
車色判別装置
【課題】 従来の車両識別装置は、ナンバープレートのみによって車両を識別していたために、プレートの曲がりや汚れ等によって一部文字が認識できないと、車両を確実に特定できないという問題点があった。
【解決手段】 道路上に設置され通過車両のカラー画像を出力するカメラからの画像を入力し、その画像データの中からボンネット等の車両の塗色を判定する判別エリアを抽出する判別エリア設定手段と、上記判別エリア設定部で判定されたエリアの色名を判定する色識別手段を備え、通過車両の塗色を判別する。
【解決手段】 道路上に設置され通過車両のカラー画像を出力するカメラからの画像を入力し、その画像データの中からボンネット等の車両の塗色を判定する判別エリアを抽出する判別エリア設定手段と、上記判別エリア設定部で判定されたエリアの色名を判定する色識別手段を備え、通過車両の塗色を判別する。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】この発明は、画像処理技術を用いて車両の塗装色を判定する車色判別装置に関するものである。
【0002】
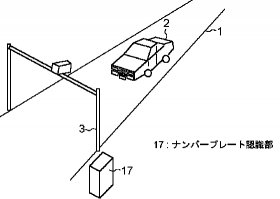
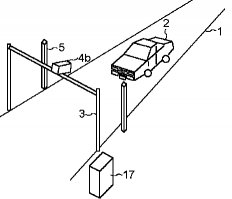
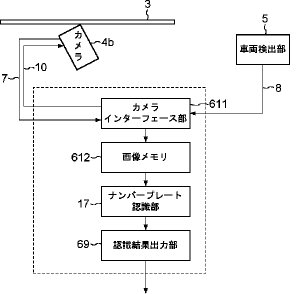
【従来の技術】図25は従来から駐車場や管理区域の入出庫管理等に用いられる車両識別装置の概念図である。図25において、1は進入路、2は進入してくる車両、3は進入路上に設置され、白黒カメラ4bを取り付けるための支柱である。また5は車両の到着を検出する車両検出部、17はカメラ4bからの画像信号から車両のナンバープレートに記載されているナンバーを判別するナンバー認識部である。
【0003】従来装置の構成の一例を図26に示し、動作の概要を以下に説明する。図26において、まず車両検出部5は光電スイッチ等によって構成され、車両がカメラ4bで撮影する領域を通過したことを検出し、車両検知を示すパルス信号である車両検知信号8をカメラインターフェース部611に出力する。カメラインターフェース部611はこの車両検知のパルス信号を受けてカメラ4bに対して撮影トリガ信号10を出力し、カメラ4bはこの撮影トリガ信号10をトリガとして、車両を撮影しビデオ信号7をカメラインターフェース部611に出力する。更にカメラインターフェース部611で受信されたビデオ信号7はA/D変換され画像メモリ612に記憶される。ナンバー認識部17では、この画像メモリ612に記憶された画像データを読み出し、画像データ中の黒画素と白画素の分布から所定の手順にしたがってナンバーの認識を行い、結果を認識結果出力部69から出力していた。このように、従来の車両識別装置は、ナンバープレートのナンバーを認識することによって車両の識別を行っていた。
【0004】
【発明が解決しようとする課題】従来の車両識別装置は、ナンバープレートのみによって車両を識別していたために、プレートの曲がりや汚れ等によってナンバーの一部文字が認識できないと、車両を確実に特定できないという問題点があった。
【0005】この発明に係る車色判別装置は、このような課題を解決するために、従来のナンバープレートの画像認識を用いた車両識別方法以外の車両識別方法を用いて車両を識別することができるものを得ることを目的とする。また、ナンバープレートの画像認識を用いた車両識別の特定精度を向上させることを目的とする。
【0006】
【課題を解決するための手段】第1の発明による車色判別装置は、路上に設置されカラー画像を取得するカメラと、前記カメラの視野内への車両の進入を検出する車両検出手段と、前記車両検出手段による前記車両の検出に応じて、前記カメラで取得された画像中の濃度分布に基づいて前記車両の特定部位に対応する画像の判別エリアを抽出する判別エリア設定手段と、前記判別エリア設定手段で抽出された判別エリア内の画像における色情報に基づいて前記車両の色を識別する色識別手段とを備えたものである。
【0007】また、第2の発明による車色判別装置は、第1の発明において、前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の平均輝度値を計算し、このRGBの各平均輝度値から白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合にRGBの平均輝度値に対応する色度図に基づいて色名を判定する色判定手段とを備えたものである。
【0008】第3の発明による車色判別装置は、第1の発明において、前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の平均輝度値を計算し、このRGBの各平均輝度値から白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合にRGBの各平均輝度値の相対比率を求め、それぞれの相対比率とあらかじめ設定された基準値との差の二乗平均値に基づいて色名を判定する色判定手段とを備えたものである。
【0009】第4の発明による車色判別装置は、第1の発明において、前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の各平均輝度値の相対比率を求め、それぞれの相対比率から明度を算出し、その算出された明度に基づいて白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合に前記各平均輝度値の相対比率から色相、彩度を算出し、あらかじめ基準色の色相、彩度を記憶した色分類表に基づいてこの算出された色相、彩度に対応する色名を判定する色判定手段とを備えたものである。
【0010】第5の発明による車色判別装置は、第4の発明において、前記色判定手段は、前記算出された彩度に基づいて灰色を区別する灰色判定部を備えたものである。
【0011】第6の発明による車色判別装置は、第1の発明において、前記車両検出手段は前記カメラで取得された画像からナンバープレートを抽出して車両の進入を検出する手段を備えたものである。
【0012】第7の発明による車色判別装置は、第1の発明において、前記判別エリア設定手段は前記車両の特定部位に対応する判別エリアを複数の小領域が結合された領域として抽出する手段を備え、前記色識別手段は前記判別エリア設定手段で抽出された複数の小領域毎にその色情報に基づいて対応する色名を識別し、この識別された色名毎に判別エリア内におけるその色を有する小領域の数を算出し、その算出結果を所定値と比較して複数色に塗り分けられた車両の色を判定する手段とを備えたものである。
【0013】第8の発明による車色判別装置は、第1の発明において、前記カメラのシャッタタイミングに同期して可視光を発光する照明部を備えたものである。
【0014】第9の発明による車色判別装置は、第1の発明において、前記色識別手段で識別された色情報と共に前記判別エリア設定手段で抽出された判別エリアの画像情報を伝送する画像伝送部と、この画像伝送部から伝送された情報を受信し、その受信された色情報と画像情報を表示する表示部とを備えたものである。
【0015】第10の発明による車色判別装置は、第1の発明において、前記色識別手段で識別された色情報と共に前記判別エリア設定手段で抽出された判別エリアの画像におけるRGB値を伝送する画像伝送部と、この画像伝送部から伝送された情報を受信し、その受信されたRBG値から元の色を再現した画像と色情報を表示する表示部とを備えたものである。
【0016】第11の発明による車色判別装置は、第1の発明において、前記カメラで取得された画像中から前記車両のナンバープレートを検出し、この検出されたナンバープレートのナンバーを読み取るナンバープレート認識手段と、このナンバープレート認識手段から出力される前記車両のナンバー情報および前記色識別部から得られる車色情報を予め登録した車両と照合し、合致した場合に一致信号を出力する照合装置とを備えたものである。
【0017】第12の発明による車色判別装置は、第1の発明において、前記カメラで取得された画像中から前記車両のナンバープレートを検出するナンバープレート検出手段と、前記ナンバープレート検出手段の検出に応じて前記車両までの距離を測定する測距手段と、前記測距手段で測定された前記車両までの距離の時間変化から前記車両の寸法または形状を測定し、この測定結果とあらかじめ設定された車両に対応した寸法または形状との比較により車種を判別する車種判別手段と、前記ナンバープレート検出手段で検出されたナンバープレートのナンバーを読み取るナンバープレート認識手段と、前記車種判別手段で判別された車種、前記ナンバープレート認識手段から出力される前記車両のナンバー情報および前記色識別部から得られる車色情報を予め登録した車両と照合し、合致した場合に一致信号を出力する照合装置を備えたものである。
【0018】第13の発明による車色判別装置は、第1の発明において、前記カメラで撮影された画像を逐次伝送する画像伝送手段と、前記画像伝送手段で伝送された画像を受信し、この受信した画像を前記判別エリア設定手段に出力する受信手段とを具備したものである。
【0019】
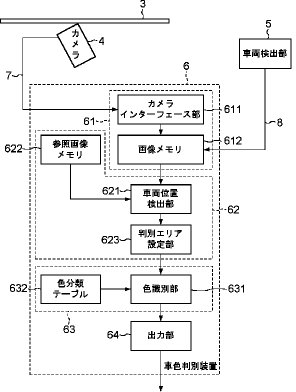
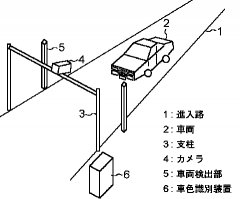
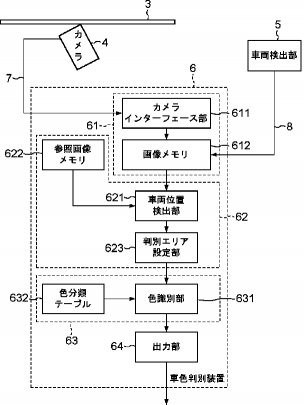
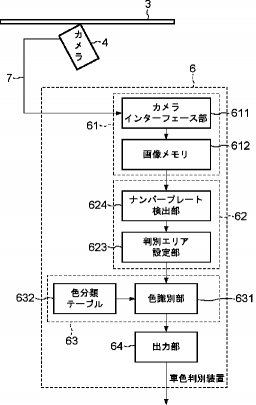
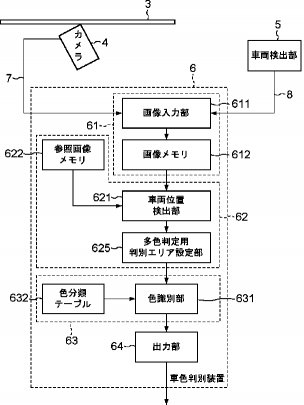
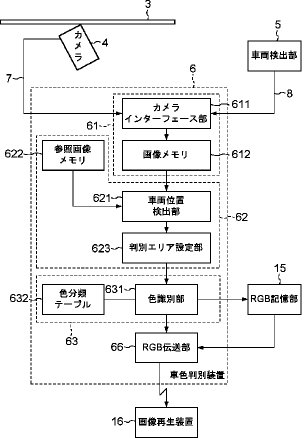
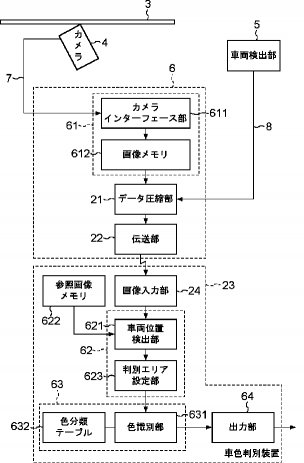
【発明の実施の形態】実施の形態1.図1および図2は、それぞれこの発明の実施の形態1を示す外観図および構成図であり、図1、図2において1〜3は図25に示す従来例と同様の機能を持つものであり、1は進入路、2は進入してくる車両、3は進入路上に設置された支柱であり、4は支柱3のアームに取付けられ通過する車両のカラー画像を撮像するためのカメラ、5はカメラ4の撮像位置に車両が到着したことを検出する車両検出部、6はカメラ4からのビデオ信号を入力し、車両の色を識別する車色識別装置である。車色識別装置6は更に、カメラ4から出力された画像を入力し記憶する画像入力部61、上記画像入力部61で記憶された塗色を判別するための領域(以下判別エリアと称する)を設定する判別エリア設定部62、上記判別エリア設定部62で設定された判別エリアの色を判定する車色判定部63、車色判定部63で判定された結果を出力する出力部64からなる。
【0020】実施の形態1に示す車色識別装置の動作の一例について以下に説明する。上記の装置において、カメラ4は常時進入路上の所定の位置の画像を撮像し、ビデオ信号7を出力する。車色識別装置6ではまず画像入力部61のカメラインターフェース部611でビデオ信号をA/D変換し、画像メモリ612に順次格納する。車両検出部5はカメラ4の撮像位置に車両が到着したことを検知し、処理をするためのトリガとして車両検知信号8を出力する。判別エリア設定部62の車両位置検出部621では、車両検出部5からの車両検知信号8を受信した時点で画像メモリ612に格納された画像を処理対象画像として画像メモリ612から選択して読み出す。なお、本実施例では、画像を連続的に入力し、後で車両検知信号8とANDをとって車両の特定を行っているが、車両検知信号8をトリガとして、カメラ4により撮影地点に達した車両の画像を1枚だけ撮像することも可能である。
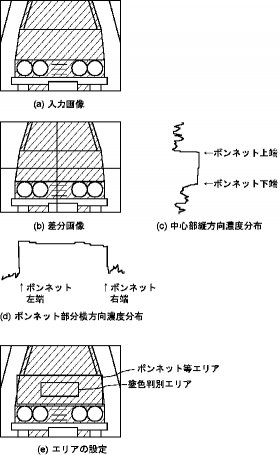
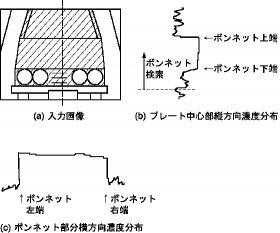
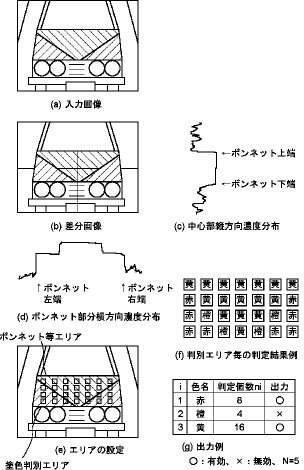
【0021】次に判別エリアを設定する画像処理方法の例について示す。まず、車両位置検出部621では画像中から車両のみを抽出するために、参照画像メモリ622に格納されている例えば車両が無い場合の背景画像である参照画像と、処理対象画像として画像メモリ612から選択して読み出した画像について、画像間差分等の一般的な画像処理の手法を用い、移動物体として車両の概略位置を特定する(図3(a)、図3(b))。判別エリア設定部623では、車両の塗色を判別する部分として、ボンネット等の塗装面を対象として検出するために、入力画像の車両位置の縦方向の1ラインまたは複数ラインの濃度分布を求める(図3(c))。ボンネット等は一般的に濃度分布が一様なため、濃度変化率の少ない部分としてその位置を特定する。次に縦方向で検出されたボンネット等の位置に対して横方向に濃度分布をとり(図3(d))、同様の手法によってボンネット等位置の横方向を特定する。さらに判別エリア設定部623において、実際に塗装色を判別する判別エリアは、この特定したボンネット等の位置の内部で一定の面積が切り出される。なお、例えばカメラでの撮像範囲が2m程度であって車両が画面の中で大きな面積を占め、かつ車両検出部5からの車両検知信号8によって画面上での車両の撮影位置が安定する場合は、画面の殆どを車両が占め、処理上道路を含む背景の影響を殆ど受けないため、参照画像メモリ622を用いた車両位置検出部621における車両位置の検出処理は省略することができる。
【0022】車色判別部63の色識別部631では、まず上記判別エリア設定部62で設定された判別エリア内のR(赤)、G(緑)、B(青)の各成分の平均輝度値を求める。色分類テーブル632では予めR(赤)、G(緑)、B(青)の各輝度値と色名の対応表を設定しておき、色識別部631では求めた平均輝度値に対応する色の名前を色分類テーブル632を参照することによって選択し、出力部64を経由して結果を出力する。
【0023】このようにこの実施の形態によれば、ナンバープレートのナンバーとは全く異なる車両の特徴の1つである車両の色を識別することができる。従来ナンバープレートのナンバー認識によって行われていた車両の特定において、一部文字が認識できない場合には読めた文字のみから特定することになるので、対象範囲が広がり完全には特定できないが、このような場合でも車色の情報を併せて判定項目に盛り込むことによって対象範囲を絞り込むことが可能となり、特定の精度を向上させることができる。更に、駐車場や施設の管理設備のように予め登録しておいた車両との照合を行う場合、ナンバーと色の両方の情報を登録情報と比較することによって、ナンバーが一致していても色が合致しないと登録車両と認めない等の方法をとることができ、ナンバーを誤って認識した場合のチェックも行うことができ、信頼度が向上する。
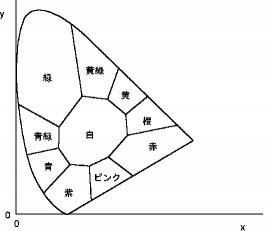
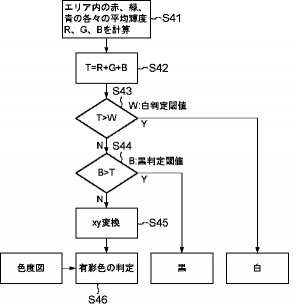
【0024】実施の形態2.実施の形態2に係る発明においては、図2に示す色識別部631において、図4に示すようなアルゴリズムで判定を行う判定回路を有する。図4では色識別部631の処理内容のみを示しており、他の部分の構成と動作は図2と同様である。まず色識別部631の白黒判定手段において塗色判別エリア内のR(赤)、G(緑)、B(青)各成分の平均輝度を求める(S41)。次にR(赤)、G(緑)、B(青)各成分の和Tを計算する(S42)。Tは画像全体の明るさを示すので、まずTが白レベル判定値Wより大きい場合は白とし(S43)、Tが黒レベル判定値Bより小さい場合は黒と判定する(S44)。次に色識別部631の色判定手段において、R(赤)、G(緑)、B(青)、をxy変換する(S45)。xy変換はCIE(国際照明委員会、Commission Internationale d’Eclairage)にて規定されている方式を用い、X=0.49000R+0.31000G+O.20000BY=0.17697R+0.81240G+0.01063Bとする。更に色判定手段において、色分類テーブル632としては、図5に摸式的に示すようなCIEにて規定されている色度図と同様の形式の分類表を用い、上記で計算したxy値を図5上に当てはめて該当する部分の色名を選択する(S46)。ただし、屋外の車両撮影に関しては同じ色であっても環境条件によって見え方に差があり、細かい判別は困難であることから、色分類テーブル632としては、図5に示すように数色程度の分類とする。
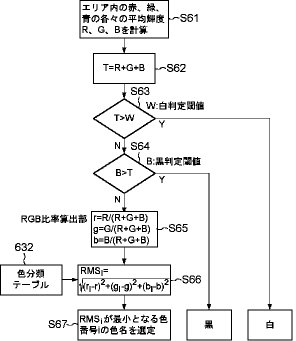
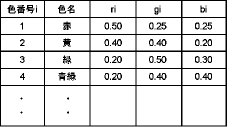
【0025】実施の形態3.実施の形態3に係る発明においては、図2に示す色識別部631において図6に示すようなアルゴリズムで判定を行う回路を有する。色識別部631の白黒判定手段では、まず白と黒に関しては実施の形態2の図4(S41〜S44)に示した方法にて判定するが(図6のS61〜S64に相当)、黒白に該当しなかった場合は、判別エリア設定部62で設定された領域の画像のR(赤)、G(緑)、B(青)の各成分の相対比率r、g、bを求める(図6のS65)。一方、色分類テーブル632において、図7に示すように予め基準となる複数の色に対応するri 、gi 、bi 値を記憶しておく。色判定手段は、先に求めた入力画像の色成分の相対比率r、g、bと基準値との差の二乗平均RMSi を数1に基づいて計算し(図6のS66)、その値が最小となる色番号iに対応する色名を対象車両の塗色と判定する(図6のS67)。
【0026】
【数1】

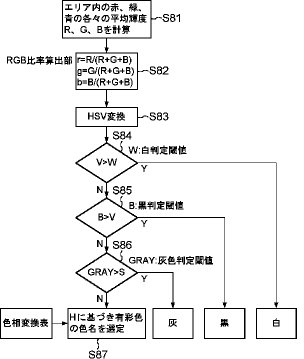
【0027】実施の形態4.実施の形態4に係る発明においては、図2に示す色識別部631において図8に示すようなアルゴリズムで判定を行う回路を有する。まず色識別部631の白黒判定手段において塗色判別エリア内のR(赤)、G(緑)、B(青)各成分の平均輝度を求める(S81)。次にR(赤)、G(緑)、B(青)の各成分の相対比率r、g、bを求める(S82)。更に入力画像の相対比率r、g、bからHSV変換を用いて、色相(H)、彩度(S)、明度(V)を計算し(S83)、まず明度(V)によって白、黒を判定し(S84、S85)、次に色識別部631の色判定手段では、彩度(S)によって灰色を決定し(S86)、最後に色相(H)によって図9に示す様なマルセル色相環に基づいた変換表によって変換表によって色相Hに対応する色名を判定する(S87)。HSV変換については既にいくつかの式が公知であるが、例えば、Rainesの定義による下式を用いる。
【0028】
【数2】
【0029】なお、色相変換表は色分類テーブル632に記憶される。
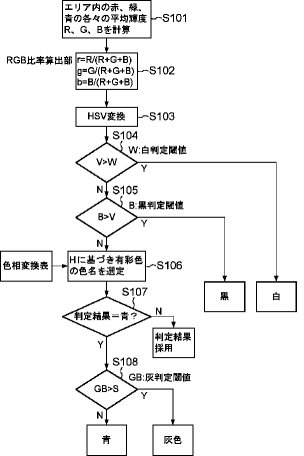
【0030】実施の形態5.実施の形態5に係る発明において、図2に示す色識別部631に図10に示すようなアルゴリズムで判定を行う灰色判定部を有する。まず色識別部631の白黒判定手段において塗色判別エリア内のR(赤)、G(緑)、B(青)各成分の平均輝度を求める(S101)。次にR(赤)、G(緑)、B(青)の各成分の相対比率r、g、bを求める(S102)。更に入力画像の相対比率r、g、bからHSV変換を用いて、色相(H)、彩度(S)、明度(V)を計算し(S103)、明度(V)によって白、黒を判定する(S104、S105)。次に色識別部631の色判定手段では、色相(H)を計算し、図9に示すものと同様な形式の変換表によって色名を判定する。一般に、カメラ4の特性によって実際の被写体は灰色であってもカメラ出力が何れかの色に偏る場合があるため、色相での判定によって特定の色名に判定された場合にのみ彩度(S)によって灰色か否かを判定する。例えば、RGBの内B(青)が強いカメラでは灰色であってもRGBのバランスが崩れて青と判定されるため、一旦青色と判定した後(S107)、彩度(S)によって、青と灰の区別を行うものである(S108)。
【0031】実施の形態6.実施の形態6に係る発明の車両識別装置の構成図を図11に示す。図11においてナンバープレート検出部624は、カメラ4からカメラインターフェース部611を経由して連続的に入力される画像を画像メモリ612から順次読み出し、ナンバープレートを検出する。ナンバープレートの検出方法は従来から用いられている方法を用いるものとし、例えば画像メモリ612から読み出した画像の輝度信号を2値化することによって2値画像を得る。その2値画像の白画素と黒画素の分布と既知であるナンバープレートの文字配列の白画素と黒画素の分布とのマッチングをとることによってプレートの有無を判定する。この処理でプレート有と判断された場合は、その画像を処理対象画像として判別エリア設定部623に送出する。ナンバー周辺は車両のフロントグリルやバンパー等画像の輝度変化が大きい部分であるが、通常その上方には乗用車、トラックに関わらずフロントガラスまでの間に塗色の安定した領域が存在する。図12に示すように、判別エリア設定部623ではナンバープレート位置が既知となるためナンバープレートから上方に輝度変化を探索していく。塗色判別エリアの設定の方法は実施の形態1に示す方法と同様である。この動作によれば、プレート位置がわかっているため、比較的容易に塗色判別エリアを設定することができる。塗色判別エリアが設定された後は、実施の形態1と同様に、色識別部631では、まず上記判別エリア設定部62で設定された領域内のR(赤)、G(緑)、B(青)の各成分の平均輝度値を求める。色分類テーブル632では予めR(赤)、G(緑)、B(青)の各輝度値と色名の対応表を設定しておき、色識別部631では求めた平均輝度値を基に色分類テーブル632を参照して色の名前を選択し、出力部64を経由して結果を出力する。この実施の形態の車色別判別装置によれば、車両検出部が不要になり、コストの低減が図れると共にカメラ設置のみで済むため設置の自由度が増す。更に対象とする画面に確実に車両があることがわかるので、車両以外のものを判定する誤検出を回避することができる。
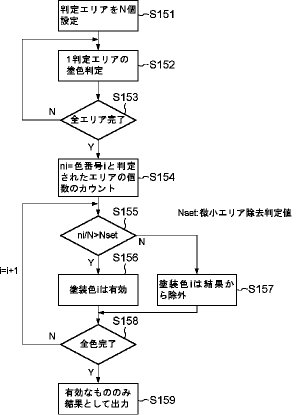
【0032】実施の形態7.実施の形態7に係る発明の構成を図13に示し、図14に処理の概要を図で示し、図15に多色判定用判別エリア設定部625における複数エリアの設定から色識別部631での色名判定までの処理の流れを示す。図13、図14において、まず車両位置検出部621では実施の形態1で示した方法によって車両の位置を特定する。次に多色判定用判別エリア設定部625では、図14(e)に示すようにボンネットと判定された領域内に所定数N個の小さな判別エリアを設定する(図15のS151)。ただしボンネットを特定する場合、2色以上の塗装色で塗装されている車両ではボンネット全面は一様な輝度分布とはならないため、予め設定した以上の長さに亙って輝度変動の無い部分をボンネットと定義する。次に色識別部631では、各判別エリアの全てに対して実施の形態1に示す方法と同様の方法によって、色分類テーブル632を参照して図14(f)のように個別に色判定を行う(図15のS152〜S153)。全エリアの色判定の結果、ある色番号iと判定された判別エリアの個数niの全体に占める割合ni/Nが設定値より小さい場合は飾り等の塗色に関係しない部分として除外し、図14(g)のようにni/Nが設定値以上のもののみ有効とする(図15のS154〜S158)。この処理の結果、有効となった色番号に対応する色名だけを出力部64から出力する(図15のS159)。これによってツートンカラー等複数の色で塗り分けられた車両の色を識別でき、また一部に模様や文字が表示されている場合も全体の色を捉えることができる。
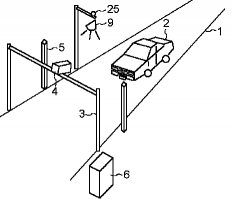
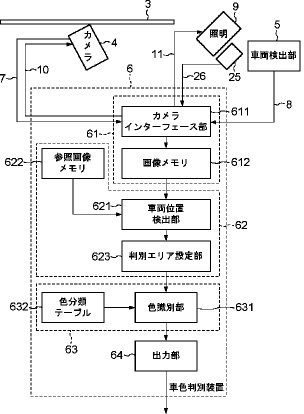
【0033】実施の形態8.実施の形態8に係る発明の車色判別装置の外観図を図16に示す。図16において、1〜6は図1に示すものと同様である。9はカメラ4のシャッタと同期した照明装置である。本車色判別装置は、車両の塗色を判別することを目的としているため、照明にはキセノン等の太陽光のスペクトルに近い光源を用いる。25は周囲の明るさを電気信号に変換する光電センサであり、光量信号26を出力する。信号の流れを図17に示す。図17において、3〜8は図2に示すものと同様である。カメラインターフェース部611からは、車両検出部5からの車両検知信号8を受けると、カメラ4に対して外部同期のシャッタ指令10を出力する。この際、光量信号26が予め設定した値以下であった場合に光量不足と判断し、シャッタ指令10と同時に照明装置9対して発光指令11を出力し、カメラ4からのビデオ信号7を入力し画像メモリ612に記憶する。ビデオ信号7は、照明発光時の画像であって、地下駐車場や屋外の夜間など元々可視光の少ないところであっても十分な輝度を持つ画像を得ることができる。判別エリア設定部623、色識別部631、色分類テーブル632は実施の形態1に示すものと同じ機能を有するものであって、実施の形態1と同じ動作を行い色の判別を行い、出力部64から出力される。また、この実施の形態では照明9から可視の光を照射するが、この際ドライバーに幻惑等の影響を与えないような位置に照明9を設置する。すなわち、対象車両が撮影位置に来た場合に、照射した光が直接ドライバーの目に達しないように、照明9の設置位置はセンサが車両を感知する位置あるいはその後方の真上付近または路側とする。又後方から照射する場合は、カメラ4に対してハレーションを引き起こさないよう、正反射生じない位置とする。更に、照明9はその前面に拡散板を取り付けるなどして、照度むらが出ないようにする。これによって夜または屋内の暗部であっても車色の識別を行うことができる。
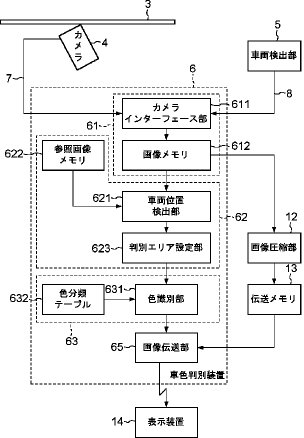
【0034】実施の形態9.実施の形態9に係る発明の車色判別装置の構成図を図18に示す。図18において3〜8までは図2と同様である。12は判別に用いたエリアの画像データを圧縮する画像圧縮部、13は画像圧縮部12で圧縮された画像とその画像の取得時間を伝送するまで一時記憶する伝送メモリであり、複数枚の画像メモリから構成される。更に65は取得時間に基づいて対応付けられた色判定の結果とその時の画像を合わせて自営線などを通じて伝送する画像伝送部である。また14は別の地点に設置され、画像伝送部65から伝送された画像と自動判定した結果の色名をディスプレイ等に表示し、ディスプレイを通して操作員が色名とその画像を比較できる表示装置である。実施の形態9に係る車色判別装置はこのように構成され、カメラ4から画像メモリに入力した画像を画像圧縮部12ですぐに圧縮し、容量を小さくして一時記憶し、画像の番号を管理することにより、小さなメモリ容量で塗色の自動判別終了後その結果を入力画像と合わせて送信することができる。これによって、遠隔地で操作員が目視で自動判別の結果の正否を確認することが可能となり、また自動判別結果の修正も可能となる。
【0035】実施の形態10.実施の形態10に係る発明の車色判別装置の構成図を図19に示す。図19において、15は色識別部631で用いた判別エリア内のR(赤)、G(緑)、B(青)情報を一時記憶するRGB記憶部、66はRGB記憶部15で一時記憶された判別エリアのRGB値とその値を用いて色識別部631で自動判別した色名とを共に伝送するRGB伝送部である。また、16は別の地点に設置され、RGB伝送部66から伝送されたRGB情報から元の色を再現して表示し、自動判定した結果を比較できる画像再生装置である。実施の形態10に係る車色判別装置はこのように構成され、塗色判別に用いた画像情報をRGB値に圧縮して保存、伝送することにより、実施の形態9と比較して少ないメモリと回線容量によって、遠隔地で操作員が目視で自動判別の結果の正否を確認し、また自動判別結果の修正もできるシステムの構築が可能となる。
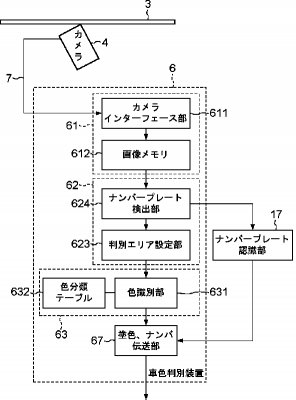
【0036】実施の形態11.実施の形態11に係る発明の車両識別装置の外観図を図20に構成図を図21に示す。図21において、実施の形態6で示したものと同様に、ナンバープレート検出部624は、カメラ4からカメラインターフェース部611を経由して連続的に入力される画像を画像メモリ612から順次読み出し、従来の車番読み取り装置で用いられているパタンマッチングの手法を用いてナンバープレートを検出する。この処理でプレート有と判断された場合は、その画像を処理対象画像として判別エリア設定部623に送出する。一方検出されたナンバープレート部分の画像はナンバープレート認識部17に伝送され、このプレート画像の各文字と予め登録してある基準となる文字パタンとをパタンマッチングする等の従来の車番読み取り装置で用いられている手法を用いてナンバープレートに表示されるナンバーが認識される。車色の識別結果とナンバーの認識結果は合わせて塗色、ナンバ伝送部67から出力される。ナンバー伝送部67から出力された車色の識別結果とナンバーの認識結果は、それぞれ図示しない照合装置において、予め登録された車両の有する車色・ナンバーと照合され、合致した場合に一致信号が出力される。この実施の形態の車色判別装置では、ナンバー情報と車両の塗色情報がわかるため、車両の特定精度が向上する。
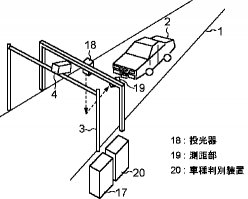
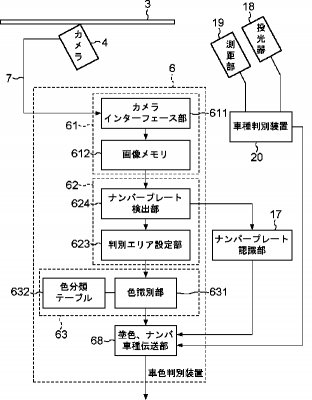
【0037】実施の形態12.実施の形態12に係る発明の車色判別装置の外観図を図22に、構成図を図23に示す。図22、図23において1〜63は、図2と同様であり、図22において、実施の形態6で示したものと同様に、ナンバープレート検出部624は、カメラ4からカメラインターフェース部611を経由して連続的に入力される画像を画像メモリ612から順次読み出し、従来の車番読み取り装置で用いられているパタンマッチングの手法を用いてナンバープレートを検出する。この処理でプレート有と判断された場合は、その画像を処理対象画像として判別エリア設定部623に送出する。一方検出されたナンバープレート部分の画像はナンバープレート認識部17に伝送され、このプレート画像の各文字と予め登録してある基準となる文字パタンとをパタンマッチングする等の従来の車番読み取り装置で用いられている手法を用いて認識される。更に18は進入路1の上部に設けられた、前記ナンバープレート検出部624でのナンバープレートの検出に応じて投光する投光器、19は反射光の位置から車両の進行に応じて車体の高さの時間変化を測定し、進入路1の進行方向における車両の断面形状や寸法を計測する測距部、20は車両の断面形状から車両のセダン、ワンボックス等の種別を判別する車種判別装置、68は車色、ナンバー、車種の結果を合わせて送信する伝送路である。この実施の形態に係る車色判別装置では、実施の形態11に示したナンバー情報と車両の塗色情報に加えて車種判別装置20により車両の寸法や断面形状がわかるため、照合装置において更に車両の特定精度が向上する。なお、この測距部19における測距は、車両の進行方向に垂直な方向の車両までの距離を測定するものであれば、例えば水平に測距しても良く、この場合は車長を測定できる。
【0038】実施の形態13.実施の形態13に係る発明の車色判別装置の構成図を図24に示す。図24において4は車両を撮像するカメラ、5は車両の到着を検出する車両検出部、21は車両検出時の画像のみを圧縮するデータ圧縮部、22は圧縮された画像を伝送する伝送部である。また中央装置23は遠隔地に設置され、複数の伝送部22からのデータを受信、処理するものであって、24は伝送部22からの画像データを受信する画像入力部である。更に、車色識別を行う判別エリア設定部62と車色判定部63は図2に示すものと同様の機能を有するものであり、判別エリア設定部62では、画像中に車両が存在していることがわかっているので、実施の形態1と同様の方法で該当する画像から車両の塗色を判別する判別エリアを設定する。色識別部631では、上記判別エリア設定部で設定された領域の画像のRGBの比率および大きさから予め設定された色分類テーブル632を参照して色の名前を判定し、出力部64を経由して結果を出力する。実施の形態13に係る発明の車色判別装置によれば、各カメラ対応に車色識別機能を持つ必要が無く、中央で一括して持つことができ、大幅なコストダウンができる。また、中央装置において比較的大容量のメモリを持たせることにより、オフラインで塗色判別を行ったり、指定したカメラの塗色判別のみを行うことが可能となるので、自由度の高い運用が可能となる。
【0039】なお、この実施の形態1から13に係る発明は、駐車場や特定施設の入出庫管理以外にも、車両の識別を行うシステムであれば、他のものにも適用できる。
【0040】
【発明の効果】第1の発明によれば、カラー画像による車両の塗色の情報を得ることができる。これによって、従来から行われているナンバープレートの文字情報とは異なる車両の識別情報を得ることができる。
【0041】第2の発明によれば、既存の色度図に沿った色情報を得ることができる。
【0042】第3の発明によれば、基準色との差で色を特定するので、複雑な変換無しに予め設定した色分類に対応した判定結果を得ることができる。
【0043】第4の発明によれば、マンセル色相環に沿った色情報を得ることができる。
【0044】第5の発明によれば、彩度を求めることによって、カメラの色ずれのために灰色がある特定の色に近づく場合に、灰色を識別することができる。
【0045】第6の発明によれば、画像中から直接車両を検出し、塗色判別エリアを設定するので、カメラ以外の車両検出手段が不要となり、コストダウンと設置自由度の向上につながる。
【0046】第7の発明によれば、判別エリア内に小領域を複数設定することにより、複数の色で塗分けられた車両の識別が可能となる。
【0047】第8の発明によれば、シャッタと同期した照明を備えているので、夜間や地下の暗い場所でも使用することができる。
【0048】第9の発明によれば、判定した色名情報と合わせて対象画像を伝送するので、他の地点で色名の正誤を確認、修正することができる。
【0049】第10の発明によれば、判定した色名情報と合わせてRGB情報を伝送するので、他の地点で実際の色を合成して色名の正誤を確認、修正することができる。
【0050】第11の発明によれば、車色識別装置とナンバープレート認識手段を併せ持つために、ナンバー読み取りで一部文字が認識できない場合でも塗色情報を参照することによって、車両の特定精度が向上する。
【0051】第12の発明によれば、車色識別装置とナンバー読み取り装置と車種識別装置を併せ持つために、所定数のナンバー(7ナンバー)読み取りで一部文字が認識できない場合でも塗色情報や車種(車両の形状)を参照することによって、車両の特定精度が向上する。
【0052】第13の発明によれば、画像を伝送することによって別の地点で車色の識別ができるため、道路側に全て車色識別機能を持たせる必要が無くコストダウンが図れ、またナンバー情報が不備なものなど必要に応じて特定の車両について処理を行うことができる。
【図面の簡単な説明】
【図1】 この発明による車色判別装置の実施の形態1の外観を示す概念図である。
【図2】 この発明による車色判別装置の実施の形態1の構成を示す図である。
【図3】 この発明による車色判別装置の実施の形態1の動作を示す図である。
【図4】 この発明による車色判別装置の実施の形態2の動作を説明する図である。
【図5】 この発明による車色判別装置の実施の形態2に示す色度図の概要を説明する図である。
【図6】 この発明による車色判別装置の実施の形態3の動作を説明する図である。
【図7】 この発明による車色判別装置の実施の形態3の色分類テーブルの例を説明する図である。
【図8】 この発明による車色判別装置の実施の形態4の動作を説明する図である。
【図9】 この発明による車色判別装置の実施の形態4の色分類テーブルの例を説明する図である。
【図10】 この発明による車色判別装置の実施の形態5の動作を説明する図である。
【図11】 この発明による車色判別装置の実施の形態6の構成を示す図である。
【図12】 この発明による車色判別装置の実施の形態6の動作を説明する図である。
【図13】 この発明による車色判別装置の実施の形態7の構成を示す図である。
【図14】 この発明による車色判別装置の実施の形態7の動作を説明する図である。
【図15】 この発明による車色判別装置の実施の形態7の動作を説明する図である。
【図16】 この発明による車色判別装置の実施の形態8の外観を示す概念図である。
【図17】 この発明による車色判別装置の実施の形態8の構成を示す図である。
【図18】 この発明による車色判別装置の実施の形態9の構成を示す図である。
【図19】 この発明による車色判別装置の実施の形態10の構成を示す図である。
【図20】 この発明による車色判別装置の実施の形態11の外観を示す概念図である。
【図21】 この発明による車色判別装置の実施の形態11の構成を示す図である。
【図22】 この発明による車色判別装置の実施の形態12の外観を示す概念図である。
【図23】 この発明による車色判別装置の実施の形態12の構成を示す図である。
【図24】 この発明による車色判別装置の実施の形態13の構成を示す概念図である。
【図25】 従来の車色判別装置の外観を示す概念図である。
【図26】 従来の車色判別装置の構成を示す図である。
【符号の説明】
1 進入路、2 対象車両、3 支柱、4 カメラ、4b 白黒カメラ、5車両検出部、6 車色判別装置、7 ビデオ信号、8 車両検知信号、9 照明、10 撮影トリガ信号、11 発光指令、12 画像圧縮部、13 伝送メモリ、14 表示装置、15 RGB記憶部、16 画像再生装置、17 ナンバープレート認識部、18 投光器、19 測距部、20 車種判別装置、21データ圧縮部、22 伝送部、23 中央装置、24 画像入力部、25 光電センサ、26 光量信号、61 画像入力部、62 判別エリア設定部、63車色判定部、64 出力部、65 画像伝送部、66 RGB伝送部、67 塗色ナンバー伝送部、68 塗色ナンバー車種伝送部、68 認識結果出力部、611 カメラインターフェース部、612 画像メモリ、621 車両位置検出部、622 参照画像メモリ、623 判別エリア設定部、624 ナンバープレート検出部、625 多色判定用判別エリア設定部、631 色識別部、632 色分類テーブル。
【0001】
【発明の属する技術分野】この発明は、画像処理技術を用いて車両の塗装色を判定する車色判別装置に関するものである。
【0002】
【従来の技術】図25は従来から駐車場や管理区域の入出庫管理等に用いられる車両識別装置の概念図である。図25において、1は進入路、2は進入してくる車両、3は進入路上に設置され、白黒カメラ4bを取り付けるための支柱である。また5は車両の到着を検出する車両検出部、17はカメラ4bからの画像信号から車両のナンバープレートに記載されているナンバーを判別するナンバー認識部である。
【0003】従来装置の構成の一例を図26に示し、動作の概要を以下に説明する。図26において、まず車両検出部5は光電スイッチ等によって構成され、車両がカメラ4bで撮影する領域を通過したことを検出し、車両検知を示すパルス信号である車両検知信号8をカメラインターフェース部611に出力する。カメラインターフェース部611はこの車両検知のパルス信号を受けてカメラ4bに対して撮影トリガ信号10を出力し、カメラ4bはこの撮影トリガ信号10をトリガとして、車両を撮影しビデオ信号7をカメラインターフェース部611に出力する。更にカメラインターフェース部611で受信されたビデオ信号7はA/D変換され画像メモリ612に記憶される。ナンバー認識部17では、この画像メモリ612に記憶された画像データを読み出し、画像データ中の黒画素と白画素の分布から所定の手順にしたがってナンバーの認識を行い、結果を認識結果出力部69から出力していた。このように、従来の車両識別装置は、ナンバープレートのナンバーを認識することによって車両の識別を行っていた。
【0004】
【発明が解決しようとする課題】従来の車両識別装置は、ナンバープレートのみによって車両を識別していたために、プレートの曲がりや汚れ等によってナンバーの一部文字が認識できないと、車両を確実に特定できないという問題点があった。
【0005】この発明に係る車色判別装置は、このような課題を解決するために、従来のナンバープレートの画像認識を用いた車両識別方法以外の車両識別方法を用いて車両を識別することができるものを得ることを目的とする。また、ナンバープレートの画像認識を用いた車両識別の特定精度を向上させることを目的とする。
【0006】
【課題を解決するための手段】第1の発明による車色判別装置は、路上に設置されカラー画像を取得するカメラと、前記カメラの視野内への車両の進入を検出する車両検出手段と、前記車両検出手段による前記車両の検出に応じて、前記カメラで取得された画像中の濃度分布に基づいて前記車両の特定部位に対応する画像の判別エリアを抽出する判別エリア設定手段と、前記判別エリア設定手段で抽出された判別エリア内の画像における色情報に基づいて前記車両の色を識別する色識別手段とを備えたものである。
【0007】また、第2の発明による車色判別装置は、第1の発明において、前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の平均輝度値を計算し、このRGBの各平均輝度値から白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合にRGBの平均輝度値に対応する色度図に基づいて色名を判定する色判定手段とを備えたものである。
【0008】第3の発明による車色判別装置は、第1の発明において、前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の平均輝度値を計算し、このRGBの各平均輝度値から白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合にRGBの各平均輝度値の相対比率を求め、それぞれの相対比率とあらかじめ設定された基準値との差の二乗平均値に基づいて色名を判定する色判定手段とを備えたものである。
【0009】第4の発明による車色判別装置は、第1の発明において、前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の各平均輝度値の相対比率を求め、それぞれの相対比率から明度を算出し、その算出された明度に基づいて白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合に前記各平均輝度値の相対比率から色相、彩度を算出し、あらかじめ基準色の色相、彩度を記憶した色分類表に基づいてこの算出された色相、彩度に対応する色名を判定する色判定手段とを備えたものである。
【0010】第5の発明による車色判別装置は、第4の発明において、前記色判定手段は、前記算出された彩度に基づいて灰色を区別する灰色判定部を備えたものである。
【0011】第6の発明による車色判別装置は、第1の発明において、前記車両検出手段は前記カメラで取得された画像からナンバープレートを抽出して車両の進入を検出する手段を備えたものである。
【0012】第7の発明による車色判別装置は、第1の発明において、前記判別エリア設定手段は前記車両の特定部位に対応する判別エリアを複数の小領域が結合された領域として抽出する手段を備え、前記色識別手段は前記判別エリア設定手段で抽出された複数の小領域毎にその色情報に基づいて対応する色名を識別し、この識別された色名毎に判別エリア内におけるその色を有する小領域の数を算出し、その算出結果を所定値と比較して複数色に塗り分けられた車両の色を判定する手段とを備えたものである。
【0013】第8の発明による車色判別装置は、第1の発明において、前記カメラのシャッタタイミングに同期して可視光を発光する照明部を備えたものである。
【0014】第9の発明による車色判別装置は、第1の発明において、前記色識別手段で識別された色情報と共に前記判別エリア設定手段で抽出された判別エリアの画像情報を伝送する画像伝送部と、この画像伝送部から伝送された情報を受信し、その受信された色情報と画像情報を表示する表示部とを備えたものである。
【0015】第10の発明による車色判別装置は、第1の発明において、前記色識別手段で識別された色情報と共に前記判別エリア設定手段で抽出された判別エリアの画像におけるRGB値を伝送する画像伝送部と、この画像伝送部から伝送された情報を受信し、その受信されたRBG値から元の色を再現した画像と色情報を表示する表示部とを備えたものである。
【0016】第11の発明による車色判別装置は、第1の発明において、前記カメラで取得された画像中から前記車両のナンバープレートを検出し、この検出されたナンバープレートのナンバーを読み取るナンバープレート認識手段と、このナンバープレート認識手段から出力される前記車両のナンバー情報および前記色識別部から得られる車色情報を予め登録した車両と照合し、合致した場合に一致信号を出力する照合装置とを備えたものである。
【0017】第12の発明による車色判別装置は、第1の発明において、前記カメラで取得された画像中から前記車両のナンバープレートを検出するナンバープレート検出手段と、前記ナンバープレート検出手段の検出に応じて前記車両までの距離を測定する測距手段と、前記測距手段で測定された前記車両までの距離の時間変化から前記車両の寸法または形状を測定し、この測定結果とあらかじめ設定された車両に対応した寸法または形状との比較により車種を判別する車種判別手段と、前記ナンバープレート検出手段で検出されたナンバープレートのナンバーを読み取るナンバープレート認識手段と、前記車種判別手段で判別された車種、前記ナンバープレート認識手段から出力される前記車両のナンバー情報および前記色識別部から得られる車色情報を予め登録した車両と照合し、合致した場合に一致信号を出力する照合装置を備えたものである。
【0018】第13の発明による車色判別装置は、第1の発明において、前記カメラで撮影された画像を逐次伝送する画像伝送手段と、前記画像伝送手段で伝送された画像を受信し、この受信した画像を前記判別エリア設定手段に出力する受信手段とを具備したものである。
【0019】
【発明の実施の形態】実施の形態1.図1および図2は、それぞれこの発明の実施の形態1を示す外観図および構成図であり、図1、図2において1〜3は図25に示す従来例と同様の機能を持つものであり、1は進入路、2は進入してくる車両、3は進入路上に設置された支柱であり、4は支柱3のアームに取付けられ通過する車両のカラー画像を撮像するためのカメラ、5はカメラ4の撮像位置に車両が到着したことを検出する車両検出部、6はカメラ4からのビデオ信号を入力し、車両の色を識別する車色識別装置である。車色識別装置6は更に、カメラ4から出力された画像を入力し記憶する画像入力部61、上記画像入力部61で記憶された塗色を判別するための領域(以下判別エリアと称する)を設定する判別エリア設定部62、上記判別エリア設定部62で設定された判別エリアの色を判定する車色判定部63、車色判定部63で判定された結果を出力する出力部64からなる。
【0020】実施の形態1に示す車色識別装置の動作の一例について以下に説明する。上記の装置において、カメラ4は常時進入路上の所定の位置の画像を撮像し、ビデオ信号7を出力する。車色識別装置6ではまず画像入力部61のカメラインターフェース部611でビデオ信号をA/D変換し、画像メモリ612に順次格納する。車両検出部5はカメラ4の撮像位置に車両が到着したことを検知し、処理をするためのトリガとして車両検知信号8を出力する。判別エリア設定部62の車両位置検出部621では、車両検出部5からの車両検知信号8を受信した時点で画像メモリ612に格納された画像を処理対象画像として画像メモリ612から選択して読み出す。なお、本実施例では、画像を連続的に入力し、後で車両検知信号8とANDをとって車両の特定を行っているが、車両検知信号8をトリガとして、カメラ4により撮影地点に達した車両の画像を1枚だけ撮像することも可能である。
【0021】次に判別エリアを設定する画像処理方法の例について示す。まず、車両位置検出部621では画像中から車両のみを抽出するために、参照画像メモリ622に格納されている例えば車両が無い場合の背景画像である参照画像と、処理対象画像として画像メモリ612から選択して読み出した画像について、画像間差分等の一般的な画像処理の手法を用い、移動物体として車両の概略位置を特定する(図3(a)、図3(b))。判別エリア設定部623では、車両の塗色を判別する部分として、ボンネット等の塗装面を対象として検出するために、入力画像の車両位置の縦方向の1ラインまたは複数ラインの濃度分布を求める(図3(c))。ボンネット等は一般的に濃度分布が一様なため、濃度変化率の少ない部分としてその位置を特定する。次に縦方向で検出されたボンネット等の位置に対して横方向に濃度分布をとり(図3(d))、同様の手法によってボンネット等位置の横方向を特定する。さらに判別エリア設定部623において、実際に塗装色を判別する判別エリアは、この特定したボンネット等の位置の内部で一定の面積が切り出される。なお、例えばカメラでの撮像範囲が2m程度であって車両が画面の中で大きな面積を占め、かつ車両検出部5からの車両検知信号8によって画面上での車両の撮影位置が安定する場合は、画面の殆どを車両が占め、処理上道路を含む背景の影響を殆ど受けないため、参照画像メモリ622を用いた車両位置検出部621における車両位置の検出処理は省略することができる。
【0022】車色判別部63の色識別部631では、まず上記判別エリア設定部62で設定された判別エリア内のR(赤)、G(緑)、B(青)の各成分の平均輝度値を求める。色分類テーブル632では予めR(赤)、G(緑)、B(青)の各輝度値と色名の対応表を設定しておき、色識別部631では求めた平均輝度値に対応する色の名前を色分類テーブル632を参照することによって選択し、出力部64を経由して結果を出力する。
【0023】このようにこの実施の形態によれば、ナンバープレートのナンバーとは全く異なる車両の特徴の1つである車両の色を識別することができる。従来ナンバープレートのナンバー認識によって行われていた車両の特定において、一部文字が認識できない場合には読めた文字のみから特定することになるので、対象範囲が広がり完全には特定できないが、このような場合でも車色の情報を併せて判定項目に盛り込むことによって対象範囲を絞り込むことが可能となり、特定の精度を向上させることができる。更に、駐車場や施設の管理設備のように予め登録しておいた車両との照合を行う場合、ナンバーと色の両方の情報を登録情報と比較することによって、ナンバーが一致していても色が合致しないと登録車両と認めない等の方法をとることができ、ナンバーを誤って認識した場合のチェックも行うことができ、信頼度が向上する。
【0024】実施の形態2.実施の形態2に係る発明においては、図2に示す色識別部631において、図4に示すようなアルゴリズムで判定を行う判定回路を有する。図4では色識別部631の処理内容のみを示しており、他の部分の構成と動作は図2と同様である。まず色識別部631の白黒判定手段において塗色判別エリア内のR(赤)、G(緑)、B(青)各成分の平均輝度を求める(S41)。次にR(赤)、G(緑)、B(青)各成分の和Tを計算する(S42)。Tは画像全体の明るさを示すので、まずTが白レベル判定値Wより大きい場合は白とし(S43)、Tが黒レベル判定値Bより小さい場合は黒と判定する(S44)。次に色識別部631の色判定手段において、R(赤)、G(緑)、B(青)、をxy変換する(S45)。xy変換はCIE(国際照明委員会、Commission Internationale d’Eclairage)にて規定されている方式を用い、X=0.49000R+0.31000G+O.20000BY=0.17697R+0.81240G+0.01063Bとする。更に色判定手段において、色分類テーブル632としては、図5に摸式的に示すようなCIEにて規定されている色度図と同様の形式の分類表を用い、上記で計算したxy値を図5上に当てはめて該当する部分の色名を選択する(S46)。ただし、屋外の車両撮影に関しては同じ色であっても環境条件によって見え方に差があり、細かい判別は困難であることから、色分類テーブル632としては、図5に示すように数色程度の分類とする。
【0025】実施の形態3.実施の形態3に係る発明においては、図2に示す色識別部631において図6に示すようなアルゴリズムで判定を行う回路を有する。色識別部631の白黒判定手段では、まず白と黒に関しては実施の形態2の図4(S41〜S44)に示した方法にて判定するが(図6のS61〜S64に相当)、黒白に該当しなかった場合は、判別エリア設定部62で設定された領域の画像のR(赤)、G(緑)、B(青)の各成分の相対比率r、g、bを求める(図6のS65)。一方、色分類テーブル632において、図7に示すように予め基準となる複数の色に対応するri 、gi 、bi 値を記憶しておく。色判定手段は、先に求めた入力画像の色成分の相対比率r、g、bと基準値との差の二乗平均RMSi を数1に基づいて計算し(図6のS66)、その値が最小となる色番号iに対応する色名を対象車両の塗色と判定する(図6のS67)。
【0026】
【数1】
【0027】実施の形態4.実施の形態4に係る発明においては、図2に示す色識別部631において図8に示すようなアルゴリズムで判定を行う回路を有する。まず色識別部631の白黒判定手段において塗色判別エリア内のR(赤)、G(緑)、B(青)各成分の平均輝度を求める(S81)。次にR(赤)、G(緑)、B(青)の各成分の相対比率r、g、bを求める(S82)。更に入力画像の相対比率r、g、bからHSV変換を用いて、色相(H)、彩度(S)、明度(V)を計算し(S83)、まず明度(V)によって白、黒を判定し(S84、S85)、次に色識別部631の色判定手段では、彩度(S)によって灰色を決定し(S86)、最後に色相(H)によって図9に示す様なマルセル色相環に基づいた変換表によって変換表によって色相Hに対応する色名を判定する(S87)。HSV変換については既にいくつかの式が公知であるが、例えば、Rainesの定義による下式を用いる。
【0028】
【数2】
【0029】なお、色相変換表は色分類テーブル632に記憶される。
【0030】実施の形態5.実施の形態5に係る発明において、図2に示す色識別部631に図10に示すようなアルゴリズムで判定を行う灰色判定部を有する。まず色識別部631の白黒判定手段において塗色判別エリア内のR(赤)、G(緑)、B(青)各成分の平均輝度を求める(S101)。次にR(赤)、G(緑)、B(青)の各成分の相対比率r、g、bを求める(S102)。更に入力画像の相対比率r、g、bからHSV変換を用いて、色相(H)、彩度(S)、明度(V)を計算し(S103)、明度(V)によって白、黒を判定する(S104、S105)。次に色識別部631の色判定手段では、色相(H)を計算し、図9に示すものと同様な形式の変換表によって色名を判定する。一般に、カメラ4の特性によって実際の被写体は灰色であってもカメラ出力が何れかの色に偏る場合があるため、色相での判定によって特定の色名に判定された場合にのみ彩度(S)によって灰色か否かを判定する。例えば、RGBの内B(青)が強いカメラでは灰色であってもRGBのバランスが崩れて青と判定されるため、一旦青色と判定した後(S107)、彩度(S)によって、青と灰の区別を行うものである(S108)。
【0031】実施の形態6.実施の形態6に係る発明の車両識別装置の構成図を図11に示す。図11においてナンバープレート検出部624は、カメラ4からカメラインターフェース部611を経由して連続的に入力される画像を画像メモリ612から順次読み出し、ナンバープレートを検出する。ナンバープレートの検出方法は従来から用いられている方法を用いるものとし、例えば画像メモリ612から読み出した画像の輝度信号を2値化することによって2値画像を得る。その2値画像の白画素と黒画素の分布と既知であるナンバープレートの文字配列の白画素と黒画素の分布とのマッチングをとることによってプレートの有無を判定する。この処理でプレート有と判断された場合は、その画像を処理対象画像として判別エリア設定部623に送出する。ナンバー周辺は車両のフロントグリルやバンパー等画像の輝度変化が大きい部分であるが、通常その上方には乗用車、トラックに関わらずフロントガラスまでの間に塗色の安定した領域が存在する。図12に示すように、判別エリア設定部623ではナンバープレート位置が既知となるためナンバープレートから上方に輝度変化を探索していく。塗色判別エリアの設定の方法は実施の形態1に示す方法と同様である。この動作によれば、プレート位置がわかっているため、比較的容易に塗色判別エリアを設定することができる。塗色判別エリアが設定された後は、実施の形態1と同様に、色識別部631では、まず上記判別エリア設定部62で設定された領域内のR(赤)、G(緑)、B(青)の各成分の平均輝度値を求める。色分類テーブル632では予めR(赤)、G(緑)、B(青)の各輝度値と色名の対応表を設定しておき、色識別部631では求めた平均輝度値を基に色分類テーブル632を参照して色の名前を選択し、出力部64を経由して結果を出力する。この実施の形態の車色別判別装置によれば、車両検出部が不要になり、コストの低減が図れると共にカメラ設置のみで済むため設置の自由度が増す。更に対象とする画面に確実に車両があることがわかるので、車両以外のものを判定する誤検出を回避することができる。
【0032】実施の形態7.実施の形態7に係る発明の構成を図13に示し、図14に処理の概要を図で示し、図15に多色判定用判別エリア設定部625における複数エリアの設定から色識別部631での色名判定までの処理の流れを示す。図13、図14において、まず車両位置検出部621では実施の形態1で示した方法によって車両の位置を特定する。次に多色判定用判別エリア設定部625では、図14(e)に示すようにボンネットと判定された領域内に所定数N個の小さな判別エリアを設定する(図15のS151)。ただしボンネットを特定する場合、2色以上の塗装色で塗装されている車両ではボンネット全面は一様な輝度分布とはならないため、予め設定した以上の長さに亙って輝度変動の無い部分をボンネットと定義する。次に色識別部631では、各判別エリアの全てに対して実施の形態1に示す方法と同様の方法によって、色分類テーブル632を参照して図14(f)のように個別に色判定を行う(図15のS152〜S153)。全エリアの色判定の結果、ある色番号iと判定された判別エリアの個数niの全体に占める割合ni/Nが設定値より小さい場合は飾り等の塗色に関係しない部分として除外し、図14(g)のようにni/Nが設定値以上のもののみ有効とする(図15のS154〜S158)。この処理の結果、有効となった色番号に対応する色名だけを出力部64から出力する(図15のS159)。これによってツートンカラー等複数の色で塗り分けられた車両の色を識別でき、また一部に模様や文字が表示されている場合も全体の色を捉えることができる。
【0033】実施の形態8.実施の形態8に係る発明の車色判別装置の外観図を図16に示す。図16において、1〜6は図1に示すものと同様である。9はカメラ4のシャッタと同期した照明装置である。本車色判別装置は、車両の塗色を判別することを目的としているため、照明にはキセノン等の太陽光のスペクトルに近い光源を用いる。25は周囲の明るさを電気信号に変換する光電センサであり、光量信号26を出力する。信号の流れを図17に示す。図17において、3〜8は図2に示すものと同様である。カメラインターフェース部611からは、車両検出部5からの車両検知信号8を受けると、カメラ4に対して外部同期のシャッタ指令10を出力する。この際、光量信号26が予め設定した値以下であった場合に光量不足と判断し、シャッタ指令10と同時に照明装置9対して発光指令11を出力し、カメラ4からのビデオ信号7を入力し画像メモリ612に記憶する。ビデオ信号7は、照明発光時の画像であって、地下駐車場や屋外の夜間など元々可視光の少ないところであっても十分な輝度を持つ画像を得ることができる。判別エリア設定部623、色識別部631、色分類テーブル632は実施の形態1に示すものと同じ機能を有するものであって、実施の形態1と同じ動作を行い色の判別を行い、出力部64から出力される。また、この実施の形態では照明9から可視の光を照射するが、この際ドライバーに幻惑等の影響を与えないような位置に照明9を設置する。すなわち、対象車両が撮影位置に来た場合に、照射した光が直接ドライバーの目に達しないように、照明9の設置位置はセンサが車両を感知する位置あるいはその後方の真上付近または路側とする。又後方から照射する場合は、カメラ4に対してハレーションを引き起こさないよう、正反射生じない位置とする。更に、照明9はその前面に拡散板を取り付けるなどして、照度むらが出ないようにする。これによって夜または屋内の暗部であっても車色の識別を行うことができる。
【0034】実施の形態9.実施の形態9に係る発明の車色判別装置の構成図を図18に示す。図18において3〜8までは図2と同様である。12は判別に用いたエリアの画像データを圧縮する画像圧縮部、13は画像圧縮部12で圧縮された画像とその画像の取得時間を伝送するまで一時記憶する伝送メモリであり、複数枚の画像メモリから構成される。更に65は取得時間に基づいて対応付けられた色判定の結果とその時の画像を合わせて自営線などを通じて伝送する画像伝送部である。また14は別の地点に設置され、画像伝送部65から伝送された画像と自動判定した結果の色名をディスプレイ等に表示し、ディスプレイを通して操作員が色名とその画像を比較できる表示装置である。実施の形態9に係る車色判別装置はこのように構成され、カメラ4から画像メモリに入力した画像を画像圧縮部12ですぐに圧縮し、容量を小さくして一時記憶し、画像の番号を管理することにより、小さなメモリ容量で塗色の自動判別終了後その結果を入力画像と合わせて送信することができる。これによって、遠隔地で操作員が目視で自動判別の結果の正否を確認することが可能となり、また自動判別結果の修正も可能となる。
【0035】実施の形態10.実施の形態10に係る発明の車色判別装置の構成図を図19に示す。図19において、15は色識別部631で用いた判別エリア内のR(赤)、G(緑)、B(青)情報を一時記憶するRGB記憶部、66はRGB記憶部15で一時記憶された判別エリアのRGB値とその値を用いて色識別部631で自動判別した色名とを共に伝送するRGB伝送部である。また、16は別の地点に設置され、RGB伝送部66から伝送されたRGB情報から元の色を再現して表示し、自動判定した結果を比較できる画像再生装置である。実施の形態10に係る車色判別装置はこのように構成され、塗色判別に用いた画像情報をRGB値に圧縮して保存、伝送することにより、実施の形態9と比較して少ないメモリと回線容量によって、遠隔地で操作員が目視で自動判別の結果の正否を確認し、また自動判別結果の修正もできるシステムの構築が可能となる。
【0036】実施の形態11.実施の形態11に係る発明の車両識別装置の外観図を図20に構成図を図21に示す。図21において、実施の形態6で示したものと同様に、ナンバープレート検出部624は、カメラ4からカメラインターフェース部611を経由して連続的に入力される画像を画像メモリ612から順次読み出し、従来の車番読み取り装置で用いられているパタンマッチングの手法を用いてナンバープレートを検出する。この処理でプレート有と判断された場合は、その画像を処理対象画像として判別エリア設定部623に送出する。一方検出されたナンバープレート部分の画像はナンバープレート認識部17に伝送され、このプレート画像の各文字と予め登録してある基準となる文字パタンとをパタンマッチングする等の従来の車番読み取り装置で用いられている手法を用いてナンバープレートに表示されるナンバーが認識される。車色の識別結果とナンバーの認識結果は合わせて塗色、ナンバ伝送部67から出力される。ナンバー伝送部67から出力された車色の識別結果とナンバーの認識結果は、それぞれ図示しない照合装置において、予め登録された車両の有する車色・ナンバーと照合され、合致した場合に一致信号が出力される。この実施の形態の車色判別装置では、ナンバー情報と車両の塗色情報がわかるため、車両の特定精度が向上する。
【0037】実施の形態12.実施の形態12に係る発明の車色判別装置の外観図を図22に、構成図を図23に示す。図22、図23において1〜63は、図2と同様であり、図22において、実施の形態6で示したものと同様に、ナンバープレート検出部624は、カメラ4からカメラインターフェース部611を経由して連続的に入力される画像を画像メモリ612から順次読み出し、従来の車番読み取り装置で用いられているパタンマッチングの手法を用いてナンバープレートを検出する。この処理でプレート有と判断された場合は、その画像を処理対象画像として判別エリア設定部623に送出する。一方検出されたナンバープレート部分の画像はナンバープレート認識部17に伝送され、このプレート画像の各文字と予め登録してある基準となる文字パタンとをパタンマッチングする等の従来の車番読み取り装置で用いられている手法を用いて認識される。更に18は進入路1の上部に設けられた、前記ナンバープレート検出部624でのナンバープレートの検出に応じて投光する投光器、19は反射光の位置から車両の進行に応じて車体の高さの時間変化を測定し、進入路1の進行方向における車両の断面形状や寸法を計測する測距部、20は車両の断面形状から車両のセダン、ワンボックス等の種別を判別する車種判別装置、68は車色、ナンバー、車種の結果を合わせて送信する伝送路である。この実施の形態に係る車色判別装置では、実施の形態11に示したナンバー情報と車両の塗色情報に加えて車種判別装置20により車両の寸法や断面形状がわかるため、照合装置において更に車両の特定精度が向上する。なお、この測距部19における測距は、車両の進行方向に垂直な方向の車両までの距離を測定するものであれば、例えば水平に測距しても良く、この場合は車長を測定できる。
【0038】実施の形態13.実施の形態13に係る発明の車色判別装置の構成図を図24に示す。図24において4は車両を撮像するカメラ、5は車両の到着を検出する車両検出部、21は車両検出時の画像のみを圧縮するデータ圧縮部、22は圧縮された画像を伝送する伝送部である。また中央装置23は遠隔地に設置され、複数の伝送部22からのデータを受信、処理するものであって、24は伝送部22からの画像データを受信する画像入力部である。更に、車色識別を行う判別エリア設定部62と車色判定部63は図2に示すものと同様の機能を有するものであり、判別エリア設定部62では、画像中に車両が存在していることがわかっているので、実施の形態1と同様の方法で該当する画像から車両の塗色を判別する判別エリアを設定する。色識別部631では、上記判別エリア設定部で設定された領域の画像のRGBの比率および大きさから予め設定された色分類テーブル632を参照して色の名前を判定し、出力部64を経由して結果を出力する。実施の形態13に係る発明の車色判別装置によれば、各カメラ対応に車色識別機能を持つ必要が無く、中央で一括して持つことができ、大幅なコストダウンができる。また、中央装置において比較的大容量のメモリを持たせることにより、オフラインで塗色判別を行ったり、指定したカメラの塗色判別のみを行うことが可能となるので、自由度の高い運用が可能となる。
【0039】なお、この実施の形態1から13に係る発明は、駐車場や特定施設の入出庫管理以外にも、車両の識別を行うシステムであれば、他のものにも適用できる。
【0040】
【発明の効果】第1の発明によれば、カラー画像による車両の塗色の情報を得ることができる。これによって、従来から行われているナンバープレートの文字情報とは異なる車両の識別情報を得ることができる。
【0041】第2の発明によれば、既存の色度図に沿った色情報を得ることができる。
【0042】第3の発明によれば、基準色との差で色を特定するので、複雑な変換無しに予め設定した色分類に対応した判定結果を得ることができる。
【0043】第4の発明によれば、マンセル色相環に沿った色情報を得ることができる。
【0044】第5の発明によれば、彩度を求めることによって、カメラの色ずれのために灰色がある特定の色に近づく場合に、灰色を識別することができる。
【0045】第6の発明によれば、画像中から直接車両を検出し、塗色判別エリアを設定するので、カメラ以外の車両検出手段が不要となり、コストダウンと設置自由度の向上につながる。
【0046】第7の発明によれば、判別エリア内に小領域を複数設定することにより、複数の色で塗分けられた車両の識別が可能となる。
【0047】第8の発明によれば、シャッタと同期した照明を備えているので、夜間や地下の暗い場所でも使用することができる。
【0048】第9の発明によれば、判定した色名情報と合わせて対象画像を伝送するので、他の地点で色名の正誤を確認、修正することができる。
【0049】第10の発明によれば、判定した色名情報と合わせてRGB情報を伝送するので、他の地点で実際の色を合成して色名の正誤を確認、修正することができる。
【0050】第11の発明によれば、車色識別装置とナンバープレート認識手段を併せ持つために、ナンバー読み取りで一部文字が認識できない場合でも塗色情報を参照することによって、車両の特定精度が向上する。
【0051】第12の発明によれば、車色識別装置とナンバー読み取り装置と車種識別装置を併せ持つために、所定数のナンバー(7ナンバー)読み取りで一部文字が認識できない場合でも塗色情報や車種(車両の形状)を参照することによって、車両の特定精度が向上する。
【0052】第13の発明によれば、画像を伝送することによって別の地点で車色の識別ができるため、道路側に全て車色識別機能を持たせる必要が無くコストダウンが図れ、またナンバー情報が不備なものなど必要に応じて特定の車両について処理を行うことができる。
【図面の簡単な説明】
【図1】 この発明による車色判別装置の実施の形態1の外観を示す概念図である。
【図2】 この発明による車色判別装置の実施の形態1の構成を示す図である。
【図3】 この発明による車色判別装置の実施の形態1の動作を示す図である。
【図4】 この発明による車色判別装置の実施の形態2の動作を説明する図である。
【図5】 この発明による車色判別装置の実施の形態2に示す色度図の概要を説明する図である。
【図6】 この発明による車色判別装置の実施の形態3の動作を説明する図である。
【図7】 この発明による車色判別装置の実施の形態3の色分類テーブルの例を説明する図である。
【図8】 この発明による車色判別装置の実施の形態4の動作を説明する図である。
【図9】 この発明による車色判別装置の実施の形態4の色分類テーブルの例を説明する図である。
【図10】 この発明による車色判別装置の実施の形態5の動作を説明する図である。
【図11】 この発明による車色判別装置の実施の形態6の構成を示す図である。
【図12】 この発明による車色判別装置の実施の形態6の動作を説明する図である。
【図13】 この発明による車色判別装置の実施の形態7の構成を示す図である。
【図14】 この発明による車色判別装置の実施の形態7の動作を説明する図である。
【図15】 この発明による車色判別装置の実施の形態7の動作を説明する図である。
【図16】 この発明による車色判別装置の実施の形態8の外観を示す概念図である。
【図17】 この発明による車色判別装置の実施の形態8の構成を示す図である。
【図18】 この発明による車色判別装置の実施の形態9の構成を示す図である。
【図19】 この発明による車色判別装置の実施の形態10の構成を示す図である。
【図20】 この発明による車色判別装置の実施の形態11の外観を示す概念図である。
【図21】 この発明による車色判別装置の実施の形態11の構成を示す図である。
【図22】 この発明による車色判別装置の実施の形態12の外観を示す概念図である。
【図23】 この発明による車色判別装置の実施の形態12の構成を示す図である。
【図24】 この発明による車色判別装置の実施の形態13の構成を示す概念図である。
【図25】 従来の車色判別装置の外観を示す概念図である。
【図26】 従来の車色判別装置の構成を示す図である。
【符号の説明】
1 進入路、2 対象車両、3 支柱、4 カメラ、4b 白黒カメラ、5車両検出部、6 車色判別装置、7 ビデオ信号、8 車両検知信号、9 照明、10 撮影トリガ信号、11 発光指令、12 画像圧縮部、13 伝送メモリ、14 表示装置、15 RGB記憶部、16 画像再生装置、17 ナンバープレート認識部、18 投光器、19 測距部、20 車種判別装置、21データ圧縮部、22 伝送部、23 中央装置、24 画像入力部、25 光電センサ、26 光量信号、61 画像入力部、62 判別エリア設定部、63車色判定部、64 出力部、65 画像伝送部、66 RGB伝送部、67 塗色ナンバー伝送部、68 塗色ナンバー車種伝送部、68 認識結果出力部、611 カメラインターフェース部、612 画像メモリ、621 車両位置検出部、622 参照画像メモリ、623 判別エリア設定部、624 ナンバープレート検出部、625 多色判定用判別エリア設定部、631 色識別部、632 色分類テーブル。
【特許請求の範囲】
【請求項1】 路上に設置されカラー画像を取得するカメラと、前記カメラの視野内への車両の進入を検出する車両検出手段と、前記車両検出手段による前記車両の検出に応じて、前記カメラで取得された画像中の濃度分布に基づいて前記車両の特定部位に対応する画像の判別エリアを抽出する判別エリア設定手段と、前記判別エリア設定手段で抽出された判別エリア内の画像における色情報に基づいて前記車両の色を識別する色識別手段とを備えた車色判別装置。
【請求項2】 前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の平均輝度値を計算し、このRGBの各平均輝度値から白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合にRGBの平均輝度値に対応する色度図に基づいて色名を判定する色判定手段とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項3】 前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の平均輝度値を計算し、このRGBの各平均輝度値から白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合にRGBの各平均輝度値の相対比率を求め、それぞれの相対比率とあらかじめ設定された基準値との差の二乗平均値に基づいて色名を判定する色判定手段とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項4】 前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の各平均輝度値の相対比率を求め、それぞれの相対比率から明度を算出し、その算出された明度に基づいて白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合に前記各平均輝度値の相対比率から色相、彩度を算出し、あらかじめ基準色の色相、彩度を記憶した色分類表に基づいてこの算出された色相、彩度に対応する色名を判定する色判定手段とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項5】 前記色判定手段は、前記算出された彩度に基づいて灰色を区別する灰色判定部を備えたことを特徴とする請求項4記載の車色判別装置。
【請求項6】 前記車両検出手段は、前記カメラで取得された画像からナンバープレートを抽出して車両の進入を検出する手段を備えたことを特徴とする請求項1記載の車色判別装置。
【請求項7】 前記判別エリア設定手段は前記車両の特定部位に対応する判別エリアを複数の小領域が結合された領域として抽出する手段を備え、前記色識別手段は前記判別エリア設定手段で抽出された複数の小領域毎にその色情報に基づいて対応する塗色名を識別し、この識別された色名毎に判別エリア内におけるその色を有する小領域の数を算出し、その算出結果を所定値と比較して複数色に塗り分けられた車両の色を判定する手段とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項8】 前記カメラのシャッタタイミングに同期して可視光を発光する照明部を備えたことを特徴とする請求項1記載の車色判別装置。
【請求項9】 前記色識別手段で識別された色情報と共に前記判別エリア設定手段で抽出された判別エリアの画像情報を伝送する画像伝送部と、この画像伝送部から伝送された情報を受信し、その受信された色情報と画像情報を表示する表示部とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項10】 前記色識別手段で識別された色情報と共に前記判別エリア設定手段で抽出された判別エリアの画像におけるRGB値を伝送する画像伝送部と、この画像伝送部から伝送された情報を受信し、その受信されたRBG値から元の色を再現した画像と色情報を表示する表示部とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項11】 前記カメラで取得された画像中から前記車両のナンバープレートを検出し、この検出されたナンバープレートのナンバーを読み取るナンバープレート認識手段と、このナンバープレート認識手段から出力される前記車両のナンバー情報および前記色識別部から得られる車色情報を予め登録した車両と照合し、合致した場合に一致信号を出力する照合装置とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項12】 前記カメラで取得された画像中から前記車両のナンバープレートを検出するナンバープレート検出手段と、前記ナンバープレート検出手段の検出に応じて前記車両までの距離を測定する測距手段と、前記測距手段で測定された前記車両までの距離の時間変化から前記車両の寸法または形状を測定し、この測定結果とあらかじめ設定された車両に対応した寸法または形状との比較により車種を判別する車種判別手段と、前記ナンバープレート検出手段で検出されたナンバープレートのナンバーを読み取るナンバープレート認識手段と、前記車種判別手段で判別された車種、前記ナンバープレート認識手段から出力される前記車両のナンバー情報および前記色識別部から得られる車色情報を予め登録した車両と照合し、合致した場合に一致信号を出力する照合装置を備えたことを特徴とする請求項1記載の車色判別装置。
【請求項13】 前記カメラで撮影された画像を逐次伝送する画像伝送手段と、前記画像伝送手段で伝送された画像を受信し、この受信した画像を前記判別エリア設定手段に出力する受信手段とを具備したことを特徴とする請求項1記載の車色判別装置。
【請求項1】 路上に設置されカラー画像を取得するカメラと、前記カメラの視野内への車両の進入を検出する車両検出手段と、前記車両検出手段による前記車両の検出に応じて、前記カメラで取得された画像中の濃度分布に基づいて前記車両の特定部位に対応する画像の判別エリアを抽出する判別エリア設定手段と、前記判別エリア設定手段で抽出された判別エリア内の画像における色情報に基づいて前記車両の色を識別する色識別手段とを備えた車色判別装置。
【請求項2】 前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の平均輝度値を計算し、このRGBの各平均輝度値から白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合にRGBの平均輝度値に対応する色度図に基づいて色名を判定する色判定手段とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項3】 前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の平均輝度値を計算し、このRGBの各平均輝度値から白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合にRGBの各平均輝度値の相対比率を求め、それぞれの相対比率とあらかじめ設定された基準値との差の二乗平均値に基づいて色名を判定する色判定手段とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項4】 前記色識別手段は、前記判別エリア内におけるカラー画像のR(赤)、G(緑)、B(青)各成分の各平均輝度値の相対比率を求め、それぞれの相対比率から明度を算出し、その算出された明度に基づいて白色、黒色、有彩色のいずれかの識別を行う白黒判定手段と、前記白黒判定手段で有彩色と識別された場合に前記各平均輝度値の相対比率から色相、彩度を算出し、あらかじめ基準色の色相、彩度を記憶した色分類表に基づいてこの算出された色相、彩度に対応する色名を判定する色判定手段とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項5】 前記色判定手段は、前記算出された彩度に基づいて灰色を区別する灰色判定部を備えたことを特徴とする請求項4記載の車色判別装置。
【請求項6】 前記車両検出手段は、前記カメラで取得された画像からナンバープレートを抽出して車両の進入を検出する手段を備えたことを特徴とする請求項1記載の車色判別装置。
【請求項7】 前記判別エリア設定手段は前記車両の特定部位に対応する判別エリアを複数の小領域が結合された領域として抽出する手段を備え、前記色識別手段は前記判別エリア設定手段で抽出された複数の小領域毎にその色情報に基づいて対応する塗色名を識別し、この識別された色名毎に判別エリア内におけるその色を有する小領域の数を算出し、その算出結果を所定値と比較して複数色に塗り分けられた車両の色を判定する手段とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項8】 前記カメラのシャッタタイミングに同期して可視光を発光する照明部を備えたことを特徴とする請求項1記載の車色判別装置。
【請求項9】 前記色識別手段で識別された色情報と共に前記判別エリア設定手段で抽出された判別エリアの画像情報を伝送する画像伝送部と、この画像伝送部から伝送された情報を受信し、その受信された色情報と画像情報を表示する表示部とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項10】 前記色識別手段で識別された色情報と共に前記判別エリア設定手段で抽出された判別エリアの画像におけるRGB値を伝送する画像伝送部と、この画像伝送部から伝送された情報を受信し、その受信されたRBG値から元の色を再現した画像と色情報を表示する表示部とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項11】 前記カメラで取得された画像中から前記車両のナンバープレートを検出し、この検出されたナンバープレートのナンバーを読み取るナンバープレート認識手段と、このナンバープレート認識手段から出力される前記車両のナンバー情報および前記色識別部から得られる車色情報を予め登録した車両と照合し、合致した場合に一致信号を出力する照合装置とを備えたことを特徴とする請求項1記載の車色判別装置。
【請求項12】 前記カメラで取得された画像中から前記車両のナンバープレートを検出するナンバープレート検出手段と、前記ナンバープレート検出手段の検出に応じて前記車両までの距離を測定する測距手段と、前記測距手段で測定された前記車両までの距離の時間変化から前記車両の寸法または形状を測定し、この測定結果とあらかじめ設定された車両に対応した寸法または形状との比較により車種を判別する車種判別手段と、前記ナンバープレート検出手段で検出されたナンバープレートのナンバーを読み取るナンバープレート認識手段と、前記車種判別手段で判別された車種、前記ナンバープレート認識手段から出力される前記車両のナンバー情報および前記色識別部から得られる車色情報を予め登録した車両と照合し、合致した場合に一致信号を出力する照合装置を備えたことを特徴とする請求項1記載の車色判別装置。
【請求項13】 前記カメラで撮影された画像を逐次伝送する画像伝送手段と、前記画像伝送手段で伝送された画像を受信し、この受信した画像を前記判別エリア設定手段に出力する受信手段とを具備したことを特徴とする請求項1記載の車色判別装置。
【図1】

【図5】
【図2】
【図3】
【図4】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】
【図13】
【図15】
【図16】
【図14】
【図17】
【図20】
【図21】
【図18】
【図19】
【図22】
【図25】
【図23】
【図24】
【図26】
【図5】
【図2】
【図3】
【図4】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図15】
【図16】
【図14】
【図17】
【図20】
【図21】
【図18】
【図19】
【図22】
【図25】
【図23】
【図24】
【図26】
【公開番号】特開2000−222673(P2000−222673A)
【公開日】平成12年8月11日(2000.8.11)
【国際特許分類】
【出願番号】特願平11−21784
【出願日】平成11年1月29日(1999.1.29)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成12年8月11日(2000.8.11)
【国際特許分類】
【出願日】平成11年1月29日(1999.1.29)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]