
車車間通信システムおよび車車間通信方法
【課題】車車間通信において効率の良い通信が行えるように中継車両を決定する技術を提供する。
【解決手段】本発明に係る車車間通信システムでは、データを受信する受信車両の車種情報に基づいて、複数の受信車両のうちからデータを中継する中継車両として機能する車両が決定される。中継車両として機能する車両は、送信車両が決定しても良いし、受信車両が自立的に決定しても良い。また、各車両が互いに自車の車種情報を通知することで、自車周囲の車両についての車種情報を取得し、受信車両は、自車周囲の車両の車種情報に基づいて、自車が相対的に大型の車両であれば、受信したデータを中継するようにしても良い。
【解決手段】本発明に係る車車間通信システムでは、データを受信する受信車両の車種情報に基づいて、複数の受信車両のうちからデータを中継する中継車両として機能する車両が決定される。中継車両として機能する車両は、送信車両が決定しても良いし、受信車両が自立的に決定しても良い。また、各車両が互いに自車の車種情報を通知することで、自車周囲の車両についての車種情報を取得し、受信車両は、自車周囲の車両の車種情報に基づいて、自車が相対的に大型の車両であれば、受信したデータを中継するようにしても良い。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車車間通信システムに関し、特に車車間通信システムにおいてデータを中継する車両を決定する技術に関する。
【背景技術】
【0002】
近年、アドホック無線ネットワークという形態の無線通信システムが注目されている。アドホック無線ネットワークは、基地局や専用線といった基盤インフラに依存せずに、無線端末同士が一時的に構築する自律型無線ネットワークである。無線端末間で距離が離れている場合など直接通信ができない場合には、途中に存在する無線端末を中継することで情報を交換する。
【0003】
アドホック通信を実現するためには、効率よくデータを中継することが重要である。ネットワーク内の全ての通信端末に情報を送信する方法として、データ(情報)を受信した全ての通信端末がそのデータを再送信する方法がある。しかしながら、この方法では全ての通信端末が情報の再送信を行うため、通信帯域を消費し効率的ではない。
【0004】
効率的な中継端末を選択するために種々の手法が提案されている。OLSR(Optimized Link State Routing)プロトコルでは、各ノードが、2ホップ先までのネットワークトポロジーを把握し、自ノードからの情報を中継するノードの数が最小となるように中継ノード(MPR:Multi Point Relay)を選択する。自ノードを中継ノードとして選択して
いる送信ノードからデータを受信したノードは、受信したデータを中継する。このようにして効率の良い中継を実現している。
【0005】
しかしながら、車車間通信では、車両は高速に移動しその位置関係が頻繁に変わるという特徴がある。車車間通信において、上記のような方法で中継ノードを決定したとしても、車両の移動によって位置関係が変わり、電波が到達しなくなってしまう可能性がある。このように、中継ノードとして選択したノード(車両)が短時間の間で中継ノードとして利用できなくなってしまうため、頻繁に中継ノードを決定する処理を行う必要が生じ効率が悪い。
【0006】
また、車車間通信に関する技術として、次のような技術が知られている。特許文献1には、直接通信できる車両のうち、道路ごとに最も遠くに位置する車両を中継車両として送信車両が指定して、情報を送信する技術が開示されている。特許文献2,3には、車両の走行情報(方向、速さ、位置(経度、緯度、高さ))に基づいて、通信相手を決定する技術が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−12522号公報
【特許文献2】特開2004−274414号公報
【特許文献3】特開2004−199348号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明の目的は、車車間通信において効率の良い通信が行えるように中継車両を決定する技術を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために本発明では、以下の手段または処理によって車車間通信を行う。
【0010】
本発明に係る車車間通信システムは、1または複数の車両がデータを中継(再送)することによって車両間で通信を行う、いわゆるアドホックネットワークを形成する。本車車間通信システムでは、情報伝達の際に中継を行う中継車両を、容易にかつ効率的な通信が実現できるように選択する。
【0011】
中継車両は、データを受信した複数の受信車両のうちから、送信車両の速度と受信車両の速度との差に基づいて選択されることが好ましい。速度は大きさと向きを有するベクトル量であるため、中継車両の選択は速度ベクトルの差に基づいて決定されることが好ましい。この場合、速度ベクトルの差の大きさが所定の閾値以下となる車両が中継車両として決定されることがさらに好ましい。
【0012】
また、中継車両は、データを受信した複数の受信車両のうちから、本車車間通信システムを構成する複数の車両の平均速度と、データの受信車両の速度の差に基づいて選択されることが好ましい。この場合、複数の車両から構成されるグループの平均速度との差が所定の閾値以下の車両が中継車両として選択されることが好ましい。なお、複数の車両から構成されるグループはどのように決定されても構わない。例えば、各車両から所定のホップ数以内で通信できる車両をグループとしても良い。また、同一方面の行き先を有する車両をグループとしても良い。その他どのような方法によってグループを生成しても構わない。
【0013】
上記のように受信車両と送信車両あるいはグループとの速度の差に基づいて中継車両を決定することにより、中継車両は送信車両あるいはグループとの位置関係が維持されるため、一旦選択した中継車両はある程度の期間中継車両として機能することができる。したがって、頻繁に中継車両を決定する必要がなくなり、中継車両を決定するための通信や処理を抑制することができる。
【0014】
なお、車両の速度は送信時または受信時の一時点の速度である必要はなく、送信または受信までの所定の期間の速度の平均を用いても良い。
【0015】
また、中継車両は、データを受信した複数の受信車両のうちから、受信車両の位置情報に基づいて決定されることも好ましい。この場合、中継車両は、交差点やT字路などの複数の道路が交差する場所に位置する車両として選択されることがさらに好ましい。道路上における電波の到達範囲は、道路の脇に設置されている障害物(建物など)による影響を受けるため、車両が走行中の道路方向に広いが、それ以外の方向には狭くなる。このため自車が走行中の道路と交差する道路上の車両までは電波が届かないことが多い。交差点に位置する車両がデータを中継することで、データの送信車両が走行中の道路と交差する道路上の車両まで電波が到達し、したがって、データが到達する範囲を広くすることができる。
【0016】
なお、車両の位置情報は、GPS衛星信号と地図情報とによって取得することもできる。地図情報には、データを中継すべき領域が記憶されており、自車がこの領域内にいるときにデータを受信した場合には、受信データを中継することが好ましい。また、路側に設置された通信装置(基点ビーコン)からデータを中継すべき領域へ進入したことを通知されることも好ましい。
【0017】
また、中継車両は、データを受信する車両の車種に基づいて決定されることも好ましい
。具体的には、大型の車両であるほど中継車両として選択されることが好ましい。大型車に隠れた車両にはシャドーイングによって電波が到達しない可能性があるため、大型車が中継することでデータを受信できない車両の発生を抑制することが可能となる。
【0018】
上記したどの受信車両が中継車両として機能するかの決定は、データを送信する車両が決定しても良く、データを受信した車両が自律的に決定しても良い。
【0019】
例えば、送信車両は、あらかじめ車速や位置、車種に関する情報を他の車両から取得しておき、上記のような基準にしたがって中継車両として機能する車両を決定できる。この場合、送信するデータの中にどの車両が中継を行うかという情報を格納してデータを送信しても良く、あらかじめ自車からのデータを中継する中継車両を決定しておき、中継車両にはその旨を通知しておいても良い。データを受信した車両は、データ内部に格納された中継車両を判断することで、または、データの送信車両が自車を中継車両として選択しているか否かを判断することで、受信したデータを中継するか否か判断することができる。
【0020】
また、受信車両のうちどの車両が中継車両として機能するかは、受信車両が自律的に決定しても良い。受信車両が自律的に決定するとは、送信車両はどの車両が中継するべきか指定することなく、受信車両で個別に中継をするか否か決定することである。このように、受信車両がそれぞれ独自に中継するか否か判断するにも拘わらず、以下のような判断手法を用いることでシステム全体として効率的な中継車両を決定することができる。たとえば、送信車両との速度差に基づいて中継車両が決定される場合は、送信車両は自車の速度をデータに格納して送信し、このデータを受信した車両はデータに格納された送信車両の速度と自車の速度を比較して、その差が所定値以下であれば中継を行う。グループとの相対速度に基づいて中継車両が決定される場合には、グループ内の車両が速度を周囲の車両に通知することでグループに属する車両の平均速度を算出し、受信車両はデータの受信時に自車の速度とこの平均速度との差が所定の閾値以下であれば中継を行う。また、車両の位置情報に基づいて中継車両を決定する場合には、データ受信時の自車の位置が、所定の範囲(例えば交差点内など)に位置する場合には、受信したデータの中継を行う。また、車種に基づいて中継車両を決定する場合には、あらかじめ各車両が自車の車種を周囲の車両に通知し、各車両が周囲の車両の車種を取得する。データを受信した車両は、周囲の車両と比較して相対的に自車の車種が大型であると判断された場合には、受信したデータの中継を行う。
【0021】
このように受信車両側でデータを中継するか否か判断することで、送信車両側であらかじめ中継車両を決定しておく処理を省くことができるため、効率的に中継車両を決定することができる。
【0022】
また、送信車両と受信車両の速度差、グループ内の車両の平均速度と受信車両の速度の差、位置情報、または車種のいずれか1つのみに基づいて中継車両を決定する必要はなく、これらの任意の組み合わせに基づいて中継車両を決定しても良い。その場合、要素ごとに中継すべき度合いをスコア化しその合計値に基づいて中継車両を決定しても良く、ある要素が上記で説明した条件を満たす車両を中継車両として決定しても良い。
【0023】
なお、本発明は、上記処理の少なくとも一部を有する車車間通信装置として捉えることができる。また、本発明は、上記処理の少なくとも一部を含む車車間通信方法、または、かかる方法を実現するためのプログラムとして捉えることもできる。上記手段および処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0024】
本発明によれば、車車間通信において効率の良い通信が行えるように中継車両を決定す
ることが可能となる。
【図面の簡単な説明】
【0025】
【図1】第1の実施形態に係る車車間通信システムの概要を示す図である。
【図2】第1の実施形態におけるデータパケットの構造の例を示す図である。
【図3】第1の実施形態における通信処理の流れを示すフローチャートである。
【図4】第2の実施形態のおける車速通知パケットの構造の例を示す図である。
【図5】第2の実施形態におけるデータパケットの構造の例を示す図である。
【図6】第2の実施形態における通信処理の流れを示すフローチャートである。
【図7】第3の実施形態に係る車車間通信システムの概要を示す図である。
【図8】第3の実施形態における通信処理の流れを示すフローチャートである。
【図9】第4の実施形態に係る車車間通信システムの概要を示す図である。
【図10】第4の実施形態における通信処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0026】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0027】
(第1の実施形態)
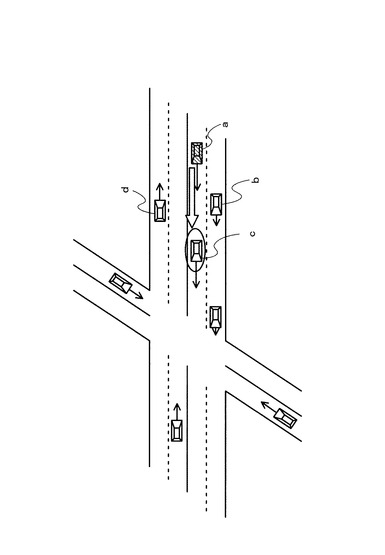
本発明の第1の実施形態は、送信車両との相対速度に基づいて中継ノードを決定する車車間通信システムである。図1は、本実施形態に係る車車間通信システムの概要を示す図である。各車両は安全や走行支援に関する種々の情報を車両間で交換している。たとえば、自車が急ブレーキを踏んだという情報や、信号機の情報、事故や障害物の通知、渋滞に関する情報などを車両間で送信している。図1において、車両aがデータの送信を行う。送信車両aからのデータは周囲の車両b〜dによって受信される。ここで、車両b〜dのうち送信車両aとの相対速度が小さい車両cが中継車両となるように、本実施形態に係る車車間通信システムでは決定する。以下、詳しく説明する。
【0028】
本実施形態において、各車両は無線通信を行うための無線通信装置を搭載している。この無線通信装置には、ナビゲーション装置のように車両に固定されているものや、ノートパソコンや携帯電話機のように持ち運び可能なものであって車両内に持ち込まれて使用するものも含む。
【0029】
無線通信装置は、ハードウェア構成としては、バスを介して接続されたCPU(中央演算処理装置)、主記憶装置(RAM)、補助記憶装置(ROM)、通信インタフェースなどを備えるように構成される。無線通信装置は、補助記憶装置に格納された各種のプログラムが主記憶装置にロードされCPUによって実行されることによって、以下の処理が実行される。なお、無線通信装置の一部または全部の機能は、専用のチップによって構成されても良い。
【0030】
次に、本車車間通信システムにおいて使用される無線通信方式について説明する。本実施形態においては、IEEE802.11bで規定される無線LANを採用する。ただし、IEEE802.11a/gなどの他の規格の無線LANや、IEEE802.16,IEEE802.20やDSRC(Dedicated Short Range Communication:専用狭域通
信)、Bluetooth(登録商標)など、他のどのような無線通信方式を採用しても良い。
【0031】
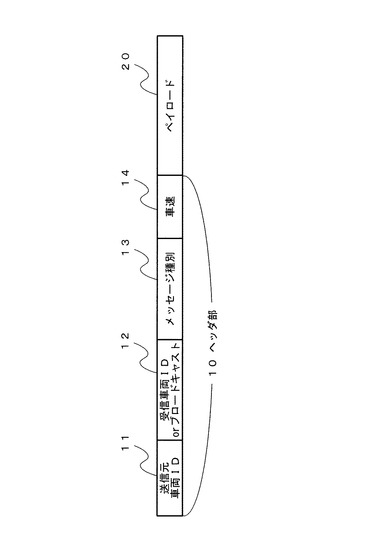
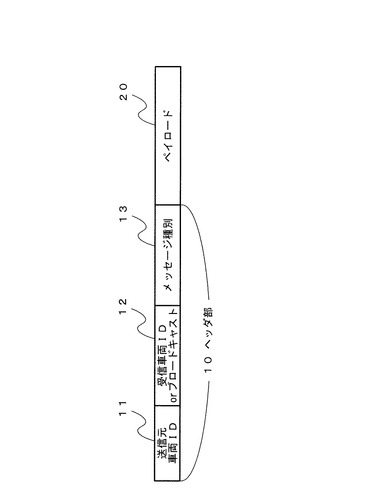
次に、本車車間通信システムにおいて用いられるデータパケットのパケット構造を説明する。図2は、データパケットの構造の例を示す図である。データパケットは、ヘッダ部10とペイロード20とから構成される。ヘッダ部10は、さらに、送信元車両ID11,受信車両ID12,メッセージ種別13,車速14から構成される。受信車両ID12
には、ユニキャストである場合には受信車両のIDが、ブロードキャストである場合にはブロードキャストであることを示す値(ブロードキャストアドレス)が格納される。本実施形態では、ブロードキャスト送信を考えるので、受信車両ID12にはブロードキャストアドレスが格納される。車速14には、送信車両の車速が格納される。なお、車速は向きと大きさとを持ったベクトル量としてパケットに格納される。
【0032】
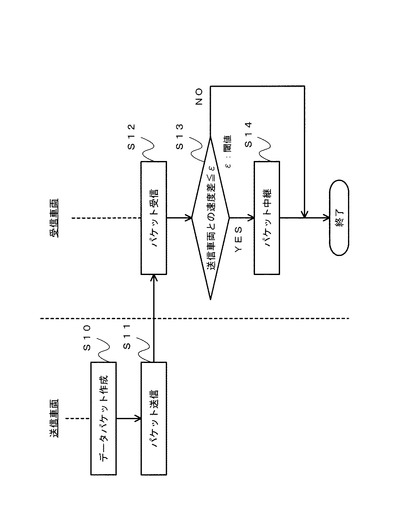
続いて、通信処理の流れについて図3のフローチャートを参照して説明する。図3は、通信時の送信車両および受信車両(中継車両)の処理の流れを示すフローチャートである。まず、データを送信する送信車両は、車速14に自車の送信時の車速を格納し、他のヘッダ部にも適宜情報を格納してパケットを作成する(S10)。なお、車速14に格納される車速は、送信時における車速である必要はなく、送信時までの所定期間における平均速度を格納するようにしても良い。送信車両は、このようにして作成したパケットを送信する(S11)。
【0033】
送信車両が送信したパケットは周囲の車両によって受信される(S12)。受信車両は、受信したパケットから送信車両の車速を取得する。そして、受信車両は、送信車両と受信車両の相対速度を算出する。なお、受信車両の速度として、受信時の車速を用いても良く、受信時までの所定の期間の平均速度を用いても良い。受信車両は、送信車両との相対速度の大きさ(速度ベクトルの差の大きさ)が所定の閾値以下であるか判定する(S13)。所定の閾値以下であると判定された場合(S13−YES)は、受信したパケットの中継を行う(S14)。パケット中継の際には、パケットヘッダの車速14を変更せず中継しても良く、自車の車速に書き換えて中継しても良い。送信車両との相対速度の大きさが所定の閾値よりも大きいと判定された場合(S13−NO)は、中継を行わず処理を終了する。
【0034】
このように、本実施形態においては、送信車両と相対速度が近い受信車両がパケットの中継を行うことで、効率的な通信を実現できる。また、送信車両は自車の速度をパケットに格納して送信するだけであり、受信車両側で自律的に自車の車速と比較して中継するか否かを判定しているため、簡単な処理によって本実施形態に係る車車間通信を実現できる。
【0035】
(第2の実施形態)
本発明の第2の実施形態は、グループ内の車両の平均速度との差が小さい受信車両が受信したパケットを中継する車車間通信システムである。第2の実施形態は、基本的に第1の実施形態と同様であるため、異なる部分についてのみ説明する。
【0036】
本実施形態においては、各車両は自車の車速を周囲の車両に通知する。このように、車速を通知し合うことで、各車両は自車の周囲に存在する車両の車速を取得することができる。
【0037】
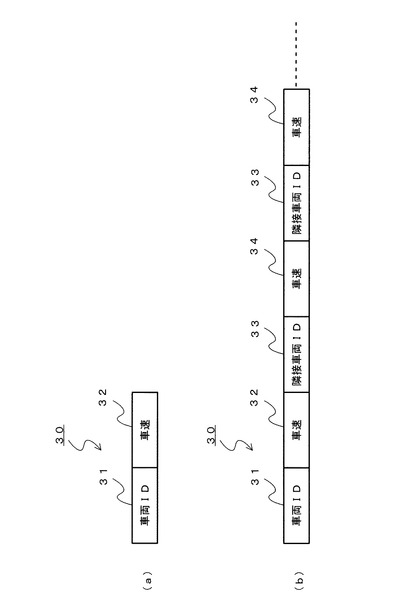
図4は、車速を通知する車速通知パケット30のパケット構造の例を示す図である。図4(a)は、車両ID31と車速32から構成される例である。このような車速通知パケット30を周囲の車両に通知することで、各車両は自車の周囲に存在する車両であって直接通信可能な車両の車速を取得することができる。また、図4(b)のように、さらに、自車が既に取得した自車周囲の車両の車速を、隣接車両ID33と車速34に格納して同時に通知することで、各車両は自車の周囲に存在する車両であって直接または1ホップの中継で通信可能な車両の車両を取得することができる。
【0038】
図5は、送信車両が送信するデータパケットの構造の例を示す図である。第1の実施形態との違いは、本実施形態では車速14を利用しない点である。本実施形態では、受信車
両はグループ内の車両の平均速度と、自車の速度との差に基づいて中継するか否かを判定するため、送信車両の速度をパケットに格納して送信する必要がない。
【0039】
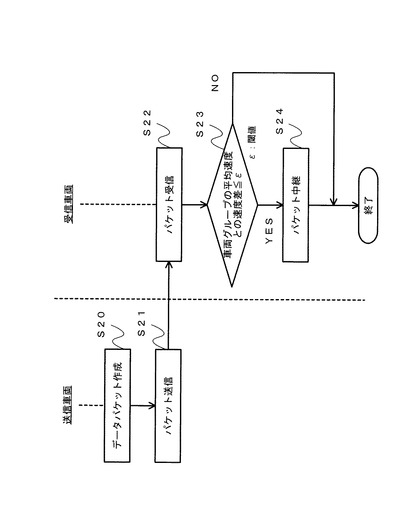
次に、通信処理の流れを図6のフローチャートを参照して説明する。図6は、本実施形態における、通信時の送信車両および受信車両(中継車両)の処理の流れを示すフローチャートである。まず、データを送信する車両は送信するパケットを作成し(S20)、送信する(S21)。このパケットを受信(S22)した受信車両は、自車周囲に存在する車両グループの平均速度と自車の速度の差が所定の閾値以下であるか判定する(S23)。自車の周囲に存在する車両グループの平均速度は、前述した車速通知パケットによって取得される自車周囲の車両の速度の平均として算出できる。なお、自車周囲の車両グループは、自車と直接通信可能な車両から構成されるもの(すなわち、図4(a)の速度通知パケットによって速度が取得可能な車両)であっても良く、自車と直接または1ホップの中継を介して通信可能な車両から構成されるもの(すなわち、図4(b)の速度通知パケットによって速度が取得可能な車両)であっても良い。車両グループの平均速度に近いと判定された場合(S23−YES)は、受信したパケットを中継し(S24)、車両グループの平均速度との差が大きいと判定された場合(S23−NO)は中継せずに処理を終了する。
【0040】
このように、車両グループの平均速度との速度差が小さい受信車両が中継を行うことで、周囲の車両と近い速度で走行中の車両が中継することになる。相対速度が小さい車両間での通信は安定するため効率的な通信が実現される。
【0041】
なお、本実施形態では、車両のグループを直接あるいは1ホップの中継を介して通信可能な車両のグループとしたが、他の方法によって車両グループを定めても良い。たとえば、ナビゲーション装置に入力された行き先情報から行き先が同じ方面である車両を同一のグループとしても良い。また、たとえば、運転者(ユーザ)からの明示的な指示(どの車両とグループを形成するかという指示)にしたがって形成されるグループであっても良い。
【0042】
(第3の実施形態)
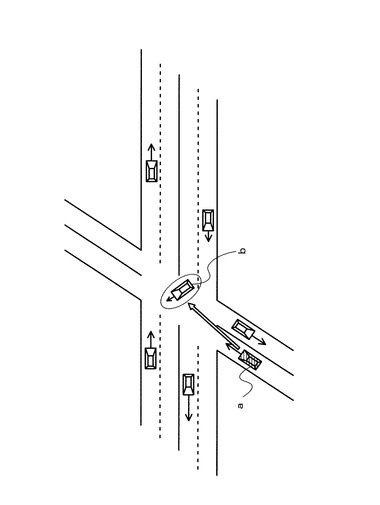
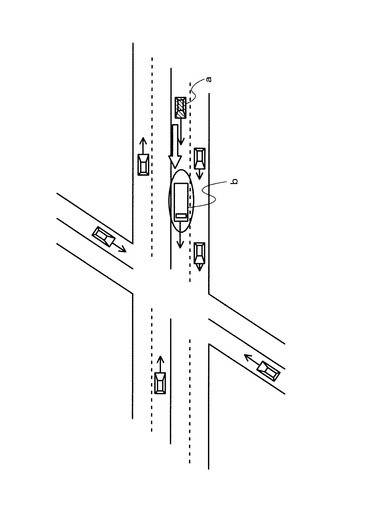
本発明の第3の実施形態は、受信時の道路上における位置に基づいて受信車両がパケットを中継するか否か判定する車車間通信システムである。図7は本実施形態のシステム概要を示す図である。図に示すように、送信車両aからのデータは、交差点内に位置する車両bによって中継される。第3の実施形態は、基本的に第1および第2の実施形態と同様であるため異なる部分についてのみ説明する。
【0043】
本実施形態における各車両は、道路上における位置情報を取得するために、位置情報取得手段としてGPS(Global Positioning System)装置および地図情報を格納した地図
情報格納部を有する。車両はGPS装置によって、自車の位置(緯度・経度・高さ)を取得し、取得した位置と地図情報を照合することで、自車の道路上における位置を取得する。
【0044】
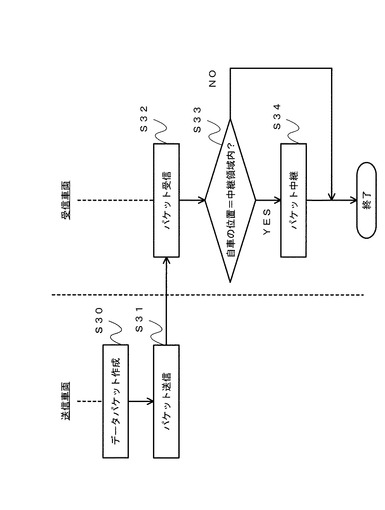
通信時の処理の流れを図8のフローチャートを参照して説明する。図8は、本実施形態における、通信時の送信車両および受信車両(中継車両)の処理の流れを示すフローチャートである。まず、データを送信する車両は送信するパケットを作成し(S30)、送信する(S31)。このパケットを受信(S32)した受信車両は、自車の位置が中継すべき領域(以下、中継領域という)内であるか判定する(S33)。中継領域は、交差点やT字路などの複数の道路が交差する場所や、道路の曲がり角などである。このような領域は地図情報記憶部に地図情報と関連付けられる形で記憶されるように構成し、受信車両の位置がこの中継領域に該当するか判断しても良い。
【0045】
受信車両が所定の領域(中継領域)内に位置する場合(S33−YES)には受信したデータを中継し(S34)、所定の領域外に位置する場合(S33−NO)には中継せずに処理を終了する。
【0046】
このように、交差点内等の中継に適した場所に位置する受信車両がパケットの中継を行うことで効率的な通信を実現することができる。また、中継を行うか否かは受信車両が自律的に判断して行っているため、簡易な処理で中継車両の決定が行える。
【0047】
なお、中継領域内に位置するか否かの判定は、GPS装置と地図情報を用いる方法に限られるものではない。たとえば、道路脇に設置された基点ビーコンを用いて、道路上を走行中の車両に中継領域への進入を通知するように構成しても良い。基点ビーコンから送信される情報には、中継領域進入までの距離(進入したという情報でも良い)、中継領域に進入してから退出するまでの距離などが含まれる。すなわち、基点ビーコンは中継領域の範囲を通過車両に通知する。データパケットを受信した車両は、基点ビーコンによって自車が中継領域内に位置していることを検知している場合には、受信したパケットを中継する。
【0048】
(第4の実施形態)
本発明の第4の実施形態は、受信車両が自車の車種に基づいてパケットを中継するか否か判定する車車間通信システムである。図9は、本実施形態のシステム概要を示す図である。図に示すように、送信車両aからのデータは、大型車両である車両bによって中継される。第4の実施形態は、基本的に上記で説明した他の実施形態と同様であるため、異なる部分についてのみ説明する。
【0049】
本実施形態は、大型車両ほど、他の車両に対して遮蔽物となる可能性が高いこと、および、搭載されるアンテナの位置が高くなるため広範囲に電波が到達する可能性が高いことを理由に、大型車両ほど中継車両になりやすいように中継車両を決定する。まず、各車両に対して、車種に応じて中継車両となる確率に連動したスコア(以下、中継スコアという)を決定する。バスやトラックなどの大型の車両であるほど中継スコアが大きくなるように決定される。
【0050】
本実施形態では、各車両は、第2の実施形態で車速を交換したのと同様の方法により(図4参照)、自車の中継スコアを周囲の車両に通知する。これにより、各車両は自車の周囲の車両の中継スコアを取得することができる。
【0051】
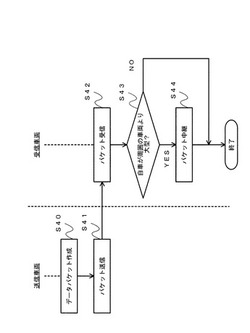
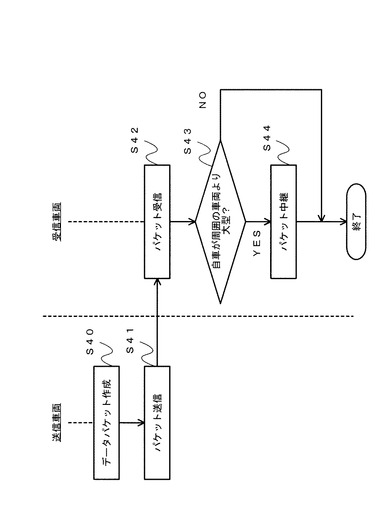
次に、通信時の処理の流れを図10のフローチャートを参照して説明する。図10は、本実施形態における、通信時の送信車両および受信車両(中継車両)の処理の流れを示すフローチャートである。まず、データを送信する車両は送信するパケットを作成し(S40)、送信する(S41)。このパケットを受信(S42)した受信車両は、自車の中継スコアが自車周囲の車両の中継スコアと比較して相対的に大きいか否か判定する(S43)。この判断は、たとえば、自車の周囲に中継スコアが自車の中継スコアよりも所定の閾値以上小さい車両が存在するか否かによって判定しても良いし、自車周囲の車両の中継スコアの平均や分散といった統計値に基づいて判定しても良い。自車の中継スコアが相対的に大きいと判定された場合(S43−YES)は受信したパケットを中継し(S44)、相対的に大きいと判定されなかった場合(S43−NO)は中継せずに処理を終了する。
【0052】
このように、受信車両の車種に基づいて、他の遮蔽物になる可能性が高く、かつ、電波到達範囲の広い車両が中継車両を中継車両として選択することでき、効率的な通信を実現できる。また、中継するか否かの判断は受信車両が自律的に判断しているため、簡易な方
法で中継車両を決定することができる。
【0053】
なお、上記では受信車両は中継スコアの相対的な大きさに基づいて、受信したパケットを中継するか否かを判定しているが、あらかじめ定められた所定の閾値に基づいて(すなわち絶対的な基準に従って)中継するか否かを判定しても良い。
【0054】
(第5の実施形態)
上記の実施形態では、送信車両の速度との速度差、グループ内の車両の平均速度との速度差、位置情報、車種を判断基準として、受信車両が受信したデータを中継するか否か判定していた。本実施形態では、これらの判断基準のうち複数の判断基準に従って、受信車両が受信したデータを中継するか否かを判定する。
【0055】
本実施形態では、受信車両は判断基準ごとに中継を行う度合いを示すスコアを算出する。たとえば、相対速度に基づいたスコア算出では、相対速度が小さいほど高いスコアとして算出し、相対速度が大きいほど低いスコアとして算出する。また、受信時の車両の位置が交差点等に近ければ高いスコアとして算出する。また、受信車両の車種が相対的に大型車両であるほど高いスコアとして算出する。受信車両は、個々の判断基準ごとに算出されたスコアを合計し、その合計値が所定の閾値以上であれば受信したデータを中継する。なお、スコアの合計は単純な和であっても良く、重み付けをした合計であっても良い。
【0056】
また、たとえば、上記それぞれの判断基準ごとに上記の実施形態で説明した中継するか否かの判定を行い、いずれか1つの判断基準で中継すると判定された場合には受信したデータを中継しても良い。
【0057】
このように、複数の基準に従って受信したデータを中継するか否か判定することで、より適切な車両を中継車両とすることが可能となる。
【0058】
(第6の実施形態)
上記の実施形態ではいずれも、中継車両の決定は、受信車両が自律的に受信データを中継するか否かを判断することによって決定されていた。しかしながら、中継車両の決定は、送信車両が行っても良い。本実施形態では、送信車両が、複数の受信車両のうちどの車両が中継車両として機能するかを決定する。送信車両は、あらかじめ、自車の周囲の車両について、速度や位置や車種に関する情報を取得する。そして、上述したような判断基準に基づいて、すなわち、自車との相対速度が小さい車両や、車両グループの平均速度との速度差が小さい車両や、中継領域に位置する車両や、相対的に大型な車種の車両を中継車両として選択する。
【0059】
送信車両は、このようにして選択した中継車両を送信するデータパケットのヘッダ部に格納してデータパケットを送信しても良い。この場合、データパケットを受信した車両は、ヘッダ部を確認して自車が中継車両として選択されている場合には受信したパケットの中継を行う。あるいは、各車両は、選択した中継車両をあらかじめ周囲の車両に通知しておいても良い。この場合は、データパケットを受信した車両は、このパケットが自車を中継車両として選択している車両からのパケットである場合には、このパケットを中継すると判断する。
【0060】
また、OLSRと同様の手法により、車両ごとに自車の車両を中継する車両をあらかじめ定めておいても良い。すなわち、各車両は、速度・位置情報・車種に応じて中継車両になる度合い(以下、中継度という)を決定し、周囲の車両に中継度通知パケットで通知する。中継度通知パケットは、OLSRにおけるHelloパケットに中継度を格納したものとして構成しても良い。また、中継度は各車両が決定してHelloパケットを用いて
送信するのではなく、各車両は自車の車速等をHelloパケットに格納して送信し、このパケットを受信した車両が自車の車速との差に基づいて、その車両の中継度を決定しても良い。
【0061】
なお、中継度通知パケットには、このパケットを送信する車両の周囲の車両についての中継度も格納されているので、各車両は2ホップ先の車両についての中継度およびネットワークトポロジーを取得することが可能である。各車両は、このようにして取得したネットワークトポロジーと中継度を参照して、2ホップ先の全ての車両までデータが送信されるように、かつ、中継車両の数が最小となるように中継車両を選択する。そして、選択した中継車両の集合を周囲の車両に通知することで、中継車両として選択された車両は、自車がどの車両に対する中継車両であるかを検知することができる。
【0062】
このように、各車両について中継車両を決定しておくことで、データ受信時には、受信車両がこのデータの送信元の車両の中継車両として選択されているか否かにしたがって、中継するか否かを決定することができる。
【符号の説明】
【0063】
a,b,c 車両
10 ヘッダ部
11 送信元車両ID
12 受信車両ID
13 メッセージ種別
14 車速
20 ペイロード
【技術分野】
【0001】
本発明は、車車間通信システムに関し、特に車車間通信システムにおいてデータを中継する車両を決定する技術に関する。
【背景技術】
【0002】
近年、アドホック無線ネットワークという形態の無線通信システムが注目されている。アドホック無線ネットワークは、基地局や専用線といった基盤インフラに依存せずに、無線端末同士が一時的に構築する自律型無線ネットワークである。無線端末間で距離が離れている場合など直接通信ができない場合には、途中に存在する無線端末を中継することで情報を交換する。
【0003】
アドホック通信を実現するためには、効率よくデータを中継することが重要である。ネットワーク内の全ての通信端末に情報を送信する方法として、データ(情報)を受信した全ての通信端末がそのデータを再送信する方法がある。しかしながら、この方法では全ての通信端末が情報の再送信を行うため、通信帯域を消費し効率的ではない。
【0004】
効率的な中継端末を選択するために種々の手法が提案されている。OLSR(Optimized Link State Routing)プロトコルでは、各ノードが、2ホップ先までのネットワークトポロジーを把握し、自ノードからの情報を中継するノードの数が最小となるように中継ノード(MPR:Multi Point Relay)を選択する。自ノードを中継ノードとして選択して
いる送信ノードからデータを受信したノードは、受信したデータを中継する。このようにして効率の良い中継を実現している。
【0005】
しかしながら、車車間通信では、車両は高速に移動しその位置関係が頻繁に変わるという特徴がある。車車間通信において、上記のような方法で中継ノードを決定したとしても、車両の移動によって位置関係が変わり、電波が到達しなくなってしまう可能性がある。このように、中継ノードとして選択したノード(車両)が短時間の間で中継ノードとして利用できなくなってしまうため、頻繁に中継ノードを決定する処理を行う必要が生じ効率が悪い。
【0006】
また、車車間通信に関する技術として、次のような技術が知られている。特許文献1には、直接通信できる車両のうち、道路ごとに最も遠くに位置する車両を中継車両として送信車両が指定して、情報を送信する技術が開示されている。特許文献2,3には、車両の走行情報(方向、速さ、位置(経度、緯度、高さ))に基づいて、通信相手を決定する技術が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2005−12522号公報
【特許文献2】特開2004−274414号公報
【特許文献3】特開2004−199348号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明の目的は、車車間通信において効率の良い通信が行えるように中継車両を決定する技術を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために本発明では、以下の手段または処理によって車車間通信を行う。
【0010】
本発明に係る車車間通信システムは、1または複数の車両がデータを中継(再送)することによって車両間で通信を行う、いわゆるアドホックネットワークを形成する。本車車間通信システムでは、情報伝達の際に中継を行う中継車両を、容易にかつ効率的な通信が実現できるように選択する。
【0011】
中継車両は、データを受信した複数の受信車両のうちから、送信車両の速度と受信車両の速度との差に基づいて選択されることが好ましい。速度は大きさと向きを有するベクトル量であるため、中継車両の選択は速度ベクトルの差に基づいて決定されることが好ましい。この場合、速度ベクトルの差の大きさが所定の閾値以下となる車両が中継車両として決定されることがさらに好ましい。
【0012】
また、中継車両は、データを受信した複数の受信車両のうちから、本車車間通信システムを構成する複数の車両の平均速度と、データの受信車両の速度の差に基づいて選択されることが好ましい。この場合、複数の車両から構成されるグループの平均速度との差が所定の閾値以下の車両が中継車両として選択されることが好ましい。なお、複数の車両から構成されるグループはどのように決定されても構わない。例えば、各車両から所定のホップ数以内で通信できる車両をグループとしても良い。また、同一方面の行き先を有する車両をグループとしても良い。その他どのような方法によってグループを生成しても構わない。
【0013】
上記のように受信車両と送信車両あるいはグループとの速度の差に基づいて中継車両を決定することにより、中継車両は送信車両あるいはグループとの位置関係が維持されるため、一旦選択した中継車両はある程度の期間中継車両として機能することができる。したがって、頻繁に中継車両を決定する必要がなくなり、中継車両を決定するための通信や処理を抑制することができる。
【0014】
なお、車両の速度は送信時または受信時の一時点の速度である必要はなく、送信または受信までの所定の期間の速度の平均を用いても良い。
【0015】
また、中継車両は、データを受信した複数の受信車両のうちから、受信車両の位置情報に基づいて決定されることも好ましい。この場合、中継車両は、交差点やT字路などの複数の道路が交差する場所に位置する車両として選択されることがさらに好ましい。道路上における電波の到達範囲は、道路の脇に設置されている障害物(建物など)による影響を受けるため、車両が走行中の道路方向に広いが、それ以外の方向には狭くなる。このため自車が走行中の道路と交差する道路上の車両までは電波が届かないことが多い。交差点に位置する車両がデータを中継することで、データの送信車両が走行中の道路と交差する道路上の車両まで電波が到達し、したがって、データが到達する範囲を広くすることができる。
【0016】
なお、車両の位置情報は、GPS衛星信号と地図情報とによって取得することもできる。地図情報には、データを中継すべき領域が記憶されており、自車がこの領域内にいるときにデータを受信した場合には、受信データを中継することが好ましい。また、路側に設置された通信装置(基点ビーコン)からデータを中継すべき領域へ進入したことを通知されることも好ましい。
【0017】
また、中継車両は、データを受信する車両の車種に基づいて決定されることも好ましい
。具体的には、大型の車両であるほど中継車両として選択されることが好ましい。大型車に隠れた車両にはシャドーイングによって電波が到達しない可能性があるため、大型車が中継することでデータを受信できない車両の発生を抑制することが可能となる。
【0018】
上記したどの受信車両が中継車両として機能するかの決定は、データを送信する車両が決定しても良く、データを受信した車両が自律的に決定しても良い。
【0019】
例えば、送信車両は、あらかじめ車速や位置、車種に関する情報を他の車両から取得しておき、上記のような基準にしたがって中継車両として機能する車両を決定できる。この場合、送信するデータの中にどの車両が中継を行うかという情報を格納してデータを送信しても良く、あらかじめ自車からのデータを中継する中継車両を決定しておき、中継車両にはその旨を通知しておいても良い。データを受信した車両は、データ内部に格納された中継車両を判断することで、または、データの送信車両が自車を中継車両として選択しているか否かを判断することで、受信したデータを中継するか否か判断することができる。
【0020】
また、受信車両のうちどの車両が中継車両として機能するかは、受信車両が自律的に決定しても良い。受信車両が自律的に決定するとは、送信車両はどの車両が中継するべきか指定することなく、受信車両で個別に中継をするか否か決定することである。このように、受信車両がそれぞれ独自に中継するか否か判断するにも拘わらず、以下のような判断手法を用いることでシステム全体として効率的な中継車両を決定することができる。たとえば、送信車両との速度差に基づいて中継車両が決定される場合は、送信車両は自車の速度をデータに格納して送信し、このデータを受信した車両はデータに格納された送信車両の速度と自車の速度を比較して、その差が所定値以下であれば中継を行う。グループとの相対速度に基づいて中継車両が決定される場合には、グループ内の車両が速度を周囲の車両に通知することでグループに属する車両の平均速度を算出し、受信車両はデータの受信時に自車の速度とこの平均速度との差が所定の閾値以下であれば中継を行う。また、車両の位置情報に基づいて中継車両を決定する場合には、データ受信時の自車の位置が、所定の範囲(例えば交差点内など)に位置する場合には、受信したデータの中継を行う。また、車種に基づいて中継車両を決定する場合には、あらかじめ各車両が自車の車種を周囲の車両に通知し、各車両が周囲の車両の車種を取得する。データを受信した車両は、周囲の車両と比較して相対的に自車の車種が大型であると判断された場合には、受信したデータの中継を行う。
【0021】
このように受信車両側でデータを中継するか否か判断することで、送信車両側であらかじめ中継車両を決定しておく処理を省くことができるため、効率的に中継車両を決定することができる。
【0022】
また、送信車両と受信車両の速度差、グループ内の車両の平均速度と受信車両の速度の差、位置情報、または車種のいずれか1つのみに基づいて中継車両を決定する必要はなく、これらの任意の組み合わせに基づいて中継車両を決定しても良い。その場合、要素ごとに中継すべき度合いをスコア化しその合計値に基づいて中継車両を決定しても良く、ある要素が上記で説明した条件を満たす車両を中継車両として決定しても良い。
【0023】
なお、本発明は、上記処理の少なくとも一部を有する車車間通信装置として捉えることができる。また、本発明は、上記処理の少なくとも一部を含む車車間通信方法、または、かかる方法を実現するためのプログラムとして捉えることもできる。上記手段および処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【発明の効果】
【0024】
本発明によれば、車車間通信において効率の良い通信が行えるように中継車両を決定す
ることが可能となる。
【図面の簡単な説明】
【0025】
【図1】第1の実施形態に係る車車間通信システムの概要を示す図である。
【図2】第1の実施形態におけるデータパケットの構造の例を示す図である。
【図3】第1の実施形態における通信処理の流れを示すフローチャートである。
【図4】第2の実施形態のおける車速通知パケットの構造の例を示す図である。
【図5】第2の実施形態におけるデータパケットの構造の例を示す図である。
【図6】第2の実施形態における通信処理の流れを示すフローチャートである。
【図7】第3の実施形態に係る車車間通信システムの概要を示す図である。
【図8】第3の実施形態における通信処理の流れを示すフローチャートである。
【図9】第4の実施形態に係る車車間通信システムの概要を示す図である。
【図10】第4の実施形態における通信処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0026】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0027】
(第1の実施形態)
本発明の第1の実施形態は、送信車両との相対速度に基づいて中継ノードを決定する車車間通信システムである。図1は、本実施形態に係る車車間通信システムの概要を示す図である。各車両は安全や走行支援に関する種々の情報を車両間で交換している。たとえば、自車が急ブレーキを踏んだという情報や、信号機の情報、事故や障害物の通知、渋滞に関する情報などを車両間で送信している。図1において、車両aがデータの送信を行う。送信車両aからのデータは周囲の車両b〜dによって受信される。ここで、車両b〜dのうち送信車両aとの相対速度が小さい車両cが中継車両となるように、本実施形態に係る車車間通信システムでは決定する。以下、詳しく説明する。
【0028】
本実施形態において、各車両は無線通信を行うための無線通信装置を搭載している。この無線通信装置には、ナビゲーション装置のように車両に固定されているものや、ノートパソコンや携帯電話機のように持ち運び可能なものであって車両内に持ち込まれて使用するものも含む。
【0029】
無線通信装置は、ハードウェア構成としては、バスを介して接続されたCPU(中央演算処理装置)、主記憶装置(RAM)、補助記憶装置(ROM)、通信インタフェースなどを備えるように構成される。無線通信装置は、補助記憶装置に格納された各種のプログラムが主記憶装置にロードされCPUによって実行されることによって、以下の処理が実行される。なお、無線通信装置の一部または全部の機能は、専用のチップによって構成されても良い。
【0030】
次に、本車車間通信システムにおいて使用される無線通信方式について説明する。本実施形態においては、IEEE802.11bで規定される無線LANを採用する。ただし、IEEE802.11a/gなどの他の規格の無線LANや、IEEE802.16,IEEE802.20やDSRC(Dedicated Short Range Communication:専用狭域通
信)、Bluetooth(登録商標)など、他のどのような無線通信方式を採用しても良い。
【0031】
次に、本車車間通信システムにおいて用いられるデータパケットのパケット構造を説明する。図2は、データパケットの構造の例を示す図である。データパケットは、ヘッダ部10とペイロード20とから構成される。ヘッダ部10は、さらに、送信元車両ID11,受信車両ID12,メッセージ種別13,車速14から構成される。受信車両ID12
には、ユニキャストである場合には受信車両のIDが、ブロードキャストである場合にはブロードキャストであることを示す値(ブロードキャストアドレス)が格納される。本実施形態では、ブロードキャスト送信を考えるので、受信車両ID12にはブロードキャストアドレスが格納される。車速14には、送信車両の車速が格納される。なお、車速は向きと大きさとを持ったベクトル量としてパケットに格納される。
【0032】
続いて、通信処理の流れについて図3のフローチャートを参照して説明する。図3は、通信時の送信車両および受信車両(中継車両)の処理の流れを示すフローチャートである。まず、データを送信する送信車両は、車速14に自車の送信時の車速を格納し、他のヘッダ部にも適宜情報を格納してパケットを作成する(S10)。なお、車速14に格納される車速は、送信時における車速である必要はなく、送信時までの所定期間における平均速度を格納するようにしても良い。送信車両は、このようにして作成したパケットを送信する(S11)。
【0033】
送信車両が送信したパケットは周囲の車両によって受信される(S12)。受信車両は、受信したパケットから送信車両の車速を取得する。そして、受信車両は、送信車両と受信車両の相対速度を算出する。なお、受信車両の速度として、受信時の車速を用いても良く、受信時までの所定の期間の平均速度を用いても良い。受信車両は、送信車両との相対速度の大きさ(速度ベクトルの差の大きさ)が所定の閾値以下であるか判定する(S13)。所定の閾値以下であると判定された場合(S13−YES)は、受信したパケットの中継を行う(S14)。パケット中継の際には、パケットヘッダの車速14を変更せず中継しても良く、自車の車速に書き換えて中継しても良い。送信車両との相対速度の大きさが所定の閾値よりも大きいと判定された場合(S13−NO)は、中継を行わず処理を終了する。
【0034】
このように、本実施形態においては、送信車両と相対速度が近い受信車両がパケットの中継を行うことで、効率的な通信を実現できる。また、送信車両は自車の速度をパケットに格納して送信するだけであり、受信車両側で自律的に自車の車速と比較して中継するか否かを判定しているため、簡単な処理によって本実施形態に係る車車間通信を実現できる。
【0035】
(第2の実施形態)
本発明の第2の実施形態は、グループ内の車両の平均速度との差が小さい受信車両が受信したパケットを中継する車車間通信システムである。第2の実施形態は、基本的に第1の実施形態と同様であるため、異なる部分についてのみ説明する。
【0036】
本実施形態においては、各車両は自車の車速を周囲の車両に通知する。このように、車速を通知し合うことで、各車両は自車の周囲に存在する車両の車速を取得することができる。
【0037】
図4は、車速を通知する車速通知パケット30のパケット構造の例を示す図である。図4(a)は、車両ID31と車速32から構成される例である。このような車速通知パケット30を周囲の車両に通知することで、各車両は自車の周囲に存在する車両であって直接通信可能な車両の車速を取得することができる。また、図4(b)のように、さらに、自車が既に取得した自車周囲の車両の車速を、隣接車両ID33と車速34に格納して同時に通知することで、各車両は自車の周囲に存在する車両であって直接または1ホップの中継で通信可能な車両の車両を取得することができる。
【0038】
図5は、送信車両が送信するデータパケットの構造の例を示す図である。第1の実施形態との違いは、本実施形態では車速14を利用しない点である。本実施形態では、受信車
両はグループ内の車両の平均速度と、自車の速度との差に基づいて中継するか否かを判定するため、送信車両の速度をパケットに格納して送信する必要がない。
【0039】
次に、通信処理の流れを図6のフローチャートを参照して説明する。図6は、本実施形態における、通信時の送信車両および受信車両(中継車両)の処理の流れを示すフローチャートである。まず、データを送信する車両は送信するパケットを作成し(S20)、送信する(S21)。このパケットを受信(S22)した受信車両は、自車周囲に存在する車両グループの平均速度と自車の速度の差が所定の閾値以下であるか判定する(S23)。自車の周囲に存在する車両グループの平均速度は、前述した車速通知パケットによって取得される自車周囲の車両の速度の平均として算出できる。なお、自車周囲の車両グループは、自車と直接通信可能な車両から構成されるもの(すなわち、図4(a)の速度通知パケットによって速度が取得可能な車両)であっても良く、自車と直接または1ホップの中継を介して通信可能な車両から構成されるもの(すなわち、図4(b)の速度通知パケットによって速度が取得可能な車両)であっても良い。車両グループの平均速度に近いと判定された場合(S23−YES)は、受信したパケットを中継し(S24)、車両グループの平均速度との差が大きいと判定された場合(S23−NO)は中継せずに処理を終了する。
【0040】
このように、車両グループの平均速度との速度差が小さい受信車両が中継を行うことで、周囲の車両と近い速度で走行中の車両が中継することになる。相対速度が小さい車両間での通信は安定するため効率的な通信が実現される。
【0041】
なお、本実施形態では、車両のグループを直接あるいは1ホップの中継を介して通信可能な車両のグループとしたが、他の方法によって車両グループを定めても良い。たとえば、ナビゲーション装置に入力された行き先情報から行き先が同じ方面である車両を同一のグループとしても良い。また、たとえば、運転者(ユーザ)からの明示的な指示(どの車両とグループを形成するかという指示)にしたがって形成されるグループであっても良い。
【0042】
(第3の実施形態)
本発明の第3の実施形態は、受信時の道路上における位置に基づいて受信車両がパケットを中継するか否か判定する車車間通信システムである。図7は本実施形態のシステム概要を示す図である。図に示すように、送信車両aからのデータは、交差点内に位置する車両bによって中継される。第3の実施形態は、基本的に第1および第2の実施形態と同様であるため異なる部分についてのみ説明する。
【0043】
本実施形態における各車両は、道路上における位置情報を取得するために、位置情報取得手段としてGPS(Global Positioning System)装置および地図情報を格納した地図
情報格納部を有する。車両はGPS装置によって、自車の位置(緯度・経度・高さ)を取得し、取得した位置と地図情報を照合することで、自車の道路上における位置を取得する。
【0044】
通信時の処理の流れを図8のフローチャートを参照して説明する。図8は、本実施形態における、通信時の送信車両および受信車両(中継車両)の処理の流れを示すフローチャートである。まず、データを送信する車両は送信するパケットを作成し(S30)、送信する(S31)。このパケットを受信(S32)した受信車両は、自車の位置が中継すべき領域(以下、中継領域という)内であるか判定する(S33)。中継領域は、交差点やT字路などの複数の道路が交差する場所や、道路の曲がり角などである。このような領域は地図情報記憶部に地図情報と関連付けられる形で記憶されるように構成し、受信車両の位置がこの中継領域に該当するか判断しても良い。
【0045】
受信車両が所定の領域(中継領域)内に位置する場合(S33−YES)には受信したデータを中継し(S34)、所定の領域外に位置する場合(S33−NO)には中継せずに処理を終了する。
【0046】
このように、交差点内等の中継に適した場所に位置する受信車両がパケットの中継を行うことで効率的な通信を実現することができる。また、中継を行うか否かは受信車両が自律的に判断して行っているため、簡易な処理で中継車両の決定が行える。
【0047】
なお、中継領域内に位置するか否かの判定は、GPS装置と地図情報を用いる方法に限られるものではない。たとえば、道路脇に設置された基点ビーコンを用いて、道路上を走行中の車両に中継領域への進入を通知するように構成しても良い。基点ビーコンから送信される情報には、中継領域進入までの距離(進入したという情報でも良い)、中継領域に進入してから退出するまでの距離などが含まれる。すなわち、基点ビーコンは中継領域の範囲を通過車両に通知する。データパケットを受信した車両は、基点ビーコンによって自車が中継領域内に位置していることを検知している場合には、受信したパケットを中継する。
【0048】
(第4の実施形態)
本発明の第4の実施形態は、受信車両が自車の車種に基づいてパケットを中継するか否か判定する車車間通信システムである。図9は、本実施形態のシステム概要を示す図である。図に示すように、送信車両aからのデータは、大型車両である車両bによって中継される。第4の実施形態は、基本的に上記で説明した他の実施形態と同様であるため、異なる部分についてのみ説明する。
【0049】
本実施形態は、大型車両ほど、他の車両に対して遮蔽物となる可能性が高いこと、および、搭載されるアンテナの位置が高くなるため広範囲に電波が到達する可能性が高いことを理由に、大型車両ほど中継車両になりやすいように中継車両を決定する。まず、各車両に対して、車種に応じて中継車両となる確率に連動したスコア(以下、中継スコアという)を決定する。バスやトラックなどの大型の車両であるほど中継スコアが大きくなるように決定される。
【0050】
本実施形態では、各車両は、第2の実施形態で車速を交換したのと同様の方法により(図4参照)、自車の中継スコアを周囲の車両に通知する。これにより、各車両は自車の周囲の車両の中継スコアを取得することができる。
【0051】
次に、通信時の処理の流れを図10のフローチャートを参照して説明する。図10は、本実施形態における、通信時の送信車両および受信車両(中継車両)の処理の流れを示すフローチャートである。まず、データを送信する車両は送信するパケットを作成し(S40)、送信する(S41)。このパケットを受信(S42)した受信車両は、自車の中継スコアが自車周囲の車両の中継スコアと比較して相対的に大きいか否か判定する(S43)。この判断は、たとえば、自車の周囲に中継スコアが自車の中継スコアよりも所定の閾値以上小さい車両が存在するか否かによって判定しても良いし、自車周囲の車両の中継スコアの平均や分散といった統計値に基づいて判定しても良い。自車の中継スコアが相対的に大きいと判定された場合(S43−YES)は受信したパケットを中継し(S44)、相対的に大きいと判定されなかった場合(S43−NO)は中継せずに処理を終了する。
【0052】
このように、受信車両の車種に基づいて、他の遮蔽物になる可能性が高く、かつ、電波到達範囲の広い車両が中継車両を中継車両として選択することでき、効率的な通信を実現できる。また、中継するか否かの判断は受信車両が自律的に判断しているため、簡易な方
法で中継車両を決定することができる。
【0053】
なお、上記では受信車両は中継スコアの相対的な大きさに基づいて、受信したパケットを中継するか否かを判定しているが、あらかじめ定められた所定の閾値に基づいて(すなわち絶対的な基準に従って)中継するか否かを判定しても良い。
【0054】
(第5の実施形態)
上記の実施形態では、送信車両の速度との速度差、グループ内の車両の平均速度との速度差、位置情報、車種を判断基準として、受信車両が受信したデータを中継するか否か判定していた。本実施形態では、これらの判断基準のうち複数の判断基準に従って、受信車両が受信したデータを中継するか否かを判定する。
【0055】
本実施形態では、受信車両は判断基準ごとに中継を行う度合いを示すスコアを算出する。たとえば、相対速度に基づいたスコア算出では、相対速度が小さいほど高いスコアとして算出し、相対速度が大きいほど低いスコアとして算出する。また、受信時の車両の位置が交差点等に近ければ高いスコアとして算出する。また、受信車両の車種が相対的に大型車両であるほど高いスコアとして算出する。受信車両は、個々の判断基準ごとに算出されたスコアを合計し、その合計値が所定の閾値以上であれば受信したデータを中継する。なお、スコアの合計は単純な和であっても良く、重み付けをした合計であっても良い。
【0056】
また、たとえば、上記それぞれの判断基準ごとに上記の実施形態で説明した中継するか否かの判定を行い、いずれか1つの判断基準で中継すると判定された場合には受信したデータを中継しても良い。
【0057】
このように、複数の基準に従って受信したデータを中継するか否か判定することで、より適切な車両を中継車両とすることが可能となる。
【0058】
(第6の実施形態)
上記の実施形態ではいずれも、中継車両の決定は、受信車両が自律的に受信データを中継するか否かを判断することによって決定されていた。しかしながら、中継車両の決定は、送信車両が行っても良い。本実施形態では、送信車両が、複数の受信車両のうちどの車両が中継車両として機能するかを決定する。送信車両は、あらかじめ、自車の周囲の車両について、速度や位置や車種に関する情報を取得する。そして、上述したような判断基準に基づいて、すなわち、自車との相対速度が小さい車両や、車両グループの平均速度との速度差が小さい車両や、中継領域に位置する車両や、相対的に大型な車種の車両を中継車両として選択する。
【0059】
送信車両は、このようにして選択した中継車両を送信するデータパケットのヘッダ部に格納してデータパケットを送信しても良い。この場合、データパケットを受信した車両は、ヘッダ部を確認して自車が中継車両として選択されている場合には受信したパケットの中継を行う。あるいは、各車両は、選択した中継車両をあらかじめ周囲の車両に通知しておいても良い。この場合は、データパケットを受信した車両は、このパケットが自車を中継車両として選択している車両からのパケットである場合には、このパケットを中継すると判断する。
【0060】
また、OLSRと同様の手法により、車両ごとに自車の車両を中継する車両をあらかじめ定めておいても良い。すなわち、各車両は、速度・位置情報・車種に応じて中継車両になる度合い(以下、中継度という)を決定し、周囲の車両に中継度通知パケットで通知する。中継度通知パケットは、OLSRにおけるHelloパケットに中継度を格納したものとして構成しても良い。また、中継度は各車両が決定してHelloパケットを用いて
送信するのではなく、各車両は自車の車速等をHelloパケットに格納して送信し、このパケットを受信した車両が自車の車速との差に基づいて、その車両の中継度を決定しても良い。
【0061】
なお、中継度通知パケットには、このパケットを送信する車両の周囲の車両についての中継度も格納されているので、各車両は2ホップ先の車両についての中継度およびネットワークトポロジーを取得することが可能である。各車両は、このようにして取得したネットワークトポロジーと中継度を参照して、2ホップ先の全ての車両までデータが送信されるように、かつ、中継車両の数が最小となるように中継車両を選択する。そして、選択した中継車両の集合を周囲の車両に通知することで、中継車両として選択された車両は、自車がどの車両に対する中継車両であるかを検知することができる。
【0062】
このように、各車両について中継車両を決定しておくことで、データ受信時には、受信車両がこのデータの送信元の車両の中継車両として選択されているか否かにしたがって、中継するか否かを決定することができる。
【符号の説明】
【0063】
a,b,c 車両
10 ヘッダ部
11 送信元車両ID
12 受信車両ID
13 メッセージ種別
14 車速
20 ペイロード
【特許請求の範囲】
【請求項1】
1または複数の車両がデータを中継することによって車両間で通信を行う車車間通信システムであって、
データを受信する受信車両の車種情報に基づいて、複数の受信車両のうちから前記データを中継する中継車両として機能する車両が決定される
ことを特徴とする車車間通信システム。
【請求項2】
前記中継車両として機能する車両は、前記送信車両が決定する
ことを特徴とする請求項1に記載の車車間通信システム。
【請求項3】
前記中継車両として機能する車両は、前記受信車両が自律的に決定する
ことを特徴とする請求項1に記載の車車間通信システム。
【請求項4】
前記車車間通信システムを構成する車両は、互いに自車の車種情報を通知することで、自車周囲の車両についての車種情報を取得し、
前記受信車両は、自車周囲の車両の車種情報に基づいて、自車が相対的に大型の車両であれば、前記受信したデータを中継する
ことを特徴とする請求項1に記載の車車間通信システム。
【請求項5】
1または複数の車両がデータを中継することによって車両間で通信を行う車車間通信システムにおける車車間通信方法であって、
データを受信した受信車両の車種情報に基づいて、複数の受信車両のうちから前記データを中継する中継車両として機能する車両が決定される
ことを特徴とする車車間通信方法。
【請求項1】
1または複数の車両がデータを中継することによって車両間で通信を行う車車間通信システムであって、
データを受信する受信車両の車種情報に基づいて、複数の受信車両のうちから前記データを中継する中継車両として機能する車両が決定される
ことを特徴とする車車間通信システム。
【請求項2】
前記中継車両として機能する車両は、前記送信車両が決定する
ことを特徴とする請求項1に記載の車車間通信システム。
【請求項3】
前記中継車両として機能する車両は、前記受信車両が自律的に決定する
ことを特徴とする請求項1に記載の車車間通信システム。
【請求項4】
前記車車間通信システムを構成する車両は、互いに自車の車種情報を通知することで、自車周囲の車両についての車種情報を取得し、
前記受信車両は、自車周囲の車両の車種情報に基づいて、自車が相対的に大型の車両であれば、前記受信したデータを中継する
ことを特徴とする請求項1に記載の車車間通信システム。
【請求項5】
1または複数の車両がデータを中継することによって車両間で通信を行う車車間通信システムにおける車車間通信方法であって、
データを受信した受信車両の車種情報に基づいて、複数の受信車両のうちから前記データを中継する中継車両として機能する車両が決定される
ことを特徴とする車車間通信方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2010−259103(P2010−259103A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2010−164648(P2010−164648)
【出願日】平成22年7月22日(2010.7.22)
【分割の表示】特願2006−130250(P2006−130250)の分割
【原出願日】平成18年5月9日(2006.5.9)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成22年7月22日(2010.7.22)
【分割の表示】特願2006−130250(P2006−130250)の分割
【原出願日】平成18年5月9日(2006.5.9)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【Fターム(参考)】
[ Back to top ]