
車外映像表示システム
【課題】運転操作によりどのように車両が挙動するのか、直感的に分かりづらいという困難点を解消することができる車外映像表示システムを提供することを目的とする。
【解決手段】車両とスマートフォンとからなるシステムであって、スマートフォンは、スマートフォン自身の姿勢を検出する端末姿勢検出手段と、情報を画面に表示する表示手段を持ち、車両は、車両自身の姿勢を検出する車両姿勢検出手段と、車外映像を撮影する車外映像撮影手段と、端末姿勢検出手段が検出した端末姿勢の変化量から前記表示手段に表示するべき車外映像の表示パラメータを決定する表示パラメータ決定手段と、車外映像撮影手段が撮影した映像を表示パラメータ決定手段が決定したパラメータにもとづいて合成する画像合成手段を備えることを特徴とする。
【解決手段】車両とスマートフォンとからなるシステムであって、スマートフォンは、スマートフォン自身の姿勢を検出する端末姿勢検出手段と、情報を画面に表示する表示手段を持ち、車両は、車両自身の姿勢を検出する車両姿勢検出手段と、車外映像を撮影する車外映像撮影手段と、端末姿勢検出手段が検出した端末姿勢の変化量から前記表示手段に表示するべき車外映像の表示パラメータを決定する表示パラメータ決定手段と、車外映像撮影手段が撮影した映像を表示パラメータ決定手段が決定したパラメータにもとづいて合成する画像合成手段を備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車内において、モバイル端末上で車外の映像を表示するアプリケーションに対して簡便に表示・操作することのできるシステムに関するものである。
【背景技術】
【0002】
自動車の運転者から見えない死角部分を、カメラで撮像し、その映像を車内のナビゲーション装置などのディスプレイ上に表示する車載装置が広く存在するが、カメラが映すことのできる視野角には限界がある。このため、ボタンやタッチパネル操作を用いて視野の向きを変更できる装置が存在する(例えば特許文献1)。また、複数のカメラ映像を合成して、あたかも車両上方から見える映像のように広角の範囲を一度に表示し、カメラ向きを特定する必要をなくした装置も存在する(例えば特許文献2)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−311052号公報
【特許文献2】特開2007−292535号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1のような装置においては、運転者にとって直感的に視野の向きを特定することが困難であり、現在の視野が運転者からみてどの角度の映像であるかを把握するのが困難であった。
【0005】
また、特許文献2のような装置においては、画像合成の限界により画像に歪みが発生したり、運転者は上方からの映像を見ても普段の視野とは大きく異なるため、運転操作によりどのように車両が挙動するのか、直感的に分かりづらいという困難点を解消することができる車外映像表示システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の車外映像表示システムは、車両とスマートフォンとからなるシステムであって、前記スマートフォンは、スマートフォン自身の姿勢を検出する端末姿勢検出手段と、情報を画面に表示する表示手段を持ち、前記車両は、車両自身の姿勢を検出する車両姿勢検出手段と、車外映像を撮影する車外映像撮影手段と、前記端末姿勢検出手段が検出した端末姿勢の変化量から前記表示手段に表示するべき車外映像の表示パラメータを決定する表示パラメータ決定手段と、前記車外映像撮影手段が撮影した映像を前記表示パラメータ決定手段が決定したパラメータにもとづいて合成する画像合成手段を備えることを特徴とする。
【0007】
本発明の車外映像表示システムの前記表示パラメータ決定手段は、前記端末姿勢検出手段が検出した端末姿勢と前記車両姿勢検出手段が検出した車両姿勢とから決定することを特徴とする。
【0008】
本発明の車外映像表示システムの前記端末姿勢検出手段および前記車両姿勢検出手段は、左右方向の回転角度を検出又は左右および上下方向の回転角度を検出し、前記表示パラメータ決定手段は、左右方向の回転角度を検出したときは車両に対する端末の左右方向の相対的な回転角を算出し、左右および上下方向の回転角度を検出したときには、車両に対する端末の左右および上下方向の相対的な回転角を算出して表示パラメータを決定するこ
とを特徴とする。
【0009】
本発明の車外映像表示システムの前記端末姿勢検出手段は、左右方向の回転角度を検出し又は左右および上下方向の回転角度を検出し、前記表示パラメータ決定手段は、左右方向の回転角度を検出するときは初期状態からの端末の左右方向の相対的な回転角を算出し、左右および上下方向の回転角度を検出したときは初期状態からの端末の左右および上下方向の相対的な回転角を算出し、これに基づいて表示パラメータを決定することを特徴とする。
【0010】
本発明の車外映像表示システムの前記車両および前記端末は、無線の通信手段又は有線の通信手段によって通信することが可能であることを特徴とする。
【0011】
本発明の車外映像表示システムの前記スマートフォンは、更にユーザの操作を検出する操作部を備え、前記操作部が検出した操作に応じて映像の表示方法を前記表示パラメータ決定手段で決定することを特徴とする。
【0012】
本発明の車外映像表示システムの前記車両は、端末の回転角に応じて表示パラメータの変化量の係数を定める変化量設定手段を更に備えることを特徴とする。
【発明の効果】
【0013】
本発明のシステムによれば、スマートフォンを「窓枠」または「鏡」に喩える形で、非常に直感的に視野の向きを調節することができる。このため、運転者はどこの映像を表示しているかを直感的に理解することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態1のシステム構成を示すブロック図
【図2】(a)スマートフォンの画面を正面にみたときを示す模式図(b)スマートフォンを傾けたとき示す模式図
【図3】(a)車両およびスマートフォンを上方から見た平面図(b)車両及びスマートフォンを側方から見た立面図
【図4】実施の形態1における車両の主たる動作を示すフロー図
【図5】本発明の実施の形態2のシステム構成を示すブロック図
【図6】実施の形態Bにおける車両の主たる動作を示すフロー図
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態に関わるシステムについて説明する。本発明の実施の形態に関わるシステムについては種々の設計状態が考えられるため、以下、実施の形態1、2として個々に記述することとする。
【0016】
(実施の形態1)
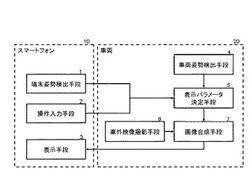
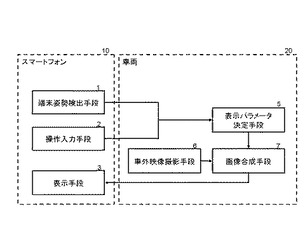
本発明に係わる実施の形態Aのシステム構成について、図1のブロック図を用いて説明する。
実施の形態1は、車両および端末の地磁気センサを用いてそれぞれの方位を求め、絶対的な位置関係を算出し、表示パラメータを決定する場合を想定している。このため、初期位置のリセットや回転角の調節などが必要でなくより正確な表示をすることができる。
図1において、スマートフォン10は、端末姿勢検出手段1、操作入力手段2、表示手段3を備えて構成されている。
【0017】
ここで、端末姿勢検出手段1は、加速度センサ、地磁気センサ、および処理部によって構成され、スマートフォン10の姿勢を検出することができるように構成されている。ま
た、検出されるパラメータについては後述する。
【0018】
操作入力手段2は、タッチパッド、各種スイッチなどのデバイスおよびその周辺の回路で構成され、実行中のアプリに対して運転者が命令を指示する際に用いられることができるように構成されている。ほぼ全てのスマートフォンにおいて、タッチパネルによって表示手段と操作手段が一体化して構成されている。
表示手段3は、液晶ディスプレイなどで構成され各種情報を表示するなどして運転者に情報を提示することができるように構成されている。
車両20は、車両姿勢検出手段4、表示パラメータ決定手段5、車外映像撮影手段6、画像合成手段7を備えて構成されている。
車両姿勢検出手段4は、加速度センサ、地磁気センサ、および処理部によって構成され、車両20の向いている方位を検出する。
【0019】
表示パラメータ決定手段5は、CPUとメモリによって構成され、車両姿勢検出手段4が検出した車両20の向きおよび端末姿勢検出手段1が検出したスマートフォン10の姿勢、更に操作入力手段2が検出する運転者の操作によって、スマートフォン10の表示手段3に表示するべき車外映像の表示パラメータを決定する。決定される表示パラメータおよび詳細な決定方法については後述する。
車外映像撮影手段6は単数または複数のカメラによって構成され、主に運転者にとって死角となる部分を中心に車外の映像を撮影する。
【0020】
画像合成手段7は、CPU、メモリによって構成され、車外映像撮影手段より映像を入力し、表示パラメータ決定手段5が決定したパラメータに基づいて映像を視点変換し合成する。詳細な合成方法については後述する。
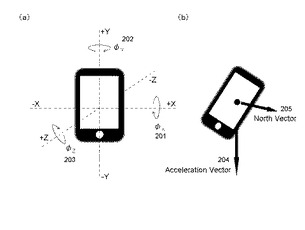
次に、図1における端末姿勢検出手段が検出するスマートフォン10の姿勢のパラメータについて、図2a、図2bを用いて説明する。なお、図2aは、スマートフォンの画面を正面にみたときを示す模式図であり、図2bは、スマートフォンを傾けたとき示す模式図である。
【0021】
図2aに示すように、スマートフォン10の画面を正面にみたときに短辺方向を+X、−X軸、長辺方向を+Y、−Y軸、画面に垂直な方向を+Z、−Z軸と定める。
【0022】
本実施形態におけるスマートフォン10は、3軸のジャイロセンサを備えており、それぞれの軸に沿った回転成分φX201、φY202、φZ203を検出する。
【0023】
更に、本実施形態におけるスマートフォン10は、2軸または3軸の加速度センサと地磁気センサを備えている。加速度センサは、図2bにおけるベクトル204のようにスマートフォン10が持っている現在の加速度ベクトルを検出することができる(静止状態では、その成分は重力加速度である)。また、地磁気センサはベクトル205のように北の方位を示す北方位ベクトルを検出することが可能である。
【0024】
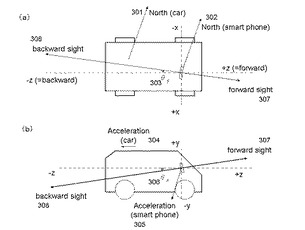
次に、図1における表示パラメータ決定手段が決定するスマートフォン10の表示手段に表示するべき車外映像の表示パラメータおよび決定方法について、図3a、3bを用いて説明する。なお、図3aは、車両およびスマートフォンを上方から見た平面図であり、図3bは、車両及びスマートフォンを側方から見た立面図である。
【0025】
(フルスペックバージョン)
図3aは、車両20およびスマートフォン10を上方から見た平面図、図3bは車両20及びスマートフォン10を側方から見た立面図である。車両20の進行方向を向いて左右に+x、−x軸、上下方向に+y、−y軸、前後方向に+z、−z軸を定める。
【0026】
本実施例における車両20は、地磁気センサを持っており図3aのベクトル301のように北の方位を示す北方位ベクトルを検出することが可能である。一方で、前述したようにスマートフォン10もベクトル302のように北方位ベクトルを検出する。両者を揃えることにより、水平平面上で車両20に対してスマートフォン10がどの方向を向いているかを検出することができる。具体的には、スマートフォン10が検出した北方位ベクトルのY軸方向回転角θNYから、車両20が検出した北方位ベクトルのy軸方向回転角θNyを差し引くことで車両20に対するスマートフォン10のy軸方向の回転角θy(303)を算出することができる。
【0027】
更に、本実施例における車両20は加速度センサを持っており、図3bのベクトル304のように車両20が持つ加速度を検出することが可能である。一方で、前述したようにスマートフォン10もベクトル305のように加速度ベクトルを検出する。スマートフォン10の加速度ベクトルから車両20の加速度ベクトルを差し引き、そのベクトルのx軸に対する回転角を求めることで車両20の対するスマートフォン10の傾きをx軸方向の回転角θx(306)として検出することができる。
【0028】
θx、θyを求めることにより、車両20とスマートフォン10の相対的な位置関係が求まるため、車両20に対してスマートフォン10が向いている方向の前景向きのベクトル307、および後景向きのベクトル308が求めることができる。
(簡易バージョン 車の加速度は無視する)
【0029】
なお、上記方法において、車両20がほぼ停止していると見なせる場合、車両20の加速度ベクトルは検出せずベクトル304はゼロと見なし、ベクトル305のみでθxを求めることもできる。これにより車両20の加速度センサは必要でなくなり、より簡便な装置構成および方法をとることが可能である。
【0030】
(簡易バージョン θyのみを使う)
また、上記方法において図3bに示したx軸方向の回転を無視し、θyのみを算出すればよいとする場合も考えられる。この場合、前景ベクトル307および後景ベクトル308はy軸方向の成分を持たない。表示される画面の上下方向の角度は一定となるが、これにより車両20の加速度センサおよびスマートフォン10の加速度センサは必要なくなり、より簡便な装置構成及び方法をとることが可能である。
次に、図1における画像合成手段の画像合成方法について説明する。なお、画像合成方法については既知の種々の方法を用いることができる。
【0031】
運転者に対して自動車周辺を撮影した画像を提示する技術としては、車両左右のバックミラーと車両後部中央との3カ所に設置した3つのカメラによって自動車後方を撮影した画像を1つの画像に合成して表示する技術が知られている(例えば、特開平10−257482 )。
【0032】
また、特開2007−158427のように複数のカメラを用いて、一つの仮想的な視点から自車後方を観察したようすをできるだけリアリティある形態で模擬する技術が存在している。
次に、図1における車両20の主たる動作について、図4のフロー図を用いて説明する。
【0033】
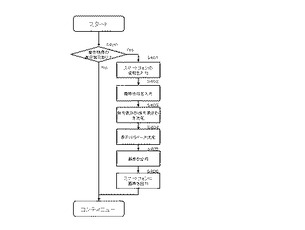
車両20は、起動し初期動作を終えると図4のフローを繰り返すループに入る。ループの最初のステップS400において、運転者より車外映像の表示指示があるかどうかを判定する。Noの場合は即座にループを抜ける。Yesの場合は、車両20はステップS4
01においてスマートフォン10よりスマートフォン10の姿勢に関する情報を入力する。スマートフォン10と車両20との通信方法については、USBなどの有線手段を介しても良いし、Wi−Fiなどの有線手段を介してもよい。次に、車両20はステップS402において車両20の方位を入力する。
【0034】
次に、車両20は前方を表示するか後方を表示するかを決定する。この方法については種々考えられる。一つは、運転者がタッチパネルなどの操作手段を介して前方表示か後方表示かを選択することができるようにする。例えば、画面をタップないしダブルタップすることによって前方表示か後方表示かを切り替えられるようにすればよい。別の方法については、車両20のシフトレバーの位置を参照する。例えば、バックに入っていれば運転者は後退しようとしていると見なされるので後方表示とし、それ以外の位置に入っていれば前方表示とする。更に別の方法については、スマートフォン10の傾きを見る。即ち、ステップS401で入力したスマートフォン10の姿勢には、図2で示したように、スマートフォン10の傾きがφxとして含まれており、この値が正、即ちスマートフォン10の画面を見るユーザの視線が水平線よりも上を見上げる角度に向いていれば後方表示とし、負、即ちその反対であれば前方表示とする。これは、車の死角が基本的にドライバの位置よりも下方にあるため、水平線よりも上の方向に必要な車外映像の情報はないと見なせるためである。
【0035】
次に、車両20は、ステップS404において表示パラメータを決定する。次に、車両20は、ステップS405において画像を合成する。次に、車両20はステップS406においてスマートフォン10に画像を出力してループを終える。
【0036】
(実施の形態2)
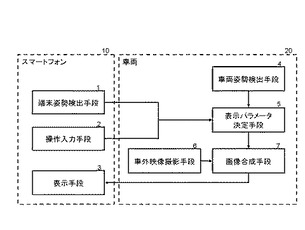
次に本発明に係わる実施の形態2のシステム構成について、図5のブロック図を用いて説明する。
【0037】
実施の形態2は、端末の初期状態とそこからの回転成分の差分のみを用いて表示パラメータを決定する場合を想定している。これにより、より簡便な方法で本発明の機能を実現することができる。
図5において、スマートフォン10は端末姿勢検出手段1、操作入力手段2、表示手段3を備えて構成されている。
【0038】
端末姿勢検出手段1は、加速度センサ、地磁気センサ、および処理部によって構成されスマートフォン10の姿勢を検出することができるように構成されている。検出されるパラメータについては、実施の形態Aと同様であるため省略する。
【0039】
操作入力手段2は、タッチパッド、各種スイッチなどのデバイスおよびその周辺の回路で構成され実行中のアプリに対して運転者が命令を指示する際に用いられる。ほぼ全てのスマートフォンにおいて、タッチパネルによって表示手段と操作手段が一体化している。
表示手段3は液晶ディスプレイなどで構成され、各種情報を表示するなどして運転者に情報を提示する。
車両20は、表示パラメータ決定手段5、車外映像撮影手段6、画像合成手段7を備えて構成されている。
【0040】
表示パラメータ決定手段5は、CPUとメモリによって構成され車両姿勢検出手段4が検出した車両20の向き、および端末姿勢検出手段1が検出したスマートフォン10の姿勢、更に操作入力手段2が検出する運転者の操作によって、スマートフォン10の表示手段3に表示するべき車外映像の表示パラメータを決定する。決定される表示パラメータおよび詳細な決定方法については後述する。
車外映像撮影手段6は、単数または複数のカメラによって構成され、主に運転者にとって死角となる部分を中心に車外の映像を撮影する。
【0041】
画像合成手段7は、CPU、メモリによって構成され車外映像撮影手段6より映像を入力し、表示パラメータ決定手段5が決定したパラメータに基づいて映像を視点変換し合成する。詳細な合成方法については実施の形態1と同様であるため省略する。
【0042】
次に、図5における表示パラメータ決定手段5が決定する、スマートフォン10の表示手段3に表示するべき車外映像の表示パラメータおよび決定方法について説明する。
求める目的とするパラメータは実施の形態1と同様、y軸に沿った回転角θy、およびx軸に沿った回転角θxである。
【0043】
(フルスペックバージョン)
スマートフォン10の回転角φY、φXに応じて以下の式によりθy、θxを求める。θyは、θy=f(φY)=θy0+kyφY。θxは、θx=f(φX)=θx0+kxφX。
【0044】
θy0とθx0は、それぞれφX、φYがゼロのときの回転角であり初期回転角と呼ぶことにする。典型的には、初期回転角はゼロにしておく。θx、θyは、初期回転角よりφX、φYに係数ky、kxを乗じた線形な変化をする。
【0045】
(kx、kyの決定方法)
係数ky、kxは任意の定数である。典型的な場合は1となるが見やすさによって調整されるようにしてもよい。調整方法としては、例えば、調整画面を用意しておき、運転者が画面を見ながら値を増減することによって見え方が変わるようにすればよい。
【0046】
(簡易バージョン θyのみを使う)
また、上記方法においてx軸方向の回転を無視し、θyのみを算出すればよいとする場合も考えられる。この場合、図3bの前景ベクトル307および後景ベクトル308は、y軸方向の成分を持たない。表示される画面の上下方向の角度は一定となるが、これにより車両20の加速度センサおよびスマートフォン10の加速度センサは必要なくなり、より簡便な装置構成及び方法をとることが可能である。
次に、図5における車両20の主たる動作について図6のフロー図を用いて説明する。
【0047】
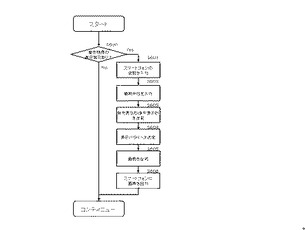
車両20は、起動し初期動作を終えると図6のフローを繰り返すループに入り。ループの最初のステップS600において、運転者より車外映像の表示指示があるかどうかを判定する。Noの場合は即座にループを抜ける。Yesの場合は、車両20はステップS601において、スマートフォン10よりスマートフォン10の姿勢に関する情報を入力する。スマートフォン10と車両20との通信方法については、USBなどの有線手段を介しても良いし、Wi−Fiなどの有線手段を介してもよい。次に、車両20はステップS602において車両20の方位を入力する。
【0048】
次に、車両20は前方を表示するか後方を表示するかを決定する。この方法については種々考えられる。一つは、運転者がタッチパネルなどの操作手段を介して前方表示か後方表示かを選択することができるようにする。例えば、画面をタップないしダブルタップすることによって前方表示か後方表示かを切り替えられるようにすればよい。別の方法については、車両20のシフトレバーの位置を参照する。例えば、バックに入っていれば運転者は後退しようとしていると見なされるので後方表示とし、それ以外の位置に入っていれば前方表示とする。更に別の方法については、スマートフォン10の傾きを見る。即ち、ステップS601で入力したスマートフォン10の姿勢には、図2で示したように、スマ
ートフォン10の傾きがφxとして含まれており、この値が正、即ちスマートフォン10の画面を見るユーザの視線が水平線よりも上を見上げる角度に向いていれば後方表示とし、負、即ちその反対であれば前方表示とする。これは、車の死角が基本的にドライバの位置よりも下方にあるため、水平線よりも上の方向に必要な車外映像の情報はないと見なせるためである。
【0049】
次に、車両20は、ステップS604において表示パラメータを決定する。次に、車両20はステップS605において画像を合成する。次に、車両20はステップS606においてスマートフォン10に画像を出力してループを終える。
【0050】
なお、本実施の形態1、2において、車両20とスマートフォン10間の通信手段については、有線・無線のどちらでもかまわない。無線の場合は、スマートフォンを束縛するものがないため、運転者は自由にスマートフォン10を回転して見たい方向の映像を見ることができる。有線の場合は、クレイドルと呼ばれる端末設置機構に通信コネクタのついたものにスマートフォン10を設置し、クレイドル自身が上下または左右に回転できる構成をもっていることが好ましい。これにより、ルームミラーのようにスマートフォン10を動かして映像を見ることができる。
【産業上の利用可能性】
【0051】
以上のように、本発明は、スマートフォンの姿勢を変化させることで非常に直感的に視野の向きを調節することができ、運転者はどこの映像を表示しているかを直感的に理解することができる車外映像表示装置として有用である。
【符号の説明】
【0052】
1 端末姿勢検出手段
2 操作入力手段
3 表示手段
4 車両姿勢検出手段
5 表示パラメータ決定手段
6 車外映像撮影手段
7 画像合成手段
10 スマートフォン
20 車両
【技術分野】
【0001】
本発明は、自動車内において、モバイル端末上で車外の映像を表示するアプリケーションに対して簡便に表示・操作することのできるシステムに関するものである。
【背景技術】
【0002】
自動車の運転者から見えない死角部分を、カメラで撮像し、その映像を車内のナビゲーション装置などのディスプレイ上に表示する車載装置が広く存在するが、カメラが映すことのできる視野角には限界がある。このため、ボタンやタッチパネル操作を用いて視野の向きを変更できる装置が存在する(例えば特許文献1)。また、複数のカメラ映像を合成して、あたかも車両上方から見える映像のように広角の範囲を一度に表示し、カメラ向きを特定する必要をなくした装置も存在する(例えば特許文献2)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−311052号公報
【特許文献2】特開2007−292535号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1のような装置においては、運転者にとって直感的に視野の向きを特定することが困難であり、現在の視野が運転者からみてどの角度の映像であるかを把握するのが困難であった。
【0005】
また、特許文献2のような装置においては、画像合成の限界により画像に歪みが発生したり、運転者は上方からの映像を見ても普段の視野とは大きく異なるため、運転操作によりどのように車両が挙動するのか、直感的に分かりづらいという困難点を解消することができる車外映像表示システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の車外映像表示システムは、車両とスマートフォンとからなるシステムであって、前記スマートフォンは、スマートフォン自身の姿勢を検出する端末姿勢検出手段と、情報を画面に表示する表示手段を持ち、前記車両は、車両自身の姿勢を検出する車両姿勢検出手段と、車外映像を撮影する車外映像撮影手段と、前記端末姿勢検出手段が検出した端末姿勢の変化量から前記表示手段に表示するべき車外映像の表示パラメータを決定する表示パラメータ決定手段と、前記車外映像撮影手段が撮影した映像を前記表示パラメータ決定手段が決定したパラメータにもとづいて合成する画像合成手段を備えることを特徴とする。
【0007】
本発明の車外映像表示システムの前記表示パラメータ決定手段は、前記端末姿勢検出手段が検出した端末姿勢と前記車両姿勢検出手段が検出した車両姿勢とから決定することを特徴とする。
【0008】
本発明の車外映像表示システムの前記端末姿勢検出手段および前記車両姿勢検出手段は、左右方向の回転角度を検出又は左右および上下方向の回転角度を検出し、前記表示パラメータ決定手段は、左右方向の回転角度を検出したときは車両に対する端末の左右方向の相対的な回転角を算出し、左右および上下方向の回転角度を検出したときには、車両に対する端末の左右および上下方向の相対的な回転角を算出して表示パラメータを決定するこ
とを特徴とする。
【0009】
本発明の車外映像表示システムの前記端末姿勢検出手段は、左右方向の回転角度を検出し又は左右および上下方向の回転角度を検出し、前記表示パラメータ決定手段は、左右方向の回転角度を検出するときは初期状態からの端末の左右方向の相対的な回転角を算出し、左右および上下方向の回転角度を検出したときは初期状態からの端末の左右および上下方向の相対的な回転角を算出し、これに基づいて表示パラメータを決定することを特徴とする。
【0010】
本発明の車外映像表示システムの前記車両および前記端末は、無線の通信手段又は有線の通信手段によって通信することが可能であることを特徴とする。
【0011】
本発明の車外映像表示システムの前記スマートフォンは、更にユーザの操作を検出する操作部を備え、前記操作部が検出した操作に応じて映像の表示方法を前記表示パラメータ決定手段で決定することを特徴とする。
【0012】
本発明の車外映像表示システムの前記車両は、端末の回転角に応じて表示パラメータの変化量の係数を定める変化量設定手段を更に備えることを特徴とする。
【発明の効果】
【0013】
本発明のシステムによれば、スマートフォンを「窓枠」または「鏡」に喩える形で、非常に直感的に視野の向きを調節することができる。このため、運転者はどこの映像を表示しているかを直感的に理解することができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施の形態1のシステム構成を示すブロック図
【図2】(a)スマートフォンの画面を正面にみたときを示す模式図(b)スマートフォンを傾けたとき示す模式図
【図3】(a)車両およびスマートフォンを上方から見た平面図(b)車両及びスマートフォンを側方から見た立面図
【図4】実施の形態1における車両の主たる動作を示すフロー図
【図5】本発明の実施の形態2のシステム構成を示すブロック図
【図6】実施の形態Bにおける車両の主たる動作を示すフロー図
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態に関わるシステムについて説明する。本発明の実施の形態に関わるシステムについては種々の設計状態が考えられるため、以下、実施の形態1、2として個々に記述することとする。
【0016】
(実施の形態1)
本発明に係わる実施の形態Aのシステム構成について、図1のブロック図を用いて説明する。
実施の形態1は、車両および端末の地磁気センサを用いてそれぞれの方位を求め、絶対的な位置関係を算出し、表示パラメータを決定する場合を想定している。このため、初期位置のリセットや回転角の調節などが必要でなくより正確な表示をすることができる。
図1において、スマートフォン10は、端末姿勢検出手段1、操作入力手段2、表示手段3を備えて構成されている。
【0017】
ここで、端末姿勢検出手段1は、加速度センサ、地磁気センサ、および処理部によって構成され、スマートフォン10の姿勢を検出することができるように構成されている。ま
た、検出されるパラメータについては後述する。
【0018】
操作入力手段2は、タッチパッド、各種スイッチなどのデバイスおよびその周辺の回路で構成され、実行中のアプリに対して運転者が命令を指示する際に用いられることができるように構成されている。ほぼ全てのスマートフォンにおいて、タッチパネルによって表示手段と操作手段が一体化して構成されている。
表示手段3は、液晶ディスプレイなどで構成され各種情報を表示するなどして運転者に情報を提示することができるように構成されている。
車両20は、車両姿勢検出手段4、表示パラメータ決定手段5、車外映像撮影手段6、画像合成手段7を備えて構成されている。
車両姿勢検出手段4は、加速度センサ、地磁気センサ、および処理部によって構成され、車両20の向いている方位を検出する。
【0019】
表示パラメータ決定手段5は、CPUとメモリによって構成され、車両姿勢検出手段4が検出した車両20の向きおよび端末姿勢検出手段1が検出したスマートフォン10の姿勢、更に操作入力手段2が検出する運転者の操作によって、スマートフォン10の表示手段3に表示するべき車外映像の表示パラメータを決定する。決定される表示パラメータおよび詳細な決定方法については後述する。
車外映像撮影手段6は単数または複数のカメラによって構成され、主に運転者にとって死角となる部分を中心に車外の映像を撮影する。
【0020】
画像合成手段7は、CPU、メモリによって構成され、車外映像撮影手段より映像を入力し、表示パラメータ決定手段5が決定したパラメータに基づいて映像を視点変換し合成する。詳細な合成方法については後述する。
次に、図1における端末姿勢検出手段が検出するスマートフォン10の姿勢のパラメータについて、図2a、図2bを用いて説明する。なお、図2aは、スマートフォンの画面を正面にみたときを示す模式図であり、図2bは、スマートフォンを傾けたとき示す模式図である。
【0021】
図2aに示すように、スマートフォン10の画面を正面にみたときに短辺方向を+X、−X軸、長辺方向を+Y、−Y軸、画面に垂直な方向を+Z、−Z軸と定める。
【0022】
本実施形態におけるスマートフォン10は、3軸のジャイロセンサを備えており、それぞれの軸に沿った回転成分φX201、φY202、φZ203を検出する。
【0023】
更に、本実施形態におけるスマートフォン10は、2軸または3軸の加速度センサと地磁気センサを備えている。加速度センサは、図2bにおけるベクトル204のようにスマートフォン10が持っている現在の加速度ベクトルを検出することができる(静止状態では、その成分は重力加速度である)。また、地磁気センサはベクトル205のように北の方位を示す北方位ベクトルを検出することが可能である。
【0024】
次に、図1における表示パラメータ決定手段が決定するスマートフォン10の表示手段に表示するべき車外映像の表示パラメータおよび決定方法について、図3a、3bを用いて説明する。なお、図3aは、車両およびスマートフォンを上方から見た平面図であり、図3bは、車両及びスマートフォンを側方から見た立面図である。
【0025】
(フルスペックバージョン)
図3aは、車両20およびスマートフォン10を上方から見た平面図、図3bは車両20及びスマートフォン10を側方から見た立面図である。車両20の進行方向を向いて左右に+x、−x軸、上下方向に+y、−y軸、前後方向に+z、−z軸を定める。
【0026】
本実施例における車両20は、地磁気センサを持っており図3aのベクトル301のように北の方位を示す北方位ベクトルを検出することが可能である。一方で、前述したようにスマートフォン10もベクトル302のように北方位ベクトルを検出する。両者を揃えることにより、水平平面上で車両20に対してスマートフォン10がどの方向を向いているかを検出することができる。具体的には、スマートフォン10が検出した北方位ベクトルのY軸方向回転角θNYから、車両20が検出した北方位ベクトルのy軸方向回転角θNyを差し引くことで車両20に対するスマートフォン10のy軸方向の回転角θy(303)を算出することができる。
【0027】
更に、本実施例における車両20は加速度センサを持っており、図3bのベクトル304のように車両20が持つ加速度を検出することが可能である。一方で、前述したようにスマートフォン10もベクトル305のように加速度ベクトルを検出する。スマートフォン10の加速度ベクトルから車両20の加速度ベクトルを差し引き、そのベクトルのx軸に対する回転角を求めることで車両20の対するスマートフォン10の傾きをx軸方向の回転角θx(306)として検出することができる。
【0028】
θx、θyを求めることにより、車両20とスマートフォン10の相対的な位置関係が求まるため、車両20に対してスマートフォン10が向いている方向の前景向きのベクトル307、および後景向きのベクトル308が求めることができる。
(簡易バージョン 車の加速度は無視する)
【0029】
なお、上記方法において、車両20がほぼ停止していると見なせる場合、車両20の加速度ベクトルは検出せずベクトル304はゼロと見なし、ベクトル305のみでθxを求めることもできる。これにより車両20の加速度センサは必要でなくなり、より簡便な装置構成および方法をとることが可能である。
【0030】
(簡易バージョン θyのみを使う)
また、上記方法において図3bに示したx軸方向の回転を無視し、θyのみを算出すればよいとする場合も考えられる。この場合、前景ベクトル307および後景ベクトル308はy軸方向の成分を持たない。表示される画面の上下方向の角度は一定となるが、これにより車両20の加速度センサおよびスマートフォン10の加速度センサは必要なくなり、より簡便な装置構成及び方法をとることが可能である。
次に、図1における画像合成手段の画像合成方法について説明する。なお、画像合成方法については既知の種々の方法を用いることができる。
【0031】
運転者に対して自動車周辺を撮影した画像を提示する技術としては、車両左右のバックミラーと車両後部中央との3カ所に設置した3つのカメラによって自動車後方を撮影した画像を1つの画像に合成して表示する技術が知られている(例えば、特開平10−257482 )。
【0032】
また、特開2007−158427のように複数のカメラを用いて、一つの仮想的な視点から自車後方を観察したようすをできるだけリアリティある形態で模擬する技術が存在している。
次に、図1における車両20の主たる動作について、図4のフロー図を用いて説明する。
【0033】
車両20は、起動し初期動作を終えると図4のフローを繰り返すループに入る。ループの最初のステップS400において、運転者より車外映像の表示指示があるかどうかを判定する。Noの場合は即座にループを抜ける。Yesの場合は、車両20はステップS4
01においてスマートフォン10よりスマートフォン10の姿勢に関する情報を入力する。スマートフォン10と車両20との通信方法については、USBなどの有線手段を介しても良いし、Wi−Fiなどの有線手段を介してもよい。次に、車両20はステップS402において車両20の方位を入力する。
【0034】
次に、車両20は前方を表示するか後方を表示するかを決定する。この方法については種々考えられる。一つは、運転者がタッチパネルなどの操作手段を介して前方表示か後方表示かを選択することができるようにする。例えば、画面をタップないしダブルタップすることによって前方表示か後方表示かを切り替えられるようにすればよい。別の方法については、車両20のシフトレバーの位置を参照する。例えば、バックに入っていれば運転者は後退しようとしていると見なされるので後方表示とし、それ以外の位置に入っていれば前方表示とする。更に別の方法については、スマートフォン10の傾きを見る。即ち、ステップS401で入力したスマートフォン10の姿勢には、図2で示したように、スマートフォン10の傾きがφxとして含まれており、この値が正、即ちスマートフォン10の画面を見るユーザの視線が水平線よりも上を見上げる角度に向いていれば後方表示とし、負、即ちその反対であれば前方表示とする。これは、車の死角が基本的にドライバの位置よりも下方にあるため、水平線よりも上の方向に必要な車外映像の情報はないと見なせるためである。
【0035】
次に、車両20は、ステップS404において表示パラメータを決定する。次に、車両20は、ステップS405において画像を合成する。次に、車両20はステップS406においてスマートフォン10に画像を出力してループを終える。
【0036】
(実施の形態2)
次に本発明に係わる実施の形態2のシステム構成について、図5のブロック図を用いて説明する。
【0037】
実施の形態2は、端末の初期状態とそこからの回転成分の差分のみを用いて表示パラメータを決定する場合を想定している。これにより、より簡便な方法で本発明の機能を実現することができる。
図5において、スマートフォン10は端末姿勢検出手段1、操作入力手段2、表示手段3を備えて構成されている。
【0038】
端末姿勢検出手段1は、加速度センサ、地磁気センサ、および処理部によって構成されスマートフォン10の姿勢を検出することができるように構成されている。検出されるパラメータについては、実施の形態Aと同様であるため省略する。
【0039】
操作入力手段2は、タッチパッド、各種スイッチなどのデバイスおよびその周辺の回路で構成され実行中のアプリに対して運転者が命令を指示する際に用いられる。ほぼ全てのスマートフォンにおいて、タッチパネルによって表示手段と操作手段が一体化している。
表示手段3は液晶ディスプレイなどで構成され、各種情報を表示するなどして運転者に情報を提示する。
車両20は、表示パラメータ決定手段5、車外映像撮影手段6、画像合成手段7を備えて構成されている。
【0040】
表示パラメータ決定手段5は、CPUとメモリによって構成され車両姿勢検出手段4が検出した車両20の向き、および端末姿勢検出手段1が検出したスマートフォン10の姿勢、更に操作入力手段2が検出する運転者の操作によって、スマートフォン10の表示手段3に表示するべき車外映像の表示パラメータを決定する。決定される表示パラメータおよび詳細な決定方法については後述する。
車外映像撮影手段6は、単数または複数のカメラによって構成され、主に運転者にとって死角となる部分を中心に車外の映像を撮影する。
【0041】
画像合成手段7は、CPU、メモリによって構成され車外映像撮影手段6より映像を入力し、表示パラメータ決定手段5が決定したパラメータに基づいて映像を視点変換し合成する。詳細な合成方法については実施の形態1と同様であるため省略する。
【0042】
次に、図5における表示パラメータ決定手段5が決定する、スマートフォン10の表示手段3に表示するべき車外映像の表示パラメータおよび決定方法について説明する。
求める目的とするパラメータは実施の形態1と同様、y軸に沿った回転角θy、およびx軸に沿った回転角θxである。
【0043】
(フルスペックバージョン)
スマートフォン10の回転角φY、φXに応じて以下の式によりθy、θxを求める。θyは、θy=f(φY)=θy0+kyφY。θxは、θx=f(φX)=θx0+kxφX。
【0044】
θy0とθx0は、それぞれφX、φYがゼロのときの回転角であり初期回転角と呼ぶことにする。典型的には、初期回転角はゼロにしておく。θx、θyは、初期回転角よりφX、φYに係数ky、kxを乗じた線形な変化をする。
【0045】
(kx、kyの決定方法)
係数ky、kxは任意の定数である。典型的な場合は1となるが見やすさによって調整されるようにしてもよい。調整方法としては、例えば、調整画面を用意しておき、運転者が画面を見ながら値を増減することによって見え方が変わるようにすればよい。
【0046】
(簡易バージョン θyのみを使う)
また、上記方法においてx軸方向の回転を無視し、θyのみを算出すればよいとする場合も考えられる。この場合、図3bの前景ベクトル307および後景ベクトル308は、y軸方向の成分を持たない。表示される画面の上下方向の角度は一定となるが、これにより車両20の加速度センサおよびスマートフォン10の加速度センサは必要なくなり、より簡便な装置構成及び方法をとることが可能である。
次に、図5における車両20の主たる動作について図6のフロー図を用いて説明する。
【0047】
車両20は、起動し初期動作を終えると図6のフローを繰り返すループに入り。ループの最初のステップS600において、運転者より車外映像の表示指示があるかどうかを判定する。Noの場合は即座にループを抜ける。Yesの場合は、車両20はステップS601において、スマートフォン10よりスマートフォン10の姿勢に関する情報を入力する。スマートフォン10と車両20との通信方法については、USBなどの有線手段を介しても良いし、Wi−Fiなどの有線手段を介してもよい。次に、車両20はステップS602において車両20の方位を入力する。
【0048】
次に、車両20は前方を表示するか後方を表示するかを決定する。この方法については種々考えられる。一つは、運転者がタッチパネルなどの操作手段を介して前方表示か後方表示かを選択することができるようにする。例えば、画面をタップないしダブルタップすることによって前方表示か後方表示かを切り替えられるようにすればよい。別の方法については、車両20のシフトレバーの位置を参照する。例えば、バックに入っていれば運転者は後退しようとしていると見なされるので後方表示とし、それ以外の位置に入っていれば前方表示とする。更に別の方法については、スマートフォン10の傾きを見る。即ち、ステップS601で入力したスマートフォン10の姿勢には、図2で示したように、スマ
ートフォン10の傾きがφxとして含まれており、この値が正、即ちスマートフォン10の画面を見るユーザの視線が水平線よりも上を見上げる角度に向いていれば後方表示とし、負、即ちその反対であれば前方表示とする。これは、車の死角が基本的にドライバの位置よりも下方にあるため、水平線よりも上の方向に必要な車外映像の情報はないと見なせるためである。
【0049】
次に、車両20は、ステップS604において表示パラメータを決定する。次に、車両20はステップS605において画像を合成する。次に、車両20はステップS606においてスマートフォン10に画像を出力してループを終える。
【0050】
なお、本実施の形態1、2において、車両20とスマートフォン10間の通信手段については、有線・無線のどちらでもかまわない。無線の場合は、スマートフォンを束縛するものがないため、運転者は自由にスマートフォン10を回転して見たい方向の映像を見ることができる。有線の場合は、クレイドルと呼ばれる端末設置機構に通信コネクタのついたものにスマートフォン10を設置し、クレイドル自身が上下または左右に回転できる構成をもっていることが好ましい。これにより、ルームミラーのようにスマートフォン10を動かして映像を見ることができる。
【産業上の利用可能性】
【0051】
以上のように、本発明は、スマートフォンの姿勢を変化させることで非常に直感的に視野の向きを調節することができ、運転者はどこの映像を表示しているかを直感的に理解することができる車外映像表示装置として有用である。
【符号の説明】
【0052】
1 端末姿勢検出手段
2 操作入力手段
3 表示手段
4 車両姿勢検出手段
5 表示パラメータ決定手段
6 車外映像撮影手段
7 画像合成手段
10 スマートフォン
20 車両
【特許請求の範囲】
【請求項1】
車両とスマートフォンとからなるシステムであって、
前記スマートフォンは、
スマートフォン自身の姿勢を検出する端末姿勢検出手段と、
情報を画面に表示する表示手段を持ち、
前記車両は、
車両自身の姿勢を検出する車両姿勢検出手段と、
車外映像を撮影する車外映像撮影手段と、
前記端末姿勢検出手段が検出した端末姿勢の変化量から前記表示手段に表示するべき車外映像の表示パラメータを決定する表示パラメータ決定手段と、
前記車外映像撮影手段が撮影した映像を前記表示パラメータ決定手段が決定したパラメータにもとづいて合成する画像合成手段を備えることを特徴とする車外映像表示システム。
【請求項2】
前記表示パラメータ決定手段は、前記端末姿勢検出手段が検出した端末姿勢と前記車両姿勢検出手段が検出した車両姿勢とから決定することを特徴とする請求項1に記載の車外映像表示システム。
【請求項3】
前記端末姿勢検出手段および前記車両姿勢検出手段は、左右方向の回転角度を検出又は左右および上下方向の回転角度を検出し、前記表示パラメータ決定手段は、左右方向の回転角度を検出したときは車両に対する端末の左右方向の相対的な回転角を算出し、左右および上下方向の回転角度を検出したときには、車両に対する端末の左右および上下方向の相対的な回転角を算出して表示パラメータを決定することを特徴とする請求項1に記載の車外映像表示システム。
【請求項4】
前記端末姿勢検出手段は、左右方向の回転角度を検出し又は左右および上下方向の回転角度を検出し、前記表示パラメータ決定手段は、左右方向の回転角度を検出するときは初期状態からの端末の左右方向の相対的な回転角を算出し、左右および上下方向の回転角度を検出したときは初期状態からの端末の左右および上下方向の相対的な回転角を算出し、これに基づいて表示パラメータを決定することを特徴とする請求項2に記載の車外映像表示システム。
【請求項5】
前記車両および前記端末は、無線の通信手段又は有線の通信手段によって通信することが可能であることを特徴とする請求項1から請求項4のいずれかに記載の車外映像表示システム。
【請求項6】
前記スマートフォンは、更にユーザの操作を検出する操作部を備え、
前記操作部が検出した操作に応じて映像の表示方法を前記表示パラメータ決定手段で決定することを特徴とする請求項1から請求項5のいずれかに記載の車外映像表示システム。
【請求項7】
前記車両は、端末の回転角に応じて表示パラメータの変化量の係数を定める変化量設定手段を更に備えることを特徴とする請求項1から請求項6に記載の車外映像表示システム。
【請求項1】
車両とスマートフォンとからなるシステムであって、
前記スマートフォンは、
スマートフォン自身の姿勢を検出する端末姿勢検出手段と、
情報を画面に表示する表示手段を持ち、
前記車両は、
車両自身の姿勢を検出する車両姿勢検出手段と、
車外映像を撮影する車外映像撮影手段と、
前記端末姿勢検出手段が検出した端末姿勢の変化量から前記表示手段に表示するべき車外映像の表示パラメータを決定する表示パラメータ決定手段と、
前記車外映像撮影手段が撮影した映像を前記表示パラメータ決定手段が決定したパラメータにもとづいて合成する画像合成手段を備えることを特徴とする車外映像表示システム。
【請求項2】
前記表示パラメータ決定手段は、前記端末姿勢検出手段が検出した端末姿勢と前記車両姿勢検出手段が検出した車両姿勢とから決定することを特徴とする請求項1に記載の車外映像表示システム。
【請求項3】
前記端末姿勢検出手段および前記車両姿勢検出手段は、左右方向の回転角度を検出又は左右および上下方向の回転角度を検出し、前記表示パラメータ決定手段は、左右方向の回転角度を検出したときは車両に対する端末の左右方向の相対的な回転角を算出し、左右および上下方向の回転角度を検出したときには、車両に対する端末の左右および上下方向の相対的な回転角を算出して表示パラメータを決定することを特徴とする請求項1に記載の車外映像表示システム。
【請求項4】
前記端末姿勢検出手段は、左右方向の回転角度を検出し又は左右および上下方向の回転角度を検出し、前記表示パラメータ決定手段は、左右方向の回転角度を検出するときは初期状態からの端末の左右方向の相対的な回転角を算出し、左右および上下方向の回転角度を検出したときは初期状態からの端末の左右および上下方向の相対的な回転角を算出し、これに基づいて表示パラメータを決定することを特徴とする請求項2に記載の車外映像表示システム。
【請求項5】
前記車両および前記端末は、無線の通信手段又は有線の通信手段によって通信することが可能であることを特徴とする請求項1から請求項4のいずれかに記載の車外映像表示システム。
【請求項6】
前記スマートフォンは、更にユーザの操作を検出する操作部を備え、
前記操作部が検出した操作に応じて映像の表示方法を前記表示パラメータ決定手段で決定することを特徴とする請求項1から請求項5のいずれかに記載の車外映像表示システム。
【請求項7】
前記車両は、端末の回転角に応じて表示パラメータの変化量の係数を定める変化量設定手段を更に備えることを特徴とする請求項1から請求項6に記載の車外映像表示システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−208819(P2012−208819A)
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願番号】特願2011−75018(P2011−75018)
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成24年10月25日(2012.10.25)
【国際特許分類】
【出願日】平成23年3月30日(2011.3.30)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]