
車線変更支援装置
【課題】より安全性の高いECOモード走行時の車線変更を実現する。
【解決手段】ECOモード走行中において、隣接車線に後続車両22が確認される場合に車線変更する際、後続車両22との車間距離が車線変更判断距離L以上であればECOモードを解除することでスムーズな車線変更を可能とし、また、車線変更判断距離L未満であれば警報により運転者に車線変更の先送りを促すことで、より安全性の高いECOモード走行時の車線変更を実現する。
【解決手段】ECOモード走行中において、隣接車線に後続車両22が確認される場合に車線変更する際、後続車両22との車間距離が車線変更判断距離L以上であればECOモードを解除することでスムーズな車線変更を可能とし、また、車線変更判断距離L未満であれば警報により運転者に車線変更の先送りを促すことで、より安全性の高いECOモード走行時の車線変更を実現する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は省燃費機能作動走行時の車線変更を支援する車線変更支援装置に関する。
【背景技術】
【0002】
従来技術として、走行中の燃費を抑制するため、トランスミッションを制御して早めのシフトアップを行ったり、エンジンを制御してバルブ開度の抑制や気筒の休筒を行ったり、また、ハイブリッド車においては走行モード制御により電気走行やハイブリッド走行に切り替えたりする、省燃費機能作動が知られている。
【0003】
省燃費機能作動走行は、その性質上加減速が緩やかであるため、車線変更をする際、隣接する車線の後続車両との車間距離によっては衝突可能性が生じる場合がある。
【0004】
その対策として、車線変更時に運転者が省燃費機能作動を手動で解除できるようにする装置が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特表2009‐533270号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述の装置では、省燃費機能作動の解除及び車線変更可否の判断は運転者に委ねられており、運転者が判断を誤ってしまう状況も想定されることから、スムーズな車線変更が必ずしもできるわけではなく、後続車両との衝突可能性は依然として存在する。
【0007】
そこで本発明は、上述の問題点を解消し、より安全性の高い車線変更の支援を行うことを目的とするものである。
【課題を解決するための手段】
【0008】
上記課題を解決する第1の発明に係る車線変更支援装置は、
省燃費機能作動走行中において、隣接車線に後続車両が確認される場合に、運転者に車線変更の意図がある旨の情報が入力されると、前記後続車両との車間距離が車線変更の可否を判断する際の基準となる車線変更判断距離以上か否かを判断し、前記車線変更判断距離以上であれば、省燃費機能作動を解除する判断を行う機能を設ける車線変更判断部と、
前記車線変更判断部の判断を基に前記省燃費機能作動走行または通常走行に制御する車両制御部とを備えることを特徴とする。
【0009】
上記課題を解決する第2の発明に係る車線変更支援装置は、
上記第1の発明に係る車線変更支援装置において、
前記車線変更判断部は、車線変更完了の情報が入力されると、前記省燃費機能作動に復帰する判断を行うことを特徴とする。
【0010】
上記課題を解決する第3の発明に係る車線変更支援装置は、
上記第1または2の発明に係る車線変更支援装置において、
前記車線変更判断部が前記後続車両との車間距離は前記車線変更判断距離未満であると判断した場合に、警報により車線変更の先送りを前記運転者に促す情報提供部を備えることを特徴とする。
【0011】
上記課題を解決する第4の発明に係る車線変更支援装置は、
上記第1乃至3いずれか1つの発明に係る車線変更支援装置において、
自車両後側方を監視する車両後側方監視部と、
前記運転者の車線変更の意図または車線変更完了を、方向指示器操作部の動作及びハンドル部の角度から検出する運転操作検出部と、
前記車両後側方監視部から入力された情報を基に、前記後続車両との車間距離を算出する他車両情報算出部と、
前記他車両情報算出部で算出された結果を記憶及び更新する他車両情報記憶部とを備え、
前記車線変更判断部は、前記他車両情報算出部、前記他車両情報記憶部及び前記運転操作検出部から入力された情報を基に作動することを特徴とする。
【発明の効果】
【0012】
上記第1の発明に係る車線変更支援装置によれば、車線変更時に省燃費機能作動解除を行い通常走行に切り替えることで、スムーズな車線変更や合流を実現できる。
【0013】
上記第2の発明に係る車線変更支援装置によれば、車線変更完了後に自動で省燃費機能作動を復帰することで、車線変更完了の度に手動で省燃費機能作動を復帰させる手間が省ける。
【0014】
上記第3の発明に係る車線変更支援装置によれば、車線変更不可の場合、警報により車線変更の先送りを運転者に促すことで、後続車両との衝突危険性を低減することができる。
【0015】
上記第4の発明に係る車線変更支援装置によれば、他車両情報算出部、他車両情報記憶部及び運転操作設定部から入力した情報を基に、車線変更判断部において車線変更の可否を判断することができる。
【図面の簡単な説明】
【0016】
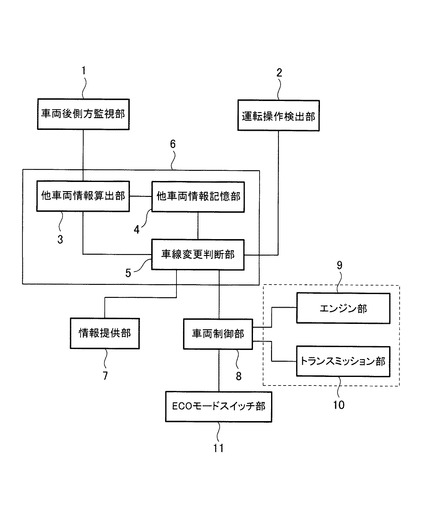
【図1】本発明の実施例1に係る車線変更支援装置の構成図である。
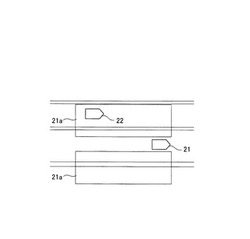
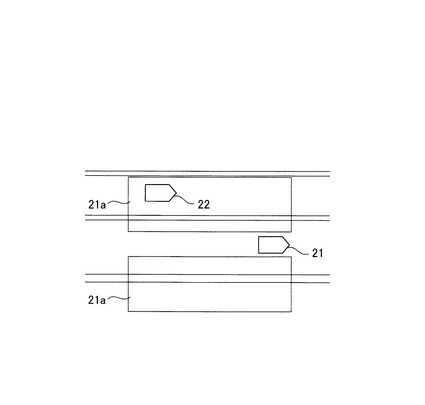
【図2】本発明の実施例1に係る、車両後側方監視部により自車両後側方を監視している状態を示した概略図である。
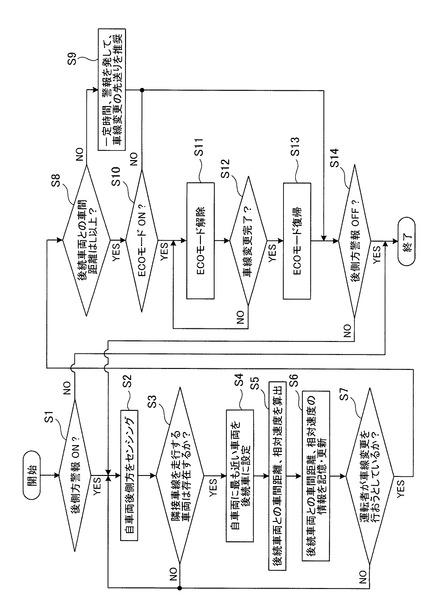
【図3】本発明の実施例1に係る車線変更支援装置動作のフローチャートである。
【図4】本発明の実施例1に係る、後続車両の車線変更判断距離と相対速度の関係を示すグラフである。
【発明を実施するための形態】
【0017】
以下、本発明に係る車線変更支援装置を実施例にて図面を用いて説明する。
【実施例1】
【0018】
本発明の実施例1に係る装置について図1を用いて説明する。本装置は、車両後側方監視部1、運転操作検出部2、他車両情報算出部3、他車両情報記憶部4、車線変更判断部5、情報提供部7及び車両制御部8を備える。また、他車両情報算出部3、他車両情報記憶部4及び車線変更判断部5は、ECU(Electronic Controlled Unit:電子制御装置)6内に設けられている。
【0019】
上述の車両後側方監視部1は、後側方警報装置をONとすると、図2の後側方監視範囲21aのように自車両21の後側方の状況をセンサにより監視し、当該情報を他車両情報算出部3へ出力する。上述の後側方警報装置とは、自車両の後側方の状況をセンサで監視し、後側方に車両が存在する場合はドアミラーに設置したLEDが点灯し、さらにその状態で車線変更しようとすると、音で警報を発する装置である。
【0020】
上述の運転操作検出部2は、運転者の車線変更の意図を、方向指示器操作部の動作及びハンドル部の角度から検出し、当該検出情報を車線変更判断部5へ出力する。また、車線変更完了時においても、方向指示器操作部の動作及びハンドル部の角度から車線変更完了を検出し、当該検出情報を車線変更判断部5へ出力する。
【0021】
上述の他車両情報算出部3は、車両後側方監視部1から入力した情報を基に、隣接車線の中で最も自車両21から近い後側方にある車両を後続車両22として認識し、後続車両22の自車両21に対する車間距離及び相対速度を算出する。
【0022】
上述の他車両情報記憶部4は、他車両情報算出部3で算出した情報を記憶及び更新する。
【0023】
上述の車線変更判断部5は、省燃費機能作動(以下、ECOモードと記載)走行中に、運転者に車線変更の意図がある旨の情報が運転操作検出部2より入力されると、後続車両22との車間距離が車線変更の可否を判断する際の基準となる車線変更判断距離L以上か否かを判断する。
【0024】
車線変更判断部5は、車線変更判断距離L以上であればECOモード解除を決定し、当該判断結果を車両制御部8へ出力する。車線変更判断距離L未満であればECOモードは解除せず、当該判断結果を情報提供部7へ出力する。
【0025】
また、車線変更判断部5は、車線変更完了の情報が運転操作検出部2より入力されると、ECOモード復帰を決定し、当該判断結果を車両制御部8へ出力する。
【0026】
さらに、車線変更判断部5は、ECOモード走行中か否かの情報を車両制御部8から入力する。
【0027】
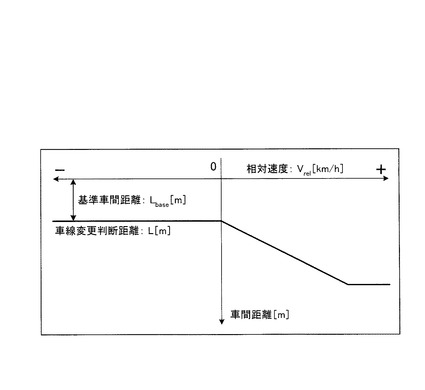
ここで車線変更判断距離Lについて図4を用いて説明する。図4は、車線変更の可否を判断する際に基準とする車線変更判断距離Lと、自車両21に対する後続車両22の相対速度Vrelの関係を示したものである。縦軸の向きが上下逆となっているが、これは後続車両22に関するグラフであることを示している。尚、グラフ内の基準車間距離Lbaseは予め車線変更判断部5に設定されている。
【0028】
図4を見ればわかるように、車線変更判断距離Lは、自車両21に対する後続車両22の相対速度Vrelが0以下の値、即ち後続車両22が自車両21と同じまたは自車両21よりも遅いときは、基準車間距離Lbase値で一定となり、相対速度Vrelが0より大きな値、即ち後続車両22が自車両21よりも速いときは、相対速度Vrelの増加と共に増大していき、相対速度Vrelが規定値以上になると一定となる。
【0029】
上述のECU6は、車両の各制御を行う機能全般が設けられているが、本発明に関する機能としては、他車両情報算出部3、他車両情報記憶部4及び車線変更判断部5を設ける。
【0030】
上述の情報提供部7は、車線変更判断部5が、後続車両22と自車両21との車間距離が車線変更判断距離L未満であると判断した場合に、警報により車線変更の先送りを運転者に促す。
【0031】
上述の車両制御部8は、車線変更判断部5及びECOモードスイッチ部11から入力した情報を基に、エンジン部9及びトランスミッション部10に動作指令を出すことで、ECOモード走行と通常走行の切り替えを行う。尚、ハイブリッド車の場合、車両制御部8は、走行モード制御により電気走行またはハイブリッド走行に切り替える動作指令も出す。
【0032】
ちなみに、運転者はECOモードスイッチ部11によりECOモード走行のON/OFFの切り替え指示を行い、当該指示は車両制御部8へ出力される。
【0033】
以下、本装置の動作を図3のフローチャートを用いて説明する。
【0034】
ステップS1では、後側方警報装置がONであるか否かを判断する。ONである場合は、ステップS2へ、OFFである場合には本装置は起動しない。
【0035】
ステップS2では、車両後側方監視部1により、図2のように自車両21の後側方監視範囲21aを監視する。
【0036】
ステップS3では、隣接車線を走行する車両が存在するかどうかを確認する。存在しない場合はステップS2へ移行し、存在する場合はステップS4へ移行する。
【0037】
ステップS4では、他車両情報算出部3により、隣接車線において自車両21から最も近い後側方車両を後続車両22に設定する。
【0038】
ステップS5では、他車両情報算出部3により、後続車両22と自車両21との車間距離及び相対速度を算出する。
【0039】
ステップS6では、他車両情報記憶部4により、他車両情報算出部3で算出された車間距離と相対速度を記憶及び更新する。
【0040】
ステップS7では、運転操作検出部2により、運転者が車線変更を行おうとしているか否かを判断する。車線変更を行おうとしている場合はステップS8へ移行し、そうでない場合はステップS2へ移行する。
【0041】
ステップS8では、車線変更判断部5により、後続車両23との車間距離が、図4における車線変更判断距離L以上か否かを判断する。車線変更判断距離L以上であればステップS10へ、車線変更判断距離L以上でなければステップS9へ移行する。
【0042】
ステップS9では、情報提供部7により、一定時間警報を発して車線変更の先送りを推奨し、ステップS14へ移行する。
【0043】
ステップS10では、車線変更判断部5によりECOモードがONか否か判断する。ECOモードがONである場合にはステップS11へ、OFFである場合にはステップS14へ移行する。
【0044】
ステップS11では、車線変更判断部5の判断に基づき、車両制御部8によりECOモード解除を行う。
【0045】
ステップS12では、運転操作検出部2により、車線変更が完了したか否かを判断する。車線変更完了の場合はステップS13へ、完了していない場合はステップS11へ移行する。
【0046】
ステップS13では、車線変更判断部5の判断に基づき、車両制御部8によりECOモード復帰を行う。
【0047】
ステップS14では、後側方警報装置がOFFであるか否かを判断する。OFFである場合には本装置の動作は終了し、ONである場合にはステップS2へ移行する。
【0048】
このように本装置では、ECOモード走行中において、隣接車線に後続車両22が確認される場合に車線変更する際、後続車両22との車間距離が車線変更判断距離L以上であればECOモードを解除することでスムーズな車線変更を可能とし、また、車線変更判断距離L未満であれば警報により運転者に車線変更の先送りを促すことで、後続車両22との衝突可能性を低減できる。
【産業上の利用可能性】
【0049】
本発明は省燃費機能作動走行時の車線変更支援装置として好適である。
【符号の説明】
【0050】
1 車両後側方監視部
2 運転操作検出部
3 他車両情報算出部
4 他車両情報記憶部
5 車線変更判断部
6 ECU
7 情報提供部
8 車両制御部
9 エンジン部
10 トランスミッション部
11 ECOモードスイッチ部
21 自車両
21a 後側方監視範囲
22 後続車両(隣接車線の中で最も自車両に近い後側方車両)
【技術分野】
【0001】
本発明は省燃費機能作動走行時の車線変更を支援する車線変更支援装置に関する。
【背景技術】
【0002】
従来技術として、走行中の燃費を抑制するため、トランスミッションを制御して早めのシフトアップを行ったり、エンジンを制御してバルブ開度の抑制や気筒の休筒を行ったり、また、ハイブリッド車においては走行モード制御により電気走行やハイブリッド走行に切り替えたりする、省燃費機能作動が知られている。
【0003】
省燃費機能作動走行は、その性質上加減速が緩やかであるため、車線変更をする際、隣接する車線の後続車両との車間距離によっては衝突可能性が生じる場合がある。
【0004】
その対策として、車線変更時に運転者が省燃費機能作動を手動で解除できるようにする装置が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特表2009‐533270号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述の装置では、省燃費機能作動の解除及び車線変更可否の判断は運転者に委ねられており、運転者が判断を誤ってしまう状況も想定されることから、スムーズな車線変更が必ずしもできるわけではなく、後続車両との衝突可能性は依然として存在する。
【0007】
そこで本発明は、上述の問題点を解消し、より安全性の高い車線変更の支援を行うことを目的とするものである。
【課題を解決するための手段】
【0008】
上記課題を解決する第1の発明に係る車線変更支援装置は、
省燃費機能作動走行中において、隣接車線に後続車両が確認される場合に、運転者に車線変更の意図がある旨の情報が入力されると、前記後続車両との車間距離が車線変更の可否を判断する際の基準となる車線変更判断距離以上か否かを判断し、前記車線変更判断距離以上であれば、省燃費機能作動を解除する判断を行う機能を設ける車線変更判断部と、
前記車線変更判断部の判断を基に前記省燃費機能作動走行または通常走行に制御する車両制御部とを備えることを特徴とする。
【0009】
上記課題を解決する第2の発明に係る車線変更支援装置は、
上記第1の発明に係る車線変更支援装置において、
前記車線変更判断部は、車線変更完了の情報が入力されると、前記省燃費機能作動に復帰する判断を行うことを特徴とする。
【0010】
上記課題を解決する第3の発明に係る車線変更支援装置は、
上記第1または2の発明に係る車線変更支援装置において、
前記車線変更判断部が前記後続車両との車間距離は前記車線変更判断距離未満であると判断した場合に、警報により車線変更の先送りを前記運転者に促す情報提供部を備えることを特徴とする。
【0011】
上記課題を解決する第4の発明に係る車線変更支援装置は、
上記第1乃至3いずれか1つの発明に係る車線変更支援装置において、
自車両後側方を監視する車両後側方監視部と、
前記運転者の車線変更の意図または車線変更完了を、方向指示器操作部の動作及びハンドル部の角度から検出する運転操作検出部と、
前記車両後側方監視部から入力された情報を基に、前記後続車両との車間距離を算出する他車両情報算出部と、
前記他車両情報算出部で算出された結果を記憶及び更新する他車両情報記憶部とを備え、
前記車線変更判断部は、前記他車両情報算出部、前記他車両情報記憶部及び前記運転操作検出部から入力された情報を基に作動することを特徴とする。
【発明の効果】
【0012】
上記第1の発明に係る車線変更支援装置によれば、車線変更時に省燃費機能作動解除を行い通常走行に切り替えることで、スムーズな車線変更や合流を実現できる。
【0013】
上記第2の発明に係る車線変更支援装置によれば、車線変更完了後に自動で省燃費機能作動を復帰することで、車線変更完了の度に手動で省燃費機能作動を復帰させる手間が省ける。
【0014】
上記第3の発明に係る車線変更支援装置によれば、車線変更不可の場合、警報により車線変更の先送りを運転者に促すことで、後続車両との衝突危険性を低減することができる。
【0015】
上記第4の発明に係る車線変更支援装置によれば、他車両情報算出部、他車両情報記憶部及び運転操作設定部から入力した情報を基に、車線変更判断部において車線変更の可否を判断することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施例1に係る車線変更支援装置の構成図である。
【図2】本発明の実施例1に係る、車両後側方監視部により自車両後側方を監視している状態を示した概略図である。
【図3】本発明の実施例1に係る車線変更支援装置動作のフローチャートである。
【図4】本発明の実施例1に係る、後続車両の車線変更判断距離と相対速度の関係を示すグラフである。
【発明を実施するための形態】
【0017】
以下、本発明に係る車線変更支援装置を実施例にて図面を用いて説明する。
【実施例1】
【0018】
本発明の実施例1に係る装置について図1を用いて説明する。本装置は、車両後側方監視部1、運転操作検出部2、他車両情報算出部3、他車両情報記憶部4、車線変更判断部5、情報提供部7及び車両制御部8を備える。また、他車両情報算出部3、他車両情報記憶部4及び車線変更判断部5は、ECU(Electronic Controlled Unit:電子制御装置)6内に設けられている。
【0019】
上述の車両後側方監視部1は、後側方警報装置をONとすると、図2の後側方監視範囲21aのように自車両21の後側方の状況をセンサにより監視し、当該情報を他車両情報算出部3へ出力する。上述の後側方警報装置とは、自車両の後側方の状況をセンサで監視し、後側方に車両が存在する場合はドアミラーに設置したLEDが点灯し、さらにその状態で車線変更しようとすると、音で警報を発する装置である。
【0020】
上述の運転操作検出部2は、運転者の車線変更の意図を、方向指示器操作部の動作及びハンドル部の角度から検出し、当該検出情報を車線変更判断部5へ出力する。また、車線変更完了時においても、方向指示器操作部の動作及びハンドル部の角度から車線変更完了を検出し、当該検出情報を車線変更判断部5へ出力する。
【0021】
上述の他車両情報算出部3は、車両後側方監視部1から入力した情報を基に、隣接車線の中で最も自車両21から近い後側方にある車両を後続車両22として認識し、後続車両22の自車両21に対する車間距離及び相対速度を算出する。
【0022】
上述の他車両情報記憶部4は、他車両情報算出部3で算出した情報を記憶及び更新する。
【0023】
上述の車線変更判断部5は、省燃費機能作動(以下、ECOモードと記載)走行中に、運転者に車線変更の意図がある旨の情報が運転操作検出部2より入力されると、後続車両22との車間距離が車線変更の可否を判断する際の基準となる車線変更判断距離L以上か否かを判断する。
【0024】
車線変更判断部5は、車線変更判断距離L以上であればECOモード解除を決定し、当該判断結果を車両制御部8へ出力する。車線変更判断距離L未満であればECOモードは解除せず、当該判断結果を情報提供部7へ出力する。
【0025】
また、車線変更判断部5は、車線変更完了の情報が運転操作検出部2より入力されると、ECOモード復帰を決定し、当該判断結果を車両制御部8へ出力する。
【0026】
さらに、車線変更判断部5は、ECOモード走行中か否かの情報を車両制御部8から入力する。
【0027】
ここで車線変更判断距離Lについて図4を用いて説明する。図4は、車線変更の可否を判断する際に基準とする車線変更判断距離Lと、自車両21に対する後続車両22の相対速度Vrelの関係を示したものである。縦軸の向きが上下逆となっているが、これは後続車両22に関するグラフであることを示している。尚、グラフ内の基準車間距離Lbaseは予め車線変更判断部5に設定されている。
【0028】
図4を見ればわかるように、車線変更判断距離Lは、自車両21に対する後続車両22の相対速度Vrelが0以下の値、即ち後続車両22が自車両21と同じまたは自車両21よりも遅いときは、基準車間距離Lbase値で一定となり、相対速度Vrelが0より大きな値、即ち後続車両22が自車両21よりも速いときは、相対速度Vrelの増加と共に増大していき、相対速度Vrelが規定値以上になると一定となる。
【0029】
上述のECU6は、車両の各制御を行う機能全般が設けられているが、本発明に関する機能としては、他車両情報算出部3、他車両情報記憶部4及び車線変更判断部5を設ける。
【0030】
上述の情報提供部7は、車線変更判断部5が、後続車両22と自車両21との車間距離が車線変更判断距離L未満であると判断した場合に、警報により車線変更の先送りを運転者に促す。
【0031】
上述の車両制御部8は、車線変更判断部5及びECOモードスイッチ部11から入力した情報を基に、エンジン部9及びトランスミッション部10に動作指令を出すことで、ECOモード走行と通常走行の切り替えを行う。尚、ハイブリッド車の場合、車両制御部8は、走行モード制御により電気走行またはハイブリッド走行に切り替える動作指令も出す。
【0032】
ちなみに、運転者はECOモードスイッチ部11によりECOモード走行のON/OFFの切り替え指示を行い、当該指示は車両制御部8へ出力される。
【0033】
以下、本装置の動作を図3のフローチャートを用いて説明する。
【0034】
ステップS1では、後側方警報装置がONであるか否かを判断する。ONである場合は、ステップS2へ、OFFである場合には本装置は起動しない。
【0035】
ステップS2では、車両後側方監視部1により、図2のように自車両21の後側方監視範囲21aを監視する。
【0036】
ステップS3では、隣接車線を走行する車両が存在するかどうかを確認する。存在しない場合はステップS2へ移行し、存在する場合はステップS4へ移行する。
【0037】
ステップS4では、他車両情報算出部3により、隣接車線において自車両21から最も近い後側方車両を後続車両22に設定する。
【0038】
ステップS5では、他車両情報算出部3により、後続車両22と自車両21との車間距離及び相対速度を算出する。
【0039】
ステップS6では、他車両情報記憶部4により、他車両情報算出部3で算出された車間距離と相対速度を記憶及び更新する。
【0040】
ステップS7では、運転操作検出部2により、運転者が車線変更を行おうとしているか否かを判断する。車線変更を行おうとしている場合はステップS8へ移行し、そうでない場合はステップS2へ移行する。
【0041】
ステップS8では、車線変更判断部5により、後続車両23との車間距離が、図4における車線変更判断距離L以上か否かを判断する。車線変更判断距離L以上であればステップS10へ、車線変更判断距離L以上でなければステップS9へ移行する。
【0042】
ステップS9では、情報提供部7により、一定時間警報を発して車線変更の先送りを推奨し、ステップS14へ移行する。
【0043】
ステップS10では、車線変更判断部5によりECOモードがONか否か判断する。ECOモードがONである場合にはステップS11へ、OFFである場合にはステップS14へ移行する。
【0044】
ステップS11では、車線変更判断部5の判断に基づき、車両制御部8によりECOモード解除を行う。
【0045】
ステップS12では、運転操作検出部2により、車線変更が完了したか否かを判断する。車線変更完了の場合はステップS13へ、完了していない場合はステップS11へ移行する。
【0046】
ステップS13では、車線変更判断部5の判断に基づき、車両制御部8によりECOモード復帰を行う。
【0047】
ステップS14では、後側方警報装置がOFFであるか否かを判断する。OFFである場合には本装置の動作は終了し、ONである場合にはステップS2へ移行する。
【0048】
このように本装置では、ECOモード走行中において、隣接車線に後続車両22が確認される場合に車線変更する際、後続車両22との車間距離が車線変更判断距離L以上であればECOモードを解除することでスムーズな車線変更を可能とし、また、車線変更判断距離L未満であれば警報により運転者に車線変更の先送りを促すことで、後続車両22との衝突可能性を低減できる。
【産業上の利用可能性】
【0049】
本発明は省燃費機能作動走行時の車線変更支援装置として好適である。
【符号の説明】
【0050】
1 車両後側方監視部
2 運転操作検出部
3 他車両情報算出部
4 他車両情報記憶部
5 車線変更判断部
6 ECU
7 情報提供部
8 車両制御部
9 エンジン部
10 トランスミッション部
11 ECOモードスイッチ部
21 自車両
21a 後側方監視範囲
22 後続車両(隣接車線の中で最も自車両に近い後側方車両)
【特許請求の範囲】
【請求項1】
省燃費機能作動走行中において、隣接車線に後続車両が確認される場合に、運転者に車線変更の意図がある旨の情報が入力されると、前記後続車両との車間距離が車線変更の可否を判断する際の基準となる車線変更判断距離以上か否かを判断し、前記車線変更判断距離以上であれば、省燃費機能作動を解除する判断を行う機能を設ける車線変更判断部と、
前記車線変更判断部の判断を基に前記省燃費機能作動走行または通常走行に制御する車両制御部とを備えることを特徴とする車線変更支援装置。
【請求項2】
前記車線変更判断部は、車線変更完了の情報が入力されると、前記省燃費機能作動を復帰する判断を行うことを特徴とする請求項1に記載の車線変更支援装置。
【請求項3】
前記車線変更判断部が前記後続車両との車間距離は前記車線変更判断距離未満であると判断した場合に、警報により車線変更の先送りを前記運転者に促す情報提供部を備えることを特徴とする請求項1または2に記載の車線変更支援装置。
【請求項4】
自車両後側方を監視する車両後側方監視部と、
前記運転者の車線変更の意図または車線変更完了を、方向指示器操作部の動作及びハンドル部の角度から検出する運転操作検出部と、
前記車両後側方監視部から入力された情報を基に、前記後続車両との車間距離を算出する他車両情報算出部と、
前記他車両情報算出部で算出された結果を記憶及び更新する他車両情報記憶部とを備え、
前記車線変更判断部は、前記他車両情報算出部、前記他車両情報記憶部及び前記運転操作検出部から入力された情報を基に作動することを特徴とする請求項1乃至3いずれか1項に記載の車線変更支援装置。
【請求項1】
省燃費機能作動走行中において、隣接車線に後続車両が確認される場合に、運転者に車線変更の意図がある旨の情報が入力されると、前記後続車両との車間距離が車線変更の可否を判断する際の基準となる車線変更判断距離以上か否かを判断し、前記車線変更判断距離以上であれば、省燃費機能作動を解除する判断を行う機能を設ける車線変更判断部と、
前記車線変更判断部の判断を基に前記省燃費機能作動走行または通常走行に制御する車両制御部とを備えることを特徴とする車線変更支援装置。
【請求項2】
前記車線変更判断部は、車線変更完了の情報が入力されると、前記省燃費機能作動を復帰する判断を行うことを特徴とする請求項1に記載の車線変更支援装置。
【請求項3】
前記車線変更判断部が前記後続車両との車間距離は前記車線変更判断距離未満であると判断した場合に、警報により車線変更の先送りを前記運転者に促す情報提供部を備えることを特徴とする請求項1または2に記載の車線変更支援装置。
【請求項4】
自車両後側方を監視する車両後側方監視部と、
前記運転者の車線変更の意図または車線変更完了を、方向指示器操作部の動作及びハンドル部の角度から検出する運転操作検出部と、
前記車両後側方監視部から入力された情報を基に、前記後続車両との車間距離を算出する他車両情報算出部と、
前記他車両情報算出部で算出された結果を記憶及び更新する他車両情報記憶部とを備え、
前記車線変更判断部は、前記他車両情報算出部、前記他車両情報記憶部及び前記運転操作検出部から入力された情報を基に作動することを特徴とする請求項1乃至3いずれか1項に記載の車線変更支援装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−109446(P2013−109446A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252323(P2011−252323)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
[ Back to top ]