
車載ナビゲーション装置及び車両方位変更箇所判定プログラム
【課題】ターンテーブル設置箇所のような車両方位変更箇所の特定を演算処理負担の少ない簡単なアルゴリズムで実現する技術を提供する。
【解決手段】自車両の方位変化量と移動距離とに基づく推測位置とGPS測位に基づく自車両位置との間の所定値以上の位置ずれを検出する位置ずれ検出部18と、この位置ずれ検出部による位置ずれ検出時に自車両位置と推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する車両方位変更箇所判定部20とが備えられる。
【解決手段】自車両の方位変化量と移動距離とに基づく推測位置とGPS測位に基づく自車両位置との間の所定値以上の位置ずれを検出する位置ずれ検出部18と、この位置ずれ検出部による位置ずれ検出時に自車両位置と推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する車両方位変更箇所判定部20とが備えられる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車両に搭載され、自車両の進行方位を表す進行方位情報を取得することが可能な車載ナビゲーション装置、及びそれに用いることが可能な車両方位変更箇所判定プログラムに関する。
【背景技術】
【0002】
例えば、車載ナビゲーション装置等においては、ジャイロスコープ等の方位センサの出力や、GPS(Global Positioning System)受信機により取得した位置情報の変化等に基づいて自車両の進行方位を表す進行方位情報を取得する構成が既に知られている。このようなナビゲーション装置では、取得した進行方位情報を用いて、自車両の位置や進行方位を表す自車マークを地図とともに表示装置に表示する処理や目的地までの適切な経路を案内する処理などが行われる。
【0003】
ところで、一般的に、自車両のアクセサリ(ACC)電源がオフの状態では、それに連動してナビゲーション装置の電源もオフとなっており、自車両の進行方位を検出することができない。したがって、従来のナビゲーション装置では、電源がオフの間に、例えば、立体駐車場に設置されているターンテーブル等の方向転換装置によって自車両の方向転換が行われた場合に、当該方向転換による自車両の進行方位の変化を検出することができなかった。そのため、電源がオンされた後に、ナビゲーション装置が保持している進行方位と自車両の実際の進行方位とが異なることになり、自車両が走行を開始した後に正しい自車位置を認識できないという問題があった。
【0004】
このような問題を解消するため、ターンテーブルを備えた駐車場の位置や回転角度等の方位変更情報を格納したデータベースを備え、車両のイグニッションスイッチがオフしたときに、データベースに格納された方位情報を用いて自車方位を補正し、出庫する際の自車方位を正確に検出することが提案されている(例えば、特許文献1参照)。 しかしながら、特許文献1に記載の装置は、ターンテーブルを備えた駐車場を表す情報が予めデータベースに格納されている必要があり、ターンテーブル駐車場が新設された場合など、利用する駐車場を表す情報がデータベースに格納されていない場合、自車方位が補正できず、出庫して走行を開始した自車両の進行方位が間違ったままとなる問題が生じる。
【0005】
このため、データベースに予めターンテーブルを表す情報が格納されていなくても、自車位置を補正できるようにするナビゲーション装置も提案されている(例えば、特許文献2参照)。このナビゲーション装置は、自車の方位変化量および移動距離を検出する位置情報検出手段を備え、前記位置情報検出手段の検出結果に基づき推測航法を用いて自車位置を表す推測位置を特定し、自車の走行開始時に、ターンテーブルの位置および前記ターンテーブルの旋回による回転角を示すターンテーブル候補情報が記憶されたデータベースを参照して、自車位置に前記ターンテーブルが存在しないことを判定した場合には、前記推測位置を自車位置として特定し、自車位置に前記ターンテーブルが存在することを判定した場合には、前記ターンテーブル候補情報に含まれる前記回転角に応じて前記推測位置を補正して自車位置を特定し、前記特定した自車位置を記憶手段に記憶する。さらにこのナビゲーション装置は、GPS衛星からの電波を受信して測位データを出力するGPS受信装置と、自車の走行開始時に、GPS受信装置からの測位データに基づいて自車位置を表すGPS位置を測位したか否かを判定するGPS測位判定手段と、GPS測位判定手段によってGPS位置を測位したと判定された場合、GPS位置と推測位置に基づいて、ターンテーブルによる旋回が実施されたか否かを判定する旋回判定手段と、旋回判定手段によってターンテーブルによる旋回が実施されたと判定された場合、記憶手段に記憶された走行開始前の自車位置をターンテーブルの位置として、該ターンテーブルの位置およびターンテーブルの旋回による回転角を示すターンテーブル候補情報をデータベースに記憶する第1のデータベース記憶手段とを備えている(例えば、特許文献2参照)。特許文献2に記載のナビゲーション装置では、算出された推測軌跡から特定される自車の推測位置と、GPS受信装置から入力される測位データから特定したGPS位置を比較して、両者が一致しない場合にはターンテーブルによる旋回が実施されたと判定し、両者が一致する場合にはターンテーブルによる旋回が実施されないと判定するが、その際、自車の推測位置とGPS位置には測位誤差が含まれるため、両者が完全に一致していなくても、ある許容誤差内に両者が含まれていれば、一致すると判定している。しかしながら、このように推測位置とGPS位置という2つの点を用いてターンテーブルの存在を判定するアルゴリズムは開示されていない。このアルゴリズムが複雑になると演算処理の負担が大きくなり、必要な時間内に判定ができないという問題が生じる。
【0006】
【特許文献1】特開2002−267460号公報(段落番号0008−0012、図1)
【特許文献2】特開2008−215923号公報(段落番号0027−0088、図4)
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記実状に鑑み、本発明の目的は、ターンテーブル設置箇所のような車両方位変更箇所の特定を演算処理負担の少ない簡単なアルゴリズムで実現する技術を提供することである。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明に係る車載ナビゲーション装置の特徴構成は、GPS測位によって自車両の位置を表す自車両位置情報を取得するGPS位置情報取得部と、自車両の方位変化量と移動距離とによって自車両の進行方位を表す進行方位情報を取得する進行方位情報取得部と、前記進行方位情報に基づいて自車両の推測位置を決定する推測位置決定部と、前記推測位置と前記自車両位置情報に基づく自車両位置との間の所定値以上の位置ずれを検出する位置ずれ検出部と、前記位置ずれ検出部による位置ずれ検出時に前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する車両方位変更箇所判定部とを備えていることである。
【0009】
この特徴構成によれば、進行方位情報に基づく現在自車両位置である走行軌跡の先頭部の位置とGPS測位に基づく現在自車両位置とが所定値以上ずれた場合、前記自車両位置と前記推測位置とを結ぶ直線の中点またはその直線の垂直二等分線上に位置する点を算定し、この算定された点を車両方位変更箇所と判定する。これにより、車両方位変更箇所の特定を演算処理負担に少ない簡単なアルゴリズムで実現できる。なお、道路に面したところという条件があるとしても、多くの道路が密集している地域では、算定された垂直二等分線上に多くの道路が位置する可能性があり、車両方位変更箇所となる複数の候補箇所が生じる可能性があるが、そのような状況下では、走行距離という条件を考慮することで候補箇所を絞り込むという方策を講じることは好適である。
【0010】
進行方位情報が取得できない状態下で車両の方位が変更するというような現象の多くは、駐車設備の内部などに設置されている車両ターンテーブルによって引き起こされる。このことから、本発明の好適な実施形態の1つでは、車両方位変更箇所判定部で判定された車両方位変更箇所を車両ターンテーブル設置箇所とみなす。これにより、車両ターンテーブルの回転角度は実質的には限られているので車両方位変更箇所の位置を特定する際の有力な判定条件とすることができる。特に、設置されている車両ターンテーブルの多くが180°回転タイプであることを考慮するなら、車両を180°回転させる180°ターンテーブルに前記車両ターンテーブルを限定することも可能となる。これにより方位変更が180°回転に限定され、車両方位変更箇所を特定する判定処理が簡単化される。
【0011】
ところで、方位センサなどに基づく進行方位情報が取得できない状態で車両の方位が変更される場合、車両ターンテーブルなどでもそうであるが、進行方位情報取得部を動作させる電源がオフの状態での車両方位変更である可能性が高い。このことから、そのような電源のオン・オフ時点での車両位置の周辺領域に車両方位変更箇所が存在するとみなすことが合理的である。従って、本発明の好適な実施形態の1つでは、前記進行方位情報取得部を動作させる電源のオン・オフを検出する電源動作検出部が備えられ、前記車両方位変更箇所判定部において前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する際に、当該車両方位変更箇所が前記電源動作検出部による電源オン・オフ検出時の自車位置の周辺領域に含まれていることを必要条件とするように構成されている。これにより、車両方位変更箇所を特定する判定処理の信頼性が向上する。
【0012】
前記判定された車両方位変更箇所が車載ナビゲーション装置に備えられている地図データベースに記録されるような構成を採用すれば、以後は、特許文献1に開示されているような、車両のイグニッションスイッチがオフしたときに、データベースに格納された方位情報を用いて自車方位を補正する技術を、人為的な地図更新なしで利用することができる。これにより、推測位置決定部は、車両方位変更箇所からの走行開始時点から正確な自車両の推測位置を決定することができる。
【0013】
さらには、上述した本発明による車載用ナビゲーション装置の技術的特徴は車両方位変更箇所判定プログラムにも適用可能であり、それゆえ、本発明は、そのようなプログラムや方法も権利の対象とすることができる。例えば、GPS測位によって自車両の位置を表す自車両位置情報を取得するGPS位置情報取得部と、自車両の方位変化量と移動距離とによって自車両の進行方位を表す進行方位情報を取得する進行方位情報取得部と、前記進行方位情報に基づいて自車両の推測位置を決定する推測位置決定部とを備えた車載ナビゲーション装置を制御するコンピュータにより実行される車両方位変更箇所判定プログラムは、前記推測位置と前記自車両位置情報に基づく自車両位置との間の所定値以上の位置ずれを検出する位置ずれ検出ステップと、前記位置ずれ検出ステップによる位置ずれ検出時に前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する判定ステップとをコンピュータに実行させる。当然ながら、このような車両方位変更箇所判定プログラムも上述した車載ナビゲーション装置で述べた作用効果を得ることができ、さらにその好適な形態例として述べたいくつかの付加的技術を組み込むことも可能である。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施形態を図面に基づいて説明する。
図1は、本実施形態に係る車載ナビゲーション装置の概略構成を示すブロック図である。この車載ナビゲーション装置は、自車両の現在位置を表す自車位置情報、進行方位を表す進行方位情報、地図情報を取得し、それらの情報に基づいて、自車位置表示、出発地から目的地までの経路探索、目的地までの経路案内等の案内処理を行う。そして、この車載ナビゲーション装置は、進行方位情報に基づいて自車両の推測位置を決定する機能、電源オフ状態等に起因して進行方位情報を取得できない間にターンテーブル等の車両方位変更装置(以下単にターンテーブルと称する)によって自車両の進行方向が変更させられたことを認識してそのターンテーブルの位置(車両方位変更箇所)を判定する機能などを備えている。
【0015】
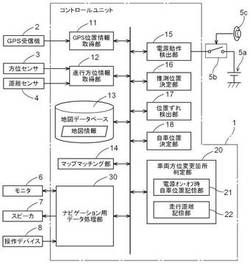
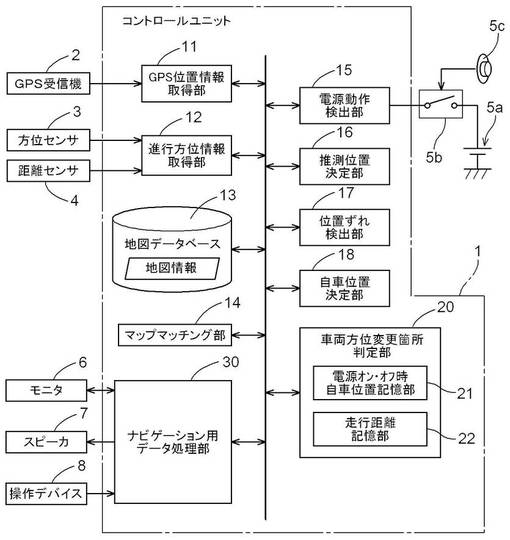
図1に示す車載ナビゲーション装置の各機能部は、車載ナビゲーション装置に含まれているコントロールユニット1によって構築されている。コントロールユニット1は、CPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部をハードウェア又はソフトウェア(プログラム)或いはその両方により構築している。本発明に特に関係する機能部は、GPS位置情報取得部11、進行方位情報取得部12、地図データベース13、マップマッチング部14、電源動作検出部15、推測位置決定部16、位置ずれ検出部17、自車位置決定部18、車両方位変更箇所判定部20、ナビゲーション用データ処理部30などである。
【0016】
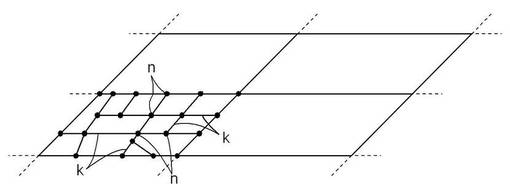
なお、地図データベース13は、例えば、ハードディスクドライブ、DVD−ROMを備えたDVDドライブ、CD−ROMを備えたCDドライブ等のように、情報を記憶可能な記録媒体やその駆動装置といったハードウェアが構成要素の中心となっているが、地図情報を構成する道路データなどの記録や抽出のプログラムも含んでいる。地図データベース13は、所定の区画毎に分けられた地図情報が格納されており、図2にそのデータ構造が模式的に示されている。図2に示すように、地図情報は、交差点に対応する多数のノードnと、各交差点間を結ぶ道路に対応するリンクkとの接続関係により道路ネットワークを表す道路データを有している。各ノードnは、緯度及び経度で表現された地図上の位置(座標)の情報を有している。各リンクkは、ノードnを介して接続されている。また、各リンクkは、その属性情報として、道路種別、リンク長、道路幅、リンク形状を表現するための形状補間点等の情報を有している。ここで、道路種別情報は、例えば、高速道路、国道、県道、一般道、細街路、導入路等のように、道路を複数の種別に区分した際の道路種別の情報である。なお、図2においては、一つの区画の道路データのみを図示し、他の区画の道路データは省略している。
【0017】
GPS位置情報取得部11は、GPS測位によって自車両の位置を表す自車両位置情報を取得する機能を有する。このためGPS位置情報取得部11は、GPS受信機2と接続されている。GPS受信機2は、GPS(Global Positioning System)衛星からのGPS信号を受信する装置である。このGPS信号は、通常1秒おきに受信され、GPS位置情報取得部11へ出力される。GPS位置情報取得部11では、GPS受信機2で受信されたGPS衛星からの信号を解析し、自車両の現在位置(座標位置:緯度及び経度)を取得することができる。
【0018】
進行方位情報取得部12は、自車両の方位変化量と移動距離とによって自車両の進行挙動を表す進行方位情報(例えば進行ベクトルを規定するデータ)を取得する機能を有する。方位変化量及び移動距離を所定のサンプリング間隔で得ることで、サンプリング毎に自車両の位置を基点とした自車両の進行方位と進行距離、つまりサンプリング時間を少なくとも最小単位とする車両の進行挙動を表す進行ベクトルとしての車両の進行方位情報を取得することができる。このため進行方位情報取得部12は、方位センサ3及び距離センサ4と接続されている。方位センサ3は自車両Cの進行方位又はその進行方位の変化を検出するセンサである。この方位センサ3は、例えば、ジャイロスコープや、地磁気センサ等により構成される。そして、方位センサ3は、その検出結果を進行方位情報取得部12へ出力する。距離センサ4は、自車両の車速や移動距離を検出するセンサである。この距離センサ4は、例えば、車両のドライブシャフトやホイール等が一定量回転する毎にパルス信号を出力する車速パルスセンサ、自車両の加速度を検知するヨー・Gセンサ及び検知された加速度を積分する回路等により構成される。そして、距離センサ4は、その検出結果としての車速及び移動距離の測定信号を進行方位情報取得部12へ出力する。
【0019】
マップマッチング部14は、地図データベース13から自車位置周辺の地図情報を取得し、それに基づいて公知のマップマッチングを行う機能を有する。このマップマッチングにより、GPS位置情報取得部11から出力される自車両位置情報や進行方位情報取得部12から出力される進行方位情報による自車両の現在位置から最短の、地図情報に示される道路上における位置を探索する。この探索された位置は自車両道路上位置であり、この自車両道路上位置を自車位置決定部18はモニタ6に道路地図に重ねて表示する最終的な自車位置として決定する。つまり、自車両位置情報又は進行方位情報あるいはその両方による自車両の現在位置は、必要に応じてマップマッチング部14によって修正され、新たな自車両の現在位置となる。本出願では、この修正された自車両の現在位置に関する情報も自車位置に含まれるものとしている。
【0020】
電源動作検出部15は、進行方位情報取得部12を動作させる電源5aのオン・オフ(オン又はオフあるいはその両方)を検出する機能を有する。本実施形態においては、電源5aは、進行方位情報取得部12に電力を供給するだけでなく、コントロールユニット1を含む車載ナビゲーション装置の全体に電力を供給して動作させる。この電源5aとしては、例えば、自車両が備えるバッテリ等の蓄電装置が用いられる。そして、この電源5aのオン・オフは、ナビゲーション装置の主電源スイッチ5bにより切り替えられる。本実施形態においては、この主電源スイッチ5bの動作は、自車両Cが備える各電気機器に対する電源5aからの電力供給のオン又はオフを切り替えるアクセサリスイッチ(ACC)等の車両電源スイッチ5cに連動している。そして、電源動作検出部15は、このような主電源スイッチ5bの状態が、ナビゲーション装置に電力供給を行うオン状態であるか、そのような電力供給を遮断するオフ状態であるかを検出することにより、電源5aのオン又はオフを検出する。
【0021】
推測位置決定部16は、進行方位情報取得部12から出力される進行方位情報に基づいて推測航法の原理で自車両の推測位置を決定するが、この実施形態での推測位置決定部16は、進行方位情報取得部12から出力される進行方位情報に基づいて自車両の走行軌跡を生成して一時的に記憶する機能も有し、この走行軌跡の先頭部の位置が自車両の推測位置となる。つまり、車両の進行方位情報として所定時間毎の車両の進行挙動を表す進行ベクトルが入力されるので、順次その進行ベクトルをつなぎ合わせていくことで自車両の走行軌跡を生成することができ、そのように生成されていく走行軌跡の先頭部が最新の自車両の推測位置となる。走行軌跡が一時的に記憶されることで、最新のGPS測位に基づく自車両位置情報を取得するまでの自車両の走行軌跡やこの走行軌跡から算定される走行距離などを推測位置決定部16を通じて利用することができる。位置ずれ検出部17は、走行軌跡生成部16によって決定された自車両の推測位置と自車両位置情報(マップマッチング部14によって修正された自車両位置情報も含む)に基づく自車両位置との間の所定値以上の位置ずれを検出する機能を有する。
【0022】
自車位置決定部18は、最新のGPS測位に基づく自車両位置情報から得られるとともに必要に応じてマップマッチング部14によって修正された自車位置を自車両の推測位置に優先して真の自車位置として決定する。
【0023】
車両方位変更箇所判定部20は、位置ずれ検出部17によって所定値以上の位置ずれが検出されたときに、自車位置決定部18によって決定された自車両位置と推測航法に基づいた算定されている推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する機能を有する。なお、車両方位変更箇所判定部20によって判定された車両方位変更箇所、つまりターンテーブル設置箇所の位置を地図データベース13に与え、その地図情報に新規に認識されたターンテーブルとして追記させる。また、この実施形態では、車両方位変更箇所判定部20は、電源オン・オフ時自車位置記憶部21と走行距離記憶部22とを備えている。電源オン・オフ時自車位置記憶部21は、電源動作検出部15による、進行方位情報取得部12を動作させる電源のオン・オフ検出時の自車位置を記憶する。走行距離記憶部22は、推測位置決定部16で生成され記憶されている走行軌跡に基づく走行距離を記憶する。
【0024】
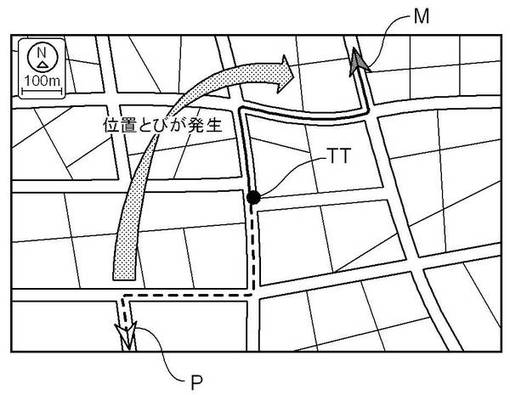
車両方位変更箇所判定部20の機能を図3及び図4を用いて説明する。図3は、位置ずれ検出部17によって位置ずれが検出され、モニタ6の画面において、自車位置マークが推測航法に基づいて算定されたいる推測位置から最新のGPS測位に基づく自車位置に位置飛びした状態を示している。図4は、位置飛び発生時の位置飛び元である推測位置と位置飛び先である自車両位置とから車両方位変更箇所としてのターンテーブル設置箇所を特定する判定処理を模式的に説明する説明図である。なお、図3及び図4において位置飛び元である推測位置は図番Pで、位置飛び先である自車両位置は図番Mで示され、図3においてターンテーブル設置箇所は図番TTで示されている。
【0025】
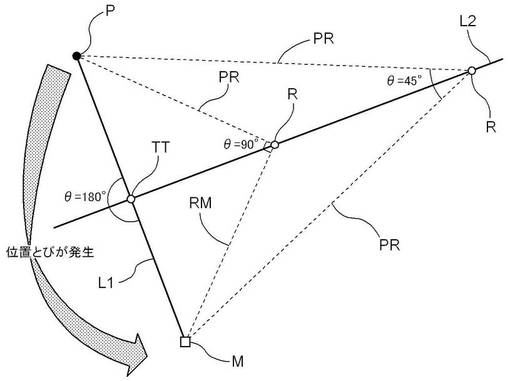
位置飛びが発生すると、車両方位変更箇所判定部20は、位置飛び元である推測位置:Pと位置飛び先である自車両位置:Mとを連結する連結線:L1に対する垂直二等分線:L2を生成する。推測航法を原理としている推測位置決定部16は、絶対的な方位を検出していないので、出発方位が誤っていると、真の自車位置とは全く異なる推測位置を決定することになるが、その推測位置が作り出していく走行軌跡の幾何学的な形状は真の走行軌跡と良好に類似している。例えば、出発方位の誤りが車両ターンテーブルに起因するとすれば、推測位置:Pを出発方位の誤り角度分だけ出発点回りで回転させた位置に自車両位置:Mがくることになる。言い換えると、上記垂直二等分線:L2の上、少なくともその近傍に車両方位変更箇所としての車両ターンテーブル設置場所が位置することになる。本発明を特徴付けている車両方位変更箇所判定部20の判定アルゴリズムはこのような本願発明者の知見に基づいている。
【0026】
図4から理解できるように、出発方位の誤り角度がθとすると、垂直二等分線:L2上の点:Rと推測位置:Pとを結ぶ直線:PRと、点:Rと自車両位置:Mとを結ぶ直線:RMとがなす角度がθとなる点:Rの位置に車両を角度θ(正負号は考慮される)だけ方位変更する車両ターンテーブルが設置されていることになる。例えば、出発方位の誤り角度が180°とすると、つまり車両ターンテーブルが180°車両ターンテーブルとすれば、推測位置:Pと自車両位置:Mとを連結する連結線:L1を2等分する中点(直線:PRと直線:RMとがなす角度が180°となる点:R)に180°車両ターンテーブルが設置されていると判定することができる。あるいは、車両ターンテーブルが90°車両ターンテーブルとすれば、垂直二等分線:L2の一方側に位置する、直線:PRと直線:RMとがなす角度が90°となる点:Rに90°車両ターンテーブルが設置されていると判定することができる。
【0027】
車両ターンテーブルの回転角度が特定できない場合、垂直二等分線:L2上の無数の点が車両ターンテーブル設置箇所の候補となるが、車両ターンテーブルが道路に面している場所にある(田畑の真ん中にはない)という条件を加味すると、候補が絞られ、たいていの場合、両ターンテーブル設置箇所を特定することができる。道路が密集しており、多くの車両ターンテーブル設置箇所の候補が存在することを想定する場合、以下のような追加の判定条件によって車両ターンテーブル設置箇所を特定することができる。
(1)走行距離記憶部22が備えられている実施形態では、推測位置決定部16によって生成された推測位置情報を走行距離記憶部22から読み出し算定された走行距離と直線:PR又は直線:RMの距離が類似する点でかつ道路に面した点を車両ターンテーブル設置箇所とみなす。推測位置情報から走行距離を算定する方法として代表的なものの1つは、走行開始時の推測位置と位置飛び時の推測位置とからその直線距離を演算して直線走行距離を求めることであり、他の一つは、走行開始時から位置飛び時までの間に決定された推測位置に基づいて生成される走行軌跡の積算値としての実走行距離から、例えば所定の係数をかけて直線走行距離を演算して求めることである。この走行距離条件により、車両ターンテーブル設置箇所としての垂直二等分線:L2上の1点を特定することができる。
(2)電源オン・オフ時自車位置記憶部21が備えられている実施形態では、電源オン・オフ検出時の自車位置をから読み出し、この自車位置の周辺領域に含まれておりかつ道路に面した点を車両ターンテーブル設置箇所とみなす。
(3)車両ターンテーブルの回転角度の多くが180°で、場合によっては90°であることを考慮して、車両ターンテーブルを180°または90°とみなし、直線:PRと直線:RMとがなす角度:θが180°または90°となる点でかつ道路に面した点を車両ターンテーブル設置箇所とみなす。さらに、車両ターンテーブルは180°車両ターンテーブルであると限定するなら、推測位置:Pと自車両位置:Mとを連結する連結線:L1の2等分点を車両ターンテーブル設置箇所とみなすことができ、一意的に車両ターンテーブル設置箇所を判定することができ、垂直二等分線:L2の作成が不要となる副次的な効果もある。
【0028】
ナビゲーション用データ処理部30は、自車位置表示、出発地から目的地までの経路探索、目的地までの経路案内、目的地検索等のナビゲーション機能を作り出す。例えば、ナビゲーション用データ処理部30は、マップマッチング部14で決定された自車位置としての自車両道路上位置に基づいて地図データベース13から自車両周辺の地図情報を取得してモニタ6の表示画面に地図の画像を表示するとともに、当該地図の画像上に、自車両の現在位置及び進行方位を表す自車位置マークを重ね合わせて表示する。また、ナビゲーション用データ処理部30は、地図データベース13に記憶された地図情報に基づいて、所定の出発地から目的地までの経路探索を行う。さらに、ナビゲーション用データ処理部30は、探索された出発地から目的地までの経路と自車位置とに基づいて、モニタ6及びスピーカ7の一方又は双方を用いて、運転者に対する経路案内を行う。モニタ6には操作デバイス8として機能するタッチパネルが装着されているが、これとは別な操作スイッチや操作ボタンを操作デバイス8として付加してもよい。
【0029】
次に、上述のように構成された車載ナビゲーション装置において、位置飛びが発生した際にこの位置飛び現象を利用して、車両方位変更箇所としてのターンテーブル設置箇所を判定して地図データベース13に登録する制御ルーチンを説明する。なお、この制御ルーチンでは、説明を簡単にするため、ターンテーブルとして180°ターンテーブルと90°ターンテーブルだけを取り扱うことにする。図5はその制御ルーチンを示すフローチャートである。
【0030】
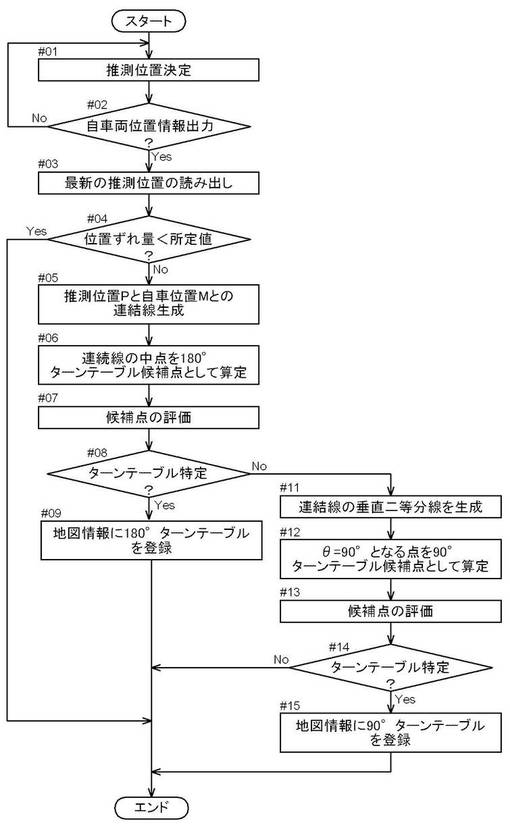
図5の制御ルーチンは、車両方位変更させたターンテーブルから車両が出たところでスタートしている。車両が始動してからしばらくの間は、GPS位置情報取得部11は新しい自車位置情報を出力できないので、進行方位情報による自車両の推測位置の決定とその一時記憶だけが推測位置決定部16によって行われる(#01)。この推測位置の生成と記憶はGPS位置情報取得部11が新しいGPS信号に基づいた自車両位置情報を取得して出力するまで続けられる(#02)。自車両位置情報が出力されると(#02Yes分岐)、最新の推測位置が読み出される(#03)。GPSに基づく自車両位置情報から読み出された自車両位置と最新の推測位置とを比較して位置ずれがチェックされる(#04)。位置ずれ量が判定閾値としての所定値未満であれば(#04Yes分岐)、ターンテーブルによる車両の方位変更がなかったとみなしてこのルーチンを終了する。位置ずれ量が所定値を越えていれば(#04No分岐)、ターンテーブルによる車両の方位変更が発生していたとして、上述したような位置飛び処理がナビゲーション用データ処理部30で行われるとともに、このルーチンでは以下のようなターンテーブル設置箇所判定処理を行う。
【0031】
まず、図4に示しているように、位置飛び元である推測位置:Pと位置飛び先である自車両位置:Mとを連結する連結線:L1を生成する(#05)。この連結線:L1の中点:R180が180°ターンテーブルの設置箇所と推測されるので、この中点:R180を算定し、180°ターンテーブル候補点とする(#06)。次にこの180°ターンテーブル候補点の信憑性を評価する(#07)。この信憑性評価、つまりターンテーブルの特定には種々の判定条件を用いることができる。ここでは次の条件が例示される。
(a)この候補点座標と道路データとを比較して、この候補点に車両がアクセスできるかどうか判定する。
(b)電源オン・オフ時自車位置記録部21から読み出された電源オン・オフ検出時の自車位置を中心とする所定範囲の周辺領域に候補点が含まれているかどうか判定する。
(c)走行距離記憶部22から読み出された走行距離と直線PR180又は直線MR180の長さが所定許容誤差内で一致するかどうか判定する。
(a)から(c)のなかで1つだけ採用すれば十分であるが、(a)を採用した場合、電源オン・オフ時自車位置記録部21や走行距離記憶部22が不要となるので構成が簡単となる。
【0032】
いずれにせよ、候補点の評価の結果、180°ターンテーブルが特定されたかどうかチェックされる(#08)。判定条件が満たされず180°ターンテーブルが特定されなかった場合(#08No分岐)、このルーチンを終了する。判定条件が満たされ180°ターンテーブルが特定された場合(#08Yes分岐)、地図データベース13にアクセスして地図情報にこの180°ターンテーブルに関する情報を登録する(#09)。
【0033】
判定条件が満たされずに特定されなかった場合(#08No分岐)、さらに90°ターンテーブルでの信憑性評価を以下のように行う。まず、連結線:L1に対する垂直二等分線:L2を生成する(#11)。次に、垂直二等分線:L2上で、推測位置:Pと自車両位置:Mとの間の角度θが90°となる点:Rを算定し、180°ターンテーブル候補点とする(#12)。さらに、この90°ターンテーブル候補点の信憑性を評価する(#13)。この信憑性評価の判定条件は上述した(a)(b)(c)などを用いることができる。ここでも、候補点の評価の結果、90°ターンテーブルが特定されたかどうかチェックされる(#14)。判定条件が満たされず180°ターンテーブルが特定されなかった場合(#14No分岐)、このルーチンを終了する。判定条件が満たされ90°ターンテーブルが特定された場合(#14Yes分岐)、地図データベース13にアクセスして地図情報にこの90°ターンテーブルに関する情報を登録する(#15)。
〔その他の実施形態〕
【0034】
(1) 上述した実施の形態の説明では、車両方位変更設備としてターンテーブル取り上げたが、トランバーサのような設備で車両の方位や位置を変更させる設備に対しても本発明による車両方位変更箇所の判定を適用することも可能である。さらには、方位センサ3や距離センサ4で正確にトレースできない切り返し操作が必要となる箇所の判定にも適用可能である。
(2) 上述した制御ルーチンでは、方向変更箇所として180度ターンテーブル設置箇所と90°ターンテーブル設置箇所に限定されていが、それ以外の方位変更回転角をもつ方向変更箇所ないしはターンテーブル設置箇所も同様な方法で特定することができる。つまり、図5におけるステップ#12からステップ#15の処理をθの値を順次変更しながら繰り返し処理することで、要求される方位変更回転角をもつ方向変更箇所(ターンテーブル設置箇所)をすべてチェックすることができる。
(3) 上述した制御ルーチンでは、特定されたターンテーブルの位置や方位変更角度などの情報は自己の地図データベース13に登録されていたが、通信回線やその他のデータ転送手法を用いて外部の地図データベースに登録するような構成も本発明に含まれる。
【図面の簡単な説明】
【0035】
【図1】本発明の1つの実施形態に係る車載ナビゲーション装置を示す機能ブロック図
【図2】地図データベースに格納されている道路データを模式的に示す模式図
【図3】、自車位置マークが推測航法に基づいて算定された推測位置から最新のGPS測位に基づく自車位置に位置飛びした状態を示すモニタ画面図
【図4】位置飛びが発生した時に車両方位変更箇所としてのターンテーブル設置箇所を判定するアルゴリズムを模式的に説明する説明図
【図5】ターンテーブル設置箇所を判定して地図データベースに登録する制御ルーチンを示すフローチャート
【符号の説明】
【0036】
11:GPS位置情報取得部
12:進行方位情報取得部
13:地図データベース
15:電源動作検出部
16:推測位置決定部
17:位置ずれ検出部
18:自車位置決定部
20:車両方位変更箇所判定部
21:電源オン・オフ時自車位置記憶部
22:走行距離記憶部
TT:ターンテーブル(車両方位変換設備)
【技術分野】
【0001】
本発明は、自車両に搭載され、自車両の進行方位を表す進行方位情報を取得することが可能な車載ナビゲーション装置、及びそれに用いることが可能な車両方位変更箇所判定プログラムに関する。
【背景技術】
【0002】
例えば、車載ナビゲーション装置等においては、ジャイロスコープ等の方位センサの出力や、GPS(Global Positioning System)受信機により取得した位置情報の変化等に基づいて自車両の進行方位を表す進行方位情報を取得する構成が既に知られている。このようなナビゲーション装置では、取得した進行方位情報を用いて、自車両の位置や進行方位を表す自車マークを地図とともに表示装置に表示する処理や目的地までの適切な経路を案内する処理などが行われる。
【0003】
ところで、一般的に、自車両のアクセサリ(ACC)電源がオフの状態では、それに連動してナビゲーション装置の電源もオフとなっており、自車両の進行方位を検出することができない。したがって、従来のナビゲーション装置では、電源がオフの間に、例えば、立体駐車場に設置されているターンテーブル等の方向転換装置によって自車両の方向転換が行われた場合に、当該方向転換による自車両の進行方位の変化を検出することができなかった。そのため、電源がオンされた後に、ナビゲーション装置が保持している進行方位と自車両の実際の進行方位とが異なることになり、自車両が走行を開始した後に正しい自車位置を認識できないという問題があった。
【0004】
このような問題を解消するため、ターンテーブルを備えた駐車場の位置や回転角度等の方位変更情報を格納したデータベースを備え、車両のイグニッションスイッチがオフしたときに、データベースに格納された方位情報を用いて自車方位を補正し、出庫する際の自車方位を正確に検出することが提案されている(例えば、特許文献1参照)。 しかしながら、特許文献1に記載の装置は、ターンテーブルを備えた駐車場を表す情報が予めデータベースに格納されている必要があり、ターンテーブル駐車場が新設された場合など、利用する駐車場を表す情報がデータベースに格納されていない場合、自車方位が補正できず、出庫して走行を開始した自車両の進行方位が間違ったままとなる問題が生じる。
【0005】
このため、データベースに予めターンテーブルを表す情報が格納されていなくても、自車位置を補正できるようにするナビゲーション装置も提案されている(例えば、特許文献2参照)。このナビゲーション装置は、自車の方位変化量および移動距離を検出する位置情報検出手段を備え、前記位置情報検出手段の検出結果に基づき推測航法を用いて自車位置を表す推測位置を特定し、自車の走行開始時に、ターンテーブルの位置および前記ターンテーブルの旋回による回転角を示すターンテーブル候補情報が記憶されたデータベースを参照して、自車位置に前記ターンテーブルが存在しないことを判定した場合には、前記推測位置を自車位置として特定し、自車位置に前記ターンテーブルが存在することを判定した場合には、前記ターンテーブル候補情報に含まれる前記回転角に応じて前記推測位置を補正して自車位置を特定し、前記特定した自車位置を記憶手段に記憶する。さらにこのナビゲーション装置は、GPS衛星からの電波を受信して測位データを出力するGPS受信装置と、自車の走行開始時に、GPS受信装置からの測位データに基づいて自車位置を表すGPS位置を測位したか否かを判定するGPS測位判定手段と、GPS測位判定手段によってGPS位置を測位したと判定された場合、GPS位置と推測位置に基づいて、ターンテーブルによる旋回が実施されたか否かを判定する旋回判定手段と、旋回判定手段によってターンテーブルによる旋回が実施されたと判定された場合、記憶手段に記憶された走行開始前の自車位置をターンテーブルの位置として、該ターンテーブルの位置およびターンテーブルの旋回による回転角を示すターンテーブル候補情報をデータベースに記憶する第1のデータベース記憶手段とを備えている(例えば、特許文献2参照)。特許文献2に記載のナビゲーション装置では、算出された推測軌跡から特定される自車の推測位置と、GPS受信装置から入力される測位データから特定したGPS位置を比較して、両者が一致しない場合にはターンテーブルによる旋回が実施されたと判定し、両者が一致する場合にはターンテーブルによる旋回が実施されないと判定するが、その際、自車の推測位置とGPS位置には測位誤差が含まれるため、両者が完全に一致していなくても、ある許容誤差内に両者が含まれていれば、一致すると判定している。しかしながら、このように推測位置とGPS位置という2つの点を用いてターンテーブルの存在を判定するアルゴリズムは開示されていない。このアルゴリズムが複雑になると演算処理の負担が大きくなり、必要な時間内に判定ができないという問題が生じる。
【0006】
【特許文献1】特開2002−267460号公報(段落番号0008−0012、図1)
【特許文献2】特開2008−215923号公報(段落番号0027−0088、図4)
【発明の開示】
【発明が解決しようとする課題】
【0007】
上記実状に鑑み、本発明の目的は、ターンテーブル設置箇所のような車両方位変更箇所の特定を演算処理負担の少ない簡単なアルゴリズムで実現する技術を提供することである。
【課題を解決するための手段】
【0008】
上記目的を達成するため、本発明に係る車載ナビゲーション装置の特徴構成は、GPS測位によって自車両の位置を表す自車両位置情報を取得するGPS位置情報取得部と、自車両の方位変化量と移動距離とによって自車両の進行方位を表す進行方位情報を取得する進行方位情報取得部と、前記進行方位情報に基づいて自車両の推測位置を決定する推測位置決定部と、前記推測位置と前記自車両位置情報に基づく自車両位置との間の所定値以上の位置ずれを検出する位置ずれ検出部と、前記位置ずれ検出部による位置ずれ検出時に前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する車両方位変更箇所判定部とを備えていることである。
【0009】
この特徴構成によれば、進行方位情報に基づく現在自車両位置である走行軌跡の先頭部の位置とGPS測位に基づく現在自車両位置とが所定値以上ずれた場合、前記自車両位置と前記推測位置とを結ぶ直線の中点またはその直線の垂直二等分線上に位置する点を算定し、この算定された点を車両方位変更箇所と判定する。これにより、車両方位変更箇所の特定を演算処理負担に少ない簡単なアルゴリズムで実現できる。なお、道路に面したところという条件があるとしても、多くの道路が密集している地域では、算定された垂直二等分線上に多くの道路が位置する可能性があり、車両方位変更箇所となる複数の候補箇所が生じる可能性があるが、そのような状況下では、走行距離という条件を考慮することで候補箇所を絞り込むという方策を講じることは好適である。
【0010】
進行方位情報が取得できない状態下で車両の方位が変更するというような現象の多くは、駐車設備の内部などに設置されている車両ターンテーブルによって引き起こされる。このことから、本発明の好適な実施形態の1つでは、車両方位変更箇所判定部で判定された車両方位変更箇所を車両ターンテーブル設置箇所とみなす。これにより、車両ターンテーブルの回転角度は実質的には限られているので車両方位変更箇所の位置を特定する際の有力な判定条件とすることができる。特に、設置されている車両ターンテーブルの多くが180°回転タイプであることを考慮するなら、車両を180°回転させる180°ターンテーブルに前記車両ターンテーブルを限定することも可能となる。これにより方位変更が180°回転に限定され、車両方位変更箇所を特定する判定処理が簡単化される。
【0011】
ところで、方位センサなどに基づく進行方位情報が取得できない状態で車両の方位が変更される場合、車両ターンテーブルなどでもそうであるが、進行方位情報取得部を動作させる電源がオフの状態での車両方位変更である可能性が高い。このことから、そのような電源のオン・オフ時点での車両位置の周辺領域に車両方位変更箇所が存在するとみなすことが合理的である。従って、本発明の好適な実施形態の1つでは、前記進行方位情報取得部を動作させる電源のオン・オフを検出する電源動作検出部が備えられ、前記車両方位変更箇所判定部において前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する際に、当該車両方位変更箇所が前記電源動作検出部による電源オン・オフ検出時の自車位置の周辺領域に含まれていることを必要条件とするように構成されている。これにより、車両方位変更箇所を特定する判定処理の信頼性が向上する。
【0012】
前記判定された車両方位変更箇所が車載ナビゲーション装置に備えられている地図データベースに記録されるような構成を採用すれば、以後は、特許文献1に開示されているような、車両のイグニッションスイッチがオフしたときに、データベースに格納された方位情報を用いて自車方位を補正する技術を、人為的な地図更新なしで利用することができる。これにより、推測位置決定部は、車両方位変更箇所からの走行開始時点から正確な自車両の推測位置を決定することができる。
【0013】
さらには、上述した本発明による車載用ナビゲーション装置の技術的特徴は車両方位変更箇所判定プログラムにも適用可能であり、それゆえ、本発明は、そのようなプログラムや方法も権利の対象とすることができる。例えば、GPS測位によって自車両の位置を表す自車両位置情報を取得するGPS位置情報取得部と、自車両の方位変化量と移動距離とによって自車両の進行方位を表す進行方位情報を取得する進行方位情報取得部と、前記進行方位情報に基づいて自車両の推測位置を決定する推測位置決定部とを備えた車載ナビゲーション装置を制御するコンピュータにより実行される車両方位変更箇所判定プログラムは、前記推測位置と前記自車両位置情報に基づく自車両位置との間の所定値以上の位置ずれを検出する位置ずれ検出ステップと、前記位置ずれ検出ステップによる位置ずれ検出時に前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する判定ステップとをコンピュータに実行させる。当然ながら、このような車両方位変更箇所判定プログラムも上述した車載ナビゲーション装置で述べた作用効果を得ることができ、さらにその好適な形態例として述べたいくつかの付加的技術を組み込むことも可能である。
【発明を実施するための最良の形態】
【0014】
以下、本発明の実施形態を図面に基づいて説明する。
図1は、本実施形態に係る車載ナビゲーション装置の概略構成を示すブロック図である。この車載ナビゲーション装置は、自車両の現在位置を表す自車位置情報、進行方位を表す進行方位情報、地図情報を取得し、それらの情報に基づいて、自車位置表示、出発地から目的地までの経路探索、目的地までの経路案内等の案内処理を行う。そして、この車載ナビゲーション装置は、進行方位情報に基づいて自車両の推測位置を決定する機能、電源オフ状態等に起因して進行方位情報を取得できない間にターンテーブル等の車両方位変更装置(以下単にターンテーブルと称する)によって自車両の進行方向が変更させられたことを認識してそのターンテーブルの位置(車両方位変更箇所)を判定する機能などを備えている。
【0015】
図1に示す車載ナビゲーション装置の各機能部は、車載ナビゲーション装置に含まれているコントロールユニット1によって構築されている。コントロールユニット1は、CPU等の演算処理装置を中核部材として、入力されたデータに対して種々の処理を行うための機能部をハードウェア又はソフトウェア(プログラム)或いはその両方により構築している。本発明に特に関係する機能部は、GPS位置情報取得部11、進行方位情報取得部12、地図データベース13、マップマッチング部14、電源動作検出部15、推測位置決定部16、位置ずれ検出部17、自車位置決定部18、車両方位変更箇所判定部20、ナビゲーション用データ処理部30などである。
【0016】
なお、地図データベース13は、例えば、ハードディスクドライブ、DVD−ROMを備えたDVDドライブ、CD−ROMを備えたCDドライブ等のように、情報を記憶可能な記録媒体やその駆動装置といったハードウェアが構成要素の中心となっているが、地図情報を構成する道路データなどの記録や抽出のプログラムも含んでいる。地図データベース13は、所定の区画毎に分けられた地図情報が格納されており、図2にそのデータ構造が模式的に示されている。図2に示すように、地図情報は、交差点に対応する多数のノードnと、各交差点間を結ぶ道路に対応するリンクkとの接続関係により道路ネットワークを表す道路データを有している。各ノードnは、緯度及び経度で表現された地図上の位置(座標)の情報を有している。各リンクkは、ノードnを介して接続されている。また、各リンクkは、その属性情報として、道路種別、リンク長、道路幅、リンク形状を表現するための形状補間点等の情報を有している。ここで、道路種別情報は、例えば、高速道路、国道、県道、一般道、細街路、導入路等のように、道路を複数の種別に区分した際の道路種別の情報である。なお、図2においては、一つの区画の道路データのみを図示し、他の区画の道路データは省略している。
【0017】
GPS位置情報取得部11は、GPS測位によって自車両の位置を表す自車両位置情報を取得する機能を有する。このためGPS位置情報取得部11は、GPS受信機2と接続されている。GPS受信機2は、GPS(Global Positioning System)衛星からのGPS信号を受信する装置である。このGPS信号は、通常1秒おきに受信され、GPS位置情報取得部11へ出力される。GPS位置情報取得部11では、GPS受信機2で受信されたGPS衛星からの信号を解析し、自車両の現在位置(座標位置:緯度及び経度)を取得することができる。
【0018】
進行方位情報取得部12は、自車両の方位変化量と移動距離とによって自車両の進行挙動を表す進行方位情報(例えば進行ベクトルを規定するデータ)を取得する機能を有する。方位変化量及び移動距離を所定のサンプリング間隔で得ることで、サンプリング毎に自車両の位置を基点とした自車両の進行方位と進行距離、つまりサンプリング時間を少なくとも最小単位とする車両の進行挙動を表す進行ベクトルとしての車両の進行方位情報を取得することができる。このため進行方位情報取得部12は、方位センサ3及び距離センサ4と接続されている。方位センサ3は自車両Cの進行方位又はその進行方位の変化を検出するセンサである。この方位センサ3は、例えば、ジャイロスコープや、地磁気センサ等により構成される。そして、方位センサ3は、その検出結果を進行方位情報取得部12へ出力する。距離センサ4は、自車両の車速や移動距離を検出するセンサである。この距離センサ4は、例えば、車両のドライブシャフトやホイール等が一定量回転する毎にパルス信号を出力する車速パルスセンサ、自車両の加速度を検知するヨー・Gセンサ及び検知された加速度を積分する回路等により構成される。そして、距離センサ4は、その検出結果としての車速及び移動距離の測定信号を進行方位情報取得部12へ出力する。
【0019】
マップマッチング部14は、地図データベース13から自車位置周辺の地図情報を取得し、それに基づいて公知のマップマッチングを行う機能を有する。このマップマッチングにより、GPS位置情報取得部11から出力される自車両位置情報や進行方位情報取得部12から出力される進行方位情報による自車両の現在位置から最短の、地図情報に示される道路上における位置を探索する。この探索された位置は自車両道路上位置であり、この自車両道路上位置を自車位置決定部18はモニタ6に道路地図に重ねて表示する最終的な自車位置として決定する。つまり、自車両位置情報又は進行方位情報あるいはその両方による自車両の現在位置は、必要に応じてマップマッチング部14によって修正され、新たな自車両の現在位置となる。本出願では、この修正された自車両の現在位置に関する情報も自車位置に含まれるものとしている。
【0020】
電源動作検出部15は、進行方位情報取得部12を動作させる電源5aのオン・オフ(オン又はオフあるいはその両方)を検出する機能を有する。本実施形態においては、電源5aは、進行方位情報取得部12に電力を供給するだけでなく、コントロールユニット1を含む車載ナビゲーション装置の全体に電力を供給して動作させる。この電源5aとしては、例えば、自車両が備えるバッテリ等の蓄電装置が用いられる。そして、この電源5aのオン・オフは、ナビゲーション装置の主電源スイッチ5bにより切り替えられる。本実施形態においては、この主電源スイッチ5bの動作は、自車両Cが備える各電気機器に対する電源5aからの電力供給のオン又はオフを切り替えるアクセサリスイッチ(ACC)等の車両電源スイッチ5cに連動している。そして、電源動作検出部15は、このような主電源スイッチ5bの状態が、ナビゲーション装置に電力供給を行うオン状態であるか、そのような電力供給を遮断するオフ状態であるかを検出することにより、電源5aのオン又はオフを検出する。
【0021】
推測位置決定部16は、進行方位情報取得部12から出力される進行方位情報に基づいて推測航法の原理で自車両の推測位置を決定するが、この実施形態での推測位置決定部16は、進行方位情報取得部12から出力される進行方位情報に基づいて自車両の走行軌跡を生成して一時的に記憶する機能も有し、この走行軌跡の先頭部の位置が自車両の推測位置となる。つまり、車両の進行方位情報として所定時間毎の車両の進行挙動を表す進行ベクトルが入力されるので、順次その進行ベクトルをつなぎ合わせていくことで自車両の走行軌跡を生成することができ、そのように生成されていく走行軌跡の先頭部が最新の自車両の推測位置となる。走行軌跡が一時的に記憶されることで、最新のGPS測位に基づく自車両位置情報を取得するまでの自車両の走行軌跡やこの走行軌跡から算定される走行距離などを推測位置決定部16を通じて利用することができる。位置ずれ検出部17は、走行軌跡生成部16によって決定された自車両の推測位置と自車両位置情報(マップマッチング部14によって修正された自車両位置情報も含む)に基づく自車両位置との間の所定値以上の位置ずれを検出する機能を有する。
【0022】
自車位置決定部18は、最新のGPS測位に基づく自車両位置情報から得られるとともに必要に応じてマップマッチング部14によって修正された自車位置を自車両の推測位置に優先して真の自車位置として決定する。
【0023】
車両方位変更箇所判定部20は、位置ずれ検出部17によって所定値以上の位置ずれが検出されたときに、自車位置決定部18によって決定された自車両位置と推測航法に基づいた算定されている推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する機能を有する。なお、車両方位変更箇所判定部20によって判定された車両方位変更箇所、つまりターンテーブル設置箇所の位置を地図データベース13に与え、その地図情報に新規に認識されたターンテーブルとして追記させる。また、この実施形態では、車両方位変更箇所判定部20は、電源オン・オフ時自車位置記憶部21と走行距離記憶部22とを備えている。電源オン・オフ時自車位置記憶部21は、電源動作検出部15による、進行方位情報取得部12を動作させる電源のオン・オフ検出時の自車位置を記憶する。走行距離記憶部22は、推測位置決定部16で生成され記憶されている走行軌跡に基づく走行距離を記憶する。
【0024】
車両方位変更箇所判定部20の機能を図3及び図4を用いて説明する。図3は、位置ずれ検出部17によって位置ずれが検出され、モニタ6の画面において、自車位置マークが推測航法に基づいて算定されたいる推測位置から最新のGPS測位に基づく自車位置に位置飛びした状態を示している。図4は、位置飛び発生時の位置飛び元である推測位置と位置飛び先である自車両位置とから車両方位変更箇所としてのターンテーブル設置箇所を特定する判定処理を模式的に説明する説明図である。なお、図3及び図4において位置飛び元である推測位置は図番Pで、位置飛び先である自車両位置は図番Mで示され、図3においてターンテーブル設置箇所は図番TTで示されている。
【0025】
位置飛びが発生すると、車両方位変更箇所判定部20は、位置飛び元である推測位置:Pと位置飛び先である自車両位置:Mとを連結する連結線:L1に対する垂直二等分線:L2を生成する。推測航法を原理としている推測位置決定部16は、絶対的な方位を検出していないので、出発方位が誤っていると、真の自車位置とは全く異なる推測位置を決定することになるが、その推測位置が作り出していく走行軌跡の幾何学的な形状は真の走行軌跡と良好に類似している。例えば、出発方位の誤りが車両ターンテーブルに起因するとすれば、推測位置:Pを出発方位の誤り角度分だけ出発点回りで回転させた位置に自車両位置:Mがくることになる。言い換えると、上記垂直二等分線:L2の上、少なくともその近傍に車両方位変更箇所としての車両ターンテーブル設置場所が位置することになる。本発明を特徴付けている車両方位変更箇所判定部20の判定アルゴリズムはこのような本願発明者の知見に基づいている。
【0026】
図4から理解できるように、出発方位の誤り角度がθとすると、垂直二等分線:L2上の点:Rと推測位置:Pとを結ぶ直線:PRと、点:Rと自車両位置:Mとを結ぶ直線:RMとがなす角度がθとなる点:Rの位置に車両を角度θ(正負号は考慮される)だけ方位変更する車両ターンテーブルが設置されていることになる。例えば、出発方位の誤り角度が180°とすると、つまり車両ターンテーブルが180°車両ターンテーブルとすれば、推測位置:Pと自車両位置:Mとを連結する連結線:L1を2等分する中点(直線:PRと直線:RMとがなす角度が180°となる点:R)に180°車両ターンテーブルが設置されていると判定することができる。あるいは、車両ターンテーブルが90°車両ターンテーブルとすれば、垂直二等分線:L2の一方側に位置する、直線:PRと直線:RMとがなす角度が90°となる点:Rに90°車両ターンテーブルが設置されていると判定することができる。
【0027】
車両ターンテーブルの回転角度が特定できない場合、垂直二等分線:L2上の無数の点が車両ターンテーブル設置箇所の候補となるが、車両ターンテーブルが道路に面している場所にある(田畑の真ん中にはない)という条件を加味すると、候補が絞られ、たいていの場合、両ターンテーブル設置箇所を特定することができる。道路が密集しており、多くの車両ターンテーブル設置箇所の候補が存在することを想定する場合、以下のような追加の判定条件によって車両ターンテーブル設置箇所を特定することができる。
(1)走行距離記憶部22が備えられている実施形態では、推測位置決定部16によって生成された推測位置情報を走行距離記憶部22から読み出し算定された走行距離と直線:PR又は直線:RMの距離が類似する点でかつ道路に面した点を車両ターンテーブル設置箇所とみなす。推測位置情報から走行距離を算定する方法として代表的なものの1つは、走行開始時の推測位置と位置飛び時の推測位置とからその直線距離を演算して直線走行距離を求めることであり、他の一つは、走行開始時から位置飛び時までの間に決定された推測位置に基づいて生成される走行軌跡の積算値としての実走行距離から、例えば所定の係数をかけて直線走行距離を演算して求めることである。この走行距離条件により、車両ターンテーブル設置箇所としての垂直二等分線:L2上の1点を特定することができる。
(2)電源オン・オフ時自車位置記憶部21が備えられている実施形態では、電源オン・オフ検出時の自車位置をから読み出し、この自車位置の周辺領域に含まれておりかつ道路に面した点を車両ターンテーブル設置箇所とみなす。
(3)車両ターンテーブルの回転角度の多くが180°で、場合によっては90°であることを考慮して、車両ターンテーブルを180°または90°とみなし、直線:PRと直線:RMとがなす角度:θが180°または90°となる点でかつ道路に面した点を車両ターンテーブル設置箇所とみなす。さらに、車両ターンテーブルは180°車両ターンテーブルであると限定するなら、推測位置:Pと自車両位置:Mとを連結する連結線:L1の2等分点を車両ターンテーブル設置箇所とみなすことができ、一意的に車両ターンテーブル設置箇所を判定することができ、垂直二等分線:L2の作成が不要となる副次的な効果もある。
【0028】
ナビゲーション用データ処理部30は、自車位置表示、出発地から目的地までの経路探索、目的地までの経路案内、目的地検索等のナビゲーション機能を作り出す。例えば、ナビゲーション用データ処理部30は、マップマッチング部14で決定された自車位置としての自車両道路上位置に基づいて地図データベース13から自車両周辺の地図情報を取得してモニタ6の表示画面に地図の画像を表示するとともに、当該地図の画像上に、自車両の現在位置及び進行方位を表す自車位置マークを重ね合わせて表示する。また、ナビゲーション用データ処理部30は、地図データベース13に記憶された地図情報に基づいて、所定の出発地から目的地までの経路探索を行う。さらに、ナビゲーション用データ処理部30は、探索された出発地から目的地までの経路と自車位置とに基づいて、モニタ6及びスピーカ7の一方又は双方を用いて、運転者に対する経路案内を行う。モニタ6には操作デバイス8として機能するタッチパネルが装着されているが、これとは別な操作スイッチや操作ボタンを操作デバイス8として付加してもよい。
【0029】
次に、上述のように構成された車載ナビゲーション装置において、位置飛びが発生した際にこの位置飛び現象を利用して、車両方位変更箇所としてのターンテーブル設置箇所を判定して地図データベース13に登録する制御ルーチンを説明する。なお、この制御ルーチンでは、説明を簡単にするため、ターンテーブルとして180°ターンテーブルと90°ターンテーブルだけを取り扱うことにする。図5はその制御ルーチンを示すフローチャートである。
【0030】
図5の制御ルーチンは、車両方位変更させたターンテーブルから車両が出たところでスタートしている。車両が始動してからしばらくの間は、GPS位置情報取得部11は新しい自車位置情報を出力できないので、進行方位情報による自車両の推測位置の決定とその一時記憶だけが推測位置決定部16によって行われる(#01)。この推測位置の生成と記憶はGPS位置情報取得部11が新しいGPS信号に基づいた自車両位置情報を取得して出力するまで続けられる(#02)。自車両位置情報が出力されると(#02Yes分岐)、最新の推測位置が読み出される(#03)。GPSに基づく自車両位置情報から読み出された自車両位置と最新の推測位置とを比較して位置ずれがチェックされる(#04)。位置ずれ量が判定閾値としての所定値未満であれば(#04Yes分岐)、ターンテーブルによる車両の方位変更がなかったとみなしてこのルーチンを終了する。位置ずれ量が所定値を越えていれば(#04No分岐)、ターンテーブルによる車両の方位変更が発生していたとして、上述したような位置飛び処理がナビゲーション用データ処理部30で行われるとともに、このルーチンでは以下のようなターンテーブル設置箇所判定処理を行う。
【0031】
まず、図4に示しているように、位置飛び元である推測位置:Pと位置飛び先である自車両位置:Mとを連結する連結線:L1を生成する(#05)。この連結線:L1の中点:R180が180°ターンテーブルの設置箇所と推測されるので、この中点:R180を算定し、180°ターンテーブル候補点とする(#06)。次にこの180°ターンテーブル候補点の信憑性を評価する(#07)。この信憑性評価、つまりターンテーブルの特定には種々の判定条件を用いることができる。ここでは次の条件が例示される。
(a)この候補点座標と道路データとを比較して、この候補点に車両がアクセスできるかどうか判定する。
(b)電源オン・オフ時自車位置記録部21から読み出された電源オン・オフ検出時の自車位置を中心とする所定範囲の周辺領域に候補点が含まれているかどうか判定する。
(c)走行距離記憶部22から読み出された走行距離と直線PR180又は直線MR180の長さが所定許容誤差内で一致するかどうか判定する。
(a)から(c)のなかで1つだけ採用すれば十分であるが、(a)を採用した場合、電源オン・オフ時自車位置記録部21や走行距離記憶部22が不要となるので構成が簡単となる。
【0032】
いずれにせよ、候補点の評価の結果、180°ターンテーブルが特定されたかどうかチェックされる(#08)。判定条件が満たされず180°ターンテーブルが特定されなかった場合(#08No分岐)、このルーチンを終了する。判定条件が満たされ180°ターンテーブルが特定された場合(#08Yes分岐)、地図データベース13にアクセスして地図情報にこの180°ターンテーブルに関する情報を登録する(#09)。
【0033】
判定条件が満たされずに特定されなかった場合(#08No分岐)、さらに90°ターンテーブルでの信憑性評価を以下のように行う。まず、連結線:L1に対する垂直二等分線:L2を生成する(#11)。次に、垂直二等分線:L2上で、推測位置:Pと自車両位置:Mとの間の角度θが90°となる点:Rを算定し、180°ターンテーブル候補点とする(#12)。さらに、この90°ターンテーブル候補点の信憑性を評価する(#13)。この信憑性評価の判定条件は上述した(a)(b)(c)などを用いることができる。ここでも、候補点の評価の結果、90°ターンテーブルが特定されたかどうかチェックされる(#14)。判定条件が満たされず180°ターンテーブルが特定されなかった場合(#14No分岐)、このルーチンを終了する。判定条件が満たされ90°ターンテーブルが特定された場合(#14Yes分岐)、地図データベース13にアクセスして地図情報にこの90°ターンテーブルに関する情報を登録する(#15)。
〔その他の実施形態〕
【0034】
(1) 上述した実施の形態の説明では、車両方位変更設備としてターンテーブル取り上げたが、トランバーサのような設備で車両の方位や位置を変更させる設備に対しても本発明による車両方位変更箇所の判定を適用することも可能である。さらには、方位センサ3や距離センサ4で正確にトレースできない切り返し操作が必要となる箇所の判定にも適用可能である。
(2) 上述した制御ルーチンでは、方向変更箇所として180度ターンテーブル設置箇所と90°ターンテーブル設置箇所に限定されていが、それ以外の方位変更回転角をもつ方向変更箇所ないしはターンテーブル設置箇所も同様な方法で特定することができる。つまり、図5におけるステップ#12からステップ#15の処理をθの値を順次変更しながら繰り返し処理することで、要求される方位変更回転角をもつ方向変更箇所(ターンテーブル設置箇所)をすべてチェックすることができる。
(3) 上述した制御ルーチンでは、特定されたターンテーブルの位置や方位変更角度などの情報は自己の地図データベース13に登録されていたが、通信回線やその他のデータ転送手法を用いて外部の地図データベースに登録するような構成も本発明に含まれる。
【図面の簡単な説明】
【0035】
【図1】本発明の1つの実施形態に係る車載ナビゲーション装置を示す機能ブロック図
【図2】地図データベースに格納されている道路データを模式的に示す模式図
【図3】、自車位置マークが推測航法に基づいて算定された推測位置から最新のGPS測位に基づく自車位置に位置飛びした状態を示すモニタ画面図
【図4】位置飛びが発生した時に車両方位変更箇所としてのターンテーブル設置箇所を判定するアルゴリズムを模式的に説明する説明図
【図5】ターンテーブル設置箇所を判定して地図データベースに登録する制御ルーチンを示すフローチャート
【符号の説明】
【0036】
11:GPS位置情報取得部
12:進行方位情報取得部
13:地図データベース
15:電源動作検出部
16:推測位置決定部
17:位置ずれ検出部
18:自車位置決定部
20:車両方位変更箇所判定部
21:電源オン・オフ時自車位置記憶部
22:走行距離記憶部
TT:ターンテーブル(車両方位変換設備)
【特許請求の範囲】
【請求項1】
GPS測位によって自車両の位置を表す自車両位置情報を取得するGPS位置情報取得部と、
自車両の方位変化量と移動距離とによって自車両の進行方位を表す進行方位情報を取得する進行方位情報取得部と、
前記進行方位情報に基づいて自車両の推測位置を決定する推測位置決定部と、
前記推測位置と前記自車両位置情報に基づく自車両位置との間の所定値以上の位置ずれを検出する位置ずれ検出部と、
前記位置ずれ検出部による位置ずれ検出時に前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する車両方位変更箇所判定部と、
を備えた車載ナビゲーション装置。
【請求項2】
前記車両方位変更箇所判定部において前記自車両位置と前記推測位置とを結ぶ直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する際に、始動からの走行距離が判定条件として用いられる請求項1に記載の車載ナビゲーション装置。
【請求項3】
前記車両方位変更箇所判定部は、前記自車両位置と前記推測位置との中心点を車両ターンテーブル設置箇所であると判定する請求項1又は2に記載の車載ナビゲーション装置。
【請求項4】
前記車両方位変更箇所判定部は、前記車両ターンテーブル設置箇所を180°車両ターンテーブル設置箇所と判定する請求項1から3のいずれか一項に記載の車載ナビゲーション装置。
【請求項5】
前記進行方位情報取得部を動作させる電源のオン・オフを検出する電源動作検出部が備えられ、前記車両方位変更箇所判定部において前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する際に、当該車両方位変更箇所が前記電源動作検出部による電源オン・オフ検出時の自車位置の周辺領域に含まれていることを必要条件とする請求項1から4のいずれか一項に記載の車載ナビゲーション装置。
【請求項6】
前記判定された車両方位変更箇所が地図データベースに記録される請求項1から5のいずれか一項に記載の車載ナビゲーション装置。
【請求項7】
GPS測位によって自車両の位置を表す自車両位置情報を取得するGPS位置情報取得部と、自車両の方位変化量と移動距離とによって自車両の進行方位を表す進行方位情報を取得する進行方位情報取得部と、前記進行方位情報に基づいて自車両の推測位置を決定する推測位置決定部とを備えた車載ナビゲーション装置を制御するコンピュータにより実行されるプログラムであって、
前記推測位置と前記自車両位置情報に基づく自車両位置との間の所定値以上の位置ずれを検出する位置ずれ検出ステップと、前記位置ずれ検出ステップによる位置ずれ検出時に前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する判定ステップと、をコンピュータに実行させる車両方位変更箇所判定プログラム。
【請求項1】
GPS測位によって自車両の位置を表す自車両位置情報を取得するGPS位置情報取得部と、
自車両の方位変化量と移動距離とによって自車両の進行方位を表す進行方位情報を取得する進行方位情報取得部と、
前記進行方位情報に基づいて自車両の推測位置を決定する推測位置決定部と、
前記推測位置と前記自車両位置情報に基づく自車両位置との間の所定値以上の位置ずれを検出する位置ずれ検出部と、
前記位置ずれ検出部による位置ずれ検出時に前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する車両方位変更箇所判定部と、
を備えた車載ナビゲーション装置。
【請求項2】
前記車両方位変更箇所判定部において前記自車両位置と前記推測位置とを結ぶ直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する際に、始動からの走行距離が判定条件として用いられる請求項1に記載の車載ナビゲーション装置。
【請求項3】
前記車両方位変更箇所判定部は、前記自車両位置と前記推測位置との中心点を車両ターンテーブル設置箇所であると判定する請求項1又は2に記載の車載ナビゲーション装置。
【請求項4】
前記車両方位変更箇所判定部は、前記車両ターンテーブル設置箇所を180°車両ターンテーブル設置箇所と判定する請求項1から3のいずれか一項に記載の車載ナビゲーション装置。
【請求項5】
前記進行方位情報取得部を動作させる電源のオン・オフを検出する電源動作検出部が備えられ、前記車両方位変更箇所判定部において前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する際に、当該車両方位変更箇所が前記電源動作検出部による電源オン・オフ検出時の自車位置の周辺領域に含まれていることを必要条件とする請求項1から4のいずれか一項に記載の車載ナビゲーション装置。
【請求項6】
前記判定された車両方位変更箇所が地図データベースに記録される請求項1から5のいずれか一項に記載の車載ナビゲーション装置。
【請求項7】
GPS測位によって自車両の位置を表す自車両位置情報を取得するGPS位置情報取得部と、自車両の方位変化量と移動距離とによって自車両の進行方位を表す進行方位情報を取得する進行方位情報取得部と、前記進行方位情報に基づいて自車両の推測位置を決定する推測位置決定部とを備えた車載ナビゲーション装置を制御するコンピュータにより実行されるプログラムであって、
前記推測位置と前記自車両位置情報に基づく自車両位置との間の所定値以上の位置ずれを検出する位置ずれ検出ステップと、前記位置ずれ検出ステップによる位置ずれ検出時に前記自車両位置と前記推測位置とを結ぶ直線の中点または当該直線の垂直二等分線上に位置する点を車両方位変更箇所と判定する判定ステップと、をコンピュータに実行させる車両方位変更箇所判定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−107457(P2010−107457A)
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願番号】特願2008−281927(P2008−281927)
【出願日】平成20年10月31日(2008.10.31)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願日】平成20年10月31日(2008.10.31)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]