
車両
【課題】車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができるようにする。
【解決手段】互いに連結された操舵部及び本体部を備える車体と、車体を操舵する操舵可能な操舵輪と、操舵不能な非操舵輪と、操舵指令情報を入力する操舵装置と、操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、操舵装置から入力された操舵指令情報に基づいて操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、制御装置は、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。
【解決手段】互いに連結された操舵部及び本体部を備える車体と、車体を操舵する操舵可能な操舵輪と、操舵不能な非操舵輪と、操舵指令情報を入力する操舵装置と、操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、操舵装置から入力された操舵指令情報に基づいて操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、制御装置は、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、少なくとも左右一対の車輪を有する車両に関するものである。
【背景技術】
【0002】
近年、エネルギ資源の枯渇問題に鑑み、車両の省燃費化が強く要求されている。その一方で、車両の低価格化等から、車両の保有者が増大し、1人が1台の車両を保有する傾向にある。そのため、例えば、4人乗りの車両を運転者1人のみが運転することで、エネルギが無駄に消費されるという問題点があった。車両の小型化による省燃費化としては、車両を1人乗りの三輪車又は四輪車として構成する形態が最も効率的であるといえる。
【0003】
しかし、走行状態によっては、車両の安定性が低下してしまうことがある。そこで、車体を横方向に傾斜させることによって、旋回時の車両の安定性を向上させる技術が提案されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−155671号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、前記従来の車両においては、旋回性能を向上させるために、車体を旋回方向内側に傾斜させることができるようになっているが、旋回方向外側に向けて作用する遠心力の影響によって、トレッドが狭い場合や、重心位置が高い場合や、操舵(だ)速度が速い場合には、車両の安定性が低下しやすく、乗員が不快に感じたり、不安を抱いたりしてしまうことがある。
【0006】
本発明は、前記従来の車両の問題点を解決して、操舵操作の初期、すなわち、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させることによって、トレッドが狭い場合や、重心位置が高い場合や、操舵速度が速い場合であっても、スムーズに車体を旋回方向内側に傾斜させることができるので、車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができる安全性の高い車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
そのために、本発明の車両においては、互いに連結された操舵部及び本体部を備える車体と、前記操舵部に回転可能に取り付けられた車輪であって、前記車体を操舵する操舵可能な操舵輪と、前記本体部に回転可能に取り付けられた車輪であって、操舵不能な非操舵輪と、操舵指令情報を入力する操舵装置と、前記操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、前記操舵装置から入力された操舵指令情報に基づいて前記操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、前記傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、該制御装置は、操舵初期に、前記操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。
【発明の効果】
【0008】
請求項1の構成によれば、操舵初期に、旋回方向内側に向けて車体の重心を移動させることができ、スムーズに車体を旋回方向内側に傾斜させることができるので、操縦性や危機回避性能を犠牲とすることなしに、車体の安定性を維持することができる。
【0009】
請求項2の構成によれば、操舵初期に操舵指令情報に含まれる操舵方向と反対の方向に操舵輪の操舵角を変化させるだけで、旋回方向内側に向けて車体の重心を移動させることができる。したがって、構造を複雑化することなく、操舵初期に、スムーズに車体を旋回方向内側に傾斜させることができる。
【0010】
請求項3〜5の構成によれば、操舵初期にのみ操舵指令情報に含まれる操舵方向と反対の方向に操舵輪の操舵角を変化させることができ、操舵操作の終期、すなわち、操舵終期には操舵指令情報に含まれる操舵方向と反対の方向に操舵輪の操舵角を変化させないようにすることができる。したがって、車体の安定性を維持することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施の形態における車両の構成を示す右側面図である。
【図2】本発明の第1の実施の形態における車両のリンク機構の構成を示す図である。
【図3】本発明の第1の実施の形態における車両の構成を示す背面図である。
【図4】本発明の第1の実施の形態における車体傾斜制御システムの構成を示すブロック図である。
【図5】本発明の第1の実施の形態における制御系のブロック図である。
【図6】本発明の第1の実施の形態における旋回走行時の車体の傾斜動作を説明する力学モデルを示す図である。
【図7】本発明の第1の実施の形態における横加速度演算処理の動作を示すフローチャートである。
【図8】本発明の第1の実施の形態におけるリンク角速度推定処理の動作を示すフローチャートである。
【図9】本発明の第1の実施の形態におけるヨーレートの微分処理のサブルーチンを示すフローチャートである。
【図10】本発明の第1の実施の形態におけるフィルタ処理のサブルーチンを示すフローチャートである。
【図11】本発明の第1の実施の形態における傾斜制御処理の動作を示すフローチャートである。
【図12】本発明の第1の実施の形態における操舵制御処理の動作を示すフローチャートである。
【図13】本発明の第1の実施の形態におけるリンクモータ制御処理の動作を示すフローチャートである。
【図14】本発明の第2の実施の形態における制御系のブロック図である。
【図15】本発明の第2の実施の形態における操舵制御処理の動作を示すフローチャートである。
【図16】本発明の第3の実施の形態における制御系のブロック図である。
【図17】本発明の第3の実施の形態における伝達関数の入力と出力との関係を示す図である。
【図18】本発明の第3の実施の形態における操舵制御処理の動作を示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。
【0013】
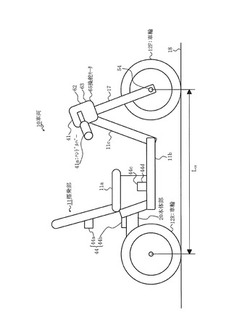
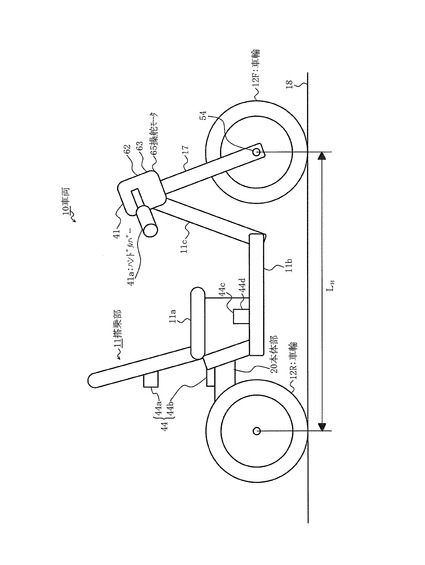
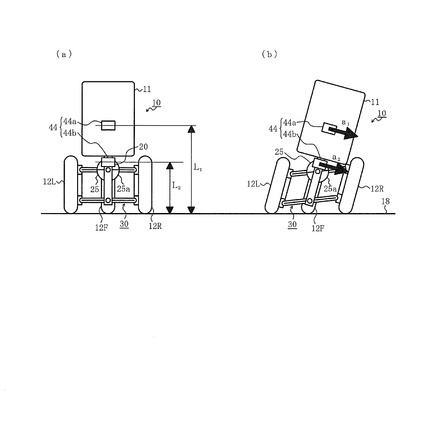
図1は本発明の第1の実施の形態における車両の構成を示す右側面図、図2は本発明の第1の実施の形態における車両のリンク機構の構成を示す図、図3は本発明の第1の実施の形態における車両の構成を示す背面図である。なお、図3において、(a)は車体が直立している状態を示す図、(b)は車体が傾斜している状態を示す図である。
【0014】
図において、10は、本実施の形態における車両であり、車体の駆動部としての本体部20と、乗員が搭乗して操舵する操舵部としての搭乗部11と、車体の前方において幅方向の中心に配設された前輪である操舵可能な操舵輪としての車輪12Fと、後輪として後方に配設された駆動輪であって操舵不能な非操舵輪としての左側の車輪12L及び右側の車輪12Rとを有する。さらに、前記車両10は、車体を左右に傾斜させる、すなわち、リーンさせるためのリーン機構、すなわち、車体傾斜機構として、左右の車輪12L及び12Rを支持するリンク機構30と、該リンク機構30を作動させるアクチュエータである傾斜用アクチュエータ装置としてのリンクモータ25とを有する。なお、前記車両10は、前輪が左右二輪であって後輪が一輪の三輪車であってもよいし、前輪及び後輪が左右二輪の四輪車であってもよいが、本実施の形態においては、図に示されるように、前輪が一輪であって後輪が左右二輪の三輪車である場合について説明する。また、操舵輪が駆動輪として機能してもよいが、本実施の形態においては、操舵輪は駆動輪として機能しないものとして説明する。
【0015】
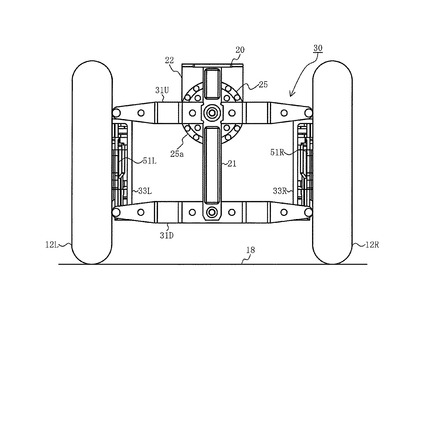
旋回時には、左右の車輪12L及び12Rの路面18に対する角度、すなわち、キャンバ角を変化させるとともに、搭乗部11及び本体部20を含む車体を旋回内輪側へ傾斜させることによって、旋回性能の向上と乗員の快適性の確保とを図ることができるようになっている。すなわち、前記車両10は車体を横方向(左右方向)にも傾斜させることができる。なお、図2及び3(a)に示される例においては、左右の車輪12L及び12Rは路面18に対して直立している、すなわち、キャンバ角が0度になっている。また、図3(b)に示される例においては、左右の車輪12L及び12Rは路面18に対して右方向に傾斜している、すなわち、キャンバ角が付与されている。
【0016】
前記リンク機構30は、左側の車輪12L及び該車輪12Lに駆動力を付与する電気モータ等から成る左側の回転駆動装置51Lを支持する左側の縦リンクユニット33Lと、右側の車輪12R及び該車輪12Rに駆動力を付与する電気モータ等から成る右側の回転駆動装置51Rを支持する右側の縦リンクユニット33Rと、左右の縦リンクユニット33L及び33Rの上端同士を連結する上側の横リンクユニット31Uと、左右の縦リンクユニット33L及び33Rの下端同士を連結する下側の横リンクユニット31Dと、本体部20に上端が固定され、上下に延在する中央縦部材21とを有する。また、左右の縦リンクユニット33L及び33Rと上下の横リンクユニット31U及び31Dとは回転可能に連結されている。さらに、上下の横リンクユニット31U及び31Dは、その中央部で中央縦部材21と回転可能に連結されている。なお、左右の車輪12L及び12R、左右の回転駆動装置51L及び51R、左右の縦リンクユニット33L及び33R、並びに、上下の横リンクユニット31U及び31Dを統合的に説明する場合には、車輪12、回転駆動装置51、縦リンクユニット33及び横リンクユニット31として説明する。
【0017】
そして、駆動用アクチュエータ装置としての前記回転駆動装置51は、いわゆるインホイールモータであって、固定子としてのボディが縦リンクユニット33に固定され、前記ボディに回転可能に取り付けられた回転子としての回転軸が車輪12の軸に接続され、前記回転軸の回転によって車輪12を回転させる。なお、前記回転駆動装置51は、インホイールモータ以外の種類のモータであってもよい。
【0018】
また、前記リンクモータ25は、電気モータ等を含む回転式の電動アクチュエータであって、固定子としての円筒状のボディと、該ボディに回転可能に取り付けられた回転子としての回転軸とを備えるものであり、前記ボディが取付フランジ22を介して本体部20に固定され、前記回転軸がリンク機構30の上側の横リンクユニット31Uに固定されている。なお、リンクモータ25の回転軸は、本体部20を傾斜させる傾斜軸として機能し、中央縦部材21と上側の横リンクユニット31Uとの連結部分の回転軸と同軸になっている。そして、リンクモータ25を駆動して回転軸をボディに対して回転させると、本体部20及び該本体部20に固定された中央縦部材21に対して上側の横リンクユニット31Uが回動し、リンク機構30が作動する、すなわち、屈伸する。これにより、本体部20を傾斜させることができる。なお、リンクモータ25は、その回転軸が本体部20及び中央縦部材21に固定され、そのボディが上側の横リンクユニット31Uに固定されていてもよい。
【0019】
また、リンクモータ25は、リンク機構30のリンク角の変化を検出するリンク角センサ25aを備える。該リンク角センサ25aは、リンクモータ25においてボディに対する回転軸の回転角を検出する回転角センサであって、例えば、レゾルバ、エンコーダ等から成る。前述のように、リンクモータ25を駆動して回転軸をボディに対して回転させると、本体部20及び該本体部20に固定された中央縦部材21に対して上側の横リンクユニット31Uが回動するのであるから、ボディに対する回転軸の回転角を検出することによって、中央縦部材21に対する上側の横リンクユニット31Uの角度の変化、すなわち、リンク角の変化を検出することができる。
【0020】
なお、リンクモータ25は、回転軸をボディに対して回転不能に固定する図示されないロック機構を備える。該ロック機構は、メカニカルな機構であって、回転軸をボディに対して回転不能に固定している間には電力を消費しないものであることが望ましい。前記ロック機構によって、回転軸をボディに対して所定の角度で回転不能に固定することができる。
【0021】
前記搭乗部11は、本体部20の前端に図示されない連結部を介して連結される。該連結部は、搭乗部11と本体部20とを所定の方向に相対的に変位可能に連結する機能を有していてもよい。
【0022】
また、前記搭乗部11は、座席11a、フットレスト11b及び風よけ部11cを備える。前記座席11aは、車両10の走行中に乗員が着座するための部位である。また、前記フットレスト11bは、乗員の足部を支持するための部位であり、座席11aの前方側(図1における右側)下方に配設される。
【0023】
さらに、搭乗部11の後方若しくは下方又は本体部20には、図示されないバッテリ装置が配設されている。該バッテリ装置は、回転駆動装置51及びリンクモータ25のエネルギ供給源である。また、搭乗部11の後方若しくは下方又は本体部20には、図示されない制御装置、インバータ装置、各種センサ等が収納されている。
【0024】
そして、座席11aの前方には、操縦装置41が配設されている。該操縦装置41には、乗員が操作して操舵方向、操舵角等の操舵指令情報を入力する操舵装置としてのハンドルバー41a、速度メータ等のメータ、インジケータ、スイッチ等の操縦に必要な部材が配設されている。乗員は、前記ハンドルバー41a及びその他の部材を操作して、車両10の走行状態(例えば、進行方向、走行速度、旋回方向、旋回半径等)を指示する。なお、前記操舵装置として、ハンドルバー41aに代えて他の装置、例えば、ステアリングホイール、ジョグダイヤル、タッチパネル、押しボタン等の装置を使用することもできる。
【0025】
なお、車輪12Fは、サスペンション装置(懸架装置)の一部である前輪フォーク17を介して搭乗部11に接続されている。前記サスペンション装置は、例えば、一般的なオートバイ、自転車等において使用されている前輪用のサスペンション装置と同様の装置であり、前記前輪フォーク17は、例えば、スプリングを内蔵したテレスコピックタイプのフォークである。そして、一般的なオートバイ、自転車等の場合と同様に、乗員によるハンドルバー41aの操作に応じて操舵輪としての車輪12Fは操舵角を変化させ、これにより、車両10の進行方向が変化する。
【0026】
具体的には、前記ハンドルバー41aは、図示されない操舵軸部材の上端に接続され、該操舵軸部材の上端は、搭乗部11が備える図示されないフレーム部材に対して回転可能に取り付けられている。前記操舵軸部材は、上端が下端よりも後方に位置するように斜めに傾斜した状態で、前記フレーム部材に取り付けられている。そして、前記操舵軸部材の上端のフレーム部材に対する回転角、すなわち、乗員がハンドルバー41aを操作して入力した操舵角指令値としてのハンドル角は、入力操舵角検出手段としてのハンドル角センサ62によって検出される。該ハンドル角センサ62は、例えば、エンコーダ等から成る。
【0027】
また、前記操舵軸部材の上端と下端との間には、操舵用アクチュエータ装置としての操舵モータ65が配設されており、該操舵モータ65が、前記ハンドル角センサ62によって検出されたハンドル角に基づいて、前記操舵軸部材の下端を回転させる。なお、該操舵軸部材の下端は、前記フレーム部材に対して回転可能に取り付けられ、かつ、前輪フォーク17の上端に接続されている。そして、前記操舵軸部材の下端の前記フレーム部材に対する回転角、すなわち、操舵モータ65が出力し、前輪フォーク17を介して車輪12Fに伝達される操舵角は、出力操舵角検出手段としての操舵角センサ63によって検出される。該操舵角センサ63は、例えば、操舵モータ65においてボディに対する回転軸の回転角を検出する回転角センサであって、レゾルバ、エンコーダ等から成る。なお、前輪である車輪12Fの車軸と後輪である左右の車輪12L及び12Rの車軸との距離、すなわち、ホイールベースはLH である。
【0028】
さらに、車輪12Fの車軸を支持する前輪フォーク17の下端には、車両10の走行速度である車速を検出する車速検出手段としての車速センサ54が配設されている。該車速センサ54は、車輪12Fの回転速度に基づいて車速を検出するセンサであり、例えば、エンコーダ等から成る。
【0029】
本実施の形態において、車両10は横加速度センサ44を有する。該横加速度センサ44は、一般的な加速度センサ、ジャイロセンサ等から成るセンサであって、車両10の横加速度、すなわち、車体の幅方向としての横方向(図3における左右方向)の加速度を検出する。
【0030】
車両10は、旋回時に車体を旋回内側に傾斜させて安定させるので、車体を傾斜させることによって、旋回時の旋回外側への遠心力と重力とが釣り合うような角度になるように制御される。このような制御を行うことによって、例えば、路面18が進行方向と垂直な方向(進行方向に対する左右方向)に傾斜していたとしても、常に車体を水平に保つことが可能になる。これにより、車体及び乗員には、見かけ上、常に重力が鉛直下向きにかかっていることになり、違和感が低減され、また、車両10の安定性が向上する。
【0031】
そこで、本実施の形態においては、傾斜する車体の横方向の加速度を検出するために、横加速度センサ44を車体に取り付け、横加速度センサ44の出力がゼロとなるようにフィードバック制御を行う。これにより、旋回時に作用する遠心力と重力とが釣り合う傾斜角まで、車体を傾斜させることができる。また、進行方向と垂直な方向に路面18が傾斜している場合でも、車体が鉛直になる傾斜角となるように制御することができる。なお、前記横加速度センサ44は、車体の幅方向の中心、すなわち、車体の縦方向軸線上に位置するように配設されている。
【0032】
しかし、横加速度センサ44が1つであると、不要加速度成分をも検出してしまうことがある。例えば、車両10の走行中、路面18の窪(くぼ)みに左右の車輪12L及び12Rのいずれか一方のみが落下する場合があり得る。この場合、車体が傾斜するので、横加速度センサ44は、周方向に変位し、周方向の加速度を検出することになる。つまり、遠心力や重力に直接由来しない加速度成分、すなわち、不要加速度成分が検出されてしまう。
【0033】
また、車両10は、例えば、車輪12L及び12Rのタイヤ部分のように弾性を備え、ばねとして機能する部分を含み、また、各部材の接続部等に不可避的なガタが含まれる。そのため、横加速度センサ44は、不可避的なガタやばねを介して車体に取り付けられていると考えられるので、ガタやばねの変位によって生じる加速度をも不要加速度成分として検出してしまう。
【0034】
このような不要加速度成分は、車体傾斜制御システムの制御性を悪化させる可能性がある。例えば、車体傾斜制御システムの制御ゲインを大きくすると、不要加速度成分に起因する制御系の振動、発散等が発生するので、応答性を向上させようとしても制御ゲインを大きくすることができなくなってしまう。
【0035】
そこで、本実施の形態においては、横加速度センサ44が複数であって、互いに異なる高さに配設されている。図1及び3に示される例において、横加速度センサ44は、第1横加速度センサ44a及び第2横加速度センサ44bの2つであって、第1横加速度センサ44aと第2横加速度センサ44bとは互いに異なる高さ位置に配設されている。第1横加速度センサ44a及び第2横加速度センサ44bの位置を適切に選択することで、効果的に不要加速度成分を取り除くことができる。
【0036】
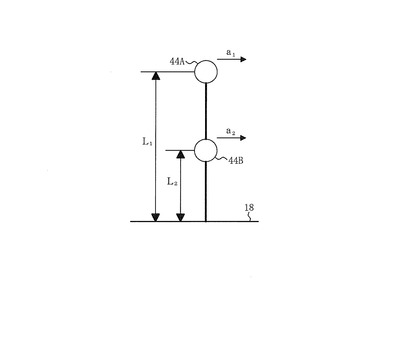
具体的には、図3(a)に示されるように、第1横加速度センサ44aは、搭乗部11の背面において、路面18からの距離、すなわち、高さがL1 の位置に配設されている。また、第2横加速度センサ44bは、搭乗部11の背面又は本体部20の上面において、路面18からの距離、すなわち、高さがL2 の位置に配設されている。なお、L1 >L2 である。そして、旋回走行時に、図3(b)に示されるように、車体を旋回内側(図において右側)に傾けた状態で旋回すると、第1横加速度センサ44aは、横方向の加速度を検出して検出値a1 を出力し、第2横加速度センサ44bは、横方向の加速度を検出して検出値a2 を出力する。なお、車体が傾く際の傾斜運動の中心、すなわち、ロール中心は、厳密には路面18よりわずかに下方に位置するが、実際上は、概略路面18と等しい位置であると考えられる。
【0037】
前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、十分に剛性の高い部材に取り付けられることが望ましい。また、L1 とL2 との差は、小さいと検出値a1 及びa2 の差が小さくなるので、十分に大きいこと、例えば、0.3〔m〕以上、とすることが望ましい。さらに、前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、リンク機構30よりも上方に配設されることが望ましい。さらに、車体がサスペンション等のばねで支持されている場合、前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、いわゆる「ばね上」に配設されることが望ましい。さらに、前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、前輪である車輪12Fの車軸と後輪である左右の車輪12L及び12Rの車軸との間に配設されることが望ましい。さらに、前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、可能な限り乗員の近くに配設されることが望ましい。さらに、前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、上側から観て進行方向に延在する車体の中心軸上に位置すること、すなわち、進行方向に関してオフセットされないことが望ましい。
【0038】
本実施の形態においては、車体の傾斜運動の角速度を検出するロールレートセンサ44c、及び、車体の旋回運動の角速度、すなわち、車体のヨー角速度を検出するヨー角速度検出手段としてのヨーレートセンサ44dが配設されている。具体的には、前記ロールレートセンサ44c及びヨーレートセンサ44dは、ともに、上側から観て進行方向に延在する車体の中心軸上に位置すること、すなわち、進行方向に関してオフセットされないことが望ましく、例えば、座席11aとフットレスト11bとの間に配設される。
【0039】
なお、前記ロールレートセンサ44cは、一般的なロールレートセンサであって、例えば、ジャイロセンサを、路面18と垂直方向の面内での回転角速度を検出することができるように取り付けたものである。また、前記ヨーレートセンサ44dは、一般的なヨーレートセンサであって、例えば、ジャイロセンサを、路面18と平行な面内での回転角速度を検出することができるように取り付けたものである。なお、三次元ジャイロセンサであれば、ロールレートセンサ44c及びヨーレートセンサ44dの機能を発揮することができる。つまり、ロールレートセンサ44c及びヨーレートセンサ44dは、それぞれ、別個に構成されたものであってもよいし、一体的に構成されたものであってもよい。
【0040】
また、本実施の形態における車両10は、制御装置の一部としての車体傾斜制御システムを有する。該車体傾斜制御システムは、一種のコンピュータシステムであり、ECU(Electronic Control Unit)等から成る傾斜制御装置及び操舵制御装置を備える。前記傾斜制御装置は、プロセッサ等の演算手段、磁気ディスク、半導体メモリ等の記憶手段、入出力インターフェイス等を備え、リンク角センサ25a、第1横加速度センサ44a、第2横加速度センサ44b、ロールレートセンサ44c、ヨーレートセンサ44d、車速センサ54及びリンクモータ25に接続されている。そして、前記傾斜制御装置は、リンクモータ25を作動させるためのトルク指令値を出力する。また、前記操舵制御装置は、プロセッサ等の演算手段、磁気ディスク、半導体メモリ等の記憶手段、入出力インターフェイス等を備え、ハンドル角センサ62、操舵角センサ63、車速センサ54及び操舵モータ65に接続されている。そして、前記操舵制御装置は、操舵モータ65を作動させるための制御パルスを出力する。なお、前記傾斜制御装置と操舵制御装置とは相互に接続されている。また、前記傾斜制御装置及び操舵制御装置は、必ずしも別個に構成される必要はなく、一体的に構成されたものであってもよい。
【0041】
前記傾斜制御装置は、旋回走行の際には、フィードバック制御及びフィードフォワード制御を行い、車体の傾斜角度が、横加速度センサ44が検出する横加速度の値がゼロとなる角度になるように、リンクモータ25を作動させる。つまり、旋回外側への遠心力と重力とが釣り合って、横方向の加速度成分がゼロとなる角度になるように、車体の傾斜角度を制御する。これにより、車体及び搭乗部11に搭乗している乗員には、車体の縦方向軸線と平行な方向の力が作用することとなる。したがって、車体の安定を維持することができ、また、旋回性能を向上させることができる。
【0042】
また、傾斜方向への外乱を受けたときには、車体の傾斜角度の変化のうちの外乱による部分を抽出し、残余の部分に対しては通常モードで車体の傾斜角度を制御するとともに、抽出した部分に対しては外乱対応モードで車体の傾斜角度を制御する。したがって、外乱を受けたときでも、車体の安定を維持することができる。また、乗員が違和感を感じることがなく、乗り心地が向上する。
【0043】
さらに、本実施の形態においては、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。つまり、乗員がハンドルバー41aの操作を開始した直後の時期に、ハンドルバー41aの操作によって入力した操舵方向に車体の重心を移動させ、これにより、旋回方向内側に向けた加速度を発生させる。なお、後述される操舵制御部66は、乗員がハンドルバー41aの操作を開始した直後の時期に、ハンドルバー41aの操作によって入力した操舵方向と反対の方向に操舵輪としての車輪12Fの操舵角を変化させる、すなわち、カウンタステア操作を実行することによって、ハンドルバー41aの操作により入力した操舵方向に車体の重心を移動させる。
【0044】
より具体的には、前記操舵制御装置は、ハンドル角の加速度の値に比例した値をハンドル角の値から減算して操舵角の目標値を設定する。これにより、操舵初期(乗員がハンドルバー41aを操作し始めた時、つまり、ハンドルを切り始めた時)に、操舵方向(ハンドルを切った方向)と反対の方向に、操舵輪としての車輪12Fの操舵角が変化する。すなわち、逆ハンドル操作、又は、カウンタステア操作が行われる。そのため、操舵初期には、乗員の意図した旋回方向と逆の旋回方向への旋回が開始されるので、該旋回によって発生する遠心力が、乗員の意図した旋回方向内側に車体を傾斜させる力として作用するので、この力を車体傾斜制御に利用することにより、スムーズに車体を旋回方向内側に傾斜させることができる。つまり、操舵初期に、旋回方向内側に向けて車体の重心を移動させることができるので、スムーズに車体を旋回方向内側に傾斜させることができる。
【0045】
このような操舵制御を行うことなしに車体傾斜制御を行うと、例えば、トレッド(左右の車輪12L及び12Rの接地点間の距離)が狭い場合や、車両10の重心位置が高い場合や、操舵速度(ハンドルを切る速度)が速い場合には、旋回によって発生する遠心力が旋回方向外側に車体を傾斜させる力として作用するので、旋回方向内側に車体を傾斜させにくく、車両10の安定性が低下することがある。もっとも、操舵輪としての車輪12Fの操舵角の速度又は加速度を低下させれば、遠心力を抑制して、スムーズに車体を旋回方向内側に傾斜させることができるので、車体の安定性を維持することができる。しかし、この場合、車両10の運動性能が低下するので、操縦性が悪化するとともに、危機回避性能も低下してしまう。
【0046】
これに対して、本実施の形態においては、前述のように、操舵初期に、いわゆる、カウンタステア操作が行われたのと同様に、操舵方向と反対の方向に車輪12Fの操舵角が変化する。これにより、操舵初期に、旋回方向内側に向けて車体の重心を移動させることができ、スムーズに車体を旋回方向内側に傾斜させることができるので、操縦性や危機回避性能を犠牲とすることなしに、車体の安定性を維持することができる。
【0047】
次に、前記車体傾斜制御システムの構成について説明する。
【0048】
図4は本発明の第1の実施の形態における車体傾斜制御システムの構成を示すブロック図である。
【0049】
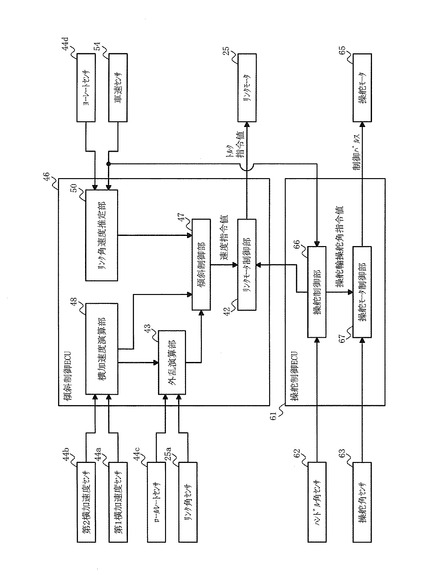
図において、46は傾斜制御装置としての傾斜制御ECUであり、リンク角センサ25a、第1横加速度センサ44a、第2横加速度センサ44b、ロールレートセンサ44c、ヨーレートセンサ44d、車速センサ54及びリンクモータ25に接続されている。また、前記傾斜制御ECU46は、横加速度演算部48、リンク角速度推定部50、外乱演算部43、傾斜制御部47及びリンクモータ制御部42を備える。
【0050】
また、61は操舵制御装置としての操舵制御ECUであり、ハンドル角センサ62、操舵角センサ63、車速センサ54及び操舵モータ65に接続されている。さらに、前記操舵制御ECU61は、操舵制御部66及び操舵モータ制御部67を備える。
【0051】
ここで、前記横加速度演算部48は、第1横加速度センサ44a及び第2横加速度センサ44bが検出した横加速度に基づいて合成横加速度を算出する。また、前記リンク角速度推定部50は、ヨーレートセンサ44dが検出したヨー角速度としてのヨーレート、及び、車速センサ54が検出した車速に基づいてリンク角速度予測値を算出する。さらに、前記外乱演算部43は、ロールレートセンサ44cが検出した車体の傾斜運動の角速度としてのロールレート、及び、リンク角センサ25aが検出したリンク角に基づいて外乱分のロールレートを算出する。
【0052】
そして、前記傾斜制御部47は、横加速度演算部48が算出した合成横加速度、リンク角速度推定部50が算出したリンク角速度予測値、及び、外乱演算部43が算出した外乱分のロールレートに基づいて、制御値としての速度指令値を演算して出力する。さらに、前記リンクモータ制御部42は、傾斜制御部47が出力した速度指令値、及び、操舵制御部66が出力した操舵輪操舵角指令値に基づいてリンクモータ25を作動させるための制御値としてのトルク指令値を出力する。
【0053】
また、前記操舵制御部66は、ハンドル角センサ62が検出したハンドル角、及び、車速センサ54が検出した車速に基づいて、制御値としての操舵輪操舵角指令値を演算して出力する。前記操舵モータ制御部67は、操舵角センサ63が検出した操舵角、及び、操舵制御部66が出力した操舵輪操舵角指令値に基づいて操舵モータ65を作動させるための制御値としての制御パルスを出力する。
【0054】
次に、前記構成の車両10の動作について説明する。まず、旋回走行における車体傾斜制御処理の動作の一部である横加速度演算処理の動作について説明する。
【0055】
図5は本発明の第1の実施の形態における制御系のブロック図、図6は本発明の第1の実施の形態における旋回走行時の車体の傾斜動作を説明する力学モデルを示す図、図7は本発明の第1の実施の形態における横加速度演算処理の動作を示すフローチャートである。
【0056】
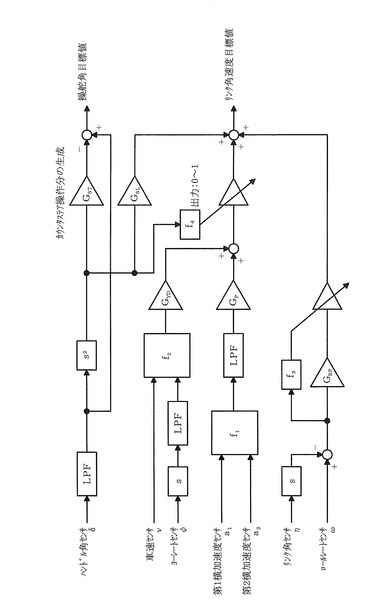
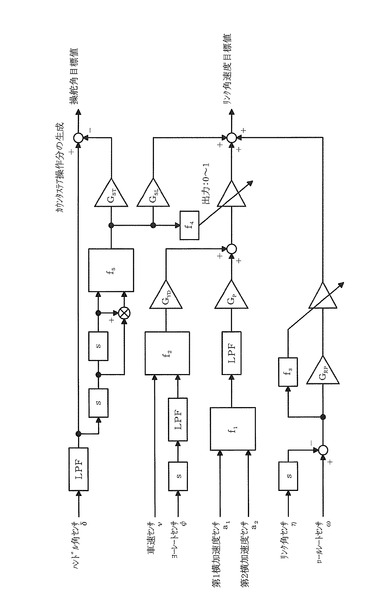
本実施の形態における車体傾斜制御処理では、図5に示されるような傾斜制御ECU46による傾斜制御と操舵制御ECU61による操舵制御とを組み合わせた制御が行われる。なお、傾斜制御ECU46による傾斜制御は、フィードバック制御とフィードフォワード制御とを組み合わせた制御である。
【0057】
図5において、f1 は後述される式(6)で表される伝達関数であり、GP 、GRP、GYD、GST及びGSLは比例制御動作の制御ゲインであり、LPFはローパスフィルタであり、sは微分要素である。また、f2 は後述される式(10)で表されるリンク角速度予測値であり、f3 はロールレートゲインであり、f4 は後述される式(26)で表されるカウンタステア操作の影響を消すための関数である。
【0058】
旋回走行が開始されると、車体傾斜制御システムは車体傾斜制御処理を開始する。姿勢制御が行われることで、車両10は、リンク機構30によって、旋回走行時には、図3(b)に示されるように、車体を旋回内側(図において右側)に傾けた状態で旋回する。また、旋回走行時には、旋回外側への遠心力が車体に作用するとともに、車体を旋回内側に傾けたことによって重力の横方向成分が発生する。そして、横加速度演算部48は、横加速度演算処理を実行し、合成横加速度aを算出して傾斜制御部47に出力する。すると、該傾斜制御部47は、フィードバック制御を行い、合成横加速度aの値がゼロとなるような制御値としての速度指令値を出力する。そして、リンクモータ制御部42は、傾斜制御部47が出力した速度指令値に基づいてトルク指令値をリンクモータ25に出力する。
【0059】
なお、車体傾斜制御処理は、車両10の電源が投入されている間、車体傾斜制御システムによって繰り返し所定の制御周期TS (例えば、5〔ms〕)で実行される処理であり、旋回時において、旋回性能の向上と乗員の快適性の確保とを図る処理である。
【0060】
また、図6において、44Aは車体において第1横加速度センサ44aの配設された位置を示す第1センサ位置であり、44Bは車体において第2横加速度センサ44bの配設された位置を示す第2センサ位置である。
【0061】
第1横加速度センサ44a及び第2横加速度センサ44bが検出してその検出値を出力する加速度は、〈1〉旋回時に車体に作用する遠心力、〈2〉車体を旋回内側に傾けたことによって発生する重力の横方向成分、〈3〉左右の車輪12L及び12Rのいずれか一方のみが路面18の窪みに落下することによる車体の傾斜、ガタやばねの変位等により第1横加速度センサ44a及び第2横加速度センサ44bが周方向に変位することによって生じる加速度、並びに、〈4〉リンクモータ25の作動又はその反作用により第1横加速度センサ44a及び第2横加速度センサ44bが周方向に変位することによって生じる加速度、の4つであると考えられる。これら4つの加速度のうち、前記〈1〉及び〈2〉は、第1横加速度センサ44a及び第2横加速度センサ44bの高さ、すなわち、L1 及びL2 と無関係である。一方、前記〈3〉及び〈4〉は、周方向に変位することによって生じる加速度であるから、ロール中心からの距離に比例する、すなわち、概略L1 及びL2 に比例する。
【0062】
ここで、第1横加速度センサ44a及び第2横加速度センサ44bが検出してその検出値を出力する〈3〉の加速度をaX1及びaX2とし、第1横加速度センサ44a及び第2横加速度センサ44bが検出してその検出値を出力する〈4〉の加速度をaM1及びaM2とする。また、第1横加速度センサ44a及び第2横加速度センサ44bが検出してその検出値を出力する〈1〉の加速度をaT とし、第1横加速度センサ44a及び第2横加速度センサ44bが検出してその検出値を出力する〈2〉の加速度をaG とする。なお、前記〈1〉及び〈2〉は、第1横加速度センサ44a及び第2横加速度センサ44bの高さに無関係なので、第1横加速度センサ44a及び第2横加速度センサ44bの検出値は等しい。
【0063】
そして、左右の車輪12L及び12Rのいずれか一方のみが路面18の窪みに落下することによる車体の傾斜、ガタやばねの変位等による周方向の変位の角速度をωR とし、その角加速度をωR ’とする。また、リンクモータ25の作動又はその反作用による周方向の変位の角速度をωM とし、その角加速度をωM ’とする。なお、角速度ωM 又は角加速度ωM ’は、リンク角センサ25aの検出値から取得することができる。
【0064】
すると、aX1=L1 ωR ’、aX2=L2 ωR ’、aM1=L1 ωM ’、aM2=L2 ωM ’となる。
【0065】
また、第1横加速度センサ44a及び第2横加速度センサ44bが検出して出力する加速度の検出値をa1 及びa2 とすると、a1 及びa2 は、4つの加速度〈1〉〜〈4〉の合計であるから、次の式(1)及び(2)で表される。
a1 =aT +aG +L1 ωR ’+L1 ωM ’ ・・・式(1)
a2 =aT +aG +L2 ωR ’+L2 ωM ’ ・・・式(2)
そして、式(1)から式(2)を減算すると、次の式(3)を得ることができる。
a1 −a2 =(L1 −L2 )ωR ’+(L1 −L2 )ωM ’ ・・・式(3)
ここで、L1 及びL2 の値は、第1横加速度センサ44a及び第2横加速度センサ44bの高さであるから既知である。また、ωM ’の値は、リンクモータ25の角速度ωM の微分値であるから既知である。すると、前記式(3)の右辺においては、第1項のωR ’の値のみが未知であり、他の値はすべて既知である。したがって、第1横加速度センサ44a及び第2横加速度センサ44bの検出値a1 及びa2 から、ωR ’の値を得ることが可能である。つまり、第1横加速度センサ44a及び第2横加速度センサ44bの検出値a1 及びa2 に基づいて、不要加速度成分を取り除くことができる。
【0066】
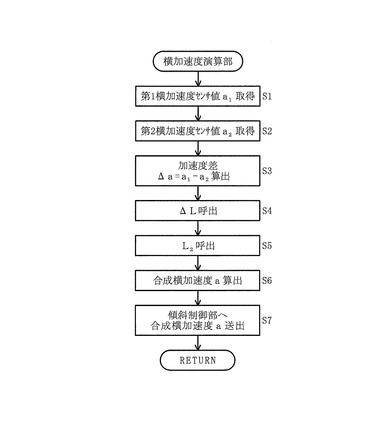
車体傾斜制御システムが車体傾斜制御処理を開始すると、横加速度演算部48は、横加速度演算処理を開始し、まず、第1横加速度センサ値a1 を取得するとともに(ステップS1)、第2横加速度センサ値a2 を取得する(ステップS2)。そして、横加速度演算部48は、加速度差Δaを算出する(ステップS3)。該Δaは次の式(4)によって表される。
Δa=a1 −a2 ・・・式(4)
続いて、横加速度演算部48は、ΔL呼出を行うとともに(ステップS4)、L2 呼出を行う(ステップS5)。前記ΔLは次の式(5)によって表される。
ΔL=L1 −L2 ・・・式(5)
続いて、横加速度演算部48は、合成横加速度aを算出する(ステップS6)。なお、合成横加速度aは、横加速度センサ44が1つである場合における横加速度センサ値aに相当する値であって、第1横加速度センサ値a1 と第2横加速度センサ値a2 とを合成した値であり、次の式(6)及び(7)によって得られる。
a=a2 −(L2 /ΔL)Δa ・・・式(6)
a=a1 −(L1 /ΔL)Δa ・・・式(7)
理論上は、式(6)によっても式(7)によっても、同じ値を得ることができるが、周方向の変位によって生じる加速度はロール中心からの距離に比例するので、実際上は、ロール中心により近い方の横加速度センサ44、すなわち、第2横加速度センサ44bの検出値であるa2 を基準にすることが望ましい。そこで、本実施の形態においては、式(6)によって合成横加速度aを算出することとする。
【0067】
最後に、横加速度演算部48は、傾斜制御部47へ合成横加速度aを送出して(ステップS7)、横加速度演算処理を終了する。
【0068】
このように、本実施の形態においては、第1横加速度センサ44aと第2横加速度センサ44bとを互いに異なる高さ位置に配設し、第1横加速度センサ値a1 と第2横加速度センサ値a2 とを合成した合成横加速度aを算出し、該合成横加速度aの値がゼロとなるように、フィードバック制御を行って車体の傾斜角度を制御する。
【0069】
これにより、不要加速度成分を取り除くことができるので、路面状況の影響を受けることがなく、制御系の振動、発散等の発生を防止することができ、車体傾斜制御システムの制御ゲインを大きくして制御の応答性を向上させることができる。
【0070】
なお、本実施の形態においては、横加速度センサ44が2つである場合について説明したが、横加速度センサ44は、複数であって互いに異なる高さに配設されていれば、3つ以上であってもよく、いくつであってもよい。
【0071】
次に、旋回走行におけるリンク角速度を推定するリンク角速度推定処理の動作について説明する。
【0072】
図8は本発明の第1の実施の形態におけるリンク角速度推定処理の動作を示すフローチャート、図9は本発明の第1の実施の形態におけるヨーレートの微分処理のサブルーチンを示すフローチャート、図10は本発明の第1の実施の形態におけるフィルタ処理のサブルーチンを示すフローチャートである。
【0073】
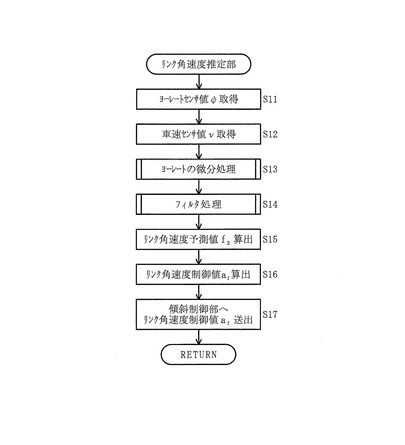
リンク角速度推定部50は、リンク角速度推定処理を開始すると、まず、ヨーレートセンサ44dが検出したヨーレートの値であるヨーレートセンサ値ψを取得するとともに(ステップS11)、車速センサ54が検出した車速の値である車速センサ値νを取得する(ステップS12)。
【0074】
そして、リンク角速度推定部50は、ヨーレートの微分処理を実行し(ステップS13)、Δψを算出する。該Δψは、ヨーレートを時間微分した値であり、ヨー角加速度に相当する。
【0075】
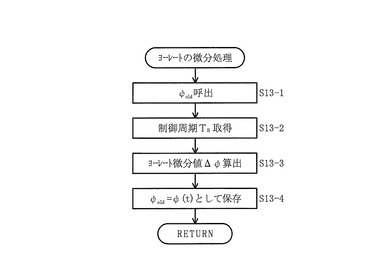
ヨーレートの微分処理において、リンク角速度推定部50は、まず、ψold 呼出を行う(ステップS13−1)。なお、ψold は、前回の車体傾斜制御処理実行時に保存されたψ(t)の値である。なお、初期設定においては、ψold =0とされている。
【0076】
続いて、リンク角速度推定部50は、制御周期TS を取得する(ステップS13−2)。
【0077】
続いて、リンク角速度推定部50は、ヨーレート微分値Δψを算出する(ステップS13−3)。Δψは、次の式(8)によって算出される。
Δψ=(ψ(t)−ψold )/TS ・・・式(8)
そして、リンク角速度推定部50は、ψold =ψ(t)として保存し(ステップS13−4)、ヨーレートの微分処理を終了する。
【0078】
続いて、リンク角速度推定部50は、ヨーレート微分値Δψに対して、フィルタ処理を実行する(ステップS14)。
【0079】
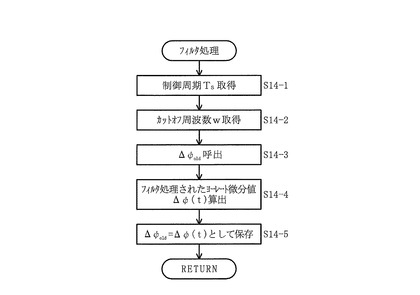
フィルタ処理において、リンク角速度推定部50は、まず、制御周期TS を取得する(ステップS14−1)。
【0080】
続いて、リンク角速度推定部50は、カットオフ周波数wを取得する(ステップS14−2)。
【0081】
続いて、リンク角速度推定部50は、Δψold 呼出を行う(ステップS14−3)。なお、Δψold は、前回の車体傾斜制御処理実行時に保存されたΔψ(t)の値である。
【0082】
続いて、リンク角速度推定部50は、フィルタ処理されたヨーレート微分値Δψ(t)を算出する(ステップS14−4)。Δψ(t)は、次の式(9)によって算出される。
Δψ(t)=Δψold /(1+TS w)+TS wψ/(1+TS w) ・・・式(9)
該式(9)は、バンドパスフィルタとして一般的に使用されるIIR(Infinite Impulse Response)フィルタの式であるが、単純に一次遅れ系のローパスフィルタを用いてもよい。IIRフィルタとしては、例えば、チェビシェフII型フィルタを使用してもよいし、その他のフィルタを使用してもよい。また、一般的に使用されるFIR(Finite Impulse Response)フィルタを使用してもよい。さらに、バンドパスフィルタのカットオフ周波数(−3〔dB〕周波数)は、10〔Hz〕以下であることが望ましく、数〔Hz〕であることがより望ましい。
【0083】
そして、リンク角速度推定部50は、Δψold =Δψ(t)として保存し(ステップS14−5)、フィルタ処理を終了する。つまり、今回の車体傾斜制御処理実行時に算出したΔψ(t)の値をΔψold として、記憶手段に保存する。
【0084】
続いて、リンク角速度推定部50は、リンク角速度予測値f2 を算出する(ステップS15)。ここで、重力をgとすると、リンク角速度予測値f2 は、次の式(10)によって算出される。
f2 =dη/dt=(ν/g)(dψ/dt) ・・・式(10)
前述のように、リンク角センサ25aは、中央縦部材21に対する上側の横リンクユニット31Uの角度の変化、すなわち、リンク角の変化を検出する。ここで、リンク角をηとし、旋回時における車体の傾斜角が、横加速度としての遠心力a0 と重力gとが釣り合うように制御されているものとすると、路面が水平であれば、遠心力a0 と重力gとの間には、次の式(11)で表される関係が成立する。
a0 cos η=gsin η ・・・式(11)
該式(11)から、次の式(12)が導出される。
a0 /g=sin η/cos η=tan η ・・・式(12)
さらに、該式(12)から、次の式(13)が導出される。
a0 =gtan η ・・・式(13)
一方、ヨーレートがψであり、旋回半径がrであるとすると、車速ν及び旋回時に車体に作用する横加速度としての遠心力a0 は次の式(14)及び(15)によって表される。
ν=rψ ・・・式(14)
a0 =rψ2 =νψ ・・・式(15)
そして、該式(15)と前記式(13)とから、次の式(16)が導出される。
tan η=νψ/g ・・・式(16)
さらに、tan η≒ηと近似することができるとともに、車速νの変化がリンク角ηの変化と比較して十分に遅いので、車速νを定数とみなすことができるとすると、前記式(16)から、前記式(10)を得ることができる。
【0085】
続いて、リンク角速度推定部50は、リンク角速度制御値af を算出する(ステップS16)。リンク角速度制御値af は、次の式(17)によって算出される。
af =Adη/dt ・・・式(17)
ここで、Aは、0〜1の任意の値であり、車両10の構造に応じて決定されるチューニング定数である。
【0086】
最後に、リンク角速度推定部50は、傾斜制御部47へリンク角速度制御値af を送出して(ステップS17)、リンク角速度推定処理を終了する。
【0087】
次に、リンクモータ制御部42へ速度指令値を出力するための傾斜制御処理の動作について説明する。
【0088】
図11は本発明の第1の実施の形態における傾斜制御処理の動作を示すフローチャートである。
【0089】
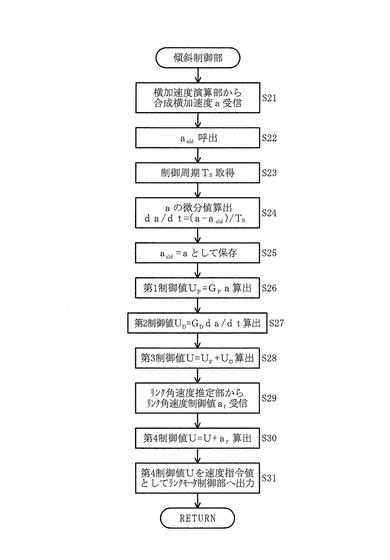
傾斜制御処理において、傾斜制御部47は、まず、横加速度演算部48から合成横加速度aを受信する(ステップS21)。
【0090】
続いて、傾斜制御部47は、aold 呼出を行う(ステップS22)。aold は、前回の車体傾斜制御処理実行時に保存された合成横加速度aである。なお、初期設定においては、aold =0とされている。
【0091】
続いて、傾斜制御部47は、制御周期TS を取得し(ステップS23)、aの微分値を算出する(ステップS24)。ここで、aの微分値をda/dtとすると、該da/dtは次の式(18)によって算出される。
da/dt=(a−aold )/TS ・・・式(18)
そして、傾斜制御部47は、aold =aとして保存する(ステップS25)。つまり、今回の車体傾斜制御処理実行時に取得した横加速度センサ値aをaold として、記憶手段に保存する。
【0092】
続いて、傾斜制御部47は、第1制御値UP を算出する(ステップS26)。ここで、比例制御動作の制御ゲイン、すなわち、比例ゲインをGP とすると、第1制御値UP は次の式(19)によって算出される。
UP =GP a ・・・式(19)
続いて、傾斜制御部47は、第2制御値UD を算出する(ステップS27)。ここで、微分制御動作の制御ゲイン、すなわち、微分時間をGD とすると、第2制御値UD は次の式(20)によって算出される。
UD =GD da/dt ・・・式(20)
続いて、傾斜制御部47は、第3制御値Uを算出する(ステップS28)。該第3制御値Uは、第1制御値UP と第2制御値UD との合計であり、次の式(21)によって算出される。
U=UP +UD ・・・式(21)
第3制御値Uを算出すると、傾斜制御部47は、リンク角速度推定部50からリンク角速度制御値af を受信する(ステップS29)。
【0093】
続いて、傾斜制御部47は、第4制御値Uを算出する(ステップS30)。該第4制御値Uは、第3制御値Uとリンク角速度制御値af との合計であり、次の式(22)によって算出される。
U=U+af ・・・式(22)
最後に、傾斜制御部47は、第4制御値Uを速度指令値としてリンクモータ制御部42へ出力して(ステップS31)、傾斜制御処理を終了する。
【0094】
次に、旋回走行における車体制御動作の一部である操舵制御処理の動作について説明する。
【0095】
図12は本発明の第1の実施の形態における操舵制御処理の動作を示すフローチャートである。
【0096】
操舵制御処理においては、ハンドル角センサ値δを取得した後、車速νに応じて関数を作用させてもよい。例えば、一般的に、車速νが高くなると、ハンドルを大きく切っても操舵輪の操舵角を大きくする必要がなくなる。そのため、操舵制御処理において演算に使用するハンドル角センサ値δは、ハンドル角センサ62から取得した後に車速νと反比例するような関数を乗じることで、決定することもできる。
【0097】
また、ハンドル角センサ値δによって車体のヨーレートを決定することもできる。これは、車速νとは無関係に、あるハンドル角センサ値δのときはあるヨーレートとなるようにフィードバック制御を構成するものである。
【0098】
これらは、いずれも、ステアバイワイヤを行うときに採用される手法である。
【0099】
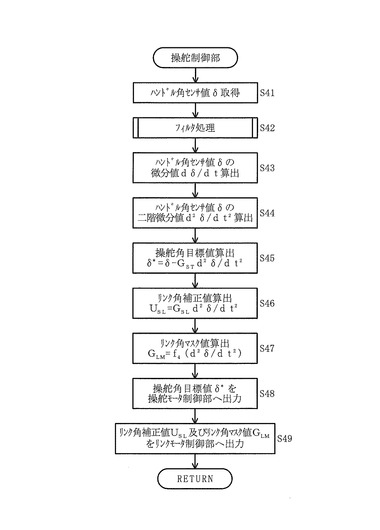
本実施の形態における操舵制御部66は、操舵制御処理を開始すると、まず、ハンドル角センサ62が検出したハンドル角の値であるハンドル角センサ値δを取得する(ステップS41)。前記ハンドル角は、乗員がハンドルバー41aを操作して入力した操舵角指令値である。
【0100】
続いて、操舵制御部66は、ハンドル角センサ値δに対して、フィルタ処理を実行する(ステップS42)。該フィルタ処理は、前記リンク角速度推定処理におけるフィルタ処理と同様の、ローパスフィルタによる処理であり、バンドパスフィルタとして一般的に使用されるIIRフィルタ又はFIRフィルタを使用することができるし、一次遅れ系の単純なローパスフィルタを用いてもよい。
【0101】
続いて、操舵制御部66は、ハンドル角センサ値δの微分値dδ/dtを算出する(ステップS43)。ここで、ハンドル角センサ値δの微分値dδ/dtは、ハンドル角の角速度を表す。
【0102】
続いて、操舵制御部66は、ハンドル角センサ値δの二階微分値d2 δ/dt2 を算出する(ステップS44)。ここで、ハンドル角センサ値δの二階微分値d2 δ/dt2 は、ハンドル角の角加速度を表す。
【0103】
続いて、操舵制御部66は、操舵角目標値δ* を算出する(ステップS45)。ここで、カウンタステア操作に相当する制御ゲインをGSTとすると、操舵角目標値δ* は次の式(23)によって算出される。
δ* =δ−GSTd2 δ/dt2 ・・・式(23)
続いて、操舵制御部66は、リンク角補正値USLを算出する(ステップS46)。ここで、ハンドル角に応じてリンク角を制御する制御ゲイン、つまり、ハンドルを切る方向に応じて車体を旋回方向内側に傾斜させるようにリンク角を制御する制御ゲインをGSLとすると、リンク角補正値USLは次の式(24)によって算出される。
USL=GSLd2 δ/dt2 ・・・式(24)
続いて、操舵制御部66は、リンク角マスク値GLMを算出する(ステップS47)。ここで、カウンタステア操作の影響を消すための関数をf4 とすると、リンク角マスク値GLMは次の式(25)によって算出される。
GLM=f4 (d2 δ/dt2 ) ・・・式(25)
なお、f4 は、カウンタステア操作時に、横加速度に基づいた傾斜制御処理の影響を排除するための関数である。カウンタステア操作によって、乗員の意図した旋回方向と逆の旋回方向への旋回が開始されるので、該旋回により発生する遠心力が、乗員の意図した旋回方向の内側に車体を傾斜させる方向の横加速度として検出される。そのため、該横加速度に基づいた傾斜制御処理が行われると、乗員の意図した旋回方向の外側に車体を傾斜させることになってしまう。したがって、カウンタステア操作時には、横加速度に基づいた傾斜制御処理の影響を排除する必要がある。
【0104】
そこで、f4 は、入力が実際に取り得る最大値のときに0を出力するような関数として構成される。なお、出力は0〜1である。例えば、入力をxとし、該xが実際に取り得る最大値をXMAX とすると、出力yは、次の式(26)によって得ることができる。
y=−1/XMAX ・|x|+1 ・・・式(26)
続いて、操舵制御部66は、算出した操舵角目標値δ* を操舵モータ制御部67へ出力する(ステップS48)。
【0105】
最後に、操舵制御部66は、算出したリンク角補正値USL及びリンク角マスク値GLMをリンクモータ制御部42へ出力して(ステップS49)、操舵制御処理を終了する。
【0106】
次に、リンクモータ25へトルク指令値を出力するためのリンクモータ制御処理の動作について説明する。
【0107】
図13は本発明の第1の実施の形態におけるリンクモータ制御処理の動作を示すフローチャートである。
【0108】
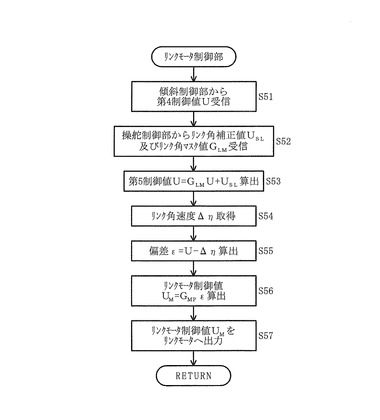
リンクモータ制御処理において、リンクモータ制御部42は、まず、傾斜制御部47から第4制御値Uを受信する(ステップS51)。
【0109】
続いて、リンクモータ制御部42は、操舵制御部66からリンク角補正値USL及びリンク角マスク値GLMを受信する(ステップS52)。
【0110】
続いて、リンクモータ制御部42は、第5制御値Uを算出する(ステップS53)。該第5制御値Uは、第4制御値Uとリンク角補正値USL及びリンク角マスク値GLMとに基づいて、次の式(27)によって算出される。
U=GLMU+USL ・・・式(27)
続いて、リンクモータ制御部42は、リンク角の角速度、すなわち、リンク角速度Δηを取得する(ステップS54)。該リンク角速度Δηは、リンク角センサ25aが検出したリンク角センサ値ηを取得し、該リンク角センサ値ηを時間微分することによって算出される。また、リンクモータ制御部42は、リンク角速度Δηの値を外乱演算部43から取得することもできる。
【0111】
続いて、リンクモータ制御部42は、制御誤差としての偏差を算出する(ステップS55)。ここで、偏差をεとすると、該εは、次の式(28)によって算出される。
ε=U−Δη ・・・式(28)
なお、Uは第5制御値Uである。
【0112】
続いて、リンクモータ制御部42は、リンクモータ25を作動させるためのトルク指令値としてのリンクモータ制御値を算出する(ステップS56)。ここで、リンクモータ制御値をUM とすると、該UM は次の式(29)によって算出される。
UM =GMPε ・・・式(29)
なお、GMPはモータ制御比例ゲインであって、GMPの値は、実験等に基づいて設定された値であり、あらかじめ記憶手段に格納されている。
【0113】
最後に、リンクモータ制御部42は、リンクモータ制御値UM をリンクモータ25へ出力して(ステップS57)、リンクモータ制御処理を終了する。
【0114】
ここでは、リンクモータ制御処理が比例制御、すなわち、P制御であるものとして説明したが、PID制御であってもよい。
【0115】
このように、本実施の形態においては、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。つまり、乗員がハンドルバー41aの操作を開始した直後の時期に、ハンドルバー41aの操作によって入力した操舵方向に車体の重心を移動させ、これにより、旋回方向内側に向けた加速度を発生させる。なお、操舵制御部66は、乗員がハンドルバー41aの操作を開始した直後の時期に、ハンドルバー41aの操作によって入力した操舵方向と反対の方向に操舵輪としての車輪12Fの操舵角を変化させる、すなわち、カウンタステア操作を実行することによって、ハンドルバー41aの操作により入力した操舵方向に車体の重心を移動させる。
【0116】
これにより、操舵初期に、旋回方向内側に向けて車体の重心を移動させることができ、スムーズに車体を旋回方向内側に傾斜させることができるので、操縦性や危機回避性能を犠牲とすることなしに、車体の安定性を維持することができる。
【0117】
次に、本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同じ構造を有するものについては、同じ符号を付与することによってその説明を省略する。また、前記第1の実施の形態と同じ動作及び同じ効果についても、その説明を省略する。
【0118】
図14は本発明の第2の実施の形態における制御系のブロック図、図15は本発明の第2の実施の形態における操舵制御処理の動作を示すフローチャートである。
【0119】
本実施の形態における車体傾斜制御処理では、図14に示されるような傾斜制御ECU46による傾斜制御と操舵制御ECU61による操舵制御とを組み合わせた制御が行われる。図14において、f5 は後述される式(30)で表されるカウンタステア操作における操舵角の計算値、すなわち、逆操舵計算値を算出するための関数である。なお、その他の点については、前記第1の実施の形態で説明した図5と同様であるので、その説明を省略する。
【0120】
また、本実施の形態における横加速度演算処理、リンク角速度推定処理、傾斜制御処理及びリンクモータ制御処理の動作については、前記第1の実施の形態と同様であるので、その説明を省略し、ここでは、本実施の形態における操舵制御処理の動作についてのみ説明する。
【0121】
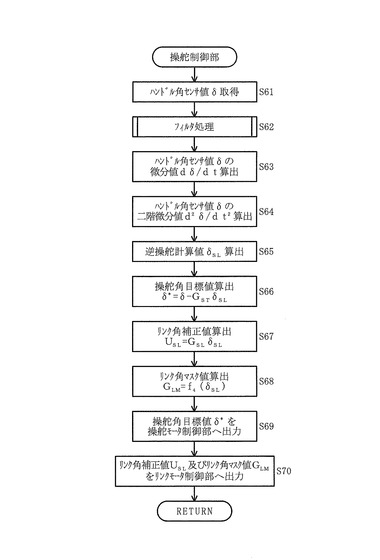
操舵制御部66は、操舵制御処理を開始すると、ハンドル角センサ62が検出したハンドル角の値であるハンドル角センサ値δを取得し(ステップS61)、ハンドル角センサ値δに対して、フィルタ処理を実行し(ステップS62)、ハンドル角センサ値δの微分値dδ/dtを算出し(ステップS63)、ハンドル角センサ値δの二階微分値d2 δ/dt2 を算出する(ステップS64)。ここまでの動作については、前記第1の実施の形態における操舵制御処理のステップS41〜S44の動作と同様である。
【0122】
続いて、操舵制御部66は逆操舵計算値δSLを算出する(ステップS65)。該逆操舵計算値δSLは、関数f5 に従って算出され、具体的には、次の式(30)によって得ることができる。
【0123】
【数1】

【0124】
これにより、乗員によるハンドルバー41aの操作、すなわち、操舵初期にのみカウンタステア操作を発生させ、操舵終期にはカウンタステア操作を発生させないようにすることができる。
【0125】
続いて、操舵制御部66は、操舵角目標値δ* を算出する(ステップS66)。ここで、操舵角目標値δ* は次の式(31)によって算出される。
δ* =δ−GSTδSL ・・・式(31)
続いて、操舵制御部66は、リンク角補正値USLを算出する(ステップS67)。ここで、リンク角補正値USLは次の式(32)によって算出される。
USL=GSLδSL ・・・式(32)
続いて、操舵制御部66は、リンク角マスク値GLMを算出する(ステップS68)。ここで、リンク角マスク値GLMは次の式(33)によって算出される。
GLM=f4 (δSL) ・・・式(33)
続いて、操舵制御部66は、算出した操舵角目標値δ* を操舵モータ制御部67へ出力する(ステップS69)。
【0126】
最後に、操舵制御部66は、算出したリンク角補正値USL及びリンク角マスク値GLMをリンクモータ制御部42へ出力して(ステップS70)、操舵制御処理を終了する。
【0127】
このように、本実施の形態においては、操舵指令情報に含まれる操舵角の微分値を使用する。具体的には、関数f5 に従って算出された逆操舵計算値δSLを使用する。
【0128】
これにより、乗員によるハンドルバー41aの操作、すなわち、操舵初期にのみカウンタステア操作を発生させ、操舵終期にはカウンタステア操作を発生させないようにすることができる。
【0129】
次に、本発明の第3の実施の形態について説明する。なお、第1及び第2の実施の形態と同じ構造を有するものについては、同じ符号を付与することによってその説明を省略する。また、前記第1及び第2の実施の形態と同じ動作及び同じ効果についても、その説明を省略する。
【0130】
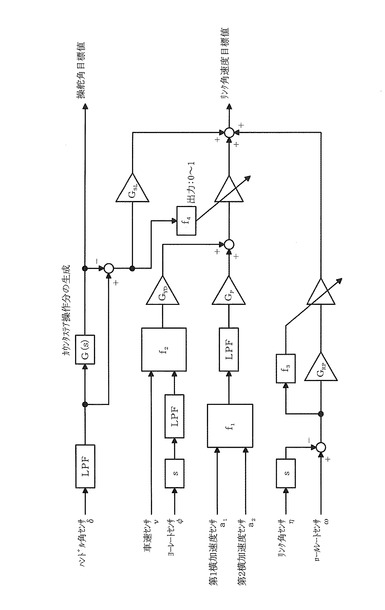
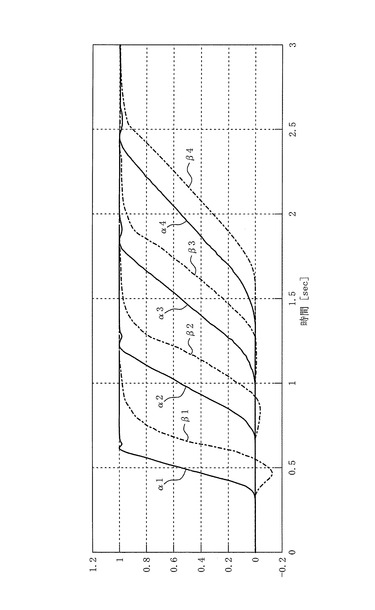
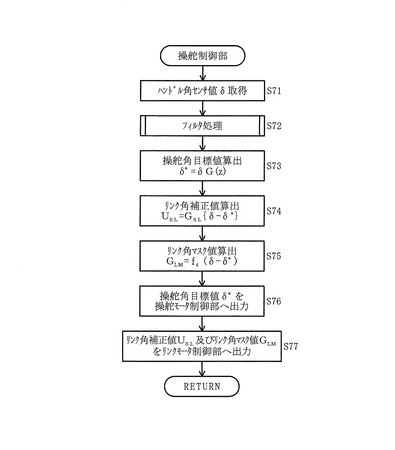
図16は本発明の第3の実施の形態における制御系のブロック図、図17は本発明の第3の実施の形態における伝達関数の入力と出力との関係を示す図、図18は本発明の第3の実施の形態における操舵制御処理の動作を示すフローチャートである。
【0131】
本実施の形態における車体傾斜制御処理では、図16に示されるような傾斜制御ECU46による傾斜制御と操舵制御ECU61による操舵制御とを組み合わせた制御が行われる。図16において、G(s)は、カウンタステア操作も含めた操舵操作のゲインを算出するための伝達関数であり、例えば、ラプラス変数sを用いて表現され、次の式(34)で表される。
{1−0.1s}/{1+0.11s+0.001s2 } ・・・式(34)
なお、該式(34)は、次の式(35)に式(36)を乗じることによって得られたものである。
{1−0.1s}/{1+0.01s} ・・・式(35)
1/{1+0.1s} ・・・式(36)
前記式(35)は、ラプラス変数による表現において零点を持つような伝達関数に対応し、前記式(36)は、一次遅れ要素に対応するものであって安定性を補償するために使用される。
【0132】
そして、伝達関数G(s)が前記式(34)で表わされる場合、その入力と出力との関係は、図17のようになる。なお、図17において、横軸は時間(秒)を示し、縦軸はゲイン(無次元)を示している。また、線α1〜α4は入力を示し、線β1〜β4は、それぞれ、線α1〜α4で示される入力に対応する出力を示している。
【0133】
伝達関数G(s)の入力は、ハンドル角センサ値δに対して、ローパスフィルタによる処理を施したものであるから、乗員がハンドルバー41aを操作したことによるハンドル角の変化に対応する。また、伝達関数G(s)の出力は、操舵角目標値δ* に対応する。そして、線α1〜α4の傾斜は、ハンドル角の変化速度を表している。
【0134】
線α1〜α4とそれに対応する線β1〜β4を観ると、ハンドル角の変化速度が速いと、すなわち、乗員がハンドルバー41aを急操作すると、操舵初期に、伝達関数G(s)の出力がマイナスとなる、すなわち、カウンタステア操作が発生することが分かる。また、ハンドル角の変化速度が遅いと、すなわち、乗員がハンドルバー41aを緩操作すると、操舵初期にも、伝達関数G(s)の出力がマイナスとならない、すなわち、カウンタステア操作が発生しないことが分かる。
【0135】
なお、図16に示されるブロック図におけるその他の点については、前記第1の実施の形態で説明した図5と同様であるので、その説明を省略する。
【0136】
また、本実施の形態における横加速度演算処理、リンク角速度推定処理、傾斜制御処理及びリンクモータ制御処理の動作については、前記第1の実施の形態と同様であるので、その説明を省略し、ここでは、本実施の形態における操舵制御処理の動作についてのみ説明する。
【0137】
操舵制御部66は、操舵制御処理を開始すると、ハンドル角センサ62が検出したハンドル角の値であるハンドル角センサ値δを取得し(ステップS71)し、ハンドル角センサ値δに対して、フィルタ処理を実行する(ステップS72)。ここまでの動作については、前記第1の実施の形態における操舵制御処理のステップS41及びS42の動作と同様である。
【0138】
続いて、操舵制御部66は、操舵角目標値δ* を算出する(ステップS73)。ここで、操舵角目標値δ* は次の式(37)によって算出される。
δ* =δG(z) ・・・式(37)
なお、伝達関数G(s)は、連続系の伝達関数なので、そのままでは操舵制御ECU61で計算することができない。そのため、例えば、双一次変換等によって、連続系の伝達関数G(s)は、あらかじめ、離散系の伝達関数G(z)に変換されて使用される。
【0139】
前記伝達関数G(s)(又はG(z))を構成するには次の2つの手順がある。第1の手順は、零点がある一次遅れの伝達関数を準備し、実験的に時定数と零点の値とを調整することである。第2の手順は、ナイキストの安定判別の条件を満たすように、一次遅れの伝達関数を前記第1の手順で準備した伝達関数に乗じて使用することである。
【0140】
なお、車速やヨーレートに応じて、動的に(リアルタイムで)零点の値を変更するようにしてもよい。このときの零点の値は、例えば、車速やヨーレートに応じて実験的に決定された値を二次元マップとして保持し、該二次元マップを計算に使用してもよい。
【0141】
続いて、操舵制御部66は、リンク角補正値USLを算出する(ステップS74)。ここで、リンク角補正値USLは次の式(38)によって算出される。
USL=GSL{δ−δ* } ・・・式(38)
続いて、操舵制御部66は、リンク角マスク値GLMを算出する(ステップS75)。ここで、リンク角マスク値GLMは次の式(39)によって算出される。
GLM=f4 (δ−δ* ) ・・・式(39)
続いて、操舵制御部66は、算出した操舵角目標値δ* を操舵モータ制御部67へ出力する(ステップS76)。
【0142】
最後に、操舵制御部66は、算出したリンク角補正値USL及びリンク角マスク値GLMをリンクモータ制御部42へ出力して(ステップS77)、操舵制御処理を終了する。
【0143】
このように、本実施の形態においては、零点がある一次遅れの伝達関数を使用する。具体的には、伝達関数G(s)(又はG(z))を使用する。これにより、乗員によるハンドルバー41aの操作、すなわち、操舵初期にのみカウンタステア操作を発生させるようにすることができる。
【0144】
なお、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【産業上の利用可能性】
【0145】
本発明は、少なくとも左右一対の車輪を有する車両に利用することができる。
【符号の説明】
【0146】
10 車両
11 搭乗部
12F、12L、12R 車輪
20 本体部
25 リンクモータ
41a ハンドルバー
65 操舵モータ
【技術分野】
【0001】
本発明は、少なくとも左右一対の車輪を有する車両に関するものである。
【背景技術】
【0002】
近年、エネルギ資源の枯渇問題に鑑み、車両の省燃費化が強く要求されている。その一方で、車両の低価格化等から、車両の保有者が増大し、1人が1台の車両を保有する傾向にある。そのため、例えば、4人乗りの車両を運転者1人のみが運転することで、エネルギが無駄に消費されるという問題点があった。車両の小型化による省燃費化としては、車両を1人乗りの三輪車又は四輪車として構成する形態が最も効率的であるといえる。
【0003】
しかし、走行状態によっては、車両の安定性が低下してしまうことがある。そこで、車体を横方向に傾斜させることによって、旋回時の車両の安定性を向上させる技術が提案されている(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2008−155671号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、前記従来の車両においては、旋回性能を向上させるために、車体を旋回方向内側に傾斜させることができるようになっているが、旋回方向外側に向けて作用する遠心力の影響によって、トレッドが狭い場合や、重心位置が高い場合や、操舵(だ)速度が速い場合には、車両の安定性が低下しやすく、乗員が不快に感じたり、不安を抱いたりしてしまうことがある。
【0006】
本発明は、前記従来の車両の問題点を解決して、操舵操作の初期、すなわち、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させることによって、トレッドが狭い場合や、重心位置が高い場合や、操舵速度が速い場合であっても、スムーズに車体を旋回方向内側に傾斜させることができるので、車体の安定を維持することができ、また、旋回性能を向上させることができるとともに、乗員が違和感を感じることがなく、乗り心地がよく、安定した走行状態を実現することができる安全性の高い車両を提供することを目的とする。
【課題を解決するための手段】
【0007】
そのために、本発明の車両においては、互いに連結された操舵部及び本体部を備える車体と、前記操舵部に回転可能に取り付けられた車輪であって、前記車体を操舵する操舵可能な操舵輪と、前記本体部に回転可能に取り付けられた車輪であって、操舵不能な非操舵輪と、操舵指令情報を入力する操舵装置と、前記操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、前記操舵装置から入力された操舵指令情報に基づいて前記操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、前記傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、該制御装置は、操舵初期に、前記操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。
【発明の効果】
【0008】
請求項1の構成によれば、操舵初期に、旋回方向内側に向けて車体の重心を移動させることができ、スムーズに車体を旋回方向内側に傾斜させることができるので、操縦性や危機回避性能を犠牲とすることなしに、車体の安定性を維持することができる。
【0009】
請求項2の構成によれば、操舵初期に操舵指令情報に含まれる操舵方向と反対の方向に操舵輪の操舵角を変化させるだけで、旋回方向内側に向けて車体の重心を移動させることができる。したがって、構造を複雑化することなく、操舵初期に、スムーズに車体を旋回方向内側に傾斜させることができる。
【0010】
請求項3〜5の構成によれば、操舵初期にのみ操舵指令情報に含まれる操舵方向と反対の方向に操舵輪の操舵角を変化させることができ、操舵操作の終期、すなわち、操舵終期には操舵指令情報に含まれる操舵方向と反対の方向に操舵輪の操舵角を変化させないようにすることができる。したがって、車体の安定性を維持することができる。
【図面の簡単な説明】
【0011】
【図1】本発明の第1の実施の形態における車両の構成を示す右側面図である。
【図2】本発明の第1の実施の形態における車両のリンク機構の構成を示す図である。
【図3】本発明の第1の実施の形態における車両の構成を示す背面図である。
【図4】本発明の第1の実施の形態における車体傾斜制御システムの構成を示すブロック図である。
【図5】本発明の第1の実施の形態における制御系のブロック図である。
【図6】本発明の第1の実施の形態における旋回走行時の車体の傾斜動作を説明する力学モデルを示す図である。
【図7】本発明の第1の実施の形態における横加速度演算処理の動作を示すフローチャートである。
【図8】本発明の第1の実施の形態におけるリンク角速度推定処理の動作を示すフローチャートである。
【図9】本発明の第1の実施の形態におけるヨーレートの微分処理のサブルーチンを示すフローチャートである。
【図10】本発明の第1の実施の形態におけるフィルタ処理のサブルーチンを示すフローチャートである。
【図11】本発明の第1の実施の形態における傾斜制御処理の動作を示すフローチャートである。
【図12】本発明の第1の実施の形態における操舵制御処理の動作を示すフローチャートである。
【図13】本発明の第1の実施の形態におけるリンクモータ制御処理の動作を示すフローチャートである。
【図14】本発明の第2の実施の形態における制御系のブロック図である。
【図15】本発明の第2の実施の形態における操舵制御処理の動作を示すフローチャートである。
【図16】本発明の第3の実施の形態における制御系のブロック図である。
【図17】本発明の第3の実施の形態における伝達関数の入力と出力との関係を示す図である。
【図18】本発明の第3の実施の形態における操舵制御処理の動作を示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、本発明の実施の形態について図面を参照しながら詳細に説明する。
【0013】
図1は本発明の第1の実施の形態における車両の構成を示す右側面図、図2は本発明の第1の実施の形態における車両のリンク機構の構成を示す図、図3は本発明の第1の実施の形態における車両の構成を示す背面図である。なお、図3において、(a)は車体が直立している状態を示す図、(b)は車体が傾斜している状態を示す図である。
【0014】
図において、10は、本実施の形態における車両であり、車体の駆動部としての本体部20と、乗員が搭乗して操舵する操舵部としての搭乗部11と、車体の前方において幅方向の中心に配設された前輪である操舵可能な操舵輪としての車輪12Fと、後輪として後方に配設された駆動輪であって操舵不能な非操舵輪としての左側の車輪12L及び右側の車輪12Rとを有する。さらに、前記車両10は、車体を左右に傾斜させる、すなわち、リーンさせるためのリーン機構、すなわち、車体傾斜機構として、左右の車輪12L及び12Rを支持するリンク機構30と、該リンク機構30を作動させるアクチュエータである傾斜用アクチュエータ装置としてのリンクモータ25とを有する。なお、前記車両10は、前輪が左右二輪であって後輪が一輪の三輪車であってもよいし、前輪及び後輪が左右二輪の四輪車であってもよいが、本実施の形態においては、図に示されるように、前輪が一輪であって後輪が左右二輪の三輪車である場合について説明する。また、操舵輪が駆動輪として機能してもよいが、本実施の形態においては、操舵輪は駆動輪として機能しないものとして説明する。
【0015】
旋回時には、左右の車輪12L及び12Rの路面18に対する角度、すなわち、キャンバ角を変化させるとともに、搭乗部11及び本体部20を含む車体を旋回内輪側へ傾斜させることによって、旋回性能の向上と乗員の快適性の確保とを図ることができるようになっている。すなわち、前記車両10は車体を横方向(左右方向)にも傾斜させることができる。なお、図2及び3(a)に示される例においては、左右の車輪12L及び12Rは路面18に対して直立している、すなわち、キャンバ角が0度になっている。また、図3(b)に示される例においては、左右の車輪12L及び12Rは路面18に対して右方向に傾斜している、すなわち、キャンバ角が付与されている。
【0016】
前記リンク機構30は、左側の車輪12L及び該車輪12Lに駆動力を付与する電気モータ等から成る左側の回転駆動装置51Lを支持する左側の縦リンクユニット33Lと、右側の車輪12R及び該車輪12Rに駆動力を付与する電気モータ等から成る右側の回転駆動装置51Rを支持する右側の縦リンクユニット33Rと、左右の縦リンクユニット33L及び33Rの上端同士を連結する上側の横リンクユニット31Uと、左右の縦リンクユニット33L及び33Rの下端同士を連結する下側の横リンクユニット31Dと、本体部20に上端が固定され、上下に延在する中央縦部材21とを有する。また、左右の縦リンクユニット33L及び33Rと上下の横リンクユニット31U及び31Dとは回転可能に連結されている。さらに、上下の横リンクユニット31U及び31Dは、その中央部で中央縦部材21と回転可能に連結されている。なお、左右の車輪12L及び12R、左右の回転駆動装置51L及び51R、左右の縦リンクユニット33L及び33R、並びに、上下の横リンクユニット31U及び31Dを統合的に説明する場合には、車輪12、回転駆動装置51、縦リンクユニット33及び横リンクユニット31として説明する。
【0017】
そして、駆動用アクチュエータ装置としての前記回転駆動装置51は、いわゆるインホイールモータであって、固定子としてのボディが縦リンクユニット33に固定され、前記ボディに回転可能に取り付けられた回転子としての回転軸が車輪12の軸に接続され、前記回転軸の回転によって車輪12を回転させる。なお、前記回転駆動装置51は、インホイールモータ以外の種類のモータであってもよい。
【0018】
また、前記リンクモータ25は、電気モータ等を含む回転式の電動アクチュエータであって、固定子としての円筒状のボディと、該ボディに回転可能に取り付けられた回転子としての回転軸とを備えるものであり、前記ボディが取付フランジ22を介して本体部20に固定され、前記回転軸がリンク機構30の上側の横リンクユニット31Uに固定されている。なお、リンクモータ25の回転軸は、本体部20を傾斜させる傾斜軸として機能し、中央縦部材21と上側の横リンクユニット31Uとの連結部分の回転軸と同軸になっている。そして、リンクモータ25を駆動して回転軸をボディに対して回転させると、本体部20及び該本体部20に固定された中央縦部材21に対して上側の横リンクユニット31Uが回動し、リンク機構30が作動する、すなわち、屈伸する。これにより、本体部20を傾斜させることができる。なお、リンクモータ25は、その回転軸が本体部20及び中央縦部材21に固定され、そのボディが上側の横リンクユニット31Uに固定されていてもよい。
【0019】
また、リンクモータ25は、リンク機構30のリンク角の変化を検出するリンク角センサ25aを備える。該リンク角センサ25aは、リンクモータ25においてボディに対する回転軸の回転角を検出する回転角センサであって、例えば、レゾルバ、エンコーダ等から成る。前述のように、リンクモータ25を駆動して回転軸をボディに対して回転させると、本体部20及び該本体部20に固定された中央縦部材21に対して上側の横リンクユニット31Uが回動するのであるから、ボディに対する回転軸の回転角を検出することによって、中央縦部材21に対する上側の横リンクユニット31Uの角度の変化、すなわち、リンク角の変化を検出することができる。
【0020】
なお、リンクモータ25は、回転軸をボディに対して回転不能に固定する図示されないロック機構を備える。該ロック機構は、メカニカルな機構であって、回転軸をボディに対して回転不能に固定している間には電力を消費しないものであることが望ましい。前記ロック機構によって、回転軸をボディに対して所定の角度で回転不能に固定することができる。
【0021】
前記搭乗部11は、本体部20の前端に図示されない連結部を介して連結される。該連結部は、搭乗部11と本体部20とを所定の方向に相対的に変位可能に連結する機能を有していてもよい。
【0022】
また、前記搭乗部11は、座席11a、フットレスト11b及び風よけ部11cを備える。前記座席11aは、車両10の走行中に乗員が着座するための部位である。また、前記フットレスト11bは、乗員の足部を支持するための部位であり、座席11aの前方側(図1における右側)下方に配設される。
【0023】
さらに、搭乗部11の後方若しくは下方又は本体部20には、図示されないバッテリ装置が配設されている。該バッテリ装置は、回転駆動装置51及びリンクモータ25のエネルギ供給源である。また、搭乗部11の後方若しくは下方又は本体部20には、図示されない制御装置、インバータ装置、各種センサ等が収納されている。
【0024】
そして、座席11aの前方には、操縦装置41が配設されている。該操縦装置41には、乗員が操作して操舵方向、操舵角等の操舵指令情報を入力する操舵装置としてのハンドルバー41a、速度メータ等のメータ、インジケータ、スイッチ等の操縦に必要な部材が配設されている。乗員は、前記ハンドルバー41a及びその他の部材を操作して、車両10の走行状態(例えば、進行方向、走行速度、旋回方向、旋回半径等)を指示する。なお、前記操舵装置として、ハンドルバー41aに代えて他の装置、例えば、ステアリングホイール、ジョグダイヤル、タッチパネル、押しボタン等の装置を使用することもできる。
【0025】
なお、車輪12Fは、サスペンション装置(懸架装置)の一部である前輪フォーク17を介して搭乗部11に接続されている。前記サスペンション装置は、例えば、一般的なオートバイ、自転車等において使用されている前輪用のサスペンション装置と同様の装置であり、前記前輪フォーク17は、例えば、スプリングを内蔵したテレスコピックタイプのフォークである。そして、一般的なオートバイ、自転車等の場合と同様に、乗員によるハンドルバー41aの操作に応じて操舵輪としての車輪12Fは操舵角を変化させ、これにより、車両10の進行方向が変化する。
【0026】
具体的には、前記ハンドルバー41aは、図示されない操舵軸部材の上端に接続され、該操舵軸部材の上端は、搭乗部11が備える図示されないフレーム部材に対して回転可能に取り付けられている。前記操舵軸部材は、上端が下端よりも後方に位置するように斜めに傾斜した状態で、前記フレーム部材に取り付けられている。そして、前記操舵軸部材の上端のフレーム部材に対する回転角、すなわち、乗員がハンドルバー41aを操作して入力した操舵角指令値としてのハンドル角は、入力操舵角検出手段としてのハンドル角センサ62によって検出される。該ハンドル角センサ62は、例えば、エンコーダ等から成る。
【0027】
また、前記操舵軸部材の上端と下端との間には、操舵用アクチュエータ装置としての操舵モータ65が配設されており、該操舵モータ65が、前記ハンドル角センサ62によって検出されたハンドル角に基づいて、前記操舵軸部材の下端を回転させる。なお、該操舵軸部材の下端は、前記フレーム部材に対して回転可能に取り付けられ、かつ、前輪フォーク17の上端に接続されている。そして、前記操舵軸部材の下端の前記フレーム部材に対する回転角、すなわち、操舵モータ65が出力し、前輪フォーク17を介して車輪12Fに伝達される操舵角は、出力操舵角検出手段としての操舵角センサ63によって検出される。該操舵角センサ63は、例えば、操舵モータ65においてボディに対する回転軸の回転角を検出する回転角センサであって、レゾルバ、エンコーダ等から成る。なお、前輪である車輪12Fの車軸と後輪である左右の車輪12L及び12Rの車軸との距離、すなわち、ホイールベースはLH である。
【0028】
さらに、車輪12Fの車軸を支持する前輪フォーク17の下端には、車両10の走行速度である車速を検出する車速検出手段としての車速センサ54が配設されている。該車速センサ54は、車輪12Fの回転速度に基づいて車速を検出するセンサであり、例えば、エンコーダ等から成る。
【0029】
本実施の形態において、車両10は横加速度センサ44を有する。該横加速度センサ44は、一般的な加速度センサ、ジャイロセンサ等から成るセンサであって、車両10の横加速度、すなわち、車体の幅方向としての横方向(図3における左右方向)の加速度を検出する。
【0030】
車両10は、旋回時に車体を旋回内側に傾斜させて安定させるので、車体を傾斜させることによって、旋回時の旋回外側への遠心力と重力とが釣り合うような角度になるように制御される。このような制御を行うことによって、例えば、路面18が進行方向と垂直な方向(進行方向に対する左右方向)に傾斜していたとしても、常に車体を水平に保つことが可能になる。これにより、車体及び乗員には、見かけ上、常に重力が鉛直下向きにかかっていることになり、違和感が低減され、また、車両10の安定性が向上する。
【0031】
そこで、本実施の形態においては、傾斜する車体の横方向の加速度を検出するために、横加速度センサ44を車体に取り付け、横加速度センサ44の出力がゼロとなるようにフィードバック制御を行う。これにより、旋回時に作用する遠心力と重力とが釣り合う傾斜角まで、車体を傾斜させることができる。また、進行方向と垂直な方向に路面18が傾斜している場合でも、車体が鉛直になる傾斜角となるように制御することができる。なお、前記横加速度センサ44は、車体の幅方向の中心、すなわち、車体の縦方向軸線上に位置するように配設されている。
【0032】
しかし、横加速度センサ44が1つであると、不要加速度成分をも検出してしまうことがある。例えば、車両10の走行中、路面18の窪(くぼ)みに左右の車輪12L及び12Rのいずれか一方のみが落下する場合があり得る。この場合、車体が傾斜するので、横加速度センサ44は、周方向に変位し、周方向の加速度を検出することになる。つまり、遠心力や重力に直接由来しない加速度成分、すなわち、不要加速度成分が検出されてしまう。
【0033】
また、車両10は、例えば、車輪12L及び12Rのタイヤ部分のように弾性を備え、ばねとして機能する部分を含み、また、各部材の接続部等に不可避的なガタが含まれる。そのため、横加速度センサ44は、不可避的なガタやばねを介して車体に取り付けられていると考えられるので、ガタやばねの変位によって生じる加速度をも不要加速度成分として検出してしまう。
【0034】
このような不要加速度成分は、車体傾斜制御システムの制御性を悪化させる可能性がある。例えば、車体傾斜制御システムの制御ゲインを大きくすると、不要加速度成分に起因する制御系の振動、発散等が発生するので、応答性を向上させようとしても制御ゲインを大きくすることができなくなってしまう。
【0035】
そこで、本実施の形態においては、横加速度センサ44が複数であって、互いに異なる高さに配設されている。図1及び3に示される例において、横加速度センサ44は、第1横加速度センサ44a及び第2横加速度センサ44bの2つであって、第1横加速度センサ44aと第2横加速度センサ44bとは互いに異なる高さ位置に配設されている。第1横加速度センサ44a及び第2横加速度センサ44bの位置を適切に選択することで、効果的に不要加速度成分を取り除くことができる。
【0036】
具体的には、図3(a)に示されるように、第1横加速度センサ44aは、搭乗部11の背面において、路面18からの距離、すなわち、高さがL1 の位置に配設されている。また、第2横加速度センサ44bは、搭乗部11の背面又は本体部20の上面において、路面18からの距離、すなわち、高さがL2 の位置に配設されている。なお、L1 >L2 である。そして、旋回走行時に、図3(b)に示されるように、車体を旋回内側(図において右側)に傾けた状態で旋回すると、第1横加速度センサ44aは、横方向の加速度を検出して検出値a1 を出力し、第2横加速度センサ44bは、横方向の加速度を検出して検出値a2 を出力する。なお、車体が傾く際の傾斜運動の中心、すなわち、ロール中心は、厳密には路面18よりわずかに下方に位置するが、実際上は、概略路面18と等しい位置であると考えられる。
【0037】
前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、十分に剛性の高い部材に取り付けられることが望ましい。また、L1 とL2 との差は、小さいと検出値a1 及びa2 の差が小さくなるので、十分に大きいこと、例えば、0.3〔m〕以上、とすることが望ましい。さらに、前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、リンク機構30よりも上方に配設されることが望ましい。さらに、車体がサスペンション等のばねで支持されている場合、前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、いわゆる「ばね上」に配設されることが望ましい。さらに、前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、前輪である車輪12Fの車軸と後輪である左右の車輪12L及び12Rの車軸との間に配設されることが望ましい。さらに、前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、可能な限り乗員の近くに配設されることが望ましい。さらに、前記第1横加速度センサ44a及び第2横加速度センサ44bは、ともに、上側から観て進行方向に延在する車体の中心軸上に位置すること、すなわち、進行方向に関してオフセットされないことが望ましい。
【0038】
本実施の形態においては、車体の傾斜運動の角速度を検出するロールレートセンサ44c、及び、車体の旋回運動の角速度、すなわち、車体のヨー角速度を検出するヨー角速度検出手段としてのヨーレートセンサ44dが配設されている。具体的には、前記ロールレートセンサ44c及びヨーレートセンサ44dは、ともに、上側から観て進行方向に延在する車体の中心軸上に位置すること、すなわち、進行方向に関してオフセットされないことが望ましく、例えば、座席11aとフットレスト11bとの間に配設される。
【0039】
なお、前記ロールレートセンサ44cは、一般的なロールレートセンサであって、例えば、ジャイロセンサを、路面18と垂直方向の面内での回転角速度を検出することができるように取り付けたものである。また、前記ヨーレートセンサ44dは、一般的なヨーレートセンサであって、例えば、ジャイロセンサを、路面18と平行な面内での回転角速度を検出することができるように取り付けたものである。なお、三次元ジャイロセンサであれば、ロールレートセンサ44c及びヨーレートセンサ44dの機能を発揮することができる。つまり、ロールレートセンサ44c及びヨーレートセンサ44dは、それぞれ、別個に構成されたものであってもよいし、一体的に構成されたものであってもよい。
【0040】
また、本実施の形態における車両10は、制御装置の一部としての車体傾斜制御システムを有する。該車体傾斜制御システムは、一種のコンピュータシステムであり、ECU(Electronic Control Unit)等から成る傾斜制御装置及び操舵制御装置を備える。前記傾斜制御装置は、プロセッサ等の演算手段、磁気ディスク、半導体メモリ等の記憶手段、入出力インターフェイス等を備え、リンク角センサ25a、第1横加速度センサ44a、第2横加速度センサ44b、ロールレートセンサ44c、ヨーレートセンサ44d、車速センサ54及びリンクモータ25に接続されている。そして、前記傾斜制御装置は、リンクモータ25を作動させるためのトルク指令値を出力する。また、前記操舵制御装置は、プロセッサ等の演算手段、磁気ディスク、半導体メモリ等の記憶手段、入出力インターフェイス等を備え、ハンドル角センサ62、操舵角センサ63、車速センサ54及び操舵モータ65に接続されている。そして、前記操舵制御装置は、操舵モータ65を作動させるための制御パルスを出力する。なお、前記傾斜制御装置と操舵制御装置とは相互に接続されている。また、前記傾斜制御装置及び操舵制御装置は、必ずしも別個に構成される必要はなく、一体的に構成されたものであってもよい。
【0041】
前記傾斜制御装置は、旋回走行の際には、フィードバック制御及びフィードフォワード制御を行い、車体の傾斜角度が、横加速度センサ44が検出する横加速度の値がゼロとなる角度になるように、リンクモータ25を作動させる。つまり、旋回外側への遠心力と重力とが釣り合って、横方向の加速度成分がゼロとなる角度になるように、車体の傾斜角度を制御する。これにより、車体及び搭乗部11に搭乗している乗員には、車体の縦方向軸線と平行な方向の力が作用することとなる。したがって、車体の安定を維持することができ、また、旋回性能を向上させることができる。
【0042】
また、傾斜方向への外乱を受けたときには、車体の傾斜角度の変化のうちの外乱による部分を抽出し、残余の部分に対しては通常モードで車体の傾斜角度を制御するとともに、抽出した部分に対しては外乱対応モードで車体の傾斜角度を制御する。したがって、外乱を受けたときでも、車体の安定を維持することができる。また、乗員が違和感を感じることがなく、乗り心地が向上する。
【0043】
さらに、本実施の形態においては、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。つまり、乗員がハンドルバー41aの操作を開始した直後の時期に、ハンドルバー41aの操作によって入力した操舵方向に車体の重心を移動させ、これにより、旋回方向内側に向けた加速度を発生させる。なお、後述される操舵制御部66は、乗員がハンドルバー41aの操作を開始した直後の時期に、ハンドルバー41aの操作によって入力した操舵方向と反対の方向に操舵輪としての車輪12Fの操舵角を変化させる、すなわち、カウンタステア操作を実行することによって、ハンドルバー41aの操作により入力した操舵方向に車体の重心を移動させる。
【0044】
より具体的には、前記操舵制御装置は、ハンドル角の加速度の値に比例した値をハンドル角の値から減算して操舵角の目標値を設定する。これにより、操舵初期(乗員がハンドルバー41aを操作し始めた時、つまり、ハンドルを切り始めた時)に、操舵方向(ハンドルを切った方向)と反対の方向に、操舵輪としての車輪12Fの操舵角が変化する。すなわち、逆ハンドル操作、又は、カウンタステア操作が行われる。そのため、操舵初期には、乗員の意図した旋回方向と逆の旋回方向への旋回が開始されるので、該旋回によって発生する遠心力が、乗員の意図した旋回方向内側に車体を傾斜させる力として作用するので、この力を車体傾斜制御に利用することにより、スムーズに車体を旋回方向内側に傾斜させることができる。つまり、操舵初期に、旋回方向内側に向けて車体の重心を移動させることができるので、スムーズに車体を旋回方向内側に傾斜させることができる。
【0045】
このような操舵制御を行うことなしに車体傾斜制御を行うと、例えば、トレッド(左右の車輪12L及び12Rの接地点間の距離)が狭い場合や、車両10の重心位置が高い場合や、操舵速度(ハンドルを切る速度)が速い場合には、旋回によって発生する遠心力が旋回方向外側に車体を傾斜させる力として作用するので、旋回方向内側に車体を傾斜させにくく、車両10の安定性が低下することがある。もっとも、操舵輪としての車輪12Fの操舵角の速度又は加速度を低下させれば、遠心力を抑制して、スムーズに車体を旋回方向内側に傾斜させることができるので、車体の安定性を維持することができる。しかし、この場合、車両10の運動性能が低下するので、操縦性が悪化するとともに、危機回避性能も低下してしまう。
【0046】
これに対して、本実施の形態においては、前述のように、操舵初期に、いわゆる、カウンタステア操作が行われたのと同様に、操舵方向と反対の方向に車輪12Fの操舵角が変化する。これにより、操舵初期に、旋回方向内側に向けて車体の重心を移動させることができ、スムーズに車体を旋回方向内側に傾斜させることができるので、操縦性や危機回避性能を犠牲とすることなしに、車体の安定性を維持することができる。
【0047】
次に、前記車体傾斜制御システムの構成について説明する。
【0048】
図4は本発明の第1の実施の形態における車体傾斜制御システムの構成を示すブロック図である。
【0049】
図において、46は傾斜制御装置としての傾斜制御ECUであり、リンク角センサ25a、第1横加速度センサ44a、第2横加速度センサ44b、ロールレートセンサ44c、ヨーレートセンサ44d、車速センサ54及びリンクモータ25に接続されている。また、前記傾斜制御ECU46は、横加速度演算部48、リンク角速度推定部50、外乱演算部43、傾斜制御部47及びリンクモータ制御部42を備える。
【0050】
また、61は操舵制御装置としての操舵制御ECUであり、ハンドル角センサ62、操舵角センサ63、車速センサ54及び操舵モータ65に接続されている。さらに、前記操舵制御ECU61は、操舵制御部66及び操舵モータ制御部67を備える。
【0051】
ここで、前記横加速度演算部48は、第1横加速度センサ44a及び第2横加速度センサ44bが検出した横加速度に基づいて合成横加速度を算出する。また、前記リンク角速度推定部50は、ヨーレートセンサ44dが検出したヨー角速度としてのヨーレート、及び、車速センサ54が検出した車速に基づいてリンク角速度予測値を算出する。さらに、前記外乱演算部43は、ロールレートセンサ44cが検出した車体の傾斜運動の角速度としてのロールレート、及び、リンク角センサ25aが検出したリンク角に基づいて外乱分のロールレートを算出する。
【0052】
そして、前記傾斜制御部47は、横加速度演算部48が算出した合成横加速度、リンク角速度推定部50が算出したリンク角速度予測値、及び、外乱演算部43が算出した外乱分のロールレートに基づいて、制御値としての速度指令値を演算して出力する。さらに、前記リンクモータ制御部42は、傾斜制御部47が出力した速度指令値、及び、操舵制御部66が出力した操舵輪操舵角指令値に基づいてリンクモータ25を作動させるための制御値としてのトルク指令値を出力する。
【0053】
また、前記操舵制御部66は、ハンドル角センサ62が検出したハンドル角、及び、車速センサ54が検出した車速に基づいて、制御値としての操舵輪操舵角指令値を演算して出力する。前記操舵モータ制御部67は、操舵角センサ63が検出した操舵角、及び、操舵制御部66が出力した操舵輪操舵角指令値に基づいて操舵モータ65を作動させるための制御値としての制御パルスを出力する。
【0054】
次に、前記構成の車両10の動作について説明する。まず、旋回走行における車体傾斜制御処理の動作の一部である横加速度演算処理の動作について説明する。
【0055】
図5は本発明の第1の実施の形態における制御系のブロック図、図6は本発明の第1の実施の形態における旋回走行時の車体の傾斜動作を説明する力学モデルを示す図、図7は本発明の第1の実施の形態における横加速度演算処理の動作を示すフローチャートである。
【0056】
本実施の形態における車体傾斜制御処理では、図5に示されるような傾斜制御ECU46による傾斜制御と操舵制御ECU61による操舵制御とを組み合わせた制御が行われる。なお、傾斜制御ECU46による傾斜制御は、フィードバック制御とフィードフォワード制御とを組み合わせた制御である。
【0057】
図5において、f1 は後述される式(6)で表される伝達関数であり、GP 、GRP、GYD、GST及びGSLは比例制御動作の制御ゲインであり、LPFはローパスフィルタであり、sは微分要素である。また、f2 は後述される式(10)で表されるリンク角速度予測値であり、f3 はロールレートゲインであり、f4 は後述される式(26)で表されるカウンタステア操作の影響を消すための関数である。
【0058】
旋回走行が開始されると、車体傾斜制御システムは車体傾斜制御処理を開始する。姿勢制御が行われることで、車両10は、リンク機構30によって、旋回走行時には、図3(b)に示されるように、車体を旋回内側(図において右側)に傾けた状態で旋回する。また、旋回走行時には、旋回外側への遠心力が車体に作用するとともに、車体を旋回内側に傾けたことによって重力の横方向成分が発生する。そして、横加速度演算部48は、横加速度演算処理を実行し、合成横加速度aを算出して傾斜制御部47に出力する。すると、該傾斜制御部47は、フィードバック制御を行い、合成横加速度aの値がゼロとなるような制御値としての速度指令値を出力する。そして、リンクモータ制御部42は、傾斜制御部47が出力した速度指令値に基づいてトルク指令値をリンクモータ25に出力する。
【0059】
なお、車体傾斜制御処理は、車両10の電源が投入されている間、車体傾斜制御システムによって繰り返し所定の制御周期TS (例えば、5〔ms〕)で実行される処理であり、旋回時において、旋回性能の向上と乗員の快適性の確保とを図る処理である。
【0060】
また、図6において、44Aは車体において第1横加速度センサ44aの配設された位置を示す第1センサ位置であり、44Bは車体において第2横加速度センサ44bの配設された位置を示す第2センサ位置である。
【0061】
第1横加速度センサ44a及び第2横加速度センサ44bが検出してその検出値を出力する加速度は、〈1〉旋回時に車体に作用する遠心力、〈2〉車体を旋回内側に傾けたことによって発生する重力の横方向成分、〈3〉左右の車輪12L及び12Rのいずれか一方のみが路面18の窪みに落下することによる車体の傾斜、ガタやばねの変位等により第1横加速度センサ44a及び第2横加速度センサ44bが周方向に変位することによって生じる加速度、並びに、〈4〉リンクモータ25の作動又はその反作用により第1横加速度センサ44a及び第2横加速度センサ44bが周方向に変位することによって生じる加速度、の4つであると考えられる。これら4つの加速度のうち、前記〈1〉及び〈2〉は、第1横加速度センサ44a及び第2横加速度センサ44bの高さ、すなわち、L1 及びL2 と無関係である。一方、前記〈3〉及び〈4〉は、周方向に変位することによって生じる加速度であるから、ロール中心からの距離に比例する、すなわち、概略L1 及びL2 に比例する。
【0062】
ここで、第1横加速度センサ44a及び第2横加速度センサ44bが検出してその検出値を出力する〈3〉の加速度をaX1及びaX2とし、第1横加速度センサ44a及び第2横加速度センサ44bが検出してその検出値を出力する〈4〉の加速度をaM1及びaM2とする。また、第1横加速度センサ44a及び第2横加速度センサ44bが検出してその検出値を出力する〈1〉の加速度をaT とし、第1横加速度センサ44a及び第2横加速度センサ44bが検出してその検出値を出力する〈2〉の加速度をaG とする。なお、前記〈1〉及び〈2〉は、第1横加速度センサ44a及び第2横加速度センサ44bの高さに無関係なので、第1横加速度センサ44a及び第2横加速度センサ44bの検出値は等しい。
【0063】
そして、左右の車輪12L及び12Rのいずれか一方のみが路面18の窪みに落下することによる車体の傾斜、ガタやばねの変位等による周方向の変位の角速度をωR とし、その角加速度をωR ’とする。また、リンクモータ25の作動又はその反作用による周方向の変位の角速度をωM とし、その角加速度をωM ’とする。なお、角速度ωM 又は角加速度ωM ’は、リンク角センサ25aの検出値から取得することができる。
【0064】
すると、aX1=L1 ωR ’、aX2=L2 ωR ’、aM1=L1 ωM ’、aM2=L2 ωM ’となる。
【0065】
また、第1横加速度センサ44a及び第2横加速度センサ44bが検出して出力する加速度の検出値をa1 及びa2 とすると、a1 及びa2 は、4つの加速度〈1〉〜〈4〉の合計であるから、次の式(1)及び(2)で表される。
a1 =aT +aG +L1 ωR ’+L1 ωM ’ ・・・式(1)
a2 =aT +aG +L2 ωR ’+L2 ωM ’ ・・・式(2)
そして、式(1)から式(2)を減算すると、次の式(3)を得ることができる。
a1 −a2 =(L1 −L2 )ωR ’+(L1 −L2 )ωM ’ ・・・式(3)
ここで、L1 及びL2 の値は、第1横加速度センサ44a及び第2横加速度センサ44bの高さであるから既知である。また、ωM ’の値は、リンクモータ25の角速度ωM の微分値であるから既知である。すると、前記式(3)の右辺においては、第1項のωR ’の値のみが未知であり、他の値はすべて既知である。したがって、第1横加速度センサ44a及び第2横加速度センサ44bの検出値a1 及びa2 から、ωR ’の値を得ることが可能である。つまり、第1横加速度センサ44a及び第2横加速度センサ44bの検出値a1 及びa2 に基づいて、不要加速度成分を取り除くことができる。
【0066】
車体傾斜制御システムが車体傾斜制御処理を開始すると、横加速度演算部48は、横加速度演算処理を開始し、まず、第1横加速度センサ値a1 を取得するとともに(ステップS1)、第2横加速度センサ値a2 を取得する(ステップS2)。そして、横加速度演算部48は、加速度差Δaを算出する(ステップS3)。該Δaは次の式(4)によって表される。
Δa=a1 −a2 ・・・式(4)
続いて、横加速度演算部48は、ΔL呼出を行うとともに(ステップS4)、L2 呼出を行う(ステップS5)。前記ΔLは次の式(5)によって表される。
ΔL=L1 −L2 ・・・式(5)
続いて、横加速度演算部48は、合成横加速度aを算出する(ステップS6)。なお、合成横加速度aは、横加速度センサ44が1つである場合における横加速度センサ値aに相当する値であって、第1横加速度センサ値a1 と第2横加速度センサ値a2 とを合成した値であり、次の式(6)及び(7)によって得られる。
a=a2 −(L2 /ΔL)Δa ・・・式(6)
a=a1 −(L1 /ΔL)Δa ・・・式(7)
理論上は、式(6)によっても式(7)によっても、同じ値を得ることができるが、周方向の変位によって生じる加速度はロール中心からの距離に比例するので、実際上は、ロール中心により近い方の横加速度センサ44、すなわち、第2横加速度センサ44bの検出値であるa2 を基準にすることが望ましい。そこで、本実施の形態においては、式(6)によって合成横加速度aを算出することとする。
【0067】
最後に、横加速度演算部48は、傾斜制御部47へ合成横加速度aを送出して(ステップS7)、横加速度演算処理を終了する。
【0068】
このように、本実施の形態においては、第1横加速度センサ44aと第2横加速度センサ44bとを互いに異なる高さ位置に配設し、第1横加速度センサ値a1 と第2横加速度センサ値a2 とを合成した合成横加速度aを算出し、該合成横加速度aの値がゼロとなるように、フィードバック制御を行って車体の傾斜角度を制御する。
【0069】
これにより、不要加速度成分を取り除くことができるので、路面状況の影響を受けることがなく、制御系の振動、発散等の発生を防止することができ、車体傾斜制御システムの制御ゲインを大きくして制御の応答性を向上させることができる。
【0070】
なお、本実施の形態においては、横加速度センサ44が2つである場合について説明したが、横加速度センサ44は、複数であって互いに異なる高さに配設されていれば、3つ以上であってもよく、いくつであってもよい。
【0071】
次に、旋回走行におけるリンク角速度を推定するリンク角速度推定処理の動作について説明する。
【0072】
図8は本発明の第1の実施の形態におけるリンク角速度推定処理の動作を示すフローチャート、図9は本発明の第1の実施の形態におけるヨーレートの微分処理のサブルーチンを示すフローチャート、図10は本発明の第1の実施の形態におけるフィルタ処理のサブルーチンを示すフローチャートである。
【0073】
リンク角速度推定部50は、リンク角速度推定処理を開始すると、まず、ヨーレートセンサ44dが検出したヨーレートの値であるヨーレートセンサ値ψを取得するとともに(ステップS11)、車速センサ54が検出した車速の値である車速センサ値νを取得する(ステップS12)。
【0074】
そして、リンク角速度推定部50は、ヨーレートの微分処理を実行し(ステップS13)、Δψを算出する。該Δψは、ヨーレートを時間微分した値であり、ヨー角加速度に相当する。
【0075】
ヨーレートの微分処理において、リンク角速度推定部50は、まず、ψold 呼出を行う(ステップS13−1)。なお、ψold は、前回の車体傾斜制御処理実行時に保存されたψ(t)の値である。なお、初期設定においては、ψold =0とされている。
【0076】
続いて、リンク角速度推定部50は、制御周期TS を取得する(ステップS13−2)。
【0077】
続いて、リンク角速度推定部50は、ヨーレート微分値Δψを算出する(ステップS13−3)。Δψは、次の式(8)によって算出される。
Δψ=(ψ(t)−ψold )/TS ・・・式(8)
そして、リンク角速度推定部50は、ψold =ψ(t)として保存し(ステップS13−4)、ヨーレートの微分処理を終了する。
【0078】
続いて、リンク角速度推定部50は、ヨーレート微分値Δψに対して、フィルタ処理を実行する(ステップS14)。
【0079】
フィルタ処理において、リンク角速度推定部50は、まず、制御周期TS を取得する(ステップS14−1)。
【0080】
続いて、リンク角速度推定部50は、カットオフ周波数wを取得する(ステップS14−2)。
【0081】
続いて、リンク角速度推定部50は、Δψold 呼出を行う(ステップS14−3)。なお、Δψold は、前回の車体傾斜制御処理実行時に保存されたΔψ(t)の値である。
【0082】
続いて、リンク角速度推定部50は、フィルタ処理されたヨーレート微分値Δψ(t)を算出する(ステップS14−4)。Δψ(t)は、次の式(9)によって算出される。
Δψ(t)=Δψold /(1+TS w)+TS wψ/(1+TS w) ・・・式(9)
該式(9)は、バンドパスフィルタとして一般的に使用されるIIR(Infinite Impulse Response)フィルタの式であるが、単純に一次遅れ系のローパスフィルタを用いてもよい。IIRフィルタとしては、例えば、チェビシェフII型フィルタを使用してもよいし、その他のフィルタを使用してもよい。また、一般的に使用されるFIR(Finite Impulse Response)フィルタを使用してもよい。さらに、バンドパスフィルタのカットオフ周波数(−3〔dB〕周波数)は、10〔Hz〕以下であることが望ましく、数〔Hz〕であることがより望ましい。
【0083】
そして、リンク角速度推定部50は、Δψold =Δψ(t)として保存し(ステップS14−5)、フィルタ処理を終了する。つまり、今回の車体傾斜制御処理実行時に算出したΔψ(t)の値をΔψold として、記憶手段に保存する。
【0084】
続いて、リンク角速度推定部50は、リンク角速度予測値f2 を算出する(ステップS15)。ここで、重力をgとすると、リンク角速度予測値f2 は、次の式(10)によって算出される。
f2 =dη/dt=(ν/g)(dψ/dt) ・・・式(10)
前述のように、リンク角センサ25aは、中央縦部材21に対する上側の横リンクユニット31Uの角度の変化、すなわち、リンク角の変化を検出する。ここで、リンク角をηとし、旋回時における車体の傾斜角が、横加速度としての遠心力a0 と重力gとが釣り合うように制御されているものとすると、路面が水平であれば、遠心力a0 と重力gとの間には、次の式(11)で表される関係が成立する。
a0 cos η=gsin η ・・・式(11)
該式(11)から、次の式(12)が導出される。
a0 /g=sin η/cos η=tan η ・・・式(12)
さらに、該式(12)から、次の式(13)が導出される。
a0 =gtan η ・・・式(13)
一方、ヨーレートがψであり、旋回半径がrであるとすると、車速ν及び旋回時に車体に作用する横加速度としての遠心力a0 は次の式(14)及び(15)によって表される。
ν=rψ ・・・式(14)
a0 =rψ2 =νψ ・・・式(15)
そして、該式(15)と前記式(13)とから、次の式(16)が導出される。
tan η=νψ/g ・・・式(16)
さらに、tan η≒ηと近似することができるとともに、車速νの変化がリンク角ηの変化と比較して十分に遅いので、車速νを定数とみなすことができるとすると、前記式(16)から、前記式(10)を得ることができる。
【0085】
続いて、リンク角速度推定部50は、リンク角速度制御値af を算出する(ステップS16)。リンク角速度制御値af は、次の式(17)によって算出される。
af =Adη/dt ・・・式(17)
ここで、Aは、0〜1の任意の値であり、車両10の構造に応じて決定されるチューニング定数である。
【0086】
最後に、リンク角速度推定部50は、傾斜制御部47へリンク角速度制御値af を送出して(ステップS17)、リンク角速度推定処理を終了する。
【0087】
次に、リンクモータ制御部42へ速度指令値を出力するための傾斜制御処理の動作について説明する。
【0088】
図11は本発明の第1の実施の形態における傾斜制御処理の動作を示すフローチャートである。
【0089】
傾斜制御処理において、傾斜制御部47は、まず、横加速度演算部48から合成横加速度aを受信する(ステップS21)。
【0090】
続いて、傾斜制御部47は、aold 呼出を行う(ステップS22)。aold は、前回の車体傾斜制御処理実行時に保存された合成横加速度aである。なお、初期設定においては、aold =0とされている。
【0091】
続いて、傾斜制御部47は、制御周期TS を取得し(ステップS23)、aの微分値を算出する(ステップS24)。ここで、aの微分値をda/dtとすると、該da/dtは次の式(18)によって算出される。
da/dt=(a−aold )/TS ・・・式(18)
そして、傾斜制御部47は、aold =aとして保存する(ステップS25)。つまり、今回の車体傾斜制御処理実行時に取得した横加速度センサ値aをaold として、記憶手段に保存する。
【0092】
続いて、傾斜制御部47は、第1制御値UP を算出する(ステップS26)。ここで、比例制御動作の制御ゲイン、すなわち、比例ゲインをGP とすると、第1制御値UP は次の式(19)によって算出される。
UP =GP a ・・・式(19)
続いて、傾斜制御部47は、第2制御値UD を算出する(ステップS27)。ここで、微分制御動作の制御ゲイン、すなわち、微分時間をGD とすると、第2制御値UD は次の式(20)によって算出される。
UD =GD da/dt ・・・式(20)
続いて、傾斜制御部47は、第3制御値Uを算出する(ステップS28)。該第3制御値Uは、第1制御値UP と第2制御値UD との合計であり、次の式(21)によって算出される。
U=UP +UD ・・・式(21)
第3制御値Uを算出すると、傾斜制御部47は、リンク角速度推定部50からリンク角速度制御値af を受信する(ステップS29)。
【0093】
続いて、傾斜制御部47は、第4制御値Uを算出する(ステップS30)。該第4制御値Uは、第3制御値Uとリンク角速度制御値af との合計であり、次の式(22)によって算出される。
U=U+af ・・・式(22)
最後に、傾斜制御部47は、第4制御値Uを速度指令値としてリンクモータ制御部42へ出力して(ステップS31)、傾斜制御処理を終了する。
【0094】
次に、旋回走行における車体制御動作の一部である操舵制御処理の動作について説明する。
【0095】
図12は本発明の第1の実施の形態における操舵制御処理の動作を示すフローチャートである。
【0096】
操舵制御処理においては、ハンドル角センサ値δを取得した後、車速νに応じて関数を作用させてもよい。例えば、一般的に、車速νが高くなると、ハンドルを大きく切っても操舵輪の操舵角を大きくする必要がなくなる。そのため、操舵制御処理において演算に使用するハンドル角センサ値δは、ハンドル角センサ62から取得した後に車速νと反比例するような関数を乗じることで、決定することもできる。
【0097】
また、ハンドル角センサ値δによって車体のヨーレートを決定することもできる。これは、車速νとは無関係に、あるハンドル角センサ値δのときはあるヨーレートとなるようにフィードバック制御を構成するものである。
【0098】
これらは、いずれも、ステアバイワイヤを行うときに採用される手法である。
【0099】
本実施の形態における操舵制御部66は、操舵制御処理を開始すると、まず、ハンドル角センサ62が検出したハンドル角の値であるハンドル角センサ値δを取得する(ステップS41)。前記ハンドル角は、乗員がハンドルバー41aを操作して入力した操舵角指令値である。
【0100】
続いて、操舵制御部66は、ハンドル角センサ値δに対して、フィルタ処理を実行する(ステップS42)。該フィルタ処理は、前記リンク角速度推定処理におけるフィルタ処理と同様の、ローパスフィルタによる処理であり、バンドパスフィルタとして一般的に使用されるIIRフィルタ又はFIRフィルタを使用することができるし、一次遅れ系の単純なローパスフィルタを用いてもよい。
【0101】
続いて、操舵制御部66は、ハンドル角センサ値δの微分値dδ/dtを算出する(ステップS43)。ここで、ハンドル角センサ値δの微分値dδ/dtは、ハンドル角の角速度を表す。
【0102】
続いて、操舵制御部66は、ハンドル角センサ値δの二階微分値d2 δ/dt2 を算出する(ステップS44)。ここで、ハンドル角センサ値δの二階微分値d2 δ/dt2 は、ハンドル角の角加速度を表す。
【0103】
続いて、操舵制御部66は、操舵角目標値δ* を算出する(ステップS45)。ここで、カウンタステア操作に相当する制御ゲインをGSTとすると、操舵角目標値δ* は次の式(23)によって算出される。
δ* =δ−GSTd2 δ/dt2 ・・・式(23)
続いて、操舵制御部66は、リンク角補正値USLを算出する(ステップS46)。ここで、ハンドル角に応じてリンク角を制御する制御ゲイン、つまり、ハンドルを切る方向に応じて車体を旋回方向内側に傾斜させるようにリンク角を制御する制御ゲインをGSLとすると、リンク角補正値USLは次の式(24)によって算出される。
USL=GSLd2 δ/dt2 ・・・式(24)
続いて、操舵制御部66は、リンク角マスク値GLMを算出する(ステップS47)。ここで、カウンタステア操作の影響を消すための関数をf4 とすると、リンク角マスク値GLMは次の式(25)によって算出される。
GLM=f4 (d2 δ/dt2 ) ・・・式(25)
なお、f4 は、カウンタステア操作時に、横加速度に基づいた傾斜制御処理の影響を排除するための関数である。カウンタステア操作によって、乗員の意図した旋回方向と逆の旋回方向への旋回が開始されるので、該旋回により発生する遠心力が、乗員の意図した旋回方向の内側に車体を傾斜させる方向の横加速度として検出される。そのため、該横加速度に基づいた傾斜制御処理が行われると、乗員の意図した旋回方向の外側に車体を傾斜させることになってしまう。したがって、カウンタステア操作時には、横加速度に基づいた傾斜制御処理の影響を排除する必要がある。
【0104】
そこで、f4 は、入力が実際に取り得る最大値のときに0を出力するような関数として構成される。なお、出力は0〜1である。例えば、入力をxとし、該xが実際に取り得る最大値をXMAX とすると、出力yは、次の式(26)によって得ることができる。
y=−1/XMAX ・|x|+1 ・・・式(26)
続いて、操舵制御部66は、算出した操舵角目標値δ* を操舵モータ制御部67へ出力する(ステップS48)。
【0105】
最後に、操舵制御部66は、算出したリンク角補正値USL及びリンク角マスク値GLMをリンクモータ制御部42へ出力して(ステップS49)、操舵制御処理を終了する。
【0106】
次に、リンクモータ25へトルク指令値を出力するためのリンクモータ制御処理の動作について説明する。
【0107】
図13は本発明の第1の実施の形態におけるリンクモータ制御処理の動作を示すフローチャートである。
【0108】
リンクモータ制御処理において、リンクモータ制御部42は、まず、傾斜制御部47から第4制御値Uを受信する(ステップS51)。
【0109】
続いて、リンクモータ制御部42は、操舵制御部66からリンク角補正値USL及びリンク角マスク値GLMを受信する(ステップS52)。
【0110】
続いて、リンクモータ制御部42は、第5制御値Uを算出する(ステップS53)。該第5制御値Uは、第4制御値Uとリンク角補正値USL及びリンク角マスク値GLMとに基づいて、次の式(27)によって算出される。
U=GLMU+USL ・・・式(27)
続いて、リンクモータ制御部42は、リンク角の角速度、すなわち、リンク角速度Δηを取得する(ステップS54)。該リンク角速度Δηは、リンク角センサ25aが検出したリンク角センサ値ηを取得し、該リンク角センサ値ηを時間微分することによって算出される。また、リンクモータ制御部42は、リンク角速度Δηの値を外乱演算部43から取得することもできる。
【0111】
続いて、リンクモータ制御部42は、制御誤差としての偏差を算出する(ステップS55)。ここで、偏差をεとすると、該εは、次の式(28)によって算出される。
ε=U−Δη ・・・式(28)
なお、Uは第5制御値Uである。
【0112】
続いて、リンクモータ制御部42は、リンクモータ25を作動させるためのトルク指令値としてのリンクモータ制御値を算出する(ステップS56)。ここで、リンクモータ制御値をUM とすると、該UM は次の式(29)によって算出される。
UM =GMPε ・・・式(29)
なお、GMPはモータ制御比例ゲインであって、GMPの値は、実験等に基づいて設定された値であり、あらかじめ記憶手段に格納されている。
【0113】
最後に、リンクモータ制御部42は、リンクモータ制御値UM をリンクモータ25へ出力して(ステップS57)、リンクモータ制御処理を終了する。
【0114】
ここでは、リンクモータ制御処理が比例制御、すなわち、P制御であるものとして説明したが、PID制御であってもよい。
【0115】
このように、本実施の形態においては、操舵初期に、操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させる。つまり、乗員がハンドルバー41aの操作を開始した直後の時期に、ハンドルバー41aの操作によって入力した操舵方向に車体の重心を移動させ、これにより、旋回方向内側に向けた加速度を発生させる。なお、操舵制御部66は、乗員がハンドルバー41aの操作を開始した直後の時期に、ハンドルバー41aの操作によって入力した操舵方向と反対の方向に操舵輪としての車輪12Fの操舵角を変化させる、すなわち、カウンタステア操作を実行することによって、ハンドルバー41aの操作により入力した操舵方向に車体の重心を移動させる。
【0116】
これにより、操舵初期に、旋回方向内側に向けて車体の重心を移動させることができ、スムーズに車体を旋回方向内側に傾斜させることができるので、操縦性や危機回避性能を犠牲とすることなしに、車体の安定性を維持することができる。
【0117】
次に、本発明の第2の実施の形態について説明する。なお、第1の実施の形態と同じ構造を有するものについては、同じ符号を付与することによってその説明を省略する。また、前記第1の実施の形態と同じ動作及び同じ効果についても、その説明を省略する。
【0118】
図14は本発明の第2の実施の形態における制御系のブロック図、図15は本発明の第2の実施の形態における操舵制御処理の動作を示すフローチャートである。
【0119】
本実施の形態における車体傾斜制御処理では、図14に示されるような傾斜制御ECU46による傾斜制御と操舵制御ECU61による操舵制御とを組み合わせた制御が行われる。図14において、f5 は後述される式(30)で表されるカウンタステア操作における操舵角の計算値、すなわち、逆操舵計算値を算出するための関数である。なお、その他の点については、前記第1の実施の形態で説明した図5と同様であるので、その説明を省略する。
【0120】
また、本実施の形態における横加速度演算処理、リンク角速度推定処理、傾斜制御処理及びリンクモータ制御処理の動作については、前記第1の実施の形態と同様であるので、その説明を省略し、ここでは、本実施の形態における操舵制御処理の動作についてのみ説明する。
【0121】
操舵制御部66は、操舵制御処理を開始すると、ハンドル角センサ62が検出したハンドル角の値であるハンドル角センサ値δを取得し(ステップS61)、ハンドル角センサ値δに対して、フィルタ処理を実行し(ステップS62)、ハンドル角センサ値δの微分値dδ/dtを算出し(ステップS63)、ハンドル角センサ値δの二階微分値d2 δ/dt2 を算出する(ステップS64)。ここまでの動作については、前記第1の実施の形態における操舵制御処理のステップS41〜S44の動作と同様である。
【0122】
続いて、操舵制御部66は逆操舵計算値δSLを算出する(ステップS65)。該逆操舵計算値δSLは、関数f5 に従って算出され、具体的には、次の式(30)によって得ることができる。
【0123】
【数1】
【0124】
これにより、乗員によるハンドルバー41aの操作、すなわち、操舵初期にのみカウンタステア操作を発生させ、操舵終期にはカウンタステア操作を発生させないようにすることができる。
【0125】
続いて、操舵制御部66は、操舵角目標値δ* を算出する(ステップS66)。ここで、操舵角目標値δ* は次の式(31)によって算出される。
δ* =δ−GSTδSL ・・・式(31)
続いて、操舵制御部66は、リンク角補正値USLを算出する(ステップS67)。ここで、リンク角補正値USLは次の式(32)によって算出される。
USL=GSLδSL ・・・式(32)
続いて、操舵制御部66は、リンク角マスク値GLMを算出する(ステップS68)。ここで、リンク角マスク値GLMは次の式(33)によって算出される。
GLM=f4 (δSL) ・・・式(33)
続いて、操舵制御部66は、算出した操舵角目標値δ* を操舵モータ制御部67へ出力する(ステップS69)。
【0126】
最後に、操舵制御部66は、算出したリンク角補正値USL及びリンク角マスク値GLMをリンクモータ制御部42へ出力して(ステップS70)、操舵制御処理を終了する。
【0127】
このように、本実施の形態においては、操舵指令情報に含まれる操舵角の微分値を使用する。具体的には、関数f5 に従って算出された逆操舵計算値δSLを使用する。
【0128】
これにより、乗員によるハンドルバー41aの操作、すなわち、操舵初期にのみカウンタステア操作を発生させ、操舵終期にはカウンタステア操作を発生させないようにすることができる。
【0129】
次に、本発明の第3の実施の形態について説明する。なお、第1及び第2の実施の形態と同じ構造を有するものについては、同じ符号を付与することによってその説明を省略する。また、前記第1及び第2の実施の形態と同じ動作及び同じ効果についても、その説明を省略する。
【0130】
図16は本発明の第3の実施の形態における制御系のブロック図、図17は本発明の第3の実施の形態における伝達関数の入力と出力との関係を示す図、図18は本発明の第3の実施の形態における操舵制御処理の動作を示すフローチャートである。
【0131】
本実施の形態における車体傾斜制御処理では、図16に示されるような傾斜制御ECU46による傾斜制御と操舵制御ECU61による操舵制御とを組み合わせた制御が行われる。図16において、G(s)は、カウンタステア操作も含めた操舵操作のゲインを算出するための伝達関数であり、例えば、ラプラス変数sを用いて表現され、次の式(34)で表される。
{1−0.1s}/{1+0.11s+0.001s2 } ・・・式(34)
なお、該式(34)は、次の式(35)に式(36)を乗じることによって得られたものである。
{1−0.1s}/{1+0.01s} ・・・式(35)
1/{1+0.1s} ・・・式(36)
前記式(35)は、ラプラス変数による表現において零点を持つような伝達関数に対応し、前記式(36)は、一次遅れ要素に対応するものであって安定性を補償するために使用される。
【0132】
そして、伝達関数G(s)が前記式(34)で表わされる場合、その入力と出力との関係は、図17のようになる。なお、図17において、横軸は時間(秒)を示し、縦軸はゲイン(無次元)を示している。また、線α1〜α4は入力を示し、線β1〜β4は、それぞれ、線α1〜α4で示される入力に対応する出力を示している。
【0133】
伝達関数G(s)の入力は、ハンドル角センサ値δに対して、ローパスフィルタによる処理を施したものであるから、乗員がハンドルバー41aを操作したことによるハンドル角の変化に対応する。また、伝達関数G(s)の出力は、操舵角目標値δ* に対応する。そして、線α1〜α4の傾斜は、ハンドル角の変化速度を表している。
【0134】
線α1〜α4とそれに対応する線β1〜β4を観ると、ハンドル角の変化速度が速いと、すなわち、乗員がハンドルバー41aを急操作すると、操舵初期に、伝達関数G(s)の出力がマイナスとなる、すなわち、カウンタステア操作が発生することが分かる。また、ハンドル角の変化速度が遅いと、すなわち、乗員がハンドルバー41aを緩操作すると、操舵初期にも、伝達関数G(s)の出力がマイナスとならない、すなわち、カウンタステア操作が発生しないことが分かる。
【0135】
なお、図16に示されるブロック図におけるその他の点については、前記第1の実施の形態で説明した図5と同様であるので、その説明を省略する。
【0136】
また、本実施の形態における横加速度演算処理、リンク角速度推定処理、傾斜制御処理及びリンクモータ制御処理の動作については、前記第1の実施の形態と同様であるので、その説明を省略し、ここでは、本実施の形態における操舵制御処理の動作についてのみ説明する。
【0137】
操舵制御部66は、操舵制御処理を開始すると、ハンドル角センサ62が検出したハンドル角の値であるハンドル角センサ値δを取得し(ステップS71)し、ハンドル角センサ値δに対して、フィルタ処理を実行する(ステップS72)。ここまでの動作については、前記第1の実施の形態における操舵制御処理のステップS41及びS42の動作と同様である。
【0138】
続いて、操舵制御部66は、操舵角目標値δ* を算出する(ステップS73)。ここで、操舵角目標値δ* は次の式(37)によって算出される。
δ* =δG(z) ・・・式(37)
なお、伝達関数G(s)は、連続系の伝達関数なので、そのままでは操舵制御ECU61で計算することができない。そのため、例えば、双一次変換等によって、連続系の伝達関数G(s)は、あらかじめ、離散系の伝達関数G(z)に変換されて使用される。
【0139】
前記伝達関数G(s)(又はG(z))を構成するには次の2つの手順がある。第1の手順は、零点がある一次遅れの伝達関数を準備し、実験的に時定数と零点の値とを調整することである。第2の手順は、ナイキストの安定判別の条件を満たすように、一次遅れの伝達関数を前記第1の手順で準備した伝達関数に乗じて使用することである。
【0140】
なお、車速やヨーレートに応じて、動的に(リアルタイムで)零点の値を変更するようにしてもよい。このときの零点の値は、例えば、車速やヨーレートに応じて実験的に決定された値を二次元マップとして保持し、該二次元マップを計算に使用してもよい。
【0141】
続いて、操舵制御部66は、リンク角補正値USLを算出する(ステップS74)。ここで、リンク角補正値USLは次の式(38)によって算出される。
USL=GSL{δ−δ* } ・・・式(38)
続いて、操舵制御部66は、リンク角マスク値GLMを算出する(ステップS75)。ここで、リンク角マスク値GLMは次の式(39)によって算出される。
GLM=f4 (δ−δ* ) ・・・式(39)
続いて、操舵制御部66は、算出した操舵角目標値δ* を操舵モータ制御部67へ出力する(ステップS76)。
【0142】
最後に、操舵制御部66は、算出したリンク角補正値USL及びリンク角マスク値GLMをリンクモータ制御部42へ出力して(ステップS77)、操舵制御処理を終了する。
【0143】
このように、本実施の形態においては、零点がある一次遅れの伝達関数を使用する。具体的には、伝達関数G(s)(又はG(z))を使用する。これにより、乗員によるハンドルバー41aの操作、すなわち、操舵初期にのみカウンタステア操作を発生させるようにすることができる。
【0144】
なお、本発明は前記実施の形態に限定されるものではなく、本発明の趣旨に基づいて種々変形させることが可能であり、それらを本発明の範囲から排除するものではない。
【産業上の利用可能性】
【0145】
本発明は、少なくとも左右一対の車輪を有する車両に利用することができる。
【符号の説明】
【0146】
10 車両
11 搭乗部
12F、12L、12R 車輪
20 本体部
25 リンクモータ
41a ハンドルバー
65 操舵モータ
【特許請求の範囲】
【請求項1】
互いに連結された操舵部及び本体部を備える車体と、
前記操舵部に回転可能に取り付けられた車輪であって、前記車体を操舵する操舵可能な操舵輪と、
前記本体部に回転可能に取り付けられた車輪であって、操舵不能な非操舵輪と、
操舵指令情報を入力する操舵装置と、
前記操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、
前記操舵装置から入力された操舵指令情報に基づいて前記操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、
前記傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、
該制御装置は、操舵初期に、前記操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させることを特徴とする車両。
【請求項2】
前記制御装置は、操舵初期に、前記操舵指令情報に含まれる操舵方向と反対の方向に前記操舵輪の操舵角を変化させるように操舵用アクチュエータ装置を制御することによって、前記車体の重心を移動させる請求項1に記載の車両。
【請求項3】
前記制御装置は、前記操舵指令情報に含まれる操舵角の微分値を使用することによって、操舵初期にのみ、前記操舵指令情報に含まれる操舵方向と反対の方向に前記操舵輪の操舵角を変化させるように操舵用アクチュエータ装置を制御する請求項2に記載の車両。
【請求項4】
前記操舵初期は、前記操舵指令情報に含まれる操舵角の微分値と前記操舵指令情報に含まれる操舵角の二階微分値との積が零又は正のときである請求項3に記載の車両。
【請求項5】
前記制御装置は、零点がある一次遅れの伝達関数を使用することによって、操舵初期にのみ、前記操舵指令情報に含まれる操舵方向と反対の方向に前記操舵輪の操舵角を変化させるように操舵用アクチュエータ装置を制御する請求項2に記載の車両。
【請求項1】
互いに連結された操舵部及び本体部を備える車体と、
前記操舵部に回転可能に取り付けられた車輪であって、前記車体を操舵する操舵可能な操舵輪と、
前記本体部に回転可能に取り付けられた車輪であって、操舵不能な非操舵輪と、
操舵指令情報を入力する操舵装置と、
前記操舵部又は本体部を旋回方向に傾斜させる傾斜用アクチュエータ装置と、
前記操舵装置から入力された操舵指令情報に基づいて前記操舵輪の操舵角を変化させる操舵用アクチュエータ装置と、
前記傾斜用アクチュエータ装置及び操舵用アクチュエータ装置を制御する制御装置とを有し、
該制御装置は、操舵初期に、前記操舵指令情報に含まれる操舵方向に車体の重心を移動させるように制御して旋回方向内側に向けた加速度を発生させることを特徴とする車両。
【請求項2】
前記制御装置は、操舵初期に、前記操舵指令情報に含まれる操舵方向と反対の方向に前記操舵輪の操舵角を変化させるように操舵用アクチュエータ装置を制御することによって、前記車体の重心を移動させる請求項1に記載の車両。
【請求項3】
前記制御装置は、前記操舵指令情報に含まれる操舵角の微分値を使用することによって、操舵初期にのみ、前記操舵指令情報に含まれる操舵方向と反対の方向に前記操舵輪の操舵角を変化させるように操舵用アクチュエータ装置を制御する請求項2に記載の車両。
【請求項4】
前記操舵初期は、前記操舵指令情報に含まれる操舵角の微分値と前記操舵指令情報に含まれる操舵角の二階微分値との積が零又は正のときである請求項3に記載の車両。
【請求項5】
前記制御装置は、零点がある一次遅れの伝達関数を使用することによって、操舵初期にのみ、前記操舵指令情報に含まれる操舵方向と反対の方向に前記操舵輪の操舵角を変化させるように操舵用アクチュエータ装置を制御する請求項2に記載の車両。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2013−23166(P2013−23166A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−162714(P2011−162714)
【出願日】平成23年7月26日(2011.7.26)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月26日(2011.7.26)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
[ Back to top ]