
車載システム及び遠隔地点観測システム
【課題】効率的に遠隔地点の観測を行える「車載システム及び遠隔地点観測システム」を提供する。
【解決手段】車両Aの車載システム10からブロードキャスト形式で、監視地点を指定した地点監視代行探索通知501が送信されると、監視地点を監視方向からカメラ7で撮影可能である車両Bの車載システム10が地点監視代行可能通知502で応答し、車両Bのカメラ7で撮影した動画像504の車両Aへの送信と、車両Aにおける表示が行われる。そして、車両Bが、車両の移動に伴い監視地点の撮影を行うことができなくなると、車両Bから車両Aに地点監視代行終了通知506が送信される。この地点監視代行終了通知506を受け取った車両Aの車載システム10は、地点代行探索通知508を、再度、地点監視代行可能通知の応答があるまで、繰り返しブロードキャスト送信する。
【解決手段】車両Aの車載システム10からブロードキャスト形式で、監視地点を指定した地点監視代行探索通知501が送信されると、監視地点を監視方向からカメラ7で撮影可能である車両Bの車載システム10が地点監視代行可能通知502で応答し、車両Bのカメラ7で撮影した動画像504の車両Aへの送信と、車両Aにおける表示が行われる。そして、車両Bが、車両の移動に伴い監視地点の撮影を行うことができなくなると、車両Bから車両Aに地点監視代行終了通知506が送信される。この地点監視代行終了通知506を受け取った車両Aの車載システム10は、地点代行探索通知508を、再度、地点監視代行可能通知の応答があるまで、繰り返しブロードキャスト送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車に搭載された車載システムにおいて、当該車載システムのユーザに対して、遠隔地点の画像を提示する技術に関するものである。
【背景技術】
【0002】
自動車に搭載された車載システムにおいて、当該車載システムのユーザに対して、遠隔地点の画像を提示する技術としては、路側に路上を撮影する定点カメラを固定的に配置し、車載システムが、ユーザの所望の地点の定点カメラで路上を撮影した画像を通信を介して定点カメラより取得し表示する技術が知られている(たとえば、特許文献1)。
【0003】
また、このような定点カメラを補足するために、カメラを搭載した車両を設け、当該車両で撮影した各地点の画像を定点カメラで撮影した画像と共にサーバに蓄積しておき、他の車両の車載システムにおいて、通信を介して、サーバから所望の地点の画像を取得し、表示する技術も知られている(たとえば、特許文献2)。
【特許文献1】特開平11−60090号公報
【特許文献2】特開2003−162793号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記定点カメラを路上に配置する技術によれば、定点カメラが設置されていない地点については、車載システムにおいてその地点の画像を取得、表示できないという問題がある。
一方、カメラを搭載した車両を設け、当該車両で撮影した各地点の画像を定点カメラで撮影した画像と共にサーバに蓄積し、サーバが蓄積した画像のうちから車載システムが所望の地点の画像を取得する技術によれば以下の問題がある。すなわち、予め車載システムのユーザが観測を望む地点を知ることはできないので、車載システムのユーザが所望する地点の現在のようすを観測した画像がサーバから提供されることを保証するためには、カメラを搭載した車両によってあらゆる地点のあらゆる時点のようすを撮影する必要がある。そして、このような撮影を行うことは、現実的でなく、また、撮影した画像の全てが車載システムによって取得され利用されるわけではないことより、極めて非効率的である。
【0005】
そこで、本発明は、効率的な構成において、車載システムのユーザが所望の遠隔地点のようすを観測可能とすることを課題とする。
【課題を解決するための手段】
【0006】
前記課題達成のために、本発明は、車両に搭載される車載システムに、車両周辺の映像を撮影するカメラと、表示装置と、無線通信を行う無線通信装置と、自車両の現在位置を算出する現在位置算出手段と、ユーザから観測地点の設定を受け付ける観測地点設定手段と、他の車載システムであって、当該他の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を撮影可能な位置である他の車載システムに前記観測地点の撮影を依頼する撮影依頼手段と、前記無線通信を介して他の車載システムから観測地点の画像を受信し、受信した画像を前記表示装置に表示する観測地点画像表示手段と、他の車載システムから、前記観測地点の撮影を依頼された場合に、前記カメラで前記観測地点を撮影し、撮影した画像を依頼元の他の車載システムに前記無線通信を介して送信する撮影代行手段とを備えたものである。
【0007】
このような車載システムによれば、各車両の車載システムのユーザは、所望の遠隔地点の映像を観測できるようになる。また、各車両の車載システムにおいてカメラによる撮影や送信は、その映像が必要とされる場合にのみ行われるので、任意のユーザに任意の地点の観測を可能とするシステムを効率的に構成することができる。
【0008】
ここで、以上の車載システムは、前記撮影代行手段において、前記観測地点の撮影を依頼された場合に、前記観測地点の撮影を行えなくなるまで前記観測地点の撮影と撮影した画像の送信を継続すると共に、前記観測地点の撮影を行えなくなった場合に、前記観測地点の撮影と撮影した画像の送信を終了するようにし、前記撮影依頼手段において、前記観測地点画像表示手段が受信していた前記観測地点の画像の送信元の他の車載システムにおいて前記観測地点の撮影と撮影した画像の送信が終了したときに、再度、前記探索と依頼を行うようにしてもよい。また、この場合には、さらに、前記撮影代行手段において、前記カメラで前記観測地点の画像として動画像を撮影して送信し、前記観測地点画像表示手段において、受信した前記観測地点の動画像を表示すると共に、前記観測地点の動画像の受信が中断した場合に、前記観測地点の動画像の受信が再開するまで、既に受信した前記観測地点の動画像を構成する画像フレームの画像を静止画表示することが好ましい。
【0009】
このようにすることにより、観測地点の撮影を依頼する他車を各時点において観測地点の撮影が可能な車両に順次切り替えることができる。したがって、各車両の車載システムのユーザは、遠隔地点の映像を、継続的に観測できるようになる。
また、以上の車載システムは、前記観測地点設定手段において、ユーザから観測地点と共に観測地点の観測方向の設定を受け付けるようにし、前記撮影依頼手段において、他の車載システムであって、当該他の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を前記観測方向より撮影可能な位置である他の車載システムに前記観測地点の前記観測方向からの撮影を依頼するようにし、前記撮影代行手段において、他の車載システムから、前記観測地点の前記観測方向からの撮影を依頼された場合に、前記カメラで前記観測地点を前記観測方向から撮影し、撮影した画像を依頼元の他の車載システムに前記無線通信を介して送信するようにしてもよい。
【0010】
このようにすることにより、各車両の車載システムのユーザは、所望の遠隔地点を所望の観測方向から観測できるようになる。
また、前記課題達成のために、本発明は、自動車の搭乗者に遠隔地点の映像を提示する遠隔地点観測システムとして、車両に搭載された第1種の車載システムと、各々異なる車両に搭載された複数の第2種の車載システムとより車載システムを提供する。ここで、前記第1種の車載システムは、表示装置と、無線通信を行う無線通信装置と、ユーザから観測地点の設定を受け付ける観測地点設定手段と、前記第2種の車載システムに、前記無線通信を介して前記観測地点の撮影を依頼する撮影依頼手段と、前記無線通信を介して第2種の車載システムから観測地点の画像を受信し、受信した画像を前記表示装置に表示する観測地点画像表示手段とを備えるものであり、前記第2種の車載システムは、車両周辺の映像を撮影するカメラと、無線通信を行う無線通信装置と、自車両の現在位置を算出する現在位置算出手段と、第1の車載システムから、前記観測地点の撮影を依頼された場合に、前記カメラで前記観測地点を撮影し、撮影した画像を依頼元の第1種の車載システムに前記無線通信を介して送信する撮影代行手段とを備えるものである。また、前記第1種の車載システムの前記撮影依頼手段は、第2種の車載システムであって、当該第2種の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を撮影可能な位置である第2種の車載システムに前記観測地点の撮影を依頼するものである。
【0011】
このような遠隔地点観測システムによれば、第1種の車載システムのユーザは、所望の遠隔地点の映像を観測できるようになる。また、第2種の車載システムにおいてカメラによる撮影や送信は、その映像が必要とされる場合にのみ行われるので、効率的な遠隔地点観測システムを実現することができる。
【発明の効果】
【0012】
以上のように本発明によれば、効率的な構成において、車載システムのユーザが所望の遠隔地点のようすを観測可能とすることができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施形態について説明する。
図1aに、本実施形態に係る遠隔地観測システムの構成を示す。
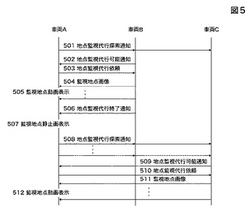
図示するように、遠隔地観測システムは、各車両に搭載される車載システム10と、各車載システム10を無線通信を介して収容するWAN20とを含んで構成される。
また、図1bに示すように、車載システム10は、ナビゲーション装置1と、操作部2と、表示装置3と、車両状態センサ4と、GPS受信機5と、無線通信を介してWAN20と接続するための移動電話機などである無線通信装置6と、カメラ7とを備えて構成される。ここで、ここで、車両状態センサ4は、角加速度センサや地磁気センサなどである方位センサや車速パルスセンサなどである車速センサなどの車両状態を検出するセンサ群である。また、カメラ7は、車両前方などの車両周辺のようすの動画像を撮影するカメラ7である。
【0014】
そして、ナビゲーション装置1は、地図を表す地図データを記憶したDVDドライブやHDDなどの記憶装置である地図データ記憶部11、現在状態算出部12、表示装置3や操作部2を用いたユーザとの間のGUIを制御するGUI制御部13、ルート探索部14、メモリ15、案内画像生成部16、制御部17、無線通信装置6による通信を制御する通信制御装置18、カメラ7の撮影画像の取込やカメラ7の動作制御を行う画像入力部19とを有する。
【0015】
但し、以上のナビゲーション装置1は、ハードウエア的には、マイクロプロセッサや、メモリ15や、その他のグラフィックプロセッサやジオメトリックプロセッサ等の周辺デバイスを有する一般的な構成を備えたCPU回路であって良く、この場合、以上に示したナビゲーション装置1の各部は、マイクロプロセッサが予め用意されたプログラムを実行することにより具現化するプロセスとして実現されるものであって良い。また、この場合、このようなプログラムは、記録媒体や適当な通信路を介して、ナビゲーション装置1に提供されるものであって良い。
【0016】
次に、図2に地図データ記憶部11に記憶される地図データの内容を示す。
ここで、地図データは、所定の地理的区域毎に図葉と呼ばれる単位で管理されており、各図葉の地図は、図葉の地理的区域またはこれを分割した区域毎に設けられた複数のユニットよりなる。そして、各ユニットは、自身に対応する区域の地図を表現するものである。
【0017】
そして、図2に示すように、地図データは、各ユニットと図葉との関係や、地図データの製作日時などを記述した管理データ、地図を表す基本地図データ、路線データとを含んで構成される。
そして、基本地図データは、前述したユニット毎のユニットデータと、各ユニットデータと図葉や対応区域との関係を記述したユニット管理データを含む。そして、各ユニットデータはユニット内の道路ネットワークを表す道路ユニットと、ユニット内の表示地図を規定する描画ユニットとを有する。
【0018】
次に、道路ユニットは道路網を表すデータであり、ノードリストと、リンクテーブルと、接続データとを有する。
ここで、道路ユニットでは、道路を直線であるリンクの集合として表現しており、この各リンクの端点がノードである。そして、ノードリストは、各ノードの座標や、各ノードの交差点に相当するノードであるか等を表す属性などを示すデータである。また、リンクテーブルは、各リンクの両端のノードの識別や、各リンクの距離や方位や、各リンクに与えた経路探索用のコストであるリンクコストや、リンクの属する路線の路線番号等を示すデータである。そして、接続データは、他ユニットとのノードやリンクの接続、対応関係を記述したデータである。
【0019】
次に、描画ユニットは、地形図形や道路図形や建物図形などの地図の地理的な表示要素となる各図形を規定する背景ユニットと、建物名称や道路名称や交差点名称などの地図上に表示する各文字列を規定する文字列ユニットと、駐車場やガソリンスタンド等の施設の存在を表すために地図上に表示するマークであるアイコンを規定するアイコンユニットとを有する。
【0020】
次に、地図データに含まれる路線データは、各道路毎に設けられた路線レコードを有し、各路線レコードには、道路の識別子である路線番号や、各道路の高速道路、国道、県道などの路線種別や、各道路の道路名称が記述される。
さて、このような構成において、ナビゲーション装置1の現在状態算出部12は、以下の処理を繰り返し行う。
すなわち、現在状態算出部12は、車両状態センサ4やGPS受信機5の出力から推定される現在位置に対して、地図データ記憶部11から読み出した地図データが示す前回決定した現在位置の周辺の地図とのマップマッチング処理などを施して、現在位置として最も確からしい座標と、現在の進行方向として最も確からしい方向と、現在の走行中のリンクとして最も確からしいリンクとを、それぞれ現在位置、現在進行方位、走行中リンクとして決定し、メモリ15に設定する。
【0021】
また、制御部17は、ユーザの目的地設定要求に応じて、ユーザから操作部2、GUI制御部13を介して目的地の設定を受付け、これをメモリ15にセットする。そして、目的地までの推奨ルートをルート探索部14に探索させる。ルート探索部14は、必要地理的範囲の道路ユニットのデータを地図データ記憶部11から読み出し、メモリ15に設定されている現在位置から目的地までの、走行中リンクを最初に辿る最小コストの経路を、リンクテーブルに記述されたリンクコストなどを用いた所定のコストモデルに基づいて推奨ルートとして算出し、算出した推奨ルートの経路データを、メモリ15にセットする。
【0022】
また、制御部17は、メモリ15にセットされた現在位置が目的地近傍となったならば、目的地到着と判定し、メモリ15にセットされている目的地と推奨ルートをクリアする処理も行う。
そして、案内画像生成部16は、メモリ15にセットされた現在位置もしくはユーザがカーソルで指定したポイントと、その時点で設定されている地図の表示縮尺に従って制御部17が算定した地図表示範囲の地図画像を、地図データ記録部に記憶された地図データの描画ユニットに基づいて描画する。また、描画した地図画像上に、メモリ15にセットされている現在位置や推奨ルートや目的地を描画した案内画像を生成し表示装置3に表示する。
【0023】
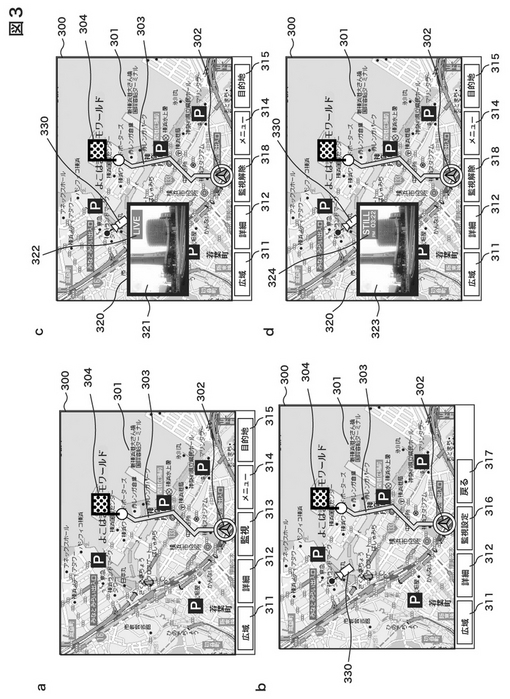
図3aは、このようにして表示装置3に表示される案内画像の例を示すものであり、図示した例では、現在位置を基準に地図の表示範囲が定められている。また、案内画像300は、現在位置周辺の地図画像301上に、現在位置を表す現在位置マーク302や、推奨ルートを表す推奨ルート図形303や、目的地を表す目的地図形304などが表されたものとなっている。
【0024】
以下、このような車載システム10において、車載システム10のユーザの遠隔地点の観測を可能とするために制御部17が行う処理について説明する。
制御装置は、GUI制御部13を介して、図3aに示すように、案内画像300の下部に、ユーザ操作を受け付けるためのコマンドボタンを表示する。図示した例では、このコマンドボタンとして、案内画像300の地図縮尺の変更操作受け付け用の広域ボタン311及び縮尺ボタン312と、監視地点設定開始操作受け付け用の監視ボタン313と、メニュー一覧呼び出し操作受け付け用のメニューボタン314と、目的地の設定/解除メニュー呼び出し操作受け付け用の目的地ボタン315などを設けている。
【0025】
さて、制御部17は、監視ボタン313がユーザによって操作されると、図3bに示すように、カメラ型カーソル330を地図画像301上に表示し、案内画像300の下部のコマンドボタンを、広域ボタン311、縮尺ボタン312と、監視設定ボタン316と、戻るボタン317に変更する。
【0026】
そして、ユーザのカメラ型カーソル330の移動、回転操作に応じて、地図画像301の上でカメラ型カーソル330を移動、回転する。ただし、カメラ型カーソル330の角度は、その時点のカメラ型カーソル330の先端(黒丸部分)の地図画像301上の位置に対応する地点最寄りの1または複数の道路の各上り方向と下り方向のうちの、いずれか一つの方向と、カメラ型カーソル330のカメラ意匠部分からカメラ型カーソル330の先端の黒丸部分に向かう方向が等しくなるように制限される。
【0027】
そして、監視設定ボタン316がユーザによって操作されたならば、その時点のカメラ型カーソル330の先端の地図画像301上の位置に対応する地点を開始地点としてメモリ15に設定し、その時点のカメラ型カーソル330の地図画像301上の方位(カメラ型カーソル330のカメラ意匠部分からカメラ型カーソル330の先端の黒丸部分に向かう方向の方位)を監視方向としてメモリ15に設定する。
【0028】
そして、図3cに示すように、案内画像300の下部のコマンドボタンを、広域ボタン311、縮尺ボタン312と、監視解除ボタン318と、メニューボタン314と、目的地ボタン316に変更する。また、地点監視処理を起動する。
さて、制御部17は、このように監視設定ボタン316の操作に応答して地点監視処理を行う他、地点監視代行処理を常時実行する。
以下、この地点監視処理と地点監視代行処理について説明する。
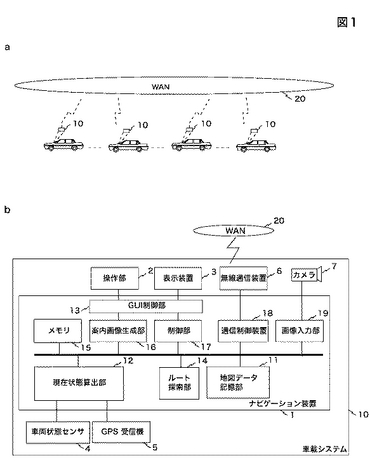
図4aに地点監視処理の手順を、図4bに地点監視代行処理の手順を示す。
まず、図4aの地点監視処理について説明する。
図示するように、この処理では、無線通信装置6を介してWAN20に、メモリ15に設定された監視地点と監視方向の情報を含めた地点監視代行探索通知をブロードキャスト形式で送信する(ステップ402)。
そして、地点監視代行探索通知の応答として、他の車両に搭載された車載システム10より地点監視代行可能通知を受信するのを一定期間待つ(ステップ406)。そして、一定期間内に地点監視代行可能通知を受信できなかった場合には、ステップ402に戻り、地点監視代行探索通知を再度送信する。また、地点監視代行可能通知を受信するのを待つ間に、ユーザによって、監視解除ボタン318が操作されたならば(ステップ404)、そのまま地点監視処理を終了する。
【0029】
さて、地点監視代行可能通知を受信した場合(ステップ406)には、地点監視代行可能通知の送信元の車載システム10に地点監視代行依頼を送信する(ステップ408)。ここで、この地点監視代行依頼は、ステップ402で送信した地点監視代行可能通知に対して、最初に地点監視代行可能通知を応答した車載システム10に対してのみ送信する。
【0030】
次に、地点監視代行依頼を送信した車載システム10を地点監視代行システムとして、地点監視代行システムからのWAN20を介した監視地点の動画像の受信を待ち(ステップ410)、監視地点の動画像の受信が開始したならば、以降、受信した動画像をGUI制御部13を介して表示装置3に表示する(ステップ412)。
【0031】
ここで、この監視地点の動画像の表示は、図3cに示すように、案内画像300の上に地点監視ウインドウ320を設定し、この地点監視ウインドウ320の中に監視地点の動画像321を表示することにより行う。また、動画像表示中は、表示している画像が現在の監視地点の画像であることを表す「LIVE」の文字列322を、地点監視ウインドウ320の内に表示する。
【0032】
さて、図4aに戻り、監視地点の動画像の表示を開始したならば(ステップ412)、ユーザの監視解除ボタン318の操作の発生と(ステップ414)、地点監視代行システムからの地点監視代行終了通知の受信を監視し(ステップ416)、ユーザの監視解除ボタン318の操作が発生したならば(ステップ414)、地点監視終了通知を地点監視代行システムに送信し(ステップ420)、地点監視処理を終了する。
【0033】
ここで、案内画像300の上に設定した地点監視ウインドウ320は、これを表示している場合には、地点監視処理の終了に伴い消去される。また、制御部17は、地点監視処理が終了したならば、案内画像300の下部に表示するコマンドボタンを、図3aの広域ボタン311、縮尺ボタン312、監視ボタン313、メニューボタン314、目的地ボタン315に復帰する。
【0034】
さて、ステップ416で、地点監視代行システムからの地点監視代行終了通知を受信した場合には(ステップ416)、図3dに示すように、地点監視ウインドウ320の表示を、地点監視代行システムから受信した動画像の画像フレームのうちの、当該動画像の受信終了時刻より所定期間前(たとえば、1秒前)の時刻に最も近い時刻に受信した画像フレームの画像323の静止画表示に切り替える(ステップ418)。また、地点監視ウインドウ320に表示している画像が過去の監視地点の静止画像であることを表す「STILL」の文字列と、表示している画像の画像フレームの受信時間324とを、地点監視ウインドウ320の内に表示する。
【0035】
そして、ステップ402に戻り地点監視代行探索通知のブロードキャスト送信からの処理に戻る。
以上、地点監視処理について説明した。
次に、制御部17が常時行う地点監視代行処理について説明する。
図4bに示すように、この処理では、まず、WAN20にブロードキャスト送信された地点監視代行探索通知の受信を監視する(ステップ452)。そして、地点監視代行探索通知を受信したならば、地点監視代行探索通知に含まれる情報で示される監視地点を、地点管理代行探索通知に含まれる情報で示される監視方向から、自車両のカメラ7で撮影可能かどうかを、メモリ15に設定された現在位置と現在進行方向と、地図データ記憶部11に記憶している地図データとより判定し(ステップ454)、撮影可能でない場合には、ステップ452に戻って、次の地点監視代行探索通知の受信を待つ。
【0036】
一方、監視地点を監視方向から自車両のカメラ7で撮影可能な場合には、地点監視代行探索通知の送信元の車載システム10に、地点監視代行可能通知をWAN20を介して送信する(ステップ456)。そして、地点監視代行可能通知の応答として地点監視代行依頼を受信するのを一定期間待ち(ステップ458)、一定期間内に地点監視代行依頼を受信できなかった場合には、ステップ452に戻って、次の地点監視代行探索通知の受信を待つ。
【0037】
また、一定期間内に地点監視代行依頼を受信した場合には(ステップ458)、カメラ7による監視地点の監視方向からの撮影と、撮影した動画像の地点監視代行依頼の送信元の車載システム10へのWAN20を介した送信を開始する(ステップ460)。
そして、地点監視代行依頼の送信元の車載システム10からの地点監視終了通知の受信と(ステップ462)、カメラ7で監視地点を監視方向から撮影可能である状態からカメラ7で監視地点を監視方向から撮影できない状態への遷移(ステップ464)を監視する。そして、地点監視終了通知を受信したならば(ステップ462)、カメラ7による監視地点の撮影を終了し(ステップ468)、ステップ452に戻って、次の地点監視代行探索通知の受信を待つ。また、自車両の移動に伴い、カメラ7で監視地点を監視方向から撮影できなくなったならば(ステップ464)、カメラ7による監視地点の撮影を終了し、地点監視代行終了通知を、地点監視代行依頼の送信元の車載システム10に送信し(ステップ466)、ステップ452に戻って、次の地点監視代行探索通知の受信を待つ。
【0038】
以上、地点監視代行処理について説明した。
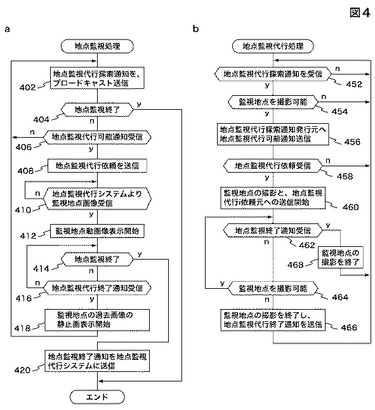
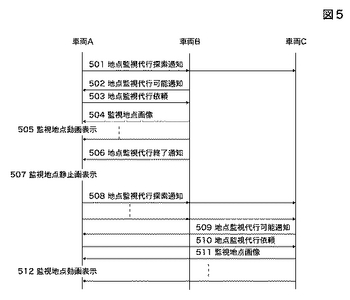
ここで、このような地点監視処理と地点監視代行処理によって、ユーザの遠隔地点の観測を可能とする動作シーケンス例を図5に示す。
いま、図中の車両Aのユーザが、図3bに示すように、車載システム10においてカメラ型カーソル330で監視地点と監視方向を指定し、監視設定ボタンで316監視の開始を指示すると、車両Aの車載システム10からブロードキャスト形式で、地点監視代行探索通知501が送信され、車両Bの車載システム10と車両Cの車載システム10によって受信される。
【0039】
いま、車両Bが監視地点の近傍を走行中であって監視地点を監視方向からカメラ7で撮影可能であり、車両Cがそうではないとすると、この車両Aからブロードキャスト送信された地点監視代行探索通知に対しては、車両Bの車載システム10からのみ地点監視代行可能通知502が応答される。そして、この地点監視代行可能通知502を受信した車両Aの車載システム10は、車両Bに地点監視代行依頼503を送信し、地点監視代行依頼503を受信した車両Bの車載システム10は監視地点の監視方向からのカメラ7による撮影と、撮影動画像504の車両Aへの送信を開始する。そして、この動画像を受け取った車両Aの車載システム10は、先に図3cに示したように、受け取った監視地点の動画像の表示505を開始する。
【0040】
そして、やがて、車両Bが、車両の移動に伴い監視地点の監視方向からの撮影を行うことができなくなると、車両Bの車載システム10から車両Aに地点監視代行終了通知506が送信される。
この地点監視代行終了通知506を受け取った車両Aの車載システム10は、先に図3dに示したように、表示装置3の表示を監視地点の動画像の表示から車両Bから受け取った監視地点の動画像から抽出した過去数秒前の監視地点の画像の静止画表示507に切り替える。ここで、このように、過去数秒前の画像を用いるのは、動画像の最終画像フレームの画像よりも、過去数秒前の画像の方が、より確実に画像中に監視地点が写り込んでいると期待できるためである。
【0041】
そして、車両Aの車載システム10は、地点代行探索通知508を、地点監視代行可能通知の応答があるまで、繰り返しブロードキャスト送信する。
その後、車両Cが、監視地点の監視方向からのカメラ7による撮影可能な地点に移動すると、車両Cの車載システム10は、車両Aから受信した、地点代行探索通知508に対して、地点監視代行可能通知509を応答する。そして、この地点監視代行可能通知509を受信した車両Aの車載システム10は、車両Cに地点監視代行依頼510を送信し、地点監視代行依頼510を受信した車両Cの車載システム10は監視地点の監視方向からのカメラ7による撮影と、撮影動画像511の車両Aへの送信を開始する。そして、この動画像を受け取った車両Aの車載システム10は、表示装置3の表示を静止画表示から、受け取った監視地点の動画像の表示512に切り替える。
【0042】
以上、本発明の実施形態について説明した。
ところで、以上では、監視地点を特定の監視方向から観測するようにした場合について説明したが、監視方向については、これを考慮しないようにしてもよい。すなわち、以上の実施形態において、ユーザから監視方向の指定は受け付けないようにし、地点監視処理のステップ402では、監視地点の情報を含めた地点監視代行探索通知をブロードキャスト形式で送信するようにし、地点監視代行処理のステップ454と464とでは、監視地点を自車両のカメラ7で撮影可能かどうかを判定し、ステップ460では監視地点を任意の方向から撮影するようにしてもよい。
【0043】
また、本実施形態におけるWAN20は、各車載システム10の間で直接または他の車載システム10を介して行う車車間通信によって形成されるものであってもよい。
また、本実施形態における遠隔地観測システムは、カメラを備えずに、地点監視処理のみを行い、地点監視代行処理は行わない車載システムを含むようにしてもよい。また、地点監視処理は行わず、地点監視代行処理のみを行う車載システムを含むようにしてもよい。
【0044】
以上のように本実施形態によれば、各車両の車載システム10のユーザは、所望の遠隔地点の映像を継続的に観測できるようになる。したがって、目的地到着前に目的地のようすを観測し、その変化に応じて予定を変更修正などすることができるようになる。すなわち、たとえば、利用予定の駐車場のようすを観測しながら当該駐車場に向かいつつ、当該駐車場が混雑するようになったならば、他の駐車場に進路を変更することなどができる。
【0045】
また、本実施形態によれば、各車両の車載システム10においてカメラ7による撮影や送信は、その映像が必要とされる場合にのみ行われるので、効率的な遠隔地観測システムを実現することができる。
【図面の簡単な説明】
【0046】
【図1】本発明の実施形態に係る遠隔地観測システムの構成を示すブロック図である。
【図2】本発明の実施形態に係る車載システムが備える地図データの内容を示す図である。
【図3】本発明の実施形態に係る車載システムの表示画面例を示す図である。
【図4】本発明の実施形態に係る車載システムが行う地点監視処理と地点監視代行処理を示すフローチャートである。
【図5】本発明の実施形態に係る地点観測のための車載システムの動作シーケンス例を示す図である。
【符号の説明】
【0047】
1…ナビゲーション装置、2…操作部、3…表示装置、4…車両状態センサ、5…GPS受信機、6…無線通信装置、7…カメラ、10…車載システム、11…地図データ記憶部、12…現在状態算出部、13…GUI制御部、14…ルート探索部、15…メモリ、16…案内画像生成部、17…制御部、18…通信制御装置、19…画像入力部、20…WAN。
【技術分野】
【0001】
本発明は、自動車に搭載された車載システムにおいて、当該車載システムのユーザに対して、遠隔地点の画像を提示する技術に関するものである。
【背景技術】
【0002】
自動車に搭載された車載システムにおいて、当該車載システムのユーザに対して、遠隔地点の画像を提示する技術としては、路側に路上を撮影する定点カメラを固定的に配置し、車載システムが、ユーザの所望の地点の定点カメラで路上を撮影した画像を通信を介して定点カメラより取得し表示する技術が知られている(たとえば、特許文献1)。
【0003】
また、このような定点カメラを補足するために、カメラを搭載した車両を設け、当該車両で撮影した各地点の画像を定点カメラで撮影した画像と共にサーバに蓄積しておき、他の車両の車載システムにおいて、通信を介して、サーバから所望の地点の画像を取得し、表示する技術も知られている(たとえば、特許文献2)。
【特許文献1】特開平11−60090号公報
【特許文献2】特開2003−162793号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
前記定点カメラを路上に配置する技術によれば、定点カメラが設置されていない地点については、車載システムにおいてその地点の画像を取得、表示できないという問題がある。
一方、カメラを搭載した車両を設け、当該車両で撮影した各地点の画像を定点カメラで撮影した画像と共にサーバに蓄積し、サーバが蓄積した画像のうちから車載システムが所望の地点の画像を取得する技術によれば以下の問題がある。すなわち、予め車載システムのユーザが観測を望む地点を知ることはできないので、車載システムのユーザが所望する地点の現在のようすを観測した画像がサーバから提供されることを保証するためには、カメラを搭載した車両によってあらゆる地点のあらゆる時点のようすを撮影する必要がある。そして、このような撮影を行うことは、現実的でなく、また、撮影した画像の全てが車載システムによって取得され利用されるわけではないことより、極めて非効率的である。
【0005】
そこで、本発明は、効率的な構成において、車載システムのユーザが所望の遠隔地点のようすを観測可能とすることを課題とする。
【課題を解決するための手段】
【0006】
前記課題達成のために、本発明は、車両に搭載される車載システムに、車両周辺の映像を撮影するカメラと、表示装置と、無線通信を行う無線通信装置と、自車両の現在位置を算出する現在位置算出手段と、ユーザから観測地点の設定を受け付ける観測地点設定手段と、他の車載システムであって、当該他の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を撮影可能な位置である他の車載システムに前記観測地点の撮影を依頼する撮影依頼手段と、前記無線通信を介して他の車載システムから観測地点の画像を受信し、受信した画像を前記表示装置に表示する観測地点画像表示手段と、他の車載システムから、前記観測地点の撮影を依頼された場合に、前記カメラで前記観測地点を撮影し、撮影した画像を依頼元の他の車載システムに前記無線通信を介して送信する撮影代行手段とを備えたものである。
【0007】
このような車載システムによれば、各車両の車載システムのユーザは、所望の遠隔地点の映像を観測できるようになる。また、各車両の車載システムにおいてカメラによる撮影や送信は、その映像が必要とされる場合にのみ行われるので、任意のユーザに任意の地点の観測を可能とするシステムを効率的に構成することができる。
【0008】
ここで、以上の車載システムは、前記撮影代行手段において、前記観測地点の撮影を依頼された場合に、前記観測地点の撮影を行えなくなるまで前記観測地点の撮影と撮影した画像の送信を継続すると共に、前記観測地点の撮影を行えなくなった場合に、前記観測地点の撮影と撮影した画像の送信を終了するようにし、前記撮影依頼手段において、前記観測地点画像表示手段が受信していた前記観測地点の画像の送信元の他の車載システムにおいて前記観測地点の撮影と撮影した画像の送信が終了したときに、再度、前記探索と依頼を行うようにしてもよい。また、この場合には、さらに、前記撮影代行手段において、前記カメラで前記観測地点の画像として動画像を撮影して送信し、前記観測地点画像表示手段において、受信した前記観測地点の動画像を表示すると共に、前記観測地点の動画像の受信が中断した場合に、前記観測地点の動画像の受信が再開するまで、既に受信した前記観測地点の動画像を構成する画像フレームの画像を静止画表示することが好ましい。
【0009】
このようにすることにより、観測地点の撮影を依頼する他車を各時点において観測地点の撮影が可能な車両に順次切り替えることができる。したがって、各車両の車載システムのユーザは、遠隔地点の映像を、継続的に観測できるようになる。
また、以上の車載システムは、前記観測地点設定手段において、ユーザから観測地点と共に観測地点の観測方向の設定を受け付けるようにし、前記撮影依頼手段において、他の車載システムであって、当該他の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を前記観測方向より撮影可能な位置である他の車載システムに前記観測地点の前記観測方向からの撮影を依頼するようにし、前記撮影代行手段において、他の車載システムから、前記観測地点の前記観測方向からの撮影を依頼された場合に、前記カメラで前記観測地点を前記観測方向から撮影し、撮影した画像を依頼元の他の車載システムに前記無線通信を介して送信するようにしてもよい。
【0010】
このようにすることにより、各車両の車載システムのユーザは、所望の遠隔地点を所望の観測方向から観測できるようになる。
また、前記課題達成のために、本発明は、自動車の搭乗者に遠隔地点の映像を提示する遠隔地点観測システムとして、車両に搭載された第1種の車載システムと、各々異なる車両に搭載された複数の第2種の車載システムとより車載システムを提供する。ここで、前記第1種の車載システムは、表示装置と、無線通信を行う無線通信装置と、ユーザから観測地点の設定を受け付ける観測地点設定手段と、前記第2種の車載システムに、前記無線通信を介して前記観測地点の撮影を依頼する撮影依頼手段と、前記無線通信を介して第2種の車載システムから観測地点の画像を受信し、受信した画像を前記表示装置に表示する観測地点画像表示手段とを備えるものであり、前記第2種の車載システムは、車両周辺の映像を撮影するカメラと、無線通信を行う無線通信装置と、自車両の現在位置を算出する現在位置算出手段と、第1の車載システムから、前記観測地点の撮影を依頼された場合に、前記カメラで前記観測地点を撮影し、撮影した画像を依頼元の第1種の車載システムに前記無線通信を介して送信する撮影代行手段とを備えるものである。また、前記第1種の車載システムの前記撮影依頼手段は、第2種の車載システムであって、当該第2種の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を撮影可能な位置である第2種の車載システムに前記観測地点の撮影を依頼するものである。
【0011】
このような遠隔地点観測システムによれば、第1種の車載システムのユーザは、所望の遠隔地点の映像を観測できるようになる。また、第2種の車載システムにおいてカメラによる撮影や送信は、その映像が必要とされる場合にのみ行われるので、効率的な遠隔地点観測システムを実現することができる。
【発明の効果】
【0012】
以上のように本発明によれば、効率的な構成において、車載システムのユーザが所望の遠隔地点のようすを観測可能とすることができる。
【発明を実施するための最良の形態】
【0013】
以下、本発明の実施形態について説明する。
図1aに、本実施形態に係る遠隔地観測システムの構成を示す。
図示するように、遠隔地観測システムは、各車両に搭載される車載システム10と、各車載システム10を無線通信を介して収容するWAN20とを含んで構成される。
また、図1bに示すように、車載システム10は、ナビゲーション装置1と、操作部2と、表示装置3と、車両状態センサ4と、GPS受信機5と、無線通信を介してWAN20と接続するための移動電話機などである無線通信装置6と、カメラ7とを備えて構成される。ここで、ここで、車両状態センサ4は、角加速度センサや地磁気センサなどである方位センサや車速パルスセンサなどである車速センサなどの車両状態を検出するセンサ群である。また、カメラ7は、車両前方などの車両周辺のようすの動画像を撮影するカメラ7である。
【0014】
そして、ナビゲーション装置1は、地図を表す地図データを記憶したDVDドライブやHDDなどの記憶装置である地図データ記憶部11、現在状態算出部12、表示装置3や操作部2を用いたユーザとの間のGUIを制御するGUI制御部13、ルート探索部14、メモリ15、案内画像生成部16、制御部17、無線通信装置6による通信を制御する通信制御装置18、カメラ7の撮影画像の取込やカメラ7の動作制御を行う画像入力部19とを有する。
【0015】
但し、以上のナビゲーション装置1は、ハードウエア的には、マイクロプロセッサや、メモリ15や、その他のグラフィックプロセッサやジオメトリックプロセッサ等の周辺デバイスを有する一般的な構成を備えたCPU回路であって良く、この場合、以上に示したナビゲーション装置1の各部は、マイクロプロセッサが予め用意されたプログラムを実行することにより具現化するプロセスとして実現されるものであって良い。また、この場合、このようなプログラムは、記録媒体や適当な通信路を介して、ナビゲーション装置1に提供されるものであって良い。
【0016】
次に、図2に地図データ記憶部11に記憶される地図データの内容を示す。
ここで、地図データは、所定の地理的区域毎に図葉と呼ばれる単位で管理されており、各図葉の地図は、図葉の地理的区域またはこれを分割した区域毎に設けられた複数のユニットよりなる。そして、各ユニットは、自身に対応する区域の地図を表現するものである。
【0017】
そして、図2に示すように、地図データは、各ユニットと図葉との関係や、地図データの製作日時などを記述した管理データ、地図を表す基本地図データ、路線データとを含んで構成される。
そして、基本地図データは、前述したユニット毎のユニットデータと、各ユニットデータと図葉や対応区域との関係を記述したユニット管理データを含む。そして、各ユニットデータはユニット内の道路ネットワークを表す道路ユニットと、ユニット内の表示地図を規定する描画ユニットとを有する。
【0018】
次に、道路ユニットは道路網を表すデータであり、ノードリストと、リンクテーブルと、接続データとを有する。
ここで、道路ユニットでは、道路を直線であるリンクの集合として表現しており、この各リンクの端点がノードである。そして、ノードリストは、各ノードの座標や、各ノードの交差点に相当するノードであるか等を表す属性などを示すデータである。また、リンクテーブルは、各リンクの両端のノードの識別や、各リンクの距離や方位や、各リンクに与えた経路探索用のコストであるリンクコストや、リンクの属する路線の路線番号等を示すデータである。そして、接続データは、他ユニットとのノードやリンクの接続、対応関係を記述したデータである。
【0019】
次に、描画ユニットは、地形図形や道路図形や建物図形などの地図の地理的な表示要素となる各図形を規定する背景ユニットと、建物名称や道路名称や交差点名称などの地図上に表示する各文字列を規定する文字列ユニットと、駐車場やガソリンスタンド等の施設の存在を表すために地図上に表示するマークであるアイコンを規定するアイコンユニットとを有する。
【0020】
次に、地図データに含まれる路線データは、各道路毎に設けられた路線レコードを有し、各路線レコードには、道路の識別子である路線番号や、各道路の高速道路、国道、県道などの路線種別や、各道路の道路名称が記述される。
さて、このような構成において、ナビゲーション装置1の現在状態算出部12は、以下の処理を繰り返し行う。
すなわち、現在状態算出部12は、車両状態センサ4やGPS受信機5の出力から推定される現在位置に対して、地図データ記憶部11から読み出した地図データが示す前回決定した現在位置の周辺の地図とのマップマッチング処理などを施して、現在位置として最も確からしい座標と、現在の進行方向として最も確からしい方向と、現在の走行中のリンクとして最も確からしいリンクとを、それぞれ現在位置、現在進行方位、走行中リンクとして決定し、メモリ15に設定する。
【0021】
また、制御部17は、ユーザの目的地設定要求に応じて、ユーザから操作部2、GUI制御部13を介して目的地の設定を受付け、これをメモリ15にセットする。そして、目的地までの推奨ルートをルート探索部14に探索させる。ルート探索部14は、必要地理的範囲の道路ユニットのデータを地図データ記憶部11から読み出し、メモリ15に設定されている現在位置から目的地までの、走行中リンクを最初に辿る最小コストの経路を、リンクテーブルに記述されたリンクコストなどを用いた所定のコストモデルに基づいて推奨ルートとして算出し、算出した推奨ルートの経路データを、メモリ15にセットする。
【0022】
また、制御部17は、メモリ15にセットされた現在位置が目的地近傍となったならば、目的地到着と判定し、メモリ15にセットされている目的地と推奨ルートをクリアする処理も行う。
そして、案内画像生成部16は、メモリ15にセットされた現在位置もしくはユーザがカーソルで指定したポイントと、その時点で設定されている地図の表示縮尺に従って制御部17が算定した地図表示範囲の地図画像を、地図データ記録部に記憶された地図データの描画ユニットに基づいて描画する。また、描画した地図画像上に、メモリ15にセットされている現在位置や推奨ルートや目的地を描画した案内画像を生成し表示装置3に表示する。
【0023】
図3aは、このようにして表示装置3に表示される案内画像の例を示すものであり、図示した例では、現在位置を基準に地図の表示範囲が定められている。また、案内画像300は、現在位置周辺の地図画像301上に、現在位置を表す現在位置マーク302や、推奨ルートを表す推奨ルート図形303や、目的地を表す目的地図形304などが表されたものとなっている。
【0024】
以下、このような車載システム10において、車載システム10のユーザの遠隔地点の観測を可能とするために制御部17が行う処理について説明する。
制御装置は、GUI制御部13を介して、図3aに示すように、案内画像300の下部に、ユーザ操作を受け付けるためのコマンドボタンを表示する。図示した例では、このコマンドボタンとして、案内画像300の地図縮尺の変更操作受け付け用の広域ボタン311及び縮尺ボタン312と、監視地点設定開始操作受け付け用の監視ボタン313と、メニュー一覧呼び出し操作受け付け用のメニューボタン314と、目的地の設定/解除メニュー呼び出し操作受け付け用の目的地ボタン315などを設けている。
【0025】
さて、制御部17は、監視ボタン313がユーザによって操作されると、図3bに示すように、カメラ型カーソル330を地図画像301上に表示し、案内画像300の下部のコマンドボタンを、広域ボタン311、縮尺ボタン312と、監視設定ボタン316と、戻るボタン317に変更する。
【0026】
そして、ユーザのカメラ型カーソル330の移動、回転操作に応じて、地図画像301の上でカメラ型カーソル330を移動、回転する。ただし、カメラ型カーソル330の角度は、その時点のカメラ型カーソル330の先端(黒丸部分)の地図画像301上の位置に対応する地点最寄りの1または複数の道路の各上り方向と下り方向のうちの、いずれか一つの方向と、カメラ型カーソル330のカメラ意匠部分からカメラ型カーソル330の先端の黒丸部分に向かう方向が等しくなるように制限される。
【0027】
そして、監視設定ボタン316がユーザによって操作されたならば、その時点のカメラ型カーソル330の先端の地図画像301上の位置に対応する地点を開始地点としてメモリ15に設定し、その時点のカメラ型カーソル330の地図画像301上の方位(カメラ型カーソル330のカメラ意匠部分からカメラ型カーソル330の先端の黒丸部分に向かう方向の方位)を監視方向としてメモリ15に設定する。
【0028】
そして、図3cに示すように、案内画像300の下部のコマンドボタンを、広域ボタン311、縮尺ボタン312と、監視解除ボタン318と、メニューボタン314と、目的地ボタン316に変更する。また、地点監視処理を起動する。
さて、制御部17は、このように監視設定ボタン316の操作に応答して地点監視処理を行う他、地点監視代行処理を常時実行する。
以下、この地点監視処理と地点監視代行処理について説明する。
図4aに地点監視処理の手順を、図4bに地点監視代行処理の手順を示す。
まず、図4aの地点監視処理について説明する。
図示するように、この処理では、無線通信装置6を介してWAN20に、メモリ15に設定された監視地点と監視方向の情報を含めた地点監視代行探索通知をブロードキャスト形式で送信する(ステップ402)。
そして、地点監視代行探索通知の応答として、他の車両に搭載された車載システム10より地点監視代行可能通知を受信するのを一定期間待つ(ステップ406)。そして、一定期間内に地点監視代行可能通知を受信できなかった場合には、ステップ402に戻り、地点監視代行探索通知を再度送信する。また、地点監視代行可能通知を受信するのを待つ間に、ユーザによって、監視解除ボタン318が操作されたならば(ステップ404)、そのまま地点監視処理を終了する。
【0029】
さて、地点監視代行可能通知を受信した場合(ステップ406)には、地点監視代行可能通知の送信元の車載システム10に地点監視代行依頼を送信する(ステップ408)。ここで、この地点監視代行依頼は、ステップ402で送信した地点監視代行可能通知に対して、最初に地点監視代行可能通知を応答した車載システム10に対してのみ送信する。
【0030】
次に、地点監視代行依頼を送信した車載システム10を地点監視代行システムとして、地点監視代行システムからのWAN20を介した監視地点の動画像の受信を待ち(ステップ410)、監視地点の動画像の受信が開始したならば、以降、受信した動画像をGUI制御部13を介して表示装置3に表示する(ステップ412)。
【0031】
ここで、この監視地点の動画像の表示は、図3cに示すように、案内画像300の上に地点監視ウインドウ320を設定し、この地点監視ウインドウ320の中に監視地点の動画像321を表示することにより行う。また、動画像表示中は、表示している画像が現在の監視地点の画像であることを表す「LIVE」の文字列322を、地点監視ウインドウ320の内に表示する。
【0032】
さて、図4aに戻り、監視地点の動画像の表示を開始したならば(ステップ412)、ユーザの監視解除ボタン318の操作の発生と(ステップ414)、地点監視代行システムからの地点監視代行終了通知の受信を監視し(ステップ416)、ユーザの監視解除ボタン318の操作が発生したならば(ステップ414)、地点監視終了通知を地点監視代行システムに送信し(ステップ420)、地点監視処理を終了する。
【0033】
ここで、案内画像300の上に設定した地点監視ウインドウ320は、これを表示している場合には、地点監視処理の終了に伴い消去される。また、制御部17は、地点監視処理が終了したならば、案内画像300の下部に表示するコマンドボタンを、図3aの広域ボタン311、縮尺ボタン312、監視ボタン313、メニューボタン314、目的地ボタン315に復帰する。
【0034】
さて、ステップ416で、地点監視代行システムからの地点監視代行終了通知を受信した場合には(ステップ416)、図3dに示すように、地点監視ウインドウ320の表示を、地点監視代行システムから受信した動画像の画像フレームのうちの、当該動画像の受信終了時刻より所定期間前(たとえば、1秒前)の時刻に最も近い時刻に受信した画像フレームの画像323の静止画表示に切り替える(ステップ418)。また、地点監視ウインドウ320に表示している画像が過去の監視地点の静止画像であることを表す「STILL」の文字列と、表示している画像の画像フレームの受信時間324とを、地点監視ウインドウ320の内に表示する。
【0035】
そして、ステップ402に戻り地点監視代行探索通知のブロードキャスト送信からの処理に戻る。
以上、地点監視処理について説明した。
次に、制御部17が常時行う地点監視代行処理について説明する。
図4bに示すように、この処理では、まず、WAN20にブロードキャスト送信された地点監視代行探索通知の受信を監視する(ステップ452)。そして、地点監視代行探索通知を受信したならば、地点監視代行探索通知に含まれる情報で示される監視地点を、地点管理代行探索通知に含まれる情報で示される監視方向から、自車両のカメラ7で撮影可能かどうかを、メモリ15に設定された現在位置と現在進行方向と、地図データ記憶部11に記憶している地図データとより判定し(ステップ454)、撮影可能でない場合には、ステップ452に戻って、次の地点監視代行探索通知の受信を待つ。
【0036】
一方、監視地点を監視方向から自車両のカメラ7で撮影可能な場合には、地点監視代行探索通知の送信元の車載システム10に、地点監視代行可能通知をWAN20を介して送信する(ステップ456)。そして、地点監視代行可能通知の応答として地点監視代行依頼を受信するのを一定期間待ち(ステップ458)、一定期間内に地点監視代行依頼を受信できなかった場合には、ステップ452に戻って、次の地点監視代行探索通知の受信を待つ。
【0037】
また、一定期間内に地点監視代行依頼を受信した場合には(ステップ458)、カメラ7による監視地点の監視方向からの撮影と、撮影した動画像の地点監視代行依頼の送信元の車載システム10へのWAN20を介した送信を開始する(ステップ460)。
そして、地点監視代行依頼の送信元の車載システム10からの地点監視終了通知の受信と(ステップ462)、カメラ7で監視地点を監視方向から撮影可能である状態からカメラ7で監視地点を監視方向から撮影できない状態への遷移(ステップ464)を監視する。そして、地点監視終了通知を受信したならば(ステップ462)、カメラ7による監視地点の撮影を終了し(ステップ468)、ステップ452に戻って、次の地点監視代行探索通知の受信を待つ。また、自車両の移動に伴い、カメラ7で監視地点を監視方向から撮影できなくなったならば(ステップ464)、カメラ7による監視地点の撮影を終了し、地点監視代行終了通知を、地点監視代行依頼の送信元の車載システム10に送信し(ステップ466)、ステップ452に戻って、次の地点監視代行探索通知の受信を待つ。
【0038】
以上、地点監視代行処理について説明した。
ここで、このような地点監視処理と地点監視代行処理によって、ユーザの遠隔地点の観測を可能とする動作シーケンス例を図5に示す。
いま、図中の車両Aのユーザが、図3bに示すように、車載システム10においてカメラ型カーソル330で監視地点と監視方向を指定し、監視設定ボタンで316監視の開始を指示すると、車両Aの車載システム10からブロードキャスト形式で、地点監視代行探索通知501が送信され、車両Bの車載システム10と車両Cの車載システム10によって受信される。
【0039】
いま、車両Bが監視地点の近傍を走行中であって監視地点を監視方向からカメラ7で撮影可能であり、車両Cがそうではないとすると、この車両Aからブロードキャスト送信された地点監視代行探索通知に対しては、車両Bの車載システム10からのみ地点監視代行可能通知502が応答される。そして、この地点監視代行可能通知502を受信した車両Aの車載システム10は、車両Bに地点監視代行依頼503を送信し、地点監視代行依頼503を受信した車両Bの車載システム10は監視地点の監視方向からのカメラ7による撮影と、撮影動画像504の車両Aへの送信を開始する。そして、この動画像を受け取った車両Aの車載システム10は、先に図3cに示したように、受け取った監視地点の動画像の表示505を開始する。
【0040】
そして、やがて、車両Bが、車両の移動に伴い監視地点の監視方向からの撮影を行うことができなくなると、車両Bの車載システム10から車両Aに地点監視代行終了通知506が送信される。
この地点監視代行終了通知506を受け取った車両Aの車載システム10は、先に図3dに示したように、表示装置3の表示を監視地点の動画像の表示から車両Bから受け取った監視地点の動画像から抽出した過去数秒前の監視地点の画像の静止画表示507に切り替える。ここで、このように、過去数秒前の画像を用いるのは、動画像の最終画像フレームの画像よりも、過去数秒前の画像の方が、より確実に画像中に監視地点が写り込んでいると期待できるためである。
【0041】
そして、車両Aの車載システム10は、地点代行探索通知508を、地点監視代行可能通知の応答があるまで、繰り返しブロードキャスト送信する。
その後、車両Cが、監視地点の監視方向からのカメラ7による撮影可能な地点に移動すると、車両Cの車載システム10は、車両Aから受信した、地点代行探索通知508に対して、地点監視代行可能通知509を応答する。そして、この地点監視代行可能通知509を受信した車両Aの車載システム10は、車両Cに地点監視代行依頼510を送信し、地点監視代行依頼510を受信した車両Cの車載システム10は監視地点の監視方向からのカメラ7による撮影と、撮影動画像511の車両Aへの送信を開始する。そして、この動画像を受け取った車両Aの車載システム10は、表示装置3の表示を静止画表示から、受け取った監視地点の動画像の表示512に切り替える。
【0042】
以上、本発明の実施形態について説明した。
ところで、以上では、監視地点を特定の監視方向から観測するようにした場合について説明したが、監視方向については、これを考慮しないようにしてもよい。すなわち、以上の実施形態において、ユーザから監視方向の指定は受け付けないようにし、地点監視処理のステップ402では、監視地点の情報を含めた地点監視代行探索通知をブロードキャスト形式で送信するようにし、地点監視代行処理のステップ454と464とでは、監視地点を自車両のカメラ7で撮影可能かどうかを判定し、ステップ460では監視地点を任意の方向から撮影するようにしてもよい。
【0043】
また、本実施形態におけるWAN20は、各車載システム10の間で直接または他の車載システム10を介して行う車車間通信によって形成されるものであってもよい。
また、本実施形態における遠隔地観測システムは、カメラを備えずに、地点監視処理のみを行い、地点監視代行処理は行わない車載システムを含むようにしてもよい。また、地点監視処理は行わず、地点監視代行処理のみを行う車載システムを含むようにしてもよい。
【0044】
以上のように本実施形態によれば、各車両の車載システム10のユーザは、所望の遠隔地点の映像を継続的に観測できるようになる。したがって、目的地到着前に目的地のようすを観測し、その変化に応じて予定を変更修正などすることができるようになる。すなわち、たとえば、利用予定の駐車場のようすを観測しながら当該駐車場に向かいつつ、当該駐車場が混雑するようになったならば、他の駐車場に進路を変更することなどができる。
【0045】
また、本実施形態によれば、各車両の車載システム10においてカメラ7による撮影や送信は、その映像が必要とされる場合にのみ行われるので、効率的な遠隔地観測システムを実現することができる。
【図面の簡単な説明】
【0046】
【図1】本発明の実施形態に係る遠隔地観測システムの構成を示すブロック図である。
【図2】本発明の実施形態に係る車載システムが備える地図データの内容を示す図である。
【図3】本発明の実施形態に係る車載システムの表示画面例を示す図である。
【図4】本発明の実施形態に係る車載システムが行う地点監視処理と地点監視代行処理を示すフローチャートである。
【図5】本発明の実施形態に係る地点観測のための車載システムの動作シーケンス例を示す図である。
【符号の説明】
【0047】
1…ナビゲーション装置、2…操作部、3…表示装置、4…車両状態センサ、5…GPS受信機、6…無線通信装置、7…カメラ、10…車載システム、11…地図データ記憶部、12…現在状態算出部、13…GUI制御部、14…ルート探索部、15…メモリ、16…案内画像生成部、17…制御部、18…通信制御装置、19…画像入力部、20…WAN。
【特許請求の範囲】
【請求項1】
車両に搭載される車載システムであって、
車両周辺の映像を撮影するカメラと、
表示装置と、
無線通信を行う無線通信装置と、
自車両の現在位置を算出する現在位置算出手段と、
ユーザから観測地点の設定を受け付ける観測地点設定手段と、
他の車載システムであって、当該他の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を撮影可能な位置である他の車載システムに前記観測地点の撮影を依頼する撮影依頼手段と、
前記無線通信を介して他の車載システムから前記観測地点の画像を受信し、受信した画像を前記表示装置に表示する観測地点画像表示手段と、
他の車載システムから、前記観測地点の撮影を依頼された場合に、前記カメラで前記観測地点を撮影し、撮影した画像を依頼元の他の車載システムに前記無線通信を介して送信する撮影代行手段とを有することを特徴とする車載システム。
【請求項2】
請求項1記載の車載システムであって、
前記撮影代行手段は、前記観測地点の撮影を依頼された場合に、前記観測地点の撮影を行えなくなるまで前記観測地点の撮影と撮影した画像の送信を継続すると共に、前記観測地点の撮影を行えなくなった場合に、前記観測地点の撮影と撮影した画像の送信を終了し、
前記撮影依頼手段は、前記観測地点画像表示手段が受信していた前記観測地点の画像の送信元の他の車載システムにおいて前記観測地点の撮影と撮影した画像の送信が終了したときに、再度、前記依頼を行うことを特徴とする車載システム。
【請求項3】
請求項2記載の車載システムであって、
前記撮影代行手段は、前記カメラで前記観測地点の画像として動画像を撮影して送信し、
前記観測地点画像表示手段は、受信した前記観測地点の動画像を表示すると共に、前記観測地点の動画像の受信が中断した場合に、前記観測地点の動画像の受信が再開するまで、既に受信した前記観測地点の動画像を構成する画像フレームの画像を静止画表示することを特徴とする車載システム。
【請求項4】
請求項1、2または3記載の車載システムであって、
前記観測地点設定手段は、ユーザから観測地点と共に観測地点の観測方向の設定を受け付け、
前記撮影依頼手段は、他の車載システムであって、当該他の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を前記観測方向より撮影可能な位置である他の車載システムに前記観測地点の前記観測方向からの撮影を依頼し、
前記撮影代行手段は、他の車載システムから、前記観測地点の前記観測方向からの撮影を依頼された場合に、前記カメラで前記観測地点を前記観測方向から撮影し、撮影した画像を依頼元の他の車載システムに前記無線通信を介して送信することを特徴とする車載システム。
【請求項5】
自動車の搭乗者に遠隔地点の映像を提示する遠隔地点観測システムであって、
車両に搭載された第1種の車載システムと、各々異なる車両に搭載された複数の第2種の車載システムとを有し、
前記第1種の車載システムは、
表示装置と、
無線通信を行う無線通信装置と、
ユーザから観測地点の設定を受け付ける観測地点設定手段と、
前記第2種の車載システムに、前記無線通信を介して前記観測地点の撮影を依頼する撮影依頼手段と、
前記無線通信を介して第2種の車載システムから観測地点の画像を受信し、受信した画像を前記表示装置に表示する観測地点画像表示手段とを有し、
前記第2種の車載システムは、
車両周辺の映像を撮影するカメラと、
無線通信を行う無線通信装置と、
自車両の現在位置を算出する現在位置算出手段と、
第1の車載システムから、前記観測地点の撮影を依頼された場合に、前記カメラで前記観測地点を撮影し、撮影した画像を依頼元の第1種の車載システムに前記無線通信を介して送信する撮影代行手段とを有し、
前記第1種の車載システムの前記撮影依頼手段は、第2種の車載システムであって、当該第2種の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を撮影可能な位置である第2種の車載システムに前記観測地点の撮影を依頼することを特徴とする遠隔地点観測システム。
【請求項1】
車両に搭載される車載システムであって、
車両周辺の映像を撮影するカメラと、
表示装置と、
無線通信を行う無線通信装置と、
自車両の現在位置を算出する現在位置算出手段と、
ユーザから観測地点の設定を受け付ける観測地点設定手段と、
他の車載システムであって、当該他の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を撮影可能な位置である他の車載システムに前記観測地点の撮影を依頼する撮影依頼手段と、
前記無線通信を介して他の車載システムから前記観測地点の画像を受信し、受信した画像を前記表示装置に表示する観測地点画像表示手段と、
他の車載システムから、前記観測地点の撮影を依頼された場合に、前記カメラで前記観測地点を撮影し、撮影した画像を依頼元の他の車載システムに前記無線通信を介して送信する撮影代行手段とを有することを特徴とする車載システム。
【請求項2】
請求項1記載の車載システムであって、
前記撮影代行手段は、前記観測地点の撮影を依頼された場合に、前記観測地点の撮影を行えなくなるまで前記観測地点の撮影と撮影した画像の送信を継続すると共に、前記観測地点の撮影を行えなくなった場合に、前記観測地点の撮影と撮影した画像の送信を終了し、
前記撮影依頼手段は、前記観測地点画像表示手段が受信していた前記観測地点の画像の送信元の他の車載システムにおいて前記観測地点の撮影と撮影した画像の送信が終了したときに、再度、前記依頼を行うことを特徴とする車載システム。
【請求項3】
請求項2記載の車載システムであって、
前記撮影代行手段は、前記カメラで前記観測地点の画像として動画像を撮影して送信し、
前記観測地点画像表示手段は、受信した前記観測地点の動画像を表示すると共に、前記観測地点の動画像の受信が中断した場合に、前記観測地点の動画像の受信が再開するまで、既に受信した前記観測地点の動画像を構成する画像フレームの画像を静止画表示することを特徴とする車載システム。
【請求項4】
請求項1、2または3記載の車載システムであって、
前記観測地点設定手段は、ユーザから観測地点と共に観測地点の観測方向の設定を受け付け、
前記撮影依頼手段は、他の車載システムであって、当該他の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を前記観測方向より撮影可能な位置である他の車載システムに前記観測地点の前記観測方向からの撮影を依頼し、
前記撮影代行手段は、他の車載システムから、前記観測地点の前記観測方向からの撮影を依頼された場合に、前記カメラで前記観測地点を前記観測方向から撮影し、撮影した画像を依頼元の他の車載システムに前記無線通信を介して送信することを特徴とする車載システム。
【請求項5】
自動車の搭乗者に遠隔地点の映像を提示する遠隔地点観測システムであって、
車両に搭載された第1種の車載システムと、各々異なる車両に搭載された複数の第2種の車載システムとを有し、
前記第1種の車載システムは、
表示装置と、
無線通信を行う無線通信装置と、
ユーザから観測地点の設定を受け付ける観測地点設定手段と、
前記第2種の車載システムに、前記無線通信を介して前記観測地点の撮影を依頼する撮影依頼手段と、
前記無線通信を介して第2種の車載システムから観測地点の画像を受信し、受信した画像を前記表示装置に表示する観測地点画像表示手段とを有し、
前記第2種の車載システムは、
車両周辺の映像を撮影するカメラと、
無線通信を行う無線通信装置と、
自車両の現在位置を算出する現在位置算出手段と、
第1の車載システムから、前記観測地点の撮影を依頼された場合に、前記カメラで前記観測地点を撮影し、撮影した画像を依頼元の第1種の車載システムに前記無線通信を介して送信する撮影代行手段とを有し、
前記第1種の車載システムの前記撮影依頼手段は、第2種の車載システムであって、当該第2種の車載システムの前記現在位置算出手段が算出している現在位置が前記観測地点を撮影可能な位置である第2種の車載システムに前記観測地点の撮影を依頼することを特徴とする遠隔地点観測システム。
【図1】


【図2】

【図4】
【図5】
【図3】
【図2】
【図4】
【図5】
【図3】
【公開番号】特開2006−31583(P2006−31583A)
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願番号】特願2004−212523(P2004−212523)
【出願日】平成16年7月21日(2004.7.21)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
【公開日】平成18年2月2日(2006.2.2)
【国際特許分類】
【出願日】平成16年7月21日(2004.7.21)
【出願人】(000101732)アルパイン株式会社 (2,424)
【Fターム(参考)】
[ Back to top ]