
車体構造
【課題】車両の乗り心地の向上を図ることができる車体構造を提供する。
【解決手段】車体構造10は、左右の前車輪13,14および左右の後車輪15,16を支持する懸架ユニット18と、懸架ユニット18を支持する主車体部11と、主車体部11に連結されるとともに主車体部11から下方に向けて延出されたアクチュエータユニット21と、アクチュエータユニット21により主車体部11から切り離された状態で吊り下げられた吊下フロア23とを備えている。これにより、吊下フロア23に振動が発生することをアクチュエータユニット21で抑制することができる。
【解決手段】車体構造10は、左右の前車輪13,14および左右の後車輪15,16を支持する懸架ユニット18と、懸架ユニット18を支持する主車体部11と、主車体部11に連結されるとともに主車体部11から下方に向けて延出されたアクチュエータユニット21と、アクチュエータユニット21により主車体部11から切り離された状態で吊り下げられた吊下フロア23とを備えている。これにより、吊下フロア23に振動が発生することをアクチュエータユニット21で抑制することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行状態に対応させて車体フロアの姿勢を調整可能な車体構造に関する。
【背景技術】
【0002】
鉄道車両用の軌道は、曲線部において外側レールを内側レールより高く敷設し、曲線部を車両が規定速度で走行する際に生じる遠心力で車両の乗り心地が損なわれないようにしている。
この曲線部を鉄道車両が走行する際に、例えば、鉄道車両の車速が規定速度より遅い場合がある。この場合、鉄道車両が曲線部を走行する際に生じる遠心力が、規定速度で走行する場合に比べて小さくなり鉄道車両の乗り心地を良好に保ちにくい。
【0003】
この対策として、鉄道車両内の底部に床部を昇降自在に載置し、この床部を油圧シリンダで引上げ可能に構成した鉄道車両が知られている。
また、鉄道車両内の側壁に床部を回動自在に支持し、この床部をアクチュエータで回動させる鉄道車両が知られている。
【0004】
これらの車体構造(以下、「車体構造」という)によれば、例えば、曲線部を規定速度より遅い速度で走行する際に、発生する遠心力に合わせて床部の傾斜角を調整することが可能である。
このように、発生する遠心力に合わせて床部の傾斜角を調整することで車体構造の乗り心地を良好に保つことができる(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平7−172313号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1の車体構造は、床部が車体の底部に載置され、または、車両の側壁に支持されている。すなわち、特許文献1の車体構造では、床部は車体から切り離されていない。
このため、特許文献1の車体構造を、自動車などの車両に適用した場合、車両の走行中に路面からの揺れや振動が車体を経て床部に伝達されることが考えられ、車両の乗り心地を良好に保つことは難しい。
【0007】
ところで、車両のサスペンションとして、いわゆるアクティブサスペンションが一般に知られている。アクティブサスペンションは、サスペンションにアクチュエータが組み込まれ、組み込んだアクチュエータでサスペンションを強制的に伸縮可能に構成されている。
このアクティブサスペンションによれば、アクチュエータでサスペンションを強制的に伸縮させて、路面からの入力により生じる車体の揺れや振動を抑えることが可能である。
【0008】
ここで、路面からの入力は車体全体に伝達されて車体全体に揺れや振動が生じる。車体全体は、重量物であるため揺れや振動による慣性力が大きい。
このため、車体全体の揺れや振動をアクティブサスペンションで十分に抑えることは難しい。
【0009】
ところで、車体構造の乗り心地は、車輪が路面の突起や段差を乗り越える際に車体構造に生じる突上げ方向の「上下ショック」に加えて、「ピッチング」、「バウンシング」または「ローリング」などにより生じる揺れや振動の影響を受ける。
特に、車輪が路面の突起や段差を乗り越える際に生じる「上下ショック」は、車体構造の乗り心地に大きな影響を与えることが知られている。
この「上下ショック」を抑えるためには、アクティブサスペンションで車体構造を下降させる必要がある。
【0010】
しかし、アクティブサスペンションは、通常、車体構造をサスペンションで下側から上方に向けて支えている。
このため、「上下ショック」などに対応させて車体構造を迅速に下降させることが難しい。
【0011】
本発明は、車両の乗り心地の向上を図ることができる車体構造を提供することを課題とする。
【課題を解決するための手段】
【0012】
請求項1に係る発明は、車輪を支持する懸架ユニットと、前記懸架ユニットを支持する主車体部と、前記主車体部に連結されるとともに前記主車体部から下方に向けて延出されたアクチュエータと、前記アクチュエータで吊り下げられるとともに前記主車体部から切り離された吊下フロアと、を備え、前記吊下フロアに前記主車体部から揺れ、振動が伝達することを前記アクチュエータで抑制可能としたことを特徴とする。
【0013】
請求項2は、前記アクチュエータは、前記吊下フロアを所定の吊下位置で保持可能な機能と、前記吊下フロアの保持状態を解除して前記吊下フロアの自重により伸張可能な機能と、前記吊下フロアの保持状態を解除して縮小可能な機能と、を備えたことを特徴とする。
【0014】
請求項3は、前記車輪の近傍に前記アクチュエータを備え、前記アクチュエータの保持状態、伸張状態、縮小状態を制御する制御部を備え、前記制御部は、前記車輪が路面の突起や段差路面を乗り越える際に、前記車輪の近傍に設けられた前記アクチュエータを解放状態に所定時間制御可能とし、前記解放状態のアクチュエータを前記吊下フロアの自重により伸張させることを特徴とする。
【発明の効果】
【0015】
請求項1に係る発明では、主車体部から吊下フロアを切り離し、切り離した吊下フロアをアクチュエータで下方に吊り下げるようにした。
主車体部から吊下フロアを切り離すことで吊下フロアの重量を軽減できる。吊下フロアの重量を軽減することで、吊下フロアの慣性力を小さくできる。
これにより、車両の走行中の「ピッチング」、「バウンシング」または「ローリング」などで主車体部に伝達された揺れや振動が吊下フロアに伝わることをアクチュエータで十分に抑制できる。
【0016】
ここで、「ピッチング」は、一例として、車両の走行中のブレーキ操作(制動操作)により生じることが考えられる。
また、「バウンシング」は、一例として、路面の凹凸部を走行する際に生じることが考えられる。
さらに、「ローリング」は、一例として、車両の走行中の旋回操作により生じることが考えられる。
【0017】
さらに、主車体部から吊下フロアを切り離し、切り離した吊下フロアをアクチュエータで下方に吊り下げるようにした。よって、車輪が路面の突起や段差を乗り越える際に、吊下フロアやシートの自重を利用して吊下フロアを効率よく下降させることができる。
吊下フロアを効率よく下降させることで、車輪が路面の突起や段差を乗り越える際に、主車体部に伝達された突上げ方向の「いわゆる、上下ショック」が吊下フロアに伝わることを抑制できる。
【0018】
このように、主車体部から吊下フロアを切り離し、切り離した吊下フロアをアクチュエータで吊り下げることで、吊下フロアに揺れや振動が伝わることを抑え、かつ、「上下ショック」が吊下フロアに伝わることを抑えることが可能になり、車両(車体構造)の乗り心地の向上を図ることができる。
【0019】
請求項2に係る発明では、アクチュエータに保持機能、伸張機能および縮小機能を備えた。よって、車両の静止時や直進走行中には、アクチュエータの保持機能で吊下フロアを所定の吊下位置に保持できる。
これにより、吊下フロアの高さを一定に保つとともに、水平に保つことができる。
【0020】
さらに、車両の走行中に「ピッチング」、「バウンシング」または「ローリング」などで揺れや振動が生じた際には、アクチュエータの伸張機能や縮小機能で吊下フロアを水平に保つことができる。
このように、アクチュエータに保持機能、伸張機能および縮小機能を備えることで、車両の静止状態や走行状態に応じて吊下フロアを水平に制御することが可能になり、車両(車体構造)の乗り心地の向上を図ることができる。
【0021】
また、伸張機能でアクチュエータを伸張させる際には、吊下フロアおよびシートの自重を利用して吊下フロアを下降(自然下降)させることができる。
これにより、アクチュエータを駆動させて伸張させる必要がないので、省エネルギー化(低燃費化)を図ることができる。
【0022】
請求項3に係る発明では、車輪が路面の突起や段差を乗り越える際に、車輪の近傍に設けられたアクチュエータを所定時間解放(フリーな)状態(すなわち、伸張状態)に保つようにした。
アクチュエータを所定時間解放状態に保つことで、アクチュエータによる主車体部および吊下フロア間の連結を所定時間切り離すことができる。
ここで、アクチュエータを所定時間解放状態に保つことで、吊下フロアやシートの自重を利用して吊下フロアを下降させることができる。
【0023】
また、例えば、車両の直進走行中において吊下フロアを水平状態に保つように吊下フロアに慣性力が作用している。
これにより、車輪が路面の突起や段差を乗り越える際に、主車体部に突上げ方向の「上下ショック」が伝達しても、吊下フロアを水平状態に保つことが可能になり車両(車体構造)の乗り心地の向上を図ることができる。
【図面の簡単な説明】
【0024】
【図1】本発明に係る車体構造(実施例1)を示す概略側面図である。
【図2】図1の車体構造を示す正面図である。
【図3】実施例1の車体構造が「ピッチング」状態の場合に吊下フロアを水平状態に保つ例を説明する図である。
【図4】実施例1の車体構造が「ローリング」状態の場合に吊下フロアを水平状態に保つ例を説明する図である。
【図5】実施例1の車体構造が「バウンシング」状態の場合に吊下フロアを水平状態に保つ例を説明する図である。
【図6】実施例1の車体構造左前車輪が路面の凸部に乗り上げた場合に吊下フロアを水平状態に保つ例を説明する図である。
【図7】本発明に係る車体構造(実施例2)を示す概略側面図である。
【発明を実施するための形態】
【0025】
本発明を実施するための最良の形態を添付図に基づいて以下に説明する。なお、「前(Fr)」、「後(Rr)」、「左(L)」、「右(R)」は運転者から見た方向にしたがう。
【実施例1】
【0026】
実施例1に係る車体構造10について説明する。
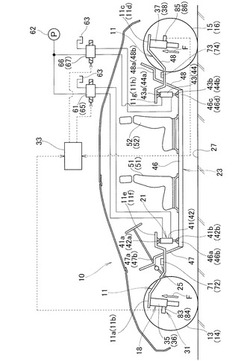
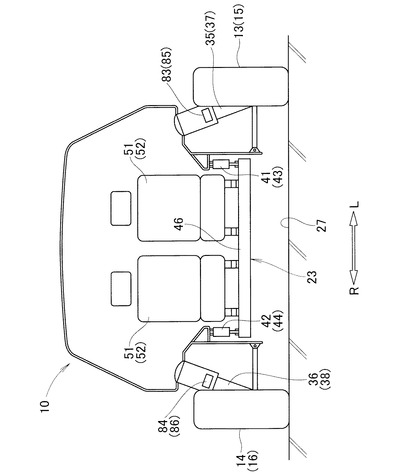
図1、図2に示すように、車体構造10は、主車体部11の下方に配置された左右の前車輪(車輪)13,14および左右の後車輪(車輪)15,16と、左右の前車輪13,14および左右の後車輪15,16を支持する懸架ユニット18と、懸架ユニット18を支持する主車体部11と、主車体部11に設けられたアクチュエータユニット21と、アクチュエータユニット21で吊り下げられた吊下フロア(車体フロア)23と、吊下フロア23を下降させた状態で支えるフロア支持手段25とを備えている。
【0027】
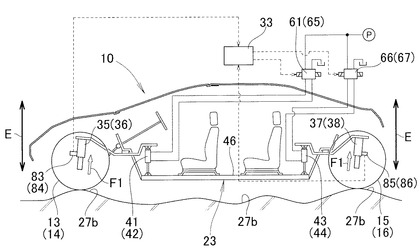
さらに、車体構造10は、路面27の突起や段差路面(凸部)27a(図6参照)を検知する検知手段31と、検知手段31からの検知信号に基づいてアクチュエータユニット21を制御する制御部33とを備えている。
【0028】
懸架ユニット18は、主車体部11の左前部11aに設けられて左前車輪13を支持する左前懸架手段35と、主車体部11の右前部11bに設けられて右前車輪14を支持する右前懸架手段36と、主車体部11の左後部11cに設けられて左後車輪15を支持する左後懸架手段37と、主車体部11の右後部11dに設けられて右後車輪16を支持する右後懸架手段38とを備えている。
【0029】
主車体部11は、左前懸架手段35を支持する左前部11aと、右前懸架手段36を支持する右前部11bと、左後懸架手段37を支持する左後部11cと、右後懸架手段38を支持する右後部11dと、アクチュエータユニット21を支えるアクチュエータ支持部(具体的には、左右の前支持部11e,11f、左右の後支持部11g,11h)とを備えている。
【0030】
アクチュエータユニット21は、左前アクチュエータ(アクチュエータ)41と、右前アクチュエータ(アクチュエータ)42と、左後アクチュエータ(アクチュエータ)43と、右後アクチュエータ(アクチュエータ)44とを備えている。
【0031】
アクチュエータ支持部の左前支持部11eは、左前アクチュエータ41の上端部(シリンダエンド)41aを主車体部11から支持する部位である。
アクチュエータ支持部の右前支持部11fは、右前アクチュエータ42の上端部(シリンダエンド)42aを主車体部11から支持する部位である。
アクチュエータ支持部の左後支持部11gは、左後アクチュエータ43の上端部(シリンダエンド)43aを主車体部11から支持する部位である。
アクチュエータ支持部の右後支持部11hは、右後アクチュエータ44の上端部(シリンダエンド)44aを主車体部11から支持する部位である。
【0032】
主車体部11から吊下フロア23が切り離されている。
吊下フロア23は、主車体部11から切り離された状態で単独に昇降可能な部材である。
この吊下フロア23は、路面27に対峙するように水平に設けられた床部46と、床部46の前端部に設けられた前仕切壁47と、床部46の後端部に設けられた後仕切壁48とを有する。
【0033】
床部46は、左前端部46aに左前アクチュエータ41の下端部(ロッドエンド)41bが連結され、右前端部46bに右前アクチュエータ42の下端部(ロッドエンド)42bが連結され、左後端部46cに左後アクチュエータ43の下端部(ロッドエンド)43bが連結され、右後端部46dに右後アクチュエータ44の下端部(ロッドエンド)44bが連結されている。
この床部46には、左右の前シート51および左右の後シート52が設けられている。
【0034】
すなわち、吊下フロア23は、主車体部11から切り離された状態で、左右の前アクチュエータ41,42および左右の後アクチュエータ43,44を介して吊下フロア23の左右の前支持部11e,11fおよび左右の後支持部11g,11hにそれぞれ吊り下げられている。
【0035】
主車体部11から吊下フロア23を切り離すことで吊下フロア23の重量を軽減できる。吊下フロア23の重量を軽減することで、吊下フロア23の慣性力を小さくできる。
さらに、全体の車両慣性を軽減できる。加えて、振動する車体全体を2つに分離することで主車体部11そのものの振動も軽減できる。
これにより、車両の走行中の「ピッチング」、「バウンシング」または「ローリング」などで主車体部11に伝達された揺れや振動が吊下フロア23に伝わることを左右の前アクチュエータ41,42および左右の後アクチュエータ43,44で十分に抑制できる。
【0036】
左前アクチュエータ41は、左前支持部11eに上端部41aが連結されるとともに、左前支持部11eから下方に向けて延出されている。
左前アクチュエータ41は、シリンダおよびピストンロッドを備えた通常の油圧シリンダである。
この左前アクチュエータ41は、左前車輪13の近傍に設けられ、かつ、左前懸架手段35に対して車幅方向内側(車幅方向中心側)に配置されるとともに、車両前後方向内側(車両後方側)に配置されている。
【0037】
左前アクチュエータ41に左前電磁弁(左前方向切替弁)61を介してポンプ62が連通されている。
左前電磁弁61は、制御部33からの切替信号に基づいて、左前アクチュエータ41を保持状態に保つ保持位置、左前アクチュエータ41を縮小状態に保つ縮小位置、左前アクチュエータ41を伸張状態に保つ伸張位置に切替可能なバルブである。
【0038】
具体的には、左前電磁弁61を保持位置に切り替えることで、左前アクチュエータ41とポンプ62との連通を遮断するとともに、左前アクチュエータ41とタンク63との連通を遮断する。
よって、左前アクチュエータ41内の作動オイルを左前アクチュエータ41内に保持して、左前アクチュエータ41(ピストンロッド)を静止状態(保持状態)に保つことができる。
すなわち、左前アクチュエータ41は、吊下フロア23を所定の吊下位置で保持可能な機能(保持機能)を備えている。
【0039】
また、左前電磁弁61を縮小位置に切り替えることで、左前アクチュエータ41のシリンダヘッド側にポンプ62を連通するとともに、シリンダキャップ側にタンク63を連通する。
よって、ポンプ62からシリンダヘッド側に作動オイルを供給して、左前アクチュエータ41のピストンロッドをシリンダ内に後退させて左前アクチュエータ41を縮小状態に保つことができる。
すなわち、左前アクチュエータ41は、吊下フロア23の保持状態を解除して縮小可能な機能を備えている。
【0040】
さらに、左前電磁弁61を伸張位置に切り替えることで、左前アクチュエータ41のシリンダキャップ側をシリンダヘッド側に連通する。
この状態で、左前アクチュエータ41の下端部41bに、吊下フロア23の自重が下向きに作用するとともに左右の前シート51および左右の後シート52の自重が下向きに作用している。
【0041】
よって、吊下フロア23の自重、左右の前シート51および左右の後シート52の自重で左前アクチュエータ41のロッドをシリンダから進出させて左前アクチュエータ41を伸張状態に保つことができる。
すなわち、左前アクチュエータ41は、吊下フロア23の保持状態を解除して吊下フロア23の自重、左右の前シート51および左右の後シート52の自重により伸張可能な機能を備えている。
【0042】
右前アクチュエータ42は、右前支持部11fに上端部42aが連結されるとともに、右前支持部11fから下方に向けて延出された油圧シリンダである。
この右前アクチュエータ42は、右前車輪14の近傍に設けられ、かつ、右前懸架手段36に対して車幅方向内側(車幅方向中心側)に配置されるとともに、車両前後方向内側(車両後方側)に配置されている。
【0043】
右前アクチュエータ42は、左前アクチュエータ41と同様に、右前電磁弁(右前方向切替弁)65を介してポンプ62やタンク63に連通されている。
右前電磁弁65は、左前電磁弁61と同じバルブである。
よって、右前アクチュエータ42は、左前アクチュエータ41と同様に、保持可能な機能、縮小可能な機能(縮小機能)、および伸張可能な機能(伸張機能)を備えている。
【0044】
左後アクチュエータ43は、左後支持部11gに上端部43aが連結されるとともに、左後支持部11gから下方に向けて延出された油圧シリンダである。
この左後アクチュエータ43は、左後車輪15の近傍に設けられ、かつ、左後懸架手段37に対して車幅方向内側(車幅方向中心側)に配置されるとともに、車両前後方向内側(車両前方側)に配置されている。
【0045】
左後アクチュエータ43は、左前アクチュエータ41と同様に、左後電磁弁(左後方向切替弁)66を介してポンプ62やタンク63に連通されている。
左後電磁弁66は、左前電磁弁61と同じバルブである。
よって、左後アクチュエータ43は、左前アクチュエータ41と同様に、保持可能な機能、縮小可能な機能、および伸張可能な機能を備えている。
【0046】
右後アクチュエータ44は、右後支持部11hに上端部44aが連結されるとともに、右後支持部11hから下方に向けて延出された油圧シリンダである。
この右後アクチュエータ44は、右後車輪16の近傍に設けられ、かつ、右後懸架手段38に対して車幅方向内側(車幅方向中心側)に配置されるとともに、車両前後方向内側(車両前方側)に配置されている。
【0047】
右後アクチュエータ44は、左前アクチュエータ41と同様に、右後電磁弁(右後方向切替弁)67を介してポンプ62やタンク63に連通されている。
右後電磁弁67は、左前電磁弁61と同じバルブである。
よって、右後アクチュエータ44は、左前アクチュエータ41と同様に、保持可能な機能、縮小可能な機能、および伸張可能な機能を備えている。
【0048】
このように、アクチュエータ41〜44に保持機能、伸張機能および縮小機能が備えられている。
よって、車両(車体構造10)の静止時や直進走行中には、アクチュエータ41〜44の保持機能で吊下フロア23を所定の吊下位置に保持できる。
これにより、吊下フロア23の高さを一定に保つとともに、水平に保つことができる。
【0049】
さらに、車体構造10の走行中に「ピッチング」、「バウンシング」または「ローリング」などで揺れや振動が生じた際には、アクチュエータ41〜44の伸張機能や縮小機能で吊下フロアを水平に保つことができる。
このように、アクチュエータ41〜44に保持機能、伸張機能および縮小機能を備えることで、車体構造10の静止状態や走行状態に応じて吊下フロア23を水平に制御することが可能になり、車両(車体構造10)の乗り心地の向上を図ることができる。
【0050】
また、伸張機能でアクチュエータ41〜44を伸張させる際には、吊下フロア23の自重や、左右の前シート51および左右の後シート52の自重を利用して吊下フロア23を下降(自然下降)させることができる。
これにより、アクチュエータ41〜44を駆動させて伸張させる必要がないので、省エネルギー化(低燃費化)を図ることができる。
【0051】
フロア支持手段25は、左前アクチュエータ41の近傍(主車体部11の左前部11a近傍)に備えた左前フロア支持部71と、右前アクチュエータ42の近傍(主車体部11の右前部11b近傍)に備えた右前フロア支持部72と、左後アクチュエータ43の近傍(主車体部11の左後部11c近傍)に備えた左後フロア支持部73と、右後アクチュエータ44の近傍(主車体部11の右後部11d近傍)に備えた右後フロア支持部74とを備えている。
【0052】
左前フロア支持部71は、スプリングやゴムなどの減衰支持部であり、吊下フロア23や左右の前シート51および左右の後シート52の自重で左前アクチュエータ41を伸張させたとき、吊下フロア23(前仕切壁47)の左前当接部47aが載置される部材である。
この左前フロア支持部71は、左前アクチュエータ41の伸張ストロークが最大長さに到達する前に、吊下フロア23の左前当接部47aが載置されるように形成されている。
左前フロア支持部71に左前当接部47aが載置された状態において、左前当接部47aの揺れや振動を左前フロア支持部71で減衰することができる。
【0053】
右前フロア支持部72、左後フロア支持部73および右後フロア支持部74は、左前フロア支持部71と同様の部材であり、詳しい説明を省略する。
すなわち、右前フロア支持部72は、右前アクチュエータ42の伸張ストロークが最大長さに到達する前に、吊下フロア23(前仕切壁47)の右前当接部47bが載置されるように形成されている。
右前フロア支持部72に右前当接部47bが載置された状態において、右前当接部47bの揺れや振動を右前フロア支持部72で減衰することができる。
【0054】
また、左後フロア支持部73は、左後アクチュエータ43の伸張ストロークが最大長さに到達する前に、吊下フロア23(後仕切壁48)の左後当接部48aが載置されるように形成されている。
左後フロア支持部73に左後当接部48aが載置された状態において、左後当接部48aの揺れや振動を左後フロア支持部73で減衰することができる。
【0055】
さらに、右後フロア支持部74は、右後アクチュエータ44の伸張ストロークが最大長さに到達する前に、吊下フロア23(後仕切壁48)の右後当接部48bが載置されるように形成されている。
右後フロア支持部74に右後当接部48bが載置された状態において、右後当接部48bの揺れや振動を右後フロア支持部74で減衰することができる。
【0056】
検知手段31は、路面27から左前懸架手段35に作用する「突上入力」Fなどを検知する左前G感知センサー83と、路面27から右前懸架手段36の「突上入力」Fなどを検知する右前G感知センサー84と、路面27から左後懸架手段37の「突上入力」Fなどを検知する左後G感知センサー85と、路面27から右後懸架手段38の「突上入力」Fなどを検知する右後G感知センサー86とを備えている。
【0057】
ここで、左右の前懸架手段35,36や左右の後懸架手段37,38に「突上入力」Fが作用した場合、例えば、車両の走行中に「いわゆる、上下ショック」や「バウンシング」が生じることが考えられる。
【0058】
左前G感知センサー83は、左前懸架手段35に設けられている。
この左前G感知センサー83は、左前懸架手段35に作用する路面27からの「突上入力」Fを検知し、検出した突上信号を制御部33に伝えるセンサーである。
さらに、左前G感知センサー83は、車両の走行中に「ピッチング」や「ローリング」が生じた際に、左前懸架手段35に作用する荷重を検知し、検出した荷重信号を制御部33に伝えるセンサーである。
【0059】
右前G感知センサー84は、右前懸架手段36に設けられている。
この右前G感知センサー84は、左前G感知センサー83と同様に、右前懸架手段36に作用する路面からの「突上入力」Fを検知し、検出した突上信号を制御部33に伝えるセンサーである。
さらに、右前G感知センサー84は、車両の走行中に「ピッチング」や「ローリング」が生じた際に、右前懸架手段36に作用する荷重を検知し、検出した荷重信号を制御部33に伝えるセンサーである。
【0060】
左後G感知センサー85は、左後懸架手段37に設けられている。
この左後G感知センサー85は、左後懸架手段37に作用する路面からの「突上入力」Fを検知し、検出した突上信号を制御部33に伝えるセンサーである。
さらに、左後G感知センサー85は、車両の走行中に「ピッチング」や「ローリング」が生じた際に、左後懸架手段37に作用する荷重を検知し、検出した荷重信号を制御部33に伝えるセンサーである。
【0061】
右後G感知センサー86は、右後懸架手段38に設けられている。
この右後G感知センサー86は、左前G感知センサー83と同様に、右後懸架手段38に作用する路面27からの「突上入力」Fを検知し、検出した突上信号を制御部33に伝えるセンサーである。
さらに、右後G感知センサー86は、車両の走行中に「ピッチング」や「ローリング」が生じた際に、右後懸架手段38に作用する荷重を検知し、検出した荷重信号を制御部33に伝えるセンサーである。
【0062】
制御部33は、左右の前G感知センサー83,84や左右の後G感知センサー85,86から伝えられた検知信号に基づいて車両が「ピッチング」、「バウンシング」または「ローリング」状態であるか、「上下ショック」状態であるかを判断する。
【0063】
制御部33において、車両が「ピッチング」、「バウンシング」または「ローリング」状態であると判断した場合、左右の前G感知センサー83,84や左右の後G感知センサー85,86から伝えられた検知信号に基づいて、吊下フロア23を水平に保つ切替信号を左右の前電磁弁61,65や左右の後電磁弁66,67に伝える。
左右の前電磁弁61,65や左右の後電磁弁66,67を切り替えることで、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を保持状態、伸張状態または縮小状態に制御して吊下フロア23の床部46を水平に保つことができる。
【0064】
一方、制御部33において、「上下ショック」状態であると判断した場合、左右の前G感知センサー83,84や左右の後G感知センサー85,86から伝えられた検知信号に基づいて、吊下フロア23を水平に保つ切替信号を左右の前電磁弁61,65や左右の後電磁弁66,67に伝える。
【0065】
左右の前電磁弁61,65や左右の後電磁弁66,67を切り替えることで、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を解放(フリーな)状態に所定時間制御可能である。
解放状態に所定時間制御することで、吊下フロア23の床部46を水平に保つことができる。
【0066】
すなわち、制御部33は、左右の前車輪13,14および左右の後車輪15,16のいずれかの車輪が路面27の凸部27a(図6参照)を乗り越える際に、凸部27aを乗り越える車輪の近傍に設けられたアクチュエータを解放状態に所定時間制御可能である。
さらに、前述したように、主車体部11から吊下フロア23が切り離され、切り離した吊下フロア23がアクチュエータ41〜44で下方に吊り下げられている。
【0067】
この状態で、アクチュエータを解放状態(フリーな状態)に所定時間制御することで、吊下フロア23を浮揚状態にする。
そして、吊下フロア23の自重や左右の前シート51および左右の後シート52の自重を利用して浮揚状態の吊下フロア23を効率よく下降(自然下降)させることができる。
すなわち、解放状態のアクチュエータを、吊下フロア23の自重や左右の前シート51および左右の後シート52の自重により伸張させることができる。
【0068】
吊下フロア23を効率よく下降させることで、車輪が路面27の凸部27a(図6参照)を乗り越える際に、主車体部11に伝達された突上げ方向の「いわゆる、上下ショック」が吊下フロア23に伝わることを抑制できる。
このように、主車体部11から吊下フロア23を切り離し、切り離した吊下フロア23をアクチュエータ41〜44で吊り下げることで、吊下フロア23に揺れや振動が伝わることを抑え、かつ、「上下ショック」が吊下フロア23に伝わることを抑えることが可能になり、車両(車体構造10)の乗り心地の向上を図ることができる。
【0069】
このように、制御部33で左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を制御することで、車両(車体構造10)の走行状態に対応させて吊下フロア23の姿勢を調整することができる。
【0070】
つぎに、車両が「ピッチング」状態の場合に吊下フロア23の床部46を水平状態に保つ例を図3に基づいて説明する。
図3に示すように、一例として、車両の走行中のブレーキ操作(制動操作)により車体に「ピッチング」が生じることが考えられる。
車両の走行中に車体に「ピッチング」が生じることで、車体が矢印Aの如く前傾したり、車体が矢印Bの如く後傾する。車体が「ピッチング」することで、左右の前懸架手段35,36や左右の後懸架手段37,38に荷重が作用する。
【0071】
左右の前懸架手段35,36や左右の後懸架手段37,38に作用した荷重を左右の前G感知センサー83,84や左右の後G感知センサー85,86で検知する。
左右の前G感知センサー83,84や左右の後G感知センサー85,86から制御部33に検知信号が伝えられる。制御部33は、伝えられた検知信号に基づいて車両が「ピッチング」状態であると判断する。
【0072】
「ピッチング」状態であると判断した後、制御部33から左右の前電磁弁61,65や左右の後電磁弁66,67に切替信号を伝える。
左右の前電磁弁61,65や左右の後電磁弁66,67が切り替わることにより、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を保持状態、伸張状態または縮小状態に制御することで吊下フロア23の床部46を水平に保つ。
吊下フロア23の床部46を水平に保つことで、車両(車体構造10)の乗り心地の向上を図ることができる。
【0073】
つぎに、車両が「ローリング」状態の場合に吊下フロア23の床部46を水平状態に保つ例を図4に基づいて説明する。
図4に示すように、一例として、車両の走行中の旋回操作により車体に「ローリング」が生じることが考えられる。
車両の走行中に車体に「ローリング」が生じることで、車体が矢印Cの如く車幅方向右側に傾斜したり、車体が矢印Dの如く車幅方向左側に傾斜する。車体が「ローリング」することで、左右の前懸架手段35,36や左右の後懸架手段37,38に荷重が作用する。
【0074】
左右の前懸架手段35,36や左右の後懸架手段37,38に作用した荷重を左右の前G感知センサー83,84や左右の後G感知センサー85,86で検知する。
左右の前G感知センサー83,84や左右の後G感知センサー85,86から制御部33(図3参照)に検知信号が伝えられる。制御部33は、伝えられた検知信号に基づいて車両が「ローリング」状態であると判断する。
【0075】
「ローリング」状態であると判断した後、制御部33から左右の前電磁弁61,65や左右の後電磁弁66,67(図3参照)に切替信号を伝える。
左右の前電磁弁61,65や左右の後電磁弁66,67が切り替わることにより、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を保持状態、伸張状態または縮小状態に制御することで吊下フロア23の床部46を水平に保つ。
吊下フロア23の床部46を水平に保つことで、車両(車体構造10)の乗り心地の向上を図ることができる。
【0076】
ついで、車両が「バウンシング」状態の場合に吊下フロア23の床部46を水平状態に保つ例を図5に基づいて説明する。
図5に示すように、車両が路面27の凹凸部27bを走行中に車体が「バウンシング」、すなわち、車体全体が矢印Eの如く上下方向にバウンドすることが考えられる。
凹凸部27bから左右の前車輪13,14や左右の後車輪15,16を経て左右の前懸架手段35,36や左右の後懸架手段37,38に「突上入力」F1が矢印の如く作用する。
【0077】
左右の前懸架手段35,36や左右の後懸架手段37,38に作用した「突上入力」F1を左右の前G感知センサー83,84や左右の後G感知センサー85,86で検知する。
左右の前G感知センサー83,84や左右の後G感知センサー85,86から制御部33に伝えられた検知信号に基づいて、制御部33において車両が「バウンシング」状態であると判断する。
【0078】
「バウンシング」状態であると判断した後、制御部33から左右の前電磁弁61,65や左右の後電磁弁66,67に切替信号を伝える。
左右の前電磁弁61,65や左右の後電磁弁66,67が切り替わることにより、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を保持状態、伸張状態または縮小状態に制御することで吊下フロア23の床部46を水平に保つ。
吊下フロア23の床部46を水平に保つことで、車両(車体構造10)の乗り心地の向上を図ることができる。
【0079】
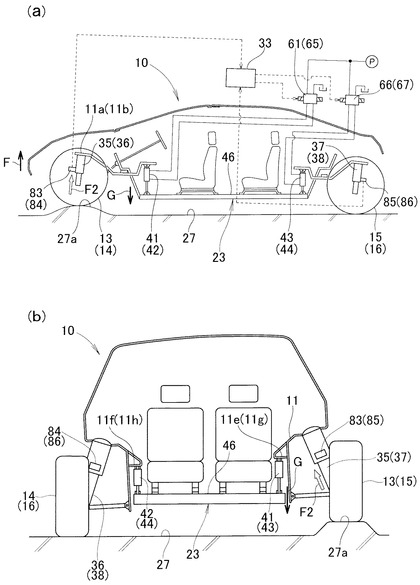
つぎに、車体構造10の左前車輪13が路面27の凸部27aに乗り上げた場合に吊下フロア23の床部46を水平状態に保つ例を図6に基づいて説明する。
図6(a),(b)に示すように、車両の左前車輪13が路面27の凸部27aに乗り上げることにより、凸部27aから左前車輪13を経て左前懸架手段35に「突上入力」F2が矢印の如く作用する。
左前懸架手段35に「突上入力」F2が作用することで、主車体部11の左前部11aが矢印Fの如く上昇する。
【0080】
同時に、左前懸架手段35に作用した「突上入力」F2を左前G感知センサー83で検知し、検知した検知信号を制御部33に伝える。
左前G感知センサー83から伝えられた検知信号に基づいて、制御部33において車両が「上下ショック」状態であると判断する。
【0081】
「上下ショック」状態であると判断した後、制御部33から左前電磁弁61に切替信号を伝える。左前電磁弁61が解放位置に切り替わることにより、左前アクチュエータ41を解放状態(すなわち、伸張状態)に所定時間制御する。
左前アクチュエータ41を解放状態に所定時間制御することで、左前アクチュエータ41による主車体部11および吊下フロア23間の連結を所定時間切り離すことができる。
よって、吊下フロア23の自重、左右の前シート51および左右の後シート52の自重で左前アクチュエータ41を矢印Gの如く伸張する。
【0082】
左前アクチュエータ41が伸張することで、吊下フロア23(床部46)の左前端部46aを矢印Gの如く下降させることができる。
さらに、例えば、車両(車体構造10)の直進走行中において吊下フロア23を水平状態に保つように吊下フロア23に慣性力が作用している。
これにより、車体構造10が路面27の凸部27aを乗り越える際に、主車体部11に突上げ方向の「上下ショック」が伝達しても、吊下フロア23を水平状態に保つことが可能になり車体構造10の乗り心地の向上を図ることができる。
【0083】
左前アクチュエータ41を解放状態に所定時間制御した後、すなわち所定時間経過した後、制御部33で吊下フロア23の床部46が水平に保たれているか否かを判断する。
制御部33で吊下フロア23の床部46が水平に保たれていると判断した場合、制御部33から左右の前電磁弁61,65や左右の後電磁弁66,67に保持状態に切り替える切替信号を伝える。
よって、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を保持状態に制御して吊下フロア23の床部46を水平に保つことができる。
【0084】
一方、制御部33で吊下フロア23の床部46が水平に保たれていないと判断した場合、吊下フロア23の床部46を水平に保つことができる切替信号を、制御部33から左右の前電磁弁61,65や左右の後電磁弁66,67に伝える。
左右の前電磁弁61,65や左右の後電磁弁66,67を切り替えることで、吊下フロア23の床部46を水平に保つことができる。
【0085】
なお、図6(a),(b)では、車両の左前車輪13のみが路面27の凸部27aに乗り上げた例について説明したが、左右の前車輪13,14が路面27の凸部27aに乗り上げた場合も同様の効果が得られる。
すなわち、左右の前車輪13,14が路面27の凸部27aに乗り上げて、主車体部11に突上げ方向の「上下ショック」が伝達する。
この場合、左右の前アクチュエータ41,42を解放状態(フリーの状態)にすることで、「突上入力」を吊下フロア23から遮断するとともに、吊下フロア23を水平状態に保つことで乗り心地の向上を図ることができる。
【0086】
つぎに、実施例2を図7に基づいて説明する。なお、実施例2において実施例1と同一・類似部材については同じ符号を付して説明を省略する。
【実施例2】
【0087】
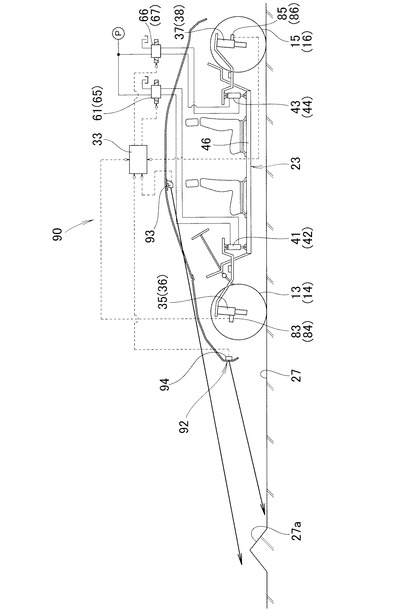
実施例2に係る車体構造90について説明する。
図7に示すように、車体構造90は、実施例1の車体構造10に路面監視システム92を備えたもので、その他の構成は実施例1の車体構造10と同様である。
【0088】
路面監視システム92は、車両の前方を監視する撮像カメラ93と、車両の前方を監視するレーダーセンサー94とを備え、車両前方の路面27の監視データを制御部33に伝えるシステムである。
【0089】
すなわち、撮像カメラ93は、路面27を撮像した画像データを制御部33に伝える装置である。
撮像カメラ93から伝えられた画像データを制御部33で画像処理し、路面27に凸部27aがあるか否かを判断する。
【0090】
レーダーセンサー94は、発信した電波を路面27で反射させ、路面27で反射した電波を受信し、このデータを制御部33に伝えるセンサーである。
レーダーセンサー94から伝えられたデータに基づいて制御部33で路面27に凸部27aがあるか否かを判断する。
【0091】
このように、路面監視システム92を備えることで路面監視システム92の監視データに基づいて、路面27に凸部27aがあるか否かを車輪が凸部27aに乗り上げる前に予測することができる。
よって、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を車輪が凸部27aに乗り上げる前に作動させることが可能になる。
これにより、各アクチュエータ41,42,43,44を路面27の凸部27aに合わせて高精度に制御可能になり、吊下フロア23の床部46を一層好適に水平に保ち、車両の乗り心地の向上をさらに図ることができる。
【0092】
なお、本発明に係る車体構造は、前述した実施例1,2に限定されるものではなく適宜変更、改良などが可能である。
例えば、前記実施例1,2では、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44として油圧シリンダを用いた例について説明したが、これに限らないで、電気モータなどの他のアクチュエータを用いることが可能である。
【0093】
また、前記実施例1,2では、アクチュエータユニット21として左右の前車輪13,14および左右の後車輪15,16の近傍に左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を4個設けた例について説明したが、これに限らないで、アクチュエータの個数やアクチュエータの配置箇所を任意に選択することも可能である。
【0094】
さらに、前記実施例1,2で示した車体構造10、主車体部11、左右の前車輪13,14、左右の後車輪15,16、吊下フロア23、制御部33、左前アクチュエータ41、右前アクチュエータ42、左後アクチュエータ43および右後アクチュエータ44などの形状や構成は例示したものに限定するものではなく適宜変更が可能である。
【産業上の利用可能性】
【0095】
本発明は、車両の走行状態に対応させて車体フロアの姿勢をアクチュエータで調整可能な車体構造を備えた自動車への適用に好適である。
【符号の説明】
【0096】
10…車体構造、11…主車体部、13,14…左右の前車輪(車輪)、15,16…左右の後車輪(車輪)、21…アクチュエータユニット、23…吊下フロア、27…路面、27a…突起や段差路面(凸部)、33…制御部、41…左前アクチュエータ(アクチュエータ)、42…右前アクチュエータ(アクチュエータ)、43…左後アクチュエータ(アクチュエータ)、44…右後アクチュエータ(アクチュエータ)。
【技術分野】
【0001】
本発明は、車両の走行状態に対応させて車体フロアの姿勢を調整可能な車体構造に関する。
【背景技術】
【0002】
鉄道車両用の軌道は、曲線部において外側レールを内側レールより高く敷設し、曲線部を車両が規定速度で走行する際に生じる遠心力で車両の乗り心地が損なわれないようにしている。
この曲線部を鉄道車両が走行する際に、例えば、鉄道車両の車速が規定速度より遅い場合がある。この場合、鉄道車両が曲線部を走行する際に生じる遠心力が、規定速度で走行する場合に比べて小さくなり鉄道車両の乗り心地を良好に保ちにくい。
【0003】
この対策として、鉄道車両内の底部に床部を昇降自在に載置し、この床部を油圧シリンダで引上げ可能に構成した鉄道車両が知られている。
また、鉄道車両内の側壁に床部を回動自在に支持し、この床部をアクチュエータで回動させる鉄道車両が知られている。
【0004】
これらの車体構造(以下、「車体構造」という)によれば、例えば、曲線部を規定速度より遅い速度で走行する際に、発生する遠心力に合わせて床部の傾斜角を調整することが可能である。
このように、発生する遠心力に合わせて床部の傾斜角を調整することで車体構造の乗り心地を良好に保つことができる(例えば、特許文献1参照。)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平7−172313号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1の車体構造は、床部が車体の底部に載置され、または、車両の側壁に支持されている。すなわち、特許文献1の車体構造では、床部は車体から切り離されていない。
このため、特許文献1の車体構造を、自動車などの車両に適用した場合、車両の走行中に路面からの揺れや振動が車体を経て床部に伝達されることが考えられ、車両の乗り心地を良好に保つことは難しい。
【0007】
ところで、車両のサスペンションとして、いわゆるアクティブサスペンションが一般に知られている。アクティブサスペンションは、サスペンションにアクチュエータが組み込まれ、組み込んだアクチュエータでサスペンションを強制的に伸縮可能に構成されている。
このアクティブサスペンションによれば、アクチュエータでサスペンションを強制的に伸縮させて、路面からの入力により生じる車体の揺れや振動を抑えることが可能である。
【0008】
ここで、路面からの入力は車体全体に伝達されて車体全体に揺れや振動が生じる。車体全体は、重量物であるため揺れや振動による慣性力が大きい。
このため、車体全体の揺れや振動をアクティブサスペンションで十分に抑えることは難しい。
【0009】
ところで、車体構造の乗り心地は、車輪が路面の突起や段差を乗り越える際に車体構造に生じる突上げ方向の「上下ショック」に加えて、「ピッチング」、「バウンシング」または「ローリング」などにより生じる揺れや振動の影響を受ける。
特に、車輪が路面の突起や段差を乗り越える際に生じる「上下ショック」は、車体構造の乗り心地に大きな影響を与えることが知られている。
この「上下ショック」を抑えるためには、アクティブサスペンションで車体構造を下降させる必要がある。
【0010】
しかし、アクティブサスペンションは、通常、車体構造をサスペンションで下側から上方に向けて支えている。
このため、「上下ショック」などに対応させて車体構造を迅速に下降させることが難しい。
【0011】
本発明は、車両の乗り心地の向上を図ることができる車体構造を提供することを課題とする。
【課題を解決するための手段】
【0012】
請求項1に係る発明は、車輪を支持する懸架ユニットと、前記懸架ユニットを支持する主車体部と、前記主車体部に連結されるとともに前記主車体部から下方に向けて延出されたアクチュエータと、前記アクチュエータで吊り下げられるとともに前記主車体部から切り離された吊下フロアと、を備え、前記吊下フロアに前記主車体部から揺れ、振動が伝達することを前記アクチュエータで抑制可能としたことを特徴とする。
【0013】
請求項2は、前記アクチュエータは、前記吊下フロアを所定の吊下位置で保持可能な機能と、前記吊下フロアの保持状態を解除して前記吊下フロアの自重により伸張可能な機能と、前記吊下フロアの保持状態を解除して縮小可能な機能と、を備えたことを特徴とする。
【0014】
請求項3は、前記車輪の近傍に前記アクチュエータを備え、前記アクチュエータの保持状態、伸張状態、縮小状態を制御する制御部を備え、前記制御部は、前記車輪が路面の突起や段差路面を乗り越える際に、前記車輪の近傍に設けられた前記アクチュエータを解放状態に所定時間制御可能とし、前記解放状態のアクチュエータを前記吊下フロアの自重により伸張させることを特徴とする。
【発明の効果】
【0015】
請求項1に係る発明では、主車体部から吊下フロアを切り離し、切り離した吊下フロアをアクチュエータで下方に吊り下げるようにした。
主車体部から吊下フロアを切り離すことで吊下フロアの重量を軽減できる。吊下フロアの重量を軽減することで、吊下フロアの慣性力を小さくできる。
これにより、車両の走行中の「ピッチング」、「バウンシング」または「ローリング」などで主車体部に伝達された揺れや振動が吊下フロアに伝わることをアクチュエータで十分に抑制できる。
【0016】
ここで、「ピッチング」は、一例として、車両の走行中のブレーキ操作(制動操作)により生じることが考えられる。
また、「バウンシング」は、一例として、路面の凹凸部を走行する際に生じることが考えられる。
さらに、「ローリング」は、一例として、車両の走行中の旋回操作により生じることが考えられる。
【0017】
さらに、主車体部から吊下フロアを切り離し、切り離した吊下フロアをアクチュエータで下方に吊り下げるようにした。よって、車輪が路面の突起や段差を乗り越える際に、吊下フロアやシートの自重を利用して吊下フロアを効率よく下降させることができる。
吊下フロアを効率よく下降させることで、車輪が路面の突起や段差を乗り越える際に、主車体部に伝達された突上げ方向の「いわゆる、上下ショック」が吊下フロアに伝わることを抑制できる。
【0018】
このように、主車体部から吊下フロアを切り離し、切り離した吊下フロアをアクチュエータで吊り下げることで、吊下フロアに揺れや振動が伝わることを抑え、かつ、「上下ショック」が吊下フロアに伝わることを抑えることが可能になり、車両(車体構造)の乗り心地の向上を図ることができる。
【0019】
請求項2に係る発明では、アクチュエータに保持機能、伸張機能および縮小機能を備えた。よって、車両の静止時や直進走行中には、アクチュエータの保持機能で吊下フロアを所定の吊下位置に保持できる。
これにより、吊下フロアの高さを一定に保つとともに、水平に保つことができる。
【0020】
さらに、車両の走行中に「ピッチング」、「バウンシング」または「ローリング」などで揺れや振動が生じた際には、アクチュエータの伸張機能や縮小機能で吊下フロアを水平に保つことができる。
このように、アクチュエータに保持機能、伸張機能および縮小機能を備えることで、車両の静止状態や走行状態に応じて吊下フロアを水平に制御することが可能になり、車両(車体構造)の乗り心地の向上を図ることができる。
【0021】
また、伸張機能でアクチュエータを伸張させる際には、吊下フロアおよびシートの自重を利用して吊下フロアを下降(自然下降)させることができる。
これにより、アクチュエータを駆動させて伸張させる必要がないので、省エネルギー化(低燃費化)を図ることができる。
【0022】
請求項3に係る発明では、車輪が路面の突起や段差を乗り越える際に、車輪の近傍に設けられたアクチュエータを所定時間解放(フリーな)状態(すなわち、伸張状態)に保つようにした。
アクチュエータを所定時間解放状態に保つことで、アクチュエータによる主車体部および吊下フロア間の連結を所定時間切り離すことができる。
ここで、アクチュエータを所定時間解放状態に保つことで、吊下フロアやシートの自重を利用して吊下フロアを下降させることができる。
【0023】
また、例えば、車両の直進走行中において吊下フロアを水平状態に保つように吊下フロアに慣性力が作用している。
これにより、車輪が路面の突起や段差を乗り越える際に、主車体部に突上げ方向の「上下ショック」が伝達しても、吊下フロアを水平状態に保つことが可能になり車両(車体構造)の乗り心地の向上を図ることができる。
【図面の簡単な説明】
【0024】
【図1】本発明に係る車体構造(実施例1)を示す概略側面図である。
【図2】図1の車体構造を示す正面図である。
【図3】実施例1の車体構造が「ピッチング」状態の場合に吊下フロアを水平状態に保つ例を説明する図である。
【図4】実施例1の車体構造が「ローリング」状態の場合に吊下フロアを水平状態に保つ例を説明する図である。
【図5】実施例1の車体構造が「バウンシング」状態の場合に吊下フロアを水平状態に保つ例を説明する図である。
【図6】実施例1の車体構造左前車輪が路面の凸部に乗り上げた場合に吊下フロアを水平状態に保つ例を説明する図である。
【図7】本発明に係る車体構造(実施例2)を示す概略側面図である。
【発明を実施するための形態】
【0025】
本発明を実施するための最良の形態を添付図に基づいて以下に説明する。なお、「前(Fr)」、「後(Rr)」、「左(L)」、「右(R)」は運転者から見た方向にしたがう。
【実施例1】
【0026】
実施例1に係る車体構造10について説明する。
図1、図2に示すように、車体構造10は、主車体部11の下方に配置された左右の前車輪(車輪)13,14および左右の後車輪(車輪)15,16と、左右の前車輪13,14および左右の後車輪15,16を支持する懸架ユニット18と、懸架ユニット18を支持する主車体部11と、主車体部11に設けられたアクチュエータユニット21と、アクチュエータユニット21で吊り下げられた吊下フロア(車体フロア)23と、吊下フロア23を下降させた状態で支えるフロア支持手段25とを備えている。
【0027】
さらに、車体構造10は、路面27の突起や段差路面(凸部)27a(図6参照)を検知する検知手段31と、検知手段31からの検知信号に基づいてアクチュエータユニット21を制御する制御部33とを備えている。
【0028】
懸架ユニット18は、主車体部11の左前部11aに設けられて左前車輪13を支持する左前懸架手段35と、主車体部11の右前部11bに設けられて右前車輪14を支持する右前懸架手段36と、主車体部11の左後部11cに設けられて左後車輪15を支持する左後懸架手段37と、主車体部11の右後部11dに設けられて右後車輪16を支持する右後懸架手段38とを備えている。
【0029】
主車体部11は、左前懸架手段35を支持する左前部11aと、右前懸架手段36を支持する右前部11bと、左後懸架手段37を支持する左後部11cと、右後懸架手段38を支持する右後部11dと、アクチュエータユニット21を支えるアクチュエータ支持部(具体的には、左右の前支持部11e,11f、左右の後支持部11g,11h)とを備えている。
【0030】
アクチュエータユニット21は、左前アクチュエータ(アクチュエータ)41と、右前アクチュエータ(アクチュエータ)42と、左後アクチュエータ(アクチュエータ)43と、右後アクチュエータ(アクチュエータ)44とを備えている。
【0031】
アクチュエータ支持部の左前支持部11eは、左前アクチュエータ41の上端部(シリンダエンド)41aを主車体部11から支持する部位である。
アクチュエータ支持部の右前支持部11fは、右前アクチュエータ42の上端部(シリンダエンド)42aを主車体部11から支持する部位である。
アクチュエータ支持部の左後支持部11gは、左後アクチュエータ43の上端部(シリンダエンド)43aを主車体部11から支持する部位である。
アクチュエータ支持部の右後支持部11hは、右後アクチュエータ44の上端部(シリンダエンド)44aを主車体部11から支持する部位である。
【0032】
主車体部11から吊下フロア23が切り離されている。
吊下フロア23は、主車体部11から切り離された状態で単独に昇降可能な部材である。
この吊下フロア23は、路面27に対峙するように水平に設けられた床部46と、床部46の前端部に設けられた前仕切壁47と、床部46の後端部に設けられた後仕切壁48とを有する。
【0033】
床部46は、左前端部46aに左前アクチュエータ41の下端部(ロッドエンド)41bが連結され、右前端部46bに右前アクチュエータ42の下端部(ロッドエンド)42bが連結され、左後端部46cに左後アクチュエータ43の下端部(ロッドエンド)43bが連結され、右後端部46dに右後アクチュエータ44の下端部(ロッドエンド)44bが連結されている。
この床部46には、左右の前シート51および左右の後シート52が設けられている。
【0034】
すなわち、吊下フロア23は、主車体部11から切り離された状態で、左右の前アクチュエータ41,42および左右の後アクチュエータ43,44を介して吊下フロア23の左右の前支持部11e,11fおよび左右の後支持部11g,11hにそれぞれ吊り下げられている。
【0035】
主車体部11から吊下フロア23を切り離すことで吊下フロア23の重量を軽減できる。吊下フロア23の重量を軽減することで、吊下フロア23の慣性力を小さくできる。
さらに、全体の車両慣性を軽減できる。加えて、振動する車体全体を2つに分離することで主車体部11そのものの振動も軽減できる。
これにより、車両の走行中の「ピッチング」、「バウンシング」または「ローリング」などで主車体部11に伝達された揺れや振動が吊下フロア23に伝わることを左右の前アクチュエータ41,42および左右の後アクチュエータ43,44で十分に抑制できる。
【0036】
左前アクチュエータ41は、左前支持部11eに上端部41aが連結されるとともに、左前支持部11eから下方に向けて延出されている。
左前アクチュエータ41は、シリンダおよびピストンロッドを備えた通常の油圧シリンダである。
この左前アクチュエータ41は、左前車輪13の近傍に設けられ、かつ、左前懸架手段35に対して車幅方向内側(車幅方向中心側)に配置されるとともに、車両前後方向内側(車両後方側)に配置されている。
【0037】
左前アクチュエータ41に左前電磁弁(左前方向切替弁)61を介してポンプ62が連通されている。
左前電磁弁61は、制御部33からの切替信号に基づいて、左前アクチュエータ41を保持状態に保つ保持位置、左前アクチュエータ41を縮小状態に保つ縮小位置、左前アクチュエータ41を伸張状態に保つ伸張位置に切替可能なバルブである。
【0038】
具体的には、左前電磁弁61を保持位置に切り替えることで、左前アクチュエータ41とポンプ62との連通を遮断するとともに、左前アクチュエータ41とタンク63との連通を遮断する。
よって、左前アクチュエータ41内の作動オイルを左前アクチュエータ41内に保持して、左前アクチュエータ41(ピストンロッド)を静止状態(保持状態)に保つことができる。
すなわち、左前アクチュエータ41は、吊下フロア23を所定の吊下位置で保持可能な機能(保持機能)を備えている。
【0039】
また、左前電磁弁61を縮小位置に切り替えることで、左前アクチュエータ41のシリンダヘッド側にポンプ62を連通するとともに、シリンダキャップ側にタンク63を連通する。
よって、ポンプ62からシリンダヘッド側に作動オイルを供給して、左前アクチュエータ41のピストンロッドをシリンダ内に後退させて左前アクチュエータ41を縮小状態に保つことができる。
すなわち、左前アクチュエータ41は、吊下フロア23の保持状態を解除して縮小可能な機能を備えている。
【0040】
さらに、左前電磁弁61を伸張位置に切り替えることで、左前アクチュエータ41のシリンダキャップ側をシリンダヘッド側に連通する。
この状態で、左前アクチュエータ41の下端部41bに、吊下フロア23の自重が下向きに作用するとともに左右の前シート51および左右の後シート52の自重が下向きに作用している。
【0041】
よって、吊下フロア23の自重、左右の前シート51および左右の後シート52の自重で左前アクチュエータ41のロッドをシリンダから進出させて左前アクチュエータ41を伸張状態に保つことができる。
すなわち、左前アクチュエータ41は、吊下フロア23の保持状態を解除して吊下フロア23の自重、左右の前シート51および左右の後シート52の自重により伸張可能な機能を備えている。
【0042】
右前アクチュエータ42は、右前支持部11fに上端部42aが連結されるとともに、右前支持部11fから下方に向けて延出された油圧シリンダである。
この右前アクチュエータ42は、右前車輪14の近傍に設けられ、かつ、右前懸架手段36に対して車幅方向内側(車幅方向中心側)に配置されるとともに、車両前後方向内側(車両後方側)に配置されている。
【0043】
右前アクチュエータ42は、左前アクチュエータ41と同様に、右前電磁弁(右前方向切替弁)65を介してポンプ62やタンク63に連通されている。
右前電磁弁65は、左前電磁弁61と同じバルブである。
よって、右前アクチュエータ42は、左前アクチュエータ41と同様に、保持可能な機能、縮小可能な機能(縮小機能)、および伸張可能な機能(伸張機能)を備えている。
【0044】
左後アクチュエータ43は、左後支持部11gに上端部43aが連結されるとともに、左後支持部11gから下方に向けて延出された油圧シリンダである。
この左後アクチュエータ43は、左後車輪15の近傍に設けられ、かつ、左後懸架手段37に対して車幅方向内側(車幅方向中心側)に配置されるとともに、車両前後方向内側(車両前方側)に配置されている。
【0045】
左後アクチュエータ43は、左前アクチュエータ41と同様に、左後電磁弁(左後方向切替弁)66を介してポンプ62やタンク63に連通されている。
左後電磁弁66は、左前電磁弁61と同じバルブである。
よって、左後アクチュエータ43は、左前アクチュエータ41と同様に、保持可能な機能、縮小可能な機能、および伸張可能な機能を備えている。
【0046】
右後アクチュエータ44は、右後支持部11hに上端部44aが連結されるとともに、右後支持部11hから下方に向けて延出された油圧シリンダである。
この右後アクチュエータ44は、右後車輪16の近傍に設けられ、かつ、右後懸架手段38に対して車幅方向内側(車幅方向中心側)に配置されるとともに、車両前後方向内側(車両前方側)に配置されている。
【0047】
右後アクチュエータ44は、左前アクチュエータ41と同様に、右後電磁弁(右後方向切替弁)67を介してポンプ62やタンク63に連通されている。
右後電磁弁67は、左前電磁弁61と同じバルブである。
よって、右後アクチュエータ44は、左前アクチュエータ41と同様に、保持可能な機能、縮小可能な機能、および伸張可能な機能を備えている。
【0048】
このように、アクチュエータ41〜44に保持機能、伸張機能および縮小機能が備えられている。
よって、車両(車体構造10)の静止時や直進走行中には、アクチュエータ41〜44の保持機能で吊下フロア23を所定の吊下位置に保持できる。
これにより、吊下フロア23の高さを一定に保つとともに、水平に保つことができる。
【0049】
さらに、車体構造10の走行中に「ピッチング」、「バウンシング」または「ローリング」などで揺れや振動が生じた際には、アクチュエータ41〜44の伸張機能や縮小機能で吊下フロアを水平に保つことができる。
このように、アクチュエータ41〜44に保持機能、伸張機能および縮小機能を備えることで、車体構造10の静止状態や走行状態に応じて吊下フロア23を水平に制御することが可能になり、車両(車体構造10)の乗り心地の向上を図ることができる。
【0050】
また、伸張機能でアクチュエータ41〜44を伸張させる際には、吊下フロア23の自重や、左右の前シート51および左右の後シート52の自重を利用して吊下フロア23を下降(自然下降)させることができる。
これにより、アクチュエータ41〜44を駆動させて伸張させる必要がないので、省エネルギー化(低燃費化)を図ることができる。
【0051】
フロア支持手段25は、左前アクチュエータ41の近傍(主車体部11の左前部11a近傍)に備えた左前フロア支持部71と、右前アクチュエータ42の近傍(主車体部11の右前部11b近傍)に備えた右前フロア支持部72と、左後アクチュエータ43の近傍(主車体部11の左後部11c近傍)に備えた左後フロア支持部73と、右後アクチュエータ44の近傍(主車体部11の右後部11d近傍)に備えた右後フロア支持部74とを備えている。
【0052】
左前フロア支持部71は、スプリングやゴムなどの減衰支持部であり、吊下フロア23や左右の前シート51および左右の後シート52の自重で左前アクチュエータ41を伸張させたとき、吊下フロア23(前仕切壁47)の左前当接部47aが載置される部材である。
この左前フロア支持部71は、左前アクチュエータ41の伸張ストロークが最大長さに到達する前に、吊下フロア23の左前当接部47aが載置されるように形成されている。
左前フロア支持部71に左前当接部47aが載置された状態において、左前当接部47aの揺れや振動を左前フロア支持部71で減衰することができる。
【0053】
右前フロア支持部72、左後フロア支持部73および右後フロア支持部74は、左前フロア支持部71と同様の部材であり、詳しい説明を省略する。
すなわち、右前フロア支持部72は、右前アクチュエータ42の伸張ストロークが最大長さに到達する前に、吊下フロア23(前仕切壁47)の右前当接部47bが載置されるように形成されている。
右前フロア支持部72に右前当接部47bが載置された状態において、右前当接部47bの揺れや振動を右前フロア支持部72で減衰することができる。
【0054】
また、左後フロア支持部73は、左後アクチュエータ43の伸張ストロークが最大長さに到達する前に、吊下フロア23(後仕切壁48)の左後当接部48aが載置されるように形成されている。
左後フロア支持部73に左後当接部48aが載置された状態において、左後当接部48aの揺れや振動を左後フロア支持部73で減衰することができる。
【0055】
さらに、右後フロア支持部74は、右後アクチュエータ44の伸張ストロークが最大長さに到達する前に、吊下フロア23(後仕切壁48)の右後当接部48bが載置されるように形成されている。
右後フロア支持部74に右後当接部48bが載置された状態において、右後当接部48bの揺れや振動を右後フロア支持部74で減衰することができる。
【0056】
検知手段31は、路面27から左前懸架手段35に作用する「突上入力」Fなどを検知する左前G感知センサー83と、路面27から右前懸架手段36の「突上入力」Fなどを検知する右前G感知センサー84と、路面27から左後懸架手段37の「突上入力」Fなどを検知する左後G感知センサー85と、路面27から右後懸架手段38の「突上入力」Fなどを検知する右後G感知センサー86とを備えている。
【0057】
ここで、左右の前懸架手段35,36や左右の後懸架手段37,38に「突上入力」Fが作用した場合、例えば、車両の走行中に「いわゆる、上下ショック」や「バウンシング」が生じることが考えられる。
【0058】
左前G感知センサー83は、左前懸架手段35に設けられている。
この左前G感知センサー83は、左前懸架手段35に作用する路面27からの「突上入力」Fを検知し、検出した突上信号を制御部33に伝えるセンサーである。
さらに、左前G感知センサー83は、車両の走行中に「ピッチング」や「ローリング」が生じた際に、左前懸架手段35に作用する荷重を検知し、検出した荷重信号を制御部33に伝えるセンサーである。
【0059】
右前G感知センサー84は、右前懸架手段36に設けられている。
この右前G感知センサー84は、左前G感知センサー83と同様に、右前懸架手段36に作用する路面からの「突上入力」Fを検知し、検出した突上信号を制御部33に伝えるセンサーである。
さらに、右前G感知センサー84は、車両の走行中に「ピッチング」や「ローリング」が生じた際に、右前懸架手段36に作用する荷重を検知し、検出した荷重信号を制御部33に伝えるセンサーである。
【0060】
左後G感知センサー85は、左後懸架手段37に設けられている。
この左後G感知センサー85は、左後懸架手段37に作用する路面からの「突上入力」Fを検知し、検出した突上信号を制御部33に伝えるセンサーである。
さらに、左後G感知センサー85は、車両の走行中に「ピッチング」や「ローリング」が生じた際に、左後懸架手段37に作用する荷重を検知し、検出した荷重信号を制御部33に伝えるセンサーである。
【0061】
右後G感知センサー86は、右後懸架手段38に設けられている。
この右後G感知センサー86は、左前G感知センサー83と同様に、右後懸架手段38に作用する路面27からの「突上入力」Fを検知し、検出した突上信号を制御部33に伝えるセンサーである。
さらに、右後G感知センサー86は、車両の走行中に「ピッチング」や「ローリング」が生じた際に、右後懸架手段38に作用する荷重を検知し、検出した荷重信号を制御部33に伝えるセンサーである。
【0062】
制御部33は、左右の前G感知センサー83,84や左右の後G感知センサー85,86から伝えられた検知信号に基づいて車両が「ピッチング」、「バウンシング」または「ローリング」状態であるか、「上下ショック」状態であるかを判断する。
【0063】
制御部33において、車両が「ピッチング」、「バウンシング」または「ローリング」状態であると判断した場合、左右の前G感知センサー83,84や左右の後G感知センサー85,86から伝えられた検知信号に基づいて、吊下フロア23を水平に保つ切替信号を左右の前電磁弁61,65や左右の後電磁弁66,67に伝える。
左右の前電磁弁61,65や左右の後電磁弁66,67を切り替えることで、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を保持状態、伸張状態または縮小状態に制御して吊下フロア23の床部46を水平に保つことができる。
【0064】
一方、制御部33において、「上下ショック」状態であると判断した場合、左右の前G感知センサー83,84や左右の後G感知センサー85,86から伝えられた検知信号に基づいて、吊下フロア23を水平に保つ切替信号を左右の前電磁弁61,65や左右の後電磁弁66,67に伝える。
【0065】
左右の前電磁弁61,65や左右の後電磁弁66,67を切り替えることで、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を解放(フリーな)状態に所定時間制御可能である。
解放状態に所定時間制御することで、吊下フロア23の床部46を水平に保つことができる。
【0066】
すなわち、制御部33は、左右の前車輪13,14および左右の後車輪15,16のいずれかの車輪が路面27の凸部27a(図6参照)を乗り越える際に、凸部27aを乗り越える車輪の近傍に設けられたアクチュエータを解放状態に所定時間制御可能である。
さらに、前述したように、主車体部11から吊下フロア23が切り離され、切り離した吊下フロア23がアクチュエータ41〜44で下方に吊り下げられている。
【0067】
この状態で、アクチュエータを解放状態(フリーな状態)に所定時間制御することで、吊下フロア23を浮揚状態にする。
そして、吊下フロア23の自重や左右の前シート51および左右の後シート52の自重を利用して浮揚状態の吊下フロア23を効率よく下降(自然下降)させることができる。
すなわち、解放状態のアクチュエータを、吊下フロア23の自重や左右の前シート51および左右の後シート52の自重により伸張させることができる。
【0068】
吊下フロア23を効率よく下降させることで、車輪が路面27の凸部27a(図6参照)を乗り越える際に、主車体部11に伝達された突上げ方向の「いわゆる、上下ショック」が吊下フロア23に伝わることを抑制できる。
このように、主車体部11から吊下フロア23を切り離し、切り離した吊下フロア23をアクチュエータ41〜44で吊り下げることで、吊下フロア23に揺れや振動が伝わることを抑え、かつ、「上下ショック」が吊下フロア23に伝わることを抑えることが可能になり、車両(車体構造10)の乗り心地の向上を図ることができる。
【0069】
このように、制御部33で左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を制御することで、車両(車体構造10)の走行状態に対応させて吊下フロア23の姿勢を調整することができる。
【0070】
つぎに、車両が「ピッチング」状態の場合に吊下フロア23の床部46を水平状態に保つ例を図3に基づいて説明する。
図3に示すように、一例として、車両の走行中のブレーキ操作(制動操作)により車体に「ピッチング」が生じることが考えられる。
車両の走行中に車体に「ピッチング」が生じることで、車体が矢印Aの如く前傾したり、車体が矢印Bの如く後傾する。車体が「ピッチング」することで、左右の前懸架手段35,36や左右の後懸架手段37,38に荷重が作用する。
【0071】
左右の前懸架手段35,36や左右の後懸架手段37,38に作用した荷重を左右の前G感知センサー83,84や左右の後G感知センサー85,86で検知する。
左右の前G感知センサー83,84や左右の後G感知センサー85,86から制御部33に検知信号が伝えられる。制御部33は、伝えられた検知信号に基づいて車両が「ピッチング」状態であると判断する。
【0072】
「ピッチング」状態であると判断した後、制御部33から左右の前電磁弁61,65や左右の後電磁弁66,67に切替信号を伝える。
左右の前電磁弁61,65や左右の後電磁弁66,67が切り替わることにより、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を保持状態、伸張状態または縮小状態に制御することで吊下フロア23の床部46を水平に保つ。
吊下フロア23の床部46を水平に保つことで、車両(車体構造10)の乗り心地の向上を図ることができる。
【0073】
つぎに、車両が「ローリング」状態の場合に吊下フロア23の床部46を水平状態に保つ例を図4に基づいて説明する。
図4に示すように、一例として、車両の走行中の旋回操作により車体に「ローリング」が生じることが考えられる。
車両の走行中に車体に「ローリング」が生じることで、車体が矢印Cの如く車幅方向右側に傾斜したり、車体が矢印Dの如く車幅方向左側に傾斜する。車体が「ローリング」することで、左右の前懸架手段35,36や左右の後懸架手段37,38に荷重が作用する。
【0074】
左右の前懸架手段35,36や左右の後懸架手段37,38に作用した荷重を左右の前G感知センサー83,84や左右の後G感知センサー85,86で検知する。
左右の前G感知センサー83,84や左右の後G感知センサー85,86から制御部33(図3参照)に検知信号が伝えられる。制御部33は、伝えられた検知信号に基づいて車両が「ローリング」状態であると判断する。
【0075】
「ローリング」状態であると判断した後、制御部33から左右の前電磁弁61,65や左右の後電磁弁66,67(図3参照)に切替信号を伝える。
左右の前電磁弁61,65や左右の後電磁弁66,67が切り替わることにより、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を保持状態、伸張状態または縮小状態に制御することで吊下フロア23の床部46を水平に保つ。
吊下フロア23の床部46を水平に保つことで、車両(車体構造10)の乗り心地の向上を図ることができる。
【0076】
ついで、車両が「バウンシング」状態の場合に吊下フロア23の床部46を水平状態に保つ例を図5に基づいて説明する。
図5に示すように、車両が路面27の凹凸部27bを走行中に車体が「バウンシング」、すなわち、車体全体が矢印Eの如く上下方向にバウンドすることが考えられる。
凹凸部27bから左右の前車輪13,14や左右の後車輪15,16を経て左右の前懸架手段35,36や左右の後懸架手段37,38に「突上入力」F1が矢印の如く作用する。
【0077】
左右の前懸架手段35,36や左右の後懸架手段37,38に作用した「突上入力」F1を左右の前G感知センサー83,84や左右の後G感知センサー85,86で検知する。
左右の前G感知センサー83,84や左右の後G感知センサー85,86から制御部33に伝えられた検知信号に基づいて、制御部33において車両が「バウンシング」状態であると判断する。
【0078】
「バウンシング」状態であると判断した後、制御部33から左右の前電磁弁61,65や左右の後電磁弁66,67に切替信号を伝える。
左右の前電磁弁61,65や左右の後電磁弁66,67が切り替わることにより、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を保持状態、伸張状態または縮小状態に制御することで吊下フロア23の床部46を水平に保つ。
吊下フロア23の床部46を水平に保つことで、車両(車体構造10)の乗り心地の向上を図ることができる。
【0079】
つぎに、車体構造10の左前車輪13が路面27の凸部27aに乗り上げた場合に吊下フロア23の床部46を水平状態に保つ例を図6に基づいて説明する。
図6(a),(b)に示すように、車両の左前車輪13が路面27の凸部27aに乗り上げることにより、凸部27aから左前車輪13を経て左前懸架手段35に「突上入力」F2が矢印の如く作用する。
左前懸架手段35に「突上入力」F2が作用することで、主車体部11の左前部11aが矢印Fの如く上昇する。
【0080】
同時に、左前懸架手段35に作用した「突上入力」F2を左前G感知センサー83で検知し、検知した検知信号を制御部33に伝える。
左前G感知センサー83から伝えられた検知信号に基づいて、制御部33において車両が「上下ショック」状態であると判断する。
【0081】
「上下ショック」状態であると判断した後、制御部33から左前電磁弁61に切替信号を伝える。左前電磁弁61が解放位置に切り替わることにより、左前アクチュエータ41を解放状態(すなわち、伸張状態)に所定時間制御する。
左前アクチュエータ41を解放状態に所定時間制御することで、左前アクチュエータ41による主車体部11および吊下フロア23間の連結を所定時間切り離すことができる。
よって、吊下フロア23の自重、左右の前シート51および左右の後シート52の自重で左前アクチュエータ41を矢印Gの如く伸張する。
【0082】
左前アクチュエータ41が伸張することで、吊下フロア23(床部46)の左前端部46aを矢印Gの如く下降させることができる。
さらに、例えば、車両(車体構造10)の直進走行中において吊下フロア23を水平状態に保つように吊下フロア23に慣性力が作用している。
これにより、車体構造10が路面27の凸部27aを乗り越える際に、主車体部11に突上げ方向の「上下ショック」が伝達しても、吊下フロア23を水平状態に保つことが可能になり車体構造10の乗り心地の向上を図ることができる。
【0083】
左前アクチュエータ41を解放状態に所定時間制御した後、すなわち所定時間経過した後、制御部33で吊下フロア23の床部46が水平に保たれているか否かを判断する。
制御部33で吊下フロア23の床部46が水平に保たれていると判断した場合、制御部33から左右の前電磁弁61,65や左右の後電磁弁66,67に保持状態に切り替える切替信号を伝える。
よって、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を保持状態に制御して吊下フロア23の床部46を水平に保つことができる。
【0084】
一方、制御部33で吊下フロア23の床部46が水平に保たれていないと判断した場合、吊下フロア23の床部46を水平に保つことができる切替信号を、制御部33から左右の前電磁弁61,65や左右の後電磁弁66,67に伝える。
左右の前電磁弁61,65や左右の後電磁弁66,67を切り替えることで、吊下フロア23の床部46を水平に保つことができる。
【0085】
なお、図6(a),(b)では、車両の左前車輪13のみが路面27の凸部27aに乗り上げた例について説明したが、左右の前車輪13,14が路面27の凸部27aに乗り上げた場合も同様の効果が得られる。
すなわち、左右の前車輪13,14が路面27の凸部27aに乗り上げて、主車体部11に突上げ方向の「上下ショック」が伝達する。
この場合、左右の前アクチュエータ41,42を解放状態(フリーの状態)にすることで、「突上入力」を吊下フロア23から遮断するとともに、吊下フロア23を水平状態に保つことで乗り心地の向上を図ることができる。
【0086】
つぎに、実施例2を図7に基づいて説明する。なお、実施例2において実施例1と同一・類似部材については同じ符号を付して説明を省略する。
【実施例2】
【0087】
実施例2に係る車体構造90について説明する。
図7に示すように、車体構造90は、実施例1の車体構造10に路面監視システム92を備えたもので、その他の構成は実施例1の車体構造10と同様である。
【0088】
路面監視システム92は、車両の前方を監視する撮像カメラ93と、車両の前方を監視するレーダーセンサー94とを備え、車両前方の路面27の監視データを制御部33に伝えるシステムである。
【0089】
すなわち、撮像カメラ93は、路面27を撮像した画像データを制御部33に伝える装置である。
撮像カメラ93から伝えられた画像データを制御部33で画像処理し、路面27に凸部27aがあるか否かを判断する。
【0090】
レーダーセンサー94は、発信した電波を路面27で反射させ、路面27で反射した電波を受信し、このデータを制御部33に伝えるセンサーである。
レーダーセンサー94から伝えられたデータに基づいて制御部33で路面27に凸部27aがあるか否かを判断する。
【0091】
このように、路面監視システム92を備えることで路面監視システム92の監視データに基づいて、路面27に凸部27aがあるか否かを車輪が凸部27aに乗り上げる前に予測することができる。
よって、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を車輪が凸部27aに乗り上げる前に作動させることが可能になる。
これにより、各アクチュエータ41,42,43,44を路面27の凸部27aに合わせて高精度に制御可能になり、吊下フロア23の床部46を一層好適に水平に保ち、車両の乗り心地の向上をさらに図ることができる。
【0092】
なお、本発明に係る車体構造は、前述した実施例1,2に限定されるものではなく適宜変更、改良などが可能である。
例えば、前記実施例1,2では、左右の前アクチュエータ41,42や左右の後アクチュエータ43,44として油圧シリンダを用いた例について説明したが、これに限らないで、電気モータなどの他のアクチュエータを用いることが可能である。
【0093】
また、前記実施例1,2では、アクチュエータユニット21として左右の前車輪13,14および左右の後車輪15,16の近傍に左右の前アクチュエータ41,42や左右の後アクチュエータ43,44を4個設けた例について説明したが、これに限らないで、アクチュエータの個数やアクチュエータの配置箇所を任意に選択することも可能である。
【0094】
さらに、前記実施例1,2で示した車体構造10、主車体部11、左右の前車輪13,14、左右の後車輪15,16、吊下フロア23、制御部33、左前アクチュエータ41、右前アクチュエータ42、左後アクチュエータ43および右後アクチュエータ44などの形状や構成は例示したものに限定するものではなく適宜変更が可能である。
【産業上の利用可能性】
【0095】
本発明は、車両の走行状態に対応させて車体フロアの姿勢をアクチュエータで調整可能な車体構造を備えた自動車への適用に好適である。
【符号の説明】
【0096】
10…車体構造、11…主車体部、13,14…左右の前車輪(車輪)、15,16…左右の後車輪(車輪)、21…アクチュエータユニット、23…吊下フロア、27…路面、27a…突起や段差路面(凸部)、33…制御部、41…左前アクチュエータ(アクチュエータ)、42…右前アクチュエータ(アクチュエータ)、43…左後アクチュエータ(アクチュエータ)、44…右後アクチュエータ(アクチュエータ)。
【特許請求の範囲】
【請求項1】
車輪を支持する懸架ユニットと、
前記懸架ユニットを支持する主車体部と、
前記主車体部に連結されるとともに前記主車体部から下方に向けて延出されたアクチュエータと、
前記アクチュエータで吊り下げられるとともに前記主車体部から切り離された吊下フロアと、を備え、
前記吊下フロアに前記主車体部から揺れ、振動が伝達することを前記アクチュエータで抑制可能としたことを特徴とする車体構造。
【請求項2】
前記アクチュエータは、
前記吊下フロアを所定の吊下位置で保持可能な機能と、
前記吊下フロアの保持状態を解除して前記吊下フロアの自重により伸張可能な機能と、
前記吊下フロアの保持状態を解除して縮小可能な機能と、
を備えたことを特徴とする請求項1記載の車体構造。
【請求項3】
前記車輪の近傍に前記アクチュエータを備え、
前記アクチュエータの保持状態、伸張状態、縮小状態を制御する制御部を備え、
前記制御部は、
前記車輪が路面の突起や段差路面を乗り越える際に、前記車輪の近傍に設けられた前記アクチュエータを解放状態に所定時間制御可能とし、
前記解放状態のアクチュエータを前記吊下フロアの自重により伸張させることを特徴とする請求項2記載の車体構造。
【請求項1】
車輪を支持する懸架ユニットと、
前記懸架ユニットを支持する主車体部と、
前記主車体部に連結されるとともに前記主車体部から下方に向けて延出されたアクチュエータと、
前記アクチュエータで吊り下げられるとともに前記主車体部から切り離された吊下フロアと、を備え、
前記吊下フロアに前記主車体部から揺れ、振動が伝達することを前記アクチュエータで抑制可能としたことを特徴とする車体構造。
【請求項2】
前記アクチュエータは、
前記吊下フロアを所定の吊下位置で保持可能な機能と、
前記吊下フロアの保持状態を解除して前記吊下フロアの自重により伸張可能な機能と、
前記吊下フロアの保持状態を解除して縮小可能な機能と、
を備えたことを特徴とする請求項1記載の車体構造。
【請求項3】
前記車輪の近傍に前記アクチュエータを備え、
前記アクチュエータの保持状態、伸張状態、縮小状態を制御する制御部を備え、
前記制御部は、
前記車輪が路面の突起や段差路面を乗り越える際に、前記車輪の近傍に設けられた前記アクチュエータを解放状態に所定時間制御可能とし、
前記解放状態のアクチュエータを前記吊下フロアの自重により伸張させることを特徴とする請求項2記載の車体構造。
【図1】



【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−25209(P2012−25209A)
【公開日】平成24年2月9日(2012.2.9)
【国際特許分類】
【出願番号】特願2010−163181(P2010−163181)
【出願日】平成22年7月20日(2010.7.20)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成24年2月9日(2012.2.9)
【国際特許分類】
【出願日】平成22年7月20日(2010.7.20)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]