
車載センサ、自動車用制御装置、自動車制御システム
【課題】車載センサと自動車用制御装置の間の伝送経路における影響により伝送波形が歪む場合でも、車載センサが送信した情報を精度よく復元する。
【解決手段】本発明に係る車載センサは、検出結果を時比率変調して生成したパルス波形の立ち上がりエッジと立ち下がりエッジを起点として立ち上がる1ショットパルスを、受信側へ送信する。
【解決手段】本発明に係る車載センサは、検出結果を時比率変調して生成したパルス波形の立ち上がりエッジと立ち下がりエッジを起点として立ち上がる1ショットパルスを、受信側へ送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載センサが検出した検出信号を自動車制御装置に送信し、その検出信号を復元する技術に関する。
【背景技術】
【0002】
従来、センサが検出した情報をパルス変調して送信する際には、下記特許文献1に記載されているように、パルス変調信号をそのまま伝送線路を通してセンサから制御装置に伝送している。また必要に応じて、下記特許文献2に記載されているような技術を用いて、ノイズ対策のため伝送波形を鈍らせる場合もある。
【0003】
下記特許文献3には、パルス幅変調と周波数変調を併用して情報を送信するセンサに関する技術が記載されている。下記特許文献4には、パルス長を用いて、同期パルスと情報パルスを区別する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平05−164583号公報
【特許文献2】特開平01−035218号公報
【特許文献3】特開2004−205283号公報
【特許文献4】特表平11−513231号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記各特許文献に記載されている技術では、伝送線路上における損失や、ノイズ対策のために波形を鈍らせることにより、伝送波形が歪み、送信したパルスのエッジ部分を受信側で誤検出する可能性がある。これにより、受信側において誤った時比率を認識し、情報を誤って解釈してしまう可能性がある。伝送線路の品質が比較的良好である場合であっても、電磁ノイズの放散を防止するために送信波形を意図的に鈍らせる必要が生じる場合があり、この場合は結果として上記と同様の課題が生じ得る。
本発明は、車載センサと自動車用制御装置の間の伝送経路における影響により伝送波形が歪む場合でも、車載センサが送信した情報を精度よく復元することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る車載センサは、検出結果を時比率変調して生成したパルス波形の立ち上がりエッジと立ち下がりエッジを起点として立ち上がる1ショットパルスを、受信側へ送信する。
【発明の効果】
【0007】
本発明に係る車載センサは、時比率変調パルスの立ち上がりエッジと立ち下がりエッジを1ショットパルスとして送信するので、車載センサと自動車用制御装置の間の伝送経路における影響により伝送波形が歪む場合でも、車載センサが送信した情報を精度よく復元できる。
【図面の簡単な説明】
【0008】
【図1】実施形態1に係る自動車制御システム100の構成図である。
【図2】図1に示す各信号の波形を示す図である。
【図3】図2の信号D4〜Q4までの詳細を示す図である。
【図4】実施形態2に係る自動車制御システム100の構成図である。
【図5】実施形態3に係る自動車制御システム100の構成図である。
【発明を実施するための形態】
【0009】
<実施の形態1>
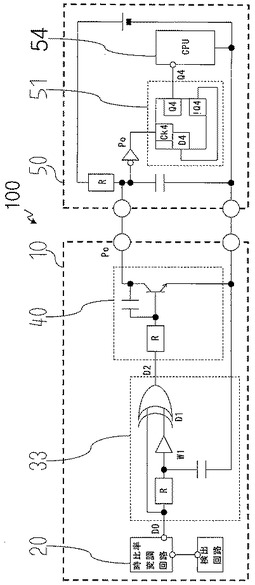
図1は、本発明の実施形態1に係る自動車制御システム100の構成図である。自動車制御システム100は、自動車を制御するためのシステムであり、車載センサ10、自動車用制御装置50を備える。
【0010】
車載センサ10は、自動車に搭載されたセンサであり、検出回路2、時比率変調回路20、1ショットパルス生成部30、出力信号送信部40を備える。1ショットパルス生成部30はさらに、立ち上がり1ショットパルス生成部31、立ち下がり1ショットパルス生成部32を備える。
【0011】
検出回路2は、車載センサ10が検出する対象である、当該自動車の物理パラメータ(例えば温度、流体流量、電圧、電流など)を検出する。時比率変調回路20は、検出回路2が検出した物理パラメータを時比率変調して時比率変調信号D0を生成する。
【0012】
立ち上がり1ショットパルス生成部31は、時比率変調信号D0の立ち上がりエッジを検出し、同時点において立ち上がる1ショットパルスQ1を生成する。立ち下がり1ショットパルス生成部32は、時比率変調信号D0の立ち下がりエッジを検出し、同時点において立ち上がる1ショットパルスQ2を生成する。ここでいう1ショットパルスとは、任意のパルス幅を有する単発のパルス(連続パルスではない)のことである。
【0013】
立ち上がり1ショットパルス生成部31と立ち下がり1ショットパルス生成部32がそれぞれ生成する1ショットパルスは、時比率変調信号D0の立ち上がりと立ち下がりをそれぞれ表しているので、これら1ショットパルスを用いて、時比率変調信号D0の立ち上がりから立ち下がりまで、すなわち時比率を表現することができる。立ち上がりと立ち下がりを区別し易くするため、立ち上がり1ショットパルス生成部31が生成する1ショットパルスのパルス幅と、立ち下がり1ショットパルス生成部32が生成する1ショットパルスのパルス幅は、互いに異なっていると受信側にとって便宜であるが、これに限られるものではない。具体例は後述の実施形態2で説明する。
【0014】
1ショットパルスQ1とQ2は、加算器によって加算され、加算信号D2として出力信号送信部40に入力される。出力信号送信部40は、加算信号D2を車載センサ10の出力信号Poとして、自動車用制御装置50に送信する。ノイズ対策などのため、必要に応じて、加算信号D2の波形を鈍らせる波形平滑化手段を設けてもよい。以下では加算信号D2を鈍らせることを前提とする。
【0015】
自動車用制御装置50は、車載センサ10が検出した物理パラメータを用いて自動車の動作を制御する装置であり、分周回路51、CPU(Central Processing Unit)54を備える。分周回路51はさらに、遅延回路52、ラッチ回路53を備える。
自動車用制御装置50は、適当な受信回路を用いて、車載センサ10が送信した出力信号Poを受信し、波形整形して信号D4を生成する。
【0016】
分周回路51は、信号D4を分周する。具体的には、自動車用制御装置50が出力信号Poを受信してから、遅延回路52によって生じる遅延時間だけ遅延した時刻において、ラッチ回路53がその時点における信号D4の値を取得する。ラッチ回路53は、信号D4の値を取得する毎に、出力信号Q4を反転させ、CPU54に出力する。出力信号Q4を次回反転させるまでの間の値は保持される。
CPU54は、出力信号Q4のパルス時比率に基づき、車載センサ10が送信した信号を復調することができる。
【0017】
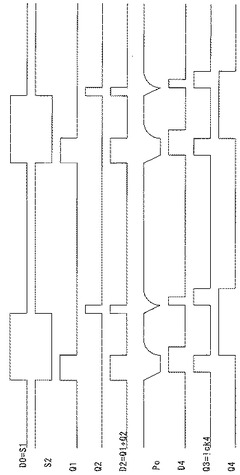
図2は、図1に示す各信号の波形を示す図である。信号D2は、時比率変調信号D0の立ち上がりエッジと立ち下がりエッジをそれぞれ表す1ショットパルスを含んでいる。出力信号Poは、波形平滑化手段または伝送経路の影響により、信号波形がひずんでいるものの、立ち上がりパルスから立ち下がりパルスまでの時間幅、すなわち時比率変調信号D0の時比率は保たれている。
【0018】
ラッチ回路53は、遅延回路52が出力する遅延信号Q3が立ち下がった時点で、信号D4の値を取得し、遅延信号Q3が次回立ち下がるまで保持する。遅延信号Q3は、自動車用制御装置50が出力信号Poを受信してから、所定の遅延時間だけ遅延した時点で立ち下がるので、立ち上がりパルスまたは立ち下がりパルスがそれぞれ立ち上がる時点と、ラッチ回路53が信号D4の値を取得する時点との間には、同遅延時間分だけの時間差があることになる。
【0019】
図2に示す波形例においては、遅延信号Q3が最初に立ち下がった時点ではD4はHiであるため、出力信号Q4はこの時点でHiになる。遅延信号Q3が次に立ち下がった時点ではD4はLoであるため、出力信号Q4はこの時点でLoになる。これらの間の時間帯における出力信号Q4の値は、ラッチ回路53内で保持される。
【0020】
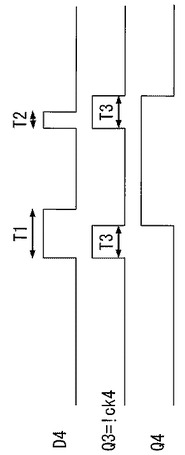
図3は、図2の信号D4〜Q4までの詳細を示す図である。立ち上がり1ショットパルス生成部31が生成するパルス幅T1、立ち下がり1ショットパルス生成部32が生成するパルス幅T2、遅延回路52が生じさせる遅延時間T3の関係は、T1>T3>T2となっている。すなわち、遅延時間T3の値は、各1ショットパルスのパルス時間幅の中間的な値になるようにセットされている。この理由について説明する。
【0021】
遅延信号Q3は、最終的な復調パルスである出力信号Q4をどの時点で立ち上げ、または立ち下げるかを指定する信号である。したがって、立ち上がりパルス(信号D4のうちQ1に相当する部分)が立ち上がってから立ち下がるまでの間にHiレベルの信号D4を取得して出力信号Q4を立ち上げるため、T1>T3である必要がある。また、立ち下がりパルス(信号D4のうちQ2に相当する部分)がいったん立ち上がってから立ち下がった間もない時点で、Loレベルの信号D4を取得して出力信号Q4を立ち下げるため、T3>T2である必要がある。
【0022】
以上のようにして生成した出力信号D4は、遅延回路53の遅延時間分だけ位相がずれてはいるものの、立ち上がりパルスから立ち下がりパルスまでの間の時間幅は元の信号D0と同等に保たれているので、CPU54は正しい時比率復調信号を得ることができる。
【0023】
なお、上記が成立する前提として、立ち上がりパルスQ1と立ち下がりパルスQ2は、それぞれ等しい歪み特性で波形がひずんでいる必要がある。これらパルスの歪み方が異なると、これらパルス間の時間幅が元の信号D0の時比率とは異なるものとなってしまうからである。
【0024】
<実施の形態1:まとめ>
以上のように、本実施形態1に係る車載センサ10は、時比率変調信号D0の立ち上がりを示す1ショットパルスQ1と、立ち下がりを示す1ショットパルスQ2を、自動車用制御装置50に送信する。これにより、自動車用制御装置50は、1ショットパルスQ1とQ2を基準にして、遅延回路52の遅延時間分だけ遅延した時点で、時比率変調信号D0の立ち上がりと立ち下がりをそれぞれ復元することができる。これにより、伝送経路における波形歪みの影響を抑え、精度よい時比率伝送を実現することが可能となる。
【0025】
<実施の形態2>
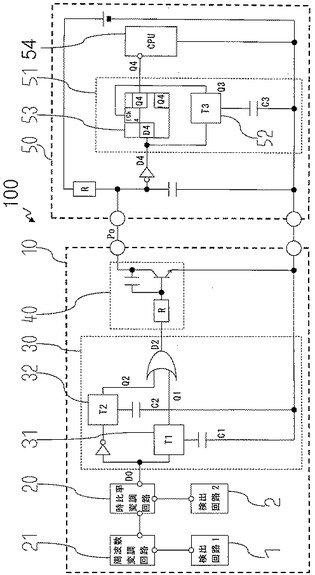
図4は、本発明の実施形態2に係る自動車制御システム100の構成図である。本実施形態2に係る自動車制御システム100は、実施形態1と構成が一部共通しているため、以下では実施形態1との差異点を中心に説明する。
【0026】
本実施形態2において、車載センサ10は、実施形態1で説明した1ショットパルス生成部30に代えて、エッジ検出部33を備える。エッジ検出部33は、時比率変調信号D0の立ち上がりエッジと立ち下がりエッジの双方を検出し、両者を区別しないエッジ検出パルスとして形成した信号D2を出力する。
【0027】
本実施形態2では、時比率変調信号D0の立ち上がりエッジと立ち下がりエッジを区別していないため、自動車用制御装置50は、これらを区別するための遅延回路52を備える必要はない。
【0028】
ラッチ回路53は、出力信号Poを受信する毎に、出力Q4を反転させてCPU54に出力する。そのため、出力Q4は、元の時比率変調信号D0と同じ波形、またはこれが位相反転した波形となる。CPU54は、動作開始から継続して出力Q4を監視することにより、出力Q4から元の時比率変調信号D0を復元することができる。
【0029】
なお、出力Q4が元の時比率変調信号D0から位相反転しているか否かを判定するためには、例えば車載センサ10が送信する出力信号Poは必ず時比率0%〜50%の範囲内とする旨を、車載センサ10と自動車用制御装置50の間で申し合わせておけばよい。この場合、例えば自動車用制御装置50が時比率60%の信号Q4を得たときは、時比率40%の出力信号Poが位相反転していると解することができる。同様に、出力信号Poは必ず時比率50%〜100%の範囲内とするように申し合わせてもよい。
【0030】
<実施の形態2:まとめ>
以上のように、本実施形態2に係る車載センサ10は、時比率変調信号D0の立ち上がりと立ち下がりを起点とする1ショットパルスを、自動車用制御装置50に送信する。これにより、実施形態1と同様の効果を発揮しつつ、車載センサ10と自動車用制御装置50の構成を簡易化することができる。
【0031】
また、本実施形態2において、出力信号Poの時比率範囲を車載センサ10と自動車用制御装置50の間で申し合わせておくことにより、復元した出力信号D4が時比率変調信号D0と同位相であるか反転位相であるかを判別することができる。
【0032】
<実施の形態3>
図5は、本発明の実施形態3に係る自動車制御システム100の構成図である。本実施形態2に係る自動車制御システム100は、実施形態1と構成が一部共通しているため、以下では実施形態1との差異点を中心に説明する。
【0033】
本実施形態3において、車載センサ10は、実施形態1で説明した構成に加えて、検出回路1、周波数変調回路21を備える。検出回路1は、当該自動車の物理パラメータを検出し、周波数変調回路21に出力する。検出回路1は、検出回路2と同じ物理パラメータを検出してもよいし、異なる物理パラメータを検出してもよい。
【0034】
周波数変調回路21は、検出回路1が検出した物理パラメータを周波数変調する。1ショットパルス生成部30に入力される信号D0は、その周波数が検出回路1の検出した物理パラメータに依存して変化し、その時比率が検出回路2の検出した物理パラメータに依存して変化する。
【0035】
CPU54は、出力信号Q4を受け取ると、実施形態1で説明した手順により時比率変調信号D0を復元する。また、周波数復調を実施して、周波数変調回路21が生成した変調信号を復調することができる。
【0036】
<実施の形態3:まとめ>
以上のように、本実施形態3によれば、実施形態1で説明した効果に加え、検出回路1が検出した物理パラメータを計測することができるので、より多くの情報を精度よく取得することができる。
なお、本実施形態3で説明した検出回路1と周波数変調回路21は、実施形態2においても用いることができる。
【0037】
以上、本発明者によってなされた発明を実施形態に基づき具体的に説明したが、本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることは言うまでもない。
【0038】
また、上記各構成、機能、処理部などは、それらの全部または一部を、例えば集積回路で設計することによりハードウェアとして実現することもできるし、プロセッサがそれぞれの機能を実現するプログラムを実行することによりソフトウェアとして実現することもできる。各機能を実現するプログラム、テーブルなどの情報は、メモリやハードディスクなどの記憶装置、ICカード、DVDなどの記憶媒体に格納することができる。
【符号の説明】
【0039】
1〜2:検出回路、10:車載センサ、20:時比率変調回路、21:周波数変調回路、30:1ショットパルス生成部、31:立ち上がり1ショットパルス生成部、32:立ち下がり1ショットパルス生成部、33:エッジ検出部、40:出力信号送信部、50:自動車用制御装置、51:分周回路、52:遅延回路、53:ラッチ回路、54:CPU。
【技術分野】
【0001】
本発明は、車載センサが検出した検出信号を自動車制御装置に送信し、その検出信号を復元する技術に関する。
【背景技術】
【0002】
従来、センサが検出した情報をパルス変調して送信する際には、下記特許文献1に記載されているように、パルス変調信号をそのまま伝送線路を通してセンサから制御装置に伝送している。また必要に応じて、下記特許文献2に記載されているような技術を用いて、ノイズ対策のため伝送波形を鈍らせる場合もある。
【0003】
下記特許文献3には、パルス幅変調と周波数変調を併用して情報を送信するセンサに関する技術が記載されている。下記特許文献4には、パルス長を用いて、同期パルスと情報パルスを区別する技術が記載されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平05−164583号公報
【特許文献2】特開平01−035218号公報
【特許文献3】特開2004−205283号公報
【特許文献4】特表平11−513231号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記各特許文献に記載されている技術では、伝送線路上における損失や、ノイズ対策のために波形を鈍らせることにより、伝送波形が歪み、送信したパルスのエッジ部分を受信側で誤検出する可能性がある。これにより、受信側において誤った時比率を認識し、情報を誤って解釈してしまう可能性がある。伝送線路の品質が比較的良好である場合であっても、電磁ノイズの放散を防止するために送信波形を意図的に鈍らせる必要が生じる場合があり、この場合は結果として上記と同様の課題が生じ得る。
本発明は、車載センサと自動車用制御装置の間の伝送経路における影響により伝送波形が歪む場合でも、車載センサが送信した情報を精度よく復元することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る車載センサは、検出結果を時比率変調して生成したパルス波形の立ち上がりエッジと立ち下がりエッジを起点として立ち上がる1ショットパルスを、受信側へ送信する。
【発明の効果】
【0007】
本発明に係る車載センサは、時比率変調パルスの立ち上がりエッジと立ち下がりエッジを1ショットパルスとして送信するので、車載センサと自動車用制御装置の間の伝送経路における影響により伝送波形が歪む場合でも、車載センサが送信した情報を精度よく復元できる。
【図面の簡単な説明】
【0008】
【図1】実施形態1に係る自動車制御システム100の構成図である。
【図2】図1に示す各信号の波形を示す図である。
【図3】図2の信号D4〜Q4までの詳細を示す図である。
【図4】実施形態2に係る自動車制御システム100の構成図である。
【図5】実施形態3に係る自動車制御システム100の構成図である。
【発明を実施するための形態】
【0009】
<実施の形態1>
図1は、本発明の実施形態1に係る自動車制御システム100の構成図である。自動車制御システム100は、自動車を制御するためのシステムであり、車載センサ10、自動車用制御装置50を備える。
【0010】
車載センサ10は、自動車に搭載されたセンサであり、検出回路2、時比率変調回路20、1ショットパルス生成部30、出力信号送信部40を備える。1ショットパルス生成部30はさらに、立ち上がり1ショットパルス生成部31、立ち下がり1ショットパルス生成部32を備える。
【0011】
検出回路2は、車載センサ10が検出する対象である、当該自動車の物理パラメータ(例えば温度、流体流量、電圧、電流など)を検出する。時比率変調回路20は、検出回路2が検出した物理パラメータを時比率変調して時比率変調信号D0を生成する。
【0012】
立ち上がり1ショットパルス生成部31は、時比率変調信号D0の立ち上がりエッジを検出し、同時点において立ち上がる1ショットパルスQ1を生成する。立ち下がり1ショットパルス生成部32は、時比率変調信号D0の立ち下がりエッジを検出し、同時点において立ち上がる1ショットパルスQ2を生成する。ここでいう1ショットパルスとは、任意のパルス幅を有する単発のパルス(連続パルスではない)のことである。
【0013】
立ち上がり1ショットパルス生成部31と立ち下がり1ショットパルス生成部32がそれぞれ生成する1ショットパルスは、時比率変調信号D0の立ち上がりと立ち下がりをそれぞれ表しているので、これら1ショットパルスを用いて、時比率変調信号D0の立ち上がりから立ち下がりまで、すなわち時比率を表現することができる。立ち上がりと立ち下がりを区別し易くするため、立ち上がり1ショットパルス生成部31が生成する1ショットパルスのパルス幅と、立ち下がり1ショットパルス生成部32が生成する1ショットパルスのパルス幅は、互いに異なっていると受信側にとって便宜であるが、これに限られるものではない。具体例は後述の実施形態2で説明する。
【0014】
1ショットパルスQ1とQ2は、加算器によって加算され、加算信号D2として出力信号送信部40に入力される。出力信号送信部40は、加算信号D2を車載センサ10の出力信号Poとして、自動車用制御装置50に送信する。ノイズ対策などのため、必要に応じて、加算信号D2の波形を鈍らせる波形平滑化手段を設けてもよい。以下では加算信号D2を鈍らせることを前提とする。
【0015】
自動車用制御装置50は、車載センサ10が検出した物理パラメータを用いて自動車の動作を制御する装置であり、分周回路51、CPU(Central Processing Unit)54を備える。分周回路51はさらに、遅延回路52、ラッチ回路53を備える。
自動車用制御装置50は、適当な受信回路を用いて、車載センサ10が送信した出力信号Poを受信し、波形整形して信号D4を生成する。
【0016】
分周回路51は、信号D4を分周する。具体的には、自動車用制御装置50が出力信号Poを受信してから、遅延回路52によって生じる遅延時間だけ遅延した時刻において、ラッチ回路53がその時点における信号D4の値を取得する。ラッチ回路53は、信号D4の値を取得する毎に、出力信号Q4を反転させ、CPU54に出力する。出力信号Q4を次回反転させるまでの間の値は保持される。
CPU54は、出力信号Q4のパルス時比率に基づき、車載センサ10が送信した信号を復調することができる。
【0017】
図2は、図1に示す各信号の波形を示す図である。信号D2は、時比率変調信号D0の立ち上がりエッジと立ち下がりエッジをそれぞれ表す1ショットパルスを含んでいる。出力信号Poは、波形平滑化手段または伝送経路の影響により、信号波形がひずんでいるものの、立ち上がりパルスから立ち下がりパルスまでの時間幅、すなわち時比率変調信号D0の時比率は保たれている。
【0018】
ラッチ回路53は、遅延回路52が出力する遅延信号Q3が立ち下がった時点で、信号D4の値を取得し、遅延信号Q3が次回立ち下がるまで保持する。遅延信号Q3は、自動車用制御装置50が出力信号Poを受信してから、所定の遅延時間だけ遅延した時点で立ち下がるので、立ち上がりパルスまたは立ち下がりパルスがそれぞれ立ち上がる時点と、ラッチ回路53が信号D4の値を取得する時点との間には、同遅延時間分だけの時間差があることになる。
【0019】
図2に示す波形例においては、遅延信号Q3が最初に立ち下がった時点ではD4はHiであるため、出力信号Q4はこの時点でHiになる。遅延信号Q3が次に立ち下がった時点ではD4はLoであるため、出力信号Q4はこの時点でLoになる。これらの間の時間帯における出力信号Q4の値は、ラッチ回路53内で保持される。
【0020】
図3は、図2の信号D4〜Q4までの詳細を示す図である。立ち上がり1ショットパルス生成部31が生成するパルス幅T1、立ち下がり1ショットパルス生成部32が生成するパルス幅T2、遅延回路52が生じさせる遅延時間T3の関係は、T1>T3>T2となっている。すなわち、遅延時間T3の値は、各1ショットパルスのパルス時間幅の中間的な値になるようにセットされている。この理由について説明する。
【0021】
遅延信号Q3は、最終的な復調パルスである出力信号Q4をどの時点で立ち上げ、または立ち下げるかを指定する信号である。したがって、立ち上がりパルス(信号D4のうちQ1に相当する部分)が立ち上がってから立ち下がるまでの間にHiレベルの信号D4を取得して出力信号Q4を立ち上げるため、T1>T3である必要がある。また、立ち下がりパルス(信号D4のうちQ2に相当する部分)がいったん立ち上がってから立ち下がった間もない時点で、Loレベルの信号D4を取得して出力信号Q4を立ち下げるため、T3>T2である必要がある。
【0022】
以上のようにして生成した出力信号D4は、遅延回路53の遅延時間分だけ位相がずれてはいるものの、立ち上がりパルスから立ち下がりパルスまでの間の時間幅は元の信号D0と同等に保たれているので、CPU54は正しい時比率復調信号を得ることができる。
【0023】
なお、上記が成立する前提として、立ち上がりパルスQ1と立ち下がりパルスQ2は、それぞれ等しい歪み特性で波形がひずんでいる必要がある。これらパルスの歪み方が異なると、これらパルス間の時間幅が元の信号D0の時比率とは異なるものとなってしまうからである。
【0024】
<実施の形態1:まとめ>
以上のように、本実施形態1に係る車載センサ10は、時比率変調信号D0の立ち上がりを示す1ショットパルスQ1と、立ち下がりを示す1ショットパルスQ2を、自動車用制御装置50に送信する。これにより、自動車用制御装置50は、1ショットパルスQ1とQ2を基準にして、遅延回路52の遅延時間分だけ遅延した時点で、時比率変調信号D0の立ち上がりと立ち下がりをそれぞれ復元することができる。これにより、伝送経路における波形歪みの影響を抑え、精度よい時比率伝送を実現することが可能となる。
【0025】
<実施の形態2>
図4は、本発明の実施形態2に係る自動車制御システム100の構成図である。本実施形態2に係る自動車制御システム100は、実施形態1と構成が一部共通しているため、以下では実施形態1との差異点を中心に説明する。
【0026】
本実施形態2において、車載センサ10は、実施形態1で説明した1ショットパルス生成部30に代えて、エッジ検出部33を備える。エッジ検出部33は、時比率変調信号D0の立ち上がりエッジと立ち下がりエッジの双方を検出し、両者を区別しないエッジ検出パルスとして形成した信号D2を出力する。
【0027】
本実施形態2では、時比率変調信号D0の立ち上がりエッジと立ち下がりエッジを区別していないため、自動車用制御装置50は、これらを区別するための遅延回路52を備える必要はない。
【0028】
ラッチ回路53は、出力信号Poを受信する毎に、出力Q4を反転させてCPU54に出力する。そのため、出力Q4は、元の時比率変調信号D0と同じ波形、またはこれが位相反転した波形となる。CPU54は、動作開始から継続して出力Q4を監視することにより、出力Q4から元の時比率変調信号D0を復元することができる。
【0029】
なお、出力Q4が元の時比率変調信号D0から位相反転しているか否かを判定するためには、例えば車載センサ10が送信する出力信号Poは必ず時比率0%〜50%の範囲内とする旨を、車載センサ10と自動車用制御装置50の間で申し合わせておけばよい。この場合、例えば自動車用制御装置50が時比率60%の信号Q4を得たときは、時比率40%の出力信号Poが位相反転していると解することができる。同様に、出力信号Poは必ず時比率50%〜100%の範囲内とするように申し合わせてもよい。
【0030】
<実施の形態2:まとめ>
以上のように、本実施形態2に係る車載センサ10は、時比率変調信号D0の立ち上がりと立ち下がりを起点とする1ショットパルスを、自動車用制御装置50に送信する。これにより、実施形態1と同様の効果を発揮しつつ、車載センサ10と自動車用制御装置50の構成を簡易化することができる。
【0031】
また、本実施形態2において、出力信号Poの時比率範囲を車載センサ10と自動車用制御装置50の間で申し合わせておくことにより、復元した出力信号D4が時比率変調信号D0と同位相であるか反転位相であるかを判別することができる。
【0032】
<実施の形態3>
図5は、本発明の実施形態3に係る自動車制御システム100の構成図である。本実施形態2に係る自動車制御システム100は、実施形態1と構成が一部共通しているため、以下では実施形態1との差異点を中心に説明する。
【0033】
本実施形態3において、車載センサ10は、実施形態1で説明した構成に加えて、検出回路1、周波数変調回路21を備える。検出回路1は、当該自動車の物理パラメータを検出し、周波数変調回路21に出力する。検出回路1は、検出回路2と同じ物理パラメータを検出してもよいし、異なる物理パラメータを検出してもよい。
【0034】
周波数変調回路21は、検出回路1が検出した物理パラメータを周波数変調する。1ショットパルス生成部30に入力される信号D0は、その周波数が検出回路1の検出した物理パラメータに依存して変化し、その時比率が検出回路2の検出した物理パラメータに依存して変化する。
【0035】
CPU54は、出力信号Q4を受け取ると、実施形態1で説明した手順により時比率変調信号D0を復元する。また、周波数復調を実施して、周波数変調回路21が生成した変調信号を復調することができる。
【0036】
<実施の形態3:まとめ>
以上のように、本実施形態3によれば、実施形態1で説明した効果に加え、検出回路1が検出した物理パラメータを計測することができるので、より多くの情報を精度よく取得することができる。
なお、本実施形態3で説明した検出回路1と周波数変調回路21は、実施形態2においても用いることができる。
【0037】
以上、本発明者によってなされた発明を実施形態に基づき具体的に説明したが、本発明は前記実施の形態に限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能であることは言うまでもない。
【0038】
また、上記各構成、機能、処理部などは、それらの全部または一部を、例えば集積回路で設計することによりハードウェアとして実現することもできるし、プロセッサがそれぞれの機能を実現するプログラムを実行することによりソフトウェアとして実現することもできる。各機能を実現するプログラム、テーブルなどの情報は、メモリやハードディスクなどの記憶装置、ICカード、DVDなどの記憶媒体に格納することができる。
【符号の説明】
【0039】
1〜2:検出回路、10:車載センサ、20:時比率変調回路、21:周波数変調回路、30:1ショットパルス生成部、31:立ち上がり1ショットパルス生成部、32:立ち下がり1ショットパルス生成部、33:エッジ検出部、40:出力信号送信部、50:自動車用制御装置、51:分周回路、52:遅延回路、53:ラッチ回路、54:CPU。
【特許請求の範囲】
【請求項1】
自動車に搭載される車載センサであって、
前記自動車を制御するために用いる物理パラメータを検出する検出部と、
前記検出部が検出した物理パラメータをパルス波形に変調する時比率変調部と、
前記時比率変調部が生成したパルス波形の立ち上がりエッジと立ち下がりエッジを起点として立ち上がる1ショットパルスを生成する1ショットパルス生成部と、
前記1ショットパルスを送信する送信部と、
を備えたことを特徴とする車載センサ。
【請求項2】
前記1ショットパルス生成部は、
立ち上がりエッジを検出したときに生成する前記1ショットパルスのパルス幅と、立ち下りエッジを検出したときに生成する前記1ショットパルスのパルス幅とを、互いに異なる幅にセットする
ことを特徴とする請求項1記載の車載センサ。
【請求項3】
前記送信部は、前記1ショットパルスの波形を鈍らせた上で送信する
ことを特徴とする請求項1または2記載の車載センサ。
【請求項4】
前記自動車を制御するために用いる物理パラメータを検出する第2検出部と、
前記検出部が検出した物理パラメータを周波数変調したパルス信号を生成する周波数変調部と、
を備えたことを特徴とする請求項1から3のいずれか1項記載の車載センサ。
【請求項5】
車載センサが送信した1ショットパルス信号を受信する受信部と、
前記受信部が受信した前記1ショットパルス信号を分周して値を取得する分周部と、
前記分周部が前記1ショットパルス信号を分周した結果に基づき前記車載センサが検出した物理パラメータを復元するプロセッサと、
を備え、
前記プロセッサは、
前記分周部が前記1ショットパルス信号を分周した時点において立ち上がり、または立ち下がるパルス信号を、前記車載センサが検出した物理パラメータを表すパルス信号として復元する
ことを特徴とする自動車用制御装置。
【請求項6】
前記車載センサが送信した1ショットパルス信号を前記受信部が受信してから前記分周部がその1ショットパルス信号を分周するまでの間に所定の遅延時間を生じさせる遅延部を備え、
前記受信部は、
前記車載センサが検出した物理パラメータを表すパルス信号の立ち上がりに対応する前記1ショットパルス信号と、前記パルス信号の立ち下がりに対応する前記1ショットパルス信号とを受信し、
前記遅延時間は、
前記パルス信号の立ち上がりに対応する前記1ショットパルス信号のパルス幅と、前記パルス信号の立ち下がりに対応する前記1ショットパルス信号のパルス幅との間の長さにセットされており、
前記プロセッサは、
前記車載センサが送信した1ショットパルス信号を前記受信部が受信してから前記遅延時間が経過した時点で前記分周部が分周した前記1ショットパルスが立ち上がっている場合は、前記復元するパルス信号をその時点において立ち上げ、
前記車載センサが送信した1ショットパルス信号を前記受信部が受信してから前記遅延時間が経過した時点で前記分周部が分周した前記1ショットパルスが立ち上がっていない場合は、前記復元するパルス信号をその時点において立ち下げる
ことを特徴とする請求項5記載の自動車用制御装置。
【請求項7】
前記受信部は、前記車載センサが送信する周波数変調された信号を受信し、
前記プロセッサは、前記周波数変調された信号を復調する
ことを特徴とする請求項5または6記載の自動車用制御装置。
【請求項8】
請求項1記載の車載センサと、
請求項5記載の自動車用制御装置と、
を備えたことを特徴とする自動車制御システム。
【請求項9】
請求項2記載の車載センサと、
請求項6記載の自動車用制御装置と、
を備えたことを特徴とする自動車制御システム。
【請求項1】
自動車に搭載される車載センサであって、
前記自動車を制御するために用いる物理パラメータを検出する検出部と、
前記検出部が検出した物理パラメータをパルス波形に変調する時比率変調部と、
前記時比率変調部が生成したパルス波形の立ち上がりエッジと立ち下がりエッジを起点として立ち上がる1ショットパルスを生成する1ショットパルス生成部と、
前記1ショットパルスを送信する送信部と、
を備えたことを特徴とする車載センサ。
【請求項2】
前記1ショットパルス生成部は、
立ち上がりエッジを検出したときに生成する前記1ショットパルスのパルス幅と、立ち下りエッジを検出したときに生成する前記1ショットパルスのパルス幅とを、互いに異なる幅にセットする
ことを特徴とする請求項1記載の車載センサ。
【請求項3】
前記送信部は、前記1ショットパルスの波形を鈍らせた上で送信する
ことを特徴とする請求項1または2記載の車載センサ。
【請求項4】
前記自動車を制御するために用いる物理パラメータを検出する第2検出部と、
前記検出部が検出した物理パラメータを周波数変調したパルス信号を生成する周波数変調部と、
を備えたことを特徴とする請求項1から3のいずれか1項記載の車載センサ。
【請求項5】
車載センサが送信した1ショットパルス信号を受信する受信部と、
前記受信部が受信した前記1ショットパルス信号を分周して値を取得する分周部と、
前記分周部が前記1ショットパルス信号を分周した結果に基づき前記車載センサが検出した物理パラメータを復元するプロセッサと、
を備え、
前記プロセッサは、
前記分周部が前記1ショットパルス信号を分周した時点において立ち上がり、または立ち下がるパルス信号を、前記車載センサが検出した物理パラメータを表すパルス信号として復元する
ことを特徴とする自動車用制御装置。
【請求項6】
前記車載センサが送信した1ショットパルス信号を前記受信部が受信してから前記分周部がその1ショットパルス信号を分周するまでの間に所定の遅延時間を生じさせる遅延部を備え、
前記受信部は、
前記車載センサが検出した物理パラメータを表すパルス信号の立ち上がりに対応する前記1ショットパルス信号と、前記パルス信号の立ち下がりに対応する前記1ショットパルス信号とを受信し、
前記遅延時間は、
前記パルス信号の立ち上がりに対応する前記1ショットパルス信号のパルス幅と、前記パルス信号の立ち下がりに対応する前記1ショットパルス信号のパルス幅との間の長さにセットされており、
前記プロセッサは、
前記車載センサが送信した1ショットパルス信号を前記受信部が受信してから前記遅延時間が経過した時点で前記分周部が分周した前記1ショットパルスが立ち上がっている場合は、前記復元するパルス信号をその時点において立ち上げ、
前記車載センサが送信した1ショットパルス信号を前記受信部が受信してから前記遅延時間が経過した時点で前記分周部が分周した前記1ショットパルスが立ち上がっていない場合は、前記復元するパルス信号をその時点において立ち下げる
ことを特徴とする請求項5記載の自動車用制御装置。
【請求項7】
前記受信部は、前記車載センサが送信する周波数変調された信号を受信し、
前記プロセッサは、前記周波数変調された信号を復調する
ことを特徴とする請求項5または6記載の自動車用制御装置。
【請求項8】
請求項1記載の車載センサと、
請求項5記載の自動車用制御装置と、
を備えたことを特徴とする自動車制御システム。
【請求項9】
請求項2記載の車載センサと、
請求項6記載の自動車用制御装置と、
を備えたことを特徴とする自動車制御システム。
【図1】



【図2】

【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−61722(P2013−61722A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−198493(P2011−198493)
【出願日】平成23年9月12日(2011.9.12)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月12日(2011.9.12)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]