
車線維持支援装置、及び車線維持支援方法
【課題】車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置を提供する。
【解決手段】国と当該国の道路環境とを関連付けて記憶する道路環境記憶部と、車両が現在走行している国を示す国情報を取得する国情報取得部と、国情報取得部が取得した国情報に基づいて、道路環境記憶部を参照し、車両が現在走行している国の道路環境の情報を取得する道路環境取得部と、道路環境取得部が取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から車両が現在走行している道路環境を認識する道路環境認識部と、道路環境認識部が認識した道路環境に対応する車線維持支援を行う車線維持支援部とを備える。
【解決手段】国と当該国の道路環境とを関連付けて記憶する道路環境記憶部と、車両が現在走行している国を示す国情報を取得する国情報取得部と、国情報取得部が取得した国情報に基づいて、道路環境記憶部を参照し、車両が現在走行している国の道路環境の情報を取得する道路環境取得部と、道路環境取得部が取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から車両が現在走行している道路環境を認識する道路環境認識部と、道路環境認識部が認識した道路環境に対応する車線維持支援を行う車線維持支援部とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車線維持支援装置、及び車線維持支援方法に関し、より特定的には、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置、及び車線維持支援方法に関する。
【背景技術】
【0002】
従来、車両が走行する際の車線維持を支援する技術として、撮像した路面画像から区画線を認識し、区画線から認識した道路環境に即した車線維持支援を行う技術が提案されている(例えば、特許文献1参照)。
【特許文献1】特開2005−4442号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述した従来の技術では、路面画像から道路環境の認識が困難である場合、例えば、区画線が2本以上の線からなる場合、区画線が円形タイルである場合、区画線無しの分岐である場合、又は区画線無しの合流である場合等の道路環境を有する外国の道路では、道路環境を認識するまでの処理負荷が大きいため、認識した道路環境に即した車線維持支援を行うには効率的ではない。また、特殊な道路環境に対応するための専用の認識ロジックを常時作動させると誤動作に繋がり易い。
【0004】
そこで、本発明は、上記問題に鑑みてなされた。すなわち、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができると共に、誤作動させることなく車線維持支援を行うことができる車線維持支援装置、及び車線維持支援方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第1の局面は、道路を走行する車両の車線維持を支援する車線維持支援装置に向けられている。本発明は、国と当該国の道路環境とを関連付けて記憶する道路環境記憶部と、車両が現在走行している国を示す国情報を取得する国情報取得部と、国情報取得部が取得した国情報に基づいて、道路環境記憶部を参照し、車両が現在走行している国の道路環境の情報を取得する道路環境取得部と、道路環境取得部が取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から車両が現在走行している道路環境を認識する道路環境認識部と、道路環境認識部が認識した道路環境に対応する車線維持支援を行う車線維持支援部とを備える。
【0006】
これにより、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置を提供することができる。
【0007】
また、道路環境の情報は、ボッツドッツ、又はカープールレーンを示す区分線情報であることが好ましい。
【0008】
これにより、絞り込んだ道路環境の中から車両が現在走行している道路環境がボッツドッツ、又はカープールレーンであることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置を提供することができる。
【0009】
また、道路環境の情報は、分岐、合流、又は交差点を示す分岐情報であることが好ましい。
【0010】
これにより、絞り込んだ道路環境の中から車両が現在走行している道路環境が分岐、合流、又は交差点であることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置を提供することができる。
【0011】
また、道路環境の情報は、工事区間、又は渋滞区間を示すテンポラリ情報であることが好ましい。
【0012】
これにより、車線維持支援そのものを停止し、誤作動を低減することができる車線維持支援装置を提供することができる。
【0013】
また、道路環境認識部は、画像認識によって車両が走行している道路環境を認識することが好ましい。
【0014】
これにより、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を画像認識によって認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置を提供することができる。
【0015】
本発明の第2の局面は、道路を走行する車両の車線維持を支援する車線維持支援方法に向けられている。本発明は、車両が現在走行している国を示す国情報を取得する国情報取得ステップと、国情報取得ステップで取得した国情報に基づいて、国と当該国の道路環境とを関連付けて記憶する道路環境記憶部を参照し、車両が現在走行している国の道路環境の情報を取得する道路環境取得ステップと、道路環境取得ステップで取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から車両が現在走行している道路環境を認識する道路環境認識ステップと、道路環境認識ステップで認識した道路環境に対応する車線維持支援を行う車線維持支援ステップとを備える。
【0016】
これにより、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援方法を提供することができる。
【0017】
また、道路環境の情報は、ボッツドッツ、又はカープールレーンを示す区分線情報であることが好ましい。
【0018】
これにより、絞り込んだ道路環境の中から車両が現在走行している道路環境がボッツドッツ、又はカープールレーンであることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援方法を提供することができる。
【0019】
また、道路環境の情報は、分岐、合流、又は交差点を示す分岐情報であることが好ましい。
【0020】
これにより、絞り込んだ道路環境の中から車両が現在走行している道路環境が分岐、合流、又は交差点であることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援方法を提供することができる。
【0021】
また、道路環境の情報は、工事区間、又は渋滞区間を示すテンポラリ情報であることが好ましい。
【0022】
これにより、絞り込んだ道路環境の中から車両が現在走行している道路環境が工事区間、又は渋滞区間であることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援方法を提供することができる。
【0023】
また、道路環境認識ステップでは、画像認識によって車両が走行している道路環境を認識することが好ましい。
【0024】
これにより、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を画像認識によって認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援方法を提供することができる。
【発明の効果】
【0025】
以上説明したように、本発明の各局面によれば、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置、及び車線維持支援方法を提供することができる。
【発明を実施するための最良の形態】
【0026】
(実施形態)
以下本発明の実施の形態に係る車線維持支援装置について図面に従って詳細に説明する。
【0027】
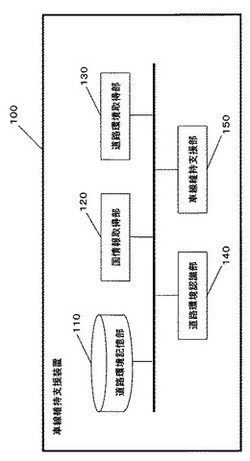
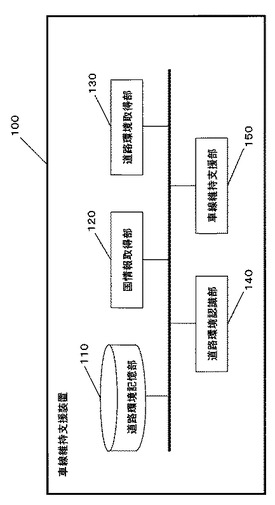
図1は、本発明の実施の形態に係る車線維持支援装置の全体構成を示すブロック図である。図1において、車線維持支援装置100は、道路環境記憶部110、国情報取得部120、道路環境取得部130、道路環境認識部140、及び車線維持支援部150を備える。
【0028】
道路環境記憶部110は、国と当該国の道路環境とを関連付けて記憶する、例えばRAM、ROM、又はHDD等のメモリである。
【0029】
国情報取得部120は、ナビゲーション装置によって車両の現在位置を計測し、計測された現在位置に基づいて地図データを参照し、当該車両が現在走行している国を示す情報を取得する。
【0030】
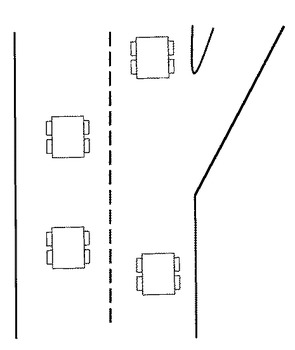
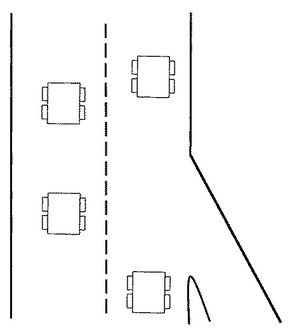
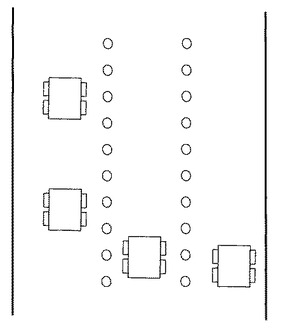
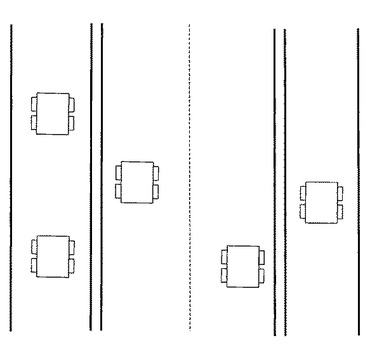
道路環境取得部130は、国情報取得部120が取得した国情報に基づいて、道路環境記憶部110を参照し、車両が現在走行している国の道路環境の情報、例えば図3に示すような線なし分岐の情報、図4に示すような線なし合流の情報、図5に示すようなボッツドッツの情報、又は図6に示すようなカープールレーンの情報を取得する。なお、道路環境の情報は、分岐、合流、又は交差点を示す分岐情報であってもよいし、工事区間、又は渋滞区間を示すテンポラリ情報であってもよい。
【0031】
道路環境認識部140は、道路環境取得部130が取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から、車両周辺をカメラによって撮像した画像を画像認識することによって車両が現在走行している道路環境を認識する。
【0032】
車線維持支援部150は、道路環境認識部140が認識した道路環境に対応する車線維持支援を行う。
【0033】
以下、本発明の実施の形態に係る車線維持支援装置100の動作について図2に示すフロー図に従って説明する。
【0034】
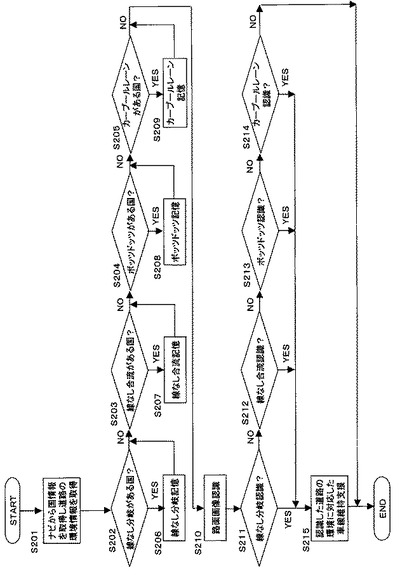
まず、国情報取得部120は、ナビゲーション装置から車両が現在走行している国を示す情報を取得する。道路環境取得部130は、国情報取得部120が取得した国情報に基づいて、道路環境記憶部110を参照し、車両が現在走行している国の道路環境の情報を取得する(ステップS201)。
【0035】
次に、道路環境認識部140は、道路環境取得部130が取得した道路環境の情報に基づき、線なし分岐がある国か否かを判定する(ステップS202)。
【0036】
ステップS202において、線なし分岐がある国であると判定された場合、道路環境認識部140は、線なし分岐がある旨の情報を記憶する(ステップS202→S206)。一方、ステップS202において、線なし分岐がない国であると判定された場合、道路環境認識部140は、道路環境取得部130が取得した道路環境の情報に基づき、線なし合流がある国であるか否かを判定する(ステップS202→S203)。
【0037】
ステップS203において、線なし合流がある国であると判定された場合、道路環境認識部140は、線なし合流がある旨の情報を記憶する(ステップS203→S207)。一方、ステップS203において、線なし合流がない国であると判定された場合、道路環境認識部140は、道路環境取得部130が取得した道路環境の情報に基づき、ボッツドッツがある国であるか否かを判定する(ステップS203→S204)。
【0038】
ステップS204において、ボッツドッツがある国であると判定された場合、道路環境認識部140は、ボッツドッツがある旨の情報を記憶する(ステップS204→S208)。一方、ステップS204において、ボッツドッツがない国であると判定された場合、道路環境認識部140は、道路環境取得部130が取得した道路環境の情報に基づき、カープールレーンがある国であるか否かを判定する(ステップS204→S205)。
【0039】
ステップS205において、カープールレーンがある国であると判定された場合、道路環境認識部140は、カープールレーンがある旨の情報を記憶する(ステップS205→S209)。一方、ステップS205において、カープールレーンがない国であると判定された場合、道路環境認識部140は処理を終了する。
【0040】
車両が現在走行している国の道路環境の情報が取得され、記憶されると、道路環境認識部140は、記憶された道路環境の中から、車両が現在走行している道路環境を、路面画像を画像認識することによって認識する(ステップS210)。
【0041】
次に、車線維持支援部150は、道路環境認識部140が路面画像を画像認識した結果、線なし分岐を認識したか否かを判定する(ステップS211)。
【0042】
ステップS211において、線なし分岐を認識したと判定された場合、車線維持支援部150は、線なし分岐の道路環境に対応する車線維持支援を行う(ステップS211→S215)。一方、ステップS211において、線なし分岐を認識していないと判定された場合、車線維持支援部150は、道路環境認識部140が路面画像を画像認識した結果、線なし合流を認識したか否かを判定する(ステップS211→S212)。
【0043】
ステップS212において、線なし合流を認識したと判定された場合、車線維持支援部150は、線なし合流の道路環境に対応する車線維持支援を行う(ステップS212→S215)。一方、ステップS212において、線なし合流を認識していないと判定された場合、車線維持支援部150は、道路環境認識部140が路面画像を画像認識した結果、ボッツドッツを認識したか否かを判定する(ステップS212→S213)。
【0044】
ステップS213において、ボッツドッツを認識したと判定された場合、車線維持支援部150は、ボッツドッツの道路環境に対応する車線維持支援を行う(ステップS213→S215)。一方、ステップS213において、ボッツドッツを認識していないと判定された場合、車線維持支援部150は、道路環境認識部140が路面画像を画像認識した結果、カープールレーンを認識したか否かを判定する(ステップS213→S214)。
【0045】
ステップS214において、カープールレーンを認識したと判定された場合、車線維持支援部150は、カープールレーンの道路環境に対応する車線維持支援を行う(ステップS214→S215)。一方、ステップS214において、カープールレーンを認識していないと判定された場合、車線維持支援部150は処理を終了する。
【0046】
このように、本発明によれば、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置、及び車線維持支援方法を提供することができる。
【0047】
また、本発明によれば、絞り込んだ道路環境の中から車両が現在走行している道路環境がボッツドッツ、又はカープールレーン、分岐、合流、又は交差点、工事区間、又は渋滞区間であることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置、及び車線維持支援方法を提供することができる。
【0048】
上記実施の形態で説明した構成は、単に具体例を示すものであり、本願発明の技術的範囲を制限するものではない。本願の効果を奏する範囲において、任意の構成を採用することが可能である。
【産業上の利用可能性】
【0049】
車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置等として有用である。
【図面の簡単な説明】
【0050】
【図1】本発明の実施の形態に係る車線維持支援装置の全体構成を示すブロック図
【図2】本発明の実施の形態に係る車線維持支援装置の動作を示すフロー図
【図3】線なし分岐の一例を示す模式図
【図4】線なし合流の一例を示す模式図
【図5】ボッツドッツの一例を示す模式図
【図6】カープールレーンの一例を示す模式図
【符号の説明】
【0051】
100 車線維持支援装置
110 道路環境記憶部
120 国情報取得部
130 道路環境取得部
140 道路環境認識部
150 車線維持支援部
【技術分野】
【0001】
本発明は、車線維持支援装置、及び車線維持支援方法に関し、より特定的には、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置、及び車線維持支援方法に関する。
【背景技術】
【0002】
従来、車両が走行する際の車線維持を支援する技術として、撮像した路面画像から区画線を認識し、区画線から認識した道路環境に即した車線維持支援を行う技術が提案されている(例えば、特許文献1参照)。
【特許文献1】特開2005−4442号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述した従来の技術では、路面画像から道路環境の認識が困難である場合、例えば、区画線が2本以上の線からなる場合、区画線が円形タイルである場合、区画線無しの分岐である場合、又は区画線無しの合流である場合等の道路環境を有する外国の道路では、道路環境を認識するまでの処理負荷が大きいため、認識した道路環境に即した車線維持支援を行うには効率的ではない。また、特殊な道路環境に対応するための専用の認識ロジックを常時作動させると誤動作に繋がり易い。
【0004】
そこで、本発明は、上記問題に鑑みてなされた。すなわち、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができると共に、誤作動させることなく車線維持支援を行うことができる車線維持支援装置、及び車線維持支援方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第1の局面は、道路を走行する車両の車線維持を支援する車線維持支援装置に向けられている。本発明は、国と当該国の道路環境とを関連付けて記憶する道路環境記憶部と、車両が現在走行している国を示す国情報を取得する国情報取得部と、国情報取得部が取得した国情報に基づいて、道路環境記憶部を参照し、車両が現在走行している国の道路環境の情報を取得する道路環境取得部と、道路環境取得部が取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から車両が現在走行している道路環境を認識する道路環境認識部と、道路環境認識部が認識した道路環境に対応する車線維持支援を行う車線維持支援部とを備える。
【0006】
これにより、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置を提供することができる。
【0007】
また、道路環境の情報は、ボッツドッツ、又はカープールレーンを示す区分線情報であることが好ましい。
【0008】
これにより、絞り込んだ道路環境の中から車両が現在走行している道路環境がボッツドッツ、又はカープールレーンであることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置を提供することができる。
【0009】
また、道路環境の情報は、分岐、合流、又は交差点を示す分岐情報であることが好ましい。
【0010】
これにより、絞り込んだ道路環境の中から車両が現在走行している道路環境が分岐、合流、又は交差点であることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置を提供することができる。
【0011】
また、道路環境の情報は、工事区間、又は渋滞区間を示すテンポラリ情報であることが好ましい。
【0012】
これにより、車線維持支援そのものを停止し、誤作動を低減することができる車線維持支援装置を提供することができる。
【0013】
また、道路環境認識部は、画像認識によって車両が走行している道路環境を認識することが好ましい。
【0014】
これにより、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を画像認識によって認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置を提供することができる。
【0015】
本発明の第2の局面は、道路を走行する車両の車線維持を支援する車線維持支援方法に向けられている。本発明は、車両が現在走行している国を示す国情報を取得する国情報取得ステップと、国情報取得ステップで取得した国情報に基づいて、国と当該国の道路環境とを関連付けて記憶する道路環境記憶部を参照し、車両が現在走行している国の道路環境の情報を取得する道路環境取得ステップと、道路環境取得ステップで取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から車両が現在走行している道路環境を認識する道路環境認識ステップと、道路環境認識ステップで認識した道路環境に対応する車線維持支援を行う車線維持支援ステップとを備える。
【0016】
これにより、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援方法を提供することができる。
【0017】
また、道路環境の情報は、ボッツドッツ、又はカープールレーンを示す区分線情報であることが好ましい。
【0018】
これにより、絞り込んだ道路環境の中から車両が現在走行している道路環境がボッツドッツ、又はカープールレーンであることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援方法を提供することができる。
【0019】
また、道路環境の情報は、分岐、合流、又は交差点を示す分岐情報であることが好ましい。
【0020】
これにより、絞り込んだ道路環境の中から車両が現在走行している道路環境が分岐、合流、又は交差点であることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援方法を提供することができる。
【0021】
また、道路環境の情報は、工事区間、又は渋滞区間を示すテンポラリ情報であることが好ましい。
【0022】
これにより、絞り込んだ道路環境の中から車両が現在走行している道路環境が工事区間、又は渋滞区間であることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援方法を提供することができる。
【0023】
また、道路環境認識ステップでは、画像認識によって車両が走行している道路環境を認識することが好ましい。
【0024】
これにより、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を画像認識によって認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援方法を提供することができる。
【発明の効果】
【0025】
以上説明したように、本発明の各局面によれば、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置、及び車線維持支援方法を提供することができる。
【発明を実施するための最良の形態】
【0026】
(実施形態)
以下本発明の実施の形態に係る車線維持支援装置について図面に従って詳細に説明する。
【0027】
図1は、本発明の実施の形態に係る車線維持支援装置の全体構成を示すブロック図である。図1において、車線維持支援装置100は、道路環境記憶部110、国情報取得部120、道路環境取得部130、道路環境認識部140、及び車線維持支援部150を備える。
【0028】
道路環境記憶部110は、国と当該国の道路環境とを関連付けて記憶する、例えばRAM、ROM、又はHDD等のメモリである。
【0029】
国情報取得部120は、ナビゲーション装置によって車両の現在位置を計測し、計測された現在位置に基づいて地図データを参照し、当該車両が現在走行している国を示す情報を取得する。
【0030】
道路環境取得部130は、国情報取得部120が取得した国情報に基づいて、道路環境記憶部110を参照し、車両が現在走行している国の道路環境の情報、例えば図3に示すような線なし分岐の情報、図4に示すような線なし合流の情報、図5に示すようなボッツドッツの情報、又は図6に示すようなカープールレーンの情報を取得する。なお、道路環境の情報は、分岐、合流、又は交差点を示す分岐情報であってもよいし、工事区間、又は渋滞区間を示すテンポラリ情報であってもよい。
【0031】
道路環境認識部140は、道路環境取得部130が取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から、車両周辺をカメラによって撮像した画像を画像認識することによって車両が現在走行している道路環境を認識する。
【0032】
車線維持支援部150は、道路環境認識部140が認識した道路環境に対応する車線維持支援を行う。
【0033】
以下、本発明の実施の形態に係る車線維持支援装置100の動作について図2に示すフロー図に従って説明する。
【0034】
まず、国情報取得部120は、ナビゲーション装置から車両が現在走行している国を示す情報を取得する。道路環境取得部130は、国情報取得部120が取得した国情報に基づいて、道路環境記憶部110を参照し、車両が現在走行している国の道路環境の情報を取得する(ステップS201)。
【0035】
次に、道路環境認識部140は、道路環境取得部130が取得した道路環境の情報に基づき、線なし分岐がある国か否かを判定する(ステップS202)。
【0036】
ステップS202において、線なし分岐がある国であると判定された場合、道路環境認識部140は、線なし分岐がある旨の情報を記憶する(ステップS202→S206)。一方、ステップS202において、線なし分岐がない国であると判定された場合、道路環境認識部140は、道路環境取得部130が取得した道路環境の情報に基づき、線なし合流がある国であるか否かを判定する(ステップS202→S203)。
【0037】
ステップS203において、線なし合流がある国であると判定された場合、道路環境認識部140は、線なし合流がある旨の情報を記憶する(ステップS203→S207)。一方、ステップS203において、線なし合流がない国であると判定された場合、道路環境認識部140は、道路環境取得部130が取得した道路環境の情報に基づき、ボッツドッツがある国であるか否かを判定する(ステップS203→S204)。
【0038】
ステップS204において、ボッツドッツがある国であると判定された場合、道路環境認識部140は、ボッツドッツがある旨の情報を記憶する(ステップS204→S208)。一方、ステップS204において、ボッツドッツがない国であると判定された場合、道路環境認識部140は、道路環境取得部130が取得した道路環境の情報に基づき、カープールレーンがある国であるか否かを判定する(ステップS204→S205)。
【0039】
ステップS205において、カープールレーンがある国であると判定された場合、道路環境認識部140は、カープールレーンがある旨の情報を記憶する(ステップS205→S209)。一方、ステップS205において、カープールレーンがない国であると判定された場合、道路環境認識部140は処理を終了する。
【0040】
車両が現在走行している国の道路環境の情報が取得され、記憶されると、道路環境認識部140は、記憶された道路環境の中から、車両が現在走行している道路環境を、路面画像を画像認識することによって認識する(ステップS210)。
【0041】
次に、車線維持支援部150は、道路環境認識部140が路面画像を画像認識した結果、線なし分岐を認識したか否かを判定する(ステップS211)。
【0042】
ステップS211において、線なし分岐を認識したと判定された場合、車線維持支援部150は、線なし分岐の道路環境に対応する車線維持支援を行う(ステップS211→S215)。一方、ステップS211において、線なし分岐を認識していないと判定された場合、車線維持支援部150は、道路環境認識部140が路面画像を画像認識した結果、線なし合流を認識したか否かを判定する(ステップS211→S212)。
【0043】
ステップS212において、線なし合流を認識したと判定された場合、車線維持支援部150は、線なし合流の道路環境に対応する車線維持支援を行う(ステップS212→S215)。一方、ステップS212において、線なし合流を認識していないと判定された場合、車線維持支援部150は、道路環境認識部140が路面画像を画像認識した結果、ボッツドッツを認識したか否かを判定する(ステップS212→S213)。
【0044】
ステップS213において、ボッツドッツを認識したと判定された場合、車線維持支援部150は、ボッツドッツの道路環境に対応する車線維持支援を行う(ステップS213→S215)。一方、ステップS213において、ボッツドッツを認識していないと判定された場合、車線維持支援部150は、道路環境認識部140が路面画像を画像認識した結果、カープールレーンを認識したか否かを判定する(ステップS213→S214)。
【0045】
ステップS214において、カープールレーンを認識したと判定された場合、車線維持支援部150は、カープールレーンの道路環境に対応する車線維持支援を行う(ステップS214→S215)。一方、ステップS214において、カープールレーンを認識していないと判定された場合、車線維持支援部150は処理を終了する。
【0046】
このように、本発明によれば、車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置、及び車線維持支援方法を提供することができる。
【0047】
また、本発明によれば、絞り込んだ道路環境の中から車両が現在走行している道路環境がボッツドッツ、又はカープールレーン、分岐、合流、又は交差点、工事区間、又は渋滞区間であることを認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置、及び車線維持支援方法を提供することができる。
【0048】
上記実施の形態で説明した構成は、単に具体例を示すものであり、本願発明の技術的範囲を制限するものではない。本願の効果を奏する範囲において、任意の構成を採用することが可能である。
【産業上の利用可能性】
【0049】
車両が現在走行している国を特定し、特定した国特有の道路環境に絞り込み、絞り込んだ道路環境の中から車両が現在走行している道路環境を認識して車線維持支援を行うことで、処理負荷を低減した効率的な車線維持支援を行うことができる車線維持支援装置等として有用である。
【図面の簡単な説明】
【0050】
【図1】本発明の実施の形態に係る車線維持支援装置の全体構成を示すブロック図
【図2】本発明の実施の形態に係る車線維持支援装置の動作を示すフロー図
【図3】線なし分岐の一例を示す模式図
【図4】線なし合流の一例を示す模式図
【図5】ボッツドッツの一例を示す模式図
【図6】カープールレーンの一例を示す模式図
【符号の説明】
【0051】
100 車線維持支援装置
110 道路環境記憶部
120 国情報取得部
130 道路環境取得部
140 道路環境認識部
150 車線維持支援部
【特許請求の範囲】
【請求項1】
道路を走行する車両の車線維持を支援する車線維持支援装置であって、
国と当該国の道路環境とを関連付けて記憶する道路環境記憶部と、
前記車両が現在走行している国を示す国情報を取得する国情報取得部と、
前記国情報取得部が取得した国情報に基づいて、前記道路環境記憶部を参照し、前記車両が現在走行している国の道路環境の情報を取得する道路環境取得部と、
前記道路環境取得部が取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から前記車両が現在走行している道路環境を認識する道路環境認識部と、
前記道路環境認識部が認識した道路環境に対応する車線維持支援を行う車線維持支援部とを備える、車線維持支援装置。
【請求項2】
前記道路環境の情報は、ボッツドッツ、又はカープールレーンを示す区分線情報であることを特徴とする、請求項1に記載の車線維持支援装置。
【請求項3】
前記道路環境の情報は、分岐、合流、又は交差点を示す分岐情報であることを特徴とする、請求項1に記載の車線維持支援装置。
【請求項4】
前記道路環境の情報は、工事区間、又は渋滞区間を示すテンポラリ情報であることを特徴とする、請求項1に記載の車線維持支援装置。
【請求項5】
前記道路環境認識部は、画像認識によって前記車両が走行している道路環境を認識することを特徴とする、請求項1〜4のいずれかに記載の車線維持支援装置。
【請求項6】
道路を走行する車両の車線維持を支援する車線維持支援方法であって、
前記車両が現在走行している国を示す国情報を取得する国情報取得ステップと、
前記国情報取得ステップで取得した国情報に基づいて、国と当該国の道路環境とを関連付けて記憶する道路環境記憶部を参照し、前記車両が現在走行している国の道路環境の情報を取得する道路環境取得ステップと、
前記道路環境取得ステップで取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から前記車両が現在走行している道路環境を認識する道路環境認識ステップと、
前記道路環境認識ステップで認識した道路環境に対応する車線維持支援を行う車線維持支援ステップとを備える、車線維持支援方法。
【請求項7】
前記道路環境の情報は、ボッツドッツ、又はカープールレーンを示す区分線情報であることを特徴とする、請求項6に記載の車線維持支援方法。
【請求項8】
前記道路環境の情報は、分岐、合流、又は交差点を示す分岐情報であることを特徴とする、請求項6に記載の車線維持支援方法。
【請求項9】
前記道路環境の情報は、工事区間、又は渋滞区間を示すテンポラリ情報であることを特徴とする、請求項6に記載の車線維持支援方法。
【請求項10】
前記道路環境認識ステップでは、画像認識によって前記車両が走行している道路環境を認識することを特徴とする、請求項6〜9のいずれかに記載の車線維持支援方法。
【請求項1】
道路を走行する車両の車線維持を支援する車線維持支援装置であって、
国と当該国の道路環境とを関連付けて記憶する道路環境記憶部と、
前記車両が現在走行している国を示す国情報を取得する国情報取得部と、
前記国情報取得部が取得した国情報に基づいて、前記道路環境記憶部を参照し、前記車両が現在走行している国の道路環境の情報を取得する道路環境取得部と、
前記道路環境取得部が取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から前記車両が現在走行している道路環境を認識する道路環境認識部と、
前記道路環境認識部が認識した道路環境に対応する車線維持支援を行う車線維持支援部とを備える、車線維持支援装置。
【請求項2】
前記道路環境の情報は、ボッツドッツ、又はカープールレーンを示す区分線情報であることを特徴とする、請求項1に記載の車線維持支援装置。
【請求項3】
前記道路環境の情報は、分岐、合流、又は交差点を示す分岐情報であることを特徴とする、請求項1に記載の車線維持支援装置。
【請求項4】
前記道路環境の情報は、工事区間、又は渋滞区間を示すテンポラリ情報であることを特徴とする、請求項1に記載の車線維持支援装置。
【請求項5】
前記道路環境認識部は、画像認識によって前記車両が走行している道路環境を認識することを特徴とする、請求項1〜4のいずれかに記載の車線維持支援装置。
【請求項6】
道路を走行する車両の車線維持を支援する車線維持支援方法であって、
前記車両が現在走行している国を示す国情報を取得する国情報取得ステップと、
前記国情報取得ステップで取得した国情報に基づいて、国と当該国の道路環境とを関連付けて記憶する道路環境記憶部を参照し、前記車両が現在走行している国の道路環境の情報を取得する道路環境取得ステップと、
前記道路環境取得ステップで取得した情報の示す道路環境に絞り込み、当該絞り込んだ道路環境の中から前記車両が現在走行している道路環境を認識する道路環境認識ステップと、
前記道路環境認識ステップで認識した道路環境に対応する車線維持支援を行う車線維持支援ステップとを備える、車線維持支援方法。
【請求項7】
前記道路環境の情報は、ボッツドッツ、又はカープールレーンを示す区分線情報であることを特徴とする、請求項6に記載の車線維持支援方法。
【請求項8】
前記道路環境の情報は、分岐、合流、又は交差点を示す分岐情報であることを特徴とする、請求項6に記載の車線維持支援方法。
【請求項9】
前記道路環境の情報は、工事区間、又は渋滞区間を示すテンポラリ情報であることを特徴とする、請求項6に記載の車線維持支援方法。
【請求項10】
前記道路環境認識ステップでは、画像認識によって前記車両が走行している道路環境を認識することを特徴とする、請求項6〜9のいずれかに記載の車線維持支援方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−73130(P2010−73130A)
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願番号】特願2008−242782(P2008−242782)
【出願日】平成20年9月22日(2008.9.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願日】平成20年9月22日(2008.9.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]