
車色判定装置、コンピュータプログラム及び車色判定方法
【課題】高度な画像処理を行うことなく車両の色を判定することができる車色判定装置、コンピュータプログラム及び車色判定方法を提供する。
【解決手段】プレート認識部14は、撮像画像上で検出された車両画像に基づいて、ナンバープレートを認識する。プレート位置算出部15は、プレート位置を算出する。分類番号検出部16は、プレート認識部14から出力されたプレート画像に基づいて、ナンバープレート上の分類番号を検出する。車色判定領域特定部17は、プレート位置算出部15で算出したプレート位置、及び分類番号検出部16で検出した分類番号に基づいて、車色判定領域の形状及びプレートに対する位置を特定する。車色判定部18は、車色判定領域特定部17で特定された車色判定領域の画素値に基づいて車両の色を判定する。
【解決手段】プレート認識部14は、撮像画像上で検出された車両画像に基づいて、ナンバープレートを認識する。プレート位置算出部15は、プレート位置を算出する。分類番号検出部16は、プレート認識部14から出力されたプレート画像に基づいて、ナンバープレート上の分類番号を検出する。車色判定領域特定部17は、プレート位置算出部15で算出したプレート位置、及び分類番号検出部16で検出した分類番号に基づいて、車色判定領域の形状及びプレートに対する位置を特定する。車色判定部18は、車色判定領域特定部17で特定された車色判定領域の画素値に基づいて車両の色を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定する車色判定装置、該車色判定装置を実現するためのコンピュータプログラム及び車色判定方法に関する。
【背景技術】
【0002】
近年、交通監視などの分野において、特定の車両を抽出する技術の1つとして車両の色(車色)を判定する技術が開発されている。例えば、カメラで取得したカラー画像上の車両の特徴的な部分(例えば、ナンバープレート、サイドミラー、フロントミラー、ヘッドランプ等)を検出し、検出した部分を基にして車両の特定の部位(例えば、ボンネット領域、ルーフ領域、車両側面とドア領域、トランク領域等)を検出することにより、環境条件によらず車両の色を判別すべき部位を正確に抽出することができる特定部位抽出プログラムが開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−164193号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術は、例えば、車両の色を判別すべき部位としてボンネット領域を抽出する場合、ヘッドランプ及びサイドミラーそれぞれの位置情報を基にして、2つのヘッドランプの位置と2つのサイドミラーの位置を四角形の頂点とみなし、その四角形の対角線の交点を検出する。そして、検出した交点から円状に属性情報(例えば、測光量や色属性)の変化のない領域を抽出することにより、ボンネット領域を特定しなければならない。このため、車両の色を判別する際の不要な領域を除外するために高度な画像処理が必要となり、簡単な画像処理で車両の色を判定する技術が望まれていた。
【0005】
本発明は、斯かる事情に鑑みてなされたものであり、高度な画像処理を行うことなく車両の色を判定することができる車色判定装置、該車色判定装置を実現するためのコンピュータプログラム及び車色判定方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
第1発明に係る車色判定装置は、撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定する車色判定装置において、撮像画像に基づいて車両の番号標識上の分類番号を検出する分類番号検出手段と、該分類番号検出手段で検出した分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定する車色判定領域特定手段と、該車色判定領域特定手段で特定した車色判定領域の各画素の色成分に基づいて車両の色を判定する車色判定手段とを備えることを特徴とする。
【0007】
第2発明に係る車色判定装置は、第1発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある矩形状の領域であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定するように構成してあることを特徴とする。
【0008】
第3発明に係る車色判定装置は、第2発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種用途の小型自動車である場合、縦長の矩形状の領域を車色判定領域として特定するように構成してあることを特徴とする。
【0009】
第4発明に係る車色判定装置は、第2発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が貨物の運送用の小型自動車である場合、横長の矩形状の領域を車色判定領域として特定するように構成してあることを特徴とする。
【0010】
第5発明に係る車色判定装置は、第2発明乃至第4発明のいずれか1つにおいて、前記所定の角度は、前記撮像画像上の横軸と道路の延伸方向とのなす角度であることを特徴とする。
【0011】
第6発明に係る車色判定装置は、第2発明乃至第5発明のいずれか1つにおいて、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合、前記撮像画像上で前記番号標識から道路の延伸方向に沿った位置に車色判定領域を特定するように構成してあることを特徴とする。
【0012】
第7発明に係る車色判定装置は、第1発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が貨物の運送用の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある略矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなし、該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定するように構成してあることを特徴とする。
【0013】
第8発明に係る車色判定装置は、第1発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が所定の乗車定員以上の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある略矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなし、該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定するように構成してあることを特徴とする。
【0014】
第9発明に係る車色判定装置は、第1発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が特種用途の普通自動車又は大型特殊自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置を間にして適長離隔した2つの矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定するように構成してあることを特徴とする。
【0015】
第10発明に係る車色判定装置は、第7発明乃至第9発明のいずれか1つにおいて、前記所定の角度は、前記撮像画像上の横軸方向に対して80°から100°であることを特徴とする。
【0016】
第11発明に係る車色判定装置は、第7発明乃至第10発明のいずれか1つにおいて、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が貨物の運送用の普通自動車、所定の乗車定員以上の普通自動車、特種用途の普通自動車又は大型特殊自動車に対応する場合、前記番号標識から前記撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定するように構成してあることを特徴とする。
【0017】
第12発明に係る車色判定装置は、第2発明乃至第11発明のいずれか1つにおいて、車両の番号標識の大きさを判定する番号標識判定手段と、該番号標識判定手段で判定した番号標識の大きさ及び前記分類番号検出手段で検出した分類番号に基づいて、特種用途の普通自動車又は特種用途の小型自動車のいずれかを判定する特種用途自動車判定手段とを備えることを特徴とする。
【0018】
第13発明に係るコンピュータプログラムは、コンピュータに、撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定するステップを実行させるためのコンピュータプログラムにおいて、コンピュータに、撮像画像に基づいて車両の番号標識上の分類番号を検出するステップと、検出した分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定するステップと、特定した車色判定領域の各画素の色成分に基づいて車両の色を判定するステップとを実行させることを特徴とする。
【0019】
第14発明に係る車色判定方法は、撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定する車色判定装置による車色判定方法において、撮像画像に基づいて車両の番号標識上の分類番号を検出するステップと、検出された分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定するステップと、特定された車色判定領域の各画素の色成分に基づいて車両の色を判定するステップとを含むことを特徴とする。
【0020】
第1発明、第13発明及び第14発明にあっては、撮像画像に基づいて車両の番号標識(ナンバープレート)上の分類番号を検出する。分類番号は、ナンバープレートの地名の右側に表示され、自動車の大きさ(例えば、小型、普通又は大型など)及び用途(例えば、乗用、貨物、特種用途又は大型特殊など)を分類する1〜3桁の数字である。また、番号標識は、例えば、車両が存在しない場合の画像と車両が存在する場合の画像との差に基づいて車両を検出し、検出した車両の画像に基づいて、矩形状の番号標識の切り出し処理を行うことにより検出することができる。また、分類番号の検出は、一般的な文字認識処理により行うことができる。
【0021】
検出した分類番号に基づいて、撮像画像上の車色判定領域の形状及び番号標識に対する位置を特定する。なお、予め分類番号毎に、撮像画像上の車色判定領域の形状、番号標識に対する位置(例えば、距離、方向など)を定めておき、検出した分類番号に対応する車色判定領域を選択することができる。そして、特定した車色判定領域の各画素の色成分に基づいて車両の色を判定する。例えば、車色判定領域の各画素の色成分をRGBからHSI(H:色相、S:彩度、I:輝度)に変換し、色相H及び/又は輝度Iに基づいて車両の色を判定することができる。
【0022】
検出した分類番号に基づいて車色判定領域の位置及び形状を特定するので、従来のように、車両の色を判定する判定領域を属性情報に基づいて判別するための高度な画像処理を行うことなく車両の色を判定することができる。また、車両の大きさ及び用途に応じて分類された分類番号に基づいて車色判定領域を特定するので、様々な種別の車両に応じた車色判定領域を特定することができ、車色判別に不要な部分が含まれることなく精度よく車色を判定することができる。
【0023】
第2発明にあっては、検出した分類番号が小型自動車又は所定の乗車定員(例えば、10人)以下の普通自動車に対応する場合、撮像画像上で番号標識(ナンバープレート)の上方位置にある矩形状の領域であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。撮像画像上の矩形状の領域は、例えば、平行四辺形である。小型自動車又は所定の乗車定員以下の普通自動車の場合、ナンバープレートの上方に矩形状(正方形又は長方形)のボンネット領域が存在するので、検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある矩形状の領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が撮像画像上で縦方向から撮像部の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0024】
第3発明にあっては、検出した分類番号が人の運送用の小型自動車、所定の乗車定員(例えば、10人)以下の普通自動車又は特種の用途の小型自動車である場合、縦長の矩形状の領域を車色判定領域として特定する。人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種の用途の小型自動車の場合、ナンバープレートの上方に縦長の矩形状(縦長の長方形)のボンネット領域が存在するので、検出した分類番号が人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種の用途の小型自動車である場合には、番号標識(ナンバープレート)の上方位置にある縦長の矩形状の領域を車色判定領域として特定する。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0025】
第4発明にあっては、検出した分類番号が貨物の運送用の小型自動車である場合、横長の矩形状の領域を車色判定領域として特定する。貨物の運送用の小型自動車の場合、ナンバープレートの上方に横長の矩形状(横長の長方形)のボンネット領域が存在するので、検出した分類番号が貨物の運送用の小型自動である場合には、番号標識(ナンバープレート)の上方位置にある横長の矩形状の領域を車色判定領域として特定する。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0026】
第5発明にあっては、所定の角度は、撮像画像上の横軸と道路の延伸方向とのなす角度である。撮像部の設置条件に応じて、車両を斜め前から撮像した場合には、撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、車色判例領域の縦方向の辺を横軸に対して道路の延伸方向だけ傾けることにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0027】
第6発明にあっては、検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合、撮像画像上で番号標識から道路の延伸方向に沿った位置に車色判定領域を特定する。撮像部の設置条件に応じて、車両を斜め前から撮像した場合には、撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、番号標識から道路の延伸方向に沿った位置に車色判例領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0028】
第7発明にあっては、検出した分類番号が貨物の運送用の普通自動車に対応する場合、撮像画像上で番号標識の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定する。貨物の運送用の普通自動車の場合、ナンバープレートの上方に矩形状のフロントグリルがあり、フロントグリルの両横及び上側にボンネット領域が存在するので、検出した分類番号が貨物の運送用の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が撮像画像上で縦方向から撮像部の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0029】
第8発明にあっては、検出した分類番号が所定の乗車定員(例えば、11人)以上の普通自動車に対応する場合、撮像画像上で番号標識の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定する。所定の乗車定員以上の普通自動車の場合、ナンバープレートの上方に矩形状のボンネット領域があり、さらにその領域に連続して、2つのヘッドライトの上方に高さ寸法が短い矩形状のボンネット領域が存在するので、検出した分類番号が所定の乗車定員以上の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が撮像画像上で縦方向から撮像部の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0030】
第9発明にあっては、検出した分類番号が特種用途の普通自動車又は大型特殊自動車に対応する場合、撮像画像上で番号標識の上方位置を間にして適長離隔した2つの矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。特種用途の普通自動車又は大型特殊自動車の場合、車両の前面の両側に離隔して矩形状のボンネット領域が存在するので、検出した分類番号が特種用途の普通自動車又は大型特殊自動車に対応する場合には、番号標識(ナンバープレート)の上方位置を間にして適長離隔した2つの矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が撮像画像上で縦方向から撮像部の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0031】
第10発明にあっては、所定の角度は、撮像画像上の横軸方向に対して80°から100°である。貨物の運送用の普通自動車、所定の乗車定員(例えば、11人)以上の普通自動車、特種用途の普通自動車又は大型特殊自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像部の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、撮像画像上で車色判定領域がほぼ縦方向になるので、車色判例領域の縦方向の辺を横軸に対して80°から100°にすることにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0032】
第11発明にあっては、検出した分類番号が貨物の運送用の普通自動車、所定の乗車定員以上の普通自動車、特種用途の普通自動車又は大型特殊自動車に対応する場合、番号標識から撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定する。貨物の運送用の普通自動車、所定の乗車定員(例えば、11人)以上の普通自動車、特種用途の普通自動車又は大型特殊自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像部の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、撮像画像上で車色判定領域がほぼ縦方向になるので、番号標識から撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0033】
第12発明にあっては、車両の番号標識の大きさを判定し、判定した番号標識の大きさ及び検出した分類番号に基づいて、特種用途の普通自動車又は特種用途の小型自動車のいずれかを判定する。番号標識の大きさの判定は、例えば、分類番号以外のプレート情報である車番の文字(一連番号)の大きさで判定することができる。例えば、番号標識の大きさは、大型番号標、中型番号標、小型番号標に区分することができる。そして、分類番号が特種用途の小型自動車及び特種用途の普通自動車である場合に、番号標識が大型番号標であれば特種用途の普通自動車であると判定することができ、また番号標識が中型番号標であれば特種用途の小型自動車であると判定することができる。これにより、分類番号が同じ場合でも車色判定領域を正しく特定することができる。
【発明の効果】
【0034】
本発明によれば、分類番号に基づいて車色判定領域の位置及び形状を特定するので、従来のように、車両の色を判定する判定領域を属性情報に基づいて判別するための高度な画像処理を行うことなく車両の色を判定することができる。
【図面の簡単な説明】
【0035】
【図1】本実施の形態の車色判定装置の構成の一例を示すブロック図である。
【図2】プレート認識用カメラで撮像したプレート用撮像画像の一例を示す説明図である。
【図3】ナンバープレートの一例を示す模式図である。
【図4】分類番号と自動車の種別及び用途との関係を示す説明図である。
【図5】車色判定領域の特定方法の概要を示す説明図である。
【図6】本実施の形態の車色判定装置による車色判定領域の第1の特定方法を示す説明図である。
【図7】第1の特定方法により特定された車色判定領域の一例を示す模式図である。
【図8】本実施の形態の車色判定装置による車色判定領域の第2の特定方法を示す説明図である。
【図9】第2の特定方法により特定された車色判定領域の一例を示す模式図である。
【図10】本実施の形態の車色判定装置による車色判定領域の第3の特定方法を示す説明図である。
【図11】第3の特定方法により特定された車色判定領域の一例を示す模式図である。
【図12】本実施の形態の車色判定装置による車色判定領域の第4の特定方法を示す説明図である。
【図13】第4の特定方法により特定された車色判定領域の一例を示す模式図である。
【図14】本実施の形態の車色判定装置による車色判定領域の第5の特定方法を示す説明図である。
【図15】第5の特定方法により特定された車色判定領域の一例を示す模式図である。
【図16】本実施の形態の車色判定装置の処理手順を示すフローチャートである。
【図17】本実施の形態の車色判定装置による車色判定の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0036】
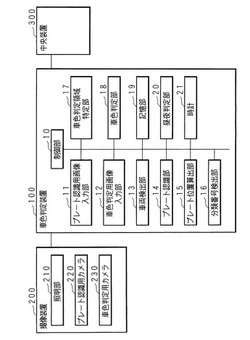
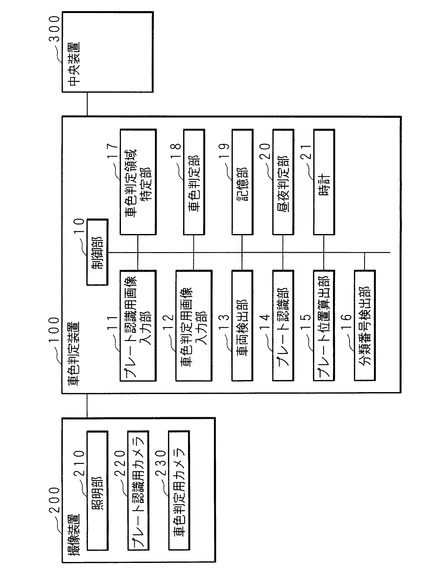
以下、本発明を実施の形態を示す図面に基づいて説明する。図1は本実施の形態の車色判定装置100の構成の一例を示すブロック図である。車色判定装置100には、撮像装置200及び中央装置300などを接続してある。なお、撮像装置200は、車色判定装置100に内蔵する構成であってもよい。
【0037】
撮像装置200は、照明部210、プレート認識用カメラ220、車色判定用カメラ230などを備えている。照明部210は、複数のLEDを備え、プレート認識用カメラ220で車両を撮像するタイミング(例えば、33msの都度)に併せて近赤外光を、道路を走行する車両に対して照射する。これにより、例えば、夜間においても、プレート認識用カメラ220で車両を撮像してナンバープレートを認識して登録番号を検出することができる。
【0038】
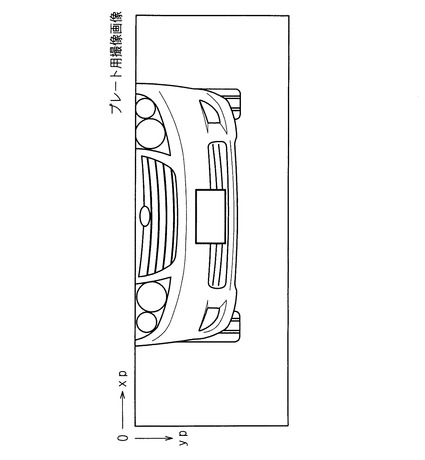
プレート認識用カメラ220は、道路を走行する車両を撮像し、撮像して得られた画像データを車色判定装置100へ出力する。プレート認識用カメラ220で撮像して得られるプレート用撮像画像(第1の撮像画像)は、例えば、白黒画像である。ここで、白黒画像は、白、黒、それらの中間のグレーなどで構成される濃淡画像である。
【0039】
車色判定用カメラ230は、道路を走行する車両を撮像し、撮像して得られた画像データを車色判定装置100へ出力する。車色判定用カメラ230で撮像して得られる色判定用撮像画像(第2の撮像画像)は、カラー画像である。
【0040】
プレート認識用カメラ220、車色判定用カメラ230は撮像装置200に内蔵され、すなわち、同一筐体内に組み込まれ、それぞれのカメラの取り付け位置、レンズの光軸等は、撮像装置200を製造する際に所定の位置に固定される。これにより、撮像装置200を道路脇に設置する場合、プレート認識用カメラ220、車色判定用カメラ230それぞれの取り付け位置を調整する必要はない。
【0041】
図2はプレート認識用カメラ220で撮像したプレート用撮像画像の一例を示す説明図である。図2に示すように、プレート用撮像画像は、高解像度であり、撮像画像の左上を座標の中心として横軸をxp、縦軸をypで示す。
【0042】
車色判定装置100は、装置内の各部を制御する制御部10、プレート認識用画像入力部11、車色判定用画像入力部12、車両検出部13、プレート認識部14、プレート位置算出部15、分類番号検出部16、車色判定領域特定部17、車色判定部18、記憶部19、昼夜判定部20、時計21などを備えている。
【0043】
プレート認識用画像入力部11は、プレート認識用カメラ220で撮像して得られた画像データを取得し、取得した画像データをフレーム単位に撮像時刻に対応付けて記憶部19に記憶する。
【0044】
車色判定用画像入力部12は、車色判定用カメラ230で撮像して得られた画像データを取得し、取得した画像データをフレーム単位に撮像時刻に対応付けて記憶部19に記憶する。
【0045】
車両検出部13は、プレート認識用カメラ220で撮像して得られた画像データを記憶部19から取り出し、取り出した画像データに基づいて、車両(車両の一部を含む)を検出する。車両の検出処理としては、例えば、車両が存在しない場合のプレート用撮像画像と車両が存在する場合のプレート用撮像画像との差に基づいて車両を検出することができる。車両検出部13は、検出した車両画像をプレート認識部14へ出力する。なお、車両画像は、プレート用撮像画像から車両の部分を抽出した車両部分のみの画像でもよく、あるいは、プレート用撮像画像の中の車両部分の範囲を特定するものでもよい。
【0046】
プレート認識部14は、検出された車両画像に基づいて、車両の番号標識としてのナンバープレート部の切り出し処理を行うことによりナンバープレートを認識する。プレート認識部14は、認識したナンバープレートのプレート画像、プレート用撮像画像上のナンバープレートの座標などをプレート位置算出部15、分類番号検出部16へ出力する。
【0047】
また、プレート認識部14は、切り出したナンバープレートの大きさを判定する。ナンバープレートの大きさの判定は、例えば、分類番号以外のプレート情報である車番の文字(一連番号)の大きさで判定することができる。例えば、ナンバープレートの大きさは、大型番号標、中型番号標、小型番号標に区分することができる。
【0048】
大型番号標の文字の寸法は、例えば、60mm×120mmであり、大型番号標は、車両総重量が8トン以上、最大積載量が5トン以上、又は乗車定員が30人以上の普通自動車に用いられる。また、中型番号標の文字の寸法は、例えば、40mm×80mmであり、中型番号標は、大型番号標及び小型番号標に該当しない、普通自動車、小型自動車、大型特殊自動車に用いられる。また、小型番号標の文字の寸法は、例えば、35mm×60mmであり、小型番号標は、小型二輪及び軽自動車の一部に用いられる。
【0049】
プレート位置算出部15は、内部に画像メモリを備え、プレート認識部14から出力されたプレート画像のプレート用撮像画像上の座標から、ナンバープレート部の所定の位置(例えば、矩形状のナンバープレート部の上部中央の位置、以下、「プレート位置」という)を算出するとともに、算出したプレート位置の座標(xp、yp)と、そのプレート用撮像画像の撮像時刻とを関連付けて画像メモリに記憶する。なお、プレート位置は、上述の位置に限定されるものではなく、ナンバープレート部の他の箇所であってもよい。
【0050】
分類番号検出部16は、プレート認識部14から出力されたプレート画像に基づいて、ナンバープレート上の分類番号を検出する。なお、分類番号検出部16は、プレート画像に基づいて、ナンバープレート上の車番(分類番号を除く)を検出することもできる。
【0051】
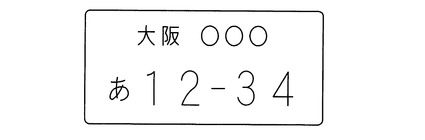
図3はナンバープレートの一例を示す模式図である。図3に示すように、分類番号は、ナンバープレートの地名の右側に表示され、自動車の大きさ(例えば、小型、普通又は大型など)及び用途(例えば、乗用、貨物、特種用途又は大型特殊など)を分類する1〜3桁の数字(図3の例では、○○○と表示)である。
【0052】
分類番号検出部16は、例えば、プレート画像を二値化した二値化画像と、車番テンプレートである参照画像とを入力とするマッチドフィルタにより、二値化画像と参照画像との類似度を示す相関分布を作成し、分類番号の数字毎に、相関分布の最大値が示す数字を検出することができる。
【0053】
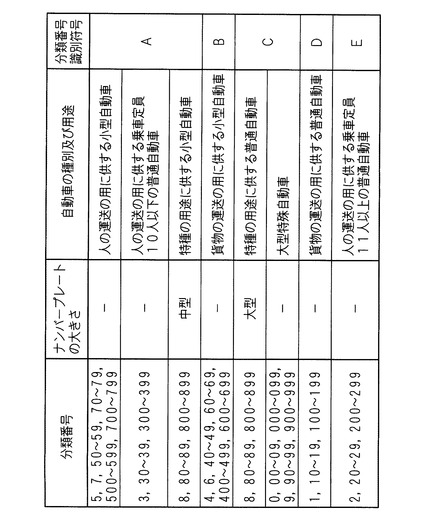
図4は分類番号と自動車の種別及び用途との関係を示す説明図である。図4において、分類番号識別符号は便宜上設定したものであり、分類番号識別符号は、分類番号及びナンバープレートの大きさ(例えば、一連番号の文字の大きさ)に応じた自動車の種別及び用途に基づいて車色判定領域の特定方法を区分するものである。別言すれば、分類番号識別符号に応じて車色判定領域の特定方法が異なる。車色判定領域を単に車種(例えば、小型、普通又は大型)に応じて特定するのではなく、自動車の分類番号及びナンバープレートの大きさに基づいて車色判定領域を特定することにより、車色判定領域を自動車の様々な形態に合わせて色判定のための最適な領域を高度な画像処理を行うことなく抽出することができる。
【0054】
図4に示すように、分類番号が5、7、50〜59、70〜79、500〜599、及び700〜799の場合、自動車の種別及び用途は、「人の運送の用に供する小型自動車」である。また、分類番号が3、30〜39、及び300〜399の場合、自動車の種別及び用途は、「人の運送の用に供する乗車定員10人以下の普通自動車」である。また、分類番号が8、80〜89、及び800〜899であって、ナンバープレートの大きさが中型(中型番号標)の場合、自動車の種別及び用途は、「特種の用途に供する小型自動車」である。前述の3通りの種別及び用途をまとめて、分類番号識別符号をAとする。
【0055】
分類番号が4、6、40〜49、60〜69、400〜499、及び600〜699の場合、自動車の種別及び用途は、「貨物の運送の用に供する小型自動車」であり、分類番号識別符号をBとする。
【0056】
分類番号が8、80〜89、及び800〜899であって、ナンバープレートの大きさが大型(大型番号標)の場合、自動車の種別及び用途は、「特種の用途に供する普通自動車」である。また、分類番号が0、00〜09、000〜099、9、90〜99、及び900〜999の場合、自動車の種別及び用途は、「大型特殊自動車」である。前述の2通りの種別及び用途をまとめて、分類番号識別符号をCとする。
【0057】
分類番号が1、10〜19、及び100〜199の場合、自動車の種別及び用途は、「貨物の運送の用に供する普通自動車」であり、分類番号識別符号をDとする。
【0058】
分類番号が2、20〜29、及び200〜299の場合、自動車の種別及び用途は、「人の運送の用に供する乗車定員11人以上の普通自動車」であり、分類番号識別符号をEとする。なお、軽自動車は小型自動車の一部として含まれる。
【0059】
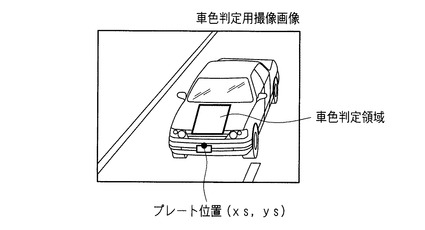
車色判定領域特定部17は、プレート位置算出部15で算出したプレート位置の座標(xp、yp)に対応する色判定用撮像画像上でのプレート位置の座標(xs、ys)を特定するとともに、分類番号検出部16で検出した分類番号に基づいて、色判定用撮像画像上の車色判定領域の形状及びプレート位置の座標(xs、ys)に対する位置を特定する。
【0060】
また、車色判定領域特定部17は、プレート認識部14で判定したナンバープレートの大きさ及び検出した分類番号に基づいて、特種用途の普通自動車又は特種用途の小型自動車のいずれかを判定する。これにより、分類番号が同じ場合でも車色判定領域を正しく特定することができる。
【0061】
図5は車色判定領域の特定方法の概要を示す説明図である。図5に示すように、車色判定領域の特定は、プレート位置の座標(xs、ys)からの距離及び方向を、検出した分類番号に応じて車色判定領域の位置を特定するとともに、検出した分類番号に応じて車色判定領域の形状及び大きさを特定する。
【0062】
なお、予め分類番号毎に、色判定用撮像画像上の車色判定領域の形状及び大きさ、番号標識に対する位置(例えば、距離、方向など)を定めた情報を記憶部19に記憶しておき、検出した分類番号に対応する車色判定領域を選択することができる。なお、車色判定領域の特定方法の詳細は後述する。
【0063】
車色判定部18は、車色判定領域特定部17で特定された車色判定領域の画素値を、例えば、RGBからHSI(H:色相、S:彩度、I:輝度)に変換し、彩度Sの値に応じて、有彩色か無彩色かを判定するとともに、色相H及び/又は輝度Iに基づいて車両の色を判定する。判定する色の種類は、適宜決定することができるが、例えば、色相Hの値に応じて、赤、黄、緑、水、青、紫などに区分することができ、また、輝度Iの値に応じて、白、灰、黒などに区分することができる。
【0064】
より具体的には、車色判定部18は、車色判定領域の全画素に対して、色相H、輝度Iを求め、画素毎に色を判定し、各色の画素数を集計する。車色判定部18は、集計した色毎の画素数に基づいて、車体の色を判定する。例えば、画素数が最も多い色を車体の色とすることができる。あるいは、所定の閾値以上の画素数であって、多い順に車体の色の第1候補、第2候補としてもよい。あるいは、所定の閾値以上の画素数のそれぞれの色を混合した色を車体の色と判定してもよい。
【0065】
車色判定部18は、後述する昼夜判定部20からの判定結果に応じて、例えば、昼間であれば、有彩色、無彩色を問わず色の判定を行い、夜間であれば、無彩色のみの色の判定を行う。
【0066】
昼夜判定部20は、時計21からの出力(時刻)に応じて、昼夜の別(例えば、昼モードか否か)を判定し、判定結果を車色判定部18へ出力する。
【0067】
車色判定装置100は、判定した車両の色を、車両を識別する識別情報(例えば、車番)などと対応付けた情報を中央装置300へ出力する。
【0068】
上述のように、検出した分類番号に基づいて車色判定領域の位置及び形状を特定するので、従来のように、車両の色を判定する判定領域を属性情報に基づいて判別するための高度な画像処理を行うことなく車両の色を判定することができる。また、車両の大きさ及び用途に応じて分類された分類番号に基づいて車色判定領域を特定するので、様々な種別の車両に応じた車色判定領域を特定することができ、車色判別に不要な部分が含まれることなく精度よく車色を判定することができる。
【0069】
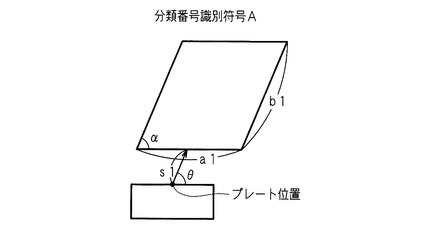
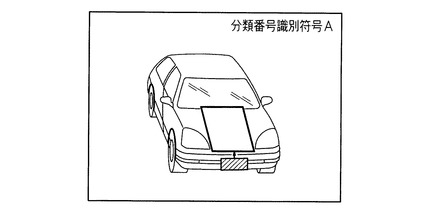
次に、分類番号に応じた車色判定領域の特定方法の具体例について説明する。図6は本実施の形態の車色判定装置100による車色判定領域の第1の特定方法を示す説明図であり、図7は第1の特定方法により特定された車色判定領域の一例を示す模式図である。図6及び図7で例示する車色判定領域は、図4の分類番号識別符号がAである場合に該当するものである。
【0070】
検出した分類番号が分類番号識別符号Aに該当する場合、すなわち、自動車の種別及び用途が、「人の運送用の小型自動車、人の運送の用に供する所定の乗車定員(例えば、10人)以下の普通自動車又は特種の用途の小型自動車」である場合、縦長の矩形状の領域を車色判定領域として特定する。
【0071】
より具体的には、図6に示すように、車色判定用撮像画像上で、プレート位置(xs、ys)から横軸に対して角度θをなす方向であって距離s1の位置に長さa1の底辺の中点があり、他方の対辺の長さb1、対角αの平行四辺形を車色判定領域として特定する。この場合、一方の対辺の長さa1と他方の対辺の長さb1とは、a1<b1の関係があり、車色判定領域は、縦長の平行四辺形(縦長の矩形状)となる。
【0072】
図7に示すように、人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種の用途の小型自動車の場合、ナンバープレートの上方に縦長の矩形状(縦長の長方形)のボンネット領域が存在するので、検出した分類番号が人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種の用途の小型自動車である場合には、番号標識(ナンバープレート)の上方位置にある縦長の矩形状(平行四辺形)の領域を車色判定領域として特定する。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0073】
なお、図6において、平行四辺形の対角α(所定の角度)は、車色判定用撮像画像上の横軸と道路の延伸方向とのなす角度とすることができる。すなわち、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。撮像装置200の設置条件に応じて、車両を斜め前から撮像した場合には、車色判定用撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、車色判例領域の縦方向の辺を横軸に対して道路の延伸方向だけ傾けることにより(車色判定領域を平行四辺形とすることにより)、車色判定領域に不要な部分が含まれることを防止することができる。
【0074】
また、図6において、角度θは、車色判定用撮像画像上の横軸と道路の延伸方向とのなす角度とすることができる。撮像装置200の設置条件に応じて、車両を斜め前から撮像した場合には、車色判定用撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、プレート位置から道路の延伸方向に沿った位置に車色判例領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0075】
なお、図6に示す、角度θ、α、長さ(距離)s1、a1、b1等は、車色判定領域の位置、形状及び大きさを特定するパラメータとして、予め経験的に算出しておき、分類番号と関連付けて記憶部19に記憶しておくことができる。なお、撮像装置200の設置状況に応じて、角度θ、αを適宜設定することができ、0°となる場合もある。この場合には、車色判定領域の形状は、平行四辺形に代えて、長方形又は正方形とすることができる。
【0076】
図8は本実施の形態の車色判定装置100による車色判定領域の第2の特定方法を示す説明図であり、図9は第2の特定方法により特定された車色判定領域の一例を示す模式図である。図8及び図9で例示する車色判定領域は、図4の分類番号識別符号がBである場合に該当するものである。
【0077】
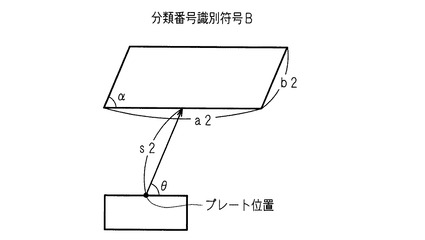
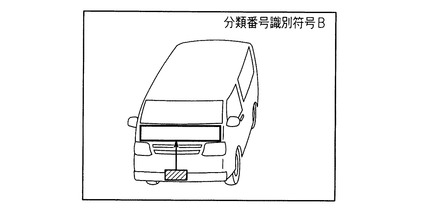
検出した分類番号が分類番号識別符号Bに該当する場合、すなわち、自動車の種別及び用途が、「貨物の運送の用に供する小型自動車」である場合、横長の矩形状の領域を車色判定領域として特定する。
【0078】
より具体的には、図8に示すように、車色判定用撮像画像上で、プレート位置(xs、ys)から横軸に対して角度θをなす方向であって距離s2の位置に長さa2の底辺の中点があり、他方の対辺の長さb2、対角αの平行四辺形を車色判定領域として特定する。この場合、一方の対辺の長さa2と他方の対辺の長さb2とは、a2>b2の関係があり、車色判定領域は、横長の平行四辺形(縦長の矩形状)となる。
【0079】
図9に示すように、貨物の運送用の小型自動車の場合、ナンバープレートの上方に横長の矩形状(横長の長方形)のボンネット領域が存在するので、検出した分類番号が貨物の運送用の小型自動車である場合には、番号標識(ナンバープレート)の上方位置にある横長の矩形状(平行四辺形)の領域を車色判定領域として特定する。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0080】
なお、図8において、平行四辺形の対角α(所定の角度)は、車色判定用撮像画像上の横軸と道路の延伸方向とのなす角度とすることができる。すなわち、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。撮像装置200の設置条件に応じて、車両を斜め前から撮像した場合には、車色判定用撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、車色判例領域の縦方向の辺を横軸に対して道路の延伸方向だけ傾けることにより(車色判定領域を平行四辺形とすることにより)、車色判定領域に不要な部分が含まれることを防止することができる。
【0081】
また、図8において、角度θは、車色判定用撮像画像上の横軸と道路の延伸方向とのなす角度とすることができる。撮像装置200の設置条件に応じて、車両を斜め前から撮像した場合には、車色判定用撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、プレート位置から道路の延伸方向に沿った位置に車色判例領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0082】
なお、図8に示す、角度θ、α、長さ(距離)s2、a2、b2等は、車色判定領域の位置、形状及び大きさを特定するパラメータとして、予め経験的に算出しておき、分類番号と関連付けて記憶部19に記憶しておくことができる。なお、撮像装置200の設置状況に応じて、角度θ、αを適宜設定することができ、0°となる場合もある。この場合には、車色判定領域の形状は、平行四辺形に代えて、長方形又は正方形とすることができる。
【0083】
上述の図6〜図9に示すように、検出した分類番号が小型自動車又は所定の乗車定員(例えば、10人)以下の普通自動車に対応する場合、車色判定用撮像画像上で番号標識(ナンバープレート)の上方位置にある矩形状の領域であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。車色判定用撮像画像上の矩形状の領域は、上述のように、例えば、平行四辺形である。小型自動車又は所定の乗車定員以下の普通自動車の場合、ナンバープレートの上方に矩形状(正方形又は長方形)のボンネット領域が存在するので、検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある矩形状の領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度αをなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が車色判定用撮像画像上で縦方向から撮像装置200の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0084】
図10は本実施の形態の車色判定装置100による車色判定領域の第3の特定方法を示す説明図であり、図11は第3の特定方法により特定された車色判定領域の一例を示す模式図である。図10及び図11で例示する車色判定領域は、図4の分類番号識別符号がCである場合に該当するものである。
【0085】
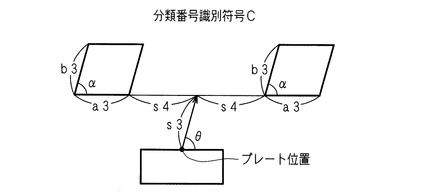
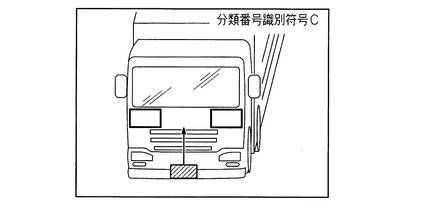
検出した分類番号が分類番号識別符号Cに該当する場合、すなわち、自動車の種別及び用途が、「特種の用途に供する普通自動車、大型特殊自動車」である場合、車色判定用撮像画像上で番号標識(ナンバープレート)の上方位置を間にして適長離隔した2つの矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。
【0086】
より具体的には、図10に示すように、車色判定用撮像画像上で、プレート位置(xs、ys)から横軸に対して角度θをなす方向であって距離s3の位置から、右横方向及び左横方向にそれぞれ距離S4だけ離れた位置に頂点があり、一方の対辺の長さa3、他方の対辺の長さb3、対角αの2つの平行四辺形を車色判定領域として特定する。
【0087】
図11に示すように、特種用途の普通自動車又は大型特殊自動車の場合、車両の前面にフロントグリル又は特殊構造物が存在し、車両の前面の両側に離隔して矩形状のボンネット領域が存在するので、これらのフロントグリル又は特殊構造物を避けて、番号標識(ナンバープレート)の上方位置を間にして適長離隔した2つの矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が車色判定用撮像画像上で縦方向から撮像装置200の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0088】
なお、図10において、平行四辺形の対角α(所定の角度)は、車色判定用撮像画像上の横軸方向に対して80°から100°である。特種用途の普通自動車又は大型特殊自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、車色判例領域の縦方向の辺を横軸に対して80°から100°にすることにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0089】
また、図10において、角度θは、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度とすることができる。特種用途の普通自動車又は大型特殊自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0090】
なお、図10に示す、角度θ、α、長さ(距離)s3、s4、a3、b3等は、車色判定領域の位置、形状及び大きさを特定するパラメータとして、予め経験的に算出しておき、分類番号と関連付けて記憶部19に記憶しておくことができる。なお、撮像装置200の設置状況に応じて、角度θ、αを適宜設定することができる。
【0091】
図12は本実施の形態の車色判定装置100による車色判定領域の第4の特定方法を示す説明図であり、図13は第4の特定方法により特定された車色判定領域の一例を示す模式図である。図12及び図13で例示する車色判定領域は、図4の分類番号識別符号がDである場合に該当するものである。
【0092】
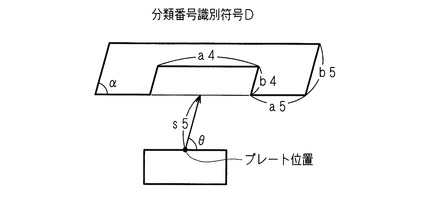
検出した分類番号が分類番号識別符号Dに該当する場合、すなわち、自動車の種別及び用途が、「貨物の運送の用に供する普通自動車」である場合、車色判定用撮像画像上でプレート位置の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度αをなし、当該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定する。
【0093】
より具体的には、図12に示すように、車色判定用撮像画像上で、プレート位置(xs、ys)から横軸に対して角度θをなす方向であって距離s5の位置に長さ(a4+2×a5)の底辺の中点があり、他方の対辺の長さb5、対角αの平行四辺形を特定するとともに、当該平行四辺形の下側中央を、一方の対辺がa4であり他方の対辺がb4の平行四辺形で切り抜いた形状を車色判定領域として特定する。
【0094】
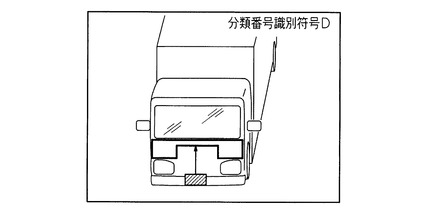
図13に示すように、貨物の運送用の普通自動車の場合、ナンバープレートの上方に矩形状のフロントグリルがあり、フロントグリルの両横及び上側にボンネット領域が存在するので、検出した分類番号が貨物の運送用の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が車色判定用撮像画像上で縦方向から撮像装置200の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0095】
なお、図12において、平行四辺形の対角α(所定の角度)は、車色判定用撮像画像上の横軸方向に対して80°から100°である。貨物の運送用の普通自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、車色判例領域の縦方向の辺を横軸に対して80°から100°にすることにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0096】
また、図12において、角度θは、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度とすることができる。貨物の運送用の普通自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0097】
なお、図12に示す、角度θ、α、長さ(距離)s5、a4、a5、b4、b5等は、車色判定領域の位置、形状及び大きさを特定するパラメータとして、予め経験的に算出しておき、分類番号と関連付けて記憶部19に記憶しておくことができる。なお、撮像装置200の設置状況に応じて、角度θ、αを適宜設定することができる。
【0098】
図14は本実施の形態の車色判定装置100による車色判定領域の第5の特定方法を示す説明図であり、図15は第5の特定方法により特定された車色判定領域の一例を示す模式図である。図14及び図15で例示する車色判定領域は、図4の分類番号識別符号がEである場合に該当するものである。
【0099】
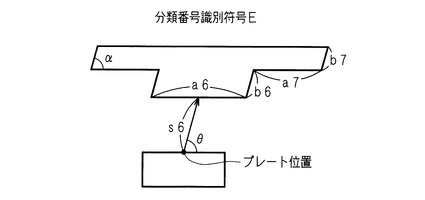
検出した分類番号が分類番号識別符号Eに該当する場合、すなわち、自動車の種別及び用途が、「人の運送の用に供する乗車定員11人以上の普通自動車」である場合、車色判定用撮像画像上でプレート位置の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定する。
【0100】
より具体的には、図14に示すように、車色判定用撮像画像上で、プレート位置(xs、ys)から横軸に対して角度θをなす方向であって距離(s6+b6)の位置に長さ(a6+2×a7)の底辺の中点があり、他方の対辺の長さb7、対角αの平行四辺形を特定するとともに、当該平行四辺形の下側中央に、一方の対辺がa6であり他方の対辺がb6の平行四辺形の領域を有する形状を車色判定領域として特定する。
【0101】
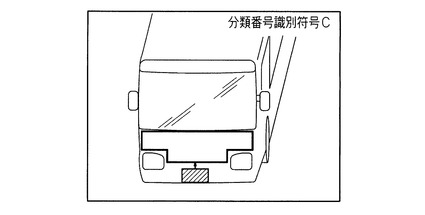
図15に示すように、所定の乗車定員(11人)以上の普通自動車の場合、フロントグリルがなく、ナンバープレートの上方に矩形状のボンネット領域があり、さらにその領域に連続して、2つのヘッドライトの上方に高さ寸法が短い矩形状のボンネット領域が存在するので、検出した分類番号が所定の乗車定員以上の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が車色判定用撮像画像上で縦方向から撮像装置200の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0102】
なお、図14において、平行四辺形の対角α(所定の角度)は、車色判定用撮像画像上の横軸方向に対して80°から100°である。所定の乗車定員以上の普通自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、車色判例領域の縦方向の辺を横軸に対して80°から100°にすることにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0103】
また、図14において、角度θは、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度とすることができる。所定の乗車定員以上の普通自動車、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0104】
なお、図14に示す、角度θ、α、長さ(距離)s6、a6、a7、b6、b7等は、車色判定領域の位置、形状及び大きさを特定するパラメータとして、予め経験的に算出しておき、分類番号と関連付けて記憶部19に記憶しておくことができる。なお、撮像装置200の設置状況に応じて、角度θ、αを適宜設定することができる。
【0105】
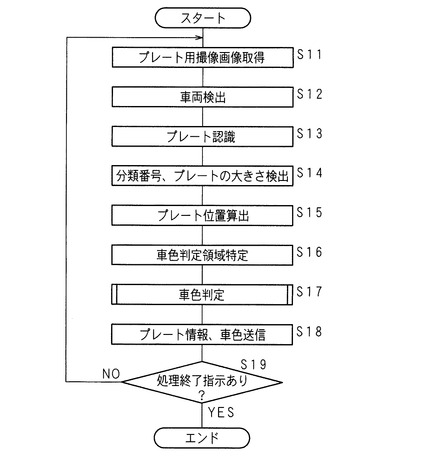
次に、車色判定装置100の動作について説明する。図16は本実施の形態の車色判定装置100の処理手順を示すフローチャートである。制御部10は、プレート用撮像画像を取得し(S11)、車両を検出する(S12)。制御部10は、車両画像から矩形状のナンバープレート部を抽出することにより、プレートを認識し(S13)、認識したプレートから分類番号を検出するとともに、分類番号以外のプレート情報(車番の文字情報)を認識し、その結果に基づいてプレート(ナンバープレート)の大きさを検出する(S14)。
【0106】
制御部10は、抽出したナンバープレート部の位置に基づいて、プレート位置を算出し(S15)、色判定用撮像画像上のプレート位置を求めることにより、車色判定領域を特定する(S16)。制御部10は、車色を判定する(S17)。なお、車色の判定処理の詳細は後述する。
【0107】
制御部10は、認識したプレート情報(車番の文字情報)、車色を関連付けて外部の中央装置へ送信し(S18)、処理終了指示の有無を判定する(S19)。処理終了指示がない場合(S19でNO)、制御部10は、ステップS11以降の処理を続け、処理終了指示があった場合(S19でYES)、処理を終了する。
【0108】
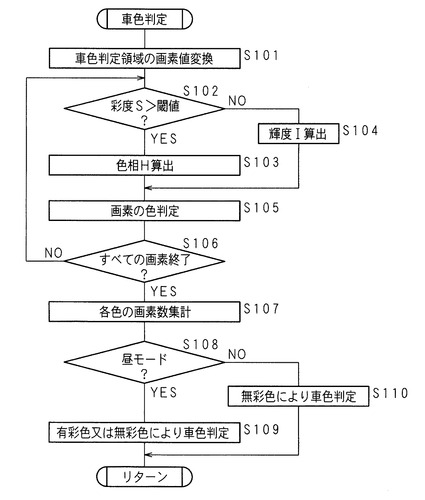
図17は本実施の形態の車色判定装置100による車色判定の処理手順を示すフローチャートである。制御部10は、車色判定領域の画素値(各画素の色成分)をRGBからHSI(H:色相、S:彩度、I:輝度)に変換し(S101)、彩度Sが所定の閾値(例えば、0.4)より大きいか否かを判定する(S102)。彩度Sが所定の閾値より大きい場合(S102でYES)、制御部10は、有彩色であるとして色相Hを算出し(S103)、彩度Sが所定の閾値より大きくない場合(S102でNO)、無彩色であるとして輝度Iを算出する(S104)。
【0109】
制御部10は、色相H又は輝度Iに基づいて、画素の色を判定し(S105)、車色判定領域のすべての画素の色判定が終了したか否かを判定する(S106)。すべての画素の色判定が終了していない場合(S106でNO)、制御部10は、ステップS102以降の処理を続ける。
【0110】
すべての画素の色判定が終了した場合(S106でYES)、制御部10は、判定した各色の画素数を集計し(S107)、昼モードか否かを判定する(S108)。昼モードである場合(S108でYES)、制御部10は、有彩色又は無彩色により車色を判定し(S109)、昼モードでない場合(S108でNO)、無彩色により車色を判定し(S110)、処理を終了する。
【0111】
本実施の形態の車色判定装置100は、CPU、RAMなどを備えた汎用コンピュータを用いて実現することもできる。すなわち、図16及び図17に示すような、各処理手順を定めたプログラムコードをコンピュータに備えられたRAMにロードし、プログラムコードをCPUで実行することにより、コンピュータ上で車色判定装置100を実現することができる。
【0112】
上述の実施の形態では、プレート認識用カメラ及び車色判定用カメラの2種類のカメラを用いる構成であったが、これに限定されるものではない。例えば、プレート認識用カメラを省略し、車色判定用カメラで撮像して得られた撮像画像を用いて、ナンバープレートの認識、分類番号の検出を行うとともに、車色判定を行うこともできる。
【0113】
上述の実施の形態において、車色判定領域の形状又は大きさ、ナンバープレートからの位置(距離及び方向)は、一例であって限定的なものではない。例えば、カメラの設置条件に応じて適宜設定値を変更することができる。また、自動車のデザインや流行に応じて、車色判定領域の形状又は大きさ等を適宜変更することもできる。本実施の形態では、車色判定領域を特定するためのパラメータを記憶する構成であるので、処理手順を変更することなくパラメータだけを置き換えることにより、様々な種類又は形態の車両に対する車色判定領域を容易に特定することができる。
【0114】
開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0115】
10 制御部
11 プレート認識用画像入力部
12 車色判定用画像入力部
13 車両検出部
14 プレート認識部(番号標識判定手段)
15 プレート位置算出部
16 分類番号検出部(分類番号検出手段)
17 車色判定領域特定部(車色判定領域特定手段、特種用途自動車判定手段)
18 車色判定部(車色判定手段)
19 記憶部
20 昼夜判定部
21 時計
【技術分野】
【0001】
本発明は、道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定する車色判定装置、該車色判定装置を実現するためのコンピュータプログラム及び車色判定方法に関する。
【背景技術】
【0002】
近年、交通監視などの分野において、特定の車両を抽出する技術の1つとして車両の色(車色)を判定する技術が開発されている。例えば、カメラで取得したカラー画像上の車両の特徴的な部分(例えば、ナンバープレート、サイドミラー、フロントミラー、ヘッドランプ等)を検出し、検出した部分を基にして車両の特定の部位(例えば、ボンネット領域、ルーフ領域、車両側面とドア領域、トランク領域等)を検出することにより、環境条件によらず車両の色を判別すべき部位を正確に抽出することができる特定部位抽出プログラムが開示されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2006−164193号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の技術は、例えば、車両の色を判別すべき部位としてボンネット領域を抽出する場合、ヘッドランプ及びサイドミラーそれぞれの位置情報を基にして、2つのヘッドランプの位置と2つのサイドミラーの位置を四角形の頂点とみなし、その四角形の対角線の交点を検出する。そして、検出した交点から円状に属性情報(例えば、測光量や色属性)の変化のない領域を抽出することにより、ボンネット領域を特定しなければならない。このため、車両の色を判別する際の不要な領域を除外するために高度な画像処理が必要となり、簡単な画像処理で車両の色を判定する技術が望まれていた。
【0005】
本発明は、斯かる事情に鑑みてなされたものであり、高度な画像処理を行うことなく車両の色を判定することができる車色判定装置、該車色判定装置を実現するためのコンピュータプログラム及び車色判定方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
第1発明に係る車色判定装置は、撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定する車色判定装置において、撮像画像に基づいて車両の番号標識上の分類番号を検出する分類番号検出手段と、該分類番号検出手段で検出した分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定する車色判定領域特定手段と、該車色判定領域特定手段で特定した車色判定領域の各画素の色成分に基づいて車両の色を判定する車色判定手段とを備えることを特徴とする。
【0007】
第2発明に係る車色判定装置は、第1発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある矩形状の領域であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定するように構成してあることを特徴とする。
【0008】
第3発明に係る車色判定装置は、第2発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種用途の小型自動車である場合、縦長の矩形状の領域を車色判定領域として特定するように構成してあることを特徴とする。
【0009】
第4発明に係る車色判定装置は、第2発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が貨物の運送用の小型自動車である場合、横長の矩形状の領域を車色判定領域として特定するように構成してあることを特徴とする。
【0010】
第5発明に係る車色判定装置は、第2発明乃至第4発明のいずれか1つにおいて、前記所定の角度は、前記撮像画像上の横軸と道路の延伸方向とのなす角度であることを特徴とする。
【0011】
第6発明に係る車色判定装置は、第2発明乃至第5発明のいずれか1つにおいて、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合、前記撮像画像上で前記番号標識から道路の延伸方向に沿った位置に車色判定領域を特定するように構成してあることを特徴とする。
【0012】
第7発明に係る車色判定装置は、第1発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が貨物の運送用の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある略矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなし、該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定するように構成してあることを特徴とする。
【0013】
第8発明に係る車色判定装置は、第1発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が所定の乗車定員以上の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある略矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなし、該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定するように構成してあることを特徴とする。
【0014】
第9発明に係る車色判定装置は、第1発明において、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が特種用途の普通自動車又は大型特殊自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置を間にして適長離隔した2つの矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定するように構成してあることを特徴とする。
【0015】
第10発明に係る車色判定装置は、第7発明乃至第9発明のいずれか1つにおいて、前記所定の角度は、前記撮像画像上の横軸方向に対して80°から100°であることを特徴とする。
【0016】
第11発明に係る車色判定装置は、第7発明乃至第10発明のいずれか1つにおいて、前記車色判定領域特定手段は、前記分類番号検出手段で検出した分類番号が貨物の運送用の普通自動車、所定の乗車定員以上の普通自動車、特種用途の普通自動車又は大型特殊自動車に対応する場合、前記番号標識から前記撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定するように構成してあることを特徴とする。
【0017】
第12発明に係る車色判定装置は、第2発明乃至第11発明のいずれか1つにおいて、車両の番号標識の大きさを判定する番号標識判定手段と、該番号標識判定手段で判定した番号標識の大きさ及び前記分類番号検出手段で検出した分類番号に基づいて、特種用途の普通自動車又は特種用途の小型自動車のいずれかを判定する特種用途自動車判定手段とを備えることを特徴とする。
【0018】
第13発明に係るコンピュータプログラムは、コンピュータに、撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定するステップを実行させるためのコンピュータプログラムにおいて、コンピュータに、撮像画像に基づいて車両の番号標識上の分類番号を検出するステップと、検出した分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定するステップと、特定した車色判定領域の各画素の色成分に基づいて車両の色を判定するステップとを実行させることを特徴とする。
【0019】
第14発明に係る車色判定方法は、撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定する車色判定装置による車色判定方法において、撮像画像に基づいて車両の番号標識上の分類番号を検出するステップと、検出された分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定するステップと、特定された車色判定領域の各画素の色成分に基づいて車両の色を判定するステップとを含むことを特徴とする。
【0020】
第1発明、第13発明及び第14発明にあっては、撮像画像に基づいて車両の番号標識(ナンバープレート)上の分類番号を検出する。分類番号は、ナンバープレートの地名の右側に表示され、自動車の大きさ(例えば、小型、普通又は大型など)及び用途(例えば、乗用、貨物、特種用途又は大型特殊など)を分類する1〜3桁の数字である。また、番号標識は、例えば、車両が存在しない場合の画像と車両が存在する場合の画像との差に基づいて車両を検出し、検出した車両の画像に基づいて、矩形状の番号標識の切り出し処理を行うことにより検出することができる。また、分類番号の検出は、一般的な文字認識処理により行うことができる。
【0021】
検出した分類番号に基づいて、撮像画像上の車色判定領域の形状及び番号標識に対する位置を特定する。なお、予め分類番号毎に、撮像画像上の車色判定領域の形状、番号標識に対する位置(例えば、距離、方向など)を定めておき、検出した分類番号に対応する車色判定領域を選択することができる。そして、特定した車色判定領域の各画素の色成分に基づいて車両の色を判定する。例えば、車色判定領域の各画素の色成分をRGBからHSI(H:色相、S:彩度、I:輝度)に変換し、色相H及び/又は輝度Iに基づいて車両の色を判定することができる。
【0022】
検出した分類番号に基づいて車色判定領域の位置及び形状を特定するので、従来のように、車両の色を判定する判定領域を属性情報に基づいて判別するための高度な画像処理を行うことなく車両の色を判定することができる。また、車両の大きさ及び用途に応じて分類された分類番号に基づいて車色判定領域を特定するので、様々な種別の車両に応じた車色判定領域を特定することができ、車色判別に不要な部分が含まれることなく精度よく車色を判定することができる。
【0023】
第2発明にあっては、検出した分類番号が小型自動車又は所定の乗車定員(例えば、10人)以下の普通自動車に対応する場合、撮像画像上で番号標識(ナンバープレート)の上方位置にある矩形状の領域であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。撮像画像上の矩形状の領域は、例えば、平行四辺形である。小型自動車又は所定の乗車定員以下の普通自動車の場合、ナンバープレートの上方に矩形状(正方形又は長方形)のボンネット領域が存在するので、検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある矩形状の領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が撮像画像上で縦方向から撮像部の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0024】
第3発明にあっては、検出した分類番号が人の運送用の小型自動車、所定の乗車定員(例えば、10人)以下の普通自動車又は特種の用途の小型自動車である場合、縦長の矩形状の領域を車色判定領域として特定する。人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種の用途の小型自動車の場合、ナンバープレートの上方に縦長の矩形状(縦長の長方形)のボンネット領域が存在するので、検出した分類番号が人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種の用途の小型自動車である場合には、番号標識(ナンバープレート)の上方位置にある縦長の矩形状の領域を車色判定領域として特定する。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0025】
第4発明にあっては、検出した分類番号が貨物の運送用の小型自動車である場合、横長の矩形状の領域を車色判定領域として特定する。貨物の運送用の小型自動車の場合、ナンバープレートの上方に横長の矩形状(横長の長方形)のボンネット領域が存在するので、検出した分類番号が貨物の運送用の小型自動である場合には、番号標識(ナンバープレート)の上方位置にある横長の矩形状の領域を車色判定領域として特定する。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0026】
第5発明にあっては、所定の角度は、撮像画像上の横軸と道路の延伸方向とのなす角度である。撮像部の設置条件に応じて、車両を斜め前から撮像した場合には、撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、車色判例領域の縦方向の辺を横軸に対して道路の延伸方向だけ傾けることにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0027】
第6発明にあっては、検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合、撮像画像上で番号標識から道路の延伸方向に沿った位置に車色判定領域を特定する。撮像部の設置条件に応じて、車両を斜め前から撮像した場合には、撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、番号標識から道路の延伸方向に沿った位置に車色判例領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0028】
第7発明にあっては、検出した分類番号が貨物の運送用の普通自動車に対応する場合、撮像画像上で番号標識の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定する。貨物の運送用の普通自動車の場合、ナンバープレートの上方に矩形状のフロントグリルがあり、フロントグリルの両横及び上側にボンネット領域が存在するので、検出した分類番号が貨物の運送用の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が撮像画像上で縦方向から撮像部の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0029】
第8発明にあっては、検出した分類番号が所定の乗車定員(例えば、11人)以上の普通自動車に対応する場合、撮像画像上で番号標識の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定する。所定の乗車定員以上の普通自動車の場合、ナンバープレートの上方に矩形状のボンネット領域があり、さらにその領域に連続して、2つのヘッドライトの上方に高さ寸法が短い矩形状のボンネット領域が存在するので、検出した分類番号が所定の乗車定員以上の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が撮像画像上で縦方向から撮像部の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0030】
第9発明にあっては、検出した分類番号が特種用途の普通自動車又は大型特殊自動車に対応する場合、撮像画像上で番号標識の上方位置を間にして適長離隔した2つの矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。特種用途の普通自動車又は大型特殊自動車の場合、車両の前面の両側に離隔して矩形状のボンネット領域が存在するので、検出した分類番号が特種用途の普通自動車又は大型特殊自動車に対応する場合には、番号標識(ナンバープレート)の上方位置を間にして適長離隔した2つの矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が撮像画像上で縦方向から撮像部の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0031】
第10発明にあっては、所定の角度は、撮像画像上の横軸方向に対して80°から100°である。貨物の運送用の普通自動車、所定の乗車定員(例えば、11人)以上の普通自動車、特種用途の普通自動車又は大型特殊自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像部の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、撮像画像上で車色判定領域がほぼ縦方向になるので、車色判例領域の縦方向の辺を横軸に対して80°から100°にすることにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0032】
第11発明にあっては、検出した分類番号が貨物の運送用の普通自動車、所定の乗車定員以上の普通自動車、特種用途の普通自動車又は大型特殊自動車に対応する場合、番号標識から撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定する。貨物の運送用の普通自動車、所定の乗車定員(例えば、11人)以上の普通自動車、特種用途の普通自動車又は大型特殊自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像部の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、撮像画像上で車色判定領域がほぼ縦方向になるので、番号標識から撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0033】
第12発明にあっては、車両の番号標識の大きさを判定し、判定した番号標識の大きさ及び検出した分類番号に基づいて、特種用途の普通自動車又は特種用途の小型自動車のいずれかを判定する。番号標識の大きさの判定は、例えば、分類番号以外のプレート情報である車番の文字(一連番号)の大きさで判定することができる。例えば、番号標識の大きさは、大型番号標、中型番号標、小型番号標に区分することができる。そして、分類番号が特種用途の小型自動車及び特種用途の普通自動車である場合に、番号標識が大型番号標であれば特種用途の普通自動車であると判定することができ、また番号標識が中型番号標であれば特種用途の小型自動車であると判定することができる。これにより、分類番号が同じ場合でも車色判定領域を正しく特定することができる。
【発明の効果】
【0034】
本発明によれば、分類番号に基づいて車色判定領域の位置及び形状を特定するので、従来のように、車両の色を判定する判定領域を属性情報に基づいて判別するための高度な画像処理を行うことなく車両の色を判定することができる。
【図面の簡単な説明】
【0035】
【図1】本実施の形態の車色判定装置の構成の一例を示すブロック図である。
【図2】プレート認識用カメラで撮像したプレート用撮像画像の一例を示す説明図である。
【図3】ナンバープレートの一例を示す模式図である。
【図4】分類番号と自動車の種別及び用途との関係を示す説明図である。
【図5】車色判定領域の特定方法の概要を示す説明図である。
【図6】本実施の形態の車色判定装置による車色判定領域の第1の特定方法を示す説明図である。
【図7】第1の特定方法により特定された車色判定領域の一例を示す模式図である。
【図8】本実施の形態の車色判定装置による車色判定領域の第2の特定方法を示す説明図である。
【図9】第2の特定方法により特定された車色判定領域の一例を示す模式図である。
【図10】本実施の形態の車色判定装置による車色判定領域の第3の特定方法を示す説明図である。
【図11】第3の特定方法により特定された車色判定領域の一例を示す模式図である。
【図12】本実施の形態の車色判定装置による車色判定領域の第4の特定方法を示す説明図である。
【図13】第4の特定方法により特定された車色判定領域の一例を示す模式図である。
【図14】本実施の形態の車色判定装置による車色判定領域の第5の特定方法を示す説明図である。
【図15】第5の特定方法により特定された車色判定領域の一例を示す模式図である。
【図16】本実施の形態の車色判定装置の処理手順を示すフローチャートである。
【図17】本実施の形態の車色判定装置による車色判定の処理手順を示すフローチャートである。
【発明を実施するための形態】
【0036】
以下、本発明を実施の形態を示す図面に基づいて説明する。図1は本実施の形態の車色判定装置100の構成の一例を示すブロック図である。車色判定装置100には、撮像装置200及び中央装置300などを接続してある。なお、撮像装置200は、車色判定装置100に内蔵する構成であってもよい。
【0037】
撮像装置200は、照明部210、プレート認識用カメラ220、車色判定用カメラ230などを備えている。照明部210は、複数のLEDを備え、プレート認識用カメラ220で車両を撮像するタイミング(例えば、33msの都度)に併せて近赤外光を、道路を走行する車両に対して照射する。これにより、例えば、夜間においても、プレート認識用カメラ220で車両を撮像してナンバープレートを認識して登録番号を検出することができる。
【0038】
プレート認識用カメラ220は、道路を走行する車両を撮像し、撮像して得られた画像データを車色判定装置100へ出力する。プレート認識用カメラ220で撮像して得られるプレート用撮像画像(第1の撮像画像)は、例えば、白黒画像である。ここで、白黒画像は、白、黒、それらの中間のグレーなどで構成される濃淡画像である。
【0039】
車色判定用カメラ230は、道路を走行する車両を撮像し、撮像して得られた画像データを車色判定装置100へ出力する。車色判定用カメラ230で撮像して得られる色判定用撮像画像(第2の撮像画像)は、カラー画像である。
【0040】
プレート認識用カメラ220、車色判定用カメラ230は撮像装置200に内蔵され、すなわち、同一筐体内に組み込まれ、それぞれのカメラの取り付け位置、レンズの光軸等は、撮像装置200を製造する際に所定の位置に固定される。これにより、撮像装置200を道路脇に設置する場合、プレート認識用カメラ220、車色判定用カメラ230それぞれの取り付け位置を調整する必要はない。
【0041】
図2はプレート認識用カメラ220で撮像したプレート用撮像画像の一例を示す説明図である。図2に示すように、プレート用撮像画像は、高解像度であり、撮像画像の左上を座標の中心として横軸をxp、縦軸をypで示す。
【0042】
車色判定装置100は、装置内の各部を制御する制御部10、プレート認識用画像入力部11、車色判定用画像入力部12、車両検出部13、プレート認識部14、プレート位置算出部15、分類番号検出部16、車色判定領域特定部17、車色判定部18、記憶部19、昼夜判定部20、時計21などを備えている。
【0043】
プレート認識用画像入力部11は、プレート認識用カメラ220で撮像して得られた画像データを取得し、取得した画像データをフレーム単位に撮像時刻に対応付けて記憶部19に記憶する。
【0044】
車色判定用画像入力部12は、車色判定用カメラ230で撮像して得られた画像データを取得し、取得した画像データをフレーム単位に撮像時刻に対応付けて記憶部19に記憶する。
【0045】
車両検出部13は、プレート認識用カメラ220で撮像して得られた画像データを記憶部19から取り出し、取り出した画像データに基づいて、車両(車両の一部を含む)を検出する。車両の検出処理としては、例えば、車両が存在しない場合のプレート用撮像画像と車両が存在する場合のプレート用撮像画像との差に基づいて車両を検出することができる。車両検出部13は、検出した車両画像をプレート認識部14へ出力する。なお、車両画像は、プレート用撮像画像から車両の部分を抽出した車両部分のみの画像でもよく、あるいは、プレート用撮像画像の中の車両部分の範囲を特定するものでもよい。
【0046】
プレート認識部14は、検出された車両画像に基づいて、車両の番号標識としてのナンバープレート部の切り出し処理を行うことによりナンバープレートを認識する。プレート認識部14は、認識したナンバープレートのプレート画像、プレート用撮像画像上のナンバープレートの座標などをプレート位置算出部15、分類番号検出部16へ出力する。
【0047】
また、プレート認識部14は、切り出したナンバープレートの大きさを判定する。ナンバープレートの大きさの判定は、例えば、分類番号以外のプレート情報である車番の文字(一連番号)の大きさで判定することができる。例えば、ナンバープレートの大きさは、大型番号標、中型番号標、小型番号標に区分することができる。
【0048】
大型番号標の文字の寸法は、例えば、60mm×120mmであり、大型番号標は、車両総重量が8トン以上、最大積載量が5トン以上、又は乗車定員が30人以上の普通自動車に用いられる。また、中型番号標の文字の寸法は、例えば、40mm×80mmであり、中型番号標は、大型番号標及び小型番号標に該当しない、普通自動車、小型自動車、大型特殊自動車に用いられる。また、小型番号標の文字の寸法は、例えば、35mm×60mmであり、小型番号標は、小型二輪及び軽自動車の一部に用いられる。
【0049】
プレート位置算出部15は、内部に画像メモリを備え、プレート認識部14から出力されたプレート画像のプレート用撮像画像上の座標から、ナンバープレート部の所定の位置(例えば、矩形状のナンバープレート部の上部中央の位置、以下、「プレート位置」という)を算出するとともに、算出したプレート位置の座標(xp、yp)と、そのプレート用撮像画像の撮像時刻とを関連付けて画像メモリに記憶する。なお、プレート位置は、上述の位置に限定されるものではなく、ナンバープレート部の他の箇所であってもよい。
【0050】
分類番号検出部16は、プレート認識部14から出力されたプレート画像に基づいて、ナンバープレート上の分類番号を検出する。なお、分類番号検出部16は、プレート画像に基づいて、ナンバープレート上の車番(分類番号を除く)を検出することもできる。
【0051】
図3はナンバープレートの一例を示す模式図である。図3に示すように、分類番号は、ナンバープレートの地名の右側に表示され、自動車の大きさ(例えば、小型、普通又は大型など)及び用途(例えば、乗用、貨物、特種用途又は大型特殊など)を分類する1〜3桁の数字(図3の例では、○○○と表示)である。
【0052】
分類番号検出部16は、例えば、プレート画像を二値化した二値化画像と、車番テンプレートである参照画像とを入力とするマッチドフィルタにより、二値化画像と参照画像との類似度を示す相関分布を作成し、分類番号の数字毎に、相関分布の最大値が示す数字を検出することができる。
【0053】
図4は分類番号と自動車の種別及び用途との関係を示す説明図である。図4において、分類番号識別符号は便宜上設定したものであり、分類番号識別符号は、分類番号及びナンバープレートの大きさ(例えば、一連番号の文字の大きさ)に応じた自動車の種別及び用途に基づいて車色判定領域の特定方法を区分するものである。別言すれば、分類番号識別符号に応じて車色判定領域の特定方法が異なる。車色判定領域を単に車種(例えば、小型、普通又は大型)に応じて特定するのではなく、自動車の分類番号及びナンバープレートの大きさに基づいて車色判定領域を特定することにより、車色判定領域を自動車の様々な形態に合わせて色判定のための最適な領域を高度な画像処理を行うことなく抽出することができる。
【0054】
図4に示すように、分類番号が5、7、50〜59、70〜79、500〜599、及び700〜799の場合、自動車の種別及び用途は、「人の運送の用に供する小型自動車」である。また、分類番号が3、30〜39、及び300〜399の場合、自動車の種別及び用途は、「人の運送の用に供する乗車定員10人以下の普通自動車」である。また、分類番号が8、80〜89、及び800〜899であって、ナンバープレートの大きさが中型(中型番号標)の場合、自動車の種別及び用途は、「特種の用途に供する小型自動車」である。前述の3通りの種別及び用途をまとめて、分類番号識別符号をAとする。
【0055】
分類番号が4、6、40〜49、60〜69、400〜499、及び600〜699の場合、自動車の種別及び用途は、「貨物の運送の用に供する小型自動車」であり、分類番号識別符号をBとする。
【0056】
分類番号が8、80〜89、及び800〜899であって、ナンバープレートの大きさが大型(大型番号標)の場合、自動車の種別及び用途は、「特種の用途に供する普通自動車」である。また、分類番号が0、00〜09、000〜099、9、90〜99、及び900〜999の場合、自動車の種別及び用途は、「大型特殊自動車」である。前述の2通りの種別及び用途をまとめて、分類番号識別符号をCとする。
【0057】
分類番号が1、10〜19、及び100〜199の場合、自動車の種別及び用途は、「貨物の運送の用に供する普通自動車」であり、分類番号識別符号をDとする。
【0058】
分類番号が2、20〜29、及び200〜299の場合、自動車の種別及び用途は、「人の運送の用に供する乗車定員11人以上の普通自動車」であり、分類番号識別符号をEとする。なお、軽自動車は小型自動車の一部として含まれる。
【0059】
車色判定領域特定部17は、プレート位置算出部15で算出したプレート位置の座標(xp、yp)に対応する色判定用撮像画像上でのプレート位置の座標(xs、ys)を特定するとともに、分類番号検出部16で検出した分類番号に基づいて、色判定用撮像画像上の車色判定領域の形状及びプレート位置の座標(xs、ys)に対する位置を特定する。
【0060】
また、車色判定領域特定部17は、プレート認識部14で判定したナンバープレートの大きさ及び検出した分類番号に基づいて、特種用途の普通自動車又は特種用途の小型自動車のいずれかを判定する。これにより、分類番号が同じ場合でも車色判定領域を正しく特定することができる。
【0061】
図5は車色判定領域の特定方法の概要を示す説明図である。図5に示すように、車色判定領域の特定は、プレート位置の座標(xs、ys)からの距離及び方向を、検出した分類番号に応じて車色判定領域の位置を特定するとともに、検出した分類番号に応じて車色判定領域の形状及び大きさを特定する。
【0062】
なお、予め分類番号毎に、色判定用撮像画像上の車色判定領域の形状及び大きさ、番号標識に対する位置(例えば、距離、方向など)を定めた情報を記憶部19に記憶しておき、検出した分類番号に対応する車色判定領域を選択することができる。なお、車色判定領域の特定方法の詳細は後述する。
【0063】
車色判定部18は、車色判定領域特定部17で特定された車色判定領域の画素値を、例えば、RGBからHSI(H:色相、S:彩度、I:輝度)に変換し、彩度Sの値に応じて、有彩色か無彩色かを判定するとともに、色相H及び/又は輝度Iに基づいて車両の色を判定する。判定する色の種類は、適宜決定することができるが、例えば、色相Hの値に応じて、赤、黄、緑、水、青、紫などに区分することができ、また、輝度Iの値に応じて、白、灰、黒などに区分することができる。
【0064】
より具体的には、車色判定部18は、車色判定領域の全画素に対して、色相H、輝度Iを求め、画素毎に色を判定し、各色の画素数を集計する。車色判定部18は、集計した色毎の画素数に基づいて、車体の色を判定する。例えば、画素数が最も多い色を車体の色とすることができる。あるいは、所定の閾値以上の画素数であって、多い順に車体の色の第1候補、第2候補としてもよい。あるいは、所定の閾値以上の画素数のそれぞれの色を混合した色を車体の色と判定してもよい。
【0065】
車色判定部18は、後述する昼夜判定部20からの判定結果に応じて、例えば、昼間であれば、有彩色、無彩色を問わず色の判定を行い、夜間であれば、無彩色のみの色の判定を行う。
【0066】
昼夜判定部20は、時計21からの出力(時刻)に応じて、昼夜の別(例えば、昼モードか否か)を判定し、判定結果を車色判定部18へ出力する。
【0067】
車色判定装置100は、判定した車両の色を、車両を識別する識別情報(例えば、車番)などと対応付けた情報を中央装置300へ出力する。
【0068】
上述のように、検出した分類番号に基づいて車色判定領域の位置及び形状を特定するので、従来のように、車両の色を判定する判定領域を属性情報に基づいて判別するための高度な画像処理を行うことなく車両の色を判定することができる。また、車両の大きさ及び用途に応じて分類された分類番号に基づいて車色判定領域を特定するので、様々な種別の車両に応じた車色判定領域を特定することができ、車色判別に不要な部分が含まれることなく精度よく車色を判定することができる。
【0069】
次に、分類番号に応じた車色判定領域の特定方法の具体例について説明する。図6は本実施の形態の車色判定装置100による車色判定領域の第1の特定方法を示す説明図であり、図7は第1の特定方法により特定された車色判定領域の一例を示す模式図である。図6及び図7で例示する車色判定領域は、図4の分類番号識別符号がAである場合に該当するものである。
【0070】
検出した分類番号が分類番号識別符号Aに該当する場合、すなわち、自動車の種別及び用途が、「人の運送用の小型自動車、人の運送の用に供する所定の乗車定員(例えば、10人)以下の普通自動車又は特種の用途の小型自動車」である場合、縦長の矩形状の領域を車色判定領域として特定する。
【0071】
より具体的には、図6に示すように、車色判定用撮像画像上で、プレート位置(xs、ys)から横軸に対して角度θをなす方向であって距離s1の位置に長さa1の底辺の中点があり、他方の対辺の長さb1、対角αの平行四辺形を車色判定領域として特定する。この場合、一方の対辺の長さa1と他方の対辺の長さb1とは、a1<b1の関係があり、車色判定領域は、縦長の平行四辺形(縦長の矩形状)となる。
【0072】
図7に示すように、人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種の用途の小型自動車の場合、ナンバープレートの上方に縦長の矩形状(縦長の長方形)のボンネット領域が存在するので、検出した分類番号が人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種の用途の小型自動車である場合には、番号標識(ナンバープレート)の上方位置にある縦長の矩形状(平行四辺形)の領域を車色判定領域として特定する。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0073】
なお、図6において、平行四辺形の対角α(所定の角度)は、車色判定用撮像画像上の横軸と道路の延伸方向とのなす角度とすることができる。すなわち、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。撮像装置200の設置条件に応じて、車両を斜め前から撮像した場合には、車色判定用撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、車色判例領域の縦方向の辺を横軸に対して道路の延伸方向だけ傾けることにより(車色判定領域を平行四辺形とすることにより)、車色判定領域に不要な部分が含まれることを防止することができる。
【0074】
また、図6において、角度θは、車色判定用撮像画像上の横軸と道路の延伸方向とのなす角度とすることができる。撮像装置200の設置条件に応じて、車両を斜め前から撮像した場合には、車色判定用撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、プレート位置から道路の延伸方向に沿った位置に車色判例領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0075】
なお、図6に示す、角度θ、α、長さ(距離)s1、a1、b1等は、車色判定領域の位置、形状及び大きさを特定するパラメータとして、予め経験的に算出しておき、分類番号と関連付けて記憶部19に記憶しておくことができる。なお、撮像装置200の設置状況に応じて、角度θ、αを適宜設定することができ、0°となる場合もある。この場合には、車色判定領域の形状は、平行四辺形に代えて、長方形又は正方形とすることができる。
【0076】
図8は本実施の形態の車色判定装置100による車色判定領域の第2の特定方法を示す説明図であり、図9は第2の特定方法により特定された車色判定領域の一例を示す模式図である。図8及び図9で例示する車色判定領域は、図4の分類番号識別符号がBである場合に該当するものである。
【0077】
検出した分類番号が分類番号識別符号Bに該当する場合、すなわち、自動車の種別及び用途が、「貨物の運送の用に供する小型自動車」である場合、横長の矩形状の領域を車色判定領域として特定する。
【0078】
より具体的には、図8に示すように、車色判定用撮像画像上で、プレート位置(xs、ys)から横軸に対して角度θをなす方向であって距離s2の位置に長さa2の底辺の中点があり、他方の対辺の長さb2、対角αの平行四辺形を車色判定領域として特定する。この場合、一方の対辺の長さa2と他方の対辺の長さb2とは、a2>b2の関係があり、車色判定領域は、横長の平行四辺形(縦長の矩形状)となる。
【0079】
図9に示すように、貨物の運送用の小型自動車の場合、ナンバープレートの上方に横長の矩形状(横長の長方形)のボンネット領域が存在するので、検出した分類番号が貨物の運送用の小型自動車である場合には、番号標識(ナンバープレート)の上方位置にある横長の矩形状(平行四辺形)の領域を車色判定領域として特定する。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0080】
なお、図8において、平行四辺形の対角α(所定の角度)は、車色判定用撮像画像上の横軸と道路の延伸方向とのなす角度とすることができる。すなわち、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。撮像装置200の設置条件に応じて、車両を斜め前から撮像した場合には、車色判定用撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、車色判例領域の縦方向の辺を横軸に対して道路の延伸方向だけ傾けることにより(車色判定領域を平行四辺形とすることにより)、車色判定領域に不要な部分が含まれることを防止することができる。
【0081】
また、図8において、角度θは、車色判定用撮像画像上の横軸と道路の延伸方向とのなす角度とすることができる。撮像装置200の設置条件に応じて、車両を斜め前から撮像した場合には、車色判定用撮像画像上で車色判定領域が縦方向ではなく、横軸に対して道路の延伸方向に傾くので、プレート位置から道路の延伸方向に沿った位置に車色判例領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0082】
なお、図8に示す、角度θ、α、長さ(距離)s2、a2、b2等は、車色判定領域の位置、形状及び大きさを特定するパラメータとして、予め経験的に算出しておき、分類番号と関連付けて記憶部19に記憶しておくことができる。なお、撮像装置200の設置状況に応じて、角度θ、αを適宜設定することができ、0°となる場合もある。この場合には、車色判定領域の形状は、平行四辺形に代えて、長方形又は正方形とすることができる。
【0083】
上述の図6〜図9に示すように、検出した分類番号が小型自動車又は所定の乗車定員(例えば、10人)以下の普通自動車に対応する場合、車色判定用撮像画像上で番号標識(ナンバープレート)の上方位置にある矩形状の領域であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。車色判定用撮像画像上の矩形状の領域は、上述のように、例えば、平行四辺形である。小型自動車又は所定の乗車定員以下の普通自動車の場合、ナンバープレートの上方に矩形状(正方形又は長方形)のボンネット領域が存在するので、検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある矩形状の領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度αをなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が車色判定用撮像画像上で縦方向から撮像装置200の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0084】
図10は本実施の形態の車色判定装置100による車色判定領域の第3の特定方法を示す説明図であり、図11は第3の特定方法により特定された車色判定領域の一例を示す模式図である。図10及び図11で例示する車色判定領域は、図4の分類番号識別符号がCである場合に該当するものである。
【0085】
検出した分類番号が分類番号識別符号Cに該当する場合、すなわち、自動車の種別及び用途が、「特種の用途に供する普通自動車、大型特殊自動車」である場合、車色判定用撮像画像上で番号標識(ナンバープレート)の上方位置を間にして適長離隔した2つの矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。
【0086】
より具体的には、図10に示すように、車色判定用撮像画像上で、プレート位置(xs、ys)から横軸に対して角度θをなす方向であって距離s3の位置から、右横方向及び左横方向にそれぞれ距離S4だけ離れた位置に頂点があり、一方の対辺の長さa3、他方の対辺の長さb3、対角αの2つの平行四辺形を車色判定領域として特定する。
【0087】
図11に示すように、特種用途の普通自動車又は大型特殊自動車の場合、車両の前面にフロントグリル又は特殊構造物が存在し、車両の前面の両側に離隔して矩形状のボンネット領域が存在するので、これらのフロントグリル又は特殊構造物を避けて、番号標識(ナンバープレート)の上方位置を間にして適長離隔した2つの矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が車色判定用撮像画像上で縦方向から撮像装置200の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0088】
なお、図10において、平行四辺形の対角α(所定の角度)は、車色判定用撮像画像上の横軸方向に対して80°から100°である。特種用途の普通自動車又は大型特殊自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、車色判例領域の縦方向の辺を横軸に対して80°から100°にすることにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0089】
また、図10において、角度θは、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度とすることができる。特種用途の普通自動車又は大型特殊自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0090】
なお、図10に示す、角度θ、α、長さ(距離)s3、s4、a3、b3等は、車色判定領域の位置、形状及び大きさを特定するパラメータとして、予め経験的に算出しておき、分類番号と関連付けて記憶部19に記憶しておくことができる。なお、撮像装置200の設置状況に応じて、角度θ、αを適宜設定することができる。
【0091】
図12は本実施の形態の車色判定装置100による車色判定領域の第4の特定方法を示す説明図であり、図13は第4の特定方法により特定された車色判定領域の一例を示す模式図である。図12及び図13で例示する車色判定領域は、図4の分類番号識別符号がDである場合に該当するものである。
【0092】
検出した分類番号が分類番号識別符号Dに該当する場合、すなわち、自動車の種別及び用途が、「貨物の運送の用に供する普通自動車」である場合、車色判定用撮像画像上でプレート位置の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度αをなし、当該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定する。
【0093】
より具体的には、図12に示すように、車色判定用撮像画像上で、プレート位置(xs、ys)から横軸に対して角度θをなす方向であって距離s5の位置に長さ(a4+2×a5)の底辺の中点があり、他方の対辺の長さb5、対角αの平行四辺形を特定するとともに、当該平行四辺形の下側中央を、一方の対辺がa4であり他方の対辺がb4の平行四辺形で切り抜いた形状を車色判定領域として特定する。
【0094】
図13に示すように、貨物の運送用の普通自動車の場合、ナンバープレートの上方に矩形状のフロントグリルがあり、フロントグリルの両横及び上側にボンネット領域が存在するので、検出した分類番号が貨物の運送用の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が車色判定用撮像画像上で縦方向から撮像装置200の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0095】
なお、図12において、平行四辺形の対角α(所定の角度)は、車色判定用撮像画像上の横軸方向に対して80°から100°である。貨物の運送用の普通自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、車色判例領域の縦方向の辺を横軸に対して80°から100°にすることにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0096】
また、図12において、角度θは、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度とすることができる。貨物の運送用の普通自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0097】
なお、図12に示す、角度θ、α、長さ(距離)s5、a4、a5、b4、b5等は、車色判定領域の位置、形状及び大きさを特定するパラメータとして、予め経験的に算出しておき、分類番号と関連付けて記憶部19に記憶しておくことができる。なお、撮像装置200の設置状況に応じて、角度θ、αを適宜設定することができる。
【0098】
図14は本実施の形態の車色判定装置100による車色判定領域の第5の特定方法を示す説明図であり、図15は第5の特定方法により特定された車色判定領域の一例を示す模式図である。図14及び図15で例示する車色判定領域は、図4の分類番号識別符号がEである場合に該当するものである。
【0099】
検出した分類番号が分類番号識別符号Eに該当する場合、すなわち、自動車の種別及び用途が、「人の運送の用に供する乗車定員11人以上の普通自動車」である場合、車色判定用撮像画像上でプレート位置の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定する。
【0100】
より具体的には、図14に示すように、車色判定用撮像画像上で、プレート位置(xs、ys)から横軸に対して角度θをなす方向であって距離(s6+b6)の位置に長さ(a6+2×a7)の底辺の中点があり、他方の対辺の長さb7、対角αの平行四辺形を特定するとともに、当該平行四辺形の下側中央に、一方の対辺がa6であり他方の対辺がb6の平行四辺形の領域を有する形状を車色判定領域として特定する。
【0101】
図15に示すように、所定の乗車定員(11人)以上の普通自動車の場合、フロントグリルがなく、ナンバープレートの上方に矩形状のボンネット領域があり、さらにその領域に連続して、2つのヘッドライトの上方に高さ寸法が短い矩形状のボンネット領域が存在するので、検出した分類番号が所定の乗車定員以上の普通自動車に対応する場合には、番号標識(ナンバープレート)の上方位置にある略矩形状であって、当該矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなし、当該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定する。また、矩形状の縦方向の辺が撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域とするのは、車両を斜め前から撮像した場合には、車色判定領域が車色判定用撮像画像上で縦方向から撮像装置200の設置状態に応じた角度だけ傾くので、これを考慮したものである。分類番号に基づいて車色判定領域を特定するので、高度な画像処理を行うことなく車両の色を判定することができる。
【0102】
なお、図14において、平行四辺形の対角α(所定の角度)は、車色判定用撮像画像上の横軸方向に対して80°から100°である。所定の乗車定員以上の普通自動車の場合、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、車色判例領域の縦方向の辺を横軸に対して80°から100°にすることにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0103】
また、図14において、角度θは、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度とすることができる。所定の乗車定員以上の普通自動車、小型自動車などの場合に比べて車両の前面がほぼ垂直になっているとともに比較的面積が広い。このため、撮像装置200の設置条件に応じて、車両を真正面ではなく斜め前から撮像した場合でも、車色判定用撮像画像上で車色判定領域がほぼ縦方向になるので、プレート位置から車色判定用撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定することにより、車色判定領域に不要な部分が含まれることを防止することができる。
【0104】
なお、図14に示す、角度θ、α、長さ(距離)s6、a6、a7、b6、b7等は、車色判定領域の位置、形状及び大きさを特定するパラメータとして、予め経験的に算出しておき、分類番号と関連付けて記憶部19に記憶しておくことができる。なお、撮像装置200の設置状況に応じて、角度θ、αを適宜設定することができる。
【0105】
次に、車色判定装置100の動作について説明する。図16は本実施の形態の車色判定装置100の処理手順を示すフローチャートである。制御部10は、プレート用撮像画像を取得し(S11)、車両を検出する(S12)。制御部10は、車両画像から矩形状のナンバープレート部を抽出することにより、プレートを認識し(S13)、認識したプレートから分類番号を検出するとともに、分類番号以外のプレート情報(車番の文字情報)を認識し、その結果に基づいてプレート(ナンバープレート)の大きさを検出する(S14)。
【0106】
制御部10は、抽出したナンバープレート部の位置に基づいて、プレート位置を算出し(S15)、色判定用撮像画像上のプレート位置を求めることにより、車色判定領域を特定する(S16)。制御部10は、車色を判定する(S17)。なお、車色の判定処理の詳細は後述する。
【0107】
制御部10は、認識したプレート情報(車番の文字情報)、車色を関連付けて外部の中央装置へ送信し(S18)、処理終了指示の有無を判定する(S19)。処理終了指示がない場合(S19でNO)、制御部10は、ステップS11以降の処理を続け、処理終了指示があった場合(S19でYES)、処理を終了する。
【0108】
図17は本実施の形態の車色判定装置100による車色判定の処理手順を示すフローチャートである。制御部10は、車色判定領域の画素値(各画素の色成分)をRGBからHSI(H:色相、S:彩度、I:輝度)に変換し(S101)、彩度Sが所定の閾値(例えば、0.4)より大きいか否かを判定する(S102)。彩度Sが所定の閾値より大きい場合(S102でYES)、制御部10は、有彩色であるとして色相Hを算出し(S103)、彩度Sが所定の閾値より大きくない場合(S102でNO)、無彩色であるとして輝度Iを算出する(S104)。
【0109】
制御部10は、色相H又は輝度Iに基づいて、画素の色を判定し(S105)、車色判定領域のすべての画素の色判定が終了したか否かを判定する(S106)。すべての画素の色判定が終了していない場合(S106でNO)、制御部10は、ステップS102以降の処理を続ける。
【0110】
すべての画素の色判定が終了した場合(S106でYES)、制御部10は、判定した各色の画素数を集計し(S107)、昼モードか否かを判定する(S108)。昼モードである場合(S108でYES)、制御部10は、有彩色又は無彩色により車色を判定し(S109)、昼モードでない場合(S108でNO)、無彩色により車色を判定し(S110)、処理を終了する。
【0111】
本実施の形態の車色判定装置100は、CPU、RAMなどを備えた汎用コンピュータを用いて実現することもできる。すなわち、図16及び図17に示すような、各処理手順を定めたプログラムコードをコンピュータに備えられたRAMにロードし、プログラムコードをCPUで実行することにより、コンピュータ上で車色判定装置100を実現することができる。
【0112】
上述の実施の形態では、プレート認識用カメラ及び車色判定用カメラの2種類のカメラを用いる構成であったが、これに限定されるものではない。例えば、プレート認識用カメラを省略し、車色判定用カメラで撮像して得られた撮像画像を用いて、ナンバープレートの認識、分類番号の検出を行うとともに、車色判定を行うこともできる。
【0113】
上述の実施の形態において、車色判定領域の形状又は大きさ、ナンバープレートからの位置(距離及び方向)は、一例であって限定的なものではない。例えば、カメラの設置条件に応じて適宜設定値を変更することができる。また、自動車のデザインや流行に応じて、車色判定領域の形状又は大きさ等を適宜変更することもできる。本実施の形態では、車色判定領域を特定するためのパラメータを記憶する構成であるので、処理手順を変更することなくパラメータだけを置き換えることにより、様々な種類又は形態の車両に対する車色判定領域を容易に特定することができる。
【0114】
開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。
【符号の説明】
【0115】
10 制御部
11 プレート認識用画像入力部
12 車色判定用画像入力部
13 車両検出部
14 プレート認識部(番号標識判定手段)
15 プレート位置算出部
16 分類番号検出部(分類番号検出手段)
17 車色判定領域特定部(車色判定領域特定手段、特種用途自動車判定手段)
18 車色判定部(車色判定手段)
19 記憶部
20 昼夜判定部
21 時計
【特許請求の範囲】
【請求項1】
撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定する車色判定装置において、
撮像画像に基づいて車両の番号標識上の分類番号を検出する分類番号検出手段と、
該分類番号検出手段で検出した分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定する車色判定領域特定手段と、
該車色判定領域特定手段で特定した車色判定領域の各画素の色成分に基づいて車両の色を判定する車色判定手段と
を備えることを特徴とする車色判定装置。
【請求項2】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある矩形状の領域であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定するように構成してあることを特徴とする請求項1に記載の車色判定装置。
【請求項3】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種用途の小型自動車である場合、縦長の矩形状の領域を車色判定領域として特定するように構成してあることを特徴とする請求項2に記載の車色判定装置。
【請求項4】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が貨物の運送用の小型自動車である場合、横長の矩形状の領域を車色判定領域として特定するように構成してあることを特徴とする請求項2に記載の車色判定装置。
【請求項5】
前記所定の角度は、前記撮像画像上の横軸と道路の延伸方向とのなす角度であることを特徴とする請求項2乃至請求項4のいずれか1項に記載の車色判定装置。
【請求項6】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合、前記撮像画像上で前記番号標識から道路の延伸方向に沿った位置に車色判定領域を特定するように構成してあることを特徴とする請求項2乃至請求項5のいずれか1項に記載の車色判定装置。
【請求項7】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が貨物の運送用の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある略矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなし、該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定するように構成してあることを特徴とする請求項1に記載の車色判定装置。
【請求項8】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が所定の乗車定員以上の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある略矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなし、該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定するように構成してあることを特徴とする請求項1に記載の車色判定装置。
【請求項9】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が特種用途の普通自動車又は大型特殊自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置を間にして適長離隔した2つの矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定するように構成してあることを特徴とする請求項1に記載の車色判定装置。
【請求項10】
前記所定の角度は、前記撮像画像上の横軸方向に対して80°から100°であることを特徴とする請求項7乃至請求項9のいずれか1項に記載の車色判定装置。
【請求項11】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が貨物の運送用の普通自動車、所定の乗車定員以上の普通自動車、特種用途の普通自動車又は大型特殊自動車に対応する場合、前記番号標識から前記撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定するように構成してあることを特徴とする請求項7乃至請求項10のいずれか1項に記載の車色判定装置。
【請求項12】
車両の番号標識の大きさを判定する番号標識判定手段と、
該番号標識判定手段で判定した番号標識の大きさ及び前記分類番号検出手段で検出した分類番号に基づいて、特種用途の普通自動車又は特種用途の小型自動車のいずれかを判定する特種用途自動車判定手段と
を備えることを特徴とする請求項2乃至請求項11のいずれか1項に記載の車色判定装置。
【請求項13】
コンピュータに、撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定するステップを実行させるためのコンピュータプログラムにおいて、
コンピュータに、
撮像画像に基づいて車両の番号標識上の分類番号を検出するステップと、
検出した分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定するステップと、
特定した車色判定領域の各画素の色成分に基づいて車両の色を判定するステップと
を実行させることを特徴とするコンピュータプログラム。
【請求項14】
撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定する車色判定装置による車色判定方法において、
撮像画像に基づいて車両の番号標識上の分類番号を検出するステップと、
検出された分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定するステップと、
特定された車色判定領域の各画素の色成分に基づいて車両の色を判定するステップと
を含むことを特徴とする車色判定方法。
【請求項1】
撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定する車色判定装置において、
撮像画像に基づいて車両の番号標識上の分類番号を検出する分類番号検出手段と、
該分類番号検出手段で検出した分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定する車色判定領域特定手段と、
該車色判定領域特定手段で特定した車色判定領域の各画素の色成分に基づいて車両の色を判定する車色判定手段と
を備えることを特徴とする車色判定装置。
【請求項2】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある矩形状の領域であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定するように構成してあることを特徴とする請求項1に記載の車色判定装置。
【請求項3】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が人の運送用の小型自動車、所定の乗車定員以下の普通自動車又は特種用途の小型自動車である場合、縦長の矩形状の領域を車色判定領域として特定するように構成してあることを特徴とする請求項2に記載の車色判定装置。
【請求項4】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が貨物の運送用の小型自動車である場合、横長の矩形状の領域を車色判定領域として特定するように構成してあることを特徴とする請求項2に記載の車色判定装置。
【請求項5】
前記所定の角度は、前記撮像画像上の横軸と道路の延伸方向とのなす角度であることを特徴とする請求項2乃至請求項4のいずれか1項に記載の車色判定装置。
【請求項6】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が小型自動車又は所定の乗車定員以下の普通自動車に対応する場合、前記撮像画像上で前記番号標識から道路の延伸方向に沿った位置に車色判定領域を特定するように構成してあることを特徴とする請求項2乃至請求項5のいずれか1項に記載の車色判定装置。
【請求項7】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が貨物の運送用の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある略矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなし、該略矩形状の下側中央を凹状に切り抜いた領域を車色判定領域として特定するように構成してあることを特徴とする請求項1に記載の車色判定装置。
【請求項8】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が所定の乗車定員以上の普通自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置にある略矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなし、該略矩形状の下側中央に凸状の領域を有する領域を車色判定領域として特定するように構成してあることを特徴とする請求項1に記載の車色判定装置。
【請求項9】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が特種用途の普通自動車又は大型特殊自動車に対応する場合、前記撮像画像上で前記番号標識の上方位置を間にして適長離隔した2つの矩形状であって、該矩形状の縦方向の辺が前記撮像画像上の横軸に対して所定の角度をなす領域を車色判定領域として特定するように構成してあることを特徴とする請求項1に記載の車色判定装置。
【請求項10】
前記所定の角度は、前記撮像画像上の横軸方向に対して80°から100°であることを特徴とする請求項7乃至請求項9のいずれか1項に記載の車色判定装置。
【請求項11】
前記車色判定領域特定手段は、
前記分類番号検出手段で検出した分類番号が貨物の運送用の普通自動車、所定の乗車定員以上の普通自動車、特種用途の普通自動車又は大型特殊自動車に対応する場合、前記番号標識から前記撮像画像上の横軸方向に対して80°から100°の角度をなす方向に沿った位置に車色判定領域を特定するように構成してあることを特徴とする請求項7乃至請求項10のいずれか1項に記載の車色判定装置。
【請求項12】
車両の番号標識の大きさを判定する番号標識判定手段と、
該番号標識判定手段で判定した番号標識の大きさ及び前記分類番号検出手段で検出した分類番号に基づいて、特種用途の普通自動車又は特種用途の小型自動車のいずれかを判定する特種用途自動車判定手段と
を備えることを特徴とする請求項2乃至請求項11のいずれか1項に記載の車色判定装置。
【請求項13】
コンピュータに、撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定するステップを実行させるためのコンピュータプログラムにおいて、
コンピュータに、
撮像画像に基づいて車両の番号標識上の分類番号を検出するステップと、
検出した分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定するステップと、
特定した車色判定領域の各画素の色成分に基づいて車両の色を判定するステップと
を実行させることを特徴とするコンピュータプログラム。
【請求項14】
撮像部で道路を走行する車両を撮像して得られた撮像画像に基づいて車両の色を判定する車色判定装置による車色判定方法において、
撮像画像に基づいて車両の番号標識上の分類番号を検出するステップと、
検出された分類番号に基づいて、前記撮像画像上の車色判定領域の形状及び前記番号標識に対する位置を特定するステップと、
特定された車色判定領域の各画素の色成分に基づいて車両の色を判定するステップと
を含むことを特徴とする車色判定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2012−128669(P2012−128669A)
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願番号】特願2010−279622(P2010−279622)
【出願日】平成22年12月15日(2010.12.15)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
【公開日】平成24年7月5日(2012.7.5)
【国際特許分類】
【出願日】平成22年12月15日(2010.12.15)
【出願人】(000002130)住友電気工業株式会社 (12,747)
【Fターム(参考)】
[ Back to top ]