
車外への音発生装置
【課題】車両が危険な区間を走行中であるか否かに応じて、使用者による警告音の停止の可否を制御することができる車外への音発生装置を得る。
【解決手段】走行地区を危険地区と判定する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部1−A、B、C、Dとを備え、情報取得部1−A、B、C、Dで取得された情報と記憶装置2−Aの判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、判定部2によって車両が危険地区を走行していると判定されている場合は、スイッチ部4からの制御信号にかかわらず、音発生部6の出力を停止しない制御部3とを備えた車外への音発生装置。
【解決手段】走行地区を危険地区と判定する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部1−A、B、C、Dとを備え、情報取得部1−A、B、C、Dで取得された情報と記憶装置2−Aの判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、判定部2によって車両が危険地区を走行していると判定されている場合は、スイッチ部4からの制御信号にかかわらず、音発生部6の出力を停止しない制御部3とを備えた車外への音発生装置。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、電気自動車等のモータ駆動する車両に搭載され、自車を認知させるために車外に音を発生する車外への音発生装置に関するものである。
【背景技術】
【0002】
電気自動車やハイブリッド車のようにモータで動作する車両では、エンジンで動作する車両と比べて走行音が小さく、周辺の歩行者が通行を感知することが難しい。そのため、車両の接近による危険を周囲に知らせることを目的として、車外に擬似騒音などの警告音を発生させる動きが広まってきている。
【0003】
一方、標準状態では警告音を発生するが、周辺の安全性が確保されている場合の使用を前提として、一時発音停止スイッチの装備も認められている。自車両が、歩行者のいないエリアを走行している場合、運転者は、この一時発音停止スイッチを使用することで警告音(擬似騒音)の発生を止めることができる。
【0004】
しかしながら、運転者が警告音の発生及び停止を自由に制御できる場合、警告音が必要な状況であっても、警告音の発生を停止したままであると、肝心なときに警告音が発生しない恐れがある。
また、近年、車外の道路状況や時間帯、歩行者の有無等の様々な条件で警告音を自動的に発生させるシステムが提案されているが、使用者が、警告音の発生を停止させた場合、停止してから自動的に警告音が出力されるまでに不可避的にタイムラグが発生する。
【0005】
さらに、安全性が確保されていない状況で、使用者が、任意にシステムを制御して警告音を停止した場合、歩行者が、自車両の接近に気付かない走行時間が生じる恐れがある。これは、本来の警告音発生装置の目的を満足しておらず危険である。
【0006】
例えば、特許文献1には、車両(自車)の発進が検知されると、自車と他の車両との間の距離が基準距離以下であっても、警報の停止又は出力レベルの軽減を禁止する制限禁止手段を設けた車両警報装置が開示されている。
しかしながら、この装置では、使用者が、警報の発生及び停止を制御可能な場合を前提としておらず、また車両の発進時における動作に制限されている。
このため、車外に警告音を発生する必要があるエリアに自車が存在する場合において、使用者が警告音を停止する危険を回避するものではない。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−264525号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
この発明は、上記のような課題を解決するためになされたもので、車両が危険な区間を走行中であるか否かに応じて、使用者による警告音の停止の可否を制御することができる車外への音発生装置を得ることを目的とする。
【課題を解決するための手段】
【0009】
この発明に係る車外への音発生装置は、車両に搭載され、車外に音を出力する車外への音発生装置であって、車外への音を発生させる音発生部と、走行地区を危険地区と判定する車両の状況が記述された判定条件を記憶する記憶部と、車両の状況としてカーナビゲーション装置、センサ部、カメラ部により得られる情報、車速信号、バック信号、ライト情報、ウィンカー情報、ワイパー情報または路車間通信情報を取得する情報取得部と、情報取得部によって取得された車両の状況を示す情報と、記憶部から読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定する判定部と、音発生部の出力を制御するとともに、外部からの音の出力停止を指示する制御信号にかかわらず、判定部によって車両が危険地区を走行していると判定されている場合は、音発生部の出力を停止しない制御部とを備え、判定は、情報取得部によって取得された車両の状況を示す情報に基づいて行われるものである。
【発明の効果】
【0010】
この発明によれば、車両の状況としてカーナビゲーション装置、センサ部、カメラ部により得られる情報、車速信号、バック信号、ライト情報、ウィンカー情報、ワイパー情報または路車間通信情報を取得する情報取得部と、情報取得部によって取得された車両の状況を示す情報と、記憶部から読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定することができる。これにより、自車の走行を認識させるべき走行地区で確実に音を発生することが可能であり、当該地区での安全性を向上させることができるという効果がある。
【図面の簡単な説明】
【0011】
【図1】この発明の車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図2】実施の形態1の車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図3】記憶装置に記憶される判定テーブルの一例(例1)を示す図である。
【図4】記憶装置に記憶される判定テーブルの他の例(例2)を示す図である。
【図5】記憶装置に記憶される判定テーブルの他の例(例3)を示す図である。
【図6】記憶装置に記憶される判定テーブルの他の例(例4)を示す図である。
【図7】車両の走行に伴う安全地区と危険地区との変遷を示す図である。
【図8】図1,2の警告音オフ制御禁止装置の構成を示すブロック図である。
【図9】図1,2の警告音発生装置の構成を示すブロック図である。
【図10】図1,2の警告音発生装置の他の構成を示すブロック図である。
【図11】実施の形態1の車外への音発生装置による動作の流れを示すフローチャートである。
【図12】システム終了の割り込みルーチンを示すフローチャートである。
【図13】スイッチ操作に応じた割り込み処理の流れを示すフローチャートである。
【図14】スイッチ操作に応じた他の割り込み処理の流れを示すフローチャートである。
【図15】この発明の実施の形態2による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図16】実施の形態2における記憶装置に記憶される判定テーブルの一例(例1)を示す図である。
【図17】実施の形態2における記憶装置に記憶される判定テーブルの一例(例2)を示す図である。
【図18】実施の形態2における記憶装置に記憶される判定テーブルの一例(例3)を示す図である。
【図19】実施の形態2の車外への音発生装置による動作の流れを示すフローチャートである。
【図20】この発明の実施の形態3による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図21】実施の形態3における記憶装置に記憶される判定テーブルの一例(例1)を示す図である。
【図22】実施の形態3における記憶装置に記憶される判定テーブルの一例(例2)を示す図である。
【図23】実施の形態3における記憶装置に記憶される判定テーブルの一例(例3)を示す図である。
【図24】実施の形態3の車外への音発生装置による動作の流れを示すフローチャートである。
【図25】この発明の実施の形態4による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図26】実施の形態4における記憶装置に記憶される判定テーブルの一例(例1)を示す図である。
【図27】実施の形態4における記憶装置に記憶される判定テーブルの一例(例2)を示す図である。
【図28】実施の形態4における記憶装置に記憶される判定テーブルの一例(例3)を示す図である。
【図29】実施の形態4の車外への音発生装置による動作の流れを示すフローチャートである。
【図30】この発明の実施の形態5による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図31】実施の形態5における記憶装置に記憶される判定テーブルの一例(例1)を示す図である。
【図32】実施の形態5における記憶装置に記憶される判定テーブルの一例(例2)を示す図である。
【図33】実施の形態5における記憶装置に記憶される判定テーブルの一例(例3)を示す図である。
【図34】実施の形態5における記憶装置に記憶される判定テーブルの一例(例4)を示す図である。
【図35】実施の形態5の車外への音発生装置による動作の流れを示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、この発明をより詳細に説明するため、この発明を実施するための形態について、添付の図面に従って説明する。
実施の形態1.
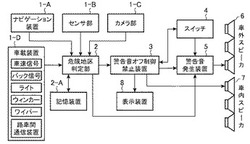
図1は、この発明の車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図1において、このシステムは、危険地区情報取得装置(情報取得部)1、危険地区判定部(判定部)2、記憶装置(記憶部)2−A、警告音オフ制御禁止装置(制御部)3、スイッチ4、警告音発生装置(制御部)5、車外スピーカ6、車内スピーカ(提示部)7、及び表示装置(提示部)8を備える。なお、以降の説明では、自車の走行を周囲の歩行者等に警告する(認知させる)車外への音を、警告音と記載する。警告音と呼んでも、必ずしもサイレンなどのように緊急事態を連想させるような音である必要はなく、車両が存在することを歩行者等に認識できるような音であれば、どのような音でもよい。警告音は、従来の内燃機関を動力源とするガソリン車やディーゼル車やバイクなどの車両の走行状態を想起させる連続音のような音が望ましいが、笛、ベル、太鼓などから出るような音でもよい。
危険地区情報取得装置1は、自車両が走行中の区間情報を取得する装置であり、ナビゲーション装置、センサ部、カメラ部及び車載装置のうちの少なくとも1つで構成される。これらの態様は、本実施の形態、実施の形態2〜5で後述する。
【0013】
危険地区判定部2は、危険地区情報取得装置1で取得された走行中の区間情報と、記憶装置2−Aに記憶された所定の判定条件とに基づいて、自車両が走行する道路区間が危険地区であるか否かを判定する構成部である。
警告音オフ制御禁止装置3は、危険地区判定部2によって自車の走行区間が危険地区であると判定されると、警告音オフ制御禁止信号をスイッチ4及び警告音発生装置5へ出力する装置である。
スイッチ4は、使用者が警告音をオンオフ制御するためのスイッチ(一時発音停止スイッチ)である。つまり、当該スイッチ4の操作が、外部から警告音(車外への音)の出力停止を指示する所定操作に相当する。なお、スイッチ4は、警告音オフ制御禁止信号を受けると、使用者が任意に警告音を停止できないように出力信号を制御する。
【0014】
音発生部である警告音発生装置5は、警告音の発生を制御する装置であって、車外スピーカ6を介して警告音を出力する。なお、この警告音とは、自車の接近による危険を周囲に知らせることを目的として車外に出力する擬似騒音である。また、警告音発生装置5は、警告音オフ制御禁止装置3から警告音オフ制御禁止信号を受けると、スイッチ4からの制御信号に拘わらず警告音のオフ制御を禁止する。
【0015】
さらに、警告音発生装置5に警告音オフ制御禁止信号が入力されるか、若しくは自車の走行区間が危険地区であると判定されると、警告音オフ制御禁止装置3から、警告音オフ制御禁止告知信号が、車内スピーカ7及び表示装置8に出力される。これにより、車内スピーカ7又は表示装置8を介して、使用者に対して警告音のオフ制御が禁止されている旨や当該禁止の理由が通知される。
【0016】
図2は、実施の形態1の車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図2に示すシステムは、図1の危険地区情報取得装置1として、ナビゲーション装置1−Aを用いている。
ナビゲーション装置1−Aは、地図情報データベースやGPS受信機、走行道路の情報を受信する通信部を備え、現在時刻情報や現在位置情報、走行道路情報(道幅、一般・高速道路等の道路の種類、制限速度、交差点、カーブ等)、事故多発地区情報、周辺施設情報などを取得して、危険地区判定部2に通知する。
なお、危険地区判定部2が、ナビゲーション装置1−Aによって取得される上記情報の内容を常に監視し、内容に変化があると、当該情報をナビゲーション装置1−Aから取得するようにしてもよい。
【0017】
また、ナビゲーション装置1−Aが取得する情報の内容を常に監視するのではなく、一定時間ごと、若しくは一定距離を自車が走行するごとに、危険地区判定部2が、ナビゲーション装置1−Aから上記情報を取得するようにしても構わない。この一定時間及び走行距離は、車両の内又は外の少なくとも一方の環境変化に応じて動的に変化させてもよい。この環境変化とは、時間帯、車速度、天候、走行区間の周辺施設等の変化があげられる。例えば、時間帯が8時から20時までの間は一定時間及び走行距離を短くすることにより情報取得の回数を多くし、時間帯が20時から8時までの間には一定時間及び走行距離を長くすることによって情報取得の回数を少なくしても良い。また、一定時間及び走行距離を設定することができるスイッチ等の機構を設け、ユーザの操作によって変化させても良い。このように動的に情報を取得するタイミングを変化させることで、効率の良い処理を行うことができる。
【0018】
低速走行時のみに警告音を発生させる場合、危険地区判定部2が、ナビゲーション装置1−Aから車速情報のみを常に収集して、所定の低車速範囲内では、上記危険地区判定に用いる情報のうち、車速情報の他の情報も取得し、上記低車速範囲外(高速走行時など)においては、車速情報以外を取得しないようにしてもよい。また、常に収集する情報は、自車の走行速度を把握できる情報であれば、車速情報以外であってもよい。
【0019】
危険地区判定部2は、ナビゲーション装置1−Aから取得した上記情報と記憶装置2−Aに記憶された所定の判定条件とを用いて、自車が走行中の区間の危険の度合いを調べ、使用者が任意に警告音をオフすると危険な危険地区か否かを判定する。
危険地区と判定した場合、危険地区判定部2は、走行区間が危険地区であることを警告音オフ制御禁止装置3へ通知する。
【0020】
図3は、記憶装置2−Aに記憶される判定テーブルの一例(例1)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルを、危険地区判定部2の判定結果とともに示している。危険地区判定部2は、ナビゲーション装置1−Aから取得した上記情報に基づいて、図3に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで危険地区を判定する。図3の例では、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定3の「交差点を走行中か?」の条件に合致した場合を示している。このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0021】
図4は、記憶装置2−Aに記憶される判定テーブルの他の例(例2)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、自車の走行時間に関する条件を追加したものを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、ナビゲーション装置1−Aから取得した上記情報に基づいて、図4に示す判定テーブルの条件内容が追加条件とともに自車の走行区間に対して成り立つか否かで危険地区を判定する。
【0022】
図4の例では、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定2の「周辺に小学校があるか?」の条件に合致し、かつ追加条件の「登下校時間中」にも合致した場合を示している。このように判定テーブルのいずれかの条件及び追加条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
なお、判定2の「周辺に小学校があるか?」の条件に合致しても、自車の走行時間が、追加条件の「登下校時間中」に合致しない場合は危険地区と判定しない。
【0023】
図5は、記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、条件内容に対応した危険の度合いを示す点数(危険度)を追加したものを、危険地区判定部2の判定結果とともに示している。危険度は、例えば危険性が大きい場合を10、危険性が小さい場合を1とし、その間にレベル2〜9を割り付ける。
【0024】
危険地区判定部2は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間に合致する条件内容に対応付けられた危険度が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
【0025】
図5の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定3の「交差点を走行中か?」の条件と、判定4の「右左折を行うか?」の条件とに合致している。この場合、判定3の条件内容に対応する危険度“4”と判定4の条件内容に対応する危険度“5”との和である“9”が、上記閾値“8”以上であるので、「危険地区」であると判定されている。
【0026】
図6は、記憶装置2−Aに記憶される判定テーブルの他の例(例4)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、自車の走行時間帯に関する追加条件と、条件内容に対応した危険度を、危険地区判定部2の判定結果とともに示している。
図5に示した判定テーブルでは、例えば「周辺に小学校があるか?」という条件内容に危険度“5”を付与していたが、登下校時間外の人通りが少なくなっている時間帯では、当該危険度は過剰である。
そこで、図6に示すように、「周辺に小学校があるか?」という条件内容においても、追加条件として、時間帯が「登下校時間外」であれば、危険度を“3”とし、「登下校時間中」であれば、人通りの増加が予想されるので、危険度を最高の“10”とする。
【0027】
なお、図6の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定2の「周辺に小学校があるか?」の条件及びその追加条件「登下校時間中」に合致するとともに、判定4の「交差点を走行中か?」の条件に合致している。この場合には、判定2の条件及び追加条件に対応する危険度“10”と判定4の条件に対応する危険度“5”との和である“15”が閾値“8”以上であるので、「危険地区」であると判定されている。
【0028】
また、自車の走行区間を危険地区と判定する条件内容には、以下の例が挙げられる。
先ず、走行道路情報から特定された自車の走行道路の道幅が狭い場合(所定の道幅以下)や、自車が交差点又はカーブを走行する場合、右左折を行う場合には、自車の走行区間を危険地区と判定してもよい。
また、高速道路では危険地区を走行中でないと判定し、サービスエリアでは危険地区を走行中であると判定してもよい。
さらに、自車の走行道路の制限速度が低い場合は、住宅街等の歩行者が多い地区である可能性が高いので、制限速度が任意の閾値以下であれば、自車が危険地区を走行中であると判定してもよい。
【0029】
自車が走行中の道路が事故多発地区である場合や、周辺に小学校や商店街などの施設が存在する場合には、子供の飛び出しや周囲に歩行者が多い等の危険性が高いため、危険地区を走行中であると判定してもよい。
【0030】
現在時刻情報を用いる場合、警告音停止状態による走行が危険と判断される時間帯は、自車が危険地区を走行していると判定してもよい。
例えば、周囲の騒音が大きくなる時間帯は、車両の走行音が聞こえにくくなるため、危険地区を走行中と判定する。また、周囲が暗くなる時間帯では、運転手の視野角が狭まるため、危険地区を走行中と判定してもよい。この場合、ライトの点灯があれば、視覚的に周囲が車両に気付きやすいため、危険地区を走行中でないと判定してもよい。
【0031】
また、1つの条件だけで危険地区を判定するのではなく、周辺施設情報と現在時刻情報とを組み合わせて、自車が走行中の区間は、危険地区であるか否かを判定してもよい。
例えば、商店街が周辺に存在しても、店舗が閉店すると人通りが少なくなるため、現在時刻情報と組み合わせて、開店時間中は危険地区と判定し、閉店時間以降は危険地区ではないと判定してもよい。
【0032】
さらに、安全地区から危険地区へと判定される条件と、危険地区から安全地区へと判定される条件が同じ場合、危険地区と安全地区の境界を走行中に、不必要に判定結果が頻繁に変わる可能性がある。
これについては、危険地区から安全地区へと判定を更新する場合には、一度の判定結果で危険地区と判定するのではなく、複数回にわたって連続して危険地区と判定されたときに、安全地区から危険地区に更新するようにしてもよい。
【0033】
図7は、車両の走行に伴う安全地区と危険地区との変遷を示す図であって、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせた場合を示している。上述した危険地区と安全地区の境界を走行中に判定結果が頻繁に変わる不具合を解消するため、図7に示すように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせ、境界領域では、所定のルールで判定を行う。
【0034】
図7の例では、上記所定のルールとして、車両の危険度が、危険地区の開始閾値を一度超えると、安全地区の開始閾値以下になるまで、危険地区の判定が継続され、安全地区を走行する車両の危険度が安全地区の開始閾値を超えても安全地区と判定する。これにより、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値との差に相当する危険度領域で判定結果が頻繁に変わることを防止できる。
【0035】
図8は、図1,2の警告音オフ制御禁止装置の構成を示すブロック図である。図8に示すように、警告音オフ制御禁止装置3は、警告音オフ制御禁止信号生成部3a、告知信号生成部3b、表示信号処理部3c及び音声信号処理部3dを備える。
警告音オフ制御禁止信号生成部3aは、危険地区判定部2よって走行区間が危険地区と判定されると、警告音のオフ制御を禁止する信号を生成して、スイッチ4又は警告音発生装置5に通知する構成部である。
【0036】
告知信号生成部3bは、常に警告音オフ制御の状態を監視しており、新たな危険地区の判定結果によって警告音オフ制御の状態に変化があると、警告音オフ制御禁止告知信号を生成し、表示信号処理部3c及び音声信号処理部3dに通知する構成部である。
警告音オフ制御禁止告知信号とは、例えば、警告音オフ制御禁止の開始又は停止、危険地区の開始又は停止、スイッチ4の利用不可の開始又は停止といった警告音オフ制御の状態をユーザに告知するための信号である。
【0037】
表示信号処理部3c及び音声信号処理部3dは、告知信号生成部3bから通知された警告音オフ制御禁止告知信号を、車内スピーカ7又は表示装置8で出力可能な信号に変換して、車内スピーカ7又は表示装置8にそれぞれ出力する構成部である。
【0038】
なお、告知信号生成部3bは、警告音オフ制御禁止中にスイッチ4が押下された場合であっても、警告音オフ制御禁止中である、危険地区を走行中である、スイッチが利用不可であるといった旨の警告音オフ制御禁止告知信号を生成する。この場合においても、表示信号処理部3c及び音声信号処理部3dは、告知信号生成部3bから通知された警告音オフ制御禁止告知信号を、車内スピーカ7又は表示装置8で出力可能な信号に変換して出力する。
【0039】
スイッチ4は、ユーザが任意に操作することで、少なくとも警告音をオフ制御するスイッチである。なお、スイッチ4としては、押下等の操作によって、警告音のオフ制御のみを行うものでもよいし、警告音のオン制御とオフ制御の双方を行うものであってもよい。
警告音オフ制御禁止装置3よってスイッチ4が警告音オフ制御禁止信号を受け取った場合には、ユーザが、スイッチ4を用いて警告音のオフ操作を行っても、警告音をオフ制御することができないようにする。例えば、オン状態でロックをかけることで、オフ操作が不可能な機構にする。
また、スイッチ4にLED(Light Emitting Diode)等の表示機器を取り付けて、警告音オフ制御禁止かオフ制御可能かの状態を直接表示させることで、ユーザが、わざわざ車内スピーカ7や表示装置8の確認をすることなく、スイッチ4の操作と同時に警告音オフ制御状態を確認できるようにする。
【0040】
図9は、図1,2の警告音発生装置の構成を示すブロック図である。図9において、警告音発生装置5は、警告音発生システムを構成する装置であり、警告音停止制御部5a、警告音発生判定部5b、警告音生成部5c及びスピーカ出力処理部5dを備える。
警告音停止制御部5aは、スイッチ4が押下された場合に、スイッチ4がオン操作されたのか、オフ操作されたのかを判定し、警告音オン信号もしくは警告音オフ信号を警告音発生判定部5bに通知する構成部である。
【0041】
警告音発生判定部5bは、警告音停止制御部5aから警告音オン信号を得ると、警告音生成部5cに対して警告音を生成する指示を出力し、警告音オフ信号を得た場合は警告音生成部5cに対して警告音の生成を停止するように指示をする構成部である。
なお、警告音発生判定部5bは、警告音オフ制御禁止装置3から、警告音オフ制御禁止信号が通知された場合は、スイッチ4の操作に応じた警告音オフ信号の有無に拘わらず、警告音の発生を停止しないと判定する。つまり、警告音オフ制御禁止装置3から通知される警告音オフ制御禁止信号の方が、スイッチ4の操作信号(警告音オフ制御信号)よりも警告音発生の判定の優先度が高い。
【0042】
警告音生成部5cは、警告音データを生成する構成部であって、警告音発生判定部5bから警告音の発生を指示されると、警告音データをスピーカ出力処理部5dに出力し、警告音発生判定部5bから警告音の停止が指示されると、警告音データの生成を停止してスピーカ出力処理部5dに何も出力しない。スピーカ出力処理部5dでは、警告音生成部5cから受け取った警告音データを車外スピーカ6で適切に出力できるように、チャンネル数や音量の増幅などの音響処理を行う構成部である。
【0043】
図10は、図1,2の警告音発生装置の他の構成を示すブロック図である。図10に示す警告音発生装置5は、図9で示した構成に対して、出力ゲイン値判定部5eを追加している。出力ゲイン値判定部5eは、危険地区判定部2で調べた危険度に応じて、出力する警告音のゲイン値を設定する構成部である。スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定されたゲイン値を用いて、出力する警告音の音量調整を行う。
【0044】
車外スピーカ6は、車外に取り付けられた1つ又は複数のスピーカであり、警告音発生に用いる。車内スピーカ7は、車内に備え付けられた1つ又は複数のスピーカである。
表示装置8は、車内に備え付けられたディスプレイ等の表示機器であり、カーナビゲーションやLED、インストルパネルの表示機器を含む。
車内スピーカ7又は表示装置8は、警告音オフ制御禁止装置3から警告音オフ制御禁止告知信号を受け取り、スイッチ4で警告音のオフ操作が実行されない旨又は警告音を停止できない旨をユーザに伝える。また、危険地区を走行中にユーザが誤ってスイッチ4を警告音オフに押下した場合は、スイッチ4でオフ操作が実行されない旨又は警告音を停止できない旨をユーザに伝える。なお、ユーザへの上記通知は、車内スピーカ7又は表示装置8のうちの少なくとも一方で行われる。
【0045】
次に動作について説明する。
図11は、実施の形態1の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、ナビゲーション装置1−Aが、主電源であるバッテリから電力供給されて起動する。続いて、ナビゲーション装置1−Aは、GPS受信機によって現在時刻情報を取得し(ステップST1−1a)、現在位置情報を取得する(ステップST1−1b)。また、自車の走行に伴い、ナビゲーション装置1−Aは、現在位置情報に基づいて、地図情報データベースから、走行道路情報、事故多発地区情報、周辺施設情報を取得する(ステップST1−1c、ステップST1−1d、ステップST1−1e)。これらの情報は、ナビゲーション装置1−Aから危険地区判定部2へ出力される。
【0046】
危険地区判定部2は、ナビゲーション装置1−Aから入力した自車の走行区間情報と、記憶装置2−Aから読み出した所定の判定条件とに基づいて、自車両が走行する道路区間の危険度を調べ、出力ゲイン値判定部5eへ出力する。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST1−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
【0047】
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
【0048】
また、危険地区判定部2は、ナビゲーション装置1−Aで取得された各情報の危険の度合いを点数にして、各情報の点数もしくは複数の情報の点数の総和に応じて危険度を決定してもよい。例えば、現在時刻情報が「登下校時間」等の人通りの多い時間帯であるか否かに応じて危険の度合いを示す点数を付与し、現在位置情報が「小学校」等の多数の人が収容される施設の周辺に位置しているか否かで危険の度合いを示す点数を付与し、走行道路情報が上記のような施設に面した道路であるか否かで危険の度合いを示す点数を付与し、走行地区で事故が多発していることを示す事故多発地区情報に危険の度合いを示す点数を付与し、周辺施設情報で多数の人が収容される施設があるか否かで危険の度合いを示す点数を付与する。各情報の点数をそのまま危険度としてもよいし、複数の情報の点数の総和を危険度としてもよい。
【0049】
上述の説明では、警告音発生装置5が、出力ゲイン値判定部5eを備える場合を示したが、図9に示すように、出力ゲイン値判定部5eを有さない構成の場合には、警告音の出力音量の変更処理(ステップST1−2)は省略される。
【0050】
次に、危険地区判定部2は、ナビゲーション装置1−Aから取得した自車の走行区間に関する情報(現在時刻情報、現在位置情報、走行道路情報、事故多発地区情報、周辺施設情報)、及び、この走行区間情報と記憶装置2−Aから読み出した所定の判定条件とを参照して決定した危険度を示す情報に基づいて、自車が走行中の区間が危険地区であるか否かを判定する(ステップST1−3)。ここで、危険地区であると判定すると(ステップST1−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST1−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
【0051】
警告音オフ制御禁止装置3が危険地区判定部2から危険地区である旨の判定結果を入力した時点で、警告音オフ制御禁止装置3内の警告音オフ制御禁止信号生成部3aが、既に警告音オフ制御禁止信号を生成していれば、警告音のオフ制御が禁止中であり(ステップST1−4;禁止中)、ステップST1−1aの処理に戻る。
【0052】
また、危険地区である旨の判定結果を入力した時点で、警告音オフ制御禁止信号を生成しておらず、警告音のオフ制御が可能な状態であれば(ステップST1−4;制御可)、警告音オフ制御禁止信号生成部3aは、警告音オフ制御禁止信号を生成して、スイッチ4又は警告音発生装置5へ出力する。スイッチ4又は警告音発生装置5は、警告音オフ制御禁止信号を入力すると、スイッチ4の操作(押下)による警告音のオフ制御の禁止を開始する(ステップST1−5)。
【0053】
告知信号生成部3bは、危険地区判定部2から危険地区である旨の判定結果を入力してから、警告音のオフ制御の状態の変化(オフ制御の禁止へ変化)を認識すると、警告音オフ制御告知信号を生成して、表示信号処理部3c及び音声信号処理部3dへ出力する。
なお、告知信号生成部3bは、例えば、スイッチ4が警告音オフ制御禁止信号を受けているか否かに基づいて、警告音のオフ制御の状態の変化を認識する。
【0054】
表示信号処理部3c及び音声信号処理部3dは、告知信号生成部3bから入力した警告音オフ制御禁止告知信号を、表示装置8及び車内スピーカ7で出力可能な信号に変換して表示装置8及び車内スピーカ7にそれぞれ出力する。これにより、車内スピーカ7及び表示装置8から、警告音のオフ制御の禁止が開始された旨が、ユーザに通知される(ステップST1−6)。
【0055】
このとき、警告音生成部5cは、警告音発生判定部5bから警告音の生成を指示される以前に、スイッチ4が押下されて自身が警告音データを生成していなかった場合(ステップST1−7;YES)、直ちに警告音データを生成し、スピーカ出力処理部5dへ出力する。これにより、スピーカ出力処理部5dは、車外スピーカ6から、警告音を発生させる(ステップST1−8)。この後、ステップST1−1aの処理へ戻る。
【0056】
一方、ステップST1−3で危険地区でない(安全地区である)と判定され、警告音オフ制御禁止信号生成部3aが、危険地区判定部2から危険地区でない旨の判定結果を入力した時点で、警告音オフ制御禁止信号を生成しておらず、警告音のオフ制御が可能な状態であれば(ステップST1−9;制御可)、ステップST1−1aの処理に戻る。
【0057】
また、告知信号生成部3bは、危険地区判定部2から危険地区でない(安全地区である)旨の判定結果を入力してから、警告音のオフ制御が禁止中であることを認識すると(ステップST1−9;禁止中)、警告音のオフ制御の禁止の終了を示す警告音オフ制御告知信号を生成して、表示信号処理部3c及び音声信号処理部3dへ出力する。
【0058】
表示信号処理部3c及び音声信号処理部3dでは、告知信号生成部3bから通知された警告音オフ制御禁止告知信号を、車内スピーカ7又は表示装置8で出力可能な信号に変換して、車内スピーカ7又は表示装置8にそれぞれ出力する。これにより、車内スピーカ7又は表示装置8から、警告音のオフ制御の禁止が終了した旨が、ユーザに通知される(ステップST1−10)。
なお、警告音のオフ制御の禁止の開始及び停止時のみ、ユーザへ通知するのではなく、警告音のオフ制御の禁止中は、常に警告音のオフ制御が禁止されている等の旨を車内スピーカ7又は表示装置8から、ユーザに通知し続けてもよい。
【0059】
警告音オフ制御禁止信号生成部3aは、危険地区判定部2から危険地区でない旨の判定結果を入力すると、スイッチ4又は警告音発生装置5への警告音オフ制御禁止信号の出力を停止する。スイッチ4又は警告音発生装置5は、警告音オフ制御禁止信号生成部3aによる警告音オフ制御禁止信号の出力が停止されると、警告音のオフ制御の禁止を終了する(ステップST1−11)。この後、ステップST1−1aの処理に戻る。
【0060】
図12は、システム終了の割り込みルーチンを示すフローチャートである。実施の形態1の車外への音発生装置が、上述した図11の処理を実行している間、キースイッチの状態で処理が継続又は終了される(ステップST1a−1)。車両のキースイッチがオンであれば(ステップST1a−1;ON)、車外への音発生装置は、図11の処理を継続する。ユーザによって、車両のキースイッチがオフされると(ステップST1a−1;YES)、図11の処理の途中で割り込みが発生し、システムが終了する。
【0061】
図13は、スイッチ操作に応じた割り込み処理の流れを示すフローチャートであり、スイッチ4によって警告音の発生をオフ制御する操作のみ行える場合における割り込み処理を示している。
先ず、告知信号生成部3bは、スイッチ4の押下による操作信号(警告音オフ制御信号)を入力した時点で、当該スイッチ4に警告音オフ制御禁止信号が出力されていれば(ステップST1b−1;禁止中)、警告音のオフ制御が禁止中であることを示す警告音オフ制御告知信号を生成して、表示信号処理部3c及び音声信号処理部3dへ出力する。
これにより、車内スピーカ7及び表示装置8は、音声信号処理部3d及び表示信号処理部3cの制御によって警告音のオフ制御が禁止中である旨をユーザに通知し(ステップST1b−2)、割り込みが終了する。
なお、危険地区判定部2が、スイッチ4で警告音のオフ制御をしてはいけない理由として、危険地区と判定した結果の条件(自車の状況に合致した判定項目)を、警告音オフ制御禁止装置3を介して車内スピーカ7又は表示装置8を介してユーザに提示するようにしてもよい。
【0062】
一方、警告音発生装置5内の警告音停止制御部5aは、スイッチ4の押下による操作信号を入力すると、警告音の発生停止を指示する警告音オフ信号を、警告音発生判定部5bへ出力する。警告音発生判定部5bは、警告音停止制御部5aから警告音オフ信号を入力した時点で、警告音オフ制御禁止装置3から警告音オフ制御禁止信号を受信していなければ(ステップST1b−1;制御可)、警告音生成部5cに対し警告音の生成を停止するように指示をする。警告音生成部5cが、警告音発生判定部5bからの指示に従って警告音データの生成を停止することで、警告音の出力が停止され(ステップST1b−3)、割り込みが終了する。
【0063】
図14は、スイッチ操作に応じた他の割り込み処理の流れを示すフローチャートであって、スイッチ4によって警告音の発生をオフ制御する操作とオン制御する操作の双方が行える場合における割り込み処理を示している。
先ず、警告音停止制御部5aが、スイッチ4の操作内容から、オフ制御されたか、オン制御されたかを判定する(ステップST1c−1)。この判定結果は、警告音停止制御部5aから警告音発生判定部5bへ出力される。
【0064】
一方、告知信号生成部3bは、スイッチ4で警告音のオフ制御の操作がなされた時点で(ステップST1c−1;OFF)、スイッチ4が警告音オフ制御禁止装置3から警告音オフ制御禁止信号を入力しており、警告音のオフ制御が禁止中であることを認識すると(ステップST1c−2;禁止中)、警告音のオフ制御の禁止中を示す警告音オフ制御告知信号を生成して表示信号処理部3c及び音声信号処理部3dへ出力する。
【0065】
表示信号処理部3c及び音声信号処理部3dでは、告知信号生成部3bから通知された警告音オフ制御禁止告知信号を、車内スピーカ7又は表示装置8で出力可能な信号に変換して、車内スピーカ7又は表示装置8にそれぞれ出力する。これにより、車内スピーカ7又は表示装置8から、警告音のオフ制御の禁止中である旨がユーザに通知され(ステップST1c−3)、割り込みが終了する。
なお、危険地区判定部2が、スイッチ4で警告音のオフ制御の操作をしてはいけない理由として、危険地区と判定した結果の条件(自車の状況に合致した判定項目)を、警告音オフ制御禁止装置3を介して車内スピーカ7又は表示装置8を介してユーザに提示するようにしてもよい。
【0066】
警告音発生判定部5bは、スイッチ4で警告音のオフ制御の操作がなされた判定結果を入力した時点で(ステップST1c−1;OFF)、警告音オフ制御禁止装置3から警告音オフ制御禁止信号を受信していなければ、警告音のオフ制御が可能であると判定し(ステップST1b−1;制御可)、警告音生成部5cに対して警告音の生成を停止するように指示をする。警告音生成部5cが、警告音発生判定部5bからの指示に従って、警告音データの生成を停止することで、警告音の出力が停止され(ステップST1c−4)、割り込みが終了する。
【0067】
また、警告音発生判定部5bは、警告音停止制御部5aからスイッチ4で警告音のオン制御の操作がなされた判定結果を入力すると(ステップST1c−1;ON)、警告音生成部5cに対して警告音を生成するように指示をする。警告音生成部5cが、警告音発生判定部5bからの指示に従って警告音データを生成しスピーカ出力処理部5dへ出力することで、警告音が出力され(ステップST1c−5)、割り込みが終了する。
【0068】
以上のように、この実施の形態1によれば、走行地区を危険地区と判定する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部であるナビゲーション装置1−Aとを備え、ナビゲーション装置1−Aで取得された時間帯、道路幅、制限速度、事故多発地区や道路の種別情報、周辺の施設情報と、記憶装置2−Aから読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、外部から警告音の出力停止を指示するスイッチ4の操作がなされても、車両が危険地区を走行していると判定されていると、警告音の出力を停止しない。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、ナビゲーション装置1−Aとしては、車載機器として既存のものを利用することが可能である。
【0069】
実施の形態2.
図15は、この発明の実施の形態2による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図15において、実施の形態2における車外への音発生装置は、上記実施の形態1で説明した図2の構成におけるナビゲーション装置1−Aの代わりに、センサ部1−Bを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
【0070】
センサ部1−Bは、超音波センサやミリ波レーダ等のセンサを有して構成されており、当該センサを、車体の前方、側面、及び後方のいずれかあるいは全部に1つもしくは複数取り付けている。また、センサには、上述のようなアクティブセンサに加え、車両周辺を撮像した画像を画像解析して障害物の種類(歩行者、軽車両・バイク、他車両等)を判別するパッシブセンサも含まれる。
センサ部1−Bは、車両の周辺の歩行者や軽車両・バイク、他車両等の障害物を検知して、当該障害物の種類を示す情報及び当該障害物と車両との距離情報を取得する情報処理部も備える。このようにしてセンサ部1−Bで取得された情報は危険地区判定部2に通知される。
【0071】
なお、センサ部1−Bが危険地区判定部2へ情報を通知するタイミングは、危険地区判定部2が常にセンサ部1−Bを監視するのではなく、任意の一定時間ごともしくは任意の一定距離の走行ごとに、危険地区判定部2がセンサ部1−Bから情報を収集するようにしてもよい。この任意の時間及び走行距離は、車両の内又は外の少なくとも一方の環境変化に応じて動的に変化させても構わない。この環境変化とは、周辺の障害物等の変化が挙げられる。例えば、周囲に障害物が多い区間は一定時間及び走行距離を短くすることにより情報取得の回数を多くし、周囲に障害物が少ない区間は一定時間及び走行距離を長くすることで情報取得の回数を少なくしても良い。また、一定時間及び走行距離を設定することができるスイッチ等の機構を設け、ユーザの操作によって変化させても良い。このように動的に情報を取得するタイミングを変化させることにより、効率の良い処理を行うことができる。
【0072】
危険地区判定部2は、センサ部1−Bから取得した情報を用いて、走行中の区間の危険の度合いを調べ、ユーザが任意に警告音をオフしてしまうと危険である危険地区かどうかを判定する。危険地区と判定した場合、危険地区判定部2は、走行区間が危険地区であることを警告音オフ制御禁止装置3へ通知する。
【0073】
図16は、実施の形態2における記憶装置2−Aに記憶される判定テーブルの一例(例1)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、センサ部1−Bから取得した上記情報に基づいて、図16に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。例えば、図16は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定1の「周辺に歩行者がいるか?」の条件に合致した場合を示している。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0074】
図17は、実施の形態2における記憶装置2−Aに記憶される判定テーブルの他の例(例2)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、条件内容に対応した危険の度合いを示す点数(危険度)を追加したものを、危険地区判定部2の判定結果とともに示している。危険度は、実施の形態1と同様に、例えば危険性が大きい場合を10、危険性が小さい場合を1とし、その間にレベル2〜9を割り付ける。
【0075】
危険地区判定部2は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間に合致する条件内容に対応付けられた危険度が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
【0076】
図17の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定1の「周辺に歩行者がいるか?」の条件に合致している。この場合、判定1の条件内容に対応する危険度“8”が閾値“8”以上であるので、「危険地区」と判定される。
【0077】
図18は、実施の形態2における記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、障害物と自車との距離に関する追加条件と、条件内容に対応した危険度を、危険地区判定部2の判定結果とともに示している。
図17に示した判定テーブルでは、例えば「周辺に歩行者がいるか?」という条件内容に危険度“8”を付与していたが、歩行者と車両とが所定の距離範囲以上離れている場合には、当該危険度は過剰である。
そこで、図18に示すように「周辺に歩行者がいるか?」という条件内容においても、追加条件として、歩行者と自車との距離が、歩行者を検知したセンサ部1−Bのセンサを中心とした「半径3m〜5m」であれば、危険度を“5”とし、歩行者と自車の距離が「半径3m以内」では、歩行者との接触の危険が予想されるので、危険度を“9”とする。
【0078】
なお、図18の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定1の「周辺に歩行者がいるか?」の条件及びその追加条件「半径3m以内」に合致するとともに、判定2の「周辺に軽車両・バイクがあるか?」の条件及びその追加条件「半径5m〜7m」に合致している。この場合には、判定1の条件及び追加条件に対応する危険度“9”と判定2の条件及び追加条件に対応する危険度“4”との和である“13”が閾値“8”以上であるので、「危険地区」であると判定される。
【0079】
また、自車の走行区間を危険地区と判定する条件内容には、以下の例が挙げられる。
先ず、センサ部1−Bで検知された障害物と自車の距離が近い場合(障害物を検知したセンサ部1−Bのセンサを中心とした半径が所定距離の範囲内)や、障害物が複数存在する場合、障害物と自車との距離が時間経過に伴って近付いている場合には、自車の走行区間を危険地区と判定してもよい。
【0080】
安全地区から危険地区へ判定される条件と、危険地区から安全地区へ判定される条件とが同じ場合に、危険地区と安全地区の境界を走行中に、不必要に判定結果が頻繁に変わる可能性がある。これについては、危険地区から安全地区へと判定を更新する場合に、一度の判定結果で危険地区と判定するのではなく、複数回にわたって連続して危険地区と判定されたときに、安全地区から危険地区に更新するようにしてもよい。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
【0081】
また、実施の形態2において、警告音オフ制御禁止装置3の構成は、上記実施の形態1で示した図8の構成と同様である。スイッチ4、車外スピーカ6、車内スピーカ7及び表示装置8の構成や機能についても、上記実施の形態1で説明した内容と同様である。さらに、警告音発生装置5の構成は、上記実施の形態1で示した図9又は図10の構成と同様である。
以降の説明において、実施の形態2における車外への音発生装置の構成については、図15に加え、図8〜10を参照する。
【0082】
次に動作について説明する。
図19は、実施の形態2の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、センサ部1−Bを構成する、車体の前方、側面、及び後方のいずれかあるいは全部に1つもしくは複数取り付けたセンサが、車両の周辺の歩行者や、軽車両・バイク、他車両等の障害物を検知し、当該障害物の種類を示す情報と、当該障害物と車両との間における距離情報を取得する(ステップST2−1)。センサ部1−Bで取得された上記情報は、危険地区判定部2に通知される。
【0083】
危険地区判定部2は、センサ部1−Bから入力した障害物と自車との間の距離情報と、記憶装置2−Aから読み出した所定の判定条件とに基づいて、自車両が走行する道路区間の危険度を調べ、出力ゲイン値判定部5eへ出力する。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST2−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
【0084】
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
【0085】
また、危険地区判定部2は、センサ部1−Bで取得された情報の危険の度合いを点数にして、各情報の点数もしくは複数の情報の点数の総和に応じて危険度を決定してもよい。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
【0086】
上述の説明では、警告音発生装置5が、出力ゲイン値判定部5eを備える場合を示したが、図9に示すように、出力ゲイン値判定部5eを有さない構成の場合には、警告音の出力音量の変更処理(ステップST2−2)は省略される。
【0087】
次に、危険地区判定部2は、センサ部1−Bで取得された障害物と自車との距離情報、及び、この障害物の種類(歩行者、軽車両・バイク、他の車両等)に基づいて、記憶装置2−Aから読み出した所定の判定条件を参照して危険度を決定し、この危険度を示す情報に基づいて、自車が走行中の区間が危険地区であるか否かを判定する(ステップST2−3)。ここで、危険地区であると判定すると(ステップST2−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST2−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
【0088】
以降、ステップST2−4からステップST2−11までの処理は、上記実施の形態1で図11を用いて説明したステップST1−4からステップST1−11までの処理と同様である。また、実施の形態2の車外への音発生装置が、図19の処理を実行している間に、車両のキースイッチがオフされると、上記実施の形態1で説明した図12のシステム終了の割り込みが発生する。さらに、スイッチ4で警告音の発生をオフ制御する操作のみ行える場合における図13の割り込み処理と、スイッチ4で警告音の発生をオフ制御する操作とオン制御する操作の双方が行える場合における図14の割り込み処理は、実施の形態2の構成においても適用することができる。
【0089】
以上のように、この実施の形態2によれば、危険地区を走行する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部であるセンサ部1−Bとを備え、センサ部1−Bで取得された車両周辺の歩行者や、バイク・軽車両、他車両等の障害物の有無や障害物と車両の距離情報と、記憶装置2−Aから読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、外部から警告音の出力停止を指示するスイッチ4の操作がなされても、車両が危険地区を走行していると判定されていると、警告音の出力を停止しない。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、センサ部1−Bとしては、車両に予め搭載されたコーナーセンサ等のセンサを利用することが可能である。
【0090】
実施の形態3.
図20は、この発明の実施の形態3による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図20において、実施の形態3における車外への音発生装置は、上記実施の形態1で説明した図2の構成におけるナビゲーション装置1−Aの代わりに、カメラ部1−Cを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
【0091】
カメラ部1−Cは、リアカメラやドライブレコーダ、赤外線カメラ等の車外もしくは車内に取り付けられた映像を撮影して記録する装置を備える。カメラ部1−Cを構成するカメラ装置の個数は、1つであっても、複数使用しても構わない。カメラ部1−Cで取得された情報は、危険地区判定部2に通知される。
また、カメラ部1−Cは、車外を撮影した映像データを画像解析して、車両周辺の歩行者や軽車両・バイク、他車両等の障害物の有無、障害物と車両との距離情報、標識情報、走行道路情報、天候や時間帯の情報を取得する情報処理部を備える。
なお、走行道路情報とは、道幅、一般道路又は高速道路等の道路の種類、制限速度、交差点、カーブ等を示す情報であり、撮影された道路形態や標識等から判断される。
また、天候や時間帯は、撮影された車外映像内の空の状況や日照量の変化を画像解析で特定することで判断する。
【0092】
なお、カメラ部1−Cが危険地区判定部2へ情報を通知するタイミングは、危険地区判定部2が常にカメラ部1−Cを監視するのではなく、任意の一定時間ごともしくは任意の一定距離の走行ごとに、危険地区判定部2がカメラ部1−Cから情報を収集するようにしてもよい。この任意の時間及び走行距離は、車両の内又は外の少なくとも一方の環境変化に応じて動的に変化させても構わない。この環境変化とは、時間帯、車速度、天候、走行区間の周辺施設等の変化があげられる。例えば、周辺が明るい時間帯は一定時間及び走行距離を短くすることにより情報取得の回数を多くし、周辺が暗い深夜のような時間帯には一定時間及び走行距離を長くすることで情報取得の回数を少なくしても良い。また、一定時間及び走行距離を設定することができるスイッチ等の機構を設けて、ユーザの操作によって変化させても良い。このように動的に情報を取得するタイミングを変化させることにより、効率の良い処理を行うことができる。
【0093】
低速走行時のみに警告音を発生させる場合、危険地区判定部2が、カメラ部1−Cから制限速度情報のみを常に収集し、スクールゾーン等における所定の低速度の制限速度範囲内では、上記危険地区判定に用いる情報のうち、制限速度情報の他の情報も取得し、上記制限速度範囲外(高速道路等の高速の制限速度等)においては、車速情報以外を取得しないようにしてもよい。また、常に収集する情報は、自車の走行速度を把握できる情報であれば、制限速度情報以外であってもよい。
【0094】
危険地区判定部2は、カメラ部1−Cから取得した情報を用いて、走行中の区間の危険の度合いを調べ、ユーザが任意に警告音をオフしてしまうと危険である危険地区かどうかを判定する。危険地区と判定した場合、危険地区判定部2は、走行区間が危険地区であることを警告音オフ制御禁止装置3へ通知する。
【0095】
図21は、実施の形態3における記憶装置2−Aに記憶される判定テーブルの一例(例1)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、カメラ部1−Cから取得した上記情報に基づいて、図21に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。例えば、図21は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定1の「周辺に障害物があるか?」の条件に合致した場合を示している。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0096】
図22は、実施の形態3における記憶装置2−Aに記憶される判定テーブルの他の例(例2)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、条件内容に対応した危険の度合いを示す点数(危険度)を追加したものを、危険地区判定部2の判定結果とともに示している。危険度は、実施の形態1と同様に、例えば危険性が大きい場合を10、危険性が小さい場合を1とし、その間にレベル2〜9を割り付ける。
【0097】
危険地区判定部2は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間に合致する条件内容に対応付けられた危険度が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
【0098】
図22の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定3の「道幅は狭いか?」の条件と判定4の「交差点を走行中か?」の条件に合致している。この場合には、判定3の条件に対応する危険度“5”と判定4の条件に対応する危険度“4”との和である“9”が閾値“8”以上であるので、「危険地区」であると判定される。
【0099】
図23は、実施の形態3における記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、障害物と自車との距離及び道幅に関する追加条件と、条件内容に対応した危険度を、危険地区判定部2の判定結果とともに示している。
図22に示した判定テーブルでは、一定の道幅(例えば10m)を基準として「道幅は狭いか?」という条件内容に危険度“5”を付与していたが、上記一定幅以内の道路であっても、道路脇の歩行者との距離を十分にあけられる道幅である場合には、当該危険度は過剰である。
そこで、図23に示すように「道幅は狭いか?」という条件内容においても、追加条件として、道路脇の歩行者との距離を十分にあけられる「5m〜10m」であれば、危険度を“3”とし、道路脇の歩行者との距離が近い状態での走行が予想される「5m以内」では、危険度を“6”とする。
【0100】
なお、図23の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定1の「周辺に障害物があるか?」の条件及びその追加条件「半径3m〜5m」に合致するとともに、判定3の「道幅が狭いか?」の条件及びその追加条件「5m〜10m」に合致している。この場合は、判定1の条件及び追加条件に対応する危険度“5”と判定3の条件及び追加条件に対応する危険度“3”との和である“8”が閾値“8”以上であるので、「危険地区」であると判定される。
【0101】
また、自車の走行区間を危険地区と判定する条件内容には、以下の例が挙げられる。
先ず、カメラ部1−Cで検知された障害物と自車の距離が近い場合(障害物を検知したカメラ部1−Cのカメラを中心とした半径が所定距離の範囲内)や、障害物が複数存在する場合、障害物と自車との距離が時間経過に伴って近付いている場合には、自車の走行区間を危険地区と判定してもよい。
【0102】
走行道路情報から、道幅が狭い場合や、自車が交差点又はカーブを走行する場合、右左折を行う場合は、危険地区を走行中と判定する。
高速道路では危険地区を走行中でないと判定し、サービスエリアでは危険地区を走行中であると判定してもよい。
自車の走行道路の制限速度が低い場合は、住宅街等の歩行者が多い地区である可能性が高いので、制限速度が任意の閾値以下であれば、自車が危険地区を走行中であると判定してもよい。
【0103】
標識情報から、周辺に小学校や商店街等の施設が存在すると判断した場合は、子供の飛び出しや周囲に歩行者が多い等の危険性が高いので、危険地区を走行中であると判定してもよい。
【0104】
時間帯の情報を用いる場合は、警告音停止状態による走行が危険な時間帯を走行時には危険地区を走行中であると判定してもよい。例えば、周囲の騒音が大きくなる時間帯は、車両の走行音が聞こえにくくなるため、危険地区を走行中と判定する。
また、周囲が暗くなる時間帯は、運転手の視野角が狭まるため、危険地区を走行中と判定してもよい。この場合、ライトの点灯があれば、視覚的に周囲が車両に気付きやすいため、危険地区を走行中でないと判定してもよい。
【0105】
周辺施設情報と現在時刻情報とを組み合わせて、危険地区であるかどうかを判定してもよい。例えば、商店街が周辺に存在したとしても、店舗が閉店すると人通りが少なくなるため、現在時刻情報と組み合わせて、開店時間中は危険地区と判定し、閉店時間以降は危険地区でないと判定してもよい。
【0106】
天候情報を判定に用いてもよい。例えば、雨が降っている場合は、走行音が雨によってさらに聞こえにくくなる可能性がある。そのため、雨を検知した場合もしくは任意の閾値以上の雨量を認識した場合は、危険地区を走行中であると判定してもよい。
【0107】
安全地区から危険地区へ判定される条件と、危険地区から安全地区へ判定される条件とが同じ場合に、危険地区と安全地区の境界を走行中に、不必要に判定結果が頻繁に変わる可能性がある。これについては、危険地区から安全地区へと判定を更新する場合に、一度の判定結果で危険地区と判定するのではなく、複数回にわたって連続して危険地区と判定されたときに、安全地区から危険地区に更新するようにしてもよい。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
【0108】
また、実施の形態3において、警告音オフ制御禁止装置3の構成は、上記実施の形態1で示した図8の構成と同様である。スイッチ4、車外スピーカ6、車内スピーカ7及び表示装置8の構成や機能についても、上記実施の形態1で説明した内容と同様である。さらに、警告音発生装置5の構成は、上記実施の形態1で示した図9又は図10の構成と同様である。
以降の説明において、実施の形態3における車外への音発生装置の構成については、図20に加え、図8〜10を参照する。
【0109】
次に動作について説明する。
図24は、実施の形態3の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、カメラ部1−Cが、車両周辺の障害物情報を取得し(ステップST3−1a)、標識情報を取得する(ステップST3−1b)。
さらに、カメラ部1−Cは、走行道路情報、天候又は時間帯の少なくとも一方の情報を取得する(ステップST3−1c、ステップST3−1d)。これらの情報は、カメラ部1−Cから危険地区判定部2へ出力される。
【0110】
危険地区判定部2は、カメラ部1−Cから入力した情報と、記憶装置2−Aから読み出した所定の判定条件とに基づいて、自車両が走行する道路区間の危険度を調べ、出力ゲイン値判定部5eへ出力する。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST3−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
【0111】
また、危険地区判定部2は、カメラ部1−Cで取得された情報の危険の度合いを点数にして、各情報の点数もしくは複数の情報の点数の総和に応じて危険度を決定してもよい。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
【0112】
上述の説明では、警告音発生装置5が、出力ゲイン値判定部5eを備える場合を示したが、図9に示すように、出力ゲイン値判定部5eを有さない構成の場合には、警告音の出力音量の変更処理(ステップST3−2)は省略される。
【0113】
次に、危険地区判定部2は、カメラ部1−Cで取得した情報に基づいて記憶装置2−Aから読み出した所定の判定条件を参照して危険度を決定し、この危険度を示す情報に基づいて、自車が走行中の区間が危険地区であるか否かを判定する(ステップST3−3)。
ここで、危険地区であると判定すると(ステップST3−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST3−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
【0114】
以降、ステップST3−4からステップST3−11までの処理は、上記実施の形態1で図11を用いて説明したステップST1−4からステップST1−11までの処理と同様である。また、実施の形態3の車外への音発生装置が、図24の処理を実行している間に、車両のキースイッチがオフされると、上記実施の形態1で説明した図12のシステム終了の割り込みが発生する。さらに、スイッチ4で警告音の発生をオフ制御する操作のみ行える場合における図13の割り込み処理と、スイッチ4で警告音の発生をオフ制御する操作とオン制御する操作の双方が行える場合における図14の割り込み処理は、実施の形態3の構成においても適用することができる。
【0115】
以上のように、この実施の形態3によれば、危険地区を走行する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部であるカメラ部1−Cとを備え、カメラ部1−Cで取得された障害物の有無や、障害物と車両の距離情報、標識情報、走行道路情報、天候や時間帯等のリアルタイムな情報と、記憶装置2−Aから読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、外部から警告音の出力停止を指示するスイッチ4の操作がなされても、車両が危険地区を走行していると判定されていると、警告音の出力を停止しない。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、カメラ部1−Cとしては、車両に予め搭載されたドライブレコーダやリアカメラ等のカメラを利用することが可能である。
【0116】
実施の形態4.
図25は、この発明の実施の形態4による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図25において、実施の形態4における車外への音発生装置は、上記実施の形態1で説明した図2の構成におけるナビゲーション装置1−Aの代わりに、車載装置1−Dを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
【0117】
車載装置1−Dは、車速信号を検知する車速センサ、後退ギアが入ったことを示すバック信号や、ライト、ウィンカー及びワイパーが操作されたことを示す操作信号を取得する機器、及びETC(Electronic Toll Collection)(登録商標;以下記載を省略する)や光ビーコン等の路車間通信装置を含む車載に備え付けられた機器である。車載装置1−Dで取得された情報は、危険地区判定部2に通知される。
【0118】
なお、車載装置1−Dが危険地区判定部2へ情報を通知するタイミングは、危険地区判定部2が常に車載装置1−Dを監視するのではなく、任意の一定時間ごともしくは任意の一定距離の走行ごとに、危険地区判定部2が車載装置1−Dから情報を収集するようにしてもよい。この任意の時間及び走行距離は、車両の内又は外の少なくとも一方の環境変化に応じて動的に変化させても構わない。この環境変化とは、時間帯、車速度、天候等の変化が挙げられる。例えば、車速が一定速度より遅い場合は、一定時間及び走行距離を短くすることにより情報取得の回数を多くし、車速が一定速度より速い場合には一定時間及び走行距離を長くすることで情報取得の回数を少なくしても良い。また、一定時間及び走行距離を設定することができるスイッチ等の機構を設け、ユーザの操作によって変化させても良い。このように動的に情報を取得するタイミングを変化させることにより、効率の良い処理を行うことができる。
【0119】
低速走行時のみに警告音を発生させる場合、危険地区判定部2が、車載装置1−Dから車速信号のみを常に収集して、所定の車速範囲内では、上記危険地区判定に用いる情報のうち、車速信号の他の情報も取得し、上記所定の車速範囲外(高速走行時)においては、車速信号以外を取得しないようにしてもよい。また、常に収集する情報は、自車の走行速度を把握できる情報であれば、車速信号以外であってもよい。
【0120】
危険地区判定部2は、車載装置1−Dから取得した情報を用いて、走行中の区間の危険の度合いを調べ、ユーザが任意に警告音をオフしてしまうと危険である危険地区かどうかを判定する。危険地区と判定した場合、危険地区判定部2は、走行区間が危険地区であることを警告音オフ制御禁止装置3へ通知する。
【0121】
図26は、実施の形態4における記憶装置2−Aに記憶される判定テーブルの一例(例1)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、車載装置1−Dから取得した車速情報、ライト点灯の有無、ウィンカーの作動の有無、ワイパーの作動の有無、バック走行するか否かを示す情報等に基づいて、図26に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。例えば、図26は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定1の「低速(任意の閾値以下)走行をしているか?」の条件に合致した場合を示している。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0122】
図27は、実施の形態4における記憶装置2−Aに記憶される判定テーブルの他の例(例2)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、条件内容に対応した危険の度合いを示す点数(危険度)を追加したものを、危険地区判定部2の判定結果とともに示している。危険度は、実施の形態1と同様に、例えば危険性が大きい場合を10、危険性が小さい場合を1とし、その間にレベル2〜9を割り付ける。
【0123】
危険地区判定部2は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間に合致する条件内容に対応付けられた危険度が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
【0124】
図27の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定2の「ライトを点灯しているか?」の条件と判定3の「ウィンカーは作動しているか?」の条件に合致している。この場合には、判定2の条件に対応する危険度“4”と判定3の条件に対応する危険度“4”との和である“8”が閾値“8”以上であるので、「危険地区」であると判定される。
【0125】
図28は、実施の形態4における記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、車速に関する追加条件と、条件内容に対応した危険度を、危険地区判定部2の判定結果とともに示している。
図27に示した判定テーブルでは、任意の閾値(例えば、時速30km)を基準として「低速走行をしているか?」という条件内容に危険度“8”を付与していたが、上記閾値以下の車速であっても、歩行者に自車の存在を認知させる場面が少ないことが予想されるある程度速い車速範囲である場合には、当該危険度は過剰である。
そこで、図28に示すように「低速走行をしているか?」という条件内容においても、追加条件として、歩行者に自車の存在を認知させる場面が少ないことが予想される「時速20〜30km」であれば、危険度を“4”とし、歩行者に自車の存在を認知させる場面が多いことが予想される「時速20km以内」では、危険度を“9”とする。
【0126】
なお、図28の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定1の「低速走行をしているか?」の条件及びその追加条件「時速20〜30km」に合致するとともに、判定4の「ワイパーは作動しているか?」の条件に合致している。この場合は、判定1の条件及び追加条件に対応する危険度“4”と判定4の条件に対応する危険度“4”との和である“8”が閾値“8”以上であるので、「危険地区」であると判定される。
【0127】
また、自車の走行区間を危険地区と判定する条件内容には、以下の例が挙げられる。
電気自動車は、低速走行時の騒音が非常に小さく周囲に認知されにくい。
そこで、車速信号から得られる走行速度情報を用いて、走行速度が任意の閾値よりも小さい場合、危険地区を走行中であると判定する。
逆に、高速走行時は速度が出ている分、危険度が増すので、走行速度が任意の閾値以上である場合に危険地区を走行中であると判定してもよい。
【0128】
後方進行時は、前方進行時よりも運転手の視野が狭まり、大変危険である。
そこで、バック信号から得られる車両の後方進行時は、危険地区を走行中であると判定してもよい。
【0129】
ライトの操作信号からライト点灯の有無を示す情報が得られる。
ライトが点灯されている場合、視覚的に周囲が車両に気付きやすいため、危険地区を走行中でないと判定してもよい。
逆に、ライトが点灯されているときは、車両周辺が暗く、運転手は障害物の認知が難しくなるため、危険地区を走行中と判定してもよい。
【0130】
ウィンカーの操作信号から、車両の左折又は右折を示す情報が得られる。
左折又は右折時は、死角が多く、警告音がない状態の走行は大変危険である。
そこで、ウィンカーの操作信号によって車両の左折又は右折が認知された場合は、危険地区を走行中であると判定してもよい。
また、ウィンカーの操作信号からは車線変更の情報も得られる。
車線変更時は、周囲の他の車両に自車両の存在に気付いてもらう必要があるので、危険地区を走行中であると判定してもよい。
【0131】
ワイパーの操作信号から、車外で雨が降っているか否かの情報が得られる。
雨が降っている場合、雨によって走行音がさらに聞こえにくくなる可能性がある。
そこで、ワイパーの作動時には、危険地区を走行中であると判定してもよい。
また、ワイパーの速度にあわせて危険地区を走行中か否かを判定してもよい。
【0132】
ETCや光ビーコンを含む路車間通信機器からは、高速道路か一般道路かといった自車が走行中の道路の種類が得られる。
この場合、高速道路では、歩行者はいないため危険地区を走行中でないと判定する。
しかし、サービスエリア内は歩行者が存在するので危険地区を走行中であると判定してもよい。
【0133】
安全地区から危険地区へ判定される条件と、危険地区から安全地区へ判定される条件とが同じ場合に、危険地区と安全地区の境界を走行中に、不必要に判定結果が頻繁に変わる可能性がある。これについては、危険地区から安全地区へと判定を更新する場合に、一度の判定結果で危険地区と判定するのではなく、複数回にわたって連続して危険地区と判定されたときに、安全地区から危険地区に更新するようにしてもよい。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
【0134】
また、実施の形態4において、警告音オフ制御禁止装置3の構成は、上記実施の形態1で示した図8の構成と同様である。スイッチ4、車外スピーカ6、車内スピーカ7及び表示装置8の構成や機能についても、上記実施の形態1で説明した内容と同様である。さらに、警告音発生装置5の構成は、上記実施の形態1で示した図9又は図10の構成と同様である。
以降の説明において、実施の形態4における車外への音発生装置の構成については、図25に加え、図8〜10を参照する。
【0135】
次に動作について説明する。
図29は、実施の形態4の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、車載装置1−Dが、車速信号を取得し(ステップST4−1a)、バック信号を取得する(ステップST4−1b)。
さらに、車載装置1−Dは、ライト情報、ウィンカー情報、ワイパー情報、及び路車間通信情報を取得する(ステップST4−1c、ステップST4−1d、ステップST4−1e、ステップST4−1f)。これらの情報は、車載装置1−Dから危険地区判定部2へ出力される。
【0136】
危険地区判定部2は、車載装置1−Dから入力した情報と、記憶装置2−Aから読み出した所定の判定条件とに基づいて、自車両が走行する道路区間の危険度を調べ、出力ゲイン値判定部5eへ出力する。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST4−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
【0137】
また、危険地区判定部2は、車載装置1−Dで取得された情報の危険の度合いを点数にして、各情報の点数もしくは複数の情報の点数の総和に応じて危険度を決定してもよい。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
【0138】
上述の説明では、警告音発生装置5が、出力ゲイン値判定部5eを備える場合を示したが、図9に示すように、出力ゲイン値判定部5eを有さない構成の場合には、警告音の出力音量の変更処理(ステップST4−2)は省略される。
【0139】
次に、危険地区判定部2は、車載装置1−Dで取得した情報に基づいて記憶装置2−Aから読み出した所定の判定条件を参照して危険度を決定し、この危険度を示す情報に基づいて、自車が走行中の区間が危険地区であるか否かを判定する(ステップST4−3)。
ここで、危険地区であると判定すると(ステップST4−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST4−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
【0140】
以降、ステップST4−4からステップST4−11までの処理は、上記実施の形態1で図11を用いて説明したステップST1−4からステップST1−11までの処理と同様である。また、実施の形態4の車外への音発生装置が、図29の処理を実行している間に、車両のキースイッチがオフされると、上記実施の形態1で説明した図12のシステム終了の割り込みが発生する。さらに、スイッチ4で警告音の発生をオフ制御する操作のみ行える場合における図13の割り込み処理と、スイッチ4で警告音の発生をオフ制御する操作とオン制御する操作の双方が行える場合における図14の割り込み処理は、実施の形態4の構成においても適用することができる。
【0141】
以上のように、この実施の形態4によれば、危険地区を走行する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部である車載装置1−Dとを備え、車載装置1−Dで取得された情報と、記憶装置2−Aから読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、外部から警告音の出力停止を指示するスイッチ4の操作がなされても、車両が危険地区を走行していると判定されていると、警告音の出力を停止しない。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、車載装置1−Dとしては、車両に予め搭載された車速信号を検知する車速センサ、後退ギアが入ったことを示すバック信号や、ライト、ウィンカー及びワイパーが操作されたことを示す操作信号を取得する機器、及び路車間通信装置を利用することが可能である。
【0142】
実施の形態5.
図30は、この発明の実施の形態5による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図30において、実施の形態5における車外への音発生装置は、危険地区判定情報取得装置として、上記実施の形態1で説明したナビゲーション装置1−A、上記実施の形態2で説明したセンサ部1−B、上記実施の形態3で説明したカメラ部1−C、及び上記実施の形態4で説明した車載装置1−Dを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
【0143】
実施の形態5における上記危険地区判定情報取得装置は、上記実施の形態1〜4と同様の動作によって、現在時刻情報、現在位置情報、走行道路情報(道幅、一般又は高速道路等の道路の種類、制限速度、交差点、カーブ等)、事故多発地区情報、周辺施設情報、車両周辺の障害物の有無や、障害物と車両の距離情報等を取得し、危険地区判定部2に通知する。
【0144】
なお、上記危険地区判定情報取得装置が危険地区判定部2へ情報を通知するタイミングは、危険地区判定部2が常に上記危険地区判定情報取得装置を監視するのではなく、任意の一定時間ごともしくは任意の一定距離の走行ごとに、危険地区判定部2が上記危険地区判定情報取得装置から情報を収集するようにしてもよい。この任意の時間及び走行距離は、車両の内又は外の少なくとも一方の環境変化に応じて動的に変化させても構わない。この環境変化とは、時間帯、車速度、天候、走行区間の周辺施設等の変化が挙げられる。例えば、時間帯が8時から20時までの間は、一定時間及び走行距離を短くすることにより情報取得の回数を多くし、時間帯が20時から8時までの間は、一定時間及び走行距離を長くすることで情報取得の回数を少なくしても良い。また、一定時間及び走行距離を設定することができるスイッチ等の機構を設けて、ユーザの操作によって変化させても良い。このように動的に情報を取得するタイミングを変化させることにより、効率の良い処理を行うことができる。
【0145】
低速走行時のみに警告音を発生させる場合、危険地区判定部2が、上記危険地区判定情報取得装置から車速情報のみを常に収集して、所定の車速範囲内では、上記危険地区判定に用いる情報のうち、車速情報の他の情報も取得し、上記所定の車速範囲外(高速走行時)においては、車速情報以外を取得しないようにしてもよい。また、常に収集する情報は、自車の走行速度を把握できる情報であれば、車速情報以外であってもよい。
【0146】
危険地区判定部2は、実施の形態5の危険地区判定情報取得装置から取得した情報を用いて、走行中の区間の危険の度合いを調べ、ユーザが任意に警告音をオフしてしまうと危険である危険地区かどうかを判定する。危険地区と判定した場合、危険地区判定部2は、走行区間が危険地区であることを警告音オフ制御禁止装置3へ通知する。
【0147】
図31は、実施の形態5における記憶装置2−Aに記憶される判定テーブルの一例(例1)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、実施の形態5の危険地区判定情報取得装置から取得した情報に基づいて、図31に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。
例えば、図31は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が、センサ部1−Bで取得された情報によって判定11の「周辺に歩行者がいるか?」の条件に合致し、カメラ部1−Cで取得された情報によって判定21の「周辺に障害物があるか?」の条件に合致した場合を示している。つまり、センサ部1−Bで検出された歩行者が、カメラ部1−Cで障害物として検出されている。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0148】
図32は、実施の形態5における記憶装置2−Aに記憶される判定テーブルの他の例(例2)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、自車の走行時間に関する条件を追加したものを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、実施の形態5の危険地区判定情報取得装置から取得した上記情報に基づいて、図32に示す判定テーブルの条件内容が追加条件とともに自車の走行区間に対して成り立つか否かで危険地区を判定する。
【0149】
図32の例では、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が、ナビゲーション装置1−Aで取得された情報によって判定02の「周辺に小学校があるか?」の条件に合致し、かつ追加条件の「登下校時間中」にも合致しており、カメラ部1−Cで取得された情報によって判定22の「スクールゾーンを走行中か?」の条件に合致し、かつ追加条件の「登下校時間中」にも合致した場合を示している。このように判定テーブルのいずれかの条件及び追加条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0150】
図33は、実施の形態5における記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、条件内容に対応した危険の度合いを示す点数(危険度)を追加したものを、危険地区判定部2の判定結果とともに示している。危険度は、実施の形態1と同様に、例えば危険性が大きい場合を10、危険性が小さい場合を1とし、その間にレベル2〜9を割り付ける。
【0151】
危険地区判定部2は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間に合致する条件内容に対応付けられた危険度が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
【0152】
図33の例では、危険度に関する閾値が“8”であり、自車の走行区間が、ナビゲーション装置1−Aで取得された情報によって判定05の「制限速度が時速20km以下か?」という条件に合致し、車載装置1−Dで取得された情報によって判定31の「低速走行をしているか?」の条件に合致している。この場合には、判定05の条件に対応する危険度“3”と判定31の条件に対応する危険度“8”との和である“11”が閾値“8”以上であるので、「危険地区」であると判定される。
【0153】
図34は、実施の形態5における記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、走行時間帯、障害物と自車との距離、道幅、及び車速に関する追加条件と、条件内容に対応した危険度を、危険地区判定部2の判定結果とともに示している。
図33に示した判定テーブルでは、任意の閾値(例えば、時速30km)を基準として「低速走行をしているか?」という条件内容に危険度“8”を付与していたが、上記閾値以下の車速であっても、歩行者に自車の存在を認知させる場面が少ないことが予想されるある程度速い車速範囲である場合には、当該危険度は過剰である。
そこで、図34に示すように「低速走行をしているか?」という条件内容においても、追加条件として、歩行者に自車の存在を認知させる場面が少ないことが予想される「時速20〜30km」であれば、危険度を“4”とし、歩行者に自車の存在を認知させる場面が多いことが予想される「時速20km以内」では、危険度を“9”とする。
【0154】
なお、図34の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定2の「周辺に小学校があるか?」の条件及び追加条件「登下校時間外」に合致しており、さらに判定22の「スクールゾーンを走行中か?」の条件及び追加条件「登下校時間外」に合致し、判定31の「低速走行をしているか?」の条件及び追加条件「時速20〜30km」に合致している。この場合は、判定2の条件及び追加条件に対応する危険度“3”と判定22の条件及び追加条件に対応する危険度“3”と判定31の条件及び追加条件に対応する危険度“4”との和である“10”が閾値“8”以上であるので、「危険地区」であると判定される。
【0155】
安全地区から危険地区へ判定される条件と、危険地区から安全地区へ判定される条件とが同じ場合に、危険地区と安全地区の境界を走行中に、不必要に判定結果が頻繁に変わる可能性がある。これについては、危険地区から安全地区へと判定を更新する場合に、一度の判定結果で危険地区と判定するのではなく、複数回にわたって連続して危険地区と判定されたときに、安全地区から危険地区に更新するようにしてもよい。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
【0156】
また、実施の形態5において、警告音オフ制御禁止装置3の構成は、上記実施の形態1で示した図8の構成と同様である。スイッチ4、車外スピーカ6、車内スピーカ7及び表示装置8の構成や機能についても、上記実施の形態1で説明した内容と同様である。さらに、警告音発生装置5の構成は、上記実施の形態1で示した図9又は図10の構成と同様である。
以降の説明において、実施の形態5における車外への音発生装置の構成については、図30に加え、図8〜10を参照する。
【0157】
次に動作について説明する。
図35は、実施の形態5の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、ナビゲーション装置1−Aは、GPS受信機によって現在時刻情報を取得し、現在位置情報を取得し、走行道路情報、事故多発地区情報、周辺施設情報を取得する(ステップST5−1a)。
また、センサ部1−Bが、車両の周辺の歩行者や、軽車両・バイク、他車両等の障害物を検知し、当該障害物の種類を示す情報と、当該障害物と車両との間における距離情報を取得する(ステップST5−1b)。
カメラ部1−Cが、車両周辺の障害物情報を取得し、標識情報を取得し、走行道路情報、天候又は時間帯の少なくとも一方の情報を取得する(ステップST5−1c)。
車載装置1−Dが、車速信号を取得し、バック信号を取得し、ライト情報、ウィンカー情報、ワイパー情報、及び路車間通信情報を取得する(ステップST5−1d)。
これらの情報は、実施の形態5の危険地区判定情報取得装置からの危険地区判定情報として、ナビゲーション装置1−A、センサ部1−B、カメラ部1−C及び車載装置1−Dから危険地区判定部2へ出力される。
【0158】
危険地区判定部2は、実施の形態5の危険地区判定情報取得装置から入力した情報と、記憶装置2−Aから読み出した所定の判定条件とに基づいて、自車両が走行する道路区間の危険度を調べ、出力ゲイン値判定部5eへ出力する。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST5−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
【0159】
また、危険地区判定部2は、実施の形態5の危険地区判定情報取得装置で取得された情報の危険の度合いを点数にして、各情報の点数もしくは複数の情報の点数の総和に応じて危険度を決定してもよい。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
【0160】
上述の説明では、警告音発生装置5が、出力ゲイン値判定部5eを備える場合を示したが、図9に示すように、出力ゲイン値判定部5eを有さない構成の場合には、警告音の出力音量の変更処理(ステップST5−2)は省略される。
【0161】
次に、危険地区判定部2は、実施の形態5の危険地区判定情報取得装置で取得した情報に基づいて記憶装置2−Aから読み出した所定の判定条件を参照して危険度を決定し、この危険度を示す情報に基づいて、自車が走行中の区間が危険地区であるか否かを判定する(ステップST5−3)。
ここで、危険地区であると判定すると(ステップST5−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST5−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
【0162】
以降、ステップST5−4からステップST5−11までの処理は、上記実施の形態1で図11を用いて説明したステップST1−4からステップST1−11までの処理と同様である。また、実施の形態5の車外への音発生装置が、図35の処理を実行している間に、車両のキースイッチがオフされると、上記実施の形態1で説明した図12のシステム終了の割り込みが発生する。さらに、スイッチ4で警告音の発生をオフ制御する操作のみ行える場合における図13の割り込み処理と、スイッチ4で警告音の発生をオフ制御する操作とオン制御する操作の双方が行える場合における図14の割り込み処理は、実施の形態5の構成においても適用することができる。
【0163】
以上のように、この実施の形態5によれば、危険地区を走行する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部である、ナビゲーション装置1−A、センサ部1−B、カメラ部1−C、車載装置1−Dとを備え、ナビゲーション装置1−A、センサ部1−B、カメラ部1−C、車載装置1−Dで取得された情報と、記憶装置2−Aから読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、外部から警告音の出力停止を指示するスイッチ4の操作がなされても、車両が危険地区を走行していると判定されていると、警告音の出力を停止しない。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
【0164】
この発明に係る車外への音発生装置は、車両が危険な区間を走行中であるか否かに応じて、使用者による警告音の停止の可否を制御することができることから、走行音の小さい電気自動車等の擬似走行音の発生装置に好適である。
【技術分野】
【0001】
この発明は、電気自動車等のモータ駆動する車両に搭載され、自車を認知させるために車外に音を発生する車外への音発生装置に関するものである。
【背景技術】
【0002】
電気自動車やハイブリッド車のようにモータで動作する車両では、エンジンで動作する車両と比べて走行音が小さく、周辺の歩行者が通行を感知することが難しい。そのため、車両の接近による危険を周囲に知らせることを目的として、車外に擬似騒音などの警告音を発生させる動きが広まってきている。
【0003】
一方、標準状態では警告音を発生するが、周辺の安全性が確保されている場合の使用を前提として、一時発音停止スイッチの装備も認められている。自車両が、歩行者のいないエリアを走行している場合、運転者は、この一時発音停止スイッチを使用することで警告音(擬似騒音)の発生を止めることができる。
【0004】
しかしながら、運転者が警告音の発生及び停止を自由に制御できる場合、警告音が必要な状況であっても、警告音の発生を停止したままであると、肝心なときに警告音が発生しない恐れがある。
また、近年、車外の道路状況や時間帯、歩行者の有無等の様々な条件で警告音を自動的に発生させるシステムが提案されているが、使用者が、警告音の発生を停止させた場合、停止してから自動的に警告音が出力されるまでに不可避的にタイムラグが発生する。
【0005】
さらに、安全性が確保されていない状況で、使用者が、任意にシステムを制御して警告音を停止した場合、歩行者が、自車両の接近に気付かない走行時間が生じる恐れがある。これは、本来の警告音発生装置の目的を満足しておらず危険である。
【0006】
例えば、特許文献1には、車両(自車)の発進が検知されると、自車と他の車両との間の距離が基準距離以下であっても、警報の停止又は出力レベルの軽減を禁止する制限禁止手段を設けた車両警報装置が開示されている。
しかしながら、この装置では、使用者が、警報の発生及び停止を制御可能な場合を前提としておらず、また車両の発進時における動作に制限されている。
このため、車外に警告音を発生する必要があるエリアに自車が存在する場合において、使用者が警告音を停止する危険を回避するものではない。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2006−264525号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
この発明は、上記のような課題を解決するためになされたもので、車両が危険な区間を走行中であるか否かに応じて、使用者による警告音の停止の可否を制御することができる車外への音発生装置を得ることを目的とする。
【課題を解決するための手段】
【0009】
この発明に係る車外への音発生装置は、車両に搭載され、車外に音を出力する車外への音発生装置であって、車外への音を発生させる音発生部と、走行地区を危険地区と判定する車両の状況が記述された判定条件を記憶する記憶部と、車両の状況としてカーナビゲーション装置、センサ部、カメラ部により得られる情報、車速信号、バック信号、ライト情報、ウィンカー情報、ワイパー情報または路車間通信情報を取得する情報取得部と、情報取得部によって取得された車両の状況を示す情報と、記憶部から読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定する判定部と、音発生部の出力を制御するとともに、外部からの音の出力停止を指示する制御信号にかかわらず、判定部によって車両が危険地区を走行していると判定されている場合は、音発生部の出力を停止しない制御部とを備え、判定は、情報取得部によって取得された車両の状況を示す情報に基づいて行われるものである。
【発明の効果】
【0010】
この発明によれば、車両の状況としてカーナビゲーション装置、センサ部、カメラ部により得られる情報、車速信号、バック信号、ライト情報、ウィンカー情報、ワイパー情報または路車間通信情報を取得する情報取得部と、情報取得部によって取得された車両の状況を示す情報と、記憶部から読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定することができる。これにより、自車の走行を認識させるべき走行地区で確実に音を発生することが可能であり、当該地区での安全性を向上させることができるという効果がある。
【図面の簡単な説明】
【0011】
【図1】この発明の車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図2】実施の形態1の車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図3】記憶装置に記憶される判定テーブルの一例(例1)を示す図である。
【図4】記憶装置に記憶される判定テーブルの他の例(例2)を示す図である。
【図5】記憶装置に記憶される判定テーブルの他の例(例3)を示す図である。
【図6】記憶装置に記憶される判定テーブルの他の例(例4)を示す図である。
【図7】車両の走行に伴う安全地区と危険地区との変遷を示す図である。
【図8】図1,2の警告音オフ制御禁止装置の構成を示すブロック図である。
【図9】図1,2の警告音発生装置の構成を示すブロック図である。
【図10】図1,2の警告音発生装置の他の構成を示すブロック図である。
【図11】実施の形態1の車外への音発生装置による動作の流れを示すフローチャートである。
【図12】システム終了の割り込みルーチンを示すフローチャートである。
【図13】スイッチ操作に応じた割り込み処理の流れを示すフローチャートである。
【図14】スイッチ操作に応じた他の割り込み処理の流れを示すフローチャートである。
【図15】この発明の実施の形態2による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図16】実施の形態2における記憶装置に記憶される判定テーブルの一例(例1)を示す図である。
【図17】実施の形態2における記憶装置に記憶される判定テーブルの一例(例2)を示す図である。
【図18】実施の形態2における記憶装置に記憶される判定テーブルの一例(例3)を示す図である。
【図19】実施の形態2の車外への音発生装置による動作の流れを示すフローチャートである。
【図20】この発明の実施の形態3による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図21】実施の形態3における記憶装置に記憶される判定テーブルの一例(例1)を示す図である。
【図22】実施の形態3における記憶装置に記憶される判定テーブルの一例(例2)を示す図である。
【図23】実施の形態3における記憶装置に記憶される判定テーブルの一例(例3)を示す図である。
【図24】実施の形態3の車外への音発生装置による動作の流れを示すフローチャートである。
【図25】この発明の実施の形態4による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図26】実施の形態4における記憶装置に記憶される判定テーブルの一例(例1)を示す図である。
【図27】実施の形態4における記憶装置に記憶される判定テーブルの一例(例2)を示す図である。
【図28】実施の形態4における記憶装置に記憶される判定テーブルの一例(例3)を示す図である。
【図29】実施の形態4の車外への音発生装置による動作の流れを示すフローチャートである。
【図30】この発明の実施の形態5による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。
【図31】実施の形態5における記憶装置に記憶される判定テーブルの一例(例1)を示す図である。
【図32】実施の形態5における記憶装置に記憶される判定テーブルの一例(例2)を示す図である。
【図33】実施の形態5における記憶装置に記憶される判定テーブルの一例(例3)を示す図である。
【図34】実施の形態5における記憶装置に記憶される判定テーブルの一例(例4)を示す図である。
【図35】実施の形態5の車外への音発生装置による動作の流れを示すフローチャートである。
【発明を実施するための形態】
【0012】
以下、この発明をより詳細に説明するため、この発明を実施するための形態について、添付の図面に従って説明する。
実施の形態1.
図1は、この発明の車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図1において、このシステムは、危険地区情報取得装置(情報取得部)1、危険地区判定部(判定部)2、記憶装置(記憶部)2−A、警告音オフ制御禁止装置(制御部)3、スイッチ4、警告音発生装置(制御部)5、車外スピーカ6、車内スピーカ(提示部)7、及び表示装置(提示部)8を備える。なお、以降の説明では、自車の走行を周囲の歩行者等に警告する(認知させる)車外への音を、警告音と記載する。警告音と呼んでも、必ずしもサイレンなどのように緊急事態を連想させるような音である必要はなく、車両が存在することを歩行者等に認識できるような音であれば、どのような音でもよい。警告音は、従来の内燃機関を動力源とするガソリン車やディーゼル車やバイクなどの車両の走行状態を想起させる連続音のような音が望ましいが、笛、ベル、太鼓などから出るような音でもよい。
危険地区情報取得装置1は、自車両が走行中の区間情報を取得する装置であり、ナビゲーション装置、センサ部、カメラ部及び車載装置のうちの少なくとも1つで構成される。これらの態様は、本実施の形態、実施の形態2〜5で後述する。
【0013】
危険地区判定部2は、危険地区情報取得装置1で取得された走行中の区間情報と、記憶装置2−Aに記憶された所定の判定条件とに基づいて、自車両が走行する道路区間が危険地区であるか否かを判定する構成部である。
警告音オフ制御禁止装置3は、危険地区判定部2によって自車の走行区間が危険地区であると判定されると、警告音オフ制御禁止信号をスイッチ4及び警告音発生装置5へ出力する装置である。
スイッチ4は、使用者が警告音をオンオフ制御するためのスイッチ(一時発音停止スイッチ)である。つまり、当該スイッチ4の操作が、外部から警告音(車外への音)の出力停止を指示する所定操作に相当する。なお、スイッチ4は、警告音オフ制御禁止信号を受けると、使用者が任意に警告音を停止できないように出力信号を制御する。
【0014】
音発生部である警告音発生装置5は、警告音の発生を制御する装置であって、車外スピーカ6を介して警告音を出力する。なお、この警告音とは、自車の接近による危険を周囲に知らせることを目的として車外に出力する擬似騒音である。また、警告音発生装置5は、警告音オフ制御禁止装置3から警告音オフ制御禁止信号を受けると、スイッチ4からの制御信号に拘わらず警告音のオフ制御を禁止する。
【0015】
さらに、警告音発生装置5に警告音オフ制御禁止信号が入力されるか、若しくは自車の走行区間が危険地区であると判定されると、警告音オフ制御禁止装置3から、警告音オフ制御禁止告知信号が、車内スピーカ7及び表示装置8に出力される。これにより、車内スピーカ7又は表示装置8を介して、使用者に対して警告音のオフ制御が禁止されている旨や当該禁止の理由が通知される。
【0016】
図2は、実施の形態1の車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図2に示すシステムは、図1の危険地区情報取得装置1として、ナビゲーション装置1−Aを用いている。
ナビゲーション装置1−Aは、地図情報データベースやGPS受信機、走行道路の情報を受信する通信部を備え、現在時刻情報や現在位置情報、走行道路情報(道幅、一般・高速道路等の道路の種類、制限速度、交差点、カーブ等)、事故多発地区情報、周辺施設情報などを取得して、危険地区判定部2に通知する。
なお、危険地区判定部2が、ナビゲーション装置1−Aによって取得される上記情報の内容を常に監視し、内容に変化があると、当該情報をナビゲーション装置1−Aから取得するようにしてもよい。
【0017】
また、ナビゲーション装置1−Aが取得する情報の内容を常に監視するのではなく、一定時間ごと、若しくは一定距離を自車が走行するごとに、危険地区判定部2が、ナビゲーション装置1−Aから上記情報を取得するようにしても構わない。この一定時間及び走行距離は、車両の内又は外の少なくとも一方の環境変化に応じて動的に変化させてもよい。この環境変化とは、時間帯、車速度、天候、走行区間の周辺施設等の変化があげられる。例えば、時間帯が8時から20時までの間は一定時間及び走行距離を短くすることにより情報取得の回数を多くし、時間帯が20時から8時までの間には一定時間及び走行距離を長くすることによって情報取得の回数を少なくしても良い。また、一定時間及び走行距離を設定することができるスイッチ等の機構を設け、ユーザの操作によって変化させても良い。このように動的に情報を取得するタイミングを変化させることで、効率の良い処理を行うことができる。
【0018】
低速走行時のみに警告音を発生させる場合、危険地区判定部2が、ナビゲーション装置1−Aから車速情報のみを常に収集して、所定の低車速範囲内では、上記危険地区判定に用いる情報のうち、車速情報の他の情報も取得し、上記低車速範囲外(高速走行時など)においては、車速情報以外を取得しないようにしてもよい。また、常に収集する情報は、自車の走行速度を把握できる情報であれば、車速情報以外であってもよい。
【0019】
危険地区判定部2は、ナビゲーション装置1−Aから取得した上記情報と記憶装置2−Aに記憶された所定の判定条件とを用いて、自車が走行中の区間の危険の度合いを調べ、使用者が任意に警告音をオフすると危険な危険地区か否かを判定する。
危険地区と判定した場合、危険地区判定部2は、走行区間が危険地区であることを警告音オフ制御禁止装置3へ通知する。
【0020】
図3は、記憶装置2−Aに記憶される判定テーブルの一例(例1)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルを、危険地区判定部2の判定結果とともに示している。危険地区判定部2は、ナビゲーション装置1−Aから取得した上記情報に基づいて、図3に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで危険地区を判定する。図3の例では、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定3の「交差点を走行中か?」の条件に合致した場合を示している。このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0021】
図4は、記憶装置2−Aに記憶される判定テーブルの他の例(例2)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、自車の走行時間に関する条件を追加したものを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、ナビゲーション装置1−Aから取得した上記情報に基づいて、図4に示す判定テーブルの条件内容が追加条件とともに自車の走行区間に対して成り立つか否かで危険地区を判定する。
【0022】
図4の例では、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定2の「周辺に小学校があるか?」の条件に合致し、かつ追加条件の「登下校時間中」にも合致した場合を示している。このように判定テーブルのいずれかの条件及び追加条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
なお、判定2の「周辺に小学校があるか?」の条件に合致しても、自車の走行時間が、追加条件の「登下校時間中」に合致しない場合は危険地区と判定しない。
【0023】
図5は、記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、条件内容に対応した危険の度合いを示す点数(危険度)を追加したものを、危険地区判定部2の判定結果とともに示している。危険度は、例えば危険性が大きい場合を10、危険性が小さい場合を1とし、その間にレベル2〜9を割り付ける。
【0024】
危険地区判定部2は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間に合致する条件内容に対応付けられた危険度が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
【0025】
図5の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定3の「交差点を走行中か?」の条件と、判定4の「右左折を行うか?」の条件とに合致している。この場合、判定3の条件内容に対応する危険度“4”と判定4の条件内容に対応する危険度“5”との和である“9”が、上記閾値“8”以上であるので、「危険地区」であると判定されている。
【0026】
図6は、記憶装置2−Aに記憶される判定テーブルの他の例(例4)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、自車の走行時間帯に関する追加条件と、条件内容に対応した危険度を、危険地区判定部2の判定結果とともに示している。
図5に示した判定テーブルでは、例えば「周辺に小学校があるか?」という条件内容に危険度“5”を付与していたが、登下校時間外の人通りが少なくなっている時間帯では、当該危険度は過剰である。
そこで、図6に示すように、「周辺に小学校があるか?」という条件内容においても、追加条件として、時間帯が「登下校時間外」であれば、危険度を“3”とし、「登下校時間中」であれば、人通りの増加が予想されるので、危険度を最高の“10”とする。
【0027】
なお、図6の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定2の「周辺に小学校があるか?」の条件及びその追加条件「登下校時間中」に合致するとともに、判定4の「交差点を走行中か?」の条件に合致している。この場合には、判定2の条件及び追加条件に対応する危険度“10”と判定4の条件に対応する危険度“5”との和である“15”が閾値“8”以上であるので、「危険地区」であると判定されている。
【0028】
また、自車の走行区間を危険地区と判定する条件内容には、以下の例が挙げられる。
先ず、走行道路情報から特定された自車の走行道路の道幅が狭い場合(所定の道幅以下)や、自車が交差点又はカーブを走行する場合、右左折を行う場合には、自車の走行区間を危険地区と判定してもよい。
また、高速道路では危険地区を走行中でないと判定し、サービスエリアでは危険地区を走行中であると判定してもよい。
さらに、自車の走行道路の制限速度が低い場合は、住宅街等の歩行者が多い地区である可能性が高いので、制限速度が任意の閾値以下であれば、自車が危険地区を走行中であると判定してもよい。
【0029】
自車が走行中の道路が事故多発地区である場合や、周辺に小学校や商店街などの施設が存在する場合には、子供の飛び出しや周囲に歩行者が多い等の危険性が高いため、危険地区を走行中であると判定してもよい。
【0030】
現在時刻情報を用いる場合、警告音停止状態による走行が危険と判断される時間帯は、自車が危険地区を走行していると判定してもよい。
例えば、周囲の騒音が大きくなる時間帯は、車両の走行音が聞こえにくくなるため、危険地区を走行中と判定する。また、周囲が暗くなる時間帯では、運転手の視野角が狭まるため、危険地区を走行中と判定してもよい。この場合、ライトの点灯があれば、視覚的に周囲が車両に気付きやすいため、危険地区を走行中でないと判定してもよい。
【0031】
また、1つの条件だけで危険地区を判定するのではなく、周辺施設情報と現在時刻情報とを組み合わせて、自車が走行中の区間は、危険地区であるか否かを判定してもよい。
例えば、商店街が周辺に存在しても、店舗が閉店すると人通りが少なくなるため、現在時刻情報と組み合わせて、開店時間中は危険地区と判定し、閉店時間以降は危険地区ではないと判定してもよい。
【0032】
さらに、安全地区から危険地区へと判定される条件と、危険地区から安全地区へと判定される条件が同じ場合、危険地区と安全地区の境界を走行中に、不必要に判定結果が頻繁に変わる可能性がある。
これについては、危険地区から安全地区へと判定を更新する場合には、一度の判定結果で危険地区と判定するのではなく、複数回にわたって連続して危険地区と判定されたときに、安全地区から危険地区に更新するようにしてもよい。
【0033】
図7は、車両の走行に伴う安全地区と危険地区との変遷を示す図であって、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせた場合を示している。上述した危険地区と安全地区の境界を走行中に判定結果が頻繁に変わる不具合を解消するため、図7に示すように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせ、境界領域では、所定のルールで判定を行う。
【0034】
図7の例では、上記所定のルールとして、車両の危険度が、危険地区の開始閾値を一度超えると、安全地区の開始閾値以下になるまで、危険地区の判定が継続され、安全地区を走行する車両の危険度が安全地区の開始閾値を超えても安全地区と判定する。これにより、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値との差に相当する危険度領域で判定結果が頻繁に変わることを防止できる。
【0035】
図8は、図1,2の警告音オフ制御禁止装置の構成を示すブロック図である。図8に示すように、警告音オフ制御禁止装置3は、警告音オフ制御禁止信号生成部3a、告知信号生成部3b、表示信号処理部3c及び音声信号処理部3dを備える。
警告音オフ制御禁止信号生成部3aは、危険地区判定部2よって走行区間が危険地区と判定されると、警告音のオフ制御を禁止する信号を生成して、スイッチ4又は警告音発生装置5に通知する構成部である。
【0036】
告知信号生成部3bは、常に警告音オフ制御の状態を監視しており、新たな危険地区の判定結果によって警告音オフ制御の状態に変化があると、警告音オフ制御禁止告知信号を生成し、表示信号処理部3c及び音声信号処理部3dに通知する構成部である。
警告音オフ制御禁止告知信号とは、例えば、警告音オフ制御禁止の開始又は停止、危険地区の開始又は停止、スイッチ4の利用不可の開始又は停止といった警告音オフ制御の状態をユーザに告知するための信号である。
【0037】
表示信号処理部3c及び音声信号処理部3dは、告知信号生成部3bから通知された警告音オフ制御禁止告知信号を、車内スピーカ7又は表示装置8で出力可能な信号に変換して、車内スピーカ7又は表示装置8にそれぞれ出力する構成部である。
【0038】
なお、告知信号生成部3bは、警告音オフ制御禁止中にスイッチ4が押下された場合であっても、警告音オフ制御禁止中である、危険地区を走行中である、スイッチが利用不可であるといった旨の警告音オフ制御禁止告知信号を生成する。この場合においても、表示信号処理部3c及び音声信号処理部3dは、告知信号生成部3bから通知された警告音オフ制御禁止告知信号を、車内スピーカ7又は表示装置8で出力可能な信号に変換して出力する。
【0039】
スイッチ4は、ユーザが任意に操作することで、少なくとも警告音をオフ制御するスイッチである。なお、スイッチ4としては、押下等の操作によって、警告音のオフ制御のみを行うものでもよいし、警告音のオン制御とオフ制御の双方を行うものであってもよい。
警告音オフ制御禁止装置3よってスイッチ4が警告音オフ制御禁止信号を受け取った場合には、ユーザが、スイッチ4を用いて警告音のオフ操作を行っても、警告音をオフ制御することができないようにする。例えば、オン状態でロックをかけることで、オフ操作が不可能な機構にする。
また、スイッチ4にLED(Light Emitting Diode)等の表示機器を取り付けて、警告音オフ制御禁止かオフ制御可能かの状態を直接表示させることで、ユーザが、わざわざ車内スピーカ7や表示装置8の確認をすることなく、スイッチ4の操作と同時に警告音オフ制御状態を確認できるようにする。
【0040】
図9は、図1,2の警告音発生装置の構成を示すブロック図である。図9において、警告音発生装置5は、警告音発生システムを構成する装置であり、警告音停止制御部5a、警告音発生判定部5b、警告音生成部5c及びスピーカ出力処理部5dを備える。
警告音停止制御部5aは、スイッチ4が押下された場合に、スイッチ4がオン操作されたのか、オフ操作されたのかを判定し、警告音オン信号もしくは警告音オフ信号を警告音発生判定部5bに通知する構成部である。
【0041】
警告音発生判定部5bは、警告音停止制御部5aから警告音オン信号を得ると、警告音生成部5cに対して警告音を生成する指示を出力し、警告音オフ信号を得た場合は警告音生成部5cに対して警告音の生成を停止するように指示をする構成部である。
なお、警告音発生判定部5bは、警告音オフ制御禁止装置3から、警告音オフ制御禁止信号が通知された場合は、スイッチ4の操作に応じた警告音オフ信号の有無に拘わらず、警告音の発生を停止しないと判定する。つまり、警告音オフ制御禁止装置3から通知される警告音オフ制御禁止信号の方が、スイッチ4の操作信号(警告音オフ制御信号)よりも警告音発生の判定の優先度が高い。
【0042】
警告音生成部5cは、警告音データを生成する構成部であって、警告音発生判定部5bから警告音の発生を指示されると、警告音データをスピーカ出力処理部5dに出力し、警告音発生判定部5bから警告音の停止が指示されると、警告音データの生成を停止してスピーカ出力処理部5dに何も出力しない。スピーカ出力処理部5dでは、警告音生成部5cから受け取った警告音データを車外スピーカ6で適切に出力できるように、チャンネル数や音量の増幅などの音響処理を行う構成部である。
【0043】
図10は、図1,2の警告音発生装置の他の構成を示すブロック図である。図10に示す警告音発生装置5は、図9で示した構成に対して、出力ゲイン値判定部5eを追加している。出力ゲイン値判定部5eは、危険地区判定部2で調べた危険度に応じて、出力する警告音のゲイン値を設定する構成部である。スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定されたゲイン値を用いて、出力する警告音の音量調整を行う。
【0044】
車外スピーカ6は、車外に取り付けられた1つ又は複数のスピーカであり、警告音発生に用いる。車内スピーカ7は、車内に備え付けられた1つ又は複数のスピーカである。
表示装置8は、車内に備え付けられたディスプレイ等の表示機器であり、カーナビゲーションやLED、インストルパネルの表示機器を含む。
車内スピーカ7又は表示装置8は、警告音オフ制御禁止装置3から警告音オフ制御禁止告知信号を受け取り、スイッチ4で警告音のオフ操作が実行されない旨又は警告音を停止できない旨をユーザに伝える。また、危険地区を走行中にユーザが誤ってスイッチ4を警告音オフに押下した場合は、スイッチ4でオフ操作が実行されない旨又は警告音を停止できない旨をユーザに伝える。なお、ユーザへの上記通知は、車内スピーカ7又は表示装置8のうちの少なくとも一方で行われる。
【0045】
次に動作について説明する。
図11は、実施の形態1の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、ナビゲーション装置1−Aが、主電源であるバッテリから電力供給されて起動する。続いて、ナビゲーション装置1−Aは、GPS受信機によって現在時刻情報を取得し(ステップST1−1a)、現在位置情報を取得する(ステップST1−1b)。また、自車の走行に伴い、ナビゲーション装置1−Aは、現在位置情報に基づいて、地図情報データベースから、走行道路情報、事故多発地区情報、周辺施設情報を取得する(ステップST1−1c、ステップST1−1d、ステップST1−1e)。これらの情報は、ナビゲーション装置1−Aから危険地区判定部2へ出力される。
【0046】
危険地区判定部2は、ナビゲーション装置1−Aから入力した自車の走行区間情報と、記憶装置2−Aから読み出した所定の判定条件とに基づいて、自車両が走行する道路区間の危険度を調べ、出力ゲイン値判定部5eへ出力する。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST1−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
【0047】
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
【0048】
また、危険地区判定部2は、ナビゲーション装置1−Aで取得された各情報の危険の度合いを点数にして、各情報の点数もしくは複数の情報の点数の総和に応じて危険度を決定してもよい。例えば、現在時刻情報が「登下校時間」等の人通りの多い時間帯であるか否かに応じて危険の度合いを示す点数を付与し、現在位置情報が「小学校」等の多数の人が収容される施設の周辺に位置しているか否かで危険の度合いを示す点数を付与し、走行道路情報が上記のような施設に面した道路であるか否かで危険の度合いを示す点数を付与し、走行地区で事故が多発していることを示す事故多発地区情報に危険の度合いを示す点数を付与し、周辺施設情報で多数の人が収容される施設があるか否かで危険の度合いを示す点数を付与する。各情報の点数をそのまま危険度としてもよいし、複数の情報の点数の総和を危険度としてもよい。
【0049】
上述の説明では、警告音発生装置5が、出力ゲイン値判定部5eを備える場合を示したが、図9に示すように、出力ゲイン値判定部5eを有さない構成の場合には、警告音の出力音量の変更処理(ステップST1−2)は省略される。
【0050】
次に、危険地区判定部2は、ナビゲーション装置1−Aから取得した自車の走行区間に関する情報(現在時刻情報、現在位置情報、走行道路情報、事故多発地区情報、周辺施設情報)、及び、この走行区間情報と記憶装置2−Aから読み出した所定の判定条件とを参照して決定した危険度を示す情報に基づいて、自車が走行中の区間が危険地区であるか否かを判定する(ステップST1−3)。ここで、危険地区であると判定すると(ステップST1−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST1−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
【0051】
警告音オフ制御禁止装置3が危険地区判定部2から危険地区である旨の判定結果を入力した時点で、警告音オフ制御禁止装置3内の警告音オフ制御禁止信号生成部3aが、既に警告音オフ制御禁止信号を生成していれば、警告音のオフ制御が禁止中であり(ステップST1−4;禁止中)、ステップST1−1aの処理に戻る。
【0052】
また、危険地区である旨の判定結果を入力した時点で、警告音オフ制御禁止信号を生成しておらず、警告音のオフ制御が可能な状態であれば(ステップST1−4;制御可)、警告音オフ制御禁止信号生成部3aは、警告音オフ制御禁止信号を生成して、スイッチ4又は警告音発生装置5へ出力する。スイッチ4又は警告音発生装置5は、警告音オフ制御禁止信号を入力すると、スイッチ4の操作(押下)による警告音のオフ制御の禁止を開始する(ステップST1−5)。
【0053】
告知信号生成部3bは、危険地区判定部2から危険地区である旨の判定結果を入力してから、警告音のオフ制御の状態の変化(オフ制御の禁止へ変化)を認識すると、警告音オフ制御告知信号を生成して、表示信号処理部3c及び音声信号処理部3dへ出力する。
なお、告知信号生成部3bは、例えば、スイッチ4が警告音オフ制御禁止信号を受けているか否かに基づいて、警告音のオフ制御の状態の変化を認識する。
【0054】
表示信号処理部3c及び音声信号処理部3dは、告知信号生成部3bから入力した警告音オフ制御禁止告知信号を、表示装置8及び車内スピーカ7で出力可能な信号に変換して表示装置8及び車内スピーカ7にそれぞれ出力する。これにより、車内スピーカ7及び表示装置8から、警告音のオフ制御の禁止が開始された旨が、ユーザに通知される(ステップST1−6)。
【0055】
このとき、警告音生成部5cは、警告音発生判定部5bから警告音の生成を指示される以前に、スイッチ4が押下されて自身が警告音データを生成していなかった場合(ステップST1−7;YES)、直ちに警告音データを生成し、スピーカ出力処理部5dへ出力する。これにより、スピーカ出力処理部5dは、車外スピーカ6から、警告音を発生させる(ステップST1−8)。この後、ステップST1−1aの処理へ戻る。
【0056】
一方、ステップST1−3で危険地区でない(安全地区である)と判定され、警告音オフ制御禁止信号生成部3aが、危険地区判定部2から危険地区でない旨の判定結果を入力した時点で、警告音オフ制御禁止信号を生成しておらず、警告音のオフ制御が可能な状態であれば(ステップST1−9;制御可)、ステップST1−1aの処理に戻る。
【0057】
また、告知信号生成部3bは、危険地区判定部2から危険地区でない(安全地区である)旨の判定結果を入力してから、警告音のオフ制御が禁止中であることを認識すると(ステップST1−9;禁止中)、警告音のオフ制御の禁止の終了を示す警告音オフ制御告知信号を生成して、表示信号処理部3c及び音声信号処理部3dへ出力する。
【0058】
表示信号処理部3c及び音声信号処理部3dでは、告知信号生成部3bから通知された警告音オフ制御禁止告知信号を、車内スピーカ7又は表示装置8で出力可能な信号に変換して、車内スピーカ7又は表示装置8にそれぞれ出力する。これにより、車内スピーカ7又は表示装置8から、警告音のオフ制御の禁止が終了した旨が、ユーザに通知される(ステップST1−10)。
なお、警告音のオフ制御の禁止の開始及び停止時のみ、ユーザへ通知するのではなく、警告音のオフ制御の禁止中は、常に警告音のオフ制御が禁止されている等の旨を車内スピーカ7又は表示装置8から、ユーザに通知し続けてもよい。
【0059】
警告音オフ制御禁止信号生成部3aは、危険地区判定部2から危険地区でない旨の判定結果を入力すると、スイッチ4又は警告音発生装置5への警告音オフ制御禁止信号の出力を停止する。スイッチ4又は警告音発生装置5は、警告音オフ制御禁止信号生成部3aによる警告音オフ制御禁止信号の出力が停止されると、警告音のオフ制御の禁止を終了する(ステップST1−11)。この後、ステップST1−1aの処理に戻る。
【0060】
図12は、システム終了の割り込みルーチンを示すフローチャートである。実施の形態1の車外への音発生装置が、上述した図11の処理を実行している間、キースイッチの状態で処理が継続又は終了される(ステップST1a−1)。車両のキースイッチがオンであれば(ステップST1a−1;ON)、車外への音発生装置は、図11の処理を継続する。ユーザによって、車両のキースイッチがオフされると(ステップST1a−1;YES)、図11の処理の途中で割り込みが発生し、システムが終了する。
【0061】
図13は、スイッチ操作に応じた割り込み処理の流れを示すフローチャートであり、スイッチ4によって警告音の発生をオフ制御する操作のみ行える場合における割り込み処理を示している。
先ず、告知信号生成部3bは、スイッチ4の押下による操作信号(警告音オフ制御信号)を入力した時点で、当該スイッチ4に警告音オフ制御禁止信号が出力されていれば(ステップST1b−1;禁止中)、警告音のオフ制御が禁止中であることを示す警告音オフ制御告知信号を生成して、表示信号処理部3c及び音声信号処理部3dへ出力する。
これにより、車内スピーカ7及び表示装置8は、音声信号処理部3d及び表示信号処理部3cの制御によって警告音のオフ制御が禁止中である旨をユーザに通知し(ステップST1b−2)、割り込みが終了する。
なお、危険地区判定部2が、スイッチ4で警告音のオフ制御をしてはいけない理由として、危険地区と判定した結果の条件(自車の状況に合致した判定項目)を、警告音オフ制御禁止装置3を介して車内スピーカ7又は表示装置8を介してユーザに提示するようにしてもよい。
【0062】
一方、警告音発生装置5内の警告音停止制御部5aは、スイッチ4の押下による操作信号を入力すると、警告音の発生停止を指示する警告音オフ信号を、警告音発生判定部5bへ出力する。警告音発生判定部5bは、警告音停止制御部5aから警告音オフ信号を入力した時点で、警告音オフ制御禁止装置3から警告音オフ制御禁止信号を受信していなければ(ステップST1b−1;制御可)、警告音生成部5cに対し警告音の生成を停止するように指示をする。警告音生成部5cが、警告音発生判定部5bからの指示に従って警告音データの生成を停止することで、警告音の出力が停止され(ステップST1b−3)、割り込みが終了する。
【0063】
図14は、スイッチ操作に応じた他の割り込み処理の流れを示すフローチャートであって、スイッチ4によって警告音の発生をオフ制御する操作とオン制御する操作の双方が行える場合における割り込み処理を示している。
先ず、警告音停止制御部5aが、スイッチ4の操作内容から、オフ制御されたか、オン制御されたかを判定する(ステップST1c−1)。この判定結果は、警告音停止制御部5aから警告音発生判定部5bへ出力される。
【0064】
一方、告知信号生成部3bは、スイッチ4で警告音のオフ制御の操作がなされた時点で(ステップST1c−1;OFF)、スイッチ4が警告音オフ制御禁止装置3から警告音オフ制御禁止信号を入力しており、警告音のオフ制御が禁止中であることを認識すると(ステップST1c−2;禁止中)、警告音のオフ制御の禁止中を示す警告音オフ制御告知信号を生成して表示信号処理部3c及び音声信号処理部3dへ出力する。
【0065】
表示信号処理部3c及び音声信号処理部3dでは、告知信号生成部3bから通知された警告音オフ制御禁止告知信号を、車内スピーカ7又は表示装置8で出力可能な信号に変換して、車内スピーカ7又は表示装置8にそれぞれ出力する。これにより、車内スピーカ7又は表示装置8から、警告音のオフ制御の禁止中である旨がユーザに通知され(ステップST1c−3)、割り込みが終了する。
なお、危険地区判定部2が、スイッチ4で警告音のオフ制御の操作をしてはいけない理由として、危険地区と判定した結果の条件(自車の状況に合致した判定項目)を、警告音オフ制御禁止装置3を介して車内スピーカ7又は表示装置8を介してユーザに提示するようにしてもよい。
【0066】
警告音発生判定部5bは、スイッチ4で警告音のオフ制御の操作がなされた判定結果を入力した時点で(ステップST1c−1;OFF)、警告音オフ制御禁止装置3から警告音オフ制御禁止信号を受信していなければ、警告音のオフ制御が可能であると判定し(ステップST1b−1;制御可)、警告音生成部5cに対して警告音の生成を停止するように指示をする。警告音生成部5cが、警告音発生判定部5bからの指示に従って、警告音データの生成を停止することで、警告音の出力が停止され(ステップST1c−4)、割り込みが終了する。
【0067】
また、警告音発生判定部5bは、警告音停止制御部5aからスイッチ4で警告音のオン制御の操作がなされた判定結果を入力すると(ステップST1c−1;ON)、警告音生成部5cに対して警告音を生成するように指示をする。警告音生成部5cが、警告音発生判定部5bからの指示に従って警告音データを生成しスピーカ出力処理部5dへ出力することで、警告音が出力され(ステップST1c−5)、割り込みが終了する。
【0068】
以上のように、この実施の形態1によれば、走行地区を危険地区と判定する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部であるナビゲーション装置1−Aとを備え、ナビゲーション装置1−Aで取得された時間帯、道路幅、制限速度、事故多発地区や道路の種別情報、周辺の施設情報と、記憶装置2−Aから読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、外部から警告音の出力停止を指示するスイッチ4の操作がなされても、車両が危険地区を走行していると判定されていると、警告音の出力を停止しない。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、ナビゲーション装置1−Aとしては、車載機器として既存のものを利用することが可能である。
【0069】
実施の形態2.
図15は、この発明の実施の形態2による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図15において、実施の形態2における車外への音発生装置は、上記実施の形態1で説明した図2の構成におけるナビゲーション装置1−Aの代わりに、センサ部1−Bを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
【0070】
センサ部1−Bは、超音波センサやミリ波レーダ等のセンサを有して構成されており、当該センサを、車体の前方、側面、及び後方のいずれかあるいは全部に1つもしくは複数取り付けている。また、センサには、上述のようなアクティブセンサに加え、車両周辺を撮像した画像を画像解析して障害物の種類(歩行者、軽車両・バイク、他車両等)を判別するパッシブセンサも含まれる。
センサ部1−Bは、車両の周辺の歩行者や軽車両・バイク、他車両等の障害物を検知して、当該障害物の種類を示す情報及び当該障害物と車両との距離情報を取得する情報処理部も備える。このようにしてセンサ部1−Bで取得された情報は危険地区判定部2に通知される。
【0071】
なお、センサ部1−Bが危険地区判定部2へ情報を通知するタイミングは、危険地区判定部2が常にセンサ部1−Bを監視するのではなく、任意の一定時間ごともしくは任意の一定距離の走行ごとに、危険地区判定部2がセンサ部1−Bから情報を収集するようにしてもよい。この任意の時間及び走行距離は、車両の内又は外の少なくとも一方の環境変化に応じて動的に変化させても構わない。この環境変化とは、周辺の障害物等の変化が挙げられる。例えば、周囲に障害物が多い区間は一定時間及び走行距離を短くすることにより情報取得の回数を多くし、周囲に障害物が少ない区間は一定時間及び走行距離を長くすることで情報取得の回数を少なくしても良い。また、一定時間及び走行距離を設定することができるスイッチ等の機構を設け、ユーザの操作によって変化させても良い。このように動的に情報を取得するタイミングを変化させることにより、効率の良い処理を行うことができる。
【0072】
危険地区判定部2は、センサ部1−Bから取得した情報を用いて、走行中の区間の危険の度合いを調べ、ユーザが任意に警告音をオフしてしまうと危険である危険地区かどうかを判定する。危険地区と判定した場合、危険地区判定部2は、走行区間が危険地区であることを警告音オフ制御禁止装置3へ通知する。
【0073】
図16は、実施の形態2における記憶装置2−Aに記憶される判定テーブルの一例(例1)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、センサ部1−Bから取得した上記情報に基づいて、図16に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。例えば、図16は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定1の「周辺に歩行者がいるか?」の条件に合致した場合を示している。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0074】
図17は、実施の形態2における記憶装置2−Aに記憶される判定テーブルの他の例(例2)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、条件内容に対応した危険の度合いを示す点数(危険度)を追加したものを、危険地区判定部2の判定結果とともに示している。危険度は、実施の形態1と同様に、例えば危険性が大きい場合を10、危険性が小さい場合を1とし、その間にレベル2〜9を割り付ける。
【0075】
危険地区判定部2は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間に合致する条件内容に対応付けられた危険度が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
【0076】
図17の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定1の「周辺に歩行者がいるか?」の条件に合致している。この場合、判定1の条件内容に対応する危険度“8”が閾値“8”以上であるので、「危険地区」と判定される。
【0077】
図18は、実施の形態2における記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、障害物と自車との距離に関する追加条件と、条件内容に対応した危険度を、危険地区判定部2の判定結果とともに示している。
図17に示した判定テーブルでは、例えば「周辺に歩行者がいるか?」という条件内容に危険度“8”を付与していたが、歩行者と車両とが所定の距離範囲以上離れている場合には、当該危険度は過剰である。
そこで、図18に示すように「周辺に歩行者がいるか?」という条件内容においても、追加条件として、歩行者と自車との距離が、歩行者を検知したセンサ部1−Bのセンサを中心とした「半径3m〜5m」であれば、危険度を“5”とし、歩行者と自車の距離が「半径3m以内」では、歩行者との接触の危険が予想されるので、危険度を“9”とする。
【0078】
なお、図18の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定1の「周辺に歩行者がいるか?」の条件及びその追加条件「半径3m以内」に合致するとともに、判定2の「周辺に軽車両・バイクがあるか?」の条件及びその追加条件「半径5m〜7m」に合致している。この場合には、判定1の条件及び追加条件に対応する危険度“9”と判定2の条件及び追加条件に対応する危険度“4”との和である“13”が閾値“8”以上であるので、「危険地区」であると判定される。
【0079】
また、自車の走行区間を危険地区と判定する条件内容には、以下の例が挙げられる。
先ず、センサ部1−Bで検知された障害物と自車の距離が近い場合(障害物を検知したセンサ部1−Bのセンサを中心とした半径が所定距離の範囲内)や、障害物が複数存在する場合、障害物と自車との距離が時間経過に伴って近付いている場合には、自車の走行区間を危険地区と判定してもよい。
【0080】
安全地区から危険地区へ判定される条件と、危険地区から安全地区へ判定される条件とが同じ場合に、危険地区と安全地区の境界を走行中に、不必要に判定結果が頻繁に変わる可能性がある。これについては、危険地区から安全地区へと判定を更新する場合に、一度の判定結果で危険地区と判定するのではなく、複数回にわたって連続して危険地区と判定されたときに、安全地区から危険地区に更新するようにしてもよい。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
【0081】
また、実施の形態2において、警告音オフ制御禁止装置3の構成は、上記実施の形態1で示した図8の構成と同様である。スイッチ4、車外スピーカ6、車内スピーカ7及び表示装置8の構成や機能についても、上記実施の形態1で説明した内容と同様である。さらに、警告音発生装置5の構成は、上記実施の形態1で示した図9又は図10の構成と同様である。
以降の説明において、実施の形態2における車外への音発生装置の構成については、図15に加え、図8〜10を参照する。
【0082】
次に動作について説明する。
図19は、実施の形態2の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、センサ部1−Bを構成する、車体の前方、側面、及び後方のいずれかあるいは全部に1つもしくは複数取り付けたセンサが、車両の周辺の歩行者や、軽車両・バイク、他車両等の障害物を検知し、当該障害物の種類を示す情報と、当該障害物と車両との間における距離情報を取得する(ステップST2−1)。センサ部1−Bで取得された上記情報は、危険地区判定部2に通知される。
【0083】
危険地区判定部2は、センサ部1−Bから入力した障害物と自車との間の距離情報と、記憶装置2−Aから読み出した所定の判定条件とに基づいて、自車両が走行する道路区間の危険度を調べ、出力ゲイン値判定部5eへ出力する。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST2−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
【0084】
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
【0085】
また、危険地区判定部2は、センサ部1−Bで取得された情報の危険の度合いを点数にして、各情報の点数もしくは複数の情報の点数の総和に応じて危険度を決定してもよい。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
【0086】
上述の説明では、警告音発生装置5が、出力ゲイン値判定部5eを備える場合を示したが、図9に示すように、出力ゲイン値判定部5eを有さない構成の場合には、警告音の出力音量の変更処理(ステップST2−2)は省略される。
【0087】
次に、危険地区判定部2は、センサ部1−Bで取得された障害物と自車との距離情報、及び、この障害物の種類(歩行者、軽車両・バイク、他の車両等)に基づいて、記憶装置2−Aから読み出した所定の判定条件を参照して危険度を決定し、この危険度を示す情報に基づいて、自車が走行中の区間が危険地区であるか否かを判定する(ステップST2−3)。ここで、危険地区であると判定すると(ステップST2−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST2−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
【0088】
以降、ステップST2−4からステップST2−11までの処理は、上記実施の形態1で図11を用いて説明したステップST1−4からステップST1−11までの処理と同様である。また、実施の形態2の車外への音発生装置が、図19の処理を実行している間に、車両のキースイッチがオフされると、上記実施の形態1で説明した図12のシステム終了の割り込みが発生する。さらに、スイッチ4で警告音の発生をオフ制御する操作のみ行える場合における図13の割り込み処理と、スイッチ4で警告音の発生をオフ制御する操作とオン制御する操作の双方が行える場合における図14の割り込み処理は、実施の形態2の構成においても適用することができる。
【0089】
以上のように、この実施の形態2によれば、危険地区を走行する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部であるセンサ部1−Bとを備え、センサ部1−Bで取得された車両周辺の歩行者や、バイク・軽車両、他車両等の障害物の有無や障害物と車両の距離情報と、記憶装置2−Aから読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、外部から警告音の出力停止を指示するスイッチ4の操作がなされても、車両が危険地区を走行していると判定されていると、警告音の出力を停止しない。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、センサ部1−Bとしては、車両に予め搭載されたコーナーセンサ等のセンサを利用することが可能である。
【0090】
実施の形態3.
図20は、この発明の実施の形態3による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図20において、実施の形態3における車外への音発生装置は、上記実施の形態1で説明した図2の構成におけるナビゲーション装置1−Aの代わりに、カメラ部1−Cを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
【0091】
カメラ部1−Cは、リアカメラやドライブレコーダ、赤外線カメラ等の車外もしくは車内に取り付けられた映像を撮影して記録する装置を備える。カメラ部1−Cを構成するカメラ装置の個数は、1つであっても、複数使用しても構わない。カメラ部1−Cで取得された情報は、危険地区判定部2に通知される。
また、カメラ部1−Cは、車外を撮影した映像データを画像解析して、車両周辺の歩行者や軽車両・バイク、他車両等の障害物の有無、障害物と車両との距離情報、標識情報、走行道路情報、天候や時間帯の情報を取得する情報処理部を備える。
なお、走行道路情報とは、道幅、一般道路又は高速道路等の道路の種類、制限速度、交差点、カーブ等を示す情報であり、撮影された道路形態や標識等から判断される。
また、天候や時間帯は、撮影された車外映像内の空の状況や日照量の変化を画像解析で特定することで判断する。
【0092】
なお、カメラ部1−Cが危険地区判定部2へ情報を通知するタイミングは、危険地区判定部2が常にカメラ部1−Cを監視するのではなく、任意の一定時間ごともしくは任意の一定距離の走行ごとに、危険地区判定部2がカメラ部1−Cから情報を収集するようにしてもよい。この任意の時間及び走行距離は、車両の内又は外の少なくとも一方の環境変化に応じて動的に変化させても構わない。この環境変化とは、時間帯、車速度、天候、走行区間の周辺施設等の変化があげられる。例えば、周辺が明るい時間帯は一定時間及び走行距離を短くすることにより情報取得の回数を多くし、周辺が暗い深夜のような時間帯には一定時間及び走行距離を長くすることで情報取得の回数を少なくしても良い。また、一定時間及び走行距離を設定することができるスイッチ等の機構を設けて、ユーザの操作によって変化させても良い。このように動的に情報を取得するタイミングを変化させることにより、効率の良い処理を行うことができる。
【0093】
低速走行時のみに警告音を発生させる場合、危険地区判定部2が、カメラ部1−Cから制限速度情報のみを常に収集し、スクールゾーン等における所定の低速度の制限速度範囲内では、上記危険地区判定に用いる情報のうち、制限速度情報の他の情報も取得し、上記制限速度範囲外(高速道路等の高速の制限速度等)においては、車速情報以外を取得しないようにしてもよい。また、常に収集する情報は、自車の走行速度を把握できる情報であれば、制限速度情報以外であってもよい。
【0094】
危険地区判定部2は、カメラ部1−Cから取得した情報を用いて、走行中の区間の危険の度合いを調べ、ユーザが任意に警告音をオフしてしまうと危険である危険地区かどうかを判定する。危険地区と判定した場合、危険地区判定部2は、走行区間が危険地区であることを警告音オフ制御禁止装置3へ通知する。
【0095】
図21は、実施の形態3における記憶装置2−Aに記憶される判定テーブルの一例(例1)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、カメラ部1−Cから取得した上記情報に基づいて、図21に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。例えば、図21は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定1の「周辺に障害物があるか?」の条件に合致した場合を示している。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0096】
図22は、実施の形態3における記憶装置2−Aに記憶される判定テーブルの他の例(例2)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、条件内容に対応した危険の度合いを示す点数(危険度)を追加したものを、危険地区判定部2の判定結果とともに示している。危険度は、実施の形態1と同様に、例えば危険性が大きい場合を10、危険性が小さい場合を1とし、その間にレベル2〜9を割り付ける。
【0097】
危険地区判定部2は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間に合致する条件内容に対応付けられた危険度が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
【0098】
図22の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定3の「道幅は狭いか?」の条件と判定4の「交差点を走行中か?」の条件に合致している。この場合には、判定3の条件に対応する危険度“5”と判定4の条件に対応する危険度“4”との和である“9”が閾値“8”以上であるので、「危険地区」であると判定される。
【0099】
図23は、実施の形態3における記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、障害物と自車との距離及び道幅に関する追加条件と、条件内容に対応した危険度を、危険地区判定部2の判定結果とともに示している。
図22に示した判定テーブルでは、一定の道幅(例えば10m)を基準として「道幅は狭いか?」という条件内容に危険度“5”を付与していたが、上記一定幅以内の道路であっても、道路脇の歩行者との距離を十分にあけられる道幅である場合には、当該危険度は過剰である。
そこで、図23に示すように「道幅は狭いか?」という条件内容においても、追加条件として、道路脇の歩行者との距離を十分にあけられる「5m〜10m」であれば、危険度を“3”とし、道路脇の歩行者との距離が近い状態での走行が予想される「5m以内」では、危険度を“6”とする。
【0100】
なお、図23の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定1の「周辺に障害物があるか?」の条件及びその追加条件「半径3m〜5m」に合致するとともに、判定3の「道幅が狭いか?」の条件及びその追加条件「5m〜10m」に合致している。この場合は、判定1の条件及び追加条件に対応する危険度“5”と判定3の条件及び追加条件に対応する危険度“3”との和である“8”が閾値“8”以上であるので、「危険地区」であると判定される。
【0101】
また、自車の走行区間を危険地区と判定する条件内容には、以下の例が挙げられる。
先ず、カメラ部1−Cで検知された障害物と自車の距離が近い場合(障害物を検知したカメラ部1−Cのカメラを中心とした半径が所定距離の範囲内)や、障害物が複数存在する場合、障害物と自車との距離が時間経過に伴って近付いている場合には、自車の走行区間を危険地区と判定してもよい。
【0102】
走行道路情報から、道幅が狭い場合や、自車が交差点又はカーブを走行する場合、右左折を行う場合は、危険地区を走行中と判定する。
高速道路では危険地区を走行中でないと判定し、サービスエリアでは危険地区を走行中であると判定してもよい。
自車の走行道路の制限速度が低い場合は、住宅街等の歩行者が多い地区である可能性が高いので、制限速度が任意の閾値以下であれば、自車が危険地区を走行中であると判定してもよい。
【0103】
標識情報から、周辺に小学校や商店街等の施設が存在すると判断した場合は、子供の飛び出しや周囲に歩行者が多い等の危険性が高いので、危険地区を走行中であると判定してもよい。
【0104】
時間帯の情報を用いる場合は、警告音停止状態による走行が危険な時間帯を走行時には危険地区を走行中であると判定してもよい。例えば、周囲の騒音が大きくなる時間帯は、車両の走行音が聞こえにくくなるため、危険地区を走行中と判定する。
また、周囲が暗くなる時間帯は、運転手の視野角が狭まるため、危険地区を走行中と判定してもよい。この場合、ライトの点灯があれば、視覚的に周囲が車両に気付きやすいため、危険地区を走行中でないと判定してもよい。
【0105】
周辺施設情報と現在時刻情報とを組み合わせて、危険地区であるかどうかを判定してもよい。例えば、商店街が周辺に存在したとしても、店舗が閉店すると人通りが少なくなるため、現在時刻情報と組み合わせて、開店時間中は危険地区と判定し、閉店時間以降は危険地区でないと判定してもよい。
【0106】
天候情報を判定に用いてもよい。例えば、雨が降っている場合は、走行音が雨によってさらに聞こえにくくなる可能性がある。そのため、雨を検知した場合もしくは任意の閾値以上の雨量を認識した場合は、危険地区を走行中であると判定してもよい。
【0107】
安全地区から危険地区へ判定される条件と、危険地区から安全地区へ判定される条件とが同じ場合に、危険地区と安全地区の境界を走行中に、不必要に判定結果が頻繁に変わる可能性がある。これについては、危険地区から安全地区へと判定を更新する場合に、一度の判定結果で危険地区と判定するのではなく、複数回にわたって連続して危険地区と判定されたときに、安全地区から危険地区に更新するようにしてもよい。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
【0108】
また、実施の形態3において、警告音オフ制御禁止装置3の構成は、上記実施の形態1で示した図8の構成と同様である。スイッチ4、車外スピーカ6、車内スピーカ7及び表示装置8の構成や機能についても、上記実施の形態1で説明した内容と同様である。さらに、警告音発生装置5の構成は、上記実施の形態1で示した図9又は図10の構成と同様である。
以降の説明において、実施の形態3における車外への音発生装置の構成については、図20に加え、図8〜10を参照する。
【0109】
次に動作について説明する。
図24は、実施の形態3の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、カメラ部1−Cが、車両周辺の障害物情報を取得し(ステップST3−1a)、標識情報を取得する(ステップST3−1b)。
さらに、カメラ部1−Cは、走行道路情報、天候又は時間帯の少なくとも一方の情報を取得する(ステップST3−1c、ステップST3−1d)。これらの情報は、カメラ部1−Cから危険地区判定部2へ出力される。
【0110】
危険地区判定部2は、カメラ部1−Cから入力した情報と、記憶装置2−Aから読み出した所定の判定条件とに基づいて、自車両が走行する道路区間の危険度を調べ、出力ゲイン値判定部5eへ出力する。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST3−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
【0111】
また、危険地区判定部2は、カメラ部1−Cで取得された情報の危険の度合いを点数にして、各情報の点数もしくは複数の情報の点数の総和に応じて危険度を決定してもよい。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
【0112】
上述の説明では、警告音発生装置5が、出力ゲイン値判定部5eを備える場合を示したが、図9に示すように、出力ゲイン値判定部5eを有さない構成の場合には、警告音の出力音量の変更処理(ステップST3−2)は省略される。
【0113】
次に、危険地区判定部2は、カメラ部1−Cで取得した情報に基づいて記憶装置2−Aから読み出した所定の判定条件を参照して危険度を決定し、この危険度を示す情報に基づいて、自車が走行中の区間が危険地区であるか否かを判定する(ステップST3−3)。
ここで、危険地区であると判定すると(ステップST3−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST3−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
【0114】
以降、ステップST3−4からステップST3−11までの処理は、上記実施の形態1で図11を用いて説明したステップST1−4からステップST1−11までの処理と同様である。また、実施の形態3の車外への音発生装置が、図24の処理を実行している間に、車両のキースイッチがオフされると、上記実施の形態1で説明した図12のシステム終了の割り込みが発生する。さらに、スイッチ4で警告音の発生をオフ制御する操作のみ行える場合における図13の割り込み処理と、スイッチ4で警告音の発生をオフ制御する操作とオン制御する操作の双方が行える場合における図14の割り込み処理は、実施の形態3の構成においても適用することができる。
【0115】
以上のように、この実施の形態3によれば、危険地区を走行する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部であるカメラ部1−Cとを備え、カメラ部1−Cで取得された障害物の有無や、障害物と車両の距離情報、標識情報、走行道路情報、天候や時間帯等のリアルタイムな情報と、記憶装置2−Aから読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、外部から警告音の出力停止を指示するスイッチ4の操作がなされても、車両が危険地区を走行していると判定されていると、警告音の出力を停止しない。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、カメラ部1−Cとしては、車両に予め搭載されたドライブレコーダやリアカメラ等のカメラを利用することが可能である。
【0116】
実施の形態4.
図25は、この発明の実施の形態4による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図25において、実施の形態4における車外への音発生装置は、上記実施の形態1で説明した図2の構成におけるナビゲーション装置1−Aの代わりに、車載装置1−Dを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
【0117】
車載装置1−Dは、車速信号を検知する車速センサ、後退ギアが入ったことを示すバック信号や、ライト、ウィンカー及びワイパーが操作されたことを示す操作信号を取得する機器、及びETC(Electronic Toll Collection)(登録商標;以下記載を省略する)や光ビーコン等の路車間通信装置を含む車載に備え付けられた機器である。車載装置1−Dで取得された情報は、危険地区判定部2に通知される。
【0118】
なお、車載装置1−Dが危険地区判定部2へ情報を通知するタイミングは、危険地区判定部2が常に車載装置1−Dを監視するのではなく、任意の一定時間ごともしくは任意の一定距離の走行ごとに、危険地区判定部2が車載装置1−Dから情報を収集するようにしてもよい。この任意の時間及び走行距離は、車両の内又は外の少なくとも一方の環境変化に応じて動的に変化させても構わない。この環境変化とは、時間帯、車速度、天候等の変化が挙げられる。例えば、車速が一定速度より遅い場合は、一定時間及び走行距離を短くすることにより情報取得の回数を多くし、車速が一定速度より速い場合には一定時間及び走行距離を長くすることで情報取得の回数を少なくしても良い。また、一定時間及び走行距離を設定することができるスイッチ等の機構を設け、ユーザの操作によって変化させても良い。このように動的に情報を取得するタイミングを変化させることにより、効率の良い処理を行うことができる。
【0119】
低速走行時のみに警告音を発生させる場合、危険地区判定部2が、車載装置1−Dから車速信号のみを常に収集して、所定の車速範囲内では、上記危険地区判定に用いる情報のうち、車速信号の他の情報も取得し、上記所定の車速範囲外(高速走行時)においては、車速信号以外を取得しないようにしてもよい。また、常に収集する情報は、自車の走行速度を把握できる情報であれば、車速信号以外であってもよい。
【0120】
危険地区判定部2は、車載装置1−Dから取得した情報を用いて、走行中の区間の危険の度合いを調べ、ユーザが任意に警告音をオフしてしまうと危険である危険地区かどうかを判定する。危険地区と判定した場合、危険地区判定部2は、走行区間が危険地区であることを警告音オフ制御禁止装置3へ通知する。
【0121】
図26は、実施の形態4における記憶装置2−Aに記憶される判定テーブルの一例(例1)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、車載装置1−Dから取得した車速情報、ライト点灯の有無、ウィンカーの作動の有無、ワイパーの作動の有無、バック走行するか否かを示す情報等に基づいて、図26に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。例えば、図26は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が判定1の「低速(任意の閾値以下)走行をしているか?」の条件に合致した場合を示している。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0122】
図27は、実施の形態4における記憶装置2−Aに記憶される判定テーブルの他の例(例2)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、条件内容に対応した危険の度合いを示す点数(危険度)を追加したものを、危険地区判定部2の判定結果とともに示している。危険度は、実施の形態1と同様に、例えば危険性が大きい場合を10、危険性が小さい場合を1とし、その間にレベル2〜9を割り付ける。
【0123】
危険地区判定部2は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間に合致する条件内容に対応付けられた危険度が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
【0124】
図27の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定2の「ライトを点灯しているか?」の条件と判定3の「ウィンカーは作動しているか?」の条件に合致している。この場合には、判定2の条件に対応する危険度“4”と判定3の条件に対応する危険度“4”との和である“8”が閾値“8”以上であるので、「危険地区」であると判定される。
【0125】
図28は、実施の形態4における記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、車速に関する追加条件と、条件内容に対応した危険度を、危険地区判定部2の判定結果とともに示している。
図27に示した判定テーブルでは、任意の閾値(例えば、時速30km)を基準として「低速走行をしているか?」という条件内容に危険度“8”を付与していたが、上記閾値以下の車速であっても、歩行者に自車の存在を認知させる場面が少ないことが予想されるある程度速い車速範囲である場合には、当該危険度は過剰である。
そこで、図28に示すように「低速走行をしているか?」という条件内容においても、追加条件として、歩行者に自車の存在を認知させる場面が少ないことが予想される「時速20〜30km」であれば、危険度を“4”とし、歩行者に自車の存在を認知させる場面が多いことが予想される「時速20km以内」では、危険度を“9”とする。
【0126】
なお、図28の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定1の「低速走行をしているか?」の条件及びその追加条件「時速20〜30km」に合致するとともに、判定4の「ワイパーは作動しているか?」の条件に合致している。この場合は、判定1の条件及び追加条件に対応する危険度“4”と判定4の条件に対応する危険度“4”との和である“8”が閾値“8”以上であるので、「危険地区」であると判定される。
【0127】
また、自車の走行区間を危険地区と判定する条件内容には、以下の例が挙げられる。
電気自動車は、低速走行時の騒音が非常に小さく周囲に認知されにくい。
そこで、車速信号から得られる走行速度情報を用いて、走行速度が任意の閾値よりも小さい場合、危険地区を走行中であると判定する。
逆に、高速走行時は速度が出ている分、危険度が増すので、走行速度が任意の閾値以上である場合に危険地区を走行中であると判定してもよい。
【0128】
後方進行時は、前方進行時よりも運転手の視野が狭まり、大変危険である。
そこで、バック信号から得られる車両の後方進行時は、危険地区を走行中であると判定してもよい。
【0129】
ライトの操作信号からライト点灯の有無を示す情報が得られる。
ライトが点灯されている場合、視覚的に周囲が車両に気付きやすいため、危険地区を走行中でないと判定してもよい。
逆に、ライトが点灯されているときは、車両周辺が暗く、運転手は障害物の認知が難しくなるため、危険地区を走行中と判定してもよい。
【0130】
ウィンカーの操作信号から、車両の左折又は右折を示す情報が得られる。
左折又は右折時は、死角が多く、警告音がない状態の走行は大変危険である。
そこで、ウィンカーの操作信号によって車両の左折又は右折が認知された場合は、危険地区を走行中であると判定してもよい。
また、ウィンカーの操作信号からは車線変更の情報も得られる。
車線変更時は、周囲の他の車両に自車両の存在に気付いてもらう必要があるので、危険地区を走行中であると判定してもよい。
【0131】
ワイパーの操作信号から、車外で雨が降っているか否かの情報が得られる。
雨が降っている場合、雨によって走行音がさらに聞こえにくくなる可能性がある。
そこで、ワイパーの作動時には、危険地区を走行中であると判定してもよい。
また、ワイパーの速度にあわせて危険地区を走行中か否かを判定してもよい。
【0132】
ETCや光ビーコンを含む路車間通信機器からは、高速道路か一般道路かといった自車が走行中の道路の種類が得られる。
この場合、高速道路では、歩行者はいないため危険地区を走行中でないと判定する。
しかし、サービスエリア内は歩行者が存在するので危険地区を走行中であると判定してもよい。
【0133】
安全地区から危険地区へ判定される条件と、危険地区から安全地区へ判定される条件とが同じ場合に、危険地区と安全地区の境界を走行中に、不必要に判定結果が頻繁に変わる可能性がある。これについては、危険地区から安全地区へと判定を更新する場合に、一度の判定結果で危険地区と判定するのではなく、複数回にわたって連続して危険地区と判定されたときに、安全地区から危険地区に更新するようにしてもよい。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
【0134】
また、実施の形態4において、警告音オフ制御禁止装置3の構成は、上記実施の形態1で示した図8の構成と同様である。スイッチ4、車外スピーカ6、車内スピーカ7及び表示装置8の構成や機能についても、上記実施の形態1で説明した内容と同様である。さらに、警告音発生装置5の構成は、上記実施の形態1で示した図9又は図10の構成と同様である。
以降の説明において、実施の形態4における車外への音発生装置の構成については、図25に加え、図8〜10を参照する。
【0135】
次に動作について説明する。
図29は、実施の形態4の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、車載装置1−Dが、車速信号を取得し(ステップST4−1a)、バック信号を取得する(ステップST4−1b)。
さらに、車載装置1−Dは、ライト情報、ウィンカー情報、ワイパー情報、及び路車間通信情報を取得する(ステップST4−1c、ステップST4−1d、ステップST4−1e、ステップST4−1f)。これらの情報は、車載装置1−Dから危険地区判定部2へ出力される。
【0136】
危険地区判定部2は、車載装置1−Dから入力した情報と、記憶装置2−Aから読み出した所定の判定条件とに基づいて、自車両が走行する道路区間の危険度を調べ、出力ゲイン値判定部5eへ出力する。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST4−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
【0137】
また、危険地区判定部2は、車載装置1−Dで取得された情報の危険の度合いを点数にして、各情報の点数もしくは複数の情報の点数の総和に応じて危険度を決定してもよい。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
【0138】
上述の説明では、警告音発生装置5が、出力ゲイン値判定部5eを備える場合を示したが、図9に示すように、出力ゲイン値判定部5eを有さない構成の場合には、警告音の出力音量の変更処理(ステップST4−2)は省略される。
【0139】
次に、危険地区判定部2は、車載装置1−Dで取得した情報に基づいて記憶装置2−Aから読み出した所定の判定条件を参照して危険度を決定し、この危険度を示す情報に基づいて、自車が走行中の区間が危険地区であるか否かを判定する(ステップST4−3)。
ここで、危険地区であると判定すると(ステップST4−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST4−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
【0140】
以降、ステップST4−4からステップST4−11までの処理は、上記実施の形態1で図11を用いて説明したステップST1−4からステップST1−11までの処理と同様である。また、実施の形態4の車外への音発生装置が、図29の処理を実行している間に、車両のキースイッチがオフされると、上記実施の形態1で説明した図12のシステム終了の割り込みが発生する。さらに、スイッチ4で警告音の発生をオフ制御する操作のみ行える場合における図13の割り込み処理と、スイッチ4で警告音の発生をオフ制御する操作とオン制御する操作の双方が行える場合における図14の割り込み処理は、実施の形態4の構成においても適用することができる。
【0141】
以上のように、この実施の形態4によれば、危険地区を走行する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部である車載装置1−Dとを備え、車載装置1−Dで取得された情報と、記憶装置2−Aから読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、外部から警告音の出力停止を指示するスイッチ4の操作がなされても、車両が危険地区を走行していると判定されていると、警告音の出力を停止しない。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
また、車載装置1−Dとしては、車両に予め搭載された車速信号を検知する車速センサ、後退ギアが入ったことを示すバック信号や、ライト、ウィンカー及びワイパーが操作されたことを示す操作信号を取得する機器、及び路車間通信装置を利用することが可能である。
【0142】
実施の形態5.
図30は、この発明の実施の形態5による車外への音発生装置を適用したシステムの全体構成を示すブロック図である。図30において、実施の形態5における車外への音発生装置は、危険地区判定情報取得装置として、上記実施の形態1で説明したナビゲーション装置1−A、上記実施の形態2で説明したセンサ部1−B、上記実施の形態3で説明したカメラ部1−C、及び上記実施の形態4で説明した車載装置1−Dを備える。また、図1及び図2と同一構成又はこれに相当する構成には、同一符号を付して説明を省略する。
【0143】
実施の形態5における上記危険地区判定情報取得装置は、上記実施の形態1〜4と同様の動作によって、現在時刻情報、現在位置情報、走行道路情報(道幅、一般又は高速道路等の道路の種類、制限速度、交差点、カーブ等)、事故多発地区情報、周辺施設情報、車両周辺の障害物の有無や、障害物と車両の距離情報等を取得し、危険地区判定部2に通知する。
【0144】
なお、上記危険地区判定情報取得装置が危険地区判定部2へ情報を通知するタイミングは、危険地区判定部2が常に上記危険地区判定情報取得装置を監視するのではなく、任意の一定時間ごともしくは任意の一定距離の走行ごとに、危険地区判定部2が上記危険地区判定情報取得装置から情報を収集するようにしてもよい。この任意の時間及び走行距離は、車両の内又は外の少なくとも一方の環境変化に応じて動的に変化させても構わない。この環境変化とは、時間帯、車速度、天候、走行区間の周辺施設等の変化が挙げられる。例えば、時間帯が8時から20時までの間は、一定時間及び走行距離を短くすることにより情報取得の回数を多くし、時間帯が20時から8時までの間は、一定時間及び走行距離を長くすることで情報取得の回数を少なくしても良い。また、一定時間及び走行距離を設定することができるスイッチ等の機構を設けて、ユーザの操作によって変化させても良い。このように動的に情報を取得するタイミングを変化させることにより、効率の良い処理を行うことができる。
【0145】
低速走行時のみに警告音を発生させる場合、危険地区判定部2が、上記危険地区判定情報取得装置から車速情報のみを常に収集して、所定の車速範囲内では、上記危険地区判定に用いる情報のうち、車速情報の他の情報も取得し、上記所定の車速範囲外(高速走行時)においては、車速情報以外を取得しないようにしてもよい。また、常に収集する情報は、自車の走行速度を把握できる情報であれば、車速情報以外であってもよい。
【0146】
危険地区判定部2は、実施の形態5の危険地区判定情報取得装置から取得した情報を用いて、走行中の区間の危険の度合いを調べ、ユーザが任意に警告音をオフしてしまうと危険である危険地区かどうかを判定する。危険地区と判定した場合、危険地区判定部2は、走行区間が危険地区であることを警告音オフ制御禁止装置3へ通知する。
【0147】
図31は、実施の形態5における記憶装置2−Aに記憶される判定テーブルの一例(例1)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、実施の形態5の危険地区判定情報取得装置から取得した情報に基づいて、図31に示す判定テーブルの条件内容が自車の走行区間に対して成り立つか否かで、危険地区を判定する。
例えば、図31は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が、センサ部1−Bで取得された情報によって判定11の「周辺に歩行者がいるか?」の条件に合致し、カメラ部1−Cで取得された情報によって判定21の「周辺に障害物があるか?」の条件に合致した場合を示している。つまり、センサ部1−Bで検出された歩行者が、カメラ部1−Cで障害物として検出されている。
このように判定テーブルのいずれかの条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0148】
図32は、実施の形態5における記憶装置2−Aに記憶される判定テーブルの他の例(例2)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、自車の走行時間に関する条件を追加したものを、危険地区判定部2の判定結果とともに示している。
危険地区判定部2は、実施の形態5の危険地区判定情報取得装置から取得した上記情報に基づいて、図32に示す判定テーブルの条件内容が追加条件とともに自車の走行区間に対して成り立つか否かで危険地区を判定する。
【0149】
図32の例では、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間が、ナビゲーション装置1−Aで取得された情報によって判定02の「周辺に小学校があるか?」の条件に合致し、かつ追加条件の「登下校時間中」にも合致しており、カメラ部1−Cで取得された情報によって判定22の「スクールゾーンを走行中か?」の条件に合致し、かつ追加条件の「登下校時間中」にも合致した場合を示している。このように判定テーブルのいずれかの条件及び追加条件が成り立つ場合に、自車の走行区間を危険地区と判定する。
【0150】
図33は、実施の形態5における記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、条件内容に対応した危険の度合いを示す点数(危険度)を追加したものを、危険地区判定部2の判定結果とともに示している。危険度は、実施の形態1と同様に、例えば危険性が大きい場合を10、危険性が小さい場合を1とし、その間にレベル2〜9を割り付ける。
【0151】
危険地区判定部2は、判定条件を識別する番号順に条件の内容を判定していき、自車の走行区間に合致する条件内容に対応付けられた危険度が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
また、自車の走行区間が複数の条件内容に合致する場合には、これらの条件内容に対応する各危険度の総和が所定の閾値以上になると、危険地区であると判定し、所定の閾値未満であると危険地区ではないと判定する。
【0152】
図33の例では、危険度に関する閾値が“8”であり、自車の走行区間が、ナビゲーション装置1−Aで取得された情報によって判定05の「制限速度が時速20km以下か?」という条件に合致し、車載装置1−Dで取得された情報によって判定31の「低速走行をしているか?」の条件に合致している。この場合には、判定05の条件に対応する危険度“3”と判定31の条件に対応する危険度“8”との和である“11”が閾値“8”以上であるので、「危険地区」であると判定される。
【0153】
図34は、実施の形態5における記憶装置2−Aに記憶される判定テーブルの他の例(例3)を示す図であり、自車の走行区間を危険地区と判定する条件をまとめた判定テーブルに対して、走行時間帯、障害物と自車との距離、道幅、及び車速に関する追加条件と、条件内容に対応した危険度を、危険地区判定部2の判定結果とともに示している。
図33に示した判定テーブルでは、任意の閾値(例えば、時速30km)を基準として「低速走行をしているか?」という条件内容に危険度“8”を付与していたが、上記閾値以下の車速であっても、歩行者に自車の存在を認知させる場面が少ないことが予想されるある程度速い車速範囲である場合には、当該危険度は過剰である。
そこで、図34に示すように「低速走行をしているか?」という条件内容においても、追加条件として、歩行者に自車の存在を認知させる場面が少ないことが予想される「時速20〜30km」であれば、危険度を“4”とし、歩行者に自車の存在を認知させる場面が多いことが予想される「時速20km以内」では、危険度を“9”とする。
【0154】
なお、図34の例では、危険度に関する閾値が“8”であり、自車の走行区間が、判定2の「周辺に小学校があるか?」の条件及び追加条件「登下校時間外」に合致しており、さらに判定22の「スクールゾーンを走行中か?」の条件及び追加条件「登下校時間外」に合致し、判定31の「低速走行をしているか?」の条件及び追加条件「時速20〜30km」に合致している。この場合は、判定2の条件及び追加条件に対応する危険度“3”と判定22の条件及び追加条件に対応する危険度“3”と判定31の条件及び追加条件に対応する危険度“4”との和である“10”が閾値“8”以上であるので、「危険地区」であると判定される。
【0155】
安全地区から危険地区へ判定される条件と、危険地区から安全地区へ判定される条件とが同じ場合に、危険地区と安全地区の境界を走行中に、不必要に判定結果が頻繁に変わる可能性がある。これについては、危険地区から安全地区へと判定を更新する場合に、一度の判定結果で危険地区と判定するのではなく、複数回にわたって連続して危険地区と判定されたときに、安全地区から危険地区に更新するようにしてもよい。
また、上記実施の形態1で図7を用いて説明したように、安全地区の判定に使用する危険度の閾値と危険地区の判定に使用する危険度の閾値とに差を持たせても構わない。
【0156】
また、実施の形態5において、警告音オフ制御禁止装置3の構成は、上記実施の形態1で示した図8の構成と同様である。スイッチ4、車外スピーカ6、車内スピーカ7及び表示装置8の構成や機能についても、上記実施の形態1で説明した内容と同様である。さらに、警告音発生装置5の構成は、上記実施の形態1で示した図9又は図10の構成と同様である。
以降の説明において、実施の形態5における車外への音発生装置の構成については、図30に加え、図8〜10を参照する。
【0157】
次に動作について説明する。
図35は、実施の形態5の車外への音発生装置による動作の流れを示すフローチャートであり、自車の走行地区の危険度に応じた警告音のオフ制御禁止の判定を含む警告音発生処理の詳細を示している。
先ず、車両のキースイッチがオンされると、ナビゲーション装置1−Aは、GPS受信機によって現在時刻情報を取得し、現在位置情報を取得し、走行道路情報、事故多発地区情報、周辺施設情報を取得する(ステップST5−1a)。
また、センサ部1−Bが、車両の周辺の歩行者や、軽車両・バイク、他車両等の障害物を検知し、当該障害物の種類を示す情報と、当該障害物と車両との間における距離情報を取得する(ステップST5−1b)。
カメラ部1−Cが、車両周辺の障害物情報を取得し、標識情報を取得し、走行道路情報、天候又は時間帯の少なくとも一方の情報を取得する(ステップST5−1c)。
車載装置1−Dが、車速信号を取得し、バック信号を取得し、ライト情報、ウィンカー情報、ワイパー情報、及び路車間通信情報を取得する(ステップST5−1d)。
これらの情報は、実施の形態5の危険地区判定情報取得装置からの危険地区判定情報として、ナビゲーション装置1−A、センサ部1−B、カメラ部1−C及び車載装置1−Dから危険地区判定部2へ出力される。
【0158】
危険地区判定部2は、実施の形態5の危険地区判定情報取得装置から入力した情報と、記憶装置2−Aから読み出した所定の判定条件とに基づいて、自車両が走行する道路区間の危険度を調べ、出力ゲイン値判定部5eへ出力する。
出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度に応じて警告音を出力するゲイン値を決定し、スピーカ出力処理部5dに設定する。これにより、スピーカ出力処理部5dは、出力ゲイン値判定部5eによって設定された出力ゲイン値に応じて警告音の出力音量を変更する(ステップST5−2)。
例えば、出力ゲイン値判定部5eは、危険地区判定部2から入力した危険度が所定の閾値より大きければゲイン値を大きくし、危険度が所定の閾値より小さければゲイン値を小さく制御する。
なお、危険地区判定部2は、記憶装置2−Aに保持した危険地区と判定する条件が成り立った回数に応じて、出力ゲイン値判定部5eへ危険度を出力するようにしてもよい。
例えば、危険地区と判定する条件が成り立った回数が所定の閾値以上になったとき、危険度を出力ゲイン値判定部5eへ出力する。
【0159】
また、危険地区判定部2は、実施の形態5の危険地区判定情報取得装置で取得された情報の危険の度合いを点数にして、各情報の点数もしくは複数の情報の点数の総和に応じて危険度を決定してもよい。
例えば、危険の度合いを示す点数を、各センサが取得した障害物との距離が短くなるにつれて高くなるように付与する。
【0160】
上述の説明では、警告音発生装置5が、出力ゲイン値判定部5eを備える場合を示したが、図9に示すように、出力ゲイン値判定部5eを有さない構成の場合には、警告音の出力音量の変更処理(ステップST5−2)は省略される。
【0161】
次に、危険地区判定部2は、実施の形態5の危険地区判定情報取得装置で取得した情報に基づいて記憶装置2−Aから読み出した所定の判定条件を参照して危険度を決定し、この危険度を示す情報に基づいて、自車が走行中の区間が危険地区であるか否かを判定する(ステップST5−3)。
ここで、危険地区であると判定すると(ステップST5−3;YES)、危険地区判定部2は、危険地区である旨の判定結果を警告音オフ制御禁止装置3へ出力し、危険地区でないと判定した場合(ステップST5−3;NO)には、安全地区である旨の判定結果を警告音オフ制御禁止装置3へ出力する。
【0162】
以降、ステップST5−4からステップST5−11までの処理は、上記実施の形態1で図11を用いて説明したステップST1−4からステップST1−11までの処理と同様である。また、実施の形態5の車外への音発生装置が、図35の処理を実行している間に、車両のキースイッチがオフされると、上記実施の形態1で説明した図12のシステム終了の割り込みが発生する。さらに、スイッチ4で警告音の発生をオフ制御する操作のみ行える場合における図13の割り込み処理と、スイッチ4で警告音の発生をオフ制御する操作とオン制御する操作の双方が行える場合における図14の割り込み処理は、実施の形態5の構成においても適用することができる。
【0163】
以上のように、この実施の形態5によれば、危険地区を走行する車両の状況が記述された判定条件を記憶する記憶装置2−Aと、車両の状況を示す情報を取得する情報取得部である、ナビゲーション装置1−A、センサ部1−B、カメラ部1−C、車載装置1−Dとを備え、ナビゲーション装置1−A、センサ部1−B、カメラ部1−C、車載装置1−Dで取得された情報と、記憶装置2−Aから読み出した判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定し、外部から警告音の出力停止を指示するスイッチ4の操作がなされても、車両が危険地区を走行していると判定されていると、警告音の出力を停止しない。
このようにすることで、車両の状況から当該車両が危険地区を走行していると判定されていれば、ユーザによる任意な警告音の出力停止を禁止することができる。これにより、自車の走行を認識させるべき走行地区で確実に警告音を発生することが可能であり、当該地区での安全性を向上させることができる。
【0164】
この発明に係る車外への音発生装置は、車両が危険な区間を走行中であるか否かに応じて、使用者による警告音の停止の可否を制御することができることから、走行音の小さい電気自動車等の擬似走行音の発生装置に好適である。
【特許請求の範囲】
【請求項1】
車両に搭載され、車外に音を出力する車外への音発生装置であって、
車外への音を発生させる音発生部と、
走行地区を危険地区と判定する車両の状況が記述された判定条件を記憶する記憶部と、
前記車両の状況としてカーナビゲーション装置、センサ部、カメラ部により得られる情報、車速信号、バック信号、ライト情報、ウィンカー情報、ワイパー情報または路車間通信情報を取得する情報取得部と、
前記情報取得部によって取得された前記車両の状況を示す情報と、前記記憶部から読み出した前記判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定する判定部と、
前記音発生部の出力を制御するとともに、外部からの音の出力停止を指示する制御信号にかかわらず、前記判定部によって前記車両が危険地区を走行していると判定されている場合は、前記音発生部の出力を停止しない制御部とを備え、
前記判定は、前記情報取得部によって取得された車両の状況を示す情報に基づいて行われる車外への音発生装置。
【請求項2】
前記判定部は、所定の車速範囲内では上記危険地区判定に用いる情報のうち車速情報の他の情報も取得し、上記所定の車速範囲よりも高速走行時においては車速情報を把握できる情報以外を取得しないようにしたことを特徴とする請求項1記載の車外への音発生装置。
【請求項1】
車両に搭載され、車外に音を出力する車外への音発生装置であって、
車外への音を発生させる音発生部と、
走行地区を危険地区と判定する車両の状況が記述された判定条件を記憶する記憶部と、
前記車両の状況としてカーナビゲーション装置、センサ部、カメラ部により得られる情報、車速信号、バック信号、ライト情報、ウィンカー情報、ワイパー情報または路車間通信情報を取得する情報取得部と、
前記情報取得部によって取得された前記車両の状況を示す情報と、前記記憶部から読み出した前記判定条件とを比較して、当該車両が危険地区を走行しているか否かを判定する判定部と、
前記音発生部の出力を制御するとともに、外部からの音の出力停止を指示する制御信号にかかわらず、前記判定部によって前記車両が危険地区を走行していると判定されている場合は、前記音発生部の出力を停止しない制御部とを備え、
前記判定は、前記情報取得部によって取得された車両の状況を示す情報に基づいて行われる車外への音発生装置。
【請求項2】
前記判定部は、所定の車速範囲内では上記危険地区判定に用いる情報のうち車速情報の他の情報も取得し、上記所定の車速範囲よりも高速走行時においては車速情報を把握できる情報以外を取得しないようにしたことを特徴とする請求項1記載の車外への音発生装置。
【図1】


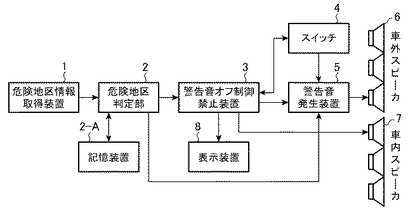
【図2】
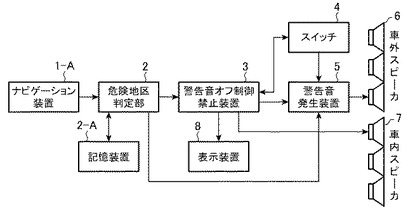
【図3】
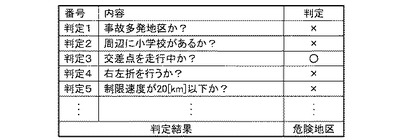
【図4】
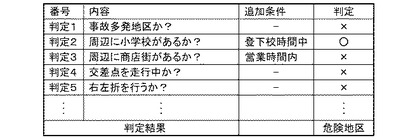
【図5】
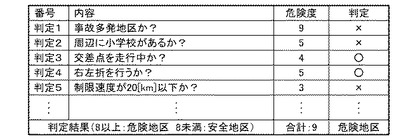
【図6】
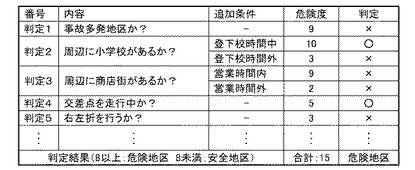
【図7】
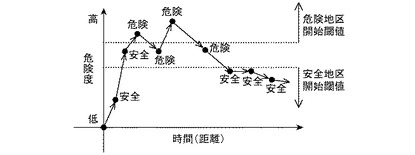
【図8】
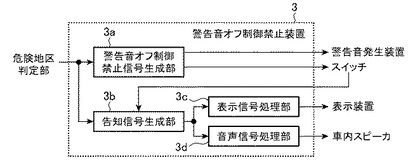
【図9】
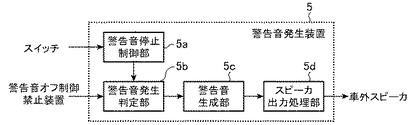
【図10】
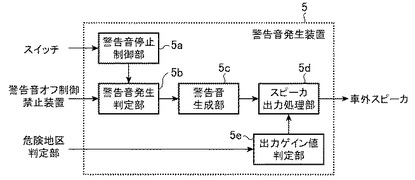
【図11】
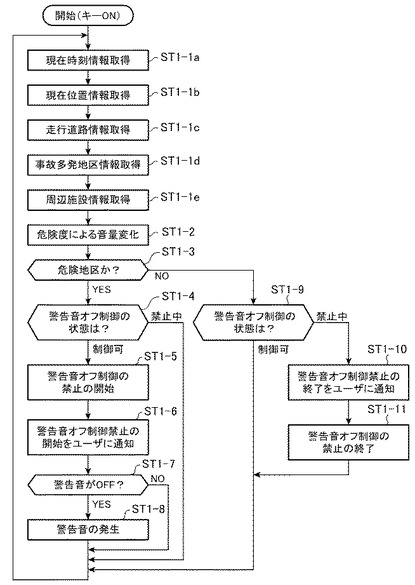
【図12】
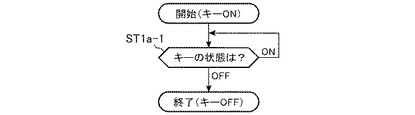
【図13】
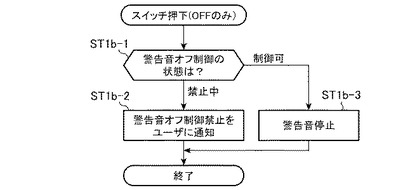
【図14】
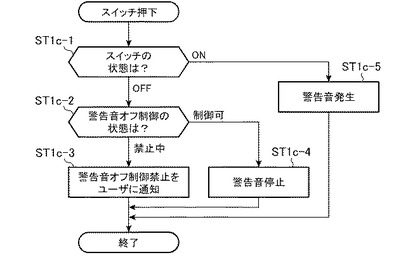
【図15】
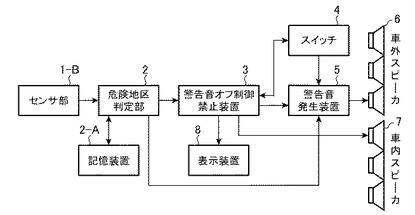
【図16】
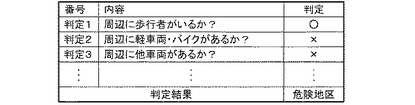
【図17】
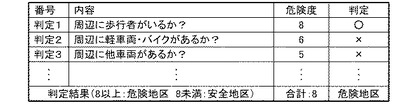
【図18】
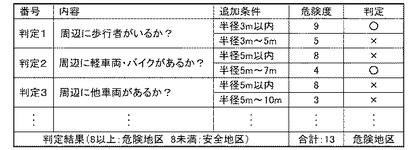
【図19】
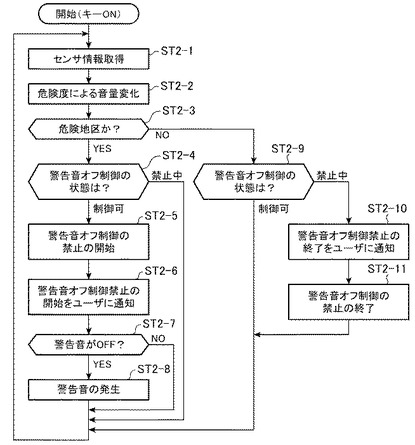
【図20】
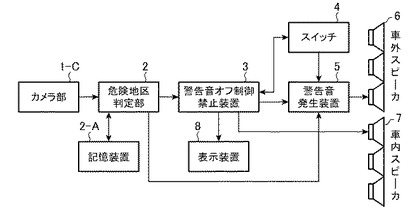
【図21】
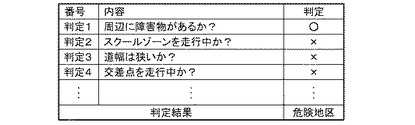
【図22】
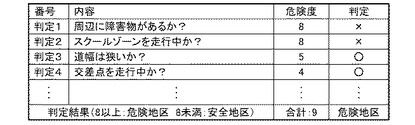
【図23】
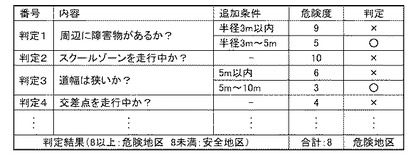
【図24】
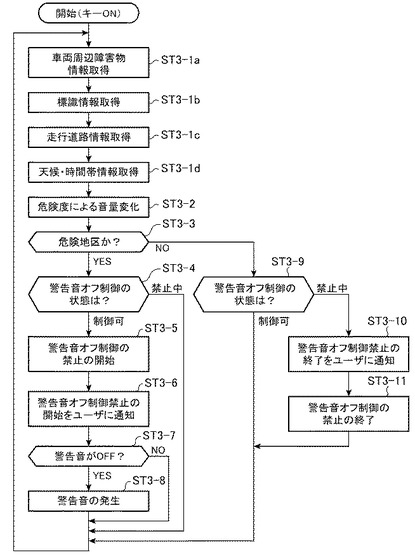
【図25】
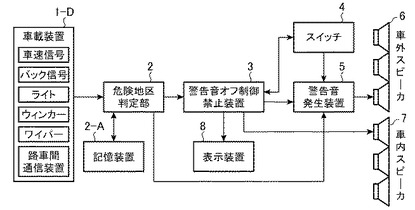
【図26】
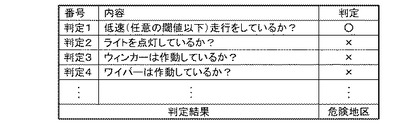
【図27】
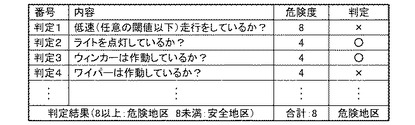
【図28】
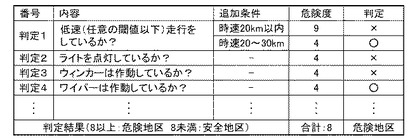
【図29】
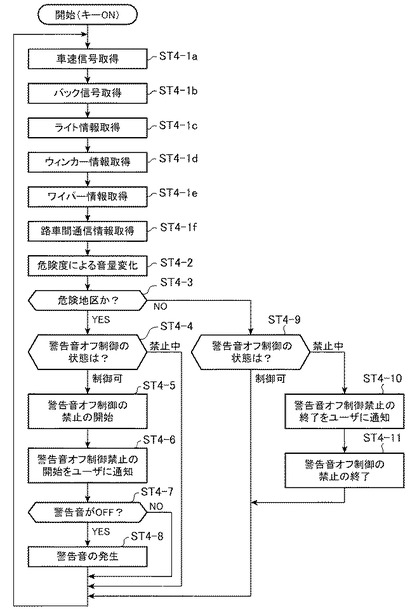
【図30】
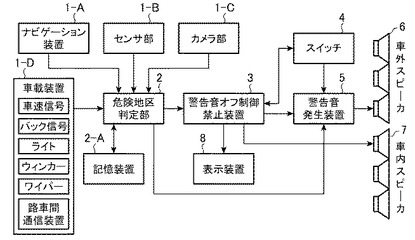
【図31】
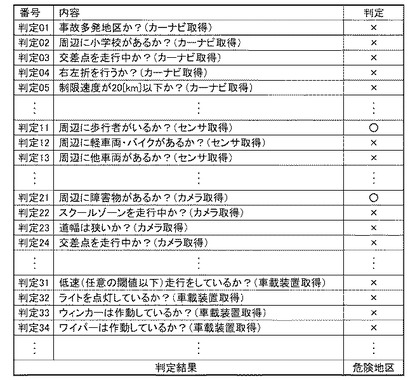
【図32】
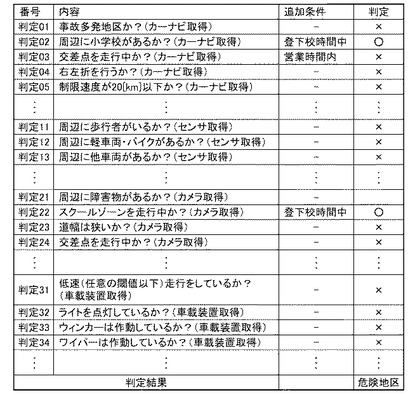
【図33】
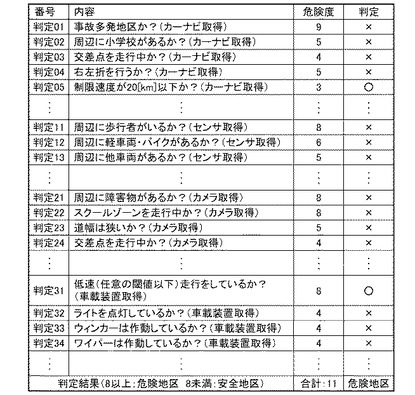
【図34】
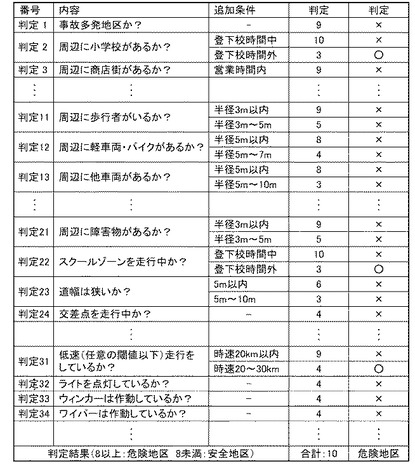
【図35】
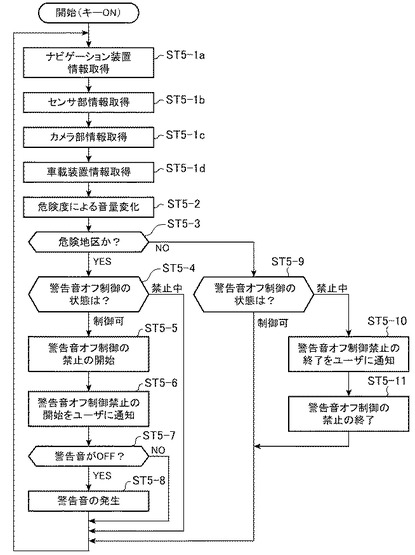
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【公開番号】特開2012−51567(P2012−51567A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2011−228965(P2011−228965)
【出願日】平成23年10月18日(2011.10.18)
【分割の表示】特願2011−29597(P2011−29597)の分割
【原出願日】平成22年5月26日(2010.5.26)
【特許番号】特許第4889823号(P4889823)
【特許公報発行日】平成24年3月7日(2012.3.7)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成23年10月18日(2011.10.18)
【分割の表示】特願2011−29597(P2011−29597)の分割
【原出願日】平成22年5月26日(2010.5.26)
【特許番号】特許第4889823号(P4889823)
【特許公報発行日】平成24年3月7日(2012.3.7)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]