
車線変更検出装置
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は、車線変更検出装置に係り、特に、特に道路上に設置され当該路面での車両の車線変更を画像処理により検出する車線変更検出装置に関する。
【0002】
【従来の技術】従来、車両の車線変更を画像処理により認識するには、車線の認識処理と、車両の認識処理と、車線変更の認識処理とが必要であった。車線の認識を行うものとしては、例えば、左右の白線をエッジ抽出処理により個別に認識する手法が、特開平6−3411821号公報に開示されている。
【0003】また、車両の認識は、例えば、背景画像との差分を取ることによって行っていた。そして、車線変更の検出処理は、切り出された車両の軌跡をトレース処理して行っていた。
【0004】
【発明が解決しようとする課題】第1の問題点は、従来の背景差分とトレース処理による車線変更検出では、背景差分による車両の切り出しが天候条件等の変化に弱く、そのため検出精度が天候条件等の変化により悪化することである。
【0005】その理由は、天候の変化により背景自体の輝度か変化するため、画像処理を行う画面全体が輝度変化してしまい、車両の切り出しが出来なくなってしまうためである。
【0006】第2の問題点は、リアルタイム処理が難しいことである。
【0007】その理由は、車両のトレース処理は、処理量が非常に多いため、高速に処理するハードウェアを開発することが困難なためである。
【0008】
【発明の目的】本発明は、かかる従来例の有する不都合を改善し、特に、天候などの環境変化に対しての高信頼性と、リアルタイム処理可能な高速性を得ることのできる車線変更検出装置を提供することを、その目的とする。
【0009】
【課題を解決するための手段】そこで、本発明では、道路を撮像する撮像手段と、この撮像手段によって撮像された入力画像の領域を当該道路の車線に応じて分割する領域分割手段と、この領域分割手段によって分割された車線領域毎に画像のエッジを抽出するエッジ抽出手段と、このエッジ抽出手段によって各車線領域毎に抽出されたエッジの数をそれぞれカウントするエッジ数カウント手段とを備えている。しかも、このエッジ数カウント手段に、前記領域毎のカウント数が2以上の領域で変化したときに当該道路で車両の走行車線が変化したと判定する走行車線判定手段を併設した、という構成を採っている。これにより前述した目的を達成しようとするものである。
【0010】エッジ抽出手段は、領域分割手段によって分割された車線領域毎に画像のエッジを抽出する。道路に車両が存在する場合には、このエッジ数が増加するため、エッジ数カウント手段がこのエッジ数を各領域毎にカウントすると、各車線領域毎の車両の存在に対応した情報を得る。さらに、走行車線判定手段は、領域毎のカウント数が2以上の領域で変化したときに、当該道路で車両の走行車線が変化したと判定する。これは、車両が進路を変更して一方の車線領域から外れると、当該一方の車線領域でのエッジ数が減少し、さらに、当該走行車線を変更した車両が他方の車線領域に入ると、当該他方の車線領域のエッジ数が増加することを利用している。このとき、ひとつの車線領域のみでエッジ数の変化が生じた場合には、当該車線領域を直進する車両が撮像範囲に入ったか、または撮像範囲から出たかと判定できるため、ここでは、領域毎のカウント数が2以上の領域で変化したときに車両の車線変更が生じたと判定する。
【0011】
【発明の実施の形態】次に、本発明の一実施形態について図面を参照して説明する。図1は本実施形態による車線変更検出装置の構成を示すブロック図である。車線変更検出装置は、道路を撮像する撮像手段1と、この撮像手段1によって撮像された入力画像の領域を当該路面の車線に応じて分割する領域分割手段3と、この領域分割手段3によって分割された車線領域毎に画像のエッジを抽出するエッジ抽出手段5と、このエッジ抽出手段5によって各車線領域毎に抽出されたエッジの数をそれぞれカウントするエッジ数カウント手段7とを備えている。しかも、このエッジ数カウント手段7に、前記領域毎のカウント数が2以上の領域で変化したときに当該路面で車両の走行車線が変化したと判定する走行車線判定手段9を併設している。
【0012】また、実施の形態によっては、走行車線判定手段9は、一方の車線領域のエッジ数の減少と略同数のエッジ数が他方の車線領域で増加したときに当該一方の車線から他方の車線へ前記車両が走行車線を変更したと判定するエッジ数増減数別判定機能を備えると良い。このエッジ数増減数別判定機能により、どの車線からどの車線へ車両が車線の変更をしたのかを精度良く判定することができる。
【0013】撮像手段1は、道路上に固定されるか、または、車両に搭載される。撮像手段1が道路上に固定される場合、撮像範囲内の車線領域は予め定まるため、領域分割手段3は、撮像範囲について予め車線別に領域を定義する。一方、撮像手段が車両に搭載される場合には、領域分割手段3は、白線の認識処理等を行って、撮像範囲を車線別に分割する。
【0014】エッジ抽出手段5は、各車線領域毎に、領域内の濃淡が変化するエッジを抽出する。ある実施例では、ソーベルフィルタ処理によりエッジを強調した後に当該エッジを抽出する。エッジを強調する方向は水平方向に限らず、全ての方向のエッジを抽出する。このエッジの抽出は車両の検出を目的とするため、一定長さ以下となるエッジはノイズとして破棄するようにしてもよい。
【0015】エッジ数カウント手段7は、エッジ抽出手段5によって抽出されたエッジにラベリングをすると共に当該ラベル数をカウントするなどの処理により、各車線領域毎のエッジ数をカウントする。
【0016】走行車線判定手段9は、エッジ数カウント手段7によってカウントされたエッジ数に基づいて、撮像範囲内に存在する車両の走行車線の変更を判定する。2つの領域でエッジ数が変化した場合に、当該領域間で車線変更が生じたと判定するため、撮像範囲に車両が入ったことによるエッジ数の変化による誤検出をすることなく、精度良く車線の変更を検出することができる。
【0017】
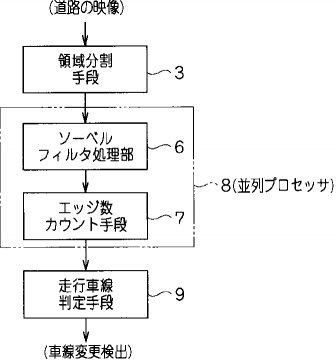
【実施例】次に、本発明の一実施例を説明する。本実施例では、エッジ抽出手段5が、前記車線領域毎の画像のエッジを強調するソーベルフィルタ処理部6を備えている。また、エッジ抽出手段5とエッジ数カウント手段7とは、並列プロセッサ8により処理される。すなわち、エッジ抽出手段5は、前記車線領域毎の画像のエッジの強調及び抽出を各車両領域の画像毎に並列して処理する並列処理機能を備えた。
【0018】図3は本実施例により撮像した画像を概略表示した例を示す説明図である。図3に示す例では、撮像手段1を、高速道路に固定して設置している。これに応じて、領域分割手段3は、前記撮像手段1が撮像する画像に基づいて予め前記領域を設定する。図3に示すように、本実施例では、三車線あるため、A部〜C部までの領域に分割する。
【0019】本実施例では、並列プロセッサを使用した高速処理可能なソーベルフィルタ処理部を備え、ソーベルフィルタ処理は、天候等の環境変化に影響されにくいため、検出精度が高くなる。また、ソーベルフィルタ処理と、工ッジのカウント処理を高速うため、画像処理専用の並列プロセッサて構成したハードウェアを使用しリアルタイム処理が可能である。
【0020】さらに、車線変更を検出するアルゴリズムが、エッジ量変化の経緯によるものなので、処理量が少なく、車線変更を高速に検出できる。
【0021】次に、本実施例の動作を説明する。まず始めに、路面の映像を図3に示すように走行車線部〈以下A部)、センターライン部(以下B部)、追い越し車線部(以下C部)に分割する。次いで、A部,B部,C部それぞれをについて画像処理を行い、エッジ数を検出する。さらにA部,B部,C部それぞれについてエッジ数をカウントする。
【0022】最後にA部、B部、C部についてそれぞれエッジ数の変化を検出し、A部、B部、C部の各々のエッジ変化から車線変更を判定する。
【0023】この手法では、道路の路面はエッジ数が少なく、車両が存在するとエッジ量が増えることを利用して車両を検出している。A部、B部、C部のエッジ数変化から車線変更の判定法は、走行車線から追い越し車線に車線変更した場合を考えると、まずA部に車両があるためA部のエッジ数が多くなる。つぎに車両がA部からB部へ移動するため、A部のエッジ数が少なくなり、B部のエッジ数が多くなる。この様にA部のエッジ数が少なくなり、B部のエッジ数が多くなる場合を検出した場合に、車線変更と判断している。
【0024】同様に追い越し車線から走行車線へ車線変更した場合は、C部のエッジ数が少なくなり、B部のエッジ数が多くなるのでこの様な変化を検出した場合に車線変更と判断する。
【0025】上述したように本実施例によると、車両の検出にソーベルフィルタ処理は使用しているので、輝度変化があってもエッジは比較的安定しているので、車両検出の精度が高いため、天候等の環境変化に対して検出精度が高い。
【0026】ハードウェアを専用の並列プロセッサを使用しているため、ソーベルフィルタ処理とエッジカウント処理を高速で行える。
【0027】車線変更検出のアルゴリズムが車両のトレース処理ではなくエッジ数変化の検出によるものなので、少ない処理で、車線変更検出が可能なため、車線変更の検出を高速に行える。
【0028】
【発明の効果】本発明は以上のように構成され機能するので、これによると、エッジ抽出手段が、領域分割手段によって分割された車線領域毎に画像のエッジを抽出し、走行車線判定手段が、領域毎のエッジ数のカウント数が2以上の領域で変化したときに、当該道路で車両の走行車線が変化したと判定するため、画像処理による複雑な認識処理を行わずに、撮像範囲内で生じた車両の車線変更を検出することができ、特に、車両が進路を変更して一方の車線領域から外れると、当該一方の車線領域でのエッジ数が減少し、さらに、当該走行車線を変更した車両が他方の車線領域に入ると、当該他方の車線領域のエッジ数が増加するため、精度良く車線変更を検出することができ、さらに、領域毎のカウント数が2以上の領域で変化したときに車両の車線変更が生じたと判定するため、車線領域を直進する車両が撮像範囲に入ったか、または撮像範囲から出た場合に誤検出することなく、車線変更のみを良好に検出することができる従来にない優れた車線変更検出装置を提供することができる。
【図面の簡単な説明】
【図1】本発明による一実施形態の構成を示すブロック図である。
【図2】本発明による一実施例の構成を示すブロック図である。
【図3】本実施例による領域分割の例を示す説明図である。
【符号の説明】
1 撮像手段
3 領域分割手段
5 エッジ抽出手段
7 エッジ数カウント手段
9 走行車線判定手段
【0001】
【発明の属する技術分野】本発明は、車線変更検出装置に係り、特に、特に道路上に設置され当該路面での車両の車線変更を画像処理により検出する車線変更検出装置に関する。
【0002】
【従来の技術】従来、車両の車線変更を画像処理により認識するには、車線の認識処理と、車両の認識処理と、車線変更の認識処理とが必要であった。車線の認識を行うものとしては、例えば、左右の白線をエッジ抽出処理により個別に認識する手法が、特開平6−3411821号公報に開示されている。
【0003】また、車両の認識は、例えば、背景画像との差分を取ることによって行っていた。そして、車線変更の検出処理は、切り出された車両の軌跡をトレース処理して行っていた。
【0004】
【発明が解決しようとする課題】第1の問題点は、従来の背景差分とトレース処理による車線変更検出では、背景差分による車両の切り出しが天候条件等の変化に弱く、そのため検出精度が天候条件等の変化により悪化することである。
【0005】その理由は、天候の変化により背景自体の輝度か変化するため、画像処理を行う画面全体が輝度変化してしまい、車両の切り出しが出来なくなってしまうためである。
【0006】第2の問題点は、リアルタイム処理が難しいことである。
【0007】その理由は、車両のトレース処理は、処理量が非常に多いため、高速に処理するハードウェアを開発することが困難なためである。
【0008】
【発明の目的】本発明は、かかる従来例の有する不都合を改善し、特に、天候などの環境変化に対しての高信頼性と、リアルタイム処理可能な高速性を得ることのできる車線変更検出装置を提供することを、その目的とする。
【0009】
【課題を解決するための手段】そこで、本発明では、道路を撮像する撮像手段と、この撮像手段によって撮像された入力画像の領域を当該道路の車線に応じて分割する領域分割手段と、この領域分割手段によって分割された車線領域毎に画像のエッジを抽出するエッジ抽出手段と、このエッジ抽出手段によって各車線領域毎に抽出されたエッジの数をそれぞれカウントするエッジ数カウント手段とを備えている。しかも、このエッジ数カウント手段に、前記領域毎のカウント数が2以上の領域で変化したときに当該道路で車両の走行車線が変化したと判定する走行車線判定手段を併設した、という構成を採っている。これにより前述した目的を達成しようとするものである。
【0010】エッジ抽出手段は、領域分割手段によって分割された車線領域毎に画像のエッジを抽出する。道路に車両が存在する場合には、このエッジ数が増加するため、エッジ数カウント手段がこのエッジ数を各領域毎にカウントすると、各車線領域毎の車両の存在に対応した情報を得る。さらに、走行車線判定手段は、領域毎のカウント数が2以上の領域で変化したときに、当該道路で車両の走行車線が変化したと判定する。これは、車両が進路を変更して一方の車線領域から外れると、当該一方の車線領域でのエッジ数が減少し、さらに、当該走行車線を変更した車両が他方の車線領域に入ると、当該他方の車線領域のエッジ数が増加することを利用している。このとき、ひとつの車線領域のみでエッジ数の変化が生じた場合には、当該車線領域を直進する車両が撮像範囲に入ったか、または撮像範囲から出たかと判定できるため、ここでは、領域毎のカウント数が2以上の領域で変化したときに車両の車線変更が生じたと判定する。
【0011】
【発明の実施の形態】次に、本発明の一実施形態について図面を参照して説明する。図1は本実施形態による車線変更検出装置の構成を示すブロック図である。車線変更検出装置は、道路を撮像する撮像手段1と、この撮像手段1によって撮像された入力画像の領域を当該路面の車線に応じて分割する領域分割手段3と、この領域分割手段3によって分割された車線領域毎に画像のエッジを抽出するエッジ抽出手段5と、このエッジ抽出手段5によって各車線領域毎に抽出されたエッジの数をそれぞれカウントするエッジ数カウント手段7とを備えている。しかも、このエッジ数カウント手段7に、前記領域毎のカウント数が2以上の領域で変化したときに当該路面で車両の走行車線が変化したと判定する走行車線判定手段9を併設している。
【0012】また、実施の形態によっては、走行車線判定手段9は、一方の車線領域のエッジ数の減少と略同数のエッジ数が他方の車線領域で増加したときに当該一方の車線から他方の車線へ前記車両が走行車線を変更したと判定するエッジ数増減数別判定機能を備えると良い。このエッジ数増減数別判定機能により、どの車線からどの車線へ車両が車線の変更をしたのかを精度良く判定することができる。
【0013】撮像手段1は、道路上に固定されるか、または、車両に搭載される。撮像手段1が道路上に固定される場合、撮像範囲内の車線領域は予め定まるため、領域分割手段3は、撮像範囲について予め車線別に領域を定義する。一方、撮像手段が車両に搭載される場合には、領域分割手段3は、白線の認識処理等を行って、撮像範囲を車線別に分割する。
【0014】エッジ抽出手段5は、各車線領域毎に、領域内の濃淡が変化するエッジを抽出する。ある実施例では、ソーベルフィルタ処理によりエッジを強調した後に当該エッジを抽出する。エッジを強調する方向は水平方向に限らず、全ての方向のエッジを抽出する。このエッジの抽出は車両の検出を目的とするため、一定長さ以下となるエッジはノイズとして破棄するようにしてもよい。
【0015】エッジ数カウント手段7は、エッジ抽出手段5によって抽出されたエッジにラベリングをすると共に当該ラベル数をカウントするなどの処理により、各車線領域毎のエッジ数をカウントする。
【0016】走行車線判定手段9は、エッジ数カウント手段7によってカウントされたエッジ数に基づいて、撮像範囲内に存在する車両の走行車線の変更を判定する。2つの領域でエッジ数が変化した場合に、当該領域間で車線変更が生じたと判定するため、撮像範囲に車両が入ったことによるエッジ数の変化による誤検出をすることなく、精度良く車線の変更を検出することができる。
【0017】
【実施例】次に、本発明の一実施例を説明する。本実施例では、エッジ抽出手段5が、前記車線領域毎の画像のエッジを強調するソーベルフィルタ処理部6を備えている。また、エッジ抽出手段5とエッジ数カウント手段7とは、並列プロセッサ8により処理される。すなわち、エッジ抽出手段5は、前記車線領域毎の画像のエッジの強調及び抽出を各車両領域の画像毎に並列して処理する並列処理機能を備えた。
【0018】図3は本実施例により撮像した画像を概略表示した例を示す説明図である。図3に示す例では、撮像手段1を、高速道路に固定して設置している。これに応じて、領域分割手段3は、前記撮像手段1が撮像する画像に基づいて予め前記領域を設定する。図3に示すように、本実施例では、三車線あるため、A部〜C部までの領域に分割する。
【0019】本実施例では、並列プロセッサを使用した高速処理可能なソーベルフィルタ処理部を備え、ソーベルフィルタ処理は、天候等の環境変化に影響されにくいため、検出精度が高くなる。また、ソーベルフィルタ処理と、工ッジのカウント処理を高速うため、画像処理専用の並列プロセッサて構成したハードウェアを使用しリアルタイム処理が可能である。
【0020】さらに、車線変更を検出するアルゴリズムが、エッジ量変化の経緯によるものなので、処理量が少なく、車線変更を高速に検出できる。
【0021】次に、本実施例の動作を説明する。まず始めに、路面の映像を図3に示すように走行車線部〈以下A部)、センターライン部(以下B部)、追い越し車線部(以下C部)に分割する。次いで、A部,B部,C部それぞれをについて画像処理を行い、エッジ数を検出する。さらにA部,B部,C部それぞれについてエッジ数をカウントする。
【0022】最後にA部、B部、C部についてそれぞれエッジ数の変化を検出し、A部、B部、C部の各々のエッジ変化から車線変更を判定する。
【0023】この手法では、道路の路面はエッジ数が少なく、車両が存在するとエッジ量が増えることを利用して車両を検出している。A部、B部、C部のエッジ数変化から車線変更の判定法は、走行車線から追い越し車線に車線変更した場合を考えると、まずA部に車両があるためA部のエッジ数が多くなる。つぎに車両がA部からB部へ移動するため、A部のエッジ数が少なくなり、B部のエッジ数が多くなる。この様にA部のエッジ数が少なくなり、B部のエッジ数が多くなる場合を検出した場合に、車線変更と判断している。
【0024】同様に追い越し車線から走行車線へ車線変更した場合は、C部のエッジ数が少なくなり、B部のエッジ数が多くなるのでこの様な変化を検出した場合に車線変更と判断する。
【0025】上述したように本実施例によると、車両の検出にソーベルフィルタ処理は使用しているので、輝度変化があってもエッジは比較的安定しているので、車両検出の精度が高いため、天候等の環境変化に対して検出精度が高い。
【0026】ハードウェアを専用の並列プロセッサを使用しているため、ソーベルフィルタ処理とエッジカウント処理を高速で行える。
【0027】車線変更検出のアルゴリズムが車両のトレース処理ではなくエッジ数変化の検出によるものなので、少ない処理で、車線変更検出が可能なため、車線変更の検出を高速に行える。
【0028】
【発明の効果】本発明は以上のように構成され機能するので、これによると、エッジ抽出手段が、領域分割手段によって分割された車線領域毎に画像のエッジを抽出し、走行車線判定手段が、領域毎のエッジ数のカウント数が2以上の領域で変化したときに、当該道路で車両の走行車線が変化したと判定するため、画像処理による複雑な認識処理を行わずに、撮像範囲内で生じた車両の車線変更を検出することができ、特に、車両が進路を変更して一方の車線領域から外れると、当該一方の車線領域でのエッジ数が減少し、さらに、当該走行車線を変更した車両が他方の車線領域に入ると、当該他方の車線領域のエッジ数が増加するため、精度良く車線変更を検出することができ、さらに、領域毎のカウント数が2以上の領域で変化したときに車両の車線変更が生じたと判定するため、車線領域を直進する車両が撮像範囲に入ったか、または撮像範囲から出た場合に誤検出することなく、車線変更のみを良好に検出することができる従来にない優れた車線変更検出装置を提供することができる。
【図面の簡単な説明】
【図1】本発明による一実施形態の構成を示すブロック図である。
【図2】本発明による一実施例の構成を示すブロック図である。
【図3】本実施例による領域分割の例を示す説明図である。
【符号の説明】
1 撮像手段
3 領域分割手段
5 エッジ抽出手段
7 エッジ数カウント手段
9 走行車線判定手段
【特許請求の範囲】
【請求項1】 路面を撮像する撮像手段と、この撮像手段によって撮像された入力画像の領域を当該路面の車線に応じて分割する領域分割手段と、この領域分割手段によって分割された車線領域毎に画像のエッジを抽出するエッジ抽出手段と、このエッジ抽出手段によって各車線領域毎に抽出されたエッジの数をそれぞれカウントするエッジ数カウント手段とを備え、このエッジ数カウント手段に、前記領域毎のカウント数が2以上の領域で変化したときに当該路面で車両の走行車線が変化したと判定する走行車線判定手段を併設したことを特徴とする車線変更検出装置。
【請求項2】 前記走行車線判定手段が、一方の車線領域のエッジ数の減少と略同数のエッジ数が他方の車線領域で増加したときに当該一方の車線から他方の車線へ前記車両が走行車線を変更したと判定するエッジ数増減数別判定機能を備えたことを特徴とする請求項1記載の車線変更検出装置。
【請求項3】 前記エッジ抽出手段が、前記車線領域毎の画像のエッジを強調するソーベルフィルタ処理部を備えたことを特徴とする請求項1記載の車線変更検出装置。
【請求項4】 前記エッジ抽出手段が、前記車線領域毎の画像のエッジの強調及び抽出を各車両領域の画像毎に並列して処理する並列処理機能を備えたことを特徴とする請求項3記載の車線変更検出装置。
【請求項5】 前記撮像手段を、高速道路に固定して設置され、前記領域分割手段が、前記撮像手段が撮像する画像に基づいて予め前記領域を設定されたことを特徴とする請求項1記載の車線変更検出装置。
【請求項1】 路面を撮像する撮像手段と、この撮像手段によって撮像された入力画像の領域を当該路面の車線に応じて分割する領域分割手段と、この領域分割手段によって分割された車線領域毎に画像のエッジを抽出するエッジ抽出手段と、このエッジ抽出手段によって各車線領域毎に抽出されたエッジの数をそれぞれカウントするエッジ数カウント手段とを備え、このエッジ数カウント手段に、前記領域毎のカウント数が2以上の領域で変化したときに当該路面で車両の走行車線が変化したと判定する走行車線判定手段を併設したことを特徴とする車線変更検出装置。
【請求項2】 前記走行車線判定手段が、一方の車線領域のエッジ数の減少と略同数のエッジ数が他方の車線領域で増加したときに当該一方の車線から他方の車線へ前記車両が走行車線を変更したと判定するエッジ数増減数別判定機能を備えたことを特徴とする請求項1記載の車線変更検出装置。
【請求項3】 前記エッジ抽出手段が、前記車線領域毎の画像のエッジを強調するソーベルフィルタ処理部を備えたことを特徴とする請求項1記載の車線変更検出装置。
【請求項4】 前記エッジ抽出手段が、前記車線領域毎の画像のエッジの強調及び抽出を各車両領域の画像毎に並列して処理する並列処理機能を備えたことを特徴とする請求項3記載の車線変更検出装置。
【請求項5】 前記撮像手段を、高速道路に固定して設置され、前記領域分割手段が、前記撮像手段が撮像する画像に基づいて予め前記領域を設定されたことを特徴とする請求項1記載の車線変更検出装置。
【図1】



【図2】
【図3】

【図2】
【図3】
【特許番号】第2885216号
【登録日】平成11年(1999)2月12日
【発行日】平成11年(1999)4月19日
【国際特許分類】
【出願番号】特願平9−16670
【出願日】平成9年(1997)1月30日
【公開番号】特開平10−214395
【公開日】平成10年(1998)8月11日
【審査請求日】平成9年(1997)1月30日
【出願人】(000004237)日本電気株式会社 (19,353)
【参考文献】
【文献】特開 平8−329383(JP,A)
【文献】特開 平4−309200(JP,A)
【文献】特開 平3−273400(JP,A)
【文献】特開 平3−84491(JP,A)
【登録日】平成11年(1999)2月12日
【発行日】平成11年(1999)4月19日
【国際特許分類】
【出願日】平成9年(1997)1月30日
【公開番号】特開平10−214395
【公開日】平成10年(1998)8月11日
【審査請求日】平成9年(1997)1月30日
【出願人】(000004237)日本電気株式会社 (19,353)
【参考文献】
【文献】特開 平8−329383(JP,A)
【文献】特開 平4−309200(JP,A)
【文献】特開 平3−273400(JP,A)
【文献】特開 平3−84491(JP,A)
[ Back to top ]