
車載ナビゲーション装置
【課題】ユーザの所望の施設を通過するように、目的地まで経路案内を行なうことなく、ユーザが所望の施設に立ち寄るという目的を忘れることを防止することができること。
【解決手段】ユーザによって最終目的地及び立寄施設が設定された場合、コンピュータ30は、設定された立寄施設の中で、自車両の状態に基づいて、立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。コンピュータ30は、自車両の現在位置から最終目的地までの距離が第1の所定距離以下になったときに、自車両が立ち寄っていない立寄施設がある場合には、自車両が立ち寄っていない立寄施設がある旨の警告を行なう。これにより、ユーザの所望の施設を通過するように、目的地まで経路案内を行なうことなく、ユーザが所望の施設に立ち寄るという目的を忘れることを防止することができる。
【解決手段】ユーザによって最終目的地及び立寄施設が設定された場合、コンピュータ30は、設定された立寄施設の中で、自車両の状態に基づいて、立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。コンピュータ30は、自車両の現在位置から最終目的地までの距離が第1の所定距離以下になったときに、自車両が立ち寄っていない立寄施設がある場合には、自車両が立ち寄っていない立寄施設がある旨の警告を行なう。これにより、ユーザの所望の施設を通過するように、目的地まで経路案内を行なうことなく、ユーザが所望の施設に立ち寄るという目的を忘れることを防止することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載ナビゲーション装置に関する。
【背景技術】
【0002】
従来、ユーザの所望する施設を経由地として設定し、当該経由地を通過するように、目的地までの経路を探索することが可能な車載ナビゲーション装置が提案されている。この車載ナビゲーション装置によれば、例えば、目的地が設定されると、表示部に、「経由地を設定する」項目と「経由地を設定しない」項目とが表示される。そして、「経由地を設定する」項目が選択された場合、表示部に経由地設定メニューが表示される。この経由地設定メニューには、「名称で探す」、「ジャンルで探す」、「電話番号で探す」などがある。この経由地設定メニューのいずれかの項目が選択され、選択されたメニューに応じた検索条件が入力される。この入力された検索条件と一致する施設データに対応する施設が経由地として設定される。そして、設定された経由地を通過するように、現在位置を出発地とし、設定された目的地までの経路がダイクストラ法等の手法で探索される。そして、探索された経路に従って、経路案内が行なわれる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
例えば、ユーザが、勤務先の会社から自宅に帰宅する際に、書店に立ち寄ることを所望することが考えられる。この場合、ユーザは書店に立ち寄るという目的を忘れることを防止するために、ユーザは、上述した従来の装置を利用して、書店を通過するように、特定の書店を経由地、自宅を目的地として設定する。すると、書店を経由しつつ、勤務先の会社から自宅までの経路が探索され、この探索した経路に従って、経路案内が行なわれる。
【0004】
しかしながら、ユーザは、勤務先の会社から自宅までの経路を熟知している可能性が高い。このため、ユーザは、従来の装置が、勤務先の会社から自宅までの経路に従って、経路案内を行なうことを煩わしく感じるおそれがある。
【0005】
本発明は、上述した点に鑑みてなされたもので、ユーザの所望の施設を通過するように、目的地まで経路案内を行なうことなく、ユーザが所望の施設に立ち寄るという目的を忘れることを防止することが可能な車載ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、請求項1に記載の車載ナビゲーション装置は、
自車両の現在位置を検出する現在位置検出手段と、
道路地図に関する地図データ及び道路地図上の施設に関する施設データを記憶するデータ記憶手段と、
施設データに基づいて、最終目的地及び立寄施設をユーザによって設定させる設定手段と、
設定された立寄施設の中で、自車両の状態に基づいて、設定された立寄施設のいずれかに自車両が未立ち寄りであるか否かを判定する判定手段と、
現在位置から最終目的地までの距離が第1の所定距離以下になり、かつ判定手段によって立寄施設のいずれかに自車両が未立ち寄りであると判定された場合、未立ち寄りの立寄施設がある旨を警告する警告手段とを備えることを特徴とする。
【0007】
上述したように、請求項1に記載の車載ナビゲーション装置では、ユーザによって最終目的地及び立寄施設が設定された場合、設定された立寄施設の中で、自車両の状態に基づいて、立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。当該装置は、自車両の現在位置から最終目的地までの距離が第1の所定距離以下になったときに、自車両が立ち寄っていない立寄施設がある場合には、自車両が立ち寄っていない立寄施設がある旨の警告を行なう。このようにすることにより、ユーザは、最終目的地に到達する前に、立ち寄るべき施設があることを思い出すことができる。これにより、ユーザの所望の施設を通過するように、目的地まで経路案内を行なうことなく、ユーザが所望の施設に立ち寄るという目的を忘れることを防止することができる。
【0008】
請求項2に記載したように、警告手段は、一旦、未立ち寄りの立寄施設がある旨の警告をした後は、現在位置から最終目的地までの距離が、第1の所定距離より長い第2の所定距離以上にならない限り、再度、現在位置と最終目的地の距離が第1の所定距離以下となったときに、未立ち寄りの立寄施設がある旨の警告を中止することが好ましい。例えば、最終目的地周辺の道路が蛇行していることが考えられる。この場合、自車両が立ち寄っていない立寄施設がある旨の警告が複数回行なわれる可能性があるため、ユーザが煩わしく感じるおそれがある。このため、当該装置は、自車両が立ち寄っていない立寄施設の警告を行なった後は、自車両の現在位置から最終目的地までの距離が、第1の所定距離より長い第2の所定距離以上にならない限り、再度、現在位置と最終目的地の距離が第1の所定距離以下となったときに、自車両が立ち寄っていない立寄施設の警告を中止する。
【0009】
請求項3に記載したように、現在時刻を取得する現在時刻取得手段と、設定手段は、最終目的地及び立寄施設に加えて、立寄施設に立ち寄る予定時刻をユーザによって設定させ、警告手段は、設定された予定時刻と取得した現在時刻との差が第1の所定時間に達した場合、予定時刻に立ち寄るべき立寄施設がある旨を警告することもできる。これにより、ユーザが所望の立寄施設に予定時刻に立ち寄るという目的を忘れることを防止することができる。
【0010】
請求項4に記載したように、表示部を備え、警告手段は、未立ち寄りの立寄施設のリストを表示部に表示することが好ましい。これにより、ユーザは立ち寄っていない立寄施設を把握することができる。
【0011】
請求項5に記載したように、判定手段は、設定された立寄施設を記憶する立寄施設記憶手段と、立寄施設記憶手段によって記憶された立寄施設に現在位置が到達したか否かを判定する到達判定手段と、到達判定手段によって立寄施設に現在位置が到達したと判定された場合、立寄施設に現在位置が停滞している停滞時間をカウントするカウント手段と、カウントされた停滞時間が第2の所定時間に達した場合、立寄施設記憶手段に対して、現在位置が到達した立寄施設を消去させる消去手段とを有し、立寄施設記憶手段に立寄施設が記憶されているか否かに基づいて、設定された立寄施設のいずれかに自車両が未立ち寄りであるか否かを判定することが好ましい。このようにすることにより、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定することができる。
【発明を実施するための最良の形態】
【0012】
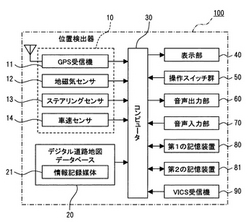
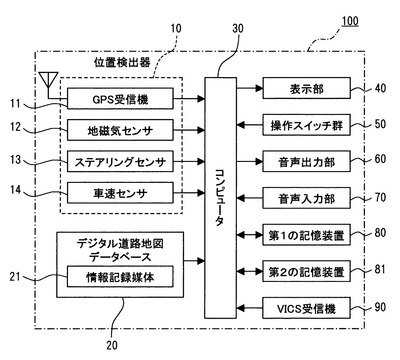
以下、本発明の好ましい実施形態について図面を参照して説明する。図1は、本実施形態による車載ナビゲーション装置100の概略構成を示すブロック図である。以下、本実施形態による車載ナビゲーション装置について詳細に説明する。
【0013】
ナビゲーション装置100は、位置検出器10、デジタル道路地図データベース20、コンピュータ30、表示部40、操作スイッチ群50、音声出力部60、音声入力部70、第1の記憶装置80、第2の記憶装置81、及びVICS受信機90を備えている。
【0014】
コンピュータ30は、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインを備えている。ROMには、コンピュータ30が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0015】
また、RAMには、後述する最終目的地に自車両が近接した否かを示す最終目的地近接フラグが記憶されている。この最終目的地近接フラグは、自車両の現在位置から最終目的地までの直線距離が500m以下になった場合には、「1」にセットされ、自車両の現在位置から最終目的地までの直線距離が500m以下になってから、自車両の現在位置から最終目的地までの直線距離が700m以上になった場合には、「0」にリセットされる。
【0016】
位置検出器10は、衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機11、車両の絶対方位を検出するための地磁気センサ12、車両の相対方位を検出するためのステアリングセンサ13を有している。さらに、位置検出器10は、車両の走行速度から走行距離を検出するために車速センサ14を備えている。
【0017】
このように、位置検出器10は、電波航法による車両位置測定のためにGPS受信機11を有するとともに、自立航法による車両位置推定のために地磁気センサ12、ステアリングセンサ13及び車速センサ14を有している。また、電波航法としては、GPSに限らず、例えばVICSの光ビーコンを利用しても良い。また、自立航法における車両の相対方位を検出するために、ステアリングセンサ13に代えて、ジャイロセンサや車両の左右輪に設けられた車輪速センサを用いても良い。
【0018】
デジタル道路地図データベース20は、道路データ、背景データ、文字データ及び施設データなどを含むデジタル地図データをコンピュータ30に入力するための装置である。デジタル道路地図データベース20は、デジタル地図データを記憶する情報記憶媒体21を有し、情報記憶媒体21としては、そのデータ量からCD−ROMまたはDVD−ROMを用いるのが一般的であるが、メモリカード、ハードディスク等を用いてもよい。
【0019】
ここで、道路データの構成について説明する。道路データは、道路毎に固有の番号を付したリンクID、リンク座標データ、ノード座標データ、高速道路や国道等の道路種別を示す道路種別データ、道路幅員データ等の各データから構成されている。道路データにおけるリンクとは、地図上の各道路を、交差点、分岐点などを示すノードにより複数に分割し、そして2つのノード間をリンクとして規定したものである。そして、リンク座標データには、このリンクの始端と終端の座標が記述される。なお、リンクの途中にノードが含まれる場合には、ノード座標データにノード座標が記述される。この道路データは、地図を表示する以外に、マップマッチング処理を行なう際の道路の形状を与えるために用いられる。
【0020】
背景データは、道路地図を表示部40に表示する際に、道路以外の表示対象となる施設形状、自然地形等を表示するためのデータである。文字データは、地名、施設名、道路名等を道路地図上に表示するためのものであり、表示位置に対応する地図上の座標を関連付けたデータとして構成している。
【0021】
施設データは、施設の検索に用いられるものであり、施設種類、施設名称、緯度・経度の座標等の各データから構成されている
表示部40は、例えば、液晶ディスプレイによって構成され、表示部40の画面には車両の現在位置に対応する自車位置マーク、及び、デジタル道路地図データベース20より入力された地図データによって生成される車両周辺の道路地図を表示することができる。
【0022】
操作スイッチ群50は、例えば、表示部40と一体になったタッチパネルスイッチもしくは表示部40の周辺に設けられるメカニカルなスイッチ等からなり、各種入力に使用される。
【0023】
音声出力部60はスピーカ等からなり、経路案内が行なわれている場合に、案内音声を出力したり、音声認識時に、入力音声に関するガイダンスを出力したりするものである。また、音声入力部70は、マイク等からなり、ユーザによって発せられた音声を取り込んで、コンピュータ30に入力する。コンピュータ30は、入力された音声の認識処理を行い、その認識結果に基づいて、各種の制御を実行する。
【0024】
第1の記憶装置80には、最終目的地が設定された場合、それが施設である場合には、その施設データにおける緯度・経度の座標データ(x0、y0)が記憶される。また、第1の記憶装置80には、ユーザの自宅の位置に対応する緯度・経度の座標データ(x´、y´)が予め記憶されている。
【0025】
第2の記憶装置81には、立寄施設が設定された場合、設定された立寄施設に対応する施設データにおける施設名称が記憶される。
【0026】
VICS受信機90は、道路に敷設されたビーコンや各地のFM放送局を介して、VICSセンタから配信される道路交通情報等の情報を受信したり、必要に応じて車両側から外部へ情報を送信したりする装置である。受信した情報は、コンピュータ30で処理され、例えば、渋滞情報や制限速度情報等は表示部40に表示される道路地図上に重ねて表示される。
【0027】
また、本実施形態の車載ナビゲーション装置100は、最終目的地及び立寄施設が設定された場合、コンピュータ30のRAMに記憶されている最終目的地近接フラグが「0」にリセットされており、かつ自車両の現在位置から最終目的地の施設位置までの直線距離が500m以下になったときに、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。そして、当該装置は、当該立寄施設のいずれかに自車両が立ち寄っていないと判定した場合、自車両が立ち寄っていない立寄施設のリストを表示部40に警告表示する警告表示機能を備えている。また、ユーザによって入力された、例えば、住所、施設名称、電話番号等から施設等の位置を検索する検索機能も備えている。
【0028】
これらの機能は、主にコンピュータ30によって各種の演算処理がなされることによって実行される。すなわち、コンピュータ30は最終目的地及び立寄施設が入力されるとデジタル道路地図データベース20の地図データを用いて最終目的地及び立寄施設を検索する。この他、コンピュータ30は、車両の位置を示す自車位置マークとその周辺の道路地図を表示部40に表示させたり、道路地図の縮尺を変更したりする。
【0029】
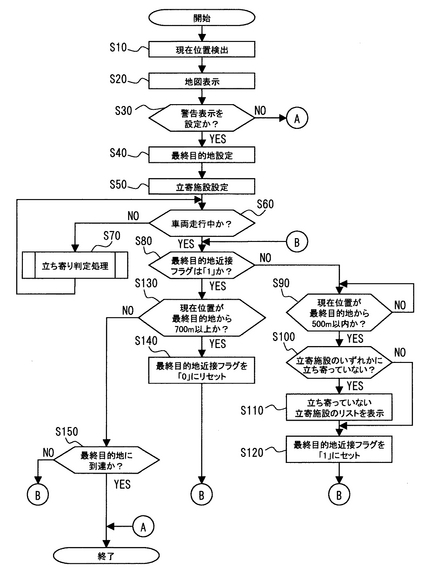
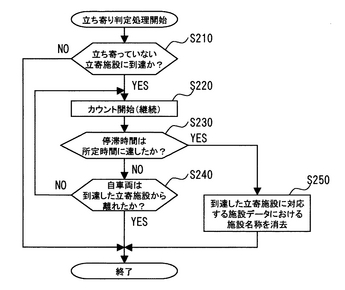
次に、本実施形態における警告表示制御処理について、図2及び図3のフローチャートを用いて詳細に説明する。なお、図2は、警告表示制御処理のメインルーチンを示すフローチャートであり、図3は、立ち寄り判定処理のルーチンを示すフローチャートである。
【0030】
まず、図2のステップS10では、車両の現在位置を検出する。このとき、GPS受信機11による位置データは、上述の道路データの座標データ(緯度と経度)と同じ形態で取得される。また、地磁気センサ12、ステアリングセンサ13、車速センサ14によって自車両の進行方向及び走行距離に関するデータが取得され、過去に算出、もしくは確定された車両位置を基準として、現在位置の座標データの算出を行なう(自立航法による座標データの算出)。なお、現在位置は、基本的には、自立航法により算出された座標データに基づいて求められる。ただし、GPS受信機11による位置データが取得されている場合には、両者を比較し、その差が所定距離以上である場合には、現在位置として、GPS受信機11による位置データを採用する。
【0031】
ステップS20では、車両の現在位置を含む、周辺地図の地図データがデジタル道路地図データベース20から読み込まれ、表示部40に表示される。ステップS30では、警告表示が設定されるか否かを判定する。具体的には、例えば、メニュー画面が表示部40に表示され、このメニュー画面の「警告表示設定メニュー」項目が選択されたか否かを判定する。「警告表示設定メニュー」項目が選択されなかったと判定された場合、処理が終了される。一方、「警告表示設定メニュー」項目が選択されたと判定された場合、ステップS40に進む。
【0032】
ステップS40では、最終目的地が設定される。具体的には、例えば、表示部40に最終目的地設定メニューが表示される。この最終目的地設定メニューには、「名称で探す」、「住所で探す」、「電話番号で探す」などがある。ユーザは、この最終目的地設定メニューのいずれかを選択し、選択したメニューに応じた検索条件を入力する。例として、ユーザが「電話番号で探す」を選択した場合、ユーザの所望する施設の電話番号「000−123−4567」が検索条件として入力され、コンピュータ30は、この入力された電話番号「000−123−4567」と一致する電話番号を付している施設データを検索する。この検索された施設データに対応する施設が最終目的地として設定される。この設定された最終目的地に対応する施設データにおける緯度・経度の座標データ(x0、y0)が、第1の記憶装置80に記憶される。
【0033】
ステップS50では、立寄施設が設定される。具体的には、例えば、表示部40に立寄施設設定メニューが表示される。この立寄施設設定メニューには、目的地設定メニューと同様に、「名称で探す」、「住所で探す」、「電話番号で探す」などがある。ステップS40と同様に、立寄施設設定メニューのいずれかの項目が選択され、選択されたメニューに応じた検索条件が入力される。この検索条件と一致する施設データに対応する施設が立寄施設として設定される。この設定された立寄施設に対応する施設データにおける施設名称が、第2の記憶装置81に記憶される。
【0034】
ステップS60では、車両が走行中であるか否かを判定する。具体的には、例えば、車速センサ14からの信号に基づいて検出された車速が0km/hでないか否かを判定する。車速が0km/hであると判定された場合、ステップS70に進む。ステップS70では、立ち寄り判定処理が実行される。この立ち寄り判定処理を図3のフローチャートを用いて説明する。
【0035】
図3のフローチャートにおいて、まず、ステップS210では、ステップS50にて設定された立寄施設の中で、自車両が立ち寄っていない立寄施設に対応する施設に自車両が到達したか否かを判定する。具体的には、例えば、コンピュータ30は、第2の記憶装置81に記憶されている施設名称に対応する施設データを、デジタル道路地図データベース20から抽出する。そして、コンピュータ30は、抽出した施設データにおける緯度・経度の座標データ(xi、yi)(i=1…n、n:抽出した施設データの数)のいずれかと、位置検出器10によって検出された現在位置の座標データ(x、y)との差分値の絶対値が所定値(a、b)以下であるか否かを判定する。差分値の絶対値が所定値(a、b)以下でないと判定された場合、立ち寄り判定処理を終了する。一方、差分値の絶対値が所定値(a、b)以下であると判定された場合、ステップS220に進む。
【0036】
ステップS220では、コンピュータ30は、自車両が立寄施設に到達してからの停滞時間のカウントを開始または継続する。ステップS230では、停滞時間が所定時間(例えば、5分)に達したか否かを判定する。停滞時間が所定時間に達してないと判定された場合、ステップS240に進む。
【0037】
ステップS240では、到達した立寄施設から自車両が離れたか否かを判定する。具体的には、例えば、ステップS210にて判定に用いられた緯度・経度の座標データ(xi、yi)と、位置検出器10によって検出された現在位置の座標データ(x、y)との差分値の絶対値が所定値(a、b)より大きいか否かを判定する。差分値の絶対値が所定値(a、b)より大きくないと判定された場合、ステップS220に戻る。一方、差分値の絶対値が所定値(a、b)より大きいと判定された場合、立ち寄り判定処理を終了する。
【0038】
ステップS230において、停滞時間が所定時間に達したと判定された場合、ステップS250に進む。ステップS250では、コンピュータ30は、第2の記憶装置81から、到達した立寄施設に対応する施設データにおける施設名称を消去する。
【0039】
図2のフローチャートに戻り、ステップS60において、車速が0km/hでないと判定された場合、ステップS80に進む。ステップS80では、コンピュータ30のRAMに記憶されている最終目的地近接フラグが「1」にセットされているか否かを判定する。最終目的地近接フラグが「1」にセットされていないと判定された場合、ステップS90に進む。
【0040】
ステップS90では、ステップS10にて検出された現在位置から最終目的地までの直線距離が500m以下になったか否かを判定する。直線距離が500m以下になっていないと判定された場合、そのまま待機状態となる。一方、直線距離が500m以下になったと判定された場合、ステップS100に進む。
【0041】
ステップS100では、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。具体的には、コンピュータ30は、第2の記憶装置81に、設定された立寄施設のいずれかが記憶されているか否かを判定する。このようにすることにより、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定することができる。
【0042】
ステップS100において、設定された立寄施設のいずれかが記憶されていると判定された場合、ステップS110に進む。ステップS110では、例えば、図4に示すような第1のリスト警告画面310が表示部40に表示される。図4の例では、第1のリスト警告画面310には、「下記の立寄施設に立ち寄っていません!!」というメッセージが表示され、当該メッセージの下側には、立ち寄っていない立寄施設のリストとして、「ブックストアB」、「酒屋Z」が表示されている。これにより、ユーザは立ち寄っていない立寄施設を把握することができる。
【0043】
なお、第1のリスト警告画面310は、表示部40に表示されてからの経過時間が所定時間(例えば、1分)に達した場合、表示部40から消える。また、第1のリスト警告画面310の右下側にある「OK」項目が選択されることによっても、第1のリスト警告画面310が表示部40から消える。
【0044】
ステップS100において、設定された立寄施設のいずれも記憶されていないと判定された場合、ステップS120に進む。ステップS120では、コンピュータ30は、RAMに記憶されている最終目的地近接フラグを「1」にセットする。例えば、最終目的地周辺の道路が蛇行していることが考えられる。この場合、自車両が立ち寄っていない立寄施設のリストの表示が複数回行なわれる可能性があるため、ユーザが煩わしく感じるおそれがある。このため、コンピュータ30は、自車両が立ち寄っていない立寄施設のリストの表示を行なった後は、自車両の現在位置から最終目的地までの距離が、700m以上にならない限り、再度、現在位置と最終目的地の距離が500m以下となったときに、自車両が立ち寄っていない立寄施設のリストの表示を中止する。
【0045】
ステップS80において、最終目的地近接フラグが「1」にセットされていると判定された場合、ステップS130に進む。ステップS130では、ステップS10にて検出された現在位置から最終目的地までの直線距離が700m以上になったか否かを判定する。直線距離が700m以上になったと判定された場合、ステップS140に進む。
【0046】
ステップS140では、コンピュータ30は、RAMに記憶されている最終目的地近接フラグを「0」にリセットする。
【0047】
ステップS130において、直線距離が700m以上になっていないと判定された場合、ステップS150に進む。ステップS150では、設定された最終目的地に対応する施設に自車両が到達したか否かを判定する。具体的には、例えば、第1の記憶装置80に記憶されている最終目的地に対応する施設データにおける緯度・経度の座標データ(x0、y0)と、位置検出器10によって検出された現在位置の座標データ(x、y)との差分値の絶対値が所定値(a、b)以下であるか否かを判定する。差分値の絶対値が所定値(a、b)以下でないと判定された場合、ステップS80に戻る。一方、差分値の絶対値が所定値(a、b)以下であると判定された場合、コンピュータ30は、第1の記憶装置80に記憶されている緯度・経度の座標データ(x0、y0)を消去する。また、第2の記憶装置81に、設定された立寄施設に対応する施設データにおける施設名称が記憶されている場合には、コンピュータ30は、当該施設データにおける施設名称を消去する。そして、コンピュータ30は、処理を終了する。
【0048】
なお、ステップS40にて最終目的地としてユーザの自宅が設定された(第1の記憶装置80にユーザの自宅の位置に対応する緯度・経度の座標データ(x´、y´)のみが記憶されている)場合、ステップS150において、第1の記憶装置80に記憶されているユーザの自宅の位置に対応する緯度・経度の座標データ(x´、y´)と、位置検出器10によって検出された現在位置の座標データ(x、y)との差分値の絶対値が所定値(a、b)以下であるか否かを判定すれば良い。なお、差分値の絶対値が所定値(a、b)以下であると判定された場合であっても、コンピュータ30は、第1の記憶装置80に記憶されているユーザの自宅の位置に対応する緯度・経度の座標データ(x´、y´)を消去しないものとする。
【0049】
以上、説明したように本実施形態によれば、ユーザによって最終目的地及び立寄施設が設定された場合、設定された立寄施設の中で、自車両の状態に基づいて、立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。コンピュータ30は、自車両の現在位置から最終目的地までの距離が500m以下になったときに、自車両が立ち寄っていない立寄施設がある場合には、自車両が立ち寄っていない立寄施設がある旨の警告を行なうことができるようにした。このようにすることにより、ユーザは、最終目的地に到達する前に、立ち寄るべき施設があることを思い出すことができる。これにより、ユーザの所望の施設を通過するように、目的地まで経路案内を行なうことなく、ユーザが所望の施設に立ち寄るという目的を忘れることを防止することができる。
【0050】
なお、本発明は、上述した実施形態になんら制限されることなく、本発明の主旨を逸脱しない範囲において、種々変形して実施することができる。
【0051】
例えば、上述した実施形態において、ユーザによって最終目的地及び立寄施設を設定させる例について説明した。しかしながら、最終目的地及び立寄施設に加えて、立寄施設に立ち寄る予定時刻を設定させても良い。
【0052】
具体的には、例えば、立寄施設に立ち寄る予定時刻が設定された場合、設定された予定時刻と、設定された立寄施設に対応する施設データにおける施設名称とが一対一に対応するように第2の記憶装置81に記憶される。コンピュータ30は、第2の記憶装置81に記憶されている予定時刻と現在時刻との差が所定時間(例えば、1時間)に達するか否かを判定する。所定時間に達したと判定された場合、例えば、図5に示すような第2のリスト警告画面320が表示部40に表示される。図5の例では、第2のリスト警告画面320には、「下記の立寄施設に下記の時刻に立ち寄ってください!!」というメッセージが表示され、当該メッセージの下側には、「スーパーCに、17:00に立ち寄ってください!!」が表示されている。これにより、ユーザが所望の立寄施設に予定時刻に立ち寄るという目的を忘れることを防止することができる。
【0053】
また、上述した実施形態において、コンピュータ30のRAMに記憶されている最終目的地近接フラグが「0」にリセットされており、かつ自車両の現在位置から最終目的地の施設位置までの直線距離が500m以下になった場合、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する例について説明した。しかしながら、エンジンの動作状態に基づいて、車両のエンジンがオフからオンされた場合、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定しても良い。
【0054】
具体的には、例えば、コンピュータ30には、エンジンをオン、オフするための信号を出力するイグニッションSW(図示せず)が接続され、このイグニッションSWからコンピュータ30に出力される信号が、オフ信号からオン信号に変更されたか否かを判定する。オフ信号からオン信号に変更されたと判定された場合、コンピュータ30は、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。そして、設定された立ち寄り地のいずれかに自車両が立ち寄っていないと判定された場合、例えば、上述した、図4に示すような第1のリスト警告画面310が表示部40に表示される。
【0055】
さらに、上述した実施形態において、施設毎に、立寄施設を設定する例について説明した。しかしながら、立寄施設として、特定の施設ではなく、立ち寄るべき施設の種類を設定しても良い。
【0056】
具体的には、例えば、立寄施設として、施設種類が設定された場合には、コンピュータ30は、設定された施設種類を第2の記憶装置81に記憶させる。そして、自車両の車速が0km/hであると判定された場合、コンピュータ30は、位置検出器10によって検出された現在位置の座標データ(x、y)を中心とする半径c(m)の円内において、第2の記憶装置81に記憶されている施設種類に該当する施設データを、デジタル道路地図データベース20から抽出する。そして、第2の記憶装置81に記憶されている施設種類に該当する施設データが抽出された場合、コンピュータ30は、当該施設データに対応する立寄施設における停滞時間をカウントする。このカウントされた停滞時間が所定時間に達したと判定された場合には、コンピュータ30は、第2の記憶装置81から、当該立寄施設に対応する施設種類を消去する。
【0057】
そして、コンピュータ30は、RAMに記憶されている最終目的地近接フラグが「0」にリセットされており、かつ自車両の現在位置から最終目的地の施設位置までの直線距離が500m以下になった場合に、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。立寄施設のいずれかに自車両が立ち寄っていないと判定された場合、第2の記憶装置81に記憶されている施設種類のリストが表示部40に表示される。
【図面の簡単な説明】
【0058】
【図1】本実施形態による車載ナビゲーション装置100の概略構成を示すブロック図である。
【図2】本実施形態における、警告表示制御処理のメインルーチンを示すフローチャートである。
【図3】本実施形態における、立ち寄り判定処理のルーチンを示すフローチャートである。
【図4】本実施形態における、第1のリスト警告画面310の表示例を示すイメージ図である。
【図5】本実施形態における、第2のリスト警告画面320の表示例を示すイメージ図である。
【符号の説明】
【0059】
10…位置検出器
11…GPS受信機
12…地磁気センサ
13…ステアリングセンサ
14…車速センサ
20…デジタル道路地図データベース
21…情報記録媒体
30…コンピュータ
40…表示部
50…操作スイッチ群
60…音声出力部
70…音声入力部
80…第1の記憶装置
81…第2の記憶装置
90…VICS受信機
【技術分野】
【0001】
本発明は、車載ナビゲーション装置に関する。
【背景技術】
【0002】
従来、ユーザの所望する施設を経由地として設定し、当該経由地を通過するように、目的地までの経路を探索することが可能な車載ナビゲーション装置が提案されている。この車載ナビゲーション装置によれば、例えば、目的地が設定されると、表示部に、「経由地を設定する」項目と「経由地を設定しない」項目とが表示される。そして、「経由地を設定する」項目が選択された場合、表示部に経由地設定メニューが表示される。この経由地設定メニューには、「名称で探す」、「ジャンルで探す」、「電話番号で探す」などがある。この経由地設定メニューのいずれかの項目が選択され、選択されたメニューに応じた検索条件が入力される。この入力された検索条件と一致する施設データに対応する施設が経由地として設定される。そして、設定された経由地を通過するように、現在位置を出発地とし、設定された目的地までの経路がダイクストラ法等の手法で探索される。そして、探索された経路に従って、経路案内が行なわれる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
例えば、ユーザが、勤務先の会社から自宅に帰宅する際に、書店に立ち寄ることを所望することが考えられる。この場合、ユーザは書店に立ち寄るという目的を忘れることを防止するために、ユーザは、上述した従来の装置を利用して、書店を通過するように、特定の書店を経由地、自宅を目的地として設定する。すると、書店を経由しつつ、勤務先の会社から自宅までの経路が探索され、この探索した経路に従って、経路案内が行なわれる。
【0004】
しかしながら、ユーザは、勤務先の会社から自宅までの経路を熟知している可能性が高い。このため、ユーザは、従来の装置が、勤務先の会社から自宅までの経路に従って、経路案内を行なうことを煩わしく感じるおそれがある。
【0005】
本発明は、上述した点に鑑みてなされたもので、ユーザの所望の施設を通過するように、目的地まで経路案内を行なうことなく、ユーザが所望の施設に立ち寄るという目的を忘れることを防止することが可能な車載ナビゲーション装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、請求項1に記載の車載ナビゲーション装置は、
自車両の現在位置を検出する現在位置検出手段と、
道路地図に関する地図データ及び道路地図上の施設に関する施設データを記憶するデータ記憶手段と、
施設データに基づいて、最終目的地及び立寄施設をユーザによって設定させる設定手段と、
設定された立寄施設の中で、自車両の状態に基づいて、設定された立寄施設のいずれかに自車両が未立ち寄りであるか否かを判定する判定手段と、
現在位置から最終目的地までの距離が第1の所定距離以下になり、かつ判定手段によって立寄施設のいずれかに自車両が未立ち寄りであると判定された場合、未立ち寄りの立寄施設がある旨を警告する警告手段とを備えることを特徴とする。
【0007】
上述したように、請求項1に記載の車載ナビゲーション装置では、ユーザによって最終目的地及び立寄施設が設定された場合、設定された立寄施設の中で、自車両の状態に基づいて、立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。当該装置は、自車両の現在位置から最終目的地までの距離が第1の所定距離以下になったときに、自車両が立ち寄っていない立寄施設がある場合には、自車両が立ち寄っていない立寄施設がある旨の警告を行なう。このようにすることにより、ユーザは、最終目的地に到達する前に、立ち寄るべき施設があることを思い出すことができる。これにより、ユーザの所望の施設を通過するように、目的地まで経路案内を行なうことなく、ユーザが所望の施設に立ち寄るという目的を忘れることを防止することができる。
【0008】
請求項2に記載したように、警告手段は、一旦、未立ち寄りの立寄施設がある旨の警告をした後は、現在位置から最終目的地までの距離が、第1の所定距離より長い第2の所定距離以上にならない限り、再度、現在位置と最終目的地の距離が第1の所定距離以下となったときに、未立ち寄りの立寄施設がある旨の警告を中止することが好ましい。例えば、最終目的地周辺の道路が蛇行していることが考えられる。この場合、自車両が立ち寄っていない立寄施設がある旨の警告が複数回行なわれる可能性があるため、ユーザが煩わしく感じるおそれがある。このため、当該装置は、自車両が立ち寄っていない立寄施設の警告を行なった後は、自車両の現在位置から最終目的地までの距離が、第1の所定距離より長い第2の所定距離以上にならない限り、再度、現在位置と最終目的地の距離が第1の所定距離以下となったときに、自車両が立ち寄っていない立寄施設の警告を中止する。
【0009】
請求項3に記載したように、現在時刻を取得する現在時刻取得手段と、設定手段は、最終目的地及び立寄施設に加えて、立寄施設に立ち寄る予定時刻をユーザによって設定させ、警告手段は、設定された予定時刻と取得した現在時刻との差が第1の所定時間に達した場合、予定時刻に立ち寄るべき立寄施設がある旨を警告することもできる。これにより、ユーザが所望の立寄施設に予定時刻に立ち寄るという目的を忘れることを防止することができる。
【0010】
請求項4に記載したように、表示部を備え、警告手段は、未立ち寄りの立寄施設のリストを表示部に表示することが好ましい。これにより、ユーザは立ち寄っていない立寄施設を把握することができる。
【0011】
請求項5に記載したように、判定手段は、設定された立寄施設を記憶する立寄施設記憶手段と、立寄施設記憶手段によって記憶された立寄施設に現在位置が到達したか否かを判定する到達判定手段と、到達判定手段によって立寄施設に現在位置が到達したと判定された場合、立寄施設に現在位置が停滞している停滞時間をカウントするカウント手段と、カウントされた停滞時間が第2の所定時間に達した場合、立寄施設記憶手段に対して、現在位置が到達した立寄施設を消去させる消去手段とを有し、立寄施設記憶手段に立寄施設が記憶されているか否かに基づいて、設定された立寄施設のいずれかに自車両が未立ち寄りであるか否かを判定することが好ましい。このようにすることにより、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の好ましい実施形態について図面を参照して説明する。図1は、本実施形態による車載ナビゲーション装置100の概略構成を示すブロック図である。以下、本実施形態による車載ナビゲーション装置について詳細に説明する。
【0013】
ナビゲーション装置100は、位置検出器10、デジタル道路地図データベース20、コンピュータ30、表示部40、操作スイッチ群50、音声出力部60、音声入力部70、第1の記憶装置80、第2の記憶装置81、及びVICS受信機90を備えている。
【0014】
コンピュータ30は、内部には周知のCPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインを備えている。ROMには、コンピュータ30が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0015】
また、RAMには、後述する最終目的地に自車両が近接した否かを示す最終目的地近接フラグが記憶されている。この最終目的地近接フラグは、自車両の現在位置から最終目的地までの直線距離が500m以下になった場合には、「1」にセットされ、自車両の現在位置から最終目的地までの直線距離が500m以下になってから、自車両の現在位置から最終目的地までの直線距離が700m以上になった場合には、「0」にリセットされる。
【0016】
位置検出器10は、衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機11、車両の絶対方位を検出するための地磁気センサ12、車両の相対方位を検出するためのステアリングセンサ13を有している。さらに、位置検出器10は、車両の走行速度から走行距離を検出するために車速センサ14を備えている。
【0017】
このように、位置検出器10は、電波航法による車両位置測定のためにGPS受信機11を有するとともに、自立航法による車両位置推定のために地磁気センサ12、ステアリングセンサ13及び車速センサ14を有している。また、電波航法としては、GPSに限らず、例えばVICSの光ビーコンを利用しても良い。また、自立航法における車両の相対方位を検出するために、ステアリングセンサ13に代えて、ジャイロセンサや車両の左右輪に設けられた車輪速センサを用いても良い。
【0018】
デジタル道路地図データベース20は、道路データ、背景データ、文字データ及び施設データなどを含むデジタル地図データをコンピュータ30に入力するための装置である。デジタル道路地図データベース20は、デジタル地図データを記憶する情報記憶媒体21を有し、情報記憶媒体21としては、そのデータ量からCD−ROMまたはDVD−ROMを用いるのが一般的であるが、メモリカード、ハードディスク等を用いてもよい。
【0019】
ここで、道路データの構成について説明する。道路データは、道路毎に固有の番号を付したリンクID、リンク座標データ、ノード座標データ、高速道路や国道等の道路種別を示す道路種別データ、道路幅員データ等の各データから構成されている。道路データにおけるリンクとは、地図上の各道路を、交差点、分岐点などを示すノードにより複数に分割し、そして2つのノード間をリンクとして規定したものである。そして、リンク座標データには、このリンクの始端と終端の座標が記述される。なお、リンクの途中にノードが含まれる場合には、ノード座標データにノード座標が記述される。この道路データは、地図を表示する以外に、マップマッチング処理を行なう際の道路の形状を与えるために用いられる。
【0020】
背景データは、道路地図を表示部40に表示する際に、道路以外の表示対象となる施設形状、自然地形等を表示するためのデータである。文字データは、地名、施設名、道路名等を道路地図上に表示するためのものであり、表示位置に対応する地図上の座標を関連付けたデータとして構成している。
【0021】
施設データは、施設の検索に用いられるものであり、施設種類、施設名称、緯度・経度の座標等の各データから構成されている
表示部40は、例えば、液晶ディスプレイによって構成され、表示部40の画面には車両の現在位置に対応する自車位置マーク、及び、デジタル道路地図データベース20より入力された地図データによって生成される車両周辺の道路地図を表示することができる。
【0022】
操作スイッチ群50は、例えば、表示部40と一体になったタッチパネルスイッチもしくは表示部40の周辺に設けられるメカニカルなスイッチ等からなり、各種入力に使用される。
【0023】
音声出力部60はスピーカ等からなり、経路案内が行なわれている場合に、案内音声を出力したり、音声認識時に、入力音声に関するガイダンスを出力したりするものである。また、音声入力部70は、マイク等からなり、ユーザによって発せられた音声を取り込んで、コンピュータ30に入力する。コンピュータ30は、入力された音声の認識処理を行い、その認識結果に基づいて、各種の制御を実行する。
【0024】
第1の記憶装置80には、最終目的地が設定された場合、それが施設である場合には、その施設データにおける緯度・経度の座標データ(x0、y0)が記憶される。また、第1の記憶装置80には、ユーザの自宅の位置に対応する緯度・経度の座標データ(x´、y´)が予め記憶されている。
【0025】
第2の記憶装置81には、立寄施設が設定された場合、設定された立寄施設に対応する施設データにおける施設名称が記憶される。
【0026】
VICS受信機90は、道路に敷設されたビーコンや各地のFM放送局を介して、VICSセンタから配信される道路交通情報等の情報を受信したり、必要に応じて車両側から外部へ情報を送信したりする装置である。受信した情報は、コンピュータ30で処理され、例えば、渋滞情報や制限速度情報等は表示部40に表示される道路地図上に重ねて表示される。
【0027】
また、本実施形態の車載ナビゲーション装置100は、最終目的地及び立寄施設が設定された場合、コンピュータ30のRAMに記憶されている最終目的地近接フラグが「0」にリセットされており、かつ自車両の現在位置から最終目的地の施設位置までの直線距離が500m以下になったときに、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。そして、当該装置は、当該立寄施設のいずれかに自車両が立ち寄っていないと判定した場合、自車両が立ち寄っていない立寄施設のリストを表示部40に警告表示する警告表示機能を備えている。また、ユーザによって入力された、例えば、住所、施設名称、電話番号等から施設等の位置を検索する検索機能も備えている。
【0028】
これらの機能は、主にコンピュータ30によって各種の演算処理がなされることによって実行される。すなわち、コンピュータ30は最終目的地及び立寄施設が入力されるとデジタル道路地図データベース20の地図データを用いて最終目的地及び立寄施設を検索する。この他、コンピュータ30は、車両の位置を示す自車位置マークとその周辺の道路地図を表示部40に表示させたり、道路地図の縮尺を変更したりする。
【0029】
次に、本実施形態における警告表示制御処理について、図2及び図3のフローチャートを用いて詳細に説明する。なお、図2は、警告表示制御処理のメインルーチンを示すフローチャートであり、図3は、立ち寄り判定処理のルーチンを示すフローチャートである。
【0030】
まず、図2のステップS10では、車両の現在位置を検出する。このとき、GPS受信機11による位置データは、上述の道路データの座標データ(緯度と経度)と同じ形態で取得される。また、地磁気センサ12、ステアリングセンサ13、車速センサ14によって自車両の進行方向及び走行距離に関するデータが取得され、過去に算出、もしくは確定された車両位置を基準として、現在位置の座標データの算出を行なう(自立航法による座標データの算出)。なお、現在位置は、基本的には、自立航法により算出された座標データに基づいて求められる。ただし、GPS受信機11による位置データが取得されている場合には、両者を比較し、その差が所定距離以上である場合には、現在位置として、GPS受信機11による位置データを採用する。
【0031】
ステップS20では、車両の現在位置を含む、周辺地図の地図データがデジタル道路地図データベース20から読み込まれ、表示部40に表示される。ステップS30では、警告表示が設定されるか否かを判定する。具体的には、例えば、メニュー画面が表示部40に表示され、このメニュー画面の「警告表示設定メニュー」項目が選択されたか否かを判定する。「警告表示設定メニュー」項目が選択されなかったと判定された場合、処理が終了される。一方、「警告表示設定メニュー」項目が選択されたと判定された場合、ステップS40に進む。
【0032】
ステップS40では、最終目的地が設定される。具体的には、例えば、表示部40に最終目的地設定メニューが表示される。この最終目的地設定メニューには、「名称で探す」、「住所で探す」、「電話番号で探す」などがある。ユーザは、この最終目的地設定メニューのいずれかを選択し、選択したメニューに応じた検索条件を入力する。例として、ユーザが「電話番号で探す」を選択した場合、ユーザの所望する施設の電話番号「000−123−4567」が検索条件として入力され、コンピュータ30は、この入力された電話番号「000−123−4567」と一致する電話番号を付している施設データを検索する。この検索された施設データに対応する施設が最終目的地として設定される。この設定された最終目的地に対応する施設データにおける緯度・経度の座標データ(x0、y0)が、第1の記憶装置80に記憶される。
【0033】
ステップS50では、立寄施設が設定される。具体的には、例えば、表示部40に立寄施設設定メニューが表示される。この立寄施設設定メニューには、目的地設定メニューと同様に、「名称で探す」、「住所で探す」、「電話番号で探す」などがある。ステップS40と同様に、立寄施設設定メニューのいずれかの項目が選択され、選択されたメニューに応じた検索条件が入力される。この検索条件と一致する施設データに対応する施設が立寄施設として設定される。この設定された立寄施設に対応する施設データにおける施設名称が、第2の記憶装置81に記憶される。
【0034】
ステップS60では、車両が走行中であるか否かを判定する。具体的には、例えば、車速センサ14からの信号に基づいて検出された車速が0km/hでないか否かを判定する。車速が0km/hであると判定された場合、ステップS70に進む。ステップS70では、立ち寄り判定処理が実行される。この立ち寄り判定処理を図3のフローチャートを用いて説明する。
【0035】
図3のフローチャートにおいて、まず、ステップS210では、ステップS50にて設定された立寄施設の中で、自車両が立ち寄っていない立寄施設に対応する施設に自車両が到達したか否かを判定する。具体的には、例えば、コンピュータ30は、第2の記憶装置81に記憶されている施設名称に対応する施設データを、デジタル道路地図データベース20から抽出する。そして、コンピュータ30は、抽出した施設データにおける緯度・経度の座標データ(xi、yi)(i=1…n、n:抽出した施設データの数)のいずれかと、位置検出器10によって検出された現在位置の座標データ(x、y)との差分値の絶対値が所定値(a、b)以下であるか否かを判定する。差分値の絶対値が所定値(a、b)以下でないと判定された場合、立ち寄り判定処理を終了する。一方、差分値の絶対値が所定値(a、b)以下であると判定された場合、ステップS220に進む。
【0036】
ステップS220では、コンピュータ30は、自車両が立寄施設に到達してからの停滞時間のカウントを開始または継続する。ステップS230では、停滞時間が所定時間(例えば、5分)に達したか否かを判定する。停滞時間が所定時間に達してないと判定された場合、ステップS240に進む。
【0037】
ステップS240では、到達した立寄施設から自車両が離れたか否かを判定する。具体的には、例えば、ステップS210にて判定に用いられた緯度・経度の座標データ(xi、yi)と、位置検出器10によって検出された現在位置の座標データ(x、y)との差分値の絶対値が所定値(a、b)より大きいか否かを判定する。差分値の絶対値が所定値(a、b)より大きくないと判定された場合、ステップS220に戻る。一方、差分値の絶対値が所定値(a、b)より大きいと判定された場合、立ち寄り判定処理を終了する。
【0038】
ステップS230において、停滞時間が所定時間に達したと判定された場合、ステップS250に進む。ステップS250では、コンピュータ30は、第2の記憶装置81から、到達した立寄施設に対応する施設データにおける施設名称を消去する。
【0039】
図2のフローチャートに戻り、ステップS60において、車速が0km/hでないと判定された場合、ステップS80に進む。ステップS80では、コンピュータ30のRAMに記憶されている最終目的地近接フラグが「1」にセットされているか否かを判定する。最終目的地近接フラグが「1」にセットされていないと判定された場合、ステップS90に進む。
【0040】
ステップS90では、ステップS10にて検出された現在位置から最終目的地までの直線距離が500m以下になったか否かを判定する。直線距離が500m以下になっていないと判定された場合、そのまま待機状態となる。一方、直線距離が500m以下になったと判定された場合、ステップS100に進む。
【0041】
ステップS100では、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。具体的には、コンピュータ30は、第2の記憶装置81に、設定された立寄施設のいずれかが記憶されているか否かを判定する。このようにすることにより、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定することができる。
【0042】
ステップS100において、設定された立寄施設のいずれかが記憶されていると判定された場合、ステップS110に進む。ステップS110では、例えば、図4に示すような第1のリスト警告画面310が表示部40に表示される。図4の例では、第1のリスト警告画面310には、「下記の立寄施設に立ち寄っていません!!」というメッセージが表示され、当該メッセージの下側には、立ち寄っていない立寄施設のリストとして、「ブックストアB」、「酒屋Z」が表示されている。これにより、ユーザは立ち寄っていない立寄施設を把握することができる。
【0043】
なお、第1のリスト警告画面310は、表示部40に表示されてからの経過時間が所定時間(例えば、1分)に達した場合、表示部40から消える。また、第1のリスト警告画面310の右下側にある「OK」項目が選択されることによっても、第1のリスト警告画面310が表示部40から消える。
【0044】
ステップS100において、設定された立寄施設のいずれも記憶されていないと判定された場合、ステップS120に進む。ステップS120では、コンピュータ30は、RAMに記憶されている最終目的地近接フラグを「1」にセットする。例えば、最終目的地周辺の道路が蛇行していることが考えられる。この場合、自車両が立ち寄っていない立寄施設のリストの表示が複数回行なわれる可能性があるため、ユーザが煩わしく感じるおそれがある。このため、コンピュータ30は、自車両が立ち寄っていない立寄施設のリストの表示を行なった後は、自車両の現在位置から最終目的地までの距離が、700m以上にならない限り、再度、現在位置と最終目的地の距離が500m以下となったときに、自車両が立ち寄っていない立寄施設のリストの表示を中止する。
【0045】
ステップS80において、最終目的地近接フラグが「1」にセットされていると判定された場合、ステップS130に進む。ステップS130では、ステップS10にて検出された現在位置から最終目的地までの直線距離が700m以上になったか否かを判定する。直線距離が700m以上になったと判定された場合、ステップS140に進む。
【0046】
ステップS140では、コンピュータ30は、RAMに記憶されている最終目的地近接フラグを「0」にリセットする。
【0047】
ステップS130において、直線距離が700m以上になっていないと判定された場合、ステップS150に進む。ステップS150では、設定された最終目的地に対応する施設に自車両が到達したか否かを判定する。具体的には、例えば、第1の記憶装置80に記憶されている最終目的地に対応する施設データにおける緯度・経度の座標データ(x0、y0)と、位置検出器10によって検出された現在位置の座標データ(x、y)との差分値の絶対値が所定値(a、b)以下であるか否かを判定する。差分値の絶対値が所定値(a、b)以下でないと判定された場合、ステップS80に戻る。一方、差分値の絶対値が所定値(a、b)以下であると判定された場合、コンピュータ30は、第1の記憶装置80に記憶されている緯度・経度の座標データ(x0、y0)を消去する。また、第2の記憶装置81に、設定された立寄施設に対応する施設データにおける施設名称が記憶されている場合には、コンピュータ30は、当該施設データにおける施設名称を消去する。そして、コンピュータ30は、処理を終了する。
【0048】
なお、ステップS40にて最終目的地としてユーザの自宅が設定された(第1の記憶装置80にユーザの自宅の位置に対応する緯度・経度の座標データ(x´、y´)のみが記憶されている)場合、ステップS150において、第1の記憶装置80に記憶されているユーザの自宅の位置に対応する緯度・経度の座標データ(x´、y´)と、位置検出器10によって検出された現在位置の座標データ(x、y)との差分値の絶対値が所定値(a、b)以下であるか否かを判定すれば良い。なお、差分値の絶対値が所定値(a、b)以下であると判定された場合であっても、コンピュータ30は、第1の記憶装置80に記憶されているユーザの自宅の位置に対応する緯度・経度の座標データ(x´、y´)を消去しないものとする。
【0049】
以上、説明したように本実施形態によれば、ユーザによって最終目的地及び立寄施設が設定された場合、設定された立寄施設の中で、自車両の状態に基づいて、立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。コンピュータ30は、自車両の現在位置から最終目的地までの距離が500m以下になったときに、自車両が立ち寄っていない立寄施設がある場合には、自車両が立ち寄っていない立寄施設がある旨の警告を行なうことができるようにした。このようにすることにより、ユーザは、最終目的地に到達する前に、立ち寄るべき施設があることを思い出すことができる。これにより、ユーザの所望の施設を通過するように、目的地まで経路案内を行なうことなく、ユーザが所望の施設に立ち寄るという目的を忘れることを防止することができる。
【0050】
なお、本発明は、上述した実施形態になんら制限されることなく、本発明の主旨を逸脱しない範囲において、種々変形して実施することができる。
【0051】
例えば、上述した実施形態において、ユーザによって最終目的地及び立寄施設を設定させる例について説明した。しかしながら、最終目的地及び立寄施設に加えて、立寄施設に立ち寄る予定時刻を設定させても良い。
【0052】
具体的には、例えば、立寄施設に立ち寄る予定時刻が設定された場合、設定された予定時刻と、設定された立寄施設に対応する施設データにおける施設名称とが一対一に対応するように第2の記憶装置81に記憶される。コンピュータ30は、第2の記憶装置81に記憶されている予定時刻と現在時刻との差が所定時間(例えば、1時間)に達するか否かを判定する。所定時間に達したと判定された場合、例えば、図5に示すような第2のリスト警告画面320が表示部40に表示される。図5の例では、第2のリスト警告画面320には、「下記の立寄施設に下記の時刻に立ち寄ってください!!」というメッセージが表示され、当該メッセージの下側には、「スーパーCに、17:00に立ち寄ってください!!」が表示されている。これにより、ユーザが所望の立寄施設に予定時刻に立ち寄るという目的を忘れることを防止することができる。
【0053】
また、上述した実施形態において、コンピュータ30のRAMに記憶されている最終目的地近接フラグが「0」にリセットされており、かつ自車両の現在位置から最終目的地の施設位置までの直線距離が500m以下になった場合、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する例について説明した。しかしながら、エンジンの動作状態に基づいて、車両のエンジンがオフからオンされた場合、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定しても良い。
【0054】
具体的には、例えば、コンピュータ30には、エンジンをオン、オフするための信号を出力するイグニッションSW(図示せず)が接続され、このイグニッションSWからコンピュータ30に出力される信号が、オフ信号からオン信号に変更されたか否かを判定する。オフ信号からオン信号に変更されたと判定された場合、コンピュータ30は、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。そして、設定された立ち寄り地のいずれかに自車両が立ち寄っていないと判定された場合、例えば、上述した、図4に示すような第1のリスト警告画面310が表示部40に表示される。
【0055】
さらに、上述した実施形態において、施設毎に、立寄施設を設定する例について説明した。しかしながら、立寄施設として、特定の施設ではなく、立ち寄るべき施設の種類を設定しても良い。
【0056】
具体的には、例えば、立寄施設として、施設種類が設定された場合には、コンピュータ30は、設定された施設種類を第2の記憶装置81に記憶させる。そして、自車両の車速が0km/hであると判定された場合、コンピュータ30は、位置検出器10によって検出された現在位置の座標データ(x、y)を中心とする半径c(m)の円内において、第2の記憶装置81に記憶されている施設種類に該当する施設データを、デジタル道路地図データベース20から抽出する。そして、第2の記憶装置81に記憶されている施設種類に該当する施設データが抽出された場合、コンピュータ30は、当該施設データに対応する立寄施設における停滞時間をカウントする。このカウントされた停滞時間が所定時間に達したと判定された場合には、コンピュータ30は、第2の記憶装置81から、当該立寄施設に対応する施設種類を消去する。
【0057】
そして、コンピュータ30は、RAMに記憶されている最終目的地近接フラグが「0」にリセットされており、かつ自車両の現在位置から最終目的地の施設位置までの直線距離が500m以下になった場合に、設定された立寄施設のいずれかに自車両が立ち寄っていないか否かを判定する。立寄施設のいずれかに自車両が立ち寄っていないと判定された場合、第2の記憶装置81に記憶されている施設種類のリストが表示部40に表示される。
【図面の簡単な説明】
【0058】
【図1】本実施形態による車載ナビゲーション装置100の概略構成を示すブロック図である。
【図2】本実施形態における、警告表示制御処理のメインルーチンを示すフローチャートである。
【図3】本実施形態における、立ち寄り判定処理のルーチンを示すフローチャートである。
【図4】本実施形態における、第1のリスト警告画面310の表示例を示すイメージ図である。
【図5】本実施形態における、第2のリスト警告画面320の表示例を示すイメージ図である。
【符号の説明】
【0059】
10…位置検出器
11…GPS受信機
12…地磁気センサ
13…ステアリングセンサ
14…車速センサ
20…デジタル道路地図データベース
21…情報記録媒体
30…コンピュータ
40…表示部
50…操作スイッチ群
60…音声出力部
70…音声入力部
80…第1の記憶装置
81…第2の記憶装置
90…VICS受信機
【特許請求の範囲】
【請求項1】
自車両の現在位置を検出する現在位置検出手段と、
道路地図に関する地図データ及び当該道路地図上の施設に関する施設データを記憶するデータ記憶手段と、
前記施設データに基づいて、最終目的地及び立寄施設をユーザによって設定させる設定手段と、
前記設定された立寄施設の中で、前記自車両の状態に基づいて、前記設定された立寄施設のいずれかに当該自車両が未立ち寄りであるか否かを判定する判定手段と、
前記現在位置から前記最終目的地までの距離が第1の所定距離以下になり、かつ前記判定手段によって前記立寄施設のいずれかに前記自車両が未立ち寄りであると判定された場合、未立ち寄りの立寄施設がある旨を警告する警告手段とを備えることを特徴とする車載ナビゲーション装置。
【請求項2】
前記警告手段は、一旦、前記未立ち寄りの立寄施設がある旨の警告をした後は、前記現在位置から前記最終目的地までの距離が、前記第1の所定距離より長い第2の所定距離以上にならない限り、再度、前記現在位置と前記最終目的地の距離が前記第1の所定距離以下となったときに、前記未立ち寄りの立寄施設がある旨の警告を中止することを特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項3】
現在時刻を取得する現在時刻取得手段と、
前記設定手段は、前記最終目的地及び前記立寄施設に加えて、当該立寄施設に立ち寄る予定時刻をユーザによって設定させ、
前記警告手段は、前記設定された予定時刻と前記取得した現在時刻との差が第1の所定時間に達した場合、当該予定時刻に立ち寄るべき立寄施設がある旨を警告することを特徴とする請求項1または請求項2に記載の車載ナビゲーション装置。
【請求項4】
表示部を備え、
前記警告手段は、前記未立ち寄りの立寄施設のリストを前記表示部に表示することを特徴とする請求項1乃至請求項3のいずれかに記載の車載ナビゲーション装置。
【請求項5】
前記判定手段は、
前記設定された立寄施設を記憶する立寄施設記憶手段と、
前記立寄施設記憶手段によって記憶された立寄施設に前記現在位置が到達したか否かを判定する到達判定手段と、
前記到達判定手段によって前記立寄施設に前記現在位置が到達したと判定された場合、当該立寄施設に当該現在位置が停滞している停滞時間をカウントするカウント手段と、
前記カウントされた停滞時間が第2の所定時間に達した場合、前記立寄施設記憶手段に対して、前記現在位置が到達した立寄施設を消去させる消去手段とを有し、
前記立寄施設記憶手段に前記立寄施設が記憶されているか否かに基づいて、前記設定された立寄施設のいずれかに前記自車両が未立ち寄りであるか否かを判定することを特徴とする請求項1乃至請求項4のいずれかに記載の車載ナビゲーション装置。
【請求項1】
自車両の現在位置を検出する現在位置検出手段と、
道路地図に関する地図データ及び当該道路地図上の施設に関する施設データを記憶するデータ記憶手段と、
前記施設データに基づいて、最終目的地及び立寄施設をユーザによって設定させる設定手段と、
前記設定された立寄施設の中で、前記自車両の状態に基づいて、前記設定された立寄施設のいずれかに当該自車両が未立ち寄りであるか否かを判定する判定手段と、
前記現在位置から前記最終目的地までの距離が第1の所定距離以下になり、かつ前記判定手段によって前記立寄施設のいずれかに前記自車両が未立ち寄りであると判定された場合、未立ち寄りの立寄施設がある旨を警告する警告手段とを備えることを特徴とする車載ナビゲーション装置。
【請求項2】
前記警告手段は、一旦、前記未立ち寄りの立寄施設がある旨の警告をした後は、前記現在位置から前記最終目的地までの距離が、前記第1の所定距離より長い第2の所定距離以上にならない限り、再度、前記現在位置と前記最終目的地の距離が前記第1の所定距離以下となったときに、前記未立ち寄りの立寄施設がある旨の警告を中止することを特徴とする請求項1に記載の車載ナビゲーション装置。
【請求項3】
現在時刻を取得する現在時刻取得手段と、
前記設定手段は、前記最終目的地及び前記立寄施設に加えて、当該立寄施設に立ち寄る予定時刻をユーザによって設定させ、
前記警告手段は、前記設定された予定時刻と前記取得した現在時刻との差が第1の所定時間に達した場合、当該予定時刻に立ち寄るべき立寄施設がある旨を警告することを特徴とする請求項1または請求項2に記載の車載ナビゲーション装置。
【請求項4】
表示部を備え、
前記警告手段は、前記未立ち寄りの立寄施設のリストを前記表示部に表示することを特徴とする請求項1乃至請求項3のいずれかに記載の車載ナビゲーション装置。
【請求項5】
前記判定手段は、
前記設定された立寄施設を記憶する立寄施設記憶手段と、
前記立寄施設記憶手段によって記憶された立寄施設に前記現在位置が到達したか否かを判定する到達判定手段と、
前記到達判定手段によって前記立寄施設に前記現在位置が到達したと判定された場合、当該立寄施設に当該現在位置が停滞している停滞時間をカウントするカウント手段と、
前記カウントされた停滞時間が第2の所定時間に達した場合、前記立寄施設記憶手段に対して、前記現在位置が到達した立寄施設を消去させる消去手段とを有し、
前記立寄施設記憶手段に前記立寄施設が記憶されているか否かに基づいて、前記設定された立寄施設のいずれかに前記自車両が未立ち寄りであるか否かを判定することを特徴とする請求項1乃至請求項4のいずれかに記載の車載ナビゲーション装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2006−317341(P2006−317341A)
【公開日】平成18年11月24日(2006.11.24)
【国際特許分類】
【出願番号】特願2005−141541(P2005−141541)
【出願日】平成17年5月13日(2005.5.13)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年11月24日(2006.11.24)
【国際特許分類】
【出願日】平成17年5月13日(2005.5.13)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]