
車載ナビゲーション装置

【課題】車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する機会を増加させることによって、車両が走行している道路を正確に認識する可能性を向上させることができること。
【解決手段】カメラ80によって撮影された車両周辺の画像に、車両が一般道路を走行していることを特定するための一般道路特定画像、または車両が高速道路を走行していることを特定するための高速道路特定画像が含まれているか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することができる。このようにすることにより、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する機会を増加させることができる。この結果、車両が走行している道路を正確に認識する可能性を向上させることができる。
【解決手段】カメラ80によって撮影された車両周辺の画像に、車両が一般道路を走行していることを特定するための一般道路特定画像、または車両が高速道路を走行していることを特定するための高速道路特定画像が含まれているか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することができる。このようにすることにより、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する機会を増加させることができる。この結果、車両が走行している道路を正確に認識する可能性を向上させることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載ナビゲーション装置に関する。
【背景技術】
【0002】
従来、CCDカメラ等によって得られる車両周辺の画像情報を用いることにより、自車の現在位置をより高精度に検出し修正することのできるマップマッチング機能を有する車載ナビゲーション装置が提案されている(例えば、特許文献1参照。)。この特許文献1に開示されている車載ナビゲーション装置によれば、例えば、当該装置が車両の周辺映像を収集し、周辺映像から交差点を特徴付ける信号機や一時停止線等が識別できた場合には、当該装置は自車の現在位置が一般道路上にあると判定することが可能であった。
【特許文献1】特開平09−152348号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述した従来の装置では、例えば、交差点を特徴付ける信号機や一時停止線等を有さない一般道路と高速道路とが近接している場合に、自車が当該一般道路を走行中にディスプレイ上に表示された自車マークが高速道路上に誤表示されることが考えられる。この場合、自車マークが表示されている高速道路に近接している一般道路には、交差点を特徴付ける信号機や一時停止線等を有さないため、ディスプレイ上に表示された自車マークが高速道路上に誤表示された状態が継続してしまう。このため、従来の装置は自車が走行している道路が高速道路であると誤認識してしまうことがあった。すなわち、従来の装置は自車が走行している道路を正確に認識することができないことがあった。
【0004】
このような問題は、車両の周辺映像から交差点を特徴付ける信号機や一時停止線等が識別できた場合に限り、自車の現在位置が一般道路上にあると判定することしかできなかったために起こりえた。換言すると、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する機会が少なかったため、このような問題が起こりえた。
【0005】
本発明は、上述した点に鑑みてなされたもので、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する機会を増加させることによって、車両が走行している道路を正確に認識する可能性を向上させることが可能な車載ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、請求項1に記載の車載ナビゲーション装置は、
車両の現在位置を検出する現在位置検出手段と、
少なくとも高速道路と一般道路とを区分けするための道路種別情報を含む道路地図データを記憶する道路地図データ記憶手段と、
車両周辺の状況を撮影する撮影手段と、
車両が一般道路を走行していることを特定するための一般道路特定画像を記憶する第1の記憶手段と、
車両が高速道路を走行していることを特定するための高速道路特定画像を記憶する第2の記憶手段と、
前記撮影された車両周辺の画像に前記一般道路特定画像または前記高速道路特定画像が含まれるか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する判定手段と、
前記判定手段の判定結果に応じて、前記車両が走行している道路を認識する走行道路認識手段とを備えることを特徴とする。
【0007】
上述したように、請求項1に記載の車載ナビゲーション装置では、撮影された車両周辺の画像に、車両が一般道路を走行していることを特定するための一般道路特定画像、または車両が高速道路を走行していることを特定するための高速道路特定画像が含まれているか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する。このようにすることにより、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する機会を増加させることができる。この結果、車両が走行している道路を正確に認識する可能性を向上させることができる。
【0008】
請求項2に記載したように、判定手段は、撮影された車両周辺の画像内におけるオブジェクトと、一般道路特定画像と高速道路特定画像とのいずれか一方とがパターンマッチングするか否かを判定するパターンマッチング判定手段を有し、パターンマッチング判定手段の判定結果に基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することが好ましい。このようにすることにより、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することができる。
【0009】
請求項3に記載したように、一般道路特定画像及び高速道路特定画像は、一般道路及び高速道路特有の特徴物を含む画像を撮影し、その撮影した画像に対して、ノイズ除去処理、二値化処理、及びエッジ検出処理の少なくともいずれか1つの処理を施すことによって生成されることが好ましい。このようにすることにより、一般道路特定画像及び高速道路特定画像が生成される。
【0010】
請求項4に記載したように、第1の記憶手段は、一般道路特定画像として、信号機、一般道路の路面に記された記号及び文字である一般道路専用標示、一般道路専用標示板、及び光ビーコンの画像を記憶することが好ましい。信号機、一般道路の路面に記された記号及び文字である一般道路専用標示、一般道路専用標示板、及び光ビーコンは、一般道路に関する特有なものであるため、これら信号機等の画像と、撮影された車両周辺の画像内におけるオブジェクトとがパターンマッチングする場合、車両の現在位置が一般道路上にあると考えることができる。
【0011】
請求項5に記載したように、第2の記憶手段は、高速道路特定画像として、ETCゲート、料金所、高速道路の路面に記された記号及び文字である高速道路専用標示、高速道路専用標示板、及び電波ビーコンの画像を記憶することが好ましい。ETCゲート、料金所、高速道路の路面に記された記号及び文字である高速道路専用標示、高速道路専用標示板、及び電波ビーコンは、高速道路に関する特有なものであるため、これらETCゲート等の画像と、撮影された車両周辺の画像内におけるオブジェクトとがパターンマッチングする場合、車両の現在位置が高速道路上にあると考えることができる。
【0012】
請求項6に記載したように、表示部と、表示部において、道路地図データに基づく道路地図と車両の現在位置とを表示する表示制御手段とを備え、表示制御手段は、判定手段の判定結果が、車両の現在位置が表示されている道路の道路種別とが異なる場合には、一般道路と高速道路とが重なっている位置に車両の現在位置が表示されている場合を除いて、判定手段が判定した道路種別の道路上に、車両の現在位置を変更して表示することが好ましい。これにより、高速道路と一般道路とが近接している場合に、車両の現在位置が誤って表示されているときに、運転者が操作をすることなく、自動的に車両の現在位置を正確に設定することができる。
【0013】
請求項7に記載したように、道路地図データを用いて車両を目的地に案内するための案内経路を探索する案内経路探索手段と、案内経路探索手段によって探索された案内経路に従って経路案内を行なう経路案内手段と、経路案内手段による経路案内中に、表示制御手段によって車両の現在位置が変更される場合に、その変更後の現在位置からの案内経路を探索するように案内経路探索手段に対して指示する指示手段とを備え、表示制御手段は、変更後の現在位置と、指示手段の指示によって探索された案内経路とを表示部に表示することもできる。これにより、経路案内中に、誤って車両の現在位置が表示されているときに、運転者が操作をすることなく、自動的に車両の現在位置を正確に設定するとともに、その正確な現在位置からの案内経路を探索できる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の好ましい実施形態について図面を参照して説明する。図1は、本実施形態による車載ナビゲーション装置100の概略構成を示すブロック図である。以下、本実施形態による車載ナビゲーション装置について詳細に説明する。
【0015】
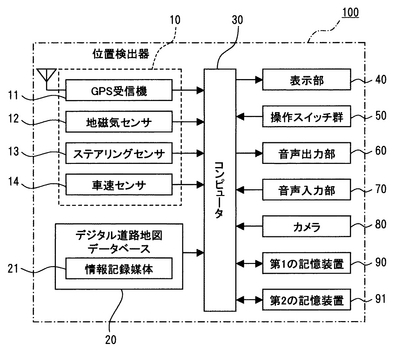
図1に示すように、車載ナビゲーション装置100は、位置検出器10、デジタル道路地図データベース20、コンピュータ30、表示部40、操作スイッチ群50、音声出力部60、音声入力部70、カメラ80、第1の記憶装置90、及び第2の記憶装置91を備えている。
【0016】
コンピュータ30は、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインを備えている。ROMには、コンピュータ30が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0017】
位置検出器10は、衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機11、車両の絶対方位を検出するための地磁気センサ12、車両の相対方位を検出するためのステアリングセンサ13を有している。さらに、位置検出器10は、車両の走行速度から走行距離を検出するために車速センサ14を備えている。
【0018】
このように、位置検出器10は、電波航法による車両位置測定のためにGPS受信機11を有するとともに、自立航法による車両位置推定のために地磁気センサ12、ステアリングセンサ13及び車速センサ14を有している。また、電波航法としては、GPSに限らず、例えばVICSの光ビーコンを利用しても良い。また、自立航法における車両の相対方位を検出するために、ステアリングセンサ13に代えて、ジャイロセンサや車両の左右輪に設けられた車輪速センサを用いても良い。
【0019】
デジタル道路地図データベース20は、道路データ、背景データ、文字データ及び施設データなどを含むデジタル地図データをコンピュータ30に入力するための装置である。デジタル道路地図データベース20は、デジタル地図データを記憶する情報記憶媒体21を有し、情報記憶媒体21としては、そのデータ量からCD−ROMまたはDVD−ROMを用いるのが一般的であるが、メモリカード、ハードディスク等を用いてもよい。
【0020】
ここで、道路データの構成について説明する。道路データは、道路毎に固有の番号を付したリンクID、リンク座標データ、ノード座標データ、高速道路や一般道路等の道路種別を示す道路種別データ、道路幅員データ等の各データから構成されている。道路データにおけるリンクとは、地図上の各道路を、交差点、分岐点などを示すノードにより複数に分割し、そして2つのノード間をリンクとして規定したものである。そして、リンク座標データには、このリンクの始端と終端の座標が記述される。なお、リンクの途中にノードが含まれる場合には、ノード座標データにノード座標が記述される。この道路データは、地図を表示する以外に、マップマッチング処理を行なう際の道路の形状を与えるために用いられたり、目的地までの案内経路を検索する際に用いられる。
【0021】
背景データは、道路地図を表示部40に表示する際に、道路以外の表示対象となる施設形状、自然地形等を表示するためのデータである。文字データは、地名、施設名、道路名等を道路地図上に表示するためのものであり、表示位置に対応する地図上の座標を関連付けたデータとして構成している。
【0022】
表示部40は、例えば、液晶ディスプレイによって構成され、表示部40の画面には車両の現在位置に対応する自車位置マーク、及び、デジタル道路地図データベース20より入力された地図データによって生成される車両周辺の道路地図を表示することができる。また、目的地が設定された場合、道路地図上には、現在位置から目的地までの案内経路が重ねて表示される。
【0023】
操作スイッチ群50は、例えば、表示部40と一体になったタッチパネルスイッチもしくは表示部40の周辺に設けられるメカニカルなスイッチ等からなり、各種入力に使用される。
【0024】
音声出力部60はスピーカ等からなり、経路案内が行なわれている場合に、案内音声を出力したり、音声認識時に、入力音声に関するガイダンスを出力したりするものである。また、音声入力部70は、マイク等からなり、ユーザによって発せられた音声を取り込んで、コンピュータ30に入力する。コンピュータ30は、入力された音声の認識処理を行い、その認識結果に基づいて、各種の制御を実行する。
【0025】
カメラ80は、例えば、助手席側のドアのドアミラー付近に設けられたCCDカメラであり、車両周辺の状況を撮影するためのものである。また、カメラ80は、車両の夜間走行時における車両周辺の状況を撮影するために赤外線照射器を有する。
【0026】
第1の記憶装置90には、一般道路特定画像が記憶されている。この一般道路特定画像は、一般道路特有の特徴物(例えば、信号機、一般道路専用標識、一般道路専用標示、及び光ビーコンなど)を含む画像を撮影し、その撮影した画像に対して、エッジ検出処理を施すことによって生成されたものである。エッジ検出処理とは、画像の明るさの変化によりオブジェクトの輪郭を算出する処理のことである。また、ノイズ除去処理、及び二値化処理の少なくともいずれか1つの処理を施すことによっても一般道路特定画像が生成される。このようにすることにより、一般道路特定画像が生成される。
【0027】
第2の記憶装置91には、高速道路特定画像が記憶されている。この高速道路特定画像は、高速道路特有の特徴物(例えば、ETCゲート、料金所、高速道路専用標識、高速道路専用標示、及び電波ビーコンなど)を含む画像を撮影し、その撮影した画像に対して、エッジ検出処理を施すことによって生成されたものである。エッジ検出処理とは、画像の明るさの変化によりオブジェクトの輪郭を算出する処理のことである。また、ノイズ除去処理、及び二値化処理の少なくともいずれか1つの処理を施すことによっても高速道路特定画像が生成される。このようにすることにより、高速道路特定画像が生成される。
【0028】
また、本実施形態の車載ナビゲーション装置100は、車両の現在位置の周囲において、高速道路と一般道路とが近接している場合に、カメラ80が車両周辺の状況を撮影し、この撮影された車両周辺の画像内におけるオブジェクトと、第1の記憶装置90に記憶されている一般道路特定画像と第2の記憶装置91に記憶されている高速道路特定画像とのいずれか一方とがパターンマッチングするか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する現在位置判定機能も備えている。
【0029】
さらに、本実施形態の車載ナビゲーション装置100は、操作スイッチ群50もしくは音声認識によって目的地の位置が入力されると、現在位置からその目的地までの最適な経路を自動的に選択して案内経路を形成し表示する、いわゆる経路案内機能も備えている。このような自動的に最適な経路を設定する手法は、周知のダイクストラ法等の手法が知られている。また、ユーザによって入力された、例えば、住所、施設名称、電話番号等から施設等の位置を検索する検索機能も備えている。
【0030】
これらの機能は、主にコンピュータ30によって各種の演算処理がなされることによって実行される。すなわち、コンピュータ30は目的地が入力されるとデジタル道路地図データベース20の地図データを用いて経路を計算し、その経路を表示する。この他、コンピュータ30は、車両の位置を示す自車位置マークとその周辺の道路地図を表示部40に表示させたり、道路地図の縮尺を変更したりする。
【0031】
次に、本実施形態における現在位置変更処理について、図2及び図3のフローチャートを用いて詳細に説明する。なお、図2は、現在位置変更処理のメインルーチンを示すフローチャートであり、図3は、現在位置判定処理のルーチンを示すフローチャートである。
【0032】
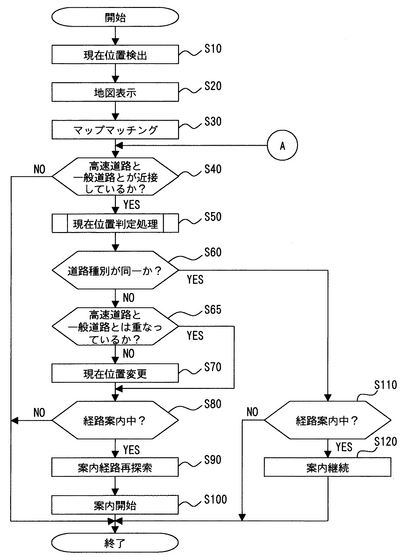
まず、図2のステップS10では、車両の現在位置を検出する。このとき、GPS受信機11による位置データは、上述の道路データの座標データ(緯度と経度)と同じ形態で取得される。また、地磁気センサ12、ステアリングセンサ13、車速センサ14によって自車両の進行方向及び走行距離に関するデータが取得され、過去に算出、もしくは確定された車両位置を基準として、現在位置の座標データの算出を行なう(自立航法による座標データの算出)。なお、現在位置は、基本的には、自立航法により算出された座標データに基づいて求められる。ただし、GPS受信機11による位置データが取得されている場合には、両者を比較し、その差が所定距離以上である場合には、現在位置として、GPS受信機11による位置データを採用する。
【0033】
ステップS20では、車両の現在位置を含む、周辺地図の地図データがデジタル道路地図データベース20から読み込まれ、表示部40に表示される。ステップS30では、マップマッチング処理が行なわれる。例えば、ステップS10にて算出した現在位置と所定距離以内の道路、もしくは既に道路上にマッチングされている場合には、そのマッチング道路に接続された道路を車両が走行する可能性のある道路として特定する。そして、ステップS10にて過去に算出された複数個の現在位置と最新の現在位置とを連結して、走行軌跡が算出される。その走行軌跡の形状と、車両が走行する可能性のある道路の形状とを比較して、最も相関の高い道路を車両が走行している道路と推定する。これにより、ステップS10において取得された現在位置を表示すべき道路が決定される。
【0034】
なお、ステップS10における現在位置の算出、及び上述した走行軌跡の算出は、GPS受信機11の位置データのみから行なっても良いし、自立航法の位置データのみから行なっても良い。
【0035】
ステップS40では、車両の現在位置の周囲において、高速道路と一般道路とが近接しているか否かを判定する。具体的には、例えば、高速道路と一般道路とが並走している場合である。近接していない場合には、処理が終了される。一方、近接している場合には、ステップS50に進む。
【0036】
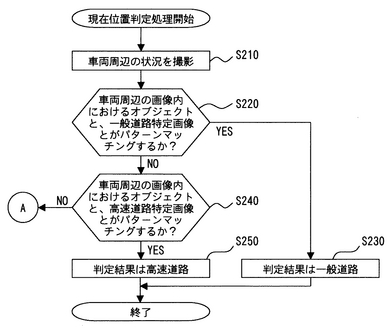
ステップS50では、現在位置判定処理が実行される。この現在位置判定処理を図3のフローチャートを用いて説明する。
【0037】
図3のフローチャートにおいて、まずステップS210では、カメラ80が車両周辺の状況を撮影し、この撮影された車両周辺の画像がコンピュータ30に出力される。
【0038】
ステップS220では、ステップS210にて撮影された車両周辺の画像内におけるオブジェクトと、第1の記憶装置90に記憶されている一般道路特定画像とがパターンマッチングするか否かを判定する。具体的には、例えば、コンピュータ30は、車両周辺の画像に対して、エッジ検出処理を施す。エッジ検出処理が施された車両周辺の画像内において、当該画像内のオブジェクトが特定される。この特定されたオブジェクトと、第1の記憶装置90に記憶されている一般道路特定画像とが一致する又は相似であるか否かを判定する。一致する又は相似であると判定された場合、ステップS230に進む。ステップS230では、車両の現在位置は一般道路上にあると判定される。そして、コンピュータ30は、車両が走行している道路は一般道路であると認識する。具体的には、例えば、コンピュータ30は、車両が走行している道路の道路種別として、「一般道路」をコンピュータ30のRAMに記憶する。信号機、一般道路の路面に記された記号及び文字である一般道路専用標示、一般道路専用標示板、及び光ビーコンは、一般道路に関する特有なものであるため、これら信号機等の画像と、撮影された車両周辺の画像内におけるオブジェクトとがパターンマッチングする場合、車両の現在位置が一般道路上にあると考えることができる。
【0039】
ステップS220において、一致しない又は相似でないと判定された場合、ステップS240に進む。ステップS240では、ステップS220と同様にして、ステップS210にてエッジ検出処理が施された車両周辺の画像内において、特定された当該画像内のオブジェクトと、第2の記憶装置91に記憶されている高速道路特定画像とが一致する又は相似であるか否かを判定する。一致しない又は相似でないと判定された場合、ステップS40に戻る。一方、一致する又は相似であると判定された場合、ステップS250に進む。ステップS250では、車両の現在位置は高速道路上にあると判定される。そして、コンピュータ30は、車両が走行している道路は高速道路であると認識する。具体的には、例えば、コンピュータ30は、車両が走行している道路の道路種別として、「高速道路」をコンピュータ30のRAMに記憶する。ETCゲート、料金所、高速道路の路面に記された記号及び文字である高速道路専用標示、高速道路専用標示板、及び電波ビーコンは、高速道路に関する特有なものであるため、これらETCゲート等の画像と、撮影された車両周辺の画像内におけるオブジェクトとがパターンマッチングする場合、車両の現在位置が高速道路上にあると考えることができる。
【0040】
このように、現在位置判定処理を実行することにより、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することができる。
【0041】
図2のフローチャートに戻り、ステップS60に進む。ステップS60では、道路種別が同一であるか否かを判定する。すなわち、ステップS30おいて決定された現在位置を表示する道路の道路種別と、ステップS50にて判定された現在位置が表示されるべき道路の道路種別とが異なるか否かを判定する。道路種別が同一であると判定された場合、ステップS110に進む。ステップS110では、経路案内中か否かを判定する。経路案内中ではないと判定された場合、処理が終了される。一方、経路案内中であると判定された場合、ステップS120に進む。ステップS120では、経路案内が継続される。
【0042】
一方、ステップS60において、道路種別が異なると判定された場合、ステップS65に進む。ステップS65では、道路地図上において、車両の現在位置の周囲において、高速道路と一般道路とが重なっているか否かを判定する。重なっていないと判定された場合、ステップS70に進む。ステップS70では、ステップS50にて判定された結果に基づいて、現在位置が変更される。具体的には、例えば、表示部40において、車両の現在位置が表示さている高速道路に対して、近接している道路種別の異なる一般道路上に車両の現在位置が変更される。これにより、高速道路と一般道路とが近接している場合に、車両の現在位置が誤って表示されているときに、運転者が操作をすることなく、自動的に車両の現在位置を正確に設定することができる。
【0043】
ステップS65において、重なっていると判定された場合、ステップS80に進む。ステップS80では、経路案内中か否かを判定する。経路案内中ではないと判定された場合、処理が終了される。一方、経路案内中であると判定された場合、ステップS90に進む。
【0044】
ステップS90では、案内経路が再探索される。具体的には、例えば、ステップS70にて変更された車両の現在位置が新たな開始点とされ、周知のダイクストラ法等の手法によって、この開始点から目的地までの最適な案内経路が探索される。これにより、経路案内中に、誤って車両の現在位置が表示されているときに、運転者が操作をすることなく、自動的に車両の現在位置を正確に設定するとともに、その正確な現在位置からの案内経路を探索できる。ステップS100では、ステップS90にて探索された案内経路に基づいて、経路案内が開始される。
【0045】
以上、説明したように本実施形態によれば、カメラ80によって撮影された車両周辺の画像に、車両が一般道路を走行していることを特定するための一般道路特定画像、または車両が高速道路を走行していることを特定するための高速道路特定画像が含まれているか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することができるようにした。このようにすることにより、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する機会を増加させることができる。この結果、車両が走行している道路を正確に認識する可能性を向上させることができる。
【図面の簡単な説明】
【0046】
【図1】本実施形態による車載ナビゲーション装置100の概略構成を示すブロック図である。
【図2】本実施形態における、現在位置変更処理のメインルーチンを示すフローチャートである。
【図3】本実施形態における、現在位置判定処理のルーチンを示すフローチャートである。
【符号の説明】
【0047】
10…位置検出器
11…GPS受信機
12…地磁気センサ
13…ステアリングセンサ
14…車速センサ
20…デジタル道路地図データベース
21…情報記録媒体
30…コンピュータ
40…表示部
50…操作スイッチ群
60…音声出力部
70…音声入力部
80…カメラ
90…第1の記憶装置
91…第2の記憶装置
【技術分野】
【0001】
本発明は、車載ナビゲーション装置に関する。
【背景技術】
【0002】
従来、CCDカメラ等によって得られる車両周辺の画像情報を用いることにより、自車の現在位置をより高精度に検出し修正することのできるマップマッチング機能を有する車載ナビゲーション装置が提案されている(例えば、特許文献1参照。)。この特許文献1に開示されている車載ナビゲーション装置によれば、例えば、当該装置が車両の周辺映像を収集し、周辺映像から交差点を特徴付ける信号機や一時停止線等が識別できた場合には、当該装置は自車の現在位置が一般道路上にあると判定することが可能であった。
【特許文献1】特開平09−152348号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述した従来の装置では、例えば、交差点を特徴付ける信号機や一時停止線等を有さない一般道路と高速道路とが近接している場合に、自車が当該一般道路を走行中にディスプレイ上に表示された自車マークが高速道路上に誤表示されることが考えられる。この場合、自車マークが表示されている高速道路に近接している一般道路には、交差点を特徴付ける信号機や一時停止線等を有さないため、ディスプレイ上に表示された自車マークが高速道路上に誤表示された状態が継続してしまう。このため、従来の装置は自車が走行している道路が高速道路であると誤認識してしまうことがあった。すなわち、従来の装置は自車が走行している道路を正確に認識することができないことがあった。
【0004】
このような問題は、車両の周辺映像から交差点を特徴付ける信号機や一時停止線等が識別できた場合に限り、自車の現在位置が一般道路上にあると判定することしかできなかったために起こりえた。換言すると、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する機会が少なかったため、このような問題が起こりえた。
【0005】
本発明は、上述した点に鑑みてなされたもので、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する機会を増加させることによって、車両が走行している道路を正確に認識する可能性を向上させることが可能な車載ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、請求項1に記載の車載ナビゲーション装置は、
車両の現在位置を検出する現在位置検出手段と、
少なくとも高速道路と一般道路とを区分けするための道路種別情報を含む道路地図データを記憶する道路地図データ記憶手段と、
車両周辺の状況を撮影する撮影手段と、
車両が一般道路を走行していることを特定するための一般道路特定画像を記憶する第1の記憶手段と、
車両が高速道路を走行していることを特定するための高速道路特定画像を記憶する第2の記憶手段と、
前記撮影された車両周辺の画像に前記一般道路特定画像または前記高速道路特定画像が含まれるか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する判定手段と、
前記判定手段の判定結果に応じて、前記車両が走行している道路を認識する走行道路認識手段とを備えることを特徴とする。
【0007】
上述したように、請求項1に記載の車載ナビゲーション装置では、撮影された車両周辺の画像に、車両が一般道路を走行していることを特定するための一般道路特定画像、または車両が高速道路を走行していることを特定するための高速道路特定画像が含まれているか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する。このようにすることにより、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する機会を増加させることができる。この結果、車両が走行している道路を正確に認識する可能性を向上させることができる。
【0008】
請求項2に記載したように、判定手段は、撮影された車両周辺の画像内におけるオブジェクトと、一般道路特定画像と高速道路特定画像とのいずれか一方とがパターンマッチングするか否かを判定するパターンマッチング判定手段を有し、パターンマッチング判定手段の判定結果に基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することが好ましい。このようにすることにより、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することができる。
【0009】
請求項3に記載したように、一般道路特定画像及び高速道路特定画像は、一般道路及び高速道路特有の特徴物を含む画像を撮影し、その撮影した画像に対して、ノイズ除去処理、二値化処理、及びエッジ検出処理の少なくともいずれか1つの処理を施すことによって生成されることが好ましい。このようにすることにより、一般道路特定画像及び高速道路特定画像が生成される。
【0010】
請求項4に記載したように、第1の記憶手段は、一般道路特定画像として、信号機、一般道路の路面に記された記号及び文字である一般道路専用標示、一般道路専用標示板、及び光ビーコンの画像を記憶することが好ましい。信号機、一般道路の路面に記された記号及び文字である一般道路専用標示、一般道路専用標示板、及び光ビーコンは、一般道路に関する特有なものであるため、これら信号機等の画像と、撮影された車両周辺の画像内におけるオブジェクトとがパターンマッチングする場合、車両の現在位置が一般道路上にあると考えることができる。
【0011】
請求項5に記載したように、第2の記憶手段は、高速道路特定画像として、ETCゲート、料金所、高速道路の路面に記された記号及び文字である高速道路専用標示、高速道路専用標示板、及び電波ビーコンの画像を記憶することが好ましい。ETCゲート、料金所、高速道路の路面に記された記号及び文字である高速道路専用標示、高速道路専用標示板、及び電波ビーコンは、高速道路に関する特有なものであるため、これらETCゲート等の画像と、撮影された車両周辺の画像内におけるオブジェクトとがパターンマッチングする場合、車両の現在位置が高速道路上にあると考えることができる。
【0012】
請求項6に記載したように、表示部と、表示部において、道路地図データに基づく道路地図と車両の現在位置とを表示する表示制御手段とを備え、表示制御手段は、判定手段の判定結果が、車両の現在位置が表示されている道路の道路種別とが異なる場合には、一般道路と高速道路とが重なっている位置に車両の現在位置が表示されている場合を除いて、判定手段が判定した道路種別の道路上に、車両の現在位置を変更して表示することが好ましい。これにより、高速道路と一般道路とが近接している場合に、車両の現在位置が誤って表示されているときに、運転者が操作をすることなく、自動的に車両の現在位置を正確に設定することができる。
【0013】
請求項7に記載したように、道路地図データを用いて車両を目的地に案内するための案内経路を探索する案内経路探索手段と、案内経路探索手段によって探索された案内経路に従って経路案内を行なう経路案内手段と、経路案内手段による経路案内中に、表示制御手段によって車両の現在位置が変更される場合に、その変更後の現在位置からの案内経路を探索するように案内経路探索手段に対して指示する指示手段とを備え、表示制御手段は、変更後の現在位置と、指示手段の指示によって探索された案内経路とを表示部に表示することもできる。これにより、経路案内中に、誤って車両の現在位置が表示されているときに、運転者が操作をすることなく、自動的に車両の現在位置を正確に設定するとともに、その正確な現在位置からの案内経路を探索できる。
【発明を実施するための最良の形態】
【0014】
以下、本発明の好ましい実施形態について図面を参照して説明する。図1は、本実施形態による車載ナビゲーション装置100の概略構成を示すブロック図である。以下、本実施形態による車載ナビゲーション装置について詳細に説明する。
【0015】
図1に示すように、車載ナビゲーション装置100は、位置検出器10、デジタル道路地図データベース20、コンピュータ30、表示部40、操作スイッチ群50、音声出力部60、音声入力部70、カメラ80、第1の記憶装置90、及び第2の記憶装置91を備えている。
【0016】
コンピュータ30は、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインを備えている。ROMには、コンピュータ30が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0017】
位置検出器10は、衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機11、車両の絶対方位を検出するための地磁気センサ12、車両の相対方位を検出するためのステアリングセンサ13を有している。さらに、位置検出器10は、車両の走行速度から走行距離を検出するために車速センサ14を備えている。
【0018】
このように、位置検出器10は、電波航法による車両位置測定のためにGPS受信機11を有するとともに、自立航法による車両位置推定のために地磁気センサ12、ステアリングセンサ13及び車速センサ14を有している。また、電波航法としては、GPSに限らず、例えばVICSの光ビーコンを利用しても良い。また、自立航法における車両の相対方位を検出するために、ステアリングセンサ13に代えて、ジャイロセンサや車両の左右輪に設けられた車輪速センサを用いても良い。
【0019】
デジタル道路地図データベース20は、道路データ、背景データ、文字データ及び施設データなどを含むデジタル地図データをコンピュータ30に入力するための装置である。デジタル道路地図データベース20は、デジタル地図データを記憶する情報記憶媒体21を有し、情報記憶媒体21としては、そのデータ量からCD−ROMまたはDVD−ROMを用いるのが一般的であるが、メモリカード、ハードディスク等を用いてもよい。
【0020】
ここで、道路データの構成について説明する。道路データは、道路毎に固有の番号を付したリンクID、リンク座標データ、ノード座標データ、高速道路や一般道路等の道路種別を示す道路種別データ、道路幅員データ等の各データから構成されている。道路データにおけるリンクとは、地図上の各道路を、交差点、分岐点などを示すノードにより複数に分割し、そして2つのノード間をリンクとして規定したものである。そして、リンク座標データには、このリンクの始端と終端の座標が記述される。なお、リンクの途中にノードが含まれる場合には、ノード座標データにノード座標が記述される。この道路データは、地図を表示する以外に、マップマッチング処理を行なう際の道路の形状を与えるために用いられたり、目的地までの案内経路を検索する際に用いられる。
【0021】
背景データは、道路地図を表示部40に表示する際に、道路以外の表示対象となる施設形状、自然地形等を表示するためのデータである。文字データは、地名、施設名、道路名等を道路地図上に表示するためのものであり、表示位置に対応する地図上の座標を関連付けたデータとして構成している。
【0022】
表示部40は、例えば、液晶ディスプレイによって構成され、表示部40の画面には車両の現在位置に対応する自車位置マーク、及び、デジタル道路地図データベース20より入力された地図データによって生成される車両周辺の道路地図を表示することができる。また、目的地が設定された場合、道路地図上には、現在位置から目的地までの案内経路が重ねて表示される。
【0023】
操作スイッチ群50は、例えば、表示部40と一体になったタッチパネルスイッチもしくは表示部40の周辺に設けられるメカニカルなスイッチ等からなり、各種入力に使用される。
【0024】
音声出力部60はスピーカ等からなり、経路案内が行なわれている場合に、案内音声を出力したり、音声認識時に、入力音声に関するガイダンスを出力したりするものである。また、音声入力部70は、マイク等からなり、ユーザによって発せられた音声を取り込んで、コンピュータ30に入力する。コンピュータ30は、入力された音声の認識処理を行い、その認識結果に基づいて、各種の制御を実行する。
【0025】
カメラ80は、例えば、助手席側のドアのドアミラー付近に設けられたCCDカメラであり、車両周辺の状況を撮影するためのものである。また、カメラ80は、車両の夜間走行時における車両周辺の状況を撮影するために赤外線照射器を有する。
【0026】
第1の記憶装置90には、一般道路特定画像が記憶されている。この一般道路特定画像は、一般道路特有の特徴物(例えば、信号機、一般道路専用標識、一般道路専用標示、及び光ビーコンなど)を含む画像を撮影し、その撮影した画像に対して、エッジ検出処理を施すことによって生成されたものである。エッジ検出処理とは、画像の明るさの変化によりオブジェクトの輪郭を算出する処理のことである。また、ノイズ除去処理、及び二値化処理の少なくともいずれか1つの処理を施すことによっても一般道路特定画像が生成される。このようにすることにより、一般道路特定画像が生成される。
【0027】
第2の記憶装置91には、高速道路特定画像が記憶されている。この高速道路特定画像は、高速道路特有の特徴物(例えば、ETCゲート、料金所、高速道路専用標識、高速道路専用標示、及び電波ビーコンなど)を含む画像を撮影し、その撮影した画像に対して、エッジ検出処理を施すことによって生成されたものである。エッジ検出処理とは、画像の明るさの変化によりオブジェクトの輪郭を算出する処理のことである。また、ノイズ除去処理、及び二値化処理の少なくともいずれか1つの処理を施すことによっても高速道路特定画像が生成される。このようにすることにより、高速道路特定画像が生成される。
【0028】
また、本実施形態の車載ナビゲーション装置100は、車両の現在位置の周囲において、高速道路と一般道路とが近接している場合に、カメラ80が車両周辺の状況を撮影し、この撮影された車両周辺の画像内におけるオブジェクトと、第1の記憶装置90に記憶されている一般道路特定画像と第2の記憶装置91に記憶されている高速道路特定画像とのいずれか一方とがパターンマッチングするか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する現在位置判定機能も備えている。
【0029】
さらに、本実施形態の車載ナビゲーション装置100は、操作スイッチ群50もしくは音声認識によって目的地の位置が入力されると、現在位置からその目的地までの最適な経路を自動的に選択して案内経路を形成し表示する、いわゆる経路案内機能も備えている。このような自動的に最適な経路を設定する手法は、周知のダイクストラ法等の手法が知られている。また、ユーザによって入力された、例えば、住所、施設名称、電話番号等から施設等の位置を検索する検索機能も備えている。
【0030】
これらの機能は、主にコンピュータ30によって各種の演算処理がなされることによって実行される。すなわち、コンピュータ30は目的地が入力されるとデジタル道路地図データベース20の地図データを用いて経路を計算し、その経路を表示する。この他、コンピュータ30は、車両の位置を示す自車位置マークとその周辺の道路地図を表示部40に表示させたり、道路地図の縮尺を変更したりする。
【0031】
次に、本実施形態における現在位置変更処理について、図2及び図3のフローチャートを用いて詳細に説明する。なお、図2は、現在位置変更処理のメインルーチンを示すフローチャートであり、図3は、現在位置判定処理のルーチンを示すフローチャートである。
【0032】
まず、図2のステップS10では、車両の現在位置を検出する。このとき、GPS受信機11による位置データは、上述の道路データの座標データ(緯度と経度)と同じ形態で取得される。また、地磁気センサ12、ステアリングセンサ13、車速センサ14によって自車両の進行方向及び走行距離に関するデータが取得され、過去に算出、もしくは確定された車両位置を基準として、現在位置の座標データの算出を行なう(自立航法による座標データの算出)。なお、現在位置は、基本的には、自立航法により算出された座標データに基づいて求められる。ただし、GPS受信機11による位置データが取得されている場合には、両者を比較し、その差が所定距離以上である場合には、現在位置として、GPS受信機11による位置データを採用する。
【0033】
ステップS20では、車両の現在位置を含む、周辺地図の地図データがデジタル道路地図データベース20から読み込まれ、表示部40に表示される。ステップS30では、マップマッチング処理が行なわれる。例えば、ステップS10にて算出した現在位置と所定距離以内の道路、もしくは既に道路上にマッチングされている場合には、そのマッチング道路に接続された道路を車両が走行する可能性のある道路として特定する。そして、ステップS10にて過去に算出された複数個の現在位置と最新の現在位置とを連結して、走行軌跡が算出される。その走行軌跡の形状と、車両が走行する可能性のある道路の形状とを比較して、最も相関の高い道路を車両が走行している道路と推定する。これにより、ステップS10において取得された現在位置を表示すべき道路が決定される。
【0034】
なお、ステップS10における現在位置の算出、及び上述した走行軌跡の算出は、GPS受信機11の位置データのみから行なっても良いし、自立航法の位置データのみから行なっても良い。
【0035】
ステップS40では、車両の現在位置の周囲において、高速道路と一般道路とが近接しているか否かを判定する。具体的には、例えば、高速道路と一般道路とが並走している場合である。近接していない場合には、処理が終了される。一方、近接している場合には、ステップS50に進む。
【0036】
ステップS50では、現在位置判定処理が実行される。この現在位置判定処理を図3のフローチャートを用いて説明する。
【0037】
図3のフローチャートにおいて、まずステップS210では、カメラ80が車両周辺の状況を撮影し、この撮影された車両周辺の画像がコンピュータ30に出力される。
【0038】
ステップS220では、ステップS210にて撮影された車両周辺の画像内におけるオブジェクトと、第1の記憶装置90に記憶されている一般道路特定画像とがパターンマッチングするか否かを判定する。具体的には、例えば、コンピュータ30は、車両周辺の画像に対して、エッジ検出処理を施す。エッジ検出処理が施された車両周辺の画像内において、当該画像内のオブジェクトが特定される。この特定されたオブジェクトと、第1の記憶装置90に記憶されている一般道路特定画像とが一致する又は相似であるか否かを判定する。一致する又は相似であると判定された場合、ステップS230に進む。ステップS230では、車両の現在位置は一般道路上にあると判定される。そして、コンピュータ30は、車両が走行している道路は一般道路であると認識する。具体的には、例えば、コンピュータ30は、車両が走行している道路の道路種別として、「一般道路」をコンピュータ30のRAMに記憶する。信号機、一般道路の路面に記された記号及び文字である一般道路専用標示、一般道路専用標示板、及び光ビーコンは、一般道路に関する特有なものであるため、これら信号機等の画像と、撮影された車両周辺の画像内におけるオブジェクトとがパターンマッチングする場合、車両の現在位置が一般道路上にあると考えることができる。
【0039】
ステップS220において、一致しない又は相似でないと判定された場合、ステップS240に進む。ステップS240では、ステップS220と同様にして、ステップS210にてエッジ検出処理が施された車両周辺の画像内において、特定された当該画像内のオブジェクトと、第2の記憶装置91に記憶されている高速道路特定画像とが一致する又は相似であるか否かを判定する。一致しない又は相似でないと判定された場合、ステップS40に戻る。一方、一致する又は相似であると判定された場合、ステップS250に進む。ステップS250では、車両の現在位置は高速道路上にあると判定される。そして、コンピュータ30は、車両が走行している道路は高速道路であると認識する。具体的には、例えば、コンピュータ30は、車両が走行している道路の道路種別として、「高速道路」をコンピュータ30のRAMに記憶する。ETCゲート、料金所、高速道路の路面に記された記号及び文字である高速道路専用標示、高速道路専用標示板、及び電波ビーコンは、高速道路に関する特有なものであるため、これらETCゲート等の画像と、撮影された車両周辺の画像内におけるオブジェクトとがパターンマッチングする場合、車両の現在位置が高速道路上にあると考えることができる。
【0040】
このように、現在位置判定処理を実行することにより、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することができる。
【0041】
図2のフローチャートに戻り、ステップS60に進む。ステップS60では、道路種別が同一であるか否かを判定する。すなわち、ステップS30おいて決定された現在位置を表示する道路の道路種別と、ステップS50にて判定された現在位置が表示されるべき道路の道路種別とが異なるか否かを判定する。道路種別が同一であると判定された場合、ステップS110に進む。ステップS110では、経路案内中か否かを判定する。経路案内中ではないと判定された場合、処理が終了される。一方、経路案内中であると判定された場合、ステップS120に進む。ステップS120では、経路案内が継続される。
【0042】
一方、ステップS60において、道路種別が異なると判定された場合、ステップS65に進む。ステップS65では、道路地図上において、車両の現在位置の周囲において、高速道路と一般道路とが重なっているか否かを判定する。重なっていないと判定された場合、ステップS70に進む。ステップS70では、ステップS50にて判定された結果に基づいて、現在位置が変更される。具体的には、例えば、表示部40において、車両の現在位置が表示さている高速道路に対して、近接している道路種別の異なる一般道路上に車両の現在位置が変更される。これにより、高速道路と一般道路とが近接している場合に、車両の現在位置が誤って表示されているときに、運転者が操作をすることなく、自動的に車両の現在位置を正確に設定することができる。
【0043】
ステップS65において、重なっていると判定された場合、ステップS80に進む。ステップS80では、経路案内中か否かを判定する。経路案内中ではないと判定された場合、処理が終了される。一方、経路案内中であると判定された場合、ステップS90に進む。
【0044】
ステップS90では、案内経路が再探索される。具体的には、例えば、ステップS70にて変更された車両の現在位置が新たな開始点とされ、周知のダイクストラ法等の手法によって、この開始点から目的地までの最適な案内経路が探索される。これにより、経路案内中に、誤って車両の現在位置が表示されているときに、運転者が操作をすることなく、自動的に車両の現在位置を正確に設定するとともに、その正確な現在位置からの案内経路を探索できる。ステップS100では、ステップS90にて探索された案内経路に基づいて、経路案内が開始される。
【0045】
以上、説明したように本実施形態によれば、カメラ80によって撮影された車両周辺の画像に、車両が一般道路を走行していることを特定するための一般道路特定画像、または車両が高速道路を走行していることを特定するための高速道路特定画像が含まれているか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することができるようにした。このようにすることにより、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する機会を増加させることができる。この結果、車両が走行している道路を正確に認識する可能性を向上させることができる。
【図面の簡単な説明】
【0046】
【図1】本実施形態による車載ナビゲーション装置100の概略構成を示すブロック図である。
【図2】本実施形態における、現在位置変更処理のメインルーチンを示すフローチャートである。
【図3】本実施形態における、現在位置判定処理のルーチンを示すフローチャートである。
【符号の説明】
【0047】
10…位置検出器
11…GPS受信機
12…地磁気センサ
13…ステアリングセンサ
14…車速センサ
20…デジタル道路地図データベース
21…情報記録媒体
30…コンピュータ
40…表示部
50…操作スイッチ群
60…音声出力部
70…音声入力部
80…カメラ
90…第1の記憶装置
91…第2の記憶装置
【特許請求の範囲】
【請求項1】
車両の現在位置を検出する現在位置検出手段と、
少なくとも高速道路と一般道路とを区分けするための道路種別情報を含む道路地図データを記憶する道路地図データ記憶手段と、
車両周辺の状況を撮影する撮影手段と、
車両が一般道路を走行していることを特定するための一般道路特定画像を記憶する第1の記憶手段と、
車両が高速道路を走行していることを特定するための高速道路特定画像を記憶する第2の記憶手段と、
前記撮影された車両周辺の画像に前記一般道路特定画像または前記高速道路特定画像が含まれるか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する判定手段と、
前記判定手段の判定結果に応じて、前記車両が走行している道路を認識する走行道路認識手段とを備えることを特徴とする車載ナビゲーション装置。
【請求項2】
前記判定手段は、
前記撮影された車両周辺の画像内におけるオブジェクトと、前記一般道路特定画像と前記高速道路特定画像とのいずれか一方とがパターンマッチングするか否かを判定するパターンマッチング判定手段を有し、
前記パターンマッチング判定手段の判定結果に基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することを特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項3】
前記一般道路特定画像及び前記高速道路特定画像は、一般道路及び高速道路特有の特徴物を含む画像を撮影し、その撮影した画像に対して、ノイズ除去処理、二値化処理、及びエッジ検出処理の少なくともいずれか1つの処理を施すことによって生成されることを特徴とする請求項1または請求項2に記載の車載ナビゲーション装置。
【請求項4】
前記第1の記憶手段は、前記一般道路特定画像として、信号機、一般道路の路面に記された記号及び文字である一般道路専用標示、一般道路専用標示板、及び光ビーコンの画像を記憶することを特徴とする請求項1乃至請求項3のいずれかに記載の車載ナビゲーション装置。
【請求項5】
前記第2の記憶手段は、前記高速道路特定画像として、ETCゲート、料金所、高速道路の路面に記された記号及び文字である高速道路専用標示、高速道路専用標示板、及び電波ビーコンの画像を記憶することを特徴とする請求項1乃至請求項4のいずれかに記載の車載ナビゲーション装置。
【請求項6】
表示部と、
前記表示部において、前記道路地図データに基づく道路地図と前記車両の現在位置とを表示する表示制御手段とを備え、
前記表示制御手段は、前記判定手段の判定結果が、車両の現在位置が表示されている道路の道路種別とが異なる場合には、一般道路と高速道路とが重なっている位置に車両の現在位置が表示されている場合を除いて、前記判定手段が判定した道路種別の道路上に、車両の現在位置を変更して表示することを特徴とする請求項1乃至請求項5のいずれかに記載の車載ナビゲーション装置。
【請求項7】
前記道路地図データを用いて車両を目的地に案内するための案内経路を探索する案内経路探索手段と、
前記案内経路探索手段によって探索された案内経路に従って経路案内を行なう経路案内手段と、
前記経路案内手段による経路案内中に、前記表示制御手段によって車両の現在位置が変更される場合に、その変更後の現在位置からの案内経路を探索するように前記案内経路探索手段に対して指示する指示手段とを備え、
前記表示制御手段は、前記変更後の現在位置と、前記指示手段の指示によって探索された案内経路とを前記表示部に表示することを特徴とする請求項6に記載の車載ナビゲーション装置。
【請求項1】
車両の現在位置を検出する現在位置検出手段と、
少なくとも高速道路と一般道路とを区分けするための道路種別情報を含む道路地図データを記憶する道路地図データ記憶手段と、
車両周辺の状況を撮影する撮影手段と、
車両が一般道路を走行していることを特定するための一般道路特定画像を記憶する第1の記憶手段と、
車両が高速道路を走行していることを特定するための高速道路特定画像を記憶する第2の記憶手段と、
前記撮影された車両周辺の画像に前記一般道路特定画像または前記高速道路特定画像が含まれるか否かに基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定する判定手段と、
前記判定手段の判定結果に応じて、前記車両が走行している道路を認識する走行道路認識手段とを備えることを特徴とする車載ナビゲーション装置。
【請求項2】
前記判定手段は、
前記撮影された車両周辺の画像内におけるオブジェクトと、前記一般道路特定画像と前記高速道路特定画像とのいずれか一方とがパターンマッチングするか否かを判定するパターンマッチング判定手段を有し、
前記パターンマッチング判定手段の判定結果に基づいて、車両の現在位置が一般道路上にあるか高速道路上にあるかを判定することを特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項3】
前記一般道路特定画像及び前記高速道路特定画像は、一般道路及び高速道路特有の特徴物を含む画像を撮影し、その撮影した画像に対して、ノイズ除去処理、二値化処理、及びエッジ検出処理の少なくともいずれか1つの処理を施すことによって生成されることを特徴とする請求項1または請求項2に記載の車載ナビゲーション装置。
【請求項4】
前記第1の記憶手段は、前記一般道路特定画像として、信号機、一般道路の路面に記された記号及び文字である一般道路専用標示、一般道路専用標示板、及び光ビーコンの画像を記憶することを特徴とする請求項1乃至請求項3のいずれかに記載の車載ナビゲーション装置。
【請求項5】
前記第2の記憶手段は、前記高速道路特定画像として、ETCゲート、料金所、高速道路の路面に記された記号及び文字である高速道路専用標示、高速道路専用標示板、及び電波ビーコンの画像を記憶することを特徴とする請求項1乃至請求項4のいずれかに記載の車載ナビゲーション装置。
【請求項6】
表示部と、
前記表示部において、前記道路地図データに基づく道路地図と前記車両の現在位置とを表示する表示制御手段とを備え、
前記表示制御手段は、前記判定手段の判定結果が、車両の現在位置が表示されている道路の道路種別とが異なる場合には、一般道路と高速道路とが重なっている位置に車両の現在位置が表示されている場合を除いて、前記判定手段が判定した道路種別の道路上に、車両の現在位置を変更して表示することを特徴とする請求項1乃至請求項5のいずれかに記載の車載ナビゲーション装置。
【請求項7】
前記道路地図データを用いて車両を目的地に案内するための案内経路を探索する案内経路探索手段と、
前記案内経路探索手段によって探索された案内経路に従って経路案内を行なう経路案内手段と、
前記経路案内手段による経路案内中に、前記表示制御手段によって車両の現在位置が変更される場合に、その変更後の現在位置からの案内経路を探索するように前記案内経路探索手段に対して指示する指示手段とを備え、
前記表示制御手段は、前記変更後の現在位置と、前記指示手段の指示によって探索された案内経路とを前記表示部に表示することを特徴とする請求項6に記載の車載ナビゲーション装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2006−317286(P2006−317286A)
【公開日】平成18年11月24日(2006.11.24)
【国際特許分類】
【出願番号】特願2005−140257(P2005−140257)
【出願日】平成17年5月12日(2005.5.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年11月24日(2006.11.24)
【国際特許分類】
【出願日】平成17年5月12日(2005.5.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]