
車載ナビゲーション装置、ナビゲーションシステム及びナビゲーション方法
【課題】各車両毎に固有の特性を反映した最適な走行経路の案内を行えるようにする。
【解決手段】走行中の自車両を制御するための車両制御信号に基づいて自車両が走行している道路の路面状況を検出し、検出した路面状況と、地図データに含まれる地図基本情報や自車両外部の情報サーバ装置から配信される外部情報とに基づいて、自車両が滑る可能性がある他の道路を検出して、走行不可能区間として認識する。
【解決手段】走行中の自車両を制御するための車両制御信号に基づいて自車両が走行している道路の路面状況を検出し、検出した路面状況と、地図データに含まれる地図基本情報や自車両外部の情報サーバ装置から配信される外部情報とに基づいて、自車両が滑る可能性がある他の道路を検出して、走行不可能区間として認識する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両内部の表示手段に地図を表示させながら車両の走行経路を案内する車載ナビゲーション装置、当該車載ナビゲーション装置を用いたナビゲーションシステム及びナビゲーション方法に関する。
【背景技術】
【0002】
従来から、地図の表示や音声によるガイダンスなどによって車両の走行経路を案内する車載ナビゲーション装置が普及している。また、近年では、単に所要時間の長短に基づいて設定された走行経路を案内するのではなく、自車両が安全に走行できる経路を設定して案内する技術も提案されている(例えば、特許文献1参照。)。
【0003】
具体的には、この特許文献1には、道路網のリンク及び車両が走行する道路の道路状況を予め設定された危険度に応じてリンク毎にランク付けした道路状況ランクを含む地図データを用いて、比較的安全な経路を自車両の走行経路として設定して案内を行う技術が開示されている。
【特許文献1】特開2004−205348号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した特許文献1をはじめとする従来の車載ナビゲーション装置においては、あくまで統計処理された情報に基づいて、安全な走行が可能と判断される走行経路を設定して案内を行うようにしており、各車両毎に固有の特性が反映されたものではなかった。そのため、従来の車載ナビゲーション装置においては、各車両毎の走行性能にあわせた走行経路の案内を行うことができず、必ずしも最適な走行経路の案内を行うことができないという問題があった。
【0005】
本発明は、以上のような従来の実情に鑑みて創案されたものであって、各車両毎に固有の特性を反映した最適な走行経路の案内を行うことができる車載ナビゲーション装置、ナビゲーションシステム及びナビゲーション方法を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明では、前記目的を達成するために、走行中の自車両を制御するための車両制御信号に基づいて、自車両が走行している道路の路面状況を検出している。そして、検出した自車両の走行道路の路面状況と、地図を表示するための地図データに含まれる地図基本情報とに基づいて、自車両が滑る可能性がある他の道路を検出して、当該道路を走行回避区間として認識するようにしている。このようにして認識された走行回避区間は、例えば、地図上で識別可能に表示手段に表示させることでドライバに認識させることができる。また、この走行回避区間を回避する経路を自車両の走行経路として設定することで、自車両の走行性能にあわせた最適な走行経路の案内を行うことができる。
【発明の効果】
【0007】
本発明によれば、実際に走行している車両の車両制御信号から路面状況が検出され、検出された路面状況と地図基本情報とに基づいて当該車両が滑る可能性がある他の道路が当該車両の走行回避区間として認識されるので、各車両毎に固有の特性を反映した最適な走行経路の案内を行うことができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の具体的な実施形態について、図面を参照しながら詳細に説明する。
【0009】
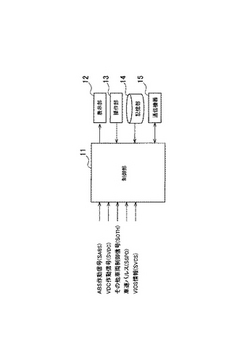
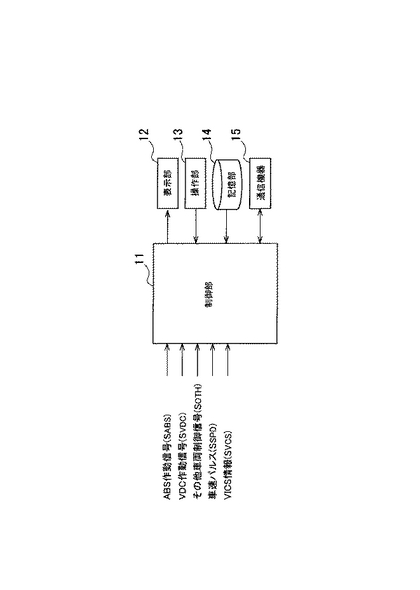
図1は、本実施形態の車載ナビゲーション装置の概略構成を示すブロック図である。この車載ナビゲーション装置は、車両に搭載されて車両の走行経路を案内するものであり、図1に示すように、各部を統括的に制御する制御部11と、液晶ディスプレイ等を用いた表示部12と、各種操作スイッチを有する操作部13と、表示部12に地図を表示させるための地図データを記憶する記憶部14とを備える。この車載ナビゲーション装置は、制御部11の制御のもとで、操作部13を介したユーザの操作に基づいて、記憶部14に記憶されている地図データを用いて地図を描画して表示部12に表示させながら、当該車載ナビゲーション装置が搭載された車両(自車両)の走行経路の案内を行う。ここで、記憶部14に記憶されている地図データには、走行経路の傾斜度を示す傾斜度情報や経緯度及び標高を示す経緯度・標高情報等も地図基本情報として含まれており、制御部11は、この地図データから、自車両の走行経路の傾斜度、経緯度及び標高等を把握することが可能となっている。
【0010】
また、特に本実施形態の車載ナビゲーション装置では、制御部11が、走行中の自車両を制御するための車両制御信号に基づいて、自車両が走行している道路の路面状況を検出する機能を有している。具体的には、制御部11には、自車両に搭載されるABS(Anti-Lock Brake System)システムからのABS作動信号SABSや、VDC(Vehicle Dynamics Control)システムからのVDC作動信号SVDC、さらには、自車両が横滑りしている旨を示す信号等のその他の車両制御信号SOTHが供給される。そして、制御部11は、これらの各種車両制御信号に基づいて、当該自車両に滑りが発生した旨を検出する。また、制御部11は、車速に応じて発生される車速パルス信号SSPDを読み込んで、この車速パルス信号SSPDに基づいて、自車両の加減速度を検出する。また、制御部11は、この検出した自車両の加減速度に基づいて、自車両が走行している道路の路面の滑りやすさを示す路面摩擦係数μを算出する。そして、制御部11は、算出した路面摩擦係数μに基づいて、自車両が滑ることなく走行可能な最大傾斜度を算出する。
【0011】
さらに、制御部11は、自車両外部からの外部情報を収集することも可能となっている。すなわち、本実施形態の車載ナビゲーション装置は、図示しないVICS(Vehicle Information and Communication System)センタに設置された情報サーバ装置から配信された電波ビーコン信号及び光ビーコン信号並びにFM(Frequency Modulation)多重放送からなるVICS情報SVCSを取得する機能を有しており、制御部11は、取得されたVICS情報SVCSに基づいて、走行予定経路の季節情報や天気予報情報等を収集する。さらにまた、制御部11は、いわゆるプローブカーによって収集されて所定の情報サーバ装置から配信された走行予定の地域情報等を、携帯電話機等の通信機器15を介して受信することによって収集することもできる。
【0012】
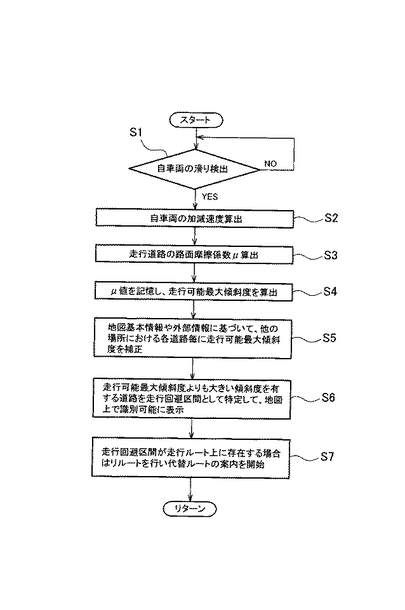
このような本実施形態の車載ナビゲーション装置は、制御部11の制御のもとで、図2に示すような一連の手順にしたがって、自車両の走行経路の案内を行う。
【0013】
まず、制御部11は、ステップS1において、車両制御信号に基づいて自車両に滑りが発生したことを検出すると、ステップS2において、自車両の加減速度を算出し、ステップS3において、算出した加減速度に基づいて、自車両が走行している道路の路面摩擦係数μを算出する。
【0014】
具体的には、制御部11は、例えばABS作動信号SABSが供給されることによって自車両に滑りが発生した旨を検出すると、そのときに得られた車速パルス信号SSPDにおけるパルス数の増減に基づいて加減速度を算出する。そして、制御部11は、算出した加減速度と重力加速度を用いて、路面摩擦係数μ=(加減速度)/(重力加速度)を算出する。また、制御部11は、VDC作動信号SVDCが供給されることによって自車両に滑りが発生した旨を検出した場合には、その車速パルス加減速度を活用することにより、路面摩擦係数μを算出する。なお、制御部11は、その他の各種車両制御信号SOTHに基づいて、路面摩擦係数μを推定するようにしてもよい。
【0015】
続いて、制御部11は、ステップS4において、算出した自車両の走行道路の路面摩擦係数μを内部メモリ等の記憶手段に記憶するとともに、この路面摩擦係数μに基づいて、自車両が滑ることなく走行可能な最大傾斜度を算出する。さらに、制御部11は、ステップS5において、例えば、自車両の走行道路の路面形状、地域情報、統計情報、季節情報、天気予報情報といった、記憶部14に記憶されている地図基本情報や外部の情報サーバ装置から取得した外部情報に基づいて、他の場所における各道路毎に、自車両が滑ることなく走行可能な最大傾斜度を補正する。すなわち、制御部11は、他の場所における各道路の滑りやすさをその路面の傾斜度を基本とするが、その場所の環境条件に応じて同じ傾斜度でも自車両の滑りやすさに差が生じるので、環境条件を特定可能な各種情報に基づいて、各道路毎に自車両が走行可能な最大傾斜度を補正する。
【0016】
具体的には、冬季の積雪や凍結等を要因として滑る可能性があると判定する場合には、路面形状としての標高を指標とした推定が可能である。したがって、制御部11は、自車両の現在地の標高よりも高い位置にある地域は滑る可能性が高い区間とし、傾斜度が小さい道路であっても滑る可能性があると判定する。すなわち、制御部11は、例えば100mあたりの温度降下を0.6℃として考え、自車両の走行道路(現在地)よりも標高が高い位置にある道路については、自車両が滑ることなく走行可能な最大傾斜度を温度降下に応じて小さい値に補正する。
【0017】
また、冬季の積雪や凍結等を要因として滑る可能性があると判定する場合には、地域情報としての緯度を指標とした推定も可能である。したがって、制御部11は、自車両の現在地よりも緯度が高い地域は滑る可能性が高い区間とし、傾斜度が小さい道路であっても滑る可能性があると判定する。すなわち、制御部11は、自車両の走行道路(現在地)よりも緯度が高い位置にある道路については、例えば気象データなどを用いて自車両が滑ることなく走行可能な最大傾斜度を小さい値に補正する。
【0018】
さらに、冬季の積雪や凍結等を要因として滑る可能性があると判定する場合には、統計情報としての気象データを指標とした推定も可能である。したがって、制御部11は、過去の積雪や温度分布に基づいて、冬季のみ所要時間が長い走行経路については積雪や凍結等が発生していると考えられることから、自車両が滑る可能性が高い区間とし、傾斜度が小さい道路であっても滑る可能性があると判定する。すなわち、制御部11は、統計的に冬季に積雪や凍結等が発生していると考えられる地域にある道路については、自車両が滑ることなく走行可能な最大傾斜度を小さい値に補正する。なお、制御部11は、その期間のスリップ情報については記憶部14等に記憶させておき、後日反映可能とするのが望ましい。
【0019】
さらにまた、冬季の積雪や凍結、さらには大雨等を要因として滑る可能性があると判定する場合には、外部情報としての天候を指標とした推定が可能である。したがって、制御部11は、自車両の走行予定時間帯に応じた気温や積雪量等の天気予報情報を取得することにより、自車両が滑る可能性が高い道路の判定に反映させることができる。すなわち、制御部11は、例えば気温が氷点下又は積雪があるとの予報であれば自車両が滑る可能性があると判定し、自車両が滑ることなく走行可能な最大傾斜度を小さい値に補正する。なお、夏季であっても大雨情報を取得した場合には、付近一帯にぬかるみが発生していると予測されるので、制御部11は、このような情報を取得した場合にも、自車両が滑ることなく走行可能な最大傾斜度を小さい値に補正する。また、制御部11は、冬季であっても気温が十分に上昇することが予想される道路については、滑りにくいと判定し、自車両が滑ることなく走行可能な最大傾斜度を大きい値に補正するようにしてもよい。
【0020】
制御部11は、以上のようにして地図基本情報や外部情報に基づいて、他の場所における各道路の走行可能な最大傾斜度を補正したら、次に、ステップS6において、表示部12に表示されている地図内の各道路について、地図基本情報に基づいてそれぞれの道路の傾斜度を算出し、自車両が滑ることなく走行可能な最大傾斜度よりも大きい傾斜度を有する道路を走行回避区間として認識する。そして、制御部11は、認識した走行回避区間を地図上で識別可能な状態として表示部12に表示させる。例えば、制御部11は、表示部12に表示されている走行回避区間とした道路については別色表示する等、その道路が走行回避区間である旨を明示する。
【0021】
また、認識した走行回避区間がルート探索処理により設定した走行ルート上に存在する場合には、制御部11は、ステップS7において、走行回避区間を迂回する代替ルートを探索して、この代替ルートの案内を開始する。なお、制御部11は、代替走行経路の案内を開始した後に、なお走行不可能区間を走行している場合には、所定の警告メッセージや警告音を提示するようにしてもよい。また、新たにルート探索を行う場合には、制御部11は、認識した走行回避区間を回避する走行ルートを探索して、当該走行ルートの案内を開始するようにしてもよい。
【0022】
このように、本実施形態の車載ナビゲーション装置は、制御部11の制御のもとで、車両制御信号や地図基本情報、外部情報などの各種情報に基づいて自車両が滑る可能性がある道路を検出してこれを走行回避区間として認識し、この走行回避区間を地図上で識別可能に表示部12に表示させるとともに、ルート探索時にはこの走行回避区間を回避するルートを探索して案内を行い、ルート案内時に走行回避区間を検出した場合には迂回ルートをリルートして案内を行う。したがって、本実施形態の車載ナビゲーション装置においては、季節的要因による滑りの例として、夏季には適当である山間部の経路を冬季に選択した場合には、山間部に入る前に麓で早期に滑る可能性を判定し、代替走行経路を選択することができる。また、本実施形態の車載ナビゲーション装置においては、天候要因による滑りの例として、現在は自車両が滑ることなく走行が可能な区間であっても、走行予定時刻が早朝になり、気温が氷点下になるとの天気予報があった地域については、高低差が少ない平坦な経路を選択することにより、凍結時の滑り事故を防止することができる。さらに、本実施形態の車載ナビゲーション装置においては、自車両の状況による滑りの例として、交通情報では通行止めとなっていないが、自車両のタイヤが磨り減っており、積雪路や凍結路の走行が困難であると予想される場合には、自車両の走破性を反映させることにより、滑り始めた時点で代替経路案内を開始することができ、無理な走行計画を防止することができる。さらにまた、冬季の積雪路ではチェーンを使用するケースが想定されるが、乾燥路ではチェーンを使用することができないため、チェーンの脱着のタイミングを把握することが困難である。このような場合、本実施形態の車載ナビゲーション装置においては、滑りが予想される区間を表示部12に表示することにより、その区間に到達する前にチェーンの脱着タイミングを判断することができ、脱着に安全な場所の確保に寄与することができる。
【0023】
以上詳細に説明したように、本実施形態の車載ナビゲーション装置においては、制御部11の制御のもとで、走行中の自車両を制御するための車両制御信号に基づいて自車両が走行している道路の路面状況を検出し、検出した路面状況と地図データに含まれる地図基本情報、自車両外部の情報サーバ装置から配信される外部情報に基づいて、自車両が滑る可能性がある道路を検出して走行回避区間として認識して、この走行回避区間を地図上で識別可能に表示部12に表示させたり、この走行回避区間を回避するルートを探索してルート案内を行うようにしているので、自車両の走行性能にあわせた最適な案内を行うことができる。
【0024】
また、この車載ナビゲーション装置においては、走行路面の路面摩擦係数μを算出することにより、道路の傾斜に応じて実際に自車両の滑りが生じる可能性の高い道路を走行回避区間として求めることができる。具体的には、この車載ナビゲーション装置においては、制御部11の制御のもとで、検出した路面状況に基づいて自車両が滑ることなく走行可能な最大傾斜度を算出し、算出した走行可能最大傾斜度よりも大きい傾斜度を有する道路を走行回避区間として求めることにより、実際に自車両の滑りが生じる可能性の高い道路を走行回避区間として認識することができる。
【0025】
なお、以上説明した車載ナビゲーション装置は本発明の一適用例であり、本発明が以上の例に限定されるものではなく、本発明に係る技術的思想を逸脱しない範囲であれば具体的なハードウェア構成などにおいて種々の変更が可能であることは勿論である。
【図面の簡単な説明】
【0026】
【図1】本発明を適用した車載ナビゲーション装置の概略構成を示すブロック図である。
【図2】本発明を適用した車載ナビゲーション装置において走行経路の案内を行う際の一連の手順を示すフローチャートである。
【符号の説明】
【0027】
11 制御部
12 表示部
13 操作部
14 記憶部
15 通信機器
SABS ABS作動信号
SVDC VDC作動信号
SOTH 車両制御信号
SSPD 車速パルス信号
SVCS VICS情報
【技術分野】
【0001】
本発明は、車両内部の表示手段に地図を表示させながら車両の走行経路を案内する車載ナビゲーション装置、当該車載ナビゲーション装置を用いたナビゲーションシステム及びナビゲーション方法に関する。
【背景技術】
【0002】
従来から、地図の表示や音声によるガイダンスなどによって車両の走行経路を案内する車載ナビゲーション装置が普及している。また、近年では、単に所要時間の長短に基づいて設定された走行経路を案内するのではなく、自車両が安全に走行できる経路を設定して案内する技術も提案されている(例えば、特許文献1参照。)。
【0003】
具体的には、この特許文献1には、道路網のリンク及び車両が走行する道路の道路状況を予め設定された危険度に応じてリンク毎にランク付けした道路状況ランクを含む地図データを用いて、比較的安全な経路を自車両の走行経路として設定して案内を行う技術が開示されている。
【特許文献1】特開2004−205348号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した特許文献1をはじめとする従来の車載ナビゲーション装置においては、あくまで統計処理された情報に基づいて、安全な走行が可能と判断される走行経路を設定して案内を行うようにしており、各車両毎に固有の特性が反映されたものではなかった。そのため、従来の車載ナビゲーション装置においては、各車両毎の走行性能にあわせた走行経路の案内を行うことができず、必ずしも最適な走行経路の案内を行うことができないという問題があった。
【0005】
本発明は、以上のような従来の実情に鑑みて創案されたものであって、各車両毎に固有の特性を反映した最適な走行経路の案内を行うことができる車載ナビゲーション装置、ナビゲーションシステム及びナビゲーション方法を提供することを目的としている。
【課題を解決するための手段】
【0006】
本発明では、前記目的を達成するために、走行中の自車両を制御するための車両制御信号に基づいて、自車両が走行している道路の路面状況を検出している。そして、検出した自車両の走行道路の路面状況と、地図を表示するための地図データに含まれる地図基本情報とに基づいて、自車両が滑る可能性がある他の道路を検出して、当該道路を走行回避区間として認識するようにしている。このようにして認識された走行回避区間は、例えば、地図上で識別可能に表示手段に表示させることでドライバに認識させることができる。また、この走行回避区間を回避する経路を自車両の走行経路として設定することで、自車両の走行性能にあわせた最適な走行経路の案内を行うことができる。
【発明の効果】
【0007】
本発明によれば、実際に走行している車両の車両制御信号から路面状況が検出され、検出された路面状況と地図基本情報とに基づいて当該車両が滑る可能性がある他の道路が当該車両の走行回避区間として認識されるので、各車両毎に固有の特性を反映した最適な走行経路の案内を行うことができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の具体的な実施形態について、図面を参照しながら詳細に説明する。
【0009】
図1は、本実施形態の車載ナビゲーション装置の概略構成を示すブロック図である。この車載ナビゲーション装置は、車両に搭載されて車両の走行経路を案内するものであり、図1に示すように、各部を統括的に制御する制御部11と、液晶ディスプレイ等を用いた表示部12と、各種操作スイッチを有する操作部13と、表示部12に地図を表示させるための地図データを記憶する記憶部14とを備える。この車載ナビゲーション装置は、制御部11の制御のもとで、操作部13を介したユーザの操作に基づいて、記憶部14に記憶されている地図データを用いて地図を描画して表示部12に表示させながら、当該車載ナビゲーション装置が搭載された車両(自車両)の走行経路の案内を行う。ここで、記憶部14に記憶されている地図データには、走行経路の傾斜度を示す傾斜度情報や経緯度及び標高を示す経緯度・標高情報等も地図基本情報として含まれており、制御部11は、この地図データから、自車両の走行経路の傾斜度、経緯度及び標高等を把握することが可能となっている。
【0010】
また、特に本実施形態の車載ナビゲーション装置では、制御部11が、走行中の自車両を制御するための車両制御信号に基づいて、自車両が走行している道路の路面状況を検出する機能を有している。具体的には、制御部11には、自車両に搭載されるABS(Anti-Lock Brake System)システムからのABS作動信号SABSや、VDC(Vehicle Dynamics Control)システムからのVDC作動信号SVDC、さらには、自車両が横滑りしている旨を示す信号等のその他の車両制御信号SOTHが供給される。そして、制御部11は、これらの各種車両制御信号に基づいて、当該自車両に滑りが発生した旨を検出する。また、制御部11は、車速に応じて発生される車速パルス信号SSPDを読み込んで、この車速パルス信号SSPDに基づいて、自車両の加減速度を検出する。また、制御部11は、この検出した自車両の加減速度に基づいて、自車両が走行している道路の路面の滑りやすさを示す路面摩擦係数μを算出する。そして、制御部11は、算出した路面摩擦係数μに基づいて、自車両が滑ることなく走行可能な最大傾斜度を算出する。
【0011】
さらに、制御部11は、自車両外部からの外部情報を収集することも可能となっている。すなわち、本実施形態の車載ナビゲーション装置は、図示しないVICS(Vehicle Information and Communication System)センタに設置された情報サーバ装置から配信された電波ビーコン信号及び光ビーコン信号並びにFM(Frequency Modulation)多重放送からなるVICS情報SVCSを取得する機能を有しており、制御部11は、取得されたVICS情報SVCSに基づいて、走行予定経路の季節情報や天気予報情報等を収集する。さらにまた、制御部11は、いわゆるプローブカーによって収集されて所定の情報サーバ装置から配信された走行予定の地域情報等を、携帯電話機等の通信機器15を介して受信することによって収集することもできる。
【0012】
このような本実施形態の車載ナビゲーション装置は、制御部11の制御のもとで、図2に示すような一連の手順にしたがって、自車両の走行経路の案内を行う。
【0013】
まず、制御部11は、ステップS1において、車両制御信号に基づいて自車両に滑りが発生したことを検出すると、ステップS2において、自車両の加減速度を算出し、ステップS3において、算出した加減速度に基づいて、自車両が走行している道路の路面摩擦係数μを算出する。
【0014】
具体的には、制御部11は、例えばABS作動信号SABSが供給されることによって自車両に滑りが発生した旨を検出すると、そのときに得られた車速パルス信号SSPDにおけるパルス数の増減に基づいて加減速度を算出する。そして、制御部11は、算出した加減速度と重力加速度を用いて、路面摩擦係数μ=(加減速度)/(重力加速度)を算出する。また、制御部11は、VDC作動信号SVDCが供給されることによって自車両に滑りが発生した旨を検出した場合には、その車速パルス加減速度を活用することにより、路面摩擦係数μを算出する。なお、制御部11は、その他の各種車両制御信号SOTHに基づいて、路面摩擦係数μを推定するようにしてもよい。
【0015】
続いて、制御部11は、ステップS4において、算出した自車両の走行道路の路面摩擦係数μを内部メモリ等の記憶手段に記憶するとともに、この路面摩擦係数μに基づいて、自車両が滑ることなく走行可能な最大傾斜度を算出する。さらに、制御部11は、ステップS5において、例えば、自車両の走行道路の路面形状、地域情報、統計情報、季節情報、天気予報情報といった、記憶部14に記憶されている地図基本情報や外部の情報サーバ装置から取得した外部情報に基づいて、他の場所における各道路毎に、自車両が滑ることなく走行可能な最大傾斜度を補正する。すなわち、制御部11は、他の場所における各道路の滑りやすさをその路面の傾斜度を基本とするが、その場所の環境条件に応じて同じ傾斜度でも自車両の滑りやすさに差が生じるので、環境条件を特定可能な各種情報に基づいて、各道路毎に自車両が走行可能な最大傾斜度を補正する。
【0016】
具体的には、冬季の積雪や凍結等を要因として滑る可能性があると判定する場合には、路面形状としての標高を指標とした推定が可能である。したがって、制御部11は、自車両の現在地の標高よりも高い位置にある地域は滑る可能性が高い区間とし、傾斜度が小さい道路であっても滑る可能性があると判定する。すなわち、制御部11は、例えば100mあたりの温度降下を0.6℃として考え、自車両の走行道路(現在地)よりも標高が高い位置にある道路については、自車両が滑ることなく走行可能な最大傾斜度を温度降下に応じて小さい値に補正する。
【0017】
また、冬季の積雪や凍結等を要因として滑る可能性があると判定する場合には、地域情報としての緯度を指標とした推定も可能である。したがって、制御部11は、自車両の現在地よりも緯度が高い地域は滑る可能性が高い区間とし、傾斜度が小さい道路であっても滑る可能性があると判定する。すなわち、制御部11は、自車両の走行道路(現在地)よりも緯度が高い位置にある道路については、例えば気象データなどを用いて自車両が滑ることなく走行可能な最大傾斜度を小さい値に補正する。
【0018】
さらに、冬季の積雪や凍結等を要因として滑る可能性があると判定する場合には、統計情報としての気象データを指標とした推定も可能である。したがって、制御部11は、過去の積雪や温度分布に基づいて、冬季のみ所要時間が長い走行経路については積雪や凍結等が発生していると考えられることから、自車両が滑る可能性が高い区間とし、傾斜度が小さい道路であっても滑る可能性があると判定する。すなわち、制御部11は、統計的に冬季に積雪や凍結等が発生していると考えられる地域にある道路については、自車両が滑ることなく走行可能な最大傾斜度を小さい値に補正する。なお、制御部11は、その期間のスリップ情報については記憶部14等に記憶させておき、後日反映可能とするのが望ましい。
【0019】
さらにまた、冬季の積雪や凍結、さらには大雨等を要因として滑る可能性があると判定する場合には、外部情報としての天候を指標とした推定が可能である。したがって、制御部11は、自車両の走行予定時間帯に応じた気温や積雪量等の天気予報情報を取得することにより、自車両が滑る可能性が高い道路の判定に反映させることができる。すなわち、制御部11は、例えば気温が氷点下又は積雪があるとの予報であれば自車両が滑る可能性があると判定し、自車両が滑ることなく走行可能な最大傾斜度を小さい値に補正する。なお、夏季であっても大雨情報を取得した場合には、付近一帯にぬかるみが発生していると予測されるので、制御部11は、このような情報を取得した場合にも、自車両が滑ることなく走行可能な最大傾斜度を小さい値に補正する。また、制御部11は、冬季であっても気温が十分に上昇することが予想される道路については、滑りにくいと判定し、自車両が滑ることなく走行可能な最大傾斜度を大きい値に補正するようにしてもよい。
【0020】
制御部11は、以上のようにして地図基本情報や外部情報に基づいて、他の場所における各道路の走行可能な最大傾斜度を補正したら、次に、ステップS6において、表示部12に表示されている地図内の各道路について、地図基本情報に基づいてそれぞれの道路の傾斜度を算出し、自車両が滑ることなく走行可能な最大傾斜度よりも大きい傾斜度を有する道路を走行回避区間として認識する。そして、制御部11は、認識した走行回避区間を地図上で識別可能な状態として表示部12に表示させる。例えば、制御部11は、表示部12に表示されている走行回避区間とした道路については別色表示する等、その道路が走行回避区間である旨を明示する。
【0021】
また、認識した走行回避区間がルート探索処理により設定した走行ルート上に存在する場合には、制御部11は、ステップS7において、走行回避区間を迂回する代替ルートを探索して、この代替ルートの案内を開始する。なお、制御部11は、代替走行経路の案内を開始した後に、なお走行不可能区間を走行している場合には、所定の警告メッセージや警告音を提示するようにしてもよい。また、新たにルート探索を行う場合には、制御部11は、認識した走行回避区間を回避する走行ルートを探索して、当該走行ルートの案内を開始するようにしてもよい。
【0022】
このように、本実施形態の車載ナビゲーション装置は、制御部11の制御のもとで、車両制御信号や地図基本情報、外部情報などの各種情報に基づいて自車両が滑る可能性がある道路を検出してこれを走行回避区間として認識し、この走行回避区間を地図上で識別可能に表示部12に表示させるとともに、ルート探索時にはこの走行回避区間を回避するルートを探索して案内を行い、ルート案内時に走行回避区間を検出した場合には迂回ルートをリルートして案内を行う。したがって、本実施形態の車載ナビゲーション装置においては、季節的要因による滑りの例として、夏季には適当である山間部の経路を冬季に選択した場合には、山間部に入る前に麓で早期に滑る可能性を判定し、代替走行経路を選択することができる。また、本実施形態の車載ナビゲーション装置においては、天候要因による滑りの例として、現在は自車両が滑ることなく走行が可能な区間であっても、走行予定時刻が早朝になり、気温が氷点下になるとの天気予報があった地域については、高低差が少ない平坦な経路を選択することにより、凍結時の滑り事故を防止することができる。さらに、本実施形態の車載ナビゲーション装置においては、自車両の状況による滑りの例として、交通情報では通行止めとなっていないが、自車両のタイヤが磨り減っており、積雪路や凍結路の走行が困難であると予想される場合には、自車両の走破性を反映させることにより、滑り始めた時点で代替経路案内を開始することができ、無理な走行計画を防止することができる。さらにまた、冬季の積雪路ではチェーンを使用するケースが想定されるが、乾燥路ではチェーンを使用することができないため、チェーンの脱着のタイミングを把握することが困難である。このような場合、本実施形態の車載ナビゲーション装置においては、滑りが予想される区間を表示部12に表示することにより、その区間に到達する前にチェーンの脱着タイミングを判断することができ、脱着に安全な場所の確保に寄与することができる。
【0023】
以上詳細に説明したように、本実施形態の車載ナビゲーション装置においては、制御部11の制御のもとで、走行中の自車両を制御するための車両制御信号に基づいて自車両が走行している道路の路面状況を検出し、検出した路面状況と地図データに含まれる地図基本情報、自車両外部の情報サーバ装置から配信される外部情報に基づいて、自車両が滑る可能性がある道路を検出して走行回避区間として認識して、この走行回避区間を地図上で識別可能に表示部12に表示させたり、この走行回避区間を回避するルートを探索してルート案内を行うようにしているので、自車両の走行性能にあわせた最適な案内を行うことができる。
【0024】
また、この車載ナビゲーション装置においては、走行路面の路面摩擦係数μを算出することにより、道路の傾斜に応じて実際に自車両の滑りが生じる可能性の高い道路を走行回避区間として求めることができる。具体的には、この車載ナビゲーション装置においては、制御部11の制御のもとで、検出した路面状況に基づいて自車両が滑ることなく走行可能な最大傾斜度を算出し、算出した走行可能最大傾斜度よりも大きい傾斜度を有する道路を走行回避区間として求めることにより、実際に自車両の滑りが生じる可能性の高い道路を走行回避区間として認識することができる。
【0025】
なお、以上説明した車載ナビゲーション装置は本発明の一適用例であり、本発明が以上の例に限定されるものではなく、本発明に係る技術的思想を逸脱しない範囲であれば具体的なハードウェア構成などにおいて種々の変更が可能であることは勿論である。
【図面の簡単な説明】
【0026】
【図1】本発明を適用した車載ナビゲーション装置の概略構成を示すブロック図である。
【図2】本発明を適用した車載ナビゲーション装置において走行経路の案内を行う際の一連の手順を示すフローチャートである。
【符号の説明】
【0027】
11 制御部
12 表示部
13 操作部
14 記憶部
15 通信機器
SABS ABS作動信号
SVDC VDC作動信号
SOTH 車両制御信号
SSPD 車速パルス信号
SVCS VICS情報
【特許請求の範囲】
【請求項1】
車両内部の表示手段に地図を表示させながら車両の走行経路を案内する車載ナビゲーション装置において、
走行中の自車両を制御するための車両制御信号に基づいて、自車両が走行している道路の路面状況を検出する路面状況検出手段と、
前記路面状況検出手段によって検出された自車両の走行道路の路面状況と、前記地図を表示するための地図データに含まれる地図基本情報とに基づいて、自車両が滑る可能性がある他の道路を検出して、当該道路を走行回避区間として認識する走行回避区間認識手段とを備えること
を特徴とする車載ナビゲーション装置。
【請求項2】
前記路面状況検出手段は、自車両の走行道路の路面摩擦係数を算出すること
を特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項3】
前記路面状況検出手段によって検出された自車両の走行道路の路面摩擦係数に基づいて、自車両が滑ることなく走行可能な最大傾斜度を算出する傾斜度算出手段を備え、
前記走行回避区間認識手段は、前記傾斜度算出手段によって算出された最大傾斜度よりも大きい傾斜度を有する道路を走行回避区間として認識すること
を特徴とする請求項2に記載の車載ナビゲーション装置。
【請求項4】
前記走行回避区間認識手段は、前記路面状況検出手段によって検出された自車両の走行道路の路面状況と、前記地図を表示するための地図データに含まれる地図基本情報と、自車両の外部から収集した外部情報とに基づいて、自車両が滑る可能性がある他の道路を検出すること
を特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項5】
前記走行回避区間認識手段によって認識された走行回避区間を、地図上で識別可能に前記表示手段に表示させる表示制御手段を備えること
を特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項6】
前記走行回避区間認識手段によって認識された走行回避区間を回避する経路を自車両の推奨走行経路として探索する経路探索手段を備えること
を特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項7】
前記経路探索手段は、自車両が前記推奨走行経路を走行しているときに、前記走行回避区間認識手段によって前記推奨走行経路上で新たな走行回避区間が認識された場合には、当該走行回避区間を迂回する新たな経路を再探索すること
を特徴とする請求項6に記載の車載ナビゲーション装置。
【請求項8】
車両に搭載される車載ナビゲーション装置と、当該車載ナビゲーション装置が搭載される車両に対して所定の情報を配信する情報サーバ装置とを備え、前記車載ナビゲーション装置が車両内部の表示手段に地図を表示させながら車両の走行経路を案内するナビゲーションシステムにおいて、
前記車載ナビゲーション装置が、走行中の自車両を制御するための車両制御信号に基づいて自車両が走行している道路の路面状況を検出し、検出した自車両の走行道路の路面状況と、前記地図を表示するための地図データに含まれる地図基本情報と、前記情報サーバ装置から配信された情報とに基づいて、自車両が滑る可能性がある他の道路を検出して、当該道路を走行回避区間として認識すること
を特徴とするナビゲーションシステム。
【請求項9】
車両内部の表示手段に地図を表示させながら車両の走行経路を案内するナビゲーション方法において、
走行中の自車両を制御するための車両制御信号に基づいて、自車両が走行している道路の路面状況を検出する工程と、
検出した路面状況と、前記地図を表示するための地図データに含まれる地図基本情報と、自車両の外部から収集した外部情報とに基づいて、自車両が滑る可能性がある他の道路を検出して、当該道路を走行回避区間として認識する工程とを有すること
を特徴とするナビゲーション方法。
【請求項1】
車両内部の表示手段に地図を表示させながら車両の走行経路を案内する車載ナビゲーション装置において、
走行中の自車両を制御するための車両制御信号に基づいて、自車両が走行している道路の路面状況を検出する路面状況検出手段と、
前記路面状況検出手段によって検出された自車両の走行道路の路面状況と、前記地図を表示するための地図データに含まれる地図基本情報とに基づいて、自車両が滑る可能性がある他の道路を検出して、当該道路を走行回避区間として認識する走行回避区間認識手段とを備えること
を特徴とする車載ナビゲーション装置。
【請求項2】
前記路面状況検出手段は、自車両の走行道路の路面摩擦係数を算出すること
を特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項3】
前記路面状況検出手段によって検出された自車両の走行道路の路面摩擦係数に基づいて、自車両が滑ることなく走行可能な最大傾斜度を算出する傾斜度算出手段を備え、
前記走行回避区間認識手段は、前記傾斜度算出手段によって算出された最大傾斜度よりも大きい傾斜度を有する道路を走行回避区間として認識すること
を特徴とする請求項2に記載の車載ナビゲーション装置。
【請求項4】
前記走行回避区間認識手段は、前記路面状況検出手段によって検出された自車両の走行道路の路面状況と、前記地図を表示するための地図データに含まれる地図基本情報と、自車両の外部から収集した外部情報とに基づいて、自車両が滑る可能性がある他の道路を検出すること
を特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項5】
前記走行回避区間認識手段によって認識された走行回避区間を、地図上で識別可能に前記表示手段に表示させる表示制御手段を備えること
を特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項6】
前記走行回避区間認識手段によって認識された走行回避区間を回避する経路を自車両の推奨走行経路として探索する経路探索手段を備えること
を特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項7】
前記経路探索手段は、自車両が前記推奨走行経路を走行しているときに、前記走行回避区間認識手段によって前記推奨走行経路上で新たな走行回避区間が認識された場合には、当該走行回避区間を迂回する新たな経路を再探索すること
を特徴とする請求項6に記載の車載ナビゲーション装置。
【請求項8】
車両に搭載される車載ナビゲーション装置と、当該車載ナビゲーション装置が搭載される車両に対して所定の情報を配信する情報サーバ装置とを備え、前記車載ナビゲーション装置が車両内部の表示手段に地図を表示させながら車両の走行経路を案内するナビゲーションシステムにおいて、
前記車載ナビゲーション装置が、走行中の自車両を制御するための車両制御信号に基づいて自車両が走行している道路の路面状況を検出し、検出した自車両の走行道路の路面状況と、前記地図を表示するための地図データに含まれる地図基本情報と、前記情報サーバ装置から配信された情報とに基づいて、自車両が滑る可能性がある他の道路を検出して、当該道路を走行回避区間として認識すること
を特徴とするナビゲーションシステム。
【請求項9】
車両内部の表示手段に地図を表示させながら車両の走行経路を案内するナビゲーション方法において、
走行中の自車両を制御するための車両制御信号に基づいて、自車両が走行している道路の路面状況を検出する工程と、
検出した路面状況と、前記地図を表示するための地図データに含まれる地図基本情報と、自車両の外部から収集した外部情報とに基づいて、自車両が滑る可能性がある他の道路を検出して、当該道路を走行回避区間として認識する工程とを有すること
を特徴とするナビゲーション方法。
【図1】


【図2】
【図2】
【公開番号】特開2006−242901(P2006−242901A)
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願番号】特願2005−62574(P2005−62574)
【出願日】平成17年3月7日(2005.3.7)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願日】平成17年3月7日(2005.3.7)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]