
車種判別装置及び運転支援装置
【課題】簡単に、かつ低コストに、自車両の前方を走行する車両の種別判別を行うことができる種別判別装置を提供する。
【解決手段】本発明の種別判別装置によれば、車載カメラ11が自車両に搭載されており、当該車載カメラ11が走行中自車両の前方を走行している車両を撮影する。画像メモリ12に撮影した画像を記憶する。そして、画像処理手段13は、撮影した前方車両の特長部位の画像を構成する画素数を計測する。更に、車種判別手段14は、計測した画素数と予め定めた閾値とを比較し、前方車両の車種を判別する。
【解決手段】本発明の種別判別装置によれば、車載カメラ11が自車両に搭載されており、当該車載カメラ11が走行中自車両の前方を走行している車両を撮影する。画像メモリ12に撮影した画像を記憶する。そして、画像処理手段13は、撮影した前方車両の特長部位の画像を構成する画素数を計測する。更に、車種判別手段14は、計測した画素数と予め定めた閾値とを比較し、前方車両の車種を判別する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車種判別装置及び運転支援装置に関するものである。
【背景技術】
【0002】
現在、運転者の運転負荷を軽減するために運転支援を行う様々な車両の運転支援装置が開発されている。車両の運転支援装置の一つとして、前方車両に追従して走行するために前方車両との車間を制御するものがある。この車間制御を精度よく行うことは、前方走行中の車両の車種に応じた車間距離を保持することを法律(道路交通法の車間距離保持義務違反)でも義務づけられ、かつ安全上からも、重要となっている。この車間制御を精度よく行うためには前方走行中の車両の車種を判定することが要求される。前方車両の車種を判別する方法が従来よりいくつか提案されている。その一つとして、特許文献1には走行中の自車両から前方車両に向けて例えば電磁波を送信し、前方走行中の車両のフレーム(車軸を支持する車体シャーシの一部材)から反射してくる反射波を受信して、反射波から反射点を検知する。そして、特許文献1では、検知した反射点に基づいて前方車両のフレームの有無または形状を検出し、その検出結果により走行中の前方車両の車種を判別している。
【0003】
一方、特許文献2には、次のような車種判別装置が提案されている。この車種判別装置は、固定されたカメラを用いて設置前方又は下方を通過する車両の画像の時間変化量から車両のエッジを検出する。エッジを検出した期間に基づいて通過した車両の車高又は車幅を計測する。そして、計測した車幅又は車高に基づいて通過車両の車種を判別する。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1はレーザレーダを用いているため、装置全体のコストが高くなるという問題がある。また、上記特許文献2は、カメラを用いて撮影した走行車両の画像を処理して車種判別を行う装置であり高精度の判別が可能であるが、カメラが固定されているために、配置された特定の場所でしか車種判別ができない。また、カメラを自車両に搭載して上記特許文献2の車種判別方法を適用して自車両の前方車両の車種を判別しようとした場合、自車両と前方車両が互いに走行しているのでカメラによって撮影した画像の時間変化量が極めて小さく、前方車両の2つのエッジを検出できたとしてもエッジ間の実長を計測できず、前方車両の車種は判別できない。
【0005】
本発明は以上の問題点に鑑みなされたものであり、その目的は、簡単に、かつ低コストに、自車両の前方を走行する車両の車種判別を行うことができる車種判別装置を実現することである。また、車種判別結果に基づいて運転者の支援を効果的に行うことができる運転支援装置を提供することである。
【課題を解決するための手段】
【0006】
請求項1の発明は、車両に搭載されて自車両の前方を走行する前方車両を判別する車種判別装置において、自車両に搭載され、自車両の前方車両を撮影する車載カメラと、撮影した画像を記憶する画像メモリと、撮影した前方車両の特長部位の画像を構成する画素数を計測する画像処理手段と、計測した画素数と予め定めた閾値とを比較し、前方車両の車種を判別する車種判別手段とを具備することを特徴とする車種判別装置である。
また、請求項2の発明は、請求項1記載の車種判別装置において、前方車両の上記特長部位は、車幅、車高、タイヤ幅あるいはトレッドであることを特徴とするものである。
更に、請求項3の発明は、請求項1又は2に記載の車種判別装置において、上記画像処理手段は、前方車両のタイヤの設置点が上記車載カメラの最大画角に一致したときの前方車両の上記特長部位の画素数を計測することを特徴とするものである。
また、請求項4の発明は、請求項1又は2に記載の車種判別装置において、上記車載カメラの最大画角に上記車載カメラにおける前方車両のタイヤの設置点が一致していないとき、上記画像処理手段によって計測した前方車両の上記特長部位の画素数を、前方車両のタイヤの設置点が上記車載カメラの最大画角に一致させたときの前方車両の上記特長部位の画素数に換算する画素数換算手段を有し、上記車種判別手段では上記画素数換算手段によって換算した前方車両の上記特長部位の画素数と上記閾値とを比較して前方車両の車種を判別することを特徴とするものである。
更に、請求項5の発明は、請求項1〜4のいずれか1項に記載の車種判別装置において、上記閾値は、自車両と前方車両との車間距離が車種別適正車間距離となったときの車載カメラの撮像上での画素数であることを特徴とするものである。
また、請求項6の発明は、請求項1〜5のいずれか1項に記載の車種判別装置において、上記車種判別手段は、前方車両の上記特長部位のうち複数の特長部位の画素数を上記画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別することを特徴とするものである。
更に、請求項7の発明は、請求項4記載の車種判別装置において、上記車種判別手段は、前方車両の上記特長部位のうち複数の特長部位の画素数を画像処理手段によって計測した各値又は上記画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別することを特徴とするものである。
また、請求項8の発明は、請求項1〜7のいずれか1項に記載の車種判別装置と、該車種判別装置によって判別された結果の前方車両の車種に応じて自車両と前方車両との車間距離を制御する車間距離制御手段とを具備することを特徴とする運転支援装置である。
更に、請求項9の発明は、請求項8記載の車種判別装置において、上記前方車両の車種情報に基づいて自車両の運転手に警告を出力する警告出力手段を有することを特徴とするものである。
また、請求項10の発明は、請求項8又は9に記載の運転支援装置において、上記車間距離制御手段は、自車両の走行速度を制御する速度制御手段と、自車両の制動を制御する制動制御手段とを有することを特徴とするものである。
更に、請求項11の発明は、請求項8〜10のいずれか1項に記載の運転支援装置において、自車両の後方を走行している他の車両に、前方車両の車種情報を送信する通信手段を有することを特徴とするものである。
また、請求項12の発明は、請求項8〜11のいずれか1項に記載の運転支援装置において、上記車種判別装置によって判別された前方車両の車幅の時間変化量を検出する車幅時間変化量検出手段を有することを特徴とするものである。
更に、請求項13の発明は、請求項9又は12に記載の運転支援装置において、上記車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が一定基準を超えた場合は車間距離が小さくなったと認識して当該認識結果を基づく警告を上記警告出力手段によって運転手に出力することを特徴とするものである。
また、請求項14の発明は、請求項9又は12に記載の運転支援装置において、上記車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が急に大きくなった後急に小さくなった場合自車両の前方の他の車両が進入して来たと認識して当該認識結果を基づく警告を上記警告出力手段によって運転手に出力することを特徴とするものである。
【発明の効果】
【0007】
以上、本発明によれば、簡単に、かつ低コストに、自車両の前方を走行する車両の種別判別を行うことができる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施の形態に係る車種判別装置の構成を示すブロック図である。
【図2】本発明の車種判別処理の原理を説明する図である。
【図3】本発明の車種判別処理の原理を説明する図である。
【図4】本発明の車種判別処理の原理を説明する図である。
【図5】自車両から前方車両を車載カメラで撮影した画像の図である。
【図6】本発明の車種判別処理動作を示すフローチャートである。
【図7】本発明の車種判別処理の原理を説明する図である。
【図8】本発明の車種判別処理の原理を説明する図である。
【図9】前方車両の車幅の時間変化量を示す特性図である。
【図10】本発明の一実施の形態に係る運転支援装置の構成を示すブロック図である。
【発明を実施するための形態】
【0009】
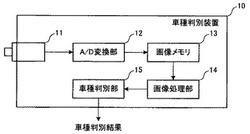
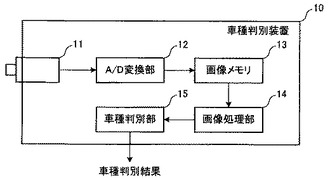
図1は本発明の一実施の形態に係る車種判別装置の構成を示すブロック図である。同図に示すように本実施の形態の車種判別装置10は、自車両に搭載された広角レンズを有し、自車両の前方を走行する前方車両を撮影する車載カメラ11と、車載カメラ11によって撮影されたアナログ画像信号をデジタル画像信号に変換するA/D変換部12と、変換後のデジタル画像信号の画像データを一時格納する画像メモリ13と、当該画像データに対して画像処理を施し、前方車両のトレッド(車軸の長さ)、車幅、車高、タイヤ幅などの車両特長部位の実長に対応する車載カメラにおける撮像画素数を計測する画像処理部14と、画像処理後の画素数の計測結果と予め定めた閾値とを比較し、例えば普通乗用車、中型車、大型車という車種を判別する車種判別部15とを具備している。
【0010】
このような構成を有する本実施の形態の車種判別装置10によれば、自車両に設置された広角レンズを有する車載カメラ11で前方車両を撮影し、撮影した画像のアナログ画像信号をA/D変換部12でデジタル画像信号に変換し画像メモリ13に記憶する。ただし、デジタル出力の車載カメラでも良いため、A/D変換がない構成でも可能である。画像処理部14は画像メモリ13に記憶された車載カメラ11で撮影した画像を画像処理することでトレッド、車幅、車高、タイヤ幅などを画素数で計測する。次に、車種判別部15では車種判別に用いる車種ごとのトレッド、車幅、車高、タイヤ幅の画素数の閾値と、画像処理部14で計測されたトレッド、車幅、車高、タイヤ幅などの画素数の計測結果とを比較する。その比較の結果により、例えば普通乗用車、中型車、大型車という車種を判別する。
【0011】
次に、本発明の車種判別処理の原理について図面を用いて概説する。
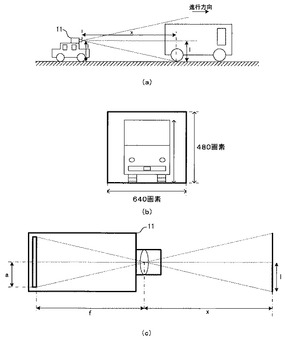
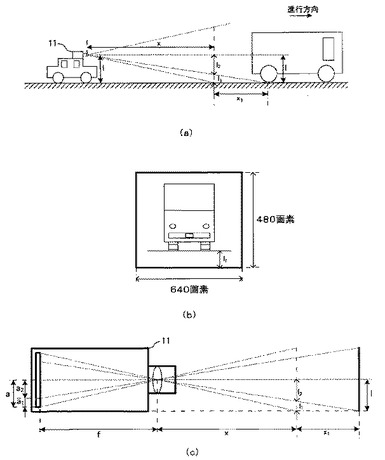
図2の(a)は走行中の前方車両の後方部を搭載カメラで撮影している全体の様子を横から見た図であり、同図の(b)は撮像素子上での画像を示す図である。また、同図の(c)は同図の(a)を模式した図である。更に、同図は前方車両の車高を計測する原理を示しており、同図は前方車両のタイヤの接地点が車載カメラの最大画角にあるときの図である。更に、車載カメラの設置位置に限定はなく、車両内部でも外部でもよい。また、設置角度にも限定はなく、自分の車の前方が良好に撮影されるように設置されていればよい。この例では車載カメラ11の光軸が地面に対して平行であるときの状態である。図中の点線は車載カメラ11の最大垂直画角の範囲を表している。
【0012】
先ず、図2の(b)に示すように前方車両のタイヤの接地点が車載カメラの最大画角にあるとき、図2の(c)に示すように自車両と前方車両の距離をx[mm]、撮像センサの縦方向の半分の大きさをa、車載カメラのレンズ焦点距離をf[mm]、撮像センサ縦の半分に相当する線までの前方車両のタイヤからの高さをlとする。ここで、撮像センサの縦方向の半分の大きさaは、例えば撮像センサのサイズが640×480画素であって1画素あたりの長さが0.006[mm]のセンサの場合、1.44[mm](=480×0.006/2[mm])となる。また、fは車載カメラのレンズ焦点距離であるので既知であるので、例えばfを2.8とする。lはカメラを地面から何mm離して設置したかによって決まるのでやはり既知である。例えばlを1.35[m]とする。よって、自車両と前方車両の距離xは、a:f=l:xの関係から求まり、上記したa,f,lの既知の値により、x=2625[mm](=2.625[m])となる。
【0013】
図3の(a)は走行中の前方車両を車載カメラで撮影している全体の様子を上から見た図であり、同図の(b)は同図の(b)を模式した図である。上述したように、自車両と前方車両との車間距離xを求めた後、図2の(b)に示すように前方車両のタイヤの接地点が車載カメラの最大画角にあるとき、自車両と前方車両の距離をx[mm]、撮像センサの横方向の半分の大きさをb、車載カメラのレンズ焦点距離をf[mm]、撮像センサ縦の半分に相当する線までの前方車両のタイヤ接地位置を含む水平方向の幅をyとする。ここで、撮像センサの横方向の半分の大きさbは、例えば撮像センサのサイズが640×480画素であって1画素あたりの長さが0.006mmのセンサの場合、1.92mm(=640×0.006/2mm)となる。また、fは車載カメラのレンズ焦点距離であるので既知であるので、例えばfを2.8とする。xが上述のように求められているので、yはb:f=y:xの関係から求まることになる。そして、当該関係式と上記したa,f,xの値とにより、y=1800[mm](=1.8[m])となる。また、上述したように、車載カメラの設置が地面に対して平行なので画像の垂直方向の長さの半分はl(=1.35[m])である。以上のことから、車載カメラは水平方向で2y(=3600[mm])、垂直方向で2l(=2700[mm])の画像を撮影していることがわかる。
【0014】
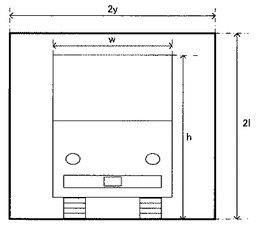
次に、撮像センサ上に撮影されている画像の高さや幅と撮像センサ上の画素数の関係がわかるため、画素数から実際に撮影している画像、つまり自車両の前方を走行している車両の車幅、車高を求めることができる。この原理を図4を用いて説明すると、同図中のwは前方車両の車幅であり、hは前方車両の車高である。ここで、2yと2lは上述したように求められている。2lの高さに相当する垂直方向の画素数が480なので、2l:480=h:pとなる。この関係から、pが求められる。
【0015】
例えば前方車両が中型車であるとすれば、画素数pが中型車の車高を表す最大画素数であり、画像中の前方車両の車幅の画素数がpを超えた場合には前方車両は大型車であると判別できる。よって、このpは前方車両が大型車であることを判別するための閾値であることになる。以上の方法により、車高と同様に、車幅w、タイヤ幅、トレッド幅などの大型車判別用の各閾値を求めることができる。
【0016】
なお、本実施の形態の車種判別方法における前方車両の車種判別は、細分化の車種判別を行いたいのか、単に大型車であるか否かの判定をしたいのかなど、目的に応じて車高、車幅、トレッド、タイヤ幅の情報が全て必要なのか、一つだけで構わないのかを決めることが可能である。例では、車高の値のみを利用して、車種判別をおおまかに、普通車、中型車、大型車と分けるときについて説明する。
【0017】
以下の表1に、普通車、中型車、大型車の車高を表中の数値で設定したときの、車高の閾値を例として示した。これらの閾値は事象データとして記憶テーブルに記憶されている。このように、画素数での閾値は、法上の車種に応じた車間距離に対応する値としたが、任意に設定可能である。
【0018】
【表1】

【0019】
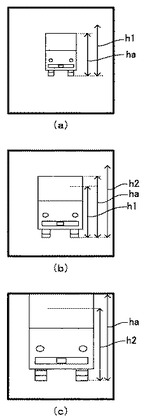
図5は自車両から前方車両を車載カメラで撮影した画像の図である。つまり、前方車両の後方が画面には映っている。同図の(a)は自車両と前方車両との車間距離が長いときの画像である。同図の(b)は自車両と前方車両との車間距離が小さくなったときの画像である。同図の(c)は自車両と前方車両との車間距離が同図の(b)の距離よりも更に小さくなったときの画像である。同図において、haは各画像に映っている車両の車高部分を画素数で表したものである。よって、前方車両が自車両に近くなればなるほどhaは大きくなる。また、h1は普通車が自車両に最も近づいたときの車高を画素数で表し、h2は中型車が自車両に最も近づいたときの車高を画素数で表した値である。また、図中には示されていないが、h3は大型車が自車両に最も近づいた時の車高を画素数で表した値である。これらのh1、h2、h3は、任意に設定可能であり、例えば車種別の適正距離になったときの画素数としてもよい値である。上記表1を例とすると、h1が240、h2が320、h3が462である。もし、前方車両が中型車ではなく普通車であった場合、普通車がどんなに自車両に近づいたとしてもh1よりも大きな値をとることはない。図5のときのha,h1,h2,h3の関係と判定結果を下記の表2に示す。
【0020】
【表2】
【0021】
例えば、上記の画素数によって、自分の車の前方を走行している大型車が死角状況を写したカメラ画像を常に発信している状態のときに、自分の車から大型車が遠い距離にいるときには画像を受信しないように制御し、接近したときのみ大型車のカメラ画像を受信し、近づきすぎたら画像の受信を中止し、車間制御することが表3に示したように可能である。
【0022】
【表3】
【0023】
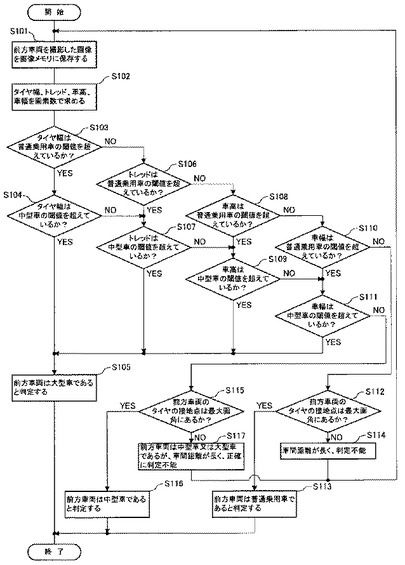
次に、上述した車高計測だけではなく、車幅、タイヤ幅、トレッドなどの閾値を組み合わせた車種判別処理方法について動作フローの一例を示す図6に従って概説する。
先ず、図1の車載カメラ11によって撮影された前方車両の画像が画像メモリ12に記憶し(ステップS101)、前方車両のタイヤ幅、トレッド、車高、車幅を上述した方法に基づいて検出する(ステップS102)。続いて、画像中の前方車両のタイヤ幅の画素数を予め求められている普通乗用車のタイヤ幅の閾値と比較する(ステップS103)。超えていたら、中型車のタイヤ幅の閾値と比較する(ステップS103;YES、ステップS104)。そして、中型車のタイヤ幅の閾値も越えていたら大型車であると判定する(ステップS104;YES、ステップS105)。
【0024】
そして、ステップS103で、画像中の前方車両のタイヤ幅の画素数が予め求められている普通乗用車のタイヤ幅の閾値を超えていない場合は、画像中の前方車両のトレッドの画素数と予め求められている普通乗用車のトレッドの閾値と比較する(ステップS103;NO、ステップS106)。超えていたら、またステップS104で画像中の前方車両のタイヤ幅の画素数が中型車のタイヤ幅の閾値を超えていない場合、中型車のトレッドの閾値と比較する(ステップS104;NO、ステップS106;YES、ステップS107)。そして、中型車のトレッドの閾値も越えていたら大型車であると判定する(ステップS107;YES、ステップS105)。
【0025】
また、ステップS106で、画像中の前方車両のトレッドの画素数が予め求められている普通乗用車のトレッドの閾値を超えていない場合は、画像中の前方車両の車高の画素数と予め求められている普通乗用車の車高の閾値と比較する(ステップS106;NO、ステップS108)。超えていたら、またステップS107で画像中の前方車両のトレッドの画素数が中型車のトレッドの閾値を超えていない場合、中型車の車高の閾値と比較する(ステップS107;NO、ステップS108;YES、ステップS109)。そして、中型車の車高の閾値も越えていたら大型車であると判定する(ステップS109;YES、ステップS105)。
【0026】
更に、ステップS108で、画像中の前方車両の車高の画素数が予め求められている普通乗用車の車高の閾値を超えていない場合は、画像中の前方車両の車幅の画素数と予め求められている普通乗用車の車幅の閾値と比較する(ステップS108;NO、ステップS110)。超えていたら、またステップS109で画像中の前方車両の車高の画素数が中型車の車高の閾値を超えていない場合、中型車の車幅の閾値と比較する(ステップS109;NO、ステップS110;YES、ステップS111)。そして、中型車の車幅の閾値も越えていたら大型車であると判定する(ステップS111;YES、ステップS105)。
【0027】
そして、ステップS110で、画像中の前方車両の車幅の画素数が予め求められている普通乗用車の車幅の閾値を超えていない場合は、前方車両のタイヤの接地点が撮像センサの最大画角にあるか否かを判定する(ステップS110;NO、ステップS112)。判定した結果、前方車両のタイヤの接地点が撮像センサの最大画角にあれば、前方車両が一番大きく見えている状態なので各項目で閾値を超えることはないので前方車両は普通乗用車であると判定する(ステップS112;YES、ステップS113)。
【0028】
一方、前方車両のタイヤの接地点が撮像センサの最大画角になければ、自車両と前方車両の車間距離が長く、判定不能であるとし(ステップS114)、ステップS101に戻る。また、ステップS111で、画像中の前方車両の車幅の画素数が予め求められている中型車の車幅の閾値を超えていない場合でも、前方車両のタイヤの接地点が撮像センサの最大画角にあるか否かを判定する(ステップS111;NO、ステップS115)。判定した結果、前方車両のタイヤの接地点が撮像センサの最大画角にあれば、前方車両は中型車であると判定する(ステップS115;YES、ステップS116)。一方、前方車両のタイヤの接地点が撮像センサの最大画角になければ、前方車両は中型車あるいは大型車のいずれかであるが、この場合車間距離が長く判定不能とし(ステップS115;NO、ステップS117)、ステップS101に戻る。
【0029】
なお、普通乗用車、中型車、大型車というような大きく三種類に判別するのではなく、より細かく前方車両の車種を判別したいときには、上述した画像処理にナンバープレート認識を組み合わせると細かく車種判別が可能である。また、図6に示す動作フロー判別の順番は限定するのものではない。判別したい車種の特長を見極め、閾値を利用して処理速度が速いようなシステムを作ることができる。更に、判定項目も限定する必要はない。車幅に対する車高の比が1以下か1未満かという項目を作る例も考えられる。判別したい大型車の大部分が車幅を1としたときの車高が1以上であるという特長があれば、このような車幅に対する車高の比という車種判別項目を追加することで大型車であると判別する時間が短くなる。
【0030】
上述した実施の形態における車種判別処理の原理では、撮影した前方車両のタイヤの接地点が車載カメラの最大画角にあるときを前提としていたが、この場合で当該前提となるために車載カメラの最大画角に前方車両のタイヤの接地点が一致するまで処理できないということになる。そこで、車載カメラの最大画角に前方車両のタイヤの接地点が一致していない状況であっても車種判別処理ができる実施の形態について以下に説明する。
【0031】
図7の(a)は走行中の前方車両の後方部を搭載カメラで撮影している全体の様子を横から見た図であり、同図の(b)は撮像素子上での画像を示す図である。また、同図の(c)は同図の(a)を模式した図である。更に、この例でも車載カメラ11の光軸が地面に対して平行であるときの状態である。図中の点線は車載カメラ11の最大垂直画角の範囲を表している。
【0032】
先ず、図7の(b)に示すように、前方車両が前方車両のタイヤの接地点より遠くを走行中であって前方車両のタイヤの接地点は車載カメラの最大画角にないとき、図2の(a)、(c)に示すように、自車両と前方車両の距離をx[mm]、車載カメラの最大画角に前方車両のタイヤの設置点と前方車両の走行中のタイヤの設置点との距離をx1[mm]、撮像センサの縦方向の半分の大きさをa、撮像センサの縦方向でタイヤ接地点と車載カメラの最大画角との間の大きさをa1、車載カメラのレンズ焦点距離をf[mm]、撮像センサ縦の半分に相当する線までの前方車両のタイヤからの高さをl、撮像センサの縦方向でタイヤ接地点と車載カメラの最大画角との間の高さをl1とする。ここで、撮像センサの縦方向の半分の大きさaは、例えば撮像センサのサイズが640×480画素であって1画素あたりの長さが0.006[mm]のセンサの場合、1.44[mm](=480×0.006/2[mm])となる。また、撮像センサの縦方向でタイヤ接地点と車載カメラの最大画角との間の大きさa1は、画素数が80であった場合0.48[mm](=80×0.006[mm])となる。また、撮像センサの縦方向の半分から前方車両のタイヤまでの大きさa2は、0.96[mm](=(240−80)×0.006[mm])となる。撮像センサの縦方向の半分の大きさの2/3が前方車両の車高の半分に相当することがわかる。そして、図8に示す走行中の前方車両の後方部を搭載カメラで撮影している全体の様子を横から見た図からわかるように、撮像センサ上の車両の横幅の半分の画素数b2に上記で求めた換算比から前方車両の車幅に相当するbの画素数を算出する。よって、撮像センサ縦の半分に相当する線までの前方車両のタイヤ接地位置を含む水平方向の幅yが換算できる。そして、上述したように、車載カメラの設置がやはり地面に対して平行なので画像の垂直方向の長さの半分はl(=1.35[m])である。以上のことから、車載カメラは水平方向で2y(=3600[mm])、垂直方向で2l(=2700[mm])の画像を撮影していることがわかる。これにより、前方車両が前方車両のタイヤの接地点より遠くを走行中であって前方車両のタイヤの接地点は車載カメラの最大画角にないときであっても、前方車両のタイヤの接地点は車載カメラの最大画角にあったときに置き換えて撮像センサ上の前方車両の車高や車幅を求めることができる。
【0033】
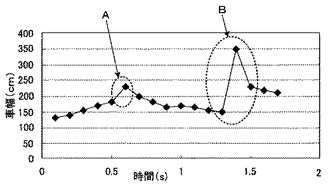
図9は前方車両の車幅の時間変化量を示す特性図である。同図に示すように、前方車両の車幅の時間変化量において、図中点線で囲んだAの0.5[s]〜0.6[s]に車幅の大きさの時間変化量が時間経過に対する一定基準を超えている。これは、自車両が前方車両に急接近している状況を示すものである。また、図中点線で囲んだBの1.3[s]〜1.5[s]に急に車幅が大きくなって、その後また急に小さくなっている。これは自車両と前方車両の間に他の車両が車線変更して割り込んで進入してきた状況を示すものである。つまり、割り込みが始まったとき、同一車線上の前方車両と割り込んで進入して来た他の車両とが重なりあって二台の車幅の合計値が一瞬一台の車幅と認識されて、一つの幅広の車両として急に車幅が大きくなったわけである。その後割り込んだ他の車両が自車両の前方に位置したことで、割り込んだ他の車両の車幅のみになったことで車幅が急に小さくなったのである。このような状況が発生した場合は、前方に他の車両が車線変更して来たと認識する。
【0034】
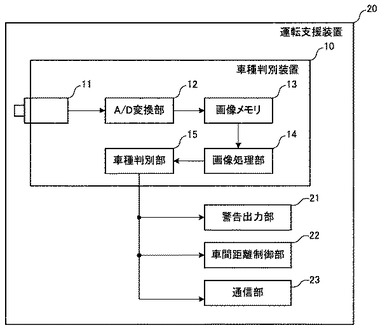
図10は本発明の一実施の形態に係る運転支援装置の構成を示すブロック図である。同図に示す本実施の形態の運転支援装置20は、図1の上記車種判別装置10を有し、更には、自車両の警告出力部21、車間距離制御部22及び通信部23を有している。上記車種判別装置10によって判別した車種の情報は警告出力部21、車間距離制御部22及び通信制御部23に供給される。そして、警告出力部21は供給された車種が例えば大型車であれば現在の車間距離が大型車に対する適正車間距離より短いときは運転手に十分な車間距離をとるように、あるいは上述のように他の車両が前方に割り込んで進入して来て車間距離が急に小さくなったために急制動するように、警告音や警告音声を出力したり警告メッセージをモニタしたり、あるいは警告灯を点灯して警告する。また、車間距離制御部22では、車間距離をとるために自動的に制動制御や速度制御を行う。更に、通信部23は、供給された車種情報を自車両の後方車両に送信する。よって、本発明の運転支援装置によれば、車種判別装置10によって判別された前方車両の車種に基づいて、簡単な構成で、かつ低コストで運転支援を行うことができる。
【0035】
以上説明したように、本実施の形態によれば、図1に示すように自車両の前方を走行している車両を撮影する車載カメラ11を自車両に搭載する。車載カメラ11で撮影した画像を画像メモリ12に記憶する。画像処理手段13は画像メモリに記憶した画像のうち前方車両の特長部位の画像を構成する画素数を計測する。そして、車種判別手段14は、計測した画素数と予め定めた閾値とを比較し、比較結果によって車種を判別する。本実施の形態では、図2に示すように、撮影した前方車両のタイヤの設置点が車載カメラの最大画角に一致したときの計測した画素数と閾値とを比較して車種判定を行っている。または、図7に示すように、撮影した前方車両のタイヤの設置点が車載カメラの最大画角に一致していないときであっても、このときに撮影した前方車両のタイヤの設置点を車載カメラの最大画角に換算してそのときの車高の画素数を求め、求めた画素数と上記閾値とを比較して車種を判別する。よって、簡単に、かつ低コストで前方車両の車種を判別することができる。
【0036】
また、前方車両の特長部位は、車幅、車高、タイヤ幅あるいはトレッドであってもよい。更に、画像処理手段は、上述したように、前方車両のタイヤの設置点が車載カメラの最大画角に一致したときの前方車両の特長部位の画素数を計測する。また、車載カメラの最大画角に車載カメラにおける前方車両のタイヤの設置点が一致していないとき、画像処理手段によって計測した前方車両の上記特長部位の画素数を、前方車両のタイヤの設置点が上記車載カメラの最大画角に一致させたときの前方車両の上記特長部位の画素数に換算する画素数換算手段を有し、上記車種判別手段では上記画素数換算手段によって換算した前方車両の上記特長部位の画素数と上記閾値とを比較して前方車両の車種を判別する。
【0037】
更に、閾値は、自車両と前方車両との車間距離が車種別適正車間距離となったときの車載カメラの撮像上での画素数である。また、車種判別手段は、前方車両の特長部位のうち複数の特長部位の画素数を画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別する。
【0038】
また、車種判別手段は、前方車両の特長部位のうち複数の特長部位の画素数を画像処理手段によって計測した各値又は画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別する。よって、判別精度が向上する。
【0039】
更に、図10に示すように、本実施の形態の運転支援装置20は、上記の車種判別装置10と、警告出力部21と、車間距離制御部22と、通信部23とを有している。このうち、車間距離制御手段22は、車種判別装置によって判別された結果の前方車両の車種に応じて自車両と前方車両との車間距離を制御する。詳細には、車種判別装置によって前方車両が例えば大型車であったとき大型車に対する適正車間距離とするために、車間距離制御手段22は速度制御手段による速度制御や制動制御手段による制動制御を行う。よって、運転支援を行い、運転手の負担を軽減する。また、警告出力手段21は、前方車両の車種情報に基づいて自車両の運転手に警告を出力し、危険状況を回避することができる。また、通信手段によって自車両の後方を走行している他の車両に前方車両の車種情報を送信することによって、自車両の死角となっている自車両の前方車両の車種を後方走行車両にも把握させて後方車両の運転も支援する。
【0040】
また、図9に示すように車種判別装置によって判別された前方車両の車幅の時間変化量を検出する車幅時間変化量検出手段を有し、この車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が一定基準を超えた場合は車間距離が小さくなったと認識して当該認識結果を基づく警告を警告出力手段によって運転手に出力する。よって、前方車両との車間距離が小さくなって追突の危険となったことを運転手に警告して事故を未然に防ぐことができる。更に、車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が急に大きくなった後急に小さくなった場合自車両の前方の他の車両が進入して来たと認識する。そして当該認識結果を基づく警告を上記警告出力手段によって運転手に出力する。よって、車線変更して割り込んでき進入して来た車両に急接近することを運転手に知らせて事故を未然に防ぐことができる。
【0041】
なお、本発明は上記実施の形態に限定されるものではなく、特許請求の範囲内の記載であれば多種の変形や置換、応用が可能である。
【符号の説明】
【0042】
10 車種判別装置
11 車載カメラ
12 A/D変換部
13 画像メモリ
14 画像処理部
15 車種判別部
20 運転支援装置
21 警告出力部
22 車間距離制御部
23 通信部
【先行技術文献】
【特許文献】
【0043】
【特許文献1】特開2009−075638号公報
【特許文献2】特開平08−233525号公報
【技術分野】
【0001】
本発明は、車種判別装置及び運転支援装置に関するものである。
【背景技術】
【0002】
現在、運転者の運転負荷を軽減するために運転支援を行う様々な車両の運転支援装置が開発されている。車両の運転支援装置の一つとして、前方車両に追従して走行するために前方車両との車間を制御するものがある。この車間制御を精度よく行うことは、前方走行中の車両の車種に応じた車間距離を保持することを法律(道路交通法の車間距離保持義務違反)でも義務づけられ、かつ安全上からも、重要となっている。この車間制御を精度よく行うためには前方走行中の車両の車種を判定することが要求される。前方車両の車種を判別する方法が従来よりいくつか提案されている。その一つとして、特許文献1には走行中の自車両から前方車両に向けて例えば電磁波を送信し、前方走行中の車両のフレーム(車軸を支持する車体シャーシの一部材)から反射してくる反射波を受信して、反射波から反射点を検知する。そして、特許文献1では、検知した反射点に基づいて前方車両のフレームの有無または形状を検出し、その検出結果により走行中の前方車両の車種を判別している。
【0003】
一方、特許文献2には、次のような車種判別装置が提案されている。この車種判別装置は、固定されたカメラを用いて設置前方又は下方を通過する車両の画像の時間変化量から車両のエッジを検出する。エッジを検出した期間に基づいて通過した車両の車高又は車幅を計測する。そして、計測した車幅又は車高に基づいて通過車両の車種を判別する。
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1はレーザレーダを用いているため、装置全体のコストが高くなるという問題がある。また、上記特許文献2は、カメラを用いて撮影した走行車両の画像を処理して車種判別を行う装置であり高精度の判別が可能であるが、カメラが固定されているために、配置された特定の場所でしか車種判別ができない。また、カメラを自車両に搭載して上記特許文献2の車種判別方法を適用して自車両の前方車両の車種を判別しようとした場合、自車両と前方車両が互いに走行しているのでカメラによって撮影した画像の時間変化量が極めて小さく、前方車両の2つのエッジを検出できたとしてもエッジ間の実長を計測できず、前方車両の車種は判別できない。
【0005】
本発明は以上の問題点に鑑みなされたものであり、その目的は、簡単に、かつ低コストに、自車両の前方を走行する車両の車種判別を行うことができる車種判別装置を実現することである。また、車種判別結果に基づいて運転者の支援を効果的に行うことができる運転支援装置を提供することである。
【課題を解決するための手段】
【0006】
請求項1の発明は、車両に搭載されて自車両の前方を走行する前方車両を判別する車種判別装置において、自車両に搭載され、自車両の前方車両を撮影する車載カメラと、撮影した画像を記憶する画像メモリと、撮影した前方車両の特長部位の画像を構成する画素数を計測する画像処理手段と、計測した画素数と予め定めた閾値とを比較し、前方車両の車種を判別する車種判別手段とを具備することを特徴とする車種判別装置である。
また、請求項2の発明は、請求項1記載の車種判別装置において、前方車両の上記特長部位は、車幅、車高、タイヤ幅あるいはトレッドであることを特徴とするものである。
更に、請求項3の発明は、請求項1又は2に記載の車種判別装置において、上記画像処理手段は、前方車両のタイヤの設置点が上記車載カメラの最大画角に一致したときの前方車両の上記特長部位の画素数を計測することを特徴とするものである。
また、請求項4の発明は、請求項1又は2に記載の車種判別装置において、上記車載カメラの最大画角に上記車載カメラにおける前方車両のタイヤの設置点が一致していないとき、上記画像処理手段によって計測した前方車両の上記特長部位の画素数を、前方車両のタイヤの設置点が上記車載カメラの最大画角に一致させたときの前方車両の上記特長部位の画素数に換算する画素数換算手段を有し、上記車種判別手段では上記画素数換算手段によって換算した前方車両の上記特長部位の画素数と上記閾値とを比較して前方車両の車種を判別することを特徴とするものである。
更に、請求項5の発明は、請求項1〜4のいずれか1項に記載の車種判別装置において、上記閾値は、自車両と前方車両との車間距離が車種別適正車間距離となったときの車載カメラの撮像上での画素数であることを特徴とするものである。
また、請求項6の発明は、請求項1〜5のいずれか1項に記載の車種判別装置において、上記車種判別手段は、前方車両の上記特長部位のうち複数の特長部位の画素数を上記画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別することを特徴とするものである。
更に、請求項7の発明は、請求項4記載の車種判別装置において、上記車種判別手段は、前方車両の上記特長部位のうち複数の特長部位の画素数を画像処理手段によって計測した各値又は上記画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別することを特徴とするものである。
また、請求項8の発明は、請求項1〜7のいずれか1項に記載の車種判別装置と、該車種判別装置によって判別された結果の前方車両の車種に応じて自車両と前方車両との車間距離を制御する車間距離制御手段とを具備することを特徴とする運転支援装置である。
更に、請求項9の発明は、請求項8記載の車種判別装置において、上記前方車両の車種情報に基づいて自車両の運転手に警告を出力する警告出力手段を有することを特徴とするものである。
また、請求項10の発明は、請求項8又は9に記載の運転支援装置において、上記車間距離制御手段は、自車両の走行速度を制御する速度制御手段と、自車両の制動を制御する制動制御手段とを有することを特徴とするものである。
更に、請求項11の発明は、請求項8〜10のいずれか1項に記載の運転支援装置において、自車両の後方を走行している他の車両に、前方車両の車種情報を送信する通信手段を有することを特徴とするものである。
また、請求項12の発明は、請求項8〜11のいずれか1項に記載の運転支援装置において、上記車種判別装置によって判別された前方車両の車幅の時間変化量を検出する車幅時間変化量検出手段を有することを特徴とするものである。
更に、請求項13の発明は、請求項9又は12に記載の運転支援装置において、上記車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が一定基準を超えた場合は車間距離が小さくなったと認識して当該認識結果を基づく警告を上記警告出力手段によって運転手に出力することを特徴とするものである。
また、請求項14の発明は、請求項9又は12に記載の運転支援装置において、上記車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が急に大きくなった後急に小さくなった場合自車両の前方の他の車両が進入して来たと認識して当該認識結果を基づく警告を上記警告出力手段によって運転手に出力することを特徴とするものである。
【発明の効果】
【0007】
以上、本発明によれば、簡単に、かつ低コストに、自車両の前方を走行する車両の種別判別を行うことができる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施の形態に係る車種判別装置の構成を示すブロック図である。
【図2】本発明の車種判別処理の原理を説明する図である。
【図3】本発明の車種判別処理の原理を説明する図である。
【図4】本発明の車種判別処理の原理を説明する図である。
【図5】自車両から前方車両を車載カメラで撮影した画像の図である。
【図6】本発明の車種判別処理動作を示すフローチャートである。
【図7】本発明の車種判別処理の原理を説明する図である。
【図8】本発明の車種判別処理の原理を説明する図である。
【図9】前方車両の車幅の時間変化量を示す特性図である。
【図10】本発明の一実施の形態に係る運転支援装置の構成を示すブロック図である。
【発明を実施するための形態】
【0009】
図1は本発明の一実施の形態に係る車種判別装置の構成を示すブロック図である。同図に示すように本実施の形態の車種判別装置10は、自車両に搭載された広角レンズを有し、自車両の前方を走行する前方車両を撮影する車載カメラ11と、車載カメラ11によって撮影されたアナログ画像信号をデジタル画像信号に変換するA/D変換部12と、変換後のデジタル画像信号の画像データを一時格納する画像メモリ13と、当該画像データに対して画像処理を施し、前方車両のトレッド(車軸の長さ)、車幅、車高、タイヤ幅などの車両特長部位の実長に対応する車載カメラにおける撮像画素数を計測する画像処理部14と、画像処理後の画素数の計測結果と予め定めた閾値とを比較し、例えば普通乗用車、中型車、大型車という車種を判別する車種判別部15とを具備している。
【0010】
このような構成を有する本実施の形態の車種判別装置10によれば、自車両に設置された広角レンズを有する車載カメラ11で前方車両を撮影し、撮影した画像のアナログ画像信号をA/D変換部12でデジタル画像信号に変換し画像メモリ13に記憶する。ただし、デジタル出力の車載カメラでも良いため、A/D変換がない構成でも可能である。画像処理部14は画像メモリ13に記憶された車載カメラ11で撮影した画像を画像処理することでトレッド、車幅、車高、タイヤ幅などを画素数で計測する。次に、車種判別部15では車種判別に用いる車種ごとのトレッド、車幅、車高、タイヤ幅の画素数の閾値と、画像処理部14で計測されたトレッド、車幅、車高、タイヤ幅などの画素数の計測結果とを比較する。その比較の結果により、例えば普通乗用車、中型車、大型車という車種を判別する。
【0011】
次に、本発明の車種判別処理の原理について図面を用いて概説する。
図2の(a)は走行中の前方車両の後方部を搭載カメラで撮影している全体の様子を横から見た図であり、同図の(b)は撮像素子上での画像を示す図である。また、同図の(c)は同図の(a)を模式した図である。更に、同図は前方車両の車高を計測する原理を示しており、同図は前方車両のタイヤの接地点が車載カメラの最大画角にあるときの図である。更に、車載カメラの設置位置に限定はなく、車両内部でも外部でもよい。また、設置角度にも限定はなく、自分の車の前方が良好に撮影されるように設置されていればよい。この例では車載カメラ11の光軸が地面に対して平行であるときの状態である。図中の点線は車載カメラ11の最大垂直画角の範囲を表している。
【0012】
先ず、図2の(b)に示すように前方車両のタイヤの接地点が車載カメラの最大画角にあるとき、図2の(c)に示すように自車両と前方車両の距離をx[mm]、撮像センサの縦方向の半分の大きさをa、車載カメラのレンズ焦点距離をf[mm]、撮像センサ縦の半分に相当する線までの前方車両のタイヤからの高さをlとする。ここで、撮像センサの縦方向の半分の大きさaは、例えば撮像センサのサイズが640×480画素であって1画素あたりの長さが0.006[mm]のセンサの場合、1.44[mm](=480×0.006/2[mm])となる。また、fは車載カメラのレンズ焦点距離であるので既知であるので、例えばfを2.8とする。lはカメラを地面から何mm離して設置したかによって決まるのでやはり既知である。例えばlを1.35[m]とする。よって、自車両と前方車両の距離xは、a:f=l:xの関係から求まり、上記したa,f,lの既知の値により、x=2625[mm](=2.625[m])となる。
【0013】
図3の(a)は走行中の前方車両を車載カメラで撮影している全体の様子を上から見た図であり、同図の(b)は同図の(b)を模式した図である。上述したように、自車両と前方車両との車間距離xを求めた後、図2の(b)に示すように前方車両のタイヤの接地点が車載カメラの最大画角にあるとき、自車両と前方車両の距離をx[mm]、撮像センサの横方向の半分の大きさをb、車載カメラのレンズ焦点距離をf[mm]、撮像センサ縦の半分に相当する線までの前方車両のタイヤ接地位置を含む水平方向の幅をyとする。ここで、撮像センサの横方向の半分の大きさbは、例えば撮像センサのサイズが640×480画素であって1画素あたりの長さが0.006mmのセンサの場合、1.92mm(=640×0.006/2mm)となる。また、fは車載カメラのレンズ焦点距離であるので既知であるので、例えばfを2.8とする。xが上述のように求められているので、yはb:f=y:xの関係から求まることになる。そして、当該関係式と上記したa,f,xの値とにより、y=1800[mm](=1.8[m])となる。また、上述したように、車載カメラの設置が地面に対して平行なので画像の垂直方向の長さの半分はl(=1.35[m])である。以上のことから、車載カメラは水平方向で2y(=3600[mm])、垂直方向で2l(=2700[mm])の画像を撮影していることがわかる。
【0014】
次に、撮像センサ上に撮影されている画像の高さや幅と撮像センサ上の画素数の関係がわかるため、画素数から実際に撮影している画像、つまり自車両の前方を走行している車両の車幅、車高を求めることができる。この原理を図4を用いて説明すると、同図中のwは前方車両の車幅であり、hは前方車両の車高である。ここで、2yと2lは上述したように求められている。2lの高さに相当する垂直方向の画素数が480なので、2l:480=h:pとなる。この関係から、pが求められる。
【0015】
例えば前方車両が中型車であるとすれば、画素数pが中型車の車高を表す最大画素数であり、画像中の前方車両の車幅の画素数がpを超えた場合には前方車両は大型車であると判別できる。よって、このpは前方車両が大型車であることを判別するための閾値であることになる。以上の方法により、車高と同様に、車幅w、タイヤ幅、トレッド幅などの大型車判別用の各閾値を求めることができる。
【0016】
なお、本実施の形態の車種判別方法における前方車両の車種判別は、細分化の車種判別を行いたいのか、単に大型車であるか否かの判定をしたいのかなど、目的に応じて車高、車幅、トレッド、タイヤ幅の情報が全て必要なのか、一つだけで構わないのかを決めることが可能である。例では、車高の値のみを利用して、車種判別をおおまかに、普通車、中型車、大型車と分けるときについて説明する。
【0017】
以下の表1に、普通車、中型車、大型車の車高を表中の数値で設定したときの、車高の閾値を例として示した。これらの閾値は事象データとして記憶テーブルに記憶されている。このように、画素数での閾値は、法上の車種に応じた車間距離に対応する値としたが、任意に設定可能である。
【0018】
【表1】
【0019】
図5は自車両から前方車両を車載カメラで撮影した画像の図である。つまり、前方車両の後方が画面には映っている。同図の(a)は自車両と前方車両との車間距離が長いときの画像である。同図の(b)は自車両と前方車両との車間距離が小さくなったときの画像である。同図の(c)は自車両と前方車両との車間距離が同図の(b)の距離よりも更に小さくなったときの画像である。同図において、haは各画像に映っている車両の車高部分を画素数で表したものである。よって、前方車両が自車両に近くなればなるほどhaは大きくなる。また、h1は普通車が自車両に最も近づいたときの車高を画素数で表し、h2は中型車が自車両に最も近づいたときの車高を画素数で表した値である。また、図中には示されていないが、h3は大型車が自車両に最も近づいた時の車高を画素数で表した値である。これらのh1、h2、h3は、任意に設定可能であり、例えば車種別の適正距離になったときの画素数としてもよい値である。上記表1を例とすると、h1が240、h2が320、h3が462である。もし、前方車両が中型車ではなく普通車であった場合、普通車がどんなに自車両に近づいたとしてもh1よりも大きな値をとることはない。図5のときのha,h1,h2,h3の関係と判定結果を下記の表2に示す。
【0020】
【表2】
【0021】
例えば、上記の画素数によって、自分の車の前方を走行している大型車が死角状況を写したカメラ画像を常に発信している状態のときに、自分の車から大型車が遠い距離にいるときには画像を受信しないように制御し、接近したときのみ大型車のカメラ画像を受信し、近づきすぎたら画像の受信を中止し、車間制御することが表3に示したように可能である。
【0022】
【表3】
【0023】
次に、上述した車高計測だけではなく、車幅、タイヤ幅、トレッドなどの閾値を組み合わせた車種判別処理方法について動作フローの一例を示す図6に従って概説する。
先ず、図1の車載カメラ11によって撮影された前方車両の画像が画像メモリ12に記憶し(ステップS101)、前方車両のタイヤ幅、トレッド、車高、車幅を上述した方法に基づいて検出する(ステップS102)。続いて、画像中の前方車両のタイヤ幅の画素数を予め求められている普通乗用車のタイヤ幅の閾値と比較する(ステップS103)。超えていたら、中型車のタイヤ幅の閾値と比較する(ステップS103;YES、ステップS104)。そして、中型車のタイヤ幅の閾値も越えていたら大型車であると判定する(ステップS104;YES、ステップS105)。
【0024】
そして、ステップS103で、画像中の前方車両のタイヤ幅の画素数が予め求められている普通乗用車のタイヤ幅の閾値を超えていない場合は、画像中の前方車両のトレッドの画素数と予め求められている普通乗用車のトレッドの閾値と比較する(ステップS103;NO、ステップS106)。超えていたら、またステップS104で画像中の前方車両のタイヤ幅の画素数が中型車のタイヤ幅の閾値を超えていない場合、中型車のトレッドの閾値と比較する(ステップS104;NO、ステップS106;YES、ステップS107)。そして、中型車のトレッドの閾値も越えていたら大型車であると判定する(ステップS107;YES、ステップS105)。
【0025】
また、ステップS106で、画像中の前方車両のトレッドの画素数が予め求められている普通乗用車のトレッドの閾値を超えていない場合は、画像中の前方車両の車高の画素数と予め求められている普通乗用車の車高の閾値と比較する(ステップS106;NO、ステップS108)。超えていたら、またステップS107で画像中の前方車両のトレッドの画素数が中型車のトレッドの閾値を超えていない場合、中型車の車高の閾値と比較する(ステップS107;NO、ステップS108;YES、ステップS109)。そして、中型車の車高の閾値も越えていたら大型車であると判定する(ステップS109;YES、ステップS105)。
【0026】
更に、ステップS108で、画像中の前方車両の車高の画素数が予め求められている普通乗用車の車高の閾値を超えていない場合は、画像中の前方車両の車幅の画素数と予め求められている普通乗用車の車幅の閾値と比較する(ステップS108;NO、ステップS110)。超えていたら、またステップS109で画像中の前方車両の車高の画素数が中型車の車高の閾値を超えていない場合、中型車の車幅の閾値と比較する(ステップS109;NO、ステップS110;YES、ステップS111)。そして、中型車の車幅の閾値も越えていたら大型車であると判定する(ステップS111;YES、ステップS105)。
【0027】
そして、ステップS110で、画像中の前方車両の車幅の画素数が予め求められている普通乗用車の車幅の閾値を超えていない場合は、前方車両のタイヤの接地点が撮像センサの最大画角にあるか否かを判定する(ステップS110;NO、ステップS112)。判定した結果、前方車両のタイヤの接地点が撮像センサの最大画角にあれば、前方車両が一番大きく見えている状態なので各項目で閾値を超えることはないので前方車両は普通乗用車であると判定する(ステップS112;YES、ステップS113)。
【0028】
一方、前方車両のタイヤの接地点が撮像センサの最大画角になければ、自車両と前方車両の車間距離が長く、判定不能であるとし(ステップS114)、ステップS101に戻る。また、ステップS111で、画像中の前方車両の車幅の画素数が予め求められている中型車の車幅の閾値を超えていない場合でも、前方車両のタイヤの接地点が撮像センサの最大画角にあるか否かを判定する(ステップS111;NO、ステップS115)。判定した結果、前方車両のタイヤの接地点が撮像センサの最大画角にあれば、前方車両は中型車であると判定する(ステップS115;YES、ステップS116)。一方、前方車両のタイヤの接地点が撮像センサの最大画角になければ、前方車両は中型車あるいは大型車のいずれかであるが、この場合車間距離が長く判定不能とし(ステップS115;NO、ステップS117)、ステップS101に戻る。
【0029】
なお、普通乗用車、中型車、大型車というような大きく三種類に判別するのではなく、より細かく前方車両の車種を判別したいときには、上述した画像処理にナンバープレート認識を組み合わせると細かく車種判別が可能である。また、図6に示す動作フロー判別の順番は限定するのものではない。判別したい車種の特長を見極め、閾値を利用して処理速度が速いようなシステムを作ることができる。更に、判定項目も限定する必要はない。車幅に対する車高の比が1以下か1未満かという項目を作る例も考えられる。判別したい大型車の大部分が車幅を1としたときの車高が1以上であるという特長があれば、このような車幅に対する車高の比という車種判別項目を追加することで大型車であると判別する時間が短くなる。
【0030】
上述した実施の形態における車種判別処理の原理では、撮影した前方車両のタイヤの接地点が車載カメラの最大画角にあるときを前提としていたが、この場合で当該前提となるために車載カメラの最大画角に前方車両のタイヤの接地点が一致するまで処理できないということになる。そこで、車載カメラの最大画角に前方車両のタイヤの接地点が一致していない状況であっても車種判別処理ができる実施の形態について以下に説明する。
【0031】
図7の(a)は走行中の前方車両の後方部を搭載カメラで撮影している全体の様子を横から見た図であり、同図の(b)は撮像素子上での画像を示す図である。また、同図の(c)は同図の(a)を模式した図である。更に、この例でも車載カメラ11の光軸が地面に対して平行であるときの状態である。図中の点線は車載カメラ11の最大垂直画角の範囲を表している。
【0032】
先ず、図7の(b)に示すように、前方車両が前方車両のタイヤの接地点より遠くを走行中であって前方車両のタイヤの接地点は車載カメラの最大画角にないとき、図2の(a)、(c)に示すように、自車両と前方車両の距離をx[mm]、車載カメラの最大画角に前方車両のタイヤの設置点と前方車両の走行中のタイヤの設置点との距離をx1[mm]、撮像センサの縦方向の半分の大きさをa、撮像センサの縦方向でタイヤ接地点と車載カメラの最大画角との間の大きさをa1、車載カメラのレンズ焦点距離をf[mm]、撮像センサ縦の半分に相当する線までの前方車両のタイヤからの高さをl、撮像センサの縦方向でタイヤ接地点と車載カメラの最大画角との間の高さをl1とする。ここで、撮像センサの縦方向の半分の大きさaは、例えば撮像センサのサイズが640×480画素であって1画素あたりの長さが0.006[mm]のセンサの場合、1.44[mm](=480×0.006/2[mm])となる。また、撮像センサの縦方向でタイヤ接地点と車載カメラの最大画角との間の大きさa1は、画素数が80であった場合0.48[mm](=80×0.006[mm])となる。また、撮像センサの縦方向の半分から前方車両のタイヤまでの大きさa2は、0.96[mm](=(240−80)×0.006[mm])となる。撮像センサの縦方向の半分の大きさの2/3が前方車両の車高の半分に相当することがわかる。そして、図8に示す走行中の前方車両の後方部を搭載カメラで撮影している全体の様子を横から見た図からわかるように、撮像センサ上の車両の横幅の半分の画素数b2に上記で求めた換算比から前方車両の車幅に相当するbの画素数を算出する。よって、撮像センサ縦の半分に相当する線までの前方車両のタイヤ接地位置を含む水平方向の幅yが換算できる。そして、上述したように、車載カメラの設置がやはり地面に対して平行なので画像の垂直方向の長さの半分はl(=1.35[m])である。以上のことから、車載カメラは水平方向で2y(=3600[mm])、垂直方向で2l(=2700[mm])の画像を撮影していることがわかる。これにより、前方車両が前方車両のタイヤの接地点より遠くを走行中であって前方車両のタイヤの接地点は車載カメラの最大画角にないときであっても、前方車両のタイヤの接地点は車載カメラの最大画角にあったときに置き換えて撮像センサ上の前方車両の車高や車幅を求めることができる。
【0033】
図9は前方車両の車幅の時間変化量を示す特性図である。同図に示すように、前方車両の車幅の時間変化量において、図中点線で囲んだAの0.5[s]〜0.6[s]に車幅の大きさの時間変化量が時間経過に対する一定基準を超えている。これは、自車両が前方車両に急接近している状況を示すものである。また、図中点線で囲んだBの1.3[s]〜1.5[s]に急に車幅が大きくなって、その後また急に小さくなっている。これは自車両と前方車両の間に他の車両が車線変更して割り込んで進入してきた状況を示すものである。つまり、割り込みが始まったとき、同一車線上の前方車両と割り込んで進入して来た他の車両とが重なりあって二台の車幅の合計値が一瞬一台の車幅と認識されて、一つの幅広の車両として急に車幅が大きくなったわけである。その後割り込んだ他の車両が自車両の前方に位置したことで、割り込んだ他の車両の車幅のみになったことで車幅が急に小さくなったのである。このような状況が発生した場合は、前方に他の車両が車線変更して来たと認識する。
【0034】
図10は本発明の一実施の形態に係る運転支援装置の構成を示すブロック図である。同図に示す本実施の形態の運転支援装置20は、図1の上記車種判別装置10を有し、更には、自車両の警告出力部21、車間距離制御部22及び通信部23を有している。上記車種判別装置10によって判別した車種の情報は警告出力部21、車間距離制御部22及び通信制御部23に供給される。そして、警告出力部21は供給された車種が例えば大型車であれば現在の車間距離が大型車に対する適正車間距離より短いときは運転手に十分な車間距離をとるように、あるいは上述のように他の車両が前方に割り込んで進入して来て車間距離が急に小さくなったために急制動するように、警告音や警告音声を出力したり警告メッセージをモニタしたり、あるいは警告灯を点灯して警告する。また、車間距離制御部22では、車間距離をとるために自動的に制動制御や速度制御を行う。更に、通信部23は、供給された車種情報を自車両の後方車両に送信する。よって、本発明の運転支援装置によれば、車種判別装置10によって判別された前方車両の車種に基づいて、簡単な構成で、かつ低コストで運転支援を行うことができる。
【0035】
以上説明したように、本実施の形態によれば、図1に示すように自車両の前方を走行している車両を撮影する車載カメラ11を自車両に搭載する。車載カメラ11で撮影した画像を画像メモリ12に記憶する。画像処理手段13は画像メモリに記憶した画像のうち前方車両の特長部位の画像を構成する画素数を計測する。そして、車種判別手段14は、計測した画素数と予め定めた閾値とを比較し、比較結果によって車種を判別する。本実施の形態では、図2に示すように、撮影した前方車両のタイヤの設置点が車載カメラの最大画角に一致したときの計測した画素数と閾値とを比較して車種判定を行っている。または、図7に示すように、撮影した前方車両のタイヤの設置点が車載カメラの最大画角に一致していないときであっても、このときに撮影した前方車両のタイヤの設置点を車載カメラの最大画角に換算してそのときの車高の画素数を求め、求めた画素数と上記閾値とを比較して車種を判別する。よって、簡単に、かつ低コストで前方車両の車種を判別することができる。
【0036】
また、前方車両の特長部位は、車幅、車高、タイヤ幅あるいはトレッドであってもよい。更に、画像処理手段は、上述したように、前方車両のタイヤの設置点が車載カメラの最大画角に一致したときの前方車両の特長部位の画素数を計測する。また、車載カメラの最大画角に車載カメラにおける前方車両のタイヤの設置点が一致していないとき、画像処理手段によって計測した前方車両の上記特長部位の画素数を、前方車両のタイヤの設置点が上記車載カメラの最大画角に一致させたときの前方車両の上記特長部位の画素数に換算する画素数換算手段を有し、上記車種判別手段では上記画素数換算手段によって換算した前方車両の上記特長部位の画素数と上記閾値とを比較して前方車両の車種を判別する。
【0037】
更に、閾値は、自車両と前方車両との車間距離が車種別適正車間距離となったときの車載カメラの撮像上での画素数である。また、車種判別手段は、前方車両の特長部位のうち複数の特長部位の画素数を画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別する。
【0038】
また、車種判別手段は、前方車両の特長部位のうち複数の特長部位の画素数を画像処理手段によって計測した各値又は画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別する。よって、判別精度が向上する。
【0039】
更に、図10に示すように、本実施の形態の運転支援装置20は、上記の車種判別装置10と、警告出力部21と、車間距離制御部22と、通信部23とを有している。このうち、車間距離制御手段22は、車種判別装置によって判別された結果の前方車両の車種に応じて自車両と前方車両との車間距離を制御する。詳細には、車種判別装置によって前方車両が例えば大型車であったとき大型車に対する適正車間距離とするために、車間距離制御手段22は速度制御手段による速度制御や制動制御手段による制動制御を行う。よって、運転支援を行い、運転手の負担を軽減する。また、警告出力手段21は、前方車両の車種情報に基づいて自車両の運転手に警告を出力し、危険状況を回避することができる。また、通信手段によって自車両の後方を走行している他の車両に前方車両の車種情報を送信することによって、自車両の死角となっている自車両の前方車両の車種を後方走行車両にも把握させて後方車両の運転も支援する。
【0040】
また、図9に示すように車種判別装置によって判別された前方車両の車幅の時間変化量を検出する車幅時間変化量検出手段を有し、この車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が一定基準を超えた場合は車間距離が小さくなったと認識して当該認識結果を基づく警告を警告出力手段によって運転手に出力する。よって、前方車両との車間距離が小さくなって追突の危険となったことを運転手に警告して事故を未然に防ぐことができる。更に、車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が急に大きくなった後急に小さくなった場合自車両の前方の他の車両が進入して来たと認識する。そして当該認識結果を基づく警告を上記警告出力手段によって運転手に出力する。よって、車線変更して割り込んでき進入して来た車両に急接近することを運転手に知らせて事故を未然に防ぐことができる。
【0041】
なお、本発明は上記実施の形態に限定されるものではなく、特許請求の範囲内の記載であれば多種の変形や置換、応用が可能である。
【符号の説明】
【0042】
10 車種判別装置
11 車載カメラ
12 A/D変換部
13 画像メモリ
14 画像処理部
15 車種判別部
20 運転支援装置
21 警告出力部
22 車間距離制御部
23 通信部
【先行技術文献】
【特許文献】
【0043】
【特許文献1】特開2009−075638号公報
【特許文献2】特開平08−233525号公報
【特許請求の範囲】
【請求項1】
車両に搭載されて自車両の前方を走行する前方車両を判別する車種判別装置において、
自車両に搭載され、自車両の前方車両を撮影する車載カメラと、
撮影した画像を記憶する画像メモリと、
撮影した前方車両の特長部位の画像を構成する画素数を計測する画像処理手段と、
計測した画素数と予め定めた閾値とを比較し、前方車両の車種を判別する車種判別手段と
を具備することを特徴とする車種判別装置。
【請求項2】
請求項1記載の車種判別装置において、
前方車両の上記特長部位は、車幅、車高、タイヤ幅あるいはトレッドであることを特徴とする車種判別装置。
【請求項3】
請求項1又は2に記載の車種判別装置において、
上記画像処理手段は、前方車両のタイヤの設置点が上記車載カメラの最大画角に一致したときの前方車両の上記特長部位の画素数を計測することを特徴とする車種判別装置。
【請求項4】
請求項1又は2に記載の車種判別装置において、
上記車載カメラの最大画角に上記車載カメラにおける前方車両のタイヤの設置点が一致していないとき、上記画像処理手段によって計測した前方車両の上記特長部位の画素数を、前方車両のタイヤの設置点が上記車載カメラの最大画角に一致させたときの前方車両の上記特長部位の画素数に換算する画素数換算手段を有し、上記車種判別手段では上記画素数換算手段によって換算した前方車両の上記特長部位の画素数と上記閾値とを比較して前方車両の車種を判別することを特徴とする車種判別装置。
【請求項5】
請求項1〜4のいずれか1項に記載の車種判別装置において、
上記閾値は、自車両と前方車両との車間距離が車種別適正車間距離となったときの車載カメラの撮像上での画素数であることを特徴とする車種判別装置。
【請求項6】
請求項1〜5のいずれか1項に記載の車種判別装置において、
上記車種判別手段は、前方車両の上記特長部位のうち複数の特長部位の画素数を上記画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別することを特徴とする車種判別装置。
【請求項7】
請求項4記載の車種判別装置において、
上記車種判別手段は、前方車両の上記特長部位のうち複数の特長部位の画素数を上記画像処理手段によって計測した各値又は上記画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別することを特徴とする車種判別装置。
【請求項8】
請求項1〜7のいずれか1項に記載の車種判別装置と、
該車種判別装置によって判別された結果の前方車両の車種に応じて自車両と前方車両との車間距離を制御する車間距離制御手段と
を具備することを特徴とする運転支援装置。
【請求項9】
請求項8記載の車種判別装置において、
上記前方車両の車種情報に基づいて自車両の運転手に警告を出力する警告出力手段を有することを特徴とする運転支援装置。
【請求項10】
請求項8又は9に記載の運転支援装置において、
上記車間距離制御手段は、自車両の走行速度を制御する速度制御手段と、自車両の制動を制御する制動制御手段とを有することを特徴とする運転支援装置。
【請求項11】
請求項8〜10のいずれか1項に記載の運転支援装置において、
自車両の後方を走行している他の車両に、前方車両の車種情報を送信する通信手段を有することを特徴とする運転支援装置。
【請求項12】
請求項8〜11のいずれか1項に記載の運転支援装置において、
上記車種判別装置によって判別された前方車両の車幅の時間変化量を検出する車幅時間変化量検出手段を有することを特徴とする運転支援装置。
【請求項13】
請求項9又は12に記載の運転支援装置において、
上記車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が一定基準を超えた場合は車間距離が小さくなったと認識して当該認識結果を基づく警告を上記警告出力手段によって運転手に出力することを特徴とする運転支援装置。
【請求項14】
請求項9又は12に記載の運転支援装置において、
上記車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が急に大きくなった後急に小さくなった場合自車両の前方の他の車両が進入して来たと認識して当該認識結果を基づく警告を上記警告出力手段によって運転手に出力することを特徴とする運転支援装置。
【請求項1】
車両に搭載されて自車両の前方を走行する前方車両を判別する車種判別装置において、
自車両に搭載され、自車両の前方車両を撮影する車載カメラと、
撮影した画像を記憶する画像メモリと、
撮影した前方車両の特長部位の画像を構成する画素数を計測する画像処理手段と、
計測した画素数と予め定めた閾値とを比較し、前方車両の車種を判別する車種判別手段と
を具備することを特徴とする車種判別装置。
【請求項2】
請求項1記載の車種判別装置において、
前方車両の上記特長部位は、車幅、車高、タイヤ幅あるいはトレッドであることを特徴とする車種判別装置。
【請求項3】
請求項1又は2に記載の車種判別装置において、
上記画像処理手段は、前方車両のタイヤの設置点が上記車載カメラの最大画角に一致したときの前方車両の上記特長部位の画素数を計測することを特徴とする車種判別装置。
【請求項4】
請求項1又は2に記載の車種判別装置において、
上記車載カメラの最大画角に上記車載カメラにおける前方車両のタイヤの設置点が一致していないとき、上記画像処理手段によって計測した前方車両の上記特長部位の画素数を、前方車両のタイヤの設置点が上記車載カメラの最大画角に一致させたときの前方車両の上記特長部位の画素数に換算する画素数換算手段を有し、上記車種判別手段では上記画素数換算手段によって換算した前方車両の上記特長部位の画素数と上記閾値とを比較して前方車両の車種を判別することを特徴とする車種判別装置。
【請求項5】
請求項1〜4のいずれか1項に記載の車種判別装置において、
上記閾値は、自車両と前方車両との車間距離が車種別適正車間距離となったときの車載カメラの撮像上での画素数であることを特徴とする車種判別装置。
【請求項6】
請求項1〜5のいずれか1項に記載の車種判別装置において、
上記車種判別手段は、前方車両の上記特長部位のうち複数の特長部位の画素数を上記画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別することを特徴とする車種判別装置。
【請求項7】
請求項4記載の車種判別装置において、
上記車種判別手段は、前方車両の上記特長部位のうち複数の特長部位の画素数を上記画像処理手段によって計測した各値又は上記画素数換算手段によって換算した各値と予め定めた各閾値とを比較して各比較結果に基づいて前方車両の車種を判別することを特徴とする車種判別装置。
【請求項8】
請求項1〜7のいずれか1項に記載の車種判別装置と、
該車種判別装置によって判別された結果の前方車両の車種に応じて自車両と前方車両との車間距離を制御する車間距離制御手段と
を具備することを特徴とする運転支援装置。
【請求項9】
請求項8記載の車種判別装置において、
上記前方車両の車種情報に基づいて自車両の運転手に警告を出力する警告出力手段を有することを特徴とする運転支援装置。
【請求項10】
請求項8又は9に記載の運転支援装置において、
上記車間距離制御手段は、自車両の走行速度を制御する速度制御手段と、自車両の制動を制御する制動制御手段とを有することを特徴とする運転支援装置。
【請求項11】
請求項8〜10のいずれか1項に記載の運転支援装置において、
自車両の後方を走行している他の車両に、前方車両の車種情報を送信する通信手段を有することを特徴とする運転支援装置。
【請求項12】
請求項8〜11のいずれか1項に記載の運転支援装置において、
上記車種判別装置によって判別された前方車両の車幅の時間変化量を検出する車幅時間変化量検出手段を有することを特徴とする運転支援装置。
【請求項13】
請求項9又は12に記載の運転支援装置において、
上記車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が一定基準を超えた場合は車間距離が小さくなったと認識して当該認識結果を基づく警告を上記警告出力手段によって運転手に出力することを特徴とする運転支援装置。
【請求項14】
請求項9又は12に記載の運転支援装置において、
上記車幅時間変化量検出手段によって検出している前方車両の車幅の時間変化量が急に大きくなった後急に小さくなった場合自車両の前方の他の車両が進入して来たと認識して当該認識結果を基づく警告を上記警告出力手段によって運転手に出力することを特徴とする運転支援装置。
【図1】

【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−180934(P2011−180934A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−46088(P2010−46088)
【出願日】平成22年3月3日(2010.3.3)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年3月3日(2010.3.3)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]