
車載システム
【課題】衝突によって車載装置が故障した場合でも処理を継続可能な車載システムを提供する。
【解決手段】車両内の離れた位置に設置された第1および第2の車載コンピュータと、衝突を検知する衝突検知手段を有する車載システムにおいて、第1および第2の車載コンピュータで分散処理システムを構築する。そして、第1の車載コンピュータがプログラムを実行しているときに、衝突検知手段によって衝突が検知され第1の車載コンピュータが破損するおそれがある場合には、実行中のプログラムが分散処理システムによって第2のコンピュータに移送される。移送されたプログラムは、第2のコンピュータによって継続して実行されるため、衝突によって第1のコンピュータが破損した場合でもあっても、プログラムの実行が中断されることなく続行することができる。
【解決手段】車両内の離れた位置に設置された第1および第2の車載コンピュータと、衝突を検知する衝突検知手段を有する車載システムにおいて、第1および第2の車載コンピュータで分散処理システムを構築する。そして、第1の車載コンピュータがプログラムを実行しているときに、衝突検知手段によって衝突が検知され第1の車載コンピュータが破損するおそれがある場合には、実行中のプログラムが分散処理システムによって第2のコンピュータに移送される。移送されたプログラムは、第2のコンピュータによって継続して実行されるため、衝突によって第1のコンピュータが破損した場合でもあっても、プログラムの実行が中断されることなく続行することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載システムに関し、特に車両が衝突しても車載コンピュータによって行われる処理を継続可能な車載システムに関する。
【背景技術】
【0002】
従来、走行中の車両の状態を記録するドライブレコーダ(走行記録装置)が知られている。ドライブレコーダは、アクセル操作やブレーキ操作やハンドル操作など運転操作に関する情報や車両の状態や前方の映像などを記録する。このような情報が収集されていると、事故発生時にその原因の解明が容易となる。
【0003】
このようにドライブレコーダによって記録された事故発生前後の情報は重要である。しかし、ドライブレコーダが必要となる場面は事故発生時であるため、事故が発生した際にドライブレコーダが故障しないことが必要である。特に、事故発生後の情報を記録するためには、ドライブレコーダが事故による衝撃によっても故障せずに作動を続ける必要がある。
【0004】
ドライブレコーダの対故障性を向上させるため、複数のハードディスク装置に走行情報を記録する技術が知られている(特許文献1)。また、データを、複数のハードディスク装置に冗長性を持たせて記録するRAID(Redundant Arrays of Inexpensive Disks)
という技術も知られている。RAIDシステムとして、1台のコンピュータの内部に設置された複数のハードディスク装置を使用する方法や、ネットワーク越しに設置された複数のハードディスク装置を使用する方法が知られている(非特許文献1)。
【特許文献1】特開2005−178449号公報
【特許文献2】特開2005−128671号公報
【非特許文献1】松本 尚、「ネットワークRAIDファイルシステム」、ITX2002 Summer 論文集、情報処理振興事業会、2002年6月
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のような従来技術の場合には、下記のような問題が生じていた。すなわち、上記の従来技術では複数のハードディスク装置のうちの一部が故障した場合には、正常動作しているハードディスク装置からデータを復旧することができるものの、ドライブレコーダ自体が故障した場合には、走行情報を記録することができなくなってしまう。
【0006】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、衝突によって車載装置が故障した場合でも処理を継続可能な車載システムを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係る車載システムは以下の構成を取る。すなわち、本発明に係る車載システムは、第1および第2の車載コンピュータと、衝突を検知する衝突検知手段を有する。第1および第2の車載コンピュータは、それぞれ、プログラムを実行することによって車両に係る処理を実行することができる。第1および第2の車載コンピュータは車両内において離れた位置に設置されている。また、第1および第2の車載コンピュータは、分散処理システムを構成していることが好ましい。分散処理システムとは、複数のコンピュータから構成され、システム内に投入されたプログラム(タスクともいう)が、それら複数のコンピュータのいずれかによって実行されるシステムである。そ
して、分散処理システムでは、複数のコンピュータのうちどのコンピュータによってそのプログラムが実行されても同様の結果が得られる。
【0008】
そして、本発明に係る車載システムは、第1の車載コンピュータがプログラムを実行しているときに、衝突検知手段によって衝突が検知された場合には、第1の車載コンピュータが実行しているプログラムが第2の車載コンピュータに移送される。ここで、移送(マイグレーションまたはプロセスマイグレーション)とは、あるコンピュータで実行中のプログラム(タスクやプロセスと呼ぶこともできる)を、無停止で稼働状態のまま、別のコンピュータに転送することをいう。転送先のコンピュータで実行を続行できるように、プログラムコード(命令コード)だけでなく、実行中のプログラムの状態(レジスタやスタックやヒープなどの状態)なども含めて実行中のプロセスに係る全てのメモリを他のコンピュータに転送する。転送先のコンピュータでは、転送元のコンピュータによってすでに実行された命令の次の命令から、プログラムの実行を継続することができる。
【0009】
このように、第1の車載コンピュータによって実行されていた処理が、第2の車載コンピュータによって実行されるため、衝突によって第1の車載コンピュータが故障した場合であっても、その処理の実行を継続することができる。
【0010】
なお、第1の車載コンピュータと第2の車載コンピュータは、衝突による影響が異なる場所に配置することが好ましい。そして、第1の車載コンピュータの動作に悪影響を及ぼす衝突が検知されたときに、第1の車載コンピュータで実行中のプログラムを第2の車載コンピュータに移送することが好適である。より具体的には、第1の車載コンピュータを車両の前方に配置し、第2の車載コンピュータを車両の後方に配置し、プログラムの移送は車両前方からの衝突(前突)が検知されたときに行うことが好ましい。あるいは、第1の車載コンピュータを車両の後方に配置し、第2の車載コンピュータを車両の前方に配置し、プログラムの移送は車両後方からの衝突(後突)が検知されたときに行うことが好ましい。このような構成によれば、衝突が発生してからその衝撃によって第1の車載コンピュータが故障する前に、プログラムを第1の車載コンピュータから第2の車載コンピュータに移送して、そのプログラムの実行を継続することができる。すなわち、衝突によってもプログラムの実行が中断されなくなる。
【0011】
なお、本車載システムで移送されるプログラムは、衝突発生後も実行を継続する必要がある処理を実行するプログラムであることが好ましい。そのような処理の例としては、車両の運転状況を記録する走行記録処理(ドライブレコーダ)や、事故の発生を位置とともに通報する緊急通知処理などを挙げることができる。もっとも、移送されるプログラムが行う処理は、その他どのようなものであっても構わない。
【発明の効果】
【0012】
本発明によれば、衝突によって車載装置が故障した場合でも処理を継続することが可能となる。
【発明を実施するための最良の形態】
【0013】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0014】
<構成>
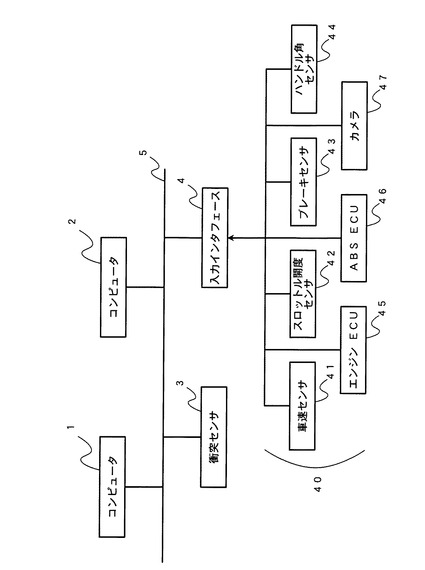
本実施形態に係る車載システムは、車両の走行状態を記録するシステムであって、衝突によって一部の装置に故障が発生しても走行状態を記録し続けることが可能な車載システムである。図1は、本実施形態に係る車載システムのハードウェア構成を示す図である。
【0015】
本実施形態に係る車載システムは、2台の車載コンピュータ1,2と衝突センサ3と走
行情報センサ群40からの情報を受け付ける入力インタフェース4と、から構成される。また、これらの各装置は車内LAN5によって接続されている。
【0016】
本実施形態に係る車載システムでは、通常時(衝突を検知する前)は、コンピュータ1が走行状態を記録するプログラムを実行して、走行状態に関する記録をハードディスク装置などの記憶装置に記録する。通常時は、コンピュータ2は走行状態記録に係る処理は行っていない。コンピュータ2は、通常時には他の処理のために使用されていても良く、使用されていなくても良い。なお、コンピュータ1および2は、後述するように分散処理システムを構成するため、同じ種類のCPUやメモリなどを用いて構成しておくことが好ましい。
【0017】
なお、コンピュータ1とコンピュータ2は、衝突による影響が異なる位置に配置することが好ましい。すなわち、衝突によって両方のコンピュータが同時に故障しないような位置に配置することが好ましい。具体的には、コンピュータ1を車両前方に配置し、コンピュータ2を車両後方に配置する。
【0018】
衝突センサ3は、車両に加えられた衝撃から衝突の発生を検知する。衝突センサ3は、所定の閾値以上の加速度が計測されたときに、衝突が発生したと検知する。なお、衝突センサ3は、衝撃の波形からその衝突が前方からの衝突(前突)であるのか、後方からの衝突(後突)であるのかなどを判断することができる。衝突センサ3が衝突を検知した場合には、車内LAN5を介して、コンピュータ1,2に通知される。
【0019】
入力インタフェース4は、走行情報センサ群40から走行状態に関する情報(走行情報)の入力を受け付ける。走行情報センサ群40は、例えば、車速センサ41、スロットル開度センサ42、ブレーキセンサ43、ハンドル角センサ44、エンジンECU(Electronic Control Unit)45、ABS(Anti-lock Break System)−ECU46、カメラ4
7などから構成される。
【0020】
車速センサ41は、スピードメータに入力される信号を検出して車両の速度を検出する。スロットル開度センサ42は、スロットルバルブの開度センサからの出力信号によって、アクセルの踏み込み度合いを検出する。ブレーキセンサ43は、ブレーキの踏み込み度合いを検出する。ハンドル角センサ44は、ハンドルの切れ角を検出する。エンジンECU45は、エンジンを制御するとともに、エンジンの制御状態を出力する。ABS−ECU46は、ABS装置を制御するとともに、ABS装置の制御状態を出力する。カメラ47は、車両前方の映像を定期的に撮影し出力する。
【0021】
これら、走行情報センサ群40から入力インタフェース4に入力された走行状態に関する情報は、入力インタフェース4から車内LAN5を介して、コンピュータ1,2に通知される。
【0022】
なお、衝突センサ3や入力インタフェース4からの情報は、車内LAN5を介さずに、コンピュータ1,2にケーブルなどによって直接入力される構成を取っても構わない。
【0023】
<走行記録装置>
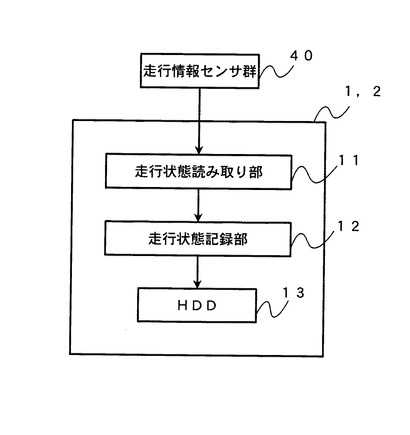
上述したように、コンピュータ1,2は走行状態を記録するプログラムを実行することによって、走行状態記録に係る処理を実行する。図2には、走行状態記録に係る処理を実行する際のコンピュータ1,2の機能ブロックを示す図である。以下では、走行状態記録に係る処理を実行しているコンピュータ1,2のことを走行記録装置とも呼ぶ。
【0024】
図2に示すように、走行記録装置は、走行情報センサ群40からの走行情報を走行状態
読み取り部11によって読み取る。具体的には、走行状態読み取り部11は、入力インタフェース4から車内LAN5を介して送信される走行情報を取得する。読み取られた走行情報は、走行状態記録部12によってハードディスク装置(HDD)13に記録される。本実施形態では、ハードディスク装置13として走行記録装置に内蔵のものを使用する。なお、ハードディスク装置13はRAIDなどによって冗長化されている。また、走行情報の記録先は、内蔵のハードディスク装置13ではなく、車内LAN5に接続された外部の記憶装置であっても構わない。
【0025】
走行記録装置は、このように走行情報センサ群40から取得される走行状態に関する情報を継続的に記録する。ここで、走行記録装置は記憶容量に限りがあるので、最新の情報のみを保持する。例えば、10分前までの走行状態情報を保持するようにする。そして、衝突センサ3によって衝突が検知された場合は、所定の時間(例えば3分間)だけさらに走行状態情報の記録を続け、この所定時間の経過後記録を停止する。これにより、衝突が発生する前後の走行記録情報を記録することが可能となる。上記の例であれば、衝突発生前の記録が7分間であり、衝突発生後の記録が3分間となる。
【0026】
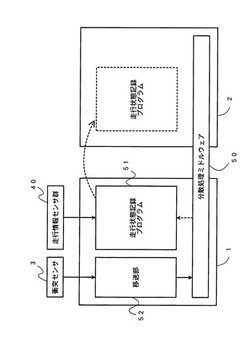
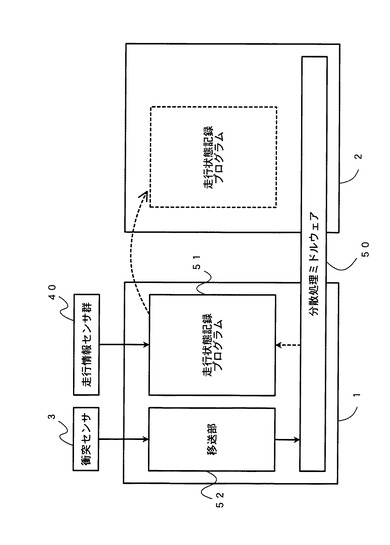
<分散処理システムおよび移送>
次に、本実施形態におけるコンピュータ1,2から構成される分散処理システムについて説明する。図3は、コンピュータ1,2から構成される分散処理システムの概略を示す図である。本実施形態におけるコンピュータ1,2は、それぞれ分散処理ミドルウェア50を実行しており、分散処理システムを構成している。分散処理システムは、システム内に投入されたアプリケーションプログラムをいずれかのコンピュータで実行する。そして、あるコンピュータにおいて実行中のプログラム(プロセス)を、別のコンピュータに移送してその別のコンピュータによって処理が行われるようにすることができる。この際、移送先のコンピュータでは、移送前までに行われた処理の次の処理から実行を行うことができる。プログラムの移送完了後にはもとのコンピュータが起動しているか否かは、プログラムの実行に対して影響を与えない。すなわち、本実施形態における分散処理システムでは、プログラムの実行中に、そのプログラムを実行するコンピュータを切り替えることができる。
【0027】
プログラムの移送では、実行中のプログラム(プロセス)に係るメモリの全てを他のコンピュータに転送するが、単にコピーしただけでは移送したプロセスで利用するリソースが移送先のコンピュータで既に利用されており競合を起こすおそれがある。そこで、分散処理ミドルウェア50は、競合が発生した場合は、同じリソースを使うことを回避し、移送先で正しくプロセスが動作する制御を行っている。
【0028】
本実施形態に係る車載システムにおいては、通常時(衝突が発生していない状態)は、コンピュータ1において走行状態記録プログラム51が実行される。なお、走行状態記録プログラム51は上記で説明したように、走行情報センサ群40から走行情報を取得しハードディスク装置13に記録するプログラムである。この走行状態記録プログラム51は、コンピュータ1において実行されるよう指定されるので、通常時には必ず走行情報を記録する処理はコンピュータ1によって実行される。
【0029】
また、本実施形態における車載システムにおいては、コンピュータ1上で走行状態記録プログラム51の移送を制御する移送部52が実行される。移送部52は、衝突センサ3から衝突が発生したことを通知されたときに、分散処理ミドルウェア50に対して、走行状態記録プログラム51を移送するよう通知する。走行状態記録プログラム51はコンピュータ2上に移送され、コンピュータ2によって走行情報を記録する処理が継続して実行される。なお、コンピュータ2に走行状態記録プログラム51を移送する際に、コンピュータ2上で他のプログラムが実行されている場合には、そのプログラムの実行を停止した
り、そのプログラムを他のコンピュータに移送したりする制御を行っても良い。
【0030】
<動作例>
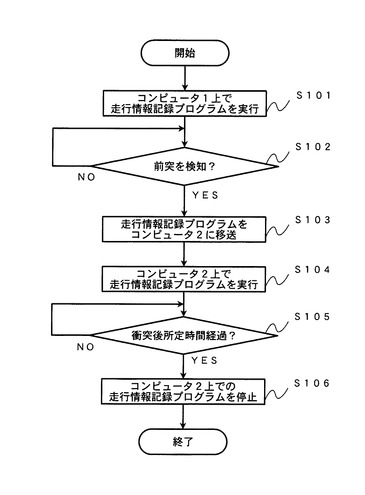
次に、図4のフローチャートを用いて本実施形態に係る車載システムの動作例を説明する。本実施形態に係る車載システムは、まずコンピュータ1上で走行状態記録プログラム51を実行する(S101)。次に、衝突センサ3によって衝突を検知したか否かを判定する(S102)。なお、上述したように、本実施形態においては、コンピュータ1を車両前方に配置し、コンピュータ2を車両後方に配置している。したがって、S102ではコンピュータ1が破損するおそれのある前突を検知の対象とする。前突が発生した場合(S102−YES)は、移送部52が分散処理ミドルウェア50に対して、走行状態記録プログラム51をコンピュータ2に移送するように指示する(S103)。そして、分散処理ミドルウェア50によって走行状態記録プログラム51がコンピュータ2に移送され、コンピュータ2上で走行状態記録プログラム51の実行がされる(S104)。走行状態記録プログラム51の移送後、所定の時間経過したか判定し(S105)、経過した場合には、コンピュータ2上での走行状態記録プログラム51の実行を停止する(S106)。
【0031】
このように、走行状態記録プログラム51を実行しているコンピュータ1が損傷するおそれのある衝突が検知された場合に、走行状態記録プログラム51をコンピュータ2に移送することで、衝突後も走行状態記録プログラム51が継続して実行することが可能となる。すなわち、走行状態記録プログラム51を実行するコンピュータは、コンピュータ1からコンピュータ2に変更されているが、外部から見た場合、走行状態記録プログラム51は停止することなく実行が継続されることとなる。したがって、本実施形態に係る車載システムによれば、衝突発生後の走行状態情報もより確実に記録することができるようになる。
【0032】
<変形例>
本実施形態においては、コンピュータ1を車両の前方、コンピュータ2を車両の後方に配置する構成をとったが、コンピュータ1とコンピュータ2の配置を逆にして、コンピュータ1を車両後方、コンピュータ2を車両前方に配置するようにしても良い。この場合、移送部52は、後突を検知した場合に走行状態記録プログラムの移送を分散処理ミドルウェアに対して指示する。
【0033】
また、車載コンピュータの台数は2台に限られるものではない。3台以上の車載コンピュータを配置しておくことも好ましい。衝突を検知してプログラムを移送する場合には、衝突センサ3が検知した衝撃の波形からいずれの方向からの衝突であるか判定し、衝突による影響が最も少ないと推定されるコンピュータを移送先として選択することができる。また、各コンピュータにおける処理負荷を比較して最も処理負荷の低いコンピュータを移送先として選択しても良い。
【0034】
また、走行状態記録プログラムは分散処理システム上で実行されるプログラムの例示であって、その他のプログラムが実行されても良い。例えば、事故の発生をGPS装置から取得される位置情報とともにセンターに通報する緊急通報プログラムなどを対象として、本発明に係る車載システムを構築することができる。この場合、事故発生時に緊急通報プログラムを実行するコンピュータが衝突によって故障する場合であっても、プログラムが他のコンピュータに移送されるので確実にプログラムを実行することができる。また、移送されるプログラムとしては、その他どのようなプログラムであっても構わない。
【図面の簡単な説明】
【0035】
【図1】本実施形態に係る車載システムのハードウェア構成を示す図である。
【図2】走行記録装置の機能ブロックを示す図である。
【図3】分散処理システムの概略を示す図である。
【図4】本実施形態に係る車載システムの動作例を示すフローチャートである。
【符号の説明】
【0036】
1,2 コンピュータ
3 衝突センサ
4 入力インタフェース
40 走行情報センサ群
41 車速センサ
42 スロットル開度センサ
43 ブレーキセンサ
44 ハンドル角センサ
45 エンジンECU
46 ABS−ECU
47 カメラ
【技術分野】
【0001】
本発明は、車載システムに関し、特に車両が衝突しても車載コンピュータによって行われる処理を継続可能な車載システムに関する。
【背景技術】
【0002】
従来、走行中の車両の状態を記録するドライブレコーダ(走行記録装置)が知られている。ドライブレコーダは、アクセル操作やブレーキ操作やハンドル操作など運転操作に関する情報や車両の状態や前方の映像などを記録する。このような情報が収集されていると、事故発生時にその原因の解明が容易となる。
【0003】
このようにドライブレコーダによって記録された事故発生前後の情報は重要である。しかし、ドライブレコーダが必要となる場面は事故発生時であるため、事故が発生した際にドライブレコーダが故障しないことが必要である。特に、事故発生後の情報を記録するためには、ドライブレコーダが事故による衝撃によっても故障せずに作動を続ける必要がある。
【0004】
ドライブレコーダの対故障性を向上させるため、複数のハードディスク装置に走行情報を記録する技術が知られている(特許文献1)。また、データを、複数のハードディスク装置に冗長性を持たせて記録するRAID(Redundant Arrays of Inexpensive Disks)
という技術も知られている。RAIDシステムとして、1台のコンピュータの内部に設置された複数のハードディスク装置を使用する方法や、ネットワーク越しに設置された複数のハードディスク装置を使用する方法が知られている(非特許文献1)。
【特許文献1】特開2005−178449号公報
【特許文献2】特開2005−128671号公報
【非特許文献1】松本 尚、「ネットワークRAIDファイルシステム」、ITX2002 Summer 論文集、情報処理振興事業会、2002年6月
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、上記のような従来技術の場合には、下記のような問題が生じていた。すなわち、上記の従来技術では複数のハードディスク装置のうちの一部が故障した場合には、正常動作しているハードディスク装置からデータを復旧することができるものの、ドライブレコーダ自体が故障した場合には、走行情報を記録することができなくなってしまう。
【0006】
本発明は上記実情に鑑みてなされたものであって、その目的とするところは、衝突によって車載装置が故障した場合でも処理を継続可能な車載システムを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明に係る車載システムは以下の構成を取る。すなわち、本発明に係る車載システムは、第1および第2の車載コンピュータと、衝突を検知する衝突検知手段を有する。第1および第2の車載コンピュータは、それぞれ、プログラムを実行することによって車両に係る処理を実行することができる。第1および第2の車載コンピュータは車両内において離れた位置に設置されている。また、第1および第2の車載コンピュータは、分散処理システムを構成していることが好ましい。分散処理システムとは、複数のコンピュータから構成され、システム内に投入されたプログラム(タスクともいう)が、それら複数のコンピュータのいずれかによって実行されるシステムである。そ
して、分散処理システムでは、複数のコンピュータのうちどのコンピュータによってそのプログラムが実行されても同様の結果が得られる。
【0008】
そして、本発明に係る車載システムは、第1の車載コンピュータがプログラムを実行しているときに、衝突検知手段によって衝突が検知された場合には、第1の車載コンピュータが実行しているプログラムが第2の車載コンピュータに移送される。ここで、移送(マイグレーションまたはプロセスマイグレーション)とは、あるコンピュータで実行中のプログラム(タスクやプロセスと呼ぶこともできる)を、無停止で稼働状態のまま、別のコンピュータに転送することをいう。転送先のコンピュータで実行を続行できるように、プログラムコード(命令コード)だけでなく、実行中のプログラムの状態(レジスタやスタックやヒープなどの状態)なども含めて実行中のプロセスに係る全てのメモリを他のコンピュータに転送する。転送先のコンピュータでは、転送元のコンピュータによってすでに実行された命令の次の命令から、プログラムの実行を継続することができる。
【0009】
このように、第1の車載コンピュータによって実行されていた処理が、第2の車載コンピュータによって実行されるため、衝突によって第1の車載コンピュータが故障した場合であっても、その処理の実行を継続することができる。
【0010】
なお、第1の車載コンピュータと第2の車載コンピュータは、衝突による影響が異なる場所に配置することが好ましい。そして、第1の車載コンピュータの動作に悪影響を及ぼす衝突が検知されたときに、第1の車載コンピュータで実行中のプログラムを第2の車載コンピュータに移送することが好適である。より具体的には、第1の車載コンピュータを車両の前方に配置し、第2の車載コンピュータを車両の後方に配置し、プログラムの移送は車両前方からの衝突(前突)が検知されたときに行うことが好ましい。あるいは、第1の車載コンピュータを車両の後方に配置し、第2の車載コンピュータを車両の前方に配置し、プログラムの移送は車両後方からの衝突(後突)が検知されたときに行うことが好ましい。このような構成によれば、衝突が発生してからその衝撃によって第1の車載コンピュータが故障する前に、プログラムを第1の車載コンピュータから第2の車載コンピュータに移送して、そのプログラムの実行を継続することができる。すなわち、衝突によってもプログラムの実行が中断されなくなる。
【0011】
なお、本車載システムで移送されるプログラムは、衝突発生後も実行を継続する必要がある処理を実行するプログラムであることが好ましい。そのような処理の例としては、車両の運転状況を記録する走行記録処理(ドライブレコーダ)や、事故の発生を位置とともに通報する緊急通知処理などを挙げることができる。もっとも、移送されるプログラムが行う処理は、その他どのようなものであっても構わない。
【発明の効果】
【0012】
本発明によれば、衝突によって車載装置が故障した場合でも処理を継続することが可能となる。
【発明を実施するための最良の形態】
【0013】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0014】
<構成>
本実施形態に係る車載システムは、車両の走行状態を記録するシステムであって、衝突によって一部の装置に故障が発生しても走行状態を記録し続けることが可能な車載システムである。図1は、本実施形態に係る車載システムのハードウェア構成を示す図である。
【0015】
本実施形態に係る車載システムは、2台の車載コンピュータ1,2と衝突センサ3と走
行情報センサ群40からの情報を受け付ける入力インタフェース4と、から構成される。また、これらの各装置は車内LAN5によって接続されている。
【0016】
本実施形態に係る車載システムでは、通常時(衝突を検知する前)は、コンピュータ1が走行状態を記録するプログラムを実行して、走行状態に関する記録をハードディスク装置などの記憶装置に記録する。通常時は、コンピュータ2は走行状態記録に係る処理は行っていない。コンピュータ2は、通常時には他の処理のために使用されていても良く、使用されていなくても良い。なお、コンピュータ1および2は、後述するように分散処理システムを構成するため、同じ種類のCPUやメモリなどを用いて構成しておくことが好ましい。
【0017】
なお、コンピュータ1とコンピュータ2は、衝突による影響が異なる位置に配置することが好ましい。すなわち、衝突によって両方のコンピュータが同時に故障しないような位置に配置することが好ましい。具体的には、コンピュータ1を車両前方に配置し、コンピュータ2を車両後方に配置する。
【0018】
衝突センサ3は、車両に加えられた衝撃から衝突の発生を検知する。衝突センサ3は、所定の閾値以上の加速度が計測されたときに、衝突が発生したと検知する。なお、衝突センサ3は、衝撃の波形からその衝突が前方からの衝突(前突)であるのか、後方からの衝突(後突)であるのかなどを判断することができる。衝突センサ3が衝突を検知した場合には、車内LAN5を介して、コンピュータ1,2に通知される。
【0019】
入力インタフェース4は、走行情報センサ群40から走行状態に関する情報(走行情報)の入力を受け付ける。走行情報センサ群40は、例えば、車速センサ41、スロットル開度センサ42、ブレーキセンサ43、ハンドル角センサ44、エンジンECU(Electronic Control Unit)45、ABS(Anti-lock Break System)−ECU46、カメラ4
7などから構成される。
【0020】
車速センサ41は、スピードメータに入力される信号を検出して車両の速度を検出する。スロットル開度センサ42は、スロットルバルブの開度センサからの出力信号によって、アクセルの踏み込み度合いを検出する。ブレーキセンサ43は、ブレーキの踏み込み度合いを検出する。ハンドル角センサ44は、ハンドルの切れ角を検出する。エンジンECU45は、エンジンを制御するとともに、エンジンの制御状態を出力する。ABS−ECU46は、ABS装置を制御するとともに、ABS装置の制御状態を出力する。カメラ47は、車両前方の映像を定期的に撮影し出力する。
【0021】
これら、走行情報センサ群40から入力インタフェース4に入力された走行状態に関する情報は、入力インタフェース4から車内LAN5を介して、コンピュータ1,2に通知される。
【0022】
なお、衝突センサ3や入力インタフェース4からの情報は、車内LAN5を介さずに、コンピュータ1,2にケーブルなどによって直接入力される構成を取っても構わない。
【0023】
<走行記録装置>
上述したように、コンピュータ1,2は走行状態を記録するプログラムを実行することによって、走行状態記録に係る処理を実行する。図2には、走行状態記録に係る処理を実行する際のコンピュータ1,2の機能ブロックを示す図である。以下では、走行状態記録に係る処理を実行しているコンピュータ1,2のことを走行記録装置とも呼ぶ。
【0024】
図2に示すように、走行記録装置は、走行情報センサ群40からの走行情報を走行状態
読み取り部11によって読み取る。具体的には、走行状態読み取り部11は、入力インタフェース4から車内LAN5を介して送信される走行情報を取得する。読み取られた走行情報は、走行状態記録部12によってハードディスク装置(HDD)13に記録される。本実施形態では、ハードディスク装置13として走行記録装置に内蔵のものを使用する。なお、ハードディスク装置13はRAIDなどによって冗長化されている。また、走行情報の記録先は、内蔵のハードディスク装置13ではなく、車内LAN5に接続された外部の記憶装置であっても構わない。
【0025】
走行記録装置は、このように走行情報センサ群40から取得される走行状態に関する情報を継続的に記録する。ここで、走行記録装置は記憶容量に限りがあるので、最新の情報のみを保持する。例えば、10分前までの走行状態情報を保持するようにする。そして、衝突センサ3によって衝突が検知された場合は、所定の時間(例えば3分間)だけさらに走行状態情報の記録を続け、この所定時間の経過後記録を停止する。これにより、衝突が発生する前後の走行記録情報を記録することが可能となる。上記の例であれば、衝突発生前の記録が7分間であり、衝突発生後の記録が3分間となる。
【0026】
<分散処理システムおよび移送>
次に、本実施形態におけるコンピュータ1,2から構成される分散処理システムについて説明する。図3は、コンピュータ1,2から構成される分散処理システムの概略を示す図である。本実施形態におけるコンピュータ1,2は、それぞれ分散処理ミドルウェア50を実行しており、分散処理システムを構成している。分散処理システムは、システム内に投入されたアプリケーションプログラムをいずれかのコンピュータで実行する。そして、あるコンピュータにおいて実行中のプログラム(プロセス)を、別のコンピュータに移送してその別のコンピュータによって処理が行われるようにすることができる。この際、移送先のコンピュータでは、移送前までに行われた処理の次の処理から実行を行うことができる。プログラムの移送完了後にはもとのコンピュータが起動しているか否かは、プログラムの実行に対して影響を与えない。すなわち、本実施形態における分散処理システムでは、プログラムの実行中に、そのプログラムを実行するコンピュータを切り替えることができる。
【0027】
プログラムの移送では、実行中のプログラム(プロセス)に係るメモリの全てを他のコンピュータに転送するが、単にコピーしただけでは移送したプロセスで利用するリソースが移送先のコンピュータで既に利用されており競合を起こすおそれがある。そこで、分散処理ミドルウェア50は、競合が発生した場合は、同じリソースを使うことを回避し、移送先で正しくプロセスが動作する制御を行っている。
【0028】
本実施形態に係る車載システムにおいては、通常時(衝突が発生していない状態)は、コンピュータ1において走行状態記録プログラム51が実行される。なお、走行状態記録プログラム51は上記で説明したように、走行情報センサ群40から走行情報を取得しハードディスク装置13に記録するプログラムである。この走行状態記録プログラム51は、コンピュータ1において実行されるよう指定されるので、通常時には必ず走行情報を記録する処理はコンピュータ1によって実行される。
【0029】
また、本実施形態における車載システムにおいては、コンピュータ1上で走行状態記録プログラム51の移送を制御する移送部52が実行される。移送部52は、衝突センサ3から衝突が発生したことを通知されたときに、分散処理ミドルウェア50に対して、走行状態記録プログラム51を移送するよう通知する。走行状態記録プログラム51はコンピュータ2上に移送され、コンピュータ2によって走行情報を記録する処理が継続して実行される。なお、コンピュータ2に走行状態記録プログラム51を移送する際に、コンピュータ2上で他のプログラムが実行されている場合には、そのプログラムの実行を停止した
り、そのプログラムを他のコンピュータに移送したりする制御を行っても良い。
【0030】
<動作例>
次に、図4のフローチャートを用いて本実施形態に係る車載システムの動作例を説明する。本実施形態に係る車載システムは、まずコンピュータ1上で走行状態記録プログラム51を実行する(S101)。次に、衝突センサ3によって衝突を検知したか否かを判定する(S102)。なお、上述したように、本実施形態においては、コンピュータ1を車両前方に配置し、コンピュータ2を車両後方に配置している。したがって、S102ではコンピュータ1が破損するおそれのある前突を検知の対象とする。前突が発生した場合(S102−YES)は、移送部52が分散処理ミドルウェア50に対して、走行状態記録プログラム51をコンピュータ2に移送するように指示する(S103)。そして、分散処理ミドルウェア50によって走行状態記録プログラム51がコンピュータ2に移送され、コンピュータ2上で走行状態記録プログラム51の実行がされる(S104)。走行状態記録プログラム51の移送後、所定の時間経過したか判定し(S105)、経過した場合には、コンピュータ2上での走行状態記録プログラム51の実行を停止する(S106)。
【0031】
このように、走行状態記録プログラム51を実行しているコンピュータ1が損傷するおそれのある衝突が検知された場合に、走行状態記録プログラム51をコンピュータ2に移送することで、衝突後も走行状態記録プログラム51が継続して実行することが可能となる。すなわち、走行状態記録プログラム51を実行するコンピュータは、コンピュータ1からコンピュータ2に変更されているが、外部から見た場合、走行状態記録プログラム51は停止することなく実行が継続されることとなる。したがって、本実施形態に係る車載システムによれば、衝突発生後の走行状態情報もより確実に記録することができるようになる。
【0032】
<変形例>
本実施形態においては、コンピュータ1を車両の前方、コンピュータ2を車両の後方に配置する構成をとったが、コンピュータ1とコンピュータ2の配置を逆にして、コンピュータ1を車両後方、コンピュータ2を車両前方に配置するようにしても良い。この場合、移送部52は、後突を検知した場合に走行状態記録プログラムの移送を分散処理ミドルウェアに対して指示する。
【0033】
また、車載コンピュータの台数は2台に限られるものではない。3台以上の車載コンピュータを配置しておくことも好ましい。衝突を検知してプログラムを移送する場合には、衝突センサ3が検知した衝撃の波形からいずれの方向からの衝突であるか判定し、衝突による影響が最も少ないと推定されるコンピュータを移送先として選択することができる。また、各コンピュータにおける処理負荷を比較して最も処理負荷の低いコンピュータを移送先として選択しても良い。
【0034】
また、走行状態記録プログラムは分散処理システム上で実行されるプログラムの例示であって、その他のプログラムが実行されても良い。例えば、事故の発生をGPS装置から取得される位置情報とともにセンターに通報する緊急通報プログラムなどを対象として、本発明に係る車載システムを構築することができる。この場合、事故発生時に緊急通報プログラムを実行するコンピュータが衝突によって故障する場合であっても、プログラムが他のコンピュータに移送されるので確実にプログラムを実行することができる。また、移送されるプログラムとしては、その他どのようなプログラムであっても構わない。
【図面の簡単な説明】
【0035】
【図1】本実施形態に係る車載システムのハードウェア構成を示す図である。
【図2】走行記録装置の機能ブロックを示す図である。
【図3】分散処理システムの概略を示す図である。
【図4】本実施形態に係る車載システムの動作例を示すフローチャートである。
【符号の説明】
【0036】
1,2 コンピュータ
3 衝突センサ
4 入力インタフェース
40 走行情報センサ群
41 車速センサ
42 スロットル開度センサ
43 ブレーキセンサ
44 ハンドル角センサ
45 エンジンECU
46 ABS−ECU
47 カメラ
【特許請求の範囲】
【請求項1】
車両内の離れた位置に設置された第1および第2の車載コンピュータと、
衝突を検知する衝突検知手段と、
を有する車載システムであって、
前記第1の車載コンピュータがプログラムを実行しているときに、前記衝突検知手段によって衝突が検知された場合には、前記第1のコンピュータによって実行中の前記プログラムが前記第2の車載コンピュータに移送され、該プログラムの実行は前記第2のコンピュータによって継続される
ことを特徴とする車載システム。
【請求項2】
前記第1の車載コンピュータは車両の前方に配置され、
前記第2の車載コンピュータは車両の後方に配置され、
前記第1の車載コンピュータから前記第2の車載コンピュータへのプログラムの移送は、前突が検知された場合に行われる
ことを特徴とする請求項1に記載の車載システム。
【請求項3】
前記第1の車載コンピュータは車両の後方に配置され、
前記第2の車載コンピュータは車両の前方に配置され、
前記第1の車載コンピュータから前記第2の車載コンピュータへのプログラムの移送は、後突が検知された場合に行われる
ことを特徴とする請求項1に記載の車載システム。
【請求項4】
前記移送されるプログラムは、車両の走行状態を記録するためのプログラムであることを特徴とする請求項1〜3のいずれかに記載の車載システム。
【請求項1】
車両内の離れた位置に設置された第1および第2の車載コンピュータと、
衝突を検知する衝突検知手段と、
を有する車載システムであって、
前記第1の車載コンピュータがプログラムを実行しているときに、前記衝突検知手段によって衝突が検知された場合には、前記第1のコンピュータによって実行中の前記プログラムが前記第2の車載コンピュータに移送され、該プログラムの実行は前記第2のコンピュータによって継続される
ことを特徴とする車載システム。
【請求項2】
前記第1の車載コンピュータは車両の前方に配置され、
前記第2の車載コンピュータは車両の後方に配置され、
前記第1の車載コンピュータから前記第2の車載コンピュータへのプログラムの移送は、前突が検知された場合に行われる
ことを特徴とする請求項1に記載の車載システム。
【請求項3】
前記第1の車載コンピュータは車両の後方に配置され、
前記第2の車載コンピュータは車両の前方に配置され、
前記第1の車載コンピュータから前記第2の車載コンピュータへのプログラムの移送は、後突が検知された場合に行われる
ことを特徴とする請求項1に記載の車載システム。
【請求項4】
前記移送されるプログラムは、車両の走行状態を記録するためのプログラムであることを特徴とする請求項1〜3のいずれかに記載の車載システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−24095(P2008−24095A)
【公開日】平成20年2月7日(2008.2.7)
【国際特許分類】
【出願番号】特願2006−197129(P2006−197129)
【出願日】平成18年7月19日(2006.7.19)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成20年2月7日(2008.2.7)
【国際特許分類】
【出願日】平成18年7月19日(2006.7.19)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]