
車載ナビゲーション装置
【課題】地図データに未登録の高速道路を自車両が走行中であることをより精度良く判別することを可能にする。
【解決手段】電波ビーコン受信機27で高速道路に設けられた電波ビーコンからの電波を受信したときに、制御装置28で算出したマッチング確度が未登録高速道路判別用閾値以下であった場合には、自車両が地図データに未登録の高速道路を走行中であるものと制御装置28で判別し、経路案内を中止する。
【解決手段】電波ビーコン受信機27で高速道路に設けられた電波ビーコンからの電波を受信したときに、制御装置28で算出したマッチング確度が未登録高速道路判別用閾値以下であった場合には、自車両が地図データに未登録の高速道路を走行中であるものと制御装置28で判別し、経路案内を中止する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載ナビゲーション装置に関するものである。
【背景技術】
【0002】
従来から、車両のドライバを所定の目的地まで誘導する経路案内を行ったり、任意の地図を表示させたりする装置として、車載ナビゲーション装置が知られている。また、車載ナビゲーション装置では、自車両に設けられた各センサの信号をもとに検出された現在位置から特定される走行軌跡と電子地図(つまり、地図データ)上の道路データとを照合することによって、自車両の走行軌跡を地図上の道路にマッチングさせるマップマッチングを行っていることが知られている。
【0003】
しかしながら、従来の技術では、地図データに未登録である新規の高速道路を自車両が走行中の場合に、周辺の一般道路に自車両の走行軌跡を無理にマッチングさせてしまう誤ったマップマッチングを繰り返し、誤った経路案内を繰り返してしまうという問題点があった。
【0004】
これに対して、例えば、特許文献1および2には、高速道路上に設置されている電波ビーコンからの電波と一般道路上に設置されている光ビーコンからの光とのうちのいずれを車載ナビゲーション装置で受信しているかによって、現在の自車両が高速道路上にいるのか一般道路上にいるのかを判断する技術が開示されている。
【0005】
特許文献1および2に開示されている技術では、地図データに未登録の高速道路を走行中に、高速道路を走行中であることは判断できるものの、あくまで全ての高速道路のデータが地図データに含まれることを前提としているものであるため、未登録の高速道路を走行中であることを判断することはできない。
【0006】
そこで、この問題を解決する手段として、例えば、特許文献3には、ETCの入口ゲートや出口ゲートの通過時の通知を利用して未登録の新設有料道路を走行中か否かを判定する技術が開示されている。詳しくは、特許文献3に開示の技術では、ETC車載機から有料道路の入口ゲート通過が通知された際に現在位置周辺にインターチェンジが存在しない場合、もしくは、ETC車載機から有料道路の出口ゲート通過が通知されることなく、現在位置が有料道路上の位置から有料道路外の位置に変化した場合に、地図データに未登録の新設有料道路を走行中と判定する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平8−189956号公報
【特許文献2】特開平11−83505号公報
【特許文献3】特開2009−92533号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献3に開示の技術は、地図データに未登録の高速道路を精度良く判別することができないという問題を有していた。詳しくは、高速道路の出入口に必ずしもETCゲートがあるとは限らず、均一料金精算タイプの高速道路の場合には高速道路の半ばにETCゲートがある場合もあるため、この場合には高速道路の半ばに至るまで、未登録の高速道路を走行中であることを判別できない。また、無料化された高速道路の場合にはETCゲートが存在しないことも考えられるが、この場合には未登録の高速道路を走行中であることを全く判別できない。
【0009】
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、地図データに未登録の高速道路を自車両が走行中であることをより精度良く判別することを可能にする車載ナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0010】
請求項1の車載ナビゲーション装置によれば、高速道路に設けられた電波ビーコンからの電波を受信するので、電波ビーコンからの電波を受信したことを利用して、車両が高速道路を走行中であることを推定することができる。
【0011】
また、請求項1の構成によれば、電波ビーコンからの電波を受信しており、高速道路を走行中と推定されるときに、マッチング確度算出手段で算出したマッチング確度(つまり、マップマッチング手段でのマッチングの確かさを示す指標)が第1の所定の閾値以下であった場合には、車両が地図データに未登録の高速道路を走行中であるものと判別することになる。マッチング確度が低い場合には、地図データに未登録の道路を走行中である可能性が高いため、以上の構成によれば、高速道路を走行中ではあるが地図データに未登録の道路を走行中であることを判別することが可能になる。つまり、以上の構成によれば、地図データに未登録の高速道路を自車両が走行中であることを判別することが可能になる。
【0012】
また、高速道路に設けられた電波ビーコンは、一般的に交通道路情報を送信することを目的としており、ETCゲートのように課金処理に関する情報を送信することを目的としたものではない。よって、電波ビーコンからの電波を受信したことを利用することにより、無料化された高速道路であっても、車両が高速道路を走行中であることを判別することが可能になる。さらに、車載ナビゲーション装置において一般的にマッチングは逐次行われている。
【0013】
従って、以上の構成によれば、電波ビーコンからの電波を受信したこととマッチング確度とを利用することにより、高速道路上においてETCゲートの存在の有無や走行場所によらずに、地図データに未登録の高速道路を自車両が走行中であることをより精度良く判別することが可能になる。
【0014】
また、請求項2の構成によれば、電波ビーコンからの電波を受信するまでは、第2の所定の閾値よりも高いマッチング確度でマッチングする道路を車両の走行中の道路として特定することになる。また、一方、電波ビーコンからの電波を受信した後は、第2の所定の閾値よりも高い値が設定されている第1の所定の閾値よりも高いマッチング確度でマッチングする道路のみを車両の走行中の道路と特定し、第1の所定の閾値以下のマッチング確度でマッチングする道路しか存在しない場合に、車両が地図データに未登録の高速道路を走行中と判別することになる。
【0015】
つまり、以上の構成によれば、電波ビーコンからの電波を受信し、高速道路を走行中と推定されるまでは、従来まで用いられていたのと同様の比較的緩いマッチング確度で車両の走行中の道路を特定する一方、電波ビーコンからの電波を受信し、高速道路を走行中と推定された後は、従来まで用いられていたものよりも厳しいマッチング確度で車両の走行中の道路を特定することが可能になる。
【0016】
よって、以上の構成によれば、電波ビーコンからの電波を受信し、高速道路を走行中と推定された後は、第1の所定の閾値によって厳密に、車両が地図データに未登録の高速道路を走行中か否かを判別することが可能になる一方、電波ビーコンからの電波を受信し、高速道路を走行中と推定されるまでは、従来まで用いられていたのと同様の第2の所定の閾値によって従来までと同様に、マップマッチング手段で地図上の道路における車両の現在位置を特定することが可能になる。
【0017】
なお、地図データに未登録の一般道路はその距離が長いことは一般的に少なく、すぐに地図データに登録された道路に接続されるものと思われるため、誤った経路案内が生じた場合でも、すぐに正しい経路案内に復帰できる可能性が高い。よって、マッチングの条件を厳しくしてまで未登録の一般道路を自車両が走行中であることを判別する必要性は低いと考えられる。一方、地図データに未登録の高速道路はその距離が長いことが一般的であるため、すぐに地図データに登録された道路に接続されることがなく、誤った経路案内が生じた場合に誤った経路案内が繰り返され続ける可能性が高い。よって、マッチングの条件を厳しくしてまで未登録の高速道路を自車両が走行中であることを判別する必要性が高いと考えられる。従って、請求項2の構成によれば、マッチングの条件を厳しくする状況を、必要性が高い場合にのみ抑えることが可能になる。
【0018】
なお、特許文献3に開示の技術では、地図データに未登録の有料道路を走行していると判別している間、現在位置から目的地までの移動経路の更新を禁止する技術が開示されているが、誤った移動経路が案内されていることには変わりがないため、ユーザが煩わしさを感じてしまうという問題点を有していた。
【0019】
これに対して、請求項3の構成によれば、車両が地図データに未登録の高速道路を走行中であるものと判別した場合に、移動経路の案内を中止するので、誤った移動経路が案内されることがなく、ユーザに煩わしさを感じさせずに済む。
【0020】
また、請求項4のように、移動経路の案内を中止している間、車両が地図データに未登録の高速道路を走行中であることを示す提示を行う態様としてもよい。これによれば、車両が地図データに未登録の高速道路を走行中であるために移動経路の案内が中止されていることをユーザが容易に知ることができるので、故障のために移動経路の案内が中止されている場合と容易に区別することができ、ユーザを混乱させずに済む。
【0021】
また、請求項5のように、マップマッチング手段で地図上の道路における車両の現在位置を逐次特定し続け、マッチング確度算出手段で算出したマッチング確度が第1の所定の閾値よりも高くなった場合に、移動経路の案内の中止を解除する態様としてもよい。これによれば、自車両が地図データに未登録の高速道路から地図データに登録された道路に移り、高いマッチング確度でマッチングが行われるようになったときに、移動経路の案内の中止を解除することが可能になる。つまり、以上の構成によれば、正しい移動経路の案内が可能になった場合に、移動経路の案内を再開させることが可能になる。
【0022】
また、請求項6のように、移動経路の案内は、マップマッチング手段で特定した現在位置から車両が目的地に到達できる移動経路の案内である態様としてもよい。
【図面の簡単な説明】
【0023】
【図1】車載ナビゲーション装置1の概略的な構成を示すブロック図である。
【図2】車載ナビゲーション装置1の制御装置28での未登録高速道路判別関連処理のフローを示すフローチャートである。
【図3】(a)および(b)は経路案内時の表示装置19の画面の一例を示す模式図である。
【発明を実施するための形態】
【0024】
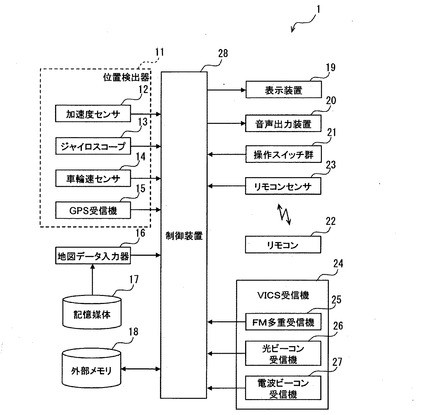
以下、本発明の実施形態について図面を用いて説明する。図1は、本発明が適用された車載ナビゲーション装置1の概略的な構成を示すブロック図である。図1に示す車載ナビゲーション装置1は、車両に搭載されるものであり、位置検出器11、地図データ入力器16、記憶媒体17、外部メモリ18、表示装置19、音声出力装置20、操作スイッチ群21、リモコン22、リモコンセンサ23、VICS(登録商標)受信機24、およびこれらと接続された制御装置28を備えている。なお、車載ナビゲーション装置1を搭載している車両を以降では自車両と呼ぶ。
【0025】
位置検出器11は、車両の鉛直方向周りの角速度を検出するジャイロスコープ12、自車両の加速度を検出する加速度センサ13、各転動輪の回転速度から自車両の速度を検出する車輪速センサ14、および人工衛星からの電波に基づいて車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機15を有しており、定期的に自車両の現在位置および進行方向の検出を行う。よって、位置検出器11が請求項の位置方向検出手段に相当する。これらの各センサ12〜15は、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、精度によっては上述した内の一部で構成してもよく、さらに、図示しない地磁気センサやステアリングの回転センサ等を用いてもよい。
【0026】
なお、車載ナビゲーション装置1では、自律航法と電波航法とを組み合わせたハイブリッド航法によって自車両の現在位置を定期的に特定する。そして、定期的に特定した現在位置および進行方向から得られる自車両の走行軌跡と後述する道路データとを照合することによって自車両の走行軌跡を道路上にマッチングさせ、地図上の道路における自車両の現在位置を特定する。なお、自律航法とは、ジャイロスコープ12等の方位センサの測定値と加速度センサ13や車輪速センサ14の測定値とから自車両の現在位置を推定する方法である。また、電波航法とは、複数の人工衛星からの電波に基づいてGPS受信機15で自車両の座標(緯度・経度)を測位し、現在位置を推定する方法である。なお、定期的に特定した現在位置から得られる自車両の走行軌跡と後述する道路データとを照合することによって自車両の走行軌跡を道路上にマッチングさせ、地図上の道路における自車両の現在位置を特定する処理を本実施形態ではマップマッチング処理と呼ぶこととする。
【0027】
地図データ入力器16は、記憶媒体17が装着され、その記憶媒体17に格納されている位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、および目印データを含む各種データを入力するための装置である。地図データには、道路を示すリンクデータとノードデータとが含まれる。なお、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンク方向、リンク方位、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別、道路幅員、車線数、右折・左折専用車線の有無とその専用車線の数、および制限速度等の各データから構成される。よって、記憶媒体17が請求項の地図データ記憶手段に相当する。
【0028】
一方、ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、および交差点種類等の各データから構成される。
【0029】
また、記憶媒体17には、各種施設の種類、名称、住所のデータなども記憶されており、それらのデータは経路探索の際の目的地設定などに用いられる。なお、記憶媒体17としては、CD−ROMまたはDVD−ROM、メモリカード、HDD等が用いられる。
【0030】
外部メモリ18は、HDD等の書き込み可能な大容量記憶装置である。外部メモリ18には大量のデータや電源をOFFしても消去してはいけないデータを記憶したり、頻繁に使用するデータを地図データ入力器16からコピーして利用したりする等の用途がある。
【0031】
表示装置19は、車両の走行を案内するための地図や目的地選択画面等を表示するものであって、例えばフルカラー表示が可能なものであり、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等を用いて構成することができる。音声出力装置20は、スピーカ等から構成され、制御装置28の指示に基づいて、経路案内時の案内音声などを出力する。
【0032】
操作スイッチ群21は、例えば表示装置19と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作により制御装置28へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の操作指示を行う。また、操作スイッチ群21は、出発地および目的地を設定するためのスイッチを含んでいる。そのスイッチを操作することによって、ユーザ(つまり、自車両の乗員)は、予め登録しておいた地点、施設名、電話番号、住所などから、出発地および目的地を設定することができる。
【0033】
リモコン22には複数の操作スイッチ(図示せず)が設けられ、スイッチ操作によりリモコンセンサ23を介して各種指令信号を制御装置28に入力することにより、操作スイッチ群21と同じ機能を制御装置28に対して実行させることが可能である。
【0034】
VICS受信機24は、各地のFM放送局を介して、VICSセンタから配信される渋滞情報等の道路交通情報を受信するFM多重受信機25、一般道路に敷設された光ビーコンを介して、VICSセンタから配信される渋滞情報等の道路交通情報を受信する光ビーコン受信機26、高速道路に敷設された電波ビーコンを介して、VICSセンタから配信される渋滞情報等の道路交通情報を受信する電波ビーコン受信機27を備えている。また、VICS受信機24は、受信した道路交通情報を制御装置28に出力する。なお、ここで言うところの高速道路とは、例えば高速自動車国道や都市高速道路や自動車専用道路を示している。また、一般道路とは、例えば上記高速道路以外の道路を示している。
【0035】
なお、FM多重受信機25は、FM放送波に多重化して上述のFM放送局から送信される道路交通情報を受信し、光ビーコン受信機26は、上述の光ビーコンから光によって送信される道路交通情報を受信し、電波ビーコン受信機27は、上述の電波ビーコンから電波によって送信される道路交通情報を受信する。よって、電波ビーコン受信機27が請求項の電波受信手段に相当する。
【0036】
制御装置28は、CPU、ROM、RAM、バックアップRAM等よりなるマイクロコンピュータを主体として構成される。そして、制御装置28は、位置検出器11、地図データ入力器16、外部メモリ18、操作スイッチ群21、リモコンセンサ23、VICS受信機24から入力された各種情報に基づき、一般的なナビゲーション機能としての処理(例えば、地図縮尺変更処理、メニュー表示選択処理、マップマッチング処理、目的地設定処理、経路探索実行処理、経路案内処理、現在位置修正処理、再探索処理、表示画面変更処理、音量調整処理等)や後述する地図データに未登録の高速道路の判別に関連する処理(以下、未登録高速道路判別関連処理)などを実行する。
【0037】
例えば、経路探索実行処理においては、制御装置28は、操作スイッチ群21、リモコン22から出発地および目的地が入力されると、距離優先、時間優先等の予め設定された条件を満たす、目的地に到達するのに最適な移動経路(以下、案内経路)を、公知のダイクストラ法を用いて探索する。なお、出発地については、位置検出器11から入力される自車両の現在位置を用いる構成としてもよい。
【0038】
また、経路案内処理においては、例えば制御装置28は、経路探索実行処理において探索された案内経路(具体的には案内経路を示すマークや線など)を、表示装置19に表示する地図上に重畳表示させことによって経路案内を行ったり、その案内経路に沿った目的地までの走行を誘導する案内表示を表示装置19に行わせたり、その案内経路に沿った目的地までの走行を誘導する案内音声を音声出力装置20に出力させたりすることによっても経路案内を行う。
【0039】
さらに、マップマッチング処理においては、制御装置28は、前述したように、位置検出器11から定期的に特定した現在位置および進行方向から得られる自車両の走行軌跡と道路データとを照合することによって自車両の走行軌跡を道路(詳しくは道路データのうちのリンク)上にマッチングさせ、地図上の道路における自車両の現在位置を特定する。よって、制御装置28が請求項のマップマッチング手段に相当する。
【0040】
また、制御装置28は、マップマッチング処理において、自車両の走行軌跡と道路データのうちのリンクとのマッチングがどれくらい確からしいかというマッチングの確からしさを示す指標であるマッチング確度を算出する。よって、制御装置28が請求項のマッチング確度算出手段に相当する。なお、マッチング確度は、公知の方法によって算出する構成とすればよい。例えばマッチング確度は、自車両の各種センサの異常(断線・短絡等による故障)、車両の各種センサの状態(GPS受信状況・センサ学習状況)、マッチングにおける形状相関や方位ずれ、マッチング候補の数などをもとに算出されるものとする。
【0041】
そして、制御装置28は、マップマッチング処理において、マッチング確度が通常時に設定の閾値(以下、通常設定閾値)よりも高かった場合に、自車両の走行軌跡とマッチングした道路を自車両が走行中の道路とし、地図上の道路における自車両の現在位置を特定する。また、ここで言うところの通常設定閾値とは、一般的なナビゲーション装置において自車両の走行軌跡とマッチングしたか否かを判定する際に用いられる閾値と同様の値のものであって、マッチングの条件を定めるものである。なお、通常設定閾値が請求項の第2の所定の閾値に相当する。
【0042】
なお、本実施形態では、マッチング確度が通常設定閾値よりも高かった場合に、自車両の走行軌跡とマッチングした道路を自車両が走行中の道路とし、地図上の道路における自車両の現在位置を特定する構成を示したが、必ずしもこれに限らない。例えば、通常設定閾値とは関係なく、最も高いマッチング確度でマッチングした道路を自車両が走行中の道路とする構成としてもよい。
【0043】
また、制御装置28は、マップマッチング処理を逐次実行し、地図上の道路における自車両の現在位置を逐次特定し続ける。そして、例えば自車両が案内経路を外れたと制御装置28が判断した場合には、自車両の現在位置から目的地までの移動経路を再度探索する再探索処理を行って、自車両の現在位置から目的地までの案内経路を探索し直し、その案内経路について経路案内を行う。なお、再探索処理においても経路探索実行処理と同様にして案内経路を探索する構成とすればよい。
【0044】
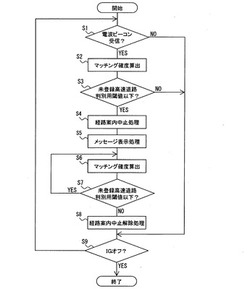
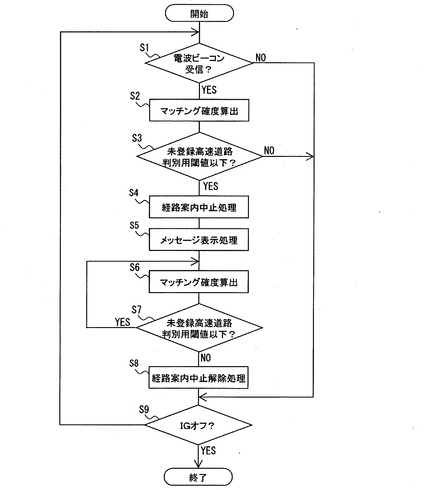
次に、図2を用いて、車載ナビゲーション装置1の制御装置28での未登録高速道路判別関連処理のフローについての説明を行う。図2は、車載ナビゲーション装置1の制御装置28での未登録高速道路判別関連処理のフローを示すフローチャートである。なお、本フローは、車載ナビゲーション装置1の制御装置28で経路案内処理が実行され、経路案内が開始されたときに開始される。つまり、本フローの開始時点においては、案内経路が表示装置19に表示されており、例えばその案内経路についての表示装置19での案内表示や音声出力装置20からの案内音声の出力も開始されているものとする。
【0045】
まず、ステップS1では、電波ビーコン受信機27で電波を受信したか否かを制御装置28が判定する。制御装置28は、例えば電波ビーコン受信機27から道路交通情報が入力された場合に、電波ビーコン受信機27で電波を受信したと判定する構成とすればよい。そして、電波ビーコン受信機27で電波を受信した場合(ステップS1でYES)には、ステップS2に移る。また、電波ビーコン受信機27で電波を受信したと判定しなかった場合(ステップS1でNO)には、ステップS9に移る。
【0046】
ステップS2では、電波ビーコン受信機27で電波を受信したと判定したときにおける前述のマッチング確度を制御装置28が算出し、ステップS3に移る。なお、電波ビーコン受信機27で電波を受信したと判定したときとは、電波ビーコン受信機27で電波を受信したと判定した瞬間に限定されるものではなく、電波ビーコン受信機27で電波を受信したと判定した瞬間に前後する時間も含まれるものとする。
【0047】
ステップS3では、ステップS2で算出したマッチング確度が、地図データに未登録の高速道路の判別用の閾値(以下、未登録高速道路判別用閾値)以下であるか否かを制御装置28が判定する。なお、ここで言うところの未登録高速道路判別用閾値とは、通常設定閾値が車載ナビゲーション装置1で用いられている場合にはこの通常設定閾値よりも高い値に設定される、任意の閾値である。なお、未登録高速道路判別用閾値が請求項の第1の所定の閾値に相当する。そして、マッチング確度が未登録高速道路判別用閾値以下であると判定した場合(ステップS3でYES)には、ステップS4に移る。また、マッチング確度が未登録高速道路判別用閾値以下であると判定しなかった場合(ステップS3でNO)には、ステップS9に移る。
【0048】
ステップS4では、地図データに未登録の高速道路を自車両が走行中であるものと制御装置28が判別し、経路案内中止処理を行ってステップS5に移る。よって、制御装置28が請求項の未登録高速道路判別手段にも相当する。経路案内中止処理では、制御装置28が経路案内を中止させる。つまり、表示装置19での案内経路の表示を中止させたり、案内経路についての表示装置19での案内表示や音声出力装置20からの案内音声の出力を中止させたりする。なお、この場合、表示装置19での地図の表示も中止させる構成であってもよいし、地図の表示は中止させない構成としてもよい。
【0049】
ステップS5では、メッセージ表示処理を行い、ステップS6に移る。メッセージ表示処理では、地図データに未登録の高速道路を自車両が走行中であるため経路案内を中止している特殊なモードであることをユーザに知らせる旨の表示を制御装置28が表示装置19に行わせる。例えば表示装置19の画面上部に「新規高速道路走行中」などのオンスクリーンメッセージを表示させる構成とすればよい。また、例えば表示装置19の画面内に新規高速道路を走行中であることを示すアイコンを表示させる構成としてもよい。
【0050】
ステップS6では、前述のマッチング確度を制御装置28が算出し、ステップS7に移る。ステップS7では、ステップS6で算出したマッチング確度が、未登録高速道路判別用閾値以下であるか否かを制御装置28が判定する。そして、マッチング確度が未登録高速道路判別用閾値以下であると判定した場合(ステップS7でYES)には、ステップS6に戻ってフローを繰り返す。また、マッチング確度が未登録高速道路判別用閾値以下であると判定しなかった場合(ステップS7でNO)には、ステップS8に移る。ステップS8では、経路案内中止解除処理を行い、ステップS9に移る。経路案内中止解除処理では、制御装置28が経路案内の中止を解除して経路案内を再開させる。
【0051】
つまり、経路案内を中止するモードに移行した後も、経路案内は行わないものの、マップマッチング処理は逐次実行し、未登録高速道路判別用閾値よりも高いマッチング確度でマッチングする道路(高速道路および一般道路のいずれであってもよい)が現れた場合に、経路案内を再開することになる。
【0052】
ステップS9では、自車両のイグニッション(IG)スイッチがオフになった場合(ステップS9でYES)には、フローを終了する。また、自車両のIGスイッチがオフになっていない場合(ステップS9でNO)には、ステップS1に戻ってフローを繰り返す。なお、本フローは、フローの途中であっても、自車両のナビゲーション装置1が電源オフされたときに終了するものとする。
【0053】
マッチング確度が低い場合には、地図データに未登録の道路を走行中である可能性が高いため、以上の構成によれば、地図データに未登録の高速道路を自車両が走行中であることを判別することが可能になる。また、高速道路に設けられた電波ビーコンは、一般的に交通道路情報を送信することを目的としており、ETCゲートのように課金処理に関する情報を送信することを目的としたものではない。よって、電波ビーコンからの電波を受信したことを利用することにより、無料化された高速道路であっても、車両が高速道路を走行中であることを判別することが可能になる。さらに、車載ナビゲーション装置においては一般的にマッチングが逐次行われている。
【0054】
従って、以上の構成によれば、電波ビーコンからの電波を受信したこととマッチング確度とを利用することにより、高速道路上においてETCゲートの存在の有無や走行場所によらずに、地図データに未登録の高速道路を自車両が走行中であることをより精度良く判別することが可能になる。
【0055】
また、地図データに登録された一般道路を走行時に高速道路に設けられた電波ビーコンからの電波を誤受信した際にも、マップマッチング処理によって自車両の走行軌跡が当該一般道路上に高いマッチング確度でマッチングすると考えられる。よって、以上の構成によれば、当該一般道路を走行時に当該電波ビーコンからの電波を誤受信した際にも、マッチング確度が未登録高速道路判別用閾値よりも高くなる可能性が高く、当該一般道路を走行時に地図データに未登録の高速道路を走行中と判別される不具合がより生じにくい。
【0056】
さらに、以上の構成によれば、自車両が地図データに未登録の高速道路を走行中であるものと判別した場合に、経路案内を中止するので、誤った案内経路が案内されることがなく、ユーザに煩わしさを感じさせずに済む。
【0057】
また、以上の構成によれば、経路案内を中止している間、自車両が地図データに未登録の高速道路を走行中であることを示す提示を行うので、自車両が地図データに未登録の高速道路を走行中であるために移動経路の案内が中止されていることをユーザが容易に知ることができ、故障のために経路案内が中止されている場合と容易に区別することができる。従って、以上の構成によれば、ユーザを混乱させずに済む。
【0058】
さらに、以上の構成によれば、経路案内を中止するモードに移行した後もマップマッチング処理を逐次実行し、未登録高速道路判別用閾値よりも高いマッチング確度でマッチングする道路が現れた場合に経路案内を再開するので、正しい経路案内が可能になった場合に、経路案内を再開させることが可能になる。
【0059】
なお、以上の構成において、未登録高速道路判別用閾値は、通常設定閾値が車載ナビゲーション装置1で用いられている場合にはこの通常設定閾値よりも高い値に設定されていることが好ましい。
【0060】
以上の構成によれば、高速道路に設けられた電波ビーコンからの電波を受信し、高速道路を走行中と推定された後は、未登録高速道路判別用閾値によって厳密に、自車両が地図データに未登録の高速道路を走行中か否かを判別することが可能になる一方、当該電波ビーコンからの電波を受信し、高速道路を走行中と推定されるまでは、従来まで用いられていたのと同様の通常設定閾値によって従来までと同様に、マップマッチング処理で地図上の道路における自車両の現在位置を特定することが可能になる。
【0061】
なお、地図データに未登録の一般道路はその距離が長いことは一般的に少なく、すぐに地図データに登録された道路に接続されるものと思われるため、誤った経路案内が生じた場合でも、すぐに正しい経路案内に復帰できる可能性が高い。よって、マッチングの条件を厳しくしてまで未登録の一般道路を自車両が走行中であることを判別する必要性は低いと考えられる。一方、地図データに未登録の高速道路はその距離が長いことが一般的であるため、すぐに地図データに登録された道路に接続されることがなく、誤った経路案内が生じた場合に誤った経路案内が繰り返され続ける可能性が高い。よって、マッチングの条件を厳しくしてまで未登録の高速道路を自車両が走行中であることを判別する必要性が高いと考えられる。従って、以上の構成によれば、マッチングの条件を厳しくする状況を、必要性が高い場合にのみ抑えることが可能になる。
【0062】
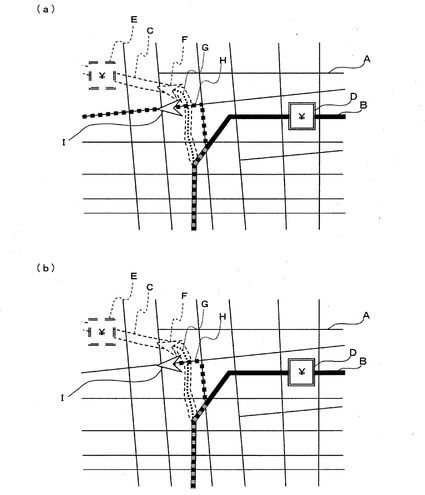
ここで、本発明における作用効果について、具体的に図3(a)および図3(b)を用いて説明を行う。図3(a)および図3(b)は、経路案内時の表示装置19の画面の一例を示す模式図である。なお、図3(a)および図3(b)中のAで示す細実線が地図データに登録された一般道路(以下、登録一般道路)を表しており、Bで示す太実線が地図データに登録された高速道路(以下、登録高速道路)を表しており、Cで示す細破線が地図データに未登録の高速道路(以下、未登録高速道路)を表している。また、図3(a)および図3(b)中のDが地図データに登録された高速道路の料金所(以下、登録料金所)を表しており、Eが地図データに未登録の高速道路の料金所(以下、未登録料金所)を表している。
【0063】
さらに、図3(a)および図3(b)中のFで示す破線の矢印が自車両の実際の現在位置(以下、実現在位置)を表しており、その矢印の向きが自車両の実際の進行方向を表している。また、図3(a)および図3(b)中のGで示す細点線が自車両の実際の走行軌跡(以下、実走行軌跡)を表しており、Hで示す太点線が案内経路を表している。そして、図3(a)および図3(b)中のIで示す実線の矢印がマップマッチング処理で特定される自車両の現在位置(以下、推定現在位置)を表しており、その矢印の向きがマップマッチング処理で特定される自車両の進行方向を表している。また、経路案内時の表示装置19の画面には、未登録高速道路C、未登録料金所E、実現在位置F、および実走行軌跡Gは表示されない。なお、案内経路Hのうちの、推定現在位置以前の部分については、マップマッチング処理で特定される自車両の走行軌跡を表示する構成としてもよい。
【0064】
自車両が登録高速道路Bを走行中の場合には、マップマッチング処理によって自車両の実走行軌跡Gが登録高速道路Bに高いマッチング確度でマッチングする可能性が高いため、図3(a)および図3(b)に示すように、案内経路Hも登録高速道路Bに沿ったものとなる。しかしながら、自車両が登録高速道路Bから未登録高速道路Cに進入した後は、未登録高速道路Cの道路データが地図データに存在しないため、マップマッチング処理によって自車両の実走行軌跡Gを未登録高速道路Cにマッチングできなくなる。
【0065】
そして、マップマッチング処理によって自車両の実走行軌跡Gを未登録高速道路Cにマッチングできないため、周辺の道路のうちの例えば最もマッチング確度の高い道路(本例では登録一般道路A)に自車両の実走行軌跡Gをマッチングさせ、図3(a)および図3(b)に示すように自車両の現在位置をその道路上に特定してしまう(図中の推定現在位置I参照)。また、このように自車両の現在位置を誤って特定することにより、誤った現在位置をもとに再探索処理が行われ、図3(a)に示すように、誤った案内経路Hが表示装置19に表示され続けることになる。
【0066】
これに対して、本発明によれば、未登録高速道路Cの電波ビーコンからの電波を受信したこととマッチング確度とをもとに、自車両が未登録高速道路Cを走行中であることを判別し、例えば図3(b)に示すように、推定現在位置I以降の案内経路Hの表示装置19での表示を中止する。従って、誤った案内経路Hが案内されることがなく、ユーザに煩わしさを感じさせずに済む。なお、推定現在位置I以前の案内経路Hの表示装置19での表示も中止する構成としてももちろん構わない。
【0067】
また、前述の実施形態では、自車両が地図データに未登録の高速道路を走行中であるものと判別した場合に、経路案内を中止する構成を示したが、必ずしもこれに限らない。例えば、自車両が地図データに未登録の高速道路を走行中であるものと判別した場合に、経路案内を中止せずに、自車両が地図データに未登録の高速道路を走行中であることを示す提示や誤った経路案内が行われている可能性が高いことを示す提示等を制御装置28が表示装置19や音声出力装置20に行わせる構成としてもよい。
【0068】
なお、前述の実施形態では、経路案内を中止している間、自車両が地図データに未登録の高速道路を走行中であることを示す提示を行う構成を示したが、必ずしもこれに限らない。例えば、経路案内を中止している間、自車両が地図データに未登録の高速道路を走行中であることを示す提示を行わない構成としてもよい。
【0069】
また、前述の実施形態では、経路案内を中止するモードに移行した後もマップマッチング処理を逐次実行し、未登録高速道路判別用閾値よりも高いマッチング確度でマッチングする道路が現れた場合に経路案内を再開する構成を示したが、必ずしもこれに限らない。例えば、操作スイッチ群21やリモコン22を介してユーザから経路案内の再開を指示する旨の入力を制御装置28で受け付けた場合に、その時点(瞬間に限らず前後に幅があってもよい)でのマップマッチング処理で特定された地図上の道路における自車両の現在位置をもとに、再探索処理を行い、経路案内を再開する構成としてもよい。
【0070】
さらに、前述の実施形態では、自車両が案内経路を外れたと制御装置28が判断した場合に、自車両の現在位置から目的地までの移動経路を再度探索する再探索処理を行って案内経路を探索し直し、その案内経路について経路案内を行う構成を示したが、必ずしもこれに限らない。例えば、自車両が案内経路を外れたと制御装置28が判断した場合にも、従前の案内経路を例えば一定時間の間など表示し続ける構成としてもよい。
【0071】
この場合であっても、自車両が地図データに未登録の高速道路を走行中であるときには、マップマッチング処理によって地図データに登録された道路上に自車両の位置が特定されるため、表示装置19の地図上に表示される自車両の現在位置が誤って特定することになる。よって、案内経路と表示装置19の地図上に表示される自車両の現在位置との位置関係をもとにユーザが走行を行う場合に、誤った経路案内を受けることになる。従って、この場合であっても、本発明は有効に適用できる。
【0072】
なお、本発明は、上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【符号の説明】
【0073】
1 車載ナビゲーション装置、11 位置検出器(位置方向検出手段)、12 ジャイロスコープ、13 加速度センサ、14 車輪速センサ、15 GPS受信機、16 地図データ入力器、17 記憶媒体(地図データ記憶手段)、18 外部メモリ、19 表示装置、20 音声出力装置、21 操作スイッチ群、22 リモコン、23 リモコンセンサ、24 VICS受信機、25 FM多重受信機、26 光ビーコン受信機、27 電波ビーコン受信機(電波受信手段)、28 制御装置(マップマッチング手段、マッチング確度算出手段、未登録高速道路判別手段)
【技術分野】
【0001】
本発明は、車載ナビゲーション装置に関するものである。
【背景技術】
【0002】
従来から、車両のドライバを所定の目的地まで誘導する経路案内を行ったり、任意の地図を表示させたりする装置として、車載ナビゲーション装置が知られている。また、車載ナビゲーション装置では、自車両に設けられた各センサの信号をもとに検出された現在位置から特定される走行軌跡と電子地図(つまり、地図データ)上の道路データとを照合することによって、自車両の走行軌跡を地図上の道路にマッチングさせるマップマッチングを行っていることが知られている。
【0003】
しかしながら、従来の技術では、地図データに未登録である新規の高速道路を自車両が走行中の場合に、周辺の一般道路に自車両の走行軌跡を無理にマッチングさせてしまう誤ったマップマッチングを繰り返し、誤った経路案内を繰り返してしまうという問題点があった。
【0004】
これに対して、例えば、特許文献1および2には、高速道路上に設置されている電波ビーコンからの電波と一般道路上に設置されている光ビーコンからの光とのうちのいずれを車載ナビゲーション装置で受信しているかによって、現在の自車両が高速道路上にいるのか一般道路上にいるのかを判断する技術が開示されている。
【0005】
特許文献1および2に開示されている技術では、地図データに未登録の高速道路を走行中に、高速道路を走行中であることは判断できるものの、あくまで全ての高速道路のデータが地図データに含まれることを前提としているものであるため、未登録の高速道路を走行中であることを判断することはできない。
【0006】
そこで、この問題を解決する手段として、例えば、特許文献3には、ETCの入口ゲートや出口ゲートの通過時の通知を利用して未登録の新設有料道路を走行中か否かを判定する技術が開示されている。詳しくは、特許文献3に開示の技術では、ETC車載機から有料道路の入口ゲート通過が通知された際に現在位置周辺にインターチェンジが存在しない場合、もしくは、ETC車載機から有料道路の出口ゲート通過が通知されることなく、現在位置が有料道路上の位置から有料道路外の位置に変化した場合に、地図データに未登録の新設有料道路を走行中と判定する。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平8−189956号公報
【特許文献2】特開平11−83505号公報
【特許文献3】特開2009−92533号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献3に開示の技術は、地図データに未登録の高速道路を精度良く判別することができないという問題を有していた。詳しくは、高速道路の出入口に必ずしもETCゲートがあるとは限らず、均一料金精算タイプの高速道路の場合には高速道路の半ばにETCゲートがある場合もあるため、この場合には高速道路の半ばに至るまで、未登録の高速道路を走行中であることを判別できない。また、無料化された高速道路の場合にはETCゲートが存在しないことも考えられるが、この場合には未登録の高速道路を走行中であることを全く判別できない。
【0009】
本発明は、上記従来の問題点に鑑みなされたものであって、その目的は、地図データに未登録の高速道路を自車両が走行中であることをより精度良く判別することを可能にする車載ナビゲーション装置を提供することにある。
【課題を解決するための手段】
【0010】
請求項1の車載ナビゲーション装置によれば、高速道路に設けられた電波ビーコンからの電波を受信するので、電波ビーコンからの電波を受信したことを利用して、車両が高速道路を走行中であることを推定することができる。
【0011】
また、請求項1の構成によれば、電波ビーコンからの電波を受信しており、高速道路を走行中と推定されるときに、マッチング確度算出手段で算出したマッチング確度(つまり、マップマッチング手段でのマッチングの確かさを示す指標)が第1の所定の閾値以下であった場合には、車両が地図データに未登録の高速道路を走行中であるものと判別することになる。マッチング確度が低い場合には、地図データに未登録の道路を走行中である可能性が高いため、以上の構成によれば、高速道路を走行中ではあるが地図データに未登録の道路を走行中であることを判別することが可能になる。つまり、以上の構成によれば、地図データに未登録の高速道路を自車両が走行中であることを判別することが可能になる。
【0012】
また、高速道路に設けられた電波ビーコンは、一般的に交通道路情報を送信することを目的としており、ETCゲートのように課金処理に関する情報を送信することを目的としたものではない。よって、電波ビーコンからの電波を受信したことを利用することにより、無料化された高速道路であっても、車両が高速道路を走行中であることを判別することが可能になる。さらに、車載ナビゲーション装置において一般的にマッチングは逐次行われている。
【0013】
従って、以上の構成によれば、電波ビーコンからの電波を受信したこととマッチング確度とを利用することにより、高速道路上においてETCゲートの存在の有無や走行場所によらずに、地図データに未登録の高速道路を自車両が走行中であることをより精度良く判別することが可能になる。
【0014】
また、請求項2の構成によれば、電波ビーコンからの電波を受信するまでは、第2の所定の閾値よりも高いマッチング確度でマッチングする道路を車両の走行中の道路として特定することになる。また、一方、電波ビーコンからの電波を受信した後は、第2の所定の閾値よりも高い値が設定されている第1の所定の閾値よりも高いマッチング確度でマッチングする道路のみを車両の走行中の道路と特定し、第1の所定の閾値以下のマッチング確度でマッチングする道路しか存在しない場合に、車両が地図データに未登録の高速道路を走行中と判別することになる。
【0015】
つまり、以上の構成によれば、電波ビーコンからの電波を受信し、高速道路を走行中と推定されるまでは、従来まで用いられていたのと同様の比較的緩いマッチング確度で車両の走行中の道路を特定する一方、電波ビーコンからの電波を受信し、高速道路を走行中と推定された後は、従来まで用いられていたものよりも厳しいマッチング確度で車両の走行中の道路を特定することが可能になる。
【0016】
よって、以上の構成によれば、電波ビーコンからの電波を受信し、高速道路を走行中と推定された後は、第1の所定の閾値によって厳密に、車両が地図データに未登録の高速道路を走行中か否かを判別することが可能になる一方、電波ビーコンからの電波を受信し、高速道路を走行中と推定されるまでは、従来まで用いられていたのと同様の第2の所定の閾値によって従来までと同様に、マップマッチング手段で地図上の道路における車両の現在位置を特定することが可能になる。
【0017】
なお、地図データに未登録の一般道路はその距離が長いことは一般的に少なく、すぐに地図データに登録された道路に接続されるものと思われるため、誤った経路案内が生じた場合でも、すぐに正しい経路案内に復帰できる可能性が高い。よって、マッチングの条件を厳しくしてまで未登録の一般道路を自車両が走行中であることを判別する必要性は低いと考えられる。一方、地図データに未登録の高速道路はその距離が長いことが一般的であるため、すぐに地図データに登録された道路に接続されることがなく、誤った経路案内が生じた場合に誤った経路案内が繰り返され続ける可能性が高い。よって、マッチングの条件を厳しくしてまで未登録の高速道路を自車両が走行中であることを判別する必要性が高いと考えられる。従って、請求項2の構成によれば、マッチングの条件を厳しくする状況を、必要性が高い場合にのみ抑えることが可能になる。
【0018】
なお、特許文献3に開示の技術では、地図データに未登録の有料道路を走行していると判別している間、現在位置から目的地までの移動経路の更新を禁止する技術が開示されているが、誤った移動経路が案内されていることには変わりがないため、ユーザが煩わしさを感じてしまうという問題点を有していた。
【0019】
これに対して、請求項3の構成によれば、車両が地図データに未登録の高速道路を走行中であるものと判別した場合に、移動経路の案内を中止するので、誤った移動経路が案内されることがなく、ユーザに煩わしさを感じさせずに済む。
【0020】
また、請求項4のように、移動経路の案内を中止している間、車両が地図データに未登録の高速道路を走行中であることを示す提示を行う態様としてもよい。これによれば、車両が地図データに未登録の高速道路を走行中であるために移動経路の案内が中止されていることをユーザが容易に知ることができるので、故障のために移動経路の案内が中止されている場合と容易に区別することができ、ユーザを混乱させずに済む。
【0021】
また、請求項5のように、マップマッチング手段で地図上の道路における車両の現在位置を逐次特定し続け、マッチング確度算出手段で算出したマッチング確度が第1の所定の閾値よりも高くなった場合に、移動経路の案内の中止を解除する態様としてもよい。これによれば、自車両が地図データに未登録の高速道路から地図データに登録された道路に移り、高いマッチング確度でマッチングが行われるようになったときに、移動経路の案内の中止を解除することが可能になる。つまり、以上の構成によれば、正しい移動経路の案内が可能になった場合に、移動経路の案内を再開させることが可能になる。
【0022】
また、請求項6のように、移動経路の案内は、マップマッチング手段で特定した現在位置から車両が目的地に到達できる移動経路の案内である態様としてもよい。
【図面の簡単な説明】
【0023】
【図1】車載ナビゲーション装置1の概略的な構成を示すブロック図である。
【図2】車載ナビゲーション装置1の制御装置28での未登録高速道路判別関連処理のフローを示すフローチャートである。
【図3】(a)および(b)は経路案内時の表示装置19の画面の一例を示す模式図である。
【発明を実施するための形態】
【0024】
以下、本発明の実施形態について図面を用いて説明する。図1は、本発明が適用された車載ナビゲーション装置1の概略的な構成を示すブロック図である。図1に示す車載ナビゲーション装置1は、車両に搭載されるものであり、位置検出器11、地図データ入力器16、記憶媒体17、外部メモリ18、表示装置19、音声出力装置20、操作スイッチ群21、リモコン22、リモコンセンサ23、VICS(登録商標)受信機24、およびこれらと接続された制御装置28を備えている。なお、車載ナビゲーション装置1を搭載している車両を以降では自車両と呼ぶ。
【0025】
位置検出器11は、車両の鉛直方向周りの角速度を検出するジャイロスコープ12、自車両の加速度を検出する加速度センサ13、各転動輪の回転速度から自車両の速度を検出する車輪速センサ14、および人工衛星からの電波に基づいて車両の現在位置を検出するGPS(Global Positioning System)のためのGPS受信機15を有しており、定期的に自車両の現在位置および進行方向の検出を行う。よって、位置検出器11が請求項の位置方向検出手段に相当する。これらの各センサ12〜15は、各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、精度によっては上述した内の一部で構成してもよく、さらに、図示しない地磁気センサやステアリングの回転センサ等を用いてもよい。
【0026】
なお、車載ナビゲーション装置1では、自律航法と電波航法とを組み合わせたハイブリッド航法によって自車両の現在位置を定期的に特定する。そして、定期的に特定した現在位置および進行方向から得られる自車両の走行軌跡と後述する道路データとを照合することによって自車両の走行軌跡を道路上にマッチングさせ、地図上の道路における自車両の現在位置を特定する。なお、自律航法とは、ジャイロスコープ12等の方位センサの測定値と加速度センサ13や車輪速センサ14の測定値とから自車両の現在位置を推定する方法である。また、電波航法とは、複数の人工衛星からの電波に基づいてGPS受信機15で自車両の座標(緯度・経度)を測位し、現在位置を推定する方法である。なお、定期的に特定した現在位置から得られる自車両の走行軌跡と後述する道路データとを照合することによって自車両の走行軌跡を道路上にマッチングさせ、地図上の道路における自車両の現在位置を特定する処理を本実施形態ではマップマッチング処理と呼ぶこととする。
【0027】
地図データ入力器16は、記憶媒体17が装着され、その記憶媒体17に格納されている位置検出の精度向上のためのいわゆるマップマッチング用データ、地図データ、および目印データを含む各種データを入力するための装置である。地図データには、道路を示すリンクデータとノードデータとが含まれる。なお、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンク方向、リンク方位、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別、道路幅員、車線数、右折・左折専用車線の有無とその専用車線の数、および制限速度等の各データから構成される。よって、記憶媒体17が請求項の地図データ記憶手段に相当する。
【0028】
一方、ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、および交差点種類等の各データから構成される。
【0029】
また、記憶媒体17には、各種施設の種類、名称、住所のデータなども記憶されており、それらのデータは経路探索の際の目的地設定などに用いられる。なお、記憶媒体17としては、CD−ROMまたはDVD−ROM、メモリカード、HDD等が用いられる。
【0030】
外部メモリ18は、HDD等の書き込み可能な大容量記憶装置である。外部メモリ18には大量のデータや電源をOFFしても消去してはいけないデータを記憶したり、頻繁に使用するデータを地図データ入力器16からコピーして利用したりする等の用途がある。
【0031】
表示装置19は、車両の走行を案内するための地図や目的地選択画面等を表示するものであって、例えばフルカラー表示が可能なものであり、液晶ディスプレイ、有機ELディスプレイ、プラズマディスプレイ等を用いて構成することができる。音声出力装置20は、スピーカ等から構成され、制御装置28の指示に基づいて、経路案内時の案内音声などを出力する。
【0032】
操作スイッチ群21は、例えば表示装置19と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、スイッチ操作により制御装置28へ各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等)の操作指示を行う。また、操作スイッチ群21は、出発地および目的地を設定するためのスイッチを含んでいる。そのスイッチを操作することによって、ユーザ(つまり、自車両の乗員)は、予め登録しておいた地点、施設名、電話番号、住所などから、出発地および目的地を設定することができる。
【0033】
リモコン22には複数の操作スイッチ(図示せず)が設けられ、スイッチ操作によりリモコンセンサ23を介して各種指令信号を制御装置28に入力することにより、操作スイッチ群21と同じ機能を制御装置28に対して実行させることが可能である。
【0034】
VICS受信機24は、各地のFM放送局を介して、VICSセンタから配信される渋滞情報等の道路交通情報を受信するFM多重受信機25、一般道路に敷設された光ビーコンを介して、VICSセンタから配信される渋滞情報等の道路交通情報を受信する光ビーコン受信機26、高速道路に敷設された電波ビーコンを介して、VICSセンタから配信される渋滞情報等の道路交通情報を受信する電波ビーコン受信機27を備えている。また、VICS受信機24は、受信した道路交通情報を制御装置28に出力する。なお、ここで言うところの高速道路とは、例えば高速自動車国道や都市高速道路や自動車専用道路を示している。また、一般道路とは、例えば上記高速道路以外の道路を示している。
【0035】
なお、FM多重受信機25は、FM放送波に多重化して上述のFM放送局から送信される道路交通情報を受信し、光ビーコン受信機26は、上述の光ビーコンから光によって送信される道路交通情報を受信し、電波ビーコン受信機27は、上述の電波ビーコンから電波によって送信される道路交通情報を受信する。よって、電波ビーコン受信機27が請求項の電波受信手段に相当する。
【0036】
制御装置28は、CPU、ROM、RAM、バックアップRAM等よりなるマイクロコンピュータを主体として構成される。そして、制御装置28は、位置検出器11、地図データ入力器16、外部メモリ18、操作スイッチ群21、リモコンセンサ23、VICS受信機24から入力された各種情報に基づき、一般的なナビゲーション機能としての処理(例えば、地図縮尺変更処理、メニュー表示選択処理、マップマッチング処理、目的地設定処理、経路探索実行処理、経路案内処理、現在位置修正処理、再探索処理、表示画面変更処理、音量調整処理等)や後述する地図データに未登録の高速道路の判別に関連する処理(以下、未登録高速道路判別関連処理)などを実行する。
【0037】
例えば、経路探索実行処理においては、制御装置28は、操作スイッチ群21、リモコン22から出発地および目的地が入力されると、距離優先、時間優先等の予め設定された条件を満たす、目的地に到達するのに最適な移動経路(以下、案内経路)を、公知のダイクストラ法を用いて探索する。なお、出発地については、位置検出器11から入力される自車両の現在位置を用いる構成としてもよい。
【0038】
また、経路案内処理においては、例えば制御装置28は、経路探索実行処理において探索された案内経路(具体的には案内経路を示すマークや線など)を、表示装置19に表示する地図上に重畳表示させことによって経路案内を行ったり、その案内経路に沿った目的地までの走行を誘導する案内表示を表示装置19に行わせたり、その案内経路に沿った目的地までの走行を誘導する案内音声を音声出力装置20に出力させたりすることによっても経路案内を行う。
【0039】
さらに、マップマッチング処理においては、制御装置28は、前述したように、位置検出器11から定期的に特定した現在位置および進行方向から得られる自車両の走行軌跡と道路データとを照合することによって自車両の走行軌跡を道路(詳しくは道路データのうちのリンク)上にマッチングさせ、地図上の道路における自車両の現在位置を特定する。よって、制御装置28が請求項のマップマッチング手段に相当する。
【0040】
また、制御装置28は、マップマッチング処理において、自車両の走行軌跡と道路データのうちのリンクとのマッチングがどれくらい確からしいかというマッチングの確からしさを示す指標であるマッチング確度を算出する。よって、制御装置28が請求項のマッチング確度算出手段に相当する。なお、マッチング確度は、公知の方法によって算出する構成とすればよい。例えばマッチング確度は、自車両の各種センサの異常(断線・短絡等による故障)、車両の各種センサの状態(GPS受信状況・センサ学習状況)、マッチングにおける形状相関や方位ずれ、マッチング候補の数などをもとに算出されるものとする。
【0041】
そして、制御装置28は、マップマッチング処理において、マッチング確度が通常時に設定の閾値(以下、通常設定閾値)よりも高かった場合に、自車両の走行軌跡とマッチングした道路を自車両が走行中の道路とし、地図上の道路における自車両の現在位置を特定する。また、ここで言うところの通常設定閾値とは、一般的なナビゲーション装置において自車両の走行軌跡とマッチングしたか否かを判定する際に用いられる閾値と同様の値のものであって、マッチングの条件を定めるものである。なお、通常設定閾値が請求項の第2の所定の閾値に相当する。
【0042】
なお、本実施形態では、マッチング確度が通常設定閾値よりも高かった場合に、自車両の走行軌跡とマッチングした道路を自車両が走行中の道路とし、地図上の道路における自車両の現在位置を特定する構成を示したが、必ずしもこれに限らない。例えば、通常設定閾値とは関係なく、最も高いマッチング確度でマッチングした道路を自車両が走行中の道路とする構成としてもよい。
【0043】
また、制御装置28は、マップマッチング処理を逐次実行し、地図上の道路における自車両の現在位置を逐次特定し続ける。そして、例えば自車両が案内経路を外れたと制御装置28が判断した場合には、自車両の現在位置から目的地までの移動経路を再度探索する再探索処理を行って、自車両の現在位置から目的地までの案内経路を探索し直し、その案内経路について経路案内を行う。なお、再探索処理においても経路探索実行処理と同様にして案内経路を探索する構成とすればよい。
【0044】
次に、図2を用いて、車載ナビゲーション装置1の制御装置28での未登録高速道路判別関連処理のフローについての説明を行う。図2は、車載ナビゲーション装置1の制御装置28での未登録高速道路判別関連処理のフローを示すフローチャートである。なお、本フローは、車載ナビゲーション装置1の制御装置28で経路案内処理が実行され、経路案内が開始されたときに開始される。つまり、本フローの開始時点においては、案内経路が表示装置19に表示されており、例えばその案内経路についての表示装置19での案内表示や音声出力装置20からの案内音声の出力も開始されているものとする。
【0045】
まず、ステップS1では、電波ビーコン受信機27で電波を受信したか否かを制御装置28が判定する。制御装置28は、例えば電波ビーコン受信機27から道路交通情報が入力された場合に、電波ビーコン受信機27で電波を受信したと判定する構成とすればよい。そして、電波ビーコン受信機27で電波を受信した場合(ステップS1でYES)には、ステップS2に移る。また、電波ビーコン受信機27で電波を受信したと判定しなかった場合(ステップS1でNO)には、ステップS9に移る。
【0046】
ステップS2では、電波ビーコン受信機27で電波を受信したと判定したときにおける前述のマッチング確度を制御装置28が算出し、ステップS3に移る。なお、電波ビーコン受信機27で電波を受信したと判定したときとは、電波ビーコン受信機27で電波を受信したと判定した瞬間に限定されるものではなく、電波ビーコン受信機27で電波を受信したと判定した瞬間に前後する時間も含まれるものとする。
【0047】
ステップS3では、ステップS2で算出したマッチング確度が、地図データに未登録の高速道路の判別用の閾値(以下、未登録高速道路判別用閾値)以下であるか否かを制御装置28が判定する。なお、ここで言うところの未登録高速道路判別用閾値とは、通常設定閾値が車載ナビゲーション装置1で用いられている場合にはこの通常設定閾値よりも高い値に設定される、任意の閾値である。なお、未登録高速道路判別用閾値が請求項の第1の所定の閾値に相当する。そして、マッチング確度が未登録高速道路判別用閾値以下であると判定した場合(ステップS3でYES)には、ステップS4に移る。また、マッチング確度が未登録高速道路判別用閾値以下であると判定しなかった場合(ステップS3でNO)には、ステップS9に移る。
【0048】
ステップS4では、地図データに未登録の高速道路を自車両が走行中であるものと制御装置28が判別し、経路案内中止処理を行ってステップS5に移る。よって、制御装置28が請求項の未登録高速道路判別手段にも相当する。経路案内中止処理では、制御装置28が経路案内を中止させる。つまり、表示装置19での案内経路の表示を中止させたり、案内経路についての表示装置19での案内表示や音声出力装置20からの案内音声の出力を中止させたりする。なお、この場合、表示装置19での地図の表示も中止させる構成であってもよいし、地図の表示は中止させない構成としてもよい。
【0049】
ステップS5では、メッセージ表示処理を行い、ステップS6に移る。メッセージ表示処理では、地図データに未登録の高速道路を自車両が走行中であるため経路案内を中止している特殊なモードであることをユーザに知らせる旨の表示を制御装置28が表示装置19に行わせる。例えば表示装置19の画面上部に「新規高速道路走行中」などのオンスクリーンメッセージを表示させる構成とすればよい。また、例えば表示装置19の画面内に新規高速道路を走行中であることを示すアイコンを表示させる構成としてもよい。
【0050】
ステップS6では、前述のマッチング確度を制御装置28が算出し、ステップS7に移る。ステップS7では、ステップS6で算出したマッチング確度が、未登録高速道路判別用閾値以下であるか否かを制御装置28が判定する。そして、マッチング確度が未登録高速道路判別用閾値以下であると判定した場合(ステップS7でYES)には、ステップS6に戻ってフローを繰り返す。また、マッチング確度が未登録高速道路判別用閾値以下であると判定しなかった場合(ステップS7でNO)には、ステップS8に移る。ステップS8では、経路案内中止解除処理を行い、ステップS9に移る。経路案内中止解除処理では、制御装置28が経路案内の中止を解除して経路案内を再開させる。
【0051】
つまり、経路案内を中止するモードに移行した後も、経路案内は行わないものの、マップマッチング処理は逐次実行し、未登録高速道路判別用閾値よりも高いマッチング確度でマッチングする道路(高速道路および一般道路のいずれであってもよい)が現れた場合に、経路案内を再開することになる。
【0052】
ステップS9では、自車両のイグニッション(IG)スイッチがオフになった場合(ステップS9でYES)には、フローを終了する。また、自車両のIGスイッチがオフになっていない場合(ステップS9でNO)には、ステップS1に戻ってフローを繰り返す。なお、本フローは、フローの途中であっても、自車両のナビゲーション装置1が電源オフされたときに終了するものとする。
【0053】
マッチング確度が低い場合には、地図データに未登録の道路を走行中である可能性が高いため、以上の構成によれば、地図データに未登録の高速道路を自車両が走行中であることを判別することが可能になる。また、高速道路に設けられた電波ビーコンは、一般的に交通道路情報を送信することを目的としており、ETCゲートのように課金処理に関する情報を送信することを目的としたものではない。よって、電波ビーコンからの電波を受信したことを利用することにより、無料化された高速道路であっても、車両が高速道路を走行中であることを判別することが可能になる。さらに、車載ナビゲーション装置においては一般的にマッチングが逐次行われている。
【0054】
従って、以上の構成によれば、電波ビーコンからの電波を受信したこととマッチング確度とを利用することにより、高速道路上においてETCゲートの存在の有無や走行場所によらずに、地図データに未登録の高速道路を自車両が走行中であることをより精度良く判別することが可能になる。
【0055】
また、地図データに登録された一般道路を走行時に高速道路に設けられた電波ビーコンからの電波を誤受信した際にも、マップマッチング処理によって自車両の走行軌跡が当該一般道路上に高いマッチング確度でマッチングすると考えられる。よって、以上の構成によれば、当該一般道路を走行時に当該電波ビーコンからの電波を誤受信した際にも、マッチング確度が未登録高速道路判別用閾値よりも高くなる可能性が高く、当該一般道路を走行時に地図データに未登録の高速道路を走行中と判別される不具合がより生じにくい。
【0056】
さらに、以上の構成によれば、自車両が地図データに未登録の高速道路を走行中であるものと判別した場合に、経路案内を中止するので、誤った案内経路が案内されることがなく、ユーザに煩わしさを感じさせずに済む。
【0057】
また、以上の構成によれば、経路案内を中止している間、自車両が地図データに未登録の高速道路を走行中であることを示す提示を行うので、自車両が地図データに未登録の高速道路を走行中であるために移動経路の案内が中止されていることをユーザが容易に知ることができ、故障のために経路案内が中止されている場合と容易に区別することができる。従って、以上の構成によれば、ユーザを混乱させずに済む。
【0058】
さらに、以上の構成によれば、経路案内を中止するモードに移行した後もマップマッチング処理を逐次実行し、未登録高速道路判別用閾値よりも高いマッチング確度でマッチングする道路が現れた場合に経路案内を再開するので、正しい経路案内が可能になった場合に、経路案内を再開させることが可能になる。
【0059】
なお、以上の構成において、未登録高速道路判別用閾値は、通常設定閾値が車載ナビゲーション装置1で用いられている場合にはこの通常設定閾値よりも高い値に設定されていることが好ましい。
【0060】
以上の構成によれば、高速道路に設けられた電波ビーコンからの電波を受信し、高速道路を走行中と推定された後は、未登録高速道路判別用閾値によって厳密に、自車両が地図データに未登録の高速道路を走行中か否かを判別することが可能になる一方、当該電波ビーコンからの電波を受信し、高速道路を走行中と推定されるまでは、従来まで用いられていたのと同様の通常設定閾値によって従来までと同様に、マップマッチング処理で地図上の道路における自車両の現在位置を特定することが可能になる。
【0061】
なお、地図データに未登録の一般道路はその距離が長いことは一般的に少なく、すぐに地図データに登録された道路に接続されるものと思われるため、誤った経路案内が生じた場合でも、すぐに正しい経路案内に復帰できる可能性が高い。よって、マッチングの条件を厳しくしてまで未登録の一般道路を自車両が走行中であることを判別する必要性は低いと考えられる。一方、地図データに未登録の高速道路はその距離が長いことが一般的であるため、すぐに地図データに登録された道路に接続されることがなく、誤った経路案内が生じた場合に誤った経路案内が繰り返され続ける可能性が高い。よって、マッチングの条件を厳しくしてまで未登録の高速道路を自車両が走行中であることを判別する必要性が高いと考えられる。従って、以上の構成によれば、マッチングの条件を厳しくする状況を、必要性が高い場合にのみ抑えることが可能になる。
【0062】
ここで、本発明における作用効果について、具体的に図3(a)および図3(b)を用いて説明を行う。図3(a)および図3(b)は、経路案内時の表示装置19の画面の一例を示す模式図である。なお、図3(a)および図3(b)中のAで示す細実線が地図データに登録された一般道路(以下、登録一般道路)を表しており、Bで示す太実線が地図データに登録された高速道路(以下、登録高速道路)を表しており、Cで示す細破線が地図データに未登録の高速道路(以下、未登録高速道路)を表している。また、図3(a)および図3(b)中のDが地図データに登録された高速道路の料金所(以下、登録料金所)を表しており、Eが地図データに未登録の高速道路の料金所(以下、未登録料金所)を表している。
【0063】
さらに、図3(a)および図3(b)中のFで示す破線の矢印が自車両の実際の現在位置(以下、実現在位置)を表しており、その矢印の向きが自車両の実際の進行方向を表している。また、図3(a)および図3(b)中のGで示す細点線が自車両の実際の走行軌跡(以下、実走行軌跡)を表しており、Hで示す太点線が案内経路を表している。そして、図3(a)および図3(b)中のIで示す実線の矢印がマップマッチング処理で特定される自車両の現在位置(以下、推定現在位置)を表しており、その矢印の向きがマップマッチング処理で特定される自車両の進行方向を表している。また、経路案内時の表示装置19の画面には、未登録高速道路C、未登録料金所E、実現在位置F、および実走行軌跡Gは表示されない。なお、案内経路Hのうちの、推定現在位置以前の部分については、マップマッチング処理で特定される自車両の走行軌跡を表示する構成としてもよい。
【0064】
自車両が登録高速道路Bを走行中の場合には、マップマッチング処理によって自車両の実走行軌跡Gが登録高速道路Bに高いマッチング確度でマッチングする可能性が高いため、図3(a)および図3(b)に示すように、案内経路Hも登録高速道路Bに沿ったものとなる。しかしながら、自車両が登録高速道路Bから未登録高速道路Cに進入した後は、未登録高速道路Cの道路データが地図データに存在しないため、マップマッチング処理によって自車両の実走行軌跡Gを未登録高速道路Cにマッチングできなくなる。
【0065】
そして、マップマッチング処理によって自車両の実走行軌跡Gを未登録高速道路Cにマッチングできないため、周辺の道路のうちの例えば最もマッチング確度の高い道路(本例では登録一般道路A)に自車両の実走行軌跡Gをマッチングさせ、図3(a)および図3(b)に示すように自車両の現在位置をその道路上に特定してしまう(図中の推定現在位置I参照)。また、このように自車両の現在位置を誤って特定することにより、誤った現在位置をもとに再探索処理が行われ、図3(a)に示すように、誤った案内経路Hが表示装置19に表示され続けることになる。
【0066】
これに対して、本発明によれば、未登録高速道路Cの電波ビーコンからの電波を受信したこととマッチング確度とをもとに、自車両が未登録高速道路Cを走行中であることを判別し、例えば図3(b)に示すように、推定現在位置I以降の案内経路Hの表示装置19での表示を中止する。従って、誤った案内経路Hが案内されることがなく、ユーザに煩わしさを感じさせずに済む。なお、推定現在位置I以前の案内経路Hの表示装置19での表示も中止する構成としてももちろん構わない。
【0067】
また、前述の実施形態では、自車両が地図データに未登録の高速道路を走行中であるものと判別した場合に、経路案内を中止する構成を示したが、必ずしもこれに限らない。例えば、自車両が地図データに未登録の高速道路を走行中であるものと判別した場合に、経路案内を中止せずに、自車両が地図データに未登録の高速道路を走行中であることを示す提示や誤った経路案内が行われている可能性が高いことを示す提示等を制御装置28が表示装置19や音声出力装置20に行わせる構成としてもよい。
【0068】
なお、前述の実施形態では、経路案内を中止している間、自車両が地図データに未登録の高速道路を走行中であることを示す提示を行う構成を示したが、必ずしもこれに限らない。例えば、経路案内を中止している間、自車両が地図データに未登録の高速道路を走行中であることを示す提示を行わない構成としてもよい。
【0069】
また、前述の実施形態では、経路案内を中止するモードに移行した後もマップマッチング処理を逐次実行し、未登録高速道路判別用閾値よりも高いマッチング確度でマッチングする道路が現れた場合に経路案内を再開する構成を示したが、必ずしもこれに限らない。例えば、操作スイッチ群21やリモコン22を介してユーザから経路案内の再開を指示する旨の入力を制御装置28で受け付けた場合に、その時点(瞬間に限らず前後に幅があってもよい)でのマップマッチング処理で特定された地図上の道路における自車両の現在位置をもとに、再探索処理を行い、経路案内を再開する構成としてもよい。
【0070】
さらに、前述の実施形態では、自車両が案内経路を外れたと制御装置28が判断した場合に、自車両の現在位置から目的地までの移動経路を再度探索する再探索処理を行って案内経路を探索し直し、その案内経路について経路案内を行う構成を示したが、必ずしもこれに限らない。例えば、自車両が案内経路を外れたと制御装置28が判断した場合にも、従前の案内経路を例えば一定時間の間など表示し続ける構成としてもよい。
【0071】
この場合であっても、自車両が地図データに未登録の高速道路を走行中であるときには、マップマッチング処理によって地図データに登録された道路上に自車両の位置が特定されるため、表示装置19の地図上に表示される自車両の現在位置が誤って特定することになる。よって、案内経路と表示装置19の地図上に表示される自車両の現在位置との位置関係をもとにユーザが走行を行う場合に、誤った経路案内を受けることになる。従って、この場合であっても、本発明は有効に適用できる。
【0072】
なお、本発明は、上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。
【符号の説明】
【0073】
1 車載ナビゲーション装置、11 位置検出器(位置方向検出手段)、12 ジャイロスコープ、13 加速度センサ、14 車輪速センサ、15 GPS受信機、16 地図データ入力器、17 記憶媒体(地図データ記憶手段)、18 外部メモリ、19 表示装置、20 音声出力装置、21 操作スイッチ群、22 リモコン、23 リモコンセンサ、24 VICS受信機、25 FM多重受信機、26 光ビーコン受信機、27 電波ビーコン受信機(電波受信手段)、28 制御装置(マップマッチング手段、マッチング確度算出手段、未登録高速道路判別手段)
【特許請求の範囲】
【請求項1】
車両に搭載され、
前記車両の現在位置および進行方向を検出する位置方向検出手段と、
少なくとも道路のデータを含む地図データを記憶している地図データ記憶手段と、
前記位置方向検出手段が検出した前記車両の現在位置および進行方向と前記地図データ記憶手段に記憶された地図データとに基づいて、前記車両の走行軌跡を道路上にマッチングさせ、地図上の道路における前記車両の現在位置を特定するマップマッチング手段と、を備えるとともに、
前記車両が目的地に到達できる移動経路を案内する車載ナビゲーション装置であって、
前記マップマッチング手段でのマッチングの確かさを示す指標であるマッチング確度を算出するマッチング確度算出手段と、
高速道路に設けられた電波ビーコンからの電波を受信する電波受信手段と、
前記電波受信手段で前記電波ビーコンからの電波を受信したときに、前記マッチング確度算出手段で算出したマッチング確度が第1の所定の閾値以下であった場合には、前記車両が前記地図データに未登録の高速道路を走行中であるものと判別する未登録高速道路判別手段と、を備えていることを特徴とする車載ナビゲーション装置。
【請求項2】
請求項1において、
前記マップマッチング手段は、前記マッチング確度算出手段で算出したマッチング確度が第2の所定の閾値以下である場合に、前記車両の走行軌跡がマッチングした道路を前記車両の走行中の道路とし、地図上の道路における前記車両の現在位置を特定するものであって、
前記第1の所定の閾値には、前記第2の所定の閾値よりも高い値が設定されていることを特徴とする車載ナビゲーション装置。
【請求項3】
請求項1または2において、
前記未登録高速道路判別手段で前記車両が前記地図データに未登録の高速道路を走行中であるものと判別した場合に、前記移動経路の案内を中止することを特徴とする車載ナビゲーション装置。
【請求項4】
請求項3において、
前記移動経路の案内を中止している間、前記車両が前記地図データに未登録の高速道路を走行中であることを示す提示を行うことを特徴とする車載ナビゲーション装置。
【請求項5】
請求項3または4において、
前記マップマッチング手段は、前記移動経路の案内を中止している間、前記位置方向検出手段が検出した前記車両の現在位置および進行方向と前記地図データ記憶手段に記憶された地図データとに基づいて、前記車両の走行軌跡を道路上に逐次マッチングさせ、地図上の道路における前記車両の現在位置を逐次特定し続け、
前記マッチング確度算出手段で算出したマッチング確度が前記第1の所定の閾値よりも高くなった場合に、前記移動経路の案内の中止を解除することを特徴とする車載ナビゲーション装置。
【請求項6】
請求項1〜5のいずれか1項において、
前記移動経路の案内は、前記マップマッチング手段で特定した現在位置から前記車両が目的地に到達できる移動経路の案内であることを特徴とする車載ナビゲーション装置。
【請求項1】
車両に搭載され、
前記車両の現在位置および進行方向を検出する位置方向検出手段と、
少なくとも道路のデータを含む地図データを記憶している地図データ記憶手段と、
前記位置方向検出手段が検出した前記車両の現在位置および進行方向と前記地図データ記憶手段に記憶された地図データとに基づいて、前記車両の走行軌跡を道路上にマッチングさせ、地図上の道路における前記車両の現在位置を特定するマップマッチング手段と、を備えるとともに、
前記車両が目的地に到達できる移動経路を案内する車載ナビゲーション装置であって、
前記マップマッチング手段でのマッチングの確かさを示す指標であるマッチング確度を算出するマッチング確度算出手段と、
高速道路に設けられた電波ビーコンからの電波を受信する電波受信手段と、
前記電波受信手段で前記電波ビーコンからの電波を受信したときに、前記マッチング確度算出手段で算出したマッチング確度が第1の所定の閾値以下であった場合には、前記車両が前記地図データに未登録の高速道路を走行中であるものと判別する未登録高速道路判別手段と、を備えていることを特徴とする車載ナビゲーション装置。
【請求項2】
請求項1において、
前記マップマッチング手段は、前記マッチング確度算出手段で算出したマッチング確度が第2の所定の閾値以下である場合に、前記車両の走行軌跡がマッチングした道路を前記車両の走行中の道路とし、地図上の道路における前記車両の現在位置を特定するものであって、
前記第1の所定の閾値には、前記第2の所定の閾値よりも高い値が設定されていることを特徴とする車載ナビゲーション装置。
【請求項3】
請求項1または2において、
前記未登録高速道路判別手段で前記車両が前記地図データに未登録の高速道路を走行中であるものと判別した場合に、前記移動経路の案内を中止することを特徴とする車載ナビゲーション装置。
【請求項4】
請求項3において、
前記移動経路の案内を中止している間、前記車両が前記地図データに未登録の高速道路を走行中であることを示す提示を行うことを特徴とする車載ナビゲーション装置。
【請求項5】
請求項3または4において、
前記マップマッチング手段は、前記移動経路の案内を中止している間、前記位置方向検出手段が検出した前記車両の現在位置および進行方向と前記地図データ記憶手段に記憶された地図データとに基づいて、前記車両の走行軌跡を道路上に逐次マッチングさせ、地図上の道路における前記車両の現在位置を逐次特定し続け、
前記マッチング確度算出手段で算出したマッチング確度が前記第1の所定の閾値よりも高くなった場合に、前記移動経路の案内の中止を解除することを特徴とする車載ナビゲーション装置。
【請求項6】
請求項1〜5のいずれか1項において、
前記移動経路の案内は、前記マップマッチング手段で特定した現在位置から前記車両が目的地に到達できる移動経路の案内であることを特徴とする車載ナビゲーション装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2011−220688(P2011−220688A)
【公開日】平成23年11月4日(2011.11.4)
【国際特許分類】
【出願番号】特願2010−86342(P2010−86342)
【出願日】平成22年4月2日(2010.4.2)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年11月4日(2011.11.4)
【国際特許分類】
【出願日】平成22年4月2日(2010.4.2)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]