に制御する。なお、他の条件が成立したときに、エンジン120を負荷運転状態に制御するようにしてもよい。
【0030】
図2は、動力分割機構200の構造を示す図である。動力分割機構200は、サンギヤ202と、ピニオンギヤ204と、キャリア206と、リングギヤ208とを含む遊星歯車から構成される。
【0031】
ピニオンギヤ204は、サンギヤ202およびリングギヤ208と係合する。キャリア206は、ピニオンギヤ204を自転可能に支持するとともに、入力軸210を介してエンジン120に連結される。サンギヤ202は、第1MG141の回転軸に連結される。リングギヤ208は第2MG142の回転軸および出力軸220に連結される。
【0032】
図3は、動力分割装置200の共線図を示す図である。エンジン120、第1MG141および第2MG142が遊星歯車からなる動力分割装置200を介して連結されることで、図3に示すように、エンジン回転速度Ne、第1MG回転速度Nm1および第2MG回転速度Nm2は共線図において直線で結ばれる関係になる(図3は停車時の一例である)。なお、第2MG回転速度Nm2は車速Vに相当する(正比例する)。
【0033】
駆動軸170を回転させるトルク(以下、単に「車両駆動トルクTp」という)は、第2MG22から駆動軸170へ伝達されるトルク(以下、単に「モータトルクTm」という)と、エンジン120から動力分割装置200を介して駆動軸170へ伝達されるトルク(以下、単に「エンジン直行トルクTep」という)との合計値となる。なお、エンジン直行トルクTepは、エンジン120のトルク(エンジントルクTe)と動力分割装置200のギヤ比とで決まる値である。具体的には、リングギヤ202およびキャリア206間のギヤ比とキャリア206およびリングギヤ208間のギヤ比との比を1:ρとすると、エンジン直行トルクTepは、{1/(1+ρ)}×Teとなる。
【0034】
以上のような構成を有する車両1において、ECU800は、シフトレンジが駆動レンジである場合、「クリープトルク」を発生させる。ここで、「クリープトルク」とは、アクセルオフ時(アクセルペダル506の非操作時、すなわちアクセル操作量ACCが0パーセントである時)であっても駆動軸170を回転させて微速で車両1を推進させるためのトルクである。以下では、クリープトルクの発生を許可するための条件(本実施の形態では「シフトレンジが駆動レンジでかつアクセルオフ時」という条件)を「クリープトルク発生条件」という。
【0035】
クリープトルク発生条件成立時であっても、停車時かつブレーキオン時(ブレーキ踏力がしきい値を超えている時)には、ECU800は、「クリープトルクカット」を行なう。ここで、「クリープトルクカット」とは、クリープトルクを所定値(後述する上限クリープトルクTcmax)よりも低下させることをいう。以下では、クリープトルクカットの実行を許可するための条件(本実施の形態では「クリープトルク発生条件成立時かつ停車時かつブレーキオン時」という条件)を「クリープトルクカット条件」という。
【0036】
ところで、上述したように、エンジン負荷運転状態では、エンジン直行トルクTepが駆動軸170に伝達される。このような状態でクリープトルクカットを行なって実際のクリープトルクをエンジン直行トルクTep未満にするには、エンジン直行トルクTepを打ち消すための負トルクを第2MG142から発生させる必要があり、電気的なロスが発生してしまうことになる。
【0037】
そこで、本実施の形態によるECU800は、エンジン負荷運転状態でクリープトルクカットを行なう場合には、モータトルクTmを零以上の範囲内(すなわち負トルクを発生させない範囲内)で低下させる。この点が本発明の最も特徴的な点である。
【0038】
なお、エンジン負荷運転状態でクリープトルクカット条件が成立し得る代表的なパターンは、アクセルオフかつブレーキオン時での停車中に第1MG141の発電電力でバッテリ150を充電する場合である。そのため、以下では、主に、第1MG141の発電電力でバッテリ150を充電する時(以下、単に「バッテリ充電時」という)のクリープトルクの制御について詳細に説明する。なお、以下に説明する制御は、「エンジン負荷運転状態」であればよく、「バッテリ充電時」に限定されるものではない。したがって、たとえば「バッテリ充電時」に代えて「第1MG141の発電電力を用いて空調装置を作動させる場合」に、以下に説明する制御を行なうようにしてもよい。
【0039】
図4は、バッテリ充電時(エンジン負荷運転時)のクリープトルク制御に関する部分のECU800の機能ブロック図である。図4に示した各機能ブロックは、ハードウェアによって実現してもよいし、ソフトウェアによって実現してもよい。
【0040】
ECU800は、エンジン直行トルク算出部810と、クリープトルク率設定部820と、要求クリープトルク設定部830と、モータトルク制御部840とを含む。
【0041】
エンジン直行トルク算出部810は、上述したようにエンジントルクTeと動力分割装置200のギヤ比ρとからエンジン直行トルクTepを算出する。この際、エンジントルクTeとしては、エンジン制御に用いられる指令トルク値を用いてもよいし、エンジン運転状態から推定される推定トルク値を用いてもよい。
【0042】
クリープトルク率設定部820は、クリープトルク率Kを設定する。クリープトルク率Kは、要求クリープトルクTcreq(後述)の設定に用いられる係数である。クリープトルク率設定部820は、クリープトルク発生条件成立時にはクリープトルク率Kを「100パーセント(最大値)」に設定する。一方、クリープトルク率設定部820は、クリープトルクカット条件成立時にはクリープトルク率Kを0パーセント(最小値)から100パーセント(最大値)の範囲内でブレーキ踏力が大きいほど小さい値に設定する。このようにブレーキ踏力に応じてクリープトルク率Kを減少させることによって、不要なクリープトルクの発生が抑制され、無駄なエネルギ消費が削減される。
【0043】
要求クリープトルク設定部830は、上限クリープトルクTcmaxとクリープトルク率Kとの積(=Tcmax×K)を、要求クリープトルクTcreqとして算出する。つまり、クリープトルクをカットしない場合(K=100パーセントの場合)、要求クリープトルクTcreqは上限クリープトルクTcmaxとなる。上限クリープトルクTcmaxは、固定値であってもよいし、車速Vに応じた変動値であってもよい。いずれの場合であっても、上限クリープトルクTcmaxは停車時には一義的に決まる値である。
【0044】
モータトルク制御部840は、要求クリープトルクTcreqおよびエンジン直行トルクTepからモータトルクTmを制御する。
【0045】
モータトルク制御部840は、まず、要求クリープトルクTcreqからエンジン直行トルクTepを減じた値(=Tcreq−Tep)を、基本モータトルクTmbsとして算出する。そして、基本モータトルクTmbsが正である場合(要求クリープトルクTcreqがエンジン直行トルクTepよりも大きい場合)、モータトルク制御部840は、モータトルクTmを基本モータトルクTmbsに制御する。
【0046】
一方、基本モータトルクTmbsが負である場合(要求クリープトルクTcreqがエンジン直行トルクTepよりも小さい場合、すなわち実際のクリープトルクを要求クリープトルクTcreqとするために第2MG142から負トルクを発生させる必要がある場合)、モータトルク制御部840は、モータトルクTmを基本モータトルクTmbsではなく「0」に設定する。これにより、クリープトルクカット時に、エンジン直行トルクTepをクリープトルクとして出力することを許容することにはなるが、第2MG142から負トルクを発生させない分、電気的なロスの発生が抑制される。
【0047】
さらに、モータトルク制御部840は、上限クリープトルクTcmaxからエンジン直行トルクTepを減じた値(=Tcmax−Tep)を上限モータトルクTmmaxとして算出し、この上限モータトルクTmmaxをモータトルクTmの上限ガード値とする。具体的には、モータトルク制御部840は、モータトルクTmが上限モータトルクTmmaxを超える場合には、モータトルクTmを上限モータトルクTmmaxに補正する。
【0048】
図5は、上述のモータトルク制御部840の機能を実現するためECU800の処理手順を示すフローチャートである。図5に示すフローチャートは、バッテリ充電中(エンジン負荷運転中)でかつクリープトルク発生条件成立中(クリープトルクカット条件成立中も含まれる)に、予め定められた周期で繰り返し実行される。
【0049】
S10にて、ECU800は、要求クリープトルクTcreqからエンジン直行トルクTepを減じた値(=Tcreq−Tep)を、基本モータトルクTmbsとして算出する。
【0050】
S11にて、ECU800は、基本モータトルクTmbsが負であるか否かを判定する。
【0051】
基本モータトルクTmbsが負である場合(S11にてYES)、ECU800は、処理をS12に移し、モータトルクTmを0に設定する。一方、基本モータトルクTmbsが負でない場合(S11にてNO)、ECU800は、処理をS13に移し、モータトルクTmを基本モータトルクTmbsに設定する。
【0052】
S14にて、ECU800は、上限クリープトルクTcmaxからエンジン直行トルクTepを減じた値を上限モータトルクTmmaxとして算出する。
【0053】
S15にて、ECU800は、モータトルクTmが上限モータトルクTmmaxを超えているか否かを判定する。
【0054】
モータトルクTmが上限モータトルクTmmaxを超えていない場合(S15にてNO)、ECU800は、処理をS17に移す。
【0055】
一方、モータトルクTmが上限モータトルクTmmaxを超えている場合(S15にてYES)、ECU800は、処理をS16に移し、モータトルクTmを上限モータトルクTmmaxに設定する。その後、ECU800は、処理をS17に移す。
【0056】
S17にて、ECU800は、実際の第2MG14のトルクを、S12、S13、S16のいずれかで設定されたモータトルクTmとするための指令信号をインバータ154に出力する。
【0057】
図6は、バッテリ充電時におけるクリープトルク率K、クリープトルクTc、モータトルクTm、および第2MG142の消費電力の時間変化を示す図である。
【0058】
バッテリ充電中はエンジン120が負荷運転状態に制御されるため、エンジン直行トルクTepが駆動軸170に伝達される。したがって、クリープトルクTcは、エンジン直行トルクTepとモータトルクTmとの和となる。
【0059】
時刻t1でクリープトルクカット条件が成立すると、クリープトルク率Kがブレーキ踏力に応じて100パーセントよりも低下し始める。これに伴い、要求クリープトルクTcreq(=Tcmax×K))も低下される。この際、バッテリ充電中でありエンジン直行トルクTepを低下させることができないため、モータトルクTmを低下させることによってクリープトルクTcが低下される。
【0060】
一方、基本モータトルクTmbs(=Tcreq−Tep)が負となる(すなわちTcreq<Tepとなる)時刻t2以降では、クリープトルク率Kが低下しても、モータトルクTmは負にはならず「0」に維持される。これにより、時刻t3までモータトルクTmの低下を継続させてモータトルクTmを負にすることを許容する場合(一点鎖線参照)に比べて、第2MG142の電気的ロス(斜線部分に相当)の発生が抑制される。
【0061】
以上のように、本実施の形態による車両1は、エンジン負荷運転状態でクリープトルクカットを行なう場合、モータトルクTmを零以上の範囲内で低下させる。これにより、クリープトルクカット時に、エンジン直行トルクTepを打ち消すため負トルクが第2MG142から発生されることを回避できる。そのため、第2MG142で電気的なロスが発生することを抑制でき、燃費向上を図ることができる。
【0062】
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0063】
1 車両、100 シフトゲート、120 エンジン、140 MG、141 第1MG、142 第2MG、143,144 レゾルバ、150 バッテリ、152 コンバータ、154 インバータ、160 減速機、170 駆動軸、180 駆動輪、200 動力分割機構、202 サンギヤ、202 リングギヤ、204 ピニオンギヤ、206 キャリア、210 入力軸、220 出力軸、502 シフトレバー、504 シフトポジションセンサ、506 アクセルペダル、508 アクセルポジションセンサ、510 エンジン回転速度センサ、512 車速センサ、514 ブレーキペダル、516 ブレーキ踏力センサ、800 ECU、810 エンジン直行トルク算出部、820 クリープトルク率設定部、830 要求クリープトルク設定部、840 モータトルク制御部。
【特許請求の範囲】
【請求項1】
エンジンと、
モータと、
前記エンジンおよび前記モータの少なくともいずれかから伝達されるトルクで回転される駆動軸と、
前記エンジンおよび前記モータを制御する制御装置とを備え、
前記制御装置は、前記エンジンのトルクが所定値以上である状態でアクセル非操作時の前記駆動軸の回転トルクであるクリープトルクを低下させる場合、前記モータのトルクを零以上の範囲内で低下させる、車両。
【請求項2】
前記車両は、蓄電装置をさらに備え、
前記エンジンは、前記エンジンの動力を用いた前記蓄電装置の充電が行なわれる場合に前記所定値以上のトルクを出力する状態に制御され、
前記制御装置は、前記蓄電装置の充電中に前記クリープトルクを低下させる場合、前記モータのトルクを零以上の範囲内で低下させる、請求項1に記載の車両。
【請求項3】
前記車両は、空調装置をさらに備え、
前記エンジンは、前記エンジンの動力を用いた前記空調装置の作動が行なわれる場合に前記所定値以上のトルクを出力する状態に制御され、
前記制御装置は、前記空調装置の作動中に前記クリープトルクを低下させる場合、前記モータのトルクを零以上の範囲で低下させる、請求項1に記載の車両。
【請求項4】
前記車両は、
前記駆動軸に連結されるリングギヤと、サンギヤおよびリングギヤと係合するピニオンギヤと、前記エンジンに連結され前記ピニオンギヤを自転可能に支持するキャリアとを含む遊星歯車装置と、
前記サンギアに連結され前記エンジンから前記遊星歯車装置を介して伝達される動力で発電するジェネレータとをさらに備える、請求項2または3に記載の車両。
【請求項5】
前記制御装置は、前記エンジンから前記駆動軸に伝達されるエンジン直行トルクがクリープトルク要求値よりも小さい場合、前記モータのトルクを前記クリープトルク要求値から前記エンジン直行トルクを減じた値とし、前記エンジン直行トルクが前記クリープトルク要求値よりも大きい場合、前記モータのトルクを零にする、請求項4に記載の車両。
【請求項6】
前記制御装置は、前記クリープトルク要求値の上限値から前記エンジン直行トルクを減じた値を前記モータのトルクが超えないように、前記モータのトルクの上限値を制限する、請求項5に記載の車両。
【請求項1】
エンジンと、
モータと、
前記エンジンおよび前記モータの少なくともいずれかから伝達されるトルクで回転される駆動軸と、
前記エンジンおよび前記モータを制御する制御装置とを備え、
前記制御装置は、前記エンジンのトルクが所定値以上である状態でアクセル非操作時の前記駆動軸の回転トルクであるクリープトルクを低下させる場合、前記モータのトルクを零以上の範囲内で低下させる、車両。
【請求項2】
前記車両は、蓄電装置をさらに備え、
前記エンジンは、前記エンジンの動力を用いた前記蓄電装置の充電が行なわれる場合に前記所定値以上のトルクを出力する状態に制御され、
前記制御装置は、前記蓄電装置の充電中に前記クリープトルクを低下させる場合、前記モータのトルクを零以上の範囲内で低下させる、請求項1に記載の車両。
【請求項3】
前記車両は、空調装置をさらに備え、
前記エンジンは、前記エンジンの動力を用いた前記空調装置の作動が行なわれる場合に前記所定値以上のトルクを出力する状態に制御され、
前記制御装置は、前記空調装置の作動中に前記クリープトルクを低下させる場合、前記モータのトルクを零以上の範囲で低下させる、請求項1に記載の車両。
【請求項4】
前記車両は、
前記駆動軸に連結されるリングギヤと、サンギヤおよびリングギヤと係合するピニオンギヤと、前記エンジンに連結され前記ピニオンギヤを自転可能に支持するキャリアとを含む遊星歯車装置と、
前記サンギアに連結され前記エンジンから前記遊星歯車装置を介して伝達される動力で発電するジェネレータとをさらに備える、請求項2または3に記載の車両。
【請求項5】
前記制御装置は、前記エンジンから前記駆動軸に伝達されるエンジン直行トルクがクリープトルク要求値よりも小さい場合、前記モータのトルクを前記クリープトルク要求値から前記エンジン直行トルクを減じた値とし、前記エンジン直行トルクが前記クリープトルク要求値よりも大きい場合、前記モータのトルクを零にする、請求項4に記載の車両。
【請求項6】
前記制御装置は、前記クリープトルク要求値の上限値から前記エンジン直行トルクを減じた値を前記モータのトルクが超えないように、前記モータのトルクの上限値を制限する、請求項5に記載の車両。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−250657(P2012−250657A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−126119(P2011−126119)
【出願日】平成23年6月6日(2011.6.6)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月6日(2011.6.6)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]